16. Rotational Dynamics
|
|
|
- Stanley Boone
- 5 years ago
- Views:
Transcription
1 6. Rotational Dynamics A Overview In this unit we will address examples that combine both translational and rotational motion. We will find that we will need both Newton s second law and the rotational dynamics equation we developed in the last unit to completely determine the motions. We will also develop the equation that is the rotational analog of the center of mass equation. Namely, we will find that the change in the rotational kinetic energy is determined by the integral of the torque over the angular displacement. We will close by examining in detail the motion of a ball rolling without slipping down a ramp. B Example: Disk and String In the last unit we developed the vector equation that determines rotational dynamics, that the net torque on a system of particles about a given axis is equal to the product of the moment of inertia of the system about that axis and the angular acceleration. τ Net = Iα We will now apply this equation to a number of examples. We will start with the solid cylinder, mounted on a small frictionless shaft through its symmetry axis, as shown in Figure 6.. It has a massless string wrapped around its outer surface. The string is pulled with a force F causing the cylinder to turn. Our task is to determine the resulting angular acceleration of the disk. We will start by defining the system to be the disk and calculating the torque exerted on this system about the rotation axis. The torque is produced by the applied force F which always acts at a distance R from the axis. Furthermore, the direction of the force is always perpendicular to R, the vector from the axis to Figure 6. the point of application of the force. Therefore A force F is applied to a string wrapped the torque vector (RXF has magnitude equal to around a solid cylinder mounted on a the product of R and F and a direction, obtained frictionless shaft producing an angular from the right hand rule, that points along the acceleration of the cylinder about its axis. axis, to the right in the figure. R F = I α The direction of the angular acceleration must be the same as that of the torque. Consequently, since the disk was initially at rest, the disk rotates in the direction shown and its speed increases with time. Since we know the moment of inertia of a solid disk about its axis of symmetry, we can solve for the magnitude of the angular acceleration. I = MR F α = MR




2 C Combining Translational and Rotational Motion Figure 6. shows the disk from the last section with a weight added to the end of the string. When we release the weight, the weight falls, pulling the string and causing the disk to rotate. In this example, we must deal with both the translational motion of the weight and the rotational motion of the disk. We want to calculate the resulting linear and angular accelerations. How do we go about starting the calculation? To determine the motion of the weight, we will start by writing down Newton s second law. There are two forces acting on the weight: the tension force exerted by the string pointing up and the gravitational force exerted by the Earth pointing down. We will choose the positive y axis to point down here which will result in a positive linear acceleration. mg T = ma For the rotation of the disk, we have the same equation as before, with the applied force F replaced by the tension force T. RT = Iα We now have two equations and three unknowns: the tension and the linear and Figure 6. angular accelerations. We need another A a mass m is attached to a string which equation in order to solve the problem. The key is wrapped around a solid cylinder. As here is to realize that since the string does not the mass falls, the string unwinds, slip, the length of string that unwinds is equal to producing an angular acceleration of the the arc length through which the disk turns! cylinder about its axis. Therefore, we can use our result from the last unit that relates the linear acceleration of a point on the rim to the angular acceleration of the disk. a = Rα We now have three equations and three unknowns. All that is left to do is simply to solve these equations. For example, we can first replace the angular acceleration in the rotational equation by the ratio of the linear acceleration to the radius of the disk to obtain: a a RT = I T = I R R We can now add this equation to the Newton s second law equation for the weight in order to eliminate the tension. I mg = a m + R
3 We can now eliminate the moment of inertia by substituting in its value in terms of the mass and radius of the disk to obtain our result for the acceleration of the weight:. m ( m + M mg = a a = g m + M We see that the acceleration of the weight is less than g by a factor determined by the masses of the weight and the disk. We can now use this value for the linear acceleration to determine the tension in the string: M T = m( g a = mg M + m Here we see that the tension is less than the weight by another factor determined by the masses of the weight and the disk. D Work and Energy in Rotations We now want to look at the rotational dynamics equation in the context of energy. Recall that by integrating Newton s second law for a system of particles, we obtained the center of mass equation, namely that the total macroscopic work done on the system is equal to the change in the center of mass kinetic energy, calculated as if the system were a point particle having the total mass of the system and moving with the velocity of the center of mass. FNet dl = ( mv We can obtain an exactly analogous equation for rotational motion relative to the center of mass. The derivation follows closely the previous derivation of the center of mass equation. Namely, if we replace the angular acceleration (dω/ in the rotational equation by the product of ω and dω/d, dω d dω dω α = = ω d d we obtain an equation that relates the net torque about an axis passing through the center of mass to the rate of change of the angular velocity to the angular displacement. dω τ Net = I ω d If we now integrate this equation, we find the relationship we are looking for. τ Net ω d = I ω ωdω = I ω Namely, that the integral of the torque over the angular displacement is equal to the change in the rotational kinetic energy. This relationship is completely general and it will prove to be a powerful tool in solving rotational problems. This result is actually more familiar than it might seem. For example, if we evaluate the integral of the torque over the angular displacement for the rotating disk in the last section, we find that it is just equal to the work done by the tension force!
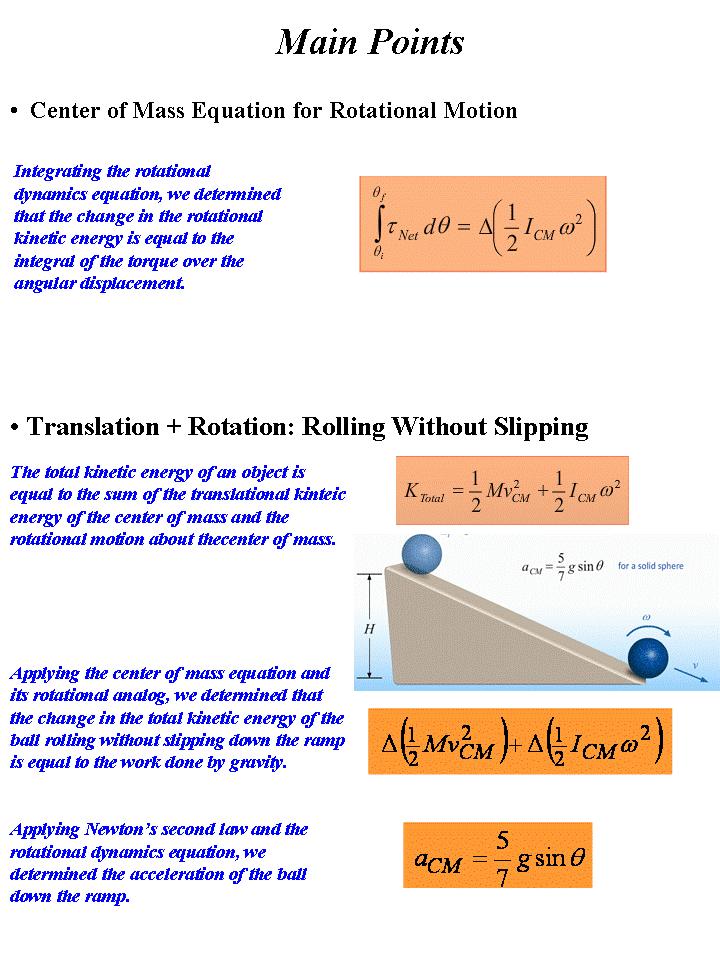
4 τ Net d = TR d = TR = TD Namely, the torque is constant and equal to the product of the tension and the radius of the cylinder, while the change in angular displacement as the weight falls through a distance D is just equal to D/R. Consequently we see that the integral of the net torque over the angular displacement is indeed equal to the product of the tension and the displacement of the weight which is just equal to the work done by the tension force! E Total inetic Energy of a Rolling Ball We have previously shown that the total kinetic energy of a solid object is just equal to the kinetic energy of the center of mass of the object plus the kinetic energy due to the rotation of the object around an axis through the center of mass. Total = M Totalv + I ω The first term is called the translational kinetic energy of the object; the second term is called the rotational kinetic energy. For cases in which the object is rolling without slipping, we can simplify this expression since the angular velocity and the center of mass velocity are related in a very simple way. Figure 6.3 shows the ball rolling through one revolution. As the ball rotates through an angular displacement, the center of mass moves through a distance equal to the arc Figure 6.3 A ball rolls without slipping through a distance that corresponds to one complete revolution of the ball about its center. The center of the mass has traveled a distance = v t = v (π/ω which is also equal to πr. Consequently, v = Rω. length which is equal to the product of R and. Therefore, we see that velocity of the center of mass is just equal the product of the angular velocity of the ball and its radius! We can now combine the kinetic energy of the center of mass with the kinetic energy of the rolling ball relative to the center of mass to obtain the total kinetic energy of the ball. Since the angular velocity of a ball that is rolling without slipping is simply
5 related to its translational velocity, we can rewrite the total kinetic energy totally in terms of the ball s translational velocity. v Total = M Totalv + I R Substituting in the moment of inertia for a solid sphere about its axis (/5 M Total R into this equation we obtain our final result: = Total 7 0 Note that the total kinetic energy is now bigger than what it would be if the ball were sliding with the same speed, since we need to account for the additional kinetic energy due to rotation. F Ball Rolling Down a Ramp We have just determined the total kinetic energy of a ball that rolls without slipping. We will now apply this result to the situation shown in Figure 6.4 where we see a solid sphere, released from rest at the top of a ramp, that then rolls without slipping to the bottom. Our task is to determine its speed when it reaches the bottom. M Total v Figure 6.4 A ball is released from rest at the top of a ramp and rolls without slipping to the bottom. The speed of the ball at the bottom can be determined from energy considerations. How do we go about solving this problem? We have certainly solved similar problems when the object was sliding, rather than rolling, down the ramp. In those cases, we applied the center of mass equation that says that the change in kinetic energy is equal to the macroscopic work done by all forces acting on the object. FNet dl = ( mv
6 The center of mass equation still applies here: the macroscopic work done on the ball is equal to the product of the displacement of the center of mass and the difference between the component of the weight down the ramp and the frictional force. F dl = ( mg sin f x mg sin f x = mv Net ( ( We cannot determine the final velocity of the center of mass from this equation, though, because we do not know the magnitude of the frictional force. We can determine the magnitude of the frictional force, however from a consideration of the rotational energy equation we have recently derived, namely that the product of the net torque and the angular displacement is equal to the change in the rotational kinetic energy. τ Net d = τ Net = ( I ω The net torque is just equal to the product of the frictional force and the radius of the ball. τ Net = f R We demonstrated in the last section that the product of the radius of the ball and the angular displacement is just equal to the displacement of the center of mass. Therefore, we can relate the change in the rotational kinetic energy of the ball to the product of the frictional force and the displacement of the center of mass. f x = ( I ω Combining this information with the center of mass equation, we obtain our final result: the change in the kinetic energy of the center of mass plus the change in the rotational kinetic energy relative to the center of mass is equal to the work done by the gravitational force. mv + ( I ω = mg sin x ( G Acceleration of a Rolling Ball In the last section we determined that the change in the kinetic energy of a ball rolling down a ramp was just equal to the work done by gravity. We would now like to determine the speed of the ball at any arbitrary time. In other words, we would like to calculate the acceleration of the ball. We will start by drawing the free-body diagram as shown in Figure 6.6 and then writing down Newton s second law that determines the motion of the center of mass. Mg sin f = Ma x We would like to solve this equation for the acceleration of the center of mass, but we don t know the magnitude of the frictional force! The only thing we know about the frictional force is that it is big enough to keep the ball from slipping. The key to finding the magnitude of this force is to realize that it is the frictional force that supplies the torque that produces the angular acceleration of the ball. Therefore, the other equation we need is the rotational equation about the center of mass of the ball.
7 f R = I α The magnitude of the torque is just equal to the product of the radius of the ball and the frictional force. The direction of the torque is into the page. Therefore, the angular Figure 6.5 The free-body diagram for a ball rolling without slipping down a ramp. acceleration of the ball is just equal to the magnitude of the torque divided by the moment of inertia about an axis passing through the center of mass of the ball. f R α = I Looking at the two equations we now have (Newton s second law for translations and rotations, we see we have three unknowns, the frictional force and the linear and angular accelerations. We need to eliminate one more unknown and that we can do because we know that in rolling without slipping, the angular acceleration about the center of mass is just equal to the acceleration of the center of mass divided by the radius of the ball. α = R Making this substitution for the angular acceleration, we can now solve for both the magnitude of the frictional force and the acceleration of the center of mass. ax f R f = = f = Max R I 5 MR 5 Mg sin f = Ma x We find that the acceleration of the center of mass is smaller than that of an object sliding down a frictionless ramp inclined at the same angle (which was equal to gsin. 5 ax = g sin 7 a x
8 H Why Did That Last Derivation Work? We just derived the acceleration of a ball rolling without slipping down a ramp by applying the rotational equation (τ Net = Iα in which we evaluated the torque about an axis passing through the center of mass of the ball. Recall that we obtained the rotational equation from Newton s second law and that Newton s second law is valid in inertial reference frames. The reference frame of the ball is clearly not an inertial reference frame. What is going on here? The surprising answer to this question is that we can always apply this rotational equation, even for an object that is accelerating, as long as we are considering only rotations about the center of mass of the object! This result is certainly not obvious and its proof requires the introduction of a concept, angular momentum, that we will discuss in a future unit. For the benefit of those of you who are curious, we will present a proof of this claim now. We will start with the definition of the angular momentum L of a particle about some axis as the as the cross product of r, the vector from the axis to the particle, with the momentum vector. L r p Taking the derivative of L with respect to time, we get two terms. The first term is zero since the velocity vector (dr/ and the momentum vector are parallel. We can use Newton s second law (F = dp/ to write the second term as the net torque on the particle. dl dr dp = p + r = 0 + r F = τ We will use this equation which determines the time dependence of the angular momentum vector of the particle, to show that the rotational equation (τ = Iα holds in the frame of the ball that is rolling without slipping down the ramp. The first step is to obtain an important result concerning the angular momentum of a system of particles, namely: L = L + L * Where L is the total angular momentum of a system of particles in a particular reference frame, L is the angular momentum of the center of mass of the system in that frame, and L* is the angular momentum of the system in the center of mass frame.. The proof is straightforward, but a little lengthy. We start by expressing the displacement vector is the specified frame in terms of the displacement vector of the center of mass of the system in that frame and the displacement vector in the center of mass frame. ri = r + ri * We now write down the expression for the angular momentum of a system of particles: L = ( r + ri * pi = ( r pi + ( ri * pi The first term on the right hand side of the last equation is equal to the angular momentum of the center of mass since the sum of all the individual momenta is just the total momentum of the system!
9 L = i ( r p The second term on the right hand side must be the angular momentum of the system in the center of mass frame. To demonstrate this claim, we need to first expand the individual momenta in the specified frame in terms of the individual momenta in the center of mass frame. * dri d d dri pi = mi = mi r + ri * = miv + mi * * * ( ri * pi = ( ri miv + ( ri mivi The first term on the right hand side of the last equation is zero since we can take the velocity of the center of mass vector outside the sum, leaving the mass-weighted sum of the displacements in the center of mass which must just be zero! * * ( r m v = ( m r v = 0 i i i i We are left then with our result: * * * ( ri * pi = ( ri mivi = L L = L + L * We are now finally ready to prove what we set out to prove in the beginning of this section, that we can always apply the rotational equation (τ = Iα, even for an object that is accelerating, as long as we are considering only rotations about the center of mass of the object! Suppose we fix our x-y coordinate system to the ramp as shown in Figure 6.6. This system is clearly an inertial reference frame; therefore our angular momentum y x r i R r i * Figure 6.6 The displacement vector r i in the inertial reference frame fixed to the ramp (x-y is equal to the vector sum of the the displacement vector of the center of mass R plus the displacement vector relative to the center of mass, r i *.
10 equation holds in this frame. Considering the ball to be a system of particles, we can write down the equation of motion in terms of the time rate of change of the angular momentum of the system: dl i τ i = We will now expand the torques in terms of the individual displacements: * τ i = ( ri Fi = ( r + ri Fi Similarly, we can expand the angular momentum of the system: dli * = L + L Putting this altogether, we obtain the equation: * d * r + r F = L + L ( ( i i We now have the equation we need. We just have to expand the terms and simplify. Unfortunately, once again this process is a little lengthy. We start by expanding the time rate of change of the angular momentum of the center of mass term: d L d = ( r MTotv = ( v MTotv + ( r MTot a The first term on the right hand side of the last equatin is zero since the cross product of any vector with itself is zero. The second term is equal to the net force on the system from Newton s second law. Therefore, we have obtained the expression for the time rate of change of the angular momentum of the center of mass: d L = i ( r F If we now substitute this form bak into our master equation (three above, we get cancellations that leave us with: * d * ( ri Fi = L We have now obtained our result: that the sum of the torques about an axis through the center of mass is equal to the time rate of change of angular momentum of the system in the center of mass frame. For a rigid, symmetric, solid object (such as our rolling ball, * L = I ω Differentiating this angular momentum with respect to time, we obtain our result: d * d L = I ω = I α τ = I α It s been a long haul, but we have finally proved the important result that the sum of the torques about the center of mass of a system of particles is always equal to the product of the moment of inertia about the center of mass and the angular acceleration about the center of mass, even if the system itself is accelerating!!
11
Handout 7: Torque, angular momentum, rotational kinetic energy and rolling motion. Torque and angular momentum
 Handout 7: Torque, angular momentum, rotational kinetic energy and rolling motion Torque and angular momentum In Figure, in order to turn a rod about a fixed hinge at one end, a force F is applied at a
Handout 7: Torque, angular momentum, rotational kinetic energy and rolling motion Torque and angular momentum In Figure, in order to turn a rod about a fixed hinge at one end, a force F is applied at a
11-2 A General Method, and Rolling without Slipping
 11-2 A General Method, and Rolling without Slipping Let s begin by summarizing a general method for analyzing situations involving Newton s Second Law for Rotation, such as the situation in Exploration
11-2 A General Method, and Rolling without Slipping Let s begin by summarizing a general method for analyzing situations involving Newton s Second Law for Rotation, such as the situation in Exploration
Circular Motion, Pt 2: Angular Dynamics. Mr. Velazquez AP/Honors Physics
 Circular Motion, Pt 2: Angular Dynamics Mr. Velazquez AP/Honors Physics Formulas: Angular Kinematics (θ must be in radians): s = rθ Arc Length 360 = 2π rads = 1 rev ω = θ t = v t r Angular Velocity α av
Circular Motion, Pt 2: Angular Dynamics Mr. Velazquez AP/Honors Physics Formulas: Angular Kinematics (θ must be in radians): s = rθ Arc Length 360 = 2π rads = 1 rev ω = θ t = v t r Angular Velocity α av
III. Angular Momentum Conservation (Chap. 10) Rotation. We repeat Chap. 2-8 with rotatiing objects. Eqs. of motion. Energy.
 Rotation. We repeat Chap. 2-8 with rotatiing objects. Eqs. of motion. Energy.") Chap. 10: Rotational Motion I. Rotational Kinematics II. Rotational Dynamics - Newton s Law for Rotation III. Angular Momentum Conservation (Chap. 10) 1 Toward Exam 3 Eqs. of motion o To study angular
Chap. 10: Rotational Motion I. Rotational Kinematics II. Rotational Dynamics - Newton s Law for Rotation III. Angular Momentum Conservation (Chap. 10) 1 Toward Exam 3 Eqs. of motion o To study angular
Torque/Rotational Energy Mock Exam. Instructions: (105 points) Answer the following questions. SHOW ALL OF YOUR WORK.
 Answer the following questions. SHOW ALL OF YOUR WORK.") AP Physics C Spring, 2017 Torque/Rotational Energy Mock Exam Name: Answer Key Mr. Leonard Instructions: (105 points) Answer the following questions. SHOW ALL OF YOUR WORK. (22 pts ) 1. Two masses are attached
AP Physics C Spring, 2017 Torque/Rotational Energy Mock Exam Name: Answer Key Mr. Leonard Instructions: (105 points) Answer the following questions. SHOW ALL OF YOUR WORK. (22 pts ) 1. Two masses are attached
General Definition of Torque, final. Lever Arm. General Definition of Torque 7/29/2010. Units of Chapter 10
 Units of Chapter 10 Determining Moments of Inertia Rotational Kinetic Energy Rotational Plus Translational Motion; Rolling Why Does a Rolling Sphere Slow Down? General Definition of Torque, final Taking
Units of Chapter 10 Determining Moments of Inertia Rotational Kinetic Energy Rotational Plus Translational Motion; Rolling Why Does a Rolling Sphere Slow Down? General Definition of Torque, final Taking
Chapter 10. Rotation
 Chapter 10 Rotation Rotation Rotational Kinematics: Angular velocity and Angular Acceleration Rotational Kinetic Energy Moment of Inertia Newton s nd Law for Rotation Applications MFMcGraw-PHY 45 Chap_10Ha-Rotation-Revised
Chapter 10 Rotation Rotation Rotational Kinematics: Angular velocity and Angular Acceleration Rotational Kinetic Energy Moment of Inertia Newton s nd Law for Rotation Applications MFMcGraw-PHY 45 Chap_10Ha-Rotation-Revised
Physics 131: Lecture 21. Today s Agenda
 Physics 131: Lecture 21 Today s Agenda Rotational dynamics Torque = I Angular Momentum Physics 201: Lecture 10, Pg 1 Newton s second law in rotation land Sum of the torques will equal the moment of inertia
Physics 131: Lecture 21 Today s Agenda Rotational dynamics Torque = I Angular Momentum Physics 201: Lecture 10, Pg 1 Newton s second law in rotation land Sum of the torques will equal the moment of inertia
= o + t = ot + ½ t 2 = o + 2
 Chapters 8-9 Rotational Kinematics and Dynamics Rotational motion Rotational motion refers to the motion of an object or system that spins about an axis. The axis of rotation is the line about which the
Chapters 8-9 Rotational Kinematics and Dynamics Rotational motion Rotational motion refers to the motion of an object or system that spins about an axis. The axis of rotation is the line about which the
Physics 131: Lecture 21. Today s Agenda
 Physics 131: Lecture 1 Today s Agenda Rotational dynamics Torque = I Angular Momentum Physics 01: Lecture 10, Pg 1 Newton s second law in rotation land Sum of the torques will equal the moment of inertia
Physics 131: Lecture 1 Today s Agenda Rotational dynamics Torque = I Angular Momentum Physics 01: Lecture 10, Pg 1 Newton s second law in rotation land Sum of the torques will equal the moment of inertia
Physics 207: Lecture 24. Announcements. No labs next week, May 2 5 Exam 3 review session: Wed, May 4 from 8:00 9:30 pm; here.
 Physics 07: Lecture 4 Announcements No labs next week, May 5 Exam 3 review session: Wed, May 4 from 8:00 9:30 pm; here Today s Agenda ecap: otational dynamics and torque Work and energy with example Many
Physics 07: Lecture 4 Announcements No labs next week, May 5 Exam 3 review session: Wed, May 4 from 8:00 9:30 pm; here Today s Agenda ecap: otational dynamics and torque Work and energy with example Many
AP Physics C: Rotation II. (Torque and Rotational Dynamics, Rolling Motion) Problems
 Problems") AP Physics C: Rotation II (Torque and Rotational Dynamics, Rolling Motion) Problems 1980M3. A billiard ball has mass M, radius R, and moment of inertia about the center of mass I c = 2 MR²/5 The ball is
AP Physics C: Rotation II (Torque and Rotational Dynamics, Rolling Motion) Problems 1980M3. A billiard ball has mass M, radius R, and moment of inertia about the center of mass I c = 2 MR²/5 The ball is
Your Name: PHYSICS 101 MIDTERM. Please circle your section 1 9 am Galbiati 2 10 am Kwon 3 11 am McDonald 4 12:30 pm McDonald 5 12:30 pm Kwon
 1 Your Name: PHYSICS 101 MIDTERM October 26, 2006 2 hours Please circle your section 1 9 am Galbiati 2 10 am Kwon 3 11 am McDonald 4 12:30 pm McDonald 5 12:30 pm Kwon Problem Score 1 /13 2 /20 3 /20 4
1 Your Name: PHYSICS 101 MIDTERM October 26, 2006 2 hours Please circle your section 1 9 am Galbiati 2 10 am Kwon 3 11 am McDonald 4 12:30 pm McDonald 5 12:30 pm Kwon Problem Score 1 /13 2 /20 3 /20 4
Chapter 8. Rotational Equilibrium and Rotational Dynamics. 1. Torque. 2. Torque and Equilibrium. 3. Center of Mass and Center of Gravity
 Chapter 8 Rotational Equilibrium and Rotational Dynamics 1. Torque 2. Torque and Equilibrium 3. Center of Mass and Center of Gravity 4. Torque and angular acceleration 5. Rotational Kinetic energy 6. Angular
Chapter 8 Rotational Equilibrium and Rotational Dynamics 1. Torque 2. Torque and Equilibrium 3. Center of Mass and Center of Gravity 4. Torque and angular acceleration 5. Rotational Kinetic energy 6. Angular
Physics 141 Rotational Motion 2 Page 1. Rotational Motion 2
 Physics 141 Rotational Motion 2 Page 1 Rotational Motion 2 Right handers, go over there, left handers over here. The rest of you, come with me.! Yogi Berra Torque Motion of a rigid body, like motion of
Physics 141 Rotational Motion 2 Page 1 Rotational Motion 2 Right handers, go over there, left handers over here. The rest of you, come with me.! Yogi Berra Torque Motion of a rigid body, like motion of
Rotational Kinematics and Dynamics. UCVTS AIT Physics
 Rotational Kinematics and Dynamics UCVTS AIT Physics Angular Position Axis of rotation is the center of the disc Choose a fixed reference line Point P is at a fixed distance r from the origin Angular Position,
Rotational Kinematics and Dynamics UCVTS AIT Physics Angular Position Axis of rotation is the center of the disc Choose a fixed reference line Point P is at a fixed distance r from the origin Angular Position,
Work and kinetic Energy
 Work and kinetic Energy Problem 66. M=4.5kg r = 0.05m I = 0.003kgm 2 Q: What is the velocity of mass m after it dropped a distance h? (No friction) h m=0.6kg mg Work and kinetic Energy Problem 66. M=4.5kg
Work and kinetic Energy Problem 66. M=4.5kg r = 0.05m I = 0.003kgm 2 Q: What is the velocity of mass m after it dropped a distance h? (No friction) h m=0.6kg mg Work and kinetic Energy Problem 66. M=4.5kg
Chapter 10: Dynamics of Rotational Motion
 Chapter 10: Dynamics of Rotational Motion What causes an angular acceleration? The effectiveness of a force at causing a rotation is called torque. QuickCheck 12.5 The four forces shown have the same strength.
Chapter 10: Dynamics of Rotational Motion What causes an angular acceleration? The effectiveness of a force at causing a rotation is called torque. QuickCheck 12.5 The four forces shown have the same strength.
Rotation. Kinematics Rigid Bodies Kinetic Energy. Torque Rolling. featuring moments of Inertia
 Rotation Kinematics Rigid Bodies Kinetic Energy featuring moments of Inertia Torque Rolling Angular Motion We think about rotation in the same basic way we do about linear motion How far does it go? How
Rotation Kinematics Rigid Bodies Kinetic Energy featuring moments of Inertia Torque Rolling Angular Motion We think about rotation in the same basic way we do about linear motion How far does it go? How
Angular velocity and angular acceleration CHAPTER 9 ROTATION. Angular velocity and angular acceleration. ! equations of rotational motion
 Angular velocity and angular acceleration CHAPTER 9 ROTATION! r i ds i dθ θ i Angular velocity and angular acceleration! equations of rotational motion Torque and Moment of Inertia! Newton s nd Law for
Angular velocity and angular acceleration CHAPTER 9 ROTATION! r i ds i dθ θ i Angular velocity and angular acceleration! equations of rotational motion Torque and Moment of Inertia! Newton s nd Law for
Rolling, Torque, Angular Momentum
 Chapter 11 Rolling, Torque, Angular Momentum Copyright 11.2 Rolling as Translational and Rotation Combined Motion of Translation : i.e.motion along a straight line Motion of Rotation : rotation about a
Chapter 11 Rolling, Torque, Angular Momentum Copyright 11.2 Rolling as Translational and Rotation Combined Motion of Translation : i.e.motion along a straight line Motion of Rotation : rotation about a
Rotational Kinetic Energy
 Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
PC 1141 : AY 2012 /13
 NUS Physics Society Past Year Paper Solutions PC 1141 : AY 2012 /13 Compiled by: NUS Physics Society Past Year Solution Team Yeo Zhen Yuan Ryan Goh Published on: November 17, 2015 1. An egg of mass 0.050
NUS Physics Society Past Year Paper Solutions PC 1141 : AY 2012 /13 Compiled by: NUS Physics Society Past Year Solution Team Yeo Zhen Yuan Ryan Goh Published on: November 17, 2015 1. An egg of mass 0.050
Phys 106 Practice Problems Common Quiz 1 Spring 2003
 Phys 106 Practice Problems Common Quiz 1 Spring 2003 1. For a wheel spinning with constant angular acceleration on an axis through its center, the ratio of the speed of a point on the rim to the speed
Phys 106 Practice Problems Common Quiz 1 Spring 2003 1. For a wheel spinning with constant angular acceleration on an axis through its center, the ratio of the speed of a point on the rim to the speed
Rotational Motion. Rotational Motion. Rotational Motion
 I. Rotational Kinematics II. Rotational Dynamics (Netwton s Law for Rotation) III. Angular Momentum Conservation 1. Remember how Newton s Laws for translational motion were studied: 1. Kinematics (x =
I. Rotational Kinematics II. Rotational Dynamics (Netwton s Law for Rotation) III. Angular Momentum Conservation 1. Remember how Newton s Laws for translational motion were studied: 1. Kinematics (x =
End-of-Chapter Exercises
 End-of-Chapter Exercises Exercises 1 12 are conceptual questions that are designed to see if you have understood the main concepts of the chapter. 1. Figure 11.21 shows four different cases involving a
End-of-Chapter Exercises Exercises 1 12 are conceptual questions that are designed to see if you have understood the main concepts of the chapter. 1. Figure 11.21 shows four different cases involving a
Rotation review packet. Name:
 Rotation review packet. Name:. A pulley of mass m 1 =M and radius R is mounted on frictionless bearings about a fixed axis through O. A block of equal mass m =M, suspended by a cord wrapped around the
Rotation review packet. Name:. A pulley of mass m 1 =M and radius R is mounted on frictionless bearings about a fixed axis through O. A block of equal mass m =M, suspended by a cord wrapped around the
Rotation. PHYS 101 Previous Exam Problems CHAPTER
 PHYS 101 Previous Exam Problems CHAPTER 10 Rotation Rotational kinematics Rotational inertia (moment of inertia) Kinetic energy Torque Newton s 2 nd law Work, power & energy conservation 1. Assume that
PHYS 101 Previous Exam Problems CHAPTER 10 Rotation Rotational kinematics Rotational inertia (moment of inertia) Kinetic energy Torque Newton s 2 nd law Work, power & energy conservation 1. Assume that
6. Find the net torque on the wheel in Figure about the axle through O if a = 10.0 cm and b = 25.0 cm.
 1. During a certain period of time, the angular position of a swinging door is described by θ = 5.00 + 10.0t + 2.00t 2, where θ is in radians and t is in seconds. Determine the angular position, angular
1. During a certain period of time, the angular position of a swinging door is described by θ = 5.00 + 10.0t + 2.00t 2, where θ is in radians and t is in seconds. Determine the angular position, angular
Test 7 wersja angielska
 Test 7 wersja angielska 7.1A One revolution is the same as: A) 1 rad B) 57 rad C) π/2 rad D) π rad E) 2π rad 7.2A. If a wheel turns with constant angular speed then: A) each point on its rim moves with
Test 7 wersja angielska 7.1A One revolution is the same as: A) 1 rad B) 57 rad C) π/2 rad D) π rad E) 2π rad 7.2A. If a wheel turns with constant angular speed then: A) each point on its rim moves with
Webreview Torque and Rotation Practice Test
 Please do not write on test. ID A Webreview - 8.2 Torque and Rotation Practice Test Multiple Choice Identify the choice that best completes the statement or answers the question. 1. A 0.30-m-radius automobile
Please do not write on test. ID A Webreview - 8.2 Torque and Rotation Practice Test Multiple Choice Identify the choice that best completes the statement or answers the question. 1. A 0.30-m-radius automobile
Lab 9 - Rotational Dynamics
 145 Name Date Partners Lab 9 - Rotational Dynamics OBJECTIVES To study angular motion including angular velocity and angular acceleration. To relate rotational inertia to angular motion. To determine kinetic
145 Name Date Partners Lab 9 - Rotational Dynamics OBJECTIVES To study angular motion including angular velocity and angular acceleration. To relate rotational inertia to angular motion. To determine kinetic
We define angular displacement, θ, and angular velocity, ω. What's a radian?
 We define angular displacement, θ, and angular velocity, ω Units: θ = rad ω = rad/s What's a radian? Radian is the ratio between the length of an arc and its radius note: counterclockwise is + clockwise
We define angular displacement, θ, and angular velocity, ω Units: θ = rad ω = rad/s What's a radian? Radian is the ratio between the length of an arc and its radius note: counterclockwise is + clockwise
Chapter 8 Lecture Notes
 Chapter 8 Lecture Notes Physics 2414 - Strauss Formulas: v = l / t = r θ / t = rω a T = v / t = r ω / t =rα a C = v 2 /r = ω 2 r ω = ω 0 + αt θ = ω 0 t +(1/2)αt 2 θ = (1/2)(ω 0 +ω)t ω 2 = ω 0 2 +2αθ τ
Chapter 8 Lecture Notes Physics 2414 - Strauss Formulas: v = l / t = r θ / t = rω a T = v / t = r ω / t =rα a C = v 2 /r = ω 2 r ω = ω 0 + αt θ = ω 0 t +(1/2)αt 2 θ = (1/2)(ω 0 +ω)t ω 2 = ω 0 2 +2αθ τ
Chapter 10: Rotation
 Chapter 10: Rotation Review of translational motion (motion along a straight line) Position x Displacement x Velocity v = dx/dt Acceleration a = dv/dt Mass m Newton s second law F = ma Work W = Fdcosφ
Chapter 10: Rotation Review of translational motion (motion along a straight line) Position x Displacement x Velocity v = dx/dt Acceleration a = dv/dt Mass m Newton s second law F = ma Work W = Fdcosφ
Chapter 10. Rotation of a Rigid Object about a Fixed Axis
 Chapter 10 Rotation of a Rigid Object about a Fixed Axis Angular Position Axis of rotation is the center of the disc Choose a fixed reference line. Point P is at a fixed distance r from the origin. A small
Chapter 10 Rotation of a Rigid Object about a Fixed Axis Angular Position Axis of rotation is the center of the disc Choose a fixed reference line. Point P is at a fixed distance r from the origin. A small
Exam 3 Practice Solutions
 Exam 3 Practice Solutions Multiple Choice 1. A thin hoop, a solid disk, and a solid sphere, each with the same mass and radius, are at rest at the top of an inclined plane. If all three are released at
Exam 3 Practice Solutions Multiple Choice 1. A thin hoop, a solid disk, and a solid sphere, each with the same mass and radius, are at rest at the top of an inclined plane. If all three are released at
Mechanics II. Which of the following relations among the forces W, k, N, and F must be true?
 Mechanics II 1. By applying a force F on a block, a person pulls a block along a rough surface at constant velocity v (see Figure below; directions, but not necessarily magnitudes, are indicated). Which
Mechanics II 1. By applying a force F on a block, a person pulls a block along a rough surface at constant velocity v (see Figure below; directions, but not necessarily magnitudes, are indicated). Which
PHYSICS 220. Lecture 15. Textbook Sections Lecture 15 Purdue University, Physics 220 1
 PHYSICS 220 Lecture 15 Angular Momentum Textbook Sections 9.3 9.6 Lecture 15 Purdue University, Physics 220 1 Last Lecture Overview Torque = Force that causes rotation τ = F r sin θ Work done by torque
PHYSICS 220 Lecture 15 Angular Momentum Textbook Sections 9.3 9.6 Lecture 15 Purdue University, Physics 220 1 Last Lecture Overview Torque = Force that causes rotation τ = F r sin θ Work done by torque
Chap. 10: Rotational Motion
 Chap. 10: Rotational Motion I. Rotational Kinematics II. Rotational Dynamics - Newton s Law for Rotation III. Angular Momentum Conservation (Chap. 10) 1 Newton s Laws for Rotation n e t I 3 rd part [N
Chap. 10: Rotational Motion I. Rotational Kinematics II. Rotational Dynamics - Newton s Law for Rotation III. Angular Momentum Conservation (Chap. 10) 1 Newton s Laws for Rotation n e t I 3 rd part [N
8.012 Physics I: Classical Mechanics Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE
MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE
PHYSICS 149: Lecture 21
 PHYSICS 149: Lecture 21 Chapter 8: Torque and Angular Momentum 8.2 Torque 8.4 Equilibrium Revisited 8.8 Angular Momentum Lecture 21 Purdue University, Physics 149 1 Midterm Exam 2 Wednesday, April 6, 6:30
PHYSICS 149: Lecture 21 Chapter 8: Torque and Angular Momentum 8.2 Torque 8.4 Equilibrium Revisited 8.8 Angular Momentum Lecture 21 Purdue University, Physics 149 1 Midterm Exam 2 Wednesday, April 6, 6:30
It will be most difficult for the ant to adhere to the wheel as it revolves past which of the four points? A) I B) II C) III D) IV
 I B) II C) III D) IV") AP Physics 1 Lesson 16 Homework Newton s First and Second Law of Rotational Motion Outcomes Define rotational inertia, torque, and center of gravity. State and explain Newton s first Law of Motion as it
AP Physics 1 Lesson 16 Homework Newton s First and Second Law of Rotational Motion Outcomes Define rotational inertia, torque, and center of gravity. State and explain Newton s first Law of Motion as it
PHY131H1S - Class 20. Pre-class reading quiz on Chapter 12
 PHY131H1S - Class 20 Today: Gravitational Torque Rotational Kinetic Energy Rolling without Slipping Equilibrium with Rotation Rotation Vectors Angular Momentum Pre-class reading quiz on Chapter 12 1 Last
PHY131H1S - Class 20 Today: Gravitational Torque Rotational Kinetic Energy Rolling without Slipping Equilibrium with Rotation Rotation Vectors Angular Momentum Pre-class reading quiz on Chapter 12 1 Last
Translational vs Rotational. m x. Connection Δ = = = = = = Δ = = = = = = Δ =Δ = = = = = 2 / 1/2. Work
 Translational vs Rotational / / 1/ Δ m x v dx dt a dv dt F ma p mv KE mv Work Fd / / 1/ θ ω θ α ω τ α ω ω τθ Δ I d dt d dt I L I KE I Work / θ ω α τ Δ Δ c t s r v r a v r a r Fr L pr Connection Translational
Translational vs Rotational / / 1/ Δ m x v dx dt a dv dt F ma p mv KE mv Work Fd / / 1/ θ ω θ α ω τ α ω ω τθ Δ I d dt d dt I L I KE I Work / θ ω α τ Δ Δ c t s r v r a v r a r Fr L pr Connection Translational
Chapter 11 Rolling, Torque, and Angular Momentum
 Prof. Dr. I. Nasser Chapter11-I November, 017 Chapter 11 Rolling, Torque, and Angular Momentum 11-1 ROLLING AS TRANSLATION AND ROTATION COMBINED Translation vs. Rotation General Rolling Motion General
Prof. Dr. I. Nasser Chapter11-I November, 017 Chapter 11 Rolling, Torque, and Angular Momentum 11-1 ROLLING AS TRANSLATION AND ROTATION COMBINED Translation vs. Rotation General Rolling Motion General
Suggested Problems. Chapter 1
 Suggested Problems Ch1: 49, 51, 86, 89, 93, 95, 96, 102. Ch2: 9, 18, 20, 44, 51, 74, 75, 93. Ch3: 4, 14, 46, 54, 56, 75, 91, 80, 82, 83. Ch4: 15, 59, 60, 62. Ch5: 14, 52, 54, 65, 67, 83, 87, 88, 91, 93,
Suggested Problems Ch1: 49, 51, 86, 89, 93, 95, 96, 102. Ch2: 9, 18, 20, 44, 51, 74, 75, 93. Ch3: 4, 14, 46, 54, 56, 75, 91, 80, 82, 83. Ch4: 15, 59, 60, 62. Ch5: 14, 52, 54, 65, 67, 83, 87, 88, 91, 93,
Physics 5A Final Review Solutions
 Physics A Final Review Solutions Eric Reichwein Department of Physics University of California, Santa Cruz November 6, 0. A stone is dropped into the water from a tower 44.m above the ground. Another stone
Physics A Final Review Solutions Eric Reichwein Department of Physics University of California, Santa Cruz November 6, 0. A stone is dropped into the water from a tower 44.m above the ground. Another stone
31 ROTATIONAL KINEMATICS
 31 ROTATIONAL KINEMATICS 1. Compare and contrast circular motion and rotation? Address the following Which involves an object and which involves a system? Does an object/system in circular motion have
31 ROTATIONAL KINEMATICS 1. Compare and contrast circular motion and rotation? Address the following Which involves an object and which involves a system? Does an object/system in circular motion have
Assignment 9. to roll without slipping, how large must F be? Ans: F = R d mgsinθ.
 Assignment 9 1. A heavy cylindrical container is being rolled up an incline as shown, by applying a force parallel to the incline. The static friction coefficient is µ s. The cylinder has radius R, mass
Assignment 9 1. A heavy cylindrical container is being rolled up an incline as shown, by applying a force parallel to the incline. The static friction coefficient is µ s. The cylinder has radius R, mass
Rolling, Torque, and Angular Momentum
 AP Physics C Rolling, Torque, and Angular Momentum Introduction: Rolling: In the last unit we studied the rotation of a rigid body about a fixed axis. We will now extend our study to include cases where
AP Physics C Rolling, Torque, and Angular Momentum Introduction: Rolling: In the last unit we studied the rotation of a rigid body about a fixed axis. We will now extend our study to include cases where
Physics 101: Lecture 15 Torque, F=ma for rotation, and Equilibrium
 Physics 101: Lecture 15 Torque, F=ma for rotation, and Equilibrium Strike (Day 10) Prelectures, checkpoints, lectures continue with no change. Take-home quizzes this week. See Elaine Schulte s email. HW
Physics 101: Lecture 15 Torque, F=ma for rotation, and Equilibrium Strike (Day 10) Prelectures, checkpoints, lectures continue with no change. Take-home quizzes this week. See Elaine Schulte s email. HW
Two-Dimensional Rotational Kinematics
 Two-Dimensional Rotational Kinematics Rigid Bodies A rigid body is an extended object in which the distance between any two points in the object is constant in time. Springs or human bodies are non-rigid
Two-Dimensional Rotational Kinematics Rigid Bodies A rigid body is an extended object in which the distance between any two points in the object is constant in time. Springs or human bodies are non-rigid
AP Physics QUIZ Chapters 10
 Name: 1. Torque is the rotational analogue of (A) Kinetic Energy (B) Linear Momentum (C) Acceleration (D) Force (E) Mass A 5-kilogram sphere is connected to a 10-kilogram sphere by a rigid rod of negligible
Name: 1. Torque is the rotational analogue of (A) Kinetic Energy (B) Linear Momentum (C) Acceleration (D) Force (E) Mass A 5-kilogram sphere is connected to a 10-kilogram sphere by a rigid rod of negligible
PHYS 111 HOMEWORK #11
 PHYS 111 HOMEWORK #11 Due date: You have a choice here. You can submit this assignment on Tuesday, December and receive a 0 % bonus, or you can submit this for normal credit on Thursday, 4 December. If
PHYS 111 HOMEWORK #11 Due date: You have a choice here. You can submit this assignment on Tuesday, December and receive a 0 % bonus, or you can submit this for normal credit on Thursday, 4 December. If
Moment of Inertia & Newton s Laws for Translation & Rotation
 Moment of Inertia & Newton s Laws for Translation & Rotation In this training set, you will apply Newton s 2 nd Law for rotational motion: Στ = Σr i F i = Iα I is the moment of inertia of an object: I
Moment of Inertia & Newton s Laws for Translation & Rotation In this training set, you will apply Newton s 2 nd Law for rotational motion: Στ = Σr i F i = Iα I is the moment of inertia of an object: I
Rotation of Rigid Objects
 Notes 12 Rotation and Extended Objects Page 1 Rotation of Rigid Objects Real objects have "extent". The mass is spread out over discrete or continuous positions. THERE IS A DISTRIBUTION OF MASS TO "AN
Notes 12 Rotation and Extended Objects Page 1 Rotation of Rigid Objects Real objects have "extent". The mass is spread out over discrete or continuous positions. THERE IS A DISTRIBUTION OF MASS TO "AN
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Review questions. Before the collision, 70 kg ball is stationary. Afterward, the 30 kg ball is stationary and 70 kg ball is moving to the right.
 Review questions Before the collision, 70 kg ball is stationary. Afterward, the 30 kg ball is stationary and 70 kg ball is moving to the right. 30 kg 70 kg v (a) Is this collision elastic? (b) Find the
Review questions Before the collision, 70 kg ball is stationary. Afterward, the 30 kg ball is stationary and 70 kg ball is moving to the right. 30 kg 70 kg v (a) Is this collision elastic? (b) Find the
Chapter 8. Rotational Motion
 Chapter 8 Rotational Motion The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of
Chapter 8 Rotational Motion The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of
Rotational Dynamics. Slide 2 / 34. Slide 1 / 34. Slide 4 / 34. Slide 3 / 34. Slide 6 / 34. Slide 5 / 34. Moment of Inertia. Parallel Axis Theorem
 Slide 1 / 34 Rotational ynamics l Slide 2 / 34 Moment of Inertia To determine the moment of inertia we divide the object into tiny masses of m i a distance r i from the center. is the sum of all the tiny
Slide 1 / 34 Rotational ynamics l Slide 2 / 34 Moment of Inertia To determine the moment of inertia we divide the object into tiny masses of m i a distance r i from the center. is the sum of all the tiny
Rotation of Rigid Objects
 Notes 12 Rotation and Extended Objects Page 1 Rotation of Rigid Objects Real objects have "extent". The mass is spread out over discrete or continuous positions. THERE IS A DISTRIBUTION OF MASS TO "AN
Notes 12 Rotation and Extended Objects Page 1 Rotation of Rigid Objects Real objects have "extent". The mass is spread out over discrete or continuous positions. THERE IS A DISTRIBUTION OF MASS TO "AN
Kinematics (special case) Dynamics gravity, tension, elastic, normal, friction. Energy: kinetic, potential gravity, spring + work (friction)
 Dynamics gravity, tension, elastic, normal, friction. Energy: kinetic, potential gravity, spring + work (friction)") Kinematics (special case) a = constant 1D motion 2D projectile Uniform circular Dynamics gravity, tension, elastic, normal, friction Motion with a = constant Newton s Laws F = m a F 12 = F 21 Time & Position
Kinematics (special case) a = constant 1D motion 2D projectile Uniform circular Dynamics gravity, tension, elastic, normal, friction Motion with a = constant Newton s Laws F = m a F 12 = F 21 Time & Position
Rolling, Torque & Angular Momentum
 PHYS 101 Previous Exam Problems CHAPTER 11 Rolling, Torque & Angular Momentum Rolling motion Torque Angular momentum Conservation of angular momentum 1. A uniform hoop (ring) is rolling smoothly from the
PHYS 101 Previous Exam Problems CHAPTER 11 Rolling, Torque & Angular Momentum Rolling motion Torque Angular momentum Conservation of angular momentum 1. A uniform hoop (ring) is rolling smoothly from the
Forces of Rolling. 1) Ifobjectisrollingwith a com =0 (i.e.no netforces), then v com =ωr = constant (smooth roll)
 Ifobjectisrollingwith a com =0 (i.e.no netforces), then v com =ωr = constant (smooth roll)") Physics 2101 Section 3 March 12 rd : Ch. 10 Announcements: Mid-grades posted in PAW Quiz today I will be at the March APS meeting the week of 15-19 th. Prof. Rich Kurtz will help me. Class Website: http://www.phys.lsu.edu/classes/spring2010/phys2101-3/
Physics 2101 Section 3 March 12 rd : Ch. 10 Announcements: Mid-grades posted in PAW Quiz today I will be at the March APS meeting the week of 15-19 th. Prof. Rich Kurtz will help me. Class Website: http://www.phys.lsu.edu/classes/spring2010/phys2101-3/
are (0 cm, 10 cm), (10 cm, 10 cm), and (10 cm, 0 cm), respectively. Solve: The coordinates of the center of mass are = = = (200 g g g)
, (10 cm, 10 cm), and (10 cm, 0 cm), respectively. Solve: The coordinates of the center of mass are = = = (200 g g g)") Rotational Motion Problems Solutions.. Model: A spinning skater, whose arms are outstretched, is a rigid rotating body. Solve: The speed v rω, where r 40 / 0.70 m. Also, 80 rpm (80) π/60 rad/s 6 π rad/s.
Rotational Motion Problems Solutions.. Model: A spinning skater, whose arms are outstretched, is a rigid rotating body. Solve: The speed v rω, where r 40 / 0.70 m. Also, 80 rpm (80) π/60 rad/s 6 π rad/s.
Rotational Dynamics Smart Pulley
 Rotational Dynamics Smart Pulley The motion of the flywheel of a steam engine, an airplane propeller, and any rotating wheel are examples of a very important type of motion called rotational motion. If
Rotational Dynamics Smart Pulley The motion of the flywheel of a steam engine, an airplane propeller, and any rotating wheel are examples of a very important type of motion called rotational motion. If
5/6/2018. Rolling Without Slipping. Rolling Without Slipping. QuickCheck 12.10
 Rolling Without Slipping Rolling is a combination of rotation and translation. For an object that rolls without slipping, the translation of the center of mass is related to the angular velocity by Slide
Rolling Without Slipping Rolling is a combination of rotation and translation. For an object that rolls without slipping, the translation of the center of mass is related to the angular velocity by Slide
Physics 4A Solutions to Chapter 10 Homework
 Physics 4A Solutions to Chapter 0 Homework Chapter 0 Questions: 4, 6, 8 Exercises & Problems 6, 3, 6, 4, 45, 5, 5, 7, 8 Answers to Questions: Q 0-4 (a) positive (b) zero (c) negative (d) negative Q 0-6
Physics 4A Solutions to Chapter 0 Homework Chapter 0 Questions: 4, 6, 8 Exercises & Problems 6, 3, 6, 4, 45, 5, 5, 7, 8 Answers to Questions: Q 0-4 (a) positive (b) zero (c) negative (d) negative Q 0-6
Chapter 11. Angular Momentum
 Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
Notes on Torque. We ve seen that if we define torque as rfsinθ, and the N 2. i i
 Notes on Torque We ve seen that if we define torque as rfsinθ, and the moment of inertia as N, we end up with an equation mr i= 1 that looks just like Newton s Second Law There is a crucial difference,
Notes on Torque We ve seen that if we define torque as rfsinθ, and the moment of inertia as N, we end up with an equation mr i= 1 that looks just like Newton s Second Law There is a crucial difference,
Circular Motion Dynamics Concept Questions
 Circular Motion Dynamics Concept Questions Problem 1: A puck of mass m is moving in a circle at constant speed on a frictionless table as shown above. The puck is connected by a string to a suspended bob,
Circular Motion Dynamics Concept Questions Problem 1: A puck of mass m is moving in a circle at constant speed on a frictionless table as shown above. The puck is connected by a string to a suspended bob,
Name (please print): UW ID# score last first
: UW ID# score last first") Name (please print): UW ID# score last first Question I. (20 pts) Projectile motion A ball of mass 0.3 kg is thrown at an angle of 30 o above the horizontal. Ignore air resistance. It hits the ground 100
Name (please print): UW ID# score last first Question I. (20 pts) Projectile motion A ball of mass 0.3 kg is thrown at an angle of 30 o above the horizontal. Ignore air resistance. It hits the ground 100
Physics 2210 Fall smartphysics 16 Rotational Dynamics 11/13/2015
 Physics 10 Fall 015 smartphysics 16 Rotational Dynamics 11/13/015 A rotor consists of a thin rod of length l=60 cm, mass m=10.0 kg, with two spheres attached to the ends. Each sphere has radius R=10 cm,
Physics 10 Fall 015 smartphysics 16 Rotational Dynamics 11/13/015 A rotor consists of a thin rod of length l=60 cm, mass m=10.0 kg, with two spheres attached to the ends. Each sphere has radius R=10 cm,
TutorBreeze.com 7. ROTATIONAL MOTION. 3. If the angular velocity of a spinning body points out of the page, then describe how is the body spinning?
 1. rpm is about rad/s. 7. ROTATIONAL MOTION 2. A wheel rotates with constant angular acceleration of π rad/s 2. During the time interval from t 1 to t 2, its angular displacement is π rad. At time t 2
1. rpm is about rad/s. 7. ROTATIONAL MOTION 2. A wheel rotates with constant angular acceleration of π rad/s 2. During the time interval from t 1 to t 2, its angular displacement is π rad. At time t 2
1 MR SAMPLE EXAM 3 FALL 2013
 SAMPLE EXAM 3 FALL 013 1. A merry-go-round rotates from rest with an angular acceleration of 1.56 rad/s. How long does it take to rotate through the first rev? A) s B) 4 s C) 6 s D) 8 s E) 10 s. A wheel,
SAMPLE EXAM 3 FALL 013 1. A merry-go-round rotates from rest with an angular acceleration of 1.56 rad/s. How long does it take to rotate through the first rev? A) s B) 4 s C) 6 s D) 8 s E) 10 s. A wheel,
Classical Mechanics Lecture 15
 Classical Mechanics Lecture 5 Today s Concepts: a) Parallel Axis Theorem b) Torque & Angular Acceleration Mechanics Lecture 5, Slide Unit 4 Main Points Mechanics Lecture 4, Slide Unit 4 Main Points Mechanics
Classical Mechanics Lecture 5 Today s Concepts: a) Parallel Axis Theorem b) Torque & Angular Acceleration Mechanics Lecture 5, Slide Unit 4 Main Points Mechanics Lecture 4, Slide Unit 4 Main Points Mechanics
Angular Displacement. θ i. 1rev = 360 = 2π rads. = "angular displacement" Δθ = θ f. π = circumference. diameter
 Rotational Motion Angular Displacement π = circumference diameter π = circumference 2 radius circumference = 2πr Arc length s = rθ, (where θ in radians) θ 1rev = 360 = 2π rads Δθ = θ f θ i = "angular displacement"
Rotational Motion Angular Displacement π = circumference diameter π = circumference 2 radius circumference = 2πr Arc length s = rθ, (where θ in radians) θ 1rev = 360 = 2π rads Δθ = θ f θ i = "angular displacement"
Physics 201. Professor P. Q. Hung. 311B, Physics Building. Physics 201 p. 1/1
 Physics 201 p. 1/1 Physics 201 Professor P. Q. Hung 311B, Physics Building Physics 201 p. 2/1 Rotational Kinematics and Energy Rotational Kinetic Energy, Moment of Inertia All elements inside the rigid
Physics 201 p. 1/1 Physics 201 Professor P. Q. Hung 311B, Physics Building Physics 201 p. 2/1 Rotational Kinematics and Energy Rotational Kinetic Energy, Moment of Inertia All elements inside the rigid
Torque. Introduction. Torque. PHY torque - J. Hedberg
 Torque PHY 207 - torque - J. Hedberg - 2017 1. Introduction 2. Torque 1. Lever arm changes 3. Net Torques 4. Moment of Rotational Inertia 1. Moment of Inertia for Arbitrary Shapes 2. Parallel Axis Theorem
Torque PHY 207 - torque - J. Hedberg - 2017 1. Introduction 2. Torque 1. Lever arm changes 3. Net Torques 4. Moment of Rotational Inertia 1. Moment of Inertia for Arbitrary Shapes 2. Parallel Axis Theorem
Physics 11 Fall 2012 Practice Problems 6
 Physics 11 Fall 2012 Practice Problems 6 1. Two points are on a disk that is turning about a fixed axis perpendicular to the disk and through its center at increasing angular velocity. One point is on
Physics 11 Fall 2012 Practice Problems 6 1. Two points are on a disk that is turning about a fixed axis perpendicular to the disk and through its center at increasing angular velocity. One point is on
Angular Momentum System of Particles Concept Questions
 Question 1: Angular Momentum Angular Momentum System of Particles Concept Questions A non-symmetric body rotates with an angular speed ω about the z axis. Relative to the origin 1. L 0 is constant. 2.
Question 1: Angular Momentum Angular Momentum System of Particles Concept Questions A non-symmetric body rotates with an angular speed ω about the z axis. Relative to the origin 1. L 0 is constant. 2.
Rotational motion problems
 Rotational motion problems. (Massive pulley) Masses m and m 2 are connected by a string that runs over a pulley of radius R and moment of inertia I. Find the acceleration of the two masses, as well as
Rotational motion problems. (Massive pulley) Masses m and m 2 are connected by a string that runs over a pulley of radius R and moment of inertia I. Find the acceleration of the two masses, as well as
Physics 201 Exam 3 (Monday, November 5) Fall 2012 (Saslow)
 Fall 2012 (Saslow)") Physics 201 Exam 3 (Monday, November 5) Fall 2012 (Saslow) Name (printed) Lab Section(+2 pts) Name (signed as on ID) Multiple choice Section. Circle the correct answer. No work need be shown and no partial
Physics 201 Exam 3 (Monday, November 5) Fall 2012 (Saslow) Name (printed) Lab Section(+2 pts) Name (signed as on ID) Multiple choice Section. Circle the correct answer. No work need be shown and no partial
Chapters 10 & 11: Rotational Dynamics Thursday March 8 th
 Chapters 10 & 11: Rotational Dynamics Thursday March 8 th Review of rotational kinematics equations Review and more on rotational inertia Rolling motion as rotation and translation Rotational kinetic energy
Chapters 10 & 11: Rotational Dynamics Thursday March 8 th Review of rotational kinematics equations Review and more on rotational inertia Rolling motion as rotation and translation Rotational kinetic energy
ΣF = ma Στ = Iα ½mv 2 ½Iω 2. mv Iω
 Thur Oct 22 Assign 9 Friday Today: Torques Angular Momentum x θ v ω a α F τ m I Roll without slipping: x = r Δθ v LINEAR = r ω a LINEAR = r α ΣF = ma Στ = Iα ½mv 2 ½Iω 2 I POINT = MR 2 I HOOP = MR 2 I
Thur Oct 22 Assign 9 Friday Today: Torques Angular Momentum x θ v ω a α F τ m I Roll without slipping: x = r Δθ v LINEAR = r ω a LINEAR = r α ΣF = ma Στ = Iα ½mv 2 ½Iω 2 I POINT = MR 2 I HOOP = MR 2 I
Chapter 9-10 Test Review
 Chapter 9-10 Test Review Chapter Summary 9.2. The Second Condition for Equilibrium Explain torque and the factors on which it depends. Describe the role of torque in rotational mechanics. 10.1. Angular
Chapter 9-10 Test Review Chapter Summary 9.2. The Second Condition for Equilibrium Explain torque and the factors on which it depends. Describe the role of torque in rotational mechanics. 10.1. Angular
General Physics I. Lecture 10: Rolling Motion and Angular Momentum.
 General Physics I Lecture 10: Rolling Motion and Angular Momentum Prof. WAN, Xin (万歆) 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Rolling motion of a rigid object: center-of-mass motion
General Physics I Lecture 10: Rolling Motion and Angular Momentum Prof. WAN, Xin (万歆) 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Rolling motion of a rigid object: center-of-mass motion
Uniform Circular Motion:-Circular motion is said to the uniform if the speed of the particle (along the circular path) remains constant.
 remains constant.") Circular Motion:- Uniform Circular Motion:-Circular motion is said to the uniform if the speed of the particle (along the circular path) remains constant. Angular Displacement:- Scalar form:-?s = r?θ Vector
Circular Motion:- Uniform Circular Motion:-Circular motion is said to the uniform if the speed of the particle (along the circular path) remains constant. Angular Displacement:- Scalar form:-?s = r?θ Vector
Dr. Galeazzi PHY205 Final Exam December 12, I.D. number:
 Signature: I.D. number: Name: 1 You must do the first two problems which consists of five multiple choice questions each. Then you must do four of the five long problems numbered 3-7. Clearly cross out
Signature: I.D. number: Name: 1 You must do the first two problems which consists of five multiple choice questions each. Then you must do four of the five long problems numbered 3-7. Clearly cross out
Physics of Rotation. Physics 109, Introduction To Physics Fall 2017
 Physics of Rotation Physics 109, Introduction To Physics Fall 017 Outline Next two lab periods Rolling without slipping Angular Momentum Comparison with Translation New Rotational Terms Rotational and
Physics of Rotation Physics 109, Introduction To Physics Fall 017 Outline Next two lab periods Rolling without slipping Angular Momentum Comparison with Translation New Rotational Terms Rotational and
Problem Set x Classical Mechanics, Fall 2016 Massachusetts Institute of Technology. 1. Moment of Inertia: Disc and Washer
 8.01x Classical Mechanics, Fall 2016 Massachusetts Institute of Technology Problem Set 10 1. Moment of Inertia: Disc and Washer (a) A thin uniform disc of mass M and radius R is mounted on an axis passing
8.01x Classical Mechanics, Fall 2016 Massachusetts Institute of Technology Problem Set 10 1. Moment of Inertia: Disc and Washer (a) A thin uniform disc of mass M and radius R is mounted on an axis passing
Lesson 8. Luis Anchordoqui. Physics 168. Thursday, October 11, 18
 Lesson 8 Physics 168 1 Rolling 2 Intuitive Question Why is it that when a body is rolling on a plane without slipping the point of contact with the plane does not move? A simple answer to this question
Lesson 8 Physics 168 1 Rolling 2 Intuitive Question Why is it that when a body is rolling on a plane without slipping the point of contact with the plane does not move? A simple answer to this question
CHAPTER 10 ROTATION OF A RIGID OBJECT ABOUT A FIXED AXIS WEN-BIN JIAN ( 簡紋濱 ) DEPARTMENT OF ELECTROPHYSICS NATIONAL CHIAO TUNG UNIVERSITY
 DEPARTMENT OF ELECTROPHYSICS NATIONAL CHIAO TUNG UNIVERSITY") CHAPTER 10 ROTATION OF A RIGID OBJECT ABOUT A FIXED AXIS WEN-BIN JIAN ( 簡紋濱 ) DEPARTMENT OF ELECTROPHYSICS NATIONAL CHIAO TUNG UNIVERSITY OUTLINE 1. Angular Position, Velocity, and Acceleration 2. Rotational
CHAPTER 10 ROTATION OF A RIGID OBJECT ABOUT A FIXED AXIS WEN-BIN JIAN ( 簡紋濱 ) DEPARTMENT OF ELECTROPHYSICS NATIONAL CHIAO TUNG UNIVERSITY OUTLINE 1. Angular Position, Velocity, and Acceleration 2. Rotational
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Physics Department 8.01 Physics I Fall Term 2009 Review Module on Solving N equations in N unknowns
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Physics Department 8.01 Physics I Fall Term 2009 Review Module on Solving N equations in N unknowns Most students first exposure to solving N linear equations in N
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Physics Department 8.01 Physics I Fall Term 2009 Review Module on Solving N equations in N unknowns Most students first exposure to solving N linear equations in N
Torque and Rotation Lecture 7
 Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Mechanics Topic D (Rotation) - 1 David Apsley
 - 1 David Apsley") TOPIC D: ROTATION SPRING 2019 1. Angular kinematics 1.1 Angular velocity and angular acceleration 1.2 Constant-angular-acceleration formulae 1.3 Displacement, velocity and acceleration in circular motion
TOPIC D: ROTATION SPRING 2019 1. Angular kinematics 1.1 Angular velocity and angular acceleration 1.2 Constant-angular-acceleration formulae 1.3 Displacement, velocity and acceleration in circular motion
Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1
 Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1 Physics 141. Lecture 18. Course Information. Topics to be discussed today: A
Physics 141. Lecture 18. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 18, Page 1 Physics 141. Lecture 18. Course Information. Topics to be discussed today: A
Description: Using conservation of energy, find the final velocity of a "yo yo" as it unwinds under the influence of gravity.
 Chapter 10 [ Edit ] Overview Summary View Diagnostics View Print View with Answers Chapter 10 Due: 11:59pm on Sunday, November 6, 2016 To understand how points are awarded, read the Grading Policy for
Chapter 10 [ Edit ] Overview Summary View Diagnostics View Print View with Answers Chapter 10 Due: 11:59pm on Sunday, November 6, 2016 To understand how points are awarded, read the Grading Policy for