The Laplace Transform
|
|
|
- Jack Ellis
- 6 years ago
- Views:
Transcription

1 The Laplace Tranform Prof. Siripong Potiuk Pierre Simon De Laplace French Atronomer and Mathematician


2 Laplace Tranform An extenion of the CT Fourier tranform to allow analyi of broader cla of CT ignal and ytem Handle an important cla of untable ytem whoe ignal are not abolutely integrable, i.e., 2
3 Condition for CTFT Exitence Applicable for aperiodic ignal of finite and infinite duration which atifie: (a (b Dirichlet' Condition Finite Energy : x( t 2 dt Bilateral Laplace Tranform Satify the condition of abolute integrability by multiplying x(t by a convergence factor e -t for ome value of X ( j { x( t e t } e jt dt CTFT{ x( t e Combine the exponential and let = +j t } 3
4 Region of Convergence (ROC Convergence i a critical iue in dealing with Laplace tranform X( exit for ome value of, and all An area in the complex or -plane defined by uch that the Fourier integral converge i called the region of convergence (ROC t ROC { j C x( t e dt } Example. Determine the Laplace tranform along with the correponding ROC of the ignal at x( t e u( t, a i real or complex 4
5 Example 2. Determine the Laplace tranform along with the correponding ROC of the ignal at x( t e u( t, a i real or complex 5
6 Example 3. Determine the Laplace tranform along with the correponding ROC of the ignal ( a x( t Ce t, j t ( b y( t e 0, t t Rational Laplace Tranform For mot practical ignal, the Laplace tranform can be expreed a a ratio of two polynomial where z, z and N( b0 ( z( z2 ( z X ( D( a ( p ( p ( p of the numerator polynomial p, p 2 2,, z M,, p N are the zeroe of X(,i.e., the root are the pole of X(,i.e., the root of the denominator polynomial. 0 2 M N 6

7 7 Rational Laplace Tranform N N N M M M N M a a b b b p p p z z z b D N X ( ( ( ( ( ( ( ( ( It i cutomary to normalize the denominator polynomial to make it leading coefficient one, i.e., Alo, X( i a proper rational tranform if pole. # of zeroe # of i.e., M N, The complex -plane + j (Re{} (Im{}
8 The pole-zero plot of a rational Laplace tranform in the -plane. Laplace Tranform Propertie Parallel many of the CTFT propertie, except for the need to pecify ROC Linearity: Time-hifting 8
9 Example 4. Determine the Laplace tranform along with the correponding ROC of the ignal x t e u t e u t 2t t ( 3 ( 2 ( Propertie of the ROC 9
10 0
11

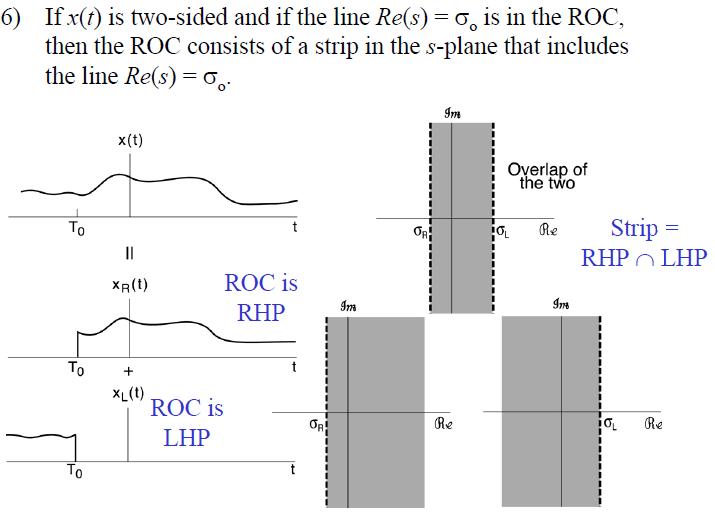
12 7 If X( i rational, it ROC i bounded by pole or extend to infinity. Alo, no pole of X( are contained in the ROC. (a x(t right-ided ROC to the right of rightmot pole (b x(t left-ided ROC to the left of leftmot pole (c x(t two-ided ROC a trip between two pole 8 ROC of x(t contain j-axi CTFT of x(t exit 2
13 Invere Laplace Tranform Tranform back from the -domain to the time domain Generally, computed by For rational Laplace tranform, expand in term of partial fraction and ue table of tranform pair and propertie From the previou example, the time-domain ignal, x(t, reulting from the inverion proce for each ROC i 3
14 Example 5. Determine the number of all poible ignal that have imilar Laplace tranform below but different ROC. X ( ( 2( 3( 2 4
15 Convolution Property L Y ( H ( X ( Laplace tranform of output Laplace tranform of input Eigenfunction of LTI Sytem An eigenfunction of a ytem i an input ignal that, when applied to a ytem, reult in the output being the caled verion of itelf. The caling factor i known a the ytem eigenvalue. Complex exponential are eigenfunction of LTI ytem, i.e., the repone of an LTI ytem to a complex exponential input i the ame complex exponential with only a change in amplitude. 5
16 H( = L{h(t} = Laplace tranform of impule repone H( i called the ytem function or tranfer function Checking Cauality of LTI Sytem A caual LTI ytem ha a caual impule repone (i.e., h(t < 0 for t < 0 ROC of tranfer function for a caual ytem i a RHP, but the convere i not true However, a ytem with rational tranfer function i caual iff it ROC i the plane to the right of the rightmot pole Similar tatement can be aid about an anticaual ytem 6
17 Checking Stability of LTI Sytem A BIBO table LTI ytem ha an abolutely integrable impule repone (i.e., CTFT of the impule repone converge Conequently, an LTI ytem i BIBO table iff the ROC of it tranfer function include the entire j-axi In term of pole, a caual ytem with rational tranfer function i BIBO table iff all of the pole lie in the LHP (i.e., all pole have negative real part The Unilateral Laplace Tranform - The unilateral Laplace tranform of a CT ignal x(t i defined a X ( x( t e 0 - Equivalent to the bilateral Laplace tranform of x(tu(t - Since x(tu(t i alway a right-ided ignal, ROC of X( alway include the RHP t - Ueful for olving LCCDE with initial condition dt 7
( ) ( ) ω = X x t e dt
 ( ) ω = X x t e dt") The Laplace Tranform The Laplace Tranform generalize the Fourier Traform for the entire complex plane For an ignal x(t) the pectrum, or it Fourier tranform i (if it exit): t X x t e dt ω = For the ame
The Laplace Tranform The Laplace Tranform generalize the Fourier Traform for the entire complex plane For an ignal x(t) the pectrum, or it Fourier tranform i (if it exit): t X x t e dt ω = For the ame
Design of Digital Filters
 Deign of Digital Filter Paley-Wiener Theorem [ ] ( ) If h n i a caual energy ignal, then ln H e dω< B where B i a finite upper bound. One implication of the Paley-Wiener theorem i that a tranfer function
Deign of Digital Filter Paley-Wiener Theorem [ ] ( ) If h n i a caual energy ignal, then ln H e dω< B where B i a finite upper bound. One implication of the Paley-Wiener theorem i that a tranfer function
( 1) EE 313 Linear Signals & Systems (Fall 2018) Solution Set for Homework #10 on Laplace Transforms
 EE 313 Linear Signals & Systems (Fall 2018) Solution Set for Homework #10 on Laplace Transforms") EE 33 Linear Signal & Sytem (Fall 08) Solution Set for Homework #0 on Laplace Tranform By: Mr. Houhang Salimian & Prof. Brian L. Evan Problem. a) xt () = ut () ut ( ) From lecture Lut { ()} = and { } t
EE 33 Linear Signal & Sytem (Fall 08) Solution Set for Homework #0 on Laplace Tranform By: Mr. Houhang Salimian & Prof. Brian L. Evan Problem. a) xt () = ut () ut ( ) From lecture Lut { ()} = and { } t
Given the following circuit with unknown initial capacitor voltage v(0): X(s) Immediately, we know that the transfer function H(s) is
: X(s) Immediately, we know that the transfer function H(s) is") EE 4G Note: Chapter 6 Intructor: Cheung More about ZSR and ZIR. Finding unknown initial condition: Given the following circuit with unknown initial capacitor voltage v0: F v0/ / Input xt 0Ω Output yt -
EE 4G Note: Chapter 6 Intructor: Cheung More about ZSR and ZIR. Finding unknown initial condition: Given the following circuit with unknown initial capacitor voltage v0: F v0/ / Input xt 0Ω Output yt -
EE C128 / ME C134 Problem Set 1 Solution (Fall 2010) Wenjie Chen and Jansen Sheng, UC Berkeley
 Wenjie Chen and Jansen Sheng, UC Berkeley") EE C28 / ME C34 Problem Set Solution (Fall 200) Wenjie Chen and Janen Sheng, UC Berkeley. (0 pt) BIBO tability The ytem h(t) = co(t)u(t) i not BIBO table. What i the region of convergence for H()? A bounded
EE C28 / ME C34 Problem Set Solution (Fall 200) Wenjie Chen and Janen Sheng, UC Berkeley. (0 pt) BIBO tability The ytem h(t) = co(t)u(t) i not BIBO table. What i the region of convergence for H()? A bounded
Digital Control System
 Digital Control Sytem Summary # he -tranform play an important role in digital control and dicrete ignal proceing. he -tranform i defined a F () f(k) k () A. Example Conider the following equence: f(k)
Digital Control Sytem Summary # he -tranform play an important role in digital control and dicrete ignal proceing. he -tranform i defined a F () f(k) k () A. Example Conider the following equence: f(k)
Linear System Fundamentals
 Linear Sytem Fundamental MEM 355 Performance Enhancement of Dynamical Sytem Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Content Sytem Repreentation Stability Concept
Linear Sytem Fundamental MEM 355 Performance Enhancement of Dynamical Sytem Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Content Sytem Repreentation Stability Concept
ECE 3620: Laplace Transforms: Chapter 3:
 ECE 3620: Laplace Transforms: Chapter 3: 3.1-3.4 Prof. K. Chandra ECE, UMASS Lowell September 21, 2016 1 Analysis of LTI Systems in the Frequency Domain Thus far we have understood the relationship between
ECE 3620: Laplace Transforms: Chapter 3: 3.1-3.4 Prof. K. Chandra ECE, UMASS Lowell September 21, 2016 1 Analysis of LTI Systems in the Frequency Domain Thus far we have understood the relationship between
Lecture 2: The z-transform
 5-59- Control Sytem II FS 28 Lecture 2: The -Tranform From the Laplace Tranform to the tranform The Laplace tranform i an integral tranform which take a function of a real variable t to a function of a
5-59- Control Sytem II FS 28 Lecture 2: The -Tranform From the Laplace Tranform to the tranform The Laplace tranform i an integral tranform which take a function of a real variable t to a function of a
The Laplace Transform
 The Laplace Transform Introduction There are two common approaches to the developing and understanding the Laplace transform It can be viewed as a generalization of the CTFT to include some signals with
The Laplace Transform Introduction There are two common approaches to the developing and understanding the Laplace transform It can be viewed as a generalization of the CTFT to include some signals with
Analysis of Stability &
 INC 34 Feedback Control Sytem Analyi of Stability & Steady-State Error S Wonga arawan.won@kmutt.ac.th Summary from previou cla Firt-order & econd order ytem repone τ ωn ζω ω n n.8.6.4. ζ ζ. ζ.5 ζ ζ.5 ct.8.6.4...4.6.8..4.6.8
INC 34 Feedback Control Sytem Analyi of Stability & Steady-State Error S Wonga arawan.won@kmutt.ac.th Summary from previou cla Firt-order & econd order ytem repone τ ωn ζω ω n n.8.6.4. ζ ζ. ζ.5 ζ ζ.5 ct.8.6.4...4.6.8..4.6.8
Sampling and the Discrete Fourier Transform
 Sampling and the Dicrete Fourier Tranform Sampling Method Sampling i mot commonly done with two device, the ample-and-hold (S/H) and the analog-to-digital-converter (ADC) The S/H acquire a CT ignal at
Sampling and the Dicrete Fourier Tranform Sampling Method Sampling i mot commonly done with two device, the ample-and-hold (S/H) and the analog-to-digital-converter (ADC) The S/H acquire a CT ignal at
Lecture 10 Filtering: Applied Concepts
 Lecture Filtering: Applied Concept In the previou two lecture, you have learned about finite-impule-repone (FIR) and infinite-impule-repone (IIR) filter. In thee lecture, we introduced the concept of filtering
Lecture Filtering: Applied Concept In the previou two lecture, you have learned about finite-impule-repone (FIR) and infinite-impule-repone (IIR) filter. In thee lecture, we introduced the concept of filtering
into a discrete time function. Recall that the table of Laplace/z-transforms is constructed by (i) selecting to get
 selecting to get") Lecture 25 Introduction to Some Matlab c2d Code in Relation to Sampled Sytem here are many way to convert a continuou time function, { h( t) ; t [0, )} into a dicrete time function { h ( k) ; k {0,,, }}
Lecture 25 Introduction to Some Matlab c2d Code in Relation to Sampled Sytem here are many way to convert a continuou time function, { h( t) ; t [0, )} into a dicrete time function { h ( k) ; k {0,,, }}
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 31 Signal & Syem Prof. Mark Fowler Noe Se #27 C-T Syem: Laplace Tranform Power Tool for yem analyi Reading Aignmen: Secion 6.1 6.3 of Kamen and Heck 1/18 Coure Flow Diagram The arrow here how concepual
EECE 31 Signal & Syem Prof. Mark Fowler Noe Se #27 C-T Syem: Laplace Tranform Power Tool for yem analyi Reading Aignmen: Secion 6.1 6.3 of Kamen and Heck 1/18 Coure Flow Diagram The arrow here how concepual
Feedback Control Systems (FCS)
") Feedback Control Sytem (FCS) Lecture19-20 Routh-Herwitz Stability Criterion Dr. Imtiaz Huain email: imtiaz.huain@faculty.muet.edu.pk URL :http://imtiazhuainkalwar.weebly.com/ Stability of Higher Order
Feedback Control Sytem (FCS) Lecture19-20 Routh-Herwitz Stability Criterion Dr. Imtiaz Huain email: imtiaz.huain@faculty.muet.edu.pk URL :http://imtiazhuainkalwar.weebly.com/ Stability of Higher Order
Signals and Systems. Spring Room 324, Geology Palace, ,
 Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
Spring 2014 EE 445S Real-Time Digital Signal Processing Laboratory. Homework #0 Solutions on Review of Signals and Systems Material
 Spring 4 EE 445S Real-Time Digital Signal Proceing Laboratory Prof. Evan Homework # Solution on Review of Signal and Sytem Material Problem.. Continuou-Time Sinuoidal Generation. In practice, we cannot
Spring 4 EE 445S Real-Time Digital Signal Proceing Laboratory Prof. Evan Homework # Solution on Review of Signal and Sytem Material Problem.. Continuou-Time Sinuoidal Generation. In practice, we cannot
Wolfgang Hofle. CERN CAS Darmstadt, October W. Hofle feedback systems
 Wolfgang Hofle Wolfgang.Hofle@cern.ch CERN CAS Darmtadt, October 9 Feedback i a mechanim that influence a ytem by looping back an output to the input a concept which i found in abundance in nature and
Wolfgang Hofle Wolfgang.Hofle@cern.ch CERN CAS Darmtadt, October 9 Feedback i a mechanim that influence a ytem by looping back an output to the input a concept which i found in abundance in nature and
Chapter 2 Sampling and Quantization. In order to investigate sampling and quantization, the difference between analog
 Chapter Sampling and Quantization.1 Analog and Digital Signal In order to invetigate ampling and quantization, the difference between analog and digital ignal mut be undertood. Analog ignal conit of continuou
Chapter Sampling and Quantization.1 Analog and Digital Signal In order to invetigate ampling and quantization, the difference between analog and digital ignal mut be undertood. Analog ignal conit of continuou
Chapter 4: Applications of Fourier Representations. Chih-Wei Liu
 Chapter 4: Application of Fourier Repreentation Chih-Wei Liu Outline Introduction Fourier ranform of Periodic Signal Convolution/Multiplication with Non-Periodic Signal Fourier ranform of Dicrete-ime Signal
Chapter 4: Application of Fourier Repreentation Chih-Wei Liu Outline Introduction Fourier ranform of Periodic Signal Convolution/Multiplication with Non-Periodic Signal Fourier ranform of Dicrete-ime Signal
Control Systems Engineering ( Chapter 7. Steady-State Errors ) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
18.03SC Final Exam = x 2 y ( ) + x This problem concerns the differential equation. dy 2
 + x This problem concerns the differential equation. dy 2") 803SC Final Exam Thi problem concern the differential equation dy = x y ( ) dx Let y = f (x) be the olution with f ( ) = 0 (a) Sketch the iocline for lope, 0, and, and ketch the direction field along them
803SC Final Exam Thi problem concern the differential equation dy = x y ( ) dx Let y = f (x) be the olution with f ( ) = 0 (a) Sketch the iocline for lope, 0, and, and ketch the direction field along them
Lecture 17: Analytic Functions and Integrals (See Chapter 14 in Boas)
") Lecture 7: Analytic Function and Integral (See Chapter 4 in Boa) Thi i a good point to take a brief detour and expand on our previou dicuion of complex variable and complex function of complex variable.
Lecture 7: Analytic Function and Integral (See Chapter 4 in Boa) Thi i a good point to take a brief detour and expand on our previou dicuion of complex variable and complex function of complex variable.
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuits II. Solutions to Assignment 3 February 2005.
 SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2005. Initial Condition Source 0 V battery witch flip at t 0 find i 3 (t) Component value:
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2005. Initial Condition Source 0 V battery witch flip at t 0 find i 3 (t) Component value:
Analysis of Step Response, Impulse and Ramp Response in the Continuous Stirred Tank Reactor System
 ISSN: 454-50 Volume 0 - Iue 05 May 07 PP. 7-78 Analyi of Step Repone, Impule and Ramp Repone in the ontinuou Stirred Tank Reactor Sytem * Zohreh Khohraftar, Pirouz Derakhhi, (Department of hemitry, Science
ISSN: 454-50 Volume 0 - Iue 05 May 07 PP. 7-78 Analyi of Step Repone, Impule and Ramp Repone in the ontinuou Stirred Tank Reactor Sytem * Zohreh Khohraftar, Pirouz Derakhhi, (Department of hemitry, Science
Chapter 4 Interconnection of LTI Systems
 Chapter 4 Interconnection of LTI Sytem 4. INTRODUCTION Block diagram and ignal flow graph are commonly ued to decribe a large feedback control ytem. Each block in the ytem i repreented by a tranfer function,
Chapter 4 Interconnection of LTI Sytem 4. INTRODUCTION Block diagram and ignal flow graph are commonly ued to decribe a large feedback control ytem. Each block in the ytem i repreented by a tranfer function,
7.2 INVERSE TRANSFORMS AND TRANSFORMS OF DERIVATIVES 281
 72 INVERSE TRANSFORMS AND TRANSFORMS OF DERIVATIVES 28 and i 2 Show how Euler formula (page 33) can then be ued to deduce the reult a ( a) 2 b 2 {e at co bt} {e at in bt} b ( a) 2 b 2 5 Under what condition
72 INVERSE TRANSFORMS AND TRANSFORMS OF DERIVATIVES 28 and i 2 Show how Euler formula (page 33) can then be ued to deduce the reult a ( a) 2 b 2 {e at co bt} {e at in bt} b ( a) 2 b 2 5 Under what condition
Bogoliubov Transformation in Classical Mechanics
 Bogoliubov Tranformation in Claical Mechanic Canonical Tranformation Suppoe we have a et of complex canonical variable, {a j }, and would like to conider another et of variable, {b }, b b ({a j }). How
Bogoliubov Tranformation in Claical Mechanic Canonical Tranformation Suppoe we have a et of complex canonical variable, {a j }, and would like to conider another et of variable, {b }, b b ({a j }). How
Practice Problems - Week #7 Laplace - Step Functions, DE Solutions Solutions
 For Quetion -6, rewrite the piecewie function uing tep function, ketch their graph, and find F () = Lf(t). 0 0 < t < 2. f(t) = (t 2 4) 2 < t In tep-function form, f(t) = u 2 (t 2 4) The graph i the olid
For Quetion -6, rewrite the piecewie function uing tep function, ketch their graph, and find F () = Lf(t). 0 0 < t < 2. f(t) = (t 2 4) 2 < t In tep-function form, f(t) = u 2 (t 2 4) The graph i the olid
Roadmap for Discrete-Time Signal Processing
 EE 4G Note: Chapter 8 Continuou-time Signal co(πf Roadmap for Dicrete-ime Signal Proceing.5 -.5 -..4.6.8..4.6.8 Dicrete-time Signal (Section 8.).5 -.5 -..4.6.8..4.6.8 Sampling Period econd (or ampling
EE 4G Note: Chapter 8 Continuou-time Signal co(πf Roadmap for Dicrete-ime Signal Proceing.5 -.5 -..4.6.8..4.6.8 Dicrete-time Signal (Section 8.).5 -.5 -..4.6.8..4.6.8 Sampling Period econd (or ampling
MAHALAKSHMI ENGINEERING COLLEGE-TRICHY
 DIGITAL SIGNAL PROCESSING DEPT./SEM.: CSE /VII DIGITAL FILTER DESIGN-IIR & FIR FILTER DESIGN PART-A. Lit the different type of tructure for realiation of IIR ytem? AUC APR 09 The different type of tructure
DIGITAL SIGNAL PROCESSING DEPT./SEM.: CSE /VII DIGITAL FILTER DESIGN-IIR & FIR FILTER DESIGN PART-A. Lit the different type of tructure for realiation of IIR ytem? AUC APR 09 The different type of tructure
Module 4: Time Response of discrete time systems Lecture Note 1
 Digital Control Module 4 Lecture Module 4: ime Repone of dicrete time ytem Lecture Note ime Repone of dicrete time ytem Abolute tability i a baic requirement of all control ytem. Apart from that, good
Digital Control Module 4 Lecture Module 4: ime Repone of dicrete time ytem Lecture Note ime Repone of dicrete time ytem Abolute tability i a baic requirement of all control ytem. Apart from that, good
Chapter 7: The Laplace Transform Part 1
 Chapter 7: The Laplace Tranform Part 1 王奕翔 Department of Electrical Engineering National Taiwan Univerity ihwang@ntu.edu.tw November 26, 213 1 / 34 王奕翔 DE Lecture 1 Solving an initial value problem aociated
Chapter 7: The Laplace Tranform Part 1 王奕翔 Department of Electrical Engineering National Taiwan Univerity ihwang@ntu.edu.tw November 26, 213 1 / 34 王奕翔 DE Lecture 1 Solving an initial value problem aociated
A system that is both linear and time-invariant is called linear time-invariant (LTI).
.") The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
Chapter 6: The Laplace Transform. Chih-Wei Liu
 Chapter 6: The Laplace Transform Chih-Wei Liu Outline Introduction The Laplace Transform The Unilateral Laplace Transform Properties of the Unilateral Laplace Transform Inversion of the Unilateral Laplace
Chapter 6: The Laplace Transform Chih-Wei Liu Outline Introduction The Laplace Transform The Unilateral Laplace Transform Properties of the Unilateral Laplace Transform Inversion of the Unilateral Laplace
SAMPLING. Sampling is the acquisition of a continuous signal at discrete time intervals and is a fundamental concept in real-time signal processing.
 SAMPLING Sampling i the acquiition of a continuou ignal at dicrete time interval and i a fundamental concept in real-time ignal proceing. he actual ampling operation can alo be defined by the figure belo
SAMPLING Sampling i the acquiition of a continuou ignal at dicrete time interval and i a fundamental concept in real-time ignal proceing. he actual ampling operation can alo be defined by the figure belo
Advanced Digital Signal Processing. Stationary/nonstationary signals. Time-Frequency Analysis... Some nonstationary signals. Time-Frequency Analysis
 Advanced Digital ignal Proceing Prof. Nizamettin AYDIN naydin@yildiz.edu.tr Time-Frequency Analyi http://www.yildiz.edu.tr/~naydin 2 tationary/nontationary ignal Time-Frequency Analyi Fourier Tranform
Advanced Digital ignal Proceing Prof. Nizamettin AYDIN naydin@yildiz.edu.tr Time-Frequency Analyi http://www.yildiz.edu.tr/~naydin 2 tationary/nontationary ignal Time-Frequency Analyi Fourier Tranform
Laplace Transformation
 Univerity of Technology Electromechanical Department Energy Branch Advance Mathematic Laplace Tranformation nd Cla Lecture 6 Page of 7 Laplace Tranformation Definition Suppoe that f(t) i a piecewie continuou
Univerity of Technology Electromechanical Department Energy Branch Advance Mathematic Laplace Tranformation nd Cla Lecture 6 Page of 7 Laplace Tranformation Definition Suppoe that f(t) i a piecewie continuou
Chapter 7: The Laplace Transform
 Chapter 7: The Laplace Tranform 王奕翔 Department of Electrical Engineering National Taiwan Univerity ihwang@ntu.edu.tw November 2, 213 1 / 25 王奕翔 DE Lecture 1 Solving an initial value problem aociated with
Chapter 7: The Laplace Tranform 王奕翔 Department of Electrical Engineering National Taiwan Univerity ihwang@ntu.edu.tw November 2, 213 1 / 25 王奕翔 DE Lecture 1 Solving an initial value problem aociated with
Digital Control System
 Digital Control Sytem - A D D A Micro ADC DAC Proceor Correction Element Proce Clock Meaurement A: Analog D: Digital Continuou Controller and Digital Control Rt - c Plant yt Continuou Controller Digital
Digital Control Sytem - A D D A Micro ADC DAC Proceor Correction Element Proce Clock Meaurement A: Analog D: Digital Continuou Controller and Digital Control Rt - c Plant yt Continuou Controller Digital
CHBE320 LECTURE V LAPLACE TRANSFORM AND TRANSFER FUNCTION. Professor Dae Ryook Yang
 CHBE3 ECTURE V APACE TRANSFORM AND TRANSFER FUNCTION Profeor Dae Ryook Yang Spring 8 Dept. of Chemical and Biological Engineering 5- Road Map of the ecture V aplace Tranform and Tranfer function Definition
CHBE3 ECTURE V APACE TRANSFORM AND TRANSFER FUNCTION Profeor Dae Ryook Yang Spring 8 Dept. of Chemical and Biological Engineering 5- Road Map of the ecture V aplace Tranform and Tranfer function Definition
MAE140 Linear Circuits Fall 2012 Final, December 13th
 MAE40 Linear Circuit Fall 202 Final, December 3th Intruction. Thi exam i open book. You may ue whatever written material you chooe, including your cla note and textbook. You may ue a hand calculator with
MAE40 Linear Circuit Fall 202 Final, December 3th Intruction. Thi exam i open book. You may ue whatever written material you chooe, including your cla note and textbook. You may ue a hand calculator with
arxiv: v2 [math.nt] 30 Apr 2015
![arxiv: v2 [math.nt] 30 Apr 2015](/thumbs/74/69750607.jpg "arxiv: v2 [math.nt] 30 Apr 2015") A THEOREM FOR DISTINCT ZEROS OF L-FUNCTIONS École Normale Supérieure arxiv:54.6556v [math.nt] 3 Apr 5 943 Cachan November 9, 7 Abtract In thi paper, we etablih a imple criterion for two L-function L and
A THEOREM FOR DISTINCT ZEROS OF L-FUNCTIONS École Normale Supérieure arxiv:54.6556v [math.nt] 3 Apr 5 943 Cachan November 9, 7 Abtract In thi paper, we etablih a imple criterion for two L-function L and
R. W. Erickson. Department of Electrical, Computer, and Energy Engineering University of Colorado, Boulder
 R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder Cloed-loop buck converter example: Section 9.5.4 In ECEN 5797, we ued the CCM mall ignal model to
R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder Cloed-loop buck converter example: Section 9.5.4 In ECEN 5797, we ued the CCM mall ignal model to
MA 266 FINAL EXAM INSTRUCTIONS May 2, 2005
 MA 66 FINAL EXAM INSTRUCTIONS May, 5 NAME INSTRUCTOR. You mut ue a # pencil on the mark ene heet anwer heet.. If the cover of your quetion booklet i GREEN, write in the TEST/QUIZ NUMBER boxe and blacken
MA 66 FINAL EXAM INSTRUCTIONS May, 5 NAME INSTRUCTOR. You mut ue a # pencil on the mark ene heet anwer heet.. If the cover of your quetion booklet i GREEN, write in the TEST/QUIZ NUMBER boxe and blacken
7 Minimal realization and coprime fraction
 7 Minimal realization and coprime fraction 7 Introduction If a tranfer function i realizable, what i the mallet poible dimenion? Realization with the mallet poible dimenion are called minimal-dimenional
7 Minimal realization and coprime fraction 7 Introduction If a tranfer function i realizable, what i the mallet poible dimenion? Realization with the mallet poible dimenion are called minimal-dimenional
5.5 Application of Frequency Response: Signal Filters
 44 Dynamic Sytem Second order lowpa filter having tranfer function H()=H ()H () u H () H () y Firt order lowpa filter Figure 5.5: Contruction of a econd order low-pa filter by combining two firt order
44 Dynamic Sytem Second order lowpa filter having tranfer function H()=H ()H () u H () H () y Firt order lowpa filter Figure 5.5: Contruction of a econd order low-pa filter by combining two firt order
EE/ME/AE324: Dynamical Systems. Chapter 8: Transfer Function Analysis
 EE/ME/AE34: Dynamical Sytem Chapter 8: Tranfer Function Analyi The Sytem Tranfer Function Conider the ytem decribed by the nth-order I/O eqn.: ( n) ( n 1) ( m) y + a y + + a y = b u + + bu n 1 0 m 0 Taking
EE/ME/AE34: Dynamical Sytem Chapter 8: Tranfer Function Analyi The Sytem Tranfer Function Conider the ytem decribed by the nth-order I/O eqn.: ( n) ( n 1) ( m) y + a y + + a y = b u + + bu n 1 0 m 0 Taking
Root Locus Diagram. Root loci: The portion of root locus when k assume positive values: that is 0
 Objective Root Locu Diagram Upon completion of thi chapter you will be able to: Plot the Root Locu for a given Tranfer Function by varying gain of the ytem, Analye the tability of the ytem from the root
Objective Root Locu Diagram Upon completion of thi chapter you will be able to: Plot the Root Locu for a given Tranfer Function by varying gain of the ytem, Analye the tability of the ytem from the root
Solutions. Digital Control Systems ( ) 120 minutes examination time + 15 minutes reading time at the beginning of the exam
 120 minutes examination time + 15 minutes reading time at the beginning of the exam") BSc - Sample Examination Digital Control Sytem (5-588-) Prof. L. Guzzella Solution Exam Duration: Number of Quetion: Rating: Permitted aid: minute examination time + 5 minute reading time at the beginning
BSc - Sample Examination Digital Control Sytem (5-588-) Prof. L. Guzzella Solution Exam Duration: Number of Quetion: Rating: Permitted aid: minute examination time + 5 minute reading time at the beginning
Modeling and Analysis of Systems Lecture #8 - Transfer Function. Guillaume Drion Academic year
 Modeling and Analysis of Systems Lecture #8 - Transfer Function Guillaume Drion Academic year 2015-2016 1 Input-output representation of LTI systems Can we mathematically describe a LTI system using the
Modeling and Analysis of Systems Lecture #8 - Transfer Function Guillaume Drion Academic year 2015-2016 1 Input-output representation of LTI systems Can we mathematically describe a LTI system using the
Lecture #9 Continuous time filter
 Lecture #9 Continuou time filter Oliver Faut December 5, 2006 Content Review. Motivation......................................... 2 2 Filter pecification 2 2. Low pa..........................................
Lecture #9 Continuou time filter Oliver Faut December 5, 2006 Content Review. Motivation......................................... 2 2 Filter pecification 2 2. Low pa..........................................
ME2142/ME2142E Feedback Control Systems
 Root Locu Analyi Root Locu Analyi Conider the cloed-loop ytem R + E - G C B H The tranient repone, and tability, of the cloed-loop ytem i determined by the value of the root of the characteritic equation
Root Locu Analyi Root Locu Analyi Conider the cloed-loop ytem R + E - G C B H The tranient repone, and tability, of the cloed-loop ytem i determined by the value of the root of the characteritic equation
The Laplace Transform
 Chapter 7 The Laplace Tranform 85 In thi chapter we will explore a method for olving linear differential equation with contant coefficient that i widely ued in electrical engineering. It involve the tranformation
Chapter 7 The Laplace Tranform 85 In thi chapter we will explore a method for olving linear differential equation with contant coefficient that i widely ued in electrical engineering. It involve the tranformation
EE Control Systems LECTURE 6
 Copyright FL Lewi 999 All right reerved EE - Control Sytem LECTURE 6 Updated: Sunday, February, 999 BLOCK DIAGRAM AND MASON'S FORMULA A linear time-invariant (LTI) ytem can be repreented in many way, including:
Copyright FL Lewi 999 All right reerved EE - Control Sytem LECTURE 6 Updated: Sunday, February, 999 BLOCK DIAGRAM AND MASON'S FORMULA A linear time-invariant (LTI) ytem can be repreented in many way, including:
The Laplace Transform
 The Laplace Transform Generalizing the Fourier Transform The CTFT expresses a time-domain signal as a linear combination of complex sinusoids of the form e jωt. In the generalization of the CTFT to the
The Laplace Transform Generalizing the Fourier Transform The CTFT expresses a time-domain signal as a linear combination of complex sinusoids of the form e jωt. In the generalization of the CTFT to the
SIGNALS AND SYSTEMS. Unit IV. Analysis of DT signals
 SIGNALS AND SYSTEMS Unit IV Analysis of DT signals Contents: 4.1 Discrete Time Fourier Transform 4.2 Discrete Fourier Transform 4.3 Z Transform 4.4 Properties of Z Transform 4.5 Relationship between Z
SIGNALS AND SYSTEMS Unit IV Analysis of DT signals Contents: 4.1 Discrete Time Fourier Transform 4.2 Discrete Fourier Transform 4.3 Z Transform 4.4 Properties of Z Transform 4.5 Relationship between Z
CHE302 LECTURE V LAPLACE TRANSFORM AND TRANSFER FUNCTION. Professor Dae Ryook Yang
 CHE3 ECTURE V APACE TRANSFORM AND TRANSFER FUNCTION Profeor Dae Ryook Yang Fall Dept. of Chemical and Biological Engineering Korea Univerity CHE3 Proce Dynamic and Control Korea Univerity 5- SOUTION OF
CHE3 ECTURE V APACE TRANSFORM AND TRANSFER FUNCTION Profeor Dae Ryook Yang Fall Dept. of Chemical and Biological Engineering Korea Univerity CHE3 Proce Dynamic and Control Korea Univerity 5- SOUTION OF
The Laplace Transform , Haynes Miller and Jeremy Orloff
 The Laplace Tranform 8.3, Hayne Miller and Jeremy Orloff Laplace tranform baic: introduction An operator take a function a input and output another function. A tranform doe the ame thing with the added
The Laplace Tranform 8.3, Hayne Miller and Jeremy Orloff Laplace tranform baic: introduction An operator take a function a input and output another function. A tranform doe the ame thing with the added
EXAM 4 -B2 MATH 261: Elementary Differential Equations MATH 261 FALL 2012 EXAMINATION COVER PAGE Professor Moseley
 EXAM 4 -B MATH 6: Elementary Differential Equation MATH 6 FALL 0 EXAMINATION COVER PAGE Profeor Moeley PRINT NAME ( ) Lat Name, Firt Name MI (What you wih to be called) ID # EXAM DATE Friday, Nov. 9, 0
EXAM 4 -B MATH 6: Elementary Differential Equation MATH 6 FALL 0 EXAMINATION COVER PAGE Profeor Moeley PRINT NAME ( ) Lat Name, Firt Name MI (What you wih to be called) ID # EXAM DATE Friday, Nov. 9, 0
Chapter 4. The Laplace Transform Method
 Chapter 4. The Laplace Tranform Method The Laplace Tranform i a tranformation, meaning that it change a function into a new function. Actually, it i a linear tranformation, becaue it convert a linear combination
Chapter 4. The Laplace Tranform Method The Laplace Tranform i a tranformation, meaning that it change a function into a new function. Actually, it i a linear tranformation, becaue it convert a linear combination
Chapter 13. Root Locus Introduction
 Chapter 13 Root Locu 13.1 Introduction In the previou chapter we had a glimpe of controller deign iue through ome imple example. Obviouly when we have higher order ytem, uch imple deign technique will
Chapter 13 Root Locu 13.1 Introduction In the previou chapter we had a glimpe of controller deign iue through ome imple example. Obviouly when we have higher order ytem, uch imple deign technique will
Design By Emulation (Indirect Method)
") Deign By Emulation (Indirect Method he baic trategy here i, that Given a continuou tranfer function, it i required to find the bet dicrete equivalent uch that the ignal produced by paing an input ignal
Deign By Emulation (Indirect Method he baic trategy here i, that Given a continuou tranfer function, it i required to find the bet dicrete equivalent uch that the ignal produced by paing an input ignal
March 18, 2014 Academic Year 2013/14
 POLITONG - SHANGHAI BASIC AUTOMATIC CONTROL Exam grade March 8, 4 Academic Year 3/4 NAME (Pinyin/Italian)... STUDENT ID Ue only thee page (including the back) for anwer. Do not ue additional heet. Ue of
POLITONG - SHANGHAI BASIC AUTOMATIC CONTROL Exam grade March 8, 4 Academic Year 3/4 NAME (Pinyin/Italian)... STUDENT ID Ue only thee page (including the back) for anwer. Do not ue additional heet. Ue of
信號與系統 Signals and Systems
 Spring 2013 Flowchart Introduction (Chap 1) LTI & Convolution (Chap 2) NTUEE-SS10-Z-2 信號與系統 Signals and Systems Chapter SS-10 The z-transform FS (Chap 3) Periodic Bounded/Convergent CT DT FT Aperiodic
Spring 2013 Flowchart Introduction (Chap 1) LTI & Convolution (Chap 2) NTUEE-SS10-Z-2 信號與系統 Signals and Systems Chapter SS-10 The z-transform FS (Chap 3) Periodic Bounded/Convergent CT DT FT Aperiodic
Exercises for lectures 19 Polynomial methods
 Exercie for lecture 19 Polynomial method Michael Šebek Automatic control 016 15-4-17 Diviion of polynomial with and without remainder Polynomial form a circle, but not a body. (Circle alo form integer,
Exercie for lecture 19 Polynomial method Michael Šebek Automatic control 016 15-4-17 Diviion of polynomial with and without remainder Polynomial form a circle, but not a body. (Circle alo form integer,
Name: Solutions Exam 3
 Intruction. Anwer each of the quetion on your own paper. Put your name on each page of your paper. Be ure to how your work o that partial credit can be adequately aeed. Credit will not be given for anwer
Intruction. Anwer each of the quetion on your own paper. Put your name on each page of your paper. Be ure to how your work o that partial credit can be adequately aeed. Credit will not be given for anwer
Function and Impulse Response
 Tranfer Function and Impule Repone Solution of Selected Unolved Example. Tranfer Function Q.8 Solution : The -domain network i hown in the Fig... Applying VL to the two loop, R R R I () I () L I () L V()
Tranfer Function and Impule Repone Solution of Selected Unolved Example. Tranfer Function Q.8 Solution : The -domain network i hown in the Fig... Applying VL to the two loop, R R R I () I () L I () L V()
Eigenvalues and Eigenvectors - 5.1/ Determine if pairs 1,
 Eigenvalue and Eigenvector - 5./5.. Definition Definition An eigenvector of an n n matrix A i a nonzero vector x uch that Ax x for ome calar. A calar i called an eigenvalue of A if there i a nontrivial
Eigenvalue and Eigenvector - 5./5.. Definition Definition An eigenvector of an n n matrix A i a nonzero vector x uch that Ax x for ome calar. A calar i called an eigenvalue of A if there i a nontrivial
The Continuous-time Fourier
 The Continuous-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals:
The Continuous-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals:
EXAM 4 -A2 MATH 261: Elementary Differential Equations MATH 261 FALL 2010 EXAMINATION COVER PAGE Professor Moseley
 EXAM 4 -A MATH 6: Elementary Differential Equation MATH 6 FALL 00 EXAMINATION COVER PAGE Profeor Moeley PRINT NAME ( ) Lat Name, Firt Name MI (What you wih to be called) ID # EXAM DATE Friday, Nov. 9,
EXAM 4 -A MATH 6: Elementary Differential Equation MATH 6 FALL 00 EXAMINATION COVER PAGE Profeor Moeley PRINT NAME ( ) Lat Name, Firt Name MI (What you wih to be called) ID # EXAM DATE Friday, Nov. 9,
Chapter 7: The z-transform
 Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
Chapter 7. Root Locus Analysis
 Chapter 7 Root Locu Analyi jw + KGH ( ) GH ( ) - K 0 z O 4 p 2 p 3 p Root Locu Analyi The root of the cloed-loop characteritic equation define the ytem characteritic repone. Their location in the complex
Chapter 7 Root Locu Analyi jw + KGH ( ) GH ( ) - K 0 z O 4 p 2 p 3 p Root Locu Analyi The root of the cloed-loop characteritic equation define the ytem characteritic repone. Their location in the complex
(i) Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform
 Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform") z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
Lecture 5 Frequency Response of FIR Systems (III)
") EE3054 Signal and Sytem Lecture 5 Frequency Repone of FIR Sytem (III Yao Wang Polytechnic Univerity Mot of the lide included are extracted from lecture preentation prepared by McClellan and Schafer Licene
EE3054 Signal and Sytem Lecture 5 Frequency Repone of FIR Sytem (III Yao Wang Polytechnic Univerity Mot of the lide included are extracted from lecture preentation prepared by McClellan and Schafer Licene
Fair Game Review. Chapter 7 A B C D E Name Date. Complete the number sentence with <, >, or =
 Name Date Chapter 7 Fair Game Review Complete the number entence with , or =. 1. 3.4 3.45 2. 6.01 6.1 3. 3.50 3.5 4. 0.84 0.91 Find three decimal that make the number entence true. 5. 5.2 6. 2.65 >
Name Date Chapter 7 Fair Game Review Complete the number entence with , or =. 1. 3.4 3.45 2. 6.01 6.1 3. 3.50 3.5 4. 0.84 0.91 Find three decimal that make the number entence true. 5. 5.2 6. 2.65 >
Laplace Transforms and use in Automatic Control
 Laplace Transforms and use in Automatic Control P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: P.Santosh Krishna, SYSCON Recap Fourier series Fourier transform: aperiodic Convolution integral
Laplace Transforms and use in Automatic Control P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: P.Santosh Krishna, SYSCON Recap Fourier series Fourier transform: aperiodic Convolution integral
UNIT-II Z-TRANSFORM. This expression is also called a one sided z-transform. This non causal sequence produces positive powers of z in X (z).
.") Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 30 Signal & Syem Prof. ark Fowler oe Se #34 C-T Tranfer Funcion and Frequency Repone /4 Finding he Tranfer Funcion from Differenial Eq. Recall: we found a DT yem Tranfer Funcion Hz y aking he ZT of
EECE 30 Signal & Syem Prof. ark Fowler oe Se #34 C-T Tranfer Funcion and Frequency Repone /4 Finding he Tranfer Funcion from Differenial Eq. Recall: we found a DT yem Tranfer Funcion Hz y aking he ZT of
TMA4125 Matematikk 4N Spring 2016
 Norwegian Univerity of Science and Technology Department of Mathematical Science TMA45 Matematikk 4N Spring 6 Solution to problem et 6 In general, unle ele i noted, if f i a function, then F = L(f denote
Norwegian Univerity of Science and Technology Department of Mathematical Science TMA45 Matematikk 4N Spring 6 Solution to problem et 6 In general, unle ele i noted, if f i a function, then F = L(f denote
Invariance of a Partial Differential Equation of Fractional Order under the Lie Group of Scaling Transformations
 JOURNAL OF MATHEMATICAL ANALYSIS AND APPLICATIONS 7, 8197 1998 ARTICLE NO AY986078 Invariance of a Partial Differential Equation of Fractional Order under the Lie Group of Scaling Tranformation Evelyn
JOURNAL OF MATHEMATICAL ANALYSIS AND APPLICATIONS 7, 8197 1998 ARTICLE NO AY986078 Invariance of a Partial Differential Equation of Fractional Order under the Lie Group of Scaling Tranformation Evelyn
Midterm Test Nov 10, 2010 Student Number:
 Mathematic 265 Section: 03 Verion A Full Name: Midterm Tet Nov 0, 200 Student Number: Intruction: There are 6 page in thi tet (including thi cover page).. Caution: There may (or may not) be more than one
Mathematic 265 Section: 03 Verion A Full Name: Midterm Tet Nov 0, 200 Student Number: Intruction: There are 6 page in thi tet (including thi cover page).. Caution: There may (or may not) be more than one
Properties of Z-transform Transform 1 Linearity a
 Midterm 3 (Fall 6 of EEG:. Thi midterm conit of eight ingle-ided page. The firt three page contain variou table followed by FOUR eam quetion and one etra workheet. You can tear out any page but make ure
Midterm 3 (Fall 6 of EEG:. Thi midterm conit of eight ingle-ided page. The firt three page contain variou table followed by FOUR eam quetion and one etra workheet. You can tear out any page but make ure
Chapter 3 : Transfer Functions Block Diagrams Signal Flow Graphs
 Chapter 3 : Tranfer Function Block Diagram Signal Flow Graph 3.. Tranfer Function 3.. Block Diagram of Control Sytem 3.3. Signal Flow Graph 3.4. Maon Gain Formula 3.5. Example 3.6. Block Diagram to Signal
Chapter 3 : Tranfer Function Block Diagram Signal Flow Graph 3.. Tranfer Function 3.. Block Diagram of Control Sytem 3.3. Signal Flow Graph 3.4. Maon Gain Formula 3.5. Example 3.6. Block Diagram to Signal
MM1: Basic Concept (I): System and its Variables
: System and its Variables") MM1: Baic Concept (I): Sytem and it Variable A ytem i a collection of component which are coordinated together to perform a function Sytem interact with their environment. The interaction i defined in
MM1: Baic Concept (I): Sytem and it Variable A ytem i a collection of component which are coordinated together to perform a function Sytem interact with their environment. The interaction i defined in
ECE-202 Exam 1 January 31, Name: (Please print clearly.) CIRCLE YOUR DIVISION DeCarlo DeCarlo 7:30 MWF 1:30 TTH
 CIRCLE YOUR DIVISION DeCarlo DeCarlo 7:30 MWF 1:30 TTH") ECE-0 Exam January 3, 08 Name: (Pleae print clearly.) CIRCLE YOUR DIVISION 0 0 DeCarlo DeCarlo 7:30 MWF :30 TTH INSTRUCTIONS There are multiple choice worth 5 point each and workout problem worth 40 point.
ECE-0 Exam January 3, 08 Name: (Pleae print clearly.) CIRCLE YOUR DIVISION 0 0 DeCarlo DeCarlo 7:30 MWF :30 TTH INSTRUCTIONS There are multiple choice worth 5 point each and workout problem worth 40 point.
Pikeville Independent Schools [ALGEBRA 1 CURRICULUM MAP ]
![Pikeville Independent Schools [ALGEBRA 1 CURRICULUM MAP ]](/thumbs/86/93792363.jpg "Pikeville Independent Schools [ALGEBRA 1 CURRICULUM MAP ]") Pikeville Independent School [ALGEBRA 1 CURRICULUM MAP 20162017] Augut X X X 11 12 15 16 17 18 19 22 23 24 25 26 12 37 8 12 29 30 31 13 15 September 1 2 X 6 7 8 9 16 17 18 21 PreAlgebra Review Algebra
Pikeville Independent School [ALGEBRA 1 CURRICULUM MAP 20162017] Augut X X X 11 12 15 16 17 18 19 22 23 24 25 26 12 37 8 12 29 30 31 13 15 September 1 2 X 6 7 8 9 16 17 18 21 PreAlgebra Review Algebra
System models. We look at LTI systems for the time being Time domain models
 Stem moel We look at LTI tem for the time being Time omain moel High orer orinar ifferential equation moel Contain onl input variable, output variable, their erivative, an contant parameter Proper: highet
Stem moel We look at LTI tem for the time being Time omain moel High orer orinar ifferential equation moel Contain onl input variable, output variable, their erivative, an contant parameter Proper: highet
5.5 Sampling. The Connection Between: Continuous Time & Discrete Time
 5.5 Sampling he Connection Between: Continuou ime & Dicrete ime Warning: I don t really like how the book cover thi! It i not that it i wrong it jut ail to make the correct connection between the mathematic
5.5 Sampling he Connection Between: Continuou ime & Dicrete ime Warning: I don t really like how the book cover thi! It i not that it i wrong it jut ail to make the correct connection between the mathematic
CONTROL SYSTEMS. Chapter 2 : Block Diagram & Signal Flow Graphs GATE Objective & Numerical Type Questions
 ONTOL SYSTEMS hapter : Bloc Diagram & Signal Flow Graph GATE Objective & Numerical Type Quetion Quetion 6 [Practice Boo] [GATE E 994 IIT-Kharagpur : 5 Mar] educe the ignal flow graph hown in figure below,
ONTOL SYSTEMS hapter : Bloc Diagram & Signal Flow Graph GATE Objective & Numerical Type Quetion Quetion 6 [Practice Boo] [GATE E 994 IIT-Kharagpur : 5 Mar] educe the ignal flow graph hown in figure below,
Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals
 Understanding the relationship between transform and the Fourier transform for discrete-time signals") z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuits II. R 4 := 100 kohm
 SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2003. Cacaded Op Amp [DC&L, problem 4.29] An ideal op amp ha an output impedance of zero,
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2003. Cacaded Op Amp [DC&L, problem 4.29] An ideal op amp ha an output impedance of zero,
APPENDIX 2 LAPLACE TRANSFORMS
 APPENDIX LAPLACE TRANSFORMS Thi ppendix preent hort introduction to Lplce trnform, the bic tool ued in nlyzing continuou ytem in the frequency domin. The Lplce trnform convert liner ordinry differentil
APPENDIX LAPLACE TRANSFORMS Thi ppendix preent hort introduction to Lplce trnform, the bic tool ued in nlyzing continuou ytem in the frequency domin. The Lplce trnform convert liner ordinry differentil
Automatic Control Systems. Part III: Root Locus Technique
 www.pdhcenter.com PDH Coure E40 www.pdhonline.org Automatic Control Sytem Part III: Root Locu Technique By Shih-Min Hu, Ph.D., P.E. Page of 30 www.pdhcenter.com PDH Coure E40 www.pdhonline.org VI. Root
www.pdhcenter.com PDH Coure E40 www.pdhonline.org Automatic Control Sytem Part III: Root Locu Technique By Shih-Min Hu, Ph.D., P.E. Page of 30 www.pdhcenter.com PDH Coure E40 www.pdhonline.org VI. Root
Correction for Simple System Example and Notes on Laplace Transforms / Deviation Variables ECHE 550 Fall 2002
 Correction for Simple Sytem Example and Note on Laplace Tranform / Deviation Variable ECHE 55 Fall 22 Conider a tank draining from an initial height of h o at time t =. With no flow into the tank (F in
Correction for Simple Sytem Example and Note on Laplace Tranform / Deviation Variable ECHE 55 Fall 22 Conider a tank draining from an initial height of h o at time t =. With no flow into the tank (F in
Signals and Systems Lecture 8: Z Transform
 Signals and Systems Lecture 8: Z Transform Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 Farzaneh Abdollahi Signal and Systems Lecture 8 1/29 Introduction
Signals and Systems Lecture 8: Z Transform Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 Farzaneh Abdollahi Signal and Systems Lecture 8 1/29 Introduction
DIFFERENTIAL EQUATIONS
 DIFFERENTIAL EQUATIONS Laplace Tranform Paul Dawkin Table of Content Preface... Laplace Tranform... Introduction... The Definition... 5 Laplace Tranform... 9 Invere Laplace Tranform... Step Function...4
DIFFERENTIAL EQUATIONS Laplace Tranform Paul Dawkin Table of Content Preface... Laplace Tranform... Introduction... The Definition... 5 Laplace Tranform... 9 Invere Laplace Tranform... Step Function...4
What lies between Δx E, which represents the steam valve, and ΔP M, which is the mechanical power into the synchronous machine?
 A 2.0 Introduction In the lat et of note, we developed a model of the peed governing mechanim, which i given below: xˆ K ( Pˆ ˆ) E () In thee note, we want to extend thi model o that it relate the actual
A 2.0 Introduction In the lat et of note, we developed a model of the peed governing mechanim, which i given below: xˆ K ( Pˆ ˆ) E () In thee note, we want to extend thi model o that it relate the actual
A Simple Approach to Synthesizing Naïve Quantized Control for Reference Tracking
 A Simple Approach to Syntheizing Naïve Quantized Control for Reference Tracking SHIANG-HUA YU Department of Electrical Engineering National Sun Yat-Sen Univerity 70 Lien-Hai Road, Kaohiung 804 TAIAN Abtract:
A Simple Approach to Syntheizing Naïve Quantized Control for Reference Tracking SHIANG-HUA YU Department of Electrical Engineering National Sun Yat-Sen Univerity 70 Lien-Hai Road, Kaohiung 804 TAIAN Abtract: