ME451 Kinematics and Dynamics of Machine Systems
|
|
|
- Anis Carpenter
- 6 years ago
- Views:
Transcription
1 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 October 30, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Computer science education cannot make anybody an expert programmer any more than studying brushes and pigment can make somebody an expert painter. -- Eric Raymond
2 Before we get started 2 Last time Wrapped up wrecker boom example simengine2d-related MATLAB implementation issues Focus on assembling Phi, Nu, Gamma, and Jac Today Virtual displacements and virtual work (this is very esotheric) Start working towards deriving the equations of motion of a rigid body Midterm exam: 11/04/2014 (during regular class hours, same room) Open everything Midterm Review: on 11/03/2014 Starts at 7:15 pm, runs as long as needed Room TBA Project 1 made available online Due date: Nov 11 at 11:59 PM Requires you to use simengine2d in conjunction with excavator example discussed in class No new homework assigned this week
3 Final Project Related 3 Proposal for Final Project due in less than three weeks Due 11/18/2014 at 11:59 PM Post your Final Project proposal online to get feedback and the go-ahead from me You can work on teams of up to two students You can choose one of several alternatives: A project that uses your simengine2d to some useful end A project that uses ADAMS to some useful end A project in which you formalized a general purpose modeling language (for the ADM/ACF files), a parser, data structures and demonstrate your contribution in conjunction with your simengine2d Other ideas that make sense, are feasible, and the scope of work is sufficient
4 ME 451 Automatic A Grade 4 There will be an automatic A for the student who fulfills the following requirements Has the most versatile; i.e., feature-rich, simengine2d engine All the features claimed to be supported by his/her simengine2d have been validated using ADAMS results to confirm correctness of behavior Has got at least a 60% composite grade for the rest of the class Composite grade averages scores from projects, assignments, midterms, etc. Since it is plausible that a team of two people has worked on simengine2d both students will get an automatic A grade
5 ME451 Final Exam [Tuesday, December 16, 2:45 PM Room TBA] 5 The final exam will take place as follows Part 1: You will be given an ADM/ACF pair of input files for a simple mechanism and asked to use your simengine2d to run an analysis and generate a couple of plots that show the time evolution of a component of the mechanism Part 2: You will be given a mechanism and will be asked to Provide an ADM/ACF file that models the mechanism Use your simengine2d to determine the time evolution of the mechanism Provide plots that show the time evolution of some quantities of interest Example: Position of the center of mass of body 2, reaction force in the revolute joint between body 2 and ground, etc. Part 3: Zip your simengine2d in a file, along with the ADM/ACF files and the png images of the plots you obtained and to negrut@engr.wisc.edu There will be no pen and paper component for the final exam
6 Purpose of Chapter 6 6 At the end of this chapter you should understand what dynamics means and how you should go about carrying out a dynamics analysis We ll learn a couple of things, probably the most important being: How to formulate and then solve the equations that govern the time evolution of a system of bodies in planar motion These equations are differential equations and they are called equations of motion As many bodies as you wish, connected by any joints we ve learned about How to compute the reaction forces in any joint connecting any two bodies in the mechanism How to develop MATLAB code that allows one to carry dynamics analysis of 2D mechanisms 6
7 Kinematics vs. Dynamics 7 Kinematics We include as many actuators as kinematic degrees of freedom We end up with NDOF = 0 That is, we have as many constraints as generalized coordinates We find the (generalized) positions, velocities, and accelerations by solving algebraic problems (both nonlinear and linear) We do not care about forces, only that certain motions are imposed on the mechanism. We do not care about body shape nor inertia properties Dynamics The time evolution of the system is dictated by the applied external forces and motions We have that NDOF 0 yet true dynamics occurs at NDOF>0 The governing equations are differential or differential-algebraic equations Forces acting on bodies and inertia properties of bodies in mechanism are very relevant
8 Some clarifications 8 Dynamics key question: how can I get the acceleration of each body of the mechanism? Why is acceleration so relevant? If you know the acceleration you can integrate it twice to get velocity and position information for each body How is the acceleration of a body measured in the first place? You attach a reference frame on body i and measure the acceleration of the body reference frame with respect to the global reference frame: The answer to the key question: To get the acceleration of each body, you first need to formulate the equations of motion Remember F=ma from ME240? Actually, the way we state this is ma=f, which is the equation of motion, that is, what we are after here
9 Equations of motion of ONE planar RIGID body 9 Framework: We are dealing with rigid bodies For a couple of lectures we ll consider only one body We ll extend to more bodies in two weeks What are we after? Proving that for one body with a reference frame attached at its center of mass location the equations of motion are: r is the position of the body local reference frame is the orientation of the body local reference frame
10 Equations of Motion (EOM) Some clarifications re previous slide 10 Centroidal reference frame of a body A reference frame located right at the center of mass of that body How is this special? It s special since a certain integral vanishes... What is J? Mass moment of inertia NOTE: Textbook uses misleading notation
11 Roadmap, Dynamics Component of ME451 [pretty much from now to end of semester] 11 Discuss concept of virtual work and the concept of virtual displacement Principle of virtual work and D Alembert s principle used later on Partial derivatives haunting us again (when discussing virtual displacements) Write the differential EOM for a single rigid body Newton-Euler equations Consider the special case of bodies w/ centroidal reference frame Centroid, mass moment of inertia, parallel axis [Steiner s] theorem Derive the variational EOM for constrained planar systems Virtual work and generalized forces Formulate and solve the mixed differential-algebraic EOM for constrained systems Lagrange multiplier theorem Newmark formula for discretizing differential equations Transforms differential equations into algebraic equations
12 Two Important Principles 12 Principle of Virtual Work Applies to a collection of particles States that a configuration is an equilibrium configuration if and only if the virtual work of the forces acting on the collection of particle is zero D Alembert s Principle For a collection of particles experiencing accelerated motion you can still fall back on the Principle of Virtual Work when you also include in the set of forces acting on each particle its inertia force NOTE: we are talking here about a collection of particles Consequently, we ll have to regard each rigid body as a collection of particles that are rigidly connected to each other and that together make up the body
13 [Side Trip] Two Principles, Comments 13 Remark on the Principle of Virtual Work The power of this method stems from the fact that it excludes from the analysis forces that do no work during a virtual displacement In particular constraint forces that are due to kinematic constraint do no work (under certain circumstances) Remark by Lagrange on D Alembert s Principle D Alembert had reduced dynamics to statics by means of his principle NOTE: We will need to come up with expression of the virtual work δw produced by a force that moves through a virtual displacements of a point P, that is δ P

14 Virtual Work and Virtual Displacement 14 Y j O G-RF i P r r X P y F P s P O x L-RF f
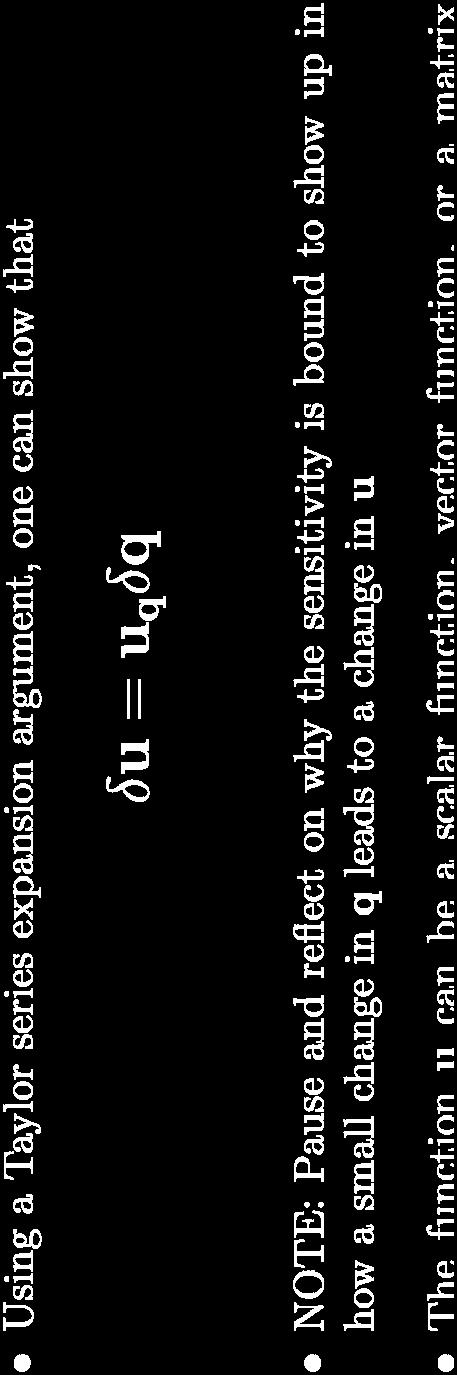
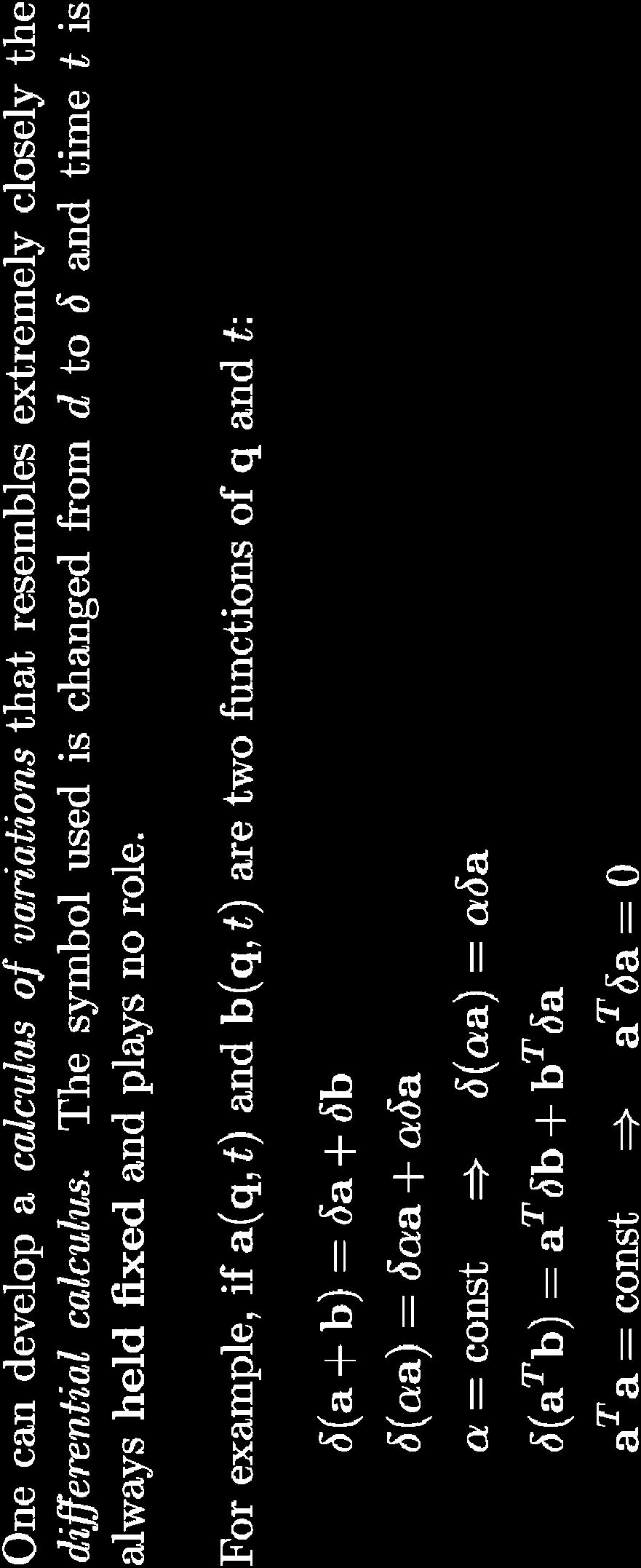
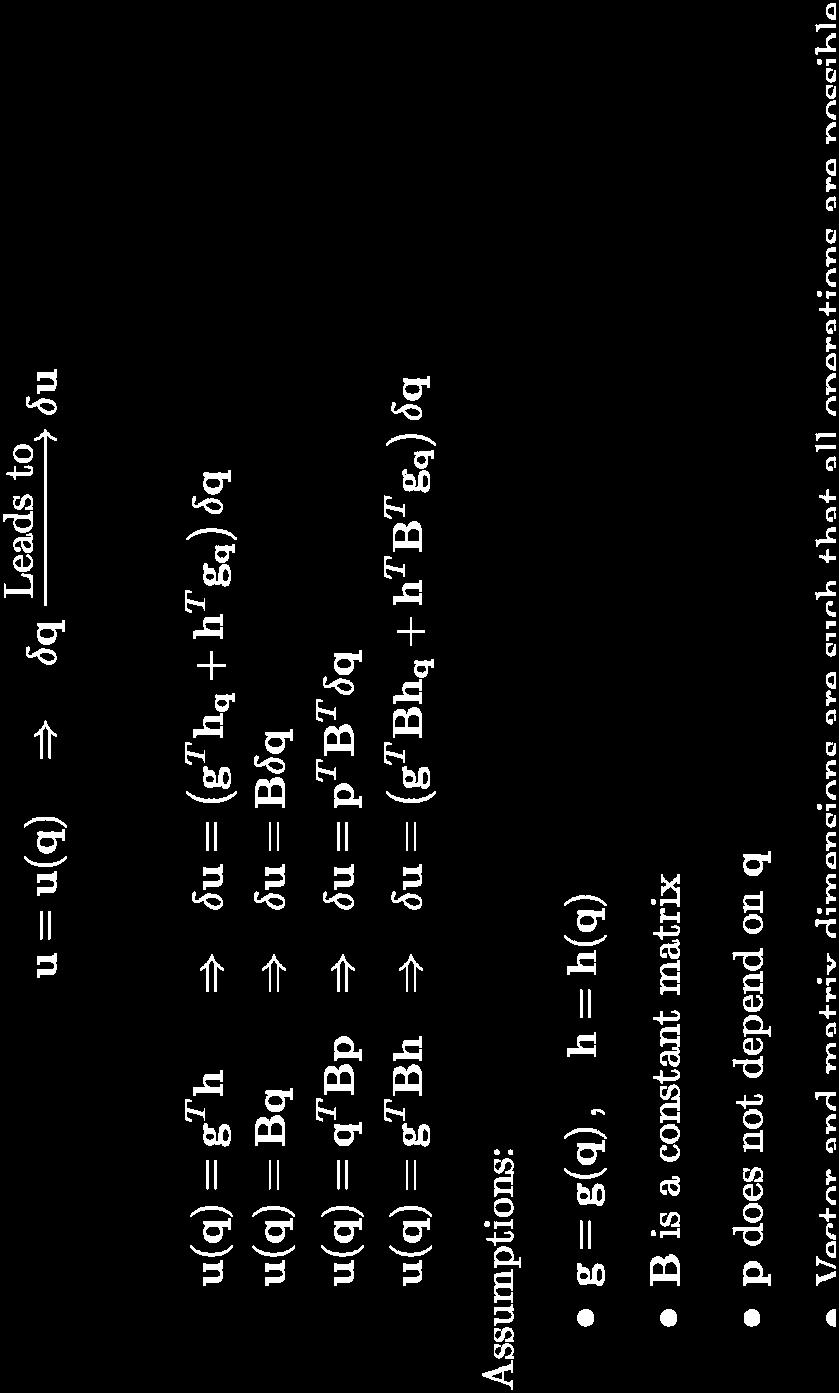
15 Calculus of Variations



16 Calculus of Variations [Cntd.] 16

17 Calculus of Variations [Cntd.] 17

18 Calculus of Variations [Cntd.] 18
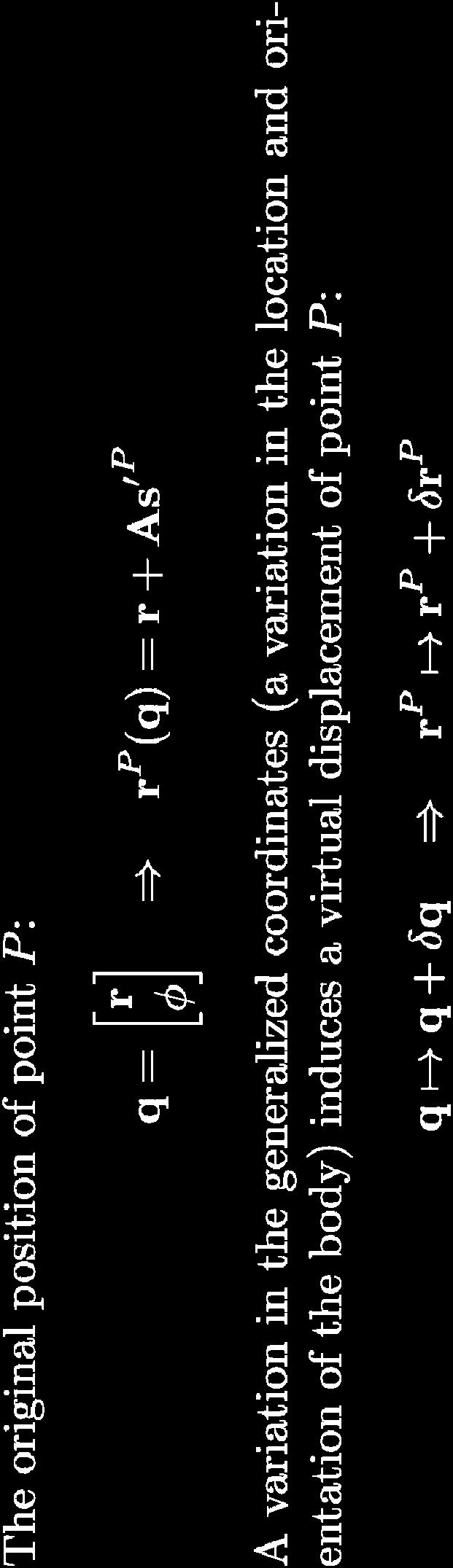
![Calculus of Variations in ME451 [important slide to understand] 19 In our case we are interested in changes in kinematic](/docs-images/78/78413612/images/19-0.jpg "quantities (locations of a point P, of the orientation matrix A, etc.")

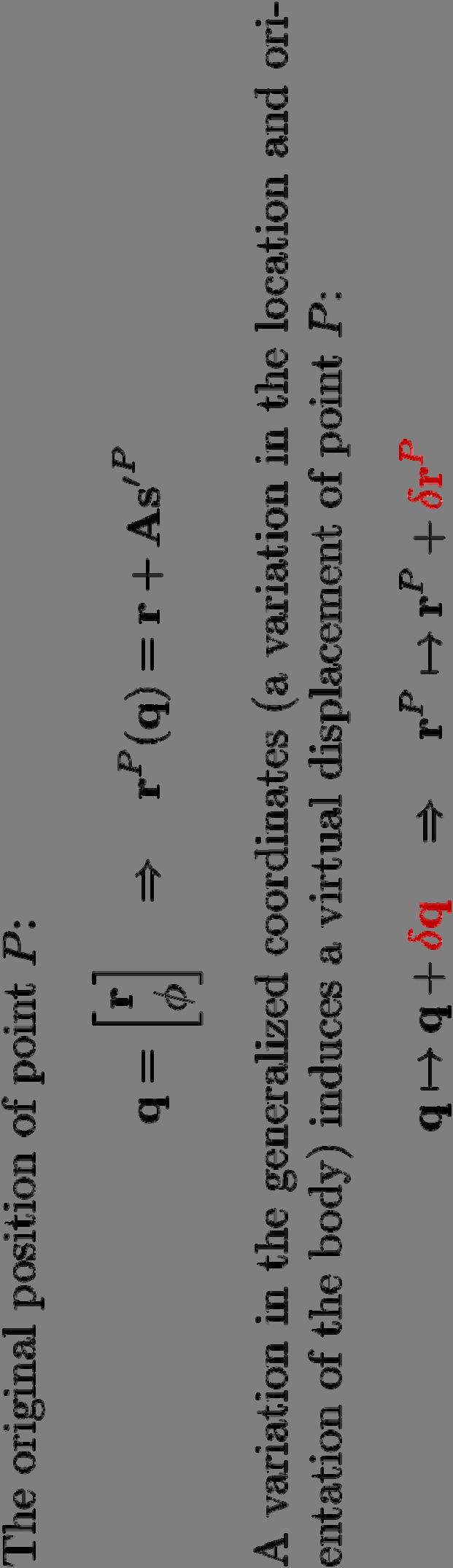
19 Calculus of Variations in ME451 [important slide to understand] 19 In our case we are interested in changes in kinematic quantities (locations of a point P, of the orientation matrix A, etc.) due to variations in the location and orientation of a body Variation in location of the LRF: Variation in orientation of the LRF: As far as the change of orientation matrix is concerned, using the result stated a couple of slides ago, we have that a variation in the orientation leads to the following variation in :


20 Change in A due to small variation in [another take]
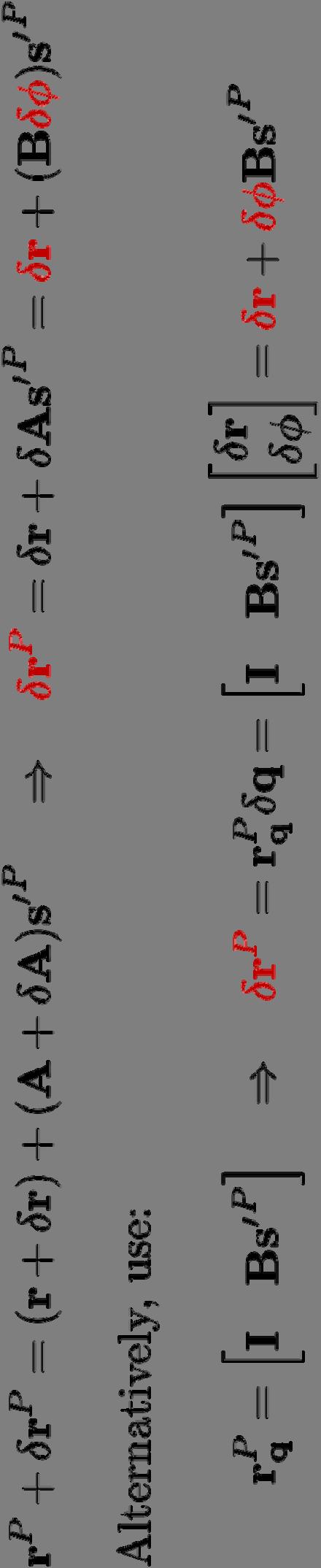
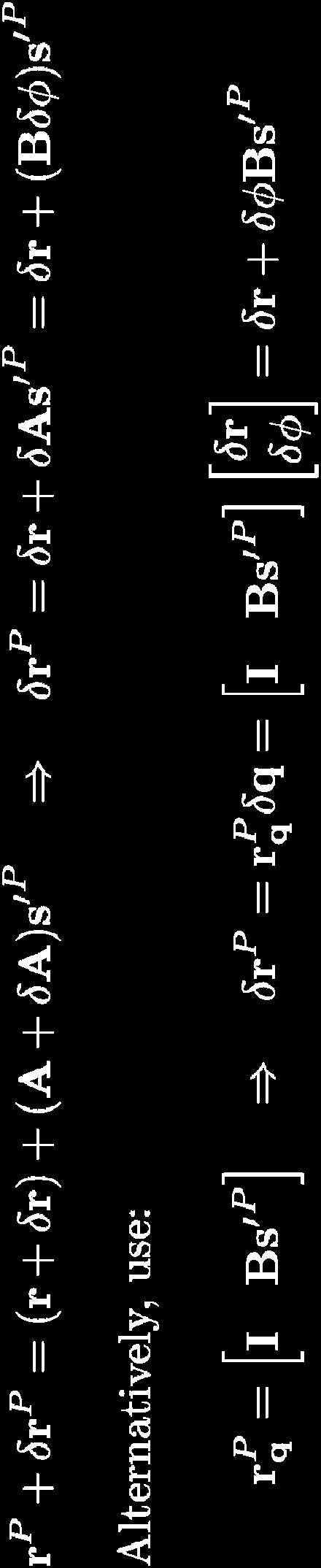
21 Virtual Displacement of a Point Attached to a Rigid Body 21
22 6.1.1 Variational EOM for a Single Rigid Body

23 Newton s Laws of Motion 23 1 st Law Every body perseveres in its state of being at rest or of moving uniformly straight forward, except insofar as it is compelled to change its state by forces impressed. 2 nd Law A change in motion is proportional to the motive force impressed and takes place along the straight line in which that force is impressed. 3 rd Law To any action there is always an opposite and equal reaction; in other words, the actions of two bodies upon each other are always equal and always opposite in direction. Newton s laws are applied to particles (idealized single point masses) only hold in inertial frames are valid only for non-relativistic speeds Isaac Newton ( )
24 Body as a Collection of Particles 24 Our toolbox provides a relationship between forces and accelerations (Newton s 2 nd law) but that applies for particles only How do we go from particles to bodies? Look at a body as a collection of infinitesimal particles Consider a differential mass at each point on the body (located by ) For each such particle, we can write What forces should we include? Distributed forces Internal interaction forces, between any two points on the body Concentrated (point) forces
25 Three Types of Forces Acting on a Differential Mass dm(p) 25 1) External distributed forces Described using a force per unit mass : This type of force is not common in classical multibody dynamics One exception: gravitational forces for which 2) Applied (external) forces Concentrated at point For now, we ignore them and revisit later 3) Internal interaction forces Act between point and any other point on the body, described using a force per units of mass at points and Including the contribution at point of all points on the body
26 Newton s EOM for a Differential Mass dm(p) 26 Apply Newton s 2 nd law to the differential mass located at point P: This represents a valid way of characterizing the motion of a body: describe the motion of every single particle that makes up that body However Differential equation above involves the internal forces acting within the body These are difficult to completely describe Their number is enormous Idea: simplify these equations taking advantage of the rigid body assumption


27 The Rigid Body Model 27 In the rigid body model, the distance between any pair of points in/on the body is constant: The internal forces, on due to the differential mass, on due to the differential mass satisfy the following conditions: They act along the line connecting points and They are equal in magnitude, opposite in direction, and collinear
28 The Rigid Body Assumption: Consequences 28 The distance between any two points and on a rigid body is constant in time: and therefore The internal force, acts along the line between and and therefore is also orthogonal to :

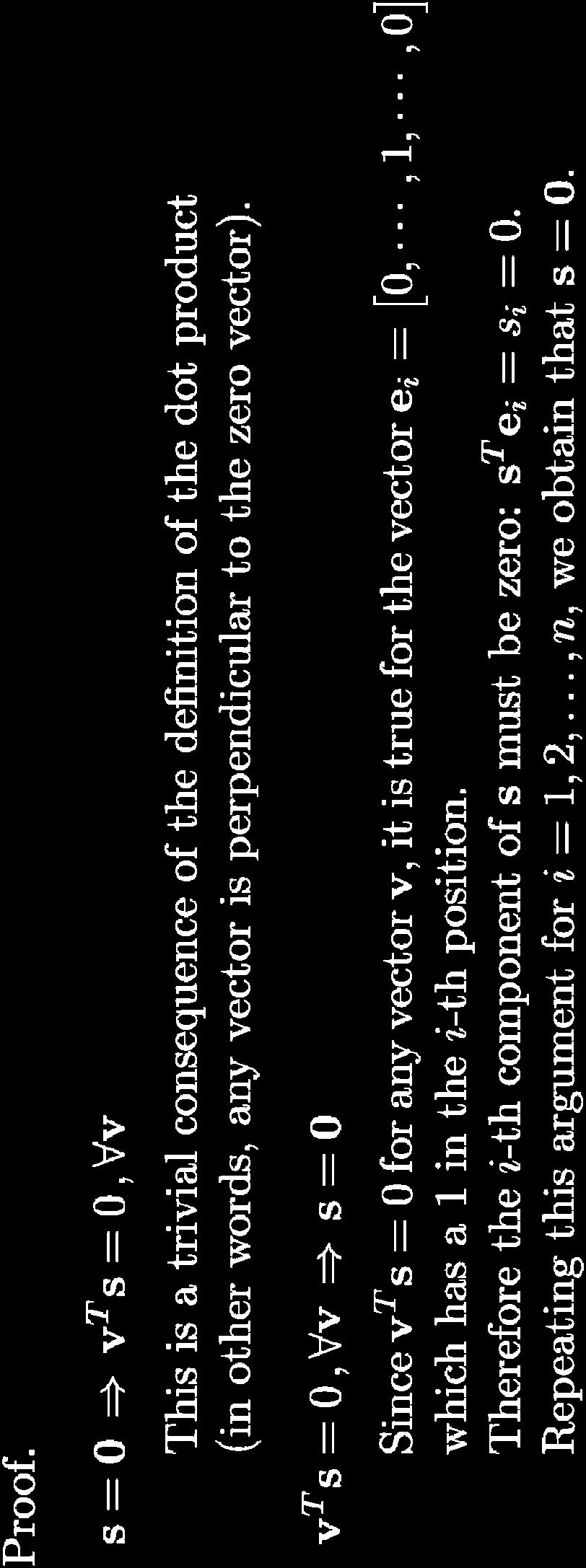
29 [Side Trip] An Orthogonality Theorem 29
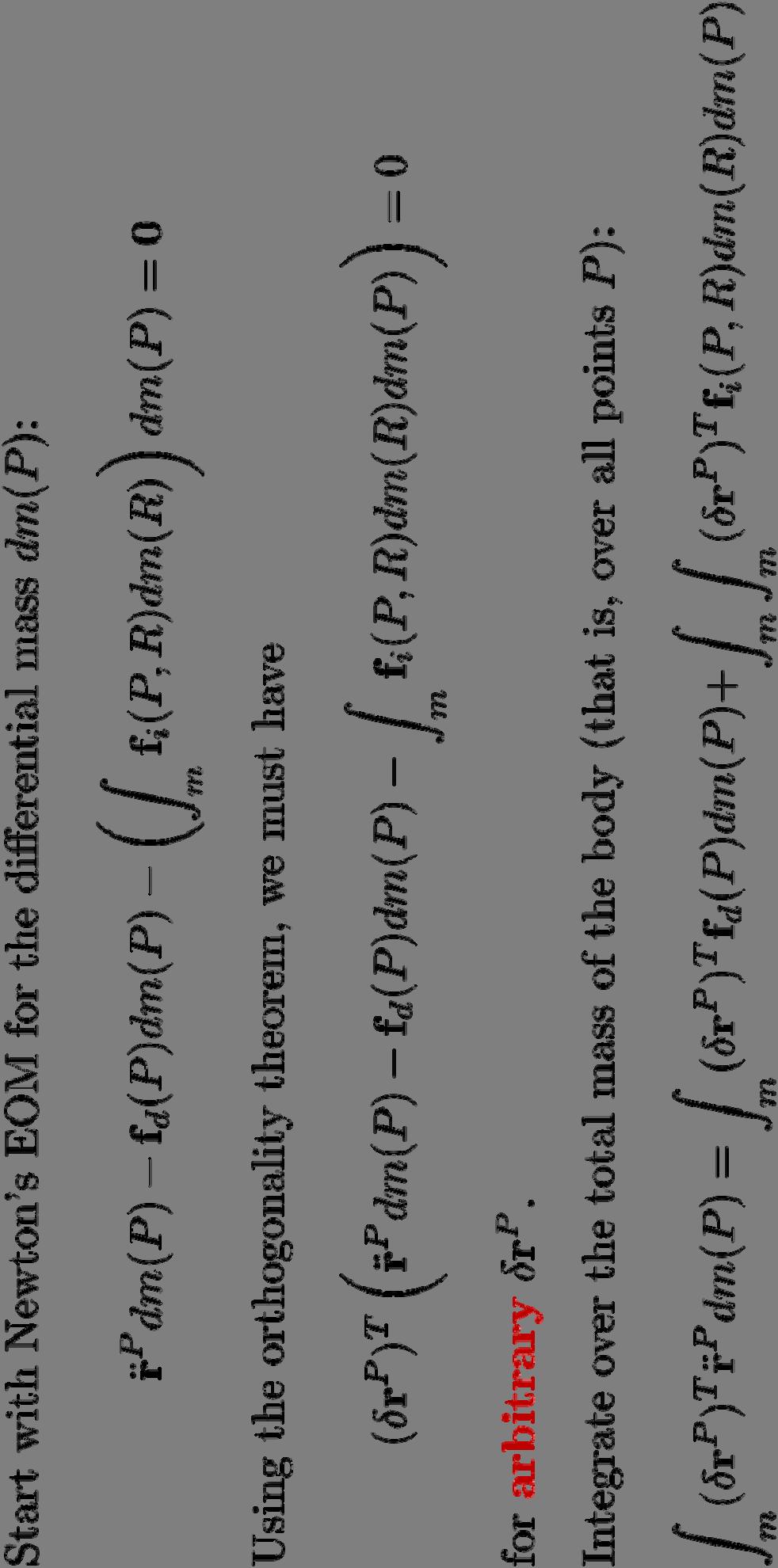

30 Variational EOM for a Rigid Body (1) 30




31 Variational EOM for a Rigid Body (2) 31
![[Side Trip]](/docs-images/78/78413612/images/32-0.jpg "D Alembert s")
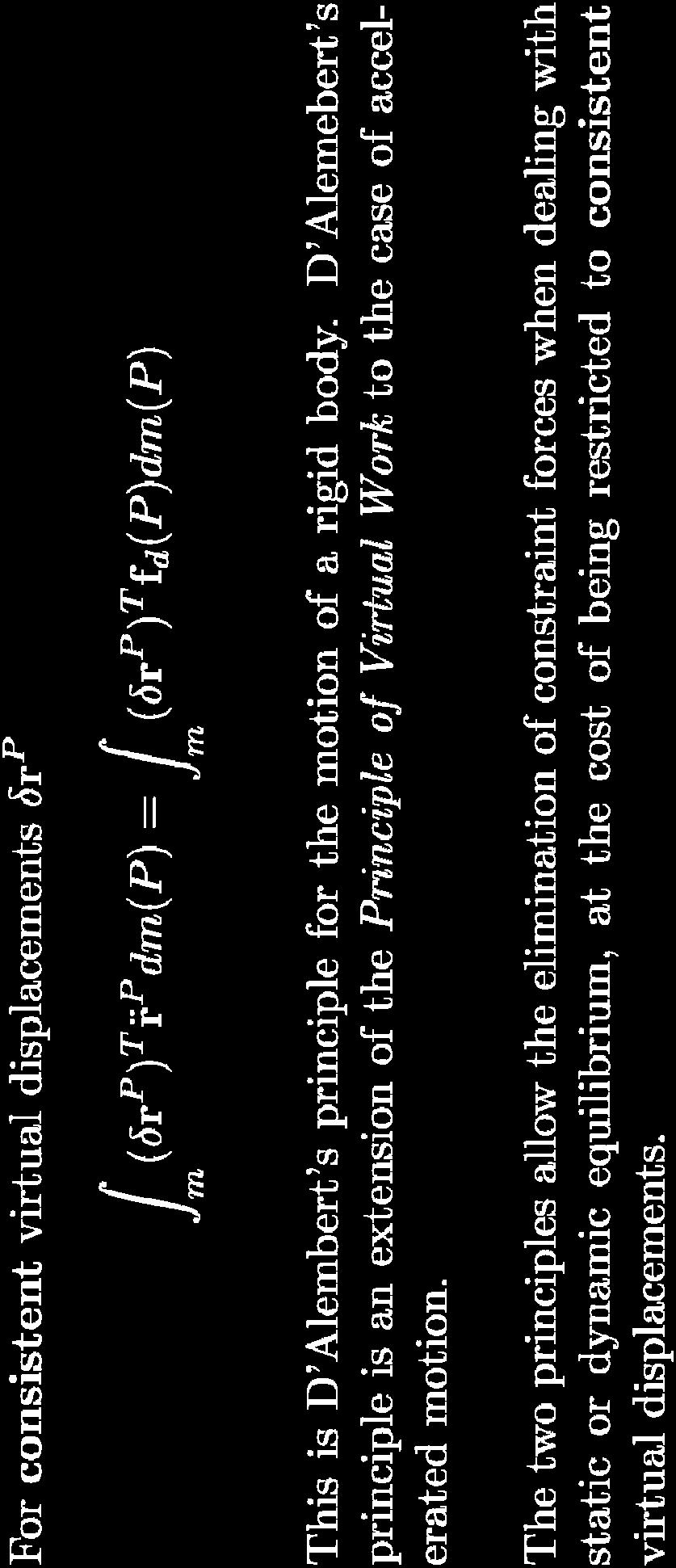

32 [Side Trip] D Alembert s Principle 32 Jean-Baptiste d Alembert ( )




33 [Side Trip] PVW: Simple Statics Example 33
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 6, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: I have never let my schooling
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 6, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: I have never let my schooling
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 11, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Noise makes little good; good
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 11, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Noise makes little good; good
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.3.4, 6.6 November 25, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Marge, don't discourage
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.3.4, 6.6 November 25, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Marge, don't discourage
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
ME751 Advanced Computational Multibody Dynamics. September 14, 2016
 ME751 Advanced Computational Multibody Dynamics September 14, 2016 Quote of the Day My own business always bores me to death; I prefer other people's. -- Oscar Wilde 2 Looking Ahead, Friday Need to wrap
ME751 Advanced Computational Multibody Dynamics September 14, 2016 Quote of the Day My own business always bores me to death; I prefer other people's. -- Oscar Wilde 2 Looking Ahead, Friday Need to wrap
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction September 2, 2010 Dan Negrut, 2010 ME451, UW-Madison Dan Negrut University of Wisconsin, Madison Before we get started Today: Discuss Syllabus
ME451 Kinematics and Dynamics of Machine Systems Introduction September 2, 2010 Dan Negrut, 2010 ME451, UW-Madison Dan Negrut University of Wisconsin, Madison Before we get started Today: Discuss Syllabus
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction September 4, 2014 Dan Negrut University of Wisconsin-Madison Quote of the day: "History will be kind to me for I intend to write it -Winston
ME451 Kinematics and Dynamics of Machine Systems Introduction September 4, 2014 Dan Negrut University of Wisconsin-Madison Quote of the day: "History will be kind to me for I intend to write it -Winston
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics October 7, 2016 Dan Negrut University of Wisconsin-Madison Quotes of the Day [from Samuel] There will come a time when you believe everything is finished.
ME751 Advanced Computational Multibody Dynamics October 7, 2016 Dan Negrut University of Wisconsin-Madison Quotes of the Day [from Samuel] There will come a time when you believe everything is finished.
General Theoretical Concepts Related to Multibody Dynamics
 General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Section 9.2 September 16, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day I only believe in statistics that I doctored myself. -- Sir Winston
ME751 Advanced Computational Multibody Dynamics Section 9.2 September 16, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day I only believe in statistics that I doctored myself. -- Sir Winston
Introduction MEAM 535. What is MEAM 535? Audience. Advanced topics in dynamics
 What is MEAM 535? Advanced topics in dynamics Audience Review of Newtonian mechanics MEAM 535 Introduction Analytical mechanics: Lagrangian and Hamiltonian Special topics: Stability of dynamical systems,
What is MEAM 535? Advanced topics in dynamics Audience Review of Newtonian mechanics MEAM 535 Introduction Analytical mechanics: Lagrangian and Hamiltonian Special topics: Stability of dynamical systems,
Video 2.1a Vijay Kumar and Ani Hsieh
 Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
SPRING SEMESTER AE 262 DYNAMICS. (02) Dr. Yavuz YAMAN
 Dr. Yavuz YAMAN") 2012-2013 SPRING SEMESTER AE 262 DYNAMICS INSTRUCTOR (01) Dr. Yavuz YAMAN (02) Dr. Yavuz YAMAN TEXTBOOK Vector Mechanics for Engineers DYNAMICS F.P. Beer, E.R. Johnston Jr. and W.E. Clausen Eighth Edition
2012-2013 SPRING SEMESTER AE 262 DYNAMICS INSTRUCTOR (01) Dr. Yavuz YAMAN (02) Dr. Yavuz YAMAN TEXTBOOK Vector Mechanics for Engineers DYNAMICS F.P. Beer, E.R. Johnston Jr. and W.E. Clausen Eighth Edition
Physics 351 Wednesday, January 10, 2018
 Physics 351 Wednesday, January 10, 2018 Chapers 1 5 mostly review freshman physics, so we ll go through them very quickly in the first few days of class. Read Chapters 1+2 for Friday. Read Chapter 3 (momentum
Physics 351 Wednesday, January 10, 2018 Chapers 1 5 mostly review freshman physics, so we ll go through them very quickly in the first few days of class. Read Chapters 1+2 for Friday. Read Chapter 3 (momentum
Modesto Junior College Course Outline of Record PHYS 101
 Modesto Junior College Course Outline of Record PHYS 101 I. OVERVIEW The following information will appear in the 2011-2012 catalog PHYS 101 General Physics: Mechanics 5 Units Prerequisite: Satisfactory
Modesto Junior College Course Outline of Record PHYS 101 I. OVERVIEW The following information will appear in the 2011-2012 catalog PHYS 101 General Physics: Mechanics 5 Units Prerequisite: Satisfactory
 2018 SPRING PHYS 8011 Classical mechanics I (as of Apr. 19/2018) The course syllabus is a general plan for the course; deviations announced to the class by the instructor may be necessary. A FRIENDLY REMINDER:
2018 SPRING PHYS 8011 Classical mechanics I (as of Apr. 19/2018) The course syllabus is a general plan for the course; deviations announced to the class by the instructor may be necessary. A FRIENDLY REMINDER:
PHYSICS 206, Spring 2019
 PHYSICS 206, Spring 2019 Instructor: Gregory Christian Lecture times: TR 9:35 10:50, room MPHY 203 Office: MIST M320 Phone: 979-845-1411 Email: gchristian@tamu.edu Homepage: http://faculty.physics.tamu.edu/christian/teaching.html
PHYSICS 206, Spring 2019 Instructor: Gregory Christian Lecture times: TR 9:35 10:50, room MPHY 203 Office: MIST M320 Phone: 979-845-1411 Email: gchristian@tamu.edu Homepage: http://faculty.physics.tamu.edu/christian/teaching.html
Course Review. Physics 2210 Fall Semester 2014
 Course Review Physics 2210 Fall Semester 2014 Announcements Unit 21 Simple and Physical Pendula (Nov 24th) HW Due 11/25th as usual No new material Wednesday November 26th. In-class discussion of problems
Course Review Physics 2210 Fall Semester 2014 Announcements Unit 21 Simple and Physical Pendula (Nov 24th) HW Due 11/25th as usual No new material Wednesday November 26th. In-class discussion of problems
(Refer Slide Time: 0:16)
") Engineering Mechanics Professor Manoj K Harbola Department of Physics Indian Institute of Technology Kanpur Module 1 Lecture No 01 Introduction to vectors (Refer Slide Time: 0:16) This is a course on engineering
Engineering Mechanics Professor Manoj K Harbola Department of Physics Indian Institute of Technology Kanpur Module 1 Lecture No 01 Introduction to vectors (Refer Slide Time: 0:16) This is a course on engineering
STATICS & DYNAMICS. Engineering Mechanics. Gary L. Gray. Francesco Costanzo. Michael E. Plesha. University of Wisconsin-Madison
 Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
Physics 321 Theoretical Mechanics I. University of Arizona Fall 2004 Prof. Erich W. Varnes
 Physics 321 Theoretical Mechanics I University of Arizona Fall 2004 Prof. Erich W. Varnes Contacting me Administrative Matters I will hold office hours on Tuesday from 1-3 pm Room 420K in the PAS building
Physics 321 Theoretical Mechanics I University of Arizona Fall 2004 Prof. Erich W. Varnes Contacting me Administrative Matters I will hold office hours on Tuesday from 1-3 pm Room 420K in the PAS building
Physics 351 Wednesday, January 14, 2015
 Physics 351 Wednesday, January 14, 2015 Read Chapter 1 for today. Two-thirds of you answered the Chapter 1 questions so far. Read Chapters 2+3 for Friday. Skim Chapter 4 for next Wednesday (1/21). Homework
Physics 351 Wednesday, January 14, 2015 Read Chapter 1 for today. Two-thirds of you answered the Chapter 1 questions so far. Read Chapters 2+3 for Friday. Skim Chapter 4 for next Wednesday (1/21). Homework
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Cam-Follower Constraints 3.3 Driving Constraints 3.5 October 11, 2011 Dan Negrut, 2011 ME451, UW-Madison "Computers are useless. They can only give you
ME451 Kinematics and Dynamics of Machine Systems Cam-Follower Constraints 3.3 Driving Constraints 3.5 October 11, 2011 Dan Negrut, 2011 ME451, UW-Madison "Computers are useless. They can only give you
Fall 2014: PHYSICS 170 GENERAL PHYSICS I
 Fall 2014: PHYSICS 170 GENERAL PHYSICS I MTWF 9:30-10:20 am (Section 1) WAT 420 Instructor: Milincic Radovan (milincic@hawaii.edu) Office hours (tentative): MW 10:25 11:30 PSB 204 Course description: This
Fall 2014: PHYSICS 170 GENERAL PHYSICS I MTWF 9:30-10:20 am (Section 1) WAT 420 Instructor: Milincic Radovan (milincic@hawaii.edu) Office hours (tentative): MW 10:25 11:30 PSB 204 Course description: This
Advanced Mechanics PHY 504 Fall Semester, 2016 (Revised 08/24/16) The Course will meet MWF in CP183, 9:00-9:50 a.m., beginning August 24, 2016.
 The Course will meet MWF in CP183, 9:00-9:50 a.m., beginning August 24, 2016.") Advanced Mechanics PHY 504 Fall Semester, 2016 (Revised 08/24/16) I. INSTRUCTOR/VENUE Professor Lance De Long Email: lance.delong@uky.edu Office: CP363 (257-4775) Labs: CP75, CP158 (257-8883) Office Hours:
Advanced Mechanics PHY 504 Fall Semester, 2016 (Revised 08/24/16) I. INSTRUCTOR/VENUE Professor Lance De Long Email: lance.delong@uky.edu Office: CP363 (257-4775) Labs: CP75, CP158 (257-8883) Office Hours:
Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay. Lecture - 1 Introduction
 Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1 Introduction Hello, I am Pradipta Banerji from the department of civil engineering,
Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1 Introduction Hello, I am Pradipta Banerji from the department of civil engineering,
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Newton-Raphson Method 4.5 Closing remarks, Kinematics Analysis October 25, 2010 Dan Negrut, 2011 ME451, UW-Madison Success is going from failure to failure
ME451 Kinematics and Dynamics of Machine Systems Newton-Raphson Method 4.5 Closing remarks, Kinematics Analysis October 25, 2010 Dan Negrut, 2011 ME451, UW-Madison Success is going from failure to failure
Course syllabus Engineering Mechanics - Dynamics
 Course syllabus Engineering Mechanics - Dynamics COURSE DETAILS Type of study programme Study programme Course title Course code ECTS (Number of credits allocated) Course status Year of study Course Web
Course syllabus Engineering Mechanics - Dynamics COURSE DETAILS Type of study programme Study programme Course title Course code ECTS (Number of credits allocated) Course status Year of study Course Web
Introduction to Engineering Analysis - ENGR1100 Course Description and Syllabus Tuesday / Friday Sections. Spring '13.
 Introduction to Engineering Analysis - ENGR1100 Course Description and Syllabus Tuesday / Friday Sections Spring 2013 Back exams, HW solutions, and other useful links can be found at the following website:
Introduction to Engineering Analysis - ENGR1100 Course Description and Syllabus Tuesday / Friday Sections Spring 2013 Back exams, HW solutions, and other useful links can be found at the following website:
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Review: Elements of Linear Algebra & Calculus September 9, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day If you can't convince them, confuse
ME751 Advanced Computational Multibody Dynamics Review: Elements of Linear Algebra & Calculus September 9, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day If you can't convince them, confuse
CENTRAL TEXAS COLLEGE SYLLABUS FOR ENGR 2301 Engineering Mechanics - Statics. Semester Hours Credit: 3
 CENTRAL TEXAS COLLEGE SYLLABUS FOR ENGR 2301 Engineering Mechanics - Statics Semester Hours Credit: 3 I. INTRODUCTION A. ENGR 2301, Engineering Mechanics Statics, is a three-semester hour course that is
CENTRAL TEXAS COLLEGE SYLLABUS FOR ENGR 2301 Engineering Mechanics - Statics Semester Hours Credit: 3 I. INTRODUCTION A. ENGR 2301, Engineering Mechanics Statics, is a three-semester hour course that is
41514 Dynamics of Machinery
 41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar (Iumár) Ferreira Santos 1. Course Structure 2. Objectives 3. Theoretical and Experimental Example 4. Industrial
41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar (Iumár) Ferreira Santos 1. Course Structure 2. Objectives 3. Theoretical and Experimental Example 4. Industrial
41514 Dynamics of Machinery
 41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
Welcome. to Physics 2135.
 Welcome to Physics 2135. PHYSICS 2135 Engineering Physics II Dr. S. Thomas Vojta Instructor in charge Office: 204 Physics, Phone: 341-4793 vojtat@mst.edu www.mst.edu/~vojtat Office hours: Mon+ Wed 11am-12pm
Welcome to Physics 2135. PHYSICS 2135 Engineering Physics II Dr. S. Thomas Vojta Instructor in charge Office: 204 Physics, Phone: 341-4793 vojtat@mst.edu www.mst.edu/~vojtat Office hours: Mon+ Wed 11am-12pm
San José State University Aerospace Engineering Department AE138: Vector Based Dynamics for Aerospace Applications Fall 2018
 San José State University Aerospace Engineering Department AE138: Vector Based Dynamics for Aerospace Applications Fall 2018 Instructor: Office Location: Email: Office Hours: Class Days/Time: Prerequisite:
San José State University Aerospace Engineering Department AE138: Vector Based Dynamics for Aerospace Applications Fall 2018 Instructor: Office Location: Email: Office Hours: Class Days/Time: Prerequisite:
PHYSICS 100. Introduction to Physics. Bridges the gap between school science and Physics 101, Physics 120, Physics 125 or Physics 140
 PHYSICS 100 Introduction to Physics Bridges the gap between school science and Physics 101, Physics 120, Physics 125 or Physics 140 Only for those WITHOUT Physics 12 or equiv. (C+ or better). If you have
PHYSICS 100 Introduction to Physics Bridges the gap between school science and Physics 101, Physics 120, Physics 125 or Physics 140 Only for those WITHOUT Physics 12 or equiv. (C+ or better). If you have
Assignments VIII and IX, PHYS 301 (Classical Mechanics) Spring 2014 Due 3/21/14 at start of class
 Spring 2014 Due 3/21/14 at start of class") Assignments VIII and IX, PHYS 301 (Classical Mechanics) Spring 2014 Due 3/21/14 at start of class Homeworks VIII and IX both center on Lagrangian mechanics and involve many of the same skills. Therefore,
Assignments VIII and IX, PHYS 301 (Classical Mechanics) Spring 2014 Due 3/21/14 at start of class Homeworks VIII and IX both center on Lagrangian mechanics and involve many of the same skills. Therefore,
Physical Dynamics (PHY-304)
") Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
Approach based on Cartesian coordinates
 GraSMech course 2005-2006 Computer-aided analysis of rigid and flexible multibody systems Approach based on Cartesian coordinates Prof. O. Verlinden Faculté polytechnique de Mons Olivier.Verlinden@fpms.ac.be
GraSMech course 2005-2006 Computer-aided analysis of rigid and flexible multibody systems Approach based on Cartesian coordinates Prof. O. Verlinden Faculté polytechnique de Mons Olivier.Verlinden@fpms.ac.be
Lecture 22: Harmonic Waves. Physics 2210 Fall Semester 2014
 Lecture 22: Harmonic Waves Physics 2210 Fall Semester 2014 Announcements Unit 21 Simple and Physical Pendula (Nov 24th ) HW Due 11/25 th as usual No new material Wednesday November 26th. In-class discussion
Lecture 22: Harmonic Waves Physics 2210 Fall Semester 2014 Announcements Unit 21 Simple and Physical Pendula (Nov 24th ) HW Due 11/25 th as usual No new material Wednesday November 26th. In-class discussion
ENGR 3130: DYNAMICS University of Detroit Mercy Term I,
 ENGR 3130: DYNAMICS University of Detroit Mercy Term I, 2013-2014 Course Description: The application of kinematics and kinetics to particles and rigid bodies. The course considers fixed and moving reference
ENGR 3130: DYNAMICS University of Detroit Mercy Term I, 2013-2014 Course Description: The application of kinematics and kinetics to particles and rigid bodies. The course considers fixed and moving reference
Torque and Rotation Lecture 7
 Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
SYLLABUS FORM WESTCHESTER COMMUNITY COLLEGE Valhalla, NY lo595. l. Course #: PHYSC NAME OF ORIGINATOR /REVISOR: ALENA O CONNOR
 SYLLABUS FORM WESTCHESTER COMMUNITY COLLEGE Valhalla, NY lo595 l. Course #: PHYSC 121 2. NAME OF ORIGINATOR /REVISOR: ALENA O CONNOR NAME OF COURSE ENGINEERING PHYSICS 1 WITH LAB 3. CURRENT DATE: SUMMER
SYLLABUS FORM WESTCHESTER COMMUNITY COLLEGE Valhalla, NY lo595 l. Course #: PHYSC 121 2. NAME OF ORIGINATOR /REVISOR: ALENA O CONNOR NAME OF COURSE ENGINEERING PHYSICS 1 WITH LAB 3. CURRENT DATE: SUMMER
Honors Physics 1 for Scientists and Engineers
 Honors Physics 1 for Scientists and Engineers Physics 0475, University of Pittsburgh (Fall 2017) Syllabus Course Information Meeting Time: Mon, Tue, Wed, Thu, Fri: 11:00-11:50 AM Thaw Hall 102 Instructor
Honors Physics 1 for Scientists and Engineers Physics 0475, University of Pittsburgh (Fall 2017) Syllabus Course Information Meeting Time: Mon, Tue, Wed, Thu, Fri: 11:00-11:50 AM Thaw Hall 102 Instructor
Welcome to Physics 161 Elements of Physics Fall 2018, Sept 4. Wim Kloet
 Welcome to Physics 161 Elements of Physics Fall 2018, Sept 4 Wim Kloet 1 Lecture 1 TOPICS Administration - course web page - contact details Course materials - text book - iclicker - syllabus Course Components
Welcome to Physics 161 Elements of Physics Fall 2018, Sept 4 Wim Kloet 1 Lecture 1 TOPICS Administration - course web page - contact details Course materials - text book - iclicker - syllabus Course Components
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics October 24, 2016 Antonio Recuero University of Wisconsin-Madison Quote of the Day If a cluttered desk is a sign of a cluttered mind, of what, then, is an
ME751 Advanced Computational Multibody Dynamics October 24, 2016 Antonio Recuero University of Wisconsin-Madison Quote of the Day If a cluttered desk is a sign of a cluttered mind, of what, then, is an
Two Hanging Masses. ) by considering just the forces that act on it. Use Newton's 2nd law while
 by considering just the forces that act on it. Use Newton's 2nd law while") Student View Summary View Diagnostics View Print View with Answers Edit Assignment Settings per Student Exam 2 - Forces [ Print ] Due: 11:59pm on Tuesday, November 1, 2011 Note: To underst how points are
Student View Summary View Diagnostics View Print View with Answers Edit Assignment Settings per Student Exam 2 - Forces [ Print ] Due: 11:59pm on Tuesday, November 1, 2011 Note: To underst how points are
*Definition of Mechanics *Basic Concepts *Newton s Laws *Units
 INTRODUCTION *Definition of Mechanics *Basic Concepts *Newton s Laws *Units Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under
INTRODUCTION *Definition of Mechanics *Basic Concepts *Newton s Laws *Units Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under
COLLEGE OF THE DESERT
 COLLEGE OF THE DESERT Course Code ENGR-011 Course Outline of Record 1. Course Code: ENGR-011 2. a. Long Course Title: Statics b. Short Course Title: STATICS 3. a. Catalog Course Description: This course
COLLEGE OF THE DESERT Course Code ENGR-011 Course Outline of Record 1. Course Code: ENGR-011 2. a. Long Course Title: Statics b. Short Course Title: STATICS 3. a. Catalog Course Description: This course
Lake-Sumter State College Course Syllabus. South Lake Building 2 Room 339
 Lake-Sumter State College Course Syllabus Course / Prefix Number MAC 2313 Course Title: Calculus with Analytic Geometry III CRN: 20110 20110 Credit: 4 Term: Spring 2015 Course Catalog Description: Instructor:
Lake-Sumter State College Course Syllabus Course / Prefix Number MAC 2313 Course Title: Calculus with Analytic Geometry III CRN: 20110 20110 Credit: 4 Term: Spring 2015 Course Catalog Description: Instructor:
Lecture «Robot Dynamics»: Dynamics and Control
 Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
FINAL EXAM GROUND RULES
 PHYSICS 507 Fall 2011 FINAL EXAM Room: ARC-108 Time: Wednesday, December 21, 10am-1pm GROUND RULES There are four problems based on the above-listed material. Closed book Closed notes Partial credit will
PHYSICS 507 Fall 2011 FINAL EXAM Room: ARC-108 Time: Wednesday, December 21, 10am-1pm GROUND RULES There are four problems based on the above-listed material. Closed book Closed notes Partial credit will
Virtual Work and Variational Principles
 Virtual Work and Principles Mathematically, the structural analysis problem is a boundary value problem (BVP). Forces, displacements, stresses, and strains are connected and computed within the framework
Virtual Work and Principles Mathematically, the structural analysis problem is a boundary value problem (BVP). Forces, displacements, stresses, and strains are connected and computed within the framework
Announcements. l Register your iclicker on LON-CAPA. l First exam: Feb 6 in Life Sciences A133
 Announcements l LON-CAPA #1 and Mastering Physics 1+2 due next Tuesday help room hours (Strosacker Help Room, 1248 BPS): M: 5-8 PM W: 5-8 PM F: 2-6 PM l Guest lecturer next Tuesday l Register for Mastering
Announcements l LON-CAPA #1 and Mastering Physics 1+2 due next Tuesday help room hours (Strosacker Help Room, 1248 BPS): M: 5-8 PM W: 5-8 PM F: 2-6 PM l Guest lecturer next Tuesday l Register for Mastering
Course Syllabus for CIVL 2110 STATICS Spring
 Course Syllabus for CIVL 2110 STATICS Spring 2016-2017 Instructor: email: ilias@ust.hk Dr. Ilias DIMITRAKOPOULOS room: 3583 tel: 2358-5975: office hours Wed, Fri: 11:00-12:00 Lectures: Wed, Fri 16:30-18:00
Course Syllabus for CIVL 2110 STATICS Spring 2016-2017 Instructor: email: ilias@ust.hk Dr. Ilias DIMITRAKOPOULOS room: 3583 tel: 2358-5975: office hours Wed, Fri: 11:00-12:00 Lectures: Wed, Fri 16:30-18:00
Newton s laws. Chapter 1. Not: Quantum Mechanics / Relativistic Mechanics
 PHYB54 Revision Chapter 1 Newton s laws Not: Quantum Mechanics / Relativistic Mechanics Isaac Newton 1642-1727 Classical mechanics breaks down if: 1) high speed, v ~ c 2) microscopic/elementary particles
PHYB54 Revision Chapter 1 Newton s laws Not: Quantum Mechanics / Relativistic Mechanics Isaac Newton 1642-1727 Classical mechanics breaks down if: 1) high speed, v ~ c 2) microscopic/elementary particles
PH 610/710-2A: Advanced Classical Mechanics I. Fall Semester 2007
 PH 610/710-2A: Advanced Classical Mechanics I Fall Semester 2007 Time and location: Tuesdays & Thursdays 8:00am 9:15am (EB 144) Instructor and office hours: Dr. Renato Camata, camata@uab.edu CH 306, (205)
PH 610/710-2A: Advanced Classical Mechanics I Fall Semester 2007 Time and location: Tuesdays & Thursdays 8:00am 9:15am (EB 144) Instructor and office hours: Dr. Renato Camata, camata@uab.edu CH 306, (205)
Review for Final. elementary mechanics. Lagrangian and Hamiltonian Dynamics. oscillations
 Review for Final elementary mechanics Newtonian mechanics gravitation dynamics of systems of particles Lagrangian and Hamiltonian Dynamics Lagrangian mechanics Variational dynamics Hamiltonian dynamics
Review for Final elementary mechanics Newtonian mechanics gravitation dynamics of systems of particles Lagrangian and Hamiltonian Dynamics Lagrangian mechanics Variational dynamics Hamiltonian dynamics
STATICS SECOND EDITION
 Engineering Mechanics STATICS SECOND EDITION Michael E. Plesha Department of Engineering Physics University of Wisconsin-Madison Gary L. Gray Department of Engineering Science and Mechanics Penn State
Engineering Mechanics STATICS SECOND EDITION Michael E. Plesha Department of Engineering Physics University of Wisconsin-Madison Gary L. Gray Department of Engineering Science and Mechanics Penn State
Introduction to Engineering Analysis - ENGR1100 Course Description and Syllabus Monday / Thursday Sections. Fall '10.
 Introduction to Engineering Analysis - ENGR1100 Course Description and Syllabus Monday / Thursday Sections Fall 2010 All course materials are available on the RPI Learning Management System (LMS) website.
Introduction to Engineering Analysis - ENGR1100 Course Description and Syllabus Monday / Thursday Sections Fall 2010 All course materials are available on the RPI Learning Management System (LMS) website.
Advanced Dynamics. - Lecture 4 Lagrange Equations. Paolo Tiso Spring Semester 2017 ETH Zürich
 Advanced Dynamics - Lecture 4 Lagrange Equations Paolo Tiso Spring Semester 2017 ETH Zürich LECTURE OBJECTIVES 1. Derive the Lagrange equations of a system of particles; 2. Show that the equation of motion
Advanced Dynamics - Lecture 4 Lagrange Equations Paolo Tiso Spring Semester 2017 ETH Zürich LECTURE OBJECTIVES 1. Derive the Lagrange equations of a system of particles; 2. Show that the equation of motion
Dynamics and control of mechanical systems
 Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
AN INTRODUCTION TO LAGRANGE EQUATIONS. Professor J. Kim Vandiver October 28, 2016
 AN INTRODUCTION TO LAGRANGE EQUATIONS Professor J. Kim Vandiver October 28, 2016 kimv@mit.edu 1.0 INTRODUCTION This paper is intended as a minimal introduction to the application of Lagrange equations
AN INTRODUCTION TO LAGRANGE EQUATIONS Professor J. Kim Vandiver October 28, 2016 kimv@mit.edu 1.0 INTRODUCTION This paper is intended as a minimal introduction to the application of Lagrange equations
Video 3.1 Vijay Kumar and Ani Hsieh
 Video 3.1 Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Dynamics of Robot Arms Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Lagrange s Equation of Motion Lagrangian Kinetic Energy Potential
Video 3.1 Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Dynamics of Robot Arms Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Lagrange s Equation of Motion Lagrangian Kinetic Energy Potential
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics November 2, 2016 Antonio Recuero University of Wisconsin-Madison Quotes of the Day The methods which I set forth do not require either constructions or geometrical
ME751 Advanced Computational Multibody Dynamics November 2, 2016 Antonio Recuero University of Wisconsin-Madison Quotes of the Day The methods which I set forth do not require either constructions or geometrical
Chapter 4 Statics and dynamics of rigid bodies
 Chapter 4 Statics and dynamics of rigid bodies Bachelor Program in AUTOMATION ENGINEERING Prof. Rong-yong Zhao (zhaorongyong@tongji.edu.cn) First Semester,2014-2015 Content of chapter 4 4.1 Static equilibrium
Chapter 4 Statics and dynamics of rigid bodies Bachelor Program in AUTOMATION ENGINEERING Prof. Rong-yong Zhao (zhaorongyong@tongji.edu.cn) First Semester,2014-2015 Content of chapter 4 4.1 Static equilibrium
Physics 100. Reminder: All lecture notes posted, after lecture, follow link at:
 Physics 100 Please pick up a clicker! Reminder: All lecture notes posted, after lecture, follow link at: http://www.hunter.cuny.edu/physics/courses/physics100/spring-2016 Note: Before the actual lecture,
Physics 100 Please pick up a clicker! Reminder: All lecture notes posted, after lecture, follow link at: http://www.hunter.cuny.edu/physics/courses/physics100/spring-2016 Note: Before the actual lecture,
Kinematics + Dynamics
 Exam I Physics 101: Lecture 04 Kinematics + Dynamics Today s lecture will cover Textbook Chapter 4 iclicker scores have been imported again please check! If you are new to the course, please read the course
Exam I Physics 101: Lecture 04 Kinematics + Dynamics Today s lecture will cover Textbook Chapter 4 iclicker scores have been imported again please check! If you are new to the course, please read the course
STATICS Chapter 1 Introductory Concepts
 Contents Preface to Adapted Edition... (v) Preface to Third Edition... (vii) List of Symbols and Abbreviations... (xi) PART - I STATICS Chapter 1 Introductory Concepts 1-1 Scope of Mechanics... 1 1-2 Preview
Contents Preface to Adapted Edition... (v) Preface to Third Edition... (vii) List of Symbols and Abbreviations... (xi) PART - I STATICS Chapter 1 Introductory Concepts 1-1 Scope of Mechanics... 1 1-2 Preview
The beginnings of physics
 The beginnings of physics Astronomy 101 Syracuse University, Fall 2018 Walter Freeman October 9, 2018 Astronomy 101 The beginnings of physics October 9, 2018 1 / 28 Announcements No office hours this week
The beginnings of physics Astronomy 101 Syracuse University, Fall 2018 Walter Freeman October 9, 2018 Astronomy 101 The beginnings of physics October 9, 2018 1 / 28 Announcements No office hours this week
STATE UNIVERSITY OF NEW YORK COLLEGE OF TECHNOLOGY CANTON, NEW YORK COURSE OUTLINE ENGS STATICS
 STATE UNIVERSITY OF NEW YORK COLLEGE OF TECHNOLOGY CANTON, NEW YORK COURSE OUTLINE PREPARED BY: ARTHUR HURLBUT, Ph.D. P.E.(October 2006) UPDATED BY: MICHAEL J. NEWTOWN, P.E. (October 2006) REVISED BY:
STATE UNIVERSITY OF NEW YORK COLLEGE OF TECHNOLOGY CANTON, NEW YORK COURSE OUTLINE PREPARED BY: ARTHUR HURLBUT, Ph.D. P.E.(October 2006) UPDATED BY: MICHAEL J. NEWTOWN, P.E. (October 2006) REVISED BY:
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
Dynamics of Physical System Prof. S. Banerjee Department of Electrical Engineering Indian Institute of Technology, Kharagpur
 Dynamics of Physical System Prof. S. Banerjee Department of Electrical Engineering Indian Institute of Technology, Kharagpur Lecture - 1 Introduction to System Elements One of the important elements of
Dynamics of Physical System Prof. S. Banerjee Department of Electrical Engineering Indian Institute of Technology, Kharagpur Lecture - 1 Introduction to System Elements One of the important elements of
Dynamics. describe the relationship between the joint actuator torques and the motion of the structure important role for
 Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
WEEK 1 Dynamics of Machinery
 WEEK 1 Dynamics of Machinery References Theory of Machines and Mechanisms, J.J. Uicker, G.R.Pennock ve J.E. Shigley, 2003 Makine Dinamiği, Prof. Dr. Eres SÖYLEMEZ, 2013 Uygulamalı Makine Dinamiği, Jeremy
WEEK 1 Dynamics of Machinery References Theory of Machines and Mechanisms, J.J. Uicker, G.R.Pennock ve J.E. Shigley, 2003 Makine Dinamiği, Prof. Dr. Eres SÖYLEMEZ, 2013 Uygulamalı Makine Dinamiği, Jeremy
Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras
 Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture 08 Vectors in a Plane, Scalars & Pseudoscalers Let us continue today with
Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture 08 Vectors in a Plane, Scalars & Pseudoscalers Let us continue today with
Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202)
") J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
Inverse differential kinematics Statics and force transformations
 Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
CHAPTER 1 INTRODUCTION
 CHAPTER 1 INTRODUCTION DEFINITION OF MECHANICS Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under the action of force systems.
CHAPTER 1 INTRODUCTION DEFINITION OF MECHANICS Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under the action of force systems.
Important Dates. Non-instructional days. No classes. College offices closed.
 Instructor: Dr. Alexander Krantsberg Email: akrantsberg@nvcc.edu Phone: 703-845-6548 Office: Bisdorf, Room AA 352 Class Time: Tuesdays and Thursdays 7:30 PM - 9:20 PM. Classroom: Bisdorf / AA 467 Office
Instructor: Dr. Alexander Krantsberg Email: akrantsberg@nvcc.edu Phone: 703-845-6548 Office: Bisdorf, Room AA 352 Class Time: Tuesdays and Thursdays 7:30 PM - 9:20 PM. Classroom: Bisdorf / AA 467 Office
Review for 3 rd Midterm
 Review for 3 rd Midterm Midterm is on 4/19 at 7:30pm in the same rooms as before You are allowed one double sided sheet of paper with any handwritten notes you like. The moment-of-inertia about the center-of-mass
Review for 3 rd Midterm Midterm is on 4/19 at 7:30pm in the same rooms as before You are allowed one double sided sheet of paper with any handwritten notes you like. The moment-of-inertia about the center-of-mass
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Physics 101: Lecture 15 Torque, F=ma for rotation, and Equilibrium
 Physics 101: Lecture 15 Torque, F=ma for rotation, and Equilibrium Strike (Day 10) Prelectures, checkpoints, lectures continue with no change. Take-home quizzes this week. See Elaine Schulte s email. HW
Physics 101: Lecture 15 Torque, F=ma for rotation, and Equilibrium Strike (Day 10) Prelectures, checkpoints, lectures continue with no change. Take-home quizzes this week. See Elaine Schulte s email. HW
Lecture 16 ME 231: Dynamics
 Kinematics of Particles (Ch. 2) Review Lecture 16 Question of the Day What is the most important concept in Chapter 2? Time Derivative of a Vector 2 Outline for Today Question of the day Where are we in
Kinematics of Particles (Ch. 2) Review Lecture 16 Question of the Day What is the most important concept in Chapter 2? Time Derivative of a Vector 2 Outline for Today Question of the day Where are we in
Welcome back to Physics 211
 Welcome back to Physics 211 Today s agenda: Rotations What s on the exam? Relative motion Physics 211 Fall 2012 Lecture 04-1 1 Assignments due this week: Prelecture 4-2: Ch 5.1-5.7 Complete short quiz
Welcome back to Physics 211 Today s agenda: Rotations What s on the exam? Relative motion Physics 211 Fall 2012 Lecture 04-1 1 Assignments due this week: Prelecture 4-2: Ch 5.1-5.7 Complete short quiz
Welcome to Physics 211! General Physics I
 Welcome to Physics 211! General Physics I Physics 211 Fall 2015 Lecture 01-1 1 Physics 215 Honors & Majors Are you interested in becoming a physics major? Do you have a strong background in physics and
Welcome to Physics 211! General Physics I Physics 211 Fall 2015 Lecture 01-1 1 Physics 215 Honors & Majors Are you interested in becoming a physics major? Do you have a strong background in physics and
Wednesday, 10 September 2008
 MA211 : Calculus, Part 1 Lecture 2: Sets and Functions Dr Niall Madden (Mathematics, NUI Galway) Wednesday, 10 September 2008 MA211 Lecture 2: Sets and Functions 1/33 Outline 1 Short review of sets 2 Sets
MA211 : Calculus, Part 1 Lecture 2: Sets and Functions Dr Niall Madden (Mathematics, NUI Galway) Wednesday, 10 September 2008 MA211 Lecture 2: Sets and Functions 1/33 Outline 1 Short review of sets 2 Sets
Outline. Wednesday, 10 September Schedule. Welcome to MA211. MA211 : Calculus, Part 1 Lecture 2: Sets and Functions
 Outline MA211 : Calculus, Part 1 Lecture 2: Sets and Functions Dr Niall Madden (Mathematics, NUI Galway) Wednesday, 10 September 2008 1 Short review of sets 2 The Naturals: N The Integers: Z The Rationals:
Outline MA211 : Calculus, Part 1 Lecture 2: Sets and Functions Dr Niall Madden (Mathematics, NUI Galway) Wednesday, 10 September 2008 1 Short review of sets 2 The Naturals: N The Integers: Z The Rationals:
What path do the longest sparks take after they leave the wand? Today we ll be doing one more new concept before the test on Wednesday.
 What path do the longest sparks take after they leave the wand? Today we ll be doing one more new concept before the test on Wednesday. Centripetal Acceleration and Newtonian Gravitation Reminders: 15
What path do the longest sparks take after they leave the wand? Today we ll be doing one more new concept before the test on Wednesday. Centripetal Acceleration and Newtonian Gravitation Reminders: 15
Fluid Mechanics Prof. S. K. Som Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Fluid Mechanics Prof. S. K. Som Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 15 Conservation Equations in Fluid Flow Part III Good afternoon. I welcome you all
Fluid Mechanics Prof. S. K. Som Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 15 Conservation Equations in Fluid Flow Part III Good afternoon. I welcome you all
Modesto Junior College Course Outline of Record PHYS 142
 Modesto Junior College Course Outline of Record PHYS 142 I. OVERVIEW The following information will appear in the 2011-2012 catalog PHYS 142 Mechanics, Heat, & Waves 5 Units Formerly listed as: PHYS -
Modesto Junior College Course Outline of Record PHYS 142 I. OVERVIEW The following information will appear in the 2011-2012 catalog PHYS 142 Mechanics, Heat, & Waves 5 Units Formerly listed as: PHYS -
PHY131H1F - Class 20. Today: Today, Chapter 13: General Periodic Oscillations. Special case: Simple Harmonic Motion
 Today: Today, Chapter 13: General Periodic Oscillations Special case: Simple Harmonic Motion PHY131H1F - Class 20 Animation from http://www.uni-saarland.de/fak7/knorr/homepages/patrick/theorex/maplescripts/oscillations/forced_oscillations1.html
Today: Today, Chapter 13: General Periodic Oscillations Special case: Simple Harmonic Motion PHY131H1F - Class 20 Animation from http://www.uni-saarland.de/fak7/knorr/homepages/patrick/theorex/maplescripts/oscillations/forced_oscillations1.html
INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad
 Dundigal, Hyderabad") INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 043 AERONAUTICAL ENGINEERING DEFINITIONS AND TERMINOLOGY Course Name : ENGINEERING MECHANICS Course Code : AAEB01 Program :
INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 043 AERONAUTICAL ENGINEERING DEFINITIONS AND TERMINOLOGY Course Name : ENGINEERING MECHANICS Course Code : AAEB01 Program :
Introduction to Dynamics
 Introduction to Dynamics Dynamics is that branch of mechanics which deals with the motion of bodies under the action of forces. Dynamics has two distinct parts: kinematics and kinetics. Kinematics is the
Introduction to Dynamics Dynamics is that branch of mechanics which deals with the motion of bodies under the action of forces. Dynamics has two distinct parts: kinematics and kinetics. Kinematics is the
CE261 ENGINEERING MECHANICS - DYNAMICS
 CE1 ENGINEERING MECHANICS - DYNAMICS Instructor JORGE A. RAMÍREZ, PH.D. ASSOCIATE PROFESSOR Water Resources, Hydrologic and Environmental Sciences Division Civil Engineering Department A Engineering Bldg.
CE1 ENGINEERING MECHANICS - DYNAMICS Instructor JORGE A. RAMÍREZ, PH.D. ASSOCIATE PROFESSOR Water Resources, Hydrologic and Environmental Sciences Division Civil Engineering Department A Engineering Bldg.
Matrix Method of Structural Analysis Prof. Amit Shaw Department of Civil Engineering Indian Institute of Technology, Kharagpur
 Matrix Method of Structural Analysis Prof. Amit Shaw Department of Civil Engineering Indian Institute of Technology, Kharagpur Lecture 01 Introduction Hello everyone, welcome to the online course on Matrix
Matrix Method of Structural Analysis Prof. Amit Shaw Department of Civil Engineering Indian Institute of Technology, Kharagpur Lecture 01 Introduction Hello everyone, welcome to the online course on Matrix
Morpheus: Neo, sooner or later you re going to realize, just as I did, that there s a difference between knowing the path, and walking the path.
 Morpheus: Neo, sooner or later you re going to realize, just as I did, that there s a difference between knowing the path, and walking the path. Why CS 53? Making linear algebra more concrete. Making it
Morpheus: Neo, sooner or later you re going to realize, just as I did, that there s a difference between knowing the path, and walking the path. Why CS 53? Making linear algebra more concrete. Making it
ME EN 3700: FLUID MECHANICS (Fall 2003)
") ME EN 3700: FLUID MECHANICS (Fall 2003) Lecturer: Eric R. Pardyjak Lecture: MTWThF 7:30am - 8:20am Room 104 EMCB Office Hours: (9:00am - 10:30am M W F, Room 169 KEN Website: http://www.mech.utah.edu/~pardyjak/
ME EN 3700: FLUID MECHANICS (Fall 2003) Lecturer: Eric R. Pardyjak Lecture: MTWThF 7:30am - 8:20am Room 104 EMCB Office Hours: (9:00am - 10:30am M W F, Room 169 KEN Website: http://www.mech.utah.edu/~pardyjak/