Histogram Processing
|
|
|
- Chrystal Carroll
- 5 years ago
- Views:
Transcription
1 Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having gray level value r k
2 Normalization: h( r ) p( r ) = k = k n n k n n p( r k ) = total number of pixels in the image = probability of occurrence of gray level r k k p( ) = r k
3 p(r k ) =h(r k )/n r k = 255 k p( ) = r k

4 Uniformly distributed histogram yields HIGH CONTRAST IMAGE Hence, histogram processing requires the stretching of gray level uniformly over the entire gray level range. This is histogram equalization
 r =")




5 Histogram p(r) r =

6 Histogram equalization p(s) 0 s
7 . Requires the distribution of histogram peaks uniformly over the entire gray level range 2. Equalize the height of the peaks Let us define the gray level values (r) to be Continuous and Normalized between [0,]
8 r = 0 Black r = White For any r, the transformation s = T( r) ; 0 r
9 Let us require that the transformation function T(r) should satisfy. T(r) is single valued and monotonically increasing in the interval 0 r 2. 0 T(r) for 0 r
10 s T(r) r Single valued and monotonically increasing
11 s T(r) Not single valued r Inverse transformation of the T(r) will not give the original image
12 Non-monotonic transformation function s T(r) r Transformation from black white Transformation from white black
13 Hence the requirements:. T(r) should be single valued which ensures the inverse transformation will exists The monotonicity condition preserves the increasing order from black to white in the output image 2. Condition (b) guarantees the output gray levels will be in the same range as that of input range
14 The gray levels (r or s) in an image random variable in the interval [0,] p r ( r) & p ( s) s are the PDFs of random variables r and s, respectively From the PDF theory of the random variable: ps ( s) ds = pr ( r) dr
15 To make the histogram uniform: ) ( = s p s ) ( ) ( ) ( ) ( r T d p s d p ds dr r p ds r r r r s r = = = = ω ω ω ω Put,
16 r s = T ( r) = p ( ω) dω r 0 Hence, the transformation function (T(r)) is equal to the CDF of random variable, r a)t(r) is singled valued and monotonically increasing function. Hence the first condition is satisfied. b) Values of T(r) or s lie in the range [0,]
17 For discrete values, 0,,..., ) ( = = L k n n r p k k r = = = k j j r k k r p r T s 0 ) ( ) (..., 0,,, ) ( 0 = = = = L k for n n r T s k j j k k
18 This will do the histogram equalization AUTOMATICALLY


19
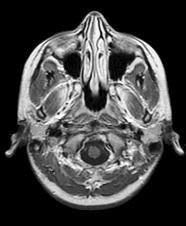
20 Image averaging Noisy image can be enhanced by averaging it over a set of images A noisy image (g(x,y)) can be expressed as g( x, y) = f ( x, y) + η( x, y)
21 where f ( x, y) = Original image η ( x, y) = Noise If the noise η(x,y) is uncorrelated, then η( The expected value of the noise η(x,y) = 0 The expected covariance of the two random variables = 0
22 { g ( x, y)} i Represents a set of noisy image The average image is formed by, g( x, y) = K K i= g i ( x, y) K K = f + K i i= i= η i
23 Take expectation either side E K ( g) = E( f ) + E( η ) i i K i= i= K f i is a constant and same for all the images E { f } = f i i &
24 E{ η } = i 0 E { g( x, y)} = f ( x, y)

25 K=8 K=6 K=64 K=28

26



27 Scaling of the gray levels during mathematical operation + = unscaled scaled
28 - unscaled = scaled
29 Mask filtering in spatial domain Subimage Subimage filter, mask, kernel, template, or window
30 The subimages can be
31 Subimage is a small matrix whose elements are called COFFIECIENTS Preferably, the size of the mask should be odd If (m x n) size of the mask Then, m=2a+ and n=2b+ a, b are integers
32 Linear filter: = = + + = b b t a a s t y s x f t s w y x g ), ( ), ( ), ( The coefficients w(x,y) are defined by the user; depending on the nature of the filter required
33 eg., for an average filter of mask 3x3, each coefficient should be /9 W = /9
34 To perform the averaging, vary x =0,,2,.M- y =0,,2 N-
35 2 W = / Weighted average
36 = = = = + + = b b t a a s b b t a a s t s w t y s x f t s w y x g ), ( ), ( ), ( ), ( Hence the general expression for avg.
37 Mask reaches the border: (a) (b) Padding

38 Mask size --, 3 5, 9 5, 35
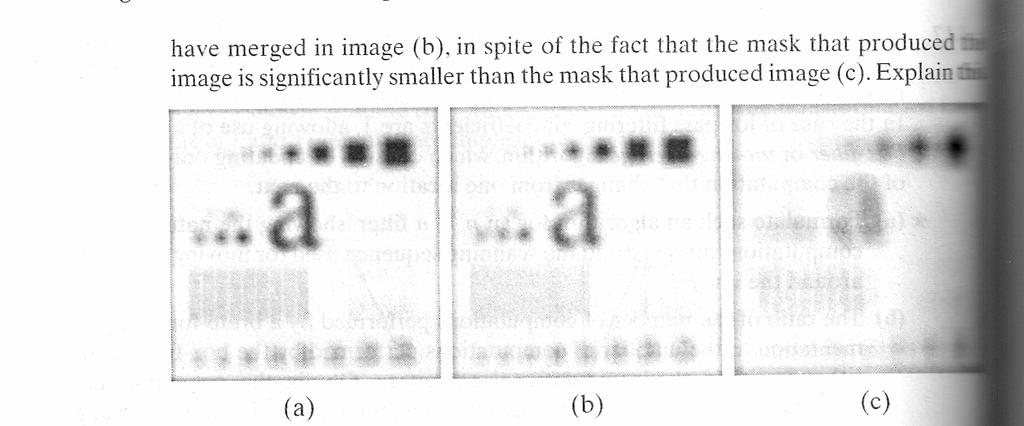
39 Averaging removes smaller details It leads to blurring

40
41 Non-linear filters: e.g., Median filter, variance filter Median filter is very powerful in removing random noise with considerably less blurring than linear avg. filter of similar size Median filters are effective for impulse noise.
42 Find median of the set of 5 numbers 5, 7, 4, 5, 3, 6, 8, 7, 2,, 0, 4, 4,, 3 a) Arrange them as 0,,, 3, 3, 4, 4, 5, 5, 6, 7, 7, 8, 2, 4 Median = 5
43 Find median of the set of 4 numbers 87, 55, 67, 87, 98, 80, 45, 65, 75, 67, 87, 92, 87, 63 Arrange them 45, 55, 63, 65, 67, 67, 75, 80, 87, 87, 87, 87, 92, 98 Median = Avg(75,80) = 77.5
44

45 Noisy image Median filtered image (3x3 mask)
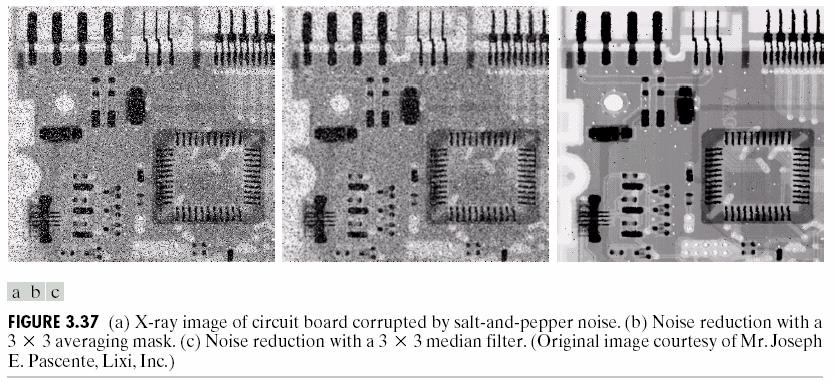
46 Comparison
47 a) Max filter The pixel value is replaced by the maximum calculated from the neighborhood. b) Min Filter The pixel value is replaced by the minimum calculated from the neighborhood. c) Mid point filter The pixel value is replaced by the 0.5*(min+max) calculated from the neighborhood.
48
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Intensity Transformations and Spatial Filtering: WHICH ONE LOOKS BETTER? Intensity Transformations and Spatial Filtering: WHICH ONE LOOKS BETTER?
 : WHICH ONE LOOKS BETTER? 3.1 : WHICH ONE LOOKS BETTER? 3.2 1 Goal: Image enhancement seeks to improve the visual appearance of an image, or convert it to a form suited for analysis by a human or a machine.
: WHICH ONE LOOKS BETTER? 3.1 : WHICH ONE LOOKS BETTER? 3.2 1 Goal: Image enhancement seeks to improve the visual appearance of an image, or convert it to a form suited for analysis by a human or a machine.
Local enhancement. Local Enhancement. Local histogram equalized. Histogram equalized. Local Contrast Enhancement. Fig 3.23: Another example
 Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Image Enhancement: Methods. Digital Image Processing. No Explicit definition. Spatial Domain: Frequency Domain:
 Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]
![Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]](/thumbs/77/75889528.jpg "Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]") CEE 615: Digital Image Processing Spatial Enhancements 1 Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ] Template (Windowing) Operations Template (window, box, kernel)
CEE 615: Digital Image Processing Spatial Enhancements 1 Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ] Template (Windowing) Operations Template (window, box, kernel)
Review Smoothing Spatial Filters Sharpening Spatial Filters. Spatial Filtering. Dr. Praveen Sankaran. Department of ECE NIT Calicut.
 Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
18/10/2017. Image Enhancement in the Spatial Domain: Gray-level transforms. Image Enhancement in the Spatial Domain: Gray-level transforms
 Gray-level transforms Gray-level transforms Generic, possibly nonlinear, pointwise operator (intensity mapping, gray-level transformation): Basic gray-level transformations: Negative: s L 1 r Generic log:
Gray-level transforms Gray-level transforms Generic, possibly nonlinear, pointwise operator (intensity mapping, gray-level transformation): Basic gray-level transformations: Negative: s L 1 r Generic log:
Introduction to Computer Vision. 2D Linear Systems
 Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
IMAGE ENHANCEMENT II (CONVOLUTION)
") MOTIVATION Recorded images often exhibit problems such as: blurry noisy Image enhancement aims to improve visual quality Cosmetic processing Usually empirical techniques, with ad hoc parameters ( whatever
MOTIVATION Recorded images often exhibit problems such as: blurry noisy Image enhancement aims to improve visual quality Cosmetic processing Usually empirical techniques, with ad hoc parameters ( whatever
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Local Enhancement. Local enhancement
 Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Image Processing. Transforms. Mylène Christine Queiroz de Farias
 Image Processing Transforms Mylène Christine Queiroz de Farias Departamento de Engenharia Elétrica Universidade de Brasília (UnB) Brasília, DF 70910-900 mylene@unb.br 13 de Março de 2017 Class 03: Chapter
Image Processing Transforms Mylène Christine Queiroz de Farias Departamento de Engenharia Elétrica Universidade de Brasília (UnB) Brasília, DF 70910-900 mylene@unb.br 13 de Março de 2017 Class 03: Chapter
Empirical Mean and Variance!
 Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
Image Processing. Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010
 Image Processing Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010 Ch3. Image Enhancement in the Spatial Domain Note that T (m) = 0.5 E. The general law of contrast
Image Processing Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010 Ch3. Image Enhancement in the Spatial Domain Note that T (m) = 0.5 E. The general law of contrast
Colorado School of Mines Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Department of Electrical Engineering and Computer Science Spatial Filtering Main idea Spatial filtering Define a neighborhood of a pixel
Image and Multidimensional Signal Processing Professor William Hoff Department of Electrical Engineering and Computer Science Spatial Filtering Main idea Spatial filtering Define a neighborhood of a pixel
Today s lecture. Local neighbourhood processing. The convolution. Removing uncorrelated noise from an image The Fourier transform
 Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
Fourier Transforms 1D
 Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
Biomedical Image Analysis. Segmentation by Thresholding
 Biomedical Image Analysis Segmentation by Thresholding Contents: Thresholding principles Ridler & Calvard s method Ridler TW, Calvard S (1978). Picture thresholding using an iterative selection method,
Biomedical Image Analysis Segmentation by Thresholding Contents: Thresholding principles Ridler & Calvard s method Ridler TW, Calvard S (1978). Picture thresholding using an iterative selection method,
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Linear Operators and Fourier Transform
 Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Lecture Outline. Basics of Spatial Filtering Smoothing Spatial Filters. Sharpening Spatial Filters
 1 Lecture Outline Basics o Spatial Filtering Smoothing Spatial Filters Averaging ilters Order-Statistics ilters Sharpening Spatial Filters Laplacian ilters High-boost ilters Gradient Masks Combining Spatial
1 Lecture Outline Basics o Spatial Filtering Smoothing Spatial Filters Averaging ilters Order-Statistics ilters Sharpening Spatial Filters Laplacian ilters High-boost ilters Gradient Masks Combining Spatial
Image Degradation Model (Linear/Additive)
") Image Degradation Model (Linear/Additive),,,,,,,, g x y h x y f x y x y G uv H uv F uv N uv 1 Source of noise Image acquisition (digitization) Image transmission Spatial properties of noise Statistical
Image Degradation Model (Linear/Additive),,,,,,,, g x y h x y f x y x y G uv H uv F uv N uv 1 Source of noise Image acquisition (digitization) Image transmission Spatial properties of noise Statistical
at Some sort of quantization is necessary to represent continuous signals in digital form
 Quantization at Some sort of quantization is necessary to represent continuous signals in digital form x(n 1,n ) x(t 1,tt ) D Sampler Quantizer x q (n 1,nn ) Digitizer (A/D) Quantization is also used for
Quantization at Some sort of quantization is necessary to represent continuous signals in digital form x(n 1,n ) x(t 1,tt ) D Sampler Quantizer x q (n 1,nn ) Digitizer (A/D) Quantization is also used for
Image Degradation Model (Linear/Additive)
") Image Degradation Model (Linear/Additive),,,,,,,, g x y f x y h x y x y G u v F u v H u v N u v 1 Source of noise Objects Impurities Image acquisition (digitization) Image transmission Spatial properties
Image Degradation Model (Linear/Additive),,,,,,,, g x y f x y h x y x y G u v F u v H u v N u v 1 Source of noise Objects Impurities Image acquisition (digitization) Image transmission Spatial properties
Image Characteristics
 1 Image Characteristics Image Mean I I av = i i j I( i, j 1 j) I I NEW (x,y)=i(x,y)-b x x Changing the image mean Image Contrast The contrast definition of the entire image is ambiguous In general it is
1 Image Characteristics Image Mean I I av = i i j I( i, j 1 j) I I NEW (x,y)=i(x,y)-b x x Changing the image mean Image Contrast The contrast definition of the entire image is ambiguous In general it is
Math 180A. Lecture 16 Friday May 7 th. Expectation. Recall the three main probability density functions so far (1) Uniform (2) Exponential.
 Uniform (2) Exponential.") Math 8A Lecture 6 Friday May 7 th Epectation Recall the three main probability density functions so far () Uniform () Eponential (3) Power Law e, ( ), Math 8A Lecture 6 Friday May 7 th Epectation Eample
Math 8A Lecture 6 Friday May 7 th Epectation Recall the three main probability density functions so far () Uniform () Eponential (3) Power Law e, ( ), Math 8A Lecture 6 Friday May 7 th Epectation Eample
Stochastic Processes. M. Sami Fadali Professor of Electrical Engineering University of Nevada, Reno
 Stochastic Processes M. Sami Fadali Professor of Electrical Engineering University of Nevada, Reno 1 Outline Stochastic (random) processes. Autocorrelation. Crosscorrelation. Spectral density function.
Stochastic Processes M. Sami Fadali Professor of Electrical Engineering University of Nevada, Reno 1 Outline Stochastic (random) processes. Autocorrelation. Crosscorrelation. Spectral density function.
Image Noise: Detection, Measurement and Removal Techniques. Zhifei Zhang
 Image Noise: Detection, Measurement and Removal Techniques Zhifei Zhang Outline Noise measurement Filter-based Block-based Wavelet-based Noise removal Spatial domain Transform domain Non-local methods
Image Noise: Detection, Measurement and Removal Techniques Zhifei Zhang Outline Noise measurement Filter-based Block-based Wavelet-based Noise removal Spatial domain Transform domain Non-local methods
TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection
 Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Filtering in Frequency Domain
 Dr. Praveen Sankaran Department of ECE NIT Calicut February 4, 2013 Outline 1 2D DFT - Review 2 2D Sampling 2D DFT - Review 2D Impulse Train s [t, z] = m= n= δ [t m T, z n Z] (1) f (t, z) s [t, z] sampled
Dr. Praveen Sankaran Department of ECE NIT Calicut February 4, 2013 Outline 1 2D DFT - Review 2 2D Sampling 2D DFT - Review 2D Impulse Train s [t, z] = m= n= δ [t m T, z n Z] (1) f (t, z) s [t, z] sampled
LPA-ICI Applications in Image Processing
 LPA-ICI Applications in Image Processing Denoising Deblurring Derivative estimation Edge detection Inverse halftoning Denoising Consider z (x) =y (x)+η (x), wherey is noise-free image and η is noise. assume
LPA-ICI Applications in Image Processing Denoising Deblurring Derivative estimation Edge detection Inverse halftoning Denoising Consider z (x) =y (x)+η (x), wherey is noise-free image and η is noise. assume
Sampling in 1D ( ) Continuous time signal f(t) Discrete time signal. f(t) comb
 Continuous time signal f(t) Discrete time signal. f(t) comb") Sampling in 2D 1 Sampling in 1D Continuous time signal f(t) Discrete time signal t ( ) f [ k] = f( kt ) = f( t) δ t kt s k s f(t) comb k 2 Nyquist theorem (1D) At least 2 sample/period are needed to represent
Sampling in 2D 1 Sampling in 1D Continuous time signal f(t) Discrete time signal t ( ) f [ k] = f( kt ) = f( t) δ t kt s k s f(t) comb k 2 Nyquist theorem (1D) At least 2 sample/period are needed to represent
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
 UNIT III IMAGE RESTORATION Part A Questions 1. What is meant by Image Restoration? Restoration attempts to reconstruct or recover an image that has been degraded by using a clear knowledge of the degrading
UNIT III IMAGE RESTORATION Part A Questions 1. What is meant by Image Restoration? Restoration attempts to reconstruct or recover an image that has been degraded by using a clear knowledge of the degrading
ITK Filters. Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms
 ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
BAYESIAN DECISION THEORY
 Last updated: September 17, 2012 BAYESIAN DECISION THEORY Problems 2 The following problems from the textbook are relevant: 2.1 2.9, 2.11, 2.17 For this week, please at least solve Problem 2.3. We will
Last updated: September 17, 2012 BAYESIAN DECISION THEORY Problems 2 The following problems from the textbook are relevant: 2.1 2.9, 2.11, 2.17 For this week, please at least solve Problem 2.3. We will
COMP344 Digital Image Processing Fall 2007 Final Examination
 COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Over-enhancement Reduction in Local Histogram Equalization using its Degrees of Freedom. Alireza Avanaki
 Over-enhancement Reduction in Local Histogram Equalization using its Degrees of Freedom Alireza Avanaki ABSTRACT A well-known issue of local (adaptive) histogram equalization (LHE) is over-enhancement
Over-enhancement Reduction in Local Histogram Equalization using its Degrees of Freedom Alireza Avanaki ABSTRACT A well-known issue of local (adaptive) histogram equalization (LHE) is over-enhancement
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Image Compression 2 Image Compression Goal: Reduce amount
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Image Compression 2 Image Compression Goal: Reduce amount
Computational Photography
 Computational Photography Si Lu Spring 208 http://web.cecs.pdx.edu/~lusi/cs50/cs50_computati onal_photography.htm 04/0/208 Last Time o Digital Camera History of Camera Controlling Camera o Photography
Computational Photography Si Lu Spring 208 http://web.cecs.pdx.edu/~lusi/cs50/cs50_computati onal_photography.htm 04/0/208 Last Time o Digital Camera History of Camera Controlling Camera o Photography
for valid PSD. PART B (Answer all five units, 5 X 10 = 50 Marks) UNIT I
 UNIT I") Code: 15A04304 R15 B.Tech II Year I Semester (R15) Regular Examinations November/December 016 PROBABILITY THEY & STOCHASTIC PROCESSES (Electronics and Communication Engineering) Time: 3 hours Max. Marks:
Code: 15A04304 R15 B.Tech II Year I Semester (R15) Regular Examinations November/December 016 PROBABILITY THEY & STOCHASTIC PROCESSES (Electronics and Communication Engineering) Time: 3 hours Max. Marks:
Outline. Convolution. Filtering
 Filtering Outline Convolution Filtering Logistics HW1 HW2 - out tomorrow Recall: what is a digital (grayscale) image? Matrix of integer values Images as height fields Let s think of image as zero-padded
Filtering Outline Convolution Filtering Logistics HW1 HW2 - out tomorrow Recall: what is a digital (grayscale) image? Matrix of integer values Images as height fields Let s think of image as zero-padded
A NO-REFERENCE SHARPNESS METRIC SENSITIVE TO BLUR AND NOISE. Xiang Zhu and Peyman Milanfar
 A NO-REFERENCE SARPNESS METRIC SENSITIVE TO BLUR AND NOISE Xiang Zhu and Peyman Milanfar Electrical Engineering Department University of California at Santa Cruz, CA, 9564 xzhu@soeucscedu ABSTRACT A no-reference
A NO-REFERENCE SARPNESS METRIC SENSITIVE TO BLUR AND NOISE Xiang Zhu and Peyman Milanfar Electrical Engineering Department University of California at Santa Cruz, CA, 9564 xzhu@soeucscedu ABSTRACT A no-reference
Slide a window along the input arc sequence S. Least-squares estimate. σ 2. σ Estimate 1. Statistically test the difference between θ 1 and θ 2
 Corner Detection 2D Image Features Corners are important two dimensional features. Two dimensional image features are interesting local structures. They include junctions of dierent types Slide 3 They
Corner Detection 2D Image Features Corners are important two dimensional features. Two dimensional image features are interesting local structures. They include junctions of dierent types Slide 3 They
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Locality function LOC(.) and loss function LOSS (.) and a priori knowledge on images inp
 and loss function LOSS (.) and a priori knowledge on images inp") L. Yaroslavsky. Course 0510.7211 Digital Image Processing: Applications Lecture 12. Nonlinear filters for image restoration and enhancement Local criteria of image quality: AVLOSS( k, l) = AV LOC( m, n;
L. Yaroslavsky. Course 0510.7211 Digital Image Processing: Applications Lecture 12. Nonlinear filters for image restoration and enhancement Local criteria of image quality: AVLOSS( k, l) = AV LOC( m, n;
Corner. Corners are the intersections of two edges of sufficiently different orientations.
 2D Image Features Two dimensional image features are interesting local structures. They include junctions of different types like Y, T, X, and L. Much of the work on 2D features focuses on junction L,
2D Image Features Two dimensional image features are interesting local structures. They include junctions of different types like Y, T, X, and L. Much of the work on 2D features focuses on junction L,
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Using Entropy and 2-D Correlation Coefficient as Measuring Indices for Impulsive Noise Reduction Techniques
 Using Entropy and 2-D Correlation Coefficient as Measuring Indices for Impulsive Noise Reduction Techniques Zayed M. Ramadan Department of Electronics and Communications Engineering, Faculty of Engineering,
Using Entropy and 2-D Correlation Coefficient as Measuring Indices for Impulsive Noise Reduction Techniques Zayed M. Ramadan Department of Electronics and Communications Engineering, Faculty of Engineering,
Optimum Ordering and Pole-Zero Pairing. Optimum Ordering and Pole-Zero Pairing Consider the scaled cascade structure shown below
 Pole-Zero Pairing of the Cascade Form IIR Digital Filter There are many possible cascade realiations of a higher order IIR transfer function obtained by different pole-ero pairings and ordering Each one
Pole-Zero Pairing of the Cascade Form IIR Digital Filter There are many possible cascade realiations of a higher order IIR transfer function obtained by different pole-ero pairings and ordering Each one
Detection of signal transitions by order statistics filtering
 Detection of signal transitions by order statistics filtering A. Raji Images, Signals and Intelligent Systems Laboratory Paris-Est Creteil University, France Abstract In this article, we present a non
Detection of signal transitions by order statistics filtering A. Raji Images, Signals and Intelligent Systems Laboratory Paris-Est Creteil University, France Abstract In this article, we present a non
PCA & ICA. CE-717: Machine Learning Sharif University of Technology Spring Soleymani
 PCA & ICA CE-717: Machine Learning Sharif University of Technology Spring 2015 Soleymani Dimensionality Reduction: Feature Selection vs. Feature Extraction Feature selection Select a subset of a given
PCA & ICA CE-717: Machine Learning Sharif University of Technology Spring 2015 Soleymani Dimensionality Reduction: Feature Selection vs. Feature Extraction Feature selection Select a subset of a given
Chapter 1 Statistical Reasoning Why statistics? Section 1.1 Basics of Probability Theory
 Chapter 1 Statistical Reasoning Why statistics? Uncertainty of nature (weather, earth movement, etc. ) Uncertainty in observation/sampling/measurement Variability of human operation/error imperfection
Chapter 1 Statistical Reasoning Why statistics? Uncertainty of nature (weather, earth movement, etc. ) Uncertainty in observation/sampling/measurement Variability of human operation/error imperfection
Signals and Spectra - Review
 Signals and Spectra - Review SIGNALS DETERMINISTIC No uncertainty w.r.t. the value of a signal at any time Modeled by mathematical epressions RANDOM some degree of uncertainty before the signal occurs
Signals and Spectra - Review SIGNALS DETERMINISTIC No uncertainty w.r.t. the value of a signal at any time Modeled by mathematical epressions RANDOM some degree of uncertainty before the signal occurs
Review. DS GA 1002 Statistical and Mathematical Models. Carlos Fernandez-Granda
 Review DS GA 1002 Statistical and Mathematical Models http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall16 Carlos Fernandez-Granda Probability and statistics Probability: Framework for dealing with
Review DS GA 1002 Statistical and Mathematical Models http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall16 Carlos Fernandez-Granda Probability and statistics Probability: Framework for dealing with
Image Processing /6.865 Frédo Durand A bunch of slides by Bill Freeman (MIT) & Alyosha Efros (CMU)
 & Alyosha Efros (CMU)") Image Processing 6.815/6.865 Frédo Durand A bunch of slides by Bill Freeman (MIT) & Alyosha Efros (CMU) define cumulative histogram work on hist eq proof rearrange Fourier order discuss complex exponentials
Image Processing 6.815/6.865 Frédo Durand A bunch of slides by Bill Freeman (MIT) & Alyosha Efros (CMU) define cumulative histogram work on hist eq proof rearrange Fourier order discuss complex exponentials
3.8 Combining Spatial Enhancement Methods 137
 3.8 Combining Spatial Enhancement Methods 137 a b FIGURE 3.45 Optical image of contact lens (note defects on the boundary at 4 and 5 o clock). (b) Sobel gradient. (Original image courtesy of Mr. Pete Sites,
3.8 Combining Spatial Enhancement Methods 137 a b FIGURE 3.45 Optical image of contact lens (note defects on the boundary at 4 and 5 o clock). (b) Sobel gradient. (Original image courtesy of Mr. Pete Sites,
EE4512 Analog and Digital Communications Chapter 4. Chapter 4 Receiver Design
 Chapter 4 Receiver Design Chapter 4 Receiver Design Probability of Bit Error Pages 124-149 149 Probability of Bit Error The low pass filtered and sampled PAM signal results in an expression for the probability
Chapter 4 Receiver Design Chapter 4 Receiver Design Probability of Bit Error Pages 124-149 149 Probability of Bit Error The low pass filtered and sampled PAM signal results in an expression for the probability
Descriptive Statistics
 Descriptive Statistics DS GA 1002 Probability and Statistics for Data Science http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall17 Carlos Fernandez-Granda Descriptive statistics Techniques to visualize
Descriptive Statistics DS GA 1002 Probability and Statistics for Data Science http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall17 Carlos Fernandez-Granda Descriptive statistics Techniques to visualize
Tutorial 9 The Discrete Fourier Transform (DFT) SIPC , Spring 2017 Technion, CS Department
 SIPC , Spring 2017 Technion, CS Department") Tutorial 9 The Discrete Fourier Transform (DFT) SIPC 236327, Spring 2017 Technion, CS Department The DFT Matrix The DFT matrix of size M M is defined as DFT = 1 M W 0 0 W 0 W 0 W where W = e i2π M i =
Tutorial 9 The Discrete Fourier Transform (DFT) SIPC 236327, Spring 2017 Technion, CS Department The DFT Matrix The DFT matrix of size M M is defined as DFT = 1 M W 0 0 W 0 W 0 W where W = e i2π M i =
Bayes Theorem. Jan Kracík. Department of Applied Mathematics FEECS, VŠB - TU Ostrava
 Jan Kracík Department of Applied Mathematics FEECS, VŠB - TU Ostrava Introduction Bayes theorem fundamental theorem in probability theory named after reverend Thomas Bayes (1701 1761) discovered in Bayes
Jan Kracík Department of Applied Mathematics FEECS, VŠB - TU Ostrava Introduction Bayes theorem fundamental theorem in probability theory named after reverend Thomas Bayes (1701 1761) discovered in Bayes
Prof. Mohd Zaid Abdullah Room No:
 EEE 52/4 Advnced Digital Signal and Image Processing Tuesday, 00-300 hrs, Data Com. Lab. Friday, 0800-000 hrs, Data Com. Lab Prof. Mohd Zaid Abdullah Room No: 5 Email: mza@usm.my www.eng.usm.my Electromagnetic
EEE 52/4 Advnced Digital Signal and Image Processing Tuesday, 00-300 hrs, Data Com. Lab. Friday, 0800-000 hrs, Data Com. Lab Prof. Mohd Zaid Abdullah Room No: 5 Email: mza@usm.my www.eng.usm.my Electromagnetic
Optimum Ordering and Pole-Zero Pairing of the Cascade Form IIR. Digital Filter
 Optimum Ordering and Pole-Zero Pairing of the Cascade Form IIR Digital Filter There are many possible cascade realiations of a higher order IIR transfer function obtained by different pole-ero pairings
Optimum Ordering and Pole-Zero Pairing of the Cascade Form IIR Digital Filter There are many possible cascade realiations of a higher order IIR transfer function obtained by different pole-ero pairings
Digital Image Processing ERRATA. Wilhelm Burger Mark J. Burge. An algorithmic introduction using Java. Second Edition. Springer
 Wilhelm Burger Mark J. Burge Digital Image Processing An algorithmic introduction using Java Second Edition ERRATA Springer Berlin Heidelberg NewYork Hong Kong London Milano Paris Tokyo 5 Filters K K No
Wilhelm Burger Mark J. Burge Digital Image Processing An algorithmic introduction using Java Second Edition ERRATA Springer Berlin Heidelberg NewYork Hong Kong London Milano Paris Tokyo 5 Filters K K No
BME 50500: Image and Signal Processing in Biomedicine. Lecture 5: Correlation and Power-Spectrum CCNY
 1 BME 50500: Image and Signal Processing in Biomedicine Lecture 5: Correlation and Power-Spectrum Lucas C. Parra Biomedical Engineering Department CCNY http://bme.ccny.cuny.edu/faculty/parra/teaching/signal-and-image/
1 BME 50500: Image and Signal Processing in Biomedicine Lecture 5: Correlation and Power-Spectrum Lucas C. Parra Biomedical Engineering Department CCNY http://bme.ccny.cuny.edu/faculty/parra/teaching/signal-and-image/
Enhancement Using Local Histogram
 Enhancement Using Local Histogram Used to enhance details over small portions o the image. Deine a square or rectangular neighborhood hose center moves rom piel to piel. Compute local histogram based on
Enhancement Using Local Histogram Used to enhance details over small portions o the image. Deine a square or rectangular neighborhood hose center moves rom piel to piel. Compute local histogram based on
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 7 Spectral Image Processing and Convolution Winter Semester 2014/15 Slides: Prof. Bernd
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 7 Spectral Image Processing and Convolution Winter Semester 2014/15 Slides: Prof. Bernd
IMAGE COMPRESSION-II. Week IX. 03/6/2003 Image Compression-II 1
 IMAGE COMPRESSION-II Week IX 3/6/23 Image Compression-II 1 IMAGE COMPRESSION Data redundancy Self-information and Entropy Error-free and lossy compression Huffman coding Predictive coding Transform coding
IMAGE COMPRESSION-II Week IX 3/6/23 Image Compression-II 1 IMAGE COMPRESSION Data redundancy Self-information and Entropy Error-free and lossy compression Huffman coding Predictive coding Transform coding
Wavelets and Multiresolution Processing
 Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering
 ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
Spatially adaptive alpha-rooting in BM3D sharpening
 Spatially adaptive alpha-rooting in BM3D sharpening Markku Mäkitalo and Alessandro Foi Department of Signal Processing, Tampere University of Technology, P.O. Box FIN-553, 33101, Tampere, Finland e-mail:
Spatially adaptive alpha-rooting in BM3D sharpening Markku Mäkitalo and Alessandro Foi Department of Signal Processing, Tampere University of Technology, P.O. Box FIN-553, 33101, Tampere, Finland e-mail:
Estimators for Orientation and Anisotropy in Digitized Images
 Estimators for Orientation and Anisotropy in Digitized Images Lucas J. van Vliet and Piet W. Verbeek Pattern Recognition Group of the Faculty of Applied Physics Delft University of Technolo Lorentzweg,
Estimators for Orientation and Anisotropy in Digitized Images Lucas J. van Vliet and Piet W. Verbeek Pattern Recognition Group of the Faculty of Applied Physics Delft University of Technolo Lorentzweg,
Satellite image deconvolution using complex wavelet packets
 Satellite image deconvolution using complex wavelet packets André Jalobeanu, Laure Blanc-Féraud, Josiane Zerubia ARIANA research group INRIA Sophia Antipolis, France CNRS / INRIA / UNSA www.inria.fr/ariana
Satellite image deconvolution using complex wavelet packets André Jalobeanu, Laure Blanc-Féraud, Josiane Zerubia ARIANA research group INRIA Sophia Antipolis, France CNRS / INRIA / UNSA www.inria.fr/ariana
Statistical signal processing
 Statistical signal processing Short overview of the fundamentals Outline Random variables Random processes Stationarity Ergodicity Spectral analysis Random variable and processes Intuition: A random variable
Statistical signal processing Short overview of the fundamentals Outline Random variables Random processes Stationarity Ergodicity Spectral analysis Random variable and processes Intuition: A random variable
Random Number Generation. CS1538: Introduction to simulations
 Random Number Generation CS1538: Introduction to simulations Random Numbers Stochastic simulations require random data True random data cannot come from an algorithm We must obtain it from some process
Random Number Generation CS1538: Introduction to simulations Random Numbers Stochastic simulations require random data True random data cannot come from an algorithm We must obtain it from some process
Introduction to the Discrete Fourier Transform
 Introduction to the Discrete ourier Transform Lucas J. van Vliet www.ph.tn.tudelft.nl/~lucas TNW: aculty of Applied Sciences IST: Imaging Science and technology PH: Linear Shift Invariant System A discrete
Introduction to the Discrete ourier Transform Lucas J. van Vliet www.ph.tn.tudelft.nl/~lucas TNW: aculty of Applied Sciences IST: Imaging Science and technology PH: Linear Shift Invariant System A discrete
Edge Detection in Computer Vision Systems
 1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
Gaussian Random Variables Why we Care
 Gaussian Random Variables Why we Care I Gaussian random variables play a critical role in modeling many random phenomena. I By central limit theorem, Gaussian random variables arise from the superposition
Gaussian Random Variables Why we Care I Gaussian random variables play a critical role in modeling many random phenomena. I By central limit theorem, Gaussian random variables arise from the superposition
Revision of Lecture 4
 Revision of Lecture 4 We have completed studying digital sources from information theory viewpoint We have learnt all fundamental principles for source coding, provided by information theory Practical
Revision of Lecture 4 We have completed studying digital sources from information theory viewpoint We have learnt all fundamental principles for source coding, provided by information theory Practical
6.435, System Identification
 System Identification 6.435 SET 3 Nonparametric Identification Munther A. Dahleh 1 Nonparametric Methods for System ID Time domain methods Impulse response Step response Correlation analysis / time Frequency
System Identification 6.435 SET 3 Nonparametric Identification Munther A. Dahleh 1 Nonparametric Methods for System ID Time domain methods Impulse response Step response Correlation analysis / time Frequency
Announcements. Filtering. Image Filtering. Linear Filters. Example: Smoothing by Averaging. Homework 2 is due Apr 26, 11:59 PM Reading:
 Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
Statistical Data Analysis
 DS-GA 0 Lecture notes 8 Fall 016 1 Descriptive statistics Statistical Data Analysis In this section we consider the problem of analyzing a set of data. We describe several techniques for visualizing the
DS-GA 0 Lecture notes 8 Fall 016 1 Descriptive statistics Statistical Data Analysis In this section we consider the problem of analyzing a set of data. We describe several techniques for visualizing the
Chapter 2. Random Variable. Define single random variables in terms of their PDF and CDF, and calculate moments such as the mean and variance.
 Chapter 2 Random Variable CLO2 Define single random variables in terms of their PDF and CDF, and calculate moments such as the mean and variance. 1 1. Introduction In Chapter 1, we introduced the concept
Chapter 2 Random Variable CLO2 Define single random variables in terms of their PDF and CDF, and calculate moments such as the mean and variance. 1 1. Introduction In Chapter 1, we introduced the concept
Digital Signal Processing
 COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
EE5356 Digital Image Processing
 EE5356 Digital Image Processing INSTRUCTOR: Dr KR Rao Spring 007, Final Thursday, 10 April 007 11:00 AM 1:00 PM ( hours) (Room 111 NH) INSTRUCTIONS: 1 Closed books and closed notes All problems carry weights
EE5356 Digital Image Processing INSTRUCTOR: Dr KR Rao Spring 007, Final Thursday, 10 April 007 11:00 AM 1:00 PM ( hours) (Room 111 NH) INSTRUCTIONS: 1 Closed books and closed notes All problems carry weights
Probability Space. J. McNames Portland State University ECE 538/638 Stochastic Signals Ver
 Stochastic Signals Overview Definitions Second order statistics Stationarity and ergodicity Random signal variability Power spectral density Linear systems with stationary inputs Random signal memory Correlation
Stochastic Signals Overview Definitions Second order statistics Stationarity and ergodicity Random signal variability Power spectral density Linear systems with stationary inputs Random signal memory Correlation
Multiresolution image processing
 Multiresolution image processing Laplacian pyramids Some applications of Laplacian pyramids Discrete Wavelet Transform (DWT) Wavelet theory Wavelet image compression Bernd Girod: EE368 Digital Image Processing
Multiresolution image processing Laplacian pyramids Some applications of Laplacian pyramids Discrete Wavelet Transform (DWT) Wavelet theory Wavelet image compression Bernd Girod: EE368 Digital Image Processing
Morphological image processing
 INF 4300 Digital Image Analysis Morphological image processing Fritz Albregtsen 09.11.2017 1 Today Gonzalez and Woods, Chapter 9 Except sections 9.5.7 (skeletons), 9.5.8 (pruning), 9.5.9 (reconstruction)
INF 4300 Digital Image Analysis Morphological image processing Fritz Albregtsen 09.11.2017 1 Today Gonzalez and Woods, Chapter 9 Except sections 9.5.7 (skeletons), 9.5.8 (pruning), 9.5.9 (reconstruction)
SUMMARIZING MEASURED DATA. Gaia Maselli
 SUMMARIZING MEASURED DATA Gaia Maselli maselli@di.uniroma1.it Computer Network Performance 2 Overview Basic concepts Summarizing measured data Summarizing data by a single number Summarizing variability
SUMMARIZING MEASURED DATA Gaia Maselli maselli@di.uniroma1.it Computer Network Performance 2 Overview Basic concepts Summarizing measured data Summarizing data by a single number Summarizing variability
Chapter 2: Fundamentals of Statistics Lecture 15: Models and statistics
 Chapter 2: Fundamentals of Statistics Lecture 15: Models and statistics Data from one or a series of random experiments are collected. Planning experiments and collecting data (not discussed here). Analysis:
Chapter 2: Fundamentals of Statistics Lecture 15: Models and statistics Data from one or a series of random experiments are collected. Planning experiments and collecting data (not discussed here). Analysis:
Business Statistics Midterm Exam Fall 2015 Russell. Please sign here to acknowledge
 Business Statistics Midterm Exam Fall 5 Russell Name Do not turn over this page until you are told to do so. You will have hour and 3 minutes to complete the exam. There are a total of points divided into
Business Statistics Midterm Exam Fall 5 Russell Name Do not turn over this page until you are told to do so. You will have hour and 3 minutes to complete the exam. There are a total of points divided into
Multimedia Databases. Previous Lecture. 4.1 Multiresolution Analysis. 4 Shape-based Features. 4.1 Multiresolution Analysis
 Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Lecture 14: Multivariate mgf s and chf s
 Lecture 14: Multivariate mgf s and chf s Multivariate mgf and chf For an n-dimensional random vector X, its mgf is defined as M X (t) = E(e t X ), t R n and its chf is defined as φ X (t) = E(e ıt X ),
Lecture 14: Multivariate mgf s and chf s Multivariate mgf and chf For an n-dimensional random vector X, its mgf is defined as M X (t) = E(e t X ), t R n and its chf is defined as φ X (t) = E(e ıt X ),
Expectation Maximization Deconvolution Algorithm
 Epectation Maimization Deconvolution Algorithm Miaomiao ZHANG March 30, 2011 Abstract In this paper, we use a general mathematical and eperimental methodology to analyze image deconvolution. The main procedure
Epectation Maimization Deconvolution Algorithm Miaomiao ZHANG March 30, 2011 Abstract In this paper, we use a general mathematical and eperimental methodology to analyze image deconvolution. The main procedure