Applied Linear Algebra in Geoscience Using MATLAB
|
|
|
- Kelly Brown
- 5 years ago
- Views:
Transcription

1 Applied Linear Algebra in Geoscience Using MATLAB
2 Contents Getting Started Creating Arrays Mathematical Operations with Arrays Using Script Files and Managing Data Two-Dimensional Plots Programming in MATLAB User-Defined Functions and Function Files Polynomials, Curve Fitting, and Interpolation Applications in Numerical Analysis Three-Dimensional Plots Symbolic Math Matrices Linear equations Determinants Eigenvalues and eigenvectors Orthogonal vectors and matrices Vector and matrix norms Gaussian elimination and the LU dec. Linear system applications Gram-Schmidt decomposition The singular value decomposition Least-squares problems Linear Independence Basis of a Subspace The Rank of a Matrix Implementing the QR factorization The algebraic eigenvalue problem
3 Norm L1, L2 and inf It is helpful to view the unit sphere of a norm, the unit spheres for the -, 1-, and 2-norm have equations
4 LU Decomposition We practiced the process of solving a non-singular linear system Ax = b using Gaussian elimination. We formed the augmented matrix A b and applied the elementary row operations as below, to reduce A to upper-triangular form. 1. Multiplying a row by a scalar. 2. Subtracting a multiple of one row from another 3. Exchanging two rows Following this step, back substitution computed the solution. In many applications where linear systems appear, one needs to solve Ax = b for many different vectors b. Most of the work in Gaussian elimination is applying row operations to arrive at the uppertriangular matrix. If we need to solve several different systems with the same A, then we would like to avoid repeating the steps of Gaussian elimination on A for every different b. This can be accomplished by the LU decomposition, which in effect records the steps of Gaussian elimination. Since Gaussian elimination is used so often, the algorithm must be stable. Unfortunately, this is not true, and we must add an operation termed partial pivoting.
5 LU Decomposition The first step of Gaussian elimination is to use a 11 = 1 as the pivot and subtract 2 times the first row from the second and 3 times the first row from the third Record these actions by placing the multipliers 2 and 3 into the entries they made zero. In order to make it clear that we are recording multipliers and not elements of A, put the entries in parentheses. This leads to: Thus, we see that A is the product of the lower triangular L and the upper triangular U. When a matrix can be written as a product of simpler matrices, we call that a decomposition and this one we call the LU decomposition.
6 Using LU To Solve Equations Factor A into the product of L and U: First solve Ly = b. This finds y = Ux. Now solve Ux = y to find x. Each of these solution steps is simple. First, the system Ly is lower triangular. Next, the system Ux = y is upper triangular.
7 Using LU To Solve Equations
8 Using LU To Solve Equations
9 Gaussian Elimination With Partial Pivoting Gaussian elimination can produce extremely bad results under certain circumstances; in fact, the results can be completely wrong!!! Consider the matrix, and use three-digit arithmetic. There is only one step required to produce the LU decomposition. Use the multiplier 2/ The problem arose when we divided by a small pivot element and obtained a large multiplier. The large multiplier resulted in the addition of a very large number to a much smaller number. The result was loss of any contribution from the small number. In our three-digit arithmetic, the 1 is lost, and the result is Now compute LU to get which is disastrously different from A!

10 Using LU To Solve Equations There is a good solution to this problem. When choosing the pivot element on the diagonal at position aii, locate the element in column i at or below the diagonal that is largest in magnitude, say aji, i j n. If j i, interchange row j with row i, and then the multipliers, a ji /a ii, satisfy a ji /a ii 1, i + 1 j n, and we avoid multiplying a row by a large number and losing precision. We call this Gaussian elimination with partial pivoting (GEPP). Of course, this is not the original matrix A, but A with its two rows swapped (permuted). If we use GEPP, then an LU decomposition for A consists of three matrices P, L, and U such that
11 Using LU To Solve Equations P is a permutation matrix, also called the pivot matrix. Start with P = I, and swap rows i and j of the permutation matrix whenever rows i and j are swapped during GEPP. For instance, would be the permutation matrix if the second and third rows of A are interchanged during pivoting. Pivot row = 1. Swap rows 1 and 3, and permute P. Do not interchange rows of L until arriving at the pivot in row 2, column 2 Apply the pivot element, and add multipliers to L. Pivot row = 2. Swap rows 2 and 3. Permute P and L.
12 Using LU To Solve Equations Apply the pivot element and update L. The final results are NOTE: Even if a row interchange occurs when dealing with column 1, do not interchange the corresponding rows of L until moving to column 2. Think of it this way. The matrix A after a row swap defines the starting configuration. The elements in the first column of L correspond to the multipliers after the row interchange involving pivot position (1, 1),if any.
13 A good reason for computing L and U is that the cubic LU decomposition algorithm allows us to repeatedly solve Ax = b for many b s without having to re-compute either L or U
14 Eq. with One Variable Numerical methods are commonly used for solving mathematical problems that are formulated in science (and engineering) where it is difficult or impossible to obtain exact solutions A solution to the equation (also called a root) is a numerical value of x that satisfies the equation (graphically, crosses or touches the x axis) If such a value does not exist or is difficult to determine, a numerical solution can be determined by finding an x that is very close to the solution. This is done by the iterative process, where in each iteration we determine a value of x that is closer to the solution.
 Determine the solution of the above equation Lets to plot this fun. first")
15 Eq. with One Variable NOTE: The function has to be written in a standard form. EX) Determine the solution of the above equation Lets to plot this fun. first
16 Max or Min of a Function The fzero command finds zeros of a function only where the function crosses the x axis. The command does not find a zero at points where the function touches but does not cross the X axis. The fzero command can also be used to find the value of x where the function has a specific value. This is done by translating the function up or down 0.1 In many applications there is a need to determine the local minimum or maximum of a function In calculus the value of x that corresponds to a local minimum or maximum is determined by finding the zero of the derivative of the function. The value of y is determined by substituting the x into the function.


17 ODEs Ex) Local min Abs. min Notice that the fminbnd command gives the local minimum.


18 Numerical Integration The fminbnd command can also be used to find the maximum of a function. This is done by multiplying the function by 1 and finding the minimum. Calculating area and volume, velocity from acceleration, and work from force and displacement are just a few examples where integrals are used. In calculus courses the integrand (the quantity to be integrated) is usually a function. In applications of science and engineering the integrand can be a function or a set of data points. A definite integral In numerical integration the total area is obtained by dividing the area into small sections, calculating the area of each section, and adding Them up.
19 Numerical Integration Various numerical methods have been developed for this purpose. The difference between the methods is in the way that the area is divided into sections and the method by which the area of each section is calculated. In MATLAB The quad and quadl commands are used for integration when f(x) is a function, and trapz is used when f(x) is given by data points. The quad command, uses the adaptive Simpson method of integration. The quadl command uses the adaptive Lobatto method, which can be more efficient for high accuracies and smooth integrals. The function must be written for an argument x that is a vector (use element-by-element operations) such that it calculates the value of the function for each element of x.
20 ODEs make sure that the function does not have a vertical asymptote between a and b. Ex) Use numerical integration to calculate the following integral: The trapz command can be used for integrating a function that is given as data points. It uses the numerical trapezoidal method of integration where x and y are vectors with the x and y coordinates of the points, respectively. The two vectors must be of the same length.
21 ODEs Differential equations play a crucial role in science and engineering since they are in the foundation of virtually every physical phenomenon. However, only a limited number of differential equations can be solved analytically. Numerical methods, on the other hand, can result in an approximate solution to almost any equation. An ordinary differential equation (ODE) is an equation that contains an independent variable, a dependent variable, and derivatives of the dependent variable. x and y are the independent and dependent variables, respectively. A solution is a function y=f(x) that satisfies the equation. In general, many functions can satisfy a given ODE, and more information is required for determining the solution of a specific problem.
 or an anonymous function.")

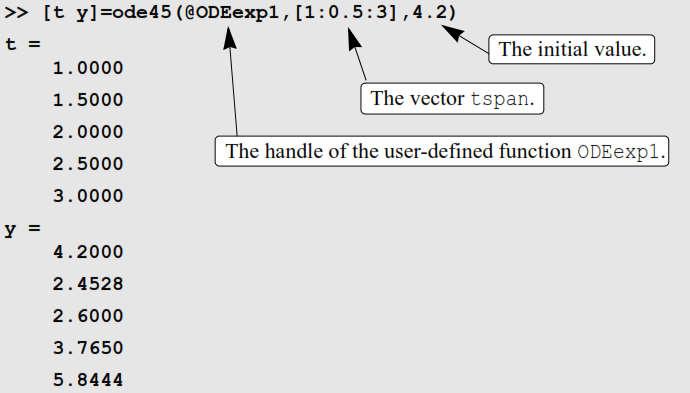
22 ODEs Step 1: Write the problem in a standard form. Step 2: Create a user-defined function (in a function file) or an anonymous function. The ODE to be solved has to be written as a user-defined function or as an anonymous function. Step 3: Select a method of solution. lists seven ODE solver commands, which are MATLAB built-in functions that can be used for solving a first order ODE. Step 4: Solve the ODE. A vector that specifies the interval of the solution. The vector must have at least two elements but can have more.
23 ODEs In general, the solvers can be divided into two groups according to their ability to solve stiff problems and according to whether they use on-step or multistep methods Stiff problems are ones that include fast and slowly changing components and require small time steps in their solution One-step solvers use information from one point to obtain a solution at the next point. Multistep solvers use information from several previous points to find the solution at the next point. It is impossible to know ahead of time which solver is the most appropriate for a specific problem. A suggestion is to first try ode45, which gives good results for many problems. If a solution is not obtained because the problem is stiff, trying the solver ode15s is suggested.
24 ODEs
25 Examples The ideal gas equation relates the volume (V in L), temperature (T in K), pressure (P in atm), and the amount of gas (number of moles n) by: where R = (L atm)/(mol K) is the gas constant. The van der Waals equation gives the relationship between these quantities for a real gas by where a and b are constants that are specific for each gas. Use the fzero function to calculate the volume of 2 mol CO2 at temperature of 50 C, and pressure of 6 atm.

26 ODEs In order for the script and function files to work correctly, the variables P, T, n, a, b, and R are declared global. To estimate the amount of water that flows in a river during a year, a section of the river is made to have a rectangular cross section as shown. In the beginning of every month (starting at January 1st) the height h of the water and the speed v of the water flow are measured. The first day of measurement is taken as 1, and the last day which is January 1st of the next year is day 366. The following data was measured:
, at each data point is obtained by multiplying the water speed by the width and height of the cross-sectional area of the water that flows in the")
27 ODEs Use the data to calculate the flow rate, and then integrate the flow rate to obtain an estimate of the total amount of water that flows in the river during a year. The flow rate, Q (volume of water per second), at each data point is obtained by multiplying the water speed by the width and height of the cross-sectional area of the water that flows in the channel: The total amount of water that flows is estimated by the integral:
(Mathematical Operations with Arrays) Applied Linear Algebra in Geoscience Using MATLAB
 Applied Linear Algebra in Geoscience Using MATLAB") Applied Linear Algebra in Geoscience Using MATLAB (Mathematical Operations with Arrays) Contents Getting Started Matrices Creating Arrays Linear equations Mathematical Operations with Arrays Using Script
Applied Linear Algebra in Geoscience Using MATLAB (Mathematical Operations with Arrays) Contents Getting Started Matrices Creating Arrays Linear equations Mathematical Operations with Arrays Using Script
Applied Linear Algebra in Geoscience Using MATLAB
 Applied Linear Algebra in Geoscience Using MATLAB Contents Getting Started Creating Arrays Mathematical Operations with Arrays Using Script Files and Managing Data Two-Dimensional Plots Programming in
Applied Linear Algebra in Geoscience Using MATLAB Contents Getting Started Creating Arrays Mathematical Operations with Arrays Using Script Files and Managing Data Two-Dimensional Plots Programming in
(Linear equations) Applied Linear Algebra in Geoscience Using MATLAB
 Applied Linear Algebra in Geoscience Using MATLAB") Applied Linear Algebra in Geoscience Using MATLAB (Linear equations) Contents Getting Started Creating Arrays Mathematical Operations with Arrays Using Script Files and Managing Data Two-Dimensional Plots
Applied Linear Algebra in Geoscience Using MATLAB (Linear equations) Contents Getting Started Creating Arrays Mathematical Operations with Arrays Using Script Files and Managing Data Two-Dimensional Plots
Applied Linear Algebra in Geoscience Using MATLAB
 Applied Linear Algebra in Geoscience Using MATLAB Contents Getting Started Creating Arrays Mathematical Operations with Arrays Using Script Files and Managing Data Two-Dimensional Plots Programming in
Applied Linear Algebra in Geoscience Using MATLAB Contents Getting Started Creating Arrays Mathematical Operations with Arrays Using Script Files and Managing Data Two-Dimensional Plots Programming in
Linear Algebra Section 2.6 : LU Decomposition Section 2.7 : Permutations and transposes Wednesday, February 13th Math 301 Week #4
 Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
There are six more problems on the next two pages
 Math 435 bg & bu: Topics in linear algebra Summer 25 Final exam Wed., 8/3/5. Justify all your work to receive full credit. Name:. Let A 3 2 5 Find a permutation matrix P, a lower triangular matrix L with
Math 435 bg & bu: Topics in linear algebra Summer 25 Final exam Wed., 8/3/5. Justify all your work to receive full credit. Name:. Let A 3 2 5 Find a permutation matrix P, a lower triangular matrix L with
Numerical Linear Algebra
 Numerical Linear Algebra Direct Methods Philippe B. Laval KSU Fall 2017 Philippe B. Laval (KSU) Linear Systems: Direct Solution Methods Fall 2017 1 / 14 Introduction The solution of linear systems is one
Numerical Linear Algebra Direct Methods Philippe B. Laval KSU Fall 2017 Philippe B. Laval (KSU) Linear Systems: Direct Solution Methods Fall 2017 1 / 14 Introduction The solution of linear systems is one
Matrix decompositions
 Matrix decompositions How can we solve Ax = b? 1 Linear algebra Typical linear system of equations : x 1 x +x = x 1 +x +9x = 0 x 1 +x x = The variables x 1, x, and x only appear as linear terms (no powers
Matrix decompositions How can we solve Ax = b? 1 Linear algebra Typical linear system of equations : x 1 x +x = x 1 +x +9x = 0 x 1 +x x = The variables x 1, x, and x only appear as linear terms (no powers
Linear Algebra Linear Algebra : Matrix decompositions Monday, February 11th Math 365 Week #4
 Linear Algebra Linear Algebra : Matrix decompositions Monday, February 11th Math Week # 1 Saturday, February 1, 1 Linear algebra Typical linear system of equations : x 1 x +x = x 1 +x +9x = 0 x 1 +x x
Linear Algebra Linear Algebra : Matrix decompositions Monday, February 11th Math Week # 1 Saturday, February 1, 1 Linear algebra Typical linear system of equations : x 1 x +x = x 1 +x +9x = 0 x 1 +x x
Matrix decompositions
 Matrix decompositions Zdeněk Dvořák May 19, 2015 Lemma 1 (Schur decomposition). If A is a symmetric real matrix, then there exists an orthogonal matrix Q and a diagonal matrix D such that A = QDQ T. The
Matrix decompositions Zdeněk Dvořák May 19, 2015 Lemma 1 (Schur decomposition). If A is a symmetric real matrix, then there exists an orthogonal matrix Q and a diagonal matrix D such that A = QDQ T. The
Linear Systems of n equations for n unknowns
 Linear Systems of n equations for n unknowns In many application problems we want to find n unknowns, and we have n linear equations Example: Find x,x,x such that the following three equations hold: x
Linear Systems of n equations for n unknowns In many application problems we want to find n unknowns, and we have n linear equations Example: Find x,x,x such that the following three equations hold: x
Solution of Linear Equations
 Solution of Linear Equations (Com S 477/577 Notes) Yan-Bin Jia Sep 7, 07 We have discussed general methods for solving arbitrary equations, and looked at the special class of polynomial equations A subclass
Solution of Linear Equations (Com S 477/577 Notes) Yan-Bin Jia Sep 7, 07 We have discussed general methods for solving arbitrary equations, and looked at the special class of polynomial equations A subclass
Matrix decompositions
 Matrix decompositions How can we solve Ax = b? 1 Linear algebra Typical linear system of equations : x 1 x +x = x 1 +x +9x = 0 x 1 +x x = The variables x 1, x, and x only appear as linear terms (no powers
Matrix decompositions How can we solve Ax = b? 1 Linear algebra Typical linear system of equations : x 1 x +x = x 1 +x +9x = 0 x 1 +x x = The variables x 1, x, and x only appear as linear terms (no powers
Conceptual Questions for Review
 Conceptual Questions for Review Chapter 1 1.1 Which vectors are linear combinations of v = (3, 1) and w = (4, 3)? 1.2 Compare the dot product of v = (3, 1) and w = (4, 3) to the product of their lengths.
Conceptual Questions for Review Chapter 1 1.1 Which vectors are linear combinations of v = (3, 1) and w = (4, 3)? 1.2 Compare the dot product of v = (3, 1) and w = (4, 3) to the product of their lengths.
LECTURE NOTES ELEMENTARY NUMERICAL METHODS. Eusebius Doedel
 LECTURE NOTES on ELEMENTARY NUMERICAL METHODS Eusebius Doedel TABLE OF CONTENTS Vector and Matrix Norms 1 Banach Lemma 20 The Numerical Solution of Linear Systems 25 Gauss Elimination 25 Operation Count
LECTURE NOTES on ELEMENTARY NUMERICAL METHODS Eusebius Doedel TABLE OF CONTENTS Vector and Matrix Norms 1 Banach Lemma 20 The Numerical Solution of Linear Systems 25 Gauss Elimination 25 Operation Count
Gaussian Elimination and Back Substitution
 Jim Lambers MAT 610 Summer Session 2009-10 Lecture 4 Notes These notes correspond to Sections 31 and 32 in the text Gaussian Elimination and Back Substitution The basic idea behind methods for solving
Jim Lambers MAT 610 Summer Session 2009-10 Lecture 4 Notes These notes correspond to Sections 31 and 32 in the text Gaussian Elimination and Back Substitution The basic idea behind methods for solving
MATH 3511 Lecture 1. Solving Linear Systems 1
 MATH 3511 Lecture 1 Solving Linear Systems 1 Dmitriy Leykekhman Spring 2012 Goals Review of basic linear algebra Solution of simple linear systems Gaussian elimination D Leykekhman - MATH 3511 Introduction
MATH 3511 Lecture 1 Solving Linear Systems 1 Dmitriy Leykekhman Spring 2012 Goals Review of basic linear algebra Solution of simple linear systems Gaussian elimination D Leykekhman - MATH 3511 Introduction
Numerical Linear Algebra
 Chapter 3 Numerical Linear Algebra We review some techniques used to solve Ax = b where A is an n n matrix, and x and b are n 1 vectors (column vectors). We then review eigenvalues and eigenvectors and
Chapter 3 Numerical Linear Algebra We review some techniques used to solve Ax = b where A is an n n matrix, and x and b are n 1 vectors (column vectors). We then review eigenvalues and eigenvectors and
CS227-Scientific Computing. Lecture 4: A Crash Course in Linear Algebra
 CS227-Scientific Computing Lecture 4: A Crash Course in Linear Algebra Linear Transformation of Variables A common phenomenon: Two sets of quantities linearly related: y = 3x + x 2 4x 3 y 2 = 2.7x 2 x
CS227-Scientific Computing Lecture 4: A Crash Course in Linear Algebra Linear Transformation of Variables A common phenomenon: Two sets of quantities linearly related: y = 3x + x 2 4x 3 y 2 = 2.7x 2 x
1 Number Systems and Errors 1
 Contents 1 Number Systems and Errors 1 1.1 Introduction................................ 1 1.2 Number Representation and Base of Numbers............. 1 1.2.1 Normalized Floating-point Representation...........
Contents 1 Number Systems and Errors 1 1.1 Introduction................................ 1 1.2 Number Representation and Base of Numbers............. 1 1.2.1 Normalized Floating-point Representation...........
ANSWERS. E k E 2 E 1 A = B
 MATH 7- Final Exam Spring ANSWERS Essay Questions points Define an Elementary Matrix Display the fundamental matrix multiply equation which summarizes a sequence of swap, combination and multiply operations,
MATH 7- Final Exam Spring ANSWERS Essay Questions points Define an Elementary Matrix Display the fundamental matrix multiply equation which summarizes a sequence of swap, combination and multiply operations,
Review of matrices. Let m, n IN. A rectangle of numbers written like A =
 Review of matrices Let m, n IN. A rectangle of numbers written like a 11 a 12... a 1n a 21 a 22... a 2n A =...... a m1 a m2... a mn where each a ij IR is called a matrix with m rows and n columns or an
Review of matrices Let m, n IN. A rectangle of numbers written like a 11 a 12... a 1n a 21 a 22... a 2n A =...... a m1 a m2... a mn where each a ij IR is called a matrix with m rows and n columns or an
Scientific Computing
 Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Direct Methods for Solving Linear Systems. Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le
 Direct Methods for Solving Linear Systems Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le 1 Overview General Linear Systems Gaussian Elimination Triangular Systems The LU Factorization
Direct Methods for Solving Linear Systems Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le 1 Overview General Linear Systems Gaussian Elimination Triangular Systems The LU Factorization
Numerical Methods - Numerical Linear Algebra
 Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Cheat Sheet for MATH461
 Cheat Sheet for MATH46 Here is the stuff you really need to remember for the exams Linear systems Ax = b Problem: We consider a linear system of m equations for n unknowns x,,x n : For a given matrix A
Cheat Sheet for MATH46 Here is the stuff you really need to remember for the exams Linear systems Ax = b Problem: We consider a linear system of m equations for n unknowns x,,x n : For a given matrix A
The Solution of Linear Systems AX = B
 Chapter 2 The Solution of Linear Systems AX = B 21 Upper-triangular Linear Systems We will now develop the back-substitution algorithm, which is useful for solving a linear system of equations that has
Chapter 2 The Solution of Linear Systems AX = B 21 Upper-triangular Linear Systems We will now develop the back-substitution algorithm, which is useful for solving a linear system of equations that has
This can be accomplished by left matrix multiplication as follows: I
 1 Numerical Linear Algebra 11 The LU Factorization Recall from linear algebra that Gaussian elimination is a method for solving linear systems of the form Ax = b, where A R m n and bran(a) In this method
1 Numerical Linear Algebra 11 The LU Factorization Recall from linear algebra that Gaussian elimination is a method for solving linear systems of the form Ax = b, where A R m n and bran(a) In this method
MAC1105-College Algebra. Chapter 5-Systems of Equations & Matrices
 MAC05-College Algebra Chapter 5-Systems of Equations & Matrices 5. Systems of Equations in Two Variables Solving Systems of Two Linear Equations/ Two-Variable Linear Equations A system of equations is
MAC05-College Algebra Chapter 5-Systems of Equations & Matrices 5. Systems of Equations in Two Variables Solving Systems of Two Linear Equations/ Two-Variable Linear Equations A system of equations is
Solving Linear Systems of Equations
 November 6, 2013 Introduction The type of problems that we have to solve are: Solve the system: A x = B, where a 11 a 1N a 12 a 2N A =.. a 1N a NN x = x 1 x 2. x N B = b 1 b 2. b N To find A 1 (inverse
November 6, 2013 Introduction The type of problems that we have to solve are: Solve the system: A x = B, where a 11 a 1N a 12 a 2N A =.. a 1N a NN x = x 1 x 2. x N B = b 1 b 2. b N To find A 1 (inverse
The value of a problem is not so much coming up with the answer as in the ideas and attempted ideas it forces on the would be solver I.N.
 Math 410 Homework Problems In the following pages you will find all of the homework problems for the semester. Homework should be written out neatly and stapled and turned in at the beginning of class
Math 410 Homework Problems In the following pages you will find all of the homework problems for the semester. Homework should be written out neatly and stapled and turned in at the beginning of class
CME 302: NUMERICAL LINEAR ALGEBRA FALL 2005/06 LECTURE 6
 CME 302: NUMERICAL LINEAR ALGEBRA FALL 2005/06 LECTURE 6 GENE H GOLUB Issues with Floating-point Arithmetic We conclude our discussion of floating-point arithmetic by highlighting two issues that frequently
CME 302: NUMERICAL LINEAR ALGEBRA FALL 2005/06 LECTURE 6 GENE H GOLUB Issues with Floating-point Arithmetic We conclude our discussion of floating-point arithmetic by highlighting two issues that frequently
CPE 310: Numerical Analysis for Engineers
 CPE 310: Numerical Analysis for Engineers Chapter 2: Solving Sets of Equations Ahmed Tamrawi Copyright notice: care has been taken to use only those web images deemed by the instructor to be in the public
CPE 310: Numerical Analysis for Engineers Chapter 2: Solving Sets of Equations Ahmed Tamrawi Copyright notice: care has been taken to use only those web images deemed by the instructor to be in the public
Math 102, Winter Final Exam Review. Chapter 1. Matrices and Gaussian Elimination
 Math 0, Winter 07 Final Exam Review Chapter. Matrices and Gaussian Elimination { x + x =,. Different forms of a system of linear equations. Example: The x + 4x = 4. [ ] [ ] [ ] vector form (or the column
Math 0, Winter 07 Final Exam Review Chapter. Matrices and Gaussian Elimination { x + x =,. Different forms of a system of linear equations. Example: The x + 4x = 4. [ ] [ ] [ ] vector form (or the column
Linear Algebra March 16, 2019
 Linear Algebra March 16, 2019 2 Contents 0.1 Notation................................ 4 1 Systems of linear equations, and matrices 5 1.1 Systems of linear equations..................... 5 1.2 Augmented
Linear Algebra March 16, 2019 2 Contents 0.1 Notation................................ 4 1 Systems of linear equations, and matrices 5 1.1 Systems of linear equations..................... 5 1.2 Augmented
MTH5112 Linear Algebra I MTH5212 Applied Linear Algebra (2017/2018)
") MTH5112 Linear Algebra I MTH5212 Applied Linear Algebra (2017/2018) COURSEWORK 3 SOLUTIONS Exercise ( ) 1. (a) Write A = (a ij ) n n and B = (b ij ) n n. Since A and B are diagonal, we have a ij = 0 and
MTH5112 Linear Algebra I MTH5212 Applied Linear Algebra (2017/2018) COURSEWORK 3 SOLUTIONS Exercise ( ) 1. (a) Write A = (a ij ) n n and B = (b ij ) n n. Since A and B are diagonal, we have a ij = 0 and
L2-7 Some very stylish matrix decompositions for solving Ax = b 10 Oct 2015
 L-7 Some very stylish matrix decompositions for solving Ax = b 10 Oct 015 Marty McFly: Wait a minute, Doc. Ah... Are you telling me you built a time machine... out of a DeLorean? Doc Brown: The way I see
L-7 Some very stylish matrix decompositions for solving Ax = b 10 Oct 015 Marty McFly: Wait a minute, Doc. Ah... Are you telling me you built a time machine... out of a DeLorean? Doc Brown: The way I see
Laboratory #3: Linear Algebra. Contents. Grace Yung
 Laboratory #3: Linear Algebra Grace Yung Contents List of Problems. Introduction. Objectives.2 Prerequisites 2. Linear Systems 2. What is a Matrix 2.2 Quick Review 2.3 Gaussian Elimination 2.3. Decomposition
Laboratory #3: Linear Algebra Grace Yung Contents List of Problems. Introduction. Objectives.2 Prerequisites 2. Linear Systems 2. What is a Matrix 2.2 Quick Review 2.3 Gaussian Elimination 2.3. Decomposition
Numerical Methods for Engineers. and Scientists. Applications using MATLAB. An Introduction with. Vish- Subramaniam. Third Edition. Amos Gilat.
 Numerical Methods for Engineers An Introduction with and Scientists Applications using MATLAB Third Edition Amos Gilat Vish- Subramaniam Department of Mechanical Engineering The Ohio State University Wiley
Numerical Methods for Engineers An Introduction with and Scientists Applications using MATLAB Third Edition Amos Gilat Vish- Subramaniam Department of Mechanical Engineering The Ohio State University Wiley
MODEL ANSWERS TO THE FIRST QUIZ. 1. (18pts) (i) Give the definition of a m n matrix. A m n matrix with entries in a field F is a function
 (i) Give the definition of a m n matrix. A m n matrix with entries in a field F is a function") MODEL ANSWERS TO THE FIRST QUIZ 1. (18pts) (i) Give the definition of a m n matrix. A m n matrix with entries in a field F is a function A: I J F, where I is the set of integers between 1 and m and J is
MODEL ANSWERS TO THE FIRST QUIZ 1. (18pts) (i) Give the definition of a m n matrix. A m n matrix with entries in a field F is a function A: I J F, where I is the set of integers between 1 and m and J is
CHAPTER 6. Direct Methods for Solving Linear Systems
 CHAPTER 6 Direct Methods for Solving Linear Systems. Introduction A direct method for approximating the solution of a system of n linear equations in n unknowns is one that gives the exact solution to
CHAPTER 6 Direct Methods for Solving Linear Systems. Introduction A direct method for approximating the solution of a system of n linear equations in n unknowns is one that gives the exact solution to
MATRICES. a m,1 a m,n A =
 MATRICES Matrices are rectangular arrays of real or complex numbers With them, we define arithmetic operations that are generalizations of those for real and complex numbers The general form a matrix of
MATRICES Matrices are rectangular arrays of real or complex numbers With them, we define arithmetic operations that are generalizations of those for real and complex numbers The general form a matrix of
Math 520 Exam 2 Topic Outline Sections 1 3 (Xiao/Dumas/Liaw) Spring 2008
 Spring 2008") Math 520 Exam 2 Topic Outline Sections 1 3 (Xiao/Dumas/Liaw) Spring 2008 Exam 2 will be held on Tuesday, April 8, 7-8pm in 117 MacMillan What will be covered The exam will cover material from the lectures
Math 520 Exam 2 Topic Outline Sections 1 3 (Xiao/Dumas/Liaw) Spring 2008 Exam 2 will be held on Tuesday, April 8, 7-8pm in 117 MacMillan What will be covered The exam will cover material from the lectures
2.1 Gaussian Elimination
 2. Gaussian Elimination A common problem encountered in numerical models is the one in which there are n equations and n unknowns. The following is a description of the Gaussian elimination method for
2. Gaussian Elimination A common problem encountered in numerical models is the one in which there are n equations and n unknowns. The following is a description of the Gaussian elimination method for
lecture 2 and 3: algorithms for linear algebra
 lecture 2 and 3: algorithms for linear algebra STAT 545: Introduction to computational statistics Vinayak Rao Department of Statistics, Purdue University August 27, 2018 Solving a system of linear equations
lecture 2 and 3: algorithms for linear algebra STAT 545: Introduction to computational statistics Vinayak Rao Department of Statistics, Purdue University August 27, 2018 Solving a system of linear equations
MATH 1120 (LINEAR ALGEBRA 1), FINAL EXAM FALL 2011 SOLUTIONS TO PRACTICE VERSION
, FINAL EXAM FALL 2011 SOLUTIONS TO PRACTICE VERSION") MATH (LINEAR ALGEBRA ) FINAL EXAM FALL SOLUTIONS TO PRACTICE VERSION Problem (a) For each matrix below (i) find a basis for its column space (ii) find a basis for its row space (iii) determine whether
MATH (LINEAR ALGEBRA ) FINAL EXAM FALL SOLUTIONS TO PRACTICE VERSION Problem (a) For each matrix below (i) find a basis for its column space (ii) find a basis for its row space (iii) determine whether
Next topics: Solving systems of linear equations
 Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
Matrix Factorization Reading: Lay 2.5
 Matrix Factorization Reading: Lay 2.5 October, 20 You have seen that if we know the inverse A of a matrix A, we can easily solve the equation Ax = b. Solving a large number of equations Ax = b, Ax 2 =
Matrix Factorization Reading: Lay 2.5 October, 20 You have seen that if we know the inverse A of a matrix A, we can easily solve the equation Ax = b. Solving a large number of equations Ax = b, Ax 2 =
Linear Algebra, part 3 QR and SVD
 Linear Algebra, part 3 QR and SVD Anna-Karin Tornberg Mathematical Models, Analysis and Simulation Fall semester, 2012 Going back to least squares (Section 1.4 from Strang, now also see section 5.2). We
Linear Algebra, part 3 QR and SVD Anna-Karin Tornberg Mathematical Models, Analysis and Simulation Fall semester, 2012 Going back to least squares (Section 1.4 from Strang, now also see section 5.2). We
1 9/5 Matrices, vectors, and their applications
 1 9/5 Matrices, vectors, and their applications Algebra: study of objects and operations on them. Linear algebra: object: matrices and vectors. operations: addition, multiplication etc. Algorithms/Geometric
1 9/5 Matrices, vectors, and their applications Algebra: study of objects and operations on them. Linear algebra: object: matrices and vectors. operations: addition, multiplication etc. Algorithms/Geometric
MAT 343 Laboratory 3 The LU factorization
 In this laboratory session we will learn how to MAT 343 Laboratory 3 The LU factorization 1. Find the LU factorization of a matrix using elementary matrices 2. Use the MATLAB command lu to find the LU
In this laboratory session we will learn how to MAT 343 Laboratory 3 The LU factorization 1. Find the LU factorization of a matrix using elementary matrices 2. Use the MATLAB command lu to find the LU
GAUSSIAN ELIMINATION AND LU DECOMPOSITION (SUPPLEMENT FOR MA511)
") GAUSSIAN ELIMINATION AND LU DECOMPOSITION (SUPPLEMENT FOR MA511) D. ARAPURA Gaussian elimination is the go to method for all basic linear classes including this one. We go summarize the main ideas. 1.
GAUSSIAN ELIMINATION AND LU DECOMPOSITION (SUPPLEMENT FOR MA511) D. ARAPURA Gaussian elimination is the go to method for all basic linear classes including this one. We go summarize the main ideas. 1.
Applied Linear Algebra
 Applied Linear Algebra Peter J. Olver School of Mathematics University of Minnesota Minneapolis, MN 55455 olver@math.umn.edu http://www.math.umn.edu/ olver Chehrzad Shakiban Department of Mathematics University
Applied Linear Algebra Peter J. Olver School of Mathematics University of Minnesota Minneapolis, MN 55455 olver@math.umn.edu http://www.math.umn.edu/ olver Chehrzad Shakiban Department of Mathematics University
Example Linear Algebra Competency Test
 Example Linear Algebra Competency Test The 4 questions below are a combination of True or False, multiple choice, fill in the blank, and computations involving matrices and vectors. In the latter case,
Example Linear Algebra Competency Test The 4 questions below are a combination of True or False, multiple choice, fill in the blank, and computations involving matrices and vectors. In the latter case,
Linear Equations in Linear Algebra
 1 Linear Equations in Linear Algebra 1.1 SYSTEMS OF LINEAR EQUATIONS LINEAR EQUATION x 1,, x n A linear equation in the variables equation that can be written in the form a 1 x 1 + a 2 x 2 + + a n x n
1 Linear Equations in Linear Algebra 1.1 SYSTEMS OF LINEAR EQUATIONS LINEAR EQUATION x 1,, x n A linear equation in the variables equation that can be written in the form a 1 x 1 + a 2 x 2 + + a n x n
MAT Linear Algebra Collection of sample exams
 MAT 342 - Linear Algebra Collection of sample exams A-x. (0 pts Give the precise definition of the row echelon form. 2. ( 0 pts After performing row reductions on the augmented matrix for a certain system
MAT 342 - Linear Algebra Collection of sample exams A-x. (0 pts Give the precise definition of the row echelon form. 2. ( 0 pts After performing row reductions on the augmented matrix for a certain system
Review Questions REVIEW QUESTIONS 71
 REVIEW QUESTIONS 71 MATLAB, is [42]. For a comprehensive treatment of error analysis and perturbation theory for linear systems and many other problems in linear algebra, see [126, 241]. An overview of
REVIEW QUESTIONS 71 MATLAB, is [42]. For a comprehensive treatment of error analysis and perturbation theory for linear systems and many other problems in linear algebra, see [126, 241]. An overview of
Gaussian Elimination without/with Pivoting and Cholesky Decomposition
 Gaussian Elimination without/with Pivoting and Cholesky Decomposition Gaussian Elimination WITHOUT pivoting Notation: For a matrix A R n n we define for k {,,n} the leading principal submatrix a a k A
Gaussian Elimination without/with Pivoting and Cholesky Decomposition Gaussian Elimination WITHOUT pivoting Notation: For a matrix A R n n we define for k {,,n} the leading principal submatrix a a k A
TMA4125 Matematikk 4N Spring 2017
 Norwegian University of Science and Technology Institutt for matematiske fag TMA15 Matematikk N Spring 17 Solutions to exercise set 1 1 We begin by writing the system as the augmented matrix.139.38.3 6.
Norwegian University of Science and Technology Institutt for matematiske fag TMA15 Matematikk N Spring 17 Solutions to exercise set 1 1 We begin by writing the system as the augmented matrix.139.38.3 6.
Preliminary Examination, Numerical Analysis, August 2016
 Preliminary Examination, Numerical Analysis, August 2016 Instructions: This exam is closed books and notes. The time allowed is three hours and you need to work on any three out of questions 1-4 and any
Preliminary Examination, Numerical Analysis, August 2016 Instructions: This exam is closed books and notes. The time allowed is three hours and you need to work on any three out of questions 1-4 and any
Solving linear equations with Gaussian Elimination (I)
") Term Projects Solving linear equations with Gaussian Elimination The QR Algorithm for Symmetric Eigenvalue Problem The QR Algorithm for The SVD Quasi-Newton Methods Solving linear equations with Gaussian
Term Projects Solving linear equations with Gaussian Elimination The QR Algorithm for Symmetric Eigenvalue Problem The QR Algorithm for The SVD Quasi-Newton Methods Solving linear equations with Gaussian
Introduction to Applied Linear Algebra with MATLAB
 Sigam Series in Applied Mathematics Volume 7 Rizwan Butt Introduction to Applied Linear Algebra with MATLAB Heldermann Verlag Contents Number Systems and Errors 1 1.1 Introduction 1 1.2 Number Representation
Sigam Series in Applied Mathematics Volume 7 Rizwan Butt Introduction to Applied Linear Algebra with MATLAB Heldermann Verlag Contents Number Systems and Errors 1 1.1 Introduction 1 1.2 Number Representation
MATH 2030: ASSIGNMENT 4 SOLUTIONS
 MATH 23: ASSIGNMENT 4 SOLUTIONS More on the LU factorization Q.: pg 96, q 24. Find the P t LU factorization of the matrix 2 A = 3 2 2 A.. By interchanging row and row 4 we get a matrix that may be easily
MATH 23: ASSIGNMENT 4 SOLUTIONS More on the LU factorization Q.: pg 96, q 24. Find the P t LU factorization of the matrix 2 A = 3 2 2 A.. By interchanging row and row 4 we get a matrix that may be easily
Math 344 Lecture # Linear Systems
 Math 344 Lecture #12 2.7 Linear Systems Through a choice of bases S and T for finite dimensional vector spaces V (with dimension n) and W (with dimension m), a linear equation L(v) = w becomes the linear
Math 344 Lecture #12 2.7 Linear Systems Through a choice of bases S and T for finite dimensional vector spaces V (with dimension n) and W (with dimension m), a linear equation L(v) = w becomes the linear
A Brief Outline of Math 355
 A Brief Outline of Math 355 Lecture 1 The geometry of linear equations; elimination with matrices A system of m linear equations with n unknowns can be thought of geometrically as m hyperplanes intersecting
A Brief Outline of Math 355 Lecture 1 The geometry of linear equations; elimination with matrices A system of m linear equations with n unknowns can be thought of geometrically as m hyperplanes intersecting
Fundamentals of Engineering Analysis (650163)
") Philadelphia University Faculty of Engineering Communications and Electronics Engineering Fundamentals of Engineering Analysis (6563) Part Dr. Omar R Daoud Matrices: Introduction DEFINITION A matrix is
Philadelphia University Faculty of Engineering Communications and Electronics Engineering Fundamentals of Engineering Analysis (6563) Part Dr. Omar R Daoud Matrices: Introduction DEFINITION A matrix is
MATH 240 Spring, Chapter 1: Linear Equations and Matrices
 MATH 240 Spring, 2006 Chapter Summaries for Kolman / Hill, Elementary Linear Algebra, 8th Ed. Sections 1.1 1.6, 2.1 2.2, 3.2 3.8, 4.3 4.5, 5.1 5.3, 5.5, 6.1 6.5, 7.1 7.2, 7.4 DEFINITIONS Chapter 1: Linear
MATH 240 Spring, 2006 Chapter Summaries for Kolman / Hill, Elementary Linear Algebra, 8th Ed. Sections 1.1 1.6, 2.1 2.2, 3.2 3.8, 4.3 4.5, 5.1 5.3, 5.5, 6.1 6.5, 7.1 7.2, 7.4 DEFINITIONS Chapter 1: Linear
Chapter 4. Solving Systems of Equations. Chapter 4
 Solving Systems of Equations 3 Scenarios for Solutions There are three general situations we may find ourselves in when attempting to solve systems of equations: 1 The system could have one unique solution.
Solving Systems of Equations 3 Scenarios for Solutions There are three general situations we may find ourselves in when attempting to solve systems of equations: 1 The system could have one unique solution.
homogeneous 71 hyperplane 10 hyperplane 34 hyperplane 69 identity map 171 identity map 186 identity map 206 identity matrix 110 identity matrix 45
 address 12 adjoint matrix 118 alternating 112 alternating 203 angle 159 angle 33 angle 60 area 120 associative 180 augmented matrix 11 axes 5 Axiom of Choice 153 basis 178 basis 210 basis 74 basis test
address 12 adjoint matrix 118 alternating 112 alternating 203 angle 159 angle 33 angle 60 area 120 associative 180 augmented matrix 11 axes 5 Axiom of Choice 153 basis 178 basis 210 basis 74 basis test
1 Multiply Eq. E i by λ 0: (λe i ) (E i ) 2 Multiply Eq. E j by λ and add to Eq. E i : (E i + λe j ) (E i )
 (E i ) 2 Multiply Eq. E j by λ and add to Eq. E i : (E i + λe j ) (E i )") Direct Methods for Linear Systems Chapter Direct Methods for Solving Linear Systems Per-Olof Persson persson@berkeleyedu Department of Mathematics University of California, Berkeley Math 18A Numerical
Direct Methods for Linear Systems Chapter Direct Methods for Solving Linear Systems Per-Olof Persson persson@berkeleyedu Department of Mathematics University of California, Berkeley Math 18A Numerical
Glossary of Linear Algebra Terms. Prepared by Vince Zaccone For Campus Learning Assistance Services at UCSB
 Glossary of Linear Algebra Terms Basis (for a subspace) A linearly independent set of vectors that spans the space Basic Variable A variable in a linear system that corresponds to a pivot column in the
Glossary of Linear Algebra Terms Basis (for a subspace) A linearly independent set of vectors that spans the space Basic Variable A variable in a linear system that corresponds to a pivot column in the
Applied Linear Algebra
 Applied Linear Algebra Gábor P. Nagy and Viktor Vígh University of Szeged Bolyai Institute Winter 2014 1 / 262 Table of contents I 1 Introduction, review Complex numbers Vectors and matrices Determinants
Applied Linear Algebra Gábor P. Nagy and Viktor Vígh University of Szeged Bolyai Institute Winter 2014 1 / 262 Table of contents I 1 Introduction, review Complex numbers Vectors and matrices Determinants
Linear Algebra review Powers of a diagonalizable matrix Spectral decomposition
 Linear Algebra review Powers of a diagonalizable matrix Spectral decomposition Prof. Tesler Math 283 Fall 2016 Also see the separate version of this with Matlab and R commands. Prof. Tesler Diagonalizing
Linear Algebra review Powers of a diagonalizable matrix Spectral decomposition Prof. Tesler Math 283 Fall 2016 Also see the separate version of this with Matlab and R commands. Prof. Tesler Diagonalizing
Linear Algebra Practice Problems
 Math 7, Professor Ramras Linear Algebra Practice Problems () Consider the following system of linear equations in the variables x, y, and z, in which the constants a and b are real numbers. x y + z = a
Math 7, Professor Ramras Linear Algebra Practice Problems () Consider the following system of linear equations in the variables x, y, and z, in which the constants a and b are real numbers. x y + z = a
NUMERICAL METHODS USING MATLAB
 NUMERICAL METHODS USING MATLAB Dr John Penny George Lindfield Department of Mechanical Engineering, Aston University ELLIS HORWOOD NEW YORK LONDON TORONTO SYDNEY TOKYO SINGAPORE Preface 1 An introduction
NUMERICAL METHODS USING MATLAB Dr John Penny George Lindfield Department of Mechanical Engineering, Aston University ELLIS HORWOOD NEW YORK LONDON TORONTO SYDNEY TOKYO SINGAPORE Preface 1 An introduction
Linear Algebra review Powers of a diagonalizable matrix Spectral decomposition
 Linear Algebra review Powers of a diagonalizable matrix Spectral decomposition Prof. Tesler Math 283 Fall 2018 Also see the separate version of this with Matlab and R commands. Prof. Tesler Diagonalizing
Linear Algebra review Powers of a diagonalizable matrix Spectral decomposition Prof. Tesler Math 283 Fall 2018 Also see the separate version of this with Matlab and R commands. Prof. Tesler Diagonalizing
IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET
 IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET This is a (not quite comprehensive) list of definitions and theorems given in Math 1553. Pay particular attention to the ones in red. Study Tip For each
IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET This is a (not quite comprehensive) list of definitions and theorems given in Math 1553. Pay particular attention to the ones in red. Study Tip For each
Lecture 1 Systems of Linear Equations and Matrices
 Lecture 1 Systems of Linear Equations and Matrices Math 19620 Outline of Course Linear Equations and Matrices Linear Transformations, Inverses Bases, Linear Independence, Subspaces Abstract Vector Spaces
Lecture 1 Systems of Linear Equations and Matrices Math 19620 Outline of Course Linear Equations and Matrices Linear Transformations, Inverses Bases, Linear Independence, Subspaces Abstract Vector Spaces
Relationships Between Planes
 Relationships Between Planes Definition: consistent (system of equations) A system of equations is consistent if there exists one (or more than one) solution that satisfies the system. System 1: {, System
Relationships Between Planes Definition: consistent (system of equations) A system of equations is consistent if there exists one (or more than one) solution that satisfies the system. System 1: {, System
Introduction to Matrices
 POLS 704 Introduction to Matrices Introduction to Matrices. The Cast of Characters A matrix is a rectangular array (i.e., a table) of numbers. For example, 2 3 X 4 5 6 (4 3) 7 8 9 0 0 0 Thismatrix,with4rowsand3columns,isoforder
POLS 704 Introduction to Matrices Introduction to Matrices. The Cast of Characters A matrix is a rectangular array (i.e., a table) of numbers. For example, 2 3 X 4 5 6 (4 3) 7 8 9 0 0 0 Thismatrix,with4rowsand3columns,isoforder
Contents. 1 Vectors, Lines and Planes 1. 2 Gaussian Elimination Matrices Vector Spaces and Subspaces 124
 Matrices Math 220 Copyright 2016 Pinaki Das This document is freely redistributable under the terms of the GNU Free Documentation License For more information, visit http://wwwgnuorg/copyleft/fdlhtml Contents
Matrices Math 220 Copyright 2016 Pinaki Das This document is freely redistributable under the terms of the GNU Free Documentation License For more information, visit http://wwwgnuorg/copyleft/fdlhtml Contents
MATHEMATICS FOR COMPUTER VISION WEEK 2 LINEAR SYSTEMS. Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year
 1 MATHEMATICS FOR COMPUTER VISION WEEK 2 LINEAR SYSTEMS Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year 2013-14 OUTLINE OF WEEK 2 Linear Systems and solutions Systems of linear
1 MATHEMATICS FOR COMPUTER VISION WEEK 2 LINEAR SYSTEMS Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year 2013-14 OUTLINE OF WEEK 2 Linear Systems and solutions Systems of linear
Math 4A Notes. Written by Victoria Kala Last updated June 11, 2017
 Math 4A Notes Written by Victoria Kala vtkala@math.ucsb.edu Last updated June 11, 2017 Systems of Linear Equations A linear equation is an equation that can be written in the form a 1 x 1 + a 2 x 2 +...
Math 4A Notes Written by Victoria Kala vtkala@math.ucsb.edu Last updated June 11, 2017 Systems of Linear Equations A linear equation is an equation that can be written in the form a 1 x 1 + a 2 x 2 +...
MATH 315 Linear Algebra Homework #1 Assigned: August 20, 2018
 Homework #1 Assigned: August 20, 2018 Review the following subjects involving systems of equations and matrices from Calculus II. Linear systems of equations Converting systems to matrix form Pivot entry
Homework #1 Assigned: August 20, 2018 Review the following subjects involving systems of equations and matrices from Calculus II. Linear systems of equations Converting systems to matrix form Pivot entry
IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET
 IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET This is a (not quite comprehensive) list of definitions and theorems given in Math 1553. Pay particular attention to the ones in red. Study Tip For each
IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET This is a (not quite comprehensive) list of definitions and theorems given in Math 1553. Pay particular attention to the ones in red. Study Tip For each
lecture 3 and 4: algorithms for linear algebra
 lecture 3 and 4: algorithms for linear algebra STAT 545: Introduction to computational statistics Vinayak Rao Department of Statistics, Purdue University August 30, 2016 Solving a system of linear equations
lecture 3 and 4: algorithms for linear algebra STAT 545: Introduction to computational statistics Vinayak Rao Department of Statistics, Purdue University August 30, 2016 Solving a system of linear equations
3 QR factorization revisited
 LINEAR ALGEBRA: NUMERICAL METHODS. Version: August 2, 2000 30 3 QR factorization revisited Now we can explain why A = QR factorization is much better when using it to solve Ax = b than the A = LU factorization
LINEAR ALGEBRA: NUMERICAL METHODS. Version: August 2, 2000 30 3 QR factorization revisited Now we can explain why A = QR factorization is much better when using it to solve Ax = b than the A = LU factorization
4 Elementary matrices, continued
 4 Elementary matrices, continued We have identified 3 types of row operations and their corresponding elementary matrices. To repeat the recipe: These matrices are constructed by performing the given row
4 Elementary matrices, continued We have identified 3 types of row operations and their corresponding elementary matrices. To repeat the recipe: These matrices are constructed by performing the given row
MATH 310, REVIEW SHEET 2
 MATH 310, REVIEW SHEET 2 These notes are a very short summary of the key topics in the book (and follow the book pretty closely). You should be familiar with everything on here, but it s not comprehensive,
MATH 310, REVIEW SHEET 2 These notes are a very short summary of the key topics in the book (and follow the book pretty closely). You should be familiar with everything on here, but it s not comprehensive,
Linear Algebra Primer
 Linear Algebra Primer David Doria daviddoria@gmail.com Wednesday 3 rd December, 2008 Contents Why is it called Linear Algebra? 4 2 What is a Matrix? 4 2. Input and Output.....................................
Linear Algebra Primer David Doria daviddoria@gmail.com Wednesday 3 rd December, 2008 Contents Why is it called Linear Algebra? 4 2 What is a Matrix? 4 2. Input and Output.....................................
Numerical Analysis Preliminary Exam 10 am to 1 pm, August 20, 2018
 Numerical Analysis Preliminary Exam 1 am to 1 pm, August 2, 218 Instructions. You have three hours to complete this exam. Submit solutions to four (and no more) of the following six problems. Please start
Numerical Analysis Preliminary Exam 1 am to 1 pm, August 2, 218 Instructions. You have three hours to complete this exam. Submit solutions to four (and no more) of the following six problems. Please start
Pivoting. Reading: GV96 Section 3.4, Stew98 Chapter 3: 1.3
 Pivoting Reading: GV96 Section 3.4, Stew98 Chapter 3: 1.3 In the previous discussions we have assumed that the LU factorization of A existed and the various versions could compute it in a stable manner.
Pivoting Reading: GV96 Section 3.4, Stew98 Chapter 3: 1.3 In the previous discussions we have assumed that the LU factorization of A existed and the various versions could compute it in a stable manner.
Numerical Linear Algebra
 Numerical Linear Algebra Decompositions, numerical aspects Gerard Sleijpen and Martin van Gijzen September 27, 2017 1 Delft University of Technology Program Lecture 2 LU-decomposition Basic algorithm Cost
Numerical Linear Algebra Decompositions, numerical aspects Gerard Sleijpen and Martin van Gijzen September 27, 2017 1 Delft University of Technology Program Lecture 2 LU-decomposition Basic algorithm Cost
Program Lecture 2. Numerical Linear Algebra. Gaussian elimination (2) Gaussian elimination. Decompositions, numerical aspects
 Gaussian elimination. Decompositions, numerical aspects") Numerical Linear Algebra Decompositions, numerical aspects Program Lecture 2 LU-decomposition Basic algorithm Cost Stability Pivoting Cholesky decomposition Sparse matrices and reorderings Gerard Sleijpen
Numerical Linear Algebra Decompositions, numerical aspects Program Lecture 2 LU-decomposition Basic algorithm Cost Stability Pivoting Cholesky decomposition Sparse matrices and reorderings Gerard Sleijpen
Linear Algebraic Equations
 Linear Algebraic Equations 1 Fundamentals Consider the set of linear algebraic equations n a ij x i b i represented by Ax b j with [A b ] [A b] and (1a) r(a) rank of A (1b) Then Axb has a solution iff
Linear Algebraic Equations 1 Fundamentals Consider the set of linear algebraic equations n a ij x i b i represented by Ax b j with [A b ] [A b] and (1a) r(a) rank of A (1b) Then Axb has a solution iff
Table 1 Principle Matlab operators and functions Name Description Page reference
 Matlab Index Table 1 summarises the Matlab supplied operators and functions to which we have referred. In most cases only a few of the options available to the individual functions have been fully utilised.
Matlab Index Table 1 summarises the Matlab supplied operators and functions to which we have referred. In most cases only a few of the options available to the individual functions have been fully utilised.
Linear Equations in Linear Algebra
 1 Linear Equations in Linear Algebra 1.1 SYSTEMS OF LINEAR EQUATIONS LINEAR EQUATION,, 1 n A linear equation in the variables equation that can be written in the form a a a b 1 1 2 2 n n a a is an where
1 Linear Equations in Linear Algebra 1.1 SYSTEMS OF LINEAR EQUATIONS LINEAR EQUATION,, 1 n A linear equation in the variables equation that can be written in the form a a a b 1 1 2 2 n n a a is an where
POLI270 - Linear Algebra
 POLI7 - Linear Algebra Septemer 8th Basics a x + a x +... + a n x n b () is the linear form where a, b are parameters and x n are variables. For a given equation such as x +x you only need a variable and
POLI7 - Linear Algebra Septemer 8th Basics a x + a x +... + a n x n b () is the linear form where a, b are parameters and x n are variables. For a given equation such as x +x you only need a variable and
Main matrix factorizations
 Main matrix factorizations A P L U P permutation matrix, L lower triangular, U upper triangular Key use: Solve square linear system Ax b. A Q R Q unitary, R upper triangular Key use: Solve square or overdetrmined
Main matrix factorizations A P L U P permutation matrix, L lower triangular, U upper triangular Key use: Solve square linear system Ax b. A Q R Q unitary, R upper triangular Key use: Solve square or overdetrmined
1 GSW Sets of Systems
 1 Often, we have to solve a whole series of sets of simultaneous equations of the form y Ax, all of which have the same matrix A, but each of which has a different known vector y, and a different unknown
1 Often, we have to solve a whole series of sets of simultaneous equations of the form y Ax, all of which have the same matrix A, but each of which has a different known vector y, and a different unknown