Digital Signal Processing:
|
|
|
- Kathlyn Morrison
- 6 years ago
- Views:
Transcription

1 Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried by the signal. What is a signal? What is a system? What is processing? Applied Signal Processing - Lecture 1
2

3 μn 1 n 0 μn 0 n< 0
4
5 E = x n= x n 2
6
![m= h[n] =](/docs-images/78/78265577/images/7-0.jpg "h[n]*δ[n] = h[m].")
7 m= h[n] = h[n]*δ[n] = h[m]. δ[n m]
8
9
![N M ayn [ k] = bxn](/docs-images/78/78265577/images/10-0.jpg "[ k] i i= 0 i= 0 i")
10 N M ayn [ k] = bxn [ k] i i= 0 i= 0 i
11
12
13 j + k n jn j2kn 2 2 X + k = x n e = x n e e n= n= n= j n = x n e = X k
14
15 j 0 n xn=e ; X = + k 2 2 k= 0 X e j0n j0n ( ) X( e ) 2
16
17
18
19 spectrum of the continous signal spectrum of the sampled signal
20
![N 1 N 1 X[k ]= x[n]e 2](/docs-images/78/78265577/images/21-0.jpg "kn i/n = x[n]e ni k n=0")
21 N 1 N 1 X[k ]= x[n]e 2 kn i/n = x[n]e ni k n=0 n=0
![N 1 kn X[k ]=](/docs-images/78/78265577/images/22-0.jpg "x[n]w N n=0 0kN")
22 N 1 kn X[k ]= x[n]w N n=0 0kN 1
23
24
25 Circular Convolution Linear convolution: N 1 y [ n] g[ m] h[ nm] L m0 Circular convolution: N 1 yc[ n] g[ m] h[ nmn] m0 consider the following functions for a 4 point circular convolution
26 Circular Convolution Evaluating N 1 yc[ n] g[ m] h[ nmn] m0 gives: y [0] g[0] h[0] g[1] h[3] g[2] h[2] g[3] h[1] C y [1] g[0] h[1] g[1] h[0] g[2] h[3] g[3] h[2] C y [2] g[0] h[2] g[1] h[1] g[2] h[0] g[3] h[3] C y [3] g[0] h[3] g[1] h[2] g[2] h[1] g[3] h[0] C so we see that the 4 terms involve multiplying g[n] with reversed and circularly shifted versions of h[n] on the interval n = 0 3
27

28 Xz= x [n]z n n=
![n j n n jn X() z x[] n z](/docs-images/78/78265577/images/29-0.jpg "x[]( n re ) x[] n r e n n")
29 n j n n jn X() z x[] n z x[]( n re ) x[] n r e n n n
30

31 1 Xz= 1 z 1 for z 1 1
32
33 m1 m z m
34
35
36
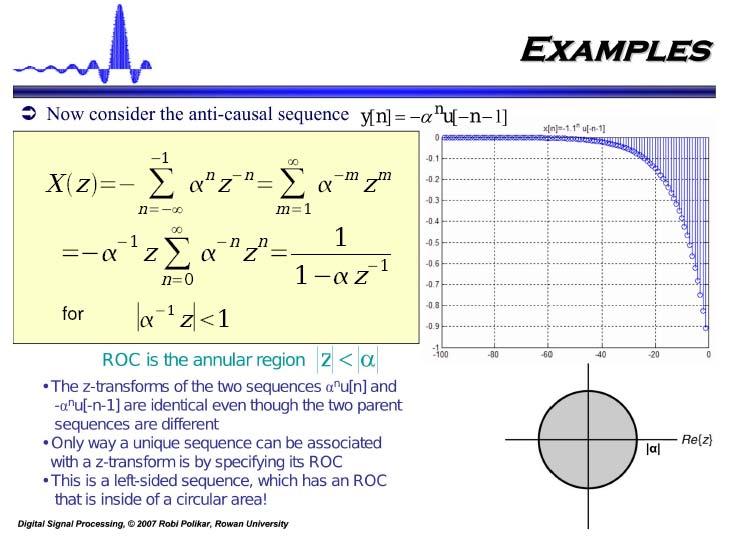
37 Stability & ROC In terms of Zeros & Poles Recall that for a system to be causal, its impulse response must satisfy h[n]=0, n<0, that is for a causal system, the impulse response is right sided. Based on this, and our previous observations, we can make the following important conclusions: The ROC of a causal system extends outside of the outermost pole circle The ROC of an anticausal system (whose h[n] is purely left-sided) lies inside of the innermost pole circle The ROC of a noncausal system (whose h[n] two-sided) is bounded by two different pole circles Now, for an LTI system to be stable it must be absolutely summable, or in other words, it must have a DTFT. But for a system to have a DTFT, its ROC must include the unit circle. An LTI system is stable, if and only if the ROC of its transfer function H(z) includes the unit circle! Furthermore, a causal system s ROC lies outside of a pole circle. If that system is also stable, its ROC must include unit circle Then a causal system is stable, if and only if, all poles are inside the unit circle! Similarly, an anticausal system is stable, if and only if its poles lie outside the unit circle. An FIR filter is always stable, why? Digital Signal Processing, 2010 Robi Polikar, Rowan University
38 Partial Fractional Expansion 1 1 Example 1: H( z) (1 z z ) (1 z )(1 z ) this can be written as: H( z) A A (1 ) (1 ) z 2 z z > 1/2 with: A 1 z 1 z 1; 2 (1 )(1 ) (1 )(1 ) A z 2 z z 4 z 2 z 1 2 so: H( z) (1 z ) (1 z ) 4 2 z h[n] is causal 1 n hn [ ] 2 [ n] [ n] n
39 Partial Fractional Expansion if M N a polynomial must be added of order M N : H( z) A dz MN N k i Bk z k0 i01 i 1 values of B k are obtained by long division of the numerator of H(z) by the denominator. in the case of multiple poles of order s at z = d i while all other poles are simple another term is required: H( z) MN N s k Ak Cm 1 1 dz Bk z 1 k0 k0, ki dz k m1 i 1 m
40
41 Partial Fractional Expansion Example 2: H( z) z 4z2 12 z z (1 z ) 2z 3z1 1 z z (1 z )(1 z ) As the numerator is the same order as the denominator we need to write H(z) as: H( z) A A B (1 ) (1 ) z z z > 1 we first need to determine B o and a residual expression with a lower order numerator by dividing the denominator into the numerator B (1 ) (1 ) z z 5z z 2 z 2 z 2 z
42 Partial Fractional Expansion the next step is to further solve the second term: 1 5z (1 2 z 2 z ) 1 5z 1 1 and solve for A 1 and A 1 2: A1 2 ( z ) 9 (1 2 z )(1 z ) z 1 A 1 5z (1 z ) (1 2 z )(1 z ) z1 9 8 so: H ( z ) 2 (1 1 ) (1 1 z z ) h[n] is causal 1 hn [ ] 2 [ n] 9 [ n] 8 [ n] 2 n
43
44
45 z M z M 1 M 1 [ ( z 1)]
46
47 Linear Phase Note that a zero-phase filter cannot be implemented for real-time applications. Why? Real time means causal operation. No time to reverse and refilter. For a causal transfer function with a nonzero phase response, the phase distortion can be avoided by ensuring that the transfer function has (preferably) a unity magnitude and a linear-phase characteristic in the frequency band of interest H j ( ) e H ( ) 1 H ( ) ( ) Note that this phase characteristic is linear for all in [0 2]. Recall that the phase delay at any given frequency 0 was If we have linear phase, that is, ()=-, then the total delay at any frequency 0 is 0 = -( 0 )/ 0 = - 0 / 0 = Note that this is identical to the group delay d()/d g evaluated at 0 p ( o ( ) d ( ) ( 0) d o o ) 0 Digital Signal Processing, 2007 Robi Polikar, Rowan University
48 Linear Phase Filters It is typically impossible to design a linear phase IIR filter, however, designing FIR filters with precise linear phase is very easy: Consider a causal FIR filter of length M+1 (order M) H ( z) N n0 n h[ n] z h[0] h[1] z h[2] z h[ M ] z 1 2 M This transfer function has linear phase, if its impulse response h[n] is either symmetric or anti-symmetric h[ n] h[ M n], 0 n M h[ n] h[ M n], 0 n M Digital Signal Processing, 2007 Robi Polikar, Rowan University
49 LINEAR PHASE FILTERS This linear phase filter description can be generalised into a formalism for four type of FIR filters: Type 1: symmetric sequence of odd length Type 2: symmetric sequence of even length Type 3: anti-symmetric sequence of odd length Type 4: anti-symmetric sequence of even length
50 Linear Phase Filter Zero Locations Type 1 FIR filter: Either an even number or no zeros at z = 1 and z=-1 Type 2 FIR filter: Either an even number or no zeros at z = 1, and an odd number of zeros at z=-1 Type 3 FIR filter: An odd number of zeros at z = 1 and and z=-1 Type 4 FIR filter: An odd number of zeros at z = 1, and either an even number or no zeros at z=-1 The presence of zeros at z=±1 leads to some limitations on the use of these linear-phase transfer functions for designing frequency-selective filters Type 1 Type Type 2 Type 4 Digital Signal Processing, 2010 Robi Polikar, Rowan University
51 A Type 2 FIR filter cannot be used to design a highpass filter since it always has a zero at z=-1 A Type 3 FIR filter has zeros at both z = 1 and z=-1, and hence cannot be used to design either a lowpass or a highpass or a bandstop filter A Type 4 FIR filter is not appropriate to design a lowpass filter due to the presence of a zero at z = 1 Type 1 FIR filter has no such restrictions and can be used to design almost any type of filter Digital Signal Processing, 2010 Robi Polikar, Rowan University
52
53
54
55
56
57
58
59
60 FIR or IIR??? Several advantages to both FIR and IIR type filters. Advantages of FIR filters (disadvantages of IIR filters): Can be designed with exact linear phase, Filter structure always stable with quantized coefficients The filter startup transients have finite duration Disadvantages of FIR filters (advantage of IIR filters) Order of an FIR filter is usually much higher than the order of an equivalent IIR filter meeting the same specifications higher computational complexity In fact, the ratio of orders of a typical IIR filter to that of an FIR filter is in the order of tens. The nonlinear phase of an IIR filter can be minimized using an appropriate allpass filter, however, by that time the computational advantage of IIR is lost. However, in most applications that does not require real-time operation, phase is not an issue. Why? A zero phase filter can be easily obtain through double-reverse processing (filtfilt) Digital Signal Processing, 2007 Robi Polikar, Rowan University
) M, 0 n M, n ( n M /2) 2 c")
61 WINDOWING: zero coefficients outside M/2 n M/2 and a shift to the right yields finite series with length M+1 h LP [ n] sin( c ( n M / 2)) M, 0 n M, n ( n M /2) 2 c M, n 2

62 h HP sin( cn), n 0 n [ n] c 1-, n 0
63 FIR BPF/BSF Design H BP (e j ) H LP (e j ) H LP (e j ) 1 1 = - 1 c2 c1 c1 c2 c 0 c c = c2 c 0 c c = c1 H BP ( ) H LP ( ) h c BP[ n] c2 H LP ( ) c c1 sin c n M / 2 2 n M / 2 c 2 c1 M, n 2 sin c 1 h BP n M [ n] h n M / 2 / 2 LP, [ n] c c2 h LP 0 n M, n [ n] M 2 c c1 Similarly, H BS ( ) 1 H ( ) h [ n] [ n] h [ n] BP Digital Signal Processing, 2007 Robi Polikar, Rowan University BS BP
64 However? What happened? Digital Signal Processing, 2007 Robi Polikar, Rowan University
65 Gibbs Phenomenon H d : Ideal filter frequency response : Rectangular window frequency response H t : Truncated filter s frequency response Digital Signal Processing, 2007 Robi Polikar, Rowan University
Responses of Digital Filters Chapter Intended Learning Outcomes:
 Responses of Digital Filters Chapter Intended Learning Outcomes: (i) Understanding the relationships between impulse response, frequency response, difference equation and transfer function in characterizing
Responses of Digital Filters Chapter Intended Learning Outcomes: (i) Understanding the relationships between impulse response, frequency response, difference equation and transfer function in characterizing
Stability Condition in Terms of the Pole Locations
 Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Digital Signal Processing
 COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
z-transform Chapter 6
 z-transform Chapter 6 Dr. Iyad djafar Outline 2 Definition Relation Between z-transform and DTFT Region of Convergence Common z-transform Pairs The Rational z-transform The Inverse z-transform z-transform
z-transform Chapter 6 Dr. Iyad djafar Outline 2 Definition Relation Between z-transform and DTFT Region of Convergence Common z-transform Pairs The Rational z-transform The Inverse z-transform z-transform
Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals
 Understanding the relationship between transform and the Fourier transform for discrete-time signals") z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
(i) Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform
 Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform") z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
Let H(z) = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )
 = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )") Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
EE123 Digital Signal Processing. M. Lustig, EECS UC Berkeley
 EE123 Digital Signal Processing Today Last time: DTFT - Ch 2 Today: Continue DTFT Z-Transform Ch. 3 Properties of the DTFT cont. Time-Freq Shifting/modulation: M. Lustig, EE123 UCB M. Lustig, EE123 UCB
EE123 Digital Signal Processing Today Last time: DTFT - Ch 2 Today: Continue DTFT Z-Transform Ch. 3 Properties of the DTFT cont. Time-Freq Shifting/modulation: M. Lustig, EE123 UCB M. Lustig, EE123 UCB
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A
 DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 30, 2018 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 30, 2018 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
Linear Convolution Using FFT
 Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
UNIVERSITY OF OSLO. Please make sure that your copy of the problem set is complete before you attempt to answer anything.
 UNIVERSITY OF OSLO Faculty of mathematics and natural sciences Examination in INF3470/4470 Digital signal processing Day of examination: December 9th, 011 Examination hours: 14.30 18.30 This problem set
UNIVERSITY OF OSLO Faculty of mathematics and natural sciences Examination in INF3470/4470 Digital signal processing Day of examination: December 9th, 011 Examination hours: 14.30 18.30 This problem set
UNIT-II Z-TRANSFORM. This expression is also called a one sided z-transform. This non causal sequence produces positive powers of z in X (z).
.") Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Lecture 19 IIR Filters
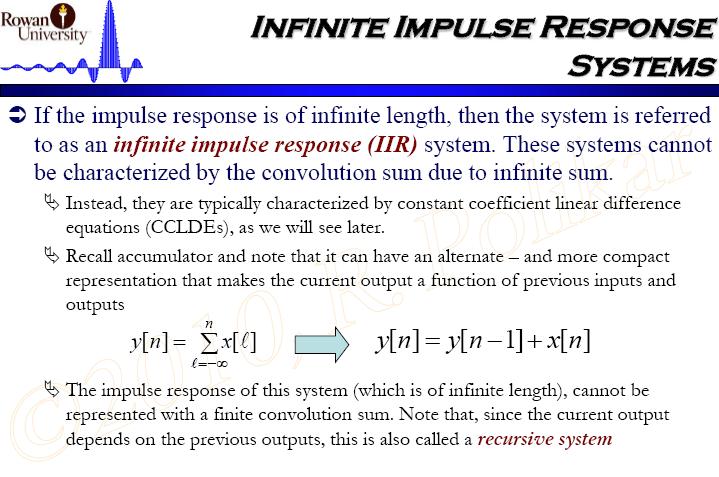
 Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Transform analysis of LTI systems Oppenheim and Schafer, Second edition pp For LTI systems we can write
 Transform analysis of LTI systems Oppenheim and Schafer, Second edition pp. 4 9. For LTI systems we can write yœn D xœn hœn D X kd xœkhœn Alternatively, this relationship can be expressed in the z-transform
Transform analysis of LTI systems Oppenheim and Schafer, Second edition pp. 4 9. For LTI systems we can write yœn D xœn hœn D X kd xœkhœn Alternatively, this relationship can be expressed in the z-transform
Digital Signal Processing Lecture 10 - Discrete Fourier Transform
 Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture : Design of Digital IIR Filters (Part I) Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner (Univ.
ELEG 305: Digital Signal Processing Lecture : Design of Digital IIR Filters (Part I) Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner (Univ.
Filter structures ELEC-E5410
 Filter structures ELEC-E5410 Contents FIR filter basics Ideal impulse responses Polyphase decomposition Fractional delay by polyphase structure Nyquist filters Half-band filters Gibbs phenomenon Discrete-time
Filter structures ELEC-E5410 Contents FIR filter basics Ideal impulse responses Polyphase decomposition Fractional delay by polyphase structure Nyquist filters Half-band filters Gibbs phenomenon Discrete-time
LINEAR-PHASE FIR FILTERS DESIGN
 LINEAR-PHASE FIR FILTERS DESIGN Prof. Siripong Potisuk inimum-phase Filters A digital filter is a minimum-phase filter if and only if all of its zeros lie inside or on the unit circle; otherwise, it is
LINEAR-PHASE FIR FILTERS DESIGN Prof. Siripong Potisuk inimum-phase Filters A digital filter is a minimum-phase filter if and only if all of its zeros lie inside or on the unit circle; otherwise, it is
Discrete Time Systems
 1 Discrete Time Systems {x[0], x[1], x[2], } H {y[0], y[1], y[2], } Example: y[n] = 2x[n] + 3x[n-1] + 4x[n-2] 2 FIR and IIR Systems FIR: Finite Impulse Response -- non-recursive y[n] = 2x[n] + 3x[n-1]
1 Discrete Time Systems {x[0], x[1], x[2], } H {y[0], y[1], y[2], } Example: y[n] = 2x[n] + 3x[n-1] + 4x[n-2] 2 FIR and IIR Systems FIR: Finite Impulse Response -- non-recursive y[n] = 2x[n] + 3x[n-1]
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture 4: Inverse z Transforms & z Domain Analysis Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner
ELEG 305: Digital Signal Processing Lecture 4: Inverse z Transforms & z Domain Analysis Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner
Review of Fundamentals of Digital Signal Processing
 Chapter 2 Review of Fundamentals of Digital Signal Processing 2.1 (a) This system is not linear (the constant term makes it non linear) but is shift-invariant (b) This system is linear but not shift-invariant
Chapter 2 Review of Fundamentals of Digital Signal Processing 2.1 (a) This system is not linear (the constant term makes it non linear) but is shift-invariant (b) This system is linear but not shift-invariant
ECE503: Digital Signal Processing Lecture 5
 ECE53: Digital Signal Processing Lecture 5 D. Richard Brown III WPI 3-February-22 WPI D. Richard Brown III 3-February-22 / 32 Lecture 5 Topics. Magnitude and phase characterization of transfer functions
ECE53: Digital Signal Processing Lecture 5 D. Richard Brown III WPI 3-February-22 WPI D. Richard Brown III 3-February-22 / 32 Lecture 5 Topics. Magnitude and phase characterization of transfer functions
Tunable IIR Digital Filters
 Tunable IIR Digital Filters We have described earlier two st-order and two nd-order IIR digital transfer functions with tunable frequency response characteristics We shall show now that these transfer
Tunable IIR Digital Filters We have described earlier two st-order and two nd-order IIR digital transfer functions with tunable frequency response characteristics We shall show now that these transfer
Z-Transform. 清大電機系林嘉文 Original PowerPoint slides prepared by S. K. Mitra 4-1-1
 Chapter 6 Z-Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 z-transform The DTFT provides a frequency-domain representation of discrete-time
Chapter 6 Z-Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 z-transform The DTFT provides a frequency-domain representation of discrete-time
Basic Design Approaches
 (Classic) IIR filter design: Basic Design Approaches. Convert the digital filter specifications into an analog prototype lowpass filter specifications. Determine the analog lowpass filter transfer function
(Classic) IIR filter design: Basic Design Approaches. Convert the digital filter specifications into an analog prototype lowpass filter specifications. Determine the analog lowpass filter transfer function
IT DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A
 UNIT-1 SIGNALS AND SYSTEMS PART-A") DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING IT6502 - DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A 1. What is a continuous and discrete time signal? Continuous
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING IT6502 - DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A 1. What is a continuous and discrete time signal? Continuous
Discrete-time Signals and Systems in
 Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
We have shown earlier that the 1st-order lowpass transfer function
 Tunable IIR Digital Filters We have described earlier two st-order and two nd-order IIR digital transfer functions with tunable frequency response characteristics We shall show now that these transfer
Tunable IIR Digital Filters We have described earlier two st-order and two nd-order IIR digital transfer functions with tunable frequency response characteristics We shall show now that these transfer
VALLIAMMAI ENGINEERING COLLEGE. SRM Nagar, Kattankulathur DEPARTMENT OF INFORMATION TECHNOLOGY. Academic Year
 VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur- 603 203 DEPARTMENT OF INFORMATION TECHNOLOGY Academic Year 2016-2017 QUESTION BANK-ODD SEMESTER NAME OF THE SUBJECT SUBJECT CODE SEMESTER YEAR
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur- 603 203 DEPARTMENT OF INFORMATION TECHNOLOGY Academic Year 2016-2017 QUESTION BANK-ODD SEMESTER NAME OF THE SUBJECT SUBJECT CODE SEMESTER YEAR
Use: Analysis of systems, simple convolution, shorthand for e jw, stability. Motivation easier to write. Or X(z) = Z {x(n)}
 = Z {x(n)}") 1 VI. Z Transform Ch 24 Use: Analysis of systems, simple convolution, shorthand for e jw, stability. A. Definition: X(z) = x(n) z z - transforms Motivation easier to write Or Note if X(z) = Z {x(n)} z
1 VI. Z Transform Ch 24 Use: Analysis of systems, simple convolution, shorthand for e jw, stability. A. Definition: X(z) = x(n) z z - transforms Motivation easier to write Or Note if X(z) = Z {x(n)} z
Computer Engineering 4TL4: Digital Signal Processing
 Computer Engineering 4TL4: Digital Signal Processing Day Class Instructor: Dr. I. C. BRUCE Duration of Examination: 3 Hours McMaster University Final Examination December, 2003 This examination paper includes
Computer Engineering 4TL4: Digital Signal Processing Day Class Instructor: Dr. I. C. BRUCE Duration of Examination: 3 Hours McMaster University Final Examination December, 2003 This examination paper includes
Transform Analysis of Linear Time-Invariant Systems
 Transform Analysis of Linear Time-Invariant Systems Discrete-Time Signal Processing Chia-Ping Chen Department of Computer Science and Engineering National Sun Yat-Sen University Kaohsiung, Taiwan ROC Transform
Transform Analysis of Linear Time-Invariant Systems Discrete-Time Signal Processing Chia-Ping Chen Department of Computer Science and Engineering National Sun Yat-Sen University Kaohsiung, Taiwan ROC Transform
! z-transform. " Tie up loose ends. " Regions of convergence properties. ! Inverse z-transform. " Inspection. " Partial fraction
 Lecture Outline ESE 53: Digital Signal Processing Lec 6: January 3, 207 Inverse z-transform! z-transform " Tie up loose ends " gions of convergence properties! Inverse z-transform " Inspection " Partial
Lecture Outline ESE 53: Digital Signal Processing Lec 6: January 3, 207 Inverse z-transform! z-transform " Tie up loose ends " gions of convergence properties! Inverse z-transform " Inspection " Partial
5.1 The Discrete Time Fourier Transform
 32 33 5 The Discrete Time ourier Transform ourier (or frequency domain) analysis the last Complete the introduction and the development of the methods of ourier analysis Learn frequency-domain methods
32 33 5 The Discrete Time ourier Transform ourier (or frequency domain) analysis the last Complete the introduction and the development of the methods of ourier analysis Learn frequency-domain methods
Discrete-Time Signals and Systems. The z-transform and Its Application. The Direct z-transform. Region of Convergence. Reference: Sections
 Discrete-Time Signals and Systems The z-transform and Its Application Dr. Deepa Kundur University of Toronto Reference: Sections 3. - 3.4 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Discrete-Time Signals and Systems The z-transform and Its Application Dr. Deepa Kundur University of Toronto Reference: Sections 3. - 3.4 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Lecture 2 OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE
 OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE EEE 43 DIGITAL SIGNAL PROCESSING (DSP) 2 DIFFERENCE EQUATIONS AND THE Z- TRANSFORM FALL 22 Yrd. Doç. Dr. Didem Kivanc Tureli didemk@ieee.org didem.kivanc@okan.edu.tr
OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE EEE 43 DIGITAL SIGNAL PROCESSING (DSP) 2 DIFFERENCE EQUATIONS AND THE Z- TRANSFORM FALL 22 Yrd. Doç. Dr. Didem Kivanc Tureli didemk@ieee.org didem.kivanc@okan.edu.tr
The Z-Transform. Fall 2012, EE123 Digital Signal Processing. Eigen Functions of LTI System. Eigen Functions of LTI System
 The Z-Transform Fall 202, EE2 Digital Signal Processing Lecture 4 September 4, 202 Used for: Analysis of LTI systems Solving di erence equations Determining system stability Finding frequency response
The Z-Transform Fall 202, EE2 Digital Signal Processing Lecture 4 September 4, 202 Used for: Analysis of LTI systems Solving di erence equations Determining system stability Finding frequency response
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches
 How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
The Z transform (2) 1
 1") The Z transform (2) 1 Today Properties of the region of convergence (3.2) Read examples 3.7, 3.8 Announcements: ELEC 310 FINAL EXAM: April 14 2010, 14:00 pm ECS 123 Assignment 2 due tomorrow by 4:00 pm
The Z transform (2) 1 Today Properties of the region of convergence (3.2) Read examples 3.7, 3.8 Announcements: ELEC 310 FINAL EXAM: April 14 2010, 14:00 pm ECS 123 Assignment 2 due tomorrow by 4:00 pm
The Z transform (2) Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 28 1
 Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 28 1") The Z transform (2) Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 28 1 Outline Properties of the region of convergence (10.2) The inverse Z-transform (10.3) Definition Computational techniques Alexandra
The Z transform (2) Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 28 1 Outline Properties of the region of convergence (10.2) The inverse Z-transform (10.3) Definition Computational techniques Alexandra
1. FIR Filter Design
 ELEN E4810: Digital Signal Processing Topic 9: Filter Design: FIR 1. Windowed Impulse Response 2. Window Shapes 3. Design by Iterative Optimization 1 1. FIR Filter Design! FIR filters! no poles (just zeros)!
ELEN E4810: Digital Signal Processing Topic 9: Filter Design: FIR 1. Windowed Impulse Response 2. Window Shapes 3. Design by Iterative Optimization 1 1. FIR Filter Design! FIR filters! no poles (just zeros)!
Discrete-Time Fourier Transform (DTFT)
") Discrete-Time Fourier Transform (DTFT) 1 Preliminaries Definition: The Discrete-Time Fourier Transform (DTFT) of a signal x[n] is defined to be X(e jω ) x[n]e jωn. (1) In other words, the DTFT of x[n]
Discrete-Time Fourier Transform (DTFT) 1 Preliminaries Definition: The Discrete-Time Fourier Transform (DTFT) of a signal x[n] is defined to be X(e jω ) x[n]e jωn. (1) In other words, the DTFT of x[n]
Review of Fundamentals of Digital Signal Processing
 Solution Manual for Theory and Applications of Digital Speech Processing by Lawrence Rabiner and Ronald Schafer Click here to Purchase full Solution Manual at http://solutionmanuals.info Link download
Solution Manual for Theory and Applications of Digital Speech Processing by Lawrence Rabiner and Ronald Schafer Click here to Purchase full Solution Manual at http://solutionmanuals.info Link download
ECE503: Digital Signal Processing Lecture 4
 ECE503: Digital Signal Processing Lecture 4 D. Richard Brown III WPI 06-February-2012 WPI D. Richard Brown III 06-February-2012 1 / 29 Lecture 4 Topics 1. Motivation for the z-transform. 2. Definition
ECE503: Digital Signal Processing Lecture 4 D. Richard Brown III WPI 06-February-2012 WPI D. Richard Brown III 06-February-2012 1 / 29 Lecture 4 Topics 1. Motivation for the z-transform. 2. Definition
Z-Transform. The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = g(t)e st dt. Z : G(z) =
 = g(t)e st dt. Z : G(z) =") Z-Transform The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = Z : G(z) = It is Used in Digital Signal Processing n= g(t)e st dt g[n]z n Used to Define Frequency
Z-Transform The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = Z : G(z) = It is Used in Digital Signal Processing n= g(t)e st dt g[n]z n Used to Define Frequency
y[n] = = h[k]x[n k] h[k]z n k k= 0 h[k]z k ) = H(z)z n h[k]z h (7.1)
![y[n] = = h[k]x[n k] h[k]z n k k= 0 h[k]z k ) = H(z)z n h[k]z h (7.1)](/thumbs/71/66089461.jpg "y[n] = = h[k]x[n k] h[k]z n k k= 0 h[k]z k ) = H(z)z n h[k]z h (7.1)") 7. The Z-transform 7. Definition of the Z-transform We saw earlier that complex exponential of the from {e jwn } is an eigen function of for a LTI System. We can generalize this for signals of the form
7. The Z-transform 7. Definition of the Z-transform We saw earlier that complex exponential of the from {e jwn } is an eigen function of for a LTI System. We can generalize this for signals of the form
Multidimensional digital signal processing
 PSfrag replacements Two-dimensional discrete signals N 1 A 2-D discrete signal (also N called a sequence or array) is a function 2 defined over thex(n set 1 of, n 2 ordered ) pairs of integers: y(nx 1,
PSfrag replacements Two-dimensional discrete signals N 1 A 2-D discrete signal (also N called a sequence or array) is a function 2 defined over thex(n set 1 of, n 2 ordered ) pairs of integers: y(nx 1,
Digital Signal Processing, Homework 1, Spring 2013, Prof. C.D. Chung
 Digital Signal Processing, Homework, Spring 203, Prof. C.D. Chung. (0.5%) Page 99, Problem 2.2 (a) The impulse response h [n] of an LTI system is known to be zero, except in the interval N 0 n N. The input
Digital Signal Processing, Homework, Spring 203, Prof. C.D. Chung. (0.5%) Page 99, Problem 2.2 (a) The impulse response h [n] of an LTI system is known to be zero, except in the interval N 0 n N. The input
Digital Signal Processing Lecture 4
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
2. CONVOLUTION. Convolution sum. Response of d.t. LTI systems at a certain input signal
 2. CONVOLUTION Convolution sum. Response of d.t. LTI systems at a certain input signal Any signal multiplied by the unit impulse = the unit impulse weighted by the value of the signal in 0: xn [ ] δ [
2. CONVOLUTION Convolution sum. Response of d.t. LTI systems at a certain input signal Any signal multiplied by the unit impulse = the unit impulse weighted by the value of the signal in 0: xn [ ] δ [
 DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
Solutions: Homework Set # 5
 Signal Processing for Communications EPFL Winter Semester 2007/2008 Prof. Suhas Diggavi Handout # 22, Tuesday, November, 2007 Solutions: Homework Set # 5 Problem (a) Since h [n] = 0, we have (b) We can
Signal Processing for Communications EPFL Winter Semester 2007/2008 Prof. Suhas Diggavi Handout # 22, Tuesday, November, 2007 Solutions: Homework Set # 5 Problem (a) Since h [n] = 0, we have (b) We can
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 3 Signals & Systems Prof. ark Fowler Note Set #28 D-T Systems: DT Filters Ideal & Practical /4 Ideal D-T Filters Just as in the CT case we can specify filters. We looked at the ideal filter for the
EECE 3 Signals & Systems Prof. ark Fowler Note Set #28 D-T Systems: DT Filters Ideal & Practical /4 Ideal D-T Filters Just as in the CT case we can specify filters. We looked at the ideal filter for the
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE)
") QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
Discrete-Time Fourier Transform
 C H A P T E R 7 Discrete-Time Fourier Transform In Chapter 3 and Appendix C, we showed that interesting continuous-time waveforms x(t) can be synthesized by summing sinusoids, or complex exponential signals,
C H A P T E R 7 Discrete-Time Fourier Transform In Chapter 3 and Appendix C, we showed that interesting continuous-time waveforms x(t) can be synthesized by summing sinusoids, or complex exponential signals,
Analog LTI system Digital LTI system
 Sampling Decimation Seismometer Amplifier AAA filter DAA filter Analog LTI system Digital LTI system Filtering (Digital Systems) input output filter xn [ ] X ~ [ k] Convolution of Sequences hn [ ] yn [
Sampling Decimation Seismometer Amplifier AAA filter DAA filter Analog LTI system Digital LTI system Filtering (Digital Systems) input output filter xn [ ] X ~ [ k] Convolution of Sequences hn [ ] yn [
Discrete-time signals and systems
 Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
UNIVERSITY OF OSLO. Faculty of mathematics and natural sciences. Forslag til fasit, versjon-01: Problem 1 Signals and systems.
 UNIVERSITY OF OSLO Faculty of mathematics and natural sciences Examination in INF3470/4470 Digital signal processing Day of examination: December 1th, 016 Examination hours: 14:30 18.30 This problem set
UNIVERSITY OF OSLO Faculty of mathematics and natural sciences Examination in INF3470/4470 Digital signal processing Day of examination: December 1th, 016 Examination hours: 14:30 18.30 This problem set
Very useful for designing and analyzing signal processing systems
 z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
Multimedia Signals and Systems - Audio and Video. Signal, Image, Video Processing Review-Introduction, MP3 and MPEG2
 Multimedia Signals and Systems - Audio and Video Signal, Image, Video Processing Review-Introduction, MP3 and MPEG2 Kunio Takaya Electrical and Computer Engineering University of Saskatchewan December
Multimedia Signals and Systems - Audio and Video Signal, Image, Video Processing Review-Introduction, MP3 and MPEG2 Kunio Takaya Electrical and Computer Engineering University of Saskatchewan December
VU Signal and Image Processing
 052600 VU Signal and Image Processing Torsten Möller + Hrvoje Bogunović + Raphael Sahann torsten.moeller@univie.ac.at hrvoje.bogunovic@meduniwien.ac.at raphael.sahann@univie.ac.at vda.cs.univie.ac.at/teaching/sip/18s/
052600 VU Signal and Image Processing Torsten Möller + Hrvoje Bogunović + Raphael Sahann torsten.moeller@univie.ac.at hrvoje.bogunovic@meduniwien.ac.at raphael.sahann@univie.ac.at vda.cs.univie.ac.at/teaching/sip/18s/
Lecture 11 FIR Filters
 Lecture 11 FIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/4/12 1 The Unit Impulse Sequence Any sequence can be represented in this way. The equation is true if k ranges
Lecture 11 FIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/4/12 1 The Unit Impulse Sequence Any sequence can be represented in this way. The equation is true if k ranges
Discrete-Time Signals and Systems. Frequency Domain Analysis of LTI Systems. The Frequency Response Function. The Frequency Response Function
 Discrete-Time Signals and s Frequency Domain Analysis of LTI s Dr. Deepa Kundur University of Toronto Reference: Sections 5., 5.2-5.5 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Discrete-Time Signals and s Frequency Domain Analysis of LTI s Dr. Deepa Kundur University of Toronto Reference: Sections 5., 5.2-5.5 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Chap 2. Discrete-Time Signals and Systems
 Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Digital Filter Structures
 Chapter 8 Digital Filter Structures 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 8-1 Block Diagram Representation The convolution sum description of an LTI discrete-time system can, in principle, be used to
Chapter 8 Digital Filter Structures 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 8-1 Block Diagram Representation The convolution sum description of an LTI discrete-time system can, in principle, be used to
Review of Discrete-Time System
 Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
2. Typical Discrete-Time Systems All-Pass Systems (5.5) 2.2. Minimum-Phase Systems (5.6) 2.3. Generalized Linear-Phase Systems (5.
 2.2. Minimum-Phase Systems (5.6) 2.3. Generalized Linear-Phase Systems (5.") . Typical Discrete-Time Systems.1. All-Pass Systems (5.5).. Minimum-Phase Systems (5.6).3. Generalized Linear-Phase Systems (5.7) .1. All-Pass Systems An all-pass system is defined as a system which has
. Typical Discrete-Time Systems.1. All-Pass Systems (5.5).. Minimum-Phase Systems (5.6).3. Generalized Linear-Phase Systems (5.7) .1. All-Pass Systems An all-pass system is defined as a system which has
EE482: Digital Signal Processing Applications
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 02 DSP Fundamentals 14/01/21 http://www.ee.unlv.edu/~b1morris/ee482/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 02 DSP Fundamentals 14/01/21 http://www.ee.unlv.edu/~b1morris/ee482/
! Introduction. ! Discrete Time Signals & Systems. ! Z-Transform. ! Inverse Z-Transform. ! Sampling of Continuous Time Signals
 ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
Notes 22 largely plagiarized by %khc
 Notes 22 largely plagiarized by %khc LTv. ZT Using the conformal map z e st, we can transfer our knowledge of the ROC of the bilateral laplace transform to the ROC of the bilateral z transform. Laplace
Notes 22 largely plagiarized by %khc LTv. ZT Using the conformal map z e st, we can transfer our knowledge of the ROC of the bilateral laplace transform to the ROC of the bilateral z transform. Laplace
INF3440/INF4440. Design of digital filters
 Last week lecture Today s lecture: Chapter 8.1-8.3, 8.4.2, 8.5.3 INF3440/INF4440. Design of digital filters October 2004 Last week lecture Today s lecture: Chapter 8.1-8.3, 8.4.2, 8.5.3 Last lectures:
Last week lecture Today s lecture: Chapter 8.1-8.3, 8.4.2, 8.5.3 INF3440/INF4440. Design of digital filters October 2004 Last week lecture Today s lecture: Chapter 8.1-8.3, 8.4.2, 8.5.3 Last lectures:
# FIR. [ ] = b k. # [ ]x[ n " k] [ ] = h k. x[ n] = Ae j" e j# ˆ n Complex exponential input. [ ]Ae j" e j ˆ. ˆ )Ae j# e j ˆ. y n. y n.
![# FIR. [ ] = b k. # [ ]x[ n k] [ ] = h k. x[ n] = Ae j e j# ˆ n Complex exponential input. [ ]Ae j e j ˆ. ˆ )Ae j# e j ˆ. y n. y n.](/thumbs/88/116624032.jpg "# FIR. [ ] = b k. # [ ]x[ n k] [ ] = h k. x[ n] = Ae j e j# ˆ n Complex exponential input. [ ]Ae j e j ˆ. ˆ )Ae j# e j ˆ. y n. y n.") [ ] = h k M [ ] = b k x[ n " k] FIR k= M [ ]x[ n " k] convolution k= x[ n] = Ae j" e j ˆ n Complex exponential input [ ] = h k M % k= [ ]Ae j" e j ˆ % M = ' h[ k]e " j ˆ & k= k = H (" ˆ )Ae j e j ˆ ( )
[ ] = h k M [ ] = b k x[ n " k] FIR k= M [ ]x[ n " k] convolution k= x[ n] = Ae j" e j ˆ n Complex exponential input [ ] = h k M % k= [ ]Ae j" e j ˆ % M = ' h[ k]e " j ˆ & k= k = H (" ˆ )Ae j e j ˆ ( )
DIGITAL SIGNAL PROCESSING. Chapter 3 z-transform
 DIGITAL SIGNAL PROCESSING Chapter 3 z-transform by Dr. Norizam Sulaiman Faculty of Electrical & Electronics Engineering norizam@ump.edu.my OER Digital Signal Processing by Dr. Norizam Sulaiman work is
DIGITAL SIGNAL PROCESSING Chapter 3 z-transform by Dr. Norizam Sulaiman Faculty of Electrical & Electronics Engineering norizam@ump.edu.my OER Digital Signal Processing by Dr. Norizam Sulaiman work is
GATE EE Topic wise Questions SIGNALS & SYSTEMS
 www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
DSP-I DSP-I DSP-I DSP-I
 DSP-I DSP-I DSP-I DSP-I Digital Signal Processing I (8-79) Fall Semester, 005 OTES FOR 8-79 LECTURE 9: PROPERTIES AD EXAPLES OF Z-TRASFORS Distributed: September 7, 005 otes: This handout contains in outline
DSP-I DSP-I DSP-I DSP-I Digital Signal Processing I (8-79) Fall Semester, 005 OTES FOR 8-79 LECTURE 9: PROPERTIES AD EXAPLES OF Z-TRASFORS Distributed: September 7, 005 otes: This handout contains in outline
Chapter 5 THE APPLICATION OF THE Z TRANSFORM. 5.3 Stability
 Chapter 5 THE APPLICATION OF THE Z TRANSFORM 5.3 Stability Copyright c 2005- Andreas Antoniou Victoria, BC, Canada Email: aantoniou@ieee.org February 13, 2008 Frame # 1 Slide # 1 A. Antoniou Digital Signal
Chapter 5 THE APPLICATION OF THE Z TRANSFORM 5.3 Stability Copyright c 2005- Andreas Antoniou Victoria, BC, Canada Email: aantoniou@ieee.org February 13, 2008 Frame # 1 Slide # 1 A. Antoniou Digital Signal
EE-210. Signals and Systems Homework 7 Solutions
 EE-20. Signals and Systems Homework 7 Solutions Spring 200 Exercise Due Date th May. Problems Q Let H be the causal system described by the difference equation w[n] = 7 w[n ] 2 2 w[n 2] + x[n ] x[n 2]
EE-20. Signals and Systems Homework 7 Solutions Spring 200 Exercise Due Date th May. Problems Q Let H be the causal system described by the difference equation w[n] = 7 w[n ] 2 2 w[n 2] + x[n ] x[n 2]
Digital Signal Processing Lecture 5
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 5 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 5 Begüm Demir E-mail:
Z Transform (Part - II)
") Z Transform (Part - II). The Z Transform of the following real exponential sequence x(nt) = a n, nt 0 = 0, nt < 0, a > 0 (a) ; z > (c) for all z z (b) ; z (d) ; z < a > a az az Soln. The given sequence
Z Transform (Part - II). The Z Transform of the following real exponential sequence x(nt) = a n, nt 0 = 0, nt < 0, a > 0 (a) ; z > (c) for all z z (b) ; z (d) ; z < a > a az az Soln. The given sequence
Question Bank. UNIT 1 Part-A
 FATIMA MICHAEL COLLEGE OF ENGINEERING & TECHNOLOGY Senkottai Village, Madurai Sivagangai Main Road, Madurai -625 020 An ISO 9001:2008 Certified Institution Question Bank DEPARTMENT OF ELECTRONICS AND COMMUNICATION
FATIMA MICHAEL COLLEGE OF ENGINEERING & TECHNOLOGY Senkottai Village, Madurai Sivagangai Main Road, Madurai -625 020 An ISO 9001:2008 Certified Institution Question Bank DEPARTMENT OF ELECTRONICS AND COMMUNICATION
Filter Design Problem
 Filter Design Problem Design of frequency-selective filters usually starts with a specification of their frequency response function. Practical filters have passband and stopband ripples, while exhibiting
Filter Design Problem Design of frequency-selective filters usually starts with a specification of their frequency response function. Practical filters have passband and stopband ripples, while exhibiting
A system that is both linear and time-invariant is called linear time-invariant (LTI).
.") The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
EE102B Signal Processing and Linear Systems II. Solutions to Problem Set Nine Spring Quarter
 EE02B Signal Processing and Linear Systems II Solutions to Problem Set Nine 202-203 Spring Quarter Problem 9. (25 points) (a) 0.5( + 4z + 6z 2 + 4z 3 + z 4 ) + 0.2z 0.4z 2 + 0.8z 3 x[n] 0.5 y[n] -0.2 Z
EE02B Signal Processing and Linear Systems II Solutions to Problem Set Nine 202-203 Spring Quarter Problem 9. (25 points) (a) 0.5( + 4z + 6z 2 + 4z 3 + z 4 ) + 0.2z 0.4z 2 + 0.8z 3 x[n] 0.5 y[n] -0.2 Z
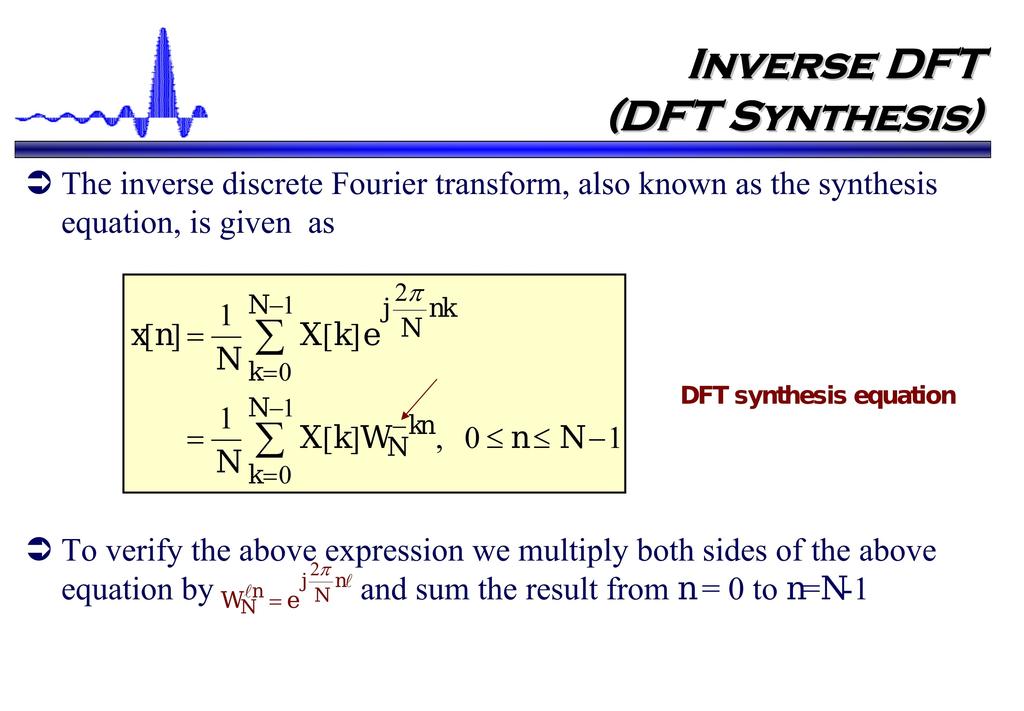
Lecture 10. Digital Signal Processing. Chapter 7. Discrete Fourier transform DFT. Mikael Swartling Nedelko Grbic Bengt Mandersson. rev.
 Lecture 10 Digital Signal Processing Chapter 7 Discrete Fourier transform DFT Mikael Swartling Nedelko Grbic Bengt Mandersson rev. 016 Department of Electrical and Information Technology Lund University
Lecture 10 Digital Signal Processing Chapter 7 Discrete Fourier transform DFT Mikael Swartling Nedelko Grbic Bengt Mandersson rev. 016 Department of Electrical and Information Technology Lund University
ECSE 512 Digital Signal Processing I Fall 2010 FINAL EXAMINATION
 FINAL EXAMINATION 9:00 am 12:00 pm, December 20, 2010 Duration: 180 minutes Examiner: Prof. M. Vu Assoc. Examiner: Prof. B. Champagne There are 6 questions for a total of 120 points. This is a closed book
FINAL EXAMINATION 9:00 am 12:00 pm, December 20, 2010 Duration: 180 minutes Examiner: Prof. M. Vu Assoc. Examiner: Prof. B. Champagne There are 6 questions for a total of 120 points. This is a closed book
Digital Signal Processing. Midterm 1 Solution
 EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
Lecture 04: Discrete Frequency Domain Analysis (z-transform)
") Lecture 04: Discrete Frequency Domain Analysis (z-transform) John Chiverton School of Information Technology Mae Fah Luang University 1st Semester 2009/ 2552 Outline Overview Lecture Contents Introduction
Lecture 04: Discrete Frequency Domain Analysis (z-transform) John Chiverton School of Information Technology Mae Fah Luang University 1st Semester 2009/ 2552 Outline Overview Lecture Contents Introduction
Z-TRANSFORMS. Solution: Using the definition (5.1.2), we find: for case (b). y(n)= h(n) x(n) Y(z)= H(z)X(z) (convolution) (5.1.
, we find: for case (b). y(n)= h(n) x(n) Y(z)= H(z)X(z) (convolution) (5.1.") 84 5. Z-TRANSFORMS 5 z-transforms Solution: Using the definition (5..2), we find: for case (a), and H(z) h 0 + h z + h 2 z 2 + h 3 z 3 2 + 3z + 5z 2 + 2z 3 H(z) h 0 + h z + h 2 z 2 + h 3 z 3 + h 4 z 4
84 5. Z-TRANSFORMS 5 z-transforms Solution: Using the definition (5..2), we find: for case (a), and H(z) h 0 + h z + h 2 z 2 + h 3 z 3 2 + 3z + 5z 2 + 2z 3 H(z) h 0 + h z + h 2 z 2 + h 3 z 3 + h 4 z 4
Signals and Systems. Problem Set: The z-transform and DT Fourier Transform
 Signals and Systems Problem Set: The z-transform and DT Fourier Transform Updated: October 9, 7 Problem Set Problem - Transfer functions in MATLAB A discrete-time, causal LTI system is described by the
Signals and Systems Problem Set: The z-transform and DT Fourier Transform Updated: October 9, 7 Problem Set Problem - Transfer functions in MATLAB A discrete-time, causal LTI system is described by the
EE 3054: Signals, Systems, and Transforms Spring A causal discrete-time LTI system is described by the equation. y(n) = 1 4.
 = 1 4.") EE : Signals, Systems, and Transforms Spring 7. A causal discrete-time LTI system is described by the equation Test y(n) = X x(n k) k= No notes, closed book. Show your work. Simplify your answers.. A discrete-time
EE : Signals, Systems, and Transforms Spring 7. A causal discrete-time LTI system is described by the equation Test y(n) = X x(n k) k= No notes, closed book. Show your work. Simplify your answers.. A discrete-time
E : Lecture 1 Introduction
 E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
X (z) = n= 1. Ã! X (z) x [n] X (z) = Z fx [n]g x [n] = Z 1 fx (z)g. r n x [n] ª e jnω
![X (z) = n= 1. Ã! X (z) x [n] X (z) = Z fx [n]g x [n] = Z 1 fx (z)g. r n x [n] ª e jnω](/thumbs/82/85448077.jpg "X (z) = n= 1. Ã! X (z) x [n] X (z) = Z fx [n]g x [n] = Z 1 fx (z)g. r n x [n] ª e jnω") 3 The z-transform ² Two advantages with the z-transform:. The z-transform is a generalization of the Fourier transform for discrete-time signals; which encompasses a broader class of sequences. The z-transform
3 The z-transform ² Two advantages with the z-transform:. The z-transform is a generalization of the Fourier transform for discrete-time signals; which encompasses a broader class of sequences. The z-transform
Digital Signal Processing Lecture 9 - Design of Digital Filters - FIR
 Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
Signals and Systems Lecture 8: Z Transform
 Signals and Systems Lecture 8: Z Transform Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 Farzaneh Abdollahi Signal and Systems Lecture 8 1/29 Introduction
Signals and Systems Lecture 8: Z Transform Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 Farzaneh Abdollahi Signal and Systems Lecture 8 1/29 Introduction
Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform.
 Inversion of the z-transform Focus on rational z-transform of z 1. Apply partial fraction expansion. Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform. Let X(z)
Inversion of the z-transform Focus on rational z-transform of z 1. Apply partial fraction expansion. Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform. Let X(z)
III. Time Domain Analysis of systems
 1 III. Time Domain Analysis of systems Here, we adapt properties of continuous time systems to discrete time systems Section 2.2-2.5, pp 17-39 System Notation y(n) = T[ x(n) ] A. Types of Systems Memoryless
1 III. Time Domain Analysis of systems Here, we adapt properties of continuous time systems to discrete time systems Section 2.2-2.5, pp 17-39 System Notation y(n) = T[ x(n) ] A. Types of Systems Memoryless
Continuous and Discrete Time Signals and Systems
 Continuous and Discrete Time Signals and Systems Mrinal Mandal University of Alberta, Edmonton, Canada and Amir Asif York University, Toronto, Canada CAMBRIDGE UNIVERSITY PRESS Contents Preface Parti Introduction
Continuous and Discrete Time Signals and Systems Mrinal Mandal University of Alberta, Edmonton, Canada and Amir Asif York University, Toronto, Canada CAMBRIDGE UNIVERSITY PRESS Contents Preface Parti Introduction