Fractals and Linear Algebra. MAA Indiana Spring Meeting 2004
|
|
|
- Norma Jefferson
- 6 years ago
- Views:
Transcription
1 Fractals and Linear Algebra MAA Indiana Spring Meeting 2004



2 Creation of a Fractal
3 Fractal
4 Fractal An object composed of smaller copies of itself
5 Fractal An object composed of smaller copies of itself Iterated Function System
6 Fractal An object composed of smaller copies of itself Iterated Function System A process of repeatedly replacing shapes with other shapes
7 First Transformations T1 T 1 T2 T 2 T3 T 3
8
9 Describe (in words) the action performed by T1, T2, and T3
10 Describe (in words) the action performed by T1, T2, and T3 Draw images of the following
11 Describe (in words) the action performed by T1, T2, and T3 Draw images of the following T 3 T 1 I 2 T 2 T ( 1 I 2 ) T 1 T ( 2 I 2 ) T 2 T ( 3 I 2 ) ( ) ( ) = T 3 T ( 1 I 2 ) T 1 T 3 T ( 2 I 2 ) T 3 T 3 T ( 3 I 2 )
12 Result
13 Result
14 Resulting Fractal
15 Resulting Fractal
16 Resulting Fractal
17 Resulting Fractal
18 Trickier Transformations
19 Trickier Transformations T3 T 3 T1 T 1 T 2 T2
20 T3 Compositions T 3 T1 T 1 T 2 T2
21 T3 Compositions T 3 T1 T 1 T 2 T2 T 1 T ( 1 I 2 ) P P
22 T3 Compositions T 3 T1 T 1 T 2 T2 T 1 T ( 1 I 2 ) P P T 2 T ( 2 I 2 ) P
23 Draw images of the following ( ) ( ) T 3 T 1 I 2 T 3 T 2 I 2 T 2 T ( 1 I 2 )
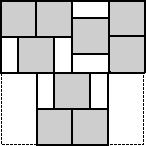
24 Draw images of the following ( ) ( ) T 3 T 1 I 2 T 3 T 2 I 2 T 2 T ( 1 I 2 ) If this is the first iteration of three transformations T 3 draw next two iterations of the complete set of transformations indicating the orientation of the squares T 1 T 2
25 Resulting Fractal
26 Resulting Fractal T 3 T 1 T 2
27 Resulting Fractal T 3 T 1 T 2


28 Resulting Fractal T 3 T 1 T 2
29 Resulting Fractal
30 Resulting Fractal T 3 T 1 T 2
31 Resulting Fractal T 3 T 1 T 2

32 Resulting Fractal T 3 T 1 T 2
33 Working Backwards
34 Working Backwards
35 Working Backwards
36 ?? Working Backwards

37 Consider the transformations shown to the right T1 T2 The figure below is the third iterate Identify T2 T1 T2 T2 T2 T2
38 Sierpinski(ish) Fractals Each of the following fractals was created using three transformations. Sketch the orientation of the P s
39
40
41
42
43
44
45
46 Formulas What are the formulas for these three transformations? What are the formulas for these three transformations? T 3 T 1 T 2
47 Formulas
48 Formulas T ( x, y) = ( ax + by + e, cx + dy + e)
49 Formulas T ( x, y) = ( ax + by + e, cx + dy + e) T x y a b = c d x y + e f
50 Matrix Transformations
51 Matrix Transformations A transformation is a rule for mapping one space to another space.
52 Matrix Transformations A transformation is a rule for mapping one space to another space. T:R 2 R 2 T ( x ) = A x T x y = a b c d x y
53 What is the image of the unit square under the following matrix transformations?
54 What is the image of the unit square under the following matrix transformations? T x y = x y
55 What is the image of the unit square under the following matrix transformations? y T x y = x y ( 0, 0.5 ) ( 0.25, 0)
56 y ( 0, 0.5 ) ( 0.25, 0) What is the image of the unit square under the following matrix transformations? T x y = x y T x y = x y
57 What is the image of the unit square under the following matrix transformations? y T x y = x y ( 0, 0.5 ) ( 0.25, 0) y T x y = x y (0, 1) (0, 1) x
58 y ( 0, 0.5 ) ( 0.25, 0) What is the image of the unit square under the following matrix transformations? T x y = x y T x y = x y T x y = x y y x (0, 1) (0, 1)
59 What is the image of the unit square under the following matrix transformations? y T x y = x y ( 0, 0.5 ) ( 0.25, 0) y T x y = x y (0, 1) (0, 1) x T x y = x y (0, 1) y (1, 0) x
60 What are the matrices that transform the unit square into the following figures? y y y (0, 1) (0, 1) (1, 0) x (1, 0) x (0, 1) x Reflection across the x axis (0, 1) y Reflection across the y axis Reflection across the line y=-x ( 1, 0) (0, k) (1, 0) x Contraction in y
61
62 y y (0, 1) (1, 0) x (1, 0) x Reflection across the x axis (0, 1)
63 y y (0, 1) (1, 0) x (1, 0) x Reflection across the x axis (0, 1)
64 y y (0, 1) (1, 0) x (1, 0) x Reflection across the x axis (0, 1) y y (0, 1) (0, 1) (1, 0) Reflection across the y axis x (0, 1) x
65 y y (0, 1) (1, 0) x (1, 0) x Reflection across the x axis (0, 1) y y (0, 1) (1, 0) x (0, 1) (0, 1) x Reflection across the y axis
66
67 y y (0, 1) (0, k) (1, 0) x (1, 0) x Contraction in y
68 (0, 1) y (1, 0) x (0, k) y (1, 0) x k Contraction in y
69 (0, 1) y (1, 0) x (0, k) y (1, 0) x k Contraction in y (0, 1) y ( 1, 0) (1, 0) x Reflection across the line y=-x
70 (0, 1) y (1, 0) x (0, k) y (1, 0) x k Contraction in y y (0, 1) (1, 0) x ( 1, 0) Reflection across the line y=-x
71 A matrix transforms the unit square into a parallelogram whose sides are determined by the column vectors. The matrix a c b d transforms the unit square into the parallelogram with vertices (0,0) (a,c) (b,d) (a+b,c+d) (0 0) ( b, d ) ( a, c) ( a+b, c+d )
72 Composition
73 Composition Draw the result of the transformation that
74 Composition Draw the result of the transformation that Reflects the unit square through the line x=y and then
75 Composition Draw the result of the transformation that Reflects the unit square through the line x=y and then Reflects the result across the x axis
76 Composition Draw the result of the transformation that Reflects the unit square through the line x=y and then Reflects the result across the x axis
77 Composition Draw the result of the transformation that Reflects the unit square through the line x=y and then Reflects the result across the x axis (0, 1) y (1, 0) x
78 Composition Draw the result of the transformation that Reflects the unit square through the line x=y and then Reflects the result across the x axis (0, 1) y (1, 0) x
79 Composition Draw the result of the transformation that Reflects the unit square through the line x=y and then Reflects the result across the x axis y y (0, 1) (0, 1) (1, 0) x (1, 0) x
80 Composition Draw the result of the transformation that Reflects the unit square through the line x=y and then Reflects the result across the x axis y y (0, 1) (0, 1) (1, 0) x (1, 0) x
81 Composition Draw the result of the transformation that Reflects the unit square through the line x=y and then Reflects the result across the x axis y y y (0, 1) (0, 1) (1, 0) x (1, 0) x (1, 0) x (0, 1)
82 Composition Draw the result of the transformation that Reflects the unit square through the line x=y and then Reflects the result across the x axis y y y (0, 1) (0, 1) (1, 0) x (1, 0) x (1, 0) x (0, 1) What is the matrix that performs this transformation?
83 Composition
84 Composition reflection in line y=x reflection across x axis composition
85 Composition y y reflection in line y=x (0, 1) (1, 0) x (0, 1) (1, 0) x reflection across x axis composition
86 Composition y y reflection in line y=x reflection across x axis composition (0, 1) (0, 1) y (1, 0) (1, 0) x x (0, 1) y (1, 0) (1, 0) x x (0, 1)
87 Composition y y reflection in line y=x reflection across x axis composition (0, 1) (0, 1) y (1, 0) (1, 0) x x (0, 1) y (1, 0) (1, 0) x x (0, 1)
88 Composition y y reflection in line y=x reflection across x axis composition (0, 1) (0, 1) y (1, 0) (1, 0) x x (0, 1) y (1, 0) (1, 0) x x (0, 1)
89 Composition
90 Composition Draw the result of the transformation that
91 Composition Draw the result of the transformation that Reflects the unit square across the x axis and then
92 Composition Draw the result of the transformation that Reflects the unit square across the x axis and then Reflects the result through the line x=y
93 Composition Draw the result of the transformation that Reflects the unit square across the x axis and then Reflects the result through the line x=y
94 Composition Draw the result of the transformation that Reflects the unit square across the x axis and then Reflects the result through the line x=y (0, 1) y (1, 0) x
95 Composition Draw the result of the transformation that Reflects the unit square across the x axis and then Reflects the result through the line x=y (0, 1) y (1, 0) x
96 Composition Draw the result of the transformation that Reflects the unit square across the x axis and then Reflects the result through the line x=y (0, 1) y y (1, 0) x (1, 0) x (0, 1)
97 Composition Draw the result of the transformation that Reflects the unit square across the x axis and then Reflects the result through the line x=y (0, 1) y y (1, 0) x (1, 0) x (0, 1)
98 Composition Draw the result of the transformation that Reflects the unit square across the x axis and then Reflects the result through the line x=y (0, 1) y y (1, 0) x (1, 0) x (-1,0) (0, 1)
99 Composition Draw the result of the transformation that Reflects the unit square across the x axis and then Reflects the result through the line x=y (0, 1) y y (1, 0) x (1, 0) x (-1,0) (0, 1) What is the matrix that performs this transformation?
100 Composition
101 Composition reflection across x axis reflection in line y=x composition
102 Composition y y reflection across x axis (0, 1) (1, 0) x (1, 0) x reflection in line y=x (0, 1) composition
103 Composition y y reflection across x axis (0, 1) (1, 0) x (1, 0) x reflection in line y=x composition y (0, 1) (1, 0) x (-1,0) (0, 1)
104 Composition y y reflection across x axis (0, 1) (1, 0) x (1, 0) x reflection in line y=x composition y (0, 1) (0, 1) (1, 0) x (-1,0)
105 Composition y y reflection across x axis (0, 1) (1, 0) x (1, 0) x reflection in line y=x composition y (0, 1) (0, 1) (1, 0) x (-1,0)
106 Composition as Matrix Multiplication
107 Composition as Matrix Multiplication Reflect the unit square through the line x=y and then reflect the result across the x axis Reflect the unit square across the x axis and the reflect the result through the line x=y
108 Composition as Matrix Multiplication Reflect the unit square through the line x=y and then reflect the result across the x axis = Reflect the unit square across the x axis and the reflect the result through the line x=y
109 Composition as Matrix Multiplication Reflect the unit square through the line x=y and then reflect the result across the x axis = Reflect the unit square across the x axis and the reflect the result through the line x=y =
110 Inverses
111 Inverses What is the matrix that takes the unit square to the parallelogram?
112 Inverses What is the matrix that takes the unit square to the parallelogram? What is the matrix that takes the parallelogram to the unit square?
113 Inverses What is the matrix that takes the unit square to the parallelogram? What is the matrix that takes the parallelogram to the unit square? (0, 1) y (6, 6) (2, 4) (4, 2) (1, 0) x (0 0)
114 Inverses What is the matrix that takes the unit square to the parallelogram? (0, 1) y (6, 6) (2, 4) (4, 2) (1, 0) x (0 0) What is the matrix that takes the parallelogram to the unit square?
115 Inverses What is the matrix that takes the unit square to the parallelogram? (0, 1) y (2, 4) (4, 2) (6, 6) (1, 0) x (0 0) What is the matrix that takes the parallelogram to the unit square?
116 Inverses What is the matrix that takes the unit square to the parallelogram? (0, 1) y (1, 0) x (2, 4) (0 0) (4, 2) (6, 6) What is the matrix that takes the parallelogram to the unit square?
117 The matrix a c b d ( b, d ) transforms the unit square into the (0 0) parallelogram with vertices (0,0) (a,c) (b,d) (a+b,c+d) ( a, c) ( a+b, c+d )
118 The matrix a c b d ( b, d ) transforms the unit square into the (0 0) parallelogram with vertices (0,0) (a,c) (b,d) (a+b,c+d) The matrix 1 ad bc d c b a transforms the parallelogram back into the unit square ( a, c) ( a+b, c+d )
119 The matrix Determinants transforms the unit square to the parallelogram shown.
120 The matrix Determinants transforms the unit square to the parallelogram shown. What is the area of the parallelogram?
121 The matrix Determinants transforms the unit square to the parallelogram shown. What is the area of the parallelogram? Area = 5
122 The magnification factor of 5 area of the image region area of the original region remains the same for all geometric figures transformed by the matrix
123 The matrix a c b d transforms the unit square into the parallelogram with (0 0) ( b, d ) vertices (0,0) (a,c) (b,d) (a+b,c+d) ( a, c) ( a+b, c+d )
124 The matrix a c b d transforms the unit square into the parallelogram with (0 0) ( b, d ) vertices (0,0) (a,c) (b,d) (a+b,c+d) ( a, c) ( a+b, c+d ) Its area is...
125 The matrix a c b d transforms the unit square into the parallelogram with (0 0) ( b, d ) vertices (0,0) (a,c) (b,d) (a+b,c+d) ( a, c) ( a+b, c+d ) Its area is... ad-bc
126 The matrix a c b d transforms the unit square into the parallelogram with (0 0) ( b, d ) vertices (0,0) (a,c) (b,d) (a+b,c+d) ( a, c) ( a+b, c+d ) Its area is... ad-bc which is the absolute value of the determinant of the matrix.
127 If we have an affine transformation T x y = a b c d x y + e f and transform a region S in the plane the area of the transformed region T(S) is the area of S times ad-bc
128 If we have an affine transformation T x y = a b c d x y + e f and transform a region S in the plane the area of the transformed region T(S) is the area of S times ad-bc The translation vector does not affect the area
129 Eigenvalues and Eigenvectors The matrix sends the unit square to the parallelogram shown with area of 2.
130 There is a better way of viewing the area relationships...
131 There is a better way of viewing the area relationships... Under
132 Under There is a better way of viewing the area relationships...
133 Under There is a better way of viewing the area relationships...
134 The matrix sends the unit square to the parallelogram shown.
135 Again there is a better way of viewing this
136 Again there is a better way of viewing this Under
137 Again there is a better way of viewing this Under = = 4 1 1
138 Again there is a better way of viewing this Under = = With this view, the scaling relationships are clear.
139
140 Eigenvectors are vectors that point in the same (or opposite) direction before and after multiplication by the matrix.
141 Eigenvectors are vectors that point in the same (or opposite) direction before and after multiplication by the matrix. Multiplication may change the length of the vector
142 Eigenvectors are vectors that point in the same (or opposite) direction before and after multiplication by the matrix. Multiplication may change the length of the vector The multiplication factors associated with each eigenvector is the eigenvalue for that eigenvector.
143 For
144 For is an eigenvector with eigenvalue 1 1 0
145 For is an eigenvector with eigenvalue is an eigenvector with eigenvalue 2 1 1
146 For = = 4 1 1
147 For = = is an eigenvector with eigenvalue 2
148 For = = is an eigenvector with eigenvalue 2 is an eigenvector with eigenvalue 4
149
150 Rotation almost always implies no real eigenvalues
151 Rotation almost always implies no real eigenvalues Are there rotations with real eigenvalues?
152 Rotation almost always implies no real eigenvalues Are there rotations with real eigenvalues? Shrinking or stretching without rotating or flipping means there are two or there are infinitely many eigenvectors
153 Rotation almost always implies no real eigenvalues Are there rotations with real eigenvalues? Shrinking or stretching without rotating or flipping means there are two or there are infinitely many eigenvectors Flipping gives both a positive and negative eigenvalue and two sets of eigenvectors
154 Rotation almost always implies no real eigenvalues Are there rotations with real eigenvalues? Shrinking or stretching without rotating or flipping means there are two or there are infinitely many eigenvectors Flipping gives both a positive and negative eigenvalue and two sets of eigenvectors Shear transformations correspond to a deficient eigenspace
155 Fractal Dimension An object of Dimension D can be thought of as composed of n copies, each copy scaled down by a factor of r
156 Fractal Dimension An object of Dimension D can be thought of as composed of n copies, each copy scaled down by a factor of r A 1 inch square is made up of 4 half inch squares
157 Fractal Dimension An object of Dimension D can be thought of as composed of n copies, each copy scaled down by a factor of r A 1 inch square is made up of 4 half inch squares A 1 inch cube is made up of 64 quarter inch cubes
158 Fractal Dimension An object of Dimension D can be thought of as composed of n copies, each copy scaled down by a factor of r A 1 inch square is made up of 4 half inch squares A 1 inch cube is made up of 64 quarter inch cubes n = r D
159 Fractal Dimension An object of Dimension D can be thought of as composed of n copies, each copy scaled down by a factor of r A 1 inch square is made up of 4 half inch squares A 1 inch cube is made up of 64 quarter inch cubes n = r D D = logn logr
160 Dimension of Sierpinski Triangle The Sierpinski Triangle is composed of 3 half-sized version of itself It s fractal dimension is D = log3 log( 1 ) = log3 2 log
161 Transformations of the form r cosθ rsinθ r sinθ rcosθ rcosθ r sinθ rsinθ r cosθ map the unit square to an rxr square Transformations of the form a b b a a b b a map the unit square to an rxr square where r = det M
162 Transformations of the form a b b a a b b a are called similitudes A fractal that is generated by n similitudes with scale factors r1,r2,r3,...,rn has dimension D where 1 = r 1 D + r 2 D + r 3 D + + r n D
163 Final Project
164 Final Project What are the matrices that transform the unit square to...
165
166
167
168
169

170
171
172
173
174
175
176
177 Acknowledgments Annalisa Crannell (Franklin and Marshall College) Viewpoints (Workshop on Mathematics and Art) Peter Van Roy: Fractasketch Ron Kneusel: Fractal Lab Kit Denvir Consultancy: Fractal Generator
MATH 423 Linear Algebra II Lecture 20: Geometry of linear transformations. Eigenvalues and eigenvectors. Characteristic polynomial.
 MATH 423 Linear Algebra II Lecture 20: Geometry of linear transformations. Eigenvalues and eigenvectors. Characteristic polynomial. Geometric properties of determinants 2 2 determinants and plane geometry
MATH 423 Linear Algebra II Lecture 20: Geometry of linear transformations. Eigenvalues and eigenvectors. Characteristic polynomial. Geometric properties of determinants 2 2 determinants and plane geometry
Take a line segment of length one unit and divide it into N equal old length. Take a square (dimension 2) of area one square unit and divide
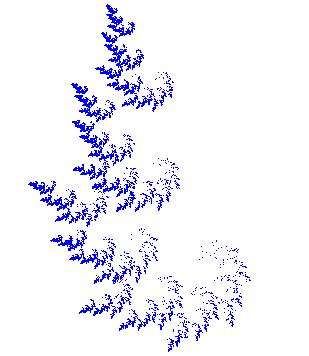
 of area one square unit and divide") Fractal Geometr A Fractal is a geometric object whose dimension is fractional Most fractals are self similar, that is when an small part of a fractal is magnified the result resembles the original fractal
Fractal Geometr A Fractal is a geometric object whose dimension is fractional Most fractals are self similar, that is when an small part of a fractal is magnified the result resembles the original fractal
LINEAR ALGEBRA KNOWLEDGE SURVEY
 LINEAR ALGEBRA KNOWLEDGE SURVEY Instructions: This is a Knowledge Survey. For this assignment, I am only interested in your level of confidence about your ability to do the tasks on the following pages.
LINEAR ALGEBRA KNOWLEDGE SURVEY Instructions: This is a Knowledge Survey. For this assignment, I am only interested in your level of confidence about your ability to do the tasks on the following pages.
Homework 2. Solutions T =
 Homework. s Let {e x, e y, e z } be an orthonormal basis in E. Consider the following ordered triples: a) {e x, e x + e y, 5e z }, b) {e y, e x, 5e z }, c) {e y, e x, e z }, d) {e y, e x, 5e z }, e) {
Homework. s Let {e x, e y, e z } be an orthonormal basis in E. Consider the following ordered triples: a) {e x, e x + e y, 5e z }, b) {e y, e x, 5e z }, c) {e y, e x, e z }, d) {e y, e x, 5e z }, e) {
Week Quadratic forms. Principal axes theorem. Text reference: this material corresponds to parts of sections 5.5, 8.2,
 Math 051 W008 Margo Kondratieva Week 10-11 Quadratic forms Principal axes theorem Text reference: this material corresponds to parts of sections 55, 8, 83 89 Section 41 Motivation and introduction Consider
Math 051 W008 Margo Kondratieva Week 10-11 Quadratic forms Principal axes theorem Text reference: this material corresponds to parts of sections 55, 8, 83 89 Section 41 Motivation and introduction Consider
STRAND J: TRANSFORMATIONS, VECTORS and MATRICES
 Mathematics SKE, Strand J STRAND J: TRANSFORMATIONS, VECTORS and MATRICES J4 Matrices Text Contents * * * * Section J4. Matrices: Addition and Subtraction J4.2 Matrices: Multiplication J4.3 Inverse Matrices:
Mathematics SKE, Strand J STRAND J: TRANSFORMATIONS, VECTORS and MATRICES J4 Matrices Text Contents * * * * Section J4. Matrices: Addition and Subtraction J4.2 Matrices: Multiplication J4.3 Inverse Matrices:
Mathematical Structures for Computer Graphics Steven J. Janke John Wiley & Sons, 2015 ISBN: Exercise Answers
 Mathematical Structures for Computer Graphics Steven J. Janke John Wiley & Sons, 2015 ISBN: 978-1-118-71219-1 Updated /17/15 Exercise Answers Chapter 1 1. Four right-handed systems: ( i, j, k), ( i, j,
Mathematical Structures for Computer Graphics Steven J. Janke John Wiley & Sons, 2015 ISBN: 978-1-118-71219-1 Updated /17/15 Exercise Answers Chapter 1 1. Four right-handed systems: ( i, j, k), ( i, j,
(A B) 2 + (A B) 2. and factor the result.
 2 + (A B) 2. and factor the result.") Transformational Geometry of the Plane (Master Plan) Day 1. Some Coordinate Geometry. Cartesian (rectangular) coordinates on the plane. What is a line segment? What is a (right) triangle? State and prove
Transformational Geometry of the Plane (Master Plan) Day 1. Some Coordinate Geometry. Cartesian (rectangular) coordinates on the plane. What is a line segment? What is a (right) triangle? State and prove
Chapter 8. Rigid transformations
 Chapter 8. Rigid transformations We are about to start drawing figures in 3D. There are no built-in routines for this purpose in PostScript, and we shall have to start more or less from scratch in extending
Chapter 8. Rigid transformations We are about to start drawing figures in 3D. There are no built-in routines for this purpose in PostScript, and we shall have to start more or less from scratch in extending
NOTES ON LINEAR ALGEBRA CLASS HANDOUT
 NOTES ON LINEAR ALGEBRA CLASS HANDOUT ANTHONY S. MAIDA CONTENTS 1. Introduction 2 2. Basis Vectors 2 3. Linear Transformations 2 3.1. Example: Rotation Transformation 3 4. Matrix Multiplication and Function
NOTES ON LINEAR ALGEBRA CLASS HANDOUT ANTHONY S. MAIDA CONTENTS 1. Introduction 2 2. Basis Vectors 2 3. Linear Transformations 2 3.1. Example: Rotation Transformation 3 4. Matrix Multiplication and Function
Some linear transformations on R 2 Math 130 Linear Algebra D Joyce, Fall 2013
 Some linear transformations on R 2 Math 3 Linear Algebra D Joce, Fall 23 Let s look at some some linear transformations on the plane R 2. We ll look at several kinds of operators on R 2 including reflections,
Some linear transformations on R 2 Math 3 Linear Algebra D Joce, Fall 23 Let s look at some some linear transformations on the plane R 2. We ll look at several kinds of operators on R 2 including reflections,
CHAPTER 7: Systems and Inequalities
 (Exercises for Chapter 7: Systems and Inequalities) E.7.1 CHAPTER 7: Systems and Inequalities (A) means refer to Part A, (B) means refer to Part B, etc. (Calculator) means use a calculator. Otherwise,
(Exercises for Chapter 7: Systems and Inequalities) E.7.1 CHAPTER 7: Systems and Inequalities (A) means refer to Part A, (B) means refer to Part B, etc. (Calculator) means use a calculator. Otherwise,
High School Mathematics Contest Spring 2006 Draft March 27, 2006
 High School Mathematics Contest Spring 2006 Draft March 27, 2006 1. Going into the final exam, which will count as two tests, Courtney has test scores of 80, 81, 73, 65 and 91. What score does Courtney
High School Mathematics Contest Spring 2006 Draft March 27, 2006 1. Going into the final exam, which will count as two tests, Courtney has test scores of 80, 81, 73, 65 and 91. What score does Courtney
Computationally, diagonal matrices are the easiest to work with. With this idea in mind, we introduce similarity:
 Diagonalization We have seen that diagonal and triangular matrices are much easier to work with than are most matrices For example, determinants and eigenvalues are easy to compute, and multiplication
Diagonalization We have seen that diagonal and triangular matrices are much easier to work with than are most matrices For example, determinants and eigenvalues are easy to compute, and multiplication
Honors Advanced Mathematics Determinants page 1
 Determinants page 1 Determinants For every square matrix A, there is a number called the determinant of the matrix, denoted as det(a) or A. Sometimes the bars are written just around the numbers of the
Determinants page 1 Determinants For every square matrix A, there is a number called the determinant of the matrix, denoted as det(a) or A. Sometimes the bars are written just around the numbers of the
Introduction to Matrix Algebra
 Introduction to Matrix Algebra August 18, 2010 1 Vectors 1.1 Notations A p-dimensional vector is p numbers put together. Written as x 1 x =. x p. When p = 1, this represents a point in the line. When p
Introduction to Matrix Algebra August 18, 2010 1 Vectors 1.1 Notations A p-dimensional vector is p numbers put together. Written as x 1 x =. x p. When p = 1, this represents a point in the line. When p
3D GEOMETRY. 3D-Geometry. If α, β, γ are angle made by a line with positive directions of x, y and z. axes respectively show that = 2.
 D GEOMETRY ) If α β γ are angle made by a line with positive directions of x y and z axes respectively show that i) sin α + sin β + sin γ ii) cos α + cos β + cos γ + 0 Solution:- i) are angle made by a
D GEOMETRY ) If α β γ are angle made by a line with positive directions of x y and z axes respectively show that i) sin α + sin β + sin γ ii) cos α + cos β + cos γ + 0 Solution:- i) are angle made by a
Vector Basics, with Exercises
 Math 230 Spring 09 Vector Basics, with Exercises This sheet is designed to follow the GeoGebra Introduction to Vectors. It includes a summary of some of the properties of vectors, as well as homework exercises.
Math 230 Spring 09 Vector Basics, with Exercises This sheet is designed to follow the GeoGebra Introduction to Vectors. It includes a summary of some of the properties of vectors, as well as homework exercises.
MATH 1553-C MIDTERM EXAMINATION 3
 MATH 553-C MIDTERM EXAMINATION 3 Name GT Email @gatech.edu Please read all instructions carefully before beginning. Please leave your GT ID card on your desk until your TA scans your exam. Each problem
MATH 553-C MIDTERM EXAMINATION 3 Name GT Email @gatech.edu Please read all instructions carefully before beginning. Please leave your GT ID card on your desk until your TA scans your exam. Each problem
Mathematics 1EM/1ES/1FM/1FS Notes, weeks 18-23
 2 MATRICES Mathematics EM/ES/FM/FS Notes, weeks 8-2 Carl Dettmann, version May 2, 22 2 Matrices 2 Basic concepts See: AJ Sadler, DWS Thorning, Understanding Pure Mathematics, pp 59ff In mathematics, a
2 MATRICES Mathematics EM/ES/FM/FS Notes, weeks 8-2 Carl Dettmann, version May 2, 22 2 Matrices 2 Basic concepts See: AJ Sadler, DWS Thorning, Understanding Pure Mathematics, pp 59ff In mathematics, a
Homogeneous Coordinates
 Homogeneous Coordinates Basilio Bona DAUIN-Politecnico di Torino October 2013 Basilio Bona (DAUIN-Politecnico di Torino) Homogeneous Coordinates October 2013 1 / 32 Introduction Homogeneous coordinates
Homogeneous Coordinates Basilio Bona DAUIN-Politecnico di Torino October 2013 Basilio Bona (DAUIN-Politecnico di Torino) Homogeneous Coordinates October 2013 1 / 32 Introduction Homogeneous coordinates
HOMEWORK PROBLEMS FROM STRANG S LINEAR ALGEBRA AND ITS APPLICATIONS (4TH EDITION)
") HOMEWORK PROBLEMS FROM STRANG S LINEAR ALGEBRA AND ITS APPLICATIONS (4TH EDITION) PROFESSOR STEVEN MILLER: BROWN UNIVERSITY: SPRING 2007 1. CHAPTER 1: MATRICES AND GAUSSIAN ELIMINATION Page 9, # 3: Describe
HOMEWORK PROBLEMS FROM STRANG S LINEAR ALGEBRA AND ITS APPLICATIONS (4TH EDITION) PROFESSOR STEVEN MILLER: BROWN UNIVERSITY: SPRING 2007 1. CHAPTER 1: MATRICES AND GAUSSIAN ELIMINATION Page 9, # 3: Describe
Exam Study Questions for PS10-11 (*=solutions given in the back of the textbook)
") Exam Study Questions for PS0- (*=solutions given in the back of the textbook) p 59, Problem p 59 Problem 3 (a)*, 3(b) 3(c) p 55, Problem p547, verify the solutions Eq (8) to the Marcov Processes being
Exam Study Questions for PS0- (*=solutions given in the back of the textbook) p 59, Problem p 59 Problem 3 (a)*, 3(b) 3(c) p 55, Problem p547, verify the solutions Eq (8) to the Marcov Processes being
Transformation of functions
 Transformation of functions Translations Dilations (from the x axis) Dilations (from the y axis) Reflections (in the x axis) Reflections (in the y axis) Summary Applying transformations Finding equations
Transformation of functions Translations Dilations (from the x axis) Dilations (from the y axis) Reflections (in the x axis) Reflections (in the y axis) Summary Applying transformations Finding equations
Problem Set # 1 Solution, 18.06
 Problem Set # 1 Solution, 1.06 For grading: Each problem worths 10 points, and there is points of extra credit in problem. The total maximum is 100. 1. (10pts) In Lecture 1, Prof. Strang drew the cone
Problem Set # 1 Solution, 1.06 For grading: Each problem worths 10 points, and there is points of extra credit in problem. The total maximum is 100. 1. (10pts) In Lecture 1, Prof. Strang drew the cone
EXERCISES ON DETERMINANTS, EIGENVALUES AND EIGENVECTORS. 1. Determinants
 EXERCISES ON DETERMINANTS, EIGENVALUES AND EIGENVECTORS. Determinants Ex... Let A = 0 4 4 2 0 and B = 0 3 0. (a) Compute 0 0 0 0 A. (b) Compute det(2a 2 B), det(4a + B), det(2(a 3 B 2 )). 0 t Ex..2. For
EXERCISES ON DETERMINANTS, EIGENVALUES AND EIGENVECTORS. Determinants Ex... Let A = 0 4 4 2 0 and B = 0 3 0. (a) Compute 0 0 0 0 A. (b) Compute det(2a 2 B), det(4a + B), det(2(a 3 B 2 )). 0 t Ex..2. For
1. Matrix multiplication and Pauli Matrices: Pauli matrices are the 2 2 matrices. 1 0 i 0. 0 i
 Problems in basic linear algebra Science Academies Lecture Workshop at PSGRK College Coimbatore, June 22-24, 2016 Govind S. Krishnaswami, Chennai Mathematical Institute http://www.cmi.ac.in/~govind/teaching,
Problems in basic linear algebra Science Academies Lecture Workshop at PSGRK College Coimbatore, June 22-24, 2016 Govind S. Krishnaswami, Chennai Mathematical Institute http://www.cmi.ac.in/~govind/teaching,
Lecture 4: Affine Transformations. for Satan himself is transformed into an angel of light. 2 Corinthians 11:14
 Lecture 4: Affine Transformations for Satan himself is transformed into an angel of light. 2 Corinthians 11:14 1. Transformations Transformations are the lifeblood of geometry. Euclidean geometry is based
Lecture 4: Affine Transformations for Satan himself is transformed into an angel of light. 2 Corinthians 11:14 1. Transformations Transformations are the lifeblood of geometry. Euclidean geometry is based
Regent College. Maths Department. Core Mathematics 4. Vectors
 Regent College Maths Department Core Mathematics 4 Vectors Page 1 Vectors By the end of this unit you should be able to find: a unit vector in the direction of a. the distance between two points (x 1,
Regent College Maths Department Core Mathematics 4 Vectors Page 1 Vectors By the end of this unit you should be able to find: a unit vector in the direction of a. the distance between two points (x 1,
COMP 175 COMPUTER GRAPHICS. Lecture 04: Transform 1. COMP 175: Computer Graphics February 9, Erik Anderson 04 Transform 1
 Lecture 04: Transform COMP 75: Computer Graphics February 9, 206 /59 Admin Sign up via email/piazza for your in-person grading Anderson@cs.tufts.edu 2/59 Geometric Transform Apply transforms to a hierarchy
Lecture 04: Transform COMP 75: Computer Graphics February 9, 206 /59 Admin Sign up via email/piazza for your in-person grading Anderson@cs.tufts.edu 2/59 Geometric Transform Apply transforms to a hierarchy
A FIRST COURSE IN LINEAR ALGEBRA. An Open Text by Ken Kuttler. Lecture Notes by Karen Seyffarth Adapted by LYRYX SERVICE COURSE SOLUTION
 A FIRST COURSE IN LINEAR ALGEBRA An Open Text by Ken Kuttler R n : Vectors Lecture Notes by Karen Seyffarth Adapted by LYRYX SERVICE COURSE SOLUTION Attribution-NonCommercial-ShareAlike (CC BY-NC-SA) This
A FIRST COURSE IN LINEAR ALGEBRA An Open Text by Ken Kuttler R n : Vectors Lecture Notes by Karen Seyffarth Adapted by LYRYX SERVICE COURSE SOLUTION Attribution-NonCommercial-ShareAlike (CC BY-NC-SA) This
Fractal Tilings. Katie Moe and Andrea Brown. December 14, 2006
 Fractal Tilings Katie Moe and Andrea Brown December 4, 26 Abstract In this paper we will discuss how to create fractal tilings from a few simple matrices and formulas. We will do this by drawing several
Fractal Tilings Katie Moe and Andrea Brown December 4, 26 Abstract In this paper we will discuss how to create fractal tilings from a few simple matrices and formulas. We will do this by drawing several
Introduction Examples of Fractal Tilings Creating the Tilings Tiles with Radial Symmetry Similarity Maps Variations.
 Fractal Tilings Katie Moe and Andrea Brown December 13, 2006 Introduction Examples of Fractal Tilings Example 1 Example 2 Table of Contents Creating the Tilings Short Summary of Important Ideas Example
Fractal Tilings Katie Moe and Andrea Brown December 13, 2006 Introduction Examples of Fractal Tilings Example 1 Example 2 Table of Contents Creating the Tilings Short Summary of Important Ideas Example
11.1 Vectors in the plane
 11.1 Vectors in the plane What is a vector? It is an object having direction and length. Geometric way to represent vectors It is represented by an arrow. The direction of the arrow is the direction of
11.1 Vectors in the plane What is a vector? It is an object having direction and length. Geometric way to represent vectors It is represented by an arrow. The direction of the arrow is the direction of
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer
 CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Spring Quarter 2016 Announcements Project 1 due next Friday at
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Spring Quarter 2016 Announcements Project 1 due next Friday at
y = x 3 and y = 2x 2 x. 2x 2 x = x 3 x 3 2x 2 + x = 0 x(x 2 2x + 1) = 0 x(x 1) 2 = 0 x = 0 and x = (x 3 (2x 2 x)) dx
 = 0 x(x 1) 2 = 0 x = 0 and x = (x 3 (2x 2 x)) dx") Millersville University Name Answer Key Mathematics Department MATH 2, Calculus II, Final Examination May 4, 2, 8:AM-:AM Please answer the following questions. Your answers will be evaluated on their correctness,
Millersville University Name Answer Key Mathematics Department MATH 2, Calculus II, Final Examination May 4, 2, 8:AM-:AM Please answer the following questions. Your answers will be evaluated on their correctness,
Lecture Notes: Eigenvalues and Eigenvectors. 1 Definitions. 2 Finding All Eigenvalues
 Lecture Notes: Eigenvalues and Eigenvectors Yufei Tao Department of Computer Science and Engineering Chinese University of Hong Kong taoyf@cse.cuhk.edu.hk 1 Definitions Let A be an n n matrix. If there
Lecture Notes: Eigenvalues and Eigenvectors Yufei Tao Department of Computer Science and Engineering Chinese University of Hong Kong taoyf@cse.cuhk.edu.hk 1 Definitions Let A be an n n matrix. If there
MATH 1553, C. JANKOWSKI MIDTERM 3
 MATH 1553, C JANKOWSKI MIDTERM 3 Name GT Email @gatechedu Write your section number (E6-E9) here: Please read all instructions carefully before beginning Please leave your GT ID card on your desk until
MATH 1553, C JANKOWSKI MIDTERM 3 Name GT Email @gatechedu Write your section number (E6-E9) here: Please read all instructions carefully before beginning Please leave your GT ID card on your desk until
NOTES ON BARNSLEY FERN
 NOTES ON BARNSLEY FERN ERIC MARTIN 1. Affine transformations An affine transformation on the plane is a mapping T that preserves collinearity and ratios of distances: given two points A and B, if C is
NOTES ON BARNSLEY FERN ERIC MARTIN 1. Affine transformations An affine transformation on the plane is a mapping T that preserves collinearity and ratios of distances: given two points A and B, if C is
ALLEN PARK HIGH SCHOOL Second Semester Review
 Algebra Semester Review Spring 0 ALLEN PARK HIGH SCHOOL Second Semester Review Algebra Spring 0 Algebra Semester Review Spring 0 Select the best answer for all questions. For questions through use the
Algebra Semester Review Spring 0 ALLEN PARK HIGH SCHOOL Second Semester Review Algebra Spring 0 Algebra Semester Review Spring 0 Select the best answer for all questions. For questions through use the
Distance. Warm Ups. Learning Objectives I can find the distance between two points. Football Problem: Bailey. Watson
 Distance Warm Ups Learning Objectives I can find the distance between two points. Football Problem: Bailey Watson. Find the distance between the points (, ) and (4, 5). + 4 = c 9 + 6 = c 5 = c 5 = c. Using
Distance Warm Ups Learning Objectives I can find the distance between two points. Football Problem: Bailey Watson. Find the distance between the points (, ) and (4, 5). + 4 = c 9 + 6 = c 5 = c 5 = c. Using
The Study of Concurrent Forces with the Force Table
 The Study of Concurrent Forces with the Force Table Apparatus: Force table with 4 pulleys, centering ring and string, 50 g weight hangers, slotted weights, protractors, and rulers. Discussion: The force
The Study of Concurrent Forces with the Force Table Apparatus: Force table with 4 pulleys, centering ring and string, 50 g weight hangers, slotted weights, protractors, and rulers. Discussion: The force
USING THE RANDOM ITERATION ALGORITHM TO CREATE FRACTALS
 USING THE RANDOM ITERATION ALGORITHM TO CREATE FRACTALS UNIVERSITY OF MARYLAND DIRECTED READING PROGRAM FALL 205 BY ADAM ANDERSON THE SIERPINSKI GASKET 2 Stage 0: A 0 = 2 22 A 0 = Stage : A = 2 = 4 A
USING THE RANDOM ITERATION ALGORITHM TO CREATE FRACTALS UNIVERSITY OF MARYLAND DIRECTED READING PROGRAM FALL 205 BY ADAM ANDERSON THE SIERPINSKI GASKET 2 Stage 0: A 0 = 2 22 A 0 = Stage : A = 2 = 4 A
Section 13.4 The Cross Product
 Section 13.4 The Cross Product Multiplying Vectors 2 In this section we consider the more technical multiplication which can be defined on vectors in 3-space (but not vectors in 2-space). 1. Basic Definitions
Section 13.4 The Cross Product Multiplying Vectors 2 In this section we consider the more technical multiplication which can be defined on vectors in 3-space (but not vectors in 2-space). 1. Basic Definitions
Dot Products. K. Behrend. April 3, Abstract A short review of some basic facts on the dot product. Projections. The spectral theorem.
 Dot Products K. Behrend April 3, 008 Abstract A short review of some basic facts on the dot product. Projections. The spectral theorem. Contents The dot product 3. Length of a vector........................
Dot Products K. Behrend April 3, 008 Abstract A short review of some basic facts on the dot product. Projections. The spectral theorem. Contents The dot product 3. Length of a vector........................
1.4 Linear Transformation I
 .4. LINEAR TRANSFORMATION I.4 Linear Transformation I MATH 9 FALL 99 PRELIM # 5 9FA9PQ5.tex.4. a) Consider the vector transformation y f(x) from V to V such that if y (y ; y ); x (x ; x ); y (x + x ) p
.4. LINEAR TRANSFORMATION I.4 Linear Transformation I MATH 9 FALL 99 PRELIM # 5 9FA9PQ5.tex.4. a) Consider the vector transformation y f(x) from V to V such that if y (y ; y ); x (x ; x ); y (x + x ) p
Diagonalization of Matrix
 of Matrix King Saud University August 29, 2018 of Matrix Table of contents 1 2 of Matrix Definition If A M n (R) and λ R. We say that λ is an eigenvalue of the matrix A if there is X R n \ {0} such that
of Matrix King Saud University August 29, 2018 of Matrix Table of contents 1 2 of Matrix Definition If A M n (R) and λ R. We say that λ is an eigenvalue of the matrix A if there is X R n \ {0} such that
IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET
 IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET This is a (not quite comprehensive) list of definitions and theorems given in Math 1553. Pay particular attention to the ones in red. Study Tip For each
IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET This is a (not quite comprehensive) list of definitions and theorems given in Math 1553. Pay particular attention to the ones in red. Study Tip For each
(a) II and III (b) I (c) I and III (d) I and II and III (e) None are true.
 II and III (b) I (c) I and III (d) I and II and III (e) None are true.") 1 Which of the following statements is always true? I The null space of an m n matrix is a subspace of R m II If the set B = {v 1,, v n } spans a vector space V and dimv = n, then B is a basis for V III
1 Which of the following statements is always true? I The null space of an m n matrix is a subspace of R m II If the set B = {v 1,, v n } spans a vector space V and dimv = n, then B is a basis for V III
Math Bootcamp An p-dimensional vector is p numbers put together. Written as. x 1 x =. x p
 Math Bootcamp 2012 1 Review of matrix algebra 1.1 Vectors and rules of operations An p-dimensional vector is p numbers put together. Written as x 1 x =. x p. When p = 1, this represents a point in the
Math Bootcamp 2012 1 Review of matrix algebra 1.1 Vectors and rules of operations An p-dimensional vector is p numbers put together. Written as x 1 x =. x p. When p = 1, this represents a point in the
The choice of origin, axes, and length is completely arbitrary.
 Polar Coordinates There are many ways to mark points in the plane or in 3-dim space for purposes of navigation. In the familiar rectangular coordinate system, a point is chosen as the origin and a perpendicular
Polar Coordinates There are many ways to mark points in the plane or in 3-dim space for purposes of navigation. In the familiar rectangular coordinate system, a point is chosen as the origin and a perpendicular
Chapter 3 Summary 3.1. Determining the Perimeter and Area of Rectangles and Squares on the Coordinate Plane. Example
 Chapter Summar Ke Terms bases of a trapezoid (.) legs of a trapezoid (.) composite figure (.5).1 Determining the Perimeter and Area of Rectangles and Squares on the Coordinate Plane The perimeter or area
Chapter Summar Ke Terms bases of a trapezoid (.) legs of a trapezoid (.) composite figure (.5).1 Determining the Perimeter and Area of Rectangles and Squares on the Coordinate Plane The perimeter or area
Mathematics SL. Mock Exam 2014 PAPER 2. Instructions: The use of graphing calculator is allowed.
 Mock Exam 2014 Mathematics SL PAPER 2 Instructions: The use of graphing calculator is allowed Show working when possible (even when using a graphing calculator) Give your answers in exact form or round
Mock Exam 2014 Mathematics SL PAPER 2 Instructions: The use of graphing calculator is allowed Show working when possible (even when using a graphing calculator) Give your answers in exact form or round
- 1 - Items related to expected use of technology appear in bold italics.
 - 1 - Items related to expected use of technology appear in bold italics. Operating with Geometric and Cartesian Vectors Determining Intersections of Lines and Planes in Three- Space Similar content as
- 1 - Items related to expected use of technology appear in bold italics. Operating with Geometric and Cartesian Vectors Determining Intersections of Lines and Planes in Three- Space Similar content as
Properties of Linear Transformations from R n to R m
 Properties of Linear Transformations from R n to R m MATH 322, Linear Algebra I J. Robert Buchanan Department of Mathematics Spring 2015 Topic Overview Relationship between the properties of a matrix transformation
Properties of Linear Transformations from R n to R m MATH 322, Linear Algebra I J. Robert Buchanan Department of Mathematics Spring 2015 Topic Overview Relationship between the properties of a matrix transformation
CHAPTER 2: VECTORS IN 3D
 CHAPTER 2: VECTORS IN 3D 2.1 DEFINITION AND REPRESENTATION OF VECTORS A vector in three dimensions is a quantity that is determined by its magnitude and direction. Vectors are added and multiplied by numbers
CHAPTER 2: VECTORS IN 3D 2.1 DEFINITION AND REPRESENTATION OF VECTORS A vector in three dimensions is a quantity that is determined by its magnitude and direction. Vectors are added and multiplied by numbers
MATH 304 Linear Algebra Lecture 20: The Gram-Schmidt process (continued). Eigenvalues and eigenvectors.
. Eigenvalues and eigenvectors.") MATH 304 Linear Algebra Lecture 20: The Gram-Schmidt process (continued). Eigenvalues and eigenvectors. Orthogonal sets Let V be a vector space with an inner product. Definition. Nonzero vectors v 1,v
MATH 304 Linear Algebra Lecture 20: The Gram-Schmidt process (continued). Eigenvalues and eigenvectors. Orthogonal sets Let V be a vector space with an inner product. Definition. Nonzero vectors v 1,v
Lecture 11: Eigenvalues and Eigenvectors
 Lecture : Eigenvalues and Eigenvectors De nition.. Let A be a square matrix (or linear transformation). A number λ is called an eigenvalue of A if there exists a non-zero vector u such that A u λ u. ()
Lecture : Eigenvalues and Eigenvectors De nition.. Let A be a square matrix (or linear transformation). A number λ is called an eigenvalue of A if there exists a non-zero vector u such that A u λ u. ()
Information About Ellipses
 Information About Ellipses David Eberly, Geometric Tools, Redmond WA 9805 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International License. To view
Information About Ellipses David Eberly, Geometric Tools, Redmond WA 9805 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International License. To view
STUDENT NAME: STUDENT SIGNATURE: STUDENT ID NUMBER: SECTION NUMBER RECITATION INSTRUCTOR:
 MA262 FINAL EXAM SPRING 2016 MAY 2, 2016 TEST NUMBER 01 INSTRUCTIONS: 1. Do not open the exam booklet until you are instructed to do so. 2. Before you open the booklet fill in the information below and
MA262 FINAL EXAM SPRING 2016 MAY 2, 2016 TEST NUMBER 01 INSTRUCTIONS: 1. Do not open the exam booklet until you are instructed to do so. 2. Before you open the booklet fill in the information below and
Announcements Monday, November 13
 Announcements Monday, November 13 The third midterm is on this Friday, November 17. The exam covers 3.1, 3.2, 5.1, 5.2, 5.3, and 5.5. About half the problems will be conceptual, and the other half computational.
Announcements Monday, November 13 The third midterm is on this Friday, November 17. The exam covers 3.1, 3.2, 5.1, 5.2, 5.3, and 5.5. About half the problems will be conceptual, and the other half computational.
I can use properties of similar triangles to find segment lengths. I can apply proportionality and triangle angle bisector theorems.
 Page! 1 of! 8 Attendance Problems. Solve each proportion. 12 1. 2. 3. 15 = AB 9.5 20 QR = 3.8 4.2 x 5 20 = x + 3 30 4.! y + 7 2y 4 = 3.5 2.8 I can use properties of similar triangles to find segment lengths.
Page! 1 of! 8 Attendance Problems. Solve each proportion. 12 1. 2. 3. 15 = AB 9.5 20 QR = 3.8 4.2 x 5 20 = x + 3 30 4.! y + 7 2y 4 = 3.5 2.8 I can use properties of similar triangles to find segment lengths.
Problem 1: (3 points) Recall that the dot product of two vectors in R 3 is
 Recall that the dot product of two vectors in R 3 is") Linear Algebra, Spring 206 Homework 3 Name: Problem : (3 points) Recall that the dot product of two vectors in R 3 is a x b y = ax + by + cz, c z and this is essentially the same as the matrix multiplication
Linear Algebra, Spring 206 Homework 3 Name: Problem : (3 points) Recall that the dot product of two vectors in R 3 is a x b y = ax + by + cz, c z and this is essentially the same as the matrix multiplication
Matrices and Deformation
 ES 111 Mathematical Methods in the Earth Sciences Matrices and Deformation Lecture Outline 13 - Thurs 9th Nov 2017 Strain Ellipse and Eigenvectors One way of thinking about a matrix is that it operates
ES 111 Mathematical Methods in the Earth Sciences Matrices and Deformation Lecture Outline 13 - Thurs 9th Nov 2017 Strain Ellipse and Eigenvectors One way of thinking about a matrix is that it operates
Math Precalculus Blueprint Assessed Quarter 1
 PO 11. Find approximate solutions for polynomial equations with or without graphing technology. MCWR-S3C2-06 Graphing polynomial functions. MCWR-S3C2-12 Theorems of polynomial functions. MCWR-S3C3-08 Polynomial
PO 11. Find approximate solutions for polynomial equations with or without graphing technology. MCWR-S3C2-06 Graphing polynomial functions. MCWR-S3C2-12 Theorems of polynomial functions. MCWR-S3C3-08 Polynomial
Basics. A VECTOR is a quantity with a specified magnitude and direction. A MATRIX is a rectangular array of quantities
 Some Linear Algebra Basics A VECTOR is a quantity with a specified magnitude and direction Vectors can exist in multidimensional space, with each element of the vector representing a quantity in a different
Some Linear Algebra Basics A VECTOR is a quantity with a specified magnitude and direction Vectors can exist in multidimensional space, with each element of the vector representing a quantity in a different
Extra Problems for Math 2050 Linear Algebra I
 Extra Problems for Math 5 Linear Algebra I Find the vector AB and illustrate with a picture if A = (,) and B = (,4) Find B, given A = (,4) and [ AB = A = (,4) and [ AB = 8 If possible, express x = 7 as
Extra Problems for Math 5 Linear Algebra I Find the vector AB and illustrate with a picture if A = (,) and B = (,4) Find B, given A = (,4) and [ AB = A = (,4) and [ AB = 8 If possible, express x = 7 as
CHAPTER 8: Matrices and Determinants
 (Exercises for Chapter 8: Matrices and Determinants) E.8.1 CHAPTER 8: Matrices and Determinants (A) means refer to Part A, (B) means refer to Part B, etc. Most of these exercises can be done without a
(Exercises for Chapter 8: Matrices and Determinants) E.8.1 CHAPTER 8: Matrices and Determinants (A) means refer to Part A, (B) means refer to Part B, etc. Most of these exercises can be done without a
Modern Geometry Homework.
 Modern Geometry Homework 1 Cramer s rule We now wish to become experts in solving two linear equations in two unknowns over our field F We first recall that a 2 2 matrix a b A = c b its determinant is
Modern Geometry Homework 1 Cramer s rule We now wish to become experts in solving two linear equations in two unknowns over our field F We first recall that a 2 2 matrix a b A = c b its determinant is
Chapter 1: Packing your Suitcase
 Chapter : Packing your Suitcase Lesson.. -. a. Independent variable = distance from end of tube to the wall. Dependent variable = width of field of view. e. The equation depends on the length and diameter
Chapter : Packing your Suitcase Lesson.. -. a. Independent variable = distance from end of tube to the wall. Dependent variable = width of field of view. e. The equation depends on the length and diameter
Rotation of Axes. By: OpenStaxCollege
 Rotation of Axes By: OpenStaxCollege As we have seen, conic sections are formed when a plane intersects two right circular cones aligned tip to tip and extending infinitely far in opposite directions,
Rotation of Axes By: OpenStaxCollege As we have seen, conic sections are formed when a plane intersects two right circular cones aligned tip to tip and extending infinitely far in opposite directions,
ENGI Linear Approximation (2) Page Linear Approximation to a System of Non-Linear ODEs (2)
 Page Linear Approximation to a System of Non-Linear ODEs (2)") ENGI 940 4.06 - Linear Approximation () Page 4. 4.06 Linear Approximation to a System of Non-Linear ODEs () From sections 4.0 and 4.0, the non-linear system dx dy = x = P( x, y), = y = Q( x, y) () with
ENGI 940 4.06 - Linear Approximation () Page 4. 4.06 Linear Approximation to a System of Non-Linear ODEs () From sections 4.0 and 4.0, the non-linear system dx dy = x = P( x, y), = y = Q( x, y) () with
1. In this problem, if the statement is always true, circle T; otherwise, circle F.
 Math 1553, Extra Practice for Midterm 3 (sections 45-65) Solutions 1 In this problem, if the statement is always true, circle T; otherwise, circle F a) T F If A is a square matrix and the homogeneous equation
Math 1553, Extra Practice for Midterm 3 (sections 45-65) Solutions 1 In this problem, if the statement is always true, circle T; otherwise, circle F a) T F If A is a square matrix and the homogeneous equation
Algebra 1 Math Year at a Glance
 Real Operations Equations/Inequalities Relations/Graphing Systems Exponents/Polynomials Quadratics ISTEP+ Radicals Algebra 1 Math Year at a Glance KEY According to the Indiana Department of Education +
Real Operations Equations/Inequalities Relations/Graphing Systems Exponents/Polynomials Quadratics ISTEP+ Radicals Algebra 1 Math Year at a Glance KEY According to the Indiana Department of Education +
0609ge. Geometry Regents Exam AB DE, A D, and B E.
 0609ge 1 Juliann plans on drawing ABC, where the measure of A can range from 50 to 60 and the measure of B can range from 90 to 100. Given these conditions, what is the correct range of measures possible
0609ge 1 Juliann plans on drawing ABC, where the measure of A can range from 50 to 60 and the measure of B can range from 90 to 100. Given these conditions, what is the correct range of measures possible
Generalized Eigenvectors and Jordan Form
 Generalized Eigenvectors and Jordan Form We have seen that an n n matrix A is diagonalizable precisely when the dimensions of its eigenspaces sum to n. So if A is not diagonalizable, there is at least
Generalized Eigenvectors and Jordan Form We have seen that an n n matrix A is diagonalizable precisely when the dimensions of its eigenspaces sum to n. So if A is not diagonalizable, there is at least
Eigenvalues and Eigenvectors
 LECTURE 3 Eigenvalues and Eigenvectors Definition 3.. Let A be an n n matrix. The eigenvalue-eigenvector problem for A is the problem of finding numbers λ and vectors v R 3 such that Av = λv. If λ, v are
LECTURE 3 Eigenvalues and Eigenvectors Definition 3.. Let A be an n n matrix. The eigenvalue-eigenvector problem for A is the problem of finding numbers λ and vectors v R 3 such that Av = λv. If λ, v are
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer
 CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Monday October 3: Discussion Assignment
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Monday October 3: Discussion Assignment
Announcements Wednesday, November 01
 Announcements Wednesday, November 01 WeBWorK 3.1, 3.2 are due today at 11:59pm. The quiz on Friday covers 3.1, 3.2. My office is Skiles 244. Rabinoffice hours are Monday, 1 3pm and Tuesday, 9 11am. Section
Announcements Wednesday, November 01 WeBWorK 3.1, 3.2 are due today at 11:59pm. The quiz on Friday covers 3.1, 3.2. My office is Skiles 244. Rabinoffice hours are Monday, 1 3pm and Tuesday, 9 11am. Section
A-2. Polynomials and Factoring. Section A-2 1
 A- Polynomials and Factoring Section A- 1 What you ll learn about Adding, Subtracting, and Multiplying Polynomials Special Products Factoring Polynomials Using Special Products Factoring Trinomials Factoring
A- Polynomials and Factoring Section A- 1 What you ll learn about Adding, Subtracting, and Multiplying Polynomials Special Products Factoring Polynomials Using Special Products Factoring Trinomials Factoring
THE INVERSE TRIGONOMETRIC FUNCTIONS
 THE INVERSE TRIGONOMETRIC FUNCTIONS Question 1 (**+) Solve the following trigonometric equation ( x ) π + 3arccos + 1 = 0. 1 x = Question (***) It is given that arcsin x = arccos y. Show, by a clear method,
THE INVERSE TRIGONOMETRIC FUNCTIONS Question 1 (**+) Solve the following trigonometric equation ( x ) π + 3arccos + 1 = 0. 1 x = Question (***) It is given that arcsin x = arccos y. Show, by a clear method,
In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation.
 1 2 Linear Systems In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation 21 Matrix ODEs Let and is a scalar A linear function satisfies Linear superposition ) Linear
1 2 Linear Systems In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation 21 Matrix ODEs Let and is a scalar A linear function satisfies Linear superposition ) Linear
IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET
 IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET This is a (not quite comprehensive) list of definitions and theorems given in Math 1553. Pay particular attention to the ones in red. Study Tip For each
IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET This is a (not quite comprehensive) list of definitions and theorems given in Math 1553. Pay particular attention to the ones in red. Study Tip For each
2. Matrix Algebra and Random Vectors
 2. Matrix Algebra and Random Vectors 2.1 Introduction Multivariate data can be conveniently display as array of numbers. In general, a rectangular array of numbers with, for instance, n rows and p columns
2. Matrix Algebra and Random Vectors 2.1 Introduction Multivariate data can be conveniently display as array of numbers. In general, a rectangular array of numbers with, for instance, n rows and p columns
Question: Given an n x n matrix A, how do we find its eigenvalues? Idea: Suppose c is an eigenvalue of A, then what is the determinant of A-cI?
 Section 5. The Characteristic Polynomial Question: Given an n x n matrix A, how do we find its eigenvalues? Idea: Suppose c is an eigenvalue of A, then what is the determinant of A-cI? Property The eigenvalues
Section 5. The Characteristic Polynomial Question: Given an n x n matrix A, how do we find its eigenvalues? Idea: Suppose c is an eigenvalue of A, then what is the determinant of A-cI? Property The eigenvalues
A. 180 B. 108 C. 360 D. 540
 Part I - Multiple Choice - Circle your answer: 1. Find the area of the shaded sector. Q O 8 P A. 2 π B. 4 π C. 8 π D. 16 π 2. An octagon has sides. A. five B. six C. eight D. ten 3. The sum of the interior
Part I - Multiple Choice - Circle your answer: 1. Find the area of the shaded sector. Q O 8 P A. 2 π B. 4 π C. 8 π D. 16 π 2. An octagon has sides. A. five B. six C. eight D. ten 3. The sum of the interior
Mathematics Preliminary Course FINAL EXAMINATION Friday, September 6. General Instructions
 03 Preliminary Course FINAL EXAMINATION Friday, September 6 Mathematics General Instructions o Reading Time 5 minutes. o Working Time 3 hours. o Write using a black pen. o Approved calculators may be used.
03 Preliminary Course FINAL EXAMINATION Friday, September 6 Mathematics General Instructions o Reading Time 5 minutes. o Working Time 3 hours. o Write using a black pen. o Approved calculators may be used.
Practical Linear Algebra: A Geometry Toolbox
 Practical Linear Algebra: A Geometry Toolbox Third edition Chapter 4: Changing Shapes: Linear Maps in 2D Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/pla
Practical Linear Algebra: A Geometry Toolbox Third edition Chapter 4: Changing Shapes: Linear Maps in 2D Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/pla
STEP Support Programme. STEP 2 Matrices Topic Notes
 STEP Support Programme STEP 2 Matrices Topic Notes Definitions............................................. 2 Manipulating Matrices...................................... 3 Transformations.........................................
STEP Support Programme STEP 2 Matrices Topic Notes Definitions............................................. 2 Manipulating Matrices...................................... 3 Transformations.........................................
Reteach 2-3. Graphing Linear Functions. 22 Holt Algebra 2. Name Date Class
 -3 Graphing Linear Functions Use intercepts to sketch the graph of the function 3x 6y 1. The x-intercept is where the graph crosses the x-axis. To find the x-intercept, set y 0 and solve for x. 3x 6y 1
-3 Graphing Linear Functions Use intercepts to sketch the graph of the function 3x 6y 1. The x-intercept is where the graph crosses the x-axis. To find the x-intercept, set y 0 and solve for x. 3x 6y 1
The Law of Averages. MARK FLANAGAN School of Electrical, Electronic and Communications Engineering University College Dublin
 The Law of Averages MARK FLANAGAN School of Electrical, Electronic and Communications Engineering University College Dublin Basic Principle of Inequalities: For any real number x, we have 3 x 2 0, with
The Law of Averages MARK FLANAGAN School of Electrical, Electronic and Communications Engineering University College Dublin Basic Principle of Inequalities: For any real number x, we have 3 x 2 0, with
MATH 251 Examination II July 28, Name: Student Number: Section:
 MATH 251 Examination II July 28, 2008 Name: Student Number: Section: This exam has 9 questions for a total of 100 points. In order to obtain full credit for partial credit problems, all work must be shown.
MATH 251 Examination II July 28, 2008 Name: Student Number: Section: This exam has 9 questions for a total of 100 points. In order to obtain full credit for partial credit problems, all work must be shown.
2. Every linear system with the same number of equations as unknowns has a unique solution.
 1. For matrices A, B, C, A + B = A + C if and only if A = B. 2. Every linear system with the same number of equations as unknowns has a unique solution. 3. Every linear system with the same number of equations
1. For matrices A, B, C, A + B = A + C if and only if A = B. 2. Every linear system with the same number of equations as unknowns has a unique solution. 3. Every linear system with the same number of equations
Linear Systems. Class 27. c 2008 Ron Buckmire. TITLE Projection Matrices and Orthogonal Diagonalization CURRENT READING Poole 5.4
 Linear Systems Math Spring 8 c 8 Ron Buckmire Fowler 9 MWF 9: am - :5 am http://faculty.oxy.edu/ron/math//8/ Class 7 TITLE Projection Matrices and Orthogonal Diagonalization CURRENT READING Poole 5. Summary
Linear Systems Math Spring 8 c 8 Ron Buckmire Fowler 9 MWF 9: am - :5 am http://faculty.oxy.edu/ron/math//8/ Class 7 TITLE Projection Matrices and Orthogonal Diagonalization CURRENT READING Poole 5. Summary
EUCLIDEAN SPACES AND VECTORS
 EUCLIDEAN SPACES AND VECTORS PAUL L. BAILEY 1. Introduction Our ultimate goal is to apply the techniques of calculus to higher dimensions. We begin by discussing what mathematical concepts describe these
EUCLIDEAN SPACES AND VECTORS PAUL L. BAILEY 1. Introduction Our ultimate goal is to apply the techniques of calculus to higher dimensions. We begin by discussing what mathematical concepts describe these
Announcements Monday, November 13
 Announcements Monday, November 13 The third midterm is on this Friday, November 17 The exam covers 31, 32, 51, 52, 53, and 55 About half the problems will be conceptual, and the other half computational
Announcements Monday, November 13 The third midterm is on this Friday, November 17 The exam covers 31, 32, 51, 52, 53, and 55 About half the problems will be conceptual, and the other half computational
Fractals. R. J. Renka 11/14/2016. Department of Computer Science & Engineering University of North Texas. R. J. Renka Fractals
 Fractals R. J. Renka Department of Computer Science & Engineering University of North Texas 11/14/2016 Introduction In graphics, fractals are used to produce natural scenes with irregular shapes, such
Fractals R. J. Renka Department of Computer Science & Engineering University of North Texas 11/14/2016 Introduction In graphics, fractals are used to produce natural scenes with irregular shapes, such
1 What is the solution of the system of equations graphed below? y = 2x + 1
 1 What is the solution of the system of equations graphed below? y = 2x + 1 3 As shown in the diagram below, when hexagon ABCDEF is reflected over line m, the image is hexagon A'B'C'D'E'F'. y = x 2 + 2x
1 What is the solution of the system of equations graphed below? y = 2x + 1 3 As shown in the diagram below, when hexagon ABCDEF is reflected over line m, the image is hexagon A'B'C'D'E'F'. y = x 2 + 2x
9th Bay Area Mathematical Olympiad
 9th Bay rea Mathematical Olympiad February 27, 2007 Problems with Solutions 1 15-inch-long stick has four marks on it, dividing it into five segments of length 1,2,3,4, and 5 inches (although not neccessarily
9th Bay rea Mathematical Olympiad February 27, 2007 Problems with Solutions 1 15-inch-long stick has four marks on it, dividing it into five segments of length 1,2,3,4, and 5 inches (although not neccessarily
MEP Pupil Text 13-19, Additional Material. Gradients of Perpendicular Lines
 Graphs MEP Pupil Text -9, Additional Material.B Gradients of Perpendicular Lines In this section we explore the relationship between the gradients of perpendicular lines and line segments. Worked Example
Graphs MEP Pupil Text -9, Additional Material.B Gradients of Perpendicular Lines In this section we explore the relationship between the gradients of perpendicular lines and line segments. Worked Example