UAV Navigation: Airborne Inertial SLAM
|
|
|
- Juniper Ross
- 5 years ago
- Views:
Transcription


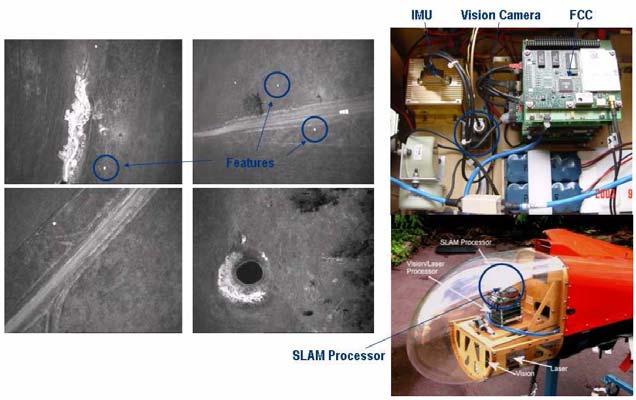
1 Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in Autonomous Systems The University of Sydney, Australia In this presentation we are interested in large and fast outdoor vehicles working in unstructured environments which typically require state information at high update rates. For such systems we need to go beyond thinking of SLAM as just a form of information about a vehicle and a map, but to also see SLAM as the feedback mechanism to the Guidance, Navigation and Control (GNC) system. 1 Jonghyuk KIM 2 Jonghyuk KIM Introduction Introduction We are focusing on systems that: Require complete 6DoF state information for control and navigation purposes; Requires this information at high update rates (>50Hz) for low level control (even greater for measuring higher order vehicle dynamics); Require the localisation system to have a level of information redundancy, that is not solely relying on a single sensor, but instead fusing information easily from various sources. A significant important property of aided inertial navigation system is that they are independent of the platform kinematics since they only measure its dynamics, that is, a true black-box localisation system. In this presentation we will focus on how SLAM is used to constrain the drift of an INS, thus also providing localisation autonomy as well as platform independency. Given the use of we also open up the vast body of literature on this topic which has been generated over the past 50 years, and ask further questions on computational efficiency, observability and optimal trajectories. 3 Jonghyuk KIM 4 Jonghyuk KIM



2 Introduction Introduction If one looks at how localisation systems for such vehicles have been formulated in the past, the core sensing device has been an Inertial Measurement Unit (IMU). These units measure acceleration and rotation rates of a platform at high update rates, which can then be transformed and processed to provide the position, velocity and attitude of a platform, resulting in an System (INS). The data presented by the INS is fed to the GNC system to achieve autonomy. However, the solutions from the INS, just like any other form of dead-reckoning system, drifts with time and hence requires other absolute sensory information to be fused with the INS solution in order to constrain this drift, resulting in Aided Inertial Navigation. Examples include GPS and terrain maps. A significant important property of aided inertial navigation system is that they are independent of the platform kinematics since they only measure its dynamics, that is, a true black-box localisation system. In this presentation we will focus on how SLAM is used to constrain the drift of an INS, thus also providing localisation autonomy as well as platform independency. Given the use of we also open up the vast body of literature on this topic which has been generated over the past 50 years, and ask further questions on computational efficiency, observability and optimal trajectories. 5 Jonghyuk KIM 6 Jonghyuk KIM Presentation Outline Inertial Sensors and Inertial Measurement Units Inertial Sensors and Inertial Measurement Units Aided Structure Example Systems come in various shapes and size, ranging from accuracies of 0.001km/wk to 10km/hr depending on the application types. In such systems, the sensing devices are three accelerometers and three gyros mounted orthogonally to each others. The gyros measure the rotation rate of the platform from which the navigation system can determine what the attitude of the platform is with respect to some navigational reference frame. The accelerometers measure the body acceleration of the platform which can then be transformed to the navigation frame by using attitude information. This acceleration can then be twice integrated to provide the velocity and position of the platform within navigation frame. 7 Jonghyuk KIM 8 Jonghyuk KIM


3 INS Functional Block Diagram Frame Mechanisation 9 Jonghyuk KIM 10 Jonghyuk KIM Aided Structures Aided Structures The aiding of inertial navigation can take on two structures, direct or indirect. The direct structure fuses the inertial navigation solutions generally the position and velocity data with position and/or velocity information from the external source. An Extended Kalman Filter is what is used to fuse the data. The indirect implementation perturbs the inertial equations to formulate inertial error equations. These result in linearised model and hence a standard linear Kalman Filter can be used. Three significant benefits arise when using the indirect implementation. The equations have slower dynamics then when compared to the raw inertial state solution since we are now dealing with errors, thus requiring prediction less often. The Kalman filter implementation also allows for a significant reduction in computational resources. Given the linear nature of the system, we can now ask questions about the observability structure of SLAM, and more readily implement SLAM in autonomous decision making for Guidance and Navigation. We will begin our formulation of using the EKF as this is what is commonly used in SLAM research. We will then look at the indirect implementation. 11 Jonghyuk KIM 12 Jonghyuk KIM
4 Presentation Outlines Vehicle and Map State Vectors Inertial Sensors and Inertial Measurement Units Aided Structure Example Augmented State and Covariance Matrix 13 Jonghyuk KIM 14 Jonghyuk KIM Navigation Frame Mechanisation Vehicle Model: The Observations Feature Location: Observation: Map Model: 15 Jonghyuk KIM 16 Jonghyuk KIM
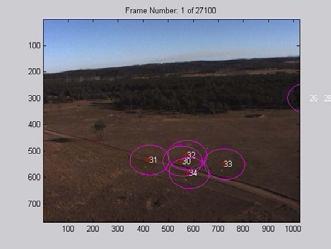
5 New Feature Augmentation Innovation Gate State Augmentation Covariance Augmentation 17 Jonghyuk KIM 18 Jonghyuk KIM Presentation Outlines Example Inertial Sensors and Inertial Measurement Units Aided Structure Example Start at unknown location with no a priori map information. Predict motion through INS. Make relative observations to local features and build a map through these observations. Predict and re-observe features which are in the map and begin to correlate. Correlation assists in constraining drift in INS. Update the vehicle and feature estimates at each observation. 19 Jonghyuk KIM 20 Jonghyuk KIM



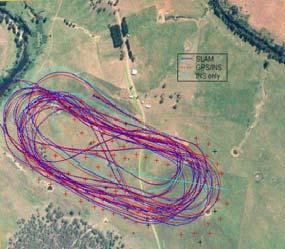
6 Example Example 21 Jonghyuk KIM 22 Jonghyuk KIM Example Example Post-Processed Results 23 Jonghyuk KIM 24 Jonghyuk KIM

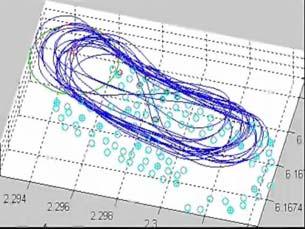
7 Example Example Real-Time Results 25 Jonghyuk KIM 26 Jonghyuk KIM Example Example 27 Jonghyuk KIM 28 Jonghyuk KIM


8 Example Example Inertial Sensors and Inertial Measurement Units Aided Structure Example 29 Jonghyuk KIM 30 Jonghyuk KIM The previous slides illustrated the process and results of using inertial SLAM on an airborne system. As part of the process of demonstrating this system, questions were asked of the accuracy required from the sensors in order to constrain the drift of the inertial system, and for certain accuracy requirements of the map. This led to asking from where particular error sources crept into the system and ho how they could be constrained. This section of the presentation will provide an overview of some of this work. 31 Jonghyuk KIM 32 Jonghyuk KIM
9 33 Jonghyuk KIM 34 Jonghyuk KIM Presentation Outlines Inertial Sensors and Inertial Measurement Units Aided Structure Example 35 Jonghyuk KIM 36 Jonghyuk KIM

10 In the previous slides which focused on sensor characteristics we were provided with the opportunity of perturbing the inertial equations. The equations developed allowed us to see how errors in the inertial navigation system propagate through the rest of the initialised feature positions. More importantly however, the process of perturbing the equations and developing this error formulation allows us to pose the question of whether a SLAM formulation can be developed from these equations. The answer is yes, and the reason why one would like to conduct such a process is because of the computational efficiency and the insight that such a process provides. The next set of slides will highlight how this efficiency takes place, and and the following set of slides on the insight such a formulation provides. 37 Jonghyuk KIM 38 Jonghyuk KIM Indirect SLAM flowchart Comparison between Direct and Indirect 39 Jonghyuk KIM 40 Jonghyuk KIM
11 Presentation Outlines Comparison between Reduced Rates Indirect Inertial Sensors and Inertial Measurement Units Aided Structure Example 41 Jonghyuk KIM 42 Jonghyuk KIM The indirect formulation of the SLAM algorithm opens up the door to the vast literature of linear control theory. We now have a linear time varying system which can be modelled as a piecewise constant system. Thus, we can now ask what the observability of SLAM is in a more mathematically precise fashion. This not only provides us with insight into the structure of the information flow, but also allows us to venture into the areas of control theory for looking at optimal technique for closing-the-loop and for observability enhancement. State Model (single feature) Observation Model Acceleration Matrix 43 Jonghyuk KIM 44 Jonghyuk KIM
12 45 Jonghyuk KIM 46 Jonghyuk KIM From the structure of Q SOM (j) the following can be observed: The observability of SLAM at the j th segment, Q SOM (j), depends on all preceding segments including the current one. The order in which the piecewise constant segments are arranged has no effect on the final observability of the system. The first and second rows in Q SOM (j) provide six linearly independent rows and repeating these at later segments does not provide any further linearly independent rows, thus does not enhance the observability of the system. [f n j ] in each segment can provide only two linearly independent rows. From a simple physical interpretation between the velocity and attitude errors, the latter can be decomposed into both an observable and an unobservable state. The observable part of the attitude error is perpendicular to the acceleration vector and can effect the velocity error, while the unobservable part is parallel to the acceleration vector. When the vehicle is either stationary (such as in the alignment process) or when it is not accelerating, the acceleration is just due to gravity (hence vertical). In this case, the unobservable state corresponds to the heading error. 47 Jonghyuk KIM However, when the vehicle undergoes acceleration along the other axes, the unobservable state is no longer in the vertical axis and is the combination of the three Euler angles. That is, the unobservable state is in the direction of the acceleration vector. Accordingly H ip [f n j ] can provide only two linearly independent rows at each segments. However, if [f n j ] changes between separate segments, for example through a platform maneuver, it can enhance the observability. What is interesting is that the range, bearing and elevation observation in SLAM can only provide a rank of 8 or 9 when the vehicle undergoes sufficient maneuvers such as accelerating, decelerating or turning. Since 6DoF SLAM always has a rank deficiency of three regardless of the number of landmarks within the filter, additional uncorrelated position observations that can provide three independent rows to the SOM can make SLAM fully observable. 48 Jonghyuk KIM
13 Presentation Outlines Inertial Sensors and Inertial Measurement Units Aided Structure Example 49 Jonghyuk KIM 50 Jonghyuk KIM Given a number of previously observed features and a collection of un-visited regions, how does the vehicle decide to go next? Decision making will be based on maximising the entropic mutual information gain (I) in both the vehicle pose and map location estimates. Information gain for taking an action can be calculated from the covariance of both vehicle pose and map states: In order to find the expected mutual information gain (I) of visiting an unknown area or re-visiting a feature, the current estimation covariance must be propagated (through the discrete Ricatti equation) along the expected path to the time of expected feature observation Prediction Propagation: Covariance propagation from initial time (t 0 ) to time of observation (t obs ). That is P(t 0 t 0 ) to P(t obs t 0 ). Observation Update: Covariance update for expected observation at t obs. That is, P(t obs t 0 ) to P(t obs t obs ). where, P(t 0 t 0 ) is the covariance of the estimates at the time of deciding an action to take, P(t obs t obs ) is the covariance of the estimates once the action has been taken, x is the vector of vehicle and map estimates and z is a feature observation. 51 Jonghyuk KIM 52 Jonghyuk KIM
 is calculated by the equations for augmenting a new")
14 P(t obs t obs ) is calculated by applying an information update for the expected feature observation. When re-observing a previoulsy seen feature, the covariance is calculated via: When visiting an un-explored region, expected P(t obs t obs ) is calculated by the equations for augmenting a new feature into the estimator, the location of which is given at the center of the region. When comparing to the prior covariance P(t obs t 0 ) before initializing the expected feature, P(t obs t obs ) remains same dimension and thus the information gain from the time of decision (t 0 ) will only be the information loss in the vehicle state while travelling to the region. In order to quantify some information gain in visiting an un explored region and initializing a feature, the initial covariance P(t 0 t 0 ) is augmented to account for low initial information about a yet to be seen feature: where U m are appropriately chosen large, unseen feature position uncertainties. 53 Jonghyuk KIM 54 Jonghyuk KIM 55 Jonghyuk KIM 56 Jonghyuk KIM
15 Conclusion and Future Works Further Readings The focus of this presentation was on introducing you to the area of inertial SLAM. Inertial SLAM poses a number of significant advantages as it provides for the capability of platform independence as a localisation system. In this presentation we saw the formulation of the SLAM problem in the standard EKF approach along with its indirect implementation. This indirect approach allowed for significant reductions in computation with minimal loss in accuracy, and also provided a more through understanding of how SLAM works. We also saw the beginnings of higher level decision theory in ins application to closing the loop. Immediate areas of interest include linking the observability measure closer into the decision making and improving the consistency in large scale application. Kim J.. Autonomous Navigation for Airborne Applications. PhD Thesis, Australian Centre for Field Robotics, The University of Sydney, Australia, Bryson M, Kim J. and Sukkarieh S., Information and Observability Metrics of Inertial SLAM SLAM for On-line Path-planning on an Aerial Vehicle, In IEEE International Conference on Robotics and Automation (ICRA 05), Barcelona, Spain, April 18-22, Kim J., S. Ong, E. Nettleton and S. Sukkarieh. Decentralised approach to unmanned aerial vehicle navigation without the use of global positioning system and preloaded map. In Journal of Aerospace Engineering,Institute of Mechanical Engineering, vol. 218, Part (G), Pages: , Kim J. and S. Sukkarieh. Autonomous Airborne Navigation in Unknown Terrain Environments. In IEEE Transactions on Aerospace and Electronic Systems, 40(3): , July Kim J. and S. Sukkarieh. Recasting SLAM - Towards Improving Efficiency and Platform Independency. In International Symposium on Robotics Research (ISRR 03), Siena, Italy, Jonghyuk KIM 58 Jonghyuk KIM
Information and Observability Metrics of Inertial SLAM for On-line Path-planning on an Aerial Vehicle
 Information and Observability Metrics of Inertial SLAM for On-line Path-planning on an Aerial Vehicle Mitch Bryson, Jonghyuk Kim and Salah Sukkarieh ARC Centre of Excellence in Autonomous Systems University
Information and Observability Metrics of Inertial SLAM for On-line Path-planning on an Aerial Vehicle Mitch Bryson, Jonghyuk Kim and Salah Sukkarieh ARC Centre of Excellence in Autonomous Systems University
Using the Kalman Filter for SLAM AIMS 2015
 Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
with Application to Autonomous Vehicles
 Nonlinear with Application to Autonomous Vehicles (Ph.D. Candidate) C. Silvestre (Supervisor) P. Oliveira (Co-supervisor) Institute for s and Robotics Instituto Superior Técnico Portugal January 2010 Presentation
Nonlinear with Application to Autonomous Vehicles (Ph.D. Candidate) C. Silvestre (Supervisor) P. Oliveira (Co-supervisor) Institute for s and Robotics Instituto Superior Técnico Portugal January 2010 Presentation
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo") Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Vision-Aided Navigation Based on Three-View Geometry
 Vision-Aided Navigation Based on hree-view Geometry Vadim Indelman, Pini Gurfil Distributed Space Systems Lab, Aerospace Engineering, echnion Ehud Rivlin Computer Science, echnion Hector Rotstein RAFAEL
Vision-Aided Navigation Based on hree-view Geometry Vadim Indelman, Pini Gurfil Distributed Space Systems Lab, Aerospace Engineering, echnion Ehud Rivlin Computer Science, echnion Hector Rotstein RAFAEL
Vision and IMU Data Fusion: Closed-Form Determination of the Absolute Scale, Speed and Attitude
 Vision and IMU Data Fusion: Closed-Form Determination of the Absolute Scale, Speed and Attitude Agostino Martinelli, Roland Siegwart To cite this version: Agostino Martinelli, Roland Siegwart. Vision and
Vision and IMU Data Fusion: Closed-Form Determination of the Absolute Scale, Speed and Attitude Agostino Martinelli, Roland Siegwart To cite this version: Agostino Martinelli, Roland Siegwart. Vision and
Robot Localisation. Henrik I. Christensen. January 12, 2007
 Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Evaluation of different wind estimation methods in flight tests with a fixed-wing UAV
 Evaluation of different wind estimation methods in flight tests with a fixed-wing UAV Julian Sören Lorenz February 5, 2018 Contents 1 Glossary 2 2 Introduction 3 3 Tested algorithms 3 3.1 Unfiltered Method
Evaluation of different wind estimation methods in flight tests with a fixed-wing UAV Julian Sören Lorenz February 5, 2018 Contents 1 Glossary 2 2 Introduction 3 3 Tested algorithms 3 3.1 Unfiltered Method
TOWARDS AUTONOMOUS LOCALIZATION OF AN UNDERWATER DRONE. A Thesis. presented to. the Faculty of California Polytechnic State University,
 TOWARDS AUTONOMOUS LOCALIZATION OF AN UNDERWATER DRONE A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree
TOWARDS AUTONOMOUS LOCALIZATION OF AN UNDERWATER DRONE A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree
Exact State and Covariance Sub-matrix Recovery for Submap Based Sparse EIF SLAM Algorithm
 8 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-3, 8 Exact State and Covariance Sub-matrix Recovery for Submap Based Sparse EIF SLAM Algorithm Shoudong Huang, Zhan
8 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-3, 8 Exact State and Covariance Sub-matrix Recovery for Submap Based Sparse EIF SLAM Algorithm Shoudong Huang, Zhan
Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors
 Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors GRASP Laboratory University of Pennsylvania June 6, 06 Outline Motivation Motivation 3 Problem
Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors GRASP Laboratory University of Pennsylvania June 6, 06 Outline Motivation Motivation 3 Problem
Distributed Data Fusion with Kalman Filters. Simon Julier Computer Science Department University College London
 Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
Simultaneous Localization and Map Building Using Natural features in Outdoor Environments
 Simultaneous Localization and Map Building Using Natural features in Outdoor Environments Jose Guivant, Eduardo Nebot, Hugh Durrant Whyte Australian Centre for Field Robotics Department of Mechanical and
Simultaneous Localization and Map Building Using Natural features in Outdoor Environments Jose Guivant, Eduardo Nebot, Hugh Durrant Whyte Australian Centre for Field Robotics Department of Mechanical and
Dead Reckoning navigation (DR navigation)
") Dead Reckoning navigation (DR navigation) Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai A Navigation which uses a Inertial
Dead Reckoning navigation (DR navigation) Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai A Navigation which uses a Inertial
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING
 FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
A Complementary Filter for Attitude Estimation of a Fixed-Wing UAV
 A Complementary Filter for Attitude Estimation of a Fixed-Wing UAV Mark Euston, Paul Coote, Robert Mahony, Jonghyuk Kim and Tarek Hamel Abstract This paper considers the question of using a nonlinear complementary
A Complementary Filter for Attitude Estimation of a Fixed-Wing UAV Mark Euston, Paul Coote, Robert Mahony, Jonghyuk Kim and Tarek Hamel Abstract This paper considers the question of using a nonlinear complementary
Information Exchange in Multi-rover SLAM
 nformation Exchange in Multi-rover SLAM Brandon M Jones and Lang Tong School of Electrical and Computer Engineering Cornell University, thaca, NY 53 {bmj3,lt35}@cornelledu Abstract We investigate simultaneous
nformation Exchange in Multi-rover SLAM Brandon M Jones and Lang Tong School of Electrical and Computer Engineering Cornell University, thaca, NY 53 {bmj3,lt35}@cornelledu Abstract We investigate simultaneous
ESTIMATOR STABILITY ANALYSIS IN SLAM. Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu
 ESTIMATOR STABILITY ANALYSIS IN SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu Institut de Robtica i Informtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona, 88 Spain {tvidal, cetto,
ESTIMATOR STABILITY ANALYSIS IN SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu Institut de Robtica i Informtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona, 88 Spain {tvidal, cetto,
CS 532: 3D Computer Vision 6 th Set of Notes
 1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
VN-100 Velocity Compensation
 VN-100 Velocity Compensation Velocity / Airspeed Aiding for AHRS Applications Application Note Abstract This application note describes how the VN-100 can be used in non-stationary applications which require
VN-100 Velocity Compensation Velocity / Airspeed Aiding for AHRS Applications Application Note Abstract This application note describes how the VN-100 can be used in non-stationary applications which require
Automated Tuning of the Nonlinear Complementary Filter for an Attitude Heading Reference Observer
 Automated Tuning of the Nonlinear Complementary Filter for an Attitude Heading Reference Observer Oscar De Silva, George K.I. Mann and Raymond G. Gosine Faculty of Engineering and Applied Sciences, Memorial
Automated Tuning of the Nonlinear Complementary Filter for an Attitude Heading Reference Observer Oscar De Silva, George K.I. Mann and Raymond G. Gosine Faculty of Engineering and Applied Sciences, Memorial
Two dimensional rate gyro bias estimation for precise pitch and roll attitude determination utilizing a dual arc accelerometer array
 Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections -- Two dimensional rate gyro bias estimation for precise pitch and roll attitude determination utilizing a dual
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections -- Two dimensional rate gyro bias estimation for precise pitch and roll attitude determination utilizing a dual
Measurement Observers for Pose Estimation on SE(3)
") Measurement Observers for Pose Estimation on SE(3) By Geoffrey Stacey u4308250 Supervised by Prof. Robert Mahony 24 September 2010 A thesis submitted in part fulfilment of the degree of Bachelor of Engineering
Measurement Observers for Pose Estimation on SE(3) By Geoffrey Stacey u4308250 Supervised by Prof. Robert Mahony 24 September 2010 A thesis submitted in part fulfilment of the degree of Bachelor of Engineering
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Design of Adaptive Filtering Algorithm for Relative Navigation
 Design of Adaptive Filtering Algorithm for Relative Navigation Je Young Lee, Hee Sung Kim, Kwang Ho Choi, Joonhoo Lim, Sung Jin Kang, Sebum Chun, and Hyung Keun Lee Abstract Recently, relative navigation
Design of Adaptive Filtering Algorithm for Relative Navigation Je Young Lee, Hee Sung Kim, Kwang Ho Choi, Joonhoo Lim, Sung Jin Kang, Sebum Chun, and Hyung Keun Lee Abstract Recently, relative navigation
Baro-INS Integration with Kalman Filter
 Baro-INS Integration with Kalman Filter Vivek Dadu c,b.venugopal Reddy a, Brajnish Sitara a, R.S.Chandrasekhar a & G.Satheesh Reddy a c Hindustan Aeronautics Ltd, Korwa, India. a Research Centre Imarat,
Baro-INS Integration with Kalman Filter Vivek Dadu c,b.venugopal Reddy a, Brajnish Sitara a, R.S.Chandrasekhar a & G.Satheesh Reddy a c Hindustan Aeronautics Ltd, Korwa, India. a Research Centre Imarat,
NAVIGATION OF THE WHEELED TRANSPORT ROBOT UNDER MEASUREMENT NOISE
 WMS J. Pure Appl. Math. V.7, N.1, 2016, pp.20-27 NAVIGAION OF HE WHEELED RANSPOR ROBO UNDER MEASUREMEN NOISE VLADIMIR LARIN 1 Abstract. he problem of navigation of the simple wheeled transport robot is
WMS J. Pure Appl. Math. V.7, N.1, 2016, pp.20-27 NAVIGAION OF HE WHEELED RANSPOR ROBO UNDER MEASUREMEN NOISE VLADIMIR LARIN 1 Abstract. he problem of navigation of the simple wheeled transport robot is
Vision-Aided Inertial Navigation: Closed-Form Determination of Absolute Scale, Speed and Attitude
 Vision-Aided Inertial Navigation: Closed-Form Determination of Absolute Scale, Speed and Attitude Agostino Martinelli, Chiara Troiani, Alessandro Renzaglia To cite this version: Agostino Martinelli, Chiara
Vision-Aided Inertial Navigation: Closed-Form Determination of Absolute Scale, Speed and Attitude Agostino Martinelli, Chiara Troiani, Alessandro Renzaglia To cite this version: Agostino Martinelli, Chiara
Quadrotor Modeling and Control
 16-311 Introduction to Robotics Guest Lecture on Aerial Robotics Quadrotor Modeling and Control Nathan Michael February 05, 2014 Lecture Outline Modeling: Dynamic model from first principles Propeller
16-311 Introduction to Robotics Guest Lecture on Aerial Robotics Quadrotor Modeling and Control Nathan Michael February 05, 2014 Lecture Outline Modeling: Dynamic model from first principles Propeller
Multi-Sensor Fusion for Localization of a Mobile Robot in Outdoor Environments
 Multi-Sensor Fusion for Localization of a Mobile Robot in Outdoor Environments Thomas Emter, Arda Saltoğlu and Janko Petereit Introduction AMROS Mobile platform equipped with multiple sensors for navigation
Multi-Sensor Fusion for Localization of a Mobile Robot in Outdoor Environments Thomas Emter, Arda Saltoğlu and Janko Petereit Introduction AMROS Mobile platform equipped with multiple sensors for navigation
System identification and sensor fusion in dynamical systems. Thomas Schön Division of Systems and Control, Uppsala University, Sweden.
 System identification and sensor fusion in dynamical systems Thomas Schön Division of Systems and Control, Uppsala University, Sweden. The system identification and sensor fusion problem Inertial sensors
System identification and sensor fusion in dynamical systems Thomas Schön Division of Systems and Control, Uppsala University, Sweden. The system identification and sensor fusion problem Inertial sensors
Sensors for mobile robots
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
Absolute map-based localization for a planetary rover
 Absolute map-based localization for a planetary rover Bach Van Pham, Artur Maligo and Simon Lacroix LAAS/CNRS, Toulouse Work developed within the ESA founded Startiger activity Seeker Outline" On the importance
Absolute map-based localization for a planetary rover Bach Van Pham, Artur Maligo and Simon Lacroix LAAS/CNRS, Toulouse Work developed within the ESA founded Startiger activity Seeker Outline" On the importance
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Fundamentals of High Accuracy Inertial Navigation Averil B. Chatfield Table of Contents
 Navtech Part #2440 Preface Fundamentals of High Accuracy Inertial Navigation Averil B. Chatfield Table of Contents Chapter 1. Introduction...... 1 I. Forces Producing Motion.... 1 A. Gravitation......
Navtech Part #2440 Preface Fundamentals of High Accuracy Inertial Navigation Averil B. Chatfield Table of Contents Chapter 1. Introduction...... 1 I. Forces Producing Motion.... 1 A. Gravitation......
(W: 12:05-1:50, 50-N201)
") 2015 School of Information Technology and Electrical Engineering at the University of Queensland Schedule Week Date Lecture (W: 12:05-1:50, 50-N201) 1 29-Jul Introduction Representing Position & Orientation
2015 School of Information Technology and Electrical Engineering at the University of Queensland Schedule Week Date Lecture (W: 12:05-1:50, 50-N201) 1 29-Jul Introduction Representing Position & Orientation
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Fundamentals of attitude Estimation
 Fundamentals of attitude Estimation Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Basically an IMU can used for two
Fundamentals of attitude Estimation Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Basically an IMU can used for two
Barometer-Aided Road Grade Estimation
 Barometer-Aided Road Grade Estimation Jussi Parviainen, Jani Hautamäki, Jussi Collin and Jarmo Takala Tampere University of Technology, Finland BIOGRAPHY Jussi Parviainen received his M.Sc. degree in May
Barometer-Aided Road Grade Estimation Jussi Parviainen, Jani Hautamäki, Jussi Collin and Jarmo Takala Tampere University of Technology, Finland BIOGRAPHY Jussi Parviainen received his M.Sc. degree in May
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
Sensors Fusion for Mobile Robotics localization. M. De Cecco - Robotics Perception and Action
 Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Accuracy Evaluation Method of Stable Platform Inertial Navigation System Based on Quantum Neural Network
 Accuracy Evaluation Method of Stable Platform Inertial Navigation System Based on Quantum Neural Network Chao Huang*, Guoxing Yi, Qingshuang Zen ABSTRACT This paper aims to reduce the structural complexity
Accuracy Evaluation Method of Stable Platform Inertial Navigation System Based on Quantum Neural Network Chao Huang*, Guoxing Yi, Qingshuang Zen ABSTRACT This paper aims to reduce the structural complexity
Delayed Fusion of Relative State Measurements by Extending Stochastic Cloning via Direct Kalman Filtering
 Delayed Fusion of Relative State Measurements by Extending Stochastic Cloning via Direct Kalman Filtering Ehsan Asadi and Carlo L Bottasso Department of Aerospace Science and echnology Politecnico di Milano,
Delayed Fusion of Relative State Measurements by Extending Stochastic Cloning via Direct Kalman Filtering Ehsan Asadi and Carlo L Bottasso Department of Aerospace Science and echnology Politecnico di Milano,
SENSITIVITY ANALYSIS OF MULTIPLE FAULT TEST AND RELIABILITY MEASURES IN INTEGRATED GPS/INS SYSTEMS
 Arcves of Photogrammetry, Cartography and Remote Sensing, Vol., 011, pp. 5-37 ISSN 083-14 SENSITIVITY ANALYSIS OF MULTIPLE FAULT TEST AND RELIABILITY MEASURES IN INTEGRATED GPS/INS SYSTEMS Ali Almagbile
Arcves of Photogrammetry, Cartography and Remote Sensing, Vol., 011, pp. 5-37 ISSN 083-14 SENSITIVITY ANALYSIS OF MULTIPLE FAULT TEST AND RELIABILITY MEASURES IN INTEGRATED GPS/INS SYSTEMS Ali Almagbile
Scalable Sparsification for Efficient Decision Making Under Uncertainty in High Dimensional State Spaces
 Scalable Sparsification for Efficient Decision Making Under Uncertainty in High Dimensional State Spaces IROS 2017 KHEN ELIMELECH ROBOTICS AND AUTONOMOUS SYSTEMS PROGRAM VADIM INDELMAN DEPARTMENT OF AEROSPACE
Scalable Sparsification for Efficient Decision Making Under Uncertainty in High Dimensional State Spaces IROS 2017 KHEN ELIMELECH ROBOTICS AND AUTONOMOUS SYSTEMS PROGRAM VADIM INDELMAN DEPARTMENT OF AEROSPACE
Nonlinear Wind Estimator Based on Lyapunov
 Nonlinear Based on Lyapunov Techniques Pedro Serra ISR/DSOR July 7, 2010 Pedro Serra Nonlinear 1/22 Outline 1 Motivation Problem 2 Aircraft Dynamics Guidance Control and Navigation structure Guidance Dynamics
Nonlinear Based on Lyapunov Techniques Pedro Serra ISR/DSOR July 7, 2010 Pedro Serra Nonlinear 1/22 Outline 1 Motivation Problem 2 Aircraft Dynamics Guidance Control and Navigation structure Guidance Dynamics
Inertial Navigation and Various Applications of Inertial Data. Yongcai Wang. 9 November 2016
 Inertial Navigation and Various Applications of Inertial Data Yongcai Wang 9 November 2016 Types of Gyroscope Mechanical Gyroscope Laser Gyroscope Sagnac Effect Stable Platform IMU and Strapdown IMU In
Inertial Navigation and Various Applications of Inertial Data Yongcai Wang 9 November 2016 Types of Gyroscope Mechanical Gyroscope Laser Gyroscope Sagnac Effect Stable Platform IMU and Strapdown IMU In
Influence Analysis of Star Sensors Sampling Frequency on Attitude Determination Accuracy
 Sensors & ransducers Vol. Special Issue June pp. -8 Sensors & ransducers by IFSA http://www.sensorsportal.com Influence Analysis of Star Sensors Sampling Frequency on Attitude Determination Accuracy Yuanyuan
Sensors & ransducers Vol. Special Issue June pp. -8 Sensors & ransducers by IFSA http://www.sensorsportal.com Influence Analysis of Star Sensors Sampling Frequency on Attitude Determination Accuracy Yuanyuan
RELATIVE NAVIGATION FOR SATELLITES IN CLOSE PROXIMITY USING ANGLES-ONLY OBSERVATIONS
 (Preprint) AAS 12-202 RELATIVE NAVIGATION FOR SATELLITES IN CLOSE PROXIMITY USING ANGLES-ONLY OBSERVATIONS Hemanshu Patel 1, T. Alan Lovell 2, Ryan Russell 3, Andrew Sinclair 4 "Relative navigation using
(Preprint) AAS 12-202 RELATIVE NAVIGATION FOR SATELLITES IN CLOSE PROXIMITY USING ANGLES-ONLY OBSERVATIONS Hemanshu Patel 1, T. Alan Lovell 2, Ryan Russell 3, Andrew Sinclair 4 "Relative navigation using
Sensor Aided Inertial Navigation Systems
 Arvind Ramanandan Department of Electrical Engineering University of California, Riverside Riverside, CA 92507 April, 28th 2011 Acknowledgements: 1 Prof. Jay A. Farrell 2 Anning Chen 3 Anh Vu 4 Prof. Matthew
Arvind Ramanandan Department of Electrical Engineering University of California, Riverside Riverside, CA 92507 April, 28th 2011 Acknowledgements: 1 Prof. Jay A. Farrell 2 Anning Chen 3 Anh Vu 4 Prof. Matthew
Lecture. Aided INS EE 570: Location and Navigation. 1 Overview. 1.1 ECEF as and Example. 1.2 Inertial Measurements
 Lecture Aided EE 570: Location and Navigation Lecture Notes Update on April 13, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico Tech In collaoration with Stephen Bruder,
Lecture Aided EE 570: Location and Navigation Lecture Notes Update on April 13, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico Tech In collaoration with Stephen Bruder,
A Study of Covariances within Basic and Extended Kalman Filters
 A Study of Covariances within Basic and Extended Kalman Filters David Wheeler Kyle Ingersoll December 2, 2013 Abstract This paper explores the role of covariance in the context of Kalman filters. The underlying
A Study of Covariances within Basic and Extended Kalman Filters David Wheeler Kyle Ingersoll December 2, 2013 Abstract This paper explores the role of covariance in the context of Kalman filters. The underlying
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
One Approach to the Integration of Inertial and Visual Navigation Systems
 FATA UNIVERSITATIS (NIŠ) SER.: ELE. ENERG. vol. 18, no. 3, December 2005, 479-491 One Approach to the Integration of Inertial and Visual Navigation Systems Dedicated to Professor Milić Stojić on the occasion
FATA UNIVERSITATIS (NIŠ) SER.: ELE. ENERG. vol. 18, no. 3, December 2005, 479-491 One Approach to the Integration of Inertial and Visual Navigation Systems Dedicated to Professor Milić Stojić on the occasion
Autonomous Vision Based Detection of Non-stellar Objects Flying in Formation with Camera Point of View
 Autonomous Vision Based Detection of Non-stellar Objects Flying in Formation with Camera Point of View As.Prof. M. Benn (1), Prof. J. L. Jørgensen () (1) () DTU Space, Elektrovej 37, 4553438, mb@space.dtu.dk,
Autonomous Vision Based Detection of Non-stellar Objects Flying in Formation with Camera Point of View As.Prof. M. Benn (1), Prof. J. L. Jørgensen () (1) () DTU Space, Elektrovej 37, 4553438, mb@space.dtu.dk,
A Study of the Effects of Stochastic Inertial Sensor Errors. in Dead-Reckoning Navigation
 A Study of the Effects of Stochastic Inertial Sensor Errors in Dead-Reckoning Navigation Except where reference is made to the work of others, the work described in this thesis is my own or was done in
A Study of the Effects of Stochastic Inertial Sensor Errors in Dead-Reckoning Navigation Except where reference is made to the work of others, the work described in this thesis is my own or was done in
Local Reference Filter for Life-Long Vision Aided Inertial Navigation
 Local Reference Filter for Life-Long Vision Aided Inertial Navigation Korbinian Schmid Department of Perception and Cognition Robotics and Mechatronics Center German Aerospace Center (DLR Email: Korbinian.Schmid@dlr.de
Local Reference Filter for Life-Long Vision Aided Inertial Navigation Korbinian Schmid Department of Perception and Cognition Robotics and Mechatronics Center German Aerospace Center (DLR Email: Korbinian.Schmid@dlr.de
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
IMU-Camera Calibration: Observability Analysis
 IMU-Camera Calibration: Observability Analysis Faraz M. Mirzaei and Stergios I. Roumeliotis {faraz stergios}@cs.umn.edu Dept. of Computer Science & Engineering University of Minnesota Minneapolis, MN 55455
IMU-Camera Calibration: Observability Analysis Faraz M. Mirzaei and Stergios I. Roumeliotis {faraz stergios}@cs.umn.edu Dept. of Computer Science & Engineering University of Minnesota Minneapolis, MN 55455
Autonomous Navigation, Guidance and Control of Small 4-wheel Electric Vehicle
 Journal of Asian Electric Vehicles, Volume 10, Number 1, June 01 Autonomous Navigation, Guidance and Control of Small 4-wheel Electric Vehicle Satoshi Suzuki International Young Researchers Empowerment
Journal of Asian Electric Vehicles, Volume 10, Number 1, June 01 Autonomous Navigation, Guidance and Control of Small 4-wheel Electric Vehicle Satoshi Suzuki International Young Researchers Empowerment
Towards airborne seismic. Thomas Rapstine & Paul Sava
 Towards airborne seismic Thomas Rapstine & Paul Sava Research goal measure a strong motion signal from an airborne platform 2 Proposed method Monitor ground motion from an UAV using cameras Unmanned Aerial
Towards airborne seismic Thomas Rapstine & Paul Sava Research goal measure a strong motion signal from an airborne platform 2 Proposed method Monitor ground motion from an UAV using cameras Unmanned Aerial
Estimation and Control of a Quadrotor Attitude
 Estimation and Control of a Quadrotor Attitude Bernardo Sousa Machado Henriques Mechanical Engineering Department, Instituto Superior Técnico, Lisboa, Portugal E-mail: henriquesbernardo@gmail.com Abstract
Estimation and Control of a Quadrotor Attitude Bernardo Sousa Machado Henriques Mechanical Engineering Department, Instituto Superior Técnico, Lisboa, Portugal E-mail: henriquesbernardo@gmail.com Abstract
Integration of a strapdown gravimeter system in an Autonomous Underwater Vehicle
 Integration of a strapdown gravimeter system in an Autonomous Underwater Vehicle Clément ROUSSEL PhD - Student (L2G - Le Mans - FRANCE) April 17, 2015 Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015
Integration of a strapdown gravimeter system in an Autonomous Underwater Vehicle Clément ROUSSEL PhD - Student (L2G - Le Mans - FRANCE) April 17, 2015 Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015
been developed to calibrate for systematic errors of a two wheel robot. This method has been used by other authors (Chong, 1997). Goel, Roumeliotis an
. Goel, Roumeliotis an") MODELING AND ESTIMATING THE ODOMETRY ERROR OF A MOBILE ROBOT Agostino Martinelli Λ Λ Dipartimento di Informatica, Sistemi e Produzione, Universit a degli Studi di Roma Tor Vergata", Via di Tor Vergata,
MODELING AND ESTIMATING THE ODOMETRY ERROR OF A MOBILE ROBOT Agostino Martinelli Λ Λ Dipartimento di Informatica, Sistemi e Produzione, Universit a degli Studi di Roma Tor Vergata", Via di Tor Vergata,
Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter
 Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter Ali Karimoddini, Guowei Cai, Ben M. Chen, Hai Lin and Tong H. Lee Graduate School for Integrative Sciences and Engineering,
Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter Ali Karimoddini, Guowei Cai, Ben M. Chen, Hai Lin and Tong H. Lee Graduate School for Integrative Sciences and Engineering,
2010 Small Satellite Systems and Services Symposium - Funchal, Madeira, Portugal 1
 INTERACTIONS OF POSE ESTIMATION AND ONLINE DYNAMIC MODELING FOR A SMALL INSPECTOR SPACECRAFT Mishari Alarfaj 1 and Forrest Rogers-Marcovitz 2 1 ECE Dept., Carnegie Mellon University, Pittsburgh, PA, USA,
INTERACTIONS OF POSE ESTIMATION AND ONLINE DYNAMIC MODELING FOR A SMALL INSPECTOR SPACECRAFT Mishari Alarfaj 1 and Forrest Rogers-Marcovitz 2 1 ECE Dept., Carnegie Mellon University, Pittsburgh, PA, USA,
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
EE 570: Location and Navigation
 EE 570: Location and Navigation Aided INS Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen Bruder Electrical and Computer
EE 570: Location and Navigation Aided INS Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen Bruder Electrical and Computer
On the Treatment of Relative-Pose Measurements for Mobile Robot Localization
 On the Treatment of Relative-Pose Measurements for Mobile Robot Localization Anastasios I. Mourikis and Stergios I. Roumeliotis Dept. of Computer Science & Engineering, University of Minnesota, Minneapolis,
On the Treatment of Relative-Pose Measurements for Mobile Robot Localization Anastasios I. Mourikis and Stergios I. Roumeliotis Dept. of Computer Science & Engineering, University of Minnesota, Minneapolis,
POSITION ESTIMATION AND CONTROL OF LOAD SWAY IN QUAY-CRANES
 POSITION ESTIMATION AND CONTROL OF LOAD SWAY IN QUAY-CRANES M.A. LOUDA, M. STEVENS, M.W.M.G. DISSANAYAKE & D.C. RYE Australian Centre for Field Robotics The University of Sydney 26 NSW, Australia. email:
POSITION ESTIMATION AND CONTROL OF LOAD SWAY IN QUAY-CRANES M.A. LOUDA, M. STEVENS, M.W.M.G. DISSANAYAKE & D.C. RYE Australian Centre for Field Robotics The University of Sydney 26 NSW, Australia. email:
Vision-Based Estimation and Tracking Using Multiple Unmanned Aerial Vehicles. Mingfeng Zhang
 Vision-Based Estimation and Tracking Using Multiple Unmanned Aerial Vehicles by Mingfeng Zhang A thesis submitted in conformity with the requirements for the degree of Doctor of Philosophy Graduate Department
Vision-Based Estimation and Tracking Using Multiple Unmanned Aerial Vehicles by Mingfeng Zhang A thesis submitted in conformity with the requirements for the degree of Doctor of Philosophy Graduate Department
A First-Estimates Jacobian EKF for Improving SLAM Consistency
 A First-Estimates Jacobian EKF for Improving SLAM Consistency Guoquan P. Huang 1, Anastasios I. Mourikis 1,2, and Stergios I. Roumeliotis 1 1 Dept. of Computer Science and Engineering, University of Minnesota,
A First-Estimates Jacobian EKF for Improving SLAM Consistency Guoquan P. Huang 1, Anastasios I. Mourikis 1,2, and Stergios I. Roumeliotis 1 1 Dept. of Computer Science and Engineering, University of Minnesota,
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Cooperative Motion Control of Multiple Autonomous Marine
 Cooperative Motion Control of Multiple Autonomous Marine Collision Avoidance in Dynamic Environments EECI Graduate School on Control Supélec, Feb. 21-25, 2011 Outline Motivation/Objectives Cooperative
Cooperative Motion Control of Multiple Autonomous Marine Collision Avoidance in Dynamic Environments EECI Graduate School on Control Supélec, Feb. 21-25, 2011 Outline Motivation/Objectives Cooperative
State observers for invariant dynamics on a Lie group
 State observers for invariant dynamics on a Lie group C. Lageman, R. Mahony, J. Trumpf 1 Introduction This paper concerns the design of full state observers for state space systems where the state is evolving
State observers for invariant dynamics on a Lie group C. Lageman, R. Mahony, J. Trumpf 1 Introduction This paper concerns the design of full state observers for state space systems where the state is evolving
Sensor Fusion of Inertial-Odometric Navigation as a Function of the Actual Manoeuvres of Autonomous Guided Vehicles
 Sensor Fusion of Inertial-Odometric Navigation as a Function of the Actual Manoeuvres of Autonomous Guided Vehicles Mariolino De Cecco Address: CISAS, Centre of Studies and Activities for Space, Via Venezia
Sensor Fusion of Inertial-Odometric Navigation as a Function of the Actual Manoeuvres of Autonomous Guided Vehicles Mariolino De Cecco Address: CISAS, Centre of Studies and Activities for Space, Via Venezia
Adaptive Estimation of Measurement Bias in Six Degree of Freedom Inertial Measurement Units: Theory and Preliminary Simulation Evaluation
 Adaptive Estimation of Measurement Bias in Six Degree of Freedom Inertial Measurement Units: Theory and Preliminary Simulation Evaluation Andrew R. Spielvogel and Louis L. Whitcomb Abstract Six-degree
Adaptive Estimation of Measurement Bias in Six Degree of Freedom Inertial Measurement Units: Theory and Preliminary Simulation Evaluation Andrew R. Spielvogel and Louis L. Whitcomb Abstract Six-degree
Visual Feedback Attitude Control of a Bias Momentum Micro Satellite using Two Wheels
 Visual Feedback Attitude Control of a Bias Momentum Micro Satellite using Two Wheels Fuyuto Terui a, Nobutada Sako b, Keisuke Yoshihara c, Toru Yamamoto c, Shinichi Nakasuka b a National Aerospace Laboratory
Visual Feedback Attitude Control of a Bias Momentum Micro Satellite using Two Wheels Fuyuto Terui a, Nobutada Sako b, Keisuke Yoshihara c, Toru Yamamoto c, Shinichi Nakasuka b a National Aerospace Laboratory
EE565:Mobile Robotics Lecture 6
 EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
Lecture 13 Visual Inertial Fusion
 Lecture 13 Visual Inertial Fusion Davide Scaramuzza Outline Introduction IMU model and Camera-IMU system Different paradigms Filtering Maximum a posteriori estimation Fix-lag smoothing 2 What is an IMU?
Lecture 13 Visual Inertial Fusion Davide Scaramuzza Outline Introduction IMU model and Camera-IMU system Different paradigms Filtering Maximum a posteriori estimation Fix-lag smoothing 2 What is an IMU?
Inertial Navigation System Aided by GPS and Selective Frequency Contents of Vector Measurements
 Inertial Navigation System Aided by GPS and Selective Frequency Contents of Vector Measurements J.F. Vasconcelos, P. Oliveira, Carlos Silvestre Instituto Superior Técnico, Institute for Systems and Robotics,
Inertial Navigation System Aided by GPS and Selective Frequency Contents of Vector Measurements J.F. Vasconcelos, P. Oliveira, Carlos Silvestre Instituto Superior Técnico, Institute for Systems and Robotics,
Research Article Error Modeling, Calibration, and Nonlinear Interpolation Compensation Method of Ring Laser Gyroscope Inertial Navigation System
 Abstract and Applied Analysis Volume 213, Article ID 359675, 7 pages http://dx.doi.org/1.1155/213/359675 Research Article Error Modeling, Calibration, and Nonlinear Interpolation Compensation Method of
Abstract and Applied Analysis Volume 213, Article ID 359675, 7 pages http://dx.doi.org/1.1155/213/359675 Research Article Error Modeling, Calibration, and Nonlinear Interpolation Compensation Method of
Sensor-based Simultaneous Localization and Mapping Part I: GAS Robocentric Filter
 Sensor-based Simultaneous Localization and Mapping Part I: GAS Robocentric Filter Bruno J Guerreiro, Pedro Batista, Carlos Silvestre, and Paulo Oliveira Abstract This paper presents the design, analysis,
Sensor-based Simultaneous Localization and Mapping Part I: GAS Robocentric Filter Bruno J Guerreiro, Pedro Batista, Carlos Silvestre, and Paulo Oliveira Abstract This paper presents the design, analysis,
Vision for Mobile Robot Navigation: A Survey
 Vision for Mobile Robot Navigation: A Survey (February 2002) Guilherme N. DeSouza & Avinash C. Kak presentation by: Job Zondag 27 February 2009 Outline: Types of Navigation Absolute localization (Structured)
Vision for Mobile Robot Navigation: A Survey (February 2002) Guilherme N. DeSouza & Avinash C. Kak presentation by: Job Zondag 27 February 2009 Outline: Types of Navigation Absolute localization (Structured)
Adaptive Unscented Kalman Filter with Multiple Fading Factors for Pico Satellite Attitude Estimation
 Adaptive Unscented Kalman Filter with Multiple Fading Factors for Pico Satellite Attitude Estimation Halil Ersin Söken and Chingiz Hajiyev Aeronautics and Astronautics Faculty Istanbul Technical University
Adaptive Unscented Kalman Filter with Multiple Fading Factors for Pico Satellite Attitude Estimation Halil Ersin Söken and Chingiz Hajiyev Aeronautics and Astronautics Faculty Istanbul Technical University
Observability-based Local Path Planning and Collision Avoidance Using Bearing-only Measurements
 Observability-based Local Path Planning and Collision Avoidance Using Bearing-only Measurements Huili Yu a,, Rajnikant Sharma a, Randal W. Beard a, Clark N. Taylor b a Department of Electrical and Computer
Observability-based Local Path Planning and Collision Avoidance Using Bearing-only Measurements Huili Yu a,, Rajnikant Sharma a, Randal W. Beard a, Clark N. Taylor b a Department of Electrical and Computer
On the Observability and Self-Calibration of Visual-Inertial Navigation Systems
 Center for Robotics and Embedded Systems University of Southern California Technical Report CRES-08-005 R B TIC EMBEDDED SYSTEMS LABORATORY On the Observability and Self-Calibration of Visual-Inertial
Center for Robotics and Embedded Systems University of Southern California Technical Report CRES-08-005 R B TIC EMBEDDED SYSTEMS LABORATORY On the Observability and Self-Calibration of Visual-Inertial
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
State Estimation for Autopilot Control of Small Unmanned Aerial Vehicles in Windy Conditions
 University of Colorado, Boulder CU Scholar Aerospace Engineering Sciences Graduate Theses & Dissertations Aerospace Engineering Sciences Summer 7-23-2014 State Estimation for Autopilot Control of Small
University of Colorado, Boulder CU Scholar Aerospace Engineering Sciences Graduate Theses & Dissertations Aerospace Engineering Sciences Summer 7-23-2014 State Estimation for Autopilot Control of Small
Vlad Estivill-Castro. Robots for People --- A project for intelligent integrated systems
 1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 5, JUNE
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 53, NO 5, JUNE 2008 1203 Nonlinear Complementary Filters on the Special Orthogonal Group Robert Mahony, Senior Member, IEEE, Tarek Hamel, Member, IEEE, and Jean-Michel
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 53, NO 5, JUNE 2008 1203 Nonlinear Complementary Filters on the Special Orthogonal Group Robert Mahony, Senior Member, IEEE, Tarek Hamel, Member, IEEE, and Jean-Michel
Navigation System for Reusable Launch Vehicle
 AAS 8-76 Navigation System for Reusable Launch Vehicle Markus Schlotterer German Aerospace Center (DLR) 31 st ANNUAL AAS GUIDANCE AND CONTROL CONFERENCE February 1-6, 28 Breckenridge, Colorado Sponsored
AAS 8-76 Navigation System for Reusable Launch Vehicle Markus Schlotterer German Aerospace Center (DLR) 31 st ANNUAL AAS GUIDANCE AND CONTROL CONFERENCE February 1-6, 28 Breckenridge, Colorado Sponsored
Sigma-Point Kalman Filters for Integrated Navigation
 Sigma-Point Kalman Filters for Integrated Navigation Rudolph van der Merwe and Eric A. Wan Adaptive Systems Lab, OGI School of Science & Engineering, Oregon Health & Science University BIOGRAPHY Rudolph
Sigma-Point Kalman Filters for Integrated Navigation Rudolph van der Merwe and Eric A. Wan Adaptive Systems Lab, OGI School of Science & Engineering, Oregon Health & Science University BIOGRAPHY Rudolph
Mathematical Modelling and Dynamics Analysis of Flat Multirotor Configurations
 Mathematical Modelling and Dynamics Analysis of Flat Multirotor Configurations DENIS KOTARSKI, Department of Mechanical Engineering, Karlovac University of Applied Sciences, J.J. Strossmayera 9, Karlovac,
Mathematical Modelling and Dynamics Analysis of Flat Multirotor Configurations DENIS KOTARSKI, Department of Mechanical Engineering, Karlovac University of Applied Sciences, J.J. Strossmayera 9, Karlovac,
Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements
 Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
Unscented Transformation of Vehicle States in SLAM
 Unscented Transformation of Vehicle States in SLAM Juan Andrade-Cetto Teresa Vidal-Calleja Alberto Sanfeliu Institut de Robòtica I Informàtica Industrial, UPC-CSIC, SPAIN ICRA 2005, Barcelona 12/06/2005
Unscented Transformation of Vehicle States in SLAM Juan Andrade-Cetto Teresa Vidal-Calleja Alberto Sanfeliu Institut de Robòtica I Informàtica Industrial, UPC-CSIC, SPAIN ICRA 2005, Barcelona 12/06/2005
Arrow Brasil. Rodrigo Rodrigues Field Application Engineer F: Date: 30/01/2014 TM 2
 TM Arrow Brasil Rodrigo Rodrigues Field Application Engineer Rodrigo.rodrigues@arrowbrasil.com.br F:+55 11 3613-9331 Date: 30/01/2014 TM 2 State-of-the-art review Introduction How a Gyro Works Performance
TM Arrow Brasil Rodrigo Rodrigues Field Application Engineer Rodrigo.rodrigues@arrowbrasil.com.br F:+55 11 3613-9331 Date: 30/01/2014 TM 2 State-of-the-art review Introduction How a Gyro Works Performance
Control of the Laser Interferometer Space Antenna
 Control of the Laser Interferometer Space Antenna P. G. Maghami, T. T. Hyde NASA Goddard Space Flight Center Guidance, Navigation and Control Division Greenbelt, MD 20771 J. Kim Swales Aerospace, Inc.
Control of the Laser Interferometer Space Antenna P. G. Maghami, T. T. Hyde NASA Goddard Space Flight Center Guidance, Navigation and Control Division Greenbelt, MD 20771 J. Kim Swales Aerospace, Inc.
Fuzzy Adaptive Kalman Filtering for INS/GPS Data Fusion
 A99936769 AMA-99-4307 Fuzzy Adaptive Kalman Filtering for INS/GPS Data Fusion J.Z. Sasiadek* and Q. Wang** Dept. of Mechanical & Aerospace Engineering Carleton University 1125 Colonel By Drive, Ottawa,
A99936769 AMA-99-4307 Fuzzy Adaptive Kalman Filtering for INS/GPS Data Fusion J.Z. Sasiadek* and Q. Wang** Dept. of Mechanical & Aerospace Engineering Carleton University 1125 Colonel By Drive, Ottawa,