Using the Kalman Filter for SLAM AIMS 2015
|
|
|
- Arline Stone
- 6 years ago
- Views:
Transcription

1 Using the Kalman Filter for SLAM AIMS 2015
2 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation Convergence Properties Pose Based SLAM Sparse Inverse Pose Based Formulation
3 Vehicle Models - Prediction Instantaneous Center of Rotation φ φ a V θ control Truth model (x,y) L Global Reference Frame
4 Noise is in control.
5 Effect of control noise on uncertainty:

6 Using Dead-Reckoned Data
7 Navigation Architecture Dead Reckoned output (drifts badly) Physics (to be estimated) required (corrected) navigation estimates Hidden Control Physics Other Measurements Encoder Counts DR Model Nav Supplied Onboard System integration Navigation (to be installed by us)
8 Background T-Composition 2 3 X 2,3 1 X 1,2 X 1,3 Compounding transformations
9 Just functions!
10 Deduce an Incremental Move These can be in massive error x o (k) u(k) x o (k-1) Global Frame But the common error is subtracted out here
11 Use this move as a control Substitution into Prediction equation (using J1 and J2 as Jacobians): Diagonal covariance matrix (3x3) of error in u o
12 Feature Based Mapping and Navigation Look at the code!!


13 Problem Space
14 Landmarks / Features Things that standout to a sensor: Corners, windows, walls, bright patches, texture Map Point Feature called i We shall initially proceed by considering only point features We ll discuss other feature types later
15 Three Inference Problem Input is measurements conditioned on map and vehicle Data: We want to use Bayes rule to invert this and get maps and vehicles given measurements. Problem 1 inferring location given a map (easy) Problem 2 inferring a map given a location (easy) Problem 3 SLAM learning a map and locating simultaneously We can use a KF for all the above
16 Simple Motion Model Plant Model Remember: u is control, J s are a fancy way of writing jacobians (composition operator). U is strength of noise in plant model.
17 Observation Model r
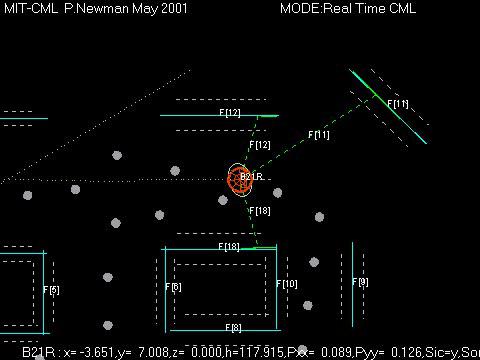
18 Example No features seen here Example Code Provided
19 Location Covariance
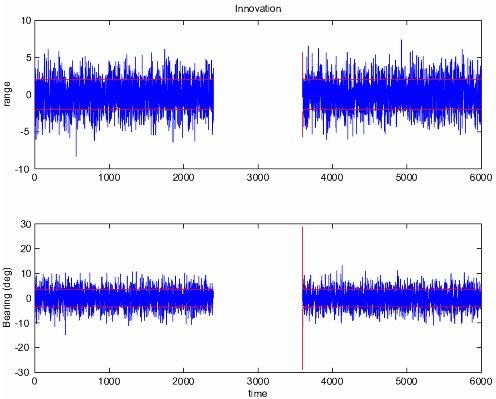
20 Location Innovation
21 Problem II - Mapping Key Point: State Vector GROWS! New, bigger map Old map Obs of new feature State augmentation The state vector is the map
22 How is P augmented? Simple! Use the transformation of covariance rule.. G is the feature initialisation function
23 Leading to : Angle from Veh to feature Vehicle orientation
24 So what are models h and f? h is a function of the feature being observed: f is simply the identity transformation :
25 Turn the handle on the EKF: All hail the Oracle! How do we know what feature we are observing?
26 Problem III SLAM Build a map and use it at the same time This a cornerstone of autonomy
27 Basic S.S.C SLAM A union of Localisation and Mapping Vehicle parameterisation e.g x,y,theta Feature parameterisations e.g x,y for points State vector has vehicle AND map Why naïve? Computation!
28 Prediction: Vehicle Moves Map remains unchanged We have all the terms needed for prediction step
29 Feature Initialisation: These two lines are g() This is y(.) This a step only runs if a new feature is seen
30 Observation Model r We have all the terms needed for update step
31
32 ASYNCHRONOUS DATA AQUISITION Data Collection SYNCHRONOUS PROCESSING START State Projection new data available Perceptual Grouping Any applicable technique can be applied here, for example Hough transform, RANSAC, least medians, maximum likely-hood new and existing unexplained data is combined with a history of vehicle states to search for a stable initialisation of a new feature raw sensor data grouped obsevations Data Storage Individual Observations positive associations Map Update DATA ASSOCIATION unexplained observations Feature Manufacture no new data stable initialisation ambiguity Batch Update Delayed State Management all newly explained observations are used during initialisation Feature Management new feature Addition and removal of past vehicle states Features can be fused with each other (equivalence assertion). Stagnant features can be removed (garbage collection). Compound features can be built. EXIT

 which represents geometry and")
33 Feature Types In theory we can use any geometric parameterisation In practice you need to be very careful about a choice of parameterisation. If ρ is large small errors in θ do crazy things! Feature Frame World Much smarter to use SPMap (Tardos) which represents geometry and uncertainty in frames centred on a feature. Also see Kai Arras s PhD as an excellent SPMap resource
34 The SPMap Closed Loop of Transformations This is the observation model for every feature type!
35 Symmetry Selection Measurement to Feature Transformation measurement robot World
36 Calculating EKF Jacobians Common term X fe : how does Observation appear in feature frame?


37 SLAM in action SPMap Formulation

38 Human Driven Exploration

39 Navigating
40 Autonomous Homing



41 Using the Map Homing Homing Final Adjustment Get Insurance.
 Prof. J. Leonard and Prof. S.")
42 Atlas Extending the EKF Using Multiple Frame Mapping MIT s Infinite Corridor 2.2 km driven path In collaboration with M. Bosse (PhD Thesis) Prof. J. Leonard and Prof. S. Teller (MIT)
43 The Convergence and Stability of SLAM By analysing the behaviour of the LG-KF we can learn about the governing properties of the SLAM problem which are actually completely intuitive.
44 We can show that: The determinant of any submatrix of the map covariance matrix decreases monotonically as observations are successively made. In the limit as the number of observations increases, the landmark estimates become fully correlated. In the limit, the covariance associated with any single landmark location estimate is determined only by the initial covariance in the vehicle location estimate.
45
46
47 Proofs Condensed (9)
48 To be Tattooed on Inside of Eyelids The entire structure of the SLAM problem critically depends on maintaining complete knowledge of the cross correlation between landmark estimates. Minimizing or ignoring cross correlations is precisely contrary to the structure of the problem. As the vehicle progresses through the environment the errors in the estimates of any pair of landmarks become more and more correlated, and indeed never become less correlated. In the limit, the errors in the estimates of any pair of landmarks becomes fully correlated. This means that given the exact location of any one landmark, the location of any other landmark in the map can also be determined with absolute certainty. As the vehicle moves through the environment taking observations of individual landmarks, the error in the estimates of the relative location between different landmarks reduces monotonically to the point where the map of relative locations is known with absolute precision. As the map converges in the above manner, the error in the absolute location of every landmark (and thus the whole map) reaches a lower bound determined only by the error that existed when the first observation was made. (We didn t prove this here. However it is an excellent test for consistency in new SLAM algorithms) This is all under the assumption that we observe all features equally often for other cases see Kim Sun-Joon PhD MIT 2004

49 Pose Based SLAM Control Past poses Scan matching between past poses produces observation with which to update state-vector Growth with time State vector contains only past vehicle poses. Each pose has a scan rigidly attached to it
50 Pose Based Prediction Step Past poses Note f() changes the size of the state vector! Plant model (f) and Jacobian are all we need to plug into EKF prediction equations
51 Pose Based Update Step x v [j] z i,j x v [i] Observation model (h) and Jacobian are all we need to plug into EKF update equations RUN LIVE DEMO HERE

52 Demonstration 3D Pose Based SLAM
53 Issues with Single Frame SLAM It is uni-modal. It cannot cope with ambiguous situations It is inconsistent - the linearisations lead to errors which underestimate the covariance of the underlying pdf It is fragile - if the estimated is in error the linearisation is very poor disaster. But the biggest problem is (was) scaling Much progress has been made on scaling see upcoming talks. In particular FastSLAM Montemerlo et. al Atlas(Bosse et al) Postponement (Davison, Nebot) CTS (Leonard Newman) Exactly Sparse Delayed State Filter (Eustice et. Al (see third practical) )
54 And Finally: turn it all on its Head the information form Information Matrix is inverse of covariance (makes sense!) We can propagate information matrix an information vector instead of state and covariance
55 Look Again at Augmentation Matrix inversion lemma Note the zeros in the information matrix that don t appear in the EKF version..
56 So What? The information matrix remains band-diagonal when augmenting! -> constant time. (compare with EKF which is linear with state size) nz = 920 Why? Because of the markov property of the plant model we only need the previous state to predict a new pose. There is much that can be said about the structure of the information matrix and the underlying pd.f but time is short.
57 And there s more + = It appears then that the update is constant time..
58 But There s No Free Lunch More details in Eustice et al s ICRA 2005 paper Relates strongly to contemporary graphical-slam methods (see upcoming talks) RUN LIVE DEMO HERE
59 What remains under the carpet? Data Association (what am I looking at) Loop Closing (was I really that lost?) Consistency and Robustness Scaling Relationship to large scale optimisation These are meaty topics and will be the focus of other summer school lectures. Many thanks for your time
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
UAV Navigation: Airborne Inertial SLAM
 Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters
 SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo") Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
L06. LINEAR KALMAN FILTERS. NA568 Mobile Robotics: Methods & Algorithms
 L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robot Localisation. Henrik I. Christensen. January 12, 2007
 Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
On the Treatment of Relative-Pose Measurements for Mobile Robot Localization
 On the Treatment of Relative-Pose Measurements for Mobile Robot Localization Anastasios I. Mourikis and Stergios I. Roumeliotis Dept. of Computer Science & Engineering, University of Minnesota, Minneapolis,
On the Treatment of Relative-Pose Measurements for Mobile Robot Localization Anastasios I. Mourikis and Stergios I. Roumeliotis Dept. of Computer Science & Engineering, University of Minnesota, Minneapolis,
(W: 12:05-1:50, 50-N201)
") 2015 School of Information Technology and Electrical Engineering at the University of Queensland Schedule Week Date Lecture (W: 12:05-1:50, 50-N201) 1 29-Jul Introduction Representing Position & Orientation
2015 School of Information Technology and Electrical Engineering at the University of Queensland Schedule Week Date Lecture (W: 12:05-1:50, 50-N201) 1 29-Jul Introduction Representing Position & Orientation
Distributed Data Fusion with Kalman Filters. Simon Julier Computer Science Department University College London
 Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
COS Lecture 16 Autonomous Robot Navigation
 COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Simultaneous Localization and Map Building Using Natural features in Outdoor Environments
 Simultaneous Localization and Map Building Using Natural features in Outdoor Environments Jose Guivant, Eduardo Nebot, Hugh Durrant Whyte Australian Centre for Field Robotics Department of Mechanical and
Simultaneous Localization and Map Building Using Natural features in Outdoor Environments Jose Guivant, Eduardo Nebot, Hugh Durrant Whyte Australian Centre for Field Robotics Department of Mechanical and
Exact State and Covariance Sub-matrix Recovery for Submap Based Sparse EIF SLAM Algorithm
 8 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-3, 8 Exact State and Covariance Sub-matrix Recovery for Submap Based Sparse EIF SLAM Algorithm Shoudong Huang, Zhan
8 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-3, 8 Exact State and Covariance Sub-matrix Recovery for Submap Based Sparse EIF SLAM Algorithm Shoudong Huang, Zhan
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
Sensors Fusion for Mobile Robotics localization. M. De Cecco - Robotics Perception and Action
 Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
CS 532: 3D Computer Vision 6 th Set of Notes
 1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
E190Q Lecture 11 Autonomous Robot Navigation
 E190Q Lecture 11 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 013 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
E190Q Lecture 11 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 013 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
TSRT14: Sensor Fusion Lecture 9
 TSRT14: Sensor Fusion Lecture 9 Simultaneous localization and mapping (SLAM) Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 9 Gustaf Hendeby Spring 2018 1 / 28 Le 9: simultaneous localization and
TSRT14: Sensor Fusion Lecture 9 Simultaneous localization and mapping (SLAM) Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 9 Gustaf Hendeby Spring 2018 1 / 28 Le 9: simultaneous localization and
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
Robotics 2 Target Tracking. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robotics. Lecture 4: Probabilistic Robotics. See course website for up to date information.
 Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors
 Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors GRASP Laboratory University of Pennsylvania June 6, 06 Outline Motivation Motivation 3 Problem
Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors GRASP Laboratory University of Pennsylvania June 6, 06 Outline Motivation Motivation 3 Problem
Hidden Markov Models (recap BNs)
") Probabilistic reasoning over time - Hidden Markov Models (recap BNs) Applied artificial intelligence (EDA132) Lecture 10 2016-02-17 Elin A. Topp Material based on course book, chapter 15 1 A robot s view
Probabilistic reasoning over time - Hidden Markov Models (recap BNs) Applied artificial intelligence (EDA132) Lecture 10 2016-02-17 Elin A. Topp Material based on course book, chapter 15 1 A robot s view
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
Vlad Estivill-Castro. Robots for People --- A project for intelligent integrated systems
 1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
Markov localization uses an explicit, discrete representation for the probability of all position in the state space.
 Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Multi-Sensor Fusion for Localization of a Mobile Robot in Outdoor Environments
 Multi-Sensor Fusion for Localization of a Mobile Robot in Outdoor Environments Thomas Emter, Arda Saltoğlu and Janko Petereit Introduction AMROS Mobile platform equipped with multiple sensors for navigation
Multi-Sensor Fusion for Localization of a Mobile Robot in Outdoor Environments Thomas Emter, Arda Saltoğlu and Janko Petereit Introduction AMROS Mobile platform equipped with multiple sensors for navigation
Introduction to Mobile Robotics Information Gain-Based Exploration. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras
 Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
CSE 483: Mobile Robotics. Extended Kalman filter for localization(worked out example)
") DRAFT a final version will be posted shortly CSE 483: Mobile Robotics Lecture by: Prof. K. Madhava Krishna Lecture # 4 Scribe: Dhaivat Bhatt, Isha Dua Date: 14th November, 216 (Monday) Extended Kalman
DRAFT a final version will be posted shortly CSE 483: Mobile Robotics Lecture by: Prof. K. Madhava Krishna Lecture # 4 Scribe: Dhaivat Bhatt, Isha Dua Date: 14th November, 216 (Monday) Extended Kalman
ESTIMATOR STABILITY ANALYSIS IN SLAM. Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu
 ESTIMATOR STABILITY ANALYSIS IN SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu Institut de Robtica i Informtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona, 88 Spain {tvidal, cetto,
ESTIMATOR STABILITY ANALYSIS IN SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu Institut de Robtica i Informtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona, 88 Spain {tvidal, cetto,
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robotic mapping Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robotic mapping Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Lecture 9. Time series prediction
 Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
L03. PROBABILITY REVIEW II COVARIANCE PROJECTION. NA568 Mobile Robotics: Methods & Algorithms
 L03. PROBABILITY REVIEW II COVARIANCE PROJECTION NA568 Mobile Robotics: Methods & Algorithms Today s Agenda State Representation and Uncertainty Multivariate Gaussian Covariance Projection Probabilistic
L03. PROBABILITY REVIEW II COVARIANCE PROJECTION NA568 Mobile Robotics: Methods & Algorithms Today s Agenda State Representation and Uncertainty Multivariate Gaussian Covariance Projection Probabilistic
The Kalman Filter (part 1) Definition. Rudolf Emil Kalman. Why do we need a filter? Definition. HCI/ComS 575X: Computational Perception.
 Definition. Rudolf Emil Kalman. Why do we need a filter? Definition. HCI/ComS 575X: Computational Perception.") The Kalman Filter (part 1) HCI/ComS 575X: Computational Perception Instructor: Alexander Stoytchev http://www.cs.iastate.edu/~alex/classes/2007_spring_575x/ March 5, 2007 HCI/ComS 575X: Computational Perception
The Kalman Filter (part 1) HCI/ComS 575X: Computational Perception Instructor: Alexander Stoytchev http://www.cs.iastate.edu/~alex/classes/2007_spring_575x/ March 5, 2007 HCI/ComS 575X: Computational Perception
Kalman Filter. Predict: Update: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q
 Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
Probabilistic Fundamentals in Robotics
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Amortized Constant Time State Estimation in SLAM using a Mixed Kalman-Information Filter
 1 Amortized Constant Time State Estimation in SLAM using a Mixed Kalman-Information Filter Viorela Ila Josep M. Porta Juan Andrade-Cetto Institut de Robòtica i Informàtica Industrial, CSIC-UPC, Barcelona,
1 Amortized Constant Time State Estimation in SLAM using a Mixed Kalman-Information Filter Viorela Ila Josep M. Porta Juan Andrade-Cetto Institut de Robòtica i Informàtica Industrial, CSIC-UPC, Barcelona,
Fast Incremental Square Root Information Smoothing
 Fast Incremental Square Root Information Smoothing Michael Kaess, Ananth Ranganathan, and Frank Dellaert Center for Robotics and Intelligent Machines, College of Computing Georgia Institute of Technology,
Fast Incremental Square Root Information Smoothing Michael Kaess, Ananth Ranganathan, and Frank Dellaert Center for Robotics and Intelligent Machines, College of Computing Georgia Institute of Technology,
Why do we care? Measurements. Handling uncertainty over time: predicting, estimating, recognizing, learning. Dealing with time
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Scalable Sparsification for Efficient Decision Making Under Uncertainty in High Dimensional State Spaces
 Scalable Sparsification for Efficient Decision Making Under Uncertainty in High Dimensional State Spaces IROS 2017 KHEN ELIMELECH ROBOTICS AND AUTONOMOUS SYSTEMS PROGRAM VADIM INDELMAN DEPARTMENT OF AEROSPACE
Scalable Sparsification for Efficient Decision Making Under Uncertainty in High Dimensional State Spaces IROS 2017 KHEN ELIMELECH ROBOTICS AND AUTONOMOUS SYSTEMS PROGRAM VADIM INDELMAN DEPARTMENT OF AEROSPACE
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Uncertainty representation Localization Chapter 5 (textbook) What is the course about?
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Uncertainty representation Localization Chapter 5 (textbook) What is the course about?
SC-KF Mobile Robot Localization: A Stochastic-Cloning Kalman Filter for Processing Relative-State Measurements
 1 SC-KF Mobile Robot Localization: A Stochastic-Cloning Kalman Filter for Processing Relative-State Measurements Anastasios I. Mourikis, Stergios I. Roumeliotis, and Joel W. Burdick Abstract This paper
1 SC-KF Mobile Robot Localization: A Stochastic-Cloning Kalman Filter for Processing Relative-State Measurements Anastasios I. Mourikis, Stergios I. Roumeliotis, and Joel W. Burdick Abstract This paper
Using covariance intersection for SLAM
 Robotics and Autonomous Systems 55 (2007) 3 20 www.elsevier.com/locate/robot Using covariance intersection for SLAM Simon J. Julier a,, Jeffrey K. Uhlmann b a Department of Computer Science, University
Robotics and Autonomous Systems 55 (2007) 3 20 www.elsevier.com/locate/robot Using covariance intersection for SLAM Simon J. Julier a,, Jeffrey K. Uhlmann b a Department of Computer Science, University
Isobath following using an altimeter as a unique exteroceptive sensor
 Isobath following using an altimeter as a unique exteroceptive sensor Luc Jaulin Lab-STICC, ENSTA Bretagne, Brest, France lucjaulin@gmail.com Abstract. We consider an underwater robot equipped with an
Isobath following using an altimeter as a unique exteroceptive sensor Luc Jaulin Lab-STICC, ENSTA Bretagne, Brest, France lucjaulin@gmail.com Abstract. We consider an underwater robot equipped with an
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Markov Models. CS 188: Artificial Intelligence Fall Example. Mini-Forward Algorithm. Stationary Distributions.
 CS 88: Artificial Intelligence Fall 27 Lecture 2: HMMs /6/27 Markov Models A Markov model is a chain-structured BN Each node is identically distributed (stationarity) Value of X at a given time is called
CS 88: Artificial Intelligence Fall 27 Lecture 2: HMMs /6/27 Markov Models A Markov model is a chain-structured BN Each node is identically distributed (stationarity) Value of X at a given time is called
Simultaneous Localisation and Mapping in Dynamic Environments (SLAMIDE) with Reversible Data Association
 with Reversible Data Association") Robotics: Science and Systems 7 Atlanta, GA, USA, June 27-, 7 Simultaneous Localisation and Mapping in Dynamic Environments (SLAMIDE) with Reversible Data Association Charles Bibby Department of Engineering
Robotics: Science and Systems 7 Atlanta, GA, USA, June 27-, 7 Simultaneous Localisation and Mapping in Dynamic Environments (SLAMIDE) with Reversible Data Association Charles Bibby Department of Engineering
Lego NXT: Navigation and localization using infrared distance sensors and Extended Kalman Filter. Miguel Pinto, A. Paulo Moreira, Aníbal Matos
 Lego NXT: Navigation and localization using infrared distance sensors and Extended Kalman Filter Miguel Pinto, A. Paulo Moreira, Aníbal Matos 1 Resume LegoFeup Localization Real and simulated scenarios
Lego NXT: Navigation and localization using infrared distance sensors and Extended Kalman Filter Miguel Pinto, A. Paulo Moreira, Aníbal Matos 1 Resume LegoFeup Localization Real and simulated scenarios
SC-KF Mobile Robot Localization: A Stochastic Cloning-Kalman Filter for Processing Relative-State Measurements
 SC-KF Mobile Robot Localization: A Stochastic Cloning-Kalman Filter for Processing Relative-State Measurements Anastasios I. Mourikis, Stergios I. Roumeliotis, and Joel W. Burdick Abstract This paper presents
SC-KF Mobile Robot Localization: A Stochastic Cloning-Kalman Filter for Processing Relative-State Measurements Anastasios I. Mourikis, Stergios I. Roumeliotis, and Joel W. Burdick Abstract This paper presents
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions
 CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
Introduction to Mobile Robotics Probabilistic Robotics
 Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
A Study of Covariances within Basic and Extended Kalman Filters
 A Study of Covariances within Basic and Extended Kalman Filters David Wheeler Kyle Ingersoll December 2, 2013 Abstract This paper explores the role of covariance in the context of Kalman filters. The underlying
A Study of Covariances within Basic and Extended Kalman Filters David Wheeler Kyle Ingersoll December 2, 2013 Abstract This paper explores the role of covariance in the context of Kalman filters. The underlying
Gaussian Processes for Sequential Prediction
 Gaussian Processes for Sequential Prediction Michael A. Osborne Machine Learning Research Group Department of Engineering Science University of Oxford Gaussian processes are useful for sequential data,
Gaussian Processes for Sequential Prediction Michael A. Osborne Machine Learning Research Group Department of Engineering Science University of Oxford Gaussian processes are useful for sequential data,
A First-Estimates Jacobian EKF for Improving SLAM Consistency
 A First-Estimates Jacobian EKF for Improving SLAM Consistency Guoquan P. Huang 1, Anastasios I. Mourikis 1,2, and Stergios I. Roumeliotis 1 1 Dept. of Computer Science and Engineering, University of Minnesota,
A First-Estimates Jacobian EKF for Improving SLAM Consistency Guoquan P. Huang 1, Anastasios I. Mourikis 1,2, and Stergios I. Roumeliotis 1 1 Dept. of Computer Science and Engineering, University of Minnesota,
Simultaneous Localization and Mapping
 Simultaneous Localization and Mapping Miroslav Kulich Intelligent and Mobile Robotics Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague Winter semester
Simultaneous Localization and Mapping Miroslav Kulich Intelligent and Mobile Robotics Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague Winter semester
Localization. Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman
 Localization Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman Localization General robotic task Where am I? Techniques generalize to many estimation tasks System parameter
Localization Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman Localization General robotic task Where am I? Techniques generalize to many estimation tasks System parameter
the robot in its current estimated position and orientation (also include a point at the reference point of the robot)
") CSCI 4190 Introduction to Robotic Algorithms, Spring 006 Assignment : out February 13, due February 3 and March Localization and the extended Kalman filter In this assignment, you will write a program
CSCI 4190 Introduction to Robotic Algorithms, Spring 006 Assignment : out February 13, due February 3 and March Localization and the extended Kalman filter In this assignment, you will write a program
15-780: LinearProgramming
 15-780: LinearProgramming J. Zico Kolter February 1-3, 2016 1 Outline Introduction Some linear algebra review Linear programming Simplex algorithm Duality and dual simplex 2 Outline Introduction Some linear
15-780: LinearProgramming J. Zico Kolter February 1-3, 2016 1 Outline Introduction Some linear algebra review Linear programming Simplex algorithm Duality and dual simplex 2 Outline Introduction Some linear
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science Algorithms For Inference Fall 2014
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.438 Algorithms For Inference Fall 2014 Recitation 3 1 Gaussian Graphical Models: Schur s Complement Consider
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.438 Algorithms For Inference Fall 2014 Recitation 3 1 Gaussian Graphical Models: Schur s Complement Consider
Control of Mobile Robots
 Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
CDS 270-2: Lecture 6-1 Towards a Packet-based Control Theory
 Goals: CDS 270-2: Lecture 6-1 Towards a Packet-based Control Theory Ling Shi May 1 2006 - Describe main issues with a packet-based control system - Introduce common models for a packet-based control system
Goals: CDS 270-2: Lecture 6-1 Towards a Packet-based Control Theory Ling Shi May 1 2006 - Describe main issues with a packet-based control system - Introduce common models for a packet-based control system
CS 188: Artificial Intelligence Spring Announcements
 CS 188: Artificial Intelligence Spring 2011 Lecture 18: HMMs and Particle Filtering 4/4/2011 Pieter Abbeel --- UC Berkeley Many slides over this course adapted from Dan Klein, Stuart Russell, Andrew Moore
CS 188: Artificial Intelligence Spring 2011 Lecture 18: HMMs and Particle Filtering 4/4/2011 Pieter Abbeel --- UC Berkeley Many slides over this course adapted from Dan Klein, Stuart Russell, Andrew Moore
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Statistical Techniques in Robotics (16-831, F12) Lecture#17 (Wednesday October 31) Kalman Filters. Lecturer: Drew Bagnell Scribe:Greydon Foil 1
 Lecture#17 (Wednesday October 31) Kalman Filters. Lecturer: Drew Bagnell Scribe:Greydon Foil 1") Statistical Techniques in Robotics (16-831, F12) Lecture#17 (Wednesday October 31) Kalman Filters Lecturer: Drew Bagnell Scribe:Greydon Foil 1 1 Gauss Markov Model Consider X 1, X 2,...X t, X t+1 to be
Statistical Techniques in Robotics (16-831, F12) Lecture#17 (Wednesday October 31) Kalman Filters Lecturer: Drew Bagnell Scribe:Greydon Foil 1 1 Gauss Markov Model Consider X 1, X 2,...X t, X t+1 to be
Stochastic Models in Robotics
 Georgia Tech, IRIM Seminar April 20, 2017 Stochastic Models in Robotics Gregory S. Chirikjian Department of Mechanical Engineering Johns Hopkins University, USA Outline of this talk From Snake-Robot Motion
Georgia Tech, IRIM Seminar April 20, 2017 Stochastic Models in Robotics Gregory S. Chirikjian Department of Mechanical Engineering Johns Hopkins University, USA Outline of this talk From Snake-Robot Motion
COM336: Neural Computing
 COM336: Neural Computing http://www.dcs.shef.ac.uk/ sjr/com336/ Lecture 2: Density Estimation Steve Renals Department of Computer Science University of Sheffield Sheffield S1 4DP UK email: s.renals@dcs.shef.ac.uk
COM336: Neural Computing http://www.dcs.shef.ac.uk/ sjr/com336/ Lecture 2: Density Estimation Steve Renals Department of Computer Science University of Sheffield Sheffield S1 4DP UK email: s.renals@dcs.shef.ac.uk
Analysis and Improvement of the Consistency of Extended Kalman Filter based SLAM
 Analysis and Improvement of the Consistency of Extended Kalman Filter based SLAM Guoquan Huang, Anastasios I Mourikis and Stergios I Roumeliotis Multiple Autonomous Robotic Systems Labroratory Technical
Analysis and Improvement of the Consistency of Extended Kalman Filter based SLAM Guoquan Huang, Anastasios I Mourikis and Stergios I Roumeliotis Multiple Autonomous Robotic Systems Labroratory Technical
Application of Data Fusion to Aerial Robotics. Paul Riseborough March 24, 2015
 Application of Data Fusion to Aerial Robotics Paul Riseborough March 24, 2015 Outline Introduction to APM project What is data fusion and why do we use it? Where is data fusion used in APM? Development
Application of Data Fusion to Aerial Robotics Paul Riseborough March 24, 2015 Outline Introduction to APM project What is data fusion and why do we use it? Where is data fusion used in APM? Development
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
9 Multi-Model State Estimation
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Sensor Fusion: Particle Filter
 Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Großer Beleg. Real-Time Structure from Motion Using Kalman Filtering
 Großer Beleg Real-Time Structure from Motion Using Kalman Filtering By Jeannette Bohg Born on 15th March 1981 in Cottbus Submitted on 21st March 2005 Overseeing Professor: Steffen Hölldobler Supervisor:
Großer Beleg Real-Time Structure from Motion Using Kalman Filtering By Jeannette Bohg Born on 15th March 1981 in Cottbus Submitted on 21st March 2005 Overseeing Professor: Steffen Hölldobler Supervisor:
A Provably Consistent Method for Imposing Sparsity in Feature-based SLAM Information Filters
 A Provably Consistent Method for Imposing Sparsity in Feature-based SLAM Information Filters Matthew Walter, Ryan Eustice, John Leonard Computer Science and Artificial Intelligence Laboratory Department
A Provably Consistent Method for Imposing Sparsity in Feature-based SLAM Information Filters Matthew Walter, Ryan Eustice, John Leonard Computer Science and Artificial Intelligence Laboratory Department
Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements
 Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
CSC487/2503: Foundations of Computer Vision. Visual Tracking. David Fleet
 CSC487/2503: Foundations of Computer Vision Visual Tracking David Fleet Introduction What is tracking? Major players: Dynamics (model of temporal variation of target parameters) Measurements (relation
CSC487/2503: Foundations of Computer Vision Visual Tracking David Fleet Introduction What is tracking? Major players: Dynamics (model of temporal variation of target parameters) Measurements (relation
Simultaneous Mapping and Localization With Sparse Extended Information Filters: Theory and Initial Results
 Simultaneous Mapping and Localization With Sparse Extended Information Filters: Theory and Initial Results Sebastian Thrun, Daphne Koller, Zoubin Ghahramani, Hugh Durrant-Whyte, and Andrew Y. Ng Oct 20,
Simultaneous Mapping and Localization With Sparse Extended Information Filters: Theory and Initial Results Sebastian Thrun, Daphne Koller, Zoubin Ghahramani, Hugh Durrant-Whyte, and Andrew Y. Ng Oct 20,
Probabilistic Robotics
 Probabilistic Robotics Overview of probability, Representing uncertainty Propagation of uncertainty, Bayes Rule Application to Localization and Mapping Slides from Autonomous Robots (Siegwart and Nourbaksh),
Probabilistic Robotics Overview of probability, Representing uncertainty Propagation of uncertainty, Bayes Rule Application to Localization and Mapping Slides from Autonomous Robots (Siegwart and Nourbaksh),
Decision Theory: Markov Decision Processes
 Decision Theory: Markov Decision Processes CPSC 322 Lecture 33 March 31, 2006 Textbook 12.5 Decision Theory: Markov Decision Processes CPSC 322 Lecture 33, Slide 1 Lecture Overview Recap Rewards and Policies
Decision Theory: Markov Decision Processes CPSC 322 Lecture 33 March 31, 2006 Textbook 12.5 Decision Theory: Markov Decision Processes CPSC 322 Lecture 33, Slide 1 Lecture Overview Recap Rewards and Policies
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2016
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Announcements. CS 188: Artificial Intelligence Fall Markov Models. Example: Markov Chain. Mini-Forward Algorithm. Example
 CS 88: Artificial Intelligence Fall 29 Lecture 9: Hidden Markov Models /3/29 Announcements Written 3 is up! Due on /2 (i.e. under two weeks) Project 4 up very soon! Due on /9 (i.e. a little over two weeks)
CS 88: Artificial Intelligence Fall 29 Lecture 9: Hidden Markov Models /3/29 Announcements Written 3 is up! Due on /2 (i.e. under two weeks) Project 4 up very soon! Due on /9 (i.e. a little over two weeks)
Vision for Mobile Robot Navigation: A Survey
 Vision for Mobile Robot Navigation: A Survey (February 2002) Guilherme N. DeSouza & Avinash C. Kak presentation by: Job Zondag 27 February 2009 Outline: Types of Navigation Absolute localization (Structured)
Vision for Mobile Robot Navigation: A Survey (February 2002) Guilherme N. DeSouza & Avinash C. Kak presentation by: Job Zondag 27 February 2009 Outline: Types of Navigation Absolute localization (Structured)
1 Introduction. Systems 2: Simulating Errors. Mobile Robot Systems. System Under. Environment
 Systems 2: Simulating Errors Introduction Simulating errors is a great way to test you calibration algorithms, your real-time identification algorithms, and your estimation algorithms. Conceptually, the
Systems 2: Simulating Errors Introduction Simulating errors is a great way to test you calibration algorithms, your real-time identification algorithms, and your estimation algorithms. Conceptually, the
Why do we care? Examples. Bayes Rule. What room am I in? Handling uncertainty over time: predicting, estimating, recognizing, learning
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
CS 188: Artificial Intelligence Spring 2009
 CS 188: Artificial Intelligence Spring 2009 Lecture 21: Hidden Markov Models 4/7/2009 John DeNero UC Berkeley Slides adapted from Dan Klein Announcements Written 3 deadline extended! Posted last Friday
CS 188: Artificial Intelligence Spring 2009 Lecture 21: Hidden Markov Models 4/7/2009 John DeNero UC Berkeley Slides adapted from Dan Klein Announcements Written 3 deadline extended! Posted last Friday
Intro to Probability. Andrei Barbu
 Intro to Probability Andrei Barbu Some problems Some problems A means to capture uncertainty Some problems A means to capture uncertainty You have data from two sources, are they different? Some problems
Intro to Probability Andrei Barbu Some problems Some problems A means to capture uncertainty Some problems A means to capture uncertainty You have data from two sources, are they different? Some problems