Observing the Behaviour of High Stable Galileo Satellite Clocks and Exploring Potential Associated Benefits
|
|
|
- Ashlynn Tucker
- 5 years ago
- Views:
Transcription
1 Observing the Behaviour of High Stable Galileo Satellite Clocks and Exploring Potential Associated Benefits Navarro Madrid, P. F., Roldán Gómez, P. J., Calle Calle, J. D., Rodríguez Pérez, I., Cela López, C., M., Laínez Samper, M. D., Romay Merino, M. M., GMV BIOGRAPHIES Pedro F. Navarro Madrid holds a Master of Science in Mathematics from the University of Murcia (Spain) and Postgraduate studies in Theoretical Physics at the University of Valencia (Spain). He has worked at GMV since 2002 as an engineer in the development of Galileo and later in R&D activities covering both the ground and user segments. Pedro J. Roldán has a Master of Science in Aerospace Engineering from the Technical University of Madrid and in Meteorology and Geophysics from the Complutense University of Madrid. He has worked at GMV since 2013 in the development of GNSS algorithms, including precise point positioning and orbit determination within magicgnss and timing algorithms for the Galileo Time and Geodetic Validation Facility. J. David Calle has a Master of Science in Computer Engineering from the University of Salamanca. He joined GMV in 2008 and he is currently working in the GNSS business unit designing and developing GNSS algorithms, applications and systems. He has been involved in the development of the magicgnss suite and the Galileo Time and Geodetic Validation Facility. He is currently the technical responsible for the development of the Galileo Commercial Service Demonstrator. Irma Rodríguez is Head of the GNSS Algorithms, Products and Services Division at GMV Aerospace and Defence. She has an MSc in Telecommunication Engineering, from the Universidad Politécnica de Madrid, Spain. Irma has been working in GNSS for almost 15 years and she is currently responsible for a division in charge of, among others, R&D activities in the field of precise orbit determination and high accuracy positioning and integrity, the GMV s magicodts and magicppp services and different projects such as the Galileo CS Demonstrator, the Galileo Time and Geodetic Validation Facility, the G2G Navigation & Metrology Algorithms and the Galileo Reference Center. Camilo Cela López holds a Bachelor of Science in Physics and Mathematics from MIT. He started working at GMV in early 2017 as a GNSS engineer in R&D activities, mainly related to the magicgnss platform. María D. Laínez Samper is currently coordinating the GMV research activities in the field of Satellite Navigation, and in particular those related to precise positioning applications. She has also worked in experimentation and verification activities, in the Operational Systems Division, during the preliminary phases of the Galileo Program, and has been the responsible for the clock prediction and navigation message computation modules in the Galileo E-OSPF (Experimental Orbitography and Synchronization Processing Facility). Miguel M. Romay Merino is the GNSS Business Unit Director at GMV Aerospace and Defence. Miguel leads the GMV Unit that has become one of the strongest groups of GNSS experts thanks to its key involvement in GPS, EGNOS and Galileo. Miguel has been a pioneer in the Galileo Program, collaborating on aspects such as constellation design, precise orbit determination, integrity, performance evaluation, system definition, etc. Miguel is today involved in GMV research activities in the definition of novel GNSS applications and on the design of new generation GNSS.
2 ABSTRACT It is quite common to consider GNSS satellites as highly accurate clocks orbiting the Earth and it is with the aid of these orbiting clocks that GNSS users are able to obtain precise positioning solutions. As for any other satellite navigation system, Galileo s satellite clocks are one of the critical technologies in the system. In the particular case of Galileo, each satellite is equipped with four redundant clocks: two primary Passive Hydrogen Masers (PHM) measuring time to within 0.45 ns over 12 hours, which is four times better than the performance of the two secondary Rubidium clocks, accurate to within 1.8 ns over 12 hours, see [Ref. 1.]. Notwithstanding the reported and now identified Galileo satellite clock failures, see [Ref. 2.], the observed behaviour of the Galileo clocks, when operating nominally, seems to be very stable, especially in the short term. The clock stability feature is a key element: on the one hand for the accuracy of the navigation solutions and on the other hand for its non-negligible impact on the system complexity and associated costs. Clock stability, as well as the navigation solution accuracy, are directly related, together with other factors, to clock predictability. Higher stability implies more accurate predictability, and better predictions mean better ephemeris. Not only better standard ephemeris for navigation solutions, but also better long term ephemeris for assisted navigation. On top of that, better clock stability can also potentially contribute to reduce the complexity of the GNSS ground segment. Standard ODTS (Orbit Determination & Time Synchronisation) approaches implement snapshot strategies for the clock restitution, based on obtaining epoch by epoch estimates of all satellite s and station receiver s clock parameters. This approach implies the management of a large number of parameters in the estimation process, which could be drastically reduced if some information about the physical behaviour of the clocks in the system could be input to the processing filter, for example, if the snapshot estimation strategy could be replaced by a pure model or by a mixed model-snapshot strategy. This paper is aimed at observing the behaviour of the Galileo satellite apparent clocks, with the purpose of finding interesting features allowing potential improvements in at least the following aspects: accuracy of the navigation solutions, accuracy of long term ephemeris and ground segment complexity. The results included in this paper are based on the analysis of apparent clocks obtained through accurate restitution by means of ODTS processes, implementing state-of-the-art algorithms and models. Typical trends and anomalous events of the Galileo satellite clocks are going to be described and analysed. Comparisons with other GNSS satellite clocks are going to be shown, and conclusions, driven out of the performed research, are going to be extracted. INTRODUCTION The paper is structured into six main sections, describing the performed tasks and carried out analyses for observing the behaviour of the Galileo and other GNSS constellations satellites clocks: Apparent Clocks Clock Stability Analysis Clock Frequency Analysis Clock Prediction Analysis Covariance Analysis Clock Modelling Analysis The obtained results are going to be shown and assessed in order to determine potential benefits attainable from an optimum utilization of the observed clock data features. Section Apparent Clocks below, is aimed at describing what kind of data have been generated for feeding the clock analyses, how they have been generated, and what can be observed when the obtained clock time series are plotted. The subsequent section, Clock Stability Analysis, is aimed at showing the stability analyses corresponding to the generated time series. Relevant features of the obtained results will be discussed. In the following section, Clock Frequency Analysis, the considered satellite apparent clocks will be analysed in the frequency domain, in order to identify whether there are periodic effects in the different GNSS constellations clocks signals or not. Knowing and understanding the satellite clocks signals is helpful for defining smart clock estimation and prediction strategies. Clock prediction attainable performances are going to be addressed in the Clock Prediction Analysis section, and the last two main sections, Covariance Analysis and Clock
3 Modelling Analysis are intended to, respectively, assessing the impact of the satellite clock lack of knowledge on the global ODTS process uncertainty, and evaluating potential benefits which could be obtained in case pure or mixed clock models where incorporated to the ODTS process. Potential evolutions of the carried out activities, out of the scope of the present paper, will be suggested in the Further Work section, and finally the paper will be closed with the main conclusions driven from the performed research. APPARENT CLOCKS The carried out analyses are mainly based on the analysis of apparent clocks obtained through accurate restitution by means of ODTS processes, implementing state-of-the-art algorithms and models. The apparent clock signal is the addition of the physical clock signal plus a series of other effects, some of them introduced by the ODTS restitution process, which includes: on-board phase stability, receiver noise and orbital residuals, some others not related to the ODTS process, such as thermal effects, which have to be considered when analysing the apparent clock signal behaviour. The ODTS processes executed for the generation of the restituted clock time series were run with magicgnss, a state-of-theart ODTS web tool, able to compute multi-constellation GNSS products. See [Ref. 3.] to [Ref. 8.] for further information about magicgnss. These and other related publications can be found in the magicgnss website, see [Ref. 9.]. The analysed time period is 120 days long. It stars on DOY 040 in 2017 (corresponding to February 9 th ) and spans through DOY 160 in 2017 (corresponding to June 9 th ), about four months. Each ODTS process was configured to cover a partial period of 6 days, with an overlap of 1 day between consecutive executions. The first and last 12 hours of each process were cut off, for minimising the so called bathtub effect, i.e. the effect of the least squares based ODTS estimation process which results in a non-homogeneous distribution of the residual errors, which are typically larger in the extremes of the estimation period, and smaller in the middle. The resulting estimations were joined, and that is how the clock time series were generated. A summary of the ODTS processed configuration is provided next, showing further detailed information about the estimation process features: Table 1: magicgnss configuration summary Constellations GPS, GLONASS, Galileo, BeiDou Stations 56 world-wide distributed Estimation arc duration 6 days Data Sampling 300 s Minimum elevation angle 10 deg Number of iterations 6 The obtained clock time series were adjusted with a low order polynomial (order 2, parabolic fit) which was subtracted from the original time series in order to obtain a detrended clock solution, more suitable for a graphic representation. Without the detrending operation, the analogous plot would only be able to reflect the low order polynomial behaviour, not allowing the perception of other smaller-scale effects. In some cases, especially for BeiDou and Galileo, the obtained clock time series had discontinuities and gaps. However, the clock time series have not been split into different subsets for avoiding the mentioned discontinuities. Consequently, the associated generated detrended clock plots clearly reflect the mentioned discontinuities and gaps. The following figures show the plots of the obtained detrended time series. Please note that the X-axis represents the date in MJD(50) format, and the unit for the Y-axis values is the second.







4 Figure 1: GPS detrended clock time series - ~ 4 months







5 Figure 2: GLONASS detrended clock time series - ~ 4 months Figure 3: BeiDou detrended clock time series - ~ 4 months
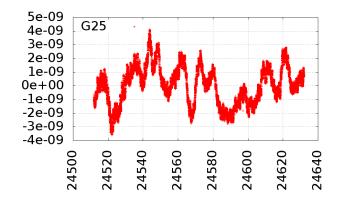
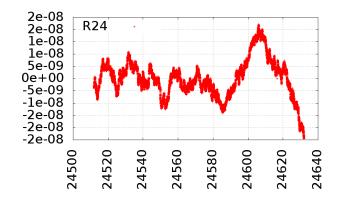
6 Figure 4: Galileo detrended clock time series - ~ 4 months It is interesting to observe the Y-axis of the previous plots, and see that it is rather large for satellite clocks presenting some kind of discontinuity. It is relatively frequent for BeiDou and Galileo satellites, and also for some GPS satellites. For example the Y-axis magnitude order for C06, C07, C08, C10, C12, E14, E18 and E24 is 1.0e-04 s, whereas it remains about 1.0e-08 s and 1.0e-09 s for almost all GPS and GLONASS satellites. GLONASS R23 does also present a significant discontinuity, and there are two GPS satellites plots showing detrended clocks with Y-axis magnitude orders about 1.0e-07 s: G03 and G11. Regarding GPS, some frequency changes can be observed for G06, G10, G11, G26, G27 and G30. G01 and G03 show clear frequency jumps in the analysed period. When observed in shorter time periods, the low order polynomial (typically a very smooth parabola, almost a straight line) usually and logically fits much better the clock data set, and the detrended satellite clock data spans in a usually smaller Y- range. The Y-range is related to the statistical dispersion of the clock behaviour, and has a strong dependence on the kind of active frequency standard on board each satellite. BeiDou satellites are equipped with rubidium (Rb) frequency standards. GLONASS satellites are equipped with caesium (Cs) frequency standards. Each Galileo satellite is equipped with four redundant clocks: two primary Passive Hydrogen Masers (PHM) and two secondary Rb clocks. For the analysed period, all active Galileo satellite clocks were PHM except for E11 and E22, which were Rb. And finally, all current GPS satellites are equipped with Rb clocks, except for G08, which is working with a Cs clock, see [Ref. 19.]. Regarding GPS, it has to be noticed that currently active satellites belong to two different blocks, IIR and IIF, equipped with different generation Rb technologies. The newest GPS satellites are those belonging to block IIF: G01, G03, G06, G08, G09, G10, G24, G25, G26, G27, G30 and G32. Four examples of detrended clock time series, for different satellites with different frequency standards on board are shown below. In the case of GPS, two Rb examples are shown, one for a satellite belonging to block IIR and another one for a satellite in the newest IIF block. Galileo E30 is equipped with a PHM, GPS G08 with a Cs, GPS G01 belonging to block IIF with a Rb and GPS G11 belonging to block IIR also with a Rb. Please note that the y-axis is expressed in seconds (1ns = 1e-09 s ~ 30 cm).
7 Figure 5: Detrended clock time series (s) 6 days The analysis of the behaviour of atomic clocks, in short and large time periods, is usually referred as frequency stability analysis. That topic is referred in the next section. CLOCK STABILITY ANALYSIS Current techniques for clock stability analysis are based on the use of specialized statistical variances which were developed on purpose in order to characterize clock noise as a function of different time periods, usually referred as averaging times. Usual statistical parameters, such as standard deviation, were found to be inadequate for clock stability analysis. The standard deviation of a clock data population (set of samples), depends on the number of samples used to determine it. Specific statistical variances, such as the Allan Variance, based on using differences of the fractional frequency values (second differences of the phase), started being defined back in the 60 s. These variances, which are not affected by the number of samples of the population, were found to be suitable for the intended purposes, and their introduction set the basis for the current clock stability analyses. Further information about clock stability analysis can be found in [Ref. 10.]. Some basic stability analyses were performed with the GNSS satellite clock time series. In principle, several of the generated sets should have been partitioned, in particular those showing discontinuities, in order to obtain the stochastic characteristics for each one of the considered satellite clocks, which should be constant, both stationary over time and ergodic over the population, for each one of the considered satellite clocks. However we have not split the data sets, and in the cases with discontinuities in the data sets, the obtained stability values are not intended to represent the stochastic characteristics of the considered satellite clocks. They are intended to further illustrate the fact that those discontinuities exist. The obtained results are shown in Figure 7. For better understanding the clock stability results obtained for the different GNSS constellations satellites, we include Figure 6 below, with stability specifications for the different considered atomic frequency standards: Cs, Rb (RAFS, Rubidium Atomic Frequency Standard) and PHM. Lower Allan Deviation values correspond to higher stability specifications. Figure 6: Atomic frequency standards specifications
8 BEIDOU GALILEO GPS IIR GPS IIF GPS (All) GLONASS Figure 7: Clock stability analysis Allan deviation
9 The clock stability results depicted in Figure 7 above, can be summarised as follows: Beidou: Galileo: Large discontinuities can be observed for satellites C06, C07, C10 and C12. They are related to phase jumps, as shown in Figure 3. A degradation of the satellite C08 long-term stability can be observed. It is related to a frequency discontinuity, as shown in Figure 3. Standard ADEV curves are obtained for satellites C09 and C14, the ones showing the smallest Y-axis range in Figure 3. Abnormally large ADEV values are obtained for satellites E24, E14, E18 and E26. E24 and E26 present large phase discontinuities, whereas E14 and E18 (which are indeed not operational, they were launched into incorrect orbits and later on moved into more usable orbits, see [Ref. 24.]), present frequency discontinuities. See Figure 4. For the rest of the satellites, ADEV for the lower averaging times is in line with the specifications, but for higher averaging times, ADEV values are disperse. Quite large values for higher averaging times ADEV values can be observed with respect to the specifications (E11 and E22 have active RAFS on-boards, all the others have PHM frequency standards) for all of them except for satellites E12, E19 and E30. The reasons for the observed large stability values, especially for the long-term are discontinuities and oscillations already observed in the apparent clocks section. The obtained values are coherent with the Y-axis scale range in Figure 4. GPS: No large discontinuities can be observed for any of the considered satellites. Three clearly defined blocks can be observed. Satellite G08 is different from all the rest, since its active frequency standard is a Cs clock, and thus its stability is worse. The group of satellites with lower ADEV values for low averaging times (G01, G03, G06, G09, G10, G25, G26, G27, G30, G32) corresponds to the newest block IIF satellites, whereas all the rest belong to older blocks IIR and IIR-M. GLONASS: GLONASS satellites are all equipped with Cs frequency standards. Very similar stability behaviours have been obtained for all of them, except for satellite R23, coherently with Figure 2, in which a large phase jump can be observed for R23. ADEV values obtained for GLONASS satellites are slightly worse than for other constellations clocks, using RAFS and PHM frequency standards, for the lower averaging times, but they are quite similar for higher averaging times. When comparing the results for the different constellations, it can be observed that the best stability values for short averaging times have been obtained for the Galileo satellite clocks (those not affected by phase or frequency anomalies) and for the newest GPS block IIF satellite clocks. This means that, in principle, the best short time clock predictions should be obtained for these satellites. Regarding long time predictions, the difference between the different technologies seems to be smaller, and in this case, the attainable performances seems to be more related to events and discontinuities in the clock operations. CLOCK FREQUENCY ANALYSIS The objective of this section is to perform the analysis of apparent clocks in the frequency domain. As it is known (see for example [Ref. 25.] ), satellites experience periodic effects along time, which are naturally associated with the fact GNSS satellites follow a periodic orbit around the Earth, with revolution periods of 11h 58, 11h 15, and 14h 22 for GPS, Glonass, and Galileo, respectively. These effects are actually also reflected in the onboard clocks behavior, and these (and possibly other periodic effects) are the ones we are going to analyze in this paper. Two different techniques have been used for the frequency domain analysis: the Fast Fourier Transform (FFT) and the Karhunen-Loève Transform (KLT). The Fourier Transform (FT) is a typical tool for frequency domain analysis and the FFT is its most widely used implementation. The use of the KLT (see [Ref. 26.]) has been introduced in the analysis due to its applicability to more easily identify weak harmonic components.
10 Although a complete study of the results has been performed for GPS and Galileo, only a representative example of the KLT for each constellation is presented in Figure 8. These examples do only contained the high-frequency components (sub-daily) and the minimum cycle period is 2 hours, which is in fact the sampling rate. Figure 8: Examples of results of the clock frequency domain In the case of GPS, there is a clear periodic effect correlated with the orbital period, which could be partially due to thermal effects and to the correlation with the orbit estimation error. The half-period peak could also be related to the second order relativistic correction (associated to J2). In the case of Galileo, the magnitude of the correlation with the orbital period, observed at around 14 hours 22 minutes and submultiples, is not so significant; additionally, we can observe the effect of the correlation with the length of the orbit and clock estimation arc, which is normally multiple of 12 hours, as a periodic effect at this cycle period. The understanding and characterization of these periodic effects is relevant to improve for clock modelling techniques in ODTS processes as explained in subsequent section Clock Modeling Analysis. The frequency of the periodic effects is characteristic of each constellation, whereas the amplitude could be specific for each particular satellite. CLOCK PREDICTION ANALYSIS Because of the results obtained in the clock stability analysis section, we have decided to skip the BeiDou constellation satellites, since most of them have shown some kind of anomaly in the previous analyses. Galileo satellites have also shown events and discontinuities, especially affecting the long-term clock behaviour. That is why we have considered them all for the short-term clock prediction analyses, and have just kept the ones without anomalies for the long-term prediction tasks. The clock prediction analysis has consisted on processing the restituted clock time series in order to build estimation and prediction moving windows covering the whole time series. Fit intervals of 100 minutes, 200 minutes, 12 hours and 24 hours were considered for generating 100-minutes-long predictions (short-term predictions). Fit intervals of 1, 5, 7 and 15 days were considered for generating 100 minutes, 1, 7, 15 and 30 day-long predictions (medium and long term predictions). In all cases, the moving window delta was 1 day long, and both linear and quadratic fit modes were used. Statistical results for the RMS (Root Mean Square), 50% percentile, 68% percentile and 95% percentile have been computed. The clock prediction error presented for each one of the considered satellites has been the lower one obtained for the best fitting model out of the different considered fitting schemes (different fit intervals and regression models). The results have been plotted in Figure 9 below.
11 GPS GLONASS GALILEO 100-minutes Clock Prediction Error (m) 1-day Clock Prediction Error (m) 7-day Clock Prediction Error (m) 15-day Clock Prediction Error (m) 30-day Clock Prediction Error (m) Figure 9: Clock prediction analysis
12 For better interpreting the obtained clock prediction results, they have been summarised in Table 2 below, presenting numerical values for facilitating direct comparisons: Table 2: Clock prediction analysis - summary GPS & GLONASS GALILEO GPS & GLONASS GALILEO 100-minutes Clock Prediction Error (m) Average p50 GPS: 0.13 Average p50 GPS IIF Rb: 0.08 Average p50: 0.06 Average p50 GLONASS: 0.31 Average p68 GPS: 0.16 Average p68 GPS IIF Rb: 0.11 Average p68: 0.08 Average p68 GLONASS: 0.41 RMS (RMS GPS): 0.18 RMS (RMS GPS IIF Rb): 0.11 RMS * (RMS): 0.08 RMS (RMS GLONASS): day Clock Prediction Error (m) p50 E12: 0.44 Average p50 GPS: 1.13 p50 E19: 0.51 Average p50 GLONASS: 2.44 p50 E30: 0.37 Average p68 GPS: 2.18 Average p68 GLONASS: 3.97 RMS (RMS GPS): 3.92 RMS (RMS GLONASS): day Clock Prediction Error (m) Average p50 GPS: 4.20 Average p50 GLONASS: 6.37 Average p68 GPS: 7.20 Average p68 GLONASS: 9.76 RMS (RMS GPS): RMS (RMS GLONASS): p68 E12: 0.83 p68 E19: 0.95 p68 E30: 0.87 RMS E12: 1.10 RMS E19: 1.14 RMS E30: 2.31 p50 E12: 1.53 p50 E19: 1.43 p50 E30: 3.09 p68 E12: 2.29 p68 E19: 2.03 p68 E30: 5.38 RMS E12: 2.80 RMS E19: 2.47 RMS E30: day Clock Prediction Error (m) Average p50 GPS: 6.74 Average p50 GLONASS: Average p68 GPS: 9.64 Average p68 GLONASS: RMS (RMS GPS): RMS (RMS GLONASS): day Clock Prediction Error (m) Average p50 GPS: Average p50 GLONASS: Average p68 GPS: Average p68 GLONASS: RMS (RMS GPS): RMS (RMS GLONASS): p50 E12: 2.33 p50 E19: 2.12 p50 E30: 9.19 p68 E12: 3.67 p68 E19: 3.27 p68 E30: RMS E12: 4.39 RMS E19: 3.57 RMS E30: p50 E12: 3.59 p50 E19: 3.64 p50 E30: p68 E12: 5.90 p68 E19: 5.99 p68 E30: RMS E12: 8.32 RMS E19: 6.19 RMS E30: The obtained results show that Galileo satellite clock prediction errors are similar, and even better than those obtained for other GNSS constellations for relatively short time periods, in the range of the navigation message validity times. Obtained clock prediction errors for 100 minutes prediction intervals are in the cm level: 8 cm (RMS) for operational Galileo satellites, 11 cm (RMS) for block IIF GPS satellites, and 19 cm (RMS) for GLONASS (operating with Cs AFS). For longer time periods, undefined clock anomalies, probably related to operational and/or testing events, not inherent in the clock behaviour, cause the Galileo statistics to degrade. In absence of anomalies and events, the Galileo satellites clock prediction performances are again in the same magnitude order of the ones obtained for other GNSS constellations clocks. Attainable standard clock prediction errors for long prediction intervals would be: 1-day-long prediction interval: 2-5 m 7-day-long prediction interval: 5-10 m 15-day-long prediction interval: m 30-day-long prediction interval: m Note that as anticipated when performing the GLONASS stability analyses, GLONASS (Cs) clock predictions for short-time intervals are relatively high, whereas long-time predictions are comparable with those obtained for GPS RAFS.
13 COVARIANCE ANALYSIS The observed Galileo clocks short-term high stability opens the door to the implementation of clock models in the ODTS process, and thus, to the investigation of potential associated benefits that could be derived from the mentioned alternative implementation. The standard implementation is usually referred to as snapshot, and consists of estimating one clock parameter at each epoch, for each one of the satellite and station clocks, which is relatively costly from the computational point of view, and requires good geometrical observability conditions (at least four satellites in view from each station, and four stations in view from each satellite, at all epochs). Some preliminary covariance analyses were performed in order to assess the impact of the satellite clock lack of knowledge on the global ODTS process uncertainty. The covariance analyses have been carried out with a dedicated analysis tool developed by GMV for the detailed study of the ODTS processes, see [Ref. 14.]. Covariance analysis, though usually optimistic, can provide an analytic best case test of the improvement of performances that could be achieved under different circumstances. Figure 10 below contains the results of the covariance analysis performed on orbit determination accuracy. The reference scenario corresponds to a ground network of 17 world-wide homogeneously distributed stations shown and a Walker 27/3/1 Galileo constellation. Please note that even if the covariance tool has been calibrated for rendering significant quantitative results, the provided results are to be qualitative interpreted. Precise accuracy results are strongly dependent on the size, distribution and quality of the tracking stations network, and, for the sake of simplicity and clarity, we have not used those parameters as variables in our analyses. Please note that in Figure 10 below, the covariance estimation for the orbit error is projected into the radial (rad), along-track (at) and cross-track (ct) directions. Figure 10: Orbit Estimation Covariance (RMS, cm) The plot shows that the main benefit is obtained when the satellite snapshot clock estimation is avoided, even if clock estimation remains unknown. The ODTS process uncertainly is significantly reduced when satellite snapshot estimation is kept off, whereas the analogous effect for the stations clock modelling is not as significant. In addition, station clock predictions are not as relevant for navigation purposes as satellite clock prediction, in the sense that only satellite clocks are needed to be predicted for being distributed to navigation users through the navigation messages. Station clock predictions could however be relevant for other purposes. This means that there is a potential improvement for the ODTS processes, if satellite clocks could be modelled with a simple function (e.g. a quadratic polynomial). The results depicted in Figure 10 above for the No snapshot satellite clocks case, represent the theoretical covariance of the expected errors that would be obtained in case it was possible to exactly model the behaviour of all the GNSS systems satellite clocks, which is clearly not the case. In the real scenarios, even the most stable satellite clocks have certain stochastic components, and are affected by other effects, not able to be fit to a model. The final real clock estimation error will be larger or smaller depending on the satellite stability, the fit model, the fit interval length, the correlation with other parameters, etc. but in any case, larger than the theoretical one, since real satellite clocks do not behave as perfect simple models. CLOCK MODELING ANALYSIS Notwithstanding the observed short-term high stability of the Galileo PHMs, on-board clocks are not perfectly stable, and apparent clock signals are affected by additional effects, besides the strict frequency standard behaviour, such as explained before in section Apparent Clocks. Thus, for the clock modelling analyses with real data, we have considered a simple clock model, and a mixed simple clock model plus snapshot (perturbation around a quadratic function), to be compared with respect to the standard snapshot strategy.
![Second order relativistic effects have also been considered, see [Ref. 15.].](/docs-images/85/91910501/images/14-0.jpg "The used evolution of a simple quadratic function can be expressed as: where: is a quadratic function, is the second-order relativistic correction due to the gravitational")


, for better illustrating the effect on the user total positioning error,")
14 Second order relativistic effects have also been considered, see [Ref. 15.]. The used evolution of a simple quadratic function can be expressed as: where: is a quadratic function, is the second-order relativistic correction due to the gravitational coefficient, and is a snapshot estimation term constrained to be small (a few cm). A Galileo-only ODTS process, with a basic configuration of 72h for the arc length, 5 iterations, a sample rate of 5 minutes, with a 17-stations tracking network, was run with three different configurations: Simple Clock Model, in which is not considered Clock Model + Snapshot, in which is considered, constrained to within an order of 10 cm. Snapshot, following the standard snapshot mode. The ODTS orbit and clock estimation and prediction results are shown in Figure 11 below. The reference scenario was generated with a GPS + Galileo ODTS process, with a larger 59-stations tracking network. Please note that for clocks, results are expressed in ns. Prediction results have also been combined and projected in to the Worst User Location (WUL, see Annex A), for better illustrating the effect on the user total positioning error, realistically aggregating both orbit and clock prediction errors. Orbit Estimation Error (RMS, cm) Clock Estimation Error (RMS, ns) Orbit Prediction Error (3h, RMS, cm) Clock Prediction Error (3h, RMS, ns) Orbit & Clock Prediction Error WUL Projection (3h, RMS, cm) Figure 11: ODTS Results


15 The obtained results can be summarised as follows: A pure clock model strategy might degrade the orbit estimation and prediction accuracies when compared with a pure snapshot strategy, whereas the clock estimation and prediction would slightly improve. It can thus be concluded that it would be feasible to estimate Galileo satellite clocks by using a simple quadratic model and still obtain acceptable results. This option would be very interesting for providing robustness in degraded scenarios, for example in scenarios with reduced number of tracking stations. Both clock and orbit estimation and prediction might improve, when compared with a pure snapshot strategy, if a clock model plus snapshot mixed strategy was used. This approach is very promising for improving the performances of current high accuracy navigation processes. Please note that Figure 10 and Orbit Estimation Error in Figure 11 seem inconsistent. In Figure 10, the covariance is significantly smaller for the No snapshot satellite clocks case than for the Standard estimation case, whereas in Figure 11, the error for the Simple clock model case is larger than for the Snapshot case. The explanation for the apparent inconsistency lies in the fact that the covariance analysis represents a theoretical approach, whereas the orbit estimation errors depicted in Figure 11 have been generated in real ODTS processes, in which, as previously mentioned, the satellite clocks do not behave as perfect simple models. The correct interpretation of the obtained results is as follows: the ODTS process uncertainty, and thus the ODTS products performance, would improve, in theory, if satellite clocks were able to be modelled. In real ODTS processes, real satellite clocks are not able to be perfectly modelled, and thus, the potential accuracy improvement is not totally reached. However, the use of clock models can have other advantages, beyond accuracy, related to the following two points: Just a few parameters are needed to be estimated for fitting a simple clock model The computational complexity of the ODTS process is significantly reduced when simple clock models are used, instead of the standard snapshot strategy These facts imply that ODTS processes are much more robust when clock models are used. This can be especially positive in certain degraded scenarios, for example when using extremely reduced station networks. For illustrating this last assertion, [Ref. 8.] can be consulted, where dedicated analyses with Galileo satellite clocks and networks with as less as 9 stations were performed. It was shown that in scenarios with extremely reduced networks, orbit and clock products generation is feasible, and that the use of clock models significantly improves the attainable performances. The obtained results are summarised in Table 3, and Figure 12 below. The consistency of the clock bias and orbit products over an overlapped period of 1 day was assessed. Four ODTS processes were carried out; in two of them, the clock bias at each epoch was estimated on a snapshot basis whereas, in the other two executions, a physical clock modelling within the ODTS process was used. The orbit and clock consistency results are shown in Figure 12. The numerical results are summarized in Table 3 for an easier inspection. Figure 12: Orbit (left) and Clock bias (right) consistency Table 3: Orbit and clock consistency (figures) Processing type Orbit Error (cm) Clock Error (ns) Model + constrained snapshot Snapshot
16 The obtained results show that a significant enhancement of the accuracy of the Galileo s orbit and clock bias estimation can be achieved when considering a physical clock modelling within the ODTS with reduced tracking station networks. This improvement is mainly driven by the stability and predictability of the on board clocks in the Galileo constellation. In scenarios with large networks, with about 50 tracking stations and more, the performances improvement is almost negligible, see [Ref. 8.]. Please note that the clock modelling analysis presented in this section has been carried out ignoring the impact of the jumps, gaps, oscillations and discontinuities observed in previous sections. But the presence of the mentioned irregularities is not to be neglected. In absence of anomalies, Galileo clocks performances are excellent: highly stable, quite predictable and able to be accurately modelled with simple functions, however the realization of those excellent performances is often disturbed by certain events or operations, which cause the clock performances to degrade, especially those for the long term. FURTHER WORK Regarding Galileo, we would dare to say that it is possible that the occurrence of operational and/or testing events, not inherent in the clock behaviour, which have shown to cause the Galileo clock performance statistics to degrade, will be largely reduced as the system deployment evolves and matures. In that case, the Galileo satellite clocks analyses presented in this paper would be able to be reproduced, covering a different time span, and more significant results would probably be obtained. Further clock modelling testing and analysis activities could be carried out, with different configurations, in different ODTS scenarios, for better assessing the advantages and drawbacks of the different considered clock estimation and prediction strategies in the ODTS processes. CONCLUSIONS A series of apparent satellite clocks, for GPS, GLONASS, Galileo and BeiDou has been generated, covering a 4- month-long time span Discontinuities and jumps were observed for some of the satellite clocks, especially for BeiDou and Galileo. Clock stability analyses have been performed, showing results coherent with the different technologies used for the satellite frequency standards, and with the anomalous behaviours observed in the apparent clock time series. For short averaging times, the newest GPS block IIF and the Galileo constellation satellite clocks, are the ones showing better stability results. TBC (frequency analyses) Short, middle and long term period clock predictions have been generated and analysed. In absence of anomalies and events, the Galileo satellites clock prediction performances are in the same magnitude order or even better than the ones obtained for other GNSS constellations clocks. Different ODTS clock modelling strategies have been implemented and tested. Pure simple model, and mixed simple model with snapshot strategy, have been implemented and compared with respect to the standard pure snapshot strategy. A pure clock model strategy has been found to slightly degrade the orbit estimation and prediction accuracies when compared with a pure snapshot strategy, whereas the clock estimation and prediction performances have been found to slightly improve. This option would be very interesting for providing robustness in degraded scenarios, for example in scenarios with reduced number of tracking stations. Both clock and orbit estimation and prediction might improve, when compared with a pure snapshot strategy, if a clock model plus snapshot mixed strategy was used. This approach is very promising for improving the performances of current high accuracy navigation processes. The obtained results about clock stability, clock predictability and clock modelling, are interesting for supporting the definition of potential future Galileo evolutions.
, we get: Re 2 2 OD _ user R A C a Where R is the radial error, A")
17 ANNEX A: PROJECTION INTO THE WORST USER LOCATION (WUL) The projection of the orbital error into the user direction ɛ OD_user, see Figure 13, can be bounded as follows: 2 2 Re OD _ user R A C cos E a Figure 13: Projection of the orbital error into the user direction And for the worst user location, for which cos E = 1 (E=0 degrees), we get: Re 2 2 OD _ user R A C a Where R is the radial error, A is the along-track error and C is the cross-track error. Taking into account that the semi-major axis of the GPS orbits is 26,560 km approximately, same for GLONASS is 25,440 km, for Galileo 29,599.8 km and the Earth s radius is km, we get: R e a R e R e ( GPS ) a ( GLONASS ) ( GALILEO) a Note that the projection into the WUL is, strictly speaking, more conservative than the projection into a user with 0º elevation angle, since for the WUL projection, the absolute value of the radial error is considered, which is, by definition, larger than its true value considering the actual sign. For coherence with this projection, also the radial error has been considered in absolute value for the projections into the other elevation angle values. In the end, has to be remarked that this strategy is somewhat conservative, and thus its application results into error values which are reasonable, but slightly larger than those which would have been obtained considering the value with its actual sign. ACKNOWLEDGMENTS Thank you very much to Dr Valentín de la Rubia for your inestimable support in the paper preparation.
18 REFERENCES [Ref. 1.] [Ref. 2.] Problem behind failing clocks identified [Ref. 3.] Píriz, R., Mozo, A., Navarro, P., Rodríguez, D., "magicgnss: Precise GNSS Products Out of the Box," Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2008), Savannah, GA, September 2008, pp [Ref. 4.] Píriz, R., Calle, D., Mozo, A., Navarro, P., Rodríguez, D., Tobías, G., "Orbits and Clocks for GLONASS Precise- Point-Positioning, "Proceedings of the 22nd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2009), Savannah, GA, September 2009, pp [Ref. 5.] Píriz, Ricardo, Cerretto, Giancarlo, Perucca, Andrea, Tavella, Patrizia, "Evaluation of the Time and Frequency Transfer Capabilities of a Network of GNSS Receivers Located in Timing Laboratories," Proceedings of the 41st Annual Precise Time and Time Interval Systems and Applications Meeting, Santa Ana Pueblo, New Mexico, November 2009, pp [Ref. 6.] R. Píriz, D. Calle GMV, Madrid, Spain; C. Plantard, G. Cerretto INRiM, Torino, Italy, Smartphone application for the near-real time synchronization and monitoring of clocks through a network of GNSS receivers, EFTF [Ref. 7.] Tobías, Guillermo, Calle, J. David, Navarro, Pedro, Rodríguez, Irma, Rodríguez, Daniel, "magicgnss Real-Time POD and PPP Multi-GNSS Service," Proceedings of the 27 th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, Florida, September 2014, pp [Ref. 8.] Tobías, G., García, A.J., García, C., Laínez, M.D., Navarro, P.F., Rodríguez, I., "Advanced GNSS Algorithms and Services Based on Highly-stable On-board Clocks," Proceedings of the 28th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2015), Tampa, Florida, September 2015, pp [Ref. 9.] magicgnss Website: [Ref. 10.] [Ref. 11.] Passive Hydrogen Maser Specifications [Ref. 12.] magicppp Correction Service: [Ref. 13.] A. Jeanmaire, P.Rochat, F.Emma, "Rubidium Atomic Clock For Galileo," Proceedings of the 31st Annual Precise Time and Time Interval Systems and Applications Meeting, Santa Ana Pueblo, New Mexico, December [Ref. 14.] Laínez, M.D., Romay, M.M., "OD&TS Process Evolution Based on Interoperability Between Different Navigation Satellite Systems," Proceedings of the 22nd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2009), Savannah, GA, September 2009, pp [Ref. 15.] J. Kouba, Improved relativistic transformations in GPS, GPS Solutions Vol. 8, No. 3, pp , 2004 [Ref. 16.] Rochat, P & Droz, Fabien & Wang, Qinghua & Froidevaux, Sylvère. (2012). Atomic Clocks and Timing Systems in Global Navigation Satellite Systems. [Ref. 17.] Time Synchronization and Performance of BeiDou Satellite Clocks in Orbit, Han Chunhao, Cai Zhiwu, Lin Yuting, Liu Li, Xiao Shenghong, Zhu Lingfeng, andwang Xianglei, Beijing Satellite Navigation Center, Beijing , China, [Ref. 18.] Galileo Orbital and Technical Parameters: [Ref. 19.] Galileo Constellation Information:
19 [Ref. 20.] GPS Bock II Satellite Information: ftp://tycho.usno.navy.mil/pub/gps/gpsb2.txt [Ref. 21.] GLONASS Constellation Status: [Ref. 22.] BeiDou Constellation Status: [Ref. 23.] ESA Navipedia, European Space Agency. navipedia.net [Ref. 24.] [Ref. 25.] K. Senior, J. Ray, R.L. Beard: Characterisation of periodic variations in the GPS satellite clocks, GPS Solut. 12(3), (2008). [Ref. 26.] Arkadiusz Szumski, Guenter W. Hein, Finding the Interference, Karunhen-Loeve Transform as an Instrument to Detect Weak RF Signals, InsideGNSS, May-June 2011
Update on the In-orbit Performances of GIOVE Clocks
 Update on the In-orbit Performances of GIOVE Clocks Pierre Waller, Francisco Gonzalez, Stefano Binda, ESA/ESTEC Ilaria Sesia, Patrizia Tavella, INRiM Irene Hidalgo, Guillermo Tobias, GMV Abstract The Galileo
Update on the In-orbit Performances of GIOVE Clocks Pierre Waller, Francisco Gonzalez, Stefano Binda, ESA/ESTEC Ilaria Sesia, Patrizia Tavella, INRiM Irene Hidalgo, Guillermo Tobias, GMV Abstract The Galileo
IN-ORBIT PERFORMANCE ASSESSMENT OF GIOVE CLOCKS
 IN-ORBIT PERFORMANCE ASSESSMENT OF GIOVE CLOCKS Pierre Waller European Space Agency ESTEC E-mail: pierre.waller@esa.int F. Gonzalez, J. Hahn, S. Binda, ESA-ESTEC, Noordwijk, The Netherlands R. Piriz, I.
IN-ORBIT PERFORMANCE ASSESSMENT OF GIOVE CLOCKS Pierre Waller European Space Agency ESTEC E-mail: pierre.waller@esa.int F. Gonzalez, J. Hahn, S. Binda, ESA-ESTEC, Noordwijk, The Netherlands R. Piriz, I.
Research Article Time Synchronization and Performance of BeiDou Satellite Clocks in Orbit
 Navigation and Observation Volume 213, Article ID 37145, 5 pages http://dx.doi.org/1.1155/213/37145 Research Article Time Synchronization and Performance of BeiDou Satellite Clocks in Orbit Han Chunhao,
Navigation and Observation Volume 213, Article ID 37145, 5 pages http://dx.doi.org/1.1155/213/37145 Research Article Time Synchronization and Performance of BeiDou Satellite Clocks in Orbit Han Chunhao,
Research of Satellite and Ground Time Synchronization Based on a New Navigation System
 Research of Satellite and Ground Time Synchronization Based on a New Navigation System Yang Yang, Yufei Yang, Kun Zheng and Yongjun Jia Abstract The new navigation time synchronization method is a breakthrough
Research of Satellite and Ground Time Synchronization Based on a New Navigation System Yang Yang, Yufei Yang, Kun Zheng and Yongjun Jia Abstract The new navigation time synchronization method is a breakthrough
Improved GNSS-Based Precise Orbit Determination by using highly accurate clocks
 Improved GNSS-Based Precise Orbit Determination by using highly accurate clocks A. Susnik 1, R. Dach 1, K. Wang 2, M. Meindl 2, M. Rothacher 2, D. Koch 2, T. Romanyuk 3, I. Selmke 3, U. Hugentobler 3,
Improved GNSS-Based Precise Orbit Determination by using highly accurate clocks A. Susnik 1, R. Dach 1, K. Wang 2, M. Meindl 2, M. Rothacher 2, D. Koch 2, T. Romanyuk 3, I. Selmke 3, U. Hugentobler 3,
EUROPEAN GNSS (GALILEO) INITIAL SERVICES NAVIGATION SOLUTIONS POWERED BY E U R O P E OPEN SERVICE QUARTERLY PERFORMANCE REPORT
 INITIAL SERVICES NAVIGATION SOLUTIONS POWERED BY E U R O P E OPEN SERVICE QUARTERLY PERFORMANCE REPORT") NAVIGATION SOLUTIONS POWERED BY E U R O P E EUROPEAN GNSS (GALILEO) INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE REPORT JULY - SEPTEMBER 2017 TABLE OF CONTENTS 1 INTRODUCTION... 1 2 EXECUTIVE SUMMARY...
NAVIGATION SOLUTIONS POWERED BY E U R O P E EUROPEAN GNSS (GALILEO) INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE REPORT JULY - SEPTEMBER 2017 TABLE OF CONTENTS 1 INTRODUCTION... 1 2 EXECUTIVE SUMMARY...
EUROPEAN GNSS (GALILEO) INITIAL SERVICES NAVIGATION SOLUTIONS POWERED BY E U R O P E OPEN SERVICE QUARTERLY PERFORMANCE REPORT
 INITIAL SERVICES NAVIGATION SOLUTIONS POWERED BY E U R O P E OPEN SERVICE QUARTERLY PERFORMANCE REPORT") NAVIGATION SOLUTIONS POWERED BY E U R O P E EUROPEAN GNSS (GALILEO) INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE REPORT OCTOBER - DECEMBER 2017 TABLE OF CONTENTS 1 INTRODUCTION... 1 2 EXECUTIVE
NAVIGATION SOLUTIONS POWERED BY E U R O P E EUROPEAN GNSS (GALILEO) INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE REPORT OCTOBER - DECEMBER 2017 TABLE OF CONTENTS 1 INTRODUCTION... 1 2 EXECUTIVE
GNSS: Global Navigation Satellite Systems
 GNSS: Global Navigation Satellite Systems Global: today the American GPS (Global Positioning Service), http://gps.losangeles.af.mil/index.html the Russian GLONASS, http://www.glonass-center.ru/frame_e.html
GNSS: Global Navigation Satellite Systems Global: today the American GPS (Global Positioning Service), http://gps.losangeles.af.mil/index.html the Russian GLONASS, http://www.glonass-center.ru/frame_e.html
GNSS space clocks assessment based on different IGS and MGEX data. Tung Thanh Thai, Giovanna Signorile, Ilaria Sesia
 GNSS space clocks assessment based on different IGS and MGEX data Tung Thanh Thai, Giovanna Signorile, Ilaria Sesia 1 INRIM and GNSS Time Metrology INRIM is involved in characterization of atomic clocks
GNSS space clocks assessment based on different IGS and MGEX data Tung Thanh Thai, Giovanna Signorile, Ilaria Sesia 1 INRIM and GNSS Time Metrology INRIM is involved in characterization of atomic clocks
EUROPEAN GNSS (GALILEO) INITIAL SERVICES NAVIGATION SOLUTIONS POWERED BY E U R O P E OPEN SERVICE QUARTERLY PERFORMANCE REPORT
 INITIAL SERVICES NAVIGATION SOLUTIONS POWERED BY E U R O P E OPEN SERVICE QUARTERLY PERFORMANCE REPORT") NAVIGATION SOLUTIONS POWERED BY E U R O P E EUROPEAN GNSS (GALILEO) INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE REPORT APRIL - JUNE 2018 GALILEO INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE
NAVIGATION SOLUTIONS POWERED BY E U R O P E EUROPEAN GNSS (GALILEO) INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE REPORT APRIL - JUNE 2018 GALILEO INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE
AN EVALUATION OF VARIOUS SPACE CLOCKS FOR GPS IIF
 33rdAnnual Precise Time and Time Interval ( P P I )Meeting AN EVALUATION OF VARIOUS SPACE CLOCKS FOR GPS IIF V. Nuth, W. A. Feess, and C. Wu The Aerospace Corporation 2350 E. El Segundo Blvd., M4/962,
33rdAnnual Precise Time and Time Interval ( P P I )Meeting AN EVALUATION OF VARIOUS SPACE CLOCKS FOR GPS IIF V. Nuth, W. A. Feess, and C. Wu The Aerospace Corporation 2350 E. El Segundo Blvd., M4/962,
Status of the Gravitational Redshift Test with Eccentric Galileo Satellites
 Status of the Gravitational Redshift Test with Eccentric Galileo Satellites J. Ventura-Traveset, R. Prieto-Cerdeira, D. Blonski ICG 11, Sochi, 7 November 2016 Contents 1. Galileo satellites 5 & 6 Status
Status of the Gravitational Redshift Test with Eccentric Galileo Satellites J. Ventura-Traveset, R. Prieto-Cerdeira, D. Blonski ICG 11, Sochi, 7 November 2016 Contents 1. Galileo satellites 5 & 6 Status
STUDIES OF NPL S CLOCK ENSEMBLE ALGORITHM
 43 rd Annual Precise Time and Time Interval (PTTI) Systems and Applications Meeting STUDIES OF NPL S CLOCK ENSEMBLE ALGORITHM Setnam L. Shemar, John A. Davis, and Peter B. Whibberley National Physical
43 rd Annual Precise Time and Time Interval (PTTI) Systems and Applications Meeting STUDIES OF NPL S CLOCK ENSEMBLE ALGORITHM Setnam L. Shemar, John A. Davis, and Peter B. Whibberley National Physical
An Improvement of Rinex-Shift Algorithm for Continuous GPS Carrier-Phase Time Transfer (Final Version).pdf
.pdf") University of Colorado Boulder From the SelectedWorks of Jian Yao 2014 An Improvement of Rinex-Shift Algorithm for Continuous GPS Carrier-Phase Time Transfer (Final Version).pdf Jian Yao, University of
University of Colorado Boulder From the SelectedWorks of Jian Yao 2014 An Improvement of Rinex-Shift Algorithm for Continuous GPS Carrier-Phase Time Transfer (Final Version).pdf Jian Yao, University of
Galileo Extended Slots Characterisation and Relation with the Nominal Constellation
 Galileo Extended Slots Characterisation and Relation with the Nominal Constellation By Andrés AYALA, ) Rubén CASTRO, 2) Nityaporn SIRIKAN, 3) Daniel BLONSKI, 3) and Daniel NAVARRO 3) ) ESTEC, European
Galileo Extended Slots Characterisation and Relation with the Nominal Constellation By Andrés AYALA, ) Rubén CASTRO, 2) Nityaporn SIRIKAN, 3) Daniel BLONSKI, 3) and Daniel NAVARRO 3) ) ESTEC, European
Operational Support by ESOC s GRAS Ground Support Network - Status and Outlook
 ESA UNCLASSIFIED Releasable to the public Operational Support by ESOC s GRAS Ground Support Network - Status and Outlook R. Zandbergen, F.Wollenweber, C.Marquardt, W. Enderle and the ESOC and EUMETSAT
ESA UNCLASSIFIED Releasable to the public Operational Support by ESOC s GRAS Ground Support Network - Status and Outlook R. Zandbergen, F.Wollenweber, C.Marquardt, W. Enderle and the ESOC and EUMETSAT
Latest & future Evolutions. Atomic Clocks for. Global Navigation Satellites. Workshop H2020 Space' September 2016 Satellites Navigation
 Latest & future Evolutions on Atomic Clocks for Global Navigation Satellites Workshop H2020 Space' 26-28 September 2016 Satellites Navigation Presentation outline Standard GNSS RAFS space heritage Robust
Latest & future Evolutions on Atomic Clocks for Global Navigation Satellites Workshop H2020 Space' 26-28 September 2016 Satellites Navigation Presentation outline Standard GNSS RAFS space heritage Robust
AIM RS: Radio Science Investigation with AIM
 Prepared by: University of Bologna Ref. number: ALMARS012016 Version: 1.0 Date: 08/03/2017 PROPOSAL TO ESA FOR AIM RS Radio Science Investigation with AIM ITT Reference: Partners: Radio Science and Planetary
Prepared by: University of Bologna Ref. number: ALMARS012016 Version: 1.0 Date: 08/03/2017 PROPOSAL TO ESA FOR AIM RS Radio Science Investigation with AIM ITT Reference: Partners: Radio Science and Planetary
Principles of the Global Positioning System Lecture 14
 12.540 Principles of the Global Positioning System Lecture 14 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 Propagation Medium Propagation: Signal propagation from satellite to receiver Light-time
12.540 Principles of the Global Positioning System Lecture 14 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 Propagation Medium Propagation: Signal propagation from satellite to receiver Light-time
Week 02. Assist. Prof. Dr. Himmet KARAMAN
 Week 02 Assist. Prof. Dr. Himmet KARAMAN Contents Satellite Orbits Ephemerides GPS Review Accuracy & Usage Limitation Reference Systems GPS Services GPS Segments Satellite Positioning 2 Satellite Orbits
Week 02 Assist. Prof. Dr. Himmet KARAMAN Contents Satellite Orbits Ephemerides GPS Review Accuracy & Usage Limitation Reference Systems GPS Services GPS Segments Satellite Positioning 2 Satellite Orbits
Global Navigation Satellite Systems
 Global Navigation Satellite Systems GPS GLONASS Galileo BeiDou I I (COMPASS)? How Does a GNSS Work? Based on principle of triangulation Also called satellite ranging Signal travels at constant speed (3.0x10
Global Navigation Satellite Systems GPS GLONASS Galileo BeiDou I I (COMPASS)? How Does a GNSS Work? Based on principle of triangulation Also called satellite ranging Signal travels at constant speed (3.0x10
ESTIMATION AND PREDICTION OF THE GIOVE CLOCKS
 ESTIMATION AND PREDICTION OF THE GIOVE CLOCKS Irene Hidalgo GMV, Madrid, Spain E-mail: ihidalgo@gmv.com R. Píriz, A. Mozo, G. Tobias, P. Tavella *, I. Sesia *, G. Cerretto *, P. Waller +, F. González +,
ESTIMATION AND PREDICTION OF THE GIOVE CLOCKS Irene Hidalgo GMV, Madrid, Spain E-mail: ihidalgo@gmv.com R. Píriz, A. Mozo, G. Tobias, P. Tavella *, I. Sesia *, G. Cerretto *, P. Waller +, F. González +,
Evaluation on the Multi-GNSS Precise Orbit and Clock Products
 Evaluation on the Multi-GNSS Precise Orbit and Clock Products Fei Guo 1, 2, Xingxing Li 3, Xiaohong Zhang 1, Jinling Wang 2 1 School of Geodesy and Geomatics, Wuhan University, China 2 School of Civil
Evaluation on the Multi-GNSS Precise Orbit and Clock Products Fei Guo 1, 2, Xingxing Li 3, Xiaohong Zhang 1, Jinling Wang 2 1 School of Geodesy and Geomatics, Wuhan University, China 2 School of Civil
Understanding the Differences between LS Algorithms and Sequential Filters
 Understanding the Differences between LS Algorithms and Sequential Filters In order to perform meaningful comparisons between outputs from a least squares (LS) orbit determination algorithm and orbit determination
Understanding the Differences between LS Algorithms and Sequential Filters In order to perform meaningful comparisons between outputs from a least squares (LS) orbit determination algorithm and orbit determination
NEW EUMETSAT POLAR SYSTEM ATTITUDE MONITORING SOFTWARE
 NEW EUMETSAT POLAR SYSTEM ATTITUDE MONITORING SOFTWARE Pablo García Sánchez (1), Antonio Pérez Cambriles (2), Jorge Eufrásio (3), Pier Luigi Righetti (4) (1) GMV Aerospace and Defence, S.A.U., Email: pgarcia@gmv.com,
NEW EUMETSAT POLAR SYSTEM ATTITUDE MONITORING SOFTWARE Pablo García Sánchez (1), Antonio Pérez Cambriles (2), Jorge Eufrásio (3), Pier Luigi Righetti (4) (1) GMV Aerospace and Defence, S.A.U., Email: pgarcia@gmv.com,
Accuracy Assessment of SGP4 Orbit Information Conversion into Osculating Elements
 Accuracy Assessment of SGP4 Orbit Information Conversion into Osculating Elements Saika Aida (1), Michael Kirschner (2) (1) DLR German Space Operations Center (GSOC), Oberpfaffenhofen, 82234 Weßling, Germany,
Accuracy Assessment of SGP4 Orbit Information Conversion into Osculating Elements Saika Aida (1), Michael Kirschner (2) (1) DLR German Space Operations Center (GSOC), Oberpfaffenhofen, 82234 Weßling, Germany,
Atomic Clocks Technologies. Pascal Rochat / Managing Director
 Atomic Clocks Technologies Pascal Rochat / Managing Director 1 Clocks comparaison chart Products overview (Q4 2017): isource+ Rb Oscillators COMPONENTS ispace+ Low SWaP Oscillators OCX O isync+ ireference+
Atomic Clocks Technologies Pascal Rochat / Managing Director 1 Clocks comparaison chart Products overview (Q4 2017): isource+ Rb Oscillators COMPONENTS ispace+ Low SWaP Oscillators OCX O isync+ ireference+
AN ANOMALY CLOCK DETECTION ALGORITHM FOR A ROBUST CLOCK ENSEMBLE
 4 st Annual Precise Time and Time Interval (PTTI) Meeting AN ANOMALY CLOCK DETECTION ALGORITHM FOR A ROBUST CLOCK ENSEMBLE Qinghua Wang and Pascal Rochat SpectraTime Vauseyon 9, Neuchâtel, Switzerland
4 st Annual Precise Time and Time Interval (PTTI) Meeting AN ANOMALY CLOCK DETECTION ALGORITHM FOR A ROBUST CLOCK ENSEMBLE Qinghua Wang and Pascal Rochat SpectraTime Vauseyon 9, Neuchâtel, Switzerland
An Ensemble of Atomic Fountains
 An Ensemble of Atomic Fountains Steven Peil, Scott Crane, James Hanssen, Thomas B. Swanson and Christopher R. Ekstrom Clock Development Division United States Naval Observatory Washington, DC 39 Abstract
An Ensemble of Atomic Fountains Steven Peil, Scott Crane, James Hanssen, Thomas B. Swanson and Christopher R. Ekstrom Clock Development Division United States Naval Observatory Washington, DC 39 Abstract
Orbit Representation
 7.1 Fundamentals 223 For this purpose, code-pseudorange and carrier observations are made of all visible satellites at all monitor stations. The data are corrected for ionospheric and tropospheric delays,
7.1 Fundamentals 223 For this purpose, code-pseudorange and carrier observations are made of all visible satellites at all monitor stations. The data are corrected for ionospheric and tropospheric delays,
Latest improvements in CODE's IGS MGEX solution
 Latest improvements in CODE's IGS MGEX solution L. Prange, R. Dach, G. Beutler, D. Sidorov, A. Villiger, S. Schaer, A. Jäggi Astronomical Institute, University of Bern, Switzerland Federal office of topography
Latest improvements in CODE's IGS MGEX solution L. Prange, R. Dach, G. Beutler, D. Sidorov, A. Villiger, S. Schaer, A. Jäggi Astronomical Institute, University of Bern, Switzerland Federal office of topography
GIOVE-A APPARENT CLOCK ASSESSMENT AND RESULTS
 GIOVE-A APPARENT CLOCK ASSESSMENT AND RESULTS Jörg H. Hahn Galileo Project Office, European Space Agency/ESTEC, Noordwijk, The Netherlands, joerg.hahn@esa.int Francisco Gonzalez *, Pierre Waller *, Daniel
GIOVE-A APPARENT CLOCK ASSESSMENT AND RESULTS Jörg H. Hahn Galileo Project Office, European Space Agency/ESTEC, Noordwijk, The Netherlands, joerg.hahn@esa.int Francisco Gonzalez *, Pierre Waller *, Daniel
SPACE PASSIVE HYDROGEN MASER PERFORMANCES, LIFETIME DATA, AND GIOVE-B-RELATED TELEMETRIES
 SPACE PASSIVE HYDROGEN MASER PERFORMANCES, LIFETIME DATA, AND GIOVE-B-RELATED TELEMETRIES Marco Belloni Selex Galileo, Italy E-mail: marco.belloni@selexgalileo.com M. Gioia, S. Beretta Selex Galileo, Italy
SPACE PASSIVE HYDROGEN MASER PERFORMANCES, LIFETIME DATA, AND GIOVE-B-RELATED TELEMETRIES Marco Belloni Selex Galileo, Italy E-mail: marco.belloni@selexgalileo.com M. Gioia, S. Beretta Selex Galileo, Italy
GALILEO CONSTELLATION: EVALUATION OF STATION KEEPING STRATEGIES.
 GALILEO CONSTELLATION: EVALUATION OF STATION KEEPING STRATEGIES Daniel Navarro-Reyes (1), Anna Notarantonio (), Giacomo Taini (3) (1) ESA, ESTEC Keplerlaan 1 Noordwijk The Netherlands, +31 71 5658313,
GALILEO CONSTELLATION: EVALUATION OF STATION KEEPING STRATEGIES Daniel Navarro-Reyes (1), Anna Notarantonio (), Giacomo Taini (3) (1) ESA, ESTEC Keplerlaan 1 Noordwijk The Netherlands, +31 71 5658313,
Figure from Mike Rymer, USGS
 Ge111A Winter 2009 3/5/2009 1 Figure from Mike Rymer, USGS Ge111A Winter 2009 3/5/2009 2 Ge111A Winter 2009 3/5/2009 3 SWIR image made from ASTER data Ge111A Winter 2009 3/5/2009 4 Ge111A Winter 2009 3/5/2009
Ge111A Winter 2009 3/5/2009 1 Figure from Mike Rymer, USGS Ge111A Winter 2009 3/5/2009 2 Ge111A Winter 2009 3/5/2009 3 SWIR image made from ASTER data Ge111A Winter 2009 3/5/2009 4 Ge111A Winter 2009 3/5/2009
Galileo System Simulation Facility
 Galileo System Simulation Facility Frank Zimmermann (1), Thomas Haak (1), Chris Hill (2) (1) VEGA Informations-Technologien GmbH Hilpertstrasse 20A 64295 Darmstadt, Germany Email: frank.zimmermann@vega.de
Galileo System Simulation Facility Frank Zimmermann (1), Thomas Haak (1), Chris Hill (2) (1) VEGA Informations-Technologien GmbH Hilpertstrasse 20A 64295 Darmstadt, Germany Email: frank.zimmermann@vega.de
Figure 1. View of ALSAT-2A spacecraft
 ALSAT-2A TRANSFER AND FIRST YEAR OPERATIONS M. Kameche (1), A.H. Gicquel (2), D. Joalland (3) (1) CTS/ASAL, 1 Avenue de la Palestine, BP 13, Arzew 31200 Oran, Algérie, email:mo_kameche@netcourrier.com
ALSAT-2A TRANSFER AND FIRST YEAR OPERATIONS M. Kameche (1), A.H. Gicquel (2), D. Joalland (3) (1) CTS/ASAL, 1 Avenue de la Palestine, BP 13, Arzew 31200 Oran, Algérie, email:mo_kameche@netcourrier.com
ARAIM DEMONSTRATOR. ITSNT th November, ENAC (Toulouse)
") ARAIM DEMONSTRATOR ITSNT 2017 15th November, ENAC (Toulouse) D. Salos, M. Mabilleau, Egis Avia N. Dahman, Airbus Defence and Space S. Feng, Imperial College of London JP. Boyero, Commission Moses1978 copyright
ARAIM DEMONSTRATOR ITSNT 2017 15th November, ENAC (Toulouse) D. Salos, M. Mabilleau, Egis Avia N. Dahman, Airbus Defence and Space S. Feng, Imperial College of London JP. Boyero, Commission Moses1978 copyright
J. G. Miller (The MITRE Corporation), W. G. Schick (ITT Industries, Systems Division)
, W. G. Schick (ITT Industries, Systems Division)") Contributions of the GEODSS System to Catalog Maintenance J. G. Miller (The MITRE Corporation), W. G. Schick (ITT Industries, Systems Division) The Electronic Systems Center completed the Ground-based
Contributions of the GEODSS System to Catalog Maintenance J. G. Miller (The MITRE Corporation), W. G. Schick (ITT Industries, Systems Division) The Electronic Systems Center completed the Ground-based
Space Surveillance with Star Trackers. Part II: Orbit Estimation
 AAS -3 Space Surveillance with Star Trackers. Part II: Orbit Estimation Ossama Abdelkhalik, Daniele Mortari, and John L. Junkins Texas A&M University, College Station, Texas 7783-3 Abstract The problem
AAS -3 Space Surveillance with Star Trackers. Part II: Orbit Estimation Ossama Abdelkhalik, Daniele Mortari, and John L. Junkins Texas A&M University, College Station, Texas 7783-3 Abstract The problem
The GPS System. Brief history of GPS.
 The GPS System. Some time ago, driven partly by commercial interest and partly by curiosity, I decided to do some research into how the GPS system actually works. To understand it at grass roots level
The GPS System. Some time ago, driven partly by commercial interest and partly by curiosity, I decided to do some research into how the GPS system actually works. To understand it at grass roots level
CLOCK REQUIREMENTS AND
 33 Annual Precise Time and Time Interval (PTTI)Meeting CLOCK REQUIREMENTS AND TRADEOFF FOR SATELLITEBASED NAVIGATION SYSTEMS E. Detoma, A. Godone2,F. Levi2,and P. Tavella2 Alenia Spazio Corso Marche, 41
33 Annual Precise Time and Time Interval (PTTI)Meeting CLOCK REQUIREMENTS AND TRADEOFF FOR SATELLITEBASED NAVIGATION SYSTEMS E. Detoma, A. Godone2,F. Levi2,and P. Tavella2 Alenia Spazio Corso Marche, 41
IGS-related multi-gnss activities at CODE
 IGS-related multi-gnss activities at CODE Lars Prange (1), Rolf Dach (1) Simon Lutz (1), Stefan Schaer (2), Adrian Jäggi (1) (1) Astronomical Institute, University of Bern, Switzerland source: http://boris.unibe.ch/57698/
IGS-related multi-gnss activities at CODE Lars Prange (1), Rolf Dach (1) Simon Lutz (1), Stefan Schaer (2), Adrian Jäggi (1) (1) Astronomical Institute, University of Bern, Switzerland source: http://boris.unibe.ch/57698/
GGSP: Realisation of the Galileo Terrestrial Reference Frame
 Galileo Geodetic Service Provider Prototype GGSP: Realisation of the Galileo Terrestrial Reference Frame Wolfgang Söhne, Johannes Ihde Federal Agency for Cartography and Geodesy Gerd Gendt, Markus Rothacher
Galileo Geodetic Service Provider Prototype GGSP: Realisation of the Galileo Terrestrial Reference Frame Wolfgang Söhne, Johannes Ihde Federal Agency for Cartography and Geodesy Gerd Gendt, Markus Rothacher
Real-Time Station Clock Synchronization for GNSS Integrity Monitoring
 Real-Time Station Clock Synchronization for GNSS Integrity Monitoring Johannes Mach, Ingrid Deuster, Robert Wolf, Theo Zink IfEN Gesellschaft für Satellitennavigation mbh (IfEN GmbH), D-85586 Poing, Germany
Real-Time Station Clock Synchronization for GNSS Integrity Monitoring Johannes Mach, Ingrid Deuster, Robert Wolf, Theo Zink IfEN Gesellschaft für Satellitennavigation mbh (IfEN GmbH), D-85586 Poing, Germany
Accelerometers for GNSS Orbit Determination
 Accelerometers for GNSS Orbit Determination Urs Hugentobler, Anja Schlicht Technische Universität München 5th International Colloquium on Scientific and Fundamental Aspects of the Galileo Programme October
Accelerometers for GNSS Orbit Determination Urs Hugentobler, Anja Schlicht Technische Universität München 5th International Colloquium on Scientific and Fundamental Aspects of the Galileo Programme October
APPLICATION OF THE GSF-1 ALGORITHM TO THE NEAR-OPTIMAL TIMESCALE PREDICTION OF THE HYDROGEN MASER
 APPLICATION OF THE GSF-1 ALGORITHM TO THE NEAR-OPTIMAL TIMESCALE PREDICTION OF THE HYDROGEN MASER Laurent-Guy Bernier METAS - Swiss Federal Office of Metrology and Accreditation Lindenweg 50, CH-3003 Bern-Wabern,
APPLICATION OF THE GSF-1 ALGORITHM TO THE NEAR-OPTIMAL TIMESCALE PREDICTION OF THE HYDROGEN MASER Laurent-Guy Bernier METAS - Swiss Federal Office of Metrology and Accreditation Lindenweg 50, CH-3003 Bern-Wabern,
NGA GNSS Division Precise Ephemeris Parameters
 NGA GNSS Division Precise Ephemeris Parameters Precise Ephemeris Units. Earth-centered, Earth-fixed Coordinate system Position Velocity GPS time Trajectory interval Standard Trajectory Optional Trajectory
NGA GNSS Division Precise Ephemeris Parameters Precise Ephemeris Units. Earth-centered, Earth-fixed Coordinate system Position Velocity GPS time Trajectory interval Standard Trajectory Optional Trajectory
COMPARISON OF ANGLES ONLY INITIAL ORBIT DETERMINATION ALGORITHMS FOR SPACE DEBRIS CATALOGUING
 COMPARISON OF ANGLES ONLY INITIAL ORBIT DETERMINATION ALGORITHMS FOR SPACE DEBRIS CATALOGUING Fran Martinez Fadrique, Alberto Águeda Maté, Joan Jorquera Grau, Jaime Fernández Sánchez, Laura Aivar García
COMPARISON OF ANGLES ONLY INITIAL ORBIT DETERMINATION ALGORITHMS FOR SPACE DEBRIS CATALOGUING Fran Martinez Fadrique, Alberto Águeda Maté, Joan Jorquera Grau, Jaime Fernández Sánchez, Laura Aivar García
This is an author-deposited version published in: Eprints ID: 16117
 Open Archive TOULOUSE Archive Ouverte (OATAO) OATAO is an open access repository that collects the work of Toulouse researchers and makes it freely available over the web where possible. This is an author-deposited
Open Archive TOULOUSE Archive Ouverte (OATAO) OATAO is an open access repository that collects the work of Toulouse researchers and makes it freely available over the web where possible. This is an author-deposited
RADAR-OPTICAL OBSERVATION MIX
 RADAR-OPTICAL OBSERVATION MIX Felix R. Hoots + Deep space satellites, having a period greater than or equal to 225 minutes, can be tracked by either radar or optical sensors. However, in the US Space Surveillance
RADAR-OPTICAL OBSERVATION MIX Felix R. Hoots + Deep space satellites, having a period greater than or equal to 225 minutes, can be tracked by either radar or optical sensors. However, in the US Space Surveillance
INTEGRATED OPERATIONAL PRECISE ORBIT DETERMINATION FOR LEO
 INTEGRATED OPERATIONAL PRECISE ORBIT DETERMINATION FOR LEO J. Fernández Sánchez, F. M. Martínez Fadrique, A. Águeda Maté, D. Escobar Antón GMV S.A., Isaac Newton, 8760 Tres Cantos, Spain, Email: jfernandez@gmv.com,
INTEGRATED OPERATIONAL PRECISE ORBIT DETERMINATION FOR LEO J. Fernández Sánchez, F. M. Martínez Fadrique, A. Águeda Maté, D. Escobar Antón GMV S.A., Isaac Newton, 8760 Tres Cantos, Spain, Email: jfernandez@gmv.com,
Time and Frequency metrology: e-infrastractures for Science and Society
 Time and Frequency metrology: e-infrastractures for Science and Society Davide Calonico Optics Division Istituto Nazionale Di Ricerca Metrologica d.calonico@inrim.it Time and Frequency Metrology: who cares?
Time and Frequency metrology: e-infrastractures for Science and Society Davide Calonico Optics Division Istituto Nazionale Di Ricerca Metrologica d.calonico@inrim.it Time and Frequency Metrology: who cares?
Test Computations
 158 7. Test Computations.3.2.1 -.1 -.2 Fourier index 2.8.4 -.4 -.8 Fourier index 2.2.1 -.1 -.2 Fourier index 3.8.4 -.4 -.8 Fourier index 3.2.1 -.1 -.2 -.3 Fourier index 4.8.4 -.4 -.8 Fourier index 4.2.1
158 7. Test Computations.3.2.1 -.1 -.2 Fourier index 2.8.4 -.4 -.8 Fourier index 2.2.1 -.1 -.2 Fourier index 3.8.4 -.4 -.8 Fourier index 3.2.1 -.1 -.2 -.3 Fourier index 4.8.4 -.4 -.8 Fourier index 4.2.1
Technical analysis of commercially hosted optical payloads for enhanced SSA
 Technical analysis of commercially hosted optical payloads for enhanced SSA Jonathan D. Lowe Analytical Graphics, Inc., Exton, Pennsylvania, 19341. Email:jlowe@agi.com David A. Vallado Center for Space
Technical analysis of commercially hosted optical payloads for enhanced SSA Jonathan D. Lowe Analytical Graphics, Inc., Exton, Pennsylvania, 19341. Email:jlowe@agi.com David A. Vallado Center for Space
AN ALGORITHM FOR THE ITALIAN ATOMIC TIME SCALE
 AN ALGORITHM FOR THE ITALIAN ATOMIC TIME SCALE F. Cordara, G. Vizio, P. Tavella, V. Pettiti Istituto Elettrotecnico Nazionale Galileo Ferraris Corso Massimo d9azeglio 42 10125 Torino - Italy Abstract During
AN ALGORITHM FOR THE ITALIAN ATOMIC TIME SCALE F. Cordara, G. Vizio, P. Tavella, V. Pettiti Istituto Elettrotecnico Nazionale Galileo Ferraris Corso Massimo d9azeglio 42 10125 Torino - Italy Abstract During
A NEW SYSTEM FOR THE GENERATION OF UTC(CH)
") A NEW SYSTEM FOR THE GENERATION OF UTC(CH) L.G. Bernier and G. Schaller METAS Swiss Federal Office of Metrology Lindenweg 50, Bern-Wabern, CH-3003, Switzerland laurent-guy.bernier@metas.ch Abstract A new
A NEW SYSTEM FOR THE GENERATION OF UTC(CH) L.G. Bernier and G. Schaller METAS Swiss Federal Office of Metrology Lindenweg 50, Bern-Wabern, CH-3003, Switzerland laurent-guy.bernier@metas.ch Abstract A new
Impact of the Envisat Mission Extension on SAR data
 Impact of the Envisat Mission Extension on SAR data Impact of Envisat extension on SAR data Prepared by nuno miranda Reference Issue 0.9 Revision Date of Issue 23 August 2010 Status Preliminary version
Impact of the Envisat Mission Extension on SAR data Impact of Envisat extension on SAR data Prepared by nuno miranda Reference Issue 0.9 Revision Date of Issue 23 August 2010 Status Preliminary version
Orbit Determination Using Satellite-to-Satellite Tracking Data
 Chin. J. Astron. Astrophys. Vol. 1, No. 3, (2001 281 286 ( http: /www.chjaa.org or http: /chjaa.bao.ac.cn Chinese Journal of Astronomy and Astrophysics Orbit Determination Using Satellite-to-Satellite
Chin. J. Astron. Astrophys. Vol. 1, No. 3, (2001 281 286 ( http: /www.chjaa.org or http: /chjaa.bao.ac.cn Chinese Journal of Astronomy and Astrophysics Orbit Determination Using Satellite-to-Satellite
SYMMETRICOM TIME-SCALE SYSTEM
 SYMMETRICOM TIME-SCALE SYSTEM Timothy Erickson, Venkatesan Ramakrishnan, Samuel R. Stein 3 Symmetricom, Inc., Boulder, CO, USA, tierickson@symmetricom.com Symmetricom, Inc., Santa Rosa, CA, USA, vramakrishnan@symmetricom.com
SYMMETRICOM TIME-SCALE SYSTEM Timothy Erickson, Venkatesan Ramakrishnan, Samuel R. Stein 3 Symmetricom, Inc., Boulder, CO, USA, tierickson@symmetricom.com Symmetricom, Inc., Santa Rosa, CA, USA, vramakrishnan@symmetricom.com
Development of Algorithms for use in the Galileo Time Service Provider
 Development of Algorithms for use in the Galileo Time Service Provider D Baines 1, J A Davis 1, G Parkin 1, P Harris 1, A Batchelor 2, J. M. Pieplu 3, J. H. Hahn 4, A Bauch 5, V. Pettiti 6, P. Uhrich 7,
Development of Algorithms for use in the Galileo Time Service Provider D Baines 1, J A Davis 1, G Parkin 1, P Harris 1, A Batchelor 2, J. M. Pieplu 3, J. H. Hahn 4, A Bauch 5, V. Pettiti 6, P. Uhrich 7,
Impact of the Envisat Mission Extension on SAR data
 Impact of the Envisat Mission Extension on SAR data Impact of Envisat Mission Extension on SAR data - 1.0 Prepared by Nuno Miranda, Berthyl Duesmann, Monserrat Pinol, Davide Giudici, Davide D Aria Reference
Impact of the Envisat Mission Extension on SAR data Impact of Envisat Mission Extension on SAR data - 1.0 Prepared by Nuno Miranda, Berthyl Duesmann, Monserrat Pinol, Davide Giudici, Davide D Aria Reference
JAC Conjunction Assessment
 JAC Conjunction Assessment SSA Operators Workshop Denver, Colorado November 3-5, 2016 François LAPORTE Operational Flight Dynamics CNES Toulouse Francois.Laporte@cnes.fr SUMMARY CA is not an easy task:
JAC Conjunction Assessment SSA Operators Workshop Denver, Colorado November 3-5, 2016 François LAPORTE Operational Flight Dynamics CNES Toulouse Francois.Laporte@cnes.fr SUMMARY CA is not an easy task:
Impact of the SRP model on CODE's 5- system orbit and clock solution for the MGEX
 Impact of the SRP model on CODE's 5- system orbit and clock solution for the MGEX L. Prange, E. Orliac, R. Dach, D. Arnold, G. Beutler, S. Schaer, A. Jäggi Astronomical Institute, University of Bern, Switzerland
Impact of the SRP model on CODE's 5- system orbit and clock solution for the MGEX L. Prange, E. Orliac, R. Dach, D. Arnold, G. Beutler, S. Schaer, A. Jäggi Astronomical Institute, University of Bern, Switzerland
Predicting Long-Term Telemetry Behavior for Lunar Orbiting, Deep Space, Planetary and Earth Orbiting Satellites
 Predicting Long-Term Telemetry Behavior for Lunar Orbiting, Deep Space, Planetary and Earth Orbiting Satellites Item Type text; Proceedings Authors Losik, Len Publisher International Foundation for Telemetering
Predicting Long-Term Telemetry Behavior for Lunar Orbiting, Deep Space, Planetary and Earth Orbiting Satellites Item Type text; Proceedings Authors Losik, Len Publisher International Foundation for Telemetering
ESA ITT AO/1-5209/07/NL/HE Contract No /07/NL/HE. NOVEL TIME SYNCHRONISATION TECHNIQUES FOR DEEP SPACE PROBES Executive Summary
 Page: 1 ESA ITT AO/1-5209/07/NL/HE Contract No. 21063/07/NL/HE NOVEL TIME SYNCHRONISATION TECHNIQUES FOR DEEP SPACE PROBES Executive Summary Responsibility: Name: Date: Approval: Prepared by: E. Rossini
Page: 1 ESA ITT AO/1-5209/07/NL/HE Contract No. 21063/07/NL/HE NOVEL TIME SYNCHRONISATION TECHNIQUES FOR DEEP SPACE PROBES Executive Summary Responsibility: Name: Date: Approval: Prepared by: E. Rossini
FEASIBILITY OF DIRECTLY MEASURING SINGLE LINE-OF-SIGHT GPS SIGNAL DELAYS
 FEASIBILITY OF DIRECTLY MEASURING SINGLE LINE-OF-SIGHT GPS SIGNAL DELAYS Pedro Elosegui and James L. Davis Smithsonian Astrophysical Observatory Cambridge, MA 13, USA January, 3 1 1. Executive Summary
FEASIBILITY OF DIRECTLY MEASURING SINGLE LINE-OF-SIGHT GPS SIGNAL DELAYS Pedro Elosegui and James L. Davis Smithsonian Astrophysical Observatory Cambridge, MA 13, USA January, 3 1 1. Executive Summary
ESTIMATING THE RESIDUAL TROPOSPHERIC DELAY FOR AIRBORNE DIFFERENTIAL GPS POSITIONING (A SUMMARY)
") ESTIMATING THE RESIDUAL TROPOSPHERIC DELAY FOR AIRBORNE DIFFERENTIAL GPS POSITIONING (A SUMMARY) J. Paul Collins and Richard B. Langley Geodetic Research Laboratory Department of Geodesy and Geomatics
ESTIMATING THE RESIDUAL TROPOSPHERIC DELAY FOR AIRBORNE DIFFERENTIAL GPS POSITIONING (A SUMMARY) J. Paul Collins and Richard B. Langley Geodetic Research Laboratory Department of Geodesy and Geomatics
Clocks (Time) and Navigation: from Harrison to GPS
 and Navigation: from Harrison to GPS") Clocks (Time) and Navigation: from Harrison to GPS Presented by Bill Klepczynski Global Timing Services (GTS) CAPCA Meeting 20 MAY 2013 1 Time It s present everywhere, but occupies no space We can measure
Clocks (Time) and Navigation: from Harrison to GPS Presented by Bill Klepczynski Global Timing Services (GTS) CAPCA Meeting 20 MAY 2013 1 Time It s present everywhere, but occupies no space We can measure
Surveying Prof. Bharat Lohani Department of Civil Engineering Indian Institute of Technology, Kanpur
 Surveying Prof. Bharat Lohani Department of Civil Engineering Indian Institute of Technology, Kanpur Module - 12 Lecture - 1 Global Positioning System (Refer Slide Time: 00:20) Welcome to this video lecture
Surveying Prof. Bharat Lohani Department of Civil Engineering Indian Institute of Technology, Kanpur Module - 12 Lecture - 1 Global Positioning System (Refer Slide Time: 00:20) Welcome to this video lecture
Naval Center for Space Technology U.S. Naval Research Laboratory Washington, D.C. USA. International GNSS Service
 IGS Clock Products Working Group Report Ken Senior Naval Center for Space Technology U.S. Naval Research Laboratory Washington, D.C. USA 18 th Meeting of the Consultative Committee for Time and Frequency
IGS Clock Products Working Group Report Ken Senior Naval Center for Space Technology U.S. Naval Research Laboratory Washington, D.C. USA 18 th Meeting of the Consultative Committee for Time and Frequency
Identifying a low-frequency oscillation in Galileo IOV pseudorange rates
 GPS Solut (2016) 20:363 372 DOI 10.1007/s10291-015-0443-7 ORIGINAL ARTICLE Identifying a low-frequency oscillation in Galileo IOV pseudorange rates Daniele Borio Ciro Gioia Neil Mitchison Received: 29
GPS Solut (2016) 20:363 372 DOI 10.1007/s10291-015-0443-7 ORIGINAL ARTICLE Identifying a low-frequency oscillation in Galileo IOV pseudorange rates Daniele Borio Ciro Gioia Neil Mitchison Received: 29
DEFINITION OF A REFERENCE ORBIT FOR THE SKYBRIDGE CONSTELLATION SATELLITES
 DEFINITION OF A REFERENCE ORBIT FOR THE SKYBRIDGE CONSTELLATION SATELLITES Pierre Rozanès (pierre.rozanes@cnes.fr), Pascal Brousse (pascal.brousse@cnes.fr), Sophie Geffroy (sophie.geffroy@cnes.fr) CNES,
DEFINITION OF A REFERENCE ORBIT FOR THE SKYBRIDGE CONSTELLATION SATELLITES Pierre Rozanès (pierre.rozanes@cnes.fr), Pascal Brousse (pascal.brousse@cnes.fr), Sophie Geffroy (sophie.geffroy@cnes.fr) CNES,
2. SPECTRAL ANALYSIS APPLIED TO STOCHASTIC PROCESSES
 2. SPECTRAL ANALYSIS APPLIED TO STOCHASTIC PROCESSES 2.0 THEOREM OF WIENER- KHINTCHINE An important technique in the study of deterministic signals consists in using harmonic functions to gain the spectral
2. SPECTRAL ANALYSIS APPLIED TO STOCHASTIC PROCESSES 2.0 THEOREM OF WIENER- KHINTCHINE An important technique in the study of deterministic signals consists in using harmonic functions to gain the spectral
GEOSTATIONARY/COLLOCATION MISSION ANALYSIS USING FOCUSGAT
 GEOSTATIONARY/COLLOCATION MISSION ANALYSIS USING FOCUSGAT EUROEAN SACE ASTRONOMY CENTRE (ESA/ESAC), MADRID, SAIN 3 6 MAY 010 Isabel Vera Trallero (1), Javier Cuesta Cabanás (1), Ángel Luis Cerviño (1),
GEOSTATIONARY/COLLOCATION MISSION ANALYSIS USING FOCUSGAT EUROEAN SACE ASTRONOMY CENTRE (ESA/ESAC), MADRID, SAIN 3 6 MAY 010 Isabel Vera Trallero (1), Javier Cuesta Cabanás (1), Ángel Luis Cerviño (1),
Climate Monitoring with Radio Occultation Data
 Climate Monitoring with Radio Occultation Data Systematic Error Sources C. Rocken, S. Sokolovskiy, B. Schreiner, D. Hunt, B. Ho, B. Kuo, U. Foelsche Radio Occultation Claims Most stable Global Thermometer
Climate Monitoring with Radio Occultation Data Systematic Error Sources C. Rocken, S. Sokolovskiy, B. Schreiner, D. Hunt, B. Ho, B. Kuo, U. Foelsche Radio Occultation Claims Most stable Global Thermometer
A new Solar Radiation Pressure Model for the GPS Satellites
 A new Solar Radiation Pressure Model for the GPS Satellites T.A. Springer, G. Beutler, M. Rothacher Astronomical Institute, University of Bern Sidlerstrasse 5, CH-32 Bern, Switzerland Abstract The largest
A new Solar Radiation Pressure Model for the GPS Satellites T.A. Springer, G. Beutler, M. Rothacher Astronomical Institute, University of Bern Sidlerstrasse 5, CH-32 Bern, Switzerland Abstract The largest
Possible advantages of equipping GNSS satellites with on-board accelerometers
 Possible advantages of equipping GNSS satellites with on-board accelerometers - a way to get profits - Maciej Kalarus (1) Krzysztof Sośnica (2) Agata Wielgosz (1) Tomasz Liwosz (3) Janusz B. Zielioski
Possible advantages of equipping GNSS satellites with on-board accelerometers - a way to get profits - Maciej Kalarus (1) Krzysztof Sośnica (2) Agata Wielgosz (1) Tomasz Liwosz (3) Janusz B. Zielioski
Satellite Geodesy and Navigation Present and Future
 Satellite Geodesy and Navigation Present and Future Drazen Svehla Institute of Astronomical and Physical Geodesy Technical University of Munich, Germany Content Clocks for navigation Relativistic geodesy
Satellite Geodesy and Navigation Present and Future Drazen Svehla Institute of Astronomical and Physical Geodesy Technical University of Munich, Germany Content Clocks for navigation Relativistic geodesy
Dynamic data processing recursive least-squares
 Dynamic data processing recursive least-squares Dynamic data processing recursive least-squares Delft University of Technology Department of Mathematical Geodesy and Positioning VSSD Series on Mathematical
Dynamic data processing recursive least-squares Dynamic data processing recursive least-squares Delft University of Technology Department of Mathematical Geodesy and Positioning VSSD Series on Mathematical
IN ORBIT VERIFICATION RESULTS FROM GRAS RECEIVER ON METOP-A SATELLITE
 IN ORBIT VERIFICATION RESULTS FROM GRAS RECEIVER ON METOP-A SATELLITE Marc Loiselet (1), Nico Stricker (1), Jacob Christensen (2), Carmelo Carrascosa (3) (1) ESA/ESTEC, Keplerlaan 1, 22 AG Noordwijk, The
IN ORBIT VERIFICATION RESULTS FROM GRAS RECEIVER ON METOP-A SATELLITE Marc Loiselet (1), Nico Stricker (1), Jacob Christensen (2), Carmelo Carrascosa (3) (1) ESA/ESTEC, Keplerlaan 1, 22 AG Noordwijk, The
Spatial Backfitting of Roller Measurement Values from a Florida Test Bed
 Spatial Backfitting of Roller Measurement Values from a Florida Test Bed Daniel K. Heersink 1, Reinhard Furrer 1, and Mike A. Mooney 2 1 Institute of Mathematics, University of Zurich, CH-8057 Zurich 2
Spatial Backfitting of Roller Measurement Values from a Florida Test Bed Daniel K. Heersink 1, Reinhard Furrer 1, and Mike A. Mooney 2 1 Institute of Mathematics, University of Zurich, CH-8057 Zurich 2
New satellite mission for improving the Terrestrial Reference Frame: means and impacts
 Fourth Swarm science meeting and geodetic missions workshop ESA, 20-24 March 2017, Banff, Alberta, Canada New satellite mission for improving the Terrestrial Reference Frame: means and impacts Richard
Fourth Swarm science meeting and geodetic missions workshop ESA, 20-24 March 2017, Banff, Alberta, Canada New satellite mission for improving the Terrestrial Reference Frame: means and impacts Richard
The Orbit Control of ERS-1 and ERS-2 for a Very Accurate Tandem Configuration
 The Orbit Control of ERS-1 and ERS-2 for a Very Accurate Tandem Configuration Mats Rosengren European Space Operations Centre Robert Bosch Str 5 D64293 Darmstadt Germany Email: mrosengr@esoc.esa.de Abstract
The Orbit Control of ERS-1 and ERS-2 for a Very Accurate Tandem Configuration Mats Rosengren European Space Operations Centre Robert Bosch Str 5 D64293 Darmstadt Germany Email: mrosengr@esoc.esa.de Abstract
Lee A. Breakiron U.S. Naval Observatory Washington, DC ABSTRACT
 A COMPARATIVE STUDY OF CLOCK RATE AND DRIFT ESTIMATION Lee A. Breakiron U.S. Naval Observatory Washington, DC 20392 ABSTRACT Five different methods of drift determination and four different methods of
A COMPARATIVE STUDY OF CLOCK RATE AND DRIFT ESTIMATION Lee A. Breakiron U.S. Naval Observatory Washington, DC 20392 ABSTRACT Five different methods of drift determination and four different methods of
Numerical analysis of the compliance of interplanetary CubeSats with planetary protection requirements
 Numerical analysis of the compliance of interplanetary CubeSats with planetary protection requirements Francesca Letizia, Camilla Colombo University of Southampton 5th Interplanetary CubeSat Workshop Session
Numerical analysis of the compliance of interplanetary CubeSats with planetary protection requirements Francesca Letizia, Camilla Colombo University of Southampton 5th Interplanetary CubeSat Workshop Session
ESA/ESOC Status. T. Springer, E. Schoenmann, W. Enderle. ESA/ESOC Navigation Support Office. ESA UNCLASSIFIED - For Official Use
 ESA/ESOC Status T. Springer, E. Schoenmann, W. Enderle ESA/ESOC Navigation Support Office ESA UNCLASSIFIED - For Official Use Content Issues in BIAS PP Status regarding future ILRS plans Other ILRS/SLR
ESA/ESOC Status T. Springer, E. Schoenmann, W. Enderle ESA/ESOC Navigation Support Office ESA UNCLASSIFIED - For Official Use Content Issues in BIAS PP Status regarding future ILRS plans Other ILRS/SLR
LONG-TERM TRENDS IN THE AMOUNT OF ATMOSPHERIC WATER VAPOUR DERIVED FROM SPACE GEODETIC AND REMOTE SENSING TECHNIQUES
 LONG-TERM TRENDS IN THE AMOUNT OF ATMOSPHERIC WATER VAPOUR DERIVED FROM SPACE GEODETIC AND REMOTE SENSING TECHNIQUES Rüdiger Haas, Tong Ning, and Gunnar Elgered Chalmers University of Technology, Onsala
LONG-TERM TRENDS IN THE AMOUNT OF ATMOSPHERIC WATER VAPOUR DERIVED FROM SPACE GEODETIC AND REMOTE SENSING TECHNIQUES Rüdiger Haas, Tong Ning, and Gunnar Elgered Chalmers University of Technology, Onsala
BeiDou and Galileo, Two Global Satellite Navigation Systems in Final Phase of the Construction, Visibility and Geometry
 http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 10 Number 3 September 2016 DOI: 10.12716/1001.10.03.01 BeiDou and Galileo, Two Global Satellite
http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 10 Number 3 September 2016 DOI: 10.12716/1001.10.03.01 BeiDou and Galileo, Two Global Satellite
the experience of INRIM in the Galileo project
 FIFTH MEETING OF THE INTERNATIONAL COMMITTEE ON GLOBAL NAVIGATION SATELLITE SYSTEMS (ICG) Time metrology in navigation systems: the experience of INRIM in the Galileo project Patrizia i Tavella Istituto
FIFTH MEETING OF THE INTERNATIONAL COMMITTEE ON GLOBAL NAVIGATION SATELLITE SYSTEMS (ICG) Time metrology in navigation systems: the experience of INRIM in the Galileo project Patrizia i Tavella Istituto
AN ANALYTICAL SOLUTION TO QUICK-RESPONSE COLLISION AVOIDANCE MANEUVERS IN LOW EARTH ORBIT
 AAS 16-366 AN ANALYTICAL SOLUTION TO QUICK-RESPONSE COLLISION AVOIDANCE MANEUVERS IN LOW EARTH ORBIT Jason A. Reiter * and David B. Spencer INTRODUCTION Collision avoidance maneuvers to prevent orbital
AAS 16-366 AN ANALYTICAL SOLUTION TO QUICK-RESPONSE COLLISION AVOIDANCE MANEUVERS IN LOW EARTH ORBIT Jason A. Reiter * and David B. Spencer INTRODUCTION Collision avoidance maneuvers to prevent orbital
A. Barbu, J. Laurent-Varin, F. Perosanz, F. Mercier and J. Marty. AVENUE project. June, 20
 Efficient QR Sequential Least Square algorithm for high frequency GNSS Precise Point Positioning A. Barbu, J. Laurent-Varin, F. Perosanz, F. Mercier and J. Marty AVENUE project June, 20 A. Barbu, J. Laurent-Varin,
Efficient QR Sequential Least Square algorithm for high frequency GNSS Precise Point Positioning A. Barbu, J. Laurent-Varin, F. Perosanz, F. Mercier and J. Marty AVENUE project June, 20 A. Barbu, J. Laurent-Varin,
The Statistics of GPS
 The Statistics of GPS Demetrios Matsakis U.S. Naval Observatory, 3450 Massachusetts Avenue NW, Washington, DC., USA, 20392 ABSTRACT The Global Positioning System (GPS) is an extremely effective satellite-based
The Statistics of GPS Demetrios Matsakis U.S. Naval Observatory, 3450 Massachusetts Avenue NW, Washington, DC., USA, 20392 ABSTRACT The Global Positioning System (GPS) is an extremely effective satellite-based
Lunar Satellite Attitude Determination System
 Lunar Satellite Attitude Determination System SENIOR DESIGN PROPOSAL PRESENTATION TEAM EPOCH KUPOLUYI, TOLULOPE (LEAD DEVELOPER) SONOIKI, OLUWAYEMISI (LEAD RESEARCHER) WARREN, DANAH (PROJECT MANAGER) NOVEMBER
Lunar Satellite Attitude Determination System SENIOR DESIGN PROPOSAL PRESENTATION TEAM EPOCH KUPOLUYI, TOLULOPE (LEAD DEVELOPER) SONOIKI, OLUWAYEMISI (LEAD RESEARCHER) WARREN, DANAH (PROJECT MANAGER) NOVEMBER
Gaia Astrometry Upkeeping by GNSS - Evaluation Study [GAUGES]
![Gaia Astrometry Upkeeping by GNSS - Evaluation Study [GAUGES]](/thumbs/92/109628399.jpg "Gaia Astrometry Upkeeping by GNSS - Evaluation Study [GAUGES]") Gaia Astrometry Upkeeping by GNSS - Evaluation Study [GAUGES] M. Gai, A. Vecchiato [INAF-OATo] A. Fienga, F. Vakili, J.P. Rivet, D. Albanese [OCA] Framework: Development of High Precision Astrometric Techniques
Gaia Astrometry Upkeeping by GNSS - Evaluation Study [GAUGES] M. Gai, A. Vecchiato [INAF-OATo] A. Fienga, F. Vakili, J.P. Rivet, D. Albanese [OCA] Framework: Development of High Precision Astrometric Techniques
BINARY ASTEROID ORBIT MODIFICATION
 2013 IAA PLANETARY DEFENSE CONFERENCE BEAST BINARY ASTEROID ORBIT MODIFICATION Property of GMV All rights reserved TABLE OF CONTENTS 1. Mission Concept 2. Asteroid Selection 3. Physical Principles 4. Space
2013 IAA PLANETARY DEFENSE CONFERENCE BEAST BINARY ASTEROID ORBIT MODIFICATION Property of GMV All rights reserved TABLE OF CONTENTS 1. Mission Concept 2. Asteroid Selection 3. Physical Principles 4. Space
Results and Analyses of Debris Tracking from Mt Stromlo
 Results and Analyses of Debris Tracking from Mt Stromlo Jizhang Sang 1, Ian Ritchie, Matt Pearson, and Craig Smith EOS Space Systems Pty Ltd, Australia Abstract In the last 2 years, EOS Space Systems has
Results and Analyses of Debris Tracking from Mt Stromlo Jizhang Sang 1, Ian Ritchie, Matt Pearson, and Craig Smith EOS Space Systems Pty Ltd, Australia Abstract In the last 2 years, EOS Space Systems has
OUT-OF-PLANE MANOEUVRE CAMPAIGNS FOR METOP-A: PLANNING, MODELLING, CALIBRATION AND RECONSTRUCTION. +49(0) ,
 ,") OUT-OF-PLANE MANOEUVRE CAMPAIGNS FOR METOP-A: PLANNING, MODELLING, CALIBRATION AND RECONSTRUCTION Francisco Sancho (1), David Lázaro (2), Pier Luigi Righetti (3) (1) GMV at EUMETSAT, Eumetsat-Allee 1,
OUT-OF-PLANE MANOEUVRE CAMPAIGNS FOR METOP-A: PLANNING, MODELLING, CALIBRATION AND RECONSTRUCTION Francisco Sancho (1), David Lázaro (2), Pier Luigi Righetti (3) (1) GMV at EUMETSAT, Eumetsat-Allee 1,
SSTD = Standard deviation SMA = Semi Major Axis
 - 1 C - EPC-95-212 NOVEL ORBT RASNG STRATEGY MAKES LOW THRUST COMMERCALLY VABLE. ARNON SPTZER* ABSTRACT A new technique for utilizing low thrust Electric Propulsion System (EPS) for orbit raising has been
- 1 C - EPC-95-212 NOVEL ORBT RASNG STRATEGY MAKES LOW THRUST COMMERCALLY VABLE. ARNON SPTZER* ABSTRACT A new technique for utilizing low thrust Electric Propulsion System (EPS) for orbit raising has been
Hourly Updated Precise Orbit Products of Quad-constellation
 Hourly Updated Precise Orbit Products of Quad-constellation Satellites in IGS Analysis Center at Wuhan University Qile Zhao; Hongyang Ma; Xiaolong Xu; Jing Guo; Min Li Wuhan University Jul.05 2017 Paris
Hourly Updated Precise Orbit Products of Quad-constellation Satellites in IGS Analysis Center at Wuhan University Qile Zhao; Hongyang Ma; Xiaolong Xu; Jing Guo; Min Li Wuhan University Jul.05 2017 Paris