Let. x y. denote a bivariate time series with zero mean.
|
|
|
- Clifton Lester
- 6 years ago
- Views:
Transcription
1 Linear Filer
2 Le x y : T denoe a bivariae ime erie wih zero mean.
3 Suppoe ha he ime erie {y : T} i conruced a follow: y a x The ime erie {y : T} i aid o be conruced from {x : T} by mean of a Linear Filer.
4 Schemaic Diagram of a Linear Filer X Inpu Proce Linear Filer Y Oupu Proce
5 h yy h a a ' ' ' d f e a e i h i d f A e h i The auocovariance funcion of he filered erie
6 Thu he pecral deniy of he ime erie {y : T} i: f yy i a e f A f
7 Commen A: A a e i i called he Tranfer funcion of he linear filer. A i called he Gain of he filer while arg A i called he Phae Shif of he filer.
8 Alo h xy y x E h h a d f A e h i
9 Thu cro pecrum of he bivariae ime erie T y x : i: i xy f A f e f a
10 Definiion: K ij f ii f ij f jj = Squared Coherency funcion Noe: K ij
11 Commen : K xy f f xy f yy = Squared Coherency funcion. f A f A f if {y : T} i conruced from {x : T} by mean of a linear filer
12 Linear Filer wih addiive noie a he oupu
13 denoe a bivariae ime erie wih zero mean. Le =..., -, -,,,,... T y x : Suppoe ha he ime erie {y : T} i conruced a follow: v x a y The noie {v : T} i independen of he erie {x : T} (may be whie)
14 Schemaic Diagram of a Linear Filer wih Noie X Inpu Proce Linear Filer Y Oupu Proce N Addiive Noie a Oupu
15 h yy y y E h h h a a vv ' ' ' d f e d f e a e vv h i i h i The auocovariance funcion of he filered erie wih added noie
16 coninuing h ih e A f f yy where A a e vv i d Thu he pecral deniy of he ime erie {y : T} i: f yy A f f vv
17 Alo h xy y x E h h a d f e a h i d f A e h i
18 Thu cro pecrum of he bivariae ime erie T y x : i: i xy f A f e f a
19 Thu K xy f f xy f yy = Squared Coherency funcion. f A f A f f A f vv f vv Noie o Signal Raio
20 ox-jenkin Parameric Modelling of a Linear Filer
21 Conider he Linear Filer of he ime erie {X : T}: Y a X a X where a a and A i a e a e i = he Tranfer funcion of he filer.
22 {a : T} i called he impule repone funcion of he filer ince if X =and X = for, hen : Y a X a for T X a Linear Filer
23 Alo Noe: X a X a Y Y Y X X a a X
24 Hence {Y } and {X } are relaed by he ame Linear Filer. Definiion The Linear Filer Y a X i aid o be able if : a X a a converge for all.
25 Dicree Dynamic Model:
26 Many phyical yem whoe oupu i repreened by Y() are modeled by he following differenial equaion: I d d... r d d d d r r Y I d d d d... d d Where X() i he forcing funcion. X
27 If X and Y are meaured a dicree ime hi equaion can be replaced by: I... r r Y I... X b where = I- denoe he differencing operaor.
28 Thi equaion can in urn be repreened wih he operaor. r r Y I... b X I... b X I... or X Y b b b b... where
29 Thi equaion can alo be wrien in he form a a Linear filer a Y X a X Sabiliy: I can eaily be hown ha hi filer i able if he roo of (x) = lie ouide he uni circle.
30 Deermining he Impule Repone funcion from he Parameer of he Filer:
31 Now a or a Hence a a I a I r r b b b b...
32 Equaing coefficien reul in he following concluion: a j = for j < b. a j - a j- - a j r a j-r = j or a j = j- + a j r a j-r + j for b j b+. and a j - a j- - a j r a j-r = or a j = a j- + a j r a j-r for j > b+.
33 Thu he coefficien of he ranfer funcion, a, a, a,..., aify he following properie ) b zeroe a, a, a,..., a b- ) No paern for he nex -r+ value a b, a b+, a b+,..., a b+-r 3) The remaining value a b+-r+, a b+-r+, a b+-r+3,... follow he paern of an r h order difference equaion a j = a j- + a j r a j-r
34 Example r =, =, b=3, = a = a = a = a 3 = a + = a 4 = a 3 + = + a 5 = a 4 + = [ + ] + = w + + a j = a j- for j 6.
35 Tranfer funcion {a }
36 Idenificaion of he ox-jenkin Tranfer Model wih r=
37 Recall he oluion o he econd order difference equaion a j = a j- + a j- follow he following paern: ) Mixure of exponenial if he roo of - x - x = are real. ) Damped Coine wave if he roo o - x - x = are complex. Thee are he paern of he Impule Repone funcion one look for when idenifying b,r and.
38 Eimaion of he Impule Repone funcion, a j (wihou pre-whiening).
39 Suppoe ha {Y : T} and {X : T}are weakly aionary ime erie aifying he following equaion: N X a Y Alo aume ha {N : T} i a weakly aionary "noie" ime erie, uncorrelaed wih {X : T}. Then h h XY N X a X E X Y E h
40 Suppoe ha for > M, a =. Then a, a,...,a M can be found olving he following equaion: h N X E X X E a h a
41 xy xy xy a a a M a a a M M a M a M a If he Cro auocovariance funcion, XY (h), and he Auocovariance funcion, XX (h), are unknown hey can be replaced by heir ample eimae C XY (h) and C XX (h), yeilding eimae of he implue repone funcion aˆ, aˆ,, ˆ M M M a M
42 In marix noaion hi e of linear equaion can be wrien: M xy xy xy a a a M M M M M
43 If he Cro auocovariance funcion, XY (h), and he Auocovariance funcion, XX (h), are unknown hey can be replaced by heir ample eimae C XY (h) and C XX (h), yeilding eimae of he implue repone funcion C C C xy xy xy aˆ C aˆ C aˆ C M aˆ C aˆ C aˆ C M M aˆ C M aˆ C M aˆ C M M ˆ aˆ,, a M, ˆ a M
44 Eimaion of he Impule Repone funcion, a j (wih pre-whiening).
45 Suppoe ha {Y : T} and {X : T}are weakly aionary ime erie aifying he following equaion: Y a Alo aume ha {N : T} i a weakly aionary "noie" ime erie, uncorrelaed wih {X : T}. X N
46 In addiion aume ha {X : T}, he weakly aionary ime erie ha been idenified a an ARMA(p,q) erie, eimaed and found o aify he following equaion: ()X = ()u where {u : T} i a whie noie ime erie. Then [()] - ()X = u ranform he Time erie {X : T} ino he whie noie ime erie{u : T}.
47 Thi proce i called Pre-whiening he Inpu erie. Applying hi ranformaion o he Oupu erie {Y : T} yeild: Y ) ( )] ( [ N X a ) ( )] ( [ ) ( )] ( [
48 or y a u n where y ) [ ( )] ( Y and n ) [ ( )] ( N
49 In hi cae he equaion for he impule repone funcion - a, a,...,a M - become (auming ha for > M, a = ): uy uy uy a a uu M a M uu uu or a k uy uu k and aˆ k C C uy uu k
50 Summary Idenificaion and Eimaion of ox-jenkin ranfer model
51 To idenify he erie we need o deermine b, r and. The fir ep i o compue. he ACF and he cro CF C (h) and C xy (h). Eimae he impule repone funcion uing C C C xy xy xy aˆ C aˆ C aˆ C M aˆ C aˆ C aˆ C M M aˆ C M aˆ C M aˆ C M M M
52 3. Deermine he value of b, r and from he paern of he impule repone funcion The Impule repone funcion {a } b - r + Paern of an r h order difference equaion
53 3. Deermine preliminary eimae of he ox- Jenkin ranfer funcion parameer uing: i. for j > b+.. ii. a j = a j- + a j r a j-r for b j b+ a j = j- + a j r a j-r + j 4. Deermine preliminary eimae of he ARMA parameer of he inpu ime erie {x }
54 5. Deermine preliminary eimae of he ARIMA parameer of he noie ime erie { } b y x b y x y y y r r xbxb xb y y y x x x r r b b b
55 Maximum Likelihood eimaion of he parameer of he ox-jenkin Tranfer funcion model
56 The ox- Jenkin model i wrien y a x a x b x r where I... r and I... The parameer of he model are:,,..., r and,,,..., In addiion. he ARMA parameer of he inpu erie {x }. The ARIMA parameer of he noie erie { }
57 The model for he noie { }erie can be wrien u p where I... q and I... q p
58 Given aring value for {y }, {x }, and x, y and u u and he parameer of he ranfer funcion model and he noie model δωβ, and α We can calculae ucceively: u u δωβ,, α, x, y, u The maximum likelihood eimae are he value ˆ ˆ δωβ, ˆ and αˆ ha minimize: S δωβ,, α u
59 Fiing a ranfer funcion model Example: Monhly Sale (Y) and Monhly Adveriing expendiure
60 The Daa Mon Adver Sale Mon Adver Sale Mon Adver Sale Mon Adver Sale
61 Uing SAS Available in he Ar compuer lab

62 The Sar up window for SAS


63 To impor daa - Chooe File -> Impor daa

64 The following window appear

65 rowe for he file o be impored
66 Idenify he file in SAS
67 The nex creen (no imporan) click Finih

68 The finihing creen
69 You can now run analyi by yping code ino he Edi window or elecing he analyi form he menu To fi a ranfer funcion model we need o idenify he model Deermine he order of differencing o achieve Saionariy Deermine he value of b, r and.
70 To deermine he degree of differencing we look a ACF and PACF for variou order of differencing


71 To produce he ACF, PACF ype he following command ino he Edior window- Pre Run buon
72 To idenify he ranfer funcion model we need o eimae he impule repone funcion uing: C C C xy xy xy aˆ C aˆ C aˆ C M aˆ C aˆ C aˆ C M M aˆ C M aˆ C M aˆ C For hi we need he ACF of he inpu erie and he cro ACF of he inpu wih he oupu M M M
73 To produce he Cro correlaion funcion ype he following command ino he Edior window
74 he impule repone funcion uing can be deermined uing ome oher package (i.e. Excel) 8 r, = b =

75 To Eimae he ranfer funcion model ype he following command ino he Edior window
76 To eimae he following model b y x where I... r and I... Ue inpu=( b $ ( -lag ) / ( -lag) x) In SAS and... r

77 The Oupu
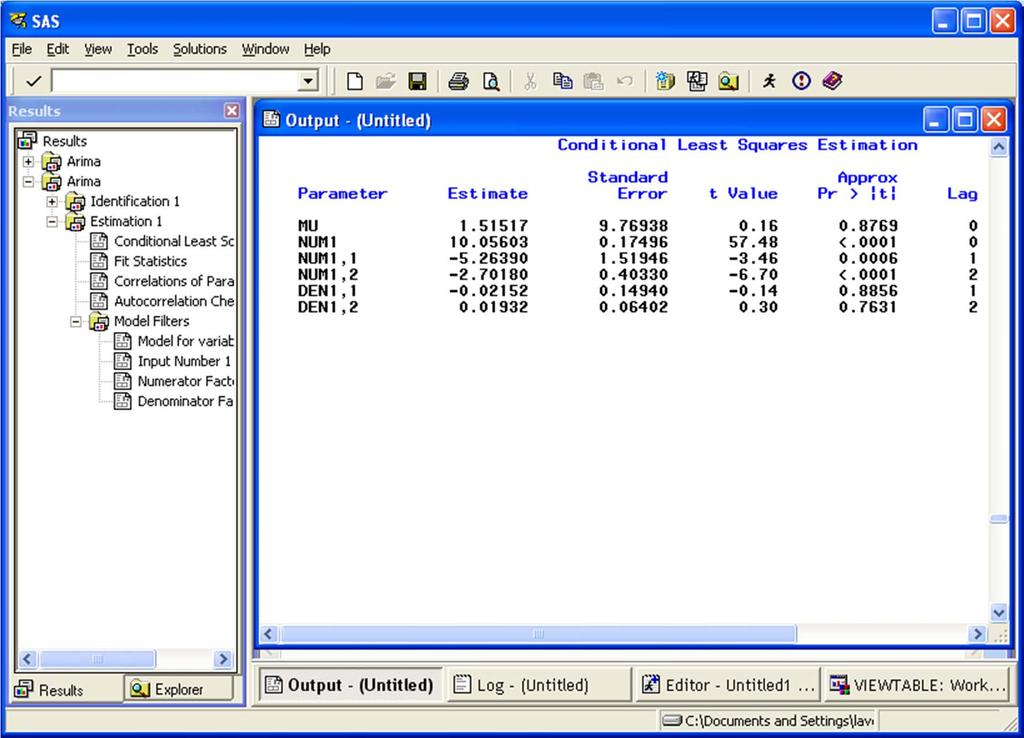
78 The Oupu
, the. L and the L. x x. max. i n. It is easy to show that these two norms satisfy the following relation: x x n x = (17.3) max
 max") ecure 8 7. Sabiliy Analyi For an n dimenional vecor R n, he and he vecor norm are defined a: = T = i n i (7.) I i eay o how ha hee wo norm aify he following relaion: n (7.) If a vecor i ime-dependen, hen
ecure 8 7. Sabiliy Analyi For an n dimenional vecor R n, he and he vecor norm are defined a: = T = i n i (7.) I i eay o how ha hee wo norm aify he following relaion: n (7.) If a vecor i ime-dependen, hen
u(t) Figure 1. Open loop control system
 Figure 1. Open loop control system") Open loop conrol v cloed loop feedbac conrol The nex wo figure preen he rucure of open loop and feedbac conrol yem Figure how an open loop conrol yem whoe funcion i o caue he oupu y o follow he reference
Open loop conrol v cloed loop feedbac conrol The nex wo figure preen he rucure of open loop and feedbac conrol yem Figure how an open loop conrol yem whoe funcion i o caue he oupu y o follow he reference
To become more mathematically correct, Circuit equations are Algebraic Differential equations. from KVL, KCL from the constitutive relationship
 Laplace Tranform (Lin & DeCarlo: Ch 3) ENSC30 Elecric Circui II The Laplace ranform i an inegral ranformaion. I ranform: f ( ) F( ) ime variable complex variable From Euler > Lagrange > Laplace. Hence,
Laplace Tranform (Lin & DeCarlo: Ch 3) ENSC30 Elecric Circui II The Laplace ranform i an inegral ranformaion. I ranform: f ( ) F( ) ime variable complex variable From Euler > Lagrange > Laplace. Hence,
Sample Final Exam (finals03) Covering Chapters 1-9 of Fundamentals of Signals & Systems
 Covering Chapters 1-9 of Fundamentals of Signals & Systems") Sample Final Exam Covering Chaper 9 (final04) Sample Final Exam (final03) Covering Chaper 9 of Fundamenal of Signal & Syem Problem (0 mar) Conider he caual opamp circui iniially a re depiced below. I LI
Sample Final Exam Covering Chaper 9 (final04) Sample Final Exam (final03) Covering Chaper 9 of Fundamenal of Signal & Syem Problem (0 mar) Conider he caual opamp circui iniially a re depiced below. I LI
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 31 Signal & Syem Prof. Mark Fowler Noe Se #27 C-T Syem: Laplace Tranform Power Tool for yem analyi Reading Aignmen: Secion 6.1 6.3 of Kamen and Heck 1/18 Coure Flow Diagram The arrow here how concepual
EECE 31 Signal & Syem Prof. Mark Fowler Noe Se #27 C-T Syem: Laplace Tranform Power Tool for yem analyi Reading Aignmen: Secion 6.1 6.3 of Kamen and Heck 1/18 Coure Flow Diagram The arrow here how concepual
Stationary Time Series
 3-Jul-3 Time Series Analysis Assoc. Prof. Dr. Sevap Kesel July 03 Saionary Time Series Sricly saionary process: If he oin dis. of is he same as he oin dis. of ( X,... X n) ( X h,... X nh) Weakly Saionary
3-Jul-3 Time Series Analysis Assoc. Prof. Dr. Sevap Kesel July 03 Saionary Time Series Sricly saionary process: If he oin dis. of is he same as he oin dis. of ( X,... X n) ( X h,... X nh) Weakly Saionary
CONTROL SYSTEMS. Chapter 3 Mathematical Modelling of Physical Systems-Laplace Transforms. Prof.Dr. Fatih Mehmet Botsalı
 CONTROL SYSTEMS Chaper Mahemaical Modelling of Phyical Syem-Laplace Tranform Prof.Dr. Faih Mehme Boalı Definiion Tranform -- a mahemaical converion from one way of hinking o anoher o make a problem eaier
CONTROL SYSTEMS Chaper Mahemaical Modelling of Phyical Syem-Laplace Tranform Prof.Dr. Faih Mehme Boalı Definiion Tranform -- a mahemaical converion from one way of hinking o anoher o make a problem eaier
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 30 Signal & Syem Prof. ark Fowler oe Se #34 C-T Tranfer Funcion and Frequency Repone /4 Finding he Tranfer Funcion from Differenial Eq. Recall: we found a DT yem Tranfer Funcion Hz y aking he ZT of
EECE 30 Signal & Syem Prof. ark Fowler oe Se #34 C-T Tranfer Funcion and Frequency Repone /4 Finding he Tranfer Funcion from Differenial Eq. Recall: we found a DT yem Tranfer Funcion Hz y aking he ZT of
18.03SC Unit 3 Practice Exam and Solutions
 Sudy Guide on Sep, Dela, Convoluion, Laplace You can hink of he ep funcion u() a any nice mooh funcion which i for < a and for > a, where a i a poiive number which i much maller han any ime cale we care
Sudy Guide on Sep, Dela, Convoluion, Laplace You can hink of he ep funcion u() a any nice mooh funcion which i for < a and for > a, where a i a poiive number which i much maller han any ime cale we care
CONTROL SYSTEMS. Chapter 10 : State Space Response
 CONTROL SYSTEMS Chaper : Sae Space Repone GATE Objecive & Numerical Type Soluion Queion 5 [GATE EE 99 IIT-Bombay : Mark] Conider a econd order yem whoe ae pace repreenaion i of he form A Bu. If () (),
CONTROL SYSTEMS Chaper : Sae Space Repone GATE Objecive & Numerical Type Soluion Queion 5 [GATE EE 99 IIT-Bombay : Mark] Conider a econd order yem whoe ae pace repreenaion i of he form A Bu. If () (),
Exponential Sawtooth
 ECPE 36 HOMEWORK 3: PROPERTIES OF THE FOURIER TRANSFORM SOLUTION. Exponenial Sawooh: The eaie way o do hi problem i o look a he Fourier ranform of a ingle exponenial funcion, () = exp( )u(). From he able
ECPE 36 HOMEWORK 3: PROPERTIES OF THE FOURIER TRANSFORM SOLUTION. Exponenial Sawooh: The eaie way o do hi problem i o look a he Fourier ranform of a ingle exponenial funcion, () = exp( )u(). From he able
Chapter 7: Inverse-Response Systems
 Chaper 7: Invere-Repone Syem Normal Syem Invere-Repone Syem Baic Sar ou in he wrong direcion End up in he original eady-ae gain value Two or more yem wih differen magniude and cale in parallel Main yem
Chaper 7: Invere-Repone Syem Normal Syem Invere-Repone Syem Baic Sar ou in he wrong direcion End up in he original eady-ae gain value Two or more yem wih differen magniude and cale in parallel Main yem
Chapter 6. Laplace Transforms
 Chaper 6. Laplace Tranform Kreyzig by YHLee;45; 6- An ODE i reduced o an algebraic problem by operaional calculu. The equaion i olved by algebraic manipulaion. The reul i ranformed back for he oluion of
Chaper 6. Laplace Tranform Kreyzig by YHLee;45; 6- An ODE i reduced o an algebraic problem by operaional calculu. The equaion i olved by algebraic manipulaion. The reul i ranformed back for he oluion of
STAD57 Time Series Analysis. Lecture 17
 STAD57 Time Series Analysis Lecure 17 1 Exponenially Weighed Moving Average Model Consider ARIMA(0,1,1), or IMA(1,1), model 1 s order differences follow MA(1) X X W W Y X X W W 1 1 1 1 Very common model
STAD57 Time Series Analysis Lecure 17 1 Exponenially Weighed Moving Average Model Consider ARIMA(0,1,1), or IMA(1,1), model 1 s order differences follow MA(1) X X W W Y X X W W 1 1 1 1 Very common model
STAD57 Time Series Analysis. Lecture 17
 STAD57 Time Series Analysis Lecure 17 1 Exponenially Weighed Moving Average Model Consider ARIMA(0,1,1), or IMA(1,1), model 1 s order differences follow MA(1) X X W W Y X X W W 1 1 1 1 Very common model
STAD57 Time Series Analysis Lecure 17 1 Exponenially Weighed Moving Average Model Consider ARIMA(0,1,1), or IMA(1,1), model 1 s order differences follow MA(1) X X W W Y X X W W 1 1 1 1 Very common model
13.1 Circuit Elements in the s Domain Circuit Analysis in the s Domain The Transfer Function and Natural Response 13.
 Chaper 3 The Laplace Tranform in Circui Analyi 3. Circui Elemen in he Domain 3.-3 Circui Analyi in he Domain 3.4-5 The Tranfer Funcion and Naural Repone 3.6 The Tranfer Funcion and he Convoluion Inegral
Chaper 3 The Laplace Tranform in Circui Analyi 3. Circui Elemen in he Domain 3.-3 Circui Analyi in he Domain 3.4-5 The Tranfer Funcion and Naural Repone 3.6 The Tranfer Funcion and he Convoluion Inegral
Design of Controller for Robot Position Control
 eign of Conroller for Robo oiion Conrol Two imporan goal of conrol: 1. Reference inpu racking: The oupu mu follow he reference inpu rajecory a quickly a poible. Se-poin racking: Tracking when he reference
eign of Conroller for Robo oiion Conrol Two imporan goal of conrol: 1. Reference inpu racking: The oupu mu follow he reference inpu rajecory a quickly a poible. Se-poin racking: Tracking when he reference
EE Control Systems LECTURE 2
 Copyrigh F.L. Lewi 999 All righ reerved EE 434 - Conrol Syem LECTURE REVIEW OF LAPLACE TRANSFORM LAPLACE TRANSFORM The Laplace ranform i very ueful in analyi and deign for yem ha are linear and ime-invarian
Copyrigh F.L. Lewi 999 All righ reerved EE 434 - Conrol Syem LECTURE REVIEW OF LAPLACE TRANSFORM LAPLACE TRANSFORM The Laplace ranform i very ueful in analyi and deign for yem ha are linear and ime-invarian
14 Autoregressive Moving Average Models
 14 Auoregressive Moving Average Models In his chaper an imporan parameric family of saionary ime series is inroduced, he family of he auoregressive moving average, or ARMA, processes. For a large class
14 Auoregressive Moving Average Models In his chaper an imporan parameric family of saionary ime series is inroduced, he family of he auoregressive moving average, or ARMA, processes. For a large class
DYNAMIC ECONOMETRIC MODELS vol NICHOLAS COPERNICUS UNIVERSITY - TORUŃ Józef Stawicki and Joanna Górka Nicholas Copernicus University
 DYNAMIC ECONOMETRIC MODELS vol.. - NICHOLAS COPERNICUS UNIVERSITY - TORUŃ 996 Józef Sawicki and Joanna Górka Nicholas Copernicus Universiy ARMA represenaion for a sum of auoregressive processes In he ime
DYNAMIC ECONOMETRIC MODELS vol.. - NICHOLAS COPERNICUS UNIVERSITY - TORUŃ 996 Józef Sawicki and Joanna Górka Nicholas Copernicus Universiy ARMA represenaion for a sum of auoregressive processes In he ime
CHAPTER. Forced Equations and Systems { } ( ) ( ) 8.1 The Laplace Transform and Its Inverse. Transforms from the Definition.
 ( ) 8.1 The Laplace Transform and Its Inverse. Transforms from the Definition.") CHAPTER 8 Forced Equaion and Syem 8 The aplace Tranform and I Invere Tranform from he Definiion 5 5 = b b {} 5 = 5e d = lim5 e = ( ) b {} = e d = lim e + e d b = (inegraion by par) = = = = b b ( ) ( )
CHAPTER 8 Forced Equaion and Syem 8 The aplace Tranform and I Invere Tranform from he Definiion 5 5 = b b {} 5 = 5e d = lim5 e = ( ) b {} = e d = lim e + e d b = (inegraion by par) = = = = b b ( ) ( )
CS4445/9544 Analysis of Algorithms II Solution for Assignment 1
 Conider he following flow nework CS444/944 Analyi of Algorihm II Soluion for Aignmen (0 mark) In he following nework a minimum cu ha capaciy 0 Eiher prove ha hi aemen i rue, or how ha i i fale Uing he
Conider he following flow nework CS444/944 Analyi of Algorihm II Soluion for Aignmen (0 mark) In he following nework a minimum cu ha capaciy 0 Eiher prove ha hi aemen i rue, or how ha i i fale Uing he
Problem Set If all directed edges in a network have distinct capacities, then there is a unique maximum flow.
 CSE 202: Deign and Analyi of Algorihm Winer 2013 Problem Se 3 Inrucor: Kamalika Chaudhuri Due on: Tue. Feb 26, 2013 Inrucion For your proof, you may ue any lower bound, algorihm or daa rucure from he ex
CSE 202: Deign and Analyi of Algorihm Winer 2013 Problem Se 3 Inrucor: Kamalika Chaudhuri Due on: Tue. Feb 26, 2013 Inrucion For your proof, you may ue any lower bound, algorihm or daa rucure from he ex
Diebold, Chapter 7. Francis X. Diebold, Elements of Forecasting, 4th Edition (Mason, Ohio: Cengage Learning, 2006). Chapter 7. Characterizing Cycles
. Chapter 7. Characterizing Cycles") Diebold, Chaper 7 Francis X. Diebold, Elemens of Forecasing, 4h Ediion (Mason, Ohio: Cengage Learning, 006). Chaper 7. Characerizing Cycles Afer compleing his reading you should be able o: Define covariance
Diebold, Chaper 7 Francis X. Diebold, Elemens of Forecasing, 4h Ediion (Mason, Ohio: Cengage Learning, 006). Chaper 7. Characerizing Cycles Afer compleing his reading you should be able o: Define covariance
Chapter 6. Laplace Transforms
 6- Chaper 6. Laplace Tranform 6.4 Shor Impule. Dirac Dela Funcion. Parial Fracion 6.5 Convoluion. Inegral Equaion 6.6 Differeniaion and Inegraion of Tranform 6.7 Syem of ODE 6.4 Shor Impule. Dirac Dela
6- Chaper 6. Laplace Tranform 6.4 Shor Impule. Dirac Dela Funcion. Parial Fracion 6.5 Convoluion. Inegral Equaion 6.6 Differeniaion and Inegraion of Tranform 6.7 Syem of ODE 6.4 Shor Impule. Dirac Dela
Quarterly ice cream sales are high each summer, and the series tends to repeat itself each year, so that the seasonal period is 4.
 Seasonal models Many business and economic ime series conain a seasonal componen ha repeas iself afer a regular period of ime. The smalles ime period for his repeiion is called he seasonal period, and
Seasonal models Many business and economic ime series conain a seasonal componen ha repeas iself afer a regular period of ime. The smalles ime period for his repeiion is called he seasonal period, and
CHAPTER 7: SECOND-ORDER CIRCUITS
 EEE5: CI RCUI T THEORY CHAPTER 7: SECOND-ORDER CIRCUITS 7. Inroducion Thi chaper conider circui wih wo orage elemen. Known a econd-order circui becaue heir repone are decribed by differenial equaion ha
EEE5: CI RCUI T THEORY CHAPTER 7: SECOND-ORDER CIRCUITS 7. Inroducion Thi chaper conider circui wih wo orage elemen. Known a econd-order circui becaue heir repone are decribed by differenial equaion ha
Mon Apr 2: Laplace transform and initial value problems like we studied in Chapter 5
 Mah 225-4 Week 2 April 2-6 coninue.-.3; alo cover par of.4-.5, EP 7.6 Mon Apr 2:.-.3 Laplace ranform and iniial value problem like we udied in Chaper 5 Announcemen: Warm-up Exercie: Recall, The Laplace
Mah 225-4 Week 2 April 2-6 coninue.-.3; alo cover par of.4-.5, EP 7.6 Mon Apr 2:.-.3 Laplace ranform and iniial value problem like we udied in Chaper 5 Announcemen: Warm-up Exercie: Recall, The Laplace
6.302 Feedback Systems Recitation : Phase-locked Loops Prof. Joel L. Dawson
 6.32 Feedback Syem Phae-locked loop are a foundaional building block for analog circui deign, paricularly for communicaion circui. They provide a good example yem for hi cla becaue hey are an excellen
6.32 Feedback Syem Phae-locked loop are a foundaional building block for analog circui deign, paricularly for communicaion circui. They provide a good example yem for hi cla becaue hey are an excellen
6.8 Laplace Transform: General Formulas
 48 HAP. 6 Laplace Tranform 6.8 Laplace Tranform: General Formula Formula Name, ommen Sec. F() l{ f ()} e f () d f () l {F()} Definiion of Tranform Invere Tranform 6. l{af () bg()} al{f ()} bl{g()} Lineariy
48 HAP. 6 Laplace Tranform 6.8 Laplace Tranform: General Formula Formula Name, ommen Sec. F() l{ f ()} e f () d f () l {F()} Definiion of Tranform Invere Tranform 6. l{af () bg()} al{f ()} bl{g()} Lineariy
- The whole joint distribution is independent of the date at which it is measured and depends only on the lag.
 Saionary Processes Sricly saionary - The whole join disribuion is indeenden of he dae a which i is measured and deends only on he lag. - E y ) is a finie consan. ( - V y ) is a finie consan. ( ( y, y s
Saionary Processes Sricly saionary - The whole join disribuion is indeenden of he dae a which i is measured and deends only on he lag. - E y ) is a finie consan. ( - V y ) is a finie consan. ( ( y, y s
Chapter 8: Response of Linear Systems to Random Inputs
 Caper 8: epone of Linear yem o anom Inpu 8- Inroucion 8- nalyi in e ime Domain 8- Mean an Variance Value of yem Oupu 8-4 uocorrelaion Funcion of yem Oupu 8-5 Crocorrelaion beeen Inpu an Oupu 8-6 ample
Caper 8: epone of Linear yem o anom Inpu 8- Inroucion 8- nalyi in e ime Domain 8- Mean an Variance Value of yem Oupu 8-4 uocorrelaion Funcion of yem Oupu 8-5 Crocorrelaion beeen Inpu an Oupu 8-6 ample
A Theoretical Model of a Voltage Controlled Oscillator
 A Theoreical Model of a Volage Conrolled Ocillaor Yenming Chen Advior: Dr. Rober Scholz Communicaion Science Iniue Univeriy of Souhern California UWB Workhop, April 11-1, 6 Inroducion Moivaion The volage
A Theoreical Model of a Volage Conrolled Ocillaor Yenming Chen Advior: Dr. Rober Scholz Communicaion Science Iniue Univeriy of Souhern California UWB Workhop, April 11-1, 6 Inroducion Moivaion The volage
Instrumentation & Process Control
 Chemical Engineering (GTE & PSU) Poal Correpondence GTE & Public Secor Inrumenaion & Proce Conrol To Buy Poal Correpondence Package call a -999657855 Poal Coure ( GTE & PSU) 5 ENGINEERS INSTITUTE OF INDI.
Chemical Engineering (GTE & PSU) Poal Correpondence GTE & Public Secor Inrumenaion & Proce Conrol To Buy Poal Correpondence Package call a -999657855 Poal Coure ( GTE & PSU) 5 ENGINEERS INSTITUTE OF INDI.
Box-Jenkins Modelling of Nigerian Stock Prices Data
 Greener Journal of Science Engineering and Technological Research ISSN: 76-7835 Vol. (), pp. 03-038, Sepember 0. Research Aricle Box-Jenkins Modelling of Nigerian Sock Prices Daa Ee Harrison Euk*, Barholomew
Greener Journal of Science Engineering and Technological Research ISSN: 76-7835 Vol. (), pp. 03-038, Sepember 0. Research Aricle Box-Jenkins Modelling of Nigerian Sock Prices Daa Ee Harrison Euk*, Barholomew
Laplace Transform. Inverse Laplace Transform. e st f(t)dt. (2)
dt. (2)") Laplace Tranform Maoud Malek The Laplace ranform i an inegral ranform named in honor of mahemaician and aronomer Pierre-Simon Laplace, who ued he ranform in hi work on probabiliy heory. I i a powerful
Laplace Tranform Maoud Malek The Laplace ranform i an inegral ranform named in honor of mahemaician and aronomer Pierre-Simon Laplace, who ued he ranform in hi work on probabiliy heory. I i a powerful
ECE Spring Prof. David R. Jackson ECE Dept. Notes 39
 ECE 6341 Spring 2016 Prof. David R. Jackon ECE Dep. Noe 39 1 Finie Source J ( y, ) For a phaed curren hee: p p j( k kyy) J y = J e + (, ) 0 The angenial elecric field ha i produced i: ( p ˆ ˆ) j( k + k
ECE 6341 Spring 2016 Prof. David R. Jackon ECE Dep. Noe 39 1 Finie Source J ( y, ) For a phaed curren hee: p p j( k kyy) J y = J e + (, ) 0 The angenial elecric field ha i produced i: ( p ˆ ˆ) j( k + k
ST4064. Time Series Analysis. Lecture notes
 ST4064 Time Series Analysis ST4064 Time Series Analysis Lecure noes ST4064 Time Series Analysis Ouline I II Inroducion o ime series analysis Saionariy and ARMA modelling. Saionariy a. Definiions b. Sric
ST4064 Time Series Analysis ST4064 Time Series Analysis Lecure noes ST4064 Time Series Analysis Ouline I II Inroducion o ime series analysis Saionariy and ARMA modelling. Saionariy a. Definiions b. Sric
Interpolation and Pulse Shaping
 EE345S Real-Time Digial Signal Proceing Lab Spring 2006 Inerpolaion and Pule Shaping Prof. Brian L. Evan Dep. of Elecrical and Compuer Engineering The Univeriy of Texa a Auin Lecure 7 Dicree-o-Coninuou
EE345S Real-Time Digial Signal Proceing Lab Spring 2006 Inerpolaion and Pule Shaping Prof. Brian L. Evan Dep. of Elecrical and Compuer Engineering The Univeriy of Texa a Auin Lecure 7 Dicree-o-Coninuou
Linear Gaussian State Space Models
 Linear Gaussian Sae Space Models Srucural Time Series Models Level and Trend Models Basic Srucural Model (BSM Dynamic Linear Models Sae Space Model Represenaion Level, Trend, and Seasonal Models Time Varying
Linear Gaussian Sae Space Models Srucural Time Series Models Level and Trend Models Basic Srucural Model (BSM Dynamic Linear Models Sae Space Model Represenaion Level, Trend, and Seasonal Models Time Varying
Network Flows: Introduction & Maximum Flow
 CSC 373 - lgorihm Deign, nalyi, and Complexiy Summer 2016 Lalla Mouaadid Nework Flow: Inroducion & Maximum Flow We now urn our aenion o anoher powerful algorihmic echnique: Local Search. In a local earch
CSC 373 - lgorihm Deign, nalyi, and Complexiy Summer 2016 Lalla Mouaadid Nework Flow: Inroducion & Maximum Flow We now urn our aenion o anoher powerful algorihmic echnique: Local Search. In a local earch
Y 0.4Y 0.45Y Y to a proper ARMA specification.
 HG Jan 04 ECON 50 Exercises II - 0 Feb 04 (wih answers Exercise. Read secion 8 in lecure noes 3 (LN3 on he common facor problem in ARMA-processes. Consider he following process Y 0.4Y 0.45Y 0.5 ( where
HG Jan 04 ECON 50 Exercises II - 0 Feb 04 (wih answers Exercise. Read secion 8 in lecure noes 3 (LN3 on he common facor problem in ARMA-processes. Consider he following process Y 0.4Y 0.45Y 0.5 ( where
Chapter 9 - The Laplace Transform
 Chaper 9 - The Laplace Tranform Selece Soluion. Skech he pole-zero plo an region of convergence (if i exi) for hee ignal. ω [] () 8 (a) x e u = 8 ROC σ ( ) 3 (b) x e co π u ω [] ( ) () (c) x e u e u ROC
Chaper 9 - The Laplace Tranform Selece Soluion. Skech he pole-zero plo an region of convergence (if i exi) for hee ignal. ω [] () 8 (a) x e u = 8 ROC σ ( ) 3 (b) x e co π u ω [] ( ) () (c) x e u e u ROC
More on ODEs by Laplace Transforms October 30, 2017
 More on OE b Laplace Tranfor Ocober, 7 More on Ordinar ifferenial Equaion wih Laplace Tranfor Larr areo Mechanical Engineering 5 Seinar in Engineering nali Ocober, 7 Ouline Review la cla efiniion of Laplace
More on OE b Laplace Tranfor Ocober, 7 More on Ordinar ifferenial Equaion wih Laplace Tranfor Larr areo Mechanical Engineering 5 Seinar in Engineering nali Ocober, 7 Ouline Review la cla efiniion of Laplace
Stability in Distribution for Backward Uncertain Differential Equation
 Sabiliy in Diribuion for Backward Uncerain Differenial Equaion Yuhong Sheng 1, Dan A. Ralecu 2 1. College of Mahemaical and Syem Science, Xinjiang Univeriy, Urumqi 8346, China heng-yh12@mail.inghua.edu.cn
Sabiliy in Diribuion for Backward Uncerain Differenial Equaion Yuhong Sheng 1, Dan A. Ralecu 2 1. College of Mahemaical and Syem Science, Xinjiang Univeriy, Urumqi 8346, China heng-yh12@mail.inghua.edu.cn
Section 4 NABE ASTEF 232
 Secion 4 NABE ASTEF 3 APPLIED ECONOMETRICS: TIME-SERIES ANALYSIS 33 Inroducion and Review The Naure of Economic Modeling Judgemen calls unavoidable Economerics an ar Componens of Applied Economerics Specificaion
Secion 4 NABE ASTEF 3 APPLIED ECONOMETRICS: TIME-SERIES ANALYSIS 33 Inroducion and Review The Naure of Economic Modeling Judgemen calls unavoidable Economerics an ar Componens of Applied Economerics Specificaion
Research Article Existence and Uniqueness of Solutions for a Class of Nonlinear Stochastic Differential Equations
 Hindawi Publihing Corporaion Abrac and Applied Analyi Volume 03, Aricle ID 56809, 7 page hp://dx.doi.org/0.55/03/56809 Reearch Aricle Exience and Uniquene of Soluion for a Cla of Nonlinear Sochaic Differenial
Hindawi Publihing Corporaion Abrac and Applied Analyi Volume 03, Aricle ID 56809, 7 page hp://dx.doi.org/0.55/03/56809 Reearch Aricle Exience and Uniquene of Soluion for a Cla of Nonlinear Sochaic Differenial
12: AUTOREGRESSIVE AND MOVING AVERAGE PROCESSES IN DISCRETE TIME. Σ j =
 1: AUTOREGRESSIVE AND MOVING AVERAGE PROCESSES IN DISCRETE TIME Moving Averages Recall ha a whie noise process is a series { } = having variance σ. The whie noise process has specral densiy f (λ) = of
1: AUTOREGRESSIVE AND MOVING AVERAGE PROCESSES IN DISCRETE TIME Moving Averages Recall ha a whie noise process is a series { } = having variance σ. The whie noise process has specral densiy f (λ) = of
Frequency Response. We now know how to analyze and design ccts via s- domain methods which yield dynamical information
 Frequency Repone We now now how o analyze and deign cc via - domain mehod which yield dynamical informaion Zero-ae repone Zero-inpu repone Naural repone Forced repone The repone are decribed by he exponenial
Frequency Repone We now now how o analyze and deign cc via - domain mehod which yield dynamical informaion Zero-ae repone Zero-inpu repone Naural repone Forced repone The repone are decribed by he exponenial
s-domain Circuit Analysis
 Domain ircui Analyi Operae direcly in he domain wih capacior, inducor and reior Key feaure lineariy i preerved c decribed by ODE and heir I Order equal number of plu number of Elemenbyelemen and ource
Domain ircui Analyi Operae direcly in he domain wih capacior, inducor and reior Key feaure lineariy i preerved c decribed by ODE and heir I Order equal number of plu number of Elemenbyelemen and ource
Lesson 2, page 1. Outline of lesson 2
 Lesson 2, page Ouline of lesson 2 Inroduce he Auocorrelaion Coefficien Undersand and define saionariy Discuss ransformaion Discuss rend and rend removal C:\Kyrre\sudier\drgrad\Kurs\series\lecure 02 03022.doc,
Lesson 2, page Ouline of lesson 2 Inroduce he Auocorrelaion Coefficien Undersand and define saionariy Discuss ransformaion Discuss rend and rend removal C:\Kyrre\sudier\drgrad\Kurs\series\lecure 02 03022.doc,
EE202 Circuit Theory II
 EE202 Circui Theory II 2017-2018, Spring Dr. Yılmaz KALKAN I. Inroducion & eview of Fir Order Circui (Chaper 7 of Nilon - 3 Hr. Inroducion, C and L Circui, Naural and Sep epone of Serie and Parallel L/C
EE202 Circui Theory II 2017-2018, Spring Dr. Yılmaz KALKAN I. Inroducion & eview of Fir Order Circui (Chaper 7 of Nilon - 3 Hr. Inroducion, C and L Circui, Naural and Sep epone of Serie and Parallel L/C
Chapter 8 Objectives
 haper 8 Engr8 ircui Analyi Dr uri Nelon haper 8 Objecive Be able o eermine he naural an he ep repone of parallel circui; Be able o eermine he naural an he ep repone of erie circui. Engr8 haper 8, Nilon
haper 8 Engr8 ircui Analyi Dr uri Nelon haper 8 Objecive Be able o eermine he naural an he ep repone of parallel circui; Be able o eermine he naural an he ep repone of erie circui. Engr8 haper 8, Nilon
Financial Econometrics Jeffrey R. Russell Midterm Winter 2009 SOLUTIONS
 Name SOLUTIONS Financial Economerics Jeffrey R. Russell Miderm Winer 009 SOLUTIONS You have 80 minues o complee he exam. Use can use a calculaor and noes. Try o fi all your work in he space provided. If
Name SOLUTIONS Financial Economerics Jeffrey R. Russell Miderm Winer 009 SOLUTIONS You have 80 minues o complee he exam. Use can use a calculaor and noes. Try o fi all your work in he space provided. If
Time series Decomposition method
 Time series Decomposiion mehod A ime series is described using a mulifacor model such as = f (rend, cyclical, seasonal, error) = f (T, C, S, e) Long- Iner-mediaed Seasonal Irregular erm erm effec, effec,
Time series Decomposiion mehod A ime series is described using a mulifacor model such as = f (rend, cyclical, seasonal, error) = f (T, C, S, e) Long- Iner-mediaed Seasonal Irregular erm erm effec, effec,
8.1. a) For step response, M input is u ( t) Taking inverse Laplace transform. as α 0. Ideal response, K c. = Kc Mτ D + For ramp response, 8-1
 For step response, M input is u ( t) Taking inverse Laplace transform. as α 0. Ideal response, K c. = Kc Mτ D + For ramp response, 8-1") 8. a For ep repone, inpu i u, U Y a U α α Y a α α Taking invere Laplae ranform a α e e / α / α A α 0 a δ 0 e / α a δ deal repone, α d Y i Gi U i δ Hene a α 0 a i For ramp repone, inpu i u, U Soluion anual
8. a For ep repone, inpu i u, U Y a U α α Y a α α Taking invere Laplae ranform a α e e / α / α A α 0 a δ 0 e / α a δ deal repone, α d Y i Gi U i δ Hene a α 0 a i For ramp repone, inpu i u, U Soluion anual
Applied Time Series Notes White noise: e t mean 0, variance 5 2 uncorrelated Moving Average
 Applied Time Series Noes Whie noise: e mean 0, variance 5 uncorrelaed Moving Average Order 1: (Y. ) œ e ) 1e -1 all Order q: (Y. ) œ e ) e â ) e all 1-1 q -q ( 14 ) Infinie order: (Y. ) œ e ) 1e -1 ) e
Applied Time Series Noes Whie noise: e mean 0, variance 5 uncorrelaed Moving Average Order 1: (Y. ) œ e ) 1e -1 all Order q: (Y. ) œ e ) e â ) e all 1-1 q -q ( 14 ) Infinie order: (Y. ) œ e ) 1e -1 ) e
Lecture 12. Aperture and Noise. Jaeha Kim Mixed-Signal IC and System Group (MICS) Seoul National University
 Seoul National University") Lecure. Aperure and Noie Analyi of locked omparaor Jaeha Kim Mixed-Signal I and Syem Group MIS Seoul Naional Univeriy jaeha@ieee.org locked omparaor a.k.a. regeneraive amplifier, ene-amplifier, flip-flop,
Lecure. Aperure and Noie Analyi of locked omparaor Jaeha Kim Mixed-Signal I and Syem Group MIS Seoul Naional Univeriy jaeha@ieee.org locked omparaor a.k.a. regeneraive amplifier, ene-amplifier, flip-flop,
CHAPTER 3 SIGNALS & SYSTEMS. z -transform in the z -plane will be (A) 1 (B) 1 (D) (C) . The unilateral Laplace transform of tf() (A) s (B) + + (D) (C)
 1 (B) 1 (D) (C) . The unilateral Laplace transform of tf() (A) s (B) + + (D) (C)") CHAPER SIGNALS & SYSEMS YEAR ONE MARK n n MCQ. If xn [ ] (/) (/) un [ ], hen he region of convergence (ROC) of i z ranform in he z plane will be (A) < z < (B) < z < (C) < z < (D) < z MCQ. he unilaeral
CHAPER SIGNALS & SYSEMS YEAR ONE MARK n n MCQ. If xn [ ] (/) (/) un [ ], hen he region of convergence (ROC) of i z ranform in he z plane will be (A) < z < (B) < z < (C) < z < (D) < z MCQ. he unilaeral
STAD57 Time Series Analysis. Lecture 5
 STAD57 Time Series Analysis Lecure 5 1 Exploraory Daa Analysis Check if given TS is saionary: µ is consan σ 2 is consan γ(s,) is funcion of h= s If no, ry o make i saionary using some of he mehods below:
STAD57 Time Series Analysis Lecure 5 1 Exploraory Daa Analysis Check if given TS is saionary: µ is consan σ 2 is consan γ(s,) is funcion of h= s If no, ry o make i saionary using some of he mehods below:
Flow networks. Flow Networks. A flow on a network. Flow networks. The maximum-flow problem. Introduction to Algorithms, Lecture 22 December 5, 2001
 CS 545 Flow Nework lon Efra Slide courey of Charle Leieron wih mall change by Carola Wenk Flow nework Definiion. flow nework i a direced graph G = (V, E) wih wo diinguihed verice: a ource and a ink. Each
CS 545 Flow Nework lon Efra Slide courey of Charle Leieron wih mall change by Carola Wenk Flow nework Definiion. flow nework i a direced graph G = (V, E) wih wo diinguihed verice: a ource and a ink. Each
UT Austin, ECE Department VLSI Design 5. CMOS Gate Characteristics
 La moule: CMOS Tranior heory Thi moule: DC epone Logic Level an Noie Margin Tranien epone Delay Eimaion Tranior ehavior 1) If he wih of a ranior increae, he curren will ) If he lengh of a ranior increae,
La moule: CMOS Tranior heory Thi moule: DC epone Logic Level an Noie Margin Tranien epone Delay Eimaion Tranior ehavior 1) If he wih of a ranior increae, he curren will ) If he lengh of a ranior increae,
NECESSARY AND SUFFICIENT CONDITIONS FOR LATENT SEPARABILITY
 NECESSARY AND SUFFICIENT CONDITIONS FOR LATENT SEPARABILITY Ian Crawford THE INSTITUTE FOR FISCAL STUDIES DEPARTMENT OF ECONOMICS, UCL cemmap working paper CWP02/04 Neceary and Sufficien Condiion for Laen
NECESSARY AND SUFFICIENT CONDITIONS FOR LATENT SEPARABILITY Ian Crawford THE INSTITUTE FOR FISCAL STUDIES DEPARTMENT OF ECONOMICS, UCL cemmap working paper CWP02/04 Neceary and Sufficien Condiion for Laen
Licenciatura de ADE y Licenciatura conjunta Derecho y ADE. Hoja de ejercicios 2 PARTE A
 Licenciaura de ADE y Licenciaura conjuna Derecho y ADE Hoja de ejercicios PARTE A 1. Consider he following models Δy = 0.8 + ε (1 + 0.8L) Δ 1 y = ε where ε and ε are independen whie noise processes. In
Licenciaura de ADE y Licenciaura conjuna Derecho y ADE Hoja de ejercicios PARTE A 1. Consider he following models Δy = 0.8 + ε (1 + 0.8L) Δ 1 y = ε where ε and ε are independen whie noise processes. In
04. Kinetics of a second order reaction
 4. Kineics of a second order reacion Imporan conceps Reacion rae, reacion exen, reacion rae equaion, order of a reacion, firs-order reacions, second-order reacions, differenial and inegraed rae laws, Arrhenius
4. Kineics of a second order reacion Imporan conceps Reacion rae, reacion exen, reacion rae equaion, order of a reacion, firs-order reacions, second-order reacions, differenial and inegraed rae laws, Arrhenius
Chapter 5. Heterocedastic Models. Introduction to time series (2008) 1
 1") Chaper 5 Heerocedasic Models Inroducion o ime series (2008) 1 Chaper 5. Conens. 5.1. The ARCH model. 5.2. The GARCH model. 5.3. The exponenial GARCH model. 5.4. The CHARMA model. 5.5. Random coefficien
Chaper 5 Heerocedasic Models Inroducion o ime series (2008) 1 Chaper 5. Conens. 5.1. The ARCH model. 5.2. The GARCH model. 5.3. The exponenial GARCH model. 5.4. The CHARMA model. 5.5. Random coefficien
Signals and Systems Linear Time-Invariant (LTI) Systems
 Systems") Signals and Sysems Linear Time-Invarian (LTI) Sysems Chang-Su Kim Discree-Time LTI Sysems Represening Signals in Terms of Impulses Sifing propery 0 x[ n] x[ k] [ n k] k x[ 2] [ n 2] x[ 1] [ n1] x[0] [
Signals and Sysems Linear Time-Invarian (LTI) Sysems Chang-Su Kim Discree-Time LTI Sysems Represening Signals in Terms of Impulses Sifing propery 0 x[ n] x[ k] [ n k] k x[ 2] [ n 2] x[ 1] [ n1] x[0] [
t is a basis for the solution space to this system, then the matrix having these solutions as columns, t x 1 t, x 2 t,... x n t x 2 t...
 Mah 228- Fri Mar 24 5.6 Marix exponenials and linear sysems: The analogy beween firs order sysems of linear differenial equaions (Chaper 5) and scalar linear differenial equaions (Chaper ) is much sronger
Mah 228- Fri Mar 24 5.6 Marix exponenials and linear sysems: The analogy beween firs order sysems of linear differenial equaions (Chaper 5) and scalar linear differenial equaions (Chaper ) is much sronger
Buckling of a structure means failure due to excessive displacements (loss of structural stiffness), and/or
, and/or") Buckling Buckling of a rucure mean failure due o exceive diplacemen (lo of rucural iffne), and/or lo of abiliy of an equilibrium configuraion of he rucure The rule of humb i ha buckling i conidered a mode
Buckling Buckling of a rucure mean failure due o exceive diplacemen (lo of rucural iffne), and/or lo of abiliy of an equilibrium configuraion of he rucure The rule of humb i ha buckling i conidered a mode
OBJECTIVES OF TIME SERIES ANALYSIS
 OBJECTIVES OF TIME SERIES ANALYSIS Undersanding he dynamic or imedependen srucure of he observaions of a single series (univariae analysis) Forecasing of fuure observaions Asceraining he leading, lagging
OBJECTIVES OF TIME SERIES ANALYSIS Undersanding he dynamic or imedependen srucure of he observaions of a single series (univariae analysis) Forecasing of fuure observaions Asceraining he leading, lagging
EECS 2602 Winter Laboratory 3 Fourier series, Fourier transform and Bode Plots in MATLAB
 EECS 6 Winer 7 Laboraory 3 Fourier series, Fourier ransform and Bode Plos in MATLAB Inroducion: The objecives of his lab are o use MATLAB:. To plo periodic signals wih Fourier series represenaion. To obain
EECS 6 Winer 7 Laboraory 3 Fourier series, Fourier ransform and Bode Plos in MATLAB Inroducion: The objecives of his lab are o use MATLAB:. To plo periodic signals wih Fourier series represenaion. To obain
Control Systems. Lecture 9 Frequency Response. Frequency Response
 Conrol Syem Lecure 9 Frequency eone Frequency eone We now know how o analyze and deign yem via -domain mehod which yield dynamical informaion The reone are decribed by he exonenial mode The mode are deermined
Conrol Syem Lecure 9 Frequency eone Frequency eone We now know how o analyze and deign yem via -domain mehod which yield dynamical informaion The reone are decribed by he exonenial mode The mode are deermined
Section 3.5 Nonhomogeneous Equations; Method of Undetermined Coefficients
 Secion 3.5 Nonhomogeneous Equaions; Mehod of Undeermined Coefficiens Key Terms/Ideas: Linear Differenial operaor Nonlinear operaor Second order homogeneous DE Second order nonhomogeneous DE Soluion o homogeneous
Secion 3.5 Nonhomogeneous Equaions; Mehod of Undeermined Coefficiens Key Terms/Ideas: Linear Differenial operaor Nonlinear operaor Second order homogeneous DE Second order nonhomogeneous DE Soluion o homogeneous
AN ANALYTICAL METHOD OF SOLUTION FOR SYSTEMS OF BOOLEAN EQUATIONS
 CHAPTER 5 AN ANALYTICAL METHOD OF SOLUTION FOR SYSTEMS OF BOOLEAN EQUATIONS 51 APPLICATIONS OF DE MORGAN S LAWS A we have een in Secion 44 of Chaer 4, any Boolean Equaion of ye (1), (2) or (3) could be
CHAPTER 5 AN ANALYTICAL METHOD OF SOLUTION FOR SYSTEMS OF BOOLEAN EQUATIONS 51 APPLICATIONS OF DE MORGAN S LAWS A we have een in Secion 44 of Chaer 4, any Boolean Equaion of ye (1), (2) or (3) could be
1 Motivation and Basic Definitions
 CSCE : Deign and Analyi of Algorihm Noe on Max Flow Fall 20 (Baed on he preenaion in Chaper 26 of Inroducion o Algorihm, 3rd Ed. by Cormen, Leieron, Rive and Sein.) Moivaion and Baic Definiion Conider
CSCE : Deign and Analyi of Algorihm Noe on Max Flow Fall 20 (Baed on he preenaion in Chaper 26 of Inroducion o Algorihm, 3rd Ed. by Cormen, Leieron, Rive and Sein.) Moivaion and Baic Definiion Conider
FIXED POINTS AND STABILITY IN NEUTRAL DIFFERENTIAL EQUATIONS WITH VARIABLE DELAYS
 PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 136, Number 3, March 28, Page 99 918 S 2-9939(7)989-2 Aricle elecronically publihed on November 3, 27 FIXED POINTS AND STABILITY IN NEUTRAL DIFFERENTIAL
PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 136, Number 3, March 28, Page 99 918 S 2-9939(7)989-2 Aricle elecronically publihed on November 3, 27 FIXED POINTS AND STABILITY IN NEUTRAL DIFFERENTIAL
CHAPTER HIGHER-ORDER SYSTEMS: SECOND-ORDER AND TRANSPORTATION LAG. 7.1 SECOND-ORDER SYSTEM Transfer Function
 CHAPTER 7 HIGHER-ORDER SYSTEMS: SECOND-ORDER AND TRANSPORTATION LAG 7. SECOND-ORDER SYSTEM Tranfer Funcion Thi ecion inroduce a baic yem called a econd-order yem or a quadraic lag. Second-order yem are
CHAPTER 7 HIGHER-ORDER SYSTEMS: SECOND-ORDER AND TRANSPORTATION LAG 7. SECOND-ORDER SYSTEM Tranfer Funcion Thi ecion inroduce a baic yem called a econd-order yem or a quadraic lag. Second-order yem are
Network Flows UPCOPENCOURSEWARE number 34414
 Nework Flow UPCOPENCOURSEWARE number Topic : F.-Javier Heredia Thi work i licened under he Creaive Common Aribuion- NonCommercial-NoDeriv. Unpored Licene. To view a copy of hi licene, vii hp://creaivecommon.org/licene/by-nc-nd/./
Nework Flow UPCOPENCOURSEWARE number Topic : F.-Javier Heredia Thi work i licened under he Creaive Common Aribuion- NonCommercial-NoDeriv. Unpored Licene. To view a copy of hi licene, vii hp://creaivecommon.org/licene/by-nc-nd/./
EE 315 Notes. Gürdal Arslan CLASS 1. (Sections ) What is a signal?
 What is a signal?") EE 35 Noes Gürdal Arslan CLASS (Secions.-.2) Wha is a signal? In his class, a signal is some funcion of ime and i represens how some physical quaniy changes over some window of ime. Examples: velociy of
EE 35 Noes Gürdal Arslan CLASS (Secions.-.2) Wha is a signal? In his class, a signal is some funcion of ime and i represens how some physical quaniy changes over some window of ime. Examples: velociy of
For example, the comb filter generated from. ( ) has a transfer function. e ) has L notches at ω = (2k+1)π/L and L peaks at ω = 2π k/l,
 has a transfer function. e ) has L notches at ω = (2k+1)π/L and L peaks at ω = 2π k/l,") Comb Filers The simple filers discussed so far are characeried eiher by a single passband and/or a single sopband There are applicaions where filers wih muliple passbands and sopbands are required The
Comb Filers The simple filers discussed so far are characeried eiher by a single passband and/or a single sopband There are applicaions where filers wih muliple passbands and sopbands are required The
5. Response of Linear Time-Invariant Systems to Random Inputs
 Sysem: 5. Response of inear ime-invarian Sysems o Random Inpus 5.. Discree-ime linear ime-invarian (IV) sysems 5... Discree-ime IV sysem IV sysem xn ( ) yn ( ) [ xn ( )] Inpu Signal Sysem S Oupu Signal
Sysem: 5. Response of inear ime-invarian Sysems o Random Inpus 5.. Discree-ime linear ime-invarian (IV) sysems 5... Discree-ime IV sysem IV sysem xn ( ) yn ( ) [ xn ( )] Inpu Signal Sysem S Oupu Signal
The Residual Graph. 12 Augmenting Path Algorithms. Augmenting Path Algorithm. Augmenting Path Algorithm
 Augmening Pah Algorihm Greedy-algorihm: ar wih f (e) = everywhere find an - pah wih f (e) < c(e) on every edge augmen flow along he pah repea a long a poible The Reidual Graph From he graph G = (V, E,
Augmening Pah Algorihm Greedy-algorihm: ar wih f (e) = everywhere find an - pah wih f (e) < c(e) on every edge augmen flow along he pah repea a long a poible The Reidual Graph From he graph G = (V, E,
A Risk-Averse Insider and Asset Pricing in Continuous Time
 Managemen Science and Financial Engineering Vol 9, No, May 3, pp-6 ISSN 87-43 EISSN 87-36 hp://dxdoiorg/7737/msfe39 3 KORMS A Rik-Avere Inider and Ae Pricing in oninuou Time Byung Hwa Lim Graduae School
Managemen Science and Financial Engineering Vol 9, No, May 3, pp-6 ISSN 87-43 EISSN 87-36 hp://dxdoiorg/7737/msfe39 3 KORMS A Rik-Avere Inider and Ae Pricing in oninuou Time Byung Hwa Lim Graduae School
Additional Methods for Solving DSGE Models
 Addiional Mehod for Solving DSGE Model Karel Meren, Cornell Univeriy Reference King, R. G., Ploer, C. I. & Rebelo, S. T. (1988), Producion, growh and buine cycle: I. he baic neoclaical model, Journal of
Addiional Mehod for Solving DSGE Model Karel Meren, Cornell Univeriy Reference King, R. G., Ploer, C. I. & Rebelo, S. T. (1988), Producion, growh and buine cycle: I. he baic neoclaical model, Journal of
NODIA AND COMPANY. GATE SOLVED PAPER Electrical Engineering SIGNALS & SYSTEMS. Copyright By NODIA & COMPANY
 No par of hi publicaion may be reproduced or diribued in any form or any mean, elecronic, mechanical, phoocopying, or oherie ihou he prior permiion of he auhor. GAE SOLVED PAPER Elecrical Engineering SIGNALS
No par of hi publicaion may be reproduced or diribued in any form or any mean, elecronic, mechanical, phoocopying, or oherie ihou he prior permiion of he auhor. GAE SOLVED PAPER Elecrical Engineering SIGNALS
1 Adjusted Parameters
 1 Adjued Parameer Here, we li he exac calculaion we made o arrive a our adjued parameer Thee adjumen are made for each ieraion of he Gibb ampler, for each chain of he MCMC The regional memberhip of each
1 Adjued Parameer Here, we li he exac calculaion we made o arrive a our adjued parameer Thee adjumen are made for each ieraion of he Gibb ampler, for each chain of he MCMC The regional memberhip of each
5.2 GRAPHICAL VELOCITY ANALYSIS Polygon Method
 ME 352 GRHICL VELCITY NLYSIS 52 GRHICL VELCITY NLYSIS olygon Mehod Velociy analyi form he hear of kinemaic and dynamic of mechanical yem Velociy analyi i uually performed following a poiion analyi; ie,
ME 352 GRHICL VELCITY NLYSIS 52 GRHICL VELCITY NLYSIS olygon Mehod Velociy analyi form he hear of kinemaic and dynamic of mechanical yem Velociy analyi i uually performed following a poiion analyi; ie,
The Residual Graph. 11 Augmenting Path Algorithms. Augmenting Path Algorithm. Augmenting Path Algorithm
 Augmening Pah Algorihm Greedy-algorihm: ar wih f (e) = everywhere find an - pah wih f (e) < c(e) on every edge augmen flow along he pah repea a long a poible The Reidual Graph From he graph G = (V, E,
Augmening Pah Algorihm Greedy-algorihm: ar wih f (e) = everywhere find an - pah wih f (e) < c(e) on every edge augmen flow along he pah repea a long a poible The Reidual Graph From he graph G = (V, E,
Some Basic Information about M-S-D Systems
 Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Fractional Ornstein-Uhlenbeck Bridge
 WDS'1 Proceeding of Conribued Paper, Par I, 21 26, 21. ISBN 978-8-7378-139-2 MATFYZPRESS Fracional Ornein-Uhlenbeck Bridge J. Janák Charle Univeriy, Faculy of Mahemaic and Phyic, Prague, Czech Republic.
WDS'1 Proceeding of Conribued Paper, Par I, 21 26, 21. ISBN 978-8-7378-139-2 MATFYZPRESS Fracional Ornein-Uhlenbeck Bridge J. Janák Charle Univeriy, Faculy of Mahemaic and Phyic, Prague, Czech Republic.
10. State Space Methods
 . Sae Space Mehods. Inroducion Sae space modelling was briefly inroduced in chaper. Here more coverage is provided of sae space mehods before some of heir uses in conrol sysem design are covered in he
. Sae Space Mehods. Inroducion Sae space modelling was briefly inroduced in chaper. Here more coverage is provided of sae space mehods before some of heir uses in conrol sysem design are covered in he
Rough Paths and its Applications in Machine Learning
 Pah ignaure Machine learning applicaion Rough Pah and i Applicaion in Machine Learning July 20, 2017 Rough Pah and i Applicaion in Machine Learning Pah ignaure Machine learning applicaion Hiory and moivaion
Pah ignaure Machine learning applicaion Rough Pah and i Applicaion in Machine Learning July 20, 2017 Rough Pah and i Applicaion in Machine Learning Pah ignaure Machine learning applicaion Hiory and moivaion
1 Differential Equation Investigations using Customizable
 Differenial Equaion Invesigaions using Cusomizable Mahles Rober Decker The Universiy of Harford Absrac. The auhor has developed some plaform independen, freely available, ineracive programs (mahles) for
Differenial Equaion Invesigaions using Cusomizable Mahles Rober Decker The Universiy of Harford Absrac. The auhor has developed some plaform independen, freely available, ineracive programs (mahles) for
Vectorautoregressive Model and Cointegration Analysis. Time Series Analysis Dr. Sevtap Kestel 1
 Vecorauoregressive Model and Coinegraion Analysis Par V Time Series Analysis Dr. Sevap Kesel 1 Vecorauoregression Vecor auoregression (VAR) is an economeric model used o capure he evoluion and he inerdependencies
Vecorauoregressive Model and Coinegraion Analysis Par V Time Series Analysis Dr. Sevap Kesel 1 Vecorauoregression Vecor auoregression (VAR) is an economeric model used o capure he evoluion and he inerdependencies
A generalization of the Burg s algorithm to periodically correlated time series
 A generalizaion of he Burg s algorihm o periodically correlaed ime series Georgi N. Boshnakov Insiue of Mahemaics, Bulgarian Academy of Sciences ABSTRACT In his paper periodically correlaed processes are
A generalizaion of he Burg s algorihm o periodically correlaed ime series Georgi N. Boshnakov Insiue of Mahemaics, Bulgarian Academy of Sciences ABSTRACT In his paper periodically correlaed processes are
d 1 = c 1 b 2 - b 1 c 2 d 2 = c 1 b 3 - b 1 c 3
 and d = c b - b c c d = c b - b c c This process is coninued unil he nh row has been compleed. The complee array of coefficiens is riangular. Noe ha in developing he array an enire row may be divided or
and d = c b - b c c d = c b - b c c This process is coninued unil he nh row has been compleed. The complee array of coefficiens is riangular. Noe ha in developing he array an enire row may be divided or
FLAT CYCLOTOMIC POLYNOMIALS OF ORDER FOUR AND HIGHER
 #A30 INTEGERS 10 (010), 357-363 FLAT CYCLOTOMIC POLYNOMIALS OF ORDER FOUR AND HIGHER Nahan Kaplan Deparmen of Mahemaic, Harvard Univeriy, Cambridge, MA nkaplan@mah.harvard.edu Received: 7/15/09, Revied:
#A30 INTEGERS 10 (010), 357-363 FLAT CYCLOTOMIC POLYNOMIALS OF ORDER FOUR AND HIGHER Nahan Kaplan Deparmen of Mahemaic, Harvard Univeriy, Cambridge, MA nkaplan@mah.harvard.edu Received: 7/15/09, Revied:
Discussion Session 2 Constant Acceleration/Relative Motion Week 03
 PHYS 100 Dicuion Seion Conan Acceleraion/Relaive Moion Week 03 The Plan Today you will work wih your group explore he idea of reference frame (i.e. relaive moion) and moion wih conan acceleraion. You ll
PHYS 100 Dicuion Seion Conan Acceleraion/Relaive Moion Week 03 The Plan Today you will work wih your group explore he idea of reference frame (i.e. relaive moion) and moion wih conan acceleraion. You ll
THE UNIVERSITY OF TEXAS AT AUSTIN McCombs School of Business
 THE UNIVERITY OF TEXA AT AUTIN McCombs chool of Business TA 7.5 Tom hively CLAICAL EAONAL DECOMPOITION - MULTIPLICATIVE MODEL Examples of easonaliy 8000 Quarerly sales for Wal-Mar for quarers a l e s 6000
THE UNIVERITY OF TEXA AT AUTIN McCombs chool of Business TA 7.5 Tom hively CLAICAL EAONAL DECOMPOITION - MULTIPLICATIVE MODEL Examples of easonaliy 8000 Quarerly sales for Wal-Mar for quarers a l e s 6000
Methodology. -ratios are biased and that the appropriate critical values have to be increased by an amount. that depends on the sample size.
 Mehodology. Uni Roo Tess A ime series is inegraed when i has a mean revering propery and a finie variance. I is only emporarily ou of equilibrium and is called saionary in I(0). However a ime series ha
Mehodology. Uni Roo Tess A ime series is inegraed when i has a mean revering propery and a finie variance. I is only emporarily ou of equilibrium and is called saionary in I(0). However a ime series ha