CLOCK REQUIREMENTS AND
|
|
|
- Hugh Ferdinand Lloyd
- 5 years ago
- Views:
Transcription

1 33 Annual Precise Time and Time Interval (PTTI)Meeting CLOCK REQUIREMENTS AND TRADEOFF FOR SATELLITEBASED NAVIGATION SYSTEMS E. Detoma, A. Godone2,F. Levi2,and P. Tavella2 Alenia Spazio Corso Marche, Torino, Italy Istituto Elettrotecnico Nazionale G. Ferraris Strada delle Cacce, , Torino, Italy Abstract Satellitebased navigation systems, such as GPS, Glonass, and the planned Galileo European system rely on stable atomic clocks for their operation. Spaceborne and groundbased clocks provide the time frame allowing the users to perform passive ranging measurements and quickly locate their position [13]. From the operational point of view, timing stability enters the overall accuracy budget together with orbit estimation and operational constraints. User ranging accuracy is a complex function of many factors, and optimum selection of the clocks requirements is of paramount importance to optimize the overall system. Ideally, user range accuracy is affected by both timing and orbit estimation accuracy. In turn, both timing and orbit estimation are sffected by the oscillator intrinsic accuracy and stabila. Stability plays a role first in determining the optimum time interval over which the estimation is carried on and, secondly, in determining the maximum length of the time interval over which the computed estimates can be propagated and still be within the navigation system specifications. Operational constraints, such as the maximum uploading rate for civilhn systems, and the maximum unattended system operation vs. degraded performance for military systems, interact with purely technical considerations to define the best clock for a given application. To all this, we should add the requirements placed on the ground clocks which play a signrzant role in determining the overall system performance especially in systems (such as GPS or the planned Galileo) relying on the oneway passive ranging technique for orbit and clocks maintenance. In the paper, we will discuss the requirements forced on the clocks by the specific application, as well as the consequent tradeoff dictuted by the stability of the orbit and operational constraints. The clock constraints dictated by the simultaneous requirement to produce and disseminate timing information related to UTC (or TAI) will not be discussed, as we will limit our discussion to the aspects related to the navigation services only. In this frame, we would like also to present the rationale for the engineering development of a novelfrequency standard (a Rb passive maser) being developed by the IEN and Alenia Spa& under an ASI (Agenzia Spaziale Italiana) contract specifkally for possible applications in future navigation systems. The opinions expressed in the papers are of the authors and do not imply necessarily the endorsement of the respective organizations. 385
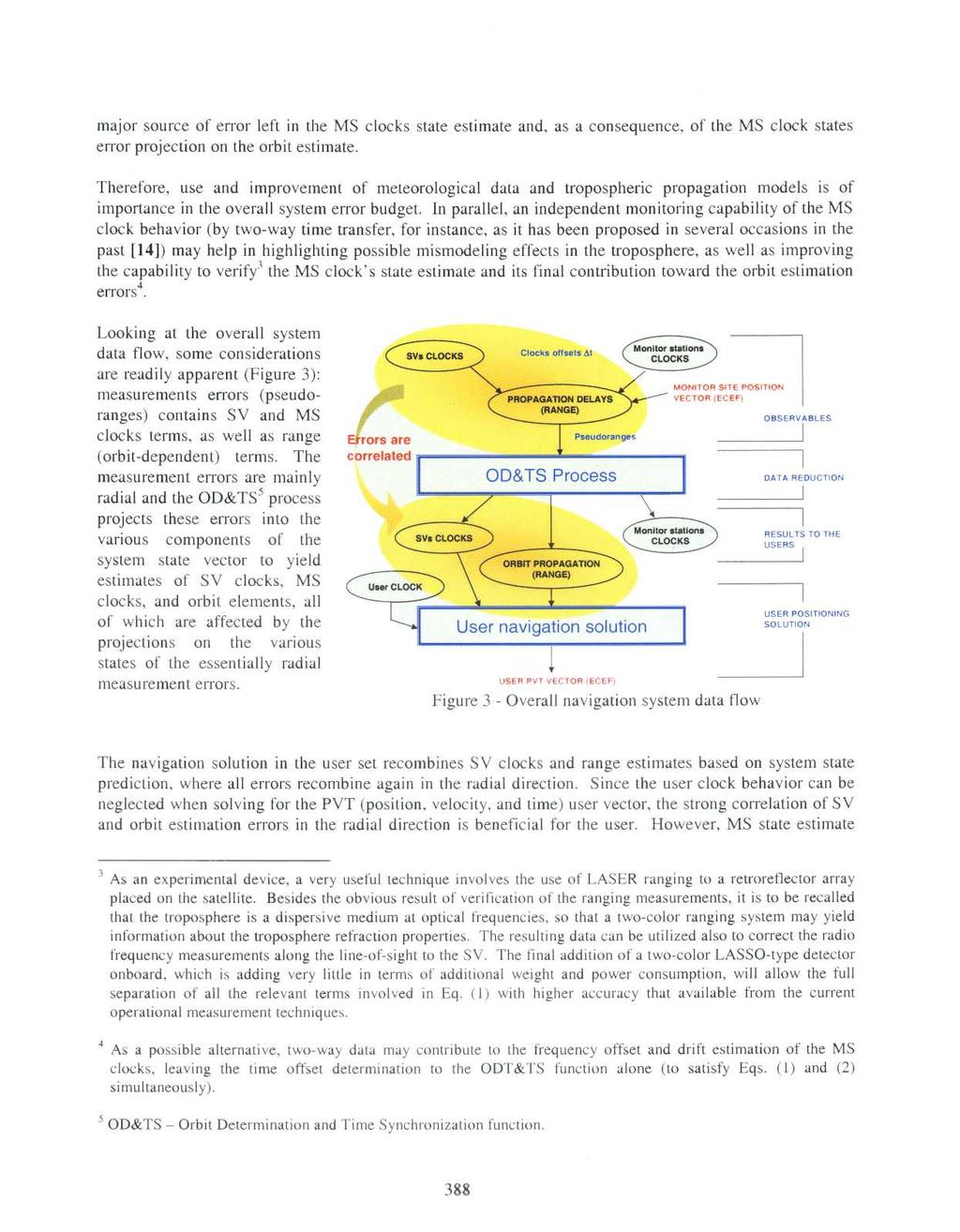
2 SYSTEM MAINTENANCE Satellitebased navigation systems use oneway ranging measurements for system orbit estimation and timekeeping. The operational advantage of oneway ranging versus twoway ranging is obvious when one considers the complexity of the ground monitoring stations in the two approaches. Oneway requires a simple omnidirectional antenna to track all the satellites in view, is completely passive (nontransmitting) and the station can be deployed or redeployed with minimum effort, requiring only a surveyed location, making it ideal for a military system. On the contrary, a twoway ranging station requires a complex transmitting equipment, a large directional antenna and, as a consequence, will not be able to simultaneously track multiple satellites, and it is expensive to deploy. Oneway ranging measurements are termed "pseudoranges," since they contain the system clocks contributions, namely the space vehicle (SV) clock and the monitor station (MS) clock in addition to the propagation delay caused by finite propagation velocity vp over the range: where in the last term we have expressed the contribution AtMssv to the pseudorange measurement as the sum of the offsets of the individual clocks with respect to the system time which, for a composite clock solution', must satisfy, in principle, the relationship: I J and the sums are carried on over all SVs and MSs clocks in the system, each properly weighted with weights w, and w,. The fundamental assumption of the oneway ranging technique is the capability to separate the three contributions to the pseudorange measurements, given a sufficient number of measurements. This will yield range observables, used to update the estimate of the orbit, and time offsets observables, to estimate the clock offsets and derive from the latter the clock parameters (phase and frequency offsets and drift) subject to condition (2). However, a sufficient number of independent measurements are required to solve the system unknowns, but additional constraints apply for the term separation to be effective, namely that a sufficient number of simultaneous independent measurements be available. Simultaneity of observations from the same monitor stations of a large number of satellites, as well as simultaneous visibility of multiple stations by an individual satellite, is the key to an effective separation in the solution of the clock contributions from the pseudoranges. Single and doubledifferencing techniques, widely used for data reduction in the geodetic community, will be of help in understanding the underlying physical rationale. When two satellites are simultaneously observed by a single monitor station (Figure l), the first difference of the two pseudoranges drops the common MS clock term from the observable. ' If a Master Clock solution is chosen, all time offsets will be referenced to this single clock (or ensemble). 386
3
4

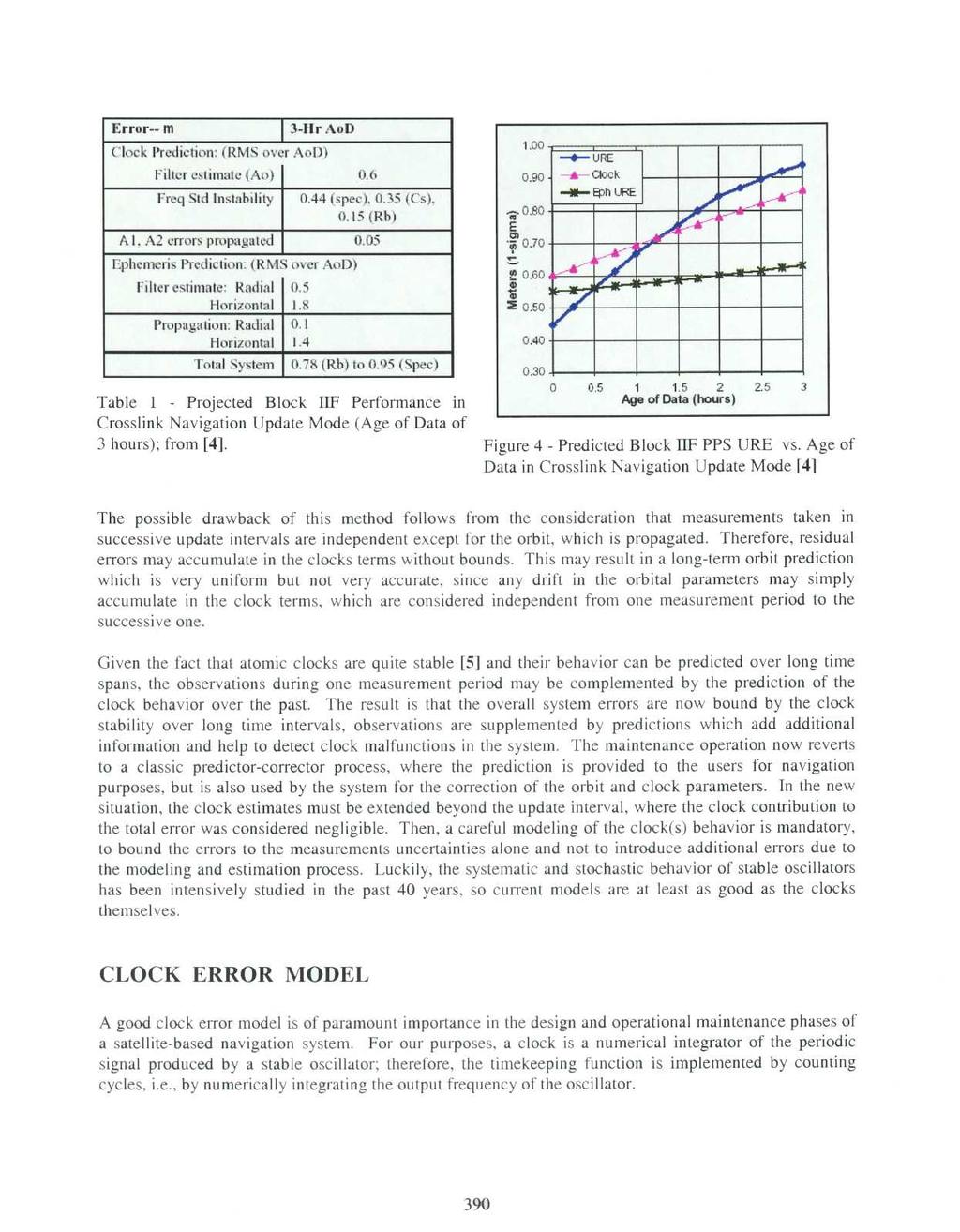
5 errors do not enter the user solution; therefore, their effect on the estimation of the SVs clocks and orbit will affect the final user prediction embedded in the PVT solution. The previous considerations lead to the use of stable oscillators in the ground monitor stations, where stability is to be emphasized in the double areas of: 0 short to mediumterm stability, not to degrade the measurements over the time period used for orbit updating, as well as 0 longterm stability to allow a clean separation of the clocks states, with the aim of improving the navigation system time stability and, overall, its orbital estimation accuracy. ORBIT MAINTENANCE To maintain the navigation accuracy of the system, orbit and time parameters need to be periodically updated, since both tend to drift with time and to increase the related errors. The periodical maintenance is based on frequent updates of the navigation parameters and less frequent tuning of system parameters or hardware calibration or replacement. To insure that system accuracy will stay within the requirement?, the updates of the navigation parameters (orbit elements and clocks) must occur within the allowed limits of the degradation of the parameters themselves. These, in turn, are related to the intrinsic orbit stability (this takes into account gravitational field asymmetries, lunisolar perturbations, planetary perturbations, solar pressure effects, etc.) and to the clock stability. An example of orbit and clock degradation as they appear to the user is shown in Table 1 and in Figure 6 (from [4]). Since the overall accuracy is the sum of these two causes of degradation (orbit perturbations plus clock stability), a stable clock will help to maximize the update period for a given requirement. During each update interval, measurements are collected to generate a new set of parameters to be uploaded at the end of the data collection and processing sequence. The parameters degradation rate allows the setting of a maximum allowable update time interval between updates. Two approaches can be selected. To maintain the navigation accuracy of the system, orbit and time parameters need to be periodically updated, since bdth tend to drift with time and to increase the related errors. The periodical maintenance is based on frequent updates of the navigation parameters and less frequent tuning of system parameters or hardware calibration or replacement. In principle, as far as the clocks are concerned, the basic and simpler approach will be to select an update time interval such that the clock contribution to the total system error will be within specified limits and, therefore, negligible. This approach has the advantage that modeling of the clock is not necessary. Enough measurements are taken during each measurement interval (less or equal to the interval between updates) to solve completely for the orbit parameters and clock offsets. The latter are considered constant over the measurement and prediction intervals, since the clock stability guarantees that the contribution of the clock drift and instability will be negligible (only the frequency offset needs to be estimated). Requirements here and in the following are intended for the normal operation of the system; survivability considerations when normal operations are disrupted will pose additional burdens on clocks longterm stability, but the relevant considerations are limited to military systems in particular phases of their operational life. 389
6
7
8 acceleration, and magnetic field sensitivity, or voltage and load frequency pulling effects. Moreover, the clock integration may be affected too, for instance by delay changes in the electronics induced by temperature effects. Adding these additional environmental effects, the resulting model7 is graphically shown in the block diagram (Figure 5). The noise processes affecting the output frequency of the oscillator dominate the stochastic behavior of the clock. These processes have been intensively studied during the past 40 years, and are characterized by a measurement of frequency instability expressed as spectral density of the phase noise (in the frequency domain) and Allan variance (in the time domain)[6]. Since for a clock we are usually interested in the time domain aspects of frequency instabilities, equation (3) is completed to account for stochastic effects as follows (including environmental effects): + I[@)+ r(t )].dt + (4) t t0 ( f k J (t t o )+ where the upper line in (4)accounts for the systematics, the first term of the second line accounts for the nonstationary noise processes of the oscillator9, the second term for the environmental effects affecting the frequency (the k parameters include temperature sensitivity, magnetic sensitivity, loadpulling effects, relativity, etc.), and the last term the delay (phase) fluctuations induced by temperature in the clock (counter s) electronics. More details on the clock model can be found in [3,6101. In practice, two steps are required to maintain a timing system when the data are acquired in batches and the clock state vector is estimated at regular intervals (as in the case of navigation systems): 1. characterization of the clocks behavior, Le., estimation via measurements of the relevant parameters entering Eq. (4),namely: time offset fractional frequency offset at at to; at some (initial) time to for all purposes; to can be selected as completely arbitrary; frequency drift a2, assuming that this term is constant to avoid a further integration in the model ; frequency stability, expressed as the Allan variance a;(z)over the time interval of interest (in this case the time required to carry on the measurements used to characterize the device) sensitivity parameters Pk of the clock to the various environmental factors. 2. prediction of the clock behavior, i.e. forecasting of the clock error At(t) in time over some time We have not considered randomwalk noise processes, since they generally affect the oscillator at longer integration times than those considered for updating in the normal operations of a navigation system. These can be added to the model if required for simulation purposes. * This is not a very precise model of the time deviation of the clock due to the frequency stability effects, and better predictors can be used when the various noise processes contributions are taken into account separately. 9 v(z) and q(z) are the contributions due to the white frequency and flicker frequency noise processes respectively. lo Oneway pseudorange measurements may be supplemented by twoway data for the estimation of al (and a2 when needed) for the MS clocks see note 4 above. 392
9
10
11
12 D. B. Percival, 1977, Prediction error analysis of atomic frequency standards, in Proceedings of the 31StAnnual Symposium on Frequency Control, 13 June 1977, Fort Monmouth, New Jersey, USA, pp A. Albanese, G. Graglia, and P. Tavella, 2001, Clock error modeling and frequency prediction in the Galileo GNSS2 System, in Proceedings of the 2001 GNSS Symposium, 81 1 May 2001, Seville, Spain. K. Ghassemi and S.C. Fisher, 1997, PerformanceProjections of GPS ZZ, in Proceedings of the 10 International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GPS 1997 Meeting, 1619 September 1997, Kansas City, Missouri, USA, pp P. Rochat and F. Droz, 2001, Presentationon Rb oscillators development for Galileo, ESA 2001 Workshop on European Clocks for Galileo, 4 September 2001, Noordwijk, the Netherlands. D. W. Allan, 1987, Time and Frequency (TimeDomain) Characterization, Estimation and Prediction of Precise Clocks and Oscillators, IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, UFFC34, J. W. Chaffee, 1987, Relatingthe Allan Variance to the DifSusion Coeyfficients of a Linear Stochastic DifSerential Equation Model for Precision Oscillators, IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, UFFC34, P. Tavella and M. Gotta, 2000, Uncertainty and prediction of clock errors in space and ground applications, in Proceedings of the 14 European Frequency and Time Forum (EFTF), 1416 March 2000, Torino, Italy, pp J. Delporte, et al., 2001, Modelisation and extrapolation of time deviation: application to the estimation of the datation stability of a navigation payload, in Proceedings of the 15 European Frequency and Time (EFTF) Forum, 68 March 2001, Neuchitel, Switzerland, pp [lo] G. Busca, 2001, Zmpactof dock behavior on SZSA, ESA 2001 Workshop on European Clocks for Galileo, 4 September 2001, Noordwijk, the Netherlands. [ll]a. Godone, F.Levi, S. Micalizio, and J. Vanier, 2001, The coherent population trapping maser, in Proceedings of the 6 Symposium on Frequency Standards and Metrology, 914 September 2001, St. Andrews, Scotland. [12] E. Detoma, A. Clinton, W. Hanrahan, P. Kushmeider, R. Price, and P. Dachel, 1988, Timing data reduction and processing for the NASA Goddard Laser Tracking Network (GLTN), in Proceedings of the 2 deuropean Frequency and Time Forum (EFTF), 1618 March 1988, Neuchitel, Switzerland, pp [13] A. J. Van Dierendonck and M. Birnbaum, 1976, Time Requirements in the Navstar Global Positioning System (GPS), in Proceedings of the 30 Annual Symposium on Frequency Control, 24 June 1976, Fort Monmouth, New Jersey, USA, pp
13 [14] I. J. Galysh, D.M. Craig, W.G. Reid, and J. Buisson, 1996, Per$omzance analysis of the GPS monitor station timing subsystem enhancement program at the Naval Research Laboratory, in Proceedings of the 28* Annual Precise Time and Time Interval (PTTI) Applications and Planning Meeting, 35 December 1996, Reston, Virginia, USA (U.S. Naval Observatory, Washington, DC), pp
THE LONG-TERM STABILITY OF THE U.S. NAVAL OBSERVATORY S MASERS
 THE LONG-TERM STABILITY OF THE U.S. NAVAL OBSERVATORY S MASERS Demetrios Matsakis, Paul Koppang Time Service Department U.S. Naval Observatory Washington, DC, USA and R. Michael Garvey Symmetricom, Inc.
THE LONG-TERM STABILITY OF THE U.S. NAVAL OBSERVATORY S MASERS Demetrios Matsakis, Paul Koppang Time Service Department U.S. Naval Observatory Washington, DC, USA and R. Michael Garvey Symmetricom, Inc.
APPLICATION OF THE GSF-1 ALGORITHM TO THE NEAR-OPTIMAL TIMESCALE PREDICTION OF THE HYDROGEN MASER
 APPLICATION OF THE GSF-1 ALGORITHM TO THE NEAR-OPTIMAL TIMESCALE PREDICTION OF THE HYDROGEN MASER Laurent-Guy Bernier METAS - Swiss Federal Office of Metrology and Accreditation Lindenweg 50, CH-3003 Bern-Wabern,
APPLICATION OF THE GSF-1 ALGORITHM TO THE NEAR-OPTIMAL TIMESCALE PREDICTION OF THE HYDROGEN MASER Laurent-Guy Bernier METAS - Swiss Federal Office of Metrology and Accreditation Lindenweg 50, CH-3003 Bern-Wabern,
IN-ORBIT PERFORMANCE ASSESSMENT OF GIOVE CLOCKS
 IN-ORBIT PERFORMANCE ASSESSMENT OF GIOVE CLOCKS Pierre Waller European Space Agency ESTEC E-mail: pierre.waller@esa.int F. Gonzalez, J. Hahn, S. Binda, ESA-ESTEC, Noordwijk, The Netherlands R. Piriz, I.
IN-ORBIT PERFORMANCE ASSESSMENT OF GIOVE CLOCKS Pierre Waller European Space Agency ESTEC E-mail: pierre.waller@esa.int F. Gonzalez, J. Hahn, S. Binda, ESA-ESTEC, Noordwijk, The Netherlands R. Piriz, I.
THE LONG-TERM STABILITY OF THE U.S. NAVAL OBSERVATORY S MASERS
 THE LONG-TERM STABILITY OF THE U.S. NAVAL OBSERVATORY S MASERS Demetrios Matsakis, Paul Koppang Time Service Department U.S. Naval Observatory Washington, DC, USA and R. Michael Garvey Symmetricom, Inc.
THE LONG-TERM STABILITY OF THE U.S. NAVAL OBSERVATORY S MASERS Demetrios Matsakis, Paul Koppang Time Service Department U.S. Naval Observatory Washington, DC, USA and R. Michael Garvey Symmetricom, Inc.
Update on the In-orbit Performances of GIOVE Clocks
 Update on the In-orbit Performances of GIOVE Clocks Pierre Waller, Francisco Gonzalez, Stefano Binda, ESA/ESTEC Ilaria Sesia, Patrizia Tavella, INRiM Irene Hidalgo, Guillermo Tobias, GMV Abstract The Galileo
Update on the In-orbit Performances of GIOVE Clocks Pierre Waller, Francisco Gonzalez, Stefano Binda, ESA/ESTEC Ilaria Sesia, Patrizia Tavella, INRiM Irene Hidalgo, Guillermo Tobias, GMV Abstract The Galileo
TIMING ACTIVITIES AT INRIM IN THE FRAME OF THE GALILEO PROJECT
 TIMING ACTIVITIES AT INRIM IN THE FRAME OF THE GALILEO PROJECT I. Sesia, G. Cerretto, and P. Tavella, Istituto Nazionale di Ricerca Metrologica (INRiM), Torino, Italy p.tavella@inrim.it Abstract Since
TIMING ACTIVITIES AT INRIM IN THE FRAME OF THE GALILEO PROJECT I. Sesia, G. Cerretto, and P. Tavella, Istituto Nazionale di Ricerca Metrologica (INRiM), Torino, Italy p.tavella@inrim.it Abstract Since
the experience of INRIM in the Galileo project
 FIFTH MEETING OF THE INTERNATIONAL COMMITTEE ON GLOBAL NAVIGATION SATELLITE SYSTEMS (ICG) Time metrology in navigation systems: the experience of INRIM in the Galileo project Patrizia i Tavella Istituto
FIFTH MEETING OF THE INTERNATIONAL COMMITTEE ON GLOBAL NAVIGATION SATELLITE SYSTEMS (ICG) Time metrology in navigation systems: the experience of INRIM in the Galileo project Patrizia i Tavella Istituto
Research of Satellite and Ground Time Synchronization Based on a New Navigation System
 Research of Satellite and Ground Time Synchronization Based on a New Navigation System Yang Yang, Yufei Yang, Kun Zheng and Yongjun Jia Abstract The new navigation time synchronization method is a breakthrough
Research of Satellite and Ground Time Synchronization Based on a New Navigation System Yang Yang, Yufei Yang, Kun Zheng and Yongjun Jia Abstract The new navigation time synchronization method is a breakthrough
SPACE PASSIVE HYDROGEN MASER PERFORMANCES, LIFETIME DATA, AND GIOVE-B-RELATED TELEMETRIES
 SPACE PASSIVE HYDROGEN MASER PERFORMANCES, LIFETIME DATA, AND GIOVE-B-RELATED TELEMETRIES Marco Belloni Selex Galileo, Italy E-mail: marco.belloni@selexgalileo.com M. Gioia, S. Beretta Selex Galileo, Italy
SPACE PASSIVE HYDROGEN MASER PERFORMANCES, LIFETIME DATA, AND GIOVE-B-RELATED TELEMETRIES Marco Belloni Selex Galileo, Italy E-mail: marco.belloni@selexgalileo.com M. Gioia, S. Beretta Selex Galileo, Italy
STUDIES OF NPL S CLOCK ENSEMBLE ALGORITHM
 43 rd Annual Precise Time and Time Interval (PTTI) Systems and Applications Meeting STUDIES OF NPL S CLOCK ENSEMBLE ALGORITHM Setnam L. Shemar, John A. Davis, and Peter B. Whibberley National Physical
43 rd Annual Precise Time and Time Interval (PTTI) Systems and Applications Meeting STUDIES OF NPL S CLOCK ENSEMBLE ALGORITHM Setnam L. Shemar, John A. Davis, and Peter B. Whibberley National Physical
THE FUTURE MODEL OF TA (TL)
") THE FUTURE MODEL OF TA (TL) Shinn-Yan Lin, Hsin-Ming Peng, Weng-Hung Tseng, Hung-Tien Lin, and Chia-Shu Liao National Standard Time and Frequency Lab., TL, Chunghwa Telecom Co. Ltd. No. 12 Lane 551, Min-Tsu
THE FUTURE MODEL OF TA (TL) Shinn-Yan Lin, Hsin-Ming Peng, Weng-Hung Tseng, Hung-Tien Lin, and Chia-Shu Liao National Standard Time and Frequency Lab., TL, Chunghwa Telecom Co. Ltd. No. 12 Lane 551, Min-Tsu
The Statistics of GPS
 The Statistics of GPS Demetrios Matsakis U.S. Naval Observatory, 3450 Massachusetts Avenue NW, Washington, DC., USA, 20392 ABSTRACT The Global Positioning System (GPS) is an extremely effective satellite-based
The Statistics of GPS Demetrios Matsakis U.S. Naval Observatory, 3450 Massachusetts Avenue NW, Washington, DC., USA, 20392 ABSTRACT The Global Positioning System (GPS) is an extremely effective satellite-based
A NEW SYSTEM FOR THE GENERATION OF UTC(CH)
") A NEW SYSTEM FOR THE GENERATION OF UTC(CH) L.G. Bernier and G. Schaller METAS Swiss Federal Office of Metrology Lindenweg 50, Bern-Wabern, CH-3003, Switzerland laurent-guy.bernier@metas.ch Abstract A new
A NEW SYSTEM FOR THE GENERATION OF UTC(CH) L.G. Bernier and G. Schaller METAS Swiss Federal Office of Metrology Lindenweg 50, Bern-Wabern, CH-3003, Switzerland laurent-guy.bernier@metas.ch Abstract A new
Time and Frequency Activities at the JHU Applied Physics Laboratory
 Time and Frequency Activities at the JHU Applied Physics Laboratory Mihran Miranian, Gregory L. Weaver, Jeffrey F. Garstecki, and Richard A. Dragonette Johns Hopkins University Applied Physics Laboratory,
Time and Frequency Activities at the JHU Applied Physics Laboratory Mihran Miranian, Gregory L. Weaver, Jeffrey F. Garstecki, and Richard A. Dragonette Johns Hopkins University Applied Physics Laboratory,
AN ALGORITHM FOR THE ITALIAN ATOMIC TIME SCALE
 AN ALGORITHM FOR THE ITALIAN ATOMIC TIME SCALE F. Cordara, G. Vizio, P. Tavella, V. Pettiti Istituto Elettrotecnico Nazionale Galileo Ferraris Corso Massimo d9azeglio 42 10125 Torino - Italy Abstract During
AN ALGORITHM FOR THE ITALIAN ATOMIC TIME SCALE F. Cordara, G. Vizio, P. Tavella, V. Pettiti Istituto Elettrotecnico Nazionale Galileo Ferraris Corso Massimo d9azeglio 42 10125 Torino - Italy Abstract During
DEVELOPMENT OF NEW RB CLOCKS IN OBSERVATOIRE DE NEUCHÂTEL
 DEVELOPMENT OF NEW RB CLOCKS IN OBSERVATOIRE DE NEUCHÂTEL C. Affolderbach and G. Mileti Observatoire Cantonal de Neuchâtel Rue de l Observatoire 58, 2000 Neuchâtel, Switzerland Tel: ++41-32-8898822; Fax:
DEVELOPMENT OF NEW RB CLOCKS IN OBSERVATOIRE DE NEUCHÂTEL C. Affolderbach and G. Mileti Observatoire Cantonal de Neuchâtel Rue de l Observatoire 58, 2000 Neuchâtel, Switzerland Tel: ++41-32-8898822; Fax:
GNSS space clocks assessment based on different IGS and MGEX data. Tung Thanh Thai, Giovanna Signorile, Ilaria Sesia
 GNSS space clocks assessment based on different IGS and MGEX data Tung Thanh Thai, Giovanna Signorile, Ilaria Sesia 1 INRIM and GNSS Time Metrology INRIM is involved in characterization of atomic clocks
GNSS space clocks assessment based on different IGS and MGEX data Tung Thanh Thai, Giovanna Signorile, Ilaria Sesia 1 INRIM and GNSS Time Metrology INRIM is involved in characterization of atomic clocks
A KALMAN FILTER CLOCK ALGORITHM FOR USE IN THE PRESENCE OF FLICKER FREQUENCY MODULATION NOISE
 A KALMAN FILTER CLOCK ALGORITHM FOR USE IN THE PRESENCE OF FLICKER FREQUENCY MODULATION NOISE J. A. Davis, C. A. Greenhall *, and P. W. Stacey National Physical Laboratory Queens Road, Teddington, Middlesex,
A KALMAN FILTER CLOCK ALGORITHM FOR USE IN THE PRESENCE OF FLICKER FREQUENCY MODULATION NOISE J. A. Davis, C. A. Greenhall *, and P. W. Stacey National Physical Laboratory Queens Road, Teddington, Middlesex,
Research Article Time Synchronization and Performance of BeiDou Satellite Clocks in Orbit
 Navigation and Observation Volume 213, Article ID 37145, 5 pages http://dx.doi.org/1.1155/213/37145 Research Article Time Synchronization and Performance of BeiDou Satellite Clocks in Orbit Han Chunhao,
Navigation and Observation Volume 213, Article ID 37145, 5 pages http://dx.doi.org/1.1155/213/37145 Research Article Time Synchronization and Performance of BeiDou Satellite Clocks in Orbit Han Chunhao,
UPDATE ON TIME AND FREQUENCY ACTIVITIES AT PTB
 33rdAnnual Precise Time and Time Interval (PZTZ) Meeting UPDATE ON TIME AND FREQUENCY ACTIVITIES AT PTB Peter Hetzel and Andreas Bauch Physikalisch-TechnischeBundesanstalt,Bundesallee 1, D-38116 Braunschweig,
33rdAnnual Precise Time and Time Interval (PZTZ) Meeting UPDATE ON TIME AND FREQUENCY ACTIVITIES AT PTB Peter Hetzel and Andreas Bauch Physikalisch-TechnischeBundesanstalt,Bundesallee 1, D-38116 Braunschweig,
OPTIMAL TIME TRANSFER
 OPTIMAL TIME TRANSFER James R. Wright and James Woodburn Analytical Graphics, Inc. 220 Valley Creek Blvd, Exton, PA 19341, USA Abstract We have designed an optimal time transfer algorithm using GPS carrier-phase
OPTIMAL TIME TRANSFER James R. Wright and James Woodburn Analytical Graphics, Inc. 220 Valley Creek Blvd, Exton, PA 19341, USA Abstract We have designed an optimal time transfer algorithm using GPS carrier-phase
SHORT-TERM CHARACTERIZATION OF GPS- DISCIPLINED OSCILLATORS AND FIELD TRIAL FOR FREQUENCY OF ITALIAN CALIBRATION CENTERS
 30th Annz~al Precise Time and Time Interval (PTTI) Meeting SHORTTERM CHARACTERIZATION OF GPS DISCIPLINED OSCILLATORS AND FIELD TRIAL FOR FREQUENCY OF ITALIAN CALIBRATION CENTERS V. Pettiti, F. Cordara
30th Annz~al Precise Time and Time Interval (PTTI) Meeting SHORTTERM CHARACTERIZATION OF GPS DISCIPLINED OSCILLATORS AND FIELD TRIAL FOR FREQUENCY OF ITALIAN CALIBRATION CENTERS V. Pettiti, F. Cordara
DEGREES OF FREEDOM AND THREE-CORNERED HATS
 33rd Annual Precise Time and Time Interval (PTTI) Meeting DEGREES OF FREEDOM AND THREE-CORNERED HATS Christopher R. Ekstrom and Paul A. Koppang U.S. Naval Observatory, Washington, D.C. Abstract The three-cornered
33rd Annual Precise Time and Time Interval (PTTI) Meeting DEGREES OF FREEDOM AND THREE-CORNERED HATS Christopher R. Ekstrom and Paul A. Koppang U.S. Naval Observatory, Washington, D.C. Abstract The three-cornered
A KALMAN FILTER FOR ATOMIC CLOCKS AND TIMESCALES
 33rdAnnual Precise Time and Time Interval (PTTI) Meeting A KALMAN FILTER FOR ATOMIC CLOCKS AND TIMESCALES Lee A. Breakiron U.S. Naval Observatory Washington, DC 2392542,USA Abstract In a test of whether
33rdAnnual Precise Time and Time Interval (PTTI) Meeting A KALMAN FILTER FOR ATOMIC CLOCKS AND TIMESCALES Lee A. Breakiron U.S. Naval Observatory Washington, DC 2392542,USA Abstract In a test of whether
An Ensemble of Atomic Fountains
 An Ensemble of Atomic Fountains Steven Peil, Scott Crane, James Hanssen, Thomas B. Swanson and Christopher R. Ekstrom Clock Development Division United States Naval Observatory Washington, DC 39 Abstract
An Ensemble of Atomic Fountains Steven Peil, Scott Crane, James Hanssen, Thomas B. Swanson and Christopher R. Ekstrom Clock Development Division United States Naval Observatory Washington, DC 39 Abstract
TOWARDS ROBUST LOCALIZATION OF RTK-GPS TOPOGRAPHIC SURVEYS 23
 TOWARDS ROBUST LOCALIZATION OF RTK-GPS TOPOGRAPHIC SURVEYS Jerry W. Nave, North Carolina A&T University; Tarig A. Ali, American University of Sharjah Abstract Localization is performed to fit the observed
TOWARDS ROBUST LOCALIZATION OF RTK-GPS TOPOGRAPHIC SURVEYS Jerry W. Nave, North Carolina A&T University; Tarig A. Ali, American University of Sharjah Abstract Localization is performed to fit the observed
Uncertainties of drift coefficients and extrapolation errors: Application to clock error prediction
 Vernotte et al - E 1319 - Final Version - Metrologia - February 1, 21 1 Uncertainties of drift coefficients and extrapolation errors: Application to clock error prediction F Vernotte 1, J Delporte 2, M
Vernotte et al - E 1319 - Final Version - Metrologia - February 1, 21 1 Uncertainties of drift coefficients and extrapolation errors: Application to clock error prediction F Vernotte 1, J Delporte 2, M
GALILEO CONSTELLATION: EVALUATION OF STATION KEEPING STRATEGIES.
 GALILEO CONSTELLATION: EVALUATION OF STATION KEEPING STRATEGIES Daniel Navarro-Reyes (1), Anna Notarantonio (), Giacomo Taini (3) (1) ESA, ESTEC Keplerlaan 1 Noordwijk The Netherlands, +31 71 5658313,
GALILEO CONSTELLATION: EVALUATION OF STATION KEEPING STRATEGIES Daniel Navarro-Reyes (1), Anna Notarantonio (), Giacomo Taini (3) (1) ESA, ESTEC Keplerlaan 1 Noordwijk The Netherlands, +31 71 5658313,
The ACES Mission. Fundamental Physics Tests with Cold Atom Clocks in Space. L. Cacciapuoti European Space Agency
 The ACES Mission Fundamental Physics Tests with Cold Atom Clocks in Space L. Cacciapuoti European Space Agency La Thuile, 20-27 March 2011 Gravitational Waves and Experimental Gravity 1 ACES Mission Concept
The ACES Mission Fundamental Physics Tests with Cold Atom Clocks in Space L. Cacciapuoti European Space Agency La Thuile, 20-27 March 2011 Gravitational Waves and Experimental Gravity 1 ACES Mission Concept
A NEW REALIZATION OF TERRESTRIAL TIME
 A NEW REALIZATION OF TERRESTRIAL TIME G. Petit BIPM, Pavillon de Breteuil, 92312 Sèvres Cedex, France E-mail: gpetit@bipm.org Abstract Terrestrial Time TT is a time coordinate in a geocentric reference
A NEW REALIZATION OF TERRESTRIAL TIME G. Petit BIPM, Pavillon de Breteuil, 92312 Sèvres Cedex, France E-mail: gpetit@bipm.org Abstract Terrestrial Time TT is a time coordinate in a geocentric reference
CALIBRATING GPS WITH TWSTFT FOR ACCURATE TIME TRANSFER
 CALIBRATING WITH TWSTFT FOR ACCURATE TIME TRANSFER Z. Jiang 1 and A. Niessner 2 1 Bureau International des Poids et Mesures (BIPM) Pavillon de Breteuil F-92312 Sèvres Cedex, France zjiang@bipm.org 2 Bundesamt
CALIBRATING WITH TWSTFT FOR ACCURATE TIME TRANSFER Z. Jiang 1 and A. Niessner 2 1 Bureau International des Poids et Mesures (BIPM) Pavillon de Breteuil F-92312 Sèvres Cedex, France zjiang@bipm.org 2 Bundesamt
LONG-TERM STABILITY OF REMOTE CLOCK COMPARISONS WITH IGS CLOCK PRODUCTS
 LONG-TERM STABILITY OF REMOTE CLOCK COMPARISONS WITH IGS CLOCK PRODUCTS Victor Zhang, Thomas E. Parker, and Marc A. Weiss Time and Frequency Division National Institute of Standards and Technology Boulder,
LONG-TERM STABILITY OF REMOTE CLOCK COMPARISONS WITH IGS CLOCK PRODUCTS Victor Zhang, Thomas E. Parker, and Marc A. Weiss Time and Frequency Division National Institute of Standards and Technology Boulder,
Lee A. Breakiron U.S. Naval Observatory Washington, DC ABSTRACT
 A COMPARATIVE STUDY OF CLOCK RATE AND DRIFT ESTIMATION Lee A. Breakiron U.S. Naval Observatory Washington, DC 20392 ABSTRACT Five different methods of drift determination and four different methods of
A COMPARATIVE STUDY OF CLOCK RATE AND DRIFT ESTIMATION Lee A. Breakiron U.S. Naval Observatory Washington, DC 20392 ABSTRACT Five different methods of drift determination and four different methods of
NGA GNSS Division Precise Ephemeris Parameters
 NGA GNSS Division Precise Ephemeris Parameters Precise Ephemeris Units. Earth-centered, Earth-fixed Coordinate system Position Velocity GPS time Trajectory interval Standard Trajectory Optional Trajectory
NGA GNSS Division Precise Ephemeris Parameters Precise Ephemeris Units. Earth-centered, Earth-fixed Coordinate system Position Velocity GPS time Trajectory interval Standard Trajectory Optional Trajectory
Progress Report on the WLRS: Getting ready for GGOS, LLR and Time Transfer
 13-0219 Progress Report on the WLRS: Getting ready for GGOS, LLR and Time Transfer G. Herold (1), J. Eckl (1), M. Mühlbauer (1), A. Leidig (1), J. Kodet (2), U. Schreiber (2) (1) Geodetic Observatory Wettzell,
13-0219 Progress Report on the WLRS: Getting ready for GGOS, LLR and Time Transfer G. Herold (1), J. Eckl (1), M. Mühlbauer (1), A. Leidig (1), J. Kodet (2), U. Schreiber (2) (1) Geodetic Observatory Wettzell,
Week 02. Assist. Prof. Dr. Himmet KARAMAN
 Week 02 Assist. Prof. Dr. Himmet KARAMAN Contents Satellite Orbits Ephemerides GPS Review Accuracy & Usage Limitation Reference Systems GPS Services GPS Segments Satellite Positioning 2 Satellite Orbits
Week 02 Assist. Prof. Dr. Himmet KARAMAN Contents Satellite Orbits Ephemerides GPS Review Accuracy & Usage Limitation Reference Systems GPS Services GPS Segments Satellite Positioning 2 Satellite Orbits
GLOBAL POSITIONING SYSTEM CONSTELLATION CLOCK PERFORMANCE
 GLOBAL POSITIONING SYSTEM CONSTELLATION CLOCK PERFORMANCE Jay Oaks, Ken Senior, Marie M. Largay U.S. Naval Research Laboratory Wilson G. Reid, Hugh Warren SFA, Inc. James A. Buisson Antoine Enterprises,
GLOBAL POSITIONING SYSTEM CONSTELLATION CLOCK PERFORMANCE Jay Oaks, Ken Senior, Marie M. Largay U.S. Naval Research Laboratory Wilson G. Reid, Hugh Warren SFA, Inc. James A. Buisson Antoine Enterprises,
Dr. Jean Lautier-Gaud October, 14 th 2016
 New generation of operational atomic clock: what perspectives for radio-astronomy & VLBI? Dr. Jean Lautier-Gaud October, 14 th 2016 Courtesy of Noel Dimarcq, SYRTE Content 1. Why is Muquans here? 2. What
New generation of operational atomic clock: what perspectives for radio-astronomy & VLBI? Dr. Jean Lautier-Gaud October, 14 th 2016 Courtesy of Noel Dimarcq, SYRTE Content 1. Why is Muquans here? 2. What
AN EVALUATION OF VARIOUS SPACE CLOCKS FOR GPS IIF
 33rdAnnual Precise Time and Time Interval ( P P I )Meeting AN EVALUATION OF VARIOUS SPACE CLOCKS FOR GPS IIF V. Nuth, W. A. Feess, and C. Wu The Aerospace Corporation 2350 E. El Segundo Blvd., M4/962,
33rdAnnual Precise Time and Time Interval ( P P I )Meeting AN EVALUATION OF VARIOUS SPACE CLOCKS FOR GPS IIF V. Nuth, W. A. Feess, and C. Wu The Aerospace Corporation 2350 E. El Segundo Blvd., M4/962,
GNSS: Global Navigation Satellite Systems
 GNSS: Global Navigation Satellite Systems Global: today the American GPS (Global Positioning Service), http://gps.losangeles.af.mil/index.html the Russian GLONASS, http://www.glonass-center.ru/frame_e.html
GNSS: Global Navigation Satellite Systems Global: today the American GPS (Global Positioning Service), http://gps.losangeles.af.mil/index.html the Russian GLONASS, http://www.glonass-center.ru/frame_e.html
PROTOTYPE OF THE DLR OPERATIONAL COMPOSITE CLOCK: METHODS AND TEST CASES
 PROTOTYPE OF THE DLR OPERATIONAL COMPOSITE CLOCK: METHODS AND TEST CASES Matthias Suess and Jens Hammesfahr E-mail: Matthias.suess@dlr.de German Aerospace Centre (DLR) Oberpfaffenhofen, Germany Abstract
PROTOTYPE OF THE DLR OPERATIONAL COMPOSITE CLOCK: METHODS AND TEST CASES Matthias Suess and Jens Hammesfahr E-mail: Matthias.suess@dlr.de German Aerospace Centre (DLR) Oberpfaffenhofen, Germany Abstract
Timing Applications and User Equipment R. Michael Garvey. Time and Frequency Services with Galileo Workshop. 5-6 December 2005
 Timing Applications and User Equipment R. Michael Garvey Time and Frequency Services with Galileo Workshop 5-6 December 2005 Outline Atomic Clock Technologies Atomic Clock Vendors Rubidium Gas Cell Cesium
Timing Applications and User Equipment R. Michael Garvey Time and Frequency Services with Galileo Workshop 5-6 December 2005 Outline Atomic Clock Technologies Atomic Clock Vendors Rubidium Gas Cell Cesium
Accelerometers for GNSS Orbit Determination
 Accelerometers for GNSS Orbit Determination Urs Hugentobler, Anja Schlicht Technische Universität München 5th International Colloquium on Scientific and Fundamental Aspects of the Galileo Programme October
Accelerometers for GNSS Orbit Determination Urs Hugentobler, Anja Schlicht Technische Universität München 5th International Colloquium on Scientific and Fundamental Aspects of the Galileo Programme October
White Rabbit-Based Time Distribution at NIST
 White Rabbit-Based Time Distribution at NIST J. Savory, J. Sherman, and S. Romisch Time and Frequency Division National Institute of Standards and Technology Boulder, CO 80305 joshua.savory@nist.gov Abstract
White Rabbit-Based Time Distribution at NIST J. Savory, J. Sherman, and S. Romisch Time and Frequency Division National Institute of Standards and Technology Boulder, CO 80305 joshua.savory@nist.gov Abstract
ISTITUTO ELETTROTECNICO NAZIONALE G.FERRARIS ITALY. Correction (x10-15 )
") REPORT TO THE 16 TH SESSION OF CCTF ISTITUTO ELETTROTECNICO NAZIONALE G.FERRARIS ITALY 1 Atomic Frequency Standard Cesium fountain The cesium fountain primary frequency standard denominated IEN CsF1 was
REPORT TO THE 16 TH SESSION OF CCTF ISTITUTO ELETTROTECNICO NAZIONALE G.FERRARIS ITALY 1 Atomic Frequency Standard Cesium fountain The cesium fountain primary frequency standard denominated IEN CsF1 was
Workshop on GNSS Data Application to Low Latitude Ionospheric Research May Fundamentals of Satellite Navigation
 2458-6 Workshop on GNSS Data Application to Low Latitude Ionospheric Research 6-17 May 2013 Fundamentals of Satellite Navigation HEGARTY Christopher The MITRE Corporation 202 Burlington Rd. / Rte 62 Bedford
2458-6 Workshop on GNSS Data Application to Low Latitude Ionospheric Research 6-17 May 2013 Fundamentals of Satellite Navigation HEGARTY Christopher The MITRE Corporation 202 Burlington Rd. / Rte 62 Bedford
PROJECT GALILEO, AN OVERVIEW
 33'* Annual Precise Time and Time Interval (PTTl) Meeting PROJECT GALILEO, AN OVERVIEW Sigfrido Leschiutta*" Patrizia Tavella" *Politecnico di Torino, Dip. Elettronica Corso Duca degli Abruzzi 24, Torino,
33'* Annual Precise Time and Time Interval (PTTl) Meeting PROJECT GALILEO, AN OVERVIEW Sigfrido Leschiutta*" Patrizia Tavella" *Politecnico di Torino, Dip. Elettronica Corso Duca degli Abruzzi 24, Torino,
AN ANOMALY CLOCK DETECTION ALGORITHM FOR A ROBUST CLOCK ENSEMBLE
 4 st Annual Precise Time and Time Interval (PTTI) Meeting AN ANOMALY CLOCK DETECTION ALGORITHM FOR A ROBUST CLOCK ENSEMBLE Qinghua Wang and Pascal Rochat SpectraTime Vauseyon 9, Neuchâtel, Switzerland
4 st Annual Precise Time and Time Interval (PTTI) Meeting AN ANOMALY CLOCK DETECTION ALGORITHM FOR A ROBUST CLOCK ENSEMBLE Qinghua Wang and Pascal Rochat SpectraTime Vauseyon 9, Neuchâtel, Switzerland
AN UPDATE ON PTB S ACTIVITIES IN TIME AND FREQUENCY
 AN UPDATE ON PTB S ACTIVITIES IN TIME AND FREQUENCY D. Piester, A. Bauch, J. Becker, and T. Polewka Physikalisch-Technische Bundesanstalt, Braunschweig, Germany Abstract Recent activities in the field
AN UPDATE ON PTB S ACTIVITIES IN TIME AND FREQUENCY D. Piester, A. Bauch, J. Becker, and T. Polewka Physikalisch-Technische Bundesanstalt, Braunschweig, Germany Abstract Recent activities in the field
MTIE AND TDEV ANALYSIS OF UNEVENLY SPACED TIME SERIES DATA AND ITS APPLICATION TO TELECOMMUNICATIONS SYNCHRONIZATION MEASUREMENTS
 MTIE AND TDEV ANALYSIS OF UNEVENLY SPACED TIME SERIES DATA AND ITS APPLICATION TO TELECOMMUNICATIONS SYNCHRONIZATION MEASUREMENTS Mingfu Li, Hsin-Min Peng, and Chia-Shu Liao Telecommunication Labs., Chunghwa
MTIE AND TDEV ANALYSIS OF UNEVENLY SPACED TIME SERIES DATA AND ITS APPLICATION TO TELECOMMUNICATIONS SYNCHRONIZATION MEASUREMENTS Mingfu Li, Hsin-Min Peng, and Chia-Shu Liao Telecommunication Labs., Chunghwa
RF System Calibration Using Beam Orbits at LEP
 EUROPEAN ORGANIZATION FOR NUCLEAR RESEARCH CERN SL DIVISION CERN-SL-22-28 OP LEP Energy Working Group 2/1 RF System Calibration Using Beam Orbits at LEP J. Wenninger Abstract The target for beam energy
EUROPEAN ORGANIZATION FOR NUCLEAR RESEARCH CERN SL DIVISION CERN-SL-22-28 OP LEP Energy Working Group 2/1 RF System Calibration Using Beam Orbits at LEP J. Wenninger Abstract The target for beam energy
The Development of a New Kalman-Filter Time Scale at NIST
 The Development of a ew Kalman-Filter Time Scale at IST Jian Yao, Thomas Parker, and Judah Levine Time and Frequency Division, ational Institute of Standards and Technology ABSTRACT We report on a preliminary
The Development of a ew Kalman-Filter Time Scale at IST Jian Yao, Thomas Parker, and Judah Levine Time and Frequency Division, ational Institute of Standards and Technology ABSTRACT We report on a preliminary
ORBIT DETERMINATION THROUGH GLOBAL POSITIONING SYSTEMS: A LITERATURE SURVEY
 ORBIT DETERMINATION THROUGH GLOBAL POSITIONING SYSTEMS: A LITERATURE SURVEY ABDUL MANARVI, MASTER S STUDENT DEPARTMENT OF AEROSPACE ENGINEERING EMBRY-RIDDLE AERONAUTICAL UNIVERSITY DAYTONA BEACH, FL, U.S.A
ORBIT DETERMINATION THROUGH GLOBAL POSITIONING SYSTEMS: A LITERATURE SURVEY ABDUL MANARVI, MASTER S STUDENT DEPARTMENT OF AEROSPACE ENGINEERING EMBRY-RIDDLE AERONAUTICAL UNIVERSITY DAYTONA BEACH, FL, U.S.A
A NEW REALIZATION OF TERRESTRIAL TIME
 CCTF/04-17 A NEW REALIZATION OF TERRESTRIAL TIME G. Petit BIPM, Pavillon de Breteuil, 92312 Sèvres Cedex France- e-mail: gpetit@bipm.org ABSTRACT Terrestrial Time TT is a time coordinate in a geocentric
CCTF/04-17 A NEW REALIZATION OF TERRESTRIAL TIME G. Petit BIPM, Pavillon de Breteuil, 92312 Sèvres Cedex France- e-mail: gpetit@bipm.org ABSTRACT Terrestrial Time TT is a time coordinate in a geocentric
STUDIES OF THE UNBIASED FIR FILTER FOR THE TIME ERROR MODEL IN APPLICATIONS TO GPS-BASED TIMEKEEPING 1
 STUDIES OF THE UNBIASED FIR FILTER FOR THE TIME ERROR MODEL IN APPLICATIONS TO GPS-BASED TIMEKEEPING 1 Yu. Shmaliy and O. Ibarra-Manzano Guanajuato University, FIMEE, Mexico E-mail: shmaliy@salamanca.ugto.mx
STUDIES OF THE UNBIASED FIR FILTER FOR THE TIME ERROR MODEL IN APPLICATIONS TO GPS-BASED TIMEKEEPING 1 Yu. Shmaliy and O. Ibarra-Manzano Guanajuato University, FIMEE, Mexico E-mail: shmaliy@salamanca.ugto.mx
SYMMETRICOM TIME-SCALE SYSTEM
 SYMMETRICOM TIME-SCALE SYSTEM Timothy Erickson, Venkatesan Ramakrishnan, Samuel R. Stein 3 Symmetricom, Inc., Boulder, CO, USA, tierickson@symmetricom.com Symmetricom, Inc., Santa Rosa, CA, USA, vramakrishnan@symmetricom.com
SYMMETRICOM TIME-SCALE SYSTEM Timothy Erickson, Venkatesan Ramakrishnan, Samuel R. Stein 3 Symmetricom, Inc., Boulder, CO, USA, tierickson@symmetricom.com Symmetricom, Inc., Santa Rosa, CA, USA, vramakrishnan@symmetricom.com
GGSP: Realisation of the Galileo Terrestrial Reference Frame
 Galileo Geodetic Service Provider Prototype GGSP: Realisation of the Galileo Terrestrial Reference Frame Wolfgang Söhne, Johannes Ihde Federal Agency for Cartography and Geodesy Gerd Gendt, Markus Rothacher
Galileo Geodetic Service Provider Prototype GGSP: Realisation of the Galileo Terrestrial Reference Frame Wolfgang Söhne, Johannes Ihde Federal Agency for Cartography and Geodesy Gerd Gendt, Markus Rothacher
Global Navigation Satellite Systems
 Global Navigation Satellite Systems GPS GLONASS Galileo BeiDou I I (COMPASS)? How Does a GNSS Work? Based on principle of triangulation Also called satellite ranging Signal travels at constant speed (3.0x10
Global Navigation Satellite Systems GPS GLONASS Galileo BeiDou I I (COMPASS)? How Does a GNSS Work? Based on principle of triangulation Also called satellite ranging Signal travels at constant speed (3.0x10
THE RANGE COVERED BY A CLOCK ERROR IN THE CASE OF WHITE FM
 ! 90th Annual Precise Time and Time Interval (PTTI) Meeting THE RANGE COVERED BY A CLOCK ERROR IN THE CASE OF WHITE FM Patrizia Tavella* and Daniela MeoO JCIstituto Elettrotecnico Nazionale G. Ferraris
! 90th Annual Precise Time and Time Interval (PTTI) Meeting THE RANGE COVERED BY A CLOCK ERROR IN THE CASE OF WHITE FM Patrizia Tavella* and Daniela MeoO JCIstituto Elettrotecnico Nazionale G. Ferraris
Possible advantages of equipping GNSS satellites with on-board accelerometers
 Possible advantages of equipping GNSS satellites with on-board accelerometers - a way to get profits - Maciej Kalarus (1) Krzysztof Sośnica (2) Agata Wielgosz (1) Tomasz Liwosz (3) Janusz B. Zielioski
Possible advantages of equipping GNSS satellites with on-board accelerometers - a way to get profits - Maciej Kalarus (1) Krzysztof Sośnica (2) Agata Wielgosz (1) Tomasz Liwosz (3) Janusz B. Zielioski
Discrete Simulation of Power Law Noise
 Discrete Simulation of Power Law Noise Neil Ashby 1,2 1 University of Colorado, Boulder, CO 80309-0390 USA 2 National Institute of Standards and Technology, Boulder, CO 80305 USA ashby@boulder.nist.gov
Discrete Simulation of Power Law Noise Neil Ashby 1,2 1 University of Colorado, Boulder, CO 80309-0390 USA 2 National Institute of Standards and Technology, Boulder, CO 80305 USA ashby@boulder.nist.gov
Time and Frequency metrology: e-infrastractures for Science and Society
 Time and Frequency metrology: e-infrastractures for Science and Society Davide Calonico Optics Division Istituto Nazionale Di Ricerca Metrologica d.calonico@inrim.it Time and Frequency Metrology: who cares?
Time and Frequency metrology: e-infrastractures for Science and Society Davide Calonico Optics Division Istituto Nazionale Di Ricerca Metrologica d.calonico@inrim.it Time and Frequency Metrology: who cares?
Principles of the Global Positioning System Lecture 14
 12.540 Principles of the Global Positioning System Lecture 14 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 Propagation Medium Propagation: Signal propagation from satellite to receiver Light-time
12.540 Principles of the Global Positioning System Lecture 14 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 Propagation Medium Propagation: Signal propagation from satellite to receiver Light-time
Observing the Behaviour of High Stable Galileo Satellite Clocks and Exploring Potential Associated Benefits
 Observing the Behaviour of High Stable Galileo Satellite Clocks and Exploring Potential Associated Benefits Navarro Madrid, P. F., Roldán Gómez, P. J., Calle Calle, J. D., Rodríguez Pérez, I., Cela López,
Observing the Behaviour of High Stable Galileo Satellite Clocks and Exploring Potential Associated Benefits Navarro Madrid, P. F., Roldán Gómez, P. J., Calle Calle, J. D., Rodríguez Pérez, I., Cela López,
INTERNATIONAL SLR SERVICE
 ARTIFICIAL SATELLITES, Vol. 46, No. 4 2011 DOI: 10.2478/v10018-012-0004-z INTERNATIONAL SLR SERVICE Stanisław Schillak Space Research Centre, Polish Academy of Sciences Astrogeodynamic Observatory, Borowiec
ARTIFICIAL SATELLITES, Vol. 46, No. 4 2011 DOI: 10.2478/v10018-012-0004-z INTERNATIONAL SLR SERVICE Stanisław Schillak Space Research Centre, Polish Academy of Sciences Astrogeodynamic Observatory, Borowiec
Winds on Titan: First results from the Huygens Doppler Wind Experiment
 1 Winds on Titan: First results from the Huygens Doppler Wind Experiment Supplementary Discussion. It was realized during the DWE design phase that Earth-based Doppler measurements could be combined with
1 Winds on Titan: First results from the Huygens Doppler Wind Experiment Supplementary Discussion. It was realized during the DWE design phase that Earth-based Doppler measurements could be combined with
THE GPS TOOLKIT: OPEN SOURCE CLOCK TOOLS
 THE GPS TOOLKIT: OPEN SOURCE CLOCK TOOLS Timothy J. H. Craddock, Richard John Broderick, Colin P. Petersen, and Alex Hu Applied Research Laboratories: The University of Texas at Austin Space and Geophysics
THE GPS TOOLKIT: OPEN SOURCE CLOCK TOOLS Timothy J. H. Craddock, Richard John Broderick, Colin P. Petersen, and Alex Hu Applied Research Laboratories: The University of Texas at Austin Space and Geophysics
Towards an improved ILRS TRF contribution
 Towards an improved ILRS TRF contribution Erricos C. Pavlis ILRS Analysis Coordinator JCET/ & NASA Goddard IERS Workshop on Conventions 2007 20-21 Sept. 2007, Sèvres, France Overview The ILRS Network Geometry
Towards an improved ILRS TRF contribution Erricos C. Pavlis ILRS Analysis Coordinator JCET/ & NASA Goddard IERS Workshop on Conventions 2007 20-21 Sept. 2007, Sèvres, France Overview The ILRS Network Geometry
Advanced Electronic Communication Systems. Lecture 4. Satellite Orbits (2) Dr.Eng. Basem ElHalawany
 Dr.Eng. Basem ElHalawany") Advanced Electronic Communication Systems Lecture 4 Satellite Orbits (2) Dr.Eng. Basem ElHalawany Orbital (nonsynchronous) Satellites (cont.) Posigrade orbit or Prograde: If the satellite is orbiting in
Advanced Electronic Communication Systems Lecture 4 Satellite Orbits (2) Dr.Eng. Basem ElHalawany Orbital (nonsynchronous) Satellites (cont.) Posigrade orbit or Prograde: If the satellite is orbiting in
Orbit Representation
 7.1 Fundamentals 223 For this purpose, code-pseudorange and carrier observations are made of all visible satellites at all monitor stations. The data are corrected for ionospheric and tropospheric delays,
7.1 Fundamentals 223 For this purpose, code-pseudorange and carrier observations are made of all visible satellites at all monitor stations. The data are corrected for ionospheric and tropospheric delays,
NPL Time and Frequency Section: NPL S CONTRIBUTION TO TUGGS
 NPL Time & Frequency NPL Time and Frequency Section: NPL S CONTRIBUTION TO TUGGS J A Davis, P W Stacey, R Hlavac, and P B Whibberley. Date: 21st April 2004 THALES UK-BASED GNSS GROUND SEGMENT (TUGGS) Aim
NPL Time & Frequency NPL Time and Frequency Section: NPL S CONTRIBUTION TO TUGGS J A Davis, P W Stacey, R Hlavac, and P B Whibberley. Date: 21st April 2004 THALES UK-BASED GNSS GROUND SEGMENT (TUGGS) Aim
A KALMAN FILTER FOR ATOMIC CLOCKS AND TIMESCALES
 33rdAnnual Precise Time and Time Interval (PTTI) Meeting A KALMAN FILTER FOR ATOMIC CLOCKS AND TIMESCALES Lee A. Breakiron U.S. Naval Observatory Washington, DC 2392-542,USA Abstract In a test of whether
33rdAnnual Precise Time and Time Interval (PTTI) Meeting A KALMAN FILTER FOR ATOMIC CLOCKS AND TIMESCALES Lee A. Breakiron U.S. Naval Observatory Washington, DC 2392-542,USA Abstract In a test of whether
ULTRA-STABLE OSCILLATORS FOR PLANETARY ENTRY PROBES
 ULTRA-STABLE OSCILLATORS FOR PLANETARY ENTRY PROBES S.W. Asmar (1), D.H. Atkinson (2), M.K. Bird (3), G.E. Wood (4) (1) Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109,
ULTRA-STABLE OSCILLATORS FOR PLANETARY ENTRY PROBES S.W. Asmar (1), D.H. Atkinson (2), M.K. Bird (3), G.E. Wood (4) (1) Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109,
The Quantum Sensor Challenge Designing a System for a Space Mission. Astrid Heske European Space Agency The Netherlands
 The Quantum Sensor Challenge Designing a System for a Space Mission Astrid Heske European Space Agency The Netherlands Rencontres de Moriond - Gravitation, La Thuile, 2017 Quantum Sensors in Lab Experiments
The Quantum Sensor Challenge Designing a System for a Space Mission Astrid Heske European Space Agency The Netherlands Rencontres de Moriond - Gravitation, La Thuile, 2017 Quantum Sensors in Lab Experiments
New satellite mission for improving the Terrestrial Reference Frame: means and impacts
 Fourth Swarm science meeting and geodetic missions workshop ESA, 20-24 March 2017, Banff, Alberta, Canada New satellite mission for improving the Terrestrial Reference Frame: means and impacts Richard
Fourth Swarm science meeting and geodetic missions workshop ESA, 20-24 March 2017, Banff, Alberta, Canada New satellite mission for improving the Terrestrial Reference Frame: means and impacts Richard
An Improvement of Rinex-Shift Algorithm for Continuous GPS Carrier-Phase Time Transfer (Final Version).pdf
.pdf") University of Colorado Boulder From the SelectedWorks of Jian Yao 2014 An Improvement of Rinex-Shift Algorithm for Continuous GPS Carrier-Phase Time Transfer (Final Version).pdf Jian Yao, University of
University of Colorado Boulder From the SelectedWorks of Jian Yao 2014 An Improvement of Rinex-Shift Algorithm for Continuous GPS Carrier-Phase Time Transfer (Final Version).pdf Jian Yao, University of
Performance of the Kalman Filter of the Global Positioning System Operational Control Segment During January - March 1997*
 29th Annual P7.ec.ise Time and Time nterval (PTT) Meeting Performance of the Kalman Filter of the Global Positioning System Operational Control Segment During January March 1997* Marc Weiss, Audrey Zarr
29th Annual P7.ec.ise Time and Time nterval (PTT) Meeting Performance of the Kalman Filter of the Global Positioning System Operational Control Segment During January March 1997* Marc Weiss, Audrey Zarr
LISA Pathfinder measuring pico-meters and femto-newtons in space
 LISA Pathfinder measuring pico-meters and femto-newtons in space M Hewitson for the LPF team Barcelona, February 15th 2012 Observing from Space 2 Observing from Space 2 Observing from Space Push down to
LISA Pathfinder measuring pico-meters and femto-newtons in space M Hewitson for the LPF team Barcelona, February 15th 2012 Observing from Space 2 Observing from Space 2 Observing from Space Push down to
INFLUENCE OF THE HARMONIC DISTORTION ON SHORT- CIRCUIT TEST POWER FACTOR MEASUREMENT
 INFLUENCE OF THE HARMONIC DISTORTION ON SHORT- CIRCUIT TEST POWER FACTOR MEASUREMENT G. Crotti, G. Farina, L. Rege Istituto Elettrotecnico Nazionale Galileo Ferraris Torino Italy Abstract: The thermal
INFLUENCE OF THE HARMONIC DISTORTION ON SHORT- CIRCUIT TEST POWER FACTOR MEASUREMENT G. Crotti, G. Farina, L. Rege Istituto Elettrotecnico Nazionale Galileo Ferraris Torino Italy Abstract: The thermal
PERFORMANCE OF ATOMIC CLOCKS FLOWN ON THE SPACE SHUTTLE EXPERIMENT NAVEX
 PERFORMANCE OF ATOMIC CLOCKS FLOWN ON THE SPACE SHUTTLE EXPERIMENT NAVEX J. Hammesfahr, H. Nau, S. Starker Institute for Radio Frequency Technology German Aerospace Research Establishment: DFVLR D-803
PERFORMANCE OF ATOMIC CLOCKS FLOWN ON THE SPACE SHUTTLE EXPERIMENT NAVEX J. Hammesfahr, H. Nau, S. Starker Institute for Radio Frequency Technology German Aerospace Research Establishment: DFVLR D-803
ATOMIC CLOCK ENSEMBLE IN SPACE Mission status
 ATOMIC CLOCK ENSEMBLE IN SPACE Mission status Luigi Cacciapuoti on behalf of the ACES team 30/03/2017 Rencontres de Moriond 2017 - Gravitation, La Thuile ACES Luigi Cacciapuoti 30/03/2017 Slide 2 The Columbus
ATOMIC CLOCK ENSEMBLE IN SPACE Mission status Luigi Cacciapuoti on behalf of the ACES team 30/03/2017 Rencontres de Moriond 2017 - Gravitation, La Thuile ACES Luigi Cacciapuoti 30/03/2017 Slide 2 The Columbus
Use of GNSS for autonomous navigation on medium Earth orbits
 UDC 629.783(043.2) V. Konin, F.Shyshkov, O. Pogurelskiy (National Aviation University, Ukraine) Use of GNSS for autonomous navigation on medium Earth orbits Use of GNSS for space navigation is relatively
UDC 629.783(043.2) V. Konin, F.Shyshkov, O. Pogurelskiy (National Aviation University, Ukraine) Use of GNSS for autonomous navigation on medium Earth orbits Use of GNSS for space navigation is relatively
Status of the Gravitational Redshift Test with Eccentric Galileo Satellites
 Status of the Gravitational Redshift Test with Eccentric Galileo Satellites J. Ventura-Traveset, R. Prieto-Cerdeira, D. Blonski ICG 11, Sochi, 7 November 2016 Contents 1. Galileo satellites 5 & 6 Status
Status of the Gravitational Redshift Test with Eccentric Galileo Satellites J. Ventura-Traveset, R. Prieto-Cerdeira, D. Blonski ICG 11, Sochi, 7 November 2016 Contents 1. Galileo satellites 5 & 6 Status
LISA: THE LASER INTERFEROMETER SPACE ANTENNA
 LISA: THE LASER INTERFEROMETER SPACE ANTENNA Masimo Tinto Jet Propulsion Laboratory, California Institute of Technology Abstract The Laser Interferometer Space Antenna (LISA) is a deep-space mission, jointly
LISA: THE LASER INTERFEROMETER SPACE ANTENNA Masimo Tinto Jet Propulsion Laboratory, California Institute of Technology Abstract The Laser Interferometer Space Antenna (LISA) is a deep-space mission, jointly
RESPONSE OF A GEOSYNCHRONOUS SPACECRAFT S CRYSTAL OSCILLATOR TO SOLAR FLARES: RESULTS OF A SPACE EXPERIMENT
 RESPONSE OF A GEOSYNCHRONOUS SPACECRAFT S CRYSTAL OSCILLATOR TO SOLAR FLARES: RESULTS OF A SPACE EXPERIMENT J. Camparo, A. Presser, S. Lalumondiere, and S. Moss The Aerospace Corporation PO Box 92957,
RESPONSE OF A GEOSYNCHRONOUS SPACECRAFT S CRYSTAL OSCILLATOR TO SOLAR FLARES: RESULTS OF A SPACE EXPERIMENT J. Camparo, A. Presser, S. Lalumondiere, and S. Moss The Aerospace Corporation PO Box 92957,
Enhanced GPS Accuracy using Lunar Transponders
 Enhanced GPS Accuracy using Lunar Transponders G. Konesky SGK NanoStructures, Inc. LEAG - ICEUM - SSR Port Canaveral, FL Oct. 28-31, 2008 GPS Broadcast Ephemeris Error Nov. 1, 1997 Warren, 2002 Warren,
Enhanced GPS Accuracy using Lunar Transponders G. Konesky SGK NanoStructures, Inc. LEAG - ICEUM - SSR Port Canaveral, FL Oct. 28-31, 2008 GPS Broadcast Ephemeris Error Nov. 1, 1997 Warren, 2002 Warren,
THE APL TIME AND FREQUENCY LAB
 THE APL TIME AND FREQUENCY LAB R. A. Dragonette, M. Miranian, and M. J. Reinhart Johns Hopkins University, Applied Physics Laboratory Laurel, MD 20723-6099, USA Abstract The APL Time and Frequency Laboratory
THE APL TIME AND FREQUENCY LAB R. A. Dragonette, M. Miranian, and M. J. Reinhart Johns Hopkins University, Applied Physics Laboratory Laurel, MD 20723-6099, USA Abstract The APL Time and Frequency Laboratory
INTEGRATED OPERATIONAL PRECISE ORBIT DETERMINATION FOR LEO
 INTEGRATED OPERATIONAL PRECISE ORBIT DETERMINATION FOR LEO J. Fernández Sánchez, F. M. Martínez Fadrique, A. Águeda Maté, D. Escobar Antón GMV S.A., Isaac Newton, 8760 Tres Cantos, Spain, Email: jfernandez@gmv.com,
INTEGRATED OPERATIONAL PRECISE ORBIT DETERMINATION FOR LEO J. Fernández Sánchez, F. M. Martínez Fadrique, A. Águeda Maté, D. Escobar Antón GMV S.A., Isaac Newton, 8760 Tres Cantos, Spain, Email: jfernandez@gmv.com,
INVESTIGATING THE BIASES IN ALLAN AND HADAMARD VARIANCES AS MEASURES OF M TH ORDER RANDOM STABILITY
 43 rd Annual Precise Time and Time Interval (PTTI) Systems and Applications Meeting INVESTIGATING THE BIASES IN ALLAN AND HADAMARD VARIANCES AS MEASURES OF M TH ORDER RANDOM STABILITY Victor R. Reinhardt
43 rd Annual Precise Time and Time Interval (PTTI) Systems and Applications Meeting INVESTIGATING THE BIASES IN ALLAN AND HADAMARD VARIANCES AS MEASURES OF M TH ORDER RANDOM STABILITY Victor R. Reinhardt
5 Generation and Dissemination of Time and Frequency Standard
 5 Generation and Dissemination of Time and Frequency Standard 5-1 Algorithm of Ensemble Atomic Time HANADO Yuko, IMAE Michito, AIDA Masanori, HOSOKAWA Mizuhiko, ITO Hiroyuki, NAKAGAWA Fumimaru, and SHIMIZU
5 Generation and Dissemination of Time and Frequency Standard 5-1 Algorithm of Ensemble Atomic Time HANADO Yuko, IMAE Michito, AIDA Masanori, HOSOKAWA Mizuhiko, ITO Hiroyuki, NAKAGAWA Fumimaru, and SHIMIZU
ESA ITT AO/1-5209/07/NL/HE Contract No /07/NL/HE. NOVEL TIME SYNCHRONISATION TECHNIQUES FOR DEEP SPACE PROBES Executive Summary
 Page: 1 ESA ITT AO/1-5209/07/NL/HE Contract No. 21063/07/NL/HE NOVEL TIME SYNCHRONISATION TECHNIQUES FOR DEEP SPACE PROBES Executive Summary Responsibility: Name: Date: Approval: Prepared by: E. Rossini
Page: 1 ESA ITT AO/1-5209/07/NL/HE Contract No. 21063/07/NL/HE NOVEL TIME SYNCHRONISATION TECHNIQUES FOR DEEP SPACE PROBES Executive Summary Responsibility: Name: Date: Approval: Prepared by: E. Rossini
Formation Flying and Rendezvous and Docking Simulator for Exploration Missions (FAMOS-V2)
") Formation Flying and Rendezvous and Docking Simulator for Exploration Missions (FAMOS-V2) Galder Bengoa, F. Alonso, D. García, M. Graziano (GMV S.A.) Dr. Guillermo Ortega (ESA/ESTEC) 2nd ESA Workshop on
Formation Flying and Rendezvous and Docking Simulator for Exploration Missions (FAMOS-V2) Galder Bengoa, F. Alonso, D. García, M. Graziano (GMV S.A.) Dr. Guillermo Ortega (ESA/ESTEC) 2nd ESA Workshop on
Test Computations
 158 7. Test Computations.3.2.1 -.1 -.2 Fourier index 2.8.4 -.4 -.8 Fourier index 2.2.1 -.1 -.2 Fourier index 3.8.4 -.4 -.8 Fourier index 3.2.1 -.1 -.2 -.3 Fourier index 4.8.4 -.4 -.8 Fourier index 4.2.1
158 7. Test Computations.3.2.1 -.1 -.2 Fourier index 2.8.4 -.4 -.8 Fourier index 2.2.1 -.1 -.2 Fourier index 3.8.4 -.4 -.8 Fourier index 3.2.1 -.1 -.2 -.3 Fourier index 4.8.4 -.4 -.8 Fourier index 4.2.1
Probing Gravity with 2nd Generation Lunar Laser Ranging
 Probing Gravity with 2nd Generation Lunar Laser Ranging Manuele Martini (INFN-LNF) for the MoonLIGHT Collaboration D. G. Currie (PI) University of Maryland at College Park, MD, USA R. Vittori ESA-EAC Astronaut,
Probing Gravity with 2nd Generation Lunar Laser Ranging Manuele Martini (INFN-LNF) for the MoonLIGHT Collaboration D. G. Currie (PI) University of Maryland at College Park, MD, USA R. Vittori ESA-EAC Astronaut,
EESC Geodesy with the Global Positioning System. Class 4: The pseudorange and phase observables
 EESC 9945 Geodesy with the Global Positioning System Class 4: The pseudorange and phase observables In previous classes we had presented the equation for the pseudorange as the true range biased by the
EESC 9945 Geodesy with the Global Positioning System Class 4: The pseudorange and phase observables In previous classes we had presented the equation for the pseudorange as the true range biased by the
STUDIES OF AN OPTIMALLY UNBIASED MA FILTER INTENDED FOR GPS-BASED TIMEKEEPING
 33rdAnnual Precise Time and Time Interval (PTTI) Meeting STUDIES OF AN OPTIMALLY UNBIASED MA FILTER INTENDED FOR GPS-BASED TIMEKEEPING. Y Shmaliy, 0. Ibarra-Manzano, R. Rojas-Laguna, and R. Vazguez-Bautista
33rdAnnual Precise Time and Time Interval (PTTI) Meeting STUDIES OF AN OPTIMALLY UNBIASED MA FILTER INTENDED FOR GPS-BASED TIMEKEEPING. Y Shmaliy, 0. Ibarra-Manzano, R. Rojas-Laguna, and R. Vazguez-Bautista
ESTIMATION AND PREDICTION OF THE GIOVE CLOCKS
 ESTIMATION AND PREDICTION OF THE GIOVE CLOCKS Irene Hidalgo GMV, Madrid, Spain E-mail: ihidalgo@gmv.com R. Píriz, A. Mozo, G. Tobias, P. Tavella *, I. Sesia *, G. Cerretto *, P. Waller +, F. González +,
ESTIMATION AND PREDICTION OF THE GIOVE CLOCKS Irene Hidalgo GMV, Madrid, Spain E-mail: ihidalgo@gmv.com R. Píriz, A. Mozo, G. Tobias, P. Tavella *, I. Sesia *, G. Cerretto *, P. Waller +, F. González +,
CALCULATION OF POSITION AND VELOCITY OF GLONASS SATELLITE BASED ON ANALYTICAL THEORY OF MOTION
 ARTIFICIAL SATELLITES, Vol. 50, No. 3 2015 DOI: 10.1515/arsa-2015-0008 CALCULATION OF POSITION AND VELOCITY OF GLONASS SATELLITE BASED ON ANALYTICAL THEORY OF MOTION W. Góral, B. Skorupa AGH University
ARTIFICIAL SATELLITES, Vol. 50, No. 3 2015 DOI: 10.1515/arsa-2015-0008 CALCULATION OF POSITION AND VELOCITY OF GLONASS SATELLITE BASED ON ANALYTICAL THEORY OF MOTION W. Góral, B. Skorupa AGH University
The Compact Muon Solenoid Experiment. Conference Report. Mailing address: CMS CERN, CH-1211 GENEVA 23, Switzerland
 Available on CMS information server CMS CR -2009/0 The Compact Muon Solenoid Experiment Conference Report Mailing address: CMS CERN, CH-11 GENEVA 23, Switzerland May 2009 Calibration of the Barrel Muon
Available on CMS information server CMS CR -2009/0 The Compact Muon Solenoid Experiment Conference Report Mailing address: CMS CERN, CH-11 GENEVA 23, Switzerland May 2009 Calibration of the Barrel Muon
Information in Radio Waves
 Teacher Notes for the Geodesy Presentation: Possible discussion questions before presentation: - If you didn t know the size and shape of the Earth, how would you go about figuring it out? Slide 1: Geodesy
Teacher Notes for the Geodesy Presentation: Possible discussion questions before presentation: - If you didn t know the size and shape of the Earth, how would you go about figuring it out? Slide 1: Geodesy