Image Processing /6.865 Frédo Durand A bunch of slides by Bill Freeman (MIT) & Alyosha Efros (CMU)
|
|
|
- Kelley Lambert
- 5 years ago
- Views:
Transcription
1 Image Processing 6.815/6.865 Frédo Durand A bunch of slides by Bill Freeman (MIT) & Alyosha Efros (CMU)
2 define cumulative histogram work on hist eq proof rearrange Fourier order discuss complex exponentials with eigenfunctions 2
3 Warning Think about final projects 3

4 Class morph 4

5 Image processing Filtering, Convolution, and our friend Joseph Fourier
6 What is an image? We can think of an image as a function, f, from R 2 to R: f( x, y ) gives the intensity at position ( x, y ) Realistically, we expect the image only to be defined over a rectangle, with a finite range: f: [a,b]x[c,d] [0,1] A color image is just three functions pasted together. We can write this as a vectorvalued function:

7 Images as functions
8 Image Processing image filtering: change range of image f g(x) = h(f(x)) f f h x x image warping: change domain of image g(x) = f(h(x)) h f x x
9 Image Processing image filtering: change range of image g(x) = h(f(x)) h image warping: change domain of image g(x) = f(h(x)) h
10 Point Processing The simplest kind of range transformations are these independent of position x,y: g = t(f) This is called point processing. Important: every pixel for himself spatial information completely ignored!
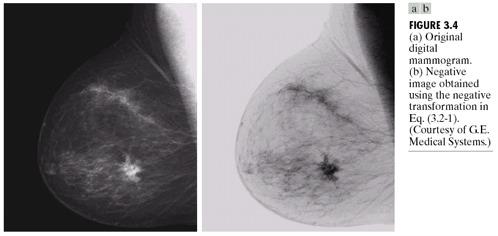
11 Negative

12 Contrast Stretching input output
 cumulative histogram: C(f) = f f H(f) = # or % of pixels with value f Cumulative")
13 Image Histograms histogram H(f) = # or % pixels with value f (implies binning of the values) cumulative histogram: C(f) = f f H(f) = # or % of pixels with value f Cumulative Histograms
14 Histogram Equalization point transformation: g(x)=t(f(x)) uniform across image (t does not depend on x) monotonic (preserve intensity ordering) so that histogram of g is uniform perfect uniform only possible with continuous histogram
15 Qualitative Histogram equalization Qualitative 15
16 Derivation Normalized cumulative histogram C: there are C(f)% pixels equal or darker than f In an image in [0 1] with a flat histogram, what is the greyscale value g so that C(f)% pixels are equal or darker than f? C(f) of course! Therefore, histogram equalization: g(x)=c(f(x)) 16


17 Extension: histogram matching Transform image f to match histogram of f f result f 17
18 Extension: histogram matching Transform image f to match histogram of f g(x)=cf -1 (Cf(f(x))) cumulative histogram Cf of f to get the flat case inverse cumulative histogram Cf -1 of f to match that histogram equalization: case where f has flat histogram and Cf -1 is identity 18
19 Questions?
20 Filtering So far we have looked at range-only and domain-only transformation But other transforms need to change the range according to the spatial neighborhood Linear shift-invariant filtering in particular
21 Linear shift-invariant filtering Replace each pixel by a linear combination of its neighbors. only depends on relative position of neighbors The prescription for the linear combination is called the convolution kernel Local image data kernel 7 Modified image data (shown at one pixel)
22 Example of linear NON-shift invariant transformation? e.g. neutral-density graduated filter (darken high y, preserve small y) J(x,y)=I(x,y)*(1-y/ymax) Formally, what does linear mean? For two scalars a & b and two inputs x & y: F(ax+by)=aF(x)+bF(y) What does shift invariant mean? For a translation T: F(T(x))=T(F(x)) If I blur a translated image, I get a translated 22 blurred image
23 More formally: Convolution I
24 Convolution (warm-up slide) coefficient 1.0? original 0 Pixel offset
25 Convolution (warm-up slide) coefficient 1.0 original 0 Pixel offset Filtered (no change)
26 Convolution coefficient 1.0? original 0 Pixel offset
27 shift coefficient 1.0 original 0 Pixel offset shifted
28 Convolution coefficient 0.3? original 0 Pixel offset
29 Blurring coefficient 0.3 original 0 Pixel offset Blurred (filter applied in both dimensions).
30 Blur examples impulse 8 coefficient original 0 Pixel offset filtered
31 Blur examples impulse 8 coefficient original 0 Pixel offset filtered edge 8 4 coefficient original 0 Pixel offset filtered
32 Questions?
33 Convolution (warm-up slide) ? 0 0 original
34 Convolution (no change) original Filtered (no change)
35 Convolution ? 0 0 original
36 (remember blurring) coefficient 0.3 original 0 Pixel offset Blurred (filter applied in both dimensions).
37 Sharpening original Sharpened original
38 Sharpening example 8 coefficient original Sharpened (differences are accentuated; constant areas are left untouched).

39 Sharpening before after
40 Oriented filters Gabor filters at different scales and spatial frequencies top row shows anti-symmetric (or odd) filters, bottom row the symmetric (or even) filters.

41 Filtered images Reprinted from Shiftable MultiScale Transforms, by Simoncelli et al., IEEE Transactions on Information Theory, 1992, copyright 1992, IEEE
42 Questions?
43 Studying convolutions Convolution is complicated But at least it s linear (f+kg) h = f h +k (g h) We want to find a better expression Let s study functions whose behavior is simple under convolution
44 Blurring: convolution Input Convolution sign Kernel Same shape, just reduced contrast!!! This is an eigenvector (output is the input multiplied by a constant)
45 Big Motivation for Fourier analysis Sine waves are eigenvectors of the convolution operator
46 Other motivation for Fourier analysis: sampling The sampling grid is a periodic structure Fourier is pretty good at handling that We saw that a sine wave has serious problems with sampling Sampling is a linear process but not shift-invariant
47 Sampling Density If we re lucky, sampling density is enough Input Reconstructed
48 Sampling Density If we insufficiently sample the signal, it may be mistaken for something simpler during reconstruction (that's aliasing!)
49 Recap: motivation for sine waves Blurring sine waves is simple You get the same sine wave, just scaled down The sine functions are the eigenvectors of the convolution operator Sampling sine waves is interesting Get another sine wave Not necessarily the same one! (aliasing) If we represent functions (or images) with a sum of sine waves, convolution and sampling are easy to study
50 Questions?
51 Fourier as change of basis Shuffle the data to reveal other information E.g., take average & difference: matrix 3 Basis function 1 Basis function 1 Basis function Basis function 2 0 Signal Geometric interpretation After rotation Pseudo- Fourier
52 Fourier as change of basis Same thing with infinite-dimensional vectors Basis function 1 Basis function 1 Basis function 2 Basis function 2 Signal Geometric interpretation After rotation Pseudo- Fourier
53 Question? 53

54 Fourier as a change of basis Discrete Fourier Transform: just a big matrix But a smart matrix!
 is constant. The magnitude of the vector (u, v) gives a frequency, and its direction gives an orientation.")
55 To get some sense of what basis elements look like, we plot a basis element --- or rather, its real part --- as a function of x,y for some fixed u, v. We get a function that is constant when (ux+vy) is constant. The magnitude of the vector (u, v) gives a frequency, and its direction gives an orientation. The function is a sinusoid with this frequency along the direction, and constant perpendicular to the direction. v u

56 Here u and v are larger than in the previous slide. v u

57 And larger still... v u
58 Question? 58
59 Other presentations of Fourier Start with Fourier series with periodic signal Heat equation more or less special case of convolution iterate -> exponential on eignevalues 59
60 Motivations Insights & mathematical beauty Sampling rate and filtering bandwidth Computation bases FFT: faster convolution E.g. finite elements, fast filtering, heat equation, vibration modes Optics: wave nature of light & diffraction
61 Questions?
62 The Fourier Transform Defined for infinite, aperiodic signals Derived from the Fourier series by extending the period of the signal to infinity The Fourier transform is defined as X(ω) is called the spectrum of x(t) It contains the magnitude and phase of each complex exponential of frequency ω in x(t)
63 The Fourier Transform The inverse Fourier transform is defined as Fourier transform pair x(t) is called the spatial domain representation X(ω) is called the frequency domain representation
64 Beware of differences Different definitions of Fourier transform We use Other people might exclude normalization or include 2π in the frequency X might take ω or jω as argument Physicist use j, mathematicians use i
65 Phase Don t forget the phase! Fourier transform results in complex numbers Can be seen as sum of sines and cosines Or modulus/phase

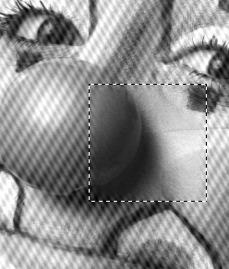
66 Phase is important!

67 Phase is important!
68 Questions?
69 Duality Up to details (such as factors of 2π or signs): if function a is the Fourier transform of b, then b is the Fourier transform of a For example, the Fourier transform of a box is a sinc, and the Fourier transform of a sinc is a box.
70 Duality Any theorem that involves the primal and Fourier domains is also true when swapping the two domains. e.g. shift theorem: Primal f(x+a) Fourier e -2πiaω F(ω) e -2πiax f(x) F(ω+a)
71 Duality Any theorem that involves the primal and Fourier domains is also true when swapping the two domains. e.g. scaling theorem: Primal f(ax) Fourier 1/a F(x/a) 1/a f(x/a) F(ωa)
72 Convolution/Modulation A convolution in one domain is a multiplication in the other one Primal f g Fourier FG fg F G Recall that Fourier bases are eigenvectors of the convolution
73 Questions?

74 Low pass black means 1, white means 0

75 High pass


76 Filtering in Fourier domain
77 Analysis of our simple filters coefficient 1.0 original 0 Pixel offset Filtered (no change) spectrum: F(ω)=1 (yes, I am now using the definition without 1/sqrt(2pi) 1.0 constant 0
78 Analysis of our simple filters coefficient 1.0 original 0 Pixel offset shifted spectrum: F (ω) =e 2πjωδ 0 Constant magnitude, linearly shifted phase
=sinc(ω) =sin(ω)/ω")
79 Analysis of our simple filters coefficient 0.3 original 0 Pixel offset blurred spectrum: F(ω)=sinc(ω) =sin(ω)/ω Low-pass filter

80 Analysis of our simple filters original 0 0 sharpened high-pass filter 2.3 spectrum: F(ω)=2-sinc(ω) 1.0 0
81 Convolution versus FFT 1-d FFT: O(NlogN) computation time, where N is number of samples. 2-d FFT: 2N(NlogN), where N is number of pixels on a side Convolution: K N 2, where K is number of samples in kernel Say N=2 10, K= d FFT: , while convolution gives
82 Words of wisdom Careful with the FFT: it assumes a cyclic signal Oftentimes, the answer you get mostly shows wraparound artifacts Proper windowing might be needed to analyze the frequency content of an image e.g. multiply function by a smooth function that falls off away from the center so that the boundary is zero 82
83 Questions?
84 Sampling and aliasing

85 In photos too MIT EECS SMA 5507, Durand and Popović
86 More on Samples In signal processing, the process of mapping a continuous function to a discrete one is called sampling The process of mapping a continuous variable to a discrete one is called quantization To represent or render an image using a computer, we must both sample and quantize Now we focus on the effects of sampling and how to fight them discrete value discrete position


 sampled")
87 Sampling in the Frequency Domain original signal Fourier Transform sampling grid Fourier Transform (multiplication) (convolution) sampled signal Fourier Transform

88 Reconstruction If we can extract a copy of the original signal from the frequency domain of the sampled signal, we can reconstruct the original signal! But there may be overlap between the copies.

89 Guaranteeing Proper Reconstruction Separate by removing high frequencies from the original signal (low pass pre-filtering) Separate by increasing the sampling density If we can't separate the copies, we will have overlapping frequency spectrum during reconstruction aliasing.
90 Sampling Theorem When sampling a signal at discrete intervals, the sampling frequency must be greater than twice the highest frequency of the input signal in order to be able to reconstruct the original perfectly from the sampled version (Shannon, Nyquist, Whittaker, Kotelnikov, Küpfmüller)
91 91


92 Final project brainstorming Fredo Durand MIT EECS 6.815/6.865
93 Final project Groups of 1 or 2 Proposal due soon (with last pset) Deliverables: report + small presentation
94 Your ideas?
95 Some ideas Use CHDK to provide new features to Canon compact cameras Use flickr API to do something creative Explore different types of gradient reconstructions Improve time lapse Handle small parallax in panoramas Exploit flash/no-flash pairs Editing with images+depth (e.g. from stereo) Smart color to greyscale Face-aware image processing Sharpening out-of-focus images using other pictures from the sequences Application of morphing/warping Motion without movements and automatic illusions
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University. Computer Vision: 4. Filtering
 I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
Fourier Series Example
 Fourier Series Example Let us compute the Fourier series for the function on the interval [ π,π]. f(x) = x f is an odd function, so the a n are zero, and thus the Fourier series will be of the form f(x)
Fourier Series Example Let us compute the Fourier series for the function on the interval [ π,π]. f(x) = x f is an odd function, so the a n are zero, and thus the Fourier series will be of the form f(x)
6.869 Advances in Computer Vision. Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018
 6.869 Advances in Computer Vision Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018 1 Sampling Sampling Pixels Continuous world 3 Sampling 4 Sampling 5 Continuous image f (x, y) Sampling
6.869 Advances in Computer Vision Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018 1 Sampling Sampling Pixels Continuous world 3 Sampling 4 Sampling 5 Continuous image f (x, y) Sampling
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Review: Continuous Fourier Transform
 Review: Continuous Fourier Transform Review: convolution x t h t = x τ h(t τ)dτ Convolution in time domain Derivation Convolution Property Interchange the order of integrals Let Convolution Property By
Review: Continuous Fourier Transform Review: convolution x t h t = x τ h(t τ)dτ Convolution in time domain Derivation Convolution Property Interchange the order of integrals Let Convolution Property By
Image Filtering. Slides, adapted from. Steve Seitz and Rick Szeliski, U.Washington
 Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Linear Operators and Fourier Transform
 Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
IB Paper 6: Signal and Data Analysis
 IB Paper 6: Signal and Data Analysis Handout 5: Sampling Theory S Godsill Signal Processing and Communications Group, Engineering Department, Cambridge, UK Lent 2015 1 / 85 Sampling and Aliasing All of
IB Paper 6: Signal and Data Analysis Handout 5: Sampling Theory S Godsill Signal Processing and Communications Group, Engineering Department, Cambridge, UK Lent 2015 1 / 85 Sampling and Aliasing All of
Review of Linear System Theory
 Review of Linear System Theory The following is a (very) brief review of linear system theory and Fourier analysis. I work primarily with discrete signals. I assume the reader is familiar with linear algebra
Review of Linear System Theory The following is a (very) brief review of linear system theory and Fourier analysis. I work primarily with discrete signals. I assume the reader is familiar with linear algebra
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
Discrete Fourier Transform
 Discrete Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013 Mårten Björkman
Discrete Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013 Mårten Björkman
DISCRETE FOURIER TRANSFORM
 DD2423 Image Processing and Computer Vision DISCRETE FOURIER TRANSFORM Mårten Björkman Computer Vision and Active Perception School of Computer Science and Communication November 1, 2012 1 Terminology:
DD2423 Image Processing and Computer Vision DISCRETE FOURIER TRANSFORM Mårten Björkman Computer Vision and Active Perception School of Computer Science and Communication November 1, 2012 1 Terminology:
Introduction to Computer Vision. 2D Linear Systems
 Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Thinking in Frequency
 09/05/17 Thinking in Frequency Computational Photography University of Illinois Derek Hoiem Administrative Matlab/linear algebra tutorial tomorrow, planned for 6:30pm Probably 1214 DCL (will send confirmation
09/05/17 Thinking in Frequency Computational Photography University of Illinois Derek Hoiem Administrative Matlab/linear algebra tutorial tomorrow, planned for 6:30pm Probably 1214 DCL (will send confirmation
3. Lecture. Fourier Transformation Sampling
 3. Lecture Fourier Transformation Sampling Some slides taken from Digital Image Processing: An Algorithmic Introduction using Java, Wilhelm Burger and Mark James Burge Separability ² The 2D DFT can be
3. Lecture Fourier Transformation Sampling Some slides taken from Digital Image Processing: An Algorithmic Introduction using Java, Wilhelm Burger and Mark James Burge Separability ² The 2D DFT can be
Gradient-domain image processing
 Gradient-domain image processing http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 10 Course announcements Homework 3 is out. - (Much) smaller
Gradient-domain image processing http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 10 Course announcements Homework 3 is out. - (Much) smaller
Module 3 : Sampling and Reconstruction Lecture 22 : Sampling and Reconstruction of Band-Limited Signals
 Module 3 : Sampling and Reconstruction Lecture 22 : Sampling and Reconstruction of Band-Limited Signals Objectives Scope of this lecture: If a Continuous Time (C.T.) signal is to be uniquely represented
Module 3 : Sampling and Reconstruction Lecture 22 : Sampling and Reconstruction of Band-Limited Signals Objectives Scope of this lecture: If a Continuous Time (C.T.) signal is to be uniquely represented
Fourier Transform and Frequency Domain
 Fourier Transform and Frequency Domain http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 3 (part 2) Overview of today s lecture Some history. Fourier series. Frequency domain. Fourier
Fourier Transform and Frequency Domain http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 3 (part 2) Overview of today s lecture Some history. Fourier series. Frequency domain. Fourier
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
MITOCW MITRES_6-007S11lec09_300k.mp4
 MITOCW MITRES_6-007S11lec09_300k.mp4 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources for
MITOCW MITRES_6-007S11lec09_300k.mp4 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources for
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 05 Image Processing Basics 13/02/04 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 05 Image Processing Basics 13/02/04 http://www.ee.unlv.edu/~b1morris/ecg782/
Images have structure at various scales
 Images have structure at various scales Frequency Frequency of a signal is how fast it changes Reflects scale of structure A combination of frequencies 0.1 X + 0.3 X + 0.5 X = Fourier transform Can we
Images have structure at various scales Frequency Frequency of a signal is how fast it changes Reflects scale of structure A combination of frequencies 0.1 X + 0.3 X + 0.5 X = Fourier transform Can we
Fourier Transform and Frequency Domain
 Fourier Transform and Frequency Domain http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 6 Course announcements Last call for responses to Doodle
Fourier Transform and Frequency Domain http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 6 Course announcements Last call for responses to Doodle
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 ECE592-064 Digital mage Processing and ntroduction to Computer Vision Depart. of ECE, NC State University nstructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Thinking in the frequency domain Convolution
ECE592-064 Digital mage Processing and ntroduction to Computer Vision Depart. of ECE, NC State University nstructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Thinking in the frequency domain Convolution
Syllabus for IMGS-616 Fourier Methods in Imaging (RIT #11857) Week 1: 8/26, 8/28 Week 2: 9/2, 9/4
 Week 1: 8/26, 8/28 Week 2: 9/2, 9/4") IMGS 616-20141 p.1 Syllabus for IMGS-616 Fourier Methods in Imaging (RIT #11857) 3 July 2014 (TENTATIVE and subject to change) Note that I expect to be in Europe twice during the term: in Paris the week
IMGS 616-20141 p.1 Syllabus for IMGS-616 Fourier Methods in Imaging (RIT #11857) 3 July 2014 (TENTATIVE and subject to change) Note that I expect to be in Europe twice during the term: in Paris the week
Tutorial Sheet #2 discrete vs. continuous functions, periodicity, sampling
 2.39 utorial Sheet #2 discrete vs. continuous functions, periodicity, sampling We will encounter two classes of signals in this class, continuous-signals and discrete-signals. he distinct mathematical
2.39 utorial Sheet #2 discrete vs. continuous functions, periodicity, sampling We will encounter two classes of signals in this class, continuous-signals and discrete-signals. he distinct mathematical
Lecture 5. The Digital Fourier Transform. (Based, in part, on The Scientist and Engineer's Guide to Digital Signal Processing by Steven Smith)
") Lecture 5 The Digital Fourier Transform (Based, in part, on The Scientist and Engineer's Guide to Digital Signal Processing by Steven Smith) 1 -. 8 -. 6 -. 4 -. 2-1 -. 8 -. 6 -. 4 -. 2 -. 2. 4. 6. 8 1
Lecture 5 The Digital Fourier Transform (Based, in part, on The Scientist and Engineer's Guide to Digital Signal Processing by Steven Smith) 1 -. 8 -. 6 -. 4 -. 2-1 -. 8 -. 6 -. 4 -. 2 -. 2. 4. 6. 8 1
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Frequency Filtering CSC 767
 Frequency Filtering CSC 767 Outline Fourier transform and frequency domain Frequency view of filtering Hybrid images Sampling Slide: Hoiem Why does the Gaussian give a nice smooth image, but the square
Frequency Filtering CSC 767 Outline Fourier transform and frequency domain Frequency view of filtering Hybrid images Sampling Slide: Hoiem Why does the Gaussian give a nice smooth image, but the square
 Fourier Transforms For additional information, see the classic book The Fourier Transform and its Applications by Ronald N. Bracewell (which is on the shelves of most radio astronomers) and the Wikipedia
Fourier Transforms For additional information, see the classic book The Fourier Transform and its Applications by Ronald N. Bracewell (which is on the shelves of most radio astronomers) and the Wikipedia
Image Filtering, Edges and Image Representation
 Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
EA2.3 - Electronics 2 1
 In the previous lecture, I talked about the idea of complex frequency s, where s = σ + jω. Using such concept of complex frequency allows us to analyse signals and systems with better generality. In this
In the previous lecture, I talked about the idea of complex frequency s, where s = σ + jω. Using such concept of complex frequency allows us to analyse signals and systems with better generality. In this
Frequency, Vibration, and Fourier
 Lecture 22: Frequency, Vibration, and Fourier Computer Graphics CMU 15-462/15-662, Fall 2015 Last time: Numerical Linear Algebra Graphics via linear systems of equations Why linear? Have to solve BIG problems
Lecture 22: Frequency, Vibration, and Fourier Computer Graphics CMU 15-462/15-662, Fall 2015 Last time: Numerical Linear Algebra Graphics via linear systems of equations Why linear? Have to solve BIG problems
Fourier transform. Stefano Ferrari. Università degli Studi di Milano Methods for Image Processing. academic year
 Fourier transform Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 27 28 Function transforms Sometimes, operating on a class of functions
Fourier transform Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Methods for Image Processing academic year 27 28 Function transforms Sometimes, operating on a class of functions
DESIGN OF MULTI-DIMENSIONAL DERIVATIVE FILTERS. Eero P. Simoncelli
 Published in: First IEEE Int l Conf on Image Processing, Austin Texas, vol I, pages 790--793, November 1994. DESIGN OF MULTI-DIMENSIONAL DERIVATIVE FILTERS Eero P. Simoncelli GRASP Laboratory, Room 335C
Published in: First IEEE Int l Conf on Image Processing, Austin Texas, vol I, pages 790--793, November 1994. DESIGN OF MULTI-DIMENSIONAL DERIVATIVE FILTERS Eero P. Simoncelli GRASP Laboratory, Room 335C
Why does a lower resolution image still make sense to us? What do we lose? Image:
 2D FREQUENCY DOMAIN The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
2D FREQUENCY DOMAIN The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Subsampling and image pyramids
 Subsampling and image pyramids http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 3 Course announcements Homework 0 and homework 1 will be posted tonight. - Homework 0 is not required
Subsampling and image pyramids http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 3 Course announcements Homework 0 and homework 1 will be posted tonight. - Homework 0 is not required
Image Processing 2. Hakan Bilen University of Edinburgh. Computer Graphics Fall 2017
 Image Processing 2 Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 This week What is an image? What is image processing? Point processing Linear (Spatial) filters Frequency domain Deep
Image Processing 2 Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 This week What is an image? What is image processing? Point processing Linear (Spatial) filters Frequency domain Deep
Index. p, lip, 78 8 function, 107 v, 7-8 w, 7-8 i,7-8 sine, 43 Bo,94-96
 p, lip, 78 8 function, 107 v, 7-8 w, 7-8 i,7-8 sine, 43 Bo,94-96 B 1,94-96 M,94-96 B oro!' 94-96 BIro!' 94-96 I/r, 79 2D linear system, 56 2D FFT, 119 2D Fourier transform, 1, 12, 18,91 2D sinc, 107, 112
p, lip, 78 8 function, 107 v, 7-8 w, 7-8 i,7-8 sine, 43 Bo,94-96 B 1,94-96 M,94-96 B oro!' 94-96 BIro!' 94-96 I/r, 79 2D linear system, 56 2D FFT, 119 2D Fourier transform, 1, 12, 18,91 2D sinc, 107, 112
Fourier Transforms 1D
 Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
Sensors. Chapter Signal Conditioning
 Chapter 2 Sensors his chapter, yet to be written, gives an overview of sensor technology with emphasis on how to model sensors. 2. Signal Conditioning Sensors convert physical measurements into data. Invariably,
Chapter 2 Sensors his chapter, yet to be written, gives an overview of sensor technology with emphasis on how to model sensors. 2. Signal Conditioning Sensors convert physical measurements into data. Invariably,
CS Sampling and Aliasing. Analog vs Digital
 CS 112 - Sampling and Aliasing Aditi Majumder, CS 112, Winter 2007 Slide 1 Analog vs Digital God has created the world analog Man has created digital world Aditi Majumder, CS 112, Winter 2007 Slide 2 1
CS 112 - Sampling and Aliasing Aditi Majumder, CS 112, Winter 2007 Slide 1 Analog vs Digital God has created the world analog Man has created digital world Aditi Majumder, CS 112, Winter 2007 Slide 2 1
The Frequency Domain : Computational Photography Alexei Efros, CMU, Fall Many slides borrowed from Steve Seitz
 The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
MEDE2500 Tutorial Nov-7
 (updated 2016-Nov-4,7:40pm) MEDE2500 (2016-2017) Tutorial 3 MEDE2500 Tutorial 3 2016-Nov-7 Content 1. The Dirac Delta Function, singularity functions, even and odd functions 2. The sampling process and
(updated 2016-Nov-4,7:40pm) MEDE2500 (2016-2017) Tutorial 3 MEDE2500 Tutorial 3 2016-Nov-7 Content 1. The Dirac Delta Function, singularity functions, even and odd functions 2. The sampling process and
Topic 7. Convolution, Filters, Correlation, Representation. Bryan Pardo, 2008, Northwestern University EECS 352: Machine Perception of Music and Audio
 Topic 7 Convolution, Filters, Correlation, Representation Short time Fourier Transform Break signal into windows Calculate DFT of each window The Spectrogram spectrogram(y,1024,512,1024,fs,'yaxis'); A
Topic 7 Convolution, Filters, Correlation, Representation Short time Fourier Transform Break signal into windows Calculate DFT of each window The Spectrogram spectrogram(y,1024,512,1024,fs,'yaxis'); A
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 8- Linear Filters From Spatial Domain to Frequency Domain Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 8- Linear Filters From Spatial Domain to Frequency Domain Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D,
Computer Vision. Filtering in the Frequency Domain
 Computer Vision Filtering in the Frequency Domain Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 Introduction
Computer Vision Filtering in the Frequency Domain Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 Introduction
Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi
 Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Brief Review of Signals and Systems My subject for today s discussion
Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Brief Review of Signals and Systems My subject for today s discussion
Announcements. Filtering. Image Filtering. Linear Filters. Example: Smoothing by Averaging. Homework 2 is due Apr 26, 11:59 PM Reading:
 Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
Additional Pointers. Introduction to Computer Vision. Convolution. Area operations: Linear filtering
 Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
Quality Improves with More Rays
 Recap Quality Improves with More Rays Area Area 1 shadow ray 16 shadow rays CS348b Lecture 8 Pat Hanrahan / Matt Pharr, Spring 2018 pixelsamples = 1 jaggies pixelsamples = 16 anti-aliased Sampling and
Recap Quality Improves with More Rays Area Area 1 shadow ray 16 shadow rays CS348b Lecture 8 Pat Hanrahan / Matt Pharr, Spring 2018 pixelsamples = 1 jaggies pixelsamples = 16 anti-aliased Sampling and
The Frequency Domain, without tears. Many slides borrowed from Steve Seitz
 The Frequency Domain, without tears Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016
The Frequency Domain, without tears Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016
Lecture 27 Frequency Response 2
 Lecture 27 Frequency Response 2 Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/6/12 1 Application of Ideal Filters Suppose we can generate a square wave with a fundamental period
Lecture 27 Frequency Response 2 Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/6/12 1 Application of Ideal Filters Suppose we can generate a square wave with a fundamental period
Lecture 7 January 26, 2016
 MATH 262/CME 372: Applied Fourier Analysis and Winter 26 Elements of Modern Signal Processing Lecture 7 January 26, 26 Prof Emmanuel Candes Scribe: Carlos A Sing-Long, Edited by E Bates Outline Agenda:
MATH 262/CME 372: Applied Fourier Analysis and Winter 26 Elements of Modern Signal Processing Lecture 7 January 26, 26 Prof Emmanuel Candes Scribe: Carlos A Sing-Long, Edited by E Bates Outline Agenda:
Nonlinear Diffusion. 1 Introduction: Motivation for non-standard diffusion
 Nonlinear Diffusion These notes summarize the way I present this material, for my benefit. But everything in here is said in more detail, and better, in Weickert s paper. 1 Introduction: Motivation for
Nonlinear Diffusion These notes summarize the way I present this material, for my benefit. But everything in here is said in more detail, and better, in Weickert s paper. 1 Introduction: Motivation for
Multiscale Image Transforms
 Multiscale Image Transforms Goal: Develop filter-based representations to decompose images into component parts, to extract features/structures of interest, and to attenuate noise. Motivation: extract
Multiscale Image Transforms Goal: Develop filter-based representations to decompose images into component parts, to extract features/structures of interest, and to attenuate noise. Motivation: extract
Multiresolution schemes
 Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Multi-dimensional signal processing Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione
Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Multi-dimensional signal processing Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione
Multiresolution schemes
 Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione dei Segnali Multi-dimensionali e
Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione dei Segnali Multi-dimensionali e
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Information and Communications Security: Encryption and Information Hiding
 Short Course on Information and Communications Security: Encryption and Information Hiding Tuesday, 10 March Friday, 13 March, 2015 Lecture 5: Signal Analysis Contents The complex exponential The complex
Short Course on Information and Communications Security: Encryption and Information Hiding Tuesday, 10 March Friday, 13 March, 2015 Lecture 5: Signal Analysis Contents The complex exponential The complex
Vector calculus background
 Vector calculus background Jiří Lebl January 18, 2017 This class is really the vector calculus that you haven t really gotten to in Calc III. Let us start with a very quick review of the concepts from
Vector calculus background Jiří Lebl January 18, 2017 This class is really the vector calculus that you haven t really gotten to in Calc III. Let us start with a very quick review of the concepts from
FROM ANALOGUE TO DIGITAL
 SIGNALS AND SYSTEMS: PAPER 3C1 HANDOUT 7. Dr David Corrigan 1. Electronic and Electrical Engineering Dept. corrigad@tcd.ie www.mee.tcd.ie/ corrigad FROM ANALOGUE TO DIGITAL To digitize signals it is necessary
SIGNALS AND SYSTEMS: PAPER 3C1 HANDOUT 7. Dr David Corrigan 1. Electronic and Electrical Engineering Dept. corrigad@tcd.ie www.mee.tcd.ie/ corrigad FROM ANALOGUE TO DIGITAL To digitize signals it is necessary
Dr. David A. Clifton Group Leader Computational Health Informatics (CHI) Lab Lecturer in Engineering Science, Balliol College
 Lab Lecturer in Engineering Science, Balliol College") Dr. David A. Clifton Group Leader Computational Health Informatics (CHI) Lab Lecturer in Engineering Science, Balliol College 1. Introduction to Fourier analysis, the Fourier series 2. Sampling and Aliasing
Dr. David A. Clifton Group Leader Computational Health Informatics (CHI) Lab Lecturer in Engineering Science, Balliol College 1. Introduction to Fourier analysis, the Fourier series 2. Sampling and Aliasing
Over-enhancement Reduction in Local Histogram Equalization using its Degrees of Freedom. Alireza Avanaki
 Over-enhancement Reduction in Local Histogram Equalization using its Degrees of Freedom Alireza Avanaki ABSTRACT A well-known issue of local (adaptive) histogram equalization (LHE) is over-enhancement
Over-enhancement Reduction in Local Histogram Equalization using its Degrees of Freedom Alireza Avanaki ABSTRACT A well-known issue of local (adaptive) histogram equalization (LHE) is over-enhancement
Neural Networks 2. 2 Receptive fields and dealing with image inputs
 CS 446 Machine Learning Fall 2016 Oct 04, 2016 Neural Networks 2 Professor: Dan Roth Scribe: C. Cheng, C. Cervantes Overview Convolutional Neural Networks Recurrent Neural Networks 1 Introduction There
CS 446 Machine Learning Fall 2016 Oct 04, 2016 Neural Networks 2 Professor: Dan Roth Scribe: C. Cheng, C. Cervantes Overview Convolutional Neural Networks Recurrent Neural Networks 1 Introduction There
ITK Filters. Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms
 ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
Recap of Monday. Linear filtering. Be aware of details for filter size, extrapolation, cropping
 Recap of Monday Linear filtering h[ m, n] k, l f [ k, l] I[ m Not a matrix multiplication Sum over Hadamard product k, n l] Can smooth, sharpen, translate (among many other uses) 1 1 1 1 1 1 1 1 1 Be aware
Recap of Monday Linear filtering h[ m, n] k, l f [ k, l] I[ m Not a matrix multiplication Sum over Hadamard product k, n l] Can smooth, sharpen, translate (among many other uses) 1 1 1 1 1 1 1 1 1 Be aware
Wavelet Transform. Figure 1: Non stationary signal f(t) = sin(100 t 2 ).
 = sin(100 t 2 ).") Wavelet Transform Andreas Wichert Department of Informatics INESC-ID / IST - University of Lisboa Portugal andreas.wichert@tecnico.ulisboa.pt September 3, 0 Short Term Fourier Transform Signals whose frequency
Wavelet Transform Andreas Wichert Department of Informatics INESC-ID / IST - University of Lisboa Portugal andreas.wichert@tecnico.ulisboa.pt September 3, 0 Short Term Fourier Transform Signals whose frequency
(Refer Slide Time: 01:28 03:51 min)
") Digital Signal Processing Prof. S. C. Dutta Roy Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture 40 FIR Design by Windowing This is the 40 th lecture and our topic for
Digital Signal Processing Prof. S. C. Dutta Roy Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture 40 FIR Design by Windowing This is the 40 th lecture and our topic for
Today s lecture. Local neighbourhood processing. The convolution. Removing uncorrelated noise from an image The Fourier transform
 Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Theory of signals and images I. Dr. Victor Castaneda
 Theory of signals and images I Dr. Victor Castaneda Image as a function Think of an image as a function, f, f: R 2 R I=f(x, y) gives the intensity at position (x, y) The image only is defined over a rectangle,
Theory of signals and images I Dr. Victor Castaneda Image as a function Think of an image as a function, f, f: R 2 R I=f(x, y) gives the intensity at position (x, y) The image only is defined over a rectangle,
Histogram Processing
 Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Super-Resolution. Dr. Yossi Rubner. Many slides from Miki Elad - Technion
 Super-Resolution Dr. Yossi Rubner yossi@rubner.co.il Many slides from Mii Elad - Technion 5/5/2007 53 images, ratio :4 Example - Video 40 images ratio :4 Example Surveillance Example Enhance Mosaics Super-Resolution
Super-Resolution Dr. Yossi Rubner yossi@rubner.co.il Many slides from Mii Elad - Technion 5/5/2007 53 images, ratio :4 Example - Video 40 images ratio :4 Example Surveillance Example Enhance Mosaics Super-Resolution
6 The Fourier transform
 6 The Fourier transform In this presentation we assume that the reader is already familiar with the Fourier transform. This means that we will not make a complete overview of its properties and applications.
6 The Fourier transform In this presentation we assume that the reader is already familiar with the Fourier transform. This means that we will not make a complete overview of its properties and applications.
MITOCW ocw-18_02-f07-lec17_220k
 MITOCW ocw-18_02-f07-lec17_220k The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources for free.
MITOCW ocw-18_02-f07-lec17_220k The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources for free.
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
Review of Linear Systems Theory
 Review of Linear Systems Theory The following is a (very) brief review of linear systems theory, convolution, and Fourier analysis. I work primarily with discrete signals, but each result developed in
Review of Linear Systems Theory The following is a (very) brief review of linear systems theory, convolution, and Fourier analysis. I work primarily with discrete signals, but each result developed in
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Slow mo guys Saccades. https://youtu.be/fmg9zohesgq?t=4s
 Slow mo guys Saccades https://youtu.be/fmg9zohesgq?t=4s Thinking in Frequency Computer Vision James Hays Slides: Hoiem, Efros, and others Recap of Wednesday Linear filtering is dot product at each position
Slow mo guys Saccades https://youtu.be/fmg9zohesgq?t=4s Thinking in Frequency Computer Vision James Hays Slides: Hoiem, Efros, and others Recap of Wednesday Linear filtering is dot product at each position
MITOCW ocw f99-lec23_300k
 MITOCW ocw-18.06-f99-lec23_300k -- and lift-off on differential equations. So, this section is about how to solve a system of first order, first derivative, constant coefficient linear equations. And if
MITOCW ocw-18.06-f99-lec23_300k -- and lift-off on differential equations. So, this section is about how to solve a system of first order, first derivative, constant coefficient linear equations. And if
CITY UNIVERSITY LONDON. MSc in Information Engineering DIGITAL SIGNAL PROCESSING EPM746
 No: CITY UNIVERSITY LONDON MSc in Information Engineering DIGITAL SIGNAL PROCESSING EPM746 Date: 19 May 2004 Time: 09:00-11:00 Attempt Three out of FIVE questions, at least One question from PART B PART
No: CITY UNIVERSITY LONDON MSc in Information Engineering DIGITAL SIGNAL PROCESSING EPM746 Date: 19 May 2004 Time: 09:00-11:00 Attempt Three out of FIVE questions, at least One question from PART B PART
1 1.27z z 2. 1 z H 2
 E481 Digital Signal Processing Exam Date: Thursday -1-1 16:15 18:45 Final Exam - Solutions Dan Ellis 1. (a) In this direct-form II second-order-section filter, the first stage has
E481 Digital Signal Processing Exam Date: Thursday -1-1 16:15 18:45 Final Exam - Solutions Dan Ellis 1. (a) In this direct-form II second-order-section filter, the first stage has
Wavelets and Multiresolution Processing
 Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Linear Algebra in Numerical Methods. Lecture on linear algebra MATLAB/Octave works well with linear algebra
 Linear Algebra in Numerical Methods Lecture on linear algebra MATLAB/Octave works well with linear algebra Linear Algebra A pseudo-algebra that deals with a system of equations and the transformations
Linear Algebra in Numerical Methods Lecture on linear algebra MATLAB/Octave works well with linear algebra Linear Algebra A pseudo-algebra that deals with a system of equations and the transformations
G52IVG, School of Computer Science, University of Nottingham
 Image Transforms Fourier Transform Basic idea 1 Image Transforms Fourier transform theory Let f(x) be a continuous function of a real variable x. The Fourier transform of f(x) is F ( u) f ( x)exp[ j2πux]
Image Transforms Fourier Transform Basic idea 1 Image Transforms Fourier transform theory Let f(x) be a continuous function of a real variable x. The Fourier transform of f(x) is F ( u) f ( x)exp[ j2πux]
56 CHAPTER 3. POLYNOMIAL FUNCTIONS
 56 CHAPTER 3. POLYNOMIAL FUNCTIONS Chapter 4 Rational functions and inequalities 4.1 Rational functions Textbook section 4.7 4.1.1 Basic rational functions and asymptotes As a first step towards understanding
56 CHAPTER 3. POLYNOMIAL FUNCTIONS Chapter 4 Rational functions and inequalities 4.1 Rational functions Textbook section 4.7 4.1.1 Basic rational functions and asymptotes As a first step towards understanding
Tutorial 4. Fast Fourier Transforms Phase factors runs around on the unit circle contains Wave forms
 Tutorial 4. Fast Fourier Transforms Phase factors There are functions that produce roots-of-one as a function of time (t) or place (x). A good example is a Bloch function φ(x) = exp(i kx) or the phase
Tutorial 4. Fast Fourier Transforms Phase factors There are functions that produce roots-of-one as a function of time (t) or place (x). A good example is a Bloch function φ(x) = exp(i kx) or the phase
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
2.2 Graphs of Functions
 2.2 Graphs of Functions Introduction DEFINITION domain of f, D(f) Associated with every function is a set called the domain of the function. This set influences what the graph of the function looks like.
2.2 Graphs of Functions Introduction DEFINITION domain of f, D(f) Associated with every function is a set called the domain of the function. This set influences what the graph of the function looks like.
Lagrange Multipliers
 Optimization with Constraints As long as algebra and geometry have been separated, their progress have been slow and their uses limited; but when these two sciences have been united, they have lent each
Optimization with Constraints As long as algebra and geometry have been separated, their progress have been slow and their uses limited; but when these two sciences have been united, they have lent each
Linear Algebra Review. Fei-Fei Li
 Linear Algebra Review Fei-Fei Li 1 / 51 Vectors Vectors and matrices are just collections of ordered numbers that represent something: movements in space, scaling factors, pixel brightnesses, etc. A vector
Linear Algebra Review Fei-Fei Li 1 / 51 Vectors Vectors and matrices are just collections of ordered numbers that represent something: movements in space, scaling factors, pixel brightnesses, etc. A vector
Today s lecture. The Fourier transform. Sampling, aliasing, interpolation The Fast Fourier Transform (FFT) algorithm
 algorithm") Today s lecture The Fourier transform What is it? What is it useful for? What are its properties? Sampling, aliasing, interpolation The Fast Fourier Transform (FFT) algorithm Jean Baptiste Joseph Fourier
Today s lecture The Fourier transform What is it? What is it useful for? What are its properties? Sampling, aliasing, interpolation The Fast Fourier Transform (FFT) algorithm Jean Baptiste Joseph Fourier
Bézier Curves and Splines
 CS-C3100 Computer Graphics Bézier Curves and Splines Majority of slides from Frédo Durand vectorportal.com CS-C3100 Fall 2017 Lehtinen Before We Begin Anything on your mind concerning Assignment 1? CS-C3100
CS-C3100 Computer Graphics Bézier Curves and Splines Majority of slides from Frédo Durand vectorportal.com CS-C3100 Fall 2017 Lehtinen Before We Begin Anything on your mind concerning Assignment 1? CS-C3100
Lecture 10: A (Brief) Introduction to Group Theory (See Chapter 3.13 in Boas, 3rd Edition)
 Introduction to Group Theory (See Chapter 3.13 in Boas, 3rd Edition)") Lecture 0: A (Brief) Introduction to Group heory (See Chapter 3.3 in Boas, 3rd Edition) Having gained some new experience with matrices, which provide us with representations of groups, and because symmetries
Lecture 0: A (Brief) Introduction to Group heory (See Chapter 3.3 in Boas, 3rd Edition) Having gained some new experience with matrices, which provide us with representations of groups, and because symmetries
Laplacian Mesh Processing
 Sorkine et al. Laplacian Mesh Processing (includes material from Olga Sorkine, Yaron Lipman, Marc Pauly, Adrien Treuille, Marc Alexa and Daniel Cohen-Or) Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749
Sorkine et al. Laplacian Mesh Processing (includes material from Olga Sorkine, Yaron Lipman, Marc Pauly, Adrien Treuille, Marc Alexa and Daniel Cohen-Or) Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749