Interaction of Two Travelling Wave Solutions of the Non-Linear Euler-Bernoulli Beam Equation
|
|
|
- Clifford Potter
- 5 years ago
- Views:
Transcription
1 Interaction of Two Travelling Wave Solutions of the Non-Linear Euler-Bernoulli Beam Equation Shaun Mooney March 26,
2 Contents 1 Introduction 5 2 History of Beam Bending 9 3 Bridges 10 4 LAPACK & CBLAS 13 5 Travelling Waves 16 6 Solitons 19 7 Finite Difference Methods 21 8 Results 31 9 Conclusion 43 References 45 2
3 Abstract We wish to consider the Non-Linear Euler-Bernoulli beam equation, a partial differential that is fourth order in space and second order in time which models the bending of beams. We wish to look at how travelling wave solutions to the aforementioned equation evolve in time and hope to observe that they act in similar way to a set of of partial differential equation known as solitons, that is, upon the interaction of two such solutions, we will see that they emerge relatively unscathed, except for a phase shift. 3
4 Acknowledgements My most sincere thanks must go, first and foremost, to Professor John Stalker. Without his patience, knowledge and guidance this project would not have been completed. My gratitude extends to many other people, not least of whom being Cathal Ó Ruaidh whose brilliant knowledge of both programming and partial differential equations was invaluable. For enlightening me on the history and derivation of the Euler-Bernoulli beam equation I must thank Professor Paschalis Karageorgis. For helping me with gnuplot and C, I would like to thank Louise and Colin, respectively. I would also like to thank the latter for keeping the insanity at bay by writing many brilliant scripts and keeping a pretty decent twitter feed going. 4
5 1 Introduction The Euler-Bernoulli beam partial differential equation is u tt + u xxxx + f (u(x,t)) = 0 (1) where f (u(x,t)) is the non-linearity of the equation. The higher order terms are present because the beam offers resistance to bending. This is how the beam equation differs from, say, that of a vibrating string. If being solved analytically, this equation can be re-written as ρ(x) 2 t 2 u(x,t) + EI(x) 2 This version of the equation is derived in [8]. + f (u(x,t)) = 0 (2) x2 In order to derive equation (1) we need to use Newton s second law of motion and Hooke s law. The former states that force is equal to mass times acceleration, or Force = ma = mu tt An application of Hooke s law states that when an elastic body is deformed in any way the strain is directly proportional to the stress [19]. This can be related to the bending motion using the curvature which can be found by finding the tangential at any point on the beam. This tells us that Force u xxxx, which in turn leads us to equation (1). The first in depth look into this equation was done by Walter and McKenna in 1990 where they used the piece-wise linear model model u tt + u xxxx + u + 1 = 0 This model, however, is not smooth and led to the study of the exponential u tt + u xxxx + e u 1 = 0 5
6 as will be shown later. First, let us consider the piecewise smooth model. We have u tt + u xxxx = cable force where u xxxx is the beam force. We take the deflections of the beam to be in one dimension only, that is, the z direction. In order to obtain the cable force (the non-linearity), we look at Hooke s Law which says that the force is proportional to the displacement of the beam. So k displacement, if u < 0 Force = 0, if u > 0 ku, if u < 0 = 0, if u > 0 = k min(u,0) This leads us to the equation u tt + u xxxx + k min(u,0) = 0 This is called the piecewise linear model and it was studied by McKenna and Walter in [16] and can be rewritten as u tt + u xxxx + u + 1 = 0 This, however, is not a desirable model to use as it has one major drawback: it is not smooth, i.e. it is not differentiable at the origin. So, we require a different model. It is possible to shift figure 1 in order to obtain a more satisfactory non-linear term. It can be shown that figure 2 can be approximated by a smooth function and, therefore, is smooth everywhere. We proceed to look for a factor that has u near the origin and 1 near infinity. A satisfactory function here is f (u) = 1+e u. It is easy to see that as u, f (u) 1. To see an approximation of this function near the origin, we look at 6
7 Figure 1: Piecewise Linear Model of the Euler-Lagrange Beam Equation 7
8 Figure 2: Exponential Model of the Euler-Lagrange Beam Equation the function e x 1 + x. Replacing x with u yields e u 1 u. Rearranging, 1 + e u u. Therefore, which leads to u tt + u xxxx + k[min(u + 1,0)] = 0 u tt + u xxxx + e u 1 = 0 In [13], Karageorgis and McKenna prove ground state solutions exist for this model and allude to the first attempt to solve it numerically by Choi and McKenna, in [6], using the mountain pass theorem. However, they also mention that shooting methods were a faster and more efficient substitute. This idea was explored by Champneys, McKenna and Zegeling in [4]. 8
9 2 History of Beam Bending The problem of beam bending was first considered by Leonardo Da Vinci( ), although he did not have Hooke s Law and was, therefore, not able to do a proper analysis. Da Vinci s work on the subject is described in document called The Codex Madrid [7] which was discovered in 1967[9]. Before The Codex Madrid was found, it was believed that Galileo Galilei( ) was the first to look at the idea of a bending beam. Problems with da Vinci s work, namely his neglection of the strength of the beam and the tensile strength of the material, were addressed by Galileo in his work Dialogues(1638). However, he made incorrect assumptions in his calculations and he got incorrect results. It wasn t until 1713 that Antoine Parent( ) addressed these misguided assumptions in Galileo s work and managed to derive the correct formula for the bending of cantilever beams[10]. In the 18 th century, Charles-Augustin de Coulumb( ) began his work with the theory of beam bending using Parent s conclusions as a basis. He considered how beams made of different materials, like stone and timber, reacted under forces[11]. The vast majority of the work developing a theory for beam bending was done by members of the Bernoulli family and Leonhard Euler( ), who was a student of Daniel Bernoulli. Jacob Bernoulli( ) used infinitesimal calculus to look at deflections in cantilever beams[11]. His nephew, Daniel( ), and Euler did significant work with variational calculus to derive the equations of elastic curves. In 1834 John Scott Russell observed the phenomenon now known as solitons. He observed shallow water waves which we now know can be modelled using the KdV equation. However, the beam equation is also a soliton and, hence, obeys similar laws. Analysis of travelling waves of the Euler-Bernoulli beam equation was begun by Walter and McKenna in 1990[16]. Since then many other mathematicians have tried their hands at these problems and many results have come forth. 9
10 3 Bridges The most common set of examples of the Euler-Bernoulli beam equation in real life are bridges or, more specifically, when bridges collapse. There are many reasons why a bridge could fail (examples include when strong winds blow, people walking, etc.), however, before it does it oscillates wildly. These oscillations are travelling waves. An example of a bridge collapse is the Tacoma Narrows Bridge. 3.1 Tacoma Narrows The Tacoma Narrows Bridge was a suspension bridge built in 1940 in Tacoma, Washington and was first opened to the public in July of that year. It was built to connect the mainland to the Kitsap Peninsula, over the Tacoma Narrows Strait. From the outset, even during construction, it was noticed that the bridge seemed to oscillate when the wind was blowing, even a relatively weak wind (in fact, as a result of the oscillations the locals began calling the bridge Galloping Gertie ). This obviously caused quite a bit of concern with those involved and steps were taken to look for methods of controlling the oscillations at the University of Washington[1]. These precautions included installing hydraulic buffers at the towers in order to control the stresses and, in the side spans tie down cables were installed. However, despite the best efforts of those involved the undulations continued. Even after the bridge was opened and the oscillations continued, the bridge officials refused to close it, despite concerns raised about it s safety. A possible reason for this could be the multitude of people and cars crossing the bridge, all of whom were paying the Toll Authority money, in order to see the amazing moving bridge. It has been noted how cars would seemingly disappear as they drove over it, only adding to spectacle[14]. Not surprisingly, such a structure is clearly not stable and in November 1940, not even five months after it was first opened, the bridge collapsed. In a relatively short time period, the amplitude of the oscillations increased dramatically and became more violent and, eventually, the bridge collapsed due to aeroelastic flutter. Luckily the bridge was free of people when it collapsed, however, tragically, there 10

11 was a car left on it with a dog trapped inside who did not survive. What made the Tacoma Narrows Bridge so famous was that it s catastrophic collapse was caught on camera. Unfortunately, due to the inherent limitations of printed paper, I cannot show said video here. However, if any reader wishes to see it, it is readily available on the internet. Video was taken by four men in total. Two local camera store owners who got wind that the bridge was in a lot of trouble got one video. Barney Elliott stood on the right side, while Harbine Monroe worked from the left. Walter Miles took another video and, finally, so did Professor F. B. Farquharson, which is perhaps the most famous of all.[18] Figure 3: Tacoma Narrows[2] 11

12 Figure 4: The Tacoma Narrows Bridge collapsing[17] 12
13 4 LAPACK & CBLAS LAPACK is a package for numerically solving systems of linear equations. LA- PACK stands for Linear Algebra Package and is ideal for banded, sparse matrices which, as we will see, is exactly what we will be dealing with here. It is a linear algebra library that was written in Fortran 77. As well as analysing and solving systems of equations, LAPACK is also ideal for matrix eigenvalue problems and least square problems. Note that, when using routines, there are four different versions of each routine. These are c, d, s and z. These denote the use of single precision complex points, double precision floating points, single precision floating points and double precision complex points, respectively. The BLAS, which is an acronym for basic linear algebra subprograms, was created in order to make LAPACK more portable and efficient and can be easily optimised for numerous different systems, depending on what the user is running on. It includes many routines to perform linear algebra operations. Like LAPACK, BLAS was originally written for Fortran, with CBLAS being the implementation in C. CBLAS routines are split up into three levels. Level one contains vector-vector operations. Examples of these include scalar addition and multiplication. This is visualised as y αx+y, which is implemented using the command cblas axpy, where is one of c, d, s or z. Also included in level one are dot products, inner products and the ability to copy a vector and swap two vectors, among other operations. Level 2 includes matrix-vector operations. These can be performed on many different types of matrix, including banded, hermitian, packed, symmetric and triangular. Routines such as cblas sbmv multiply a symmetric and banded matrix by a vector, whereas cblas trsv will solve the system of equations Ax = b, where A is a triangular matrix. Level 3 includes matrix-matrix operations. These include operations such as multiplying and adding matrices and solving linear systems. There is also the ability for dealing with the same types of matrices as level 2. 13
14 4.1 Example An example of a program using LAPACK and CBLAS to multiply two matrices is as follows void main(int argc, char **argv) { matrix A, B, C; FILE *afile; FILE *bfile; FILE *cfile; FILE *dfile; afile = fopen("a", "r"); bfile = fopen("b", "r"); cfile = fopen("c", "r"); dfile = fopen("d", "w"); A = readmat(afile, "A", CblasRowMajor); B = readmat(bfile, "B", CblasRowMajor); C = readmat(cfile, "C", CblasRowMajor); ndgemm(cblasrowmajor, CblasNoTrans, CblasNoTrans, 1.0, A, B, 1.0, C); dumpmat(dfile, C, "D", "%7.3f"); } fclose(afile); fclose(bfile); fclose(cfile); fclose(dfile); In this code matrix is a struct which defines a matrix, instead of the usual method of using arrays. The readmat and dumpmat functions read in a matrix from a file and write a matrix to a file, respectively. Of course, there are equivalent usages for vectors and also for dealing with individual entries of matrices and vectors, but I digress. 14
15 The function ndgemm is where the action really happens. This is defined in a wrapper function which calls cblas dgemm from the CBLAS library. This routine multiples a matrix A by a matrix B and then by some constant α. The result of this added to a matrix C multiplied by some constant β. The answer is then stored in C. In shorthand, this routine can be expressed as C αab + βc. Finally, note the use of CblasRowMajor and CblasNoTrans. These are two of the many options that are usable in order to optimise the system that you have to deal with. The former tells CBLAS that we want to use row major matrices instead of column major, which Fortran uses, and the latter tells CBLAS that we do not want to transpose our matrix. Similarly, other routines enable the user to choose between upper and lower triangular matrices and also to decide between left and right multiplication of matrices. Note that there are some restrictions as to what precision points can be used for certain routines. For example, in level 2 operations with symmetric matrices and some matrix updates cannot be used with type c or z. Likewise, operations involving hermitian matrices can only be used with types c and z. The latter is, of course, obvious because hermitian matrices involve complex conjugates, by definition. 15
16 5 Travelling Waves We know that there exist travelling wave solutions to the piecewise linear Euler- Bernoulli beam equation. This was shown by Chen and McKenna[5]. They proved existence of equation (1) with non-linearity f (u) = u + 1. This is the equation that corresponds to a suspended bridge that is a beam supported by cables. Travelling wave solutions are found by setting u = u(x ct) = f (x ct) Computing derivatives of f in x yields f x (x ct) = f (x ct) f xx (x ct) = f (x ct) f xxx (x ct) = f (x ct) f xxxx (x ct) = f (x ct) Computing derivatives of f in t yields f t (x ct) = c f (x ct) f tt (x ct) = c 2 f (x ct) where c is the speed of the wave. We define u u = u x u xx u xxx u x u xx u xxx u = c 2 u xx + e u 1 (3) 16
17 We wish to linearise e u 1, that is to find a linear approximation of the function at u = 0. To do this we use the point-slope formula, i.e. find an equation of the form f (u 2 ) f (u 1 ) = m(u 2 u 1 ) (4) So, we must look for the slope, m, of f (u) = e u 1 at u = 0. The derivative of f with respect to u is f (u) = e u and f (0) = 1. So at u = 0, m = 1, and f (u) = e 0 1 = 0. Subbing into equation (4) gives f (u) = u. Therefore, the linearisation of e u 1 at u = 0 is u. We consider u x u = u xx u xxx c 2 u xx + e u 1 again. Re-writing this in matrix form we get u = A u + B where and A = c B = 0 0 e u 1 u 17
18 is when our travelling wave is at rest. The equation, therefore, written in full matrix form, is u = A u + B u 0 = u x u xx c 2 0 e u 1 u We now have the equation u xxx f iv + c 2 f + e f 1 = 0 where f = f (x ct) Numerical analysis of partial differential equations are notoriously unstable, and this situation is no different. In fact it has been proven by Champneys and McKenna, in [3], that the only stable solutions exist for 0 < c < 2. 18
19 6 Solitons In 1834, a man by the name of John Scott Russell was the first to observe and consider what is now a special set of equations, called solitons. Solitons are special because they are remarkably stable, even under interaction with each other. Whenever one decides to learn about solitons Russell is always mentioned as the first person to observe this phenomenon and, in particular, he is always quoted with the same quote. For reasons of conformity I give this quote here. I also offer it because it is a very good description straight from the horse s mouth[20]: I was observing the motion of a boat which was rapidly drawn along a narrow channel by a pair of horses, when the boat suddenly stopped - not so the mass of water in the channel which it had put in motion; it accumulated round the prow of the vessel in a state of violent agitation, then suddenly leaving it behind, rolled forward with great velocity, assuming the form of a large solitary elevation, a rounded, smooth and well-defined heap of water, which continued its course along the channel apparently without change of form or diminution of speed. I followed it on horseback, and overtook it still rolling on at a rate of some eight or nine miles an hour, preserving its original figure some thirty feet long and a foot to a foot and a half in height. Its height gradually diminished, and after a chase of one or two miles I lost it in the windings of the channel. Such, in the month of August 1834, was my first chance interview with that singular and beautiful phenomenon which I have called the Wave of Translation. It nearly took another fifty years for Russell s observations to be rigorously analysed mathematically and a suitable model found. It wasn t until 1895 that an equation was found to describe the special waves that Russell observed. It was two Dutch mathematicians, Diederik Korteweg and Gustav de Vries, who finally found an equation to describe weakly nonlinear shallow water waves[15]. The Korteweg-de Vries, or KdV, equation is u t + u xxx 6uu x = 0 19
20 A method for finding solutions to this equation and a short discussion of it can be found in [21]. Strauss mentions that the stability properties of the KdV equation were discovered by Kruskal and Zabusky in the 1960s. In fact, the following behaviour can be generalised for all solitons. Upon interaction, two solitons combine in some complicated manner and emerge unscathed except for a phase shift. Since the equation we are dealing with here is also a soliton and, therefore, displays the same kind of behaviour as the KdV equation, we should expect similar results under the interaction of two solutions. 20
21 7 Finite Difference Methods Finite Differences are a popular method to numerically approximate ordinary and partial differential equations. Numerical solvers to these equations are very useful because most of them, especially partial differential equations, either cannot be solved analytically, or they can be solved with great difficulty. There are many reasons why finite difference methods in particular are very popular, not least of which being because they are closely related to the derivative itself. They are formulated by replacing the derivative with a difference equation. We can find an expression for the first derivative of a function, f say, using a Taylor Expansion. Taylor s Theorem states that a k times differentiable function, for k 1, at the point x 0 can be written in the form f (x) = f (x 0 )+ f (x 0 )(x x 0 )+ 1 2 f (x 0 )(x x 0 ) k! f (k) (x 0 )(x x 0 ) k +R k (x 0 )(x x 0 ) k (5) where lim x x0 R k = 0 We can use the above expression in our finite difference method by setting x x 0 = h. Thus, f (x 0 + h) = f (x 0 ) + f (x 0 )h h2 f (x 0 ) + 1 3! h3 f (x 0 ) + = f (x 0 ) + f (x 0 )h + R 1 (x) (6) where R 1 (x) is the remainder term. Rearranging, we find that For sufficiently small R 1 (x), we find that f (x 0 )h = f (x 0 + h) f (x 0 ) R 1 (x) f (x 0 ) = f (x 0 + h) f (x 0 ) R 1 (x) h (7) f (x 0 ) f (x 0 + h) f (x 0 ) h This is called the forward difference of a function, f, and it gives us an approximate solution to the first derivative of that function when h is suitably small, (8) 21
22 i.e. f (x) = lim h 0 f (x + h) f (x) h Note that, as well as forward differences, we can also define central and backward differences. The former are written as f (x) while the latter take the form f (x + h) f (x h) 2h (9) f (x) f (x) f (x h) h (10) Backward difference are derived similarly to forward differences. Instead of getting a Taylor series for f (x + h), we obtain it from This is then rearranged to get (10). f (x h) = f (x 0 ) f (x 0 )h + (11) Equation (9) can be found a number of ways. Adding (8) and (10) gives the result, as does taking an average of our expressions for forward and backward differences. Forward differences effectively describe the slope at a point in terms of the point itself and a point one step-size further along the path. Backward differences calculate the slope using the point itself and the previous point. Central differences don t use the point at which it wants the slope at. Instead it uses the point ahead and behind it. The terms used are clearly very intuitive. We now want to consider this problem on a lattice, which is a mesh of intersecting points where each mesh-point is a point in our finite difference scheme. We will also need to generalise to dimensions, i.e. one temporal and one spatial dimension. This is done easily enough. For the temporal dimension we don t run over step-sizes of the spatial part. All this effectively means is that we replace h by t and introduce an x part. Thus u t = u(t + t,x) u(t,x) t 22
23 Similarly, for the spatial portion we have u x = u(t,x + x) u(t,x) x 7.1 Differences for Higher Order Derivatives As we are dealing with a fourth order differential equation, a first order difference method is clearly not going to be enough. Therefore, we must take this higher, i.e. we need an approximation for the second derivative and an approximation for the fourth derivative. To get an expression for the second derivative we use the Taylor series in two variables, t and x, around t only u(t,x) = u(t 0,x) + u t (t 0,x)(t t 0 ) + u tt (t 0,x)(t t 0 ) 2 + O(t t 0 ) 3 Substituting t t 0 = t into the above equation, we obtain u(t 0 + t,x) = u(t 0,x) + tu t (t 0,x) ( t)2 u tt (t 0,x)(t t 0 ) 2 + O( t) 3 and now substituting in t t 0 = t, we get u(t 0 t,x) = u(t 0,x) tu t (t 0,x) ( t)2 u tt (t 0,x) + O( t) 3 Adding the two above equations yields u(t + t,x) + u(t t,x) = 2u(t,x) + ( t) 2 u tt (t,x) ( t) 2 u tt (t,x) = u(t + t,x) 2u(t,x) + u(t t,x) u tt (t,x) = u(t + t,x) 2u(t,x) + u(t t,x) ( t) 2 Thus, we have an expression for the second derivative of u with respect to t. We can use it to come up with a general expression for the second derivative, i.e. 23
24 2 u = u(t + t,x) 2u(t,x) +U(t t,x) u tt (t,x) = u tt (t,x) = 2 u ( t) 2 u(t + t,x) 2u(t,x) +U(t t,x) ( t) 2 From the definition of the forward difference we have u tt (t,x) = ( ) 2 u = (u(t + t,x) u(t,x)). From [12] we have a general expression for this operator: n u = ( n 1 u) to x Using this we derive an expression for the fourth derivative of u with respect n u(t,x) = ( n 1 u(t,x)) 4 u(t,x) = ( 3 u(t,x)) = ( ( 2 u(t,x))) = ( (u(t,x) 2u(t,x x) + u(t,x 2 x))) = (u(t,x + x) u(t,x) 2u(t,x) + 2u(t,x x) + u(t,x x) u(t,x 2 x)) = (u(t,x + x) 3u(t,x) + 3u(t,x x) u(t,x 2 x)) = u(t,x + 2 x) u(t,x x) 3u(t,x + x) + 3u(t,x) + 3u(t,x) 3u(t,x x) u(t,x x) + u(t,2 x) = u(t,x + 2 x) 4u(t,x + x) + 6u(t,x) 4u(t,x x) + u(t,x 2 x) Therefore, u xxxx (t,x) = u(t,x + 2 x) 4u(t,x + x) + 6u(t,x) 4u(t,x x) + u(t,x 2 x) ( x) 4 24
25 7.2 Reintroducing the equation These approximations can now be plugged into our original partial differential equation u tt + u xxxx + f (u) = 0 u(t + t,x) 2u(t,x) + u(t t,x) ( t) 2 + u(t,x + 2 x) 4u(t,x + x) + 6u(t,x) 4u(t,x x) + u(t,x 2 x) ( x) 4 + f (u(t,x)) = 0 Rewriting the above equation using the substitutions t = m t and x = n x and letting u(m t,n x) = u n (m t), we have u n (t + t) 2u n (t) + u n (t t) ( t) 2 + u n+2(t) 4u n+1 (t) + 6u n (t) 4u n 1 (t) + u n 2 (t) ( x) 4 + f (u n (t)) = 0 u n (t + t) = ( t)2 ( x) 4 ( u n+2(t) + 4u n+1 (t) 6u n (t) + 4u n 1 (t) u n 2 (t)) + 2u n (t) u n (t t) ( t) 2 f (u n (t)) u n (t + t) = ( t)2 ( x) 4 u n 2(t) + 4 ( t)2 ( x) 4 u n+1(t) + (2 6 ( t)2 ( x) 4 )u n(t) + 4 ( t)2 ( x) 4 u n 1(t) t to be ( t)2 ( x) 4 u n 2(t) u n (t t) ( t) 2 f (u n (t)) (12) We define the approximate solution to the partial differential equation at time 25
26 . u n 1 (t) u(t) = u n (t) u n 1 (t). This gives us our solution to the partial differential equation at time t in matrix form. In order to numerically solve for this we must make everything else into matrix form also. This amounts to turning equation (12) into a combination of vectors and matrices. From the definition of u(t) above, u(t + t) and u(t t) can be similarly defined by and. u n 1 (t + t) u(t + t) = u n (t + t) u n 1 (t + t).. u n 1 (t t) u(t t) = u n (t t) u n 1 (t t). We now require a matrix which gives us the same values as equation (12). We can see that this matrix will be symmetric since the coefficient of u n+1 (t) is equal to the coefficient of u n 1 (t) and the coefficient of u n+2 (t) is equal to the coefficient of u n 2 (t), i.e. 4 ( t)2 ( x) 4 and ( t)2 ( x) 4, respectively. Putting this matrix together, and letting ( t)2 ( x) 4 = p, gives 26
27 2 6p 4p p 0 2 6p 4p p 2 6p 4p... where the entries below the diagonal mirror the entries above as the matrix is symmetric. Therefore, our full matrix representation of equation (12) is u(t + t) = Au(t) u(t t) ( t) 2 f (u(t)) p 4p p 0 u n 1 (t + t) 2 6p 4p p u n 1 (t) u n 1 (t t) u n (t + t) = u n 1 (t + t) 2 6p 4p u n (t) u n (t t)... u n 1 (t) u n 1 (t t).... f (u n 1 (t)) ( t) 2 f (u n (t)) f (u n 1 (t)). (13) where f (u)t)) is the non-linear term. Notice that, in the above equation, we have three unknown temporal values of u, namely t t, t and t + t. Since we only have one initial value we need to eliminate one of these. To do this we use the calculus of finite differences as outlined by Strikwerda in [22]. We want to look at a central difference. By the Taylor series, we have u(x + h) = h i i=0 i! i u(x) = e h This leads to the following expression for the forward difference 27
28 e hd 1 h and the backward difference can be written as where D is the differential operator. 1 e hd h Thus, combining the two equations above we find that the central difference can be expressed By the Taylor series we have = 1 ( e hd ) e hd 2 h h = ehd e hd 2h = sinh(hd) h D = arcsinh(h ) h D = h 1 6 (h )3 h u x (t,x) = 1 6 h2 ( ) 3 We are looking for a derivative in t, so we must find some relation between u x and u t. Since our solutions are travelling waves we can look u(t,x) = f (x ct). Differentiating we find that where c is the speed of our wave. Taking h = x, we get u t = c u x 28
29 u t (t,x) = cu x (t,x) ( ) u(t,x + x) u(t,x x) = c 2 x ( + c 1 6 ( = c 1 12 x u t (0,x) = c = c ( 1 u(t,x + 2 x) 2u(t,x + x) + 2u(t,x x) u(x,t 2 x 2 x u(t,x + 2 x) + u(t,x + x) u(t,x x) + u(t,x 2 x) 3 x 3 x 12 x u(0,x + 2 x) + u(0,x + x) u(0,x x) + 3 x 3 x 12 x 12 x ( u(0,x + 2 x) u(0,x + x) + u(0,x x) 12 x 3 x 3 x As before, this can be represented in matrix notation and calculated numerically. Explicitly, t = c x 0 3 x 2 c 1 12 x x c x 12 x 12 x 1 c 2 3 x c 0 3 x ) ) ) u(0,x 2 x) ) u(0,x 2 x) 12 x (14) (15) We are now able to calculate the first time step. To do this we consider our finite difference scheme at t = 0, u( t,x) + u( t,x) = Au(0,x) ( t) 2 f (u(0,x)) (16) and a finite difference for the first derivative of t, u( t,x) u( t,x) = 2 tu t (0,x) (17) Adding equations (16) and (17) we get 2u( t,x) = Au(0,x) ( t) 2 f (u(0,x)) + 2 tu t (0,x) u( t,x) = 1 2 Au(0,x) 1 2 t)2 f (u(0,x)) + tu t (0,x) 29
30 and we can now use this to find further temporal values. An important aspect of these calculations is the correct choice of t and x. The initial data I am using was generated on an interval of [ 60,60] over a beam of length 600 so, therefore, we have x = 1 5 = 0.2. What we must now do is choose a time step which will make sure that the travelling wave remains stable. The stability condition we use, which comes from [4], is t ( x) t t 1 50 (18) In order to satisfy this inequality, choose t = 80 1 = We now have a finite difference scheme with the stability condition satisfied. It should be clear that the bulk of the work takes place using this finite difference model. However, to hard code this would be relatively difficult. This is where LAPACK and CBLAS routines come into their own. They make coding linear algebra exceptionally easy. To illustrate this, I present my code that runs inside a for-loop and is the most important part of the code. ndsbmv(cblasrowmajor, CblasUpper, 1.0, sybify(a, 2), x, -1.0, y); ndaxpyv(-dt*dt, z, y); This is incredibly simple code that performs some not-so-simple computations. The first line of the code calls the CBLAS routine cblas dsbmv, which takes a symmetric and banded matrix, A, of band width 2, multiplies it by a vector x and then subtracts a vector y. The vector y is then replaced with the answer. The second function calls the CBLAS routine cblas daxpy which adds the vector y to ( t) 2 times z. The vector z here is, of course, the non-linearity term in our partial differential equation. This quick illustration shows just how useful implementations such as LA- PACK and CBLAS really are and how much they simplify the coding process. 30
31 8 Results The idea of this project is to look at the interaction of two solutions. Therefore, we need two solutions with which to propagate over time. These two solutions are travelling waves and differ only in that they have been generated using different speeds. The first one was computed taking c 2 = 1 and is shown in figure 5. Figure 5: solution with c 2 = 1 The second solution has been generated with c 2 = 0.25 and can be seen in figure 6. 31
32 Figure 6: solution with c 2 = 0.25 We now want to look at how these interact with each other. Positioning each one at either end of our beam, as in figure 7, we wish for them to move towards each other. 32
33 Figure 7: A solution with c = 0.5 on the left and a solution with c = 1 on the right Evolving this system in time, we get the following results: 33
34 34
35 35
36 In order to demonstrate the stability condition given in equation (18), we will look at what happens to a wave that doesn t satisfy this t 1 Taking t = 25 1, we find that the wave with c = 1 behaves as follows
37 Figure 8: An unstable solution with c = 1 37
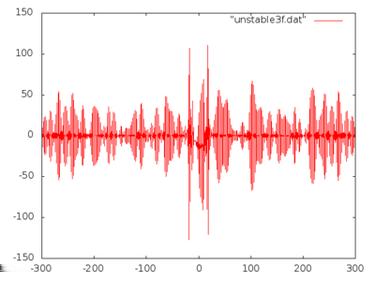
38 38
39 This solution is clearly very unstable and blows up after a very short amount of time. We have already looked at what happens when two solitons moving in opposite directions interact. Now let us consider two solitons moving in the same direction. This time we begin with both waves on the same side of the beam, the slower one in front of the faster one, and we carry out the same experiment as before. 39
40 40
41 41
42 As we can see, these interactions are remarkably stable, with the each wave emerging intact except for a phase shift. As well as the Euler-Bernoulli beam equation, there are many other equations that show these same properties. Some examples of these, that is partial differential equations with soliton solutions, include the aforementioned KdV equation, the Non-Linear Shrödinger equation and the Sine-Gordon equation. 42
43 9 Conclusion Since the first observation of solitons by Russell in 1834, they have been studied by a great many people. Their stability properties have been well documented and, in this paper, we see them again. We have seen, by numerically solving the Euler-Bernoulli beam equation using the finite difference method, that these stability properties do in fact hold and, furthermore, that they are even stable under interaction with each other. This finite difference method was implemented with matrix notation by using a package to deal with linear algebra called LAPACK and was supplemented with another package called CBLAS. A travelling wave solution was fired along a beam and shown to display the desirable stability properties. We have seen that this stability holds for waves moving in opposite directions and also for waves moving in the same direction. The stability property used was equation (18), given in [4]. We have also seen that violating this stability causes the wave to oscillate wildly and, eventually, blow up. 43
44 References [1] Tacoma narrows [2] Tacoma narrows picture [3] A. R. Champneys and P. J. McKenna. On solitary waves of a piecewise linear suspended beam model. Nonlinearity, 10(6): , [4] A. R. Champneys, P. J. McKenna, and P. A. Zegeling. Solitary waves in nonlinear beam equations: stability, fission and fusion. Nonlinear Dynam., 21(1):31 53, The theme of solitary waves and localization phenomena in elastic structures. [5] Y. Chen and P. J. McKenna. Traveling waves in a nonlinearly suspended beam: theoretical results and numerical observations. J. Differential Equations, 136(2): , [6] Y. S. Choi and P. J. McKenna. A mountain pass method for the numerical solution of semilinear elliptic problems. Nonlinear Anal., 20(4): , February [7] Leonardo Da Vinci. The Codex Madrid. Natioanl Library of Spain, [8] Bill Goodwine. Engineering Differential Equations: Theory & Applications. Springer. [9] Doug Jeknins. The History of the Theory of Beam Bending - Part 1@ON- LINE. [10] Doug Jeknins. The History of the Theory of Beam Bending - Part 2@ON- LINE. [11] Doug Jeknins. The History of the Theory of Beam Bending - Part 3@ON- LINE. [12] Charles Jordan. Calculus of Finite Differences. Chelsea Publishing Company New York, N.Y.,
45 [13] Paschalis Karageorgis and P. J. McKenna. The existence of ground states for fourth-order wave equations. Nonlinear Anal., 73(2): , [14] Mark Ketchum. A short history of galloping [15] Mathworld. Korteweg-de vries equation@online. [16] P. J. McKenna and W. Walter. Travelling waves in a suspension bridge. SIAM J. Appl. Math., 50(3): , [17] npr. Tacoma narrows picture 2@ONLINE. [18] Washington State Dept. of Transportation. Tacoma narrows bridge@online. [19] B. Pearson. Deflection of a beam - young s modulus@online. [20] John Scott Russell. Report On Waves. British Association, [21] Walter Strauss. Partial Differential Equations: An Introduction. Wiley. [22] John Strikwerda. Finite Differentaik Schemes and Partial Differential Equations. Siam. 45
Solitons : An Introduction
 Solitons : An Introduction p. 1/2 Solitons : An Introduction Amit Goyal Department of Physics Panjab University Chandigarh Solitons : An Introduction p. 2/2 Contents Introduction History Applications Solitons
Solitons : An Introduction p. 1/2 Solitons : An Introduction Amit Goyal Department of Physics Panjab University Chandigarh Solitons : An Introduction p. 2/2 Contents Introduction History Applications Solitons
Shock Waves & Solitons
 1 / 1 Shock Waves & Solitons PDE Waves; Oft-Left-Out; CFD to Follow Rubin H Landau Sally Haerer, Producer-Director Based on A Survey of Computational Physics by Landau, Páez, & Bordeianu with Support from
1 / 1 Shock Waves & Solitons PDE Waves; Oft-Left-Out; CFD to Follow Rubin H Landau Sally Haerer, Producer-Director Based on A Survey of Computational Physics by Landau, Páez, & Bordeianu with Support from
Solitons in optical fibers. by: Khanh Kieu
 Solitons in optical fibers by: Khanh Kieu Project 9: Observation of soliton PD (or autocorrelator) ML laser splitter Er-doped Fiber spool 980nm pump PD (or autocorrelator) P 0 is the free parameter What
Solitons in optical fibers by: Khanh Kieu Project 9: Observation of soliton PD (or autocorrelator) ML laser splitter Er-doped Fiber spool 980nm pump PD (or autocorrelator) P 0 is the free parameter What
Nonlinear Optics (WiSe 2017/18) Lecture 12: November 28, 2017
 Lecture 12: November 28, 2017") 7.6 Raman and Brillouin scattering 7.6.1 Focusing Nonlinear Optics (WiSe 2017/18) Lecture 12: November 28, 2017 7.6.2 Strong conversion 7.6.3 Stimulated Brillouin scattering (SBS) 8 Optical solitons 8.1
7.6 Raman and Brillouin scattering 7.6.1 Focusing Nonlinear Optics (WiSe 2017/18) Lecture 12: November 28, 2017 7.6.2 Strong conversion 7.6.3 Stimulated Brillouin scattering (SBS) 8 Optical solitons 8.1
Nonlinear Optics (WiSe 2015/16) Lecture 7: November 27, 2015
 Lecture 7: November 27, 2015") Review Nonlinear Optics (WiSe 2015/16) Lecture 7: November 27, 2015 Chapter 7: Third-order nonlinear effects (continued) 7.6 Raman and Brillouin scattering 7.6.1 Focusing 7.6.2 Strong conversion 7.6.3
Review Nonlinear Optics (WiSe 2015/16) Lecture 7: November 27, 2015 Chapter 7: Third-order nonlinear effects (continued) 7.6 Raman and Brillouin scattering 7.6.1 Focusing 7.6.2 Strong conversion 7.6.3
Convergence of operator splitting for the KdV equation
 Convergence of operator splitting for the KdV equation H. Holden Norwegian University of Science and Technology Trondheim, Norway Joint work with K.H. Karlsen, N. H. Risebro, and T. Tao Institute for Mathematics
Convergence of operator splitting for the KdV equation H. Holden Norwegian University of Science and Technology Trondheim, Norway Joint work with K.H. Karlsen, N. H. Risebro, and T. Tao Institute for Mathematics
Nonlinear Optics (WiSe 2018/19) Lecture 7: November 30, 2018
 Lecture 7: November 30, 2018") Nonlinear Optics (WiSe 2018/19) Lecture 7: November 30, 2018 7 Third-order nonlinear effects (continued) 7.6 Raman and Brillouin scattering 7.6.1 Focusing 7.6.2 Strong conversion 7.6.3 Stimulated Brillouin
Nonlinear Optics (WiSe 2018/19) Lecture 7: November 30, 2018 7 Third-order nonlinear effects (continued) 7.6 Raman and Brillouin scattering 7.6.1 Focusing 7.6.2 Strong conversion 7.6.3 Stimulated Brillouin
Dark & Bright Solitons in Strongly Repulsive Bose-Einstein Condensate
 Dark & Bright Solitons in Strongly Repulsive Bose-Einstein Condensate Indu Satija, George Mason Univ & National Institute of Standard and Tech ( NIST) collaborator:radha Balakrishnan, Institute of Mathematical
Dark & Bright Solitons in Strongly Repulsive Bose-Einstein Condensate Indu Satija, George Mason Univ & National Institute of Standard and Tech ( NIST) collaborator:radha Balakrishnan, Institute of Mathematical
Soliton Molecules. Fedor Mitschke Universität Rostock, Institut für Physik. Benasque, October
 Soliton Soliton Molecules Molecules and and Optical Optical Rogue Rogue Waves Waves Benasque, October 2014 Fedor Mitschke Universität Rostock, Institut für Physik fedor.mitschke@uni-rostock.de Part II
Soliton Soliton Molecules Molecules and and Optical Optical Rogue Rogue Waves Waves Benasque, October 2014 Fedor Mitschke Universität Rostock, Institut für Physik fedor.mitschke@uni-rostock.de Part II
What we do understand by the notion of soliton or rather solitary wave is a wave prole which is very stable in the following sense
 Introduction to Waves and Solitons What we do understand by the notion of soliton or rather solitary wave is a wave prole which is very stable in the following sense i) It is localized, which means it
Introduction to Waves and Solitons What we do understand by the notion of soliton or rather solitary wave is a wave prole which is very stable in the following sense i) It is localized, which means it
Large-Amplitude Periodic Oscillations in Suspension Bridges
 Large-Amplitude Periodic Oscillations in Suspension Bridges Ludwin Romero and Jesse Kreger April 28, 2014 Ludwin Romero and Jesse Kreger Large-Amplitude Periodic Oscillations in Suspension Bridges April
Large-Amplitude Periodic Oscillations in Suspension Bridges Ludwin Romero and Jesse Kreger April 28, 2014 Ludwin Romero and Jesse Kreger Large-Amplitude Periodic Oscillations in Suspension Bridges April
Large-Amplitude Periodic Oscillations in Suspension Bridges
 Large-Amplitude Periodic Oscillations in Suspension Bridges Ludwin Romero and Jesse Kreger April 24, 2014 Figure 1: The Golden Gate Bridge 1 Contents 1 Introduction 3 2 Beginning Model of a Suspension
Large-Amplitude Periodic Oscillations in Suspension Bridges Ludwin Romero and Jesse Kreger April 24, 2014 Figure 1: The Golden Gate Bridge 1 Contents 1 Introduction 3 2 Beginning Model of a Suspension
Existence of ground states for fourth-order wave equations
 Accepted Manuscript Existence of ground states for fourth-order wave equations Paschalis Karageorgis, P.J. McKenna PII: S0362-546X(10)00167-7 DOI: 10.1016/j.na.2010.03.025 Reference: NA 8226 To appear
Accepted Manuscript Existence of ground states for fourth-order wave equations Paschalis Karageorgis, P.J. McKenna PII: S0362-546X(10)00167-7 DOI: 10.1016/j.na.2010.03.025 Reference: NA 8226 To appear
Numerical Methods Lecture 2 Simultaneous Equations
 Numerical Methods Lecture 2 Simultaneous Equations Topics: matrix operations solving systems of equations pages 58-62 are a repeat of matrix notes. New material begins on page 63. Matrix operations: Mathcad
Numerical Methods Lecture 2 Simultaneous Equations Topics: matrix operations solving systems of equations pages 58-62 are a repeat of matrix notes. New material begins on page 63. Matrix operations: Mathcad
Designing Information Devices and Systems I Spring 2018 Lecture Notes Note Introduction to Linear Algebra the EECS Way
 EECS 16A Designing Information Devices and Systems I Spring 018 Lecture Notes Note 1 1.1 Introduction to Linear Algebra the EECS Way In this note, we will teach the basics of linear algebra and relate
EECS 16A Designing Information Devices and Systems I Spring 018 Lecture Notes Note 1 1.1 Introduction to Linear Algebra the EECS Way In this note, we will teach the basics of linear algebra and relate
Simulating Solitons of the Sine-Gordon Equation using Variational Approximations and Hamiltonian Principles
 Simulating Solitons of the Sine-Gordon Equation using Variational Approximations and Hamiltonian Principles By Evan Foley A SENIOR RESEARCH PAPER PRESENTED TO THE DEPARTMENT OF MATHEMATICS AND COMPUTER
Simulating Solitons of the Sine-Gordon Equation using Variational Approximations and Hamiltonian Principles By Evan Foley A SENIOR RESEARCH PAPER PRESENTED TO THE DEPARTMENT OF MATHEMATICS AND COMPUTER
Designing Information Devices and Systems I Fall 2018 Lecture Notes Note Introduction to Linear Algebra the EECS Way
 EECS 16A Designing Information Devices and Systems I Fall 018 Lecture Notes Note 1 1.1 Introduction to Linear Algebra the EECS Way In this note, we will teach the basics of linear algebra and relate it
EECS 16A Designing Information Devices and Systems I Fall 018 Lecture Notes Note 1 1.1 Introduction to Linear Algebra the EECS Way In this note, we will teach the basics of linear algebra and relate it
Introduction - Motivation. Many phenomena (physical, chemical, biological, etc.) are model by differential equations. f f(x + h) f(x) (x) = lim
 are model by differential equations. f f(x + h) f(x) (x) = lim") Introduction - Motivation Many phenomena (physical, chemical, biological, etc.) are model by differential equations. Recall the definition of the derivative of f(x) f f(x + h) f(x) (x) = lim. h 0 h Its
Introduction - Motivation Many phenomena (physical, chemical, biological, etc.) are model by differential equations. Recall the definition of the derivative of f(x) f f(x + h) f(x) (x) = lim. h 0 h Its
Notes for CS542G (Iterative Solvers for Linear Systems)
") Notes for CS542G (Iterative Solvers for Linear Systems) Robert Bridson November 20, 2007 1 The Basics We re now looking at efficient ways to solve the linear system of equations Ax = b where in this course,
Notes for CS542G (Iterative Solvers for Linear Systems) Robert Bridson November 20, 2007 1 The Basics We re now looking at efficient ways to solve the linear system of equations Ax = b where in this course,
Chapter 1. Linear Equations
 Chapter 1. Linear Equations We ll start our study of linear algebra with linear equations. Lost of parts of mathematics rose out of trying to understand the solutions of different types of equations. Linear
Chapter 1. Linear Equations We ll start our study of linear algebra with linear equations. Lost of parts of mathematics rose out of trying to understand the solutions of different types of equations. Linear
Applied Linear Algebra in Geoscience Using MATLAB
 Applied Linear Algebra in Geoscience Using MATLAB Contents Getting Started Creating Arrays Mathematical Operations with Arrays Using Script Files and Managing Data Two-Dimensional Plots Programming in
Applied Linear Algebra in Geoscience Using MATLAB Contents Getting Started Creating Arrays Mathematical Operations with Arrays Using Script Files and Managing Data Two-Dimensional Plots Programming in
2 Systems of Linear Equations
 2 Systems of Linear Equations A system of equations of the form or is called a system of linear equations. x + 2y = 7 2x y = 4 5p 6q + r = 4 2p + 3q 5r = 7 6p q + 4r = 2 Definition. An equation involving
2 Systems of Linear Equations A system of equations of the form or is called a system of linear equations. x + 2y = 7 2x y = 4 5p 6q + r = 4 2p + 3q 5r = 7 6p q + 4r = 2 Definition. An equation involving
Unit 6: Linear Momentum
 Unit 6: Linear Momentum The concept of linear momentum is closely tied to the concept of force in fact, Newton first defined his Second Law not in terms of mass and acceleration, but in terms of momentum.
Unit 6: Linear Momentum The concept of linear momentum is closely tied to the concept of force in fact, Newton first defined his Second Law not in terms of mass and acceleration, but in terms of momentum.
CS 542G: Conditioning, BLAS, LU Factorization
 CS 542G: Conditioning, BLAS, LU Factorization Robert Bridson September 22, 2008 1 Why some RBF Kernel Functions Fail We derived some sensible RBF kernel functions, like φ(r) = r 2 log r, from basic principles
CS 542G: Conditioning, BLAS, LU Factorization Robert Bridson September 22, 2008 1 Why some RBF Kernel Functions Fail We derived some sensible RBF kernel functions, like φ(r) = r 2 log r, from basic principles
Chapter 6 - Ordinary Differential Equations
 Chapter 6 - Ordinary Differential Equations 7.1 Solving Initial-Value Problems In this chapter, we will be interested in the solution of ordinary differential equations. Ordinary differential equations
Chapter 6 - Ordinary Differential Equations 7.1 Solving Initial-Value Problems In this chapter, we will be interested in the solution of ordinary differential equations. Ordinary differential equations
Slope Fields: Graphing Solutions Without the Solutions
 8 Slope Fields: Graphing Solutions Without the Solutions Up to now, our efforts have been directed mainly towards finding formulas or equations describing solutions to given differential equations. Then,
8 Slope Fields: Graphing Solutions Without the Solutions Up to now, our efforts have been directed mainly towards finding formulas or equations describing solutions to given differential equations. Then,
Partial Differential Equations Summary
 Partial Differential Equations Summary 1. The heat equation Many physical processes are governed by partial differential equations. temperature of a rod. In this chapter, we will examine exactly that.
Partial Differential Equations Summary 1. The heat equation Many physical processes are governed by partial differential equations. temperature of a rod. In this chapter, we will examine exactly that.
Tacoma Narrows and the Gradient Vector
 Tacoma Narrows and the Gradient Vector Ken Huffman May 18, 2005 Abstract The mathematical models that have been proposed to explain the collapse of the Tacoma Narrows Bridge are highly dependent on the
Tacoma Narrows and the Gradient Vector Ken Huffman May 18, 2005 Abstract The mathematical models that have been proposed to explain the collapse of the Tacoma Narrows Bridge are highly dependent on the
Dynamics Final Report
 Dynamics Final Report Sophie Li and Hannah Wilk 1 Abstract We set out to develop a n-rigid body solver in MatLab. We wanted a user to define how many rigid bodies there are, and our system creates the
Dynamics Final Report Sophie Li and Hannah Wilk 1 Abstract We set out to develop a n-rigid body solver in MatLab. We wanted a user to define how many rigid bodies there are, and our system creates the
Some Notes on Linear Algebra
 Some Notes on Linear Algebra prepared for a first course in differential equations Thomas L Scofield Department of Mathematics and Statistics Calvin College 1998 1 The purpose of these notes is to present
Some Notes on Linear Algebra prepared for a first course in differential equations Thomas L Scofield Department of Mathematics and Statistics Calvin College 1998 1 The purpose of these notes is to present
Iterative Methods for Solving A x = b
 Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Dispersion relations, stability and linearization
 Dispersion relations, stability and linearization 1 Dispersion relations Suppose that u(x, t) is a function with domain { < x 0}, and it satisfies a linear, constant coefficient partial differential
Dispersion relations, stability and linearization 1 Dispersion relations Suppose that u(x, t) is a function with domain { < x 0}, and it satisfies a linear, constant coefficient partial differential
[Disclaimer: This is not a complete list of everything you need to know, just some of the topics that gave people difficulty.]
![[Disclaimer: This is not a complete list of everything you need to know, just some of the topics that gave people difficulty.]](/thumbs/82/86615903.jpg "[Disclaimer: This is not a complete list of everything you need to know, just some of the topics that gave people difficulty.]") Math 43 Review Notes [Disclaimer: This is not a complete list of everything you need to know, just some of the topics that gave people difficulty Dot Product If v (v, v, v 3 and w (w, w, w 3, then the
Math 43 Review Notes [Disclaimer: This is not a complete list of everything you need to know, just some of the topics that gave people difficulty Dot Product If v (v, v, v 3 and w (w, w, w 3, then the
LAB 2 - ONE DIMENSIONAL MOTION
 Name Date Partners L02-1 LAB 2 - ONE DIMENSIONAL MOTION OBJECTIVES Slow and steady wins the race. Aesop s fable: The Hare and the Tortoise To learn how to use a motion detector and gain more familiarity
Name Date Partners L02-1 LAB 2 - ONE DIMENSIONAL MOTION OBJECTIVES Slow and steady wins the race. Aesop s fable: The Hare and the Tortoise To learn how to use a motion detector and gain more familiarity
Chapter 0 of Calculus ++, Differential calculus with several variables
 Chapter of Calculus ++, Differential calculus with several variables Background material by Eric A Carlen Professor of Mathematics Georgia Tech Spring 6 c 6 by the author, all rights reserved - Table of
Chapter of Calculus ++, Differential calculus with several variables Background material by Eric A Carlen Professor of Mathematics Georgia Tech Spring 6 c 6 by the author, all rights reserved - Table of
Extreme Values and Positive/ Negative Definite Matrix Conditions
 Extreme Values and Positive/ Negative Definite Matrix Conditions James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University November 8, 016 Outline 1
Extreme Values and Positive/ Negative Definite Matrix Conditions James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University November 8, 016 Outline 1
PS2 Lab 1: Measurement and Uncertainty Supplemental Fall 2013
 Background and Introduction (If you haven t already read the chapters from Taylor posted on the course website, do so now before continuing.) In an experimental setting it is just as important to specify
Background and Introduction (If you haven t already read the chapters from Taylor posted on the course website, do so now before continuing.) In an experimental setting it is just as important to specify
Calculus II. Calculus II tends to be a very difficult course for many students. There are many reasons for this.
 Preface Here are my online notes for my Calculus II course that I teach here at Lamar University. Despite the fact that these are my class notes they should be accessible to anyone wanting to learn Calculus
Preface Here are my online notes for my Calculus II course that I teach here at Lamar University. Despite the fact that these are my class notes they should be accessible to anyone wanting to learn Calculus
Algebra Year 10. Language
 Algebra Year 10 Introduction In Algebra we do Maths with numbers, but some of those numbers are not known. They are represented with letters, and called unknowns, variables or, most formally, literals.
Algebra Year 10 Introduction In Algebra we do Maths with numbers, but some of those numbers are not known. They are represented with letters, and called unknowns, variables or, most formally, literals.
MITOCW ocw-18_02-f07-lec02_220k
 MITOCW ocw-18_02-f07-lec02_220k The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources for free.
MITOCW ocw-18_02-f07-lec02_220k The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources for free.
1 Oscillations MEI Conference 2009
 1 Oscillations MEI Conference 2009 Some Background Information There is a film clip you can get from Youtube of the Tacoma Narrows Bridge called Galloping Gertie. This shows vibrations in the bridge increasing
1 Oscillations MEI Conference 2009 Some Background Information There is a film clip you can get from Youtube of the Tacoma Narrows Bridge called Galloping Gertie. This shows vibrations in the bridge increasing
Figure 1: Doing work on a block by pushing it across the floor.
 Work Let s imagine I have a block which I m pushing across the floor, shown in Figure 1. If I m moving the block at constant velocity, then I know that I have to apply a force to compensate the effects
Work Let s imagine I have a block which I m pushing across the floor, shown in Figure 1. If I m moving the block at constant velocity, then I know that I have to apply a force to compensate the effects
1 GSW Sets of Systems
 1 Often, we have to solve a whole series of sets of simultaneous equations of the form y Ax, all of which have the same matrix A, but each of which has a different known vector y, and a different unknown
1 Often, we have to solve a whole series of sets of simultaneous equations of the form y Ax, all of which have the same matrix A, but each of which has a different known vector y, and a different unknown
DIFFERENTIAL EQUATIONS
 DIFFERENTIAL EQUATIONS Basic Concepts Paul Dawkins Table of Contents Preface... Basic Concepts... 1 Introduction... 1 Definitions... Direction Fields... 8 Final Thoughts...19 007 Paul Dawkins i http://tutorial.math.lamar.edu/terms.aspx
DIFFERENTIAL EQUATIONS Basic Concepts Paul Dawkins Table of Contents Preface... Basic Concepts... 1 Introduction... 1 Definitions... Direction Fields... 8 Final Thoughts...19 007 Paul Dawkins i http://tutorial.math.lamar.edu/terms.aspx
Ordinary Differential Equations
 CHAPTER 8 Ordinary Differential Equations 8.1. Introduction My section 8.1 will cover the material in sections 8.1 and 8.2 in the book. Read the book sections on your own. I don t like the order of things
CHAPTER 8 Ordinary Differential Equations 8.1. Introduction My section 8.1 will cover the material in sections 8.1 and 8.2 in the book. Read the book sections on your own. I don t like the order of things
Getting Started with Communications Engineering. Rows first, columns second. Remember that. R then C. 1
 1 Rows first, columns second. Remember that. R then C. 1 A matrix is a set of real or complex numbers arranged in a rectangular array. They can be any size and shape (provided they are rectangular). A
1 Rows first, columns second. Remember that. R then C. 1 A matrix is a set of real or complex numbers arranged in a rectangular array. They can be any size and shape (provided they are rectangular). A
Numerical Methods Lecture 2 Simultaneous Equations
 CGN 42 - Computer Methods Numerical Methods Lecture 2 Simultaneous Equations Topics: matrix operations solving systems of equations Matrix operations: Adding / subtracting Transpose Multiplication Adding
CGN 42 - Computer Methods Numerical Methods Lecture 2 Simultaneous Equations Topics: matrix operations solving systems of equations Matrix operations: Adding / subtracting Transpose Multiplication Adding
Vector, Matrix, and Tensor Derivatives
 Vector, Matrix, and Tensor Derivatives Erik Learned-Miller The purpose of this document is to help you learn to take derivatives of vectors, matrices, and higher order tensors (arrays with three dimensions
Vector, Matrix, and Tensor Derivatives Erik Learned-Miller The purpose of this document is to help you learn to take derivatives of vectors, matrices, and higher order tensors (arrays with three dimensions
Fundamentals of Linear Algebra. Marcel B. Finan Arkansas Tech University c All Rights Reserved
 Fundamentals of Linear Algebra Marcel B. Finan Arkansas Tech University c All Rights Reserved 2 PREFACE Linear algebra has evolved as a branch of mathematics with wide range of applications to the natural
Fundamentals of Linear Algebra Marcel B. Finan Arkansas Tech University c All Rights Reserved 2 PREFACE Linear algebra has evolved as a branch of mathematics with wide range of applications to the natural
Vibrations 8.1. Amplitude, Period, Frequency, and Phase of Vibrations. 338 MHR Unit 4 Waves
 8.1 Vibrations SECTION Describe and explain amplitude, frequency, and phase of vibration. nalyze and experiment with the components of, and conditions required for, resonance to occur in a vibrating object.
8.1 Vibrations SECTION Describe and explain amplitude, frequency, and phase of vibration. nalyze and experiment with the components of, and conditions required for, resonance to occur in a vibrating object.
TheFourierTransformAndItsApplications-Lecture28
 TheFourierTransformAndItsApplications-Lecture28 Instructor (Brad Osgood):All right. Let me remind you of the exam information as I said last time. I also sent out an announcement to the class this morning
TheFourierTransformAndItsApplications-Lecture28 Instructor (Brad Osgood):All right. Let me remind you of the exam information as I said last time. I also sent out an announcement to the class this morning
Math 307 Learning Goals. March 23, 2010
 Math 307 Learning Goals March 23, 2010 Course Description The course presents core concepts of linear algebra by focusing on applications in Science and Engineering. Examples of applications from recent
Math 307 Learning Goals March 23, 2010 Course Description The course presents core concepts of linear algebra by focusing on applications in Science and Engineering. Examples of applications from recent
12 Lecture 12. Lax pair and Toda lattice
 128 12 Lecture 12. Lax pair and Toda lattice The story in this lecture goes as follows chronologically. Scott-Russel observed (1834) the first solitary wave propagation along the Union Canal, Scotland
128 12 Lecture 12. Lax pair and Toda lattice The story in this lecture goes as follows chronologically. Scott-Russel observed (1834) the first solitary wave propagation along the Union Canal, Scotland
Math (P)Review Part I:
Review Part I:") Lecture 1: Math (P)Review Part I: Linear Algebra Computer Graphics CMU 15-462/15-662, Fall 2017 Homework 0.0 (Due Monday!) Exercises will be a bit harder / more rigorous than what you will do for the rest
Lecture 1: Math (P)Review Part I: Linear Algebra Computer Graphics CMU 15-462/15-662, Fall 2017 Homework 0.0 (Due Monday!) Exercises will be a bit harder / more rigorous than what you will do for the rest
Chapter 2. Solving Systems of Equations. 2.1 Gaussian elimination
 Chapter 2 Solving Systems of Equations A large number of real life applications which are resolved through mathematical modeling will end up taking the form of the following very simple looking matrix
Chapter 2 Solving Systems of Equations A large number of real life applications which are resolved through mathematical modeling will end up taking the form of the following very simple looking matrix
KdV soliton solutions to a model of hepatitis C virus evolution
 KdV soliton solutions to a model of hepatitis C virus evolution T. Telksnys, Z. Navickas, M. Ragulskis Kaunas University of Technology Differential Equations and Applications, Brno 2017 September 6th,
KdV soliton solutions to a model of hepatitis C virus evolution T. Telksnys, Z. Navickas, M. Ragulskis Kaunas University of Technology Differential Equations and Applications, Brno 2017 September 6th,
Corso di Laurea in LOGOPEDIA FISICA ACUSTICA MOTO OSCILLATORIO
 Corso di Laurea in LOGOPEDIA FISICA ACUSTICA MOTO OSCILLATORIO Fabio Romanelli Department of Mathematics & Geosciences University of Trieste Email: romanel@units.it What is an Oscillation? Oscillation
Corso di Laurea in LOGOPEDIA FISICA ACUSTICA MOTO OSCILLATORIO Fabio Romanelli Department of Mathematics & Geosciences University of Trieste Email: romanel@units.it What is an Oscillation? Oscillation
Chapter 1: January 26 January 30
 Chapter : January 26 January 30 Section.7: Inequalities As a diagnostic quiz, I want you to go through the first ten problems of the Chapter Test on page 32. These will test your knowledge of Sections.
Chapter : January 26 January 30 Section.7: Inequalities As a diagnostic quiz, I want you to go through the first ten problems of the Chapter Test on page 32. These will test your knowledge of Sections.
Queens College, CUNY, Department of Computer Science Numerical Methods CSCI 361 / 761 Spring 2018 Instructor: Dr. Sateesh Mane.
 Queens College, CUNY, Department of Computer Science Numerical Methods CSCI 361 / 761 Spring 2018 Instructor: Dr. Sateesh Mane c Sateesh R. Mane 2018 3 Lecture 3 3.1 General remarks March 4, 2018 This
Queens College, CUNY, Department of Computer Science Numerical Methods CSCI 361 / 761 Spring 2018 Instructor: Dr. Sateesh Mane c Sateesh R. Mane 2018 3 Lecture 3 3.1 General remarks March 4, 2018 This
Physics Motion Math. (Read objectives on screen.)
") Physics 302 - Motion Math (Read objectives on screen.) Welcome back. When we ended the last program, your teacher gave you some motion graphs to interpret. For each section, you were to describe the motion
Physics 302 - Motion Math (Read objectives on screen.) Welcome back. When we ended the last program, your teacher gave you some motion graphs to interpret. For each section, you were to describe the motion
Linear Functions, Equations, and Inequalities
 CHAPTER Linear Functions, Equations, and Inequalities Inventory is the list of items that businesses stock in stores and warehouses to supply customers. Businesses in the United States keep about.5 trillion
CHAPTER Linear Functions, Equations, and Inequalities Inventory is the list of items that businesses stock in stores and warehouses to supply customers. Businesses in the United States keep about.5 trillion
The General Form of Linearized Exact Solution for the KdV Equation by the Simplest Equation Method
 Applied and Computational Mathematics 015; 4(5): 335-341 Published online August 16 015 (http://www.sciencepublishinggroup.com/j/acm) doi: 10.11648/j.acm.0150405.11 ISSN: 38-5605 (Print); ISSN: 38-5613
Applied and Computational Mathematics 015; 4(5): 335-341 Published online August 16 015 (http://www.sciencepublishinggroup.com/j/acm) doi: 10.11648/j.acm.0150405.11 ISSN: 38-5605 (Print); ISSN: 38-5613
Waves in a Shock Tube
 Waves in a Shock Tube Ivan Christov c February 5, 005 Abstract. This paper discusses linear-wave solutions and simple-wave solutions to the Navier Stokes equations for an inviscid and compressible fluid
Waves in a Shock Tube Ivan Christov c February 5, 005 Abstract. This paper discusses linear-wave solutions and simple-wave solutions to the Navier Stokes equations for an inviscid and compressible fluid
Designing Information Devices and Systems I Spring 2017 Babak Ayazifar, Vladimir Stojanovic Homework 2
 EECS 16A Designing Information Devices and Systems I Spring 2017 Babak Ayazifar, Vladimir Stojanovic Homework 2 This homework is due February 6, 2017, at 23:59. Self-grades are due February 9, 2017, at
EECS 16A Designing Information Devices and Systems I Spring 2017 Babak Ayazifar, Vladimir Stojanovic Homework 2 This homework is due February 6, 2017, at 23:59. Self-grades are due February 9, 2017, at
Computational Techniques Prof. Sreenivas Jayanthi. Department of Chemical Engineering Indian institute of Technology, Madras
 Computational Techniques Prof. Sreenivas Jayanthi. Department of Chemical Engineering Indian institute of Technology, Madras Module No. # 05 Lecture No. # 24 Gauss-Jordan method L U decomposition method
Computational Techniques Prof. Sreenivas Jayanthi. Department of Chemical Engineering Indian institute of Technology, Madras Module No. # 05 Lecture No. # 24 Gauss-Jordan method L U decomposition method
Mechanics of materials is one of the first application-based engineering
 In This Chapter Chapter 1 Predicting Behavior with Mechanics of Materials Defining mechanics of materials Introducing stresses and strains Using mechanics of materials to aid in design Mechanics of materials
In This Chapter Chapter 1 Predicting Behavior with Mechanics of Materials Defining mechanics of materials Introducing stresses and strains Using mechanics of materials to aid in design Mechanics of materials
MATH 320, WEEK 7: Matrices, Matrix Operations
 MATH 320, WEEK 7: Matrices, Matrix Operations 1 Matrices We have introduced ourselves to the notion of the grid-like coefficient matrix as a short-hand coefficient place-keeper for performing Gaussian
MATH 320, WEEK 7: Matrices, Matrix Operations 1 Matrices We have introduced ourselves to the notion of the grid-like coefficient matrix as a short-hand coefficient place-keeper for performing Gaussian
NOTES ON LINEAR ALGEBRA CLASS HANDOUT
 NOTES ON LINEAR ALGEBRA CLASS HANDOUT ANTHONY S. MAIDA CONTENTS 1. Introduction 2 2. Basis Vectors 2 3. Linear Transformations 2 3.1. Example: Rotation Transformation 3 4. Matrix Multiplication and Function
NOTES ON LINEAR ALGEBRA CLASS HANDOUT ANTHONY S. MAIDA CONTENTS 1. Introduction 2 2. Basis Vectors 2 3. Linear Transformations 2 3.1. Example: Rotation Transformation 3 4. Matrix Multiplication and Function
MITOCW 6. Standing Waves Part I
 MITOCW 6. Standing Waves Part I The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources for free.
MITOCW 6. Standing Waves Part I The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources for free.
MITOCW MITRES2_002S10nonlinear_lec05_300k-mp4
 MITOCW MITRES2_002S10nonlinear_lec05_300k-mp4 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources
MITOCW MITRES2_002S10nonlinear_lec05_300k-mp4 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources
MATH3203 Lecture 1 Mathematical Modelling and ODEs
 MATH3203 Lecture 1 Mathematical Modelling and ODEs Dion Weatherley Earth Systems Science Computational Centre, University of Queensland February 27, 2006 Abstract Contents 1 Mathematical Modelling 2 1.1
MATH3203 Lecture 1 Mathematical Modelling and ODEs Dion Weatherley Earth Systems Science Computational Centre, University of Queensland February 27, 2006 Abstract Contents 1 Mathematical Modelling 2 1.1
Midterm 1 Review. Distance = (x 1 x 0 ) 2 + (y 1 y 0 ) 2.
 2 + (y 1 y 0 ) 2.") Midterm 1 Review Comments about the midterm The midterm will consist of five questions and will test on material from the first seven lectures the material given below. No calculus either single variable
Midterm 1 Review Comments about the midterm The midterm will consist of five questions and will test on material from the first seven lectures the material given below. No calculus either single variable
Getting Started with Communications Engineering
 1 Linear algebra is the algebra of linear equations: the term linear being used in the same sense as in linear functions, such as: which is the equation of a straight line. y ax c (0.1) Of course, if we
1 Linear algebra is the algebra of linear equations: the term linear being used in the same sense as in linear functions, such as: which is the equation of a straight line. y ax c (0.1) Of course, if we
Example: 2x y + 3z = 1 5y 6z = 0 x + 4z = 7. Definition: Elementary Row Operations. Example: Type I swap rows 1 and 3
 Linear Algebra Row Reduced Echelon Form Techniques for solving systems of linear equations lie at the heart of linear algebra. In high school we learn to solve systems with or variables using elimination
Linear Algebra Row Reduced Echelon Form Techniques for solving systems of linear equations lie at the heart of linear algebra. In high school we learn to solve systems with or variables using elimination
Linear Algebra Section 2.6 : LU Decomposition Section 2.7 : Permutations and transposes Wednesday, February 13th Math 301 Week #4
 Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
What Every Programmer Should Know About Floating-Point Arithmetic DRAFT. Last updated: November 3, Abstract
 What Every Programmer Should Know About Floating-Point Arithmetic Last updated: November 3, 2014 Abstract The article provides simple answers to the common recurring questions of novice programmers about
What Every Programmer Should Know About Floating-Point Arithmetic Last updated: November 3, 2014 Abstract The article provides simple answers to the common recurring questions of novice programmers about
Force, Motion, and Sound
 Force, Motion, and Sound Physics 160, Spring 2006 Galileo (1564-1642) 1642) Isaac Newton (1643-1727) 1727) Uniform Motion x = 1cm 2cm 3cm 4cm 5cm 6cm 7cm 8cm O t = 1s 2s 3s 4s 5s 6s 7s 8s This picture
Force, Motion, and Sound Physics 160, Spring 2006 Galileo (1564-1642) 1642) Isaac Newton (1643-1727) 1727) Uniform Motion x = 1cm 2cm 3cm 4cm 5cm 6cm 7cm 8cm O t = 1s 2s 3s 4s 5s 6s 7s 8s This picture
Differential Equations
 This document was written and copyrighted by Paul Dawkins. Use of this document and its online version is governed by the Terms and Conditions of Use located at. The online version of this document is
This document was written and copyrighted by Paul Dawkins. Use of this document and its online version is governed by the Terms and Conditions of Use located at. The online version of this document is
from Euclid to Einstein
 WorkBook 2. Space from Euclid to Einstein Roy McWeeny Professore Emerito di Chimica Teorica, Università di Pisa, Pisa (Italy) A Pari New Learning Publication Book 2 in the Series WorkBooks in Science (Last
WorkBook 2. Space from Euclid to Einstein Roy McWeeny Professore Emerito di Chimica Teorica, Università di Pisa, Pisa (Italy) A Pari New Learning Publication Book 2 in the Series WorkBooks in Science (Last
Computational Techniques Prof. Dr. Niket Kaisare Department of Chemical Engineering Indian Institute of Technology, Madras
 Computational Techniques Prof. Dr. Niket Kaisare Department of Chemical Engineering Indian Institute of Technology, Madras Module No. # 07 Lecture No. # 05 Ordinary Differential Equations (Refer Slide
Computational Techniques Prof. Dr. Niket Kaisare Department of Chemical Engineering Indian Institute of Technology, Madras Module No. # 07 Lecture No. # 05 Ordinary Differential Equations (Refer Slide
AIMS Exercise Set # 1
 AIMS Exercise Set #. Determine the form of the single precision floating point arithmetic used in the computers at AIMS. What is the largest number that can be accurately represented? What is the smallest
AIMS Exercise Set #. Determine the form of the single precision floating point arithmetic used in the computers at AIMS. What is the largest number that can be accurately represented? What is the smallest
Algebraic Equations. 2.0 Introduction. Nonsingular versus Singular Sets of Equations. A set of linear algebraic equations looks like this:
 Chapter 2. 2.0 Introduction Solution of Linear Algebraic Equations A set of linear algebraic equations looks like this: a 11 x 1 + a 12 x 2 + a 13 x 3 + +a 1N x N =b 1 a 21 x 1 + a 22 x 2 + a 23 x 3 +
Chapter 2. 2.0 Introduction Solution of Linear Algebraic Equations A set of linear algebraic equations looks like this: a 11 x 1 + a 12 x 2 + a 13 x 3 + +a 1N x N =b 1 a 21 x 1 + a 22 x 2 + a 23 x 3 +
An Introduction to Numerical Methods for Differential Equations. Janet Peterson
 An Introduction to Numerical Methods for Differential Equations Janet Peterson Fall 2015 2 Chapter 1 Introduction Differential equations arise in many disciplines such as engineering, mathematics, sciences
An Introduction to Numerical Methods for Differential Equations Janet Peterson Fall 2015 2 Chapter 1 Introduction Differential equations arise in many disciplines such as engineering, mathematics, sciences
Part 1. The simple harmonic oscillator and the wave equation
 Part 1 The simple harmonic oscillator and the wave equation In the first part of the course we revisit the simple harmonic oscillator, previously discussed in di erential equations class. We use the discussion
Part 1 The simple harmonic oscillator and the wave equation In the first part of the course we revisit the simple harmonic oscillator, previously discussed in di erential equations class. We use the discussion
MAE 323: Chapter 6. Structural Models
 Common element types for structural analyis: oplane stress/strain, Axisymmetric obeam, truss,spring oplate/shell elements o3d solid ospecial: Usually used for contact or other constraints What you need
Common element types for structural analyis: oplane stress/strain, Axisymmetric obeam, truss,spring oplate/shell elements o3d solid ospecial: Usually used for contact or other constraints What you need
Gravity Pre-Lab 1. Why do you need an inclined plane to measure the effects due to gravity?
 Lab Exercise: Gravity (Report) Your Name & Your Lab Partner s Name Due Date Gravity Pre-Lab 1. Why do you need an inclined plane to measure the effects due to gravity? 2. What are several advantage of
Lab Exercise: Gravity (Report) Your Name & Your Lab Partner s Name Due Date Gravity Pre-Lab 1. Why do you need an inclined plane to measure the effects due to gravity? 2. What are several advantage of
Tong Sun Department of Mathematics and Statistics Bowling Green State University, Bowling Green, OH
 Consistency & Numerical Smoothing Error Estimation An Alternative of the Lax-Richtmyer Theorem Tong Sun Department of Mathematics and Statistics Bowling Green State University, Bowling Green, OH 43403
Consistency & Numerical Smoothing Error Estimation An Alternative of the Lax-Richtmyer Theorem Tong Sun Department of Mathematics and Statistics Bowling Green State University, Bowling Green, OH 43403
Chapter 7. Optimization and Minimum Principles. 7.1 Two Fundamental Examples. Least Squares
 Chapter 7 Optimization and Minimum Principles 7 Two Fundamental Examples Within the universe of applied mathematics, optimization is often a world of its own There are occasional expeditions to other worlds
Chapter 7 Optimization and Minimum Principles 7 Two Fundamental Examples Within the universe of applied mathematics, optimization is often a world of its own There are occasional expeditions to other worlds
Mon Jan Improved acceleration models: linear and quadratic drag forces. Announcements: Warm-up Exercise:
 Math 2250-004 Week 4 notes We will not necessarily finish the material from a given day's notes on that day. We may also add or subtract some material as the week progresses, but these notes represent
Math 2250-004 Week 4 notes We will not necessarily finish the material from a given day's notes on that day. We may also add or subtract some material as the week progresses, but these notes represent
Designing Information Devices and Systems I Fall 2015 Anant Sahai, Ali Niknejad Homework 2. This homework is due September 14, 2015, at Noon.
 EECS 16A Designing Information Devices and Systems I Fall 2015 Anant Sahai, Ali Niknejad Homework 2 This homework is due September 14, 2015, at Noon. Submission Format Your homework submission should consist
EECS 16A Designing Information Devices and Systems I Fall 2015 Anant Sahai, Ali Niknejad Homework 2 This homework is due September 14, 2015, at Noon. Submission Format Your homework submission should consist
Finite Mathematics : A Business Approach
 Finite Mathematics : A Business Approach Dr. Brian Travers and Prof. James Lampes Second Edition Cover Art by Stephanie Oxenford Additional Editing by John Gambino Contents What You Should Already Know
Finite Mathematics : A Business Approach Dr. Brian Travers and Prof. James Lampes Second Edition Cover Art by Stephanie Oxenford Additional Editing by John Gambino Contents What You Should Already Know
Matrix-Exponentials. September 7, dx dt = ax. x(t) = e at x(0)
 = e at x(0)") Matrix-Exponentials September 7, 207 In [4]: using PyPlot INFO: Recompiling stale cache file /Users/stevenj/.julia/lib/v0.5/LaTeXStrings.ji for module LaTeXString Review: Solving ODEs via eigenvectors
Matrix-Exponentials September 7, 207 In [4]: using PyPlot INFO: Recompiling stale cache file /Users/stevenj/.julia/lib/v0.5/LaTeXStrings.ji for module LaTeXString Review: Solving ODEs via eigenvectors
Introduction to Partial Differential Equations
 Introduction to Partial Differential Equations Partial differential equations arise in a number of physical problems, such as fluid flow, heat transfer, solid mechanics and biological processes. These
Introduction to Partial Differential Equations Partial differential equations arise in a number of physical problems, such as fluid flow, heat transfer, solid mechanics and biological processes. These
Resonance and response
 Chapter 2 Resonance and response Last updated September 20, 2008 In this section of the course we begin with a very simple system a mass hanging from a spring and see how some remarkable ideas emerge.
Chapter 2 Resonance and response Last updated September 20, 2008 In this section of the course we begin with a very simple system a mass hanging from a spring and see how some remarkable ideas emerge.
Rolle s Theorem. The theorem states that if f (a) = f (b), then there is at least one number c between a and b at which f ' (c) = 0.
 = f (b), then there is at least one number c between a and b at which f ' (c) = 0.") Rolle s Theorem Rolle's Theorem guarantees that there will be at least one extreme value in the interior of a closed interval, given that certain conditions are satisfied. As with most of the theorems
Rolle s Theorem Rolle's Theorem guarantees that there will be at least one extreme value in the interior of a closed interval, given that certain conditions are satisfied. As with most of the theorems
Physics with Matlab and Mathematica Exercise #1 28 Aug 2012
 Physics with Matlab and Mathematica Exercise #1 28 Aug 2012 You can work this exercise in either matlab or mathematica. Your choice. A simple harmonic oscillator is constructed from a mass m and a spring
Physics with Matlab and Mathematica Exercise #1 28 Aug 2012 You can work this exercise in either matlab or mathematica. Your choice. A simple harmonic oscillator is constructed from a mass m and a spring
MITOCW MITRES18_005S10_DiffEqnsMotion_300k_512kb-mp4
 MITOCW MITRES18_005S10_DiffEqnsMotion_300k_512kb-mp4 PROFESSOR: OK, this lecture, this day, is differential equations day. I just feel even though these are not on the BC exams, that we've got everything
MITOCW MITRES18_005S10_DiffEqnsMotion_300k_512kb-mp4 PROFESSOR: OK, this lecture, this day, is differential equations day. I just feel even though these are not on the BC exams, that we've got everything
EGR 1301 Introduction to Static Analysis
 Slide 1 EGR 1301 Introduction to Static Analysis Presentation adapted from Distance Learning / Online Instructional Presentation Originally created by Mr. Dick Campbell Presented by: Departments of Engineering
Slide 1 EGR 1301 Introduction to Static Analysis Presentation adapted from Distance Learning / Online Instructional Presentation Originally created by Mr. Dick Campbell Presented by: Departments of Engineering
Algebra Year 9. Language
 Algebra Year 9 Introduction In Algebra we do Maths with numbers, but some of those numbers are not known. They are represented with letters, and called unknowns, variables or, most formally, literals.
Algebra Year 9 Introduction In Algebra we do Maths with numbers, but some of those numbers are not known. They are represented with letters, and called unknowns, variables or, most formally, literals.
Jim Lambers MAT 610 Summer Session Lecture 2 Notes
 Jim Lambers MAT 610 Summer Session 2009-10 Lecture 2 Notes These notes correspond to Sections 2.2-2.4 in the text. Vector Norms Given vectors x and y of length one, which are simply scalars x and y, the
Jim Lambers MAT 610 Summer Session 2009-10 Lecture 2 Notes These notes correspond to Sections 2.2-2.4 in the text. Vector Norms Given vectors x and y of length one, which are simply scalars x and y, the