Filtering in the Frequency Domain
|
|
|
- Shawn Floyd
- 6 years ago
- Views:
Transcription
1 Filtering in the Frequency Domain
2 Outline Fourier Transform Filtering in Fourier Transform Domain 2/20/2014 2

3 Fourier Series and Fourier Transform: History Jean Baptiste Joseph Fourier, French mathematician and physicist (03/21/ /16/1830) Orphaned: at nine Egyptian expedition with Napoleon I: 1798 Governor of Lower Egypt Permanent Secretary of the French Academy of Sciences: 1822 Théorie analytique de la chaleur : 1822 (The Analytic Theory of Heat) 2/20/2014 3
4 Fourier Series and Fourier Transform: History Fourier Series Any periodic function can be expressed as the sum of sines and /or cosines of different frequencies, each multiplied by a different coefficients Fourier Transform Any function that is not periodic can be expressed as the integral of sines and /or cosines multiplied by a weighing function 2/20/2014 4
5 Fourier Series: Example 2/20/2014 5
 C = C (cosθ + jsin θ) Using Euler's formula, j C = C e θ 2/20/2014 6")
6 Preliminary Concepts j = 1, a complex number C = R + ji the conjugate C* = R - ji 2 2 C = R + I and θ = arctan( I / R) C = C (cosθ + jsin θ) Using Euler's formula, j C = C e θ 2/20/2014 6
7 Fourier Series A function f( t) of a continuous variable t that is periodic with period, T, can be expressed as the sum of sines and cosines multiplied by appropriate coefficients where f() t = n= ce n 2π n j t T 2π n 1 T /2 j t T cn = f ( t) e dt for n = 0, ± 1, ± 2,... T T /2 2/20/2014 7
8 Impulses and the Sifting Property (1) A unit impulse of a continuous variable t located at t=0, denoted δ ( t), defined as if t = 0 δ () t = 0 if t 0 and is constrained also to satisfy the identity δ ( t) dt = 1 The sifting property f () t δ () t dt = f (0) f () t δ ( t t0) dt = f t0 2/20/ ( )
9 Impulses and the Sifting Property (2) A unit impulse of a discrete variable x located at x=0, denoted δ ( x), defined as 1 if x = 0 δ ( x) = 0 if x 0 and is constrained also to satisfy the identity x= δ ( x) = 1 The sifting property x= f( x) δ ( x) = f(0) x= f( x) δ ( x x ) = f( x ) 0 0 2/20/2014 9
10 Impulses and the Sifting Property (3) impulse train s T ( t), s T () t = δ ( t n T) n= 2/20/
11 Fourier Transform: One Continuous Variable The Fourier Transform of a continous function f ( t) j2πµ t F( µ ) { f()} t f() t e dt =I = The Inverse Fourier Transform of F( µ ) 1 2 f( t) { F( )} F( ) e j πµ t d =I µ = µ µ 2/20/
12 Fourier Transform: One Continuous Variable W /2 j2πµ t j2πµ t F( µ ) = f () t e dt = Ae dt W /2 A A = j = j W j2πµ t W /2 jπµ W jπµ W e e e 2πµ W /2 2π sin( πµ W ) = AW ( πµ W ) 2/20/
13 Fourier Transform: Impulses The Fourier transform of a unit impulse located at the origin: j2πµ t F( µ ) = δ() t e dt = e =1 j2πµ 0 The Fourier transform of a unit impulse located at t = t : j2πµ t F( µ ) = δ( t t0) e dt = e j2πµ t 0 =cos(2 πµ t ) jsin (2 πµ t ) /20/
14 Fourier Transform: Impulse Trains Impulse train s T(), t s T() t = δ ( t n T ) The Fourier series: where s () t = c e T n= n= 2π n j t T 2π n 1 T /2 j t T cn = s () T /2 T t e dt T n 2/20/
15 Fourier Transform: Impulse Trains 2πn 2πn 2πn j πµ t j πµ t I e = e e dt = e e dt 2πn 2πn c j 1 T/2 s 1 /2 () t e j t T j t T dt T n = () t e = T t j dt T/2 T δ T T t j t 2 2 T T T / = e = n Tj2 π ( µ T) t n T = e dt = δ ( µ ) T n n I = e du s T() t = c e = 1 2π n j t 2π n 2 ( ) T 1 ( j t ) j πµ δ µ δ µ t T n T= e T n= 2π nt T n= j T e 2/20/
16 Fourier Transform: Impulse Trains Let S( µ ) denote the Fourier transform of the periodic impulse train S ( t) T 1 S( µ ) S T () t e T n= 2π n j t { } T =I =I 2π n 1 j t T = I e T n= 1 n = δ ( µ ) T T n= 2/20/
17 Fourier Transform and Convolution The convolution of two functions is denoted by the operator f() t ht () = f( τ) ht ( τ) dτ I = j2 { () ()} ( τ) ( τ) τ πµ t f t ht f ht d e dt j2πµ t = f ( τ) h( t τ) e dt dτ j2πµτ = f( τ ) H( µ ) e dτ j2πµτ H f e d = ( µ ) ( τ) τ = H( µ ) F( µ ) 2/20/
18 Fourier Transform and Convolution Fourier Transform Pairs f() t ht () H( µ ) F( µ ) f() tht () H( µ ) F( µ ) 2/20/
 t s () t T = f() t δ ( t n T) n= 2/20/2014")
19 Fourier Transform of Sampled Functions f () t = f() t s () t T = f() t δ ( t n T) n= 2/20/
20 Fourier Transform of Sampled Functions F ( µ ) =I { f () t } =I { f() t s ()} T t = F( µ )? S( µ ) F ( µ ) = F1 ( µ ) S( µ ) = n F( τ ) S( µ τ) dτ S( µ ) = δ ( µ ) 1 T n= T n = F( τ) δ ( µ τ ) dτ T T n= 1 n = F( τδµ ) ( τ ) dτ T T n= 1 n = F( µ ) T T n= 2/20/
21 Question The Fourier transform of the sampled function (shown in the following figure) is 1. Continuous 2. Discrete 2/20/
22 Fourier Transform of Sampled Functions A bandlimited signal is a signal whose Fourier transform is zero above a certain finite frequency. In other words, if the Fourier transform has finite support then the signal is said to be bandlimited. An example of a simple bandlimited signal is a sinusoid of the form, x( t) = sin(2 π ft + θ) 2/20/
23 Fourier Transform of Sampled Functions F ( µ ) = 1 T n= n F( µ ) T µ max µ max Over-sampling 2/20/ T > 2µ max Critically-sampling 1 T = 2µ max under-sampling 1 T < 2µ max
24 Nyquist Shannon sampling theorem We can recover f() tfrom its sampled version if we can isolate a copy of F ( µ ) from the periodic sequence of copies of this function contained in F ( µ ), the transform of the sampled function f () t Sufficient separation is guaranteed if 1 T 2µ Sampling theorem: A continuous, band-limited function can be recovered completely from a set of its samples if the samples are acquired at a rate exceeding twice the highest frequency content of the function > max 2/20/
 ( ) j πµ t f t = F µ e dµ")
25 Nyquist Shannon sampling theorem? 2 () ( ) j πµ t f t = F µ e dµ 2/20/
26 Aliasing If a band-limited function is sampled at a rate that is less than twice its highest frequency? The inverse transform will yield a corrupted function. This effect is known as frequency aliasing or simply as aliasing. 2/20/
27 Aliasing 2/20/
28 Aliasing 2/20/
29 Function Reconstruction from Sampled Data F( µ ) = H( µ ) F ( µ ) 1 { F µ } f() t = I ( ) = I 1 { H( µ ) F ( µ )} = ht () f () t [ ] f( t) = f( n T)sinc ( t n T) / n T n= 2/20/
30 The Discrete Fourier Transform (DFT) of One Variable M 1 j2 πµ xm / ( µ ) ( ), µ 0,1,..., 1 F = f xe = M x= 0 1 f x = F µ e x= M M M 1 j2 πµ xm / ( ) ( ), 0,1,2,..., 1 µ = 0 2/20/
31 2-D Impulse and Sifting Property: Continuous The impulse δ( tz, ), δ( tz, ) if t = z = 0 = 0 otherwise and δ ( t, z) dtdz = 1 The sifting property and f (, t z) δ (, t z) dtdz = f (0,0) f (, t z) δ ( t t, z z ) dtdz = f ( t, z ) /20/
32 2-D Impulse and Sifting Property: Discrete The impulse δ( xy, ), δ( xy, ) 1 if x= y = 0 = 0 otherwise The sifting property and x= y= x= y= f( xy, ) δ ( xy, ) = f(0,0) f( x, y) δ ( x x, y y ) = f( x, y ) /20/
33 2-D Fourier Transform: Continuous and j2 π ( µ t+ νz) F( µν, ) = f (, t z) e dtdz j2 π ( µ t+ νz) ftz (, ) = f(, ) e d d µν µ ν 2/20/
34 2-D Fourier Transform: Continuous j2 π ( µ t+ νz) F( µν, ) = f (, t z) e dtdz = T/2 Z/2 T/2 Z/2 Ae j2 π ( µ t+ νz) dtdz sin( πµ T) sin( πνt) = ATZ πµ T πνt 2/20/
 = δ ( t m Tz, n Z) T Z m= n=")
35 2-D Sampling and 2-D Sampling Theorem 2 D impulse train: s (, tz) = δ ( t m Tz, n Z) T Z m= n= 2/20/
36 2-D Sampling and 2-D Sampling Theorem Function ftz (, ) is said to be band-limited if its Fourier transform is 0 outside a rectangle established by the intervals [- µ, µ ] and [- ν, ν ], that is max max F( µν, ) = 0 for µ µ and ν ν x max max Two-dimensional sampling theorem: A continuous, band-limited function ftz (, ) can be recovered with no error from a set of its samples if the sampling intervals are 1 1 T< and Z< 2µ 2ν max ma max max 2/20/

37 2-D Sampling and 2-D Sampling Theorem 2/20/

38 Aliasing in Images: Example In an image system, the number of samples is fixed at 96x96 pixels. If we use this system to digitize checkerboard patterns Under-sampling 2/20/

39 Aliasing in Images: Example Re-sampling 2/20/

40 Aliasing in Images: Example Re-sampling 2/20/
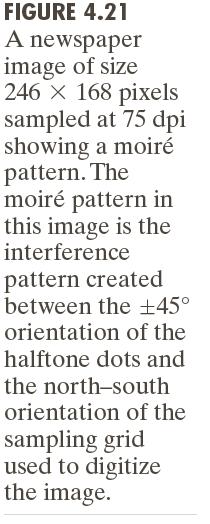
41 Moiré patterns Moiré patterns are often an undesired artifact of images produced by various digital imaging and computer graphics techniques e. g., when scanning a halftone picture or ray tracing a checkered plane. This cause of moiré is a special case of aliasing, due to under-sampling a fine regular pattern 2/20/

42 Moiré patterns 2/20/

43 Moiré patterns A moiré pattern formed by incorrectly downsampling the former image 2/20/


44 Moire Pattern 2/20/

45 2/20/


46 2/20/
47 2-D Discrete Fourier Transform and Its Inverse DFT: M 1N 1 F( µν, ) = f( xye, ) x= 0 y= 0 j2 π ( µ xm / + νyn / ) µ = 0,1,2,..., M 1; ν = 0,1,2,..., N 1; f( xy, ) is a digital image of size M N. IDFT: M 1N 1 1 f( xy, ) = F( µν, ) e MN x= 0 y= 0 j2 π ( µ xm / + νyn / ) 2/20/
48 Properties of the 2-D DFT relationships between spatial and frequency intervals Let T and Z denote the separations between samples, then the seperations between the corresponding discrete, frequency domain variables are given by µ = and ν = 1 M T 1 N Z 2/20/
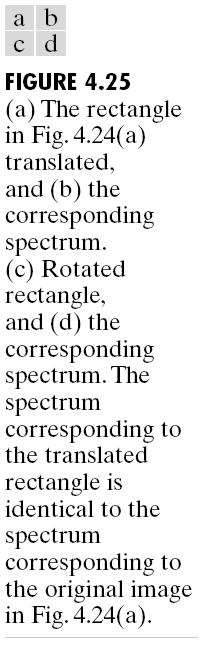
49 Properties of the 2-D DFT translation and rotation and j2 π ( µ 0xM / + ν0yn / ) (, ) (, ) f xye f( x- x, y- y ) F( µν, ) e 0 0 Fµ µ ν ν 0 0 j2 π ( µ x / M+ νy / N) 0 0 Using the polar coordinates x= rcos θ y=rsin θ µ = ωcos ϕ ν= ωsinϕ results in the following transform pair: f(, r θ+ θ) F( ωϕ, + θ) 0 0 2/20/
50 Properties of the 2-D DFT periodicity 2 D Fourier transform and its inverse are infinitely periodic F( µν, ) = F( µ + km, ν ) = F( µν, + k N) = F( µ + km, ν+ k N) f( x, y) = f( x+ k M, y) = f( x, y+ k N) = f( x+ k M, y+ k N) f xe µ µ j 2 π ( µ 0xM ( ) / ) F( ) x µ 0 = M /2, f( x)( 1) F( µ M /2) x+ y f( xy, )( 1) F( µ M/2, ν N/2) 0 2/20/

51 Properties of the 2-D DFT periodicity 2/20/

52 Properties of the 2-D DFT Symmetry 2/20/
53 Properties of the 2-D DFT Fourier Spectrum and Phase Angle 2-D DFT in polar form Fourier spectrum Fuv (, ) = Fuv (, ) e jφ ( uv, ) Fuv = R uv + I uv Power spectrum 2 2 (, ) (, ) (, ) 1/2 Puv = Fuv = R uv + I uv (, ) (, ) (, ) (, ) Phase angle Iuv (, ) φ(u,v)=arctan Ruv (, ) 2/20/


54 2/20/

55 2/20/
56 Example: Phase Angles 2/20/

57 Example: Phase Angles and The Reconstructed 2/20/
58 2-D Convolution Theorem 1-D convolution 2-D convolution M 1 f( x) hx ( ) = f( mhx ) ( m) m= 0 M 1N 1 f( xy, ) hxy (, ) = f( mnhx, ) ( my, n) m= 0 n= 0 x = 0,1,2,..., M 1; y = 0,1,2,..., N 1. f( xy, ) hxy (, ) FuvHuv (, ) (, ) f( xyhxy, ) (, ) Fuv (, ) Huv (, ) 2/20/
59 An Example of Convolution Mirroring h about the origin Translating the mirrored function by x Computing the sum for each x 2/20/

60 An Example of Convolution It causes the wraparoun d error It can be solved by appending zeros 2/20/
61 Zero Padding Consider two functions f(x) and h(x) composed of A and B samples, respectively Append zeros to both functions so that they have the same length, denoted by P, then wraparound is avoided by choosing P A+B-1 2/20/
62 Zero Padding Let f(x,y) and h(x,y) be two image arrays of sizes A B and C D pixels, respectively. Wraparound error in their convolution can be avoided by padding these functions with zeros f h p p ( xy, ) ( xy, ) f ( x, y) 0 x A-1 and 0 y B -1 = 0 A x P or B y Q h( x, y) 0 x C -1 and 0 y D -1 = 0 C x P or D y Q Here P A+ C 1; Q B+ D 1 2/20/
63 Summary 2/20/
64 Summary 2/20/
65 Summary 2/20/
66 Summary 2/20/
67 The Basic Filtering in the Frequency Domain Why is the spectrum at almost ±45 degree stronger than the spectrum at other directions? 2/20/
68 The Basic Filtering in the Frequency Domain Modifying the Fourier transform of an image Computing the inverse transform to obtain the processed result gxy 1 (, ) = I { HuvFuv (, ) (, )} Fuv (, ) is the DFT of the input image Huv (, ) is a filter function. 2/20/

69 The Basic Filtering in the Frequency Domain In a filter H(u,v) that is 0 at the center of the transform and 1 elsewhere, what s the output image? 2/20/

70 The Basic Filtering in the Frequency Domain 2/20/
71 Zero-Phase-Shift Filters gxy = I 1 (, ) { HuvFuv (, ) (, )} Fuv (, ) = Ruv (, ) + jiuv (, ) gxy (, ) =I HuvRuv (, ) (, ) + jhuviuv (, ) (, ) 1 [ ] Filters affect the real and imaginary parts equally, and thus no effect on the phase. These filters are called zero-phase-shift filters 2/20/


72 Examples: Nonzero-Phase-Shift Filters Even small Phase changes angle is in the phase angle Phase angle can is have dramatic multiplied (usually by undesirable) effects multiplied on the by filtered output /20/
73 Summary: Steps for Filtering in the Frequency Domain 1. Given an input image f(x,y) of size MxN, obtain the padding parameters P and Q. Typically, P = 2M and Q = 2N. 2. Form a padded image, f p (x,y) of size PxQ by appending the necessary number of zeros to f(x,y) 3. Multiply f p (x,y) by (-1) x+y to center its transform 4. Compute the DFT, F(u,v) of the image from step 3 5. Generate a real, symmetric filter function*, H(u,v), of size PxQ with center at coordinates (P/2, Q/2) *generate from a given spatial filter, we pad the spatial filter, multiply the expadded array by (-1) x+y, and compute the DFT of the result to obtain a centered H(u,v). 2/20/
74 Summary: Steps for Filtering in the Frequency Domain 6. Form the product G(u,v) = H(u,v)F(u,v) using array multiplication 7. Obtain the processed image { 1 [ ] } (, ) (, ) ( 1) x + g y p x y = real I G u v 8. Obtain the final processed result, g(x,y), by extracting the MxN region from the top, left quadrant of g p (x,y) 2/20/


75 An Example: Steps for Filtering in the Frequency Domain 2/20/
76 Correspondence Between Filtering in the Spatial and Frequency Domains (1) Let H(u) denote the 1-D frequency domain Gaussian filter H ( u) = Ae u /2σ The corresponding filter in the spatial domain h( x) = 2πσ x Ae π σ 1. Both components are Gaussian and real 2. The functions behave reciprocally 2/20/
77 Correspondence Between Filtering in the Spatial and Frequency Domains (2) Let Hu ( ) denote the difference of Gaussian filter /2 σ1 u /2σ2 H ( u) = Ae Be -u - with A B and σ σ 1 2 The corresponding filter in the spatial domain x π σ2 x h( x) = 2πσ Ae 2πσ Ae 2π σ High-pass filter or low-pass filter? 2/20/
")
78 Correspondence Between Filtering in the Spatial and Frequency Domains (3) 2/20/


79 Correspondence Between Filtering in the Spatial and Frequency Domains: Example 600x600 2/20/


80 Correspondence Between Filtering in the Spatial and Frequency Domains: Example 2/20/
81 Generate H(u,v) f h p p ( xy, ) f ( x, y) 0 x 599 and 0 y 599 = x 602 or 600 y 602 h( x, y) 0 x 2 and 0 y 2 ( xy, ) = 0 3 x 602 or 3 y 602 Here P A(600) + C(3) 1 = 602; Q B(600) + D(3) 1 = /20/
82 Generate H(u,v) x+ y 1. Multiply h( xy, ) by (-1) to center the frequency domain filter p 2. Compute the forward DFT of the result in (1) 3. Set the real part of the resulting DFT to 0 to account for parasitic real parts u+ v 4. Multiply the result by (-1), which is implicit when hxy (, ) was moved to the center of h( xy, ). p 2/20/
83 Image Smoothing Using Filter Domain Filters: ILPF Ideal Lowpass Filters (ILPF) 1 if Duv (, ) Huv (, ) = 0 if Duv (, ) > D D 0 0 D is a positive constant and Duv (, ) is the distance between a point ( uv, ) 0 in the frequency domain and the center of the frequency rectangle Duv (, ) = ( u P/ 2) + ( v Q/ 2) 2 2 1/2 2/20/
84 Image Smoothing Using Filter Domain Filters: ILPF 2/20/

85 ILPF Filtering Example 2/20/
86 ILPF Filtering Example 2/20/

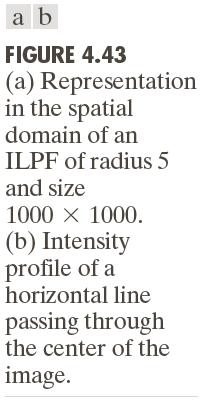
87 The Spatial Representation of ILPF 2/20/
 D 1 = 1 + (, )/ 0 [ Duv D] 0 2n n and 2/20/2014 89")
88 Image Smoothing Using Filter Domain Filters: BLPF Butterworth Lowpass Filters (BLPF) of order with cutoff frequency Huv (, ) D 1 = 1 + (, )/ 0 [ Duv D] 0 2n n and 2/20/

89 2/20/

90 The Spatial Representation of BLPF 2/20/
91 Image Smoothing Using Filter Domain Filters: GLPF Gaussian Lowpass Filters (GLPF) in two dimensions is given Huv (, ) = e D 2 2 ( uv, )/2σ By letting σ = D 0 Huv (, ) = e 2 2 (, )/2 0 D uv D 2/20/
92 Image Smoothing Using Filter Domain Filters: GLPF 2/20/

93 2/20/
 2/20/2014")
94 Examples of smoothing by GLPF (1) 2/20/
 2/20/2014")
95 Examples of smoothing by GLPF (2) 2/20/
 2/20/2014")
96 Examples of smoothing by GLPF (3) 2/20/
97 Image Sharpening Using Frequency Domain Filters A highpass filter is obtained from a given lowpass filter using H ( uv, ) = 1 H ( uv, ) HP LP A 2-D ideal highpass filter (IHPL) is defined as 0 if Duv (, ) D Huv (, ) = 1 if Duv (, ) > D 0 0 2/20/
98 Image Sharpening Using Frequency Domain Filters A 2-D Butterworth highpass filter (BHPL) is defined as Huv (, ) 1 = 1 + / (, ) [ D Duv] 2 0 n A 2-D Gaussian highpass filter (GHPL) is defined as Huv (, ) = 1 e 2 2 (, )/2 0 D uv D 2/20/
99 2/20/

100 The Spatial Representation of Highpass Filters 2/20/

101 Filtering Results by IHPF 2/20/

102 Filtering Results by BHPF 2/20/

103 Filtering Results by GHPF 2/20/
")
104 Using Highpass Filtering and Threshold for Image Enhancement BHPF (order 4 with a cutoff frequency 50) 2/20/
105 The Laplacian in the Frequency Domain Huv = π u + v (, ) 4 ( ) Huv = u P + v Q (, ) 4 π ( / 2) ( / 2) ) = π D ( uv, ) The Laplacian image f( xy, ) =I HuvFuv (, ) (, ) 2 1 { } Enhancement is obtained gxy f xy c f xy c 2 (, ) = (, ) + (, ) = -1 2/20/
106 The Laplacian in the Frequency Domain The enhanced image gxy =I Fuv HuvFuv 1 (, ) (, ) (, ) (, ) 1 =I =I + { } {[ 1 Huv (, )] Fuv (, )} { 1 4 π D( uv, ) Fuv (, )} /20/


107 The Laplacian in the Frequency Domain 2/20/
108 Unsharp Masking, Highboost Filtering and High-Frequency-Emphasis Fitering g ( xy, ) = f( xy, ) f ( xy, ) mask Unsharp masking and highboost filtering gxy (, ) = f( xy, ) + k* g ( xy, ) LP f ( xy, ) = I H ( uvfuv, ) (, ) LP 1 [ ] LP mask [ LP ] [ ] { } gxy =I + k H uv Fuv 1 (, ) 1 * 1 (, ) (, ) 1 =I + { 1 k* H ( uv, ) Fuv (, )} HP 2/20/
109 Unsharp Masking, Highboost Filtering and High-Frequency-Emphasis Fitering {[ ] } gxy (, ) =I k+ k * H ( uv, ) Fuv (, ) k 0 and k HP 2/20/

110 Gaussian Filter D 0 =40 High-Frequency-Emphasis Filtering Gaussian Filter K1=0.5, k2=0.75 2/20/
111 Homomorphic Filtering f( xy, ) = ixyrxy (, ) (, ) [ f( xy, )] [ ixy (, )] [ rxy (, )] I I I =? zxy (, ) = ln f( xy, ) = ln ixy (, ) + ln rxy (, ) { zxy (, )} { ln f( xy, )} { ln ixy (, )} { ln rxy (, )} I =I =I +I Zuv (, ) = F( uv, ) + F( uv, ) i r 2/20/
112 Homomorphic Filtering Suv (, ) = HuvZuv (, ) (, ) sxy = HuvF (, ) ( uv, ) + HuvF (, ) ( uv, ) = I 1 (, ) (, ) { Suv} { HuvF (, ) i( uv, ) HuvF (, ) r( uv, )} { HuvF (, ) ( uv, )} { HuvF (, ) ( uv, )} 1 =I + =I +I 1 1 i = i'( xy, ) + r'( xy, ) i r r gxy e e e i xyr xy (, ) '(, ) '(, ) (, ) = sxy = i xy r xy = 0(, ) 0(, ) 2/20/
113 Homomorphic Filtering The illumination component of an image generally is characterized by slow spatial variations, while the reflectance component tends to vary abruptly These characteristics lead to associating the low frequencies of the Fourier transform of the logarithm of an image with illumination the high frequencies with reflectance. 2/20/

114 Homomorphic Filtering 2 2 c D ( uv, )/ D Huv (,) ( γ γ )1 e 0 = + γ H L L Attenuate the contribution made by illumination and amplify the contribution made by reflectance 2/20/


115 γ L Homomorphic Filtering γ H c = 1 D 0 = = = 80 2/20/

116 Homomorphic Filtering 2/20/
117 Selective Filtering Non-Selective Filters: operate over the entire frequency rectangle Selective Filters operate over some part, not entire frequency rectangle bandreject or bandpass: process specific bands notch filters: process small regions of the frequency rectangle 2/20/
118 Selective Filtering: Bandreject and Bandpass Filters H ( uv, ) = 1 H ( uv, ) BP BR 2/20/


119 Selective Filtering: Bandreject and Bandpass Filters 2/20/
120 Selective Filtering: Notch Filters Zero-phase-shift filters must be symmetric about the origin. A notch with center at (u 0, v 0 ) must have a corresponding notch at location (-u 0,-v 0 ). Notch reject filters are constructed as products of highpass filters whose centers have been translated to the centers of the notches. H ( uv, ) = H( uvh, ) ( uv, ) NR k k k = 1 where H( uv, ) and H ( uv, ) are highpass filters whose centers are k at ( u, v ) and (- u,- v ), respectively. k k k k -k Q 2/20/
121 Selective Filtering: Notch Filters H ( uv, ) = H( uvh, ) ( uv, ) NR k k k = 1 where H( uv, ) and H ( uv, ) are highpass filters whose centers are k at ( u, v ) and (- u,- v ), respectively. k k k k -k A Butterworth notch reject filter of order n H D( uv, ) = ( u M/2 u) + ( v N/2 v) 2 2 k k k D ( uv, ) = ( u M/2 + u) + ( v N/2 + v) Q ( uv, ) = [ D D uv] [ D D uv] NR 2n 2n k = k / k(, ) 1 + 0k / k(, ) 2 2 k k k 2/20/ /2 1/2


122 Examples: Notch Filters (1) A Butterworth notch reject filter D =3 and n=4 for all notch pairs 0 2/20/

")
123 Examples: Notch Filters (2) 2/20/


124 2/20/
Lecture # 06. Image Processing in Frequency Domain
 Digital Image Processing CP-7008 Lecture # 06 Image Processing in Frequency Domain Fall 2011 Outline Fourier Transform Relationship with Image Processing CP-7008: Digital Image Processing Lecture # 6 2
Digital Image Processing CP-7008 Lecture # 06 Image Processing in Frequency Domain Fall 2011 Outline Fourier Transform Relationship with Image Processing CP-7008: Digital Image Processing Lecture # 6 2
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 13 Oct 2 nd, 2018 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review f 0 0 0 1 0 0 0 0 w 1 2 3 2 8 Zero Padding 0 0 0 0 0 0 0 1 0 0 0 0
Digital Image Processing COSC 6380/4393 Lecture 13 Oct 2 nd, 2018 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review f 0 0 0 1 0 0 0 0 w 1 2 3 2 8 Zero Padding 0 0 0 0 0 0 0 1 0 0 0 0
Convolution Spatial Aliasing Frequency domain filtering fundamentals Applications Image smoothing Image sharpening
 Frequency Domain Filtering Correspondence between Spatial and Frequency Filtering Fourier Transform Brief Introduction Sampling Theory 2 D Discrete Fourier Transform Convolution Spatial Aliasing Frequency
Frequency Domain Filtering Correspondence between Spatial and Frequency Filtering Fourier Transform Brief Introduction Sampling Theory 2 D Discrete Fourier Transform Convolution Spatial Aliasing Frequency
Digital Image Processing. Chapter 4: Image Enhancement in the Frequency Domain
 Digital Image Processing Chapter 4: Image Enhancement in the Frequency Domain Image Enhancement in Frequency Domain Objective: To understand the Fourier Transform and frequency domain and how to apply
Digital Image Processing Chapter 4: Image Enhancement in the Frequency Domain Image Enhancement in Frequency Domain Objective: To understand the Fourier Transform and frequency domain and how to apply
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Lecture 4 Filtering in the Frequency Domain. Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2016
 Lecture 4 Filtering in the Frequency Domain Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2016 Outline Background From Fourier series to Fourier transform Properties of the Fourier
Lecture 4 Filtering in the Frequency Domain Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2016 Outline Background From Fourier series to Fourier transform Properties of the Fourier
Computer Vision. Filtering in the Frequency Domain
 Computer Vision Filtering in the Frequency Domain Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 Introduction
Computer Vision Filtering in the Frequency Domain Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 Introduction
Image Enhancement in the frequency domain. Inel 5046 Prof. Vidya Manian
 Image Enhancement in the frequency domain Inel 5046 Prof. Vidya Manian Introduction 2D Fourier transform Basics of filtering in frequency domain Ideal low pass filter Gaussian low pass filter Ideal high
Image Enhancement in the frequency domain Inel 5046 Prof. Vidya Manian Introduction 2D Fourier transform Basics of filtering in frequency domain Ideal low pass filter Gaussian low pass filter Ideal high
Chapter 4 Image Enhancement in the Frequency Domain
 Chapter 4 Image Enhancement in the Frequency Domain Yinghua He School of Computer Science and Technology Tianjin University Background Introduction to the Fourier Transform and the Frequency Domain Smoothing
Chapter 4 Image Enhancement in the Frequency Domain Yinghua He School of Computer Science and Technology Tianjin University Background Introduction to the Fourier Transform and the Frequency Domain Smoothing
Digital Image Processing. Filtering in the Frequency Domain
 2D Linear Systems 2D Fourier Transform and its Properties The Basics of Filtering in Frequency Domain Image Smoothing Image Sharpening Selective Filtering Implementation Tips 1 General Definition: System
2D Linear Systems 2D Fourier Transform and its Properties The Basics of Filtering in Frequency Domain Image Smoothing Image Sharpening Selective Filtering Implementation Tips 1 General Definition: System
Chapter 4: Filtering in the Frequency Domain. Fourier Analysis R. C. Gonzalez & R. E. Woods
 Fourier Analysis 1992 2008 R. C. Gonzalez & R. E. Woods Properties of δ (t) and (x) δ : f t) δ ( t t ) dt = f ( ) f x) δ ( x x ) = f ( ) ( 0 t0 x= ( 0 x0 1992 2008 R. C. Gonzalez & R. E. Woods Sampling
Fourier Analysis 1992 2008 R. C. Gonzalez & R. E. Woods Properties of δ (t) and (x) δ : f t) δ ( t t ) dt = f ( ) f x) δ ( x x ) = f ( ) ( 0 t0 x= ( 0 x0 1992 2008 R. C. Gonzalez & R. E. Woods Sampling
Digital Image Processing. Image Enhancement: Filtering in the Frequency Domain
 Digital Image Processing Image Enhancement: Filtering in the Frequency Domain 2 Contents In this lecture we will look at image enhancement in the frequency domain Jean Baptiste Joseph Fourier The Fourier
Digital Image Processing Image Enhancement: Filtering in the Frequency Domain 2 Contents In this lecture we will look at image enhancement in the frequency domain Jean Baptiste Joseph Fourier The Fourier
IMAGE ENHANCEMENT: FILTERING IN THE FREQUENCY DOMAIN. Francesca Pizzorni Ferrarese
 IMAGE ENHANCEMENT: FILTERING IN THE FREQUENCY DOMAIN Francesca Pizzorni Ferrarese Contents In this lecture we will look at image enhancement in the frequency domain Jean Baptiste Joseph Fourier The Fourier
IMAGE ENHANCEMENT: FILTERING IN THE FREQUENCY DOMAIN Francesca Pizzorni Ferrarese Contents In this lecture we will look at image enhancement in the frequency domain Jean Baptiste Joseph Fourier The Fourier
Image Enhancement in the frequency domain. GZ Chapter 4
 Image Enhancement in the frequency domain GZ Chapter 4 Contents In this lecture we will look at image enhancement in the frequency domain The Fourier series & the Fourier transform Image Processing in
Image Enhancement in the frequency domain GZ Chapter 4 Contents In this lecture we will look at image enhancement in the frequency domain The Fourier series & the Fourier transform Image Processing in
Filtering in Frequency Domain
 Dr. Praveen Sankaran Department of ECE NIT Calicut February 4, 2013 Outline 1 2D DFT - Review 2 2D Sampling 2D DFT - Review 2D Impulse Train s [t, z] = m= n= δ [t m T, z n Z] (1) f (t, z) s [t, z] sampled
Dr. Praveen Sankaran Department of ECE NIT Calicut February 4, 2013 Outline 1 2D DFT - Review 2 2D Sampling 2D DFT - Review 2D Impulse Train s [t, z] = m= n= δ [t m T, z n Z] (1) f (t, z) s [t, z] sampled
Fourier series: Any periodic signals can be viewed as weighted sum. different frequencies. view frequency as an
 Image Enhancement in the Frequency Domain Fourier series: Any periodic signals can be viewed as weighted sum of sinusoidal signals with different frequencies Frequency Domain: view frequency as an independent
Image Enhancement in the Frequency Domain Fourier series: Any periodic signals can be viewed as weighted sum of sinusoidal signals with different frequencies Frequency Domain: view frequency as an independent
EECS490: Digital Image Processing. Lecture #11
 Lecture #11 Filtering Applications: OCR, scanning Highpass filters Laplacian in the frequency domain Image enhancement using highpass filters Homomorphic filters Bandreject/bandpass/notch filters Correlation
Lecture #11 Filtering Applications: OCR, scanning Highpass filters Laplacian in the frequency domain Image enhancement using highpass filters Homomorphic filters Bandreject/bandpass/notch filters Correlation
Today s lecture. The Fourier transform. Sampling, aliasing, interpolation The Fast Fourier Transform (FFT) algorithm
 algorithm") Today s lecture The Fourier transform What is it? What is it useful for? What are its properties? Sampling, aliasing, interpolation The Fast Fourier Transform (FFT) algorithm Jean Baptiste Joseph Fourier
Today s lecture The Fourier transform What is it? What is it useful for? What are its properties? Sampling, aliasing, interpolation The Fast Fourier Transform (FFT) algorithm Jean Baptiste Joseph Fourier
Fourier transform. Stefano Ferrari. Università degli Studi di Milano Methods for Image Processing. academic year
 Fourier transform Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 27 28 Function transforms Sometimes, operating on a class of functions
Fourier transform Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 27 28 Function transforms Sometimes, operating on a class of functions
Today s lecture. Local neighbourhood processing. The convolution. Removing uncorrelated noise from an image The Fourier transform
 Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
G52IVG, School of Computer Science, University of Nottingham
 Image Transforms Fourier Transform Basic idea 1 Image Transforms Fourier transform theory Let f(x) be a continuous function of a real variable x. The Fourier transform of f(x) is F ( u) f ( x)exp[ j2πux]
Image Transforms Fourier Transform Basic idea 1 Image Transforms Fourier transform theory Let f(x) be a continuous function of a real variable x. The Fourier transform of f(x) is F ( u) f ( x)exp[ j2πux]
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 ECE592-064 Digital mage Processing and ntroduction to Computer Vision Depart. of ECE, NC State University nstructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Thinking in the frequency domain Convolution
ECE592-064 Digital mage Processing and ntroduction to Computer Vision Depart. of ECE, NC State University nstructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Thinking in the frequency domain Convolution
Computer Vision & Digital Image Processing. Periodicity of the Fourier transform
 Computer Vision & Digital Image Processing Fourier Transform Properties, the Laplacian, Convolution and Correlation Dr. D. J. Jackson Lecture 9- Periodicity of the Fourier transform The discrete Fourier
Computer Vision & Digital Image Processing Fourier Transform Properties, the Laplacian, Convolution and Correlation Dr. D. J. Jackson Lecture 9- Periodicity of the Fourier transform The discrete Fourier
DISCRETE FOURIER TRANSFORM
 DD2423 Image Processing and Computer Vision DISCRETE FOURIER TRANSFORM Mårten Björkman Computer Vision and Active Perception School of Computer Science and Communication November 1, 2012 1 Terminology:
DD2423 Image Processing and Computer Vision DISCRETE FOURIER TRANSFORM Mårten Björkman Computer Vision and Active Perception School of Computer Science and Communication November 1, 2012 1 Terminology:
GBS765 Electron microscopy
 GBS765 Electron microscopy Lecture 1 Waves and Fourier transforms 10/14/14 9:05 AM Some fundamental concepts: Periodicity! If there is some a, for a function f(x), such that f(x) = f(x + na) then function
GBS765 Electron microscopy Lecture 1 Waves and Fourier transforms 10/14/14 9:05 AM Some fundamental concepts: Periodicity! If there is some a, for a function f(x), such that f(x) = f(x + na) then function
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
Empirical Mean and Variance!
 Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
Chapter 5 Frequency Domain Analysis of Systems
 Chapter 5 Frequency Domain Analysis of Systems CT, LTI Systems Consider the following CT LTI system: xt () ht () yt () Assumption: the impulse response h(t) is absolutely integrable, i.e., ht ( ) dt< (this
Chapter 5 Frequency Domain Analysis of Systems CT, LTI Systems Consider the following CT LTI system: xt () ht () yt () Assumption: the impulse response h(t) is absolutely integrable, i.e., ht ( ) dt< (this
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 05 Image Processing Basics 13/02/04 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 05 Image Processing Basics 13/02/04 http://www.ee.unlv.edu/~b1morris/ecg782/
Prof. Mohd Zaid Abdullah Room No:
 EEE 52/4 Advnced Digital Signal and Image Processing Tuesday, 00-300 hrs, Data Com. Lab. Friday, 0800-000 hrs, Data Com. Lab Prof. Mohd Zaid Abdullah Room No: 5 Email: mza@usm.my www.eng.usm.my Electromagnetic
EEE 52/4 Advnced Digital Signal and Image Processing Tuesday, 00-300 hrs, Data Com. Lab. Friday, 0800-000 hrs, Data Com. Lab Prof. Mohd Zaid Abdullah Room No: 5 Email: mza@usm.my www.eng.usm.my Electromagnetic
Chapter 5 Frequency Domain Analysis of Systems
 Chapter 5 Frequency Domain Analysis of Systems CT, LTI Systems Consider the following CT LTI system: xt () ht () yt () Assumption: the impulse response h(t) is absolutely integrable, i.e., ht ( ) dt< (this
Chapter 5 Frequency Domain Analysis of Systems CT, LTI Systems Consider the following CT LTI system: xt () ht () yt () Assumption: the impulse response h(t) is absolutely integrable, i.e., ht ( ) dt< (this
Discrete Fourier Transform
 Discrete Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013 Mårten Björkman
Discrete Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013 Mårten Björkman
Introduction to Computer Vision. 2D Linear Systems
 Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Fourier Transforms 1D
 Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
Contents. Signals as functions (1D, 2D)
") Fourier Transform The idea A signal can be interpreted as en electromagnetic wave. This consists of lights of different color, or frequency, that can be split apart usign an optic prism. Each component
Fourier Transform The idea A signal can be interpreted as en electromagnetic wave. This consists of lights of different color, or frequency, that can be split apart usign an optic prism. Each component
Digital Image Processing. Lecture 8 (Enhancement in the Frequency domain) Bu-Ali Sina University Computer Engineering Dep.
 Bu-Ali Sina University Computer Engineering Dep.") Digital Image Processing Lectre 8 Enhancement in the Freqenc domain B-Ali Sina Uniersit Compter Engineering Dep. Fall 009 Image Enhancement In The Freqenc Domain Otline Jean Baptiste Joseph Forier The
Digital Image Processing Lectre 8 Enhancement in the Freqenc domain B-Ali Sina Uniersit Compter Engineering Dep. Fall 009 Image Enhancement In The Freqenc Domain Otline Jean Baptiste Joseph Forier The
Filtering in the Frequency Domain
 Filtering in the Frequency Domain Dr. Praveen Sankaran Department of ECE NIT Calicut January 11, 2013 Outline 1 Preliminary Concepts 2 Signal A measurable phenomenon that changes over time or throughout
Filtering in the Frequency Domain Dr. Praveen Sankaran Department of ECE NIT Calicut January 11, 2013 Outline 1 Preliminary Concepts 2 Signal A measurable phenomenon that changes over time or throughout
Contents. Signals as functions (1D, 2D)
") Fourier Transform The idea A signal can be interpreted as en electromagnetic wave. This consists of lights of different color, or frequency, that can be split apart usign an optic prism. Each component
Fourier Transform The idea A signal can be interpreted as en electromagnetic wave. This consists of lights of different color, or frequency, that can be split apart usign an optic prism. Each component
Review: Continuous Fourier Transform
 Review: Continuous Fourier Transform Review: convolution x t h t = x τ h(t τ)dτ Convolution in time domain Derivation Convolution Property Interchange the order of integrals Let Convolution Property By
Review: Continuous Fourier Transform Review: convolution x t h t = x τ h(t τ)dτ Convolution in time domain Derivation Convolution Property Interchange the order of integrals Let Convolution Property By
CS 4495 Computer Vision. Frequency and Fourier Transforms. Aaron Bobick School of Interactive Computing. Frequency and Fourier Transform
 CS 4495 Computer Vision Frequency and Fourier Transforms Aaron Bobick School of Interactive Computing Administrivia Project 1 is (still) on line get started now! Readings for this week: FP Chapter 4 (which
CS 4495 Computer Vision Frequency and Fourier Transforms Aaron Bobick School of Interactive Computing Administrivia Project 1 is (still) on line get started now! Readings for this week: FP Chapter 4 (which
3. Lecture. Fourier Transformation Sampling
 3. Lecture Fourier Transformation Sampling Some slides taken from Digital Image Processing: An Algorithmic Introduction using Java, Wilhelm Burger and Mark James Burge Separability ² The 2D DFT can be
3. Lecture Fourier Transformation Sampling Some slides taken from Digital Image Processing: An Algorithmic Introduction using Java, Wilhelm Burger and Mark James Burge Separability ² The 2D DFT can be
Frequency2: Sampling and Aliasing
 CS 4495 Computer Vision Frequency2: Sampling and Aliasing Aaron Bobick School of Interactive Computing Administrivia Project 1 is due tonight. Submit what you have at the deadline. Next problem set stereo
CS 4495 Computer Vision Frequency2: Sampling and Aliasing Aaron Bobick School of Interactive Computing Administrivia Project 1 is due tonight. Submit what you have at the deadline. Next problem set stereo
Contents. Signals as functions (1D, 2D)
") Fourier Transform The idea A signal can be interpreted as en electromagnetic wave. This consists of lights of different color, or frequency, that can be split apart usign an optic prism. Each component
Fourier Transform The idea A signal can be interpreted as en electromagnetic wave. This consists of lights of different color, or frequency, that can be split apart usign an optic prism. Each component
Unit 7. Frequency Domain Processing
 Unit 7. Frequency Domain Processing 7.1 Frequency Content of One-Dimensional Signals Grayscale Variation across a Row. Consider the top row {f(0,n)} of an image {f(m,n)} where m = 0. Upon suppressing the
Unit 7. Frequency Domain Processing 7.1 Frequency Content of One-Dimensional Signals Grayscale Variation across a Row. Consider the top row {f(0,n)} of an image {f(m,n)} where m = 0. Upon suppressing the
COMP344 Digital Image Processing Fall 2007 Final Examination
 COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
Homework 4. May An LTI system has an input, x(t) and output y(t) related through the equation y(t) = t e (t t ) x(t 2)dt
 and output y(t) related through the equation y(t) = t e (t t ) x(t 2)dt") Homework 4 May 2017 1. An LTI system has an input, x(t) and output y(t) related through the equation y(t) = t e (t t ) x(t 2)dt Determine the impulse response of the system. Rewriting as y(t) = t e (t
Homework 4 May 2017 1. An LTI system has an input, x(t) and output y(t) related through the equation y(t) = t e (t t ) x(t 2)dt Determine the impulse response of the system. Rewriting as y(t) = t e (t
Continuous-time Fourier Methods
 ELEC 321-001 SIGNALS and SYSTEMS Continuous-time Fourier Methods Chapter 6 1 Representing a Signal The convolution method for finding the response of a system to an excitation takes advantage of the linearity
ELEC 321-001 SIGNALS and SYSTEMS Continuous-time Fourier Methods Chapter 6 1 Representing a Signal The convolution method for finding the response of a system to an excitation takes advantage of the linearity
SEISMIC WAVE PROPAGATION. Lecture 2: Fourier Analysis
 SEISMIC WAVE PROPAGATION Lecture 2: Fourier Analysis Fourier Series & Fourier Transforms Fourier Series Review of trigonometric identities Analysing the square wave Fourier Transform Transforms of some
SEISMIC WAVE PROPAGATION Lecture 2: Fourier Analysis Fourier Series & Fourier Transforms Fourier Series Review of trigonometric identities Analysing the square wave Fourier Transform Transforms of some
Chapter 4 Discrete Fourier Transform (DFT) And Signal Spectrum
 And Signal Spectrum") Chapter 4 Discrete Fourier Transform (DFT) And Signal Spectrum CEN352, DR. Nassim Ammour, King Saud University 1 Fourier Transform History Born 21 March 1768 ( Auxerre ). Died 16 May 1830 ( Paris ) French
Chapter 4 Discrete Fourier Transform (DFT) And Signal Spectrum CEN352, DR. Nassim Ammour, King Saud University 1 Fourier Transform History Born 21 March 1768 ( Auxerre ). Died 16 May 1830 ( Paris ) French
Image and Multidimensional Signal Processing
 Image and Mltidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Compter Science http://inside.mines.ed/~whoff/ Forier Transform Part : D discrete transforms 2 Overview
Image and Mltidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Compter Science http://inside.mines.ed/~whoff/ Forier Transform Part : D discrete transforms 2 Overview
BOOK CORRECTIONS, CLARIFICATIONS, AND CORRECTIONS TO PROBLEM SOLUTIONS
 Digital Image Processing, nd Ed. Gonzalez and Woods Prentice Hall 00 BOOK CORRECTIONS, CLARIFICATIONS, AND CORRECTIONS TO PROBLEM SOLUTIONS NOTE: Depending on the country in which you purchase the book,
Digital Image Processing, nd Ed. Gonzalez and Woods Prentice Hall 00 BOOK CORRECTIONS, CLARIFICATIONS, AND CORRECTIONS TO PROBLEM SOLUTIONS NOTE: Depending on the country in which you purchase the book,
Linear Operators and Fourier Transform
 Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Image Acquisition and Sampling Theory
 Image Acquisition and Sampling Theory Electromagnetic Spectrum The wavelength required to see an object must be the same size of smaller than the object 2 Image Sensors 3 Sensor Strips 4 Digital Image
Image Acquisition and Sampling Theory Electromagnetic Spectrum The wavelength required to see an object must be the same size of smaller than the object 2 Image Sensors 3 Sensor Strips 4 Digital Image
Discrete-Time Fourier Transform
 C H A P T E R 7 Discrete-Time Fourier Transform In Chapter 3 and Appendix C, we showed that interesting continuous-time waveforms x(t) can be synthesized by summing sinusoids, or complex exponential signals,
C H A P T E R 7 Discrete-Time Fourier Transform In Chapter 3 and Appendix C, we showed that interesting continuous-time waveforms x(t) can be synthesized by summing sinusoids, or complex exponential signals,
Discrete-time Signals and Systems in
 Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
9. Image filtering in the spatial and frequency domains
 Image Processing - Laboratory 9: Image filtering in the spatial and frequency domains 9. Image filtering in the spatial and frequency domains 9.. Introduction In this laboratory the convolution operator
Image Processing - Laboratory 9: Image filtering in the spatial and frequency domains 9. Image filtering in the spatial and frequency domains 9.. Introduction In this laboratory the convolution operator
2D Discrete Fourier Transform (DFT)
") 2D Discrete Fourier Transform (DFT) Outline Circular and linear convolutions 2D DFT 2D DCT Properties Other formulations Examples 2 2D Discrete Fourier Transform Fourier transform of a 2D signal defined
2D Discrete Fourier Transform (DFT) Outline Circular and linear convolutions 2D DFT 2D DCT Properties Other formulations Examples 2 2D Discrete Fourier Transform Fourier transform of a 2D signal defined
Signal Processing COS 323
 Signal Processing COS 323 Digital Signals D: functions of space or time e.g., sound 2D: often functions of 2 spatial dimensions e.g. images 3D: functions of 3 spatial dimensions CAT, MRI scans or 2 space,
Signal Processing COS 323 Digital Signals D: functions of space or time e.g., sound 2D: often functions of 2 spatial dimensions e.g. images 3D: functions of 3 spatial dimensions CAT, MRI scans or 2 space,
MIT 2.71/2.710 Optics 10/31/05 wk9-a-1. The spatial frequency domain
 10/31/05 wk9-a-1 The spatial frequency domain Recall: plane wave propagation x path delay increases linearly with x λ z=0 θ E 0 x exp i2π sinθ + λ z i2π cosθ λ z plane of observation 10/31/05 wk9-a-2 Spatial
10/31/05 wk9-a-1 The spatial frequency domain Recall: plane wave propagation x path delay increases linearly with x λ z=0 θ E 0 x exp i2π sinθ + λ z i2π cosθ λ z plane of observation 10/31/05 wk9-a-2 Spatial
Chap 4. Sampling of Continuous-Time Signals
 Digital Signal Processing Chap 4. Sampling of Continuous-Time Signals Chang-Su Kim Digital Processing of Continuous-Time Signals Digital processing of a CT signal involves three basic steps 1. Conversion
Digital Signal Processing Chap 4. Sampling of Continuous-Time Signals Chang-Su Kim Digital Processing of Continuous-Time Signals Digital processing of a CT signal involves three basic steps 1. Conversion
Lecture 5. The Digital Fourier Transform. (Based, in part, on The Scientist and Engineer's Guide to Digital Signal Processing by Steven Smith)
") Lecture 5 The Digital Fourier Transform (Based, in part, on The Scientist and Engineer's Guide to Digital Signal Processing by Steven Smith) 1 -. 8 -. 6 -. 4 -. 2-1 -. 8 -. 6 -. 4 -. 2 -. 2. 4. 6. 8 1
Lecture 5 The Digital Fourier Transform (Based, in part, on The Scientist and Engineer's Guide to Digital Signal Processing by Steven Smith) 1 -. 8 -. 6 -. 4 -. 2-1 -. 8 -. 6 -. 4 -. 2 -. 2. 4. 6. 8 1
Fundamentals of the Discrete Fourier Transform
 Seminar presentation at the Politecnico di Milano, Como, November 12, 2012 Fundamentals of the Discrete Fourier Transform Michael G. Sideris sideris@ucalgary.ca Department of Geomatics Engineering University
Seminar presentation at the Politecnico di Milano, Como, November 12, 2012 Fundamentals of the Discrete Fourier Transform Michael G. Sideris sideris@ucalgary.ca Department of Geomatics Engineering University
2. Image Transforms. f (x)exp[ 2 jπ ux]dx (1) F(u)exp[2 jπ ux]du (2)
![2. Image Transforms. f (x)exp[ 2 jπ ux]dx (1) F(u)exp[2 jπ ux]du (2)](/thumbs/73/69504092.jpg "2. Image Transforms. f (x)exp[ 2 jπ ux]dx (1) F(u)exp[2 jπ ux]du (2)") 2. Image Transforms Transform theory plays a key role in image processing and will be applied during image enhancement, restoration etc. as described later in the course. Many image processing algorithms
2. Image Transforms Transform theory plays a key role in image processing and will be applied during image enhancement, restoration etc. as described later in the course. Many image processing algorithms
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Topic 3: Fourier Series (FS)
") ELEC264: Signals And Systems Topic 3: Fourier Series (FS) o o o o Introduction to frequency analysis of signals CT FS Fourier series of CT periodic signals Signal Symmetry and CT Fourier Series Properties
ELEC264: Signals And Systems Topic 3: Fourier Series (FS) o o o o Introduction to frequency analysis of signals CT FS Fourier series of CT periodic signals Signal Symmetry and CT Fourier Series Properties
Tutorial Sheet #2 discrete vs. continuous functions, periodicity, sampling
 2.39 utorial Sheet #2 discrete vs. continuous functions, periodicity, sampling We will encounter two classes of signals in this class, continuous-signals and discrete-signals. he distinct mathematical
2.39 utorial Sheet #2 discrete vs. continuous functions, periodicity, sampling We will encounter two classes of signals in this class, continuous-signals and discrete-signals. he distinct mathematical
Reference Text: The evolution of Applied harmonics analysis by Elena Prestini
 Notes for July 14. Filtering in Frequency domain. Reference Text: The evolution of Applied harmonics analysis by Elena Prestini It all started with: Jean Baptist Joseph Fourier (1768-1830) Mathematician,
Notes for July 14. Filtering in Frequency domain. Reference Text: The evolution of Applied harmonics analysis by Elena Prestini It all started with: Jean Baptist Joseph Fourier (1768-1830) Mathematician,
Why does a lower resolution image still make sense to us? What do we lose? Image:
 2D FREQUENCY DOMAIN The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
2D FREQUENCY DOMAIN The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Wavelets and Multiresolution Processing
 Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Fourier Transform. sin(n# x)), where! = 2" / L and
), where! = 2 / L and") Fourier Transform Henning Stahlberg Introduction The tools provided by the Fourier transform are helpful for the analysis of 1D signals (time and frequency (or Fourier) domains), as well as 2D/3D signals
Fourier Transform Henning Stahlberg Introduction The tools provided by the Fourier transform are helpful for the analysis of 1D signals (time and frequency (or Fourier) domains), as well as 2D/3D signals
Chapter 16. Local Operations
 Chapter 16 Local Operations g[x, y] =O{f[x ± x, y ± y]} In many common image processing operations, the output pixel is a weighted combination of the gray values of pixels in the neighborhood of the input
Chapter 16 Local Operations g[x, y] =O{f[x ± x, y ± y]} In many common image processing operations, the output pixel is a weighted combination of the gray values of pixels in the neighborhood of the input
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Music 270a: Complex Exponentials and Spectrum Representation
 Music 270a: Complex Exponentials and Spectrum Representation Tamara Smyth, trsmyth@ucsd.edu Department of Music, University of California, San Diego (UCSD) October 24, 2016 1 Exponentials The exponential
Music 270a: Complex Exponentials and Spectrum Representation Tamara Smyth, trsmyth@ucsd.edu Department of Music, University of California, San Diego (UCSD) October 24, 2016 1 Exponentials The exponential
Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems
![Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems](/thumbs/74/71250091.jpg "Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems") Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems 1 Image as a sum of basic images What if every person s portrait photo could be expressed
Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems 1 Image as a sum of basic images What if every person s portrait photo could be expressed
The Discrete Fourier Transform
 In [ ]: cd matlab pwd The Discrete Fourier Transform Scope and Background Reading This session introduces the z-transform which is used in the analysis of discrete time systems. As for the Fourier and
In [ ]: cd matlab pwd The Discrete Fourier Transform Scope and Background Reading This session introduces the z-transform which is used in the analysis of discrete time systems. As for the Fourier and
Image Degradation Model (Linear/Additive)
") Image Degradation Model (Linear/Additive),,,,,,,, g x y h x y f x y x y G uv H uv F uv N uv 1 Source of noise Image acquisition (digitization) Image transmission Spatial properties of noise Statistical
Image Degradation Model (Linear/Additive),,,,,,,, g x y h x y f x y x y G uv H uv F uv N uv 1 Source of noise Image acquisition (digitization) Image transmission Spatial properties of noise Statistical
F(u) = f e(t)cos2πutdt + = f e(t)cos2πutdt i f o(t)sin2πutdt = F e(u) + if o(u).
 = f e(t)cos2πutdt + = f e(t)cos2πutdt i f o(t)sin2πutdt = F e(u) + if o(u).") The (Continuous) Fourier Transform Matrix Computations and Virtual Spaces Applications in Signal/Image Processing Niclas Börlin niclas.borlin@cs.umu.se Department of Computing Science, Umeå University,
The (Continuous) Fourier Transform Matrix Computations and Virtual Spaces Applications in Signal/Image Processing Niclas Börlin niclas.borlin@cs.umu.se Department of Computing Science, Umeå University,
Images have structure at various scales
 Images have structure at various scales Frequency Frequency of a signal is how fast it changes Reflects scale of structure A combination of frequencies 0.1 X + 0.3 X + 0.5 X = Fourier transform Can we
Images have structure at various scales Frequency Frequency of a signal is how fast it changes Reflects scale of structure A combination of frequencies 0.1 X + 0.3 X + 0.5 X = Fourier transform Can we
Multiresolution schemes
 Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione dei Segnali Multi-dimensionali e
Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione dei Segnali Multi-dimensionali e
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
1 Understanding Sampling
 1 Understanding Sampling Summary. In Part I, we consider the analysis of discrete-time signals. In Chapter 1, we consider how discretizing a signal affects the signal s Fourier transform. We derive the
1 Understanding Sampling Summary. In Part I, we consider the analysis of discrete-time signals. In Chapter 1, we consider how discretizing a signal affects the signal s Fourier transform. We derive the
Digital Image Processing
 Digital Image Processing Part 3: Fourier Transform and Filtering in the Frequency Domain AASS Learning Systems Lab, Dep. Teknik Room T109 (Fr, 11-1 o'clock) achim.lilienthal@oru.se Course Book Chapter
Digital Image Processing Part 3: Fourier Transform and Filtering in the Frequency Domain AASS Learning Systems Lab, Dep. Teknik Room T109 (Fr, 11-1 o'clock) achim.lilienthal@oru.se Course Book Chapter
Fourier Transform in Image Processing. CS/BIOEN 6640 U of Utah Guido Gerig (slides modified from Marcel Prastawa 2012)
") Fourier Transform in Image Processing CS/BIOEN 6640 U of Utah Guido Gerig (slides modified from Marcel Prastawa 2012) Basis Decomposition Write a function as a weighted sum of basis functions f ( x) wibi(
Fourier Transform in Image Processing CS/BIOEN 6640 U of Utah Guido Gerig (slides modified from Marcel Prastawa 2012) Basis Decomposition Write a function as a weighted sum of basis functions f ( x) wibi(
Multidimensional digital signal processing
 PSfrag replacements Two-dimensional discrete signals N 1 A 2-D discrete signal (also N called a sequence or array) is a function 2 defined over thex(n set 1 of, n 2 ordered ) pairs of integers: y(nx 1,
PSfrag replacements Two-dimensional discrete signals N 1 A 2-D discrete signal (also N called a sequence or array) is a function 2 defined over thex(n set 1 of, n 2 ordered ) pairs of integers: y(nx 1,
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Additional Pointers. Introduction to Computer Vision. Convolution. Area operations: Linear filtering
 Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
Digital Image Processing
 Digital Image Processing Image Transforms Unitary Transforms and the 2D Discrete Fourier Transform DR TANIA STATHAKI READER (ASSOCIATE PROFFESOR) IN SIGNAL PROCESSING IMPERIAL COLLEGE LONDON What is this
Digital Image Processing Image Transforms Unitary Transforms and the 2D Discrete Fourier Transform DR TANIA STATHAKI READER (ASSOCIATE PROFFESOR) IN SIGNAL PROCESSING IMPERIAL COLLEGE LONDON What is this
EE482: Digital Signal Processing Applications
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 05 IIR Design 14/03/04 http://www.ee.unlv.edu/~b1morris/ee482/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 05 IIR Design 14/03/04 http://www.ee.unlv.edu/~b1morris/ee482/
Bridge between continuous time and discrete time signals
 6 Sampling Bridge between continuous time and discrete time signals Sampling theorem complete representation of a continuous time signal by its samples Samplingandreconstruction implementcontinuous timesystems
6 Sampling Bridge between continuous time and discrete time signals Sampling theorem complete representation of a continuous time signal by its samples Samplingandreconstruction implementcontinuous timesystems
Multiresolution schemes
 Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Multi-dimensional signal processing Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione
Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Multi-dimensional signal processing Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione
Image Filtering, Edges and Image Representation
 Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Local enhancement. Local Enhancement. Local histogram equalized. Histogram equalized. Local Contrast Enhancement. Fig 3.23: Another example
 Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Sound & Vibration Magazine March, Fundamentals of the Discrete Fourier Transform
 Fundamentals of the Discrete Fourier Transform Mark H. Richardson Hewlett Packard Corporation Santa Clara, California The Fourier transform is a mathematical procedure that was discovered by a French mathematician
Fundamentals of the Discrete Fourier Transform Mark H. Richardson Hewlett Packard Corporation Santa Clara, California The Fourier transform is a mathematical procedure that was discovered by a French mathematician
6 The Fourier transform
 6 The Fourier transform In this presentation we assume that the reader is already familiar with the Fourier transform. This means that we will not make a complete overview of its properties and applications.
6 The Fourier transform In this presentation we assume that the reader is already familiar with the Fourier transform. This means that we will not make a complete overview of its properties and applications.
BME 50500: Image and Signal Processing in Biomedicine. Lecture 2: Discrete Fourier Transform CCNY
 1 Lucas Parra, CCNY BME 50500: Image and Signal Processing in Biomedicine Lecture 2: Discrete Fourier Transform Lucas C. Parra Biomedical Engineering Department CCNY http://bme.ccny.cuny.edu/faculty/parra/teaching/signal-and-image/
1 Lucas Parra, CCNY BME 50500: Image and Signal Processing in Biomedicine Lecture 2: Discrete Fourier Transform Lucas C. Parra Biomedical Engineering Department CCNY http://bme.ccny.cuny.edu/faculty/parra/teaching/signal-and-image/
Fourier Transform 2D
 Image Processing - Lesson 8 Fourier Transform 2D Discrete Fourier Transform - 2D Continues Fourier Transform - 2D Fourier Properties Convolution Theorem Eamples = + + + The 2D Discrete Fourier Transform
Image Processing - Lesson 8 Fourier Transform 2D Discrete Fourier Transform - 2D Continues Fourier Transform - 2D Fourier Properties Convolution Theorem Eamples = + + + The 2D Discrete Fourier Transform
Review of Analog Signal Analysis
 Review of Analog Signal Analysis Chapter Intended Learning Outcomes: (i) Review of Fourier series which is used to analyze continuous-time periodic signals (ii) Review of Fourier transform which is used
Review of Analog Signal Analysis Chapter Intended Learning Outcomes: (i) Review of Fourier series which is used to analyze continuous-time periodic signals (ii) Review of Fourier transform which is used
Digital Speech Processing Lecture 10. Short-Time Fourier Analysis Methods - Filter Bank Design
 Digital Speech Processing Lecture Short-Time Fourier Analysis Methods - Filter Bank Design Review of STFT j j ˆ m ˆ. X e x[ mw ] [ nˆ m] e nˆ function of nˆ looks like a time sequence function of ˆ looks
Digital Speech Processing Lecture Short-Time Fourier Analysis Methods - Filter Bank Design Review of STFT j j ˆ m ˆ. X e x[ mw ] [ nˆ m] e nˆ function of nˆ looks like a time sequence function of ˆ looks
IB Paper 6: Signal and Data Analysis
 IB Paper 6: Signal and Data Analysis Handout 5: Sampling Theory S Godsill Signal Processing and Communications Group, Engineering Department, Cambridge, UK Lent 2015 1 / 85 Sampling and Aliasing All of
IB Paper 6: Signal and Data Analysis Handout 5: Sampling Theory S Godsill Signal Processing and Communications Group, Engineering Department, Cambridge, UK Lent 2015 1 / 85 Sampling and Aliasing All of