ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM. Dr. Lim Chee Chin
|
|
|
- Nancy Newton
- 5 years ago
- Views:
Transcription
1 ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin
2 Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency sampling DTFT and DFT Relationship DFT to other transforms Properties of Discrete Fourier Transforms Circular and Linear Convolution Filtering Long Duration Sequences
3 Introduction A signal can be either continuous or discrete, and it can be either periodic or aperiodic. The combination of these two features generates the four categories of Fourier Transform. Period ic Aperi odic Continuous Continuous Fourier Series (CFS) Time Domain Continuous Time Fourier Transform (CTFT) Frequency Domain Continuous Fourier Transform Discrete Discrete Fourier Series (DFS) Time Domain Discrete Time Fourier Transform (DTFT) Frequency Domain Discrete Fourier Transform (DFT)
4 Introduction
5 Discrete Fourier Series (DFS) Exponential Form Trigonometric Form Relationship Exponential Form and Trigonometric Form Properties of DFS
6 Discrete Fourier Series A periodic discrete time signal x(n) of period N can be expressed as a weighted sum of a complex exponential sequences Since the sinusoidal sequence are unique only for digital frequencies from 0 to 2π, then expansion contain only finite number of complex exponential Exponential Form of Fourier Series for a periodic discrete time signal:, for all n ; 0 2, for all k ; 0 where the coefficients of expansion X(k) and the fundamental digital frequency are given by
7 DFS The above equation are called the Discrete Fourier Series (DFS) pair. The exponential form of the Fourier series for a periodic discrete signal can be written as where
8 DFS In term of an alternative (Trigonometric Form) the Discrete Fourier Series for the continuous time periodic signal, it can be expression for odd and even
9

10 Relationships between Exponential and Trigonometric Forms of DFS
 shown in")
11 Example Question: Find both the exponential and trigonometric forms of the Discrete Fourier Series representation of x(n) shown in Figure.
12 Solution:
: Trigonometric Form")

13 Solution (Cont.): Trigonometric Form of DFS is determined by odd and even:
14 Exercise: Find the exponential form of DFS for the signal x(n) given by x(n) = { 1,0,1,1,1,0,1,1,1,0,1,1,1,0,1,1, } Answer:{10,11,7,9,14,8,5,2} for linear convolution
15 Properties of Discrete Fourier Series 1. Linearity x1(n) and x2(n) both with period N, such that DFS[x1(n)] = X1(k) DFS[x2(n)] = X2(k) DFS[a1x1(n) + a2x2(n)] = X1(k) + X2(k)
16 Properties of Discrete Fourier Series 2. Time Shifting If x(n) is a periodic sequence with N samples DFS[x(n)] = X(k) DFS[x2(n m)] = X2(k) Where (n m) is a shifted version of x(n).
17 Properties of Discrete Fourier Series 3. Symmetry Property DFS[x*(n)] = X*( k) and DFS[x*( n)] = X*(k) DFS DFS DFS DFS We know that DFS DFS DFS DFS
18 Properties of Discrete Fourier Series 4. Periodic Convolution x1(n) and x2(n) both be two periodic sequences with period N DFS[x1(n)] = X1(k) DFS[x2(n)] = X2(k) If X3(k)= X1(k) X2(k), then periodic sequence x3(n) with Fourier series coefficients X3(k) is So,
19 Discrete Time Fourier Transform (DTFT) DTFT Definition DTFT to IDFT DTFT to DFT

20 DTFT Definition Transforming n Frequency domain Discrete time Frequency Digital Frequency, = 0 to 2 periodic Analog Frequency, Ω = to either periodic or aperiodic

21 DTFT to IDTFT. Discrete signal Continuous periodic (0, 2)
22 DTFT to DFT DTFT of a discrete time sequence x(n) is represented by the complex exponential sequence [ ], where is the real frequency variable. This transform is useful to map the time domain sequence into a continuous function of a frequency variable. The DTFT and the z transform are applicable to any arbitrary sequences, whereas the DFT can be applied only to finite length sequences.


23 Relationship DTFT and DFT
24 DTFT vs. DFT DTFT w takes continuous values from 0 t 2 Sampling is performed only frequency domain Continuous function of w. DFT k=1, 2, 3, N 1 takes only discrete values of k. Sampling is performed in both time and in time domain. Discrete frequency spectrum
25 Example DTFT Find DTFT of the following finite duration Answer:

26 Example DTFT Question: Determine the Fourier transform for the given discrete time DTFT and compute the corresponding amplitude and phase spectrum.
27 Solution

28 Exercise Determine the Fourier transform for the given discrete time signal and compute the corresponding amplitude and phase spectrum.
29 Discrete Fourier Transform (DFT) Definition DFT & IDFT
30 Definition DFT & IDFT DFT computes the values of the z-transform for evenly spaced points around the unit circle for a given sequence.
31 Relationship between DFT & Other Relationship to the Fourier Series Coefficients of a Periodic Sequences Fourier Series of a periodic sequence Fourier Series coefficients / / Comparing both equation, define a sequences x(n) is identical to xp(n) over a single period, Fourier Series coefficients Fundamental period, N
32 Relationship to the Fourier Series Coefficients of a Periodic Sequences If a periodic sequence is formed by periodically repeating x(n) every N samples n The discrete frequency domain IDFT n 1 /, 1,2,, N 1 k/,
33 Relationship to the Spectrum of an Infinite Duration (Aperiodic) Signal

34 Relationship of the DFT to z transform
35 Example Question Determine the DFT of the sequence
36 Solution
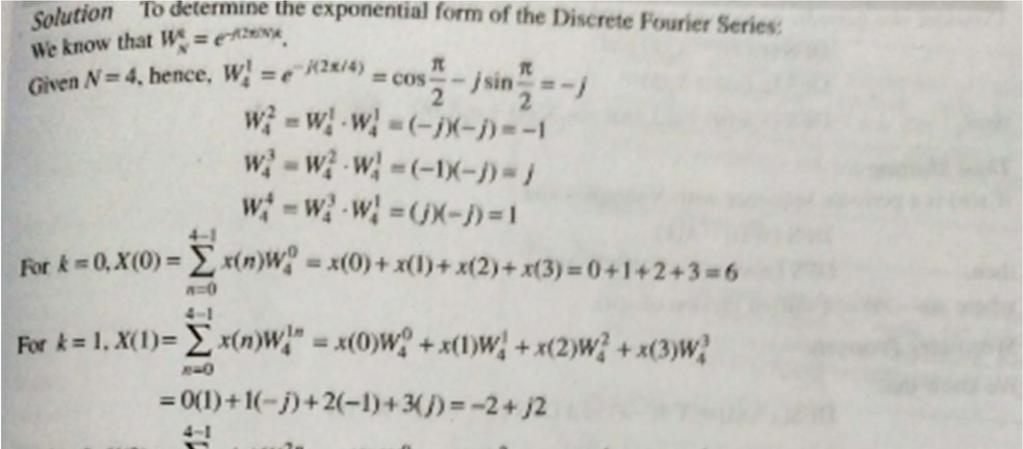
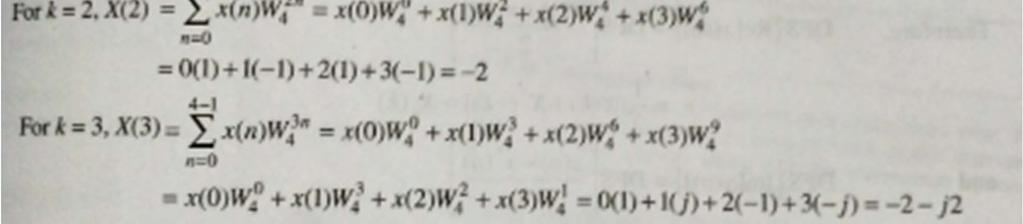
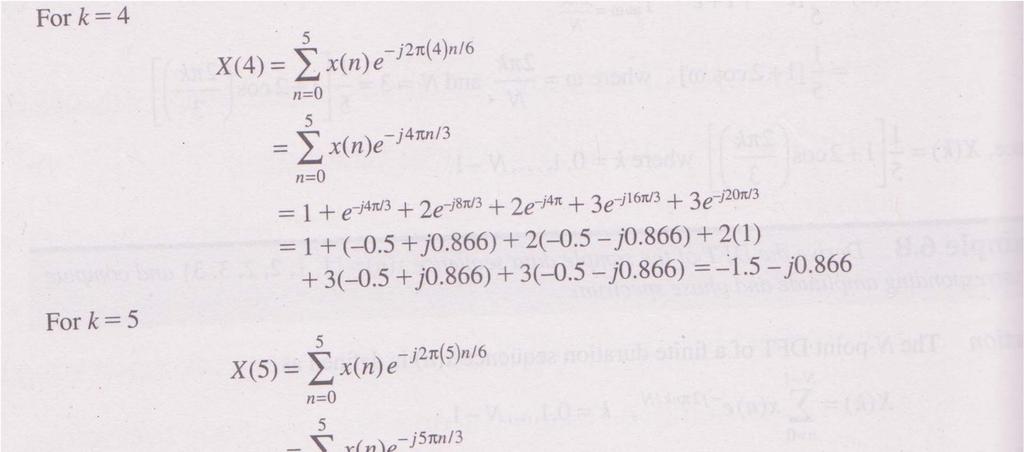
37 Example Derive the DFT of the sample data sequence data sequence x(n)={1,1,2,2,3,3} and compute the corresponding amplitude and phase spectrum.
38 Solution
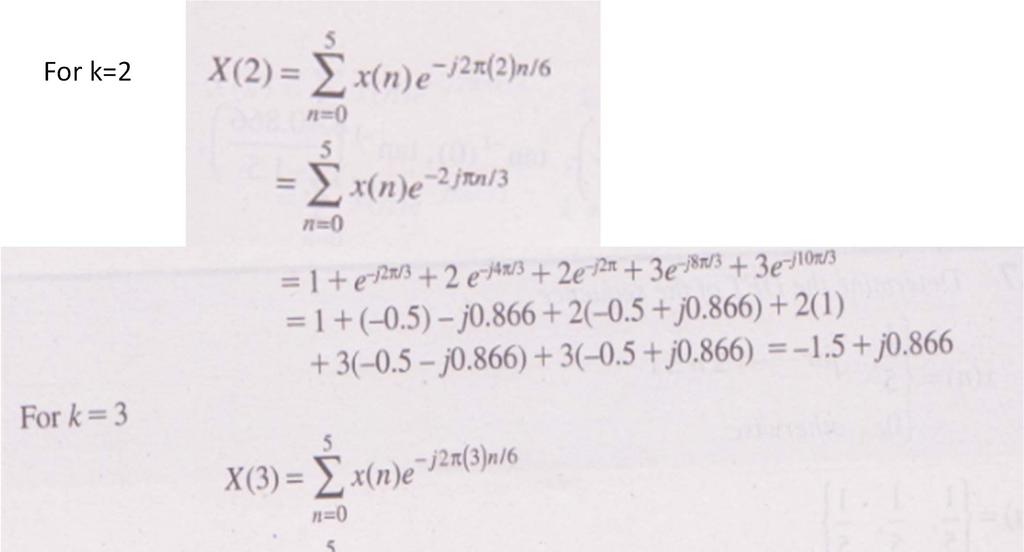

39 For k=2
40
41 Properties of DFT 1. Periodicity 2. Linearity 3. Shifting Property 4. Convolution Theorem 5. Time Reversal of a Sequence 6. Circular Time Shift 7. Circular Frequency Shift 8. Complex Conjugate Property 9. Circular convolution 10. Circular Correlation 11. Multiplication of Two Sequences 12. Parseval s Theorem
42 1. Periodicity Property If periodic N = 3 Periodicity Property If Positive part, N = period Negative part
43 2. Linearity Property If Suppose
44 3. Circular Time Shifting Property x(n+1) X( n) x(n 1) n 1 n = n= x(n) n = 1 shift 3 2 n = 2 2
45 4. Time /Frequency Shift Property
 4 1 3 2 then Period of signal")
46 5.Time reversal Property N = 4 X( n) then Period of signal n
47 8.Complex conjugate property If E.g.: If is a complex sequence c
48 9.Circular Convolution Property then Convolution time domain replicate c Multiplication in frequency domain Transform signal to Fourier domain and multiple both to get the convolution of two signal.
49 10.Correlation property Where is the (unnormalised) circular cross correlation sequence, given as c
50 11.Multiplication of two sequences c Multiplication in time domain is equivalent to circular convolution in frequency domain
51 12.Parsavel s Energy Theorem If y(n)= x(n), above equation reduces to Energy in the finite duration sequence x(n) to the power in frequency component X(k). c
52 CONVOLUTION
53 Convolution Linear Time Invariance h(n) Convolution symbol (not into) The above expression gives the response y(n) of the LTI system as a function of the input signal x(n) and impulse response h(n) is called the convolution sum.
54 Convolution Steps involved in finding out the convolution sum: 1. Folding: Fold the signal h(k) about the origin, ie at k=0; 2. Shifting: Shift h( k) to the right by no, if no is positive or shift h( k) to the left by no, if no is negative to obtain h(no k). 3. Multiplication: Multiply x(k) by h(no k) to obtain the product sequence y(k) = x(k) h(n k) 4. Summation: Sum all the values of the product sequence y(k) to obtain the value of the output at time n = no In general, if the lengths of the two sequences being convolved are M and N, then the resulting sequence after convolution is of length M + N 1.
55 Type of Convolution Convolution Linear Circular Aperiodic Signals Periodic Signal x(n) n
56 Linear Convolution x(n) = { } h(n) = { } y(n) =? Given signal are aperiodic We will use linear convolution LTI h(n)
57 x(n) = { } n = 0, 1, 2, 3 h(n) = { } When n = 0,
58 h( k) is a mirror image signal h(k) k Mirror the signal at h(k) axis h( k) k
59 n = 0 x(k) = { } n = 0 h( k) = { }
60 Graphical Method When n = 0 Step 1: Plot x(n) = { } Step 2: Plot h(n) = { } x(n) h(n) n n Step 3: Plot h( n) = { } 2 3 h(n) n
61
62 When n = 1 Mirror Signal n = 1 Delaying of Signal Shift right NOTE: +n Delaying of Signal Shift right n Advance of signal Shift left
63 When n = 1 Step 1: Plot x(n) = { } x(n) h( n) n Step 2: Plot h( n) = { } n h( n+1) Step 3: Plot h( n+1) = { } n
64 When n = 2 Mirror Signal n = 2 Delaying of Signal Shift right
65 When n = 2 Step 1: Plot x(n) = { } x(n) n h( n+1) Step 2: Plot h( n+1) = { } h( n+2) n Step 3: Plot h( n+2) = { } n
66 When n = 3 Mirror Signal n = 3 Delaying of Signal Shift right
67 When n = 3 Step 1: Plot x(n) = { } x(n) n h( n+2) Step 2: Plot h( n+2) = { } h( n+3) n Step 3: Plot h( n+3) = { } n ??
68 Conclude: samples Denoted by N is a number of samples No. of Samples in x(n) No. of Samples in h(n) Just now example N = = 7
69 ,,,,,, Conclude: Linear convolution Aperiodic Signal sample in the output signal Instead drawing the signal again and again, Another method is used
70 Tabular Method x(n) h(n) , 23, 26, 29, 18, 8} n =
71 Circular Convolution 1. Using for Periodic Signals 2. Both the signals x(n) and h(n) must be same length Conclusion: The period of x(n) and h(n) must be the same then only can performed circular convolution
72 Example Circular Convolution Question: Given two periodic signal of x(n) and h(n) as represent as following: x(n) = { } ; N = 4 h(n) = { } ; N = 4
73 x(n) = { } ; N=4 h(n) = { } ; N=4 Periodic Signals repeat after the fundamental period N=4. Periodic signals are infinite length signals.... x(n) n h(n) n h( n+3)
74 x(1) = 4 x(2) = 3 x(0) = 1 x(3) = 4 Y(n) output sequence N samples
75 Example Circular Convolution Question Given input sequence and impulse response, both signal sequences are periodic, Find the response output of the system using circular convolution.
76 Solution N = 4 System h(n) = {1234}; N=4 Step to do circular convolution: 1. Mirroring the signal 2. Multiplication of signal 3. Adding of signals 4. Shifting of signals
77 Step 0: Draw x(n) and h(n) Both N = 4, so divided the circle into 4 equal parts Placement of component is Anti counter wise direction. x(1) = 1 h(1) = 2 x(2) = 2 x(n) x(0) = 1 h(2) = 3 h(n) h(0) = 1 x(3) = 2 h(3) = 4
78 Step 2 mirroring the h(n) After mirroring anti clockwise become clockwise in sequence. h(2) = 3 h(1) = 2 h(n) Mirror at this line h(0) = 1 h(2) = 3 h(3) = 4 h( n) h(0) = 1 h(3) = 4 h(1) = 2
79 Step 2: Multiplication of signal Step 3: Adding of signals 4 x(1) = 1 6 x(n)h( n) x(0)h(0) = 1 x(2) = 2 h(3) = 4 h(2) = 3 h( n) x(0) = 1 h(0) = 1 h(1) = 2 x(3) = 2 X(1)h( 1) = 4 Product sequence, y
80 Step 4: Shifting Signal h(3) = 4 h(0) = 1 h(2) = 3 h( n) h(0) = 1 h(3) = 4 h( n+1) h(1) = 2 h(1) = 2 h(2) = 3
81 Step 2: Multiple of signal Step 3: Adding of signals 4 x(1) = 1 h(0) = 1 6 x(n)h( n) x(0)h(0) = 1 x(2) = 2 h(4) = 4 h( n+1) h(1) = 2 x(0) = 1 X(1)h( 1) = 4 Product sequence, y0 h(2) = 3 x(3) =
82 Step 4: Shifting Signal h(0) = 1 h(1) = 2 h(3) = 4 h( n+1) h(1) = 2 h(0) = 1 h( n+2) h(2) = 3 h(2) = 3 h(3) = 4
83 Step 2: Multiple of signal Step 3: Adding of signals 2 x(1) = 1 h(1) = 2 2 x(n)h( n) x(2)h(0) = 3 x(2) = 2 h(0) = 1 h( n+2) h(2) = 3 x(0) = 1 8 Product sequence, y0 h(3) = 4 x(3) =
84 Step 4: Shifting Signal h(1) = 2 h(2) = 3 h(0) = 1 h( n+2) h(2) = 3 h(1) = 2 h( n+3) h(3) = 4 h(3) = 4 h(0) = 1
85 Step 2: Multiple of signal Step 3: Adding of signals x(1) = x(n)h( n) x(0)h(3) = 4 h(2) = 3 x(2) = 2 h(1) = 2 h( n+3) h(0) = 1 x(3) = 2 h(3) = 4 x(0) = 1 Answer: y(n)={15,17,15,13} at N=4 2 Product sequence, y

86 Matrix Multiplication Method
87 Matrix Multiplication Method

88 Solution Example
89
90
Module 3. Convolution. Aim
 Module Convolution Digital Signal Processing. Slide 4. Aim How to perform convolution in real-time systems efficiently? Is convolution in time domain equivalent to multiplication of the transformed sequence?
Module Convolution Digital Signal Processing. Slide 4. Aim How to perform convolution in real-time systems efficiently? Is convolution in time domain equivalent to multiplication of the transformed sequence?
Ch.11 The Discrete-Time Fourier Transform (DTFT)
") EE2S11 Signals and Systems, part 2 Ch.11 The Discrete-Time Fourier Transform (DTFT Contents definition of the DTFT relation to the -transform, region of convergence, stability frequency plots convolution
EE2S11 Signals and Systems, part 2 Ch.11 The Discrete-Time Fourier Transform (DTFT Contents definition of the DTFT relation to the -transform, region of convergence, stability frequency plots convolution
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE)
") QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
Digital Signal Processing Lecture 4
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Digital Signal Processing Lecture 3 - Discrete-Time Systems
 Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
EEO 401 Digital Signal Processing Prof. Mark Fowler
 EEO 401 Digital Signal Processing Prof. Mark Fowler Note Set #21 Using the DFT to Implement FIR Filters Reading Assignment: Sect. 7.3 of Proakis & Manolakis Motivation: DTFT View of Filtering There are
EEO 401 Digital Signal Processing Prof. Mark Fowler Note Set #21 Using the DFT to Implement FIR Filters Reading Assignment: Sect. 7.3 of Proakis & Manolakis Motivation: DTFT View of Filtering There are
Chap 2. Discrete-Time Signals and Systems
 Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
DFT-Based FIR Filtering. See Porat s Book: 4.7, 5.6
 DFT-Based FIR Filtering See Porat s Book: 4.7, 5.6 1 Motivation: DTFT View of Filtering There are two views of filtering: * Time Domain * Frequency Domain x[ X f ( θ ) h[ H f ( θ ) Y y[ = h[ * x[ f ( θ
DFT-Based FIR Filtering See Porat s Book: 4.7, 5.6 1 Motivation: DTFT View of Filtering There are two views of filtering: * Time Domain * Frequency Domain x[ X f ( θ ) h[ H f ( θ ) Y y[ = h[ * x[ f ( θ
! Circular Convolution. " Linear convolution with circular convolution. ! Discrete Fourier Transform. " Linear convolution through circular
 Previously ESE 531: Digital Signal Processing Lec 22: April 18, 2017 Fast Fourier Transform (con t)! Circular Convolution " Linear convolution with circular convolution! Discrete Fourier Transform " Linear
Previously ESE 531: Digital Signal Processing Lec 22: April 18, 2017 Fast Fourier Transform (con t)! Circular Convolution " Linear convolution with circular convolution! Discrete Fourier Transform " Linear
Frequency-Domain C/S of LTI Systems
 Frequency-Domain C/S of LTI Systems x(n) LTI y(n) LTI: Linear Time-Invariant system h(n), the impulse response of an LTI systems describes the time domain c/s. H(ω), the frequency response describes the
Frequency-Domain C/S of LTI Systems x(n) LTI y(n) LTI: Linear Time-Invariant system h(n), the impulse response of an LTI systems describes the time domain c/s. H(ω), the frequency response describes the
The Continuous-time Fourier
 The Continuous-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals:
The Continuous-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals:
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture 1: Course Overview; Discrete-Time Signals & Systems Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 2008 K. E.
ELEG 305: Digital Signal Processing Lecture 1: Course Overview; Discrete-Time Signals & Systems Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 2008 K. E.
 DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
The Discrete-time Fourier Transform
 The Discrete-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals: The
The Discrete-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals: The
/ (2π) X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by
 X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by") Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Interchange of Filtering and Downsampling/Upsampling
 Interchange of Filtering and Downsampling/Upsampling Downsampling and upsampling are linear systems, but not LTI systems. They cannot be implemented by difference equations, and so we cannot apply z-transform
Interchange of Filtering and Downsampling/Upsampling Downsampling and upsampling are linear systems, but not LTI systems. They cannot be implemented by difference equations, and so we cannot apply z-transform
Flash File. Module 3 : Sampling and Reconstruction Lecture 28 : Discrete time Fourier transform and its Properties. Objectives: Scope of this Lecture:
 Module 3 : Sampling and Reconstruction Lecture 28 : Discrete time Fourier transform and its Properties Objectives: Scope of this Lecture: In the previous lecture we defined digital signal processing and
Module 3 : Sampling and Reconstruction Lecture 28 : Discrete time Fourier transform and its Properties Objectives: Scope of this Lecture: In the previous lecture we defined digital signal processing and
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A
 DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
EE-210. Signals and Systems Homework 7 Solutions
 EE-20. Signals and Systems Homework 7 Solutions Spring 200 Exercise Due Date th May. Problems Q Let H be the causal system described by the difference equation w[n] = 7 w[n ] 2 2 w[n 2] + x[n ] x[n 2]
EE-20. Signals and Systems Homework 7 Solutions Spring 200 Exercise Due Date th May. Problems Q Let H be the causal system described by the difference equation w[n] = 7 w[n ] 2 2 w[n 2] + x[n ] x[n 2]
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches
 How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
VU Signal and Image Processing. Torsten Möller + Hrvoje Bogunović + Raphael Sahann
 052600 VU Signal and Image Processing Torsten Möller + Hrvoje Bogunović + Raphael Sahann torsten.moeller@univie.ac.at hrvoje.bogunovic@meduniwien.ac.at raphael.sahann@univie.ac.at vda.cs.univie.ac.at/teaching/sip/17s/
052600 VU Signal and Image Processing Torsten Möller + Hrvoje Bogunović + Raphael Sahann torsten.moeller@univie.ac.at hrvoje.bogunovic@meduniwien.ac.at raphael.sahann@univie.ac.at vda.cs.univie.ac.at/teaching/sip/17s/
University Question Paper Solution
 Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 5 based on slides by J.M. Kahn Info Last time Finished DTFT Ch. 2 z-transforms Ch. 3 Today: DFT Ch. 8 Reminders: HW Due tonight The effects of sampling What is going
EE123 Digital Signal Processing Lecture 5 based on slides by J.M. Kahn Info Last time Finished DTFT Ch. 2 z-transforms Ch. 3 Today: DFT Ch. 8 Reminders: HW Due tonight The effects of sampling What is going
SIGNALS AND SYSTEMS. Unit IV. Analysis of DT signals
 SIGNALS AND SYSTEMS Unit IV Analysis of DT signals Contents: 4.1 Discrete Time Fourier Transform 4.2 Discrete Fourier Transform 4.3 Z Transform 4.4 Properties of Z Transform 4.5 Relationship between Z
SIGNALS AND SYSTEMS Unit IV Analysis of DT signals Contents: 4.1 Discrete Time Fourier Transform 4.2 Discrete Fourier Transform 4.3 Z Transform 4.4 Properties of Z Transform 4.5 Relationship between Z
Discrete Fourier transform (DFT)
") Discrete Fourier transform (DFT) Signal Processing 2008/9 LEA Instituto Superior Técnico Signal Processing LEA (IST) Discrete Fourier transform 1 / 34 Periodic signals Consider a periodic signal x[n] with
Discrete Fourier transform (DFT) Signal Processing 2008/9 LEA Instituto Superior Técnico Signal Processing LEA (IST) Discrete Fourier transform 1 / 34 Periodic signals Consider a periodic signal x[n] with
MAHALAKSHMI ENGINEERING COLLEGE-TRICHY
 DIGITAL SIGNAL PROCESSING DEPT./SEM.: ECE&EEE /V DISCRETE FOURIER TRANFORM AND FFT PART-A 1. Define DFT of a discrete time sequence? AUC MAY 06 The DFT is used to convert a finite discrete time sequence
DIGITAL SIGNAL PROCESSING DEPT./SEM.: ECE&EEE /V DISCRETE FOURIER TRANFORM AND FFT PART-A 1. Define DFT of a discrete time sequence? AUC MAY 06 The DFT is used to convert a finite discrete time sequence
Let H(z) = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )
 = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )") Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Discrete-time Signals and Systems in
 Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
Theory and Problems of Signals and Systems
 SCHAUM'S OUTLINES OF Theory and Problems of Signals and Systems HWEI P. HSU is Professor of Electrical Engineering at Fairleigh Dickinson University. He received his B.S. from National Taiwan University
SCHAUM'S OUTLINES OF Theory and Problems of Signals and Systems HWEI P. HSU is Professor of Electrical Engineering at Fairleigh Dickinson University. He received his B.S. from National Taiwan University
Lecture 11 FIR Filters
 Lecture 11 FIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/4/12 1 The Unit Impulse Sequence Any sequence can be represented in this way. The equation is true if k ranges
Lecture 11 FIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/4/12 1 The Unit Impulse Sequence Any sequence can be represented in this way. The equation is true if k ranges
EE 224 Signals and Systems I Review 1/10
 EE 224 Signals and Systems I Review 1/10 Class Contents Signals and Systems Continuous-Time and Discrete-Time Time-Domain and Frequency Domain (all these dimensions are tightly coupled) SIGNALS SYSTEMS
EE 224 Signals and Systems I Review 1/10 Class Contents Signals and Systems Continuous-Time and Discrete-Time Time-Domain and Frequency Domain (all these dimensions are tightly coupled) SIGNALS SYSTEMS
Discrete Time Signals and Systems Time-frequency Analysis. Gloria Menegaz
 Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
Discrete Fourier Transform
 Discrete Fourier Transform Virtually all practical signals have finite length (e.g., sensor data, audio records, digital images, stock values, etc). Rather than considering such signals to be zero-padded
Discrete Fourier Transform Virtually all practical signals have finite length (e.g., sensor data, audio records, digital images, stock values, etc). Rather than considering such signals to be zero-padded
HST.582J / 6.555J / J Biomedical Signal and Image Processing Spring 2007
 MIT OpenCourseare http://ocw.mit.edu HST.58J / 6.555J / 16.56J Biomedical Signal and Image Processing Spring 7 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
MIT OpenCourseare http://ocw.mit.edu HST.58J / 6.555J / 16.56J Biomedical Signal and Image Processing Spring 7 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
Question Paper Code : AEC11T02
 Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Z-Transform. x (n) Sampler
 Sampler") Chapter Two A- Discrete Time Signals: The discrete time signal x(n) is obtained by taking samples of the analog signal xa (t) every Ts seconds as shown in Figure below. Analog signal Discrete time signal
Chapter Two A- Discrete Time Signals: The discrete time signal x(n) is obtained by taking samples of the analog signal xa (t) every Ts seconds as shown in Figure below. Analog signal Discrete time signal
Solution 7 August 2015 ECE301 Signals and Systems: Final Exam. Cover Sheet
 Solution 7 August 2015 ECE301 Signals and Systems: Final Exam Cover Sheet Test Duration: 120 minutes Coverage: Chap. 1, 2, 3, 4, 5, 7 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes
Solution 7 August 2015 ECE301 Signals and Systems: Final Exam Cover Sheet Test Duration: 120 minutes Coverage: Chap. 1, 2, 3, 4, 5, 7 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes
Chapter 7: The z-transform
 Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
Aspects of Continuous- and Discrete-Time Signals and Systems
 Aspects of Continuous- and Discrete-Time Signals and Systems C.S. Ramalingam Department of Electrical Engineering IIT Madras C.S. Ramalingam (EE Dept., IIT Madras) Networks and Systems 1 / 45 Scaling the
Aspects of Continuous- and Discrete-Time Signals and Systems C.S. Ramalingam Department of Electrical Engineering IIT Madras C.S. Ramalingam (EE Dept., IIT Madras) Networks and Systems 1 / 45 Scaling the
E : Lecture 1 Introduction
 E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
EE301 Signals and Systems In-Class Exam Exam 3 Thursday, Apr. 20, Cover Sheet
 NAME: NAME EE301 Signals and Systems In-Class Exam Exam 3 Thursday, Apr. 20, 2017 Cover Sheet Test Duration: 75 minutes. Coverage: Chaps. 5,7 Open Book but Closed Notes. One 8.5 in. x 11 in. crib sheet
NAME: NAME EE301 Signals and Systems In-Class Exam Exam 3 Thursday, Apr. 20, 2017 Cover Sheet Test Duration: 75 minutes. Coverage: Chaps. 5,7 Open Book but Closed Notes. One 8.5 in. x 11 in. crib sheet
Lecture 19 IIR Filters
 Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Digital Signal Processing Chapter 10. Fourier Analysis of Discrete- Time Signals and Systems CHI. CES Engineering. Prof. Yasser Mostafa Kadah
 Digital Signal Processing Chapter 10 Fourier Analysis of Discrete- Time Signals and Systems Prof. Yasser Mostafa Kadah CHI CES Engineering Discrete-Time Fourier Transform Sampled time domain signal has
Digital Signal Processing Chapter 10 Fourier Analysis of Discrete- Time Signals and Systems Prof. Yasser Mostafa Kadah CHI CES Engineering Discrete-Time Fourier Transform Sampled time domain signal has
Chapter 8 The Discrete Fourier Transform
 Chapter 8 The Discrete Fourier Transform Introduction Representation of periodic sequences: the discrete Fourier series Properties of the DFS The Fourier transform of periodic signals Sampling the Fourier
Chapter 8 The Discrete Fourier Transform Introduction Representation of periodic sequences: the discrete Fourier series Properties of the DFS The Fourier transform of periodic signals Sampling the Fourier
8 The Discrete Fourier Transform (DFT)
") 8 The Discrete Fourier Transform (DFT) ² Discrete-Time Fourier Transform and Z-transform are de ned over in niteduration sequence. Both transforms are functions of continuous variables (ω and z). For nite-duration
8 The Discrete Fourier Transform (DFT) ² Discrete-Time Fourier Transform and Z-transform are de ned over in niteduration sequence. Both transforms are functions of continuous variables (ω and z). For nite-duration
ECE538 Final Exam Fall 2017 Digital Signal Processing I 14 December Cover Sheet
 ECE58 Final Exam Fall 7 Digital Signal Processing I December 7 Cover Sheet Test Duration: hours. Open Book but Closed Notes. Three double-sided 8.5 x crib sheets allowed This test contains five problems.
ECE58 Final Exam Fall 7 Digital Signal Processing I December 7 Cover Sheet Test Duration: hours. Open Book but Closed Notes. Three double-sided 8.5 x crib sheets allowed This test contains five problems.
ENSC327 Communications Systems 2: Fourier Representations. Jie Liang School of Engineering Science Simon Fraser University
 ENSC327 Communications Systems 2: Fourier Representations Jie Liang School of Engineering Science Simon Fraser University 1 Outline Chap 2.1 2.5: Signal Classifications Fourier Transform Dirac Delta Function
ENSC327 Communications Systems 2: Fourier Representations Jie Liang School of Engineering Science Simon Fraser University 1 Outline Chap 2.1 2.5: Signal Classifications Fourier Transform Dirac Delta Function
Discrete-Time Fourier Transform
 Discrete-Time Fourier Transform Chapter Intended Learning Outcomes: (i) (ii) (iii) Represent discrete-time signals using discrete-time Fourier transform Understand the properties of discrete-time Fourier
Discrete-Time Fourier Transform Chapter Intended Learning Outcomes: (i) (ii) (iii) Represent discrete-time signals using discrete-time Fourier transform Understand the properties of discrete-time Fourier
DISCRETE FOURIER TRANSFORM
 DISCRETE FOURIER TRANSFORM 1. Introduction The sampled discrete-time fourier transform (DTFT) of a finite length, discrete-time signal is known as the discrete Fourier transform (DFT). The DFT contains
DISCRETE FOURIER TRANSFORM 1. Introduction The sampled discrete-time fourier transform (DTFT) of a finite length, discrete-time signal is known as the discrete Fourier transform (DFT). The DFT contains
Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section The (DT) Fourier transform (or spectrum) of x[n] is
![Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section The (DT) Fourier transform (or spectrum) of x[n] is](/thumbs/89/98498368.jpg "Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section The (DT) Fourier transform (or spectrum) of x[n] is") Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section 5. 3 The (DT) Fourier transform (or spectrum) of x[n] is X ( e jω) = n= x[n]e jωn x[n] can be reconstructed from its
Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section 5. 3 The (DT) Fourier transform (or spectrum) of x[n] is X ( e jω) = n= x[n]e jωn x[n] can be reconstructed from its
Digital Signal Processing. Midterm 2 Solutions
 EE 123 University of California, Berkeley Anant Sahai arch 15, 2007 Digital Signal Processing Instructions idterm 2 Solutions Total time allowed for the exam is 80 minutes Please write your name and SID
EE 123 University of California, Berkeley Anant Sahai arch 15, 2007 Digital Signal Processing Instructions idterm 2 Solutions Total time allowed for the exam is 80 minutes Please write your name and SID
Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals
 Understanding the relationship between transform and the Fourier transform for discrete-time signals") z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
Computer Engineering 4TL4: Digital Signal Processing
 Computer Engineering 4TL4: Digital Signal Processing Day Class Instructor: Dr. I. C. BRUCE Duration of Examination: 3 Hours McMaster University Final Examination December, 2003 This examination paper includes
Computer Engineering 4TL4: Digital Signal Processing Day Class Instructor: Dr. I. C. BRUCE Duration of Examination: 3 Hours McMaster University Final Examination December, 2003 This examination paper includes
Final Exam ECE301 Signals and Systems Friday, May 3, Cover Sheet
 Name: Final Exam ECE3 Signals and Systems Friday, May 3, 3 Cover Sheet Write your name on this page and every page to be safe. Test Duration: minutes. Coverage: Comprehensive Open Book but Closed Notes.
Name: Final Exam ECE3 Signals and Systems Friday, May 3, 3 Cover Sheet Write your name on this page and every page to be safe. Test Duration: minutes. Coverage: Comprehensive Open Book but Closed Notes.
UNIT-II Z-TRANSFORM. This expression is also called a one sided z-transform. This non causal sequence produces positive powers of z in X (z).
.") Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
Review of Discrete-Time System
 Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Properties of LTI Systems
 Properties of LTI Systems Properties of Continuous Time LTI Systems Systems with or without memory: A system is memory less if its output at any time depends only on the value of the input at that same
Properties of LTI Systems Properties of Continuous Time LTI Systems Systems with or without memory: A system is memory less if its output at any time depends only on the value of the input at that same
VALLIAMMAI ENGINEERING COLLEGE. SRM Nagar, Kattankulathur DEPARTMENT OF INFORMATION TECHNOLOGY. Academic Year
 VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur- 603 203 DEPARTMENT OF INFORMATION TECHNOLOGY Academic Year 2016-2017 QUESTION BANK-ODD SEMESTER NAME OF THE SUBJECT SUBJECT CODE SEMESTER YEAR
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur- 603 203 DEPARTMENT OF INFORMATION TECHNOLOGY Academic Year 2016-2017 QUESTION BANK-ODD SEMESTER NAME OF THE SUBJECT SUBJECT CODE SEMESTER YEAR
IT DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A
 UNIT-1 SIGNALS AND SYSTEMS PART-A") DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING IT6502 - DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A 1. What is a continuous and discrete time signal? Continuous
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING IT6502 - DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A 1. What is a continuous and discrete time signal? Continuous
Analog vs. discrete signals
 Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Discrete-Time Signals & Systems
 Chapter 2 Discrete-Time Signals & Systems 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 2-1-1 Discrete-Time Signals: Time-Domain Representation (1/10) Signals
Chapter 2 Discrete-Time Signals & Systems 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 2-1-1 Discrete-Time Signals: Time-Domain Representation (1/10) Signals
The Discrete-Time Fourier
 Chapter 3 The Discrete-Time Fourier Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 3-1-1 Continuous-Time Fourier Transform Definition The CTFT of
Chapter 3 The Discrete-Time Fourier Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 3-1-1 Continuous-Time Fourier Transform Definition The CTFT of
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 30, 2018 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 30, 2018 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 22: April 10, 2018 Adaptive Filters Penn ESE 531 Spring 2018 Khanna Lecture Outline! Circular convolution as linear convolution with aliasing! Adaptive Filters Penn
ESE 531: Digital Signal Processing Lec 22: April 10, 2018 Adaptive Filters Penn ESE 531 Spring 2018 Khanna Lecture Outline! Circular convolution as linear convolution with aliasing! Adaptive Filters Penn
Linear Convolution Using FFT
 Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
Signals & Systems Handout #4
 Signals & Systems Handout #4 H-4. Elementary Discrete-Domain Functions (Sequences): Discrete-domain functions are defined for n Z. H-4.. Sequence Notation: We use the following notation to indicate the
Signals & Systems Handout #4 H-4. Elementary Discrete-Domain Functions (Sequences): Discrete-domain functions are defined for n Z. H-4.. Sequence Notation: We use the following notation to indicate the
(i) Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform
 Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform") z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
A system that is both linear and time-invariant is called linear time-invariant (LTI).
.") The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
Discrete-time signals and systems
 Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
GATE EE Topic wise Questions SIGNALS & SYSTEMS
 www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
Continuous and Discrete Time Signals and Systems
 Continuous and Discrete Time Signals and Systems Mrinal Mandal University of Alberta, Edmonton, Canada and Amir Asif York University, Toronto, Canada CAMBRIDGE UNIVERSITY PRESS Contents Preface Parti Introduction
Continuous and Discrete Time Signals and Systems Mrinal Mandal University of Alberta, Edmonton, Canada and Amir Asif York University, Toronto, Canada CAMBRIDGE UNIVERSITY PRESS Contents Preface Parti Introduction
Detailed Solutions to Exercises
 Detailed Solutions to Exercises Digital Signal Processing Mikael Swartling Nedelko Grbic rev. 205 Department of Electrical and Information Technology Lund University Detailed solution to problem E3.4 A
Detailed Solutions to Exercises Digital Signal Processing Mikael Swartling Nedelko Grbic rev. 205 Department of Electrical and Information Technology Lund University Detailed solution to problem E3.4 A
Digital Signal Processing BEC505 Chapter 1: Introduction What is a Signal? Signals: The Mathematical Way What is Signal processing?
 Digital Signal Processing BEC505 Chapter 1: Introduction What is a Signal? Anything which carries information is a signal. e.g. human voice, chirping of birds, smoke signals, gestures (sign language),
Digital Signal Processing BEC505 Chapter 1: Introduction What is a Signal? Anything which carries information is a signal. e.g. human voice, chirping of birds, smoke signals, gestures (sign language),
Continuous Fourier transform of a Gaussian Function
 Continuous Fourier transform of a Gaussian Function Gaussian function: e t2 /(2σ 2 ) The CFT of a Gaussian function is also a Gaussian function (i.e., time domain is Gaussian, then the frequency domain
Continuous Fourier transform of a Gaussian Function Gaussian function: e t2 /(2σ 2 ) The CFT of a Gaussian function is also a Gaussian function (i.e., time domain is Gaussian, then the frequency domain
EE301 Signals and Systems In-Class Exam Exam 3 Thursday, Apr. 19, Cover Sheet
 EE301 Signals and Systems In-Class Exam Exam 3 Thursday, Apr. 19, 2012 Cover Sheet Test Duration: 75 minutes. Coverage: Chaps. 5,7 Open Book but Closed Notes. One 8.5 in. x 11 in. crib sheet Calculators
EE301 Signals and Systems In-Class Exam Exam 3 Thursday, Apr. 19, 2012 Cover Sheet Test Duration: 75 minutes. Coverage: Chaps. 5,7 Open Book but Closed Notes. One 8.5 in. x 11 in. crib sheet Calculators
Digital Signal Processing Lecture 10 - Discrete Fourier Transform
 Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
Review of Analog Signal Analysis
 Review of Analog Signal Analysis Chapter Intended Learning Outcomes: (i) Review of Fourier series which is used to analyze continuous-time periodic signals (ii) Review of Fourier transform which is used
Review of Analog Signal Analysis Chapter Intended Learning Outcomes: (i) Review of Fourier series which is used to analyze continuous-time periodic signals (ii) Review of Fourier transform which is used
Representing a Signal
 The Fourier Series Representing a Signal The convolution method for finding the response of a system to an excitation takes advantage of the linearity and timeinvariance of the system and represents the
The Fourier Series Representing a Signal The convolution method for finding the response of a system to an excitation takes advantage of the linearity and timeinvariance of the system and represents the
DIGITAL SIGNAL PROCESSING LECTURE 1
 DIGITAL SIGNAL PROCESSING LECTURE 1 Fall 2010 2K8-5 th Semester Tahir Muhammad tmuhammad_07@yahoo.com Content and Figures are from Discrete-Time Signal Processing, 2e by Oppenheim, Shafer, and Buck, 1999-2000
DIGITAL SIGNAL PROCESSING LECTURE 1 Fall 2010 2K8-5 th Semester Tahir Muhammad tmuhammad_07@yahoo.com Content and Figures are from Discrete-Time Signal Processing, 2e by Oppenheim, Shafer, and Buck, 1999-2000
3.2 Complex Sinusoids and Frequency Response of LTI Systems
 3. Introduction. A signal can be represented as a weighted superposition of complex sinusoids. x(t) or x[n]. LTI system: LTI System Output = A weighted superposition of the system response to each complex
3. Introduction. A signal can be represented as a weighted superposition of complex sinusoids. x(t) or x[n]. LTI system: LTI System Output = A weighted superposition of the system response to each complex
Digital Signal Processing Module 1 Analysis of Discrete time Linear Time - Invariant Systems
 Digital Signal Processing Module 1 Analysis of Discrete time Linear Time - Invariant Systems Objective: 1. To understand the representation of Discrete time signals 2. To analyze the causality and stability
Digital Signal Processing Module 1 Analysis of Discrete time Linear Time - Invariant Systems Objective: 1. To understand the representation of Discrete time signals 2. To analyze the causality and stability
CMPT 318: Lecture 5 Complex Exponentials, Spectrum Representation
 CMPT 318: Lecture 5 Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University January 23, 2006 1 Exponentials The exponential is
CMPT 318: Lecture 5 Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University January 23, 2006 1 Exponentials The exponential is
ECE 308 Discrete-Time Signals and Systems
 ECE 38-6 ECE 38 Discrete-Time Signals and Systems Z. Aliyazicioglu Electrical and Computer Engineering Department Cal Poly Pomona ECE 38-6 1 Intoduction Two basic methods for analyzing the response of
ECE 38-6 ECE 38 Discrete-Time Signals and Systems Z. Aliyazicioglu Electrical and Computer Engineering Department Cal Poly Pomona ECE 38-6 1 Intoduction Two basic methods for analyzing the response of
Solution 10 July 2015 ECE301 Signals and Systems: Midterm. Cover Sheet
 Solution 10 July 2015 ECE301 Signals and Systems: Midterm Cover Sheet Test Duration: 60 minutes Coverage: Chap. 1,2,3,4 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes are not allowed.
Solution 10 July 2015 ECE301 Signals and Systems: Midterm Cover Sheet Test Duration: 60 minutes Coverage: Chap. 1,2,3,4 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes are not allowed.
Lecture 10. Digital Signal Processing. Chapter 7. Discrete Fourier transform DFT. Mikael Swartling Nedelko Grbic Bengt Mandersson. rev.
 Lecture 10 Digital Signal Processing Chapter 7 Discrete Fourier transform DFT Mikael Swartling Nedelko Grbic Bengt Mandersson rev. 016 Department of Electrical and Information Technology Lund University
Lecture 10 Digital Signal Processing Chapter 7 Discrete Fourier transform DFT Mikael Swartling Nedelko Grbic Bengt Mandersson rev. 016 Department of Electrical and Information Technology Lund University
Discrete-Time Signals and Systems. The z-transform and Its Application. The Direct z-transform. Region of Convergence. Reference: Sections
 Discrete-Time Signals and Systems The z-transform and Its Application Dr. Deepa Kundur University of Toronto Reference: Sections 3. - 3.4 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Discrete-Time Signals and Systems The z-transform and Its Application Dr. Deepa Kundur University of Toronto Reference: Sections 3. - 3.4 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
ECE-314 Fall 2012 Review Questions for Midterm Examination II
 ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
Review of Fundamentals of Digital Signal Processing
 Chapter 2 Review of Fundamentals of Digital Signal Processing 2.1 (a) This system is not linear (the constant term makes it non linear) but is shift-invariant (b) This system is linear but not shift-invariant
Chapter 2 Review of Fundamentals of Digital Signal Processing 2.1 (a) This system is not linear (the constant term makes it non linear) but is shift-invariant (b) This system is linear but not shift-invariant
Introduction to DSP Time Domain Representation of Signals and Systems
 Introduction to DSP Time Domain Representation of Signals and Systems Dr. Waleed Al-Hanafy waleed alhanafy@yahoo.com Faculty of Electronic Engineering, Menoufia Univ., Egypt Digital Signal Processing (ECE407)
Introduction to DSP Time Domain Representation of Signals and Systems Dr. Waleed Al-Hanafy waleed alhanafy@yahoo.com Faculty of Electronic Engineering, Menoufia Univ., Egypt Digital Signal Processing (ECE407)
Fourier analysis of discrete-time signals. (Lathi Chapt. 10 and these slides)
") Fourier analysis of discrete-time signals (Lathi Chapt. 10 and these slides) Towards the discrete-time Fourier transform How we will get there? Periodic discrete-time signal representation by Discrete-time
Fourier analysis of discrete-time signals (Lathi Chapt. 10 and these slides) Towards the discrete-time Fourier transform How we will get there? Periodic discrete-time signal representation by Discrete-time
Frequency-domain representation of discrete-time signals
 4 Frequency-domain representation of discrete-time signals So far we have been looing at signals as a function of time or an index in time. Just lie continuous-time signals, we can view a time signal as
4 Frequency-domain representation of discrete-time signals So far we have been looing at signals as a function of time or an index in time. Just lie continuous-time signals, we can view a time signal as
EE 225D LECTURE ON DIGITAL FILTERS. University of California Berkeley
 University of California Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences Professors : N.Morgan / B.Gold EE225D Digital Filters Spring,1999 Lecture 7 N.MORGAN
University of California Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences Professors : N.Morgan / B.Gold EE225D Digital Filters Spring,1999 Lecture 7 N.MORGAN
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
Discrete-Time Fourier Transform (DTFT)
") Discrete-Time Fourier Transform (DTFT) 1 Preliminaries Definition: The Discrete-Time Fourier Transform (DTFT) of a signal x[n] is defined to be X(e jω ) x[n]e jωn. (1) In other words, the DTFT of x[n]
Discrete-Time Fourier Transform (DTFT) 1 Preliminaries Definition: The Discrete-Time Fourier Transform (DTFT) of a signal x[n] is defined to be X(e jω ) x[n]e jωn. (1) In other words, the DTFT of x[n]
! Introduction. ! Discrete Time Signals & Systems. ! Z-Transform. ! Inverse Z-Transform. ! Sampling of Continuous Time Signals
 ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
Definition. A signal is a sequence of numbers. sequence is also referred to as being in l 1 (Z), or just in l 1. A sequence {x(n)} satisfying
, or just in l 1. A sequence {x(n)} satisfying") Signals and Systems. Definition. A signal is a sequence of numbers {x(n)} n Z satisfying n Z x(n)
Signals and Systems. Definition. A signal is a sequence of numbers {x(n)} n Z satisfying n Z x(n)
信號與系統 Signals and Systems
 Spring 2013 Flowchart Introduction (Chap 1) LTI & Convolution (Chap 2) NTUEE-SS10-Z-2 信號與系統 Signals and Systems Chapter SS-10 The z-transform FS (Chap 3) Periodic Bounded/Convergent CT DT FT Aperiodic
Spring 2013 Flowchart Introduction (Chap 1) LTI & Convolution (Chap 2) NTUEE-SS10-Z-2 信號與系統 Signals and Systems Chapter SS-10 The z-transform FS (Chap 3) Periodic Bounded/Convergent CT DT FT Aperiodic
Very useful for designing and analyzing signal processing systems
 z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
Summary of lecture 1. E x = E x =T. X T (e i!t ) which motivates us to define the energy spectrum Φ xx (!) = jx (i!)j 2 Z 1 Z =T. 2 d!
 which motivates us to define the energy spectrum Φ xx (!) = jx (i!)j 2 Z 1 Z =T. 2 d!") Summary of lecture I Continuous time: FS X FS [n] for periodic signals, FT X (i!) for non-periodic signals. II Discrete time: DTFT X T (e i!t ) III Poisson s summation formula: describes the relationship
Summary of lecture I Continuous time: FS X FS [n] for periodic signals, FT X (i!) for non-periodic signals. II Discrete time: DTFT X T (e i!t ) III Poisson s summation formula: describes the relationship