CAMERA GEOMETRY. Ajit Rajwade, CS 763, Winter 2017, IITB, CSE department
|
|
|
- Deirdre Lawson
- 5 years ago
- Views:
Transcription
1 CAMERA GEOMETRY Aji Rajwade, CS 763, Wine 7, IITB, CSE depamen
2 Conens Tansfomaions of poins/vecos in D Tansfomaions of poins/vecos in 3D Image Fomaion: geome of pojecion of 3D poins ono D image plane Vanishing Poins Camea Calibaion
3 Tansfomaions of poins and vecos in D
4 Tanslaion and Roaion Le us denoe he coodinaes of he oiginal poin as (, ) and hose of he ansfomed poin as as (, ). Tanslaion: Roaion abou poin (,) ani-clockwise hough angle q cos θ sin θ cos θ sin θ sin θ cos θ sin θ cos θ D Roaion mai (ohonomal mai and wih deeminan )
5 Tanslaion and oaion Roaion abou poin ( c, c ) ani-clockwise hough angle q c c c c c c θ ) ( θ ) ( θ ) ( θ ) ( cos sin sin cos -Pefom anslaion such ha ( c, c ) coincides wih he oigin. -Roae abou he new oigin. -Tanslae back. Noe: we ae inoducing a hid (ficiious) coodinae even hough he poins ae in D. This enables anslaion opeaions o be epessed in he mai muliplicaion famewok. This new coodinae is called as he homogeneous coodinae. cos sin sin cos cos sin sin cos θ θ θ θ θ θ θ θ c c c c c c c c
6 Tanslaion and oaion Roaion and anslaion: Tanslaions and oaions ae igid ansfomaions he peseve angles, lenghs and aeas. cos sin sin cos cos sin sin cos θ θ θ θ θ θ θ θ
7 Tanslaions/oaion o Affine Tansfomaions Affine ansfomaion: oaion, anslaion, scaling and sheaing A A A A Assumpion: he sub-mai A is NOT ank deficien, ohewise i will ansfom wo-dimensional figues ino a line o a poin. The mai A in geneal is NOT ohonomal. If i is ohonomal, his educes o eihe a oaion (deeminan ) o eflecion (deeminan = -)
8 Affine Tansfomaions Scaling If c = - and c =, hen he scaling opeaion is called eflecion acoss he Y ais. If c = and c = -, hen i is called eflecion acoss X ais. Reflecions can occu acoss an abia ais.
9 Affine ansfomaions Sheaing: k k k k ' ; ' ' ' ', ' ' ' hp://cs.fi.edu/~wds/classes/cse555/hesis/shea/shea.hml k= k=
10 Affine ansfomaion The D affine ansfomaion model (including anslaion in X and Y diecion) includes 6 degees of feedom. The affine ansfomaions geneall do no peseve lenghs, angles and aeas. Bu he peseve collineai of poins, i.e. poins on one line emain on a line afe affine ansfomaion. The peseve aios of lenghs of collinea line segmens and aios of aeas. In fac aea of ansfomed objec = A aea of oiginal objec, whee A is he ansfomaion mai.
11 Composiion of affine ansfomaions Composiion of muliple pes of affine ansfomaions is given b he muliplicaion of hei coesponding maices. Eample: eflecion acoss an abia diecion hough (,). (,) Line L ϴ (, )
12 Composiion of affine ansfomaions Appl a oaion R such ha line L coincides wih eihe he X ais (o he Y ais). Appl a eflecion R abou he X ais (o he Y ais). Appl a evese oaion R =R - such ha he oiginal oienaion of L is esoed. ' ' cosq sinq sinq cosq cosq sinq sinq cosq R R R
13 Composiion of affine ansfomaions How will ou change his if he diecion L didn pass hough he oigin? (,) Line L ϴ (, )
14 Composiion of affine ansfomaions In geneal, affine ansfomaions ae no commuaive, i.e. T A T B T B T A. When composing ansfomaions, emembe ha successive anslaions ae addiive (and commuaive). u u u u u u
15 Composiion of affine ansfomaions When composing ansfomaions, emembe ha successive oaions ae addiive (and commuaive). Successive scalings ae muliplicaive (and commuaive). ) cos( ) sin( ) sin( ) cos( cos sin sin cos cos sin sin cos θ θ θ θ θ θ θ θ s w w s s s w w
16 Tansfomaions of poins/vecos in 3D

17 Tanslaion and Roaion in 3D ' ' z' z z ' ' R z' z 3D Roaion mai, size 3 3. R is ohonomal (R T = R - )and has a deeminan of. Roaion in 3D is associaed wih an ais. We efe o oaion in 3D as oaion abou an ais. The following ae he oaion maices fo an angle abou he X,Y,Z aes especivel. Y Righ-handed coodinae ssem (X ais o he igh, Y ais X poins up) Z Noe: Roaion abou X ais leaves X coodinae unchanged, oaion abou Y ais leaves Y coodinae unchanged, oaion abou Z ais leaves Z coodinae unchanged. All hese 3 maices epesen ani-clockwise oaion of column vecos, assuming he ais of oaion poins owad he obseve and we have a igh-handed coodinae ssem.
18 hp:// hp://paulbouke.ne/geome/oae/ Roaion abou abia ais Le he abia ais be given as a uni veco = (,, 3 ) passing hough he oigin. We wan o oae abou his ais hough angle ρ.
19 hp:// hp://paulbouke.ne/geome/oae/ Roaion abou abia ais To do his, we shall appl some geomeic ansfomaions o he objec o align = (,, 3 ) wih he Z ais. We will hen oae he objec abou he Z ais hough angle ρ. We will hen appl he evese ansfomaion fom he fis sep o he objec.
20 Roaion abou an abia ais Roae abou he X ais so ha i now aligns wih he XZ plane (i.e. we wan o nullif is Y coodinae). Fo his, we oae abou X ais hough an angle ϴ given b sinq ansfoming, cosq 3 3 o 3,, ) ' (,, ) ( 3 3 Noe: As he pojecion of ono he ZY planes aligns iself wih he Z ais (ha s how he angle θ is calculaed), he veco ges ino he XZ plane.
21 Roaion abou an abia ais Now oae abou Y ais hough angle (-ϴ ) (o align i wih he Z ais) given b: sinq, cosq ansfoming ' (,, 3 ) o '' (,,)
22 Roaion abou an abia ais Now oae abou he Z ais hough angle ρ. Now evese oae abou Y-ais hough angle ϴ. Now evese oae abou X-ais hough angle ϴ. The final oaion mai is given as: R ( ) R( q ) R( q ) Rz( ) R( q ) R( q) Noe: in his deivaion, we could have also applied ansfomaions o bing ino he YZ plane b oaion abou Y ais (insead of binging i ino he XZ plane b oaing abou X ais), and hen aligned i wih Z ais b oaion abou X ais. Also hee is no specific eason wh we chose Z ais o align veco wih. We could have chosen he X o Y aes as well.
23 Roaion abou an abia ais The final oaion mai can be shown o have he following fom (ais is uni veco L = [l,m,n], i.e. l +m +n =, passing hough he oigin):
24 Roaion maices Regadless of ais, an oaion mai is alwas ohonomal. The do poduc of an wo (diffeen) ows is, he do poduc of an wo (diffeen) columns is. The magniude of an ow (o column) is. Thus RR T = R T R = I, R T =R - A oaion mai is ohonomal, bu no eve ohonomal mai is a oaion mai (wh?)
25 Affine ansfomaions in 3D 3D affine ansfomaions ae epesened as follows: z A A A A A A A A A z z Thee ae degees of feedom. This subsumes oaions, scalings, sheaing, eflecions and anslaions. Rigid ansfomaions (oaions and anslaions) peseve lenghs, aeas and angles. Affine ansfomaions peseve collineai of poins, and aios of disances, bu no lenghs o aeas o angles.
26 Reflecions in 3D Acoss XY plane: Z coodinae changes Acoss YZ plane: X coodinae changes z z z z
27 Composiion of affine ansfomaions Composiion of muliple pes of affine ansfomaions is given b he muliplicaion of hei coesponding maices. Eample: Reflecion acoss an abia plane P:. Tanslae so ha a known poin in plane P coincides wih he oigin.. Roae such ha he nomal veco of he plane coincides wih he Z ais. 3. Pefom eflecion acoss XY plane (Z ais is nomal o he XY plane). 4. Appl invese ansfom fo sep. 5. Appl invese ansfom fo sep.
28 Composiion of affine ansfomaions Jus as in D, affine ansfomaions in 3D do no commue in geneal. Successive anslaions ae addiive, successive scaling abou he same ais ae muliplicaive, successive oaions abou he same ais ae addiive.
29 Degees of feedom (DoF) in 3D oaion mai The numbe of DoF efes o he numbe of independen paamees equied o chaaceize he oaion mai. A 3D oaion mai has size 3 3, bu i has onl 3 DoF. This is because he oaion in 3D is paameeized b an ais (which is a uni veco and has DoF) and he angle of oaion (which gives he 3 d DoF). Anohe wa of seeing his: he fis column of he ohonomal mai accouns fo DoF (as i is a uni veco), he second column being pependicula o he fis one accouns fo one moe DoF (wh jus one moe? *), and he hid column is a coss poduc of he fis wo columns (aking cae o choose he sign such ha he deeminan of he mai is ). * If ou conside a plane pependicula o he veco given b he fis column, hen he second veco is given b a oaion b angle (sa) ϒ inside his plane ha s wh jus one DoF.
30 Image Fomaion in a Camea
31 Pinhole Camea No pinhole Baie wih pinhole: blocks mos of he ligh as Objec Objec Phoo Film Phoo Film

32 Pinhole Camea wih Non-Inveed Plane
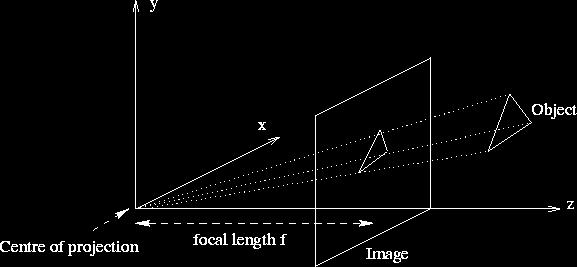
33 Image Fomaion in a Pinhole Camea O = cene of pojecion of he camea (pinhole), also eaed as oigin of he coodinae ssem fo he objec ( camea coodinae ssem o camea fame ) P = (X,Y,Z) = objec poin (3D veco) p = (,,z=f) image of P on he image plane π, Z ais is nomal o π (i.e. π is paallel o XOY plane) Noe: p is obained b he inesecion of line OP wih π o = image cene- given b he poin whee he veco nomal o π and passing hough O (his veco is he Z ais!) inesecs π. Line Oo = opical ais of he camea lens (coincides wih he Z ais) f = focal lengh = pependicula disance fom O ono he image plane π = lengh of segmen Oo
 p=(,) Z B similai of iangles: p ais o ais X Y X ais X f, Z X f,")
 p = pojecion of p ono XZ plane,")
34 hp://en.wikipedia.og/wiki/pinhole_camea_model Y ais Z ais P=(X,Y,Z) p=(,) Z B similai of iangles: p ais o ais X Y X ais X f, Z X f, Z f f Y Z Y Z Fo non-inveed image plane: Which iangles ae simila? Tiangle Oop and Tiangle OO P (analogousl Tiangle Oop and Tiangle OO P ae simila) p = pojecion of p ono XZ plane, O = Conside plane passing hough P and paallel o image plane. O is he inesecion of he opical ais Oo wih his plane. P = pojecion of P ono XZ plane.
 p = pojecion of p ono XZ plane, O = Conside plane passing hough P and paallel o image plane.")
35 hp://en.wikipedia.og/wiki/pinhole_camea_model o p O Z O X ais of image plane X ais P X Z ais Viewing down he Y ais f Which iangles ae simila? Tiangle Oop and Tiangle OO P (analogousl Tiangle Oop and Tiangle OO P ae simila) p = pojecion of p ono XZ plane, O = Conside plane passing hough P and paallel o image plane. O is he inesecion of he opical ais Oo wih his plane. P = pojecion of P ono XZ plane. X Z Viewing down he X ais will ield a simila figue and lead ou o deive: f Y Z
36 Image Fomaion in a Pinhole Camea The pojecion p of poin P is called a pespecive pojecion. The elaion beween p = (,,z=f) and P = (X,Y,Z) is non-linea, as he Z coodinae will va fom poin o poin. This pe of a ansfomaion does no peseve angles, lenghs o aeas. I is also non-linea. In mai fom, we have: f / Z f / Z X Y Z Noe ha he enies in his mai hemselves depend on he Z coodinae of he objec poin(s). So his is a non-linea elaionship!
37 Image Fomaion in a Pinhole Camea: Homogeneous Coodinaes The elaionship beween (,) and (X,Y,Z) can also be epessed as follows using homogeneous coodinaes: ' ', ' ', ' ' ' z z Z Y X f f z
38 Piels and Image poins The objec poins pojec ono poins in an image. The image epesened in a camea is in disceized foma, in he fom of a D aa. Thus he coodinaes p = (,,z=f) ae conveed ino discee spaial coodinaes in ems of piels. The eac elaionship depends upon he sampling ae of he camea (piel esoluion) and he aspec aio. ( o ) s, ( o ) s im im Coodinaes of opical cene in ems of piels Piel aspec aio
39 Weak-pespecive pojecion If he vaiaion in deph (Z coodinae) of diffeen poins in he scene is negligible compaed o he aveage deph Z of he scene, hen he pojecion is called weakpespecive: ', ' ) ) ' / ( ' / ( ' ' Z Y f Z X f Z Z Z X f Z X f
40 Ohogaphic o Paallel Pojecion If he diecions of pojecion ae paallel o each ohe and ohogonal o he image plane, he pojecion of he 3D poins ono D peseves angles, lenghs and aeas. Such a pojecion is called as ohogaphic o paallel pojecion. The weak pespecive pojecion is a scaled fom of an ohogaphic pojecion. Diecions of pojecion ae paallel implies infinie focal lengh (cene of pojecion is ve fa awa fom he image plane). In such cases, = X, = Y.
41 Ohogaphic o Paallel Pojecion hp:// /546-s9/www/lec/6/lec6.pdf

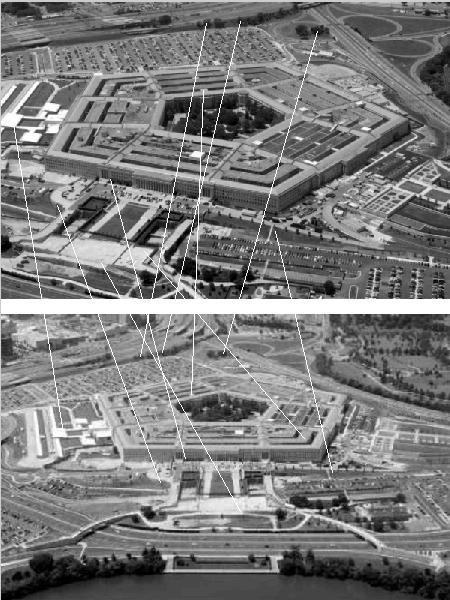
42 Vanishing Poins
43 Vanishing Poins P=(X,Y,Z) Line L = (l,l,lz) p=(,,z=f) o VL f O Z Line paallel o L passing hough O inesecs he image plane a poin VL his is called as he vanishing poin fo line L. The vanishing poin of line L unde pespecive pojecion is basicall he pojecion of an infiniel disan poin on L ono he image plane. π Two paallel lines in objec space will have he same vanishing poin. I is fo his eason ha images of paallel lines unde pespecive pojecion appea o inesec.
44 Vanishing Poins P=(X,Y,Z) p=(,,z=f) π O f Z o Line L = (l,l,l z ) VL z VL z VL z z z l l f l l f l Z l Y f l Z l X f Z X f l Z Z l Y Y l X X ) ( lim, ) ( lim ) (, ) ( ) ( ) ( ) (, ) (, ) (

45 hp:// hp://
. In such cases, hee is no vanishing poin, o we have a vanishing poin a infini. hp://plus.mahs.")
46 z VL z VL z z z l l f l l f l Z l Y f l Z l X f Z X f l Z Z l Y Y l X X ) ( lim, ) ( lim ) (, ) ( ) ( ) ( ) (, ) (, ) ( If l z =, i means he se of oiginal paallel lines in 3D space lie in a plane paallel o he image plane (which is ofen he XY plane). In such cases, hee is no vanishing poin, o we have a vanishing poin a infini. hp://plus.mahs.og/conen/geing-picue
47 Vanishing Lines Conside wo o moe ses of paallel lines in 3D space ling on he same plane. The vanishing poins of all hese ses of lines ae collinea (wh?). This line conaining all hese vanishing poins is called he vanishing line. If he plane involved is he gound plane, hen he vanishing line is called he hoizon.
48 Fom slides b Fank Dallae
49 Camea Calibaion
50 Fom D o 3D? Given piel coodinaes of some poins in an image, we wan o infe he 3D coodinaes of he undeling objec poins. Fo his, we need o know () he elaionship beween he camea coodinae ssem and he wold coodinae ssem, and () he elaionship beween piel coodinaes and he acual coodinaes of he D image poins (in he camea coodinae ssem).
51 Fom D o 3D? Wha is he wold coodinae ssem? I is a coodinae ssem chosen b he use (sa he designe of an envionmen fo a obo o avel, he achiec of a building, ec). I is picall diffeen fom he camea coodinae ssem.
52 Fom D o 3D? The oienaion and posiion of he camea coodinae ssem wih espec o he wold coodinae ssem is given b he einsic camea paamees. The elaionship beween he image coodinaes and hei epesenaion in ems of piels is given b he ininsic camea paamees.
53 Fom D o 3D? The einsic and ininsic paamees ae unknown. The can be deemined using a pocess called as (geomeic) camea calibaion.
54 Camea calibaion: wh? Given picues fom a calibaed camea (o a se of calibaed cameas), we can econsuc pas of he undeling 3D scene. We can esimae vaious dimensions in 3D jus given he D image(s). This is all apa fom he fac ha we ge o esimae he camea esoluion, focal lengh, ec. (in seveal cases, hese paamees ma be unknown!).
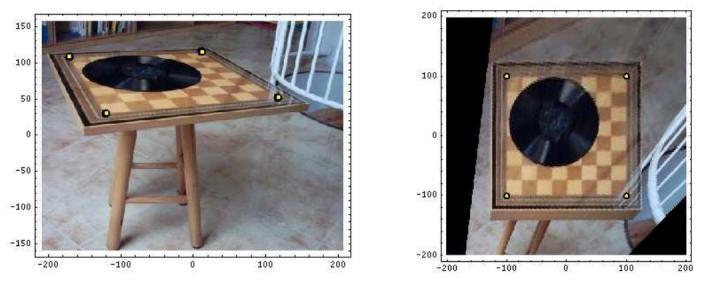
55 Camea calibaion: how? To pefom calibaion, we ake phoogaphs of an objec whose geome is known and which will poduce salien feaue poins in an image. Eample: checkeboad cube. Such an objec is called calibaion objec.
.")
56 We will measue he 3D coodinaes of vaious juncion poins (maked ellow) of such a calibaion objec. Ideall, we would diecl like o epess hese coodinaes in ems of he oigin of he camea coodinae ssem (i.e. wih espec o he poin O in he pevious slides). Bu ha is no phsicall possible, so we epess he coodinaes wih espec o an oigin O ha we choose. Eample: i could be he boom lef cone of he checkeboad paen (maked hee as a ed cicle). This is he wold coodinae ssem. Secondl, we will measue he coodinaes of he piel locaions of he vaious juncion poins fom he image ha we capued wih he camea. Thus fo each of he N juncion poins, we have he piel coodinaes as well as he wold coodinaes. Fom his, we have o deive he einsic and ininsic paamees of he camea.
57 Einsic paamees w w w c c c z Z Y X Z Y X w c w c P P R P P,, ), ( The einsic camea paamees ae picall unknown. The accoun fo 6 degees of feedom (i.e. 6 unknowns) wh? Coodinaes of phsical poin P in ems of wold coodinae ssem (his is measued phsicall, e.g. wih a measuing ape) Coodinaes of phsical poin P in ems of camea coodinae ssem
58 Einsic paamees Noe: he wold coodinae ssem and he camea coodinae ssem ae no aligned. R and epesen he oaion and anslaion (especivel) ha akes ou fom he wold coodinae ssem o he camea coodinae ssem.
59 Ininsic paamees The elaionship beween image coodinaes and piel coodinaes is given as: ( o ) s, ( o ) s im im Coodinaes of opical cene in ems of piels Piel aspec aio The ohe ininsic camea paamee is he focal lengh f. Ininsic paamees ae also unknown! The accoun fo 5 degees of feedom.
60 Thee main equaions and a new one im im s o s o ) (, ) ( z w w w c c c Z Y X Z Y X R c c c c Z Y f Z X f, ) ( ) ( ) ( ) ( ) ( ) ( 3 3 P R P R P R P R w w w w f s o f s o im im R R R R Row of he mai R c c im c c im Z Y f s o Z X f s o ) ( ) (
61 Pojecion equaion in mai fom z z Z Y X o s f o s f z im im w w w ˆ ˆ, ˆ ˆ, ˆ ˆ ˆ R R R in M e M ) ( ) ( ) ( ) ( ) ( ) ( 3 3 P R P R P R P R w w w w f s o f s o im im Ininsic camea mai (3 3) Einsic camea mai (3 4) M = 3 4 camea mai
62 Camea Calibaion i i im i i i im i w i w i w i i i i z z Z Y X o s f o s f z N i i ˆ ˆ, ˆ ˆ, ˆ ˆ ˆ,,,,,,, R R R unknowns.,i.e.,,,,,,,,esimae and Given,,, i,, R N i w i w i w i N im i im i o o s s f Z Y X
63 Camea Calibaion Conside he equaions, wo fo each of he N poins: i i im, i im, i o o f s f s R P R P 3 R P R P 3 w, i w, i w, i w, i z Refe o lecue scans and ebook b Tucco and Vei (secion 6. and 6..) fo he wo diffeen calibaion pocedues. z Noe: In he above equaions, we have = -R., = -R., z = -R 3. f f 3 3 X X X X w, i w, i w, i w, i 3 Y Y 3 w, i w, i Y Y w, i w, i 3 33 Z 3 Z 33 w, i Z w, i Z w, i w, i z z
!")
64 Camea calibaion: Image cene The fis calibaion pocedue menioned in he lecues ields all paamees ecep fo he coodinaes of he image cene, given b (o,o ). To find he image cene, we compue he vanishing poins of hee muuall pependicula ses of lines. The hee vanishing poins fom a iangle, and he image cene uns ou o be he ohocene of ha iangle (i.e. poin whee he hee aliudes of he iangle mee)! The second calibaion pocedue deemines he image cene as well.
65 Fis pocedue (b Tsai, secions 6.. o 6..3 of Tucco and Vei) I eplicil finds he camea paamees duing calibaion. Given N 8 pais of poins, i ses up an equaion of he fom Av = whee A has size N 8 and conains funcions of known coodinaes, and v is an 8 veco of unknown values. The soluion v is obained (up o an unknown scala and sign) as he eigenveco of A T A wih he leas (o zeo) eigenvalue. (In he noise-fee case, A has ank 7.) The camea paamees ae deived fom v as menioned in he book. The opical cene (o,o ) is sepaael esimaed using he ohocene pope of vanishing poins, and his esimae mus be given as inpu o his mehod.
66 Second pocedue (b Faugeas and Toscani, secion 6.3 of Tucco and Vei) I seeks o diecl find he camea mai M (which is a 3 4 mai). The camea mai M has onl degees of feedom (wh?). The camea mai is found b seing up an equaion of he fom Am = whee m is a veco conaining he enies of M, and A is a N mai. Veco m is compued (up o an unknwon scale and sign) as he eigenveco of A T A wih he leas (ideall zeo) eigenvalue.
67 Second pocedue (b Faugeas and Toscani, secion 6.3 of Tucco and Vei) Veco m is eshaped o ge a 3 4 mai M. The unknown scale and sign need no bohe us (wh?) Wha if we waned o find he ininsic and einsic paamees? The book b Tucco and Vei gives one mehod fo his. In he ne slide, we will see anohe mehod!
68 Second pocedue (b Faugeas and Toscani) using RQ facoizaion Recall ha he camea mai is given as: f s M M M i n e M f s i n o o ( R R) 3 3 ( M i n R M R R R3 R) Conside he RQ decomposiion of he 3 3 submai G, G = G u G o whee G u is uppe iangula and G o is ohonomal. i n ( G g) Uppe iangula!
69 Second pocedue (b Faugeas and Toscani) This RQ decomposiion alwas eiss and is unique fo a full-ank mai (which G is). The RQ decomposiion is deived fom he moe popula QR decomposiion which also alwas eiss fo an mai, and is unique fo a full-ank mai. Code (Te): ReveseRows = [ ; ; ]; [Q R] = q((reveserows * A)'); R = ReveseRows * R' * ReveseRows; Q = ReveseRows * Q'; hps://
70 Second pocedue (b Faugeas and Toscani) The afoemenioned RQ decomposiion can be used o deemine M in and R. The anslaion veco = R T (M in ) - g (see pevious slides). This mehod gives us f, f, o and o as well as R and. Noice ha (o, o ) need no be sepaael esimaed unlike mehod.
71 Using Calibaed Cameas
72 Deemining deph Le p be he image of poin P capued using a calibaed camea C wih 3 4 known pojecion mai M. Hence we have: Given jus he image poin coodinaes, we can onl deemine he 3D diecion on which he objec poin lies. This diecion is given as (u,v,f), whee: ˆ ˆ, ˆ ˆ, ˆ ˆ ˆ z v z u Z Y X z w w w w M M P p ˆ ˆ, ˆ ˆ z v z u
73 Deemining deph To deemine he eac locaion, we will need anohe calibaed camea. Le p be he image of he same poin P capued using calibaed camea C wih 3 4 known pojecion mai M. Hence we have: We again deemine he 3D diecion on which he objec poin lies. This diecion is given as (u,v,f), whee: The inesecion of he wo diecions ields he 3D coodinae of he poin. ˆ ˆ, ˆ ˆ, ˆ ˆ ˆ z v z u Z Y X z w w w w M M P p ˆ ˆ, ˆ ˆ z v z u
74 P p p O O
75 Coss-Raios: Pojecive Invaians
76 Measuing Heigh using Coss-Raios Conside fou collinea poins A, B, C, D (in ha ode). The following quani is called he coss-aio of A, B, C, D: coss AC BD aio( A, B, C, D) AD BC AC AD / / BC BD A B C D
77 Coss-Raio: Pojecive invaian Coss-aios ae invaian unde pespecive pojecion, i.e. he coss aio of fou collinea in 3D = coss aio of hei pojecions (i.e., images) ono a D image plane! We will pove his algebaicall in class! A geomeic poof is on he ne slide. Recall lenghs, aeas, aios of lenghs, aios of aeas ae no peseved unde pespecive pojecion (aios of lenghs and aeas ae peseved unde affine ansfomaion).
 and ha of he poins (A,B,C,D ) in he figue below ae equal. hp://www.cu-he-kno.")
78 Coss aio: pojecive invaian Thee eiss a beauiful heoem in geome which sas ha he coss aio of he poins (A,B,C,D) and ha of he poins (A,B,C,D ) in he figue below ae equal. hp:// Raio.shml
79 Coss aio: pojecive invaian Now conside 4 collinea poins A,B,C,D in 3D space whose images on he image plane as A,B,C,D. Then cleal lines AA, BB, CC, DD inesec a poin M which is he cene of pojecion. Invoking he heoem poves ou esul!
80 v p O c Image plane b C R B Gound plane Poin whose heigh BC is o be deemined Refeence poin whose heigh BR is known coss aio( B, R, C, ) BC BR RC RC RC bc vp bv c Measuing Heigh using Coss-Raios p BC R B RC RC is unknown es ae known


81 Slide aken fom Deek Hoiem (UIUC) Inspied b he PhD hesis of Anonio Ciminisi Accuae Visual Meolog fgom Single and Muliple Uncalibaed Images, Univesi of Ofod, 999

82 Slide aken fom Deek Hoiem (UIUC) Inspied b he PhD hesis of Anonio Ciminisi Accuae Visual Meolog fgom Single and Muliple Uncalibaed Images, Univesi of Ofod, 999 v z Noe: Refe o ne slide fo eplanaion. Line bb is NOT necessail paallel o lines in G. L v v v H R H G vanishing line (hoizon) Refeence diecion G b b vz ( R H) b v R Z R H R
83 Inpu: an image of a peson sanding ne o a building o a sucue whose heigh R is known. To deemine: heigh of he peson (H) fom he image. Assumpion : he building is in he so called efeence diecion wih vanishing poin (called v z - which will lie a if his diecion is paallel o camea plane). Assumpion : We ae able o find wo ses of paallel lines (called G and G ) on he gound plane. Thei coesponding vanishing poins fom he hoizon. Poins b and b ae boh on he gound plane. Conside a line (sa L) passing hough and paallel o line bb. The images of L and bb will inesec a a poin on he hoizon (wh? Because bb is coplana wih G and G, and vanishing poins of coplana lines ae collinea). Le s call his poin v.
84 Now line v (i.e. L) is paallel o bb in 3D space. Also line v inesecs he efeence diecion a poin. Hence in 3D space, b = b = unknown heigh H (on he image plane, of couse hei lenghs ae diffeen). Now use he coss-aio invaiance pope o find H: b v v Z Z R H R
85 Algoihm Find he vanishing poin in he efeence diecion v z. Find he hoizon line b joining he vanishing poins of wo pais of paallel lines on he gound plane. Find he poin of inesecion (v) of he hoizon wih he line joining he base of he building (b) and he poin whee he peson is sanding (b ). Find he poin of inesecion () of he line v ( = peson s head) wih efeence diecion. Use he coss-aio fomula o deemine he heigh of he peson.
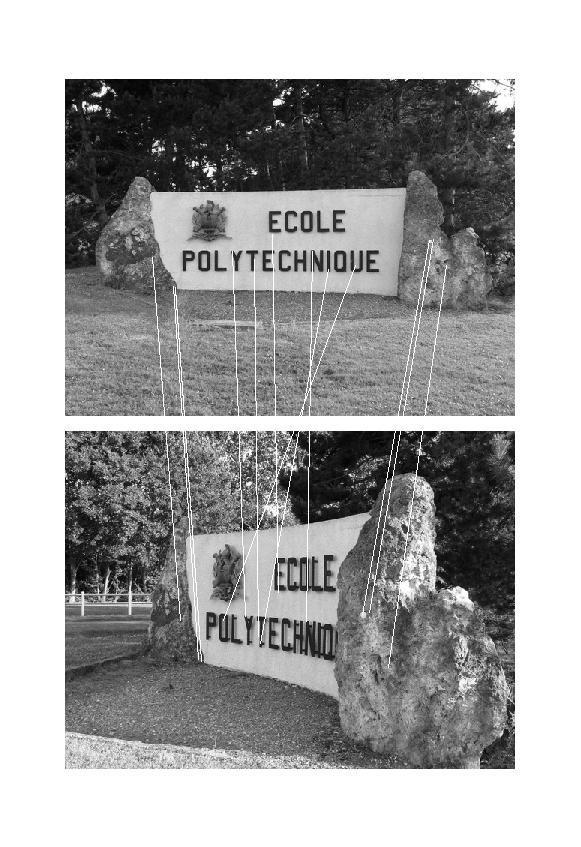
86 Plana Homogaph
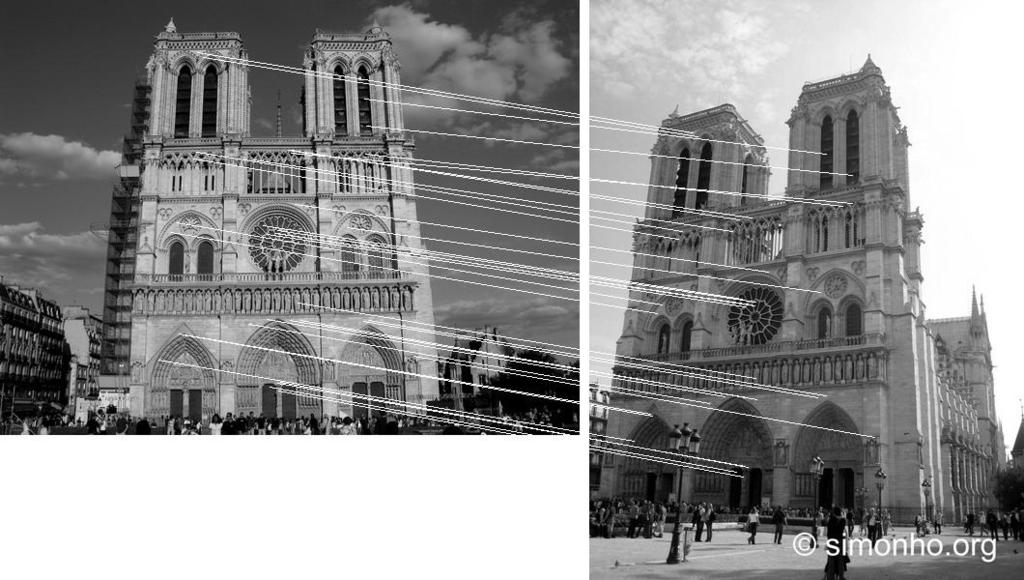
87 Plana Homogaph Conside a plana objec in 3D space, imaged b wo cameas. The coodinaes of coesponding poins in he wo images ae said o be elaed b a plana homogaph. This elaionship can be deemined wihou calibaing eihe camea.
88 P Plane π p p O O

89
90 Plana Homogaph (wih homogeneous coodinaes) Le equaion of plane π be ax + by +cz + =, i.e. [N ]P = whee N = (a,b,c) is he veco (in 3D) nomal o he plane and P = (X,Y,Z,) in he coodinae ssem of he fis camea. The coodinaes of is image in he fis camea (in coodinae ssem of fis camea) ae given b: X u Y p v M MP Z fw M is he einsic (34) mai fo he fis camea. Noe ha he image coodinaes coesponding o P ae (u /w,v /w,f) which in a diecional sense is equivalen o (u /(fw ), v /(fw ),).
91 Plana Homogaph (wih homogeneous coodinaes) Cleal P lies on a a fom he pinhole (oigin) o he poin p in 3D space. Hence we can sa ha P u v fw k au bv cfw k Np k I P N p I has size 3 3, N has size 3, so i is a 4 3 mai The (X,Y,Z) coodinaes of P can be epessed as (u /k,v /k,fw /k). The homogeneous coodinae k can be inepeed as a paamee which ells ou eacl whee on he line fom he pinhole o p, ou poin P lies. In geneal, his k would be unknown, bu hee we have moe infomaion ha P lies on a plane whose equaion is known. This would ield au /k + bv /k + cfw /k + =, i.e. au + bv + cfw + k =.
92 Plana Homogaph (wih homogeneous coodinaes) Fo he second camea, we have:, Hp p N I M p p N I M M P M M M p ~ ~ ~ ' ' ' Z Y X Z Y X fw v u H is a 3 3 mai, as M~ is a 3 4 mai, and (I;-N) is a 4 3 mai. Noe: Le (X,Y,Z,) be he coodinaes of poin P in he coodinae fame of he second camea. p is he coodinae of is image again in he ssem of he second camea. Mai M is he einsic (34) mai fo he second camea and 4 4 mai M, conains suiable einsic paamees o align he coodinae ssems of he fis camea o ha of he second camea.
93 Plana Homogaph (wih homogeneous coodinaes) The pevious elaionship was beween he coodinaes of he images of P: p in he fis camea s coodinae ssem, and p in he second camea s coodinae ssem. Wha abou a simila elaionship in he especive image coodinae ssems? p M p Hp -,in, im p, im M HM,in HM,in,in p p, im, im Hp ˆ, im M,in and M,in ae ininsic (33) camea maices giving he elaion beween he coodinaes of a poin in camea coodinae ssem and image coodinae ssem. This is also a 3 3 mai which elaes he image coodinaes in he wo images (in hei especive image coodinae ssems bu wih homogeneous coodinaes)
94 Plana Homogaph Given wo images of a coplana scene aken fom wo diffeen (uncalibaed) cameas, how will ou deemine he plana homogaph mai H (ahe H^)? How man poin coespondences will ou equie? The answe is 4 so ha we have a leas 8 equaions fo he 8 degees of feedom. p ˆ, im v Hp, im, im, im u w Hˆ Hˆ Hˆ Hˆ 3 3 u u u u Hˆ Hˆ Hˆ Hˆ 3 3 v v v v Hˆ Hˆ ˆ H3 Hˆ 3w Hˆ w Hˆ Hˆ w w Hˆ Hˆ Hˆ 3 Hˆ Hˆ Hˆ Hˆ 3 3 Hˆ Hˆ Hˆ, im, im, im, im u v w Hˆ Hˆ Hˆ Hˆ 3 3, im, im, im, im Hˆ Hˆ Hˆ Hˆ ,, im u w,, im v w
95 hp:// demo.hml
96 , im, i, im, i, im, i, im, i, im, i Ah, A Hˆ Hˆ 3 3, im, i, im, i, im, i, im, i, im, i Hˆ Hˆ 3 Hˆ Hˆ Plana Homogaph, 3, im, i, im, i, im, i 33 33, im, i Reaanging hese equaions, we ge: Hˆ has size N 9, h has size 9, im, i, im, i Hˆ Hˆ, im, i, im, i, im, i, im, i, im, i, im, i Hˆ Hˆ Hˆ Hˆ, im, i, im, i 3 3, im, i, im, i, im i, im, i Hˆ Hˆ ˆ H ˆ H Hˆ ˆ H ˆ H ˆ H Thee will be N such pais of equaions (i.e. oall N equaions), given N pais of coesponding poins in he wo images The equaion Ah = will be solved b compuing he SVD of A, i.e. A = USV T. The veco h will be given b he singula veco in V, coesponding o he null singula value (in he ideal case) o he leas singula value. This is equivalen o he eigenveco of A T A wih he leas eigenvalue. In he ideal case, A has ank 8 and hence he eac soluion eiss. In he non-ideal case, hee is no h such ha Ah =, so we find an appoimae soluion, i.e. a soluion fo which Ah is small in magniude.
97 Plana Homogaph Alhough hee ae 9 enies in he mai, hee ae onl 8 degees of feedom. You can see his if ou divide he numeao and denominao of he following equaions b H^33. Hˆ Hˆ Hˆ Hˆ 3 3 Hˆ Hˆ Hˆ Hˆ 3 3 Hˆ Hˆ Hˆ Hˆ ~ ~ ~ H H H ~ ~ H3 H3 ~ ~ ~ H H H ~ ~ H H 3 The numbe of poin coespondences equied is a leas
98 Plana homogaph I is a moion model ha is moe geneal han D affine ansfomaions! Noe: in he deivaion, make sue ou undesand ha he planai of he objec being imaged, is ciical. Ohewise ou need a moion model moe complicaed han a homogaph! Again noe: ou do no need calibaed cameas (i.e. he coesponding poins ae in ems of image coodinaes, i.e. in piels), and ou do no need o know he ininsic o einsic camea paamees in ode o deemine he homogaph. The homogaph ansfomaion has 8 degees of feedom and is moe geneal han he affine ansfomaion which has onl 6 degees of feedom. Obseve he homogaph mai on he pevious slides in an affine ansfomaion, H 3 and H 3 would be.
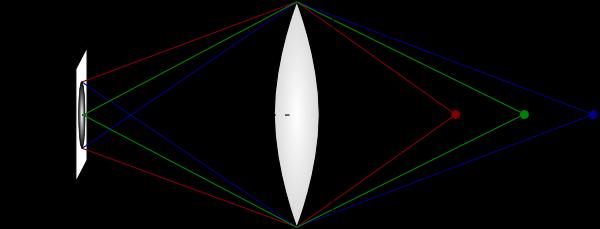
99 Adding a Lens
100 Pinhole Camea o Camea wih Lens Wih a lage pinhole, he image spo is lage, esuling in a blu image. Wih a small pinhole, ligh is educed esuling in a shap bu nois image Wih a simple lens, much moe ligh can be bough ino shap focus. hp://en.wikipedia.og/wiki/camea_lens
101 Thin convegen lens: Opical ais Sos passing hough he opical cene O of he lens and nomal o he plane of he lens All as of ligh fom objec poin (sa) P paallel o he opical ais pass hough he pincipal focus F afe efacion. The a of ligh fom P hough O passes wihou efacion. Bu all as of ligh emanaing fom P passing hough he lens ae focused ono a single poin p he image of P (if poin P was in focus).
.")

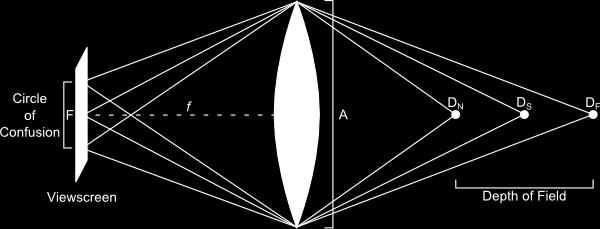
102 Camea Lens: Focal Lengh, Apeue hp://en.wikipedia.og/wiki/cicle_of_confusion A lens focusses ligh ono a senso (o phoo-film). The disance beween he cene of he lens and he pincipal focus is called focal lengh. This disance is changed as he shape of he lens changes. Defocussed poins map ono a cicle of confusion on he senso. Focal lengh affecs magnificaion. Lage focal lenghs ield smalle fields of view bu moe magnificaion. Small focal lenghs ield lage fields of view bu less magnificaion.
.")
103 Camea: Apeue A wide apeue (above) allows fo a lage shue speed han a smalle apeue (below) fo he same amoun of eposue (o he same amoun of ligh eneing he camea). Lowe shue speed = suscepibili o moion blu
104 Deph of field The images of some objec poins can appea blu. The amoun of blu depends on he disance beween he objec poin and he camea plane (i.e. deph of he poin). The ange of dephs fo which he level of blu is accepable o he human ee (o which appea accepabl shap) is called as deph of field.

105


106 Apeue and deph of field Lage apeue = shallowe DOF, as adii of cicle of confusion incease apidl Smalle apeue = moe eensive DOF, as adii of cicle of confusion incease moe slowl hp://
107 Downside of using a lens I causes adial disoion saigh lines in 3D can ge mapped ono cuved lines in D, and his effec is much moe jaing nea he image bodes.
108 Downside of using a lens The elaionship beween he disoed and undisoed coodinaes is appoimaed b: k and k ae (ea!) ininsic paamees of he camea. The associaed calibaion pocedue is now moe complicaed. 4 4 ) ( ) ( ) )( ( ) )( ( u u u d u d o o k k o o k k o o ( u, u ) = undisoed coodinaes ( d, d ) = disoed coodinaes

109 The Human Ee as a Camea Phoo-film Lens Camea apeue Appaaus o adjus widh of camea apeue hp://en.wikipedia.og/wiki/file:blausen_388_eeanaom_.png
110 Summa Affine Tansfomaions in D and 3D Pinhole camea, pespecive pojecions Vanishing poins Camea Calibaion Coss-aios Plana homogaph Adding in a lens
Projection of geometric models
 ojecion of geomeic moels Copigh@, YZU Opimal Design Laboao. All ighs eseve. Las upae: Yeh-Liang Hsu (-9-). Noe: his is he couse maeial fo ME55 Geomeic moeling an compue gaphics, Yuan Ze Univesi. a of his
ojecion of geomeic moels Copigh@, YZU Opimal Design Laboao. All ighs eseve. Las upae: Yeh-Liang Hsu (-9-). Noe: his is he couse maeial fo ME55 Geomeic moeling an compue gaphics, Yuan Ze Univesi. a of his
Orthotropic Materials
 Kapiel 2 Ohoopic Maeials 2. Elasic Sain maix Elasic sains ae elaed o sesses by Hooke's law, as saed below. The sesssain elaionship is in each maeial poin fomulaed in he local caesian coodinae sysem. ε
Kapiel 2 Ohoopic Maeials 2. Elasic Sain maix Elasic sains ae elaed o sesses by Hooke's law, as saed below. The sesssain elaionship is in each maeial poin fomulaed in he local caesian coodinae sysem. ε
KINEMATICS OF RIGID BODIES
 KINEMTICS OF RIGID ODIES In igid body kinemaics, we use he elaionships govening he displacemen, velociy and acceleaion, bu mus also accoun fo he oaional moion of he body. Descipion of he moion of igid
KINEMTICS OF RIGID ODIES In igid body kinemaics, we use he elaionships govening he displacemen, velociy and acceleaion, bu mus also accoun fo he oaional moion of he body. Descipion of he moion of igid
Projection of geometric models
 ojecion of geomeic moels Eie: Yeh-Liang Hsu (998-9-2); ecommene: Yeh-Liang Hsu (2-9-26); las upae: Yeh-Liang Hsu (29--3). Noe: This is he couse maeial fo ME55 Geomeic moeling an compue gaphics, Yuan Ze
ojecion of geomeic moels Eie: Yeh-Liang Hsu (998-9-2); ecommene: Yeh-Liang Hsu (2-9-26); las upae: Yeh-Liang Hsu (29--3). Noe: This is he couse maeial fo ME55 Geomeic moeling an compue gaphics, Yuan Ze
Today - Lecture 13. Today s lecture continue with rotations, torque, Note that chapters 11, 12, 13 all involve rotations
 Today - Lecue 13 Today s lecue coninue wih oaions, oque, Noe ha chapes 11, 1, 13 all inole oaions slide 1 eiew Roaions Chapes 11 & 1 Viewed fom aboe (+z) Roaional, o angula elociy, gies angenial elociy
Today - Lecue 13 Today s lecue coninue wih oaions, oque, Noe ha chapes 11, 1, 13 all inole oaions slide 1 eiew Roaions Chapes 11 & 1 Viewed fom aboe (+z) Roaional, o angula elociy, gies angenial elociy
Relative and Circular Motion
 Relaie and Cicula Moion a) Relaie moion b) Cenipeal acceleaion Mechanics Lecue 3 Slide 1 Mechanics Lecue 3 Slide 2 Time on Video Pelecue Looks like mosly eeyone hee has iewed enie pelecue GOOD! Thank you
Relaie and Cicula Moion a) Relaie moion b) Cenipeal acceleaion Mechanics Lecue 3 Slide 1 Mechanics Lecue 3 Slide 2 Time on Video Pelecue Looks like mosly eeyone hee has iewed enie pelecue GOOD! Thank you
, on the power of the transmitter P t fed to it, and on the distance R between the antenna and the observation point as. r r t
 Lecue 6: Fiis Tansmission Equaion and Rada Range Equaion (Fiis equaion. Maximum ange of a wieless link. Rada coss secion. Rada equaion. Maximum ange of a ada. 1. Fiis ansmission equaion Fiis ansmission
Lecue 6: Fiis Tansmission Equaion and Rada Range Equaion (Fiis equaion. Maximum ange of a wieless link. Rada coss secion. Rada equaion. Maximum ange of a ada. 1. Fiis ansmission equaion Fiis ansmission
Sections 3.1 and 3.4 Exponential Functions (Growth and Decay)
") Secions 3.1 and 3.4 Eponenial Funcions (Gowh and Decay) Chape 3. Secions 1 and 4 Page 1 of 5 Wha Would You Rahe Have... $1million, o double you money evey day fo 31 days saing wih 1cen? Day Cens Day Cens
Secions 3.1 and 3.4 Eponenial Funcions (Gowh and Decay) Chape 3. Secions 1 and 4 Page 1 of 5 Wha Would You Rahe Have... $1million, o double you money evey day fo 31 days saing wih 1cen? Day Cens Day Cens
Lecture 17: Kinetics of Phase Growth in a Two-component System:
 Lecue 17: Kineics of Phase Gowh in a Two-componen Sysem: descipion of diffusion flux acoss he α/ ineface Today s opics Majo asks of oday s Lecue: how o deive he diffusion flux of aoms. Once an incipien
Lecue 17: Kineics of Phase Gowh in a Two-componen Sysem: descipion of diffusion flux acoss he α/ ineface Today s opics Majo asks of oday s Lecue: how o deive he diffusion flux of aoms. Once an incipien
Lecture 22 Electromagnetic Waves
 Lecue Elecomagneic Waves Pogam: 1. Enegy caied by he wave (Poyning veco).. Maxwell s equaions and Bounday condiions a inefaces. 3. Maeials boundaies: eflecion and efacion. Snell s Law. Quesions you should
Lecue Elecomagneic Waves Pogam: 1. Enegy caied by he wave (Poyning veco).. Maxwell s equaions and Bounday condiions a inefaces. 3. Maeials boundaies: eflecion and efacion. Snell s Law. Quesions you should
MEEN 617 Handout #11 MODAL ANALYSIS OF MDOF Systems with VISCOUS DAMPING
 MEEN 67 Handou # MODAL ANALYSIS OF MDOF Sysems wih VISCOS DAMPING ^ Symmeic Moion of a n-dof linea sysem is descibed by he second ode diffeenial equaions M+C+K=F whee () and F () ae n ows vecos of displacemens
MEEN 67 Handou # MODAL ANALYSIS OF MDOF Sysems wih VISCOS DAMPING ^ Symmeic Moion of a n-dof linea sysem is descibed by he second ode diffeenial equaions M+C+K=F whee () and F () ae n ows vecos of displacemens
ENGI 4430 Advanced Calculus for Engineering Faculty of Engineering and Applied Science Problem Set 9 Solutions [Theorems of Gauss and Stokes]
![ENGI 4430 Advanced Calculus for Engineering Faculty of Engineering and Applied Science Problem Set 9 Solutions [Theorems of Gauss and Stokes]](/thumbs/91/106162145.jpg "ENGI 4430 Advanced Calculus for Engineering Faculty of Engineering and Applied Science Problem Set 9 Solutions [Theorems of Gauss and Stokes]") ENGI 44 Avance alculus fo Engineeing Faculy of Engineeing an Applie cience Poblem e 9 oluions [Theoems of Gauss an okes]. A fla aea A is boune by he iangle whose veices ae he poins P(,, ), Q(,, ) an R(,,
ENGI 44 Avance alculus fo Engineeing Faculy of Engineeing an Applie cience Poblem e 9 oluions [Theoems of Gauss an okes]. A fla aea A is boune by he iangle whose veices ae he poins P(,, ), Q(,, ) an R(,,
 WORK POWER AND ENERGY Consevaive foce a) A foce is said o be consevaive if he wok done by i is independen of pah followed by he body b) Wok done by a consevaive foce fo a closed pah is zeo c) Wok done
WORK POWER AND ENERGY Consevaive foce a) A foce is said o be consevaive if he wok done by i is independen of pah followed by he body b) Wok done by a consevaive foce fo a closed pah is zeo c) Wok done
Lecture 18: Kinetics of Phase Growth in a Two-component System: general kinetics analysis based on the dilute-solution approximation
 Lecue 8: Kineics of Phase Gowh in a Two-componen Sysem: geneal kineics analysis based on he dilue-soluion appoximaion Today s opics: In he las Lecues, we leaned hee diffeen ways o descibe he diffusion
Lecue 8: Kineics of Phase Gowh in a Two-componen Sysem: geneal kineics analysis based on he dilue-soluion appoximaion Today s opics: In he las Lecues, we leaned hee diffeen ways o descibe he diffusion
Computer Propagation Analysis Tools
 Compue Popagaion Analysis Tools. Compue Popagaion Analysis Tools Inoducion By now you ae pobably geing he idea ha pedicing eceived signal sengh is a eally impoan as in he design of a wieless communicaion
Compue Popagaion Analysis Tools. Compue Popagaion Analysis Tools Inoducion By now you ae pobably geing he idea ha pedicing eceived signal sengh is a eally impoan as in he design of a wieless communicaion
The Production of Polarization
 Physics 36: Waves Lecue 13 3/31/211 The Poducion of Polaizaion Today we will alk abou he poducion of polaized ligh. We aleady inoduced he concep of he polaizaion of ligh, a ansvese EM wave. To biefly eview
Physics 36: Waves Lecue 13 3/31/211 The Poducion of Polaizaion Today we will alk abou he poducion of polaized ligh. We aleady inoduced he concep of he polaizaion of ligh, a ansvese EM wave. To biefly eview
CSE590B Lecture 4 More about P 1
 SE590 Lece 4 Moe abo P 1 Tansfoming Tansfomaions James. linn Jimlinn.om h://coses.cs.washingon.ed/coses/cse590b/13a/ Peviosly On SE590b Tansfomaions M M w w w w w The ncion w w w w w w 0 w w 0 w 0 w The
SE590 Lece 4 Moe abo P 1 Tansfoming Tansfomaions James. linn Jimlinn.om h://coses.cs.washingon.ed/coses/cse590b/13a/ Peviosly On SE590b Tansfomaions M M w w w w w The ncion w w w w w w 0 w w 0 w 0 w The
General Non-Arbitrage Model. I. Partial Differential Equation for Pricing A. Traded Underlying Security
 1 Geneal Non-Abiage Model I. Paial Diffeenial Equaion fo Picing A. aded Undelying Secuiy 1. Dynamics of he Asse Given by: a. ds = µ (S, )d + σ (S, )dz b. he asse can be eihe a sock, o a cuency, an index,
1 Geneal Non-Abiage Model I. Paial Diffeenial Equaion fo Picing A. aded Undelying Secuiy 1. Dynamics of he Asse Given by: a. ds = µ (S, )d + σ (S, )dz b. he asse can be eihe a sock, o a cuency, an index,
PHYS PRACTICE EXAM 2
 PHYS 1800 PRACTICE EXAM Pa I Muliple Choice Quesions [ ps each] Diecions: Cicle he one alenaive ha bes complees he saemen o answes he quesion. Unless ohewise saed, assume ideal condiions (no ai esisance,
PHYS 1800 PRACTICE EXAM Pa I Muliple Choice Quesions [ ps each] Diecions: Cicle he one alenaive ha bes complees he saemen o answes he quesion. Unless ohewise saed, assume ideal condiions (no ai esisance,
156 There are 9 books stacked on a shelf. The thickness of each book is either 1 inch or 2
 156 Thee ae 9 books sacked on a shelf. The hickness of each book is eihe 1 inch o 2 F inches. The heigh of he sack of 9 books is 14 inches. Which sysem of equaions can be used o deemine x, he numbe of
156 Thee ae 9 books sacked on a shelf. The hickness of each book is eihe 1 inch o 2 F inches. The heigh of he sack of 9 books is 14 inches. Which sysem of equaions can be used o deemine x, he numbe of
Chapter 7. Interference
 Chape 7 Inefeence Pa I Geneal Consideaions Pinciple of Supeposiion Pinciple of Supeposiion When wo o moe opical waves mee in he same locaion, hey follow supeposiion pinciple Mos opical sensos deec opical
Chape 7 Inefeence Pa I Geneal Consideaions Pinciple of Supeposiion Pinciple of Supeposiion When wo o moe opical waves mee in he same locaion, hey follow supeposiion pinciple Mos opical sensos deec opical
Camera Models class 8
 Camea Models class 8 Mulile View Geomey Com 29-89 Mac ollefeys Mulile View Geomey couse schedule (subjec o change) Jan. 7, 9 Ino & moivaion ojecive 2D Geomey Jan. 4, 6 (no class) ojecive 2D Geomey Jan.
Camea Models class 8 Mulile View Geomey Com 29-89 Mac ollefeys Mulile View Geomey couse schedule (subjec o change) Jan. 7, 9 Ino & moivaion ojecive 2D Geomey Jan. 4, 6 (no class) ojecive 2D Geomey Jan.
An Automatic Door Sensor Using Image Processing
 An Auomaic Doo Senso Using Image Pocessing Depamen o Elecical and Eleconic Engineeing Faculy o Engineeing Tooi Univesiy MENDEL 2004 -Insiue o Auomaion and Compue Science- in BRNO CZECH REPUBLIC 1. Inoducion
An Auomaic Doo Senso Using Image Pocessing Depamen o Elecical and Eleconic Engineeing Faculy o Engineeing Tooi Univesiy MENDEL 2004 -Insiue o Auomaion and Compue Science- in BRNO CZECH REPUBLIC 1. Inoducion
MATHEMATICAL FOUNDATIONS FOR APPROXIMATING PARTICLE BEHAVIOUR AT RADIUS OF THE PLANCK LENGTH
 Fundamenal Jounal of Mahemaical Phsics Vol 3 Issue 013 Pages 55-6 Published online a hp://wwwfdincom/ MATHEMATICAL FOUNDATIONS FOR APPROXIMATING PARTICLE BEHAVIOUR AT RADIUS OF THE PLANCK LENGTH Univesias
Fundamenal Jounal of Mahemaical Phsics Vol 3 Issue 013 Pages 55-6 Published online a hp://wwwfdincom/ MATHEMATICAL FOUNDATIONS FOR APPROXIMATING PARTICLE BEHAVIOUR AT RADIUS OF THE PLANCK LENGTH Univesias
Lecture 5. Chapter 3. Electromagnetic Theory, Photons, and Light
 Lecue 5 Chape 3 lecomagneic Theo, Phoons, and Ligh Gauss s Gauss s Faada s Ampèe- Mawell s + Loen foce: S C ds ds S C F dl dl q Mawell equaions d d qv A q A J ds ds In mae fields ae defined hough ineacion
Lecue 5 Chape 3 lecomagneic Theo, Phoons, and Ligh Gauss s Gauss s Faada s Ampèe- Mawell s + Loen foce: S C ds ds S C F dl dl q Mawell equaions d d qv A q A J ds ds In mae fields ae defined hough ineacion
Reinforcement learning
 Lecue 3 Reinfocemen leaning Milos Hauskech milos@cs.pi.edu 539 Senno Squae Reinfocemen leaning We wan o lean he conol policy: : X A We see examples of x (bu oupus a ae no given) Insead of a we ge a feedback
Lecue 3 Reinfocemen leaning Milos Hauskech milos@cs.pi.edu 539 Senno Squae Reinfocemen leaning We wan o lean he conol policy: : X A We see examples of x (bu oupus a ae no given) Insead of a we ge a feedback
2-d Motion: Constant Acceleration
 -d Moion: Consan Acceleaion Kinemaic Equaions o Moion (eco Fom Acceleaion eco (consan eloci eco (uncion o Posiion eco (uncion o The eloci eco and posiion eco ae a uncion o he ime. eloci eco a ime. Posiion
-d Moion: Consan Acceleaion Kinemaic Equaions o Moion (eco Fom Acceleaion eco (consan eloci eco (uncion o Posiion eco (uncion o The eloci eco and posiion eco ae a uncion o he ime. eloci eco a ime. Posiion
Lecture-V Stochastic Processes and the Basic Term-Structure Equation 1 Stochastic Processes Any variable whose value changes over time in an uncertain
 Lecue-V Sochasic Pocesses and he Basic Tem-Sucue Equaion 1 Sochasic Pocesses Any vaiable whose value changes ove ime in an unceain way is called a Sochasic Pocess. Sochasic Pocesses can be classied as
Lecue-V Sochasic Pocesses and he Basic Tem-Sucue Equaion 1 Sochasic Pocesses Any vaiable whose value changes ove ime in an unceain way is called a Sochasic Pocess. Sochasic Pocesses can be classied as
Circular Motion. Radians. One revolution is equivalent to which is also equivalent to 2π radians. Therefore we can.
 1 Cicula Moion Radians One evoluion is equivalen o 360 0 which is also equivalen o 2π adians. Theefoe we can say ha 360 = 2π adians, 180 = π adians, 90 = π 2 adians. Hence 1 adian = 360 2π Convesions Rule
1 Cicula Moion Radians One evoluion is equivalen o 360 0 which is also equivalen o 2π adians. Theefoe we can say ha 360 = 2π adians, 180 = π adians, 90 = π 2 adians. Hence 1 adian = 360 2π Convesions Rule
CS 188: Artificial Intelligence Fall Probabilistic Models
 CS 188: Aificial Inelligence Fall 2007 Lecue 15: Bayes Nes 10/18/2007 Dan Klein UC Bekeley Pobabilisic Models A pobabilisic model is a join disibuion ove a se of vaiables Given a join disibuion, we can
CS 188: Aificial Inelligence Fall 2007 Lecue 15: Bayes Nes 10/18/2007 Dan Klein UC Bekeley Pobabilisic Models A pobabilisic model is a join disibuion ove a se of vaiables Given a join disibuion, we can
Representing Knowledge. CS 188: Artificial Intelligence Fall Properties of BNs. Independence? Reachability (the Bayes Ball) Example
 Example") C 188: Aificial Inelligence Fall 2007 epesening Knowledge ecue 17: ayes Nes III 10/25/2007 an Klein UC ekeley Popeies of Ns Independence? ayes nes: pecify complex join disibuions using simple local condiional
C 188: Aificial Inelligence Fall 2007 epesening Knowledge ecue 17: ayes Nes III 10/25/2007 an Klein UC ekeley Popeies of Ns Independence? ayes nes: pecify complex join disibuions using simple local condiional
( ) exp i ω b ( ) [ III-1 ] exp( i ω ab. exp( i ω ba
![( ) exp i ω b ( ) [ III-1 ] exp( i ω ab. exp( i ω ba](/thumbs/83/87856399.jpg "( ) exp i ω b ( ) [ III-1 ] exp( i ω ab. exp( i ω ba") THE INTEACTION OF ADIATION AND MATTE: SEMICLASSICAL THEOY PAGE 26 III. EVIEW OF BASIC QUANTUM MECHANICS : TWO -LEVEL QUANTUM SYSTEMS : The lieaue of quanum opics and lase specoscop abounds wih discussions
THE INTEACTION OF ADIATION AND MATTE: SEMICLASSICAL THEOY PAGE 26 III. EVIEW OF BASIC QUANTUM MECHANICS : TWO -LEVEL QUANTUM SYSTEMS : The lieaue of quanum opics and lase specoscop abounds wih discussions
The sudden release of a large amount of energy E into a background fluid of density
 10 Poin explosion The sudden elease of a lage amoun of enegy E ino a backgound fluid of densiy ceaes a song explosion, chaaceized by a song shock wave (a blas wave ) emanaing fom he poin whee he enegy
10 Poin explosion The sudden elease of a lage amoun of enegy E ino a backgound fluid of densiy ceaes a song explosion, chaaceized by a song shock wave (a blas wave ) emanaing fom he poin whee he enegy
ÖRNEK 1: THE LINEAR IMPULSE-MOMENTUM RELATION Calculate the linear momentum of a particle of mass m=10 kg which has a. kg m s
 MÜHENDİSLİK MEKANİĞİ. HAFTA İMPULS- MMENTUM-ÇARPIŞMA Linea oenu of a paicle: The sybol L denoes he linea oenu and is defined as he ass ies he elociy of a paicle. L ÖRNEK : THE LINEAR IMPULSE-MMENTUM RELATIN
MÜHENDİSLİK MEKANİĞİ. HAFTA İMPULS- MMENTUM-ÇARPIŞMA Linea oenu of a paicle: The sybol L denoes he linea oenu and is defined as he ass ies he elociy of a paicle. L ÖRNEK : THE LINEAR IMPULSE-MMENTUM RELATIN
P h y s i c s F a c t s h e e t
 P h y s i c s F a c s h e e Sepembe 2001 Numbe 20 Simple Hamonic Moion Basic Conceps This Facshee will:! eplain wha is mean by simple hamonic moion! eplain how o use he equaions fo simple hamonic moion!
P h y s i c s F a c s h e e Sepembe 2001 Numbe 20 Simple Hamonic Moion Basic Conceps This Facshee will:! eplain wha is mean by simple hamonic moion! eplain how o use he equaions fo simple hamonic moion!
Two-dimensional Effects on the CSR Interaction Forces for an Energy-Chirped Bunch. Rui Li, J. Bisognano, R. Legg, and R. Bosch
 Two-dimensional Effecs on he CS Ineacion Foces fo an Enegy-Chiped Bunch ui Li, J. Bisognano,. Legg, and. Bosch Ouline 1. Inoducion 2. Pevious 1D and 2D esuls fo Effecive CS Foce 3. Bunch Disibuion Vaiaion
Two-dimensional Effecs on he CS Ineacion Foces fo an Enegy-Chiped Bunch ui Li, J. Bisognano,. Legg, and. Bosch Ouline 1. Inoducion 2. Pevious 1D and 2D esuls fo Effecive CS Foce 3. Bunch Disibuion Vaiaion
BASIC ALGEBRA OF VECTORS
 Fomulae Fo u Vecto Algeba By Mi Mohammed Abbas II PCMB 'A' Impotant Tems, Definitions & Fomulae 01 Vecto - Basic Intoduction: A quantity having magnitude as well as the diection is called vecto It is denoted
Fomulae Fo u Vecto Algeba By Mi Mohammed Abbas II PCMB 'A' Impotant Tems, Definitions & Fomulae 01 Vecto - Basic Intoduction: A quantity having magnitude as well as the diection is called vecto It is denoted
Combinatorial Approach to M/M/1 Queues. Using Hypergeometric Functions
 Inenaional Mahemaical Foum, Vol 8, 03, no 0, 463-47 HIKARI Ld, wwwm-hikaicom Combinaoial Appoach o M/M/ Queues Using Hypegeomeic Funcions Jagdish Saan and Kamal Nain Depamen of Saisics, Univesiy of Delhi,
Inenaional Mahemaical Foum, Vol 8, 03, no 0, 463-47 HIKARI Ld, wwwm-hikaicom Combinaoial Appoach o M/M/ Queues Using Hypegeomeic Funcions Jagdish Saan and Kamal Nain Depamen of Saisics, Univesiy of Delhi,
Low-complexity Algorithms for MIMO Multiplexing Systems
 Low-complexiy Algoihms fo MIMO Muliplexing Sysems Ouline Inoducion QRD-M M algoihm Algoihm I: : o educe he numbe of suviving pahs. Algoihm II: : o educe he numbe of candidaes fo each ansmied signal. :
Low-complexiy Algoihms fo MIMO Muliplexing Sysems Ouline Inoducion QRD-M M algoihm Algoihm I: : o educe he numbe of suviving pahs. Algoihm II: : o educe he numbe of candidaes fo each ansmied signal. :
MECHANICS OF MATERIALS Poisson s Ratio
 Fouh diion MCHANICS OF MATRIALS Poisson s Raio Bee Johnson DeWolf Fo a slende ba subjeced o aial loading: 0 The elongaion in he -diecion is accompanied b a conacion in he ohe diecions. Assuming ha he maeial
Fouh diion MCHANICS OF MATRIALS Poisson s Raio Bee Johnson DeWolf Fo a slende ba subjeced o aial loading: 0 The elongaion in he -diecion is accompanied b a conacion in he ohe diecions. Assuming ha he maeial
7 Wave Equation in Higher Dimensions
 7 Wave Equaion in Highe Dimensions We now conside he iniial-value poblem fo he wave equaion in n dimensions, u c u x R n u(x, φ(x u (x, ψ(x whee u n i u x i x i. (7. 7. Mehod of Spheical Means Ref: Evans,
7 Wave Equaion in Highe Dimensions We now conside he iniial-value poblem fo he wave equaion in n dimensions, u c u x R n u(x, φ(x u (x, ψ(x whee u n i u x i x i. (7. 7. Mehod of Spheical Means Ref: Evans,
STUDY OF THE STRESS-STRENGTH RELIABILITY AMONG THE PARAMETERS OF GENERALIZED INVERSE WEIBULL DISTRIBUTION
 Inenaional Jounal of Science, Technology & Managemen Volume No 04, Special Issue No. 0, Mach 205 ISSN (online): 2394-537 STUDY OF THE STRESS-STRENGTH RELIABILITY AMONG THE PARAMETERS OF GENERALIZED INVERSE
Inenaional Jounal of Science, Technology & Managemen Volume No 04, Special Issue No. 0, Mach 205 ISSN (online): 2394-537 STUDY OF THE STRESS-STRENGTH RELIABILITY AMONG THE PARAMETERS OF GENERALIZED INVERSE
Monochromatic Wave over One and Two Bars
 Applied Mahemaical Sciences, Vol. 8, 204, no. 6, 307-3025 HIKARI Ld, www.m-hikai.com hp://dx.doi.og/0.2988/ams.204.44245 Monochomaic Wave ove One and Two Bas L.H. Wiyano Faculy of Mahemaics and Naual Sciences,
Applied Mahemaical Sciences, Vol. 8, 204, no. 6, 307-3025 HIKARI Ld, www.m-hikai.com hp://dx.doi.og/0.2988/ams.204.44245 Monochomaic Wave ove One and Two Bas L.H. Wiyano Faculy of Mahemaics and Naual Sciences,
Physics 2001/2051 Moments of Inertia Experiment 1
 Physics 001/051 Momens o Ineia Expeimen 1 Pelab 1 Read he ollowing backgound/seup and ensue you ae amilia wih he heoy equied o he expeimen. Please also ill in he missing equaions 5, 7 and 9. Backgound/Seup
Physics 001/051 Momens o Ineia Expeimen 1 Pelab 1 Read he ollowing backgound/seup and ensue you ae amilia wih he heoy equied o he expeimen. Please also ill in he missing equaions 5, 7 and 9. Backgound/Seup
Physics 180A Fall 2008 Test points. Provide the best answer to the following questions and problems. Watch your sig figs.
 Physics 180A Fall 2008 Tes 1-120 poins Name Provide he bes answer o he following quesions and problems. Wach your sig figs. 1) The number of meaningful digis in a number is called he number of. When numbers
Physics 180A Fall 2008 Tes 1-120 poins Name Provide he bes answer o he following quesions and problems. Wach your sig figs. 1) The number of meaningful digis in a number is called he number of. When numbers
Risk tolerance and optimal portfolio choice
 Risk oleance and opimal pofolio choice Maek Musiela BNP Paibas London Copoae and Invesmen Join wok wih T. Zaiphopoulou (UT usin) Invesmens and fowad uiliies Pepin 6 Backwad and fowad dynamic uiliies and
Risk oleance and opimal pofolio choice Maek Musiela BNP Paibas London Copoae and Invesmen Join wok wih T. Zaiphopoulou (UT usin) Invesmens and fowad uiliies Pepin 6 Backwad and fowad dynamic uiliies and
Online Completion of Ill-conditioned Low-Rank Matrices
 Online Compleion of Ill-condiioned Low-Rank Maices Ryan Kennedy and Camillo J. Taylo Compue and Infomaion Science Univesiy of Pennsylvania Philadelphia, PA, USA keny, cjaylo}@cis.upenn.edu Laua Balzano
Online Compleion of Ill-condiioned Low-Rank Maices Ryan Kennedy and Camillo J. Taylo Compue and Infomaion Science Univesiy of Pennsylvania Philadelphia, PA, USA keny, cjaylo}@cis.upenn.edu Laua Balzano
The shortest path between two truths in the real domain passes through the complex domain. J. Hadamard
 Complex Analysis R.G. Halbud R.Halbud@ucl.ac.uk Depamen of Mahemaics Univesiy College London 202 The shoes pah beween wo uhs in he eal domain passes hough he complex domain. J. Hadamad Chape The fis fundamenal
Complex Analysis R.G. Halbud R.Halbud@ucl.ac.uk Depamen of Mahemaics Univesiy College London 202 The shoes pah beween wo uhs in he eal domain passes hough he complex domain. J. Hadamad Chape The fis fundamenal
Transformations in Homogeneous Coordinates
 Tansfomations in Homogeneous Coodinates (Com S 4/ Notes) Yan-Bin Jia Aug 4 Complete Section Homogeneous Tansfomations A pojective tansfomation of the pojective plane is a mapping L : P P defined as u a
Tansfomations in Homogeneous Coodinates (Com S 4/ Notes) Yan-Bin Jia Aug 4 Complete Section Homogeneous Tansfomations A pojective tansfomation of the pojective plane is a mapping L : P P defined as u a
Week 1 Lecture 2 Problems 2, 5. What if something oscillates with no obvious spring? What is ω? (problem set problem)
") Week 1 Lecure Problems, 5 Wha if somehing oscillaes wih no obvious spring? Wha is ω? (problem se problem) Sar wih Try and ge o SHM form E. Full beer can in lake, oscillaing F = m & = ge rearrange: F =
Week 1 Lecure Problems, 5 Wha if somehing oscillaes wih no obvious spring? Wha is ω? (problem se problem) Sar wih Try and ge o SHM form E. Full beer can in lake, oscillaing F = m & = ge rearrange: F =
Let us start with a two dimensional case. We consider a vector ( x,
 Roaion marices We consider now roaion marices in wo and hree dimensions. We sar wih wo dimensions since wo dimensions are easier han hree o undersand, and one dimension is a lile oo simple. However, our
Roaion marices We consider now roaion marices in wo and hree dimensions. We sar wih wo dimensions since wo dimensions are easier han hree o undersand, and one dimension is a lile oo simple. However, our
Chapter 3 Kinematics in Two Dimensions
 Chaper 3 KINEMATICS IN TWO DIMENSIONS PREVIEW Two-dimensional moion includes objecs which are moing in wo direcions a he same ime, such as a projecile, which has boh horizonal and erical moion. These wo
Chaper 3 KINEMATICS IN TWO DIMENSIONS PREVIEW Two-dimensional moion includes objecs which are moing in wo direcions a he same ime, such as a projecile, which has boh horizonal and erical moion. These wo
AST1100 Lecture Notes
 AST00 Lecue Noes 5 6: Geneal Relaiviy Basic pinciples Schwazschild geomey The geneal heoy of elaiviy may be summaized in one equaion, he Einsein equaion G µν 8πT µν, whee G µν is he Einsein enso and T
AST00 Lecue Noes 5 6: Geneal Relaiviy Basic pinciples Schwazschild geomey The geneal heoy of elaiviy may be summaized in one equaion, he Einsein equaion G µν 8πT µν, whee G µν is he Einsein enso and T
Probabilistic Models. CS 188: Artificial Intelligence Fall Independence. Example: Independence. Example: Independence? Conditional Independence
 C 188: Aificial Inelligence Fall 2007 obabilisic Models A pobabilisic model is a join disibuion ove a se of vaiables Lecue 15: Bayes Nes 10/18/2007 Given a join disibuion, we can eason abou unobseved vaiables
C 188: Aificial Inelligence Fall 2007 obabilisic Models A pobabilisic model is a join disibuion ove a se of vaiables Lecue 15: Bayes Nes 10/18/2007 Given a join disibuion, we can eason abou unobseved vaiables
Authors name Giuliano Bettini* Alberto Bicci** Title Equivalent waveguide representation for Dirac plane waves
 Auhos name Giuliano Beini* Albeo Bicci** Tile Equivalen waveguide epesenaion fo Diac plane waves Absac Ideas abou he elecon as a so of a bound elecomagneic wave and/o he elecon as elecomagneic field apped
Auhos name Giuliano Beini* Albeo Bicci** Tile Equivalen waveguide epesenaion fo Diac plane waves Absac Ideas abou he elecon as a so of a bound elecomagneic wave and/o he elecon as elecomagneic field apped
KINEMATICS IN ONE DIMENSION
 KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
MATHEMATICS PAPER 121/2 K.C.S.E QUESTIONS SECTION 1 ( 52 MARKS) 3. Simplify as far as possible, leaving your answer in the form of surd
 3. Simplify as far as possible, leaving your answer in the form of surd") f MATHEMATICS PAPER 2/2 K.C.S.E. 998 QUESTIONS CTION ( 52 MARKS) Answe he enie queion in his cion /5. U logaihms o evaluae 55.9 (262.77) e F 2. Simplify he epeson - 2 + 3 Hence solve he equaion - - 2 +
f MATHEMATICS PAPER 2/2 K.C.S.E. 998 QUESTIONS CTION ( 52 MARKS) Answe he enie queion in his cion /5. U logaihms o evaluae 55.9 (262.77) e F 2. Simplify he epeson - 2 + 3 Hence solve he equaion - - 2 +
Physics 201, Lecture 5
 Phsics 1 Lecue 5 Tod s Topics n Moion in D (Chp 4.1-4.3): n D Kinemicl Quniies (sec. 4.1) n D Kinemics wih Consn Acceleion (sec. 4.) n D Pojecile (Sec 4.3) n Epeced fom Peiew: n Displcemen eloci cceleion
Phsics 1 Lecue 5 Tod s Topics n Moion in D (Chp 4.1-4.3): n D Kinemicl Quniies (sec. 4.1) n D Kinemics wih Consn Acceleion (sec. 4.) n D Pojecile (Sec 4.3) n Epeced fom Peiew: n Displcemen eloci cceleion
Chapter 7: Solving Trig Equations
 Haberman MTH Secion I: The Trigonomeric Funcions Chaper 7: Solving Trig Equaions Le s sar by solving a couple of equaions ha involve he sine funcion EXAMPLE a: Solve he equaion sin( ) The inverse funcions
Haberman MTH Secion I: The Trigonomeric Funcions Chaper 7: Solving Trig Equaions Le s sar by solving a couple of equaions ha involve he sine funcion EXAMPLE a: Solve he equaion sin( ) The inverse funcions
Lecture 2-1 Kinematics in One Dimension Displacement, Velocity and Acceleration Everything in the world is moving. Nothing stays still.
 Lecure - Kinemaics in One Dimension Displacemen, Velociy and Acceleraion Everyhing in he world is moving. Nohing says sill. Moion occurs a all scales of he universe, saring from he moion of elecrons in
Lecure - Kinemaics in One Dimension Displacemen, Velociy and Acceleraion Everyhing in he world is moving. Nohing says sill. Moion occurs a all scales of he universe, saring from he moion of elecrons in
Overview. Overview Page 1 of 8
 COMPUTERS AND STRUCTURES, INC., BERKELEY, CALIORNIA DECEMBER 2001 COMPOSITE BEAM DESIGN AISC-LRD93 Tecnical Noe Compac and Noncompac Requiemens Tis Tecnical Noe descibes o e pogam cecks e AISC-LRD93 specificaion
COMPUTERS AND STRUCTURES, INC., BERKELEY, CALIORNIA DECEMBER 2001 COMPOSITE BEAM DESIGN AISC-LRD93 Tecnical Noe Compac and Noncompac Requiemens Tis Tecnical Noe descibes o e pogam cecks e AISC-LRD93 specificaion
Two Coupled Oscillators / Normal Modes
 Lecure 3 Phys 3750 Two Coupled Oscillaors / Normal Modes Overview and Moivaion: Today we ake a small, bu significan, sep owards wave moion. We will no ye observe waves, bu his sep is imporan in is own
Lecure 3 Phys 3750 Two Coupled Oscillaors / Normal Modes Overview and Moivaion: Today we ake a small, bu significan, sep owards wave moion. We will no ye observe waves, bu his sep is imporan in is own
PDF Created with deskpdf PDF Writer - Trial ::
 A APPENDIX D TRIGONOMETRY Licensed to: jsamuels@bmcc.cun.edu PDF Ceated with deskpdf PDF Wite - Tial :: http://www.docudesk.com D T i g o n o m e t FIGURE a A n g l e s Angles can be measued in degees
A APPENDIX D TRIGONOMETRY Licensed to: jsamuels@bmcc.cun.edu PDF Ceated with deskpdf PDF Wite - Tial :: http://www.docudesk.com D T i g o n o m e t FIGURE a A n g l e s Angles can be measued in degees
Pseudosteady-State Flow Relations for a Radial System from Department of Petroleum Engineering Course Notes (1997)
") Pseudoseady-Sae Flow Relaions fo a Radial Sysem fom Deamen of Peoleum Engineeing Couse Noes (1997) (Deivaion of he Pseudoseady-Sae Flow Relaions fo a Radial Sysem) (Deivaion of he Pseudoseady-Sae Flow
Pseudoseady-Sae Flow Relaions fo a Radial Sysem fom Deamen of Peoleum Engineeing Couse Noes (1997) (Deivaion of he Pseudoseady-Sae Flow Relaions fo a Radial Sysem) (Deivaion of he Pseudoseady-Sae Flow
Fig. 1S. The antenna construction: (a) main geometrical parameters, (b) the wire support pillar and (c) the console link between wire and coaxial
 main geometrical parameters, (b) the wire support pillar and (c) the console link between wire and coaxial") a b c Fig. S. The anenna consucion: (a) ain geoeical paaees, (b) he wie suppo pilla and (c) he console link beween wie and coaial pobe. Fig. S. The anenna coss-secion in he y-z plane. Accoding o [], he
a b c Fig. S. The anenna consucion: (a) ain geoeical paaees, (b) he wie suppo pilla and (c) he console link beween wie and coaial pobe. Fig. S. The anenna coss-secion in he y-z plane. Accoding o [], he
On The Estimation of Two Missing Values in Randomized Complete Block Designs
 Mahemaical Theoy and Modeling ISSN 45804 (Pape ISSN 505 (Online Vol.6, No.7, 06 www.iise.og On The Esimaion of Two Missing Values in Randomized Complee Bloc Designs EFFANGA, EFFANGA OKON AND BASSE, E.
Mahemaical Theoy and Modeling ISSN 45804 (Pape ISSN 505 (Online Vol.6, No.7, 06 www.iise.og On The Esimaion of Two Missing Values in Randomized Complee Bloc Designs EFFANGA, EFFANGA OKON AND BASSE, E.
2. v = 3 4 c. 3. v = 4c. 5. v = 2 3 c. 6. v = 9. v = 4 3 c
 Vesion 074 Exam Final Daf swinney (55185) 1 This pin-ou should have 30 quesions. Muliple-choice quesions may coninue on he nex column o page find all choices befoe answeing. 001 10.0 poins AballofmassM
Vesion 074 Exam Final Daf swinney (55185) 1 This pin-ou should have 30 quesions. Muliple-choice quesions may coninue on he nex column o page find all choices befoe answeing. 001 10.0 poins AballofmassM
Non-uniform circular motion *
 OpenSax-CNX module: m14020 1 Non-uniform circular moion * Sunil Kumar Singh This work is produced by OpenSax-CNX and licensed under he Creaive Commons Aribuion License 2.0 Wha do we mean by non-uniform
OpenSax-CNX module: m14020 1 Non-uniform circular moion * Sunil Kumar Singh This work is produced by OpenSax-CNX and licensed under he Creaive Commons Aribuion License 2.0 Wha do we mean by non-uniform
Control Volume Derivation
 School of eospace Engineeing Conol Volume -1 Copyigh 1 by Jey M. Seizman. ll ighs esee. Conol Volume Deiaion How o cone ou elaionships fo a close sysem (conol mass) o an open sysem (conol olume) Fo mass
School of eospace Engineeing Conol Volume -1 Copyigh 1 by Jey M. Seizman. ll ighs esee. Conol Volume Deiaion How o cone ou elaionships fo a close sysem (conol mass) o an open sysem (conol olume) Fo mass
This is an example to show you how SMath can calculate the movement of kinematic mechanisms.
 Dec :5:6 - Kinemaics model of Simple Arm.sm This file is provided for educaional purposes as guidance for he use of he sofware ool. I is no guaraeed o be free from errors or ommissions. The mehods and
Dec :5:6 - Kinemaics model of Simple Arm.sm This file is provided for educaional purposes as guidance for he use of he sofware ool. I is no guaraeed o be free from errors or ommissions. The mehods and
The fundamental mass balance equation is ( 1 ) where: I = inputs P = production O = outputs L = losses A = accumulation
 where: I = inputs P = production O = outputs L = losses A = accumulation") Hea (iffusion) Equaion erivaion of iffusion Equaion The fundamenal mass balance equaion is I P O L A ( 1 ) where: I inpus P producion O oupus L losses A accumulaion Assume ha no chemical is produced or
Hea (iffusion) Equaion erivaion of iffusion Equaion The fundamenal mass balance equaion is I P O L A ( 1 ) where: I inpus P producion O oupus L losses A accumulaion Assume ha no chemical is produced or
Elements of Computer Graphics
 CS580: Compuer Graphics Min H. Kim KAIST School of Compuing Elemens of Compuer Graphics Geomery Maerial model Ligh Rendering Virual phoography 2 Foundaions of Compuer Graphics A PINHOLE CAMERA IN 3D 3
CS580: Compuer Graphics Min H. Kim KAIST School of Compuing Elemens of Compuer Graphics Geomery Maerial model Ligh Rendering Virual phoography 2 Foundaions of Compuer Graphics A PINHOLE CAMERA IN 3D 3
10.1 EXERCISES. y 2 t 2. y 1 t y t 3. y e
 66 CHAPTER PARAMETRIC EQUATINS AND PLAR CRDINATES SLUTIN We use a graphing device o produce he graphs for he cases a,,.5,.,,.5,, and shown in Figure 7. Noice ha all of hese curves (ecep he case a ) have
66 CHAPTER PARAMETRIC EQUATINS AND PLAR CRDINATES SLUTIN We use a graphing device o produce he graphs for he cases a,,.5,.,,.5,, and shown in Figure 7. Noice ha all of hese curves (ecep he case a ) have
Pressure Vessels Thin and Thick-Walled Stress Analysis
 Pessue Vessels Thin and Thick-Walled Sess Analysis y James Doane, PhD, PE Conens 1.0 Couse Oveview... 3.0 Thin-Walled Pessue Vessels... 3.1 Inoducion... 3. Sesses in Cylindical Conaines... 4..1 Hoop Sess...
Pessue Vessels Thin and Thick-Walled Sess Analysis y James Doane, PhD, PE Conens 1.0 Couse Oveview... 3.0 Thin-Walled Pessue Vessels... 3.1 Inoducion... 3. Sesses in Cylindical Conaines... 4..1 Hoop Sess...
EN221 - Fall HW # 7 Solutions
 EN221 - Fall2008 - HW # 7 Soluions Pof. Vivek Shenoy 1.) Show ha he fomulae φ v ( φ + φ L)v (1) u v ( u + u L)v (2) can be pu ino he alenaive foms φ φ v v + φv na (3) u u v v + u(v n)a (4) (a) Using v
EN221 - Fall2008 - HW # 7 Soluions Pof. Vivek Shenoy 1.) Show ha he fomulae φ v ( φ + φ L)v (1) u v ( u + u L)v (2) can be pu ino he alenaive foms φ φ v v + φv na (3) u u v v + u(v n)a (4) (a) Using v
5-1. We apply Newton s second law (specifically, Eq. 5-2). F = ma = ma sin 20.0 = 1.0 kg 2.00 m/s sin 20.0 = 0.684N. ( ) ( )
. F = ma = ma sin 20.0 = 1.0 kg 2.00 m/s sin 20.0 = 0.684N. ( ) ( )") 5-1. We apply Newon s second law (specfcally, Eq. 5-). (a) We fnd he componen of he foce s ( ) ( ) F = ma = ma cos 0.0 = 1.00kg.00m/s cos 0.0 = 1.88N. (b) The y componen of he foce s ( ) ( ) F = ma = ma
5-1. We apply Newon s second law (specfcally, Eq. 5-). (a) We fnd he componen of he foce s ( ) ( ) F = ma = ma cos 0.0 = 1.00kg.00m/s cos 0.0 = 1.88N. (b) The y componen of he foce s ( ) ( ) F = ma = ma
1 Solutions to selected problems
 1 Soluions o seleced problems 1. Le A B R n. Show ha in A in B bu in general bd A bd B. Soluion. Le x in A. Then here is ɛ > 0 such ha B ɛ (x) A B. This shows x in B. If A = [0, 1] and B = [0, 2], hen
1 Soluions o seleced problems 1. Le A B R n. Show ha in A in B bu in general bd A bd B. Soluion. Le x in A. Then here is ɛ > 0 such ha B ɛ (x) A B. This shows x in B. If A = [0, 1] and B = [0, 2], hen
t is a basis for the solution space to this system, then the matrix having these solutions as columns, t x 1 t, x 2 t,... x n t x 2 t...
 Mah 228- Fri Mar 24 5.6 Marix exponenials and linear sysems: The analogy beween firs order sysems of linear differenial equaions (Chaper 5) and scalar linear differenial equaions (Chaper ) is much sronger
Mah 228- Fri Mar 24 5.6 Marix exponenials and linear sysems: The analogy beween firs order sysems of linear differenial equaions (Chaper 5) and scalar linear differenial equaions (Chaper ) is much sronger
Exponential and Logarithmic Equations and Properties of Logarithms. Properties. Properties. log. Exponential. Logarithmic.
 Eponenial and Logaihmic Equaions and Popeies of Logaihms Popeies Eponenial a a s = a +s a /a s = a -s (a ) s = a s a b = (ab) Logaihmic log s = log + logs log/s = log - logs log s = s log log a b = loga
Eponenial and Logaihmic Equaions and Popeies of Logaihms Popeies Eponenial a a s = a +s a /a s = a -s (a ) s = a s a b = (ab) Logaihmic log s = log + logs log/s = log - logs log s = s log log a b = loga
Science Advertisement Intergovernmental Panel on Climate Change: The Physical Science Basis 2/3/2007 Physics 253
 Science Adeisemen Inegoenmenl Pnel on Clime Chnge: The Phsicl Science Bsis hp://www.ipcc.ch/spmfeb7.pdf /3/7 Phsics 53 hp://www.fonews.com/pojecs/pdf/spmfeb7.pdf /3/7 Phsics 53 3 Sus: Uni, Chpe 3 Vecos
Science Adeisemen Inegoenmenl Pnel on Clime Chnge: The Phsicl Science Bsis hp://www.ipcc.ch/spmfeb7.pdf /3/7 Phsics 53 hp://www.fonews.com/pojecs/pdf/spmfeb7.pdf /3/7 Phsics 53 3 Sus: Uni, Chpe 3 Vecos
s in boxe wers ans Put
 Pu answers in boxes Main Ideas in Class Toda Inroducion o Falling Appl Old Equaions Graphing Free Fall Sole Free Fall Problems Pracice:.45,.47,.53,.59,.61,.63,.69, Muliple Choice.1 Freel Falling Objecs
Pu answers in boxes Main Ideas in Class Toda Inroducion o Falling Appl Old Equaions Graphing Free Fall Sole Free Fall Problems Pracice:.45,.47,.53,.59,.61,.63,.69, Muliple Choice.1 Freel Falling Objecs
Reinforcement learning
 CS 75 Mchine Lening Lecue b einfocemen lening Milos Huskech milos@cs.pi.edu 539 Senno Sque einfocemen lening We wn o len conol policy: : X A We see emples of bu oupus e no given Insed of we ge feedbck
CS 75 Mchine Lening Lecue b einfocemen lening Milos Huskech milos@cs.pi.edu 539 Senno Sque einfocemen lening We wn o len conol policy: : X A We see emples of bu oupus e no given Insed of we ge feedbck
ME 141. Engineering Mechanics
 ME 141 Engineeing Mechnics Lecue 13: Kinemics of igid bodies hmd Shhedi Shkil Lecue, ep. of Mechnicl Engg, UET E-mil: sshkil@me.bue.c.bd, shkil6791@gmil.com Websie: eche.bue.c.bd/sshkil Couesy: Veco Mechnics
ME 141 Engineeing Mechnics Lecue 13: Kinemics of igid bodies hmd Shhedi Shkil Lecue, ep. of Mechnicl Engg, UET E-mil: sshkil@me.bue.c.bd, shkil6791@gmil.com Websie: eche.bue.c.bd/sshkil Couesy: Veco Mechnics
COORDINATE TRANSFORMATIONS - THE JACOBIAN DETERMINANT
 COORDINATE TRANSFORMATIONS - THE JACOBIAN DETERMINANT Link to: phsicspages home page. To leave a comment o epot an eo, please use the auilia blog. Refeence: d Inveno, Ra, Intoducing Einstein s Relativit
COORDINATE TRANSFORMATIONS - THE JACOBIAN DETERMINANT Link to: phsicspages home page. To leave a comment o epot an eo, please use the auilia blog. Refeence: d Inveno, Ra, Intoducing Einstein s Relativit
An Open cycle and Closed cycle Gas Turbine Engines. Methods to improve the performance of simple gas turbine plants
 An Open cycle and losed cycle Gas ubine Engines Mehods o impove he pefomance of simple gas ubine plans I egeneaive Gas ubine ycle: he empeaue of he exhaus gases in a simple gas ubine is highe han he empeaue
An Open cycle and losed cycle Gas ubine Engines Mehods o impove he pefomance of simple gas ubine plans I egeneaive Gas ubine ycle: he empeaue of he exhaus gases in a simple gas ubine is highe han he empeaue
KEY. Math 334 Midterm I Fall 2008 sections 001 and 003 Instructor: Scott Glasgow
 1 KEY Mah 4 Miderm I Fall 8 secions 1 and Insrucor: Sco Glasgow Please do NOT wrie on his eam. No credi will be given for such work. Raher wrie in a blue book, or on our own paper, preferabl engineering
1 KEY Mah 4 Miderm I Fall 8 secions 1 and Insrucor: Sco Glasgow Please do NOT wrie on his eam. No credi will be given for such work. Raher wrie in a blue book, or on our own paper, preferabl engineering
(n 1)n(n + 1)(n + 2) + 1 = (n 1)(n + 2)n(n + 1) + 1 = ( (n 2 + n 1) 1 )( (n 2 + n 1) + 1 ) + 1 = (n 2 + n 1) 2.
n(n + 1)(n + 2) + 1 = (n 1)(n + 2)n(n + 1) + 1 = ( (n 2 + n 1) 1 )( (n 2 + n 1) + 1 ) + 1 = (n 2 + n 1) 2.") Paabola Volume 5, Issue (017) Solutions 151 1540 Q151 Take any fou consecutive whole numbes, multiply them togethe and add 1. Make a conjectue and pove it! The esulting numbe can, fo instance, be expessed
Paabola Volume 5, Issue (017) Solutions 151 1540 Q151 Take any fou consecutive whole numbes, multiply them togethe and add 1. Make a conjectue and pove it! The esulting numbe can, fo instance, be expessed
() t. () t r () t or v. ( t) () () ( ) = ( ) or ( ) () () () t or dv () () Section 10.4 Motion in Space: Velocity and Acceleration
 t. () t r () t or v. ( t) () () ( ) = ( ) or ( ) () () () t or dv () () Section 10.4 Motion in Space: Velocity and Acceleration") Secion 1.4 Moion in Spce: Velociy nd Acceleion We e going o dive lile deepe ino somehing we ve ledy inoduced, nmely () nd (). Discuss wih you neighbo he elionships beween posiion, velociy nd cceleion you
Secion 1.4 Moion in Spce: Velociy nd Acceleion We e going o dive lile deepe ino somehing we ve ledy inoduced, nmely () nd (). Discuss wih you neighbo he elionships beween posiion, velociy nd cceleion you
ME 3560 Fluid Mechanics
 ME3560 Flid Mechanics Fall 08 ME 3560 Flid Mechanics Analsis of Flid Flo Analsis of Flid Flo ME3560 Flid Mechanics Fall 08 6. Flid Elemen Kinemaics In geneal a flid paicle can ndego anslaion, linea defomaion
ME3560 Flid Mechanics Fall 08 ME 3560 Flid Mechanics Analsis of Flid Flo Analsis of Flid Flo ME3560 Flid Mechanics Fall 08 6. Flid Elemen Kinemaics In geneal a flid paicle can ndego anslaion, linea defomaion
Math Wednesday March 3, , 4.3: First order systems of Differential Equations Why you should expect existence and uniqueness for the IVP
 Mah 2280 Wednesda March 3, 200 4., 4.3: Firs order ssems of Differenial Equaions Wh ou should epec eisence and uniqueness for he IVP Eample: Consider he iniial value problem relaed o page 4 of his eserda
Mah 2280 Wednesda March 3, 200 4., 4.3: Firs order ssems of Differenial Equaions Wh ou should epec eisence and uniqueness for he IVP Eample: Consider he iniial value problem relaed o page 4 of his eserda
The Global Trade and Environment Model: GTEM
 The Global Tade and Envionmen Model: A pojecion of non-seady sae daa using Ineempoal GTEM Hom Pan, Vivek Tulpulé and Bian S. Fishe Ausalian Bueau of Agiculual and Resouce Economics OBJECTIVES Deive an
The Global Tade and Envionmen Model: A pojecion of non-seady sae daa using Ineempoal GTEM Hom Pan, Vivek Tulpulé and Bian S. Fishe Ausalian Bueau of Agiculual and Resouce Economics OBJECTIVES Deive an
Kalman Filter: an instance of Bayes Filter. Kalman Filter: an instance of Bayes Filter. Kalman Filter. Linear dynamics with Gaussian noise
 COM47 Inoducion o Roboics and Inelligen ysems he alman File alman File: an insance of Bayes File alman File: an insance of Bayes File Linea dynamics wih Gaussian noise alman File Linea dynamics wih Gaussian
COM47 Inoducion o Roboics and Inelligen ysems he alman File alman File: an insance of Bayes File alman File: an insance of Bayes File Linea dynamics wih Gaussian noise alman File Linea dynamics wih Gaussian
Main Ideas in Class Today
 Main Ideas in Class Toda Inroducion o Falling Appl Consan a Equaions Graphing Free Fall Sole Free Fall Problems Pracice:.45,.47,.53,.59,.61,.63,.69, Muliple Choice.1 Freel Falling Objecs Refers o objecs
Main Ideas in Class Toda Inroducion o Falling Appl Consan a Equaions Graphing Free Fall Sole Free Fall Problems Pracice:.45,.47,.53,.59,.61,.63,.69, Muliple Choice.1 Freel Falling Objecs Refers o objecs
336 ERIDANI kfk Lp = sup jf(y) ; f () jj j p p whee he supemum is aken ove all open balls = (a ) inr n, jj is he Lebesgue measue of in R n, () =(), f
 ; f () jj j p p whee he supemum is aken ove all open balls = (a ) inr n, jj is he Lebesgue measue of in R n, () =(), f") TAMKANG JOURNAL OF MATHEMATIS Volume 33, Numbe 4, Wine 2002 ON THE OUNDEDNESS OF A GENERALIED FRATIONAL INTEGRAL ON GENERALIED MORREY SPAES ERIDANI Absac. In his pape we exend Nakai's esul on he boundedness
TAMKANG JOURNAL OF MATHEMATIS Volume 33, Numbe 4, Wine 2002 ON THE OUNDEDNESS OF A GENERALIED FRATIONAL INTEGRAL ON GENERALIED MORREY SPAES ERIDANI Absac. In his pape we exend Nakai's esul on he boundedness
Some Basic Information about M-S-D Systems
 Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Rigid Body Dynamics 2. CSE169: Computer Animation Instructor: Steve Rotenberg UCSD, Winter 2018
 Rigid Body Dynamics 2 CSE169: Compute Animation nstucto: Steve Rotenbeg UCSD, Winte 2018 Coss Poduct & Hat Opeato Deivative of a Rotating Vecto Let s say that vecto is otating aound the oigin, maintaining
Rigid Body Dynamics 2 CSE169: Compute Animation nstucto: Steve Rotenbeg UCSD, Winte 2018 Coss Poduct & Hat Opeato Deivative of a Rotating Vecto Let s say that vecto is otating aound the oigin, maintaining
Suggested Practice Problems (set #2) for the Physics Placement Test
 for the Physics Placement Test") Deparmen of Physics College of Ars and Sciences American Universiy of Sharjah (AUS) Fall 014 Suggesed Pracice Problems (se #) for he Physics Placemen Tes This documen conains 5 suggesed problems ha are
Deparmen of Physics College of Ars and Sciences American Universiy of Sharjah (AUS) Fall 014 Suggesed Pracice Problems (se #) for he Physics Placemen Tes This documen conains 5 suggesed problems ha are
y z P 3 P T P1 P 2. Werner Purgathofer. b a
 Einführung in Viual Compuing Einführung in Viual Compuing 86.822 in co T P 3 P co in T P P 2 co in Geomeric Tranformaion Geomeric Tranformaion W P h f Werner Purgahofer b a Tranformaion in he Rendering
Einführung in Viual Compuing Einführung in Viual Compuing 86.822 in co T P 3 P co in T P P 2 co in Geomeric Tranformaion Geomeric Tranformaion W P h f Werner Purgahofer b a Tranformaion in he Rendering
Lecture Notes 2. The Hilbert Space Approach to Time Series
 Time Series Seven N. Durlauf Universiy of Wisconsin. Basic ideas Lecure Noes. The Hilber Space Approach o Time Series The Hilber space framework provides a very powerful language for discussing he relaionship
Time Series Seven N. Durlauf Universiy of Wisconsin. Basic ideas Lecure Noes. The Hilber Space Approach o Time Series The Hilber space framework provides a very powerful language for discussing he relaionship
15. Bicycle Wheel. Graph of height y (cm) above the axle against time t (s) over a 6-second interval. 15 bike wheel
 above the axle against time t (s) over a 6-second interval. 15 bike wheel") 15. Biccle Wheel The graph We moun a biccle wheel so ha i is free o roae in a verical plane. In fac, wha works easil is o pu an exension on one of he axles, and ge a suden o sand on one side and hold he
15. Biccle Wheel The graph We moun a biccle wheel so ha i is free o roae in a verical plane. In fac, wha works easil is o pu an exension on one of he axles, and ge a suden o sand on one side and hold he