Structure from Motion. Forsyth&Ponce: Chap. 12 and 13 Szeliski: Chap. 7
|
|
|
- Jemimah Booth
- 6 years ago
- Views:
Transcription
1 Structure from Moton Forsyth&once: Chap. 2 and 3 Szelsk: Chap. 7
2 Introducton to Structure from Moton Forsyth&once: Chap. 2 Szelsk: Chap. 7


3 Structure from Moton Intro
4 he Reconstructon roblem p 3?? p p 2
5 he Reconstructon roblem m Images n onts Assume correspondences p m p p 2



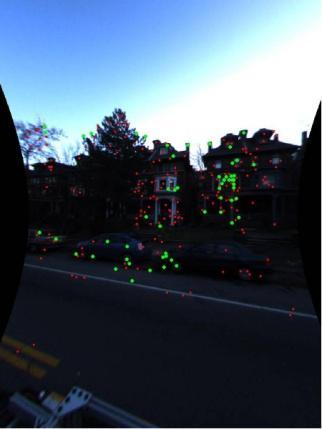


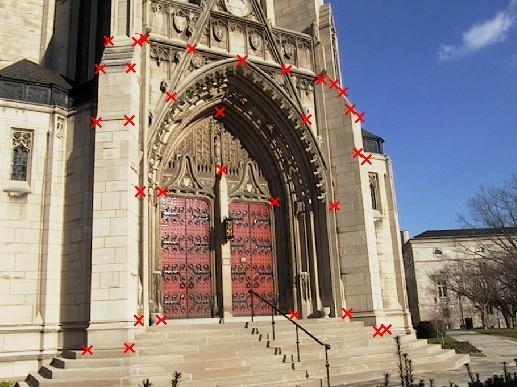
6 Example from Uenn s group
7 Communty photo collectons Example: Query Notre Dame, ars on Flckr
8 he Reconstructon roblem m Images n onts Reconstructon = Assume correspondences Scene ponts, =,..n p m Camera proecton matrces M, =,..,m Such that: p p p 2 M,
9 Scale Ambguty p Z p 2 D
10 Scale Ambguty If we scale the entre scene by some factor k and, at the same tme, we scale the dstance between the cameras by the same scale factor, the proectons of the scene ponts n the mage reman exactly the same! It s mpossble to recover the absolute scale of the scene. p p 2 D = kd Z = kz
11 If ~ ~ M ( (,..,,.., n) m hen, gven a 4x4 matrx Q, the other reconstructon defned as: s also a soluton because: p M ) M s the true reconstructon of all the ponts and all the proecton matrces ~ Q ~ M M Q herefore: he reconstructon s defned only up to a global transformaton. We consder 3 types of transformatons: metrc, affne, proectve., QQ ~ M ~
12 If ~ (,.., n) ~, (,.., m M ) s the true reconstructon of all the ponts and all the proecton matrces In plan Englsh: If we transform ~ the scene and we transform the Q cameras n ~ the opposte way, then Mthe mages M Qdo hen, gven a 4x4 matrx Q, the other reconstructon defned as: s also a soluton because: not change! p M M herefore: he reconstructon s defned only up to a global transformaton. We consder 3 types of transformatons: metrc, affne, proectve., QQ ~ M ~



13 Q = smlarty (scale+rotaton+translaton) Metrc Affne Q = affne (last row s [0 0 0 ]) Q = general proectve (arbtrary 4x4 matrx) roectve
14
15 he Affne Case Forsyth&once: Chap. 2 Szelsk: Chap. 7
16 Orthographc roecton p v u u v I 2 x 3 X Y Z 0 I 2 x 3 0 X Y Z u = X v = Y
17 Orthographc roecton: General p v u u v I 2 x 3 R X Y Z t R 2 x 3 b X Y Z A b X Y Z A X Y Z b
18 Weak erspectve v p u u v s 0 0 s R 2 x 3 b X Y Z A b X Y Z A X Y Z b
19 General Affne v p u u v s 0 a s 2 R 2 x 3 t ' X Y Z A b X Y Z A X Y Z b
20 Affne Eppolar Geometry p p' A A' b b' p p F p ' 0
21 Affne Eppolar Geometry In pthe affne A case, b the fundamental matrx smplfes to a 4-degree of p' A' b' p freedom matrx, whch can be estmated from 4 pont correspondences: F p F p ' 0 he eppolar lnes are always // n the affne case
22 Fundamental SFM theorem: Scene structure (the coordnates of the scene ponts ) and camera geometry (proecton matrces (A,b)) can be recovered from 4 pont correspondences from 2 vews. In general, the reconstructon can be solved f: 2mn 8m 3n 2 he reconstructon s not unque, t s defned up to an arbtrary affne transformaton Q (2 degrees of freedom) A b Q A b Q Q C 0 d
23 m Images n Features Reconstructon from many mages: p = A + b p m p p 2
24 m Images n Features p = A + b Centerng: Substract the centrod p n p from all the mage ponts p,..,p n p m p p 2
25 After centerng, each pont s related to ts proecton by: p = A Stackng all 2m equatons nto a sngle matrx: p p n A D MS D M S n p m p mn A m In partcular, D s of rank 3
26 2m Fundamental Decomposton Measurements = Moton Shape 3 n D = MS n 3
27 n n n n 2m D = U W V n 3 3 o reduce to rank 3, we ust need to set all the sngular values to 0 except for the frst 3 2m D = U 3 3 W 3 V 3 3
28 3 n 2m D = U 3 3 W 3 V M ossble decomposton: U / 2 / 2 W S W V D = M S
29 Gven m mages and n features p Center: For each mage : Compute the centrod: Center the feature coordnates: Accumulate: Construct a 2m by n matrx D such that: Columns: Column contans the proecton of pont n all vews Rows: Row contans one coordnate of the proectons of all the n ponts n mage Factorze: Decompose D: Compute the SVD of D: D = UWV Create U 3 by takng the frst 3 columns of U Create V 3 by takng the frst 3 columns of V Create W 3 by takng the upper left 3x3 block of W Create the moton and shape matrces: M = U and S = W V (or M=U W /2 S=W ½ V )

30
31 he decomposton s not unque. We get the same D by usng any 3x3 C and applyng the n transformatons: 3 M 2m D = U 3 3 W 3 V 3 3 hat s because we have only an affne transformaton and we have not enforced any Eucldean constrants (lke forcng the mage axs to be perpendcular, for example) 3 MC S C S D = M S
32 Orthographc: Image axs are perpendcular and scale s p a 2 a a. a 0 a a
33 hs translates nto a set of 3m lnear equatons n L = CC Orthographc: Image axs are perpendcular and scale s : A LA,. Solve for L 2. Recover C from L by Cholesky decomposton: L = CC 3. Correct M and S: p M MC S C S Id, m a 2 a a. a 0 a a
34 Weak erspectve: Image axs are perpendcular and scales are equal (not necessarly ) p a 2 a a. a a a
35 Weak hs erspectve: translates nto Image a set axs of 2m are lnear perpendcular equatons and n L scales = CCare : equal (not necessarly ) a La 0 a La a La, Solve for L 2. Recover C from L by Cholesky p decomposton: L = CC 3. Correct M and S: M MC S C S a 2, m a a. a a a
36 Summary Affne SFM theorem: Affne reconstructon from two cameras can be recovered ff at least n = 4 ndependent features Affne reconstructon defned up to a global affne transformaton of 3D space (2 parameters) Eppolar geometry: Affne fundamental matrx between 2 cameras defned by 4 ndependent parameters. Eppolar lnes are always parallel Affne camera geometry can be recovered lnearly from the affne fundamental matrx General case: Affne reconstructon from n cameras possble f 2mn >= 8m+3n-2 Factorzaton algorthm: Rank 3 SVD of the matrx of feature coordnates yelds affne reconstructon and moton Metrc reconstructon possble under assumptons: Orthography Weak perspectve araperspectve Metrc reconstructon defned up to a global rotaton
37 General Case: roectve Reconstructon Forsyth&once: Chap. 3 Szelsk: Chap. 7
38 General roecton Model Z Y v p p K R t A X b u p u v X Y Z
39 m Images n Features Assume correspondences p m p p 2 roectve SFM heorem: Reconstructon s possble as long as 2mn >= m +3n 5

40 Metrc Affne roectve
41 p p e C C p M p ' M ' p Fp 0 '
42 p M p ' M ' p Fp 0 ' wo-mage case key result: Reconstructon from 2 mages s possble from at least p7 correspondences he proecton matrx can be computed p from the fundamental matrx F M ' Id 0 F F b e 0 C C A b F
43 Issues We know how to compute the camera geometry from 2 mages * Remanng ssues:. What about m > 2 mages? 2. rangulaton to compute pont n 3D 3. roectve reconstructon s not unque: How can we fnd the metrcally correct reconstructon? 4. How can we fnd the optmal reconstructon? *: (or 3, not shown n class)
44 Issue: Arbtrary number of mages Factorzaton (e.g., assumng affne frst) Sequental methods Herarchcal methods..
45 Sequental Methods M M2 M M m M + Start reconstructon from two (or three) mages by usng the fundamental matrx (or the trfocal tensor). Gven proecton matrx M of mage, fnd the proecton matrx of mage + such that: M = M + for the ponts n common between the two mages M + can be determned from 6 ponts RANSAC f correspondences not known
46 Herarchcal Methods F Q Example from ollefeys Compute F, from groups of 2 or 3 mages Iteratvely sttch the mages nto larger groups Sttchng = Fnd a matrx Q that algns the reconstructon from one group wth the reconstructon from another group Need some features n common between the
47 =coordnates of pont for frst group =coordnates of pont for second group Sttchng Fnd Q that transforms the pont n the second group to the ponts n the frst group M M2 M M + M m mn d (, Q ) Dstance n space Dstance n camera geometry mn d ( M, M Q ) Reproecton error mn d M Q, p d M Q, p




48 3792 ponts 270 ponts 3792 ponts Correspondences 64 mages 9.8m/pt 4.8m/pt roblem: Need enough correspondences n common between vews
49 Issues We know how to compute the camera geometry from 2 mages * Remanng ssues:. What about m > 2 mages? 2. rangulaton to compute pont n 3D 3. roectve reconstructon s not unque: How can we fnd the metrcally correct reconstructon? 4. How can we fnd the optmal reconstructon? *: (or 3, not shown n class)
50 Issue: rangulaton u p C
51 u p C. ont closest to the rays n space (lnear) 2. ont wth lowest algebrac reproecton error (lnear) 3. ont wth lowest geometrc reproecton error (non-lnear) 2 Z Y X W s C Mn 2 M p Mn m m v m m u
52 Issues We know how to compute the camera geometry from 2 mages * Remanng ssues:. What about m > 2 mages? 2. rangulaton to compute pont n 3D 3. roectve reconstructon s not unque: How can we fnd the metrcally correct reconstructon? 4. How can we fnd the optmal reconstructon? *: (or 3, not shown n class)
53 From roectve to Metrc Reconstructon Auto Calbraton Forsyth&once: Chap. 3 Szelsk: Chap. 7
54 M M Q roectve Q Metrc
55 K u s u 0 v v o 0 0 o M =K [Id 0] M m =K m [R m t m ] M =K [R t ]
56 K u s u 0 v v o 0 0 o M m =K[R m t m ] M =K[R t ]
57 M =K[R t ] M m =K[R m t m ] K K K R R K M Q Q M R K Q M t R K Q M Basc trck: Look only at the frst 3 columns Use the fact that R s a rotaton
58 K u s u 0 v v o 0 0 o M m =K[R m t m ] M =K[R t ]
59 u s u o K 0 v v o u s 2 u 2 o s v u o v o u o ω KK 2 v v 2 o v o
60 Assumpton Fxed f= Known k= Constrants Constant K 5 0 / 33 = / 33 3 Image s m= rncpal pont known Aspect rato and skew constant 0 2 3= 23 = Zero Skew = known + Zero skew 0 3 2=0 3= 23 =0 3 mk + (m-)f >= 8
61 U D U L = U 3 D 3 U 3 L 3 = U 3 D 3 ½ D 3 ½ U 3 L 3 = L 3 = Q 3 Q3
62 Gven M Solve for L such that: M LM ~ M LM ( = 2,..m) Dagonalze L: L = UDU Approxmate by rank-3 matrx: L 3 = U 3 D 3 U 3 Compute Q 3 : Q 3 = U 3 D 3 ½ Compute q 4 by settng the orgn of the frst camera to 0: M q 4 = 0 Return Q = [Q 3 q 4 ]
63
64 Issues We know how to compute the camera geometry from 2 mages * Remanng ssues:. What about m > 2 mages? 2. rangulaton to compute pont n 3D 3. roectve reconstructon s not unque: How can we fnd the metrcally correct reconstructon? 4. How can we fnd the optmal reconstructon? *: (or 3, not shown n class)
65 Non-Lnear Refnement: Bundle Adustment
66 M p p M M2 p 2
67 E m u v, m 3 2 m m M,..,M m,.., n
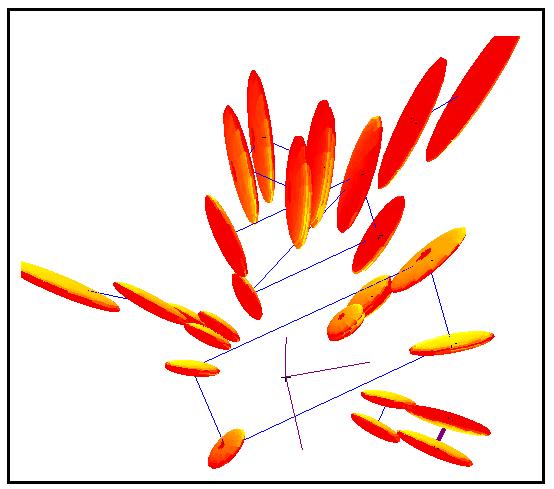
68 E m u v, m 3 2 m m K,..,K m,r,..,r m,t,..,t m rncpal drectons of J J,.., n he drectons of uncertanty are the egenvectors of J J he magntudes of the uncertanty are the nverse egenvalues of J J Formally: he covarance matrx of the error on all the varables s = (J J) -
69 Image 3 Image 2 Image M M 2 M n 2 2n 3 3n



70 General case: Example J = J J = Features: A,B,C,D,E Images:,2,3


71 Example: n=42,453 m=285 N, Ka Steedly, Drew Dellaert, Frank, Out-of-Core Bundle Adustment for Large-Scale 3D Reconstructon,

72 E M,..,M m,.., n
")
73 (From D. Morrs)
74 Example from Uenn s group


75 Communty photo collectons Example: Query Notre Dame, ars on Flckr
 ' ( Mn Fp p + rank-2 SVD reducton")


![Metrc reconstructon: Q t R K M Q ] [](/docs-images/75/71679754/images/76-3.jpg "Self-calbraton (ntrnsc parameter matrx K):")

76 mages + features d d Mn p F p Fp p, ' ', ) ' ( Mn Fp p + rank-2 SVD reducton Eppolar geometry: Fundamental matrx estmaton (mn. 2 mages + 7 correspondences) roectve reconstructon: ] [ b A M 0 b F F b A F Metrc reconstructon: Q t R K M Q ] [ Self-calbraton (ntrnsc parameter matrx K): K K M Q Q M 3 3 ROJECIVE MERIC Lnear eght-pont + RANSAC Non-lnear refnement , 3,,, u v Mn m m m m t R K REFINEMEN Bundle adustment: COMLEE SYSEM
AUTO-CALIBRATION. FACTORIZATION. STRUCTURE FROM MOTION.
 AUO-CALIBRAION. FACORIZAION. SRUCURE FRO OION. hank you for the sldes. hey coe ostly fro the followng sources. arc ollefeys U. of North Carolna artal Hebert CU Slvo Savarese U. of chgan Dan Huttenlocher
AUO-CALIBRAION. FACORIZAION. SRUCURE FRO OION. hank you for the sldes. hey coe ostly fro the followng sources. arc ollefeys U. of North Carolna artal Hebert CU Slvo Savarese U. of chgan Dan Huttenlocher
CS4495/6495 Introduction to Computer Vision. 3C-L3 Calibrating cameras
 CS4495/6495 Introducton to Computer Vson 3C-L3 Calbratng cameras Fnally (last tme): Camera parameters Projecton equaton the cumulatve effect of all parameters: M (3x4) f s x ' 1 0 0 0 c R 0 I T 3 3 3 x1
CS4495/6495 Introducton to Computer Vson 3C-L3 Calbratng cameras Fnally (last tme): Camera parameters Projecton equaton the cumulatve effect of all parameters: M (3x4) f s x ' 1 0 0 0 c R 0 I T 3 3 3 x1
Lectures - Week 4 Matrix norms, Conditioning, Vector Spaces, Linear Independence, Spanning sets and Basis, Null space and Range of a Matrix
 Lectures - Week 4 Matrx norms, Condtonng, Vector Spaces, Lnear Independence, Spannng sets and Bass, Null space and Range of a Matrx Matrx Norms Now we turn to assocatng a number to each matrx. We could
Lectures - Week 4 Matrx norms, Condtonng, Vector Spaces, Lnear Independence, Spannng sets and Bass, Null space and Range of a Matrx Matrx Norms Now we turn to assocatng a number to each matrx. We could
Parameter estimation class 5
 Parameter estmaton class 5 Multple Ve Geometr Comp 9-89 Marc Pollefes Content Background: Projectve geometr (D, 3D), Parameter estmaton, Algortm evaluaton. Sngle Ve: Camera model, Calbraton, Sngle Ve Geometr.
Parameter estmaton class 5 Multple Ve Geometr Comp 9-89 Marc Pollefes Content Background: Projectve geometr (D, 3D), Parameter estmaton, Algortm evaluaton. Sngle Ve: Camera model, Calbraton, Sngle Ve Geometr.
CSci 6974 and ECSE 6966 Math. Tech. for Vision, Graphics and Robotics Lecture 21, April 17, 2006 Estimating A Plane Homography
 CSc 6974 and ECSE 6966 Math. Tech. for Vson, Graphcs and Robotcs Lecture 21, Aprl 17, 2006 Estmatng A Plane Homography Overvew We contnue wth a dscusson of the major ssues, usng estmaton of plane projectve
CSc 6974 and ECSE 6966 Math. Tech. for Vson, Graphcs and Robotcs Lecture 21, Aprl 17, 2006 Estmatng A Plane Homography Overvew We contnue wth a dscusson of the major ssues, usng estmaton of plane projectve
Salmon: Lectures on partial differential equations. Consider the general linear, second-order PDE in the form. ,x 2
 Salmon: Lectures on partal dfferental equatons 5. Classfcaton of second-order equatons There are general methods for classfyng hgher-order partal dfferental equatons. One s very general (applyng even to
Salmon: Lectures on partal dfferental equatons 5. Classfcaton of second-order equatons There are general methods for classfyng hgher-order partal dfferental equatons. One s very general (applyng even to
= = = (a) Use the MATLAB command rref to solve the system. (b) Let A be the coefficient matrix and B be the right-hand side of the system.
 Use the MATLAB command rref to solve the system. (b) Let A be the coefficient matrix and B be the right-hand side of the system.") Chapter Matlab Exercses Chapter Matlab Exercses. Consder the lnear system of Example n Secton.. x x x y z y y z (a) Use the MATLAB command rref to solve the system. (b) Let A be the coeffcent matrx and
Chapter Matlab Exercses Chapter Matlab Exercses. Consder the lnear system of Example n Secton.. x x x y z y y z (a) Use the MATLAB command rref to solve the system. (b) Let A be the coeffcent matrx and
where λ = Z/f. where a 3 4 projection matrix represents a map from 3D to 2D. Part I: Single and Two View Geometry Internal camera parameters
 Imagng Geometry Multple Vew Geometry Perspectve projecton Y Rchard Hartley and Andrew Zsserman X λ y = Y f Z O X p y Z X where λ = Z/f. mage plane CVPR June 1999 Ths can be wrtten as a lnear mappng between
Imagng Geometry Multple Vew Geometry Perspectve projecton Y Rchard Hartley and Andrew Zsserman X λ y = Y f Z O X p y Z X where λ = Z/f. mage plane CVPR June 1999 Ths can be wrtten as a lnear mappng between
Minimizing Algebraic Error in Geometric Estimation Problems
 Mnmzng Algebrac n Geometrc Estmaton Problems Rchard I. Hartley G.E. Corporate Research and Development PO Box 8, Schenectady, NY 39 Emal : hartley@crd.ge.com Abstract Ths paper gves a wdely applcable technque
Mnmzng Algebrac n Geometrc Estmaton Problems Rchard I. Hartley G.E. Corporate Research and Development PO Box 8, Schenectady, NY 39 Emal : hartley@crd.ge.com Abstract Ths paper gves a wdely applcable technque
Inner Product. Euclidean Space. Orthonormal Basis. Orthogonal
 Inner Product Defnton 1 () A Eucldean space s a fnte-dmensonal vector space over the reals R, wth an nner product,. Defnton 2 (Inner Product) An nner product, on a real vector space X s a symmetrc, blnear,
Inner Product Defnton 1 () A Eucldean space s a fnte-dmensonal vector space over the reals R, wth an nner product,. Defnton 2 (Inner Product) An nner product, on a real vector space X s a symmetrc, blnear,
Coordinate-Free Projective Geometry for Computer Vision
 MM Research Preprnts,131 165 No. 18, Dec. 1999. Beng 131 Coordnate-Free Proectve Geometry for Computer Vson Hongbo L, Gerald Sommer 1. Introducton How to represent an mage pont algebracally? Gven a Cartesan
MM Research Preprnts,131 165 No. 18, Dec. 1999. Beng 131 Coordnate-Free Proectve Geometry for Computer Vson Hongbo L, Gerald Sommer 1. Introducton How to represent an mage pont algebracally? Gven a Cartesan
8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS
 SECTION 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS 493 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS All the vector spaces you have studed thus far n the text are real vector spaces because the scalars
SECTION 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS 493 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS All the vector spaces you have studed thus far n the text are real vector spaces because the scalars
1 Derivation of Point-to-Plane Minimization
 1 Dervaton of Pont-to-Plane Mnmzaton Consder the Chen-Medon (pont-to-plane) framework for ICP. Assume we have a collecton of ponts (p, q ) wth normals n. We want to determne the optmal rotaton and translaton
1 Dervaton of Pont-to-Plane Mnmzaton Consder the Chen-Medon (pont-to-plane) framework for ICP. Assume we have a collecton of ponts (p, q ) wth normals n. We want to determne the optmal rotaton and translaton
n α j x j = 0 j=1 has a nontrivial solution. Here A is the n k matrix whose jth column is the vector for all t j=0
 MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
The Second Anti-Mathima on Game Theory
 The Second Ant-Mathma on Game Theory Ath. Kehagas December 1 2006 1 Introducton In ths note we wll examne the noton of game equlbrum for three types of games 1. 2-player 2-acton zero-sum games 2. 2-player
The Second Ant-Mathma on Game Theory Ath. Kehagas December 1 2006 1 Introducton In ths note we wll examne the noton of game equlbrum for three types of games 1. 2-player 2-acton zero-sum games 2. 2-player
w ). Then use the Cauchy-Schwartz inequality ( v w v w ).] = in R 4. Can you find a vector u 4 in R 4 such that the
![w ). Then use the Cauchy-Schwartz inequality ( v w v w ).] = in R 4. Can you find a vector u 4 in R 4 such that the](/thumbs/82/86743320.jpg "w ). Then use the Cauchy-Schwartz inequality ( v w v w ).] = in R 4. Can you find a vector u 4 in R 4 such that the") Math S-b Summer 8 Homework #5 Problems due Wed, July 8: Secton 5: Gve an algebrac proof for the trangle nequalty v+ w v + w Draw a sketch [Hnt: Expand v+ w ( v+ w) ( v+ w ) hen use the Cauchy-Schwartz
Math S-b Summer 8 Homework #5 Problems due Wed, July 8: Secton 5: Gve an algebrac proof for the trangle nequalty v+ w v + w Draw a sketch [Hnt: Expand v+ w ( v+ w) ( v+ w ) hen use the Cauchy-Schwartz
Singular Value Decomposition: Theory and Applications
 Sngular Value Decomposton: Theory and Applcatons Danel Khashab Sprng 2015 Last Update: March 2, 2015 1 Introducton A = UDV where columns of U and V are orthonormal and matrx D s dagonal wth postve real
Sngular Value Decomposton: Theory and Applcatons Danel Khashab Sprng 2015 Last Update: March 2, 2015 1 Introducton A = UDV where columns of U and V are orthonormal and matrx D s dagonal wth postve real
Estimating the Fundamental Matrix by Transforming Image Points in Projective Space 1
 Estmatng the Fundamental Matrx by Transformng Image Ponts n Projectve Space 1 Zhengyou Zhang and Charles Loop Mcrosoft Research, One Mcrosoft Way, Redmond, WA 98052, USA E-mal: fzhang,cloopg@mcrosoft.com
Estmatng the Fundamental Matrx by Transformng Image Ponts n Projectve Space 1 Zhengyou Zhang and Charles Loop Mcrosoft Research, One Mcrosoft Way, Redmond, WA 98052, USA E-mal: fzhang,cloopg@mcrosoft.com
Norms, Condition Numbers, Eigenvalues and Eigenvectors
 Norms, Condton Numbers, Egenvalues and Egenvectors 1 Norms A norm s a measure of the sze of a matrx or a vector For vectors the common norms are: N a 2 = ( x 2 1/2 the Eucldean Norm (1a b 1 = =1 N x (1b
Norms, Condton Numbers, Egenvalues and Egenvectors 1 Norms A norm s a measure of the sze of a matrx or a vector For vectors the common norms are: N a 2 = ( x 2 1/2 the Eucldean Norm (1a b 1 = =1 N x (1b
2.3 Nilpotent endomorphisms
 s a block dagonal matrx, wth A Mat dm U (C) In fact, we can assume that B = B 1 B k, wth B an ordered bass of U, and that A = [f U ] B, where f U : U U s the restrcton of f to U 40 23 Nlpotent endomorphsms
s a block dagonal matrx, wth A Mat dm U (C) In fact, we can assume that B = B 1 B k, wth B an ordered bass of U, and that A = [f U ] B, where f U : U U s the restrcton of f to U 40 23 Nlpotent endomorphsms
Statistical pattern recognition
 Statstcal pattern recognton Bayes theorem Problem: decdng f a patent has a partcular condton based on a partcular test However, the test s mperfect Someone wth the condton may go undetected (false negatve
Statstcal pattern recognton Bayes theorem Problem: decdng f a patent has a partcular condton based on a partcular test However, the test s mperfect Someone wth the condton may go undetected (false negatve
MEM 255 Introduction to Control Systems Review: Basics of Linear Algebra
 MEM 255 Introducton to Control Systems Revew: Bascs of Lnear Algebra Harry G. Kwatny Department of Mechancal Engneerng & Mechancs Drexel Unversty Outlne Vectors Matrces MATLAB Advanced Topcs Vectors A
MEM 255 Introducton to Control Systems Revew: Bascs of Lnear Algebra Harry G. Kwatny Department of Mechancal Engneerng & Mechancs Drexel Unversty Outlne Vectors Matrces MATLAB Advanced Topcs Vectors A
U.C. Berkeley CS294: Beyond Worst-Case Analysis Luca Trevisan September 5, 2017
 U.C. Berkeley CS94: Beyond Worst-Case Analyss Handout 4s Luca Trevsan September 5, 07 Summary of Lecture 4 In whch we ntroduce semdefnte programmng and apply t to Max Cut. Semdefnte Programmng Recall that
U.C. Berkeley CS94: Beyond Worst-Case Analyss Handout 4s Luca Trevsan September 5, 07 Summary of Lecture 4 In whch we ntroduce semdefnte programmng and apply t to Max Cut. Semdefnte Programmng Recall that
APPENDIX A Some Linear Algebra
 APPENDIX A Some Lnear Algebra The collecton of m, n matrces A.1 Matrces a 1,1,..., a 1,n A = a m,1,..., a m,n wth real elements a,j s denoted by R m,n. If n = 1 then A s called a column vector. Smlarly,
APPENDIX A Some Lnear Algebra The collecton of m, n matrces A.1 Matrces a 1,1,..., a 1,n A = a m,1,..., a m,n wth real elements a,j s denoted by R m,n. If n = 1 then A s called a column vector. Smlarly,
Why Bayesian? 3. Bayes and Normal Models. State of nature: class. Decision rule. Rev. Thomas Bayes ( ) Bayes Theorem (yes, the famous one)
 Bayes Theorem (yes, the famous one)") Why Bayesan? 3. Bayes and Normal Models Alex M. Martnez alex@ece.osu.edu Handouts Handoutsfor forece ECE874 874Sp Sp007 If all our research (n PR was to dsappear and you could only save one theory, whch
Why Bayesan? 3. Bayes and Normal Models Alex M. Martnez alex@ece.osu.edu Handouts Handoutsfor forece ECE874 874Sp Sp007 If all our research (n PR was to dsappear and you could only save one theory, whch
17. Coordinate-Free Projective Geometry for Computer Vision
 17. Coordnate-Free Projectve Geometry for Computer Vson Hongbo L and Gerald Sommer Insttute of Computer Scence and Appled Mathematcs, Chrstan-Albrechts-Unversty of Kel 17.1 Introducton How to represent
17. Coordnate-Free Projectve Geometry for Computer Vson Hongbo L and Gerald Sommer Insttute of Computer Scence and Appled Mathematcs, Chrstan-Albrechts-Unversty of Kel 17.1 Introducton How to represent
Quantum Mechanics I - Session 4
 Quantum Mechancs I - Sesson 4 Aprl 3, 05 Contents Operators Change of Bass 4 3 Egenvectors and Egenvalues 5 3. Denton....................................... 5 3. Rotaton n D....................................
Quantum Mechancs I - Sesson 4 Aprl 3, 05 Contents Operators Change of Bass 4 3 Egenvectors and Egenvalues 5 3. Denton....................................... 5 3. Rotaton n D....................................
Week3, Chapter 4. Position and Displacement. Motion in Two Dimensions. Instantaneous Velocity. Average Velocity
 Week3, Chapter 4 Moton n Two Dmensons Lecture Quz A partcle confned to moton along the x axs moves wth constant acceleraton from x =.0 m to x = 8.0 m durng a 1-s tme nterval. The velocty of the partcle
Week3, Chapter 4 Moton n Two Dmensons Lecture Quz A partcle confned to moton along the x axs moves wth constant acceleraton from x =.0 m to x = 8.0 m durng a 1-s tme nterval. The velocty of the partcle
Mathematical Preparations
 1 Introducton Mathematcal Preparatons The theory of relatvty was developed to explan experments whch studed the propagaton of electromagnetc radaton n movng coordnate systems. Wthn expermental error the
1 Introducton Mathematcal Preparatons The theory of relatvty was developed to explan experments whch studed the propagaton of electromagnetc radaton n movng coordnate systems. Wthn expermental error the
Geometric Registration for Deformable Shapes. 2.1 ICP + Tangent Space optimization for Rigid Motions
 Geometrc Regstraton for Deformable Shapes 2.1 ICP + Tangent Space optmzaton for Rgd Motons Regstraton Problem Gven Two pont cloud data sets P (model) and Q (data) sampled from surfaces Φ P and Φ Q respectvely.
Geometrc Regstraton for Deformable Shapes 2.1 ICP + Tangent Space optmzaton for Rgd Motons Regstraton Problem Gven Two pont cloud data sets P (model) and Q (data) sampled from surfaces Φ P and Φ Q respectvely.
Chapter 5. Solution of System of Linear Equations. Module No. 6. Solution of Inconsistent and Ill Conditioned Systems
 Numercal Analyss by Dr. Anta Pal Assstant Professor Department of Mathematcs Natonal Insttute of Technology Durgapur Durgapur-713209 emal: anta.bue@gmal.com 1 . Chapter 5 Soluton of System of Lnear Equatons
Numercal Analyss by Dr. Anta Pal Assstant Professor Department of Mathematcs Natonal Insttute of Technology Durgapur Durgapur-713209 emal: anta.bue@gmal.com 1 . Chapter 5 Soluton of System of Lnear Equatons
ρ some λ THE INVERSE POWER METHOD (or INVERSE ITERATION) , for , or (more usually) to
 , for , or (more usually) to") THE INVERSE POWER METHOD (or INVERSE ITERATION) -- applcaton of the Power method to A some fxed constant ρ (whch s called a shft), x λ ρ If the egenpars of A are { ( λ, x ) } ( ), or (more usually) to,
THE INVERSE POWER METHOD (or INVERSE ITERATION) -- applcaton of the Power method to A some fxed constant ρ (whch s called a shft), x λ ρ If the egenpars of A are { ( λ, x ) } ( ), or (more usually) to,
1 Matrix representations of canonical matrices
 1 Matrx representatons of canoncal matrces 2-d rotaton around the orgn: ( ) cos θ sn θ R 0 = sn θ cos θ 3-d rotaton around the x-axs: R x = 1 0 0 0 cos θ sn θ 0 sn θ cos θ 3-d rotaton around the y-axs:
1 Matrx representatons of canoncal matrces 2-d rotaton around the orgn: ( ) cos θ sn θ R 0 = sn θ cos θ 3-d rotaton around the x-axs: R x = 1 0 0 0 cos θ sn θ 0 sn θ cos θ 3-d rotaton around the y-axs:
Lecture 6/7 (February 10/12, 2014) DIRAC EQUATION. The non-relativistic Schrödinger equation was obtained by noting that the Hamiltonian 2
 DIRAC EQUATION. The non-relativistic Schrödinger equation was obtained by noting that the Hamiltonian 2") P470 Lecture 6/7 (February 10/1, 014) DIRAC EQUATION The non-relatvstc Schrödnger equaton was obtaned by notng that the Hamltonan H = P (1) m can be transformed nto an operator form wth the substtutons
P470 Lecture 6/7 (February 10/1, 014) DIRAC EQUATION The non-relatvstc Schrödnger equaton was obtaned by notng that the Hamltonan H = P (1) m can be transformed nto an operator form wth the substtutons
Body Models I-2. Gerard Pons-Moll and Bernt Schiele Max Planck Institute for Informatics
 Body Models I-2 Gerard Pons-Moll and Bernt Schele Max Planck Insttute for Informatcs December 18, 2017 What s mssng Gven correspondences, we can fnd the optmal rgd algnment wth Procrustes. PROBLEMS: How
Body Models I-2 Gerard Pons-Moll and Bernt Schele Max Planck Insttute for Informatcs December 18, 2017 What s mssng Gven correspondences, we can fnd the optmal rgd algnment wth Procrustes. PROBLEMS: How
Composite Hypotheses testing
 Composte ypotheses testng In many hypothess testng problems there are many possble dstrbutons that can occur under each of the hypotheses. The output of the source s a set of parameters (ponts n a parameter
Composte ypotheses testng In many hypothess testng problems there are many possble dstrbutons that can occur under each of the hypotheses. The output of the source s a set of parameters (ponts n a parameter
Spin-rotation coupling of the angularly accelerated rigid body
 Spn-rotaton couplng of the angularly accelerated rgd body Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 E-mal: louaelzen@gmal.com November 1, 2017 All Rghts Reserved. Abstract Ths paper s
Spn-rotaton couplng of the angularly accelerated rgd body Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 E-mal: louaelzen@gmal.com November 1, 2017 All Rghts Reserved. Abstract Ths paper s
Week 9 Chapter 10 Section 1-5
 Week 9 Chapter 10 Secton 1-5 Rotaton Rgd Object A rgd object s one that s nondeformable The relatve locatons of all partcles makng up the object reman constant All real objects are deformable to some extent,
Week 9 Chapter 10 Secton 1-5 Rotaton Rgd Object A rgd object s one that s nondeformable The relatve locatons of all partcles makng up the object reman constant All real objects are deformable to some extent,
Lecture 3. Camera Models 2 & Camera Calibration. Professor Silvio Savarese Computational Vision and Geometry Lab. 13- Jan- 15.
 Lecture Caera Models Caera Calbraton rofessor Slvo Savarese Coputatonal Vson and Geoetry Lab Slvo Savarese Lecture - - Jan- 5 Lecture Caera Models Caera Calbraton Recap of caera odels Caera calbraton proble
Lecture Caera Models Caera Calbraton rofessor Slvo Savarese Coputatonal Vson and Geoetry Lab Slvo Savarese Lecture - - Jan- 5 Lecture Caera Models Caera Calbraton Recap of caera odels Caera calbraton proble
The Geometry of Logit and Probit
 The Geometry of Logt and Probt Ths short note s meant as a supplement to Chapters and 3 of Spatal Models of Parlamentary Votng and the notaton and reference to fgures n the text below s to those two chapters.
The Geometry of Logt and Probt Ths short note s meant as a supplement to Chapters and 3 of Spatal Models of Parlamentary Votng and the notaton and reference to fgures n the text below s to those two chapters.
STAT 309: MATHEMATICAL COMPUTATIONS I FALL 2018 LECTURE 16
 STAT 39: MATHEMATICAL COMPUTATIONS I FALL 218 LECTURE 16 1 why teratve methods f we have a lnear system Ax = b where A s very, very large but s ether sparse or structured (eg, banded, Toepltz, banded plus
STAT 39: MATHEMATICAL COMPUTATIONS I FALL 218 LECTURE 16 1 why teratve methods f we have a lnear system Ax = b where A s very, very large but s ether sparse or structured (eg, banded, Toepltz, banded plus
Poisson brackets and canonical transformations
 rof O B Wrght Mechancs Notes osson brackets and canoncal transformatons osson Brackets Consder an arbtrary functon f f ( qp t) df f f f q p q p t But q p p where ( qp ) pq q df f f f p q q p t In order
rof O B Wrght Mechancs Notes osson brackets and canoncal transformatons osson Brackets Consder an arbtrary functon f f ( qp t) df f f f q p q p t But q p p where ( qp ) pq q df f f f p q q p t In order
Point cloud to point cloud rigid transformations. Minimizing Rigid Registration Errors
 Pont cloud to pont cloud rgd transformatons Russell Taylor 600.445 1 600.445 Fall 000-015 Mnmzng Rgd Regstraton Errors Typcally, gven a set of ponts {a } n one coordnate system and another set of ponts
Pont cloud to pont cloud rgd transformatons Russell Taylor 600.445 1 600.445 Fall 000-015 Mnmzng Rgd Regstraton Errors Typcally, gven a set of ponts {a } n one coordnate system and another set of ponts
Low correlation tensor decomposition via entropy maximization
 CS369H: Herarches of Integer Programmng Relaxatons Sprng 2016-2017 Low correlaton tensor decomposton va entropy maxmzaton Lecture and notes by Sam Hopkns Scrbes: James Hong Overvew CS369H). These notes
CS369H: Herarches of Integer Programmng Relaxatons Sprng 2016-2017 Low correlaton tensor decomposton va entropy maxmzaton Lecture and notes by Sam Hopkns Scrbes: James Hong Overvew CS369H). These notes
CS 523: Computer Graphics, Spring Shape Modeling. PCA Applications + SVD. Andrew Nealen, Rutgers, /15/2011 1
 CS 523: Computer Graphcs, Sprng 20 Shape Modelng PCA Applcatons + SVD Andrew Nealen, utgers, 20 2/5/20 emnder: PCA Fnd prncpal components of data ponts Orthogonal drectons that are domnant n the data (have
CS 523: Computer Graphcs, Sprng 20 Shape Modelng PCA Applcatons + SVD Andrew Nealen, utgers, 20 2/5/20 emnder: PCA Fnd prncpal components of data ponts Orthogonal drectons that are domnant n the data (have
Moments of Inertia. and reminds us of the analogous equation for linear momentum p= mv, which is of the form. The kinetic energy of the body is.
 Moments of Inerta Suppose a body s movng on a crcular path wth constant speed Let s consder two quanttes: the body s angular momentum L about the center of the crcle, and ts knetc energy T How are these
Moments of Inerta Suppose a body s movng on a crcular path wth constant speed Let s consder two quanttes: the body s angular momentum L about the center of the crcle, and ts knetc energy T How are these
Communication with AWGN Interference
 Communcaton wth AWG Interference m {m } {p(m } Modulator s {s } r=s+n Recever ˆm AWG n m s a dscrete random varable(rv whch takes m wth probablty p(m. Modulator maps each m nto a waveform sgnal s m=m
Communcaton wth AWG Interference m {m } {p(m } Modulator s {s } r=s+n Recever ˆm AWG n m s a dscrete random varable(rv whch takes m wth probablty p(m. Modulator maps each m nto a waveform sgnal s m=m
Some Comments on Accelerating Convergence of Iterative Sequences Using Direct Inversion of the Iterative Subspace (DIIS)
") Some Comments on Acceleratng Convergence of Iteratve Sequences Usng Drect Inverson of the Iteratve Subspace (DIIS) C. Davd Sherrll School of Chemstry and Bochemstry Georga Insttute of Technology May 1998
Some Comments on Acceleratng Convergence of Iteratve Sequences Usng Drect Inverson of the Iteratve Subspace (DIIS) C. Davd Sherrll School of Chemstry and Bochemstry Georga Insttute of Technology May 1998
Lecture 10 Support Vector Machines. Oct
 Lecture 10 Support Vector Machnes Oct - 20-2008 Lnear Separators Whch of the lnear separators s optmal? Concept of Margn Recall that n Perceptron, we learned that the convergence rate of the Perceptron
Lecture 10 Support Vector Machnes Oct - 20-2008 Lnear Separators Whch of the lnear separators s optmal? Concept of Margn Recall that n Perceptron, we learned that the convergence rate of the Perceptron
PHYS 705: Classical Mechanics. Calculus of Variations II
 1 PHYS 705: Classcal Mechancs Calculus of Varatons II 2 Calculus of Varatons: Generalzaton (no constrant yet) Suppose now that F depends on several dependent varables : We need to fnd such that has a statonary
1 PHYS 705: Classcal Mechancs Calculus of Varatons II 2 Calculus of Varatons: Generalzaton (no constrant yet) Suppose now that F depends on several dependent varables : We need to fnd such that has a statonary
Quantum Mechanics for Scientists and Engineers. David Miller
 Quantum Mechancs for Scentsts and Engneers Davd Mller Types of lnear operators Types of lnear operators Blnear expanson of operators Blnear expanson of lnear operators We know that we can expand functons
Quantum Mechancs for Scentsts and Engneers Davd Mller Types of lnear operators Types of lnear operators Blnear expanson of operators Blnear expanson of lnear operators We know that we can expand functons
SL n (F ) Equals its Own Derived Group
 Equals its Own Derived Group") Internatonal Journal of Algebra, Vol. 2, 2008, no. 12, 585-594 SL n (F ) Equals ts Own Derved Group Jorge Macel BMCC-The Cty Unversty of New York, CUNY 199 Chambers street, New York, NY 10007, USA macel@cms.nyu.edu
Internatonal Journal of Algebra, Vol. 2, 2008, no. 12, 585-594 SL n (F ) Equals ts Own Derved Group Jorge Macel BMCC-The Cty Unversty of New York, CUNY 199 Chambers street, New York, NY 10007, USA macel@cms.nyu.edu
Multi-dimensional Central Limit Theorem
 Mult-dmensonal Central Lmt heorem Outlne ( ( ( t as ( + ( + + ( ( ( Consder a sequence of ndependent random proceses t, t, dentcal to some ( t. Assume t = 0. Defne the sum process t t t t = ( t = (; t
Mult-dmensonal Central Lmt heorem Outlne ( ( ( t as ( + ( + + ( ( ( Consder a sequence of ndependent random proceses t, t, dentcal to some ( t. Assume t = 0. Defne the sum process t t t t = ( t = (; t
Unified Subspace Analysis for Face Recognition
 Unfed Subspace Analyss for Face Recognton Xaogang Wang and Xaoou Tang Department of Informaton Engneerng The Chnese Unversty of Hong Kong Shatn, Hong Kong {xgwang, xtang}@e.cuhk.edu.hk Abstract PCA, LDA
Unfed Subspace Analyss for Face Recognton Xaogang Wang and Xaoou Tang Department of Informaton Engneerng The Chnese Unversty of Hong Kong Shatn, Hong Kong {xgwang, xtang}@e.cuhk.edu.hk Abstract PCA, LDA
Yong Joon Ryang. 1. Introduction Consider the multicommodity transportation problem with convex quadratic cost function. 1 2 (x x0 ) T Q(x x 0 )
 T Q(x x 0 )") Kangweon-Kyungk Math. Jour. 4 1996), No. 1, pp. 7 16 AN ITERATIVE ROW-ACTION METHOD FOR MULTICOMMODITY TRANSPORTATION PROBLEMS Yong Joon Ryang Abstract. The optmzaton problems wth quadratc constrants often
Kangweon-Kyungk Math. Jour. 4 1996), No. 1, pp. 7 16 AN ITERATIVE ROW-ACTION METHOD FOR MULTICOMMODITY TRANSPORTATION PROBLEMS Yong Joon Ryang Abstract. The optmzaton problems wth quadratc constrants often
Example: (13320, 22140) =? Solution #1: The divisors of are 1, 2, 3, 4, 5, 6, 9, 10, 12, 15, 18, 20, 27, 30, 36, 41,
 =? Solution #1: The divisors of are 1, 2, 3, 4, 5, 6, 9, 10, 12, 15, 18, 20, 27, 30, 36, 41,") The greatest common dvsor of two ntegers a and b (not both zero) s the largest nteger whch s a common factor of both a and b. We denote ths number by gcd(a, b), or smply (a, b) when there s no confuson
The greatest common dvsor of two ntegers a and b (not both zero) s the largest nteger whch s a common factor of both a and b. We denote ths number by gcd(a, b), or smply (a, b) when there s no confuson
A proof of the dimension conjecture and of Jacobi's bound. François Ollivier (CNRS) LIX UMR CNRS École polytechnique
 LIX UMR CNRS École polytechnique") A proof of the dmenson conjecture and of Jacob's bound Franços Ollver (CNRS) LIX UMR CNRS École polytechnque Jacob s bound Proposton. Let P 1,..., P n , a,j = ord xj P and = max σ S n Σ
A proof of the dmenson conjecture and of Jacob's bound Franços Ollver (CNRS) LIX UMR CNRS École polytechnque Jacob s bound Proposton. Let P 1,..., P n , a,j = ord xj P and = max σ S n Σ
Common loop optimizations. Example to improve locality. Why Dependence Analysis. Data Dependence in Loops. Goal is to find best schedule:
 15-745 Lecture 6 Data Dependence n Loops Copyrght Seth Goldsten, 2008 Based on sldes from Allen&Kennedy Lecture 6 15-745 2005-8 1 Common loop optmzatons Hostng of loop-nvarant computatons pre-compute before
15-745 Lecture 6 Data Dependence n Loops Copyrght Seth Goldsten, 2008 Based on sldes from Allen&Kennedy Lecture 6 15-745 2005-8 1 Common loop optmzatons Hostng of loop-nvarant computatons pre-compute before
15.1 The geometric basis for the trifocal tensor Incidence relations for lines.
 15 The Trfocal Tensor The trfocal tensor plays an analogous role n three vews to that played by the fundamental matrx n two. It encapsulates all the (projectve) geometrc relatons between three vews that
15 The Trfocal Tensor The trfocal tensor plays an analogous role n three vews to that played by the fundamental matrx n two. It encapsulates all the (projectve) geometrc relatons between three vews that
NEWTON S LAWS. These laws only apply when viewed from an inertial coordinate system (unaccelerated system).
.") EWTO S LAWS Consder two partcles. 1 1. If 1 0 then 0 wth p 1 m1v. 1 1 2. 1.. 3. 11 These laws only apply when vewed from an nertal coordnate system (unaccelerated system). consder a collecton of partcles
EWTO S LAWS Consder two partcles. 1 1. If 1 0 then 0 wth p 1 m1v. 1 1 2. 1.. 3. 11 These laws only apply when vewed from an nertal coordnate system (unaccelerated system). consder a collecton of partcles
Tensor Analysis. For orthogonal curvilinear coordinates, ˆ ˆ (98) Expanding the derivative, we have, ˆ. h q. . h q h q
 Expanding the derivative, we have, ˆ. h q. . h q h q") For orthogonal curvlnear coordnates, eˆ grad a a= ( aˆ ˆ e). h q (98) Expandng the dervatve, we have, eˆ aˆ ˆ e a= ˆ ˆ a h e + q q 1 aˆ ˆ ˆ a e = ee ˆˆ ˆ + e. h q h q Now expandng eˆ / q (some of the detals
For orthogonal curvlnear coordnates, eˆ grad a a= ( aˆ ˆ e). h q (98) Expandng the dervatve, we have, eˆ aˆ ˆ e a= ˆ ˆ a h e + q q 1 aˆ ˆ ˆ a e = ee ˆˆ ˆ + e. h q h q Now expandng eˆ / q (some of the detals
Matrix Approximation via Sampling, Subspace Embedding. 1 Solving Linear Systems Using SVD
 Matrx Approxmaton va Samplng, Subspace Embeddng Lecturer: Anup Rao Scrbe: Rashth Sharma, Peng Zhang 0/01/016 1 Solvng Lnear Systems Usng SVD Two applcatons of SVD have been covered so far. Today we loo
Matrx Approxmaton va Samplng, Subspace Embeddng Lecturer: Anup Rao Scrbe: Rashth Sharma, Peng Zhang 0/01/016 1 Solvng Lnear Systems Usng SVD Two applcatons of SVD have been covered so far. Today we loo
Mechanics Physics 151
 Mechancs Physcs 151 Lecture 3 Lagrange s Equatons (Goldsten Chapter 1) Hamlton s Prncple (Chapter 2) What We Dd Last Tme! Dscussed mult-partcle systems! Internal and external forces! Laws of acton and
Mechancs Physcs 151 Lecture 3 Lagrange s Equatons (Goldsten Chapter 1) Hamlton s Prncple (Chapter 2) What We Dd Last Tme! Dscussed mult-partcle systems! Internal and external forces! Laws of acton and
Inexact Newton Methods for Inverse Eigenvalue Problems
 Inexact Newton Methods for Inverse Egenvalue Problems Zheng-jan Ba Abstract In ths paper, we survey some of the latest development n usng nexact Newton-lke methods for solvng nverse egenvalue problems.
Inexact Newton Methods for Inverse Egenvalue Problems Zheng-jan Ba Abstract In ths paper, we survey some of the latest development n usng nexact Newton-lke methods for solvng nverse egenvalue problems.
8.1 Arc Length. What is the length of a curve? How can we approximate it? We could do it following the pattern we ve used before
 .1 Arc Length hat s the length of a curve? How can we approxmate t? e could do t followng the pattern we ve used before Use a sequence of ncreasngly short segments to approxmate the curve: As the segments
.1 Arc Length hat s the length of a curve? How can we approxmate t? e could do t followng the pattern we ve used before Use a sequence of ncreasngly short segments to approxmate the curve: As the segments
The Trifocal Tensor The geometric basis for the trifocal tensor
 14 The Trfocal Tensor The trfocal tensor plays an analogous role n three vews to that played by the fundamental matrx n two. It encapsulates all the (projectve) geometrc relatons between three vews that
14 The Trfocal Tensor The trfocal tensor plays an analogous role n three vews to that played by the fundamental matrx n two. It encapsulates all the (projectve) geometrc relatons between three vews that
Computer Vision. The 2D projective plane and it s applications. HZ Ch 2. In particular: Ch 2.1-4, 2.7, Szelisky: Ch 2.1.1, 2.1.2
 Computer Vson e D projectve plane and t s applcatons HZ C. In partcular: C.-4,.7, Szelsk: C..,.. Estmaton:HZ: C 4.-4..5, 4.4.4-4.8 cursorl Rcard Hartle and Andrew Zsserman, Multple Vew Geometr, Cambrdge
Computer Vson e D projectve plane and t s applcatons HZ C. In partcular: C.-4,.7, Szelsk: C..,.. Estmaton:HZ: C 4.-4..5, 4.4.4-4.8 cursorl Rcard Hartle and Andrew Zsserman, Multple Vew Geometr, Cambrdge
Report on Image warping
 Report on Image warpng Xuan Ne, Dec. 20, 2004 Ths document summarzed the algorthms of our mage warpng soluton for further study, and there s a detaled descrpton about the mplementaton of these algorthms.
Report on Image warpng Xuan Ne, Dec. 20, 2004 Ths document summarzed the algorthms of our mage warpng soluton for further study, and there s a detaled descrpton about the mplementaton of these algorthms.
However, since P is a symmetric idempotent matrix, of P are either 0 or 1 [Eigen-values
 Fall 007 Soluton to Mdterm Examnaton STAT 7 Dr. Goel. [0 ponts] For the general lnear model = X + ε, wth uncorrelated errors havng mean zero and varance σ, suppose that the desgn matrx X s not necessarly
Fall 007 Soluton to Mdterm Examnaton STAT 7 Dr. Goel. [0 ponts] For the general lnear model = X + ε, wth uncorrelated errors havng mean zero and varance σ, suppose that the desgn matrx X s not necessarly
Lagrangian Field Theory
 Lagrangan Feld Theory Adam Lott PHY 391 Aprl 6, 017 1 Introducton Ths paper s a summary of Chapter of Mandl and Shaw s Quantum Feld Theory [1]. The frst thng to do s to fx the notaton. For the most part,
Lagrangan Feld Theory Adam Lott PHY 391 Aprl 6, 017 1 Introducton Ths paper s a summary of Chapter of Mandl and Shaw s Quantum Feld Theory [1]. The frst thng to do s to fx the notaton. For the most part,
COMPLEX NUMBERS AND QUADRATIC EQUATIONS
 COMPLEX NUMBERS AND QUADRATIC EQUATIONS INTRODUCTION We know that x 0 for all x R e the square of a real number (whether postve, negatve or ero) s non-negatve Hence the equatons x, x, x + 7 0 etc are not
COMPLEX NUMBERS AND QUADRATIC EQUATIONS INTRODUCTION We know that x 0 for all x R e the square of a real number (whether postve, negatve or ero) s non-negatve Hence the equatons x, x, x + 7 0 etc are not
Efficient, General Point Cloud Registration with Kernel Feature Maps
 Effcent, General Pont Cloud Regstraton wth Kernel Feature Maps Hanchen Xong, Sandor Szedmak, Justus Pater Insttute of Computer Scence Unversty of Innsbruck 30 May 2013 Hanchen Xong (Un.Innsbruck) 3D Regstraton
Effcent, General Pont Cloud Regstraton wth Kernel Feature Maps Hanchen Xong, Sandor Szedmak, Justus Pater Insttute of Computer Scence Unversty of Innsbruck 30 May 2013 Hanchen Xong (Un.Innsbruck) 3D Regstraton
Rigid body simulation
 Rgd bod smulaton Rgd bod smulaton Once we consder an object wth spacal etent, partcle sstem smulaton s no longer suffcent Problems Problems Unconstraned sstem rotatonal moton torques and angular momentum
Rgd bod smulaton Rgd bod smulaton Once we consder an object wth spacal etent, partcle sstem smulaton s no longer suffcent Problems Problems Unconstraned sstem rotatonal moton torques and angular momentum
Programming Project 1: Molecular Geometry and Rotational Constants
 Programmng Project 1: Molecular Geometry and Rotatonal Constants Center for Computatonal Chemstry Unversty of Georga Athens, Georga 30602 Summer 2012 1 Introducton Ths programmng project s desgned to provde
Programmng Project 1: Molecular Geometry and Rotatonal Constants Center for Computatonal Chemstry Unversty of Georga Athens, Georga 30602 Summer 2012 1 Introducton Ths programmng project s desgned to provde
Generalized Linear Methods
 Generalzed Lnear Methods 1 Introducton In the Ensemble Methods the general dea s that usng a combnaton of several weak learner one could make a better learner. More formally, assume that we have a set
Generalzed Lnear Methods 1 Introducton In the Ensemble Methods the general dea s that usng a combnaton of several weak learner one could make a better learner. More formally, assume that we have a set
2. Differentiable Manifolds and Tensors
 . Dfferentable Manfolds and Tensors.1. Defnton of a Manfold.. The Sphere as a Manfold.3. Other Examples of Manfolds.4. Global Consderatons.5. Curves.6. Functons on M.7. Vectors and Vector Felds.8. Bass
. Dfferentable Manfolds and Tensors.1. Defnton of a Manfold.. The Sphere as a Manfold.3. Other Examples of Manfolds.4. Global Consderatons.5. Curves.6. Functons on M.7. Vectors and Vector Felds.8. Bass
Tracking with Kalman Filter
 Trackng wth Kalman Flter Scott T. Acton Vrgna Image and Vdeo Analyss (VIVA), Charles L. Brown Department of Electrcal and Computer Engneerng Department of Bomedcal Engneerng Unversty of Vrgna, Charlottesvlle,
Trackng wth Kalman Flter Scott T. Acton Vrgna Image and Vdeo Analyss (VIVA), Charles L. Brown Department of Electrcal and Computer Engneerng Department of Bomedcal Engneerng Unversty of Vrgna, Charlottesvlle,
Time-Varying Systems and Computations Lecture 6
 Tme-Varyng Systems and Computatons Lecture 6 Klaus Depold 14. Januar 2014 The Kalman Flter The Kalman estmaton flter attempts to estmate the actual state of an unknown dscrete dynamcal system, gven nosy
Tme-Varyng Systems and Computatons Lecture 6 Klaus Depold 14. Januar 2014 The Kalman Flter The Kalman estmaton flter attempts to estmate the actual state of an unknown dscrete dynamcal system, gven nosy
Error Bars in both X and Y
 Error Bars n both X and Y Wrong ways to ft a lne : 1. y(x) a x +b (σ x 0). x(y) c y + d (σ y 0) 3. splt dfference between 1 and. Example: Prmordal He abundance: Extrapolate ft lne to [ O / H ] 0. [ He
Error Bars n both X and Y Wrong ways to ft a lne : 1. y(x) a x +b (σ x 0). x(y) c y + d (σ y 0) 3. splt dfference between 1 and. Example: Prmordal He abundance: Extrapolate ft lne to [ O / H ] 0. [ He
Linear, affine, and convex sets and hulls In the sequel, unless otherwise specified, X will denote a real vector space.
 Lnear, affne, and convex sets and hulls In the sequel, unless otherwse specfed, X wll denote a real vector space. Lnes and segments. Gven two ponts x, y X, we defne xy = {x + t(y x) : t R} = {(1 t)x +
Lnear, affne, and convex sets and hulls In the sequel, unless otherwse specfed, X wll denote a real vector space. Lnes and segments. Gven two ponts x, y X, we defne xy = {x + t(y x) : t R} = {(1 t)x +
A particle in a state of uniform motion remain in that state of motion unless acted upon by external force.
 The fundamental prncples of classcal mechancs were lad down by Galleo and Newton n the 16th and 17th centures. In 1686, Newton wrote the Prncpa where he gave us three laws of moton, one law of gravty,
The fundamental prncples of classcal mechancs were lad down by Galleo and Newton n the 16th and 17th centures. In 1686, Newton wrote the Prncpa where he gave us three laws of moton, one law of gravty,
Formulas for the Determinant
 page 224 224 CHAPTER 3 Determnants e t te t e 2t 38 A = e t 2te t e 2t e t te t 2e 2t 39 If 123 A = 345, 456 compute the matrx product A adj(a) What can you conclude about det(a)? For Problems 40 43, use
page 224 224 CHAPTER 3 Determnants e t te t e 2t 38 A = e t 2te t e 2t e t te t 2e 2t 39 If 123 A = 345, 456 compute the matrx product A adj(a) What can you conclude about det(a)? For Problems 40 43, use
Module 3 LOSSY IMAGE COMPRESSION SYSTEMS. Version 2 ECE IIT, Kharagpur
 Module 3 LOSSY IMAGE COMPRESSION SYSTEMS Verson ECE IIT, Kharagpur Lesson 6 Theory of Quantzaton Verson ECE IIT, Kharagpur Instructonal Objectves At the end of ths lesson, the students should be able to:
Module 3 LOSSY IMAGE COMPRESSION SYSTEMS Verson ECE IIT, Kharagpur Lesson 6 Theory of Quantzaton Verson ECE IIT, Kharagpur Instructonal Objectves At the end of ths lesson, the students should be able to:
An Algorithm to Solve the Inverse Kinematics Problem of a Robotic Manipulator Based on Rotation Vectors
 An Algorthm to Solve the Inverse Knematcs Problem of a Robotc Manpulator Based on Rotaton Vectors Mohamad Z. Al-az*, Mazn Z. Othman**, and Baker B. Al-Bahr* *AL-Nahran Unversty, Computer Eng. Dep., Baghdad,
An Algorthm to Solve the Inverse Knematcs Problem of a Robotc Manpulator Based on Rotaton Vectors Mohamad Z. Al-az*, Mazn Z. Othman**, and Baker B. Al-Bahr* *AL-Nahran Unversty, Computer Eng. Dep., Baghdad,
Number of cases Number of factors Number of covariates Number of levels of factor i. Value of the dependent variable for case k
 ANOVA Model and Matrx Computatons Notaton The followng notaton s used throughout ths chapter unless otherwse stated: N F CN Y Z j w W Number of cases Number of factors Number of covarates Number of levels
ANOVA Model and Matrx Computatons Notaton The followng notaton s used throughout ths chapter unless otherwse stated: N F CN Y Z j w W Number of cases Number of factors Number of covarates Number of levels
Mean Field / Variational Approximations
 Mean Feld / Varatonal Appromatons resented by Jose Nuñez 0/24/05 Outlne Introducton Mean Feld Appromaton Structured Mean Feld Weghted Mean Feld Varatonal Methods Introducton roblem: We have dstrbuton but
Mean Feld / Varatonal Appromatons resented by Jose Nuñez 0/24/05 Outlne Introducton Mean Feld Appromaton Structured Mean Feld Weghted Mean Feld Varatonal Methods Introducton roblem: We have dstrbuton but
CS 468 Lecture 16: Isometry Invariance and Spectral Techniques
 CS 468 Lecture 16: Isometry Invarance and Spectral Technques Justn Solomon Scrbe: Evan Gawlk Introducton. In geometry processng, t s often desrable to characterze the shape of an object n a manner that
CS 468 Lecture 16: Isometry Invarance and Spectral Technques Justn Solomon Scrbe: Evan Gawlk Introducton. In geometry processng, t s often desrable to characterze the shape of an object n a manner that
Lecture 12: Discrete Laplacian
 Lecture 12: Dscrete Laplacan Scrbe: Tanye Lu Our goal s to come up wth a dscrete verson of Laplacan operator for trangulated surfaces, so that we can use t n practce to solve related problems We are mostly
Lecture 12: Dscrete Laplacan Scrbe: Tanye Lu Our goal s to come up wth a dscrete verson of Laplacan operator for trangulated surfaces, so that we can use t n practce to solve related problems We are mostly
VQ widely used in coding speech, image, and video
 at Scalar quantzers are specal cases of vector quantzers (VQ): they are constraned to look at one sample at a tme (memoryless) VQ does not have such constrant better RD perfomance expected Source codng
at Scalar quantzers are specal cases of vector quantzers (VQ): they are constraned to look at one sample at a tme (memoryless) VQ does not have such constrant better RD perfomance expected Source codng
Feb 14: Spatial analysis of data fields
 Feb 4: Spatal analyss of data felds Mappng rregularly sampled data onto a regular grd Many analyss technques for geophyscal data requre the data be located at regular ntervals n space and/or tme. hs s
Feb 4: Spatal analyss of data felds Mappng rregularly sampled data onto a regular grd Many analyss technques for geophyscal data requre the data be located at regular ntervals n space and/or tme. hs s
Which Separator? Spring 1
 Whch Separator? 6.034 - Sprng 1 Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng 3 Margn of a pont " # y (w $ + b) proportonal
Whch Separator? 6.034 - Sprng 1 Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng Whch Separator? Mamze the margn to closest ponts 6.034 - Sprng 3 Margn of a pont " # y (w $ + b) proportonal
MIMA Group. Chapter 2 Bayesian Decision Theory. School of Computer Science and Technology, Shandong University. Xin-Shun SDU
 Group M D L M Chapter Bayesan Decson heory Xn-Shun Xu @ SDU School of Computer Scence and echnology, Shandong Unversty Bayesan Decson heory Bayesan decson theory s a statstcal approach to data mnng/pattern
Group M D L M Chapter Bayesan Decson heory Xn-Shun Xu @ SDU School of Computer Scence and echnology, Shandong Unversty Bayesan Decson heory Bayesan decson theory s a statstcal approach to data mnng/pattern
5 The Rational Canonical Form
 5 The Ratonal Canoncal Form Here p s a monc rreducble factor of the mnmum polynomal m T and s not necessarly of degree one Let F p denote the feld constructed earler n the course, consstng of all matrces
5 The Ratonal Canoncal Form Here p s a monc rreducble factor of the mnmum polynomal m T and s not necessarly of degree one Let F p denote the feld constructed earler n the course, consstng of all matrces
MAE140 - Linear Circuits - Fall 13 Midterm, October 31
 Instructons ME140 - Lnear Crcuts - Fall 13 Mdterm, October 31 () Ths exam s open book. You may use whatever wrtten materals you choose, ncludng your class notes and textbook. You may use a hand calculator
Instructons ME140 - Lnear Crcuts - Fall 13 Mdterm, October 31 () Ths exam s open book. You may use whatever wrtten materals you choose, ncludng your class notes and textbook. You may use a hand calculator
Linear Approximation with Regularization and Moving Least Squares
 Lnear Approxmaton wth Regularzaton and Movng Least Squares Igor Grešovn May 007 Revson 4.6 (Revson : March 004). 5 4 3 0.5 3 3.5 4 Contents: Lnear Fttng...4. Weghted Least Squares n Functon Approxmaton...
Lnear Approxmaton wth Regularzaton and Movng Least Squares Igor Grešovn May 007 Revson 4.6 (Revson : March 004). 5 4 3 0.5 3 3.5 4 Contents: Lnear Fttng...4. Weghted Least Squares n Functon Approxmaton...
p 1 c 2 + p 2 c 2 + p 3 c p m c 2
 Where to put a faclty? Gven locatons p 1,..., p m n R n of m houses, want to choose a locaton c n R n for the fre staton. Want c to be as close as possble to all the house. We know how to measure dstance
Where to put a faclty? Gven locatons p 1,..., p m n R n of m houses, want to choose a locaton c n R n for the fre staton. Want c to be as close as possble to all the house. We know how to measure dstance
ˆ (0.10 m) E ( N m /C ) 36 ˆj ( j C m)
 E ( N m /C ) 36 ˆj ( j C m)") 7.. = = 3 = 4 = 5. The electrc feld s constant everywhere between the plates. Ths s ndcated by the electrc feld vectors, whch are all the same length and n the same drecton. 7.5. Model: The dstances to
7.. = = 3 = 4 = 5. The electrc feld s constant everywhere between the plates. Ths s ndcated by the electrc feld vectors, whch are all the same length and n the same drecton. 7.5. Model: The dstances to
9 Characteristic classes
 THEODORE VORONOV DIFFERENTIAL GEOMETRY. Sprng 2009 [under constructon] 9 Characterstc classes 9.1 The frst Chern class of a lne bundle Consder a complex vector bundle E B of rank p. We shall construct
THEODORE VORONOV DIFFERENTIAL GEOMETRY. Sprng 2009 [under constructon] 9 Characterstc classes 9.1 The frst Chern class of a lne bundle Consder a complex vector bundle E B of rank p. We shall construct
Practical Newton s Method
 Practcal Newton s Method Lecture- n Newton s Method n Pure Newton s method converges radly once t s close to. It may not converge rom the remote startng ont he search drecton to be a descent drecton rue
Practcal Newton s Method Lecture- n Newton s Method n Pure Newton s method converges radly once t s close to. It may not converge rom the remote startng ont he search drecton to be a descent drecton rue
MATH 241B FUNCTIONAL ANALYSIS - NOTES EXAMPLES OF C ALGEBRAS
 MATH 241B FUNCTIONAL ANALYSIS - NOTES EXAMPLES OF C ALGEBRAS These are nformal notes whch cover some of the materal whch s not n the course book. The man purpose s to gve a number of nontrval examples
MATH 241B FUNCTIONAL ANALYSIS - NOTES EXAMPLES OF C ALGEBRAS These are nformal notes whch cover some of the materal whch s not n the course book. The man purpose s to gve a number of nontrval examples