ME451 Kinematics and Dynamics of Machine Systems
|
|
|
- Anthony Leonard
- 5 years ago
- Views:
Transcription
1 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 11, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Noise makes little good; good makes little noise. -- St François de Sales ( )
2 Before we get started 2 Last time (before the exam) Started working towards deriving the equations of motion of a rigid body Today Wrap up the Newton-Euler equations of motion for a rigid body Properties of the Centroid and Mass Moment of Inertia, Inertial Properties of Composite Bodies Project 1 Due date: Nov 18 at 11:59 PM Requires you to use simengine2d in conjunction with excavator example discussed in class Not trivial, requires some thinking HW due on Th includes ADAMS, MATLAB, pen-and-paper Probably the toughest assignment this semester
3 Midterm Exam 1 3 Highest score: 100 Average: 85 Standard Deviation: Problem A: KDOF question caused lots of problems Problem B: Two different ways of modeling the same mechanism Scores not as high as I was hoping People not reading what was asked (provided the equations as well) Problem 3: overall, good understanding of how to pose the set of position, velocity, and acceleration constraint equations People seem to have understood Newton-Raphson



4 D Alembert s Principle 4 Jean-Baptiste d Alembert ( )



5 Virtual Displacements in terms of Variations in Generalized Coordinates (1/2) 5

6 Virtual Displacements in terms of Variations in Generalized Coordinates (2/2) 6
7 6.1.2, Variational EOM with Centroidal Coordinates Newton-Euler Differential EOM

 is the point where the")
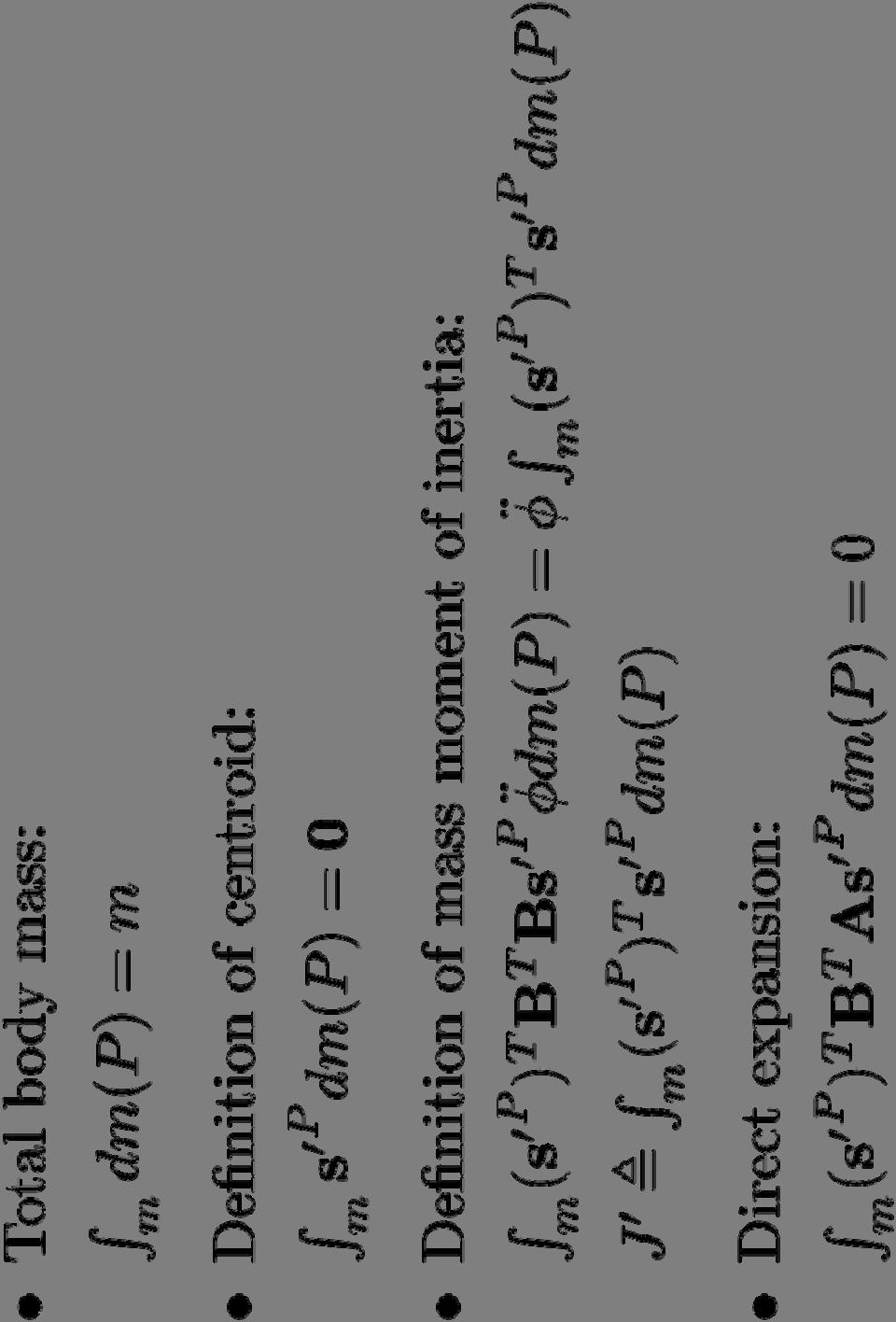
8 Centroidal Reference Frames 8 The variational EOM for a single rigid body can be significantly simplified if we pick a special LRF A centroidal reference frame is an LRF located at the center of mass How is such an LRF special? By definition of the center of mass (more on this later) is the point where the following integral vanishes:

9 Variational EOM with Centroidal LRF (1/3) 9
10 Variational EOM with Centroidal LRF (2/3) 10



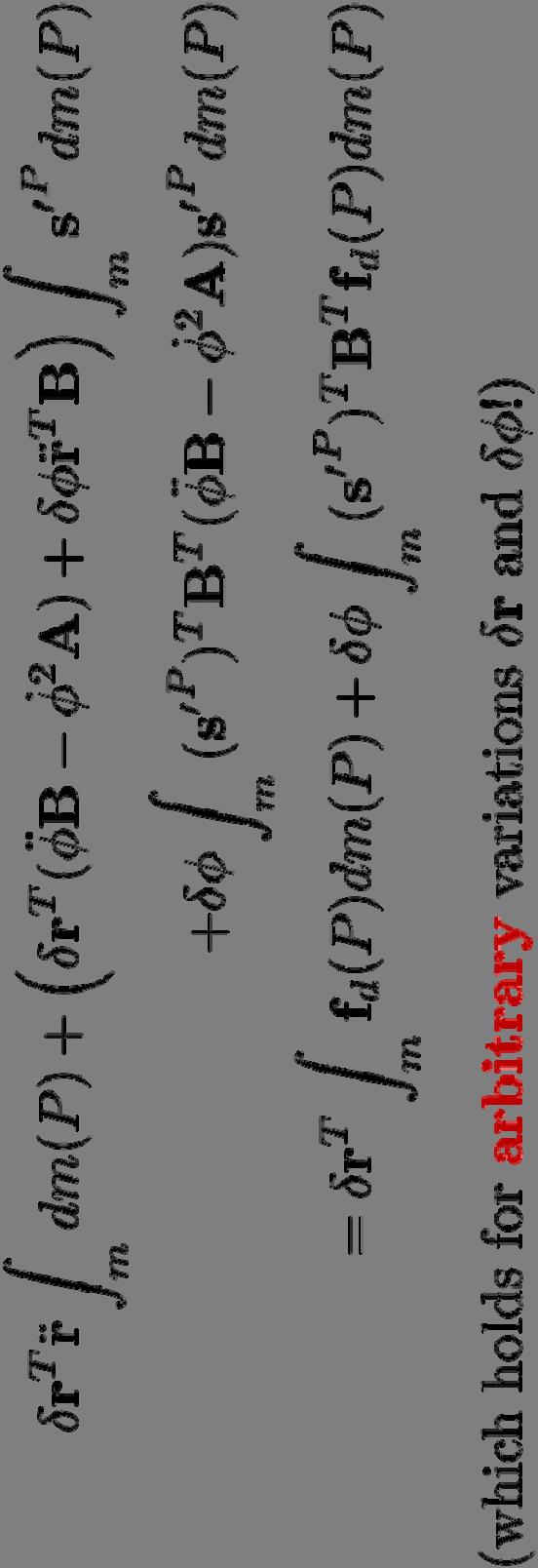
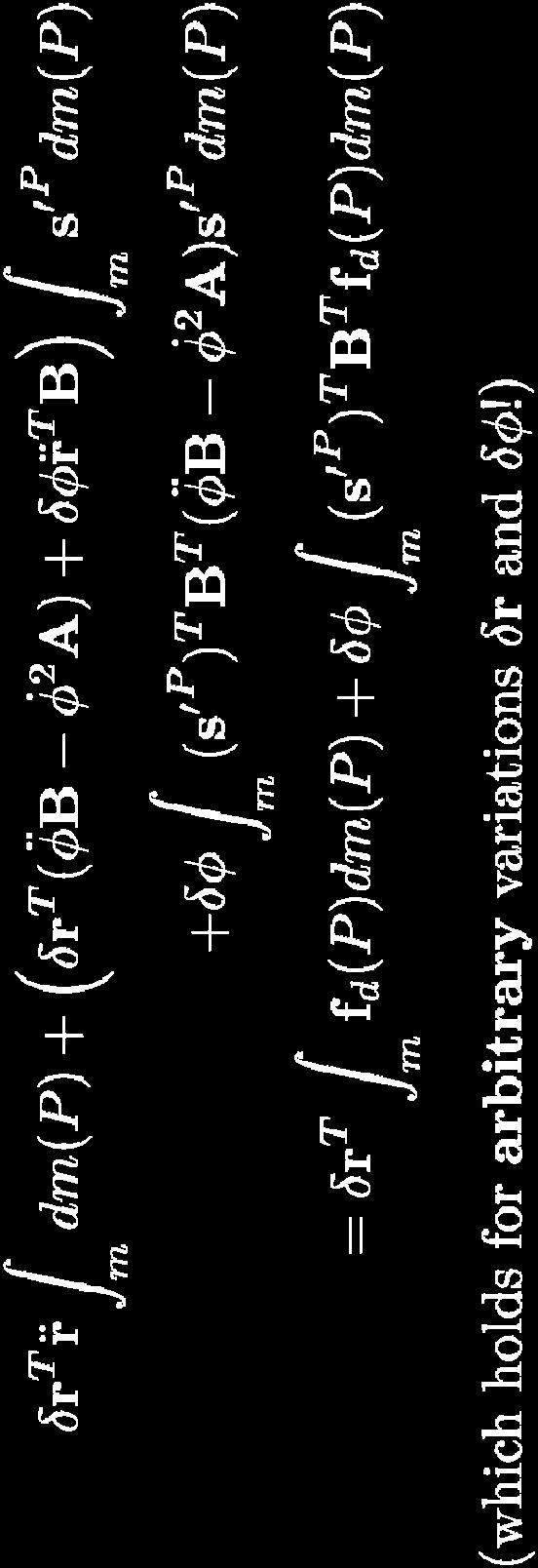
11 EOM for a Single Rigid Body: Newton-Euler Equations 11 The variational EOM of a rigid body with a centroidal body-fixed reference frame were obtained as: Assume all forces acting on the body have been accounted for. Since and are arbitrary, using the orthogonality theorem, we get: Important: The Newton-Euler equations are valid only if all force effects have been accounted for This includes both applied forces/torques and constraint forces/torques (from interactions with other bodies). Isaac Newton ( ) Leonhard Euler ( )

12 Newton-Euler EOM 12 Here s where we are: the EOM for a centroidal LRF (CLRF) Got these second order differential equations starting from first principles Newton s laws for a particle The rigid body assumption They tell us what the acceleration of the CLRF slapped on the body looks like Recall that this is what we were after: figuring out what the acceleration is Integrate once to get velocity Integrate once again to get positions (easier said than done)

13 Variational EOM with Centroidal LRF (3/3) 13
14 Roadmap: Check Progress 14 What have we done so far? Derived the variational and differential EOM for a single rigid body What is left? Properties of the mass moment of inertia Define a general strategy for including external forces in above Treatment of constraint forces Derive the variational and differential EOM for systems of constrained bodies
15 6.1.4, Properties of the Centroid and Mass Moment of Inertia Inertial Properties of Composite Bodies
 16 The")





16 Location of the Center of Mass (1/2) 16 The center of mass is the point on the body where the weighted relative position of the distributed mass sums to zero: Question: How can we calculate the location of the COM with respect to an LRF? where we have defined the total body mass as:
17 Location of the Center of Mass (2/2) 17 For a rigid body, the COM is fixed with respect to the body If the body has constant density, the COM coincides with the centroid of the body shape If the rigid body has a line of symmetry, then the COM is somewhere along that axis Notes: Here, symmetry axis means that both mass distribution and geometry are symmetric with respect to that axis If the rigid body has two axes of symmetry, the centroid is on each of them, and therefore is at their intersection
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 October 30, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Computer science education cannot
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 October 30, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Computer science education cannot
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 6, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: I have never let my schooling
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 6, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: I have never let my schooling
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.3.4, 6.6 November 25, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Marge, don't discourage
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.3.4, 6.6 November 25, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Marge, don't discourage
General Theoretical Concepts Related to Multibody Dynamics
 General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction September 2, 2010 Dan Negrut, 2010 ME451, UW-Madison Dan Negrut University of Wisconsin, Madison Before we get started Today: Discuss Syllabus
ME451 Kinematics and Dynamics of Machine Systems Introduction September 2, 2010 Dan Negrut, 2010 ME451, UW-Madison Dan Negrut University of Wisconsin, Madison Before we get started Today: Discuss Syllabus
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction September 4, 2014 Dan Negrut University of Wisconsin-Madison Quote of the day: "History will be kind to me for I intend to write it -Winston
ME451 Kinematics and Dynamics of Machine Systems Introduction September 4, 2014 Dan Negrut University of Wisconsin-Madison Quote of the day: "History will be kind to me for I intend to write it -Winston
Video 3.1 Vijay Kumar and Ani Hsieh
 Video 3.1 Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Dynamics of Robot Arms Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Lagrange s Equation of Motion Lagrangian Kinetic Energy Potential
Video 3.1 Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Dynamics of Robot Arms Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Lagrange s Equation of Motion Lagrangian Kinetic Energy Potential
Video 2.1a Vijay Kumar and Ani Hsieh
 Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics October 7, 2016 Dan Negrut University of Wisconsin-Madison Quotes of the Day [from Samuel] There will come a time when you believe everything is finished.
ME751 Advanced Computational Multibody Dynamics October 7, 2016 Dan Negrut University of Wisconsin-Madison Quotes of the Day [from Samuel] There will come a time when you believe everything is finished.
41514 Dynamics of Machinery
 41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Section 9.2 September 16, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day I only believe in statistics that I doctored myself. -- Sir Winston
ME751 Advanced Computational Multibody Dynamics Section 9.2 September 16, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day I only believe in statistics that I doctored myself. -- Sir Winston
Course Review. Physics 2210 Fall Semester 2014
 Course Review Physics 2210 Fall Semester 2014 Announcements Unit 21 Simple and Physical Pendula (Nov 24th) HW Due 11/25th as usual No new material Wednesday November 26th. In-class discussion of problems
Course Review Physics 2210 Fall Semester 2014 Announcements Unit 21 Simple and Physical Pendula (Nov 24th) HW Due 11/25th as usual No new material Wednesday November 26th. In-class discussion of problems
Physics 321 Theoretical Mechanics I. University of Arizona Fall 2004 Prof. Erich W. Varnes
 Physics 321 Theoretical Mechanics I University of Arizona Fall 2004 Prof. Erich W. Varnes Contacting me Administrative Matters I will hold office hours on Tuesday from 1-3 pm Room 420K in the PAS building
Physics 321 Theoretical Mechanics I University of Arizona Fall 2004 Prof. Erich W. Varnes Contacting me Administrative Matters I will hold office hours on Tuesday from 1-3 pm Room 420K in the PAS building
Advanced Dynamics. - Lecture 4 Lagrange Equations. Paolo Tiso Spring Semester 2017 ETH Zürich
 Advanced Dynamics - Lecture 4 Lagrange Equations Paolo Tiso Spring Semester 2017 ETH Zürich LECTURE OBJECTIVES 1. Derive the Lagrange equations of a system of particles; 2. Show that the equation of motion
Advanced Dynamics - Lecture 4 Lagrange Equations Paolo Tiso Spring Semester 2017 ETH Zürich LECTURE OBJECTIVES 1. Derive the Lagrange equations of a system of particles; 2. Show that the equation of motion
Classical Mechanics III (8.09) Fall 2014 Assignment 3
 Fall 2014 Assignment 3") Classical Mechanics III (8.09) Fall 2014 Assignment 3 Massachusetts Institute of Technology Physics Department Due September 29, 2014 September 22, 2014 6:00pm Announcements This week we continue our discussion
Classical Mechanics III (8.09) Fall 2014 Assignment 3 Massachusetts Institute of Technology Physics Department Due September 29, 2014 September 22, 2014 6:00pm Announcements This week we continue our discussion
Euler-Lagrange's equations in several variables
 Euler-Lagrange's equations in several variables So far we have studied one variable and its derivative Let us now consider L2:1 More:1 Taylor: 226-227 (This proof is slightly more general than Taylor's.)
Euler-Lagrange's equations in several variables So far we have studied one variable and its derivative Let us now consider L2:1 More:1 Taylor: 226-227 (This proof is slightly more general than Taylor's.)
Exam 3 December 1, 2010
 Exam 3 Instructions: You have 60 minutes to complete this exam. This is a closed-book, closed-notes exam. You are allowed to use a calculator during the exam. All work must be shown to receive credit.
Exam 3 Instructions: You have 60 minutes to complete this exam. This is a closed-book, closed-notes exam. You are allowed to use a calculator during the exam. All work must be shown to receive credit.
SPRING SEMESTER AE 262 DYNAMICS. (02) Dr. Yavuz YAMAN
 Dr. Yavuz YAMAN") 2012-2013 SPRING SEMESTER AE 262 DYNAMICS INSTRUCTOR (01) Dr. Yavuz YAMAN (02) Dr. Yavuz YAMAN TEXTBOOK Vector Mechanics for Engineers DYNAMICS F.P. Beer, E.R. Johnston Jr. and W.E. Clausen Eighth Edition
2012-2013 SPRING SEMESTER AE 262 DYNAMICS INSTRUCTOR (01) Dr. Yavuz YAMAN (02) Dr. Yavuz YAMAN TEXTBOOK Vector Mechanics for Engineers DYNAMICS F.P. Beer, E.R. Johnston Jr. and W.E. Clausen Eighth Edition
Rigid bodies - general theory
 Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Introduction MEAM 535. What is MEAM 535? Audience. Advanced topics in dynamics
 What is MEAM 535? Advanced topics in dynamics Audience Review of Newtonian mechanics MEAM 535 Introduction Analytical mechanics: Lagrangian and Hamiltonian Special topics: Stability of dynamical systems,
What is MEAM 535? Advanced topics in dynamics Audience Review of Newtonian mechanics MEAM 535 Introduction Analytical mechanics: Lagrangian and Hamiltonian Special topics: Stability of dynamical systems,
Chapter 4 Statics and dynamics of rigid bodies
 Chapter 4 Statics and dynamics of rigid bodies Bachelor Program in AUTOMATION ENGINEERING Prof. Rong-yong Zhao (zhaorongyong@tongji.edu.cn) First Semester,2014-2015 Content of chapter 4 4.1 Static equilibrium
Chapter 4 Statics and dynamics of rigid bodies Bachelor Program in AUTOMATION ENGINEERING Prof. Rong-yong Zhao (zhaorongyong@tongji.edu.cn) First Semester,2014-2015 Content of chapter 4 4.1 Static equilibrium
1/30. Rigid Body Rotations. Dave Frank
 . 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
. 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
Physical Dynamics (PHY-304)
") Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
Lecture 15 Strain and stress in beams
 Spring, 2019 ME 323 Mechanics of Materials Lecture 15 Strain and stress in beams Reading assignment: 6.1 6.2 News: Instructor: Prof. Marcial Gonzalez Last modified: 1/6/19 9:42:38 PM Beam theory (@ ME
Spring, 2019 ME 323 Mechanics of Materials Lecture 15 Strain and stress in beams Reading assignment: 6.1 6.2 News: Instructor: Prof. Marcial Gonzalez Last modified: 1/6/19 9:42:38 PM Beam theory (@ ME
STATICS & DYNAMICS. Engineering Mechanics. Gary L. Gray. Francesco Costanzo. Michael E. Plesha. University of Wisconsin-Madison
 Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION
 PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION Today s Objectives: Students will be able to: 1. Apply the three equations of motion for a rigid body in planar motion. 2. Analyze problems involving translational
PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION Today s Objectives: Students will be able to: 1. Apply the three equations of motion for a rigid body in planar motion. 2. Analyze problems involving translational
Lecture 38: Equations of Rigid-Body Motion
 Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay. Lecture - 1 Introduction
 Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1 Introduction Hello, I am Pradipta Banerji from the department of civil engineering,
Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1 Introduction Hello, I am Pradipta Banerji from the department of civil engineering,
Rotation. Kinematics Rigid Bodies Kinetic Energy. Torque Rolling. featuring moments of Inertia
 Rotation Kinematics Rigid Bodies Kinetic Energy featuring moments of Inertia Torque Rolling Angular Motion We think about rotation in the same basic way we do about linear motion How far does it go? How
Rotation Kinematics Rigid Bodies Kinetic Energy featuring moments of Inertia Torque Rolling Angular Motion We think about rotation in the same basic way we do about linear motion How far does it go? How
7. FORCE ANALYSIS. Fundamentals F C
 ME 352 ORE NLYSIS 7. ORE NLYSIS his chapter discusses some of the methodologies used to perform force analysis on mechanisms. he chapter begins with a review of some fundamentals of force analysis using
ME 352 ORE NLYSIS 7. ORE NLYSIS his chapter discusses some of the methodologies used to perform force analysis on mechanisms. he chapter begins with a review of some fundamentals of force analysis using
Probability and Samples. Sampling. Point Estimates
 Probability and Samples Sampling We want the results from our sample to be true for the population and not just the sample But our sample may or may not be representative of the population Sampling error
Probability and Samples Sampling We want the results from our sample to be true for the population and not just the sample But our sample may or may not be representative of the population Sampling error
Lecture 22: Harmonic Waves. Physics 2210 Fall Semester 2014
 Lecture 22: Harmonic Waves Physics 2210 Fall Semester 2014 Announcements Unit 21 Simple and Physical Pendula (Nov 24th ) HW Due 11/25 th as usual No new material Wednesday November 26th. In-class discussion
Lecture 22: Harmonic Waves Physics 2210 Fall Semester 2014 Announcements Unit 21 Simple and Physical Pendula (Nov 24th ) HW Due 11/25 th as usual No new material Wednesday November 26th. In-class discussion
Advanced Mechanics PHY 504 Fall Semester, 2016 (Revised 08/24/16) The Course will meet MWF in CP183, 9:00-9:50 a.m., beginning August 24, 2016.
 The Course will meet MWF in CP183, 9:00-9:50 a.m., beginning August 24, 2016.") Advanced Mechanics PHY 504 Fall Semester, 2016 (Revised 08/24/16) I. INSTRUCTOR/VENUE Professor Lance De Long Email: lance.delong@uky.edu Office: CP363 (257-4775) Labs: CP75, CP158 (257-8883) Office Hours:
Advanced Mechanics PHY 504 Fall Semester, 2016 (Revised 08/24/16) I. INSTRUCTOR/VENUE Professor Lance De Long Email: lance.delong@uky.edu Office: CP363 (257-4775) Labs: CP75, CP158 (257-8883) Office Hours:
PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION
 PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION Today s Objectives: Students will be able to: 1. Apply the three equations of motion for a rigid body in planar motion. 2. Analyze problems involving translational
PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION Today s Objectives: Students will be able to: 1. Apply the three equations of motion for a rigid body in planar motion. 2. Analyze problems involving translational
Definition: A "system" of equations is a set or collection of equations that you deal with all together at once.
 System of Equations Definition: A "system" of equations is a set or collection of equations that you deal with all together at once. There is both an x and y value that needs to be solved for Systems
System of Equations Definition: A "system" of equations is a set or collection of equations that you deal with all together at once. There is both an x and y value that needs to be solved for Systems
14. Rotational Kinematics and Moment of Inertia
 14. Rotational Kinematics and Moment of nertia A) Overview n this unit we will introduce rotational motion. n particular, we will introduce the angular kinematic variables that are used to describe the
14. Rotational Kinematics and Moment of nertia A) Overview n this unit we will introduce rotational motion. n particular, we will introduce the angular kinematic variables that are used to describe the
CHAPTER 1 INTRODUCTION
 CHAPTER 1 INTRODUCTION DEFINITION OF MECHANICS Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under the action of force systems.
CHAPTER 1 INTRODUCTION DEFINITION OF MECHANICS Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under the action of force systems.
FINAL EXAM GROUND RULES
 PHYSICS 507 Fall 2011 FINAL EXAM Room: ARC-108 Time: Wednesday, December 21, 10am-1pm GROUND RULES There are four problems based on the above-listed material. Closed book Closed notes Partial credit will
PHYSICS 507 Fall 2011 FINAL EXAM Room: ARC-108 Time: Wednesday, December 21, 10am-1pm GROUND RULES There are four problems based on the above-listed material. Closed book Closed notes Partial credit will
Fall 2014: PHYSICS 170 GENERAL PHYSICS I
 Fall 2014: PHYSICS 170 GENERAL PHYSICS I MTWF 9:30-10:20 am (Section 1) WAT 420 Instructor: Milincic Radovan (milincic@hawaii.edu) Office hours (tentative): MW 10:25 11:30 PSB 204 Course description: This
Fall 2014: PHYSICS 170 GENERAL PHYSICS I MTWF 9:30-10:20 am (Section 1) WAT 420 Instructor: Milincic Radovan (milincic@hawaii.edu) Office hours (tentative): MW 10:25 11:30 PSB 204 Course description: This
Lecture 38: Equations of Rigid-Body Motion
 Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Cam-Follower Constraints 3.3 Driving Constraints 3.5 October 11, 2011 Dan Negrut, 2011 ME451, UW-Madison "Computers are useless. They can only give you
ME451 Kinematics and Dynamics of Machine Systems Cam-Follower Constraints 3.3 Driving Constraints 3.5 October 11, 2011 Dan Negrut, 2011 ME451, UW-Madison "Computers are useless. They can only give you
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Euler-Lagrange formulation) Dimitar Dimitrov Örebro University June 16, 2012 Main points covered Euler-Lagrange formulation manipulator inertia matrix
Multibody simulation Dynamics of a multibody system (Euler-Lagrange formulation) Dimitar Dimitrov Örebro University June 16, 2012 Main points covered Euler-Lagrange formulation manipulator inertia matrix
Exam 3 April 16, 2014
 Exam 3 Instructions: You have 60 minutes to complete this exam. This is a closed-book, closed-notes exam. You are allowed to use a calculator during the exam. Usage of mobile phones and other electronic
Exam 3 Instructions: You have 60 minutes to complete this exam. This is a closed-book, closed-notes exam. You are allowed to use a calculator during the exam. Usage of mobile phones and other electronic
Contents. Dynamics and control of mechanical systems. Focuses on
 Dnamics and control of mechanical sstems Date Da (/8) Da (3/8) Da 3 (5/8) Da 4 (7/8) Da 5 (9/8) Da 6 (/8) Content Review of the basics of mechanics. Kinematics of rigid bodies - coordinate transformation,
Dnamics and control of mechanical sstems Date Da (/8) Da (3/8) Da 3 (5/8) Da 4 (7/8) Da 5 (9/8) Da 6 (/8) Content Review of the basics of mechanics. Kinematics of rigid bodies - coordinate transformation,
Course syllabus Engineering Mechanics - Dynamics
 Course syllabus Engineering Mechanics - Dynamics COURSE DETAILS Type of study programme Study programme Course title Course code ECTS (Number of credits allocated) Course status Year of study Course Web
Course syllabus Engineering Mechanics - Dynamics COURSE DETAILS Type of study programme Study programme Course title Course code ECTS (Number of credits allocated) Course status Year of study Course Web
Physics 351 Wednesday, April 4, 2018
 Physics 351 Wednesday, April 4, 2018 Pick up worksheet (!) on your way in. HW10 due this Friday. I tried (!) to make it short. For HW help, Bill is in DRL 3N6 Wed 4 7pm. Grace is in DRL 2C2 Thu 5:30 8:30pm.
Physics 351 Wednesday, April 4, 2018 Pick up worksheet (!) on your way in. HW10 due this Friday. I tried (!) to make it short. For HW help, Bill is in DRL 3N6 Wed 4 7pm. Grace is in DRL 2C2 Thu 5:30 8:30pm.
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
Physics 351 Wednesday, March 1, 2017
 Physics 351 Wednesday, March 1, 2017 HW7 due this Friday. Over spring break, you ll read 10.1 10.7 of Ch 10 (rigid body rotation). A copy of this Ch 10 is on Canvas so that you don t need to take your
Physics 351 Wednesday, March 1, 2017 HW7 due this Friday. Over spring break, you ll read 10.1 10.7 of Ch 10 (rigid body rotation). A copy of this Ch 10 is on Canvas so that you don t need to take your
INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad
 Dundigal, Hyderabad") INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 043 AERONAUTICAL ENGINEERING DEFINITIONS AND TERMINOLOGY Course Name : ENGINEERING MECHANICS Course Code : AAEB01 Program :
INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 043 AERONAUTICAL ENGINEERING DEFINITIONS AND TERMINOLOGY Course Name : ENGINEERING MECHANICS Course Code : AAEB01 Program :
CEE 271: Applied Mechanics II, Dynamics Lecture 28: Ch.17, Sec.2 3
 1 / 20 CEE 271: Applied Mechanics II, Dynamics Lecture 28: Ch.17, Sec.2 3 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Monday, November 1, 2011 2 / 20 PLANAR KINETIC
1 / 20 CEE 271: Applied Mechanics II, Dynamics Lecture 28: Ch.17, Sec.2 3 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Monday, November 1, 2011 2 / 20 PLANAR KINETIC
MITOCW 17. Practice Finding EOM Using Lagrange Equations
 MITOCW 17. Practice Finding EOM Using Lagrange Equations The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational
MITOCW 17. Practice Finding EOM Using Lagrange Equations The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational
Lecture AC-1. Aircraft Dynamics. Copy right 2003 by Jon at h an H ow
 Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Structural Dynamics Lecture 4. Outline of Lecture 4. Multi-Degree-of-Freedom Systems. Formulation of Equations of Motions. Undamped Eigenvibrations.
 Outline of Multi-Degree-of-Freedom Systems Formulation of Equations of Motions. Newton s 2 nd Law Applied to Free Masses. D Alembert s Principle. Basic Equations of Motion for Forced Vibrations of Linear
Outline of Multi-Degree-of-Freedom Systems Formulation of Equations of Motions. Newton s 2 nd Law Applied to Free Masses. D Alembert s Principle. Basic Equations of Motion for Forced Vibrations of Linear
Rolling with slipping experiment Virtual Laboratory Guide
 Rolling with slipping experiment Virtual Laboratory Guide Nora L. Maidana, Monaliza da Fonseca, Suelen F. Barros and Vito R. Vanin April 10, 2015 We recorded the motion of a ring rolling and slipping in
Rolling with slipping experiment Virtual Laboratory Guide Nora L. Maidana, Monaliza da Fonseca, Suelen F. Barros and Vito R. Vanin April 10, 2015 We recorded the motion of a ring rolling and slipping in
STATICS Chapter 1 Introductory Concepts
 Contents Preface to Adapted Edition... (v) Preface to Third Edition... (vii) List of Symbols and Abbreviations... (xi) PART - I STATICS Chapter 1 Introductory Concepts 1-1 Scope of Mechanics... 1 1-2 Preview
Contents Preface to Adapted Edition... (v) Preface to Third Edition... (vii) List of Symbols and Abbreviations... (xi) PART - I STATICS Chapter 1 Introductory Concepts 1-1 Scope of Mechanics... 1 1-2 Preview
For a rigid body that is constrained to rotate about a fixed axis, the gravitational torque about the axis is
 Experiment 14 The Physical Pendulum The period of oscillation of a physical pendulum is found to a high degree of accuracy by two methods: theory and experiment. The values are then compared. Theory For
Experiment 14 The Physical Pendulum The period of oscillation of a physical pendulum is found to a high degree of accuracy by two methods: theory and experiment. The values are then compared. Theory For
Fluid Mechanics Prof. S. K. Som Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Fluid Mechanics Prof. S. K. Som Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 15 Conservation Equations in Fluid Flow Part III Good afternoon. I welcome you all
Fluid Mechanics Prof. S. K. Som Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 15 Conservation Equations in Fluid Flow Part III Good afternoon. I welcome you all
Two Hanging Masses. ) by considering just the forces that act on it. Use Newton's 2nd law while
 by considering just the forces that act on it. Use Newton's 2nd law while") Student View Summary View Diagnostics View Print View with Answers Edit Assignment Settings per Student Exam 2 - Forces [ Print ] Due: 11:59pm on Tuesday, November 1, 2011 Note: To underst how points are
Student View Summary View Diagnostics View Print View with Answers Edit Assignment Settings per Student Exam 2 - Forces [ Print ] Due: 11:59pm on Tuesday, November 1, 2011 Note: To underst how points are
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Lecture 9 - Rotational Dynamics
 Lecture 9 - Rotational Dynamics A Puzzle... Angular momentum is a 3D vector, and changing its direction produces a torque τ = dl. An important application in our daily lives is that bicycles don t fall
Lecture 9 - Rotational Dynamics A Puzzle... Angular momentum is a 3D vector, and changing its direction produces a torque τ = dl. An important application in our daily lives is that bicycles don t fall
Physics 2514 Lecture 2
 Physics 2514 Lecture 2 P. Gutierrez Department of Physics & Astronomy University of Oklahoma Physics 2514 p. 1/17 Clicker To be or not to be, that is the question, but what is the answer? Please test your
Physics 2514 Lecture 2 P. Gutierrez Department of Physics & Astronomy University of Oklahoma Physics 2514 p. 1/17 Clicker To be or not to be, that is the question, but what is the answer? Please test your
Approach based on Cartesian coordinates
 GraSMech course 2005-2006 Computer-aided analysis of rigid and flexible multibody systems Approach based on Cartesian coordinates Prof. O. Verlinden Faculté polytechnique de Mons Olivier.Verlinden@fpms.ac.be
GraSMech course 2005-2006 Computer-aided analysis of rigid and flexible multibody systems Approach based on Cartesian coordinates Prof. O. Verlinden Faculté polytechnique de Mons Olivier.Verlinden@fpms.ac.be
ENGR 3130: DYNAMICS University of Detroit Mercy Term I,
 ENGR 3130: DYNAMICS University of Detroit Mercy Term I, 2013-2014 Course Description: The application of kinematics and kinetics to particles and rigid bodies. The course considers fixed and moving reference
ENGR 3130: DYNAMICS University of Detroit Mercy Term I, 2013-2014 Course Description: The application of kinematics and kinetics to particles and rigid bodies. The course considers fixed and moving reference
Chapter 8- Rotational Motion
 Chapter 8- Rotational Motion Assignment 8 Textbook (Giancoli, 6 th edition), Chapter 7-8: Due on Thursday, November 13, 2008 - Problem 28 - page 189 of the textbook - Problem 40 - page 190 of the textbook
Chapter 8- Rotational Motion Assignment 8 Textbook (Giancoli, 6 th edition), Chapter 7-8: Due on Thursday, November 13, 2008 - Problem 28 - page 189 of the textbook - Problem 40 - page 190 of the textbook
(Refer Slide Time: 2:08 min)
") Applied Mechanics Prof. R. K. Mittal Department of Applied Mechanics Indian Institute of Technology, Delhi Lecture No. 11 Properties of Surfaces (Contd.) Today we will take up lecture eleven which is a
Applied Mechanics Prof. R. K. Mittal Department of Applied Mechanics Indian Institute of Technology, Delhi Lecture No. 11 Properties of Surfaces (Contd.) Today we will take up lecture eleven which is a
For problems on statics:
 Statics For problems on statics: - Write down the condition of force balance for the x-, y-, and z- components - The condition of torque balance must be added Idea 1 - Statics: We have to write down the
Statics For problems on statics: - Write down the condition of force balance for the x-, y-, and z- components - The condition of torque balance must be added Idea 1 - Statics: We have to write down the
PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION (Sections ) Today s Objectives: Students will be able to: a) Apply the three equations of
 Today s Objectives: Students will be able to: a) Apply the three equations of") PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION (Sections 17.2-17.3) Today s Objectives: Students will be able to: a) Apply the three equations of motion for a rigid body in planar motion. b) Analyze problems
PLANAR KINETIC EQUATIONS OF MOTION: TRANSLATION (Sections 17.2-17.3) Today s Objectives: Students will be able to: a) Apply the three equations of motion for a rigid body in planar motion. b) Analyze problems
B.Sc. (Semester - 5) Subject: Physics Course: US05CPHY01 Classical Mechanics
 Subject: Physics Course: US05CPHY01 Classical Mechanics") 1 B.Sc. (Semester - 5) Subject: Physics Course: US05CPHY01 Classical Mechanics Question Bank UNIT: I Multiple choice questions: (1) The gravitational force between two masses is (a) Repulsive (b) Attractive
1 B.Sc. (Semester - 5) Subject: Physics Course: US05CPHY01 Classical Mechanics Question Bank UNIT: I Multiple choice questions: (1) The gravitational force between two masses is (a) Repulsive (b) Attractive
Midterm 3 Thursday April 13th
 Welcome back to Physics 215 Today s agenda: Angular momentum Rolling without slipping Midterm Review Physics 215 Spring 2017 Lecture 12-2 1 Midterm 3 Thursday April 13th Material covered: Ch 9 Ch 12 Lectures
Welcome back to Physics 215 Today s agenda: Angular momentum Rolling without slipping Midterm Review Physics 215 Spring 2017 Lecture 12-2 1 Midterm 3 Thursday April 13th Material covered: Ch 9 Ch 12 Lectures
Lecture 4-1 Force, Mass, Newton's Laws Throughout this semester we have been talking about Classical Mechanics which studies motion of objects at
 Lecture 4-1 orce, Mass, Newton's Laws Throughout this semester we have been talking about Classical Mechanics which studies motion of objects at every-day scale. Classical mechanics can be subdivided into
Lecture 4-1 orce, Mass, Newton's Laws Throughout this semester we have been talking about Classical Mechanics which studies motion of objects at every-day scale. Classical mechanics can be subdivided into
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
(Refer Slide Time: 1:58 min)
") Applied Mechanics Prof. R. K. Mittal Department of Applied Mechanics Indian Institution of Technology, Delhi Lecture No. # 13 Moments and Products of Inertia (Contd.) Today s lecture is lecture thirteen
Applied Mechanics Prof. R. K. Mittal Department of Applied Mechanics Indian Institution of Technology, Delhi Lecture No. # 13 Moments and Products of Inertia (Contd.) Today s lecture is lecture thirteen
Torque and Rotation Lecture 7
 Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
HOUSTON COMMUNITY COLLEGE COURSE OUTLINE FOR Engineering Statics (ENGR 2301) Fall 2012 Class Number: 24432
 Fall 2012 Class Number: 24432") HOUSTON COMMUNITY COLLEGE COURSE OUTLINE FOR Engineering Statics (ENGR 2301) Fall 2012 Class Number: 24432 Time and Location 9:00 AM 01:00 PM, Fridays, HCC Northwest College, Alief Branch, Room Number
HOUSTON COMMUNITY COLLEGE COURSE OUTLINE FOR Engineering Statics (ENGR 2301) Fall 2012 Class Number: 24432 Time and Location 9:00 AM 01:00 PM, Fridays, HCC Northwest College, Alief Branch, Room Number
Physics 101: Lecture 15 Torque, F=ma for rotation, and Equilibrium
 Physics 101: Lecture 15 Torque, F=ma for rotation, and Equilibrium Strike (Day 10) Prelectures, checkpoints, lectures continue with no change. Take-home quizzes this week. See Elaine Schulte s email. HW
Physics 101: Lecture 15 Torque, F=ma for rotation, and Equilibrium Strike (Day 10) Prelectures, checkpoints, lectures continue with no change. Take-home quizzes this week. See Elaine Schulte s email. HW
Chapter 3 Numerical Methods
 Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
In most robotic applications the goal is to find a multi-body dynamics description formulated
 Chapter 3 Dynamics Mathematical models of a robot s dynamics provide a description of why things move when forces are generated in and applied on the system. They play an important role for both simulation
Chapter 3 Dynamics Mathematical models of a robot s dynamics provide a description of why things move when forces are generated in and applied on the system. They play an important role for both simulation
Physics 351, Spring 2018, Homework #9. Due at start of class, Friday, March 30, 2018
 Physics 351, Spring 218, Homework #9. Due at start of class, Friday, March 3, 218 Please write your name on the LAST PAGE of your homework submission, so that we don t notice whose paper we re grading
Physics 351, Spring 218, Homework #9. Due at start of class, Friday, March 3, 218 Please write your name on the LAST PAGE of your homework submission, so that we don t notice whose paper we re grading
Chapter 9- Static Equilibrium
 Chapter 9- Static Equilibrium Changes in Office-hours The following changes will take place until the end of the semester Office-hours: - Monday, 12:00-13:00h - Wednesday, 14:00-15:00h - Friday, 13:00-14:00h
Chapter 9- Static Equilibrium Changes in Office-hours The following changes will take place until the end of the semester Office-hours: - Monday, 12:00-13:00h - Wednesday, 14:00-15:00h - Friday, 13:00-14:00h
ME751 Advanced Computational Multibody Dynamics. September 14, 2016
 ME751 Advanced Computational Multibody Dynamics September 14, 2016 Quote of the Day My own business always bores me to death; I prefer other people's. -- Oscar Wilde 2 Looking Ahead, Friday Need to wrap
ME751 Advanced Computational Multibody Dynamics September 14, 2016 Quote of the Day My own business always bores me to death; I prefer other people's. -- Oscar Wilde 2 Looking Ahead, Friday Need to wrap
PHY131H1F - Class 20. Today: Today, Chapter 13: General Periodic Oscillations. Special case: Simple Harmonic Motion
 Today: Today, Chapter 13: General Periodic Oscillations Special case: Simple Harmonic Motion PHY131H1F - Class 20 Animation from http://www.uni-saarland.de/fak7/knorr/homepages/patrick/theorex/maplescripts/oscillations/forced_oscillations1.html
Today: Today, Chapter 13: General Periodic Oscillations Special case: Simple Harmonic Motion PHY131H1F - Class 20 Animation from http://www.uni-saarland.de/fak7/knorr/homepages/patrick/theorex/maplescripts/oscillations/forced_oscillations1.html
Announcements Monday, September 18
 Announcements Monday, September 18 WeBWorK 1.4, 1.5 are due on Wednesday at 11:59pm. The first midterm is on this Friday, September 22. Midterms happen during recitation. The exam covers through 1.5. About
Announcements Monday, September 18 WeBWorK 1.4, 1.5 are due on Wednesday at 11:59pm. The first midterm is on this Friday, September 22. Midterms happen during recitation. The exam covers through 1.5. About
Fundamental principles
 Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Physics 351 Wednesday, January 10, 2018
 Physics 351 Wednesday, January 10, 2018 Chapers 1 5 mostly review freshman physics, so we ll go through them very quickly in the first few days of class. Read Chapters 1+2 for Friday. Read Chapter 3 (momentum
Physics 351 Wednesday, January 10, 2018 Chapers 1 5 mostly review freshman physics, so we ll go through them very quickly in the first few days of class. Read Chapters 1+2 for Friday. Read Chapter 3 (momentum
Analytical Dynamics: Lagrange s Equation and its Application A Brief Introduction
 Analytical Dynamics: Lagrange s Equation and its Application A Brief Introduction D. S. Stutts, Ph.D. Associate Professor of Mechanical Engineering Missouri University of Science and Technology Rolla,
Analytical Dynamics: Lagrange s Equation and its Application A Brief Introduction D. S. Stutts, Ph.D. Associate Professor of Mechanical Engineering Missouri University of Science and Technology Rolla,
 2018 SPRING PHYS 8011 Classical mechanics I (as of Apr. 19/2018) The course syllabus is a general plan for the course; deviations announced to the class by the instructor may be necessary. A FRIENDLY REMINDER:
2018 SPRING PHYS 8011 Classical mechanics I (as of Apr. 19/2018) The course syllabus is a general plan for the course; deviations announced to the class by the instructor may be necessary. A FRIENDLY REMINDER:
Spatial Vector Algebra
 A Short Course on The Easy Way to do Rigid Body Dynamics Roy Featherstone Dept. Inormation Engineering, RSISE The Australian National University Spatial vector algebra is a concise vector notation or describing
A Short Course on The Easy Way to do Rigid Body Dynamics Roy Featherstone Dept. Inormation Engineering, RSISE The Australian National University Spatial vector algebra is a concise vector notation or describing
Hong Kong Institute of Vocational Education (Tsing Yi) Higher Diploma in Civil Engineering Structural Mechanics. Chapter 2 SECTION PROPERTIES
 Higher Diploma in Civil Engineering Structural Mechanics. Chapter 2 SECTION PROPERTIES") Section Properties Centroid The centroid of an area is the point about which the area could be balanced if it was supported from that point. The word is derived from the word center, and it can be though
Section Properties Centroid The centroid of an area is the point about which the area could be balanced if it was supported from that point. The word is derived from the word center, and it can be though
Modal Analysis: What it is and is not Gerrit Visser
 Modal Analysis: What it is and is not Gerrit Visser What is a Modal Analysis? What answers do we get out of it? How is it useful? What does it not tell us? In this article, we ll discuss where a modal
Modal Analysis: What it is and is not Gerrit Visser What is a Modal Analysis? What answers do we get out of it? How is it useful? What does it not tell us? In this article, we ll discuss where a modal
PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION
 PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION I. Moment of Inertia: Since a body has a definite size and shape, an applied nonconcurrent force system may cause the body to both translate and rotate.
PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION I. Moment of Inertia: Since a body has a definite size and shape, an applied nonconcurrent force system may cause the body to both translate and rotate.
Contents. Dynamics and control of mechanical systems. Focus on
 Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
SPRING 2005 Midterm Exam #1, Part A
 Physics 151 SPRING 2005 Midterm Exam #1, Part A Roster No.: Score: 17 pts. possible Exam time limit: 50 minutes. You may use a calculator and both sides of ONE sheet of notes, handwritten only. Closed
Physics 151 SPRING 2005 Midterm Exam #1, Part A Roster No.: Score: 17 pts. possible Exam time limit: 50 minutes. You may use a calculator and both sides of ONE sheet of notes, handwritten only. Closed
inertia of a body, principal axes of inertia, invariants of an inertia tensor, and inertia triangle inequalities are illustrated and discussed.
 Preface This book belongs to a series of three books written simultaneously (the remaining two are titled Classical Mechanics: Dynamics and Classical Mechanics: Applied MechanicsandMechatronics). This
Preface This book belongs to a series of three books written simultaneously (the remaining two are titled Classical Mechanics: Dynamics and Classical Mechanics: Applied MechanicsandMechatronics). This
16. Rotational Dynamics
 6. Rotational Dynamics A Overview In this unit we will address examples that combine both translational and rotational motion. We will find that we will need both Newton s second law and the rotational
6. Rotational Dynamics A Overview In this unit we will address examples that combine both translational and rotational motion. We will find that we will need both Newton s second law and the rotational
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik. Robot Dynamics. Dr.-Ing. John Nassour J.
 Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
MITOCW 18. Quiz Review From Optional Problem Set 8
 MITOCW 18. Quiz Review From Optional Problem Set 8 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational
MITOCW 18. Quiz Review From Optional Problem Set 8 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational
III. Work and Energy
 Rotation I. Kinematics - Angular analogs II. III. IV. Dynamics - Torque and Rotational Inertia Work and Energy Angular Momentum - Bodies and particles V. Elliptical Orbits The student will be able to:
Rotation I. Kinematics - Angular analogs II. III. IV. Dynamics - Torque and Rotational Inertia Work and Energy Angular Momentum - Bodies and particles V. Elliptical Orbits The student will be able to:
Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras
 Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture 08 Vectors in a Plane, Scalars & Pseudoscalers Let us continue today with
Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture 08 Vectors in a Plane, Scalars & Pseudoscalers Let us continue today with