EGR 1301 Introduction to Static Analysis
|
|
|
- Arabella Leonard
- 6 years ago
- Views:
Transcription





1 Slide 1
2 EGR 1301 Introduction to Static Analysis Presentation adapted from Distance Learning / Online Instructional Presentation Originally created by Mr. Dick Campbell Presented by: Departments of Engineering Baylor University Slide 2


3 Outline Understand the definition of Mechanics Learn the difference between static and dynamic analysis Understand the concept of force as a vector Separate vector into x and y components. Apply this concept to analyzing sums of forces (ΣF=0), as well as sum of moments (ΣM=0). Understand the importance of engineering analysis design. Apply these concepts to a foot bridge, wall hanging, and even biomechanics Slide 3

4 Mechanics Mechanics - the study of objects at rest or in motion, the effects of forces on a body, and the prediction motion. The fundamentals of Mechanics were formulated by Isaac Newton, using his three Laws: 1. A body at rest or in constant motion remains in that state until acted upon by an external unopposed force. 2. An unopposed force causes a mass to accelerate. 3. Every force action has an equal and opposite reaction. Slide 4


5 Mechanics Mechanics is divided into the study of Statics and Dynamics. Newton s 2nd Law is expressed as: Slide 5
6 Statics vs. Dynamics Static analysis F 0 Therefore...a = 0 In Statics, nothing is accelerating! Newton s 1st Law Statics is the study of forces acting on a non-accelerating body, and the reaction of that body Dynamic Analysis If an unopposed force acts: F 0 Acceleration is proportional to the mass of the body Dynamics is the study of the motion of a body, both in translation and rotation. Slide 6


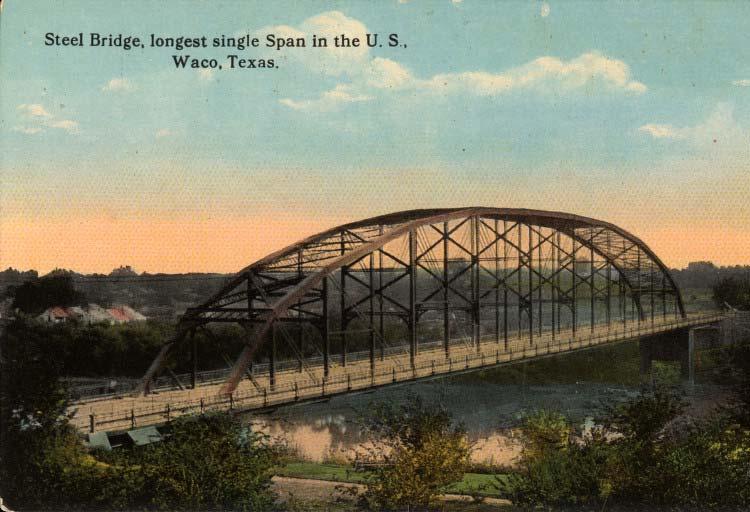
7 The Example of Engineering Analysis Baylor Engineers in Africa, May professors, 6 students Kenya, Africa Engineering services to Kenya s poor population Foot Bridge Project 40-m wide river Analyze for safety and possible design improvements Slide 7

 Several drownings")
8 Need For Bridge Village was divided, far side had trouble: Taking their farm produce to market Attending school Getting medical care Situation 5 miles to nearest bridge (20 mile round trip) Several drownings per year Slide 8


9 Need For Bridge Estimates of approximately 400 crossings per day Saving 1,460,000 miles of walking per year Approximate cost: $5000 1/3 per mile per year Great impact at minimal cost Slide 9

 stand in the center, what is the cable tension?")
10 How Does Engineering Analysis Help? Cable used is rated to withstand a maximum load in tension of 16,000 lbs. How much can the bridge support? How is cable failure considered in the design? If six people (est lbs.) stand in the center, what is the cable tension? What is the safety factor (SF)? S. F. Rating Load Slide 10


11 Types of Loading Tension pull apart Compression push together Moment rotation Shear distort shape Slide 11


12 Force as a Vector Scalar Has magnitude only (i.e. it s just a number ) Vector Has magnitude and direction In an x-y coordinate system, force may be broken down into components X-component parallel to x-axis Y-component parallel to y-axis Θ Slide 12




 F tan 1 2")
 F x F cos() Slide 13")
13 Force as a Vector Use Trigonometry to: Calculate the magnitude and angle of the vector from the magnitude of its components (Pythagorean theorem & inverse tangent) Calculate the magnitude of the components from the magnitude and angle of the vector (sine and cosine) F tan 1 2 F F y x F x F y 2 F y F sin() F x F cos() Slide 13
14 Adding Vectors Addition can be interpreted: Graphically: move the start of b to the tail of a Mathematically: add the components that lie in the same direction a y b y a x a b x b c y c c x c c c x y a a a x y b b b x y Slide 14
15 Figure
16 Figure
17 Multiplying a Vector by a Scalar Multiplying by a scalar means: Changing the magnitude of the vector But not changing direction Except for negative numbers b y a y a b b c a where c is a scalar (i.e. just a number ) b c a b a x b x b x b y c c a cos( ) a sin( ) Slide 17




18 Unit Vectors î and ĵ indicate direction of vector components î has magnitude of 1 unit in the x-direction ĵ has magnitude of 1 unit in the y-direction When a vector component is multiplied by î or ĵ Magnitude of the vector component remains unchanged The direction of the vector component is defined as parallel to the x- or y-axis Can now write a vector as: F F iˆ x F y ˆj Slide 18
19 Force Vectors & Static Analysis of Foot Bridge Simplifying assumptions Loaded with six persons (approx lbs) at the center Cables are straight Neglect the weight of the bridge 130 ft 5 ft F? F 1? 2 F 1000 lbs 3 ĵ î Slide 19


")

20 Setting Up the Analysis Draw a sketch of the forces as vectors Write each force vector in terms of i and j components Components perpendicular to each other can be treated separately Invoke Newton s 1 st Law Sum of i components=zero (x direction) Sum of j components = zero (y direction) Solve the two equations with two unknowns Slide 20
21 Static Analysis of the Foot Bridge s Cable Resolve the three forces into î, ĵ components Identify our unknowns (i.e., F 1 and F 2 ) Set up summation equations in î, ĵ directions Solve these two equations for the unknowns 130 ft? 5 F? F 2? 1 ft F 1000 lbs (tan 65 ) ĵ 4.4 î Slide 21
22 Static Analysis of the Foot Bridge s Cable 130 ft ĵ î 4.4 F? 1 F F cosiˆ F sinˆj F 1000 lbs 3 5 ft F F 0 lbs iˆ 1000 lbs F? 2 F cos iˆ F sin ˆj ˆj Fiˆ Fˆj F cosiˆ F sinˆj F F cosiˆ 0lbs iˆ 2 sinˆj 1000lbs ˆj Slide 22
23 Static Analysis of the Foot Bridge s Cable Fiˆ F cosiˆ F cosiˆ 0lbs iˆ 2 Fˆj F sinˆj F sinˆj 1000lbs 1 0 ˆj Rearranging and substituting in angles: F1 cos( 4.4) F2 cos(4.4), F1 F2 F1 sin( 4.4) F2 sin(4.4) 1000lbs F1 F lbs Safety Factor (Cable Strength = 16,000 lbs): lbs S. F lbs Slide 23

24 Engineering is an Exercise in Trade-Offs! If we allow the bridge to have larger sag, what will happen to the tension in the cables? What will happen to the required anchors for the cables at the two ends of the bridge? What is the disadvantage of having larger sag in the bridge? Slide 24
 1000lbs F F 2879 1 2 lbs 16000 lbs S. F. 5.")
25 Static Analysis of the Foot Bridge s Cable What happens to the Safety Factor if we increase the o sag? Let : 10 Then: 2F 1 sin(10) 1000lbs F F lbs lbs S. F lbs Slide 25

 now seem too low, too high, or about right?")
26 Engineering is an Estimate What did our model (sketch) not take into account? How will that affect our calculations, in particular, the safety factor? Does our safety factor (2.45) now seem too low, too high, or about right? How do you determine what constitutes a good safety factor? Slide 26



 ft 12in 30lbs 3 V 16.")
27 What About the Weight of the Bridge? The wood decking was built using 3-1 x 6 planks laid side by side. The bridge span is 130 feet. The wood s density is 30 lbs/ft 3. The weight of the cable and hangers is approx. 112 lbs. Can you calculate the weight of the decking? What does this do to our safety factor? 130 ft V m 1 ft ( 3) ft 12in 30lbs 3 V ft 488lbs 3 ft in6 in 130 ft lbs 112lbs 600lbs Slide 27
 1600lbs 2 1 F F 4607 lbs 1 2 16000 lbs S. F. 3.")
28 Static Analysis of the Foot Bridge s Cable What happens to the Safety Factor if we include the weight of the bridge? Let: o 10 and W lbs Then: F sin( 10) 1600lbs 2 1 F F 4607 lbs lbs S. F lbs Slide 28
29 Suspension Bridges How does a suspension bridge like the Golden Gate provide a way to achieve the goals of lower cost and convenience of use? What are the disadvantages in the suspension bridge design? Slide 29
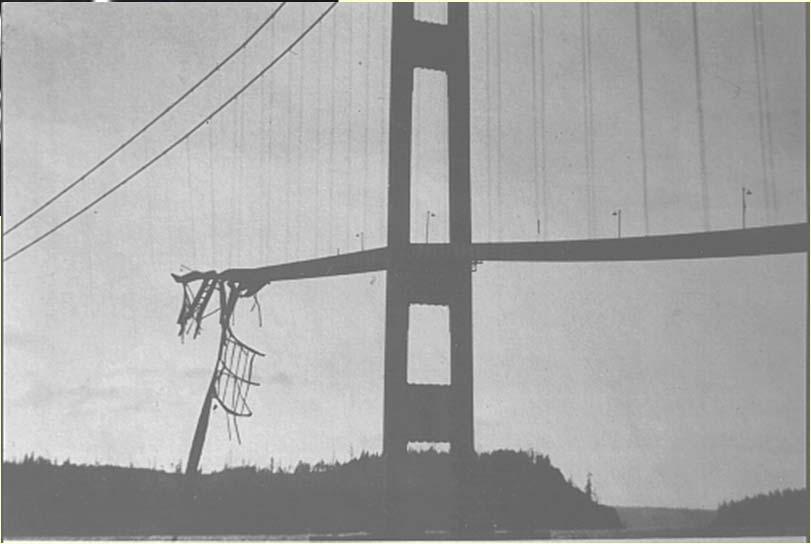
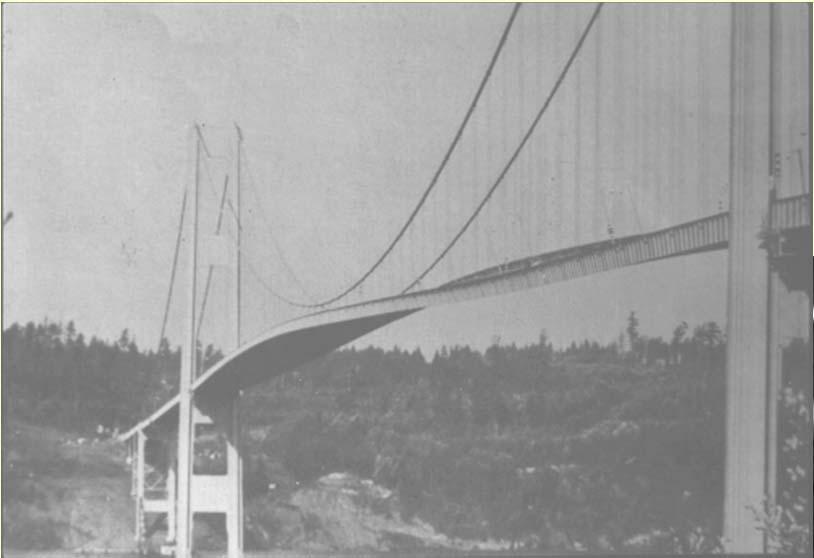
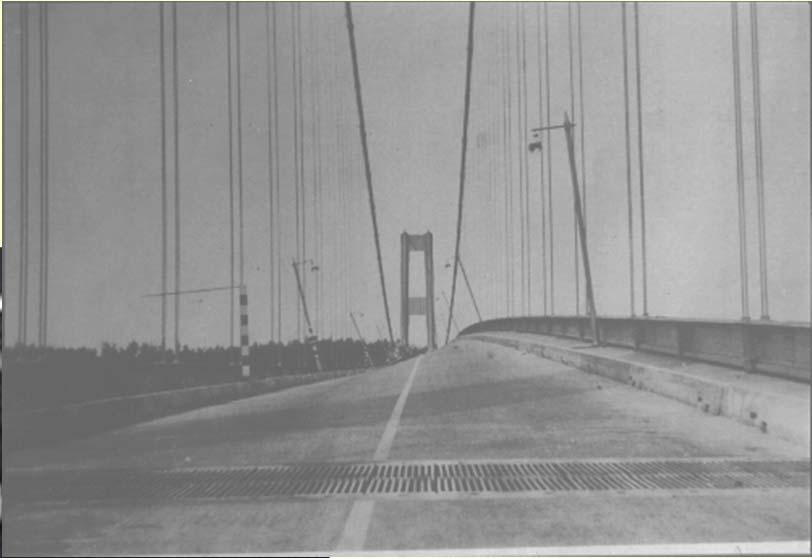
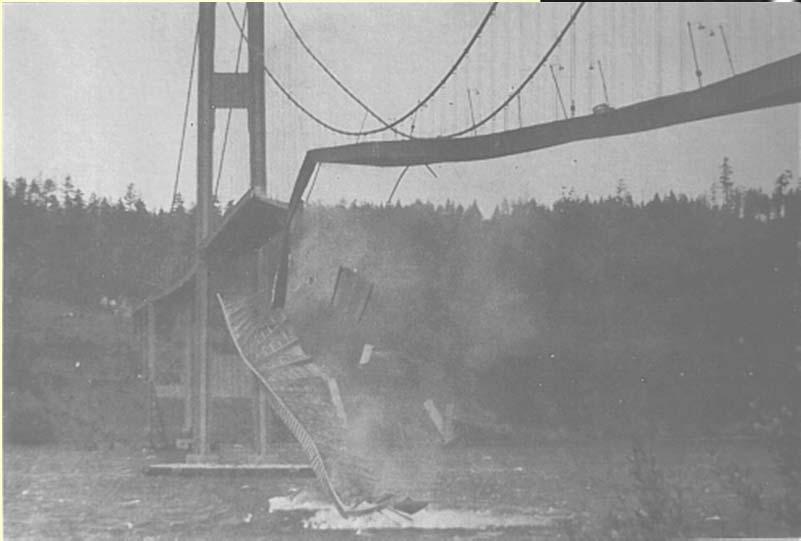
30 Engineering Disasters: Tacoma Narrows Bridge Slide 30

31 Picture Frame Sample Problem What is the best way to hang a 40 lb mirror on a wall? How much tension is in the hanger wire in each case? Option 1: One Hanger in Wall Option 2: Two Hangers in Wall 12 in 12 in 48 in 12 in Slide 31
32 Picture Frame Sample Problem Option 1: One Hanger in Wall ĵ F 3 12 in î F 1 F 2 F 3 48 in F 0 lbs iˆ 40 lbs ˆ 1 j 12 tan F F cos iˆ F sin ˆ j F F cos iˆ F sin ˆ j F F i ˆ 2 F 3 Fˆ j 0 F2 cos F3 cos 0 40lbs F2 sin F3 sin 40 lbs 2 F 2 sin 40lbs F2 F lbs 2sin(26.6) Slide 32 0
33 Picture Frame Sample Problem Option 2: Two Hangers in Wall ĵ 12 in î F 1 F 3 12 in F 0 lbs iˆ 20 lbs ˆ 1 j 12 tan F F iˆ 2 2 cos F2 sin F F iˆ 0 ˆj 3 3 ˆj F i ˆ F 2 0 F2 cos F3 0 F cos F 2 3 Fˆ j 20lbs F2 sin 0 20lbs F lbs sin F 28.3lbs cos 20. 0lbs 3 Slide 33

 = -400 lb-in The")
34 Moments Moments occur at a given point and are caused by a force that causes rotation about a point or an axis. A moment is equal to the Force times the perpendicular distance from the force to the point that is being evaluated. Force F causes a clockwise rotation if unopposed about point A in the picture below. 4in is the perpendicular distance and 100lb is the force in the picture, so the Moment M caused by this force is: M=-(100lb x 4in) = -400 lb-in The moment is negative because it is clockwise. Be careful with units, Moments can be measured in lb-in, lb- ft, N-m, or other units. Slide 34
35 Moments Example 1 Calculate the moment at point A. 500 lbs 8 ft 2 ft A Remember the sign convention for moments: lbs M 1 = -(8 ft)(125 lbs) = lb-ft M 2 = +(10 ft)(500 lbs) = 5000 lb-ft M A = M 1 + M 2 = 4000 lb-ft Slide 35
36 Moments Example 2 Calculate the moment at point A. Remember the sign convention for moments: A 10 ft + 60 o F x F y M Fx M Fy M A 200 lbs 200lbs cos(60) 100lbs 200lbs sin(60) lbs (100lbs)(0 ft) 0lbs ft (173.2 lbs)(10 ft) 1732 lbs ft (173.2 lbs)(10 ft) (100lbs)(0 ft) 1732 lbs ft Slide 36

37 Figure 3.13 Moment of a Force About a Point Product of a Force and the Perpendicular Distance to the Point 37

38 Example Problem The moment exerted about point E by the weight is 300 lbin. What moment does the weight exert about point S? 38
39 Equilibrium of A Particle
Vector Mechanics: Statics
 PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
two forces and moments Structural Math Physics for Structures Structural Math
 RHITETURL STRUTURES: ORM, EHVIOR, ND DESIGN DR. NNE NIHOLS SUMMER 05 lecture two forces and moments orces & Moments rchitectural Structures 009abn Structural Math quantify environmental loads how big is
RHITETURL STRUTURES: ORM, EHVIOR, ND DESIGN DR. NNE NIHOLS SUMMER 05 lecture two forces and moments orces & Moments rchitectural Structures 009abn Structural Math quantify environmental loads how big is
HATZIC SECONDARY SCHOOL
 HATZIC SECONDARY SCHOOL PROVINCIAL EXAMINATION ASSIGNMENT STATIC EQUILIBRIUM MULTIPLE CHOICE / 33 OPEN ENDED / 80 TOTAL / 113 NAME: 1. State the condition for translational equilibrium. A. ΣF = 0 B. ΣF
HATZIC SECONDARY SCHOOL PROVINCIAL EXAMINATION ASSIGNMENT STATIC EQUILIBRIUM MULTIPLE CHOICE / 33 OPEN ENDED / 80 TOTAL / 113 NAME: 1. State the condition for translational equilibrium. A. ΣF = 0 B. ΣF
two loads, forces and vectors ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2017 lecture ARCH 614
 ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2017 lecture two y x z loads, forces and vectors Forces 1 Structural Design planning preliminary structural configuration
ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2017 lecture two y x z loads, forces and vectors Forces 1 Structural Design planning preliminary structural configuration
Equilibrium in Two Dimensions
 C h a p t e r 6 Equilibrium in Two Dimensions In this chapter, you will learn the following to World Class standards: 1. The Ladder Against the Wall 2. The Street Light 3. The Floor Beam 6-1 The Ladder
C h a p t e r 6 Equilibrium in Two Dimensions In this chapter, you will learn the following to World Class standards: 1. The Ladder Against the Wall 2. The Street Light 3. The Floor Beam 6-1 The Ladder
FORCE TABLE INTRODUCTION
 FORCE TABLE INTRODUCTION All measurable quantities can be classified as either a scalar 1 or a vector 2. A scalar has only magnitude while a vector has both magnitude and direction. Examples of scalar
FORCE TABLE INTRODUCTION All measurable quantities can be classified as either a scalar 1 or a vector 2. A scalar has only magnitude while a vector has both magnitude and direction. Examples of scalar
Vectors in Physics. Topics to review:
 Vectors in Physics Topics to review: Scalars Versus Vectors The Components of a Vector Adding and Subtracting Vectors Unit Vectors Position, Displacement, Velocity, and Acceleration Vectors Relative Motion
Vectors in Physics Topics to review: Scalars Versus Vectors The Components of a Vector Adding and Subtracting Vectors Unit Vectors Position, Displacement, Velocity, and Acceleration Vectors Relative Motion
Tenth Edition STATICS 1 Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: John Chen California Polytechnic State University
 T E CHAPTER 1 VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: Introduction John Chen California Polytechnic State University! Contents
T E CHAPTER 1 VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: Introduction John Chen California Polytechnic State University! Contents
use one of the methods to compute the magnitude of the torque, given the magnitudes of the force and position vector
 PH2213 : Examples from Chapter 12 : Static Equilibrium Equilibrium represents the condition where an object is not accelerating (either linearly or angularly). It can still be moving (and rotating), it
PH2213 : Examples from Chapter 12 : Static Equilibrium Equilibrium represents the condition where an object is not accelerating (either linearly or angularly). It can still be moving (and rotating), it
UNIT-05 VECTORS. 3. Utilize the characteristics of two or more vectors that are concurrent, or collinear, or coplanar.
 UNIT-05 VECTORS Introduction: physical quantity that can be specified by just a number the magnitude is known as a scalar. In everyday life you deal mostly with scalars such as time, temperature, length
UNIT-05 VECTORS Introduction: physical quantity that can be specified by just a number the magnitude is known as a scalar. In everyday life you deal mostly with scalars such as time, temperature, length
a Particle Forces the force. of action its sense is of application. Experimen demonstra forces ( P Resultant of Two Note: a) b) momentum)
 b) momentum)") Chapter 2 : Statics of a Particle 2.2 Force on a Particle: Resultant of Two Forces Recall, force is a vector quantity whichh has magnitude and direction. The direction of the the force. force is defined
Chapter 2 : Statics of a Particle 2.2 Force on a Particle: Resultant of Two Forces Recall, force is a vector quantity whichh has magnitude and direction. The direction of the the force. force is defined
BELLWORK feet
 BELLWORK 1 A hot air balloon is being held in place by two people holding ropes and standing 35 feet apart. The angle formed between the ground and the rope held by each person is 40. Determine the length
BELLWORK 1 A hot air balloon is being held in place by two people holding ropes and standing 35 feet apart. The angle formed between the ground and the rope held by each person is 40. Determine the length
Equilibrium in Three Dimensions
 C h a p t e r 7 Equilibrium in Three Dimensions In this chapter, you will learn the following to World Class standards: Forces in Three Different Axis Wind Load on the Antennae Pole Practice Problem -
C h a p t e r 7 Equilibrium in Three Dimensions In this chapter, you will learn the following to World Class standards: Forces in Three Different Axis Wind Load on the Antennae Pole Practice Problem -
Chapter 5: Forces in Two Dimensions. Click the mouse or press the spacebar to continue.
 Chapter 5: Forces in Two Dimensions Click the mouse or press the spacebar to continue. Chapter 5 Forces in Two Dimensions In this chapter you will: Represent vector quantities both graphically and algebraically.
Chapter 5: Forces in Two Dimensions Click the mouse or press the spacebar to continue. Chapter 5 Forces in Two Dimensions In this chapter you will: Represent vector quantities both graphically and algebraically.
CONDITIONS OF EQUILIBRIUM
 CONDITIONS OF EQUILIBRIUM Introduction Aim: To investigate the conditions required for an object to be in equilibrium This exercise looks at a rigid object which is in both translational and rotational
CONDITIONS OF EQUILIBRIUM Introduction Aim: To investigate the conditions required for an object to be in equilibrium This exercise looks at a rigid object which is in both translational and rotational
Engineering Mechanics Department of Mechanical Engineering Dr. G. Saravana Kumar Indian Institute of Technology, Guwahati
 Engineering Mechanics Department of Mechanical Engineering Dr. G. Saravana Kumar Indian Institute of Technology, Guwahati Module 3 Lecture 6 Internal Forces Today, we will see analysis of structures part
Engineering Mechanics Department of Mechanical Engineering Dr. G. Saravana Kumar Indian Institute of Technology, Guwahati Module 3 Lecture 6 Internal Forces Today, we will see analysis of structures part
Name: Lab Partner: Section: In this experiment vector addition, resolution of vectors into components, force, and equilibrium will be explored.
 Chapter 3 Vectors Name: Lab Partner: Section: 3.1 Purpose In this experiment vector addition, resolution of vectors into components, force, and equilibrium will be explored. 3.2 Introduction A vector is
Chapter 3 Vectors Name: Lab Partner: Section: 3.1 Purpose In this experiment vector addition, resolution of vectors into components, force, and equilibrium will be explored. 3.2 Introduction A vector is
Chapter 5. Forces in Two Dimensions
 Chapter 5 Forces in Two Dimensions Chapter 5 Forces in Two Dimensions In this chapter you will: Represent vector quantities both graphically and algebraically. Use Newton s laws to analyze motion when
Chapter 5 Forces in Two Dimensions Chapter 5 Forces in Two Dimensions In this chapter you will: Represent vector quantities both graphically and algebraically. Use Newton s laws to analyze motion when
Lab 3. Adding Forces with a Force Table
 Lab 3. Adding Forces with a Force Table Goals To describe the effect of three balanced forces acting on a ring or disk using vector addition. To practice adding force vectors graphically and mathematically
Lab 3. Adding Forces with a Force Table Goals To describe the effect of three balanced forces acting on a ring or disk using vector addition. To practice adding force vectors graphically and mathematically
Lab 3. Adding Forces with a Force Table
 Lab 3. Adding Forces with a Force Table Goals To describe the effect of three balanced forces acting on a ring or disk using vector addition. To practice adding force vectors graphically and mathematically
Lab 3. Adding Forces with a Force Table Goals To describe the effect of three balanced forces acting on a ring or disk using vector addition. To practice adding force vectors graphically and mathematically
Chapter 2 One-Dimensional Kinematics
 Review: Chapter 2 One-Dimensional Kinematics Description of motion in one dimension Copyright 2010 Pearson Education, Inc. Review: Motion with Constant Acceleration Free fall: constant acceleration g =
Review: Chapter 2 One-Dimensional Kinematics Description of motion in one dimension Copyright 2010 Pearson Education, Inc. Review: Motion with Constant Acceleration Free fall: constant acceleration g =
Physics 101 Lecture 5 Newton`s Laws
 Physics 101 Lecture 5 Newton`s Laws Dr. Ali ÖVGÜN EMU Physics Department The Laws of Motion q Newton s first law q Force q Mass q Newton s second law q Newton s third law qfrictional forces q Examples
Physics 101 Lecture 5 Newton`s Laws Dr. Ali ÖVGÜN EMU Physics Department The Laws of Motion q Newton s first law q Force q Mass q Newton s second law q Newton s third law qfrictional forces q Examples
Force Vectors and Static Equilibrium
 Force Vectors 1 Force Vectors and Static Equilibrium Overview: In this experiment you will hang weights from pulleys over the edge of a small round force table, to exert various forces on a metal ring
Force Vectors 1 Force Vectors and Static Equilibrium Overview: In this experiment you will hang weights from pulleys over the edge of a small round force table, to exert various forces on a metal ring
Chapter 4: Newton s Laws of Motion
 Chapter 4: Newton s Laws of Motion We will study classical motion: No quantum mechanics No relativity We introduce the concept of force and define it in terms of the acceleration of a standard d body Intuitively,
Chapter 4: Newton s Laws of Motion We will study classical motion: No quantum mechanics No relativity We introduce the concept of force and define it in terms of the acceleration of a standard d body Intuitively,
Lecture Outlines Chapter 3. Physics, 3 rd Edition James S. Walker
 Lecture Outlines Chapter 3 Physics, 3 rd Edition James S. Walker 2007 Pearson Prentice Hall This work is protected by United States copyright laws and is provided solely for the use of instructors in teaching
Lecture Outlines Chapter 3 Physics, 3 rd Edition James S. Walker 2007 Pearson Prentice Hall This work is protected by United States copyright laws and is provided solely for the use of instructors in teaching
Unit 4 Statics. Static Equilibrium Translational Forces Torque
 Unit 4 Statics Static Equilibrium Translational Forces Torque 1 Dynamics vs Statics Dynamics: is the study of forces and motion. We study why objects move. Statics: is the study of forces and NO motion.
Unit 4 Statics Static Equilibrium Translational Forces Torque 1 Dynamics vs Statics Dynamics: is the study of forces and motion. We study why objects move. Statics: is the study of forces and NO motion.
Physics 185F2013 Lecture Two
 Introduction Physics 185F2013 Lecture Two October 1, 2013 Dr. Jones 1 1 Department of Physics Drexel University October 1, 2013 Dr. Jones (Drexel) Physics 185F2013 Lecture Two October 1, 2013 1 / 39 Introduction
Introduction Physics 185F2013 Lecture Two October 1, 2013 Dr. Jones 1 1 Department of Physics Drexel University October 1, 2013 Dr. Jones (Drexel) Physics 185F2013 Lecture Two October 1, 2013 1 / 39 Introduction
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA FURTHER MECHANICAL PRINCIPLES AND APPLICATIONS UNIT 11 - NQF LEVEL 3 OUTCOME 1 - FRAMES AND BEAMS
 EDEXCEL NATIONAL CERTIFICATE/DIPLOMA FURTHER MECHANICAL PRINCIPLES AND APPLICATIONS UNIT 11 - NQF LEVEL 3 OUTCOME 1 - FRAMES AND BEAMS TUTORIAL 2 - BEAMS CONTENT Be able to determine the forces acting
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA FURTHER MECHANICAL PRINCIPLES AND APPLICATIONS UNIT 11 - NQF LEVEL 3 OUTCOME 1 - FRAMES AND BEAMS TUTORIAL 2 - BEAMS CONTENT Be able to determine the forces acting
Kinematics in Two Dimensions; 2D- Vectors
 Kinematics in Two Dimensions; 2D- Vectors Addition of Vectors Graphical Methods Below are two example vector additions of 1-D displacement vectors. For vectors in one dimension, simple addition and subtraction
Kinematics in Two Dimensions; 2D- Vectors Addition of Vectors Graphical Methods Below are two example vector additions of 1-D displacement vectors. For vectors in one dimension, simple addition and subtraction
PHYS-2010: General Physics I Course Lecture Notes Section V
 PHYS-2010: General Physics I Course Lecture Notes Section V Dr. Donald G. Luttermoser East Tennessee State University Edition 2.5 Abstract These class notes are designed for use of the instructor and students
PHYS-2010: General Physics I Course Lecture Notes Section V Dr. Donald G. Luttermoser East Tennessee State University Edition 2.5 Abstract These class notes are designed for use of the instructor and students
Chapter 5. The Laws of Motion
 Chapter 5 The Laws of Motion Sir Isaac Newton 1642 1727 Formulated basic laws of mechanics Discovered Law of Universal Gravitation Invented form of calculus Many observations dealing with light and optics
Chapter 5 The Laws of Motion Sir Isaac Newton 1642 1727 Formulated basic laws of mechanics Discovered Law of Universal Gravitation Invented form of calculus Many observations dealing with light and optics
EQUATIONS OF MOTION: RECTANGULAR COORDINATES
 EQUATIONS OF MOTION: RECTANGULAR COORDINATES Today s Objectives: Students will be able to: 1. Apply Newton s second law to determine forces and accelerations for particles in rectilinear motion. In-Class
EQUATIONS OF MOTION: RECTANGULAR COORDINATES Today s Objectives: Students will be able to: 1. Apply Newton s second law to determine forces and accelerations for particles in rectilinear motion. In-Class
Chapter 2 Mechanical Equilibrium
 Chapter 2 Mechanical Equilibrium I. Force (2.1) A. force is a push or pull 1. A force is needed to change an object s state of motion 2. State of motion may be one of two things a. At rest b. Moving uniformly
Chapter 2 Mechanical Equilibrium I. Force (2.1) A. force is a push or pull 1. A force is needed to change an object s state of motion 2. State of motion may be one of two things a. At rest b. Moving uniformly
Static Equilibrium; Torque
 Static Equilibrium; Torque The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The first condition for equilibrium is that the net force
Static Equilibrium; Torque The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The first condition for equilibrium is that the net force
2-9. The plate is subjected to the forces acting on members A and B as shown. If θ = 60 o, determine the magnitude of the resultant of these forces
 2-9. The plate is subjected to the forces acting on members A and B as shown. If θ 60 o, determine the magnitude of the resultant of these forces and its direction measured clockwise from the positie x
2-9. The plate is subjected to the forces acting on members A and B as shown. If θ 60 o, determine the magnitude of the resultant of these forces and its direction measured clockwise from the positie x
Torque. Physics 6A. Prepared by Vince Zaccone For Campus Learning Assistance Services at UCSB
 Physics 6A Torque is what causes angular acceleration (just like a force causes linear acceleration) Torque is what causes angular acceleration (just like a force causes linear acceleration) For a torque
Physics 6A Torque is what causes angular acceleration (just like a force causes linear acceleration) Torque is what causes angular acceleration (just like a force causes linear acceleration) For a torque
Chapter 12. Static Equilibrium and Elasticity
 Chapter 12 Static Equilibrium and Elasticity Static Equilibrium Equilibrium implies that the object moves with both constant velocity and constant angular velocity relative to an observer in an inertial
Chapter 12 Static Equilibrium and Elasticity Static Equilibrium Equilibrium implies that the object moves with both constant velocity and constant angular velocity relative to an observer in an inertial
Physics 111 Lecture 4 Newton`s Laws
 Physics 111 Lecture 4 Newton`s Laws Dr. Ali ÖVGÜN EMU Physics Department www.aovgun.com he Laws of Motion q Newton s first law q Force q Mass q Newton s second law q Newton s third law q Examples Isaac
Physics 111 Lecture 4 Newton`s Laws Dr. Ali ÖVGÜN EMU Physics Department www.aovgun.com he Laws of Motion q Newton s first law q Force q Mass q Newton s second law q Newton s third law q Examples Isaac
Chapter 5. The Laws of Motion
 Chapter 5 The Laws of Motion The Laws of Motion The description of an object in There was no consideration of what might influence that motion. Two main factors need to be addressed to answer questions
Chapter 5 The Laws of Motion The Laws of Motion The description of an object in There was no consideration of what might influence that motion. Two main factors need to be addressed to answer questions
Force Table: Force Vector Components
 Physics Bridging Course 0885-398-01 Adding Vectors By Components Topic: Adding Vectors By Components Preparation: GR&R: Read Chapter 2 WebAssign: To followup this workshop, do Week 2: Force and Equilibrium
Physics Bridging Course 0885-398-01 Adding Vectors By Components Topic: Adding Vectors By Components Preparation: GR&R: Read Chapter 2 WebAssign: To followup this workshop, do Week 2: Force and Equilibrium
Concept of Force Challenge Problem Solutions
 Concept of Force Challenge Problem Solutions Problem 1: Force Applied to Two Blocks Two blocks sitting on a frictionless table are pushed from the left by a horizontal force F, as shown below. a) Draw
Concept of Force Challenge Problem Solutions Problem 1: Force Applied to Two Blocks Two blocks sitting on a frictionless table are pushed from the left by a horizontal force F, as shown below. a) Draw
Vectors for Physics. AP Physics C
 Vectors for Physics AP Physics C A Vector is a quantity that has a magnitude (size) AND a direction. can be in one-dimension, two-dimensions, or even three-dimensions can be represented using a magnitude
Vectors for Physics AP Physics C A Vector is a quantity that has a magnitude (size) AND a direction. can be in one-dimension, two-dimensions, or even three-dimensions can be represented using a magnitude
Vector components and motion
 Vector components and motion Objectives Distinguish between vectors and scalars and give examples of each. Use vector diagrams to interpret the relationships among vector quantities such as force and acceleration.
Vector components and motion Objectives Distinguish between vectors and scalars and give examples of each. Use vector diagrams to interpret the relationships among vector quantities such as force and acceleration.
Chapter 18 Static Equilibrium
 Chapter 8 Static Equilibrium Chapter 8 Static Equilibrium... 8. Introduction Static Equilibrium... 8. Lever Law... 3 Example 8. Lever Law... 5 8.3 Generalized Lever Law... 6 8.4 Worked Examples... 8 Example
Chapter 8 Static Equilibrium Chapter 8 Static Equilibrium... 8. Introduction Static Equilibrium... 8. Lever Law... 3 Example 8. Lever Law... 5 8.3 Generalized Lever Law... 6 8.4 Worked Examples... 8 Example
Vectors A Guideline For Motion
 AP Physics-1 Vectors A Guideline For Motion Introduction: You deal with scalar quantities in many aspects of your everyday activities. For example, you know that 2 liters plus 2 liters is 4 liters. The
AP Physics-1 Vectors A Guideline For Motion Introduction: You deal with scalar quantities in many aspects of your everyday activities. For example, you know that 2 liters plus 2 liters is 4 liters. The
FE Sta'cs Review. Torch Ellio0 (801) MCE room 2016 (through 2000B door)
 MCE room 2016 (through 2000B door)") FE Sta'cs Review h0p://www.coe.utah.edu/current- undergrad/fee.php Scroll down to: Sta'cs Review - Slides Torch Ellio0 ellio0@eng.utah.edu (801) 587-9016 MCE room 2016 (through 2000B door) Posi'on and
FE Sta'cs Review h0p://www.coe.utah.edu/current- undergrad/fee.php Scroll down to: Sta'cs Review - Slides Torch Ellio0 ellio0@eng.utah.edu (801) 587-9016 MCE room 2016 (through 2000B door) Posi'on and
Chapter 5. The Laws of Motion
 Chapter 5 The Laws of Motion The Laws of Motion The description of an object in motion included its position, velocity, and acceleration. There was no consideration of what might influence that motion.
Chapter 5 The Laws of Motion The Laws of Motion The description of an object in motion included its position, velocity, and acceleration. There was no consideration of what might influence that motion.
is the study of and. We study objects. is the study of and. We study objects.
 Static Equilibrium Translational Forces Torque Unit 4 Statics Dynamics vs Statics is the study of and. We study objects. is the study of and. We study objects. Recall Newton s First Law All objects remain
Static Equilibrium Translational Forces Torque Unit 4 Statics Dynamics vs Statics is the study of and. We study objects. is the study of and. We study objects. Recall Newton s First Law All objects remain
2008 FXA THREE FORCES IN EQUILIBRIUM 1. Candidates should be able to : TRIANGLE OF FORCES RULE
 THREE ORCES IN EQUILIBRIUM 1 Candidates should be able to : TRIANGLE O ORCES RULE Draw and use a triangle of forces to represent the equilibrium of three forces acting at a point in an object. State that
THREE ORCES IN EQUILIBRIUM 1 Candidates should be able to : TRIANGLE O ORCES RULE Draw and use a triangle of forces to represent the equilibrium of three forces acting at a point in an object. State that
Mechanics of Materials
 Mechanics of Materials 2. Introduction Dr. Rami Zakaria References: 1. Engineering Mechanics: Statics, R.C. Hibbeler, 12 th ed, Pearson 2. Mechanics of Materials: R.C. Hibbeler, 9 th ed, Pearson 3. Mechanics
Mechanics of Materials 2. Introduction Dr. Rami Zakaria References: 1. Engineering Mechanics: Statics, R.C. Hibbeler, 12 th ed, Pearson 2. Mechanics of Materials: R.C. Hibbeler, 9 th ed, Pearson 3. Mechanics
The Laws of Motion. Newton s first law Force Mass Newton s second law Gravitational Force Newton s third law Examples
 The Laws of Motion Newton s first law Force Mass Newton s second law Gravitational Force Newton s third law Examples Gravitational Force Gravitational force is a vector Expressed by Newton s Law of Universal
The Laws of Motion Newton s first law Force Mass Newton s second law Gravitational Force Newton s third law Examples Gravitational Force Gravitational force is a vector Expressed by Newton s Law of Universal
Physics 2514 Lecture 13
 Physics 2514 Lecture 13 P. Gutierrez Department of Physics & Astronomy University of Oklahoma Physics 2514 p. 1/18 Goals We will discuss some examples that involve equilibrium. We then move on to a discussion
Physics 2514 Lecture 13 P. Gutierrez Department of Physics & Astronomy University of Oklahoma Physics 2514 p. 1/18 Goals We will discuss some examples that involve equilibrium. We then move on to a discussion
Statics. Today Introductions Review Course Outline and Class Schedule Course Expectations Chapter 1 ENGR 1205 ENGR 1205
 Statics ENGR 1205 Kaitlin Ford kford@mtroyal.ca B175 Today Introductions Review Course Outline and Class Schedule Course Expectations Start Chapter 1 1 the goal of this course is to develop your ability
Statics ENGR 1205 Kaitlin Ford kford@mtroyal.ca B175 Today Introductions Review Course Outline and Class Schedule Course Expectations Start Chapter 1 1 the goal of this course is to develop your ability
Kinematics in Two Dimensions; Vectors
 Kinematics in Two Dimensions; Vectors Vectors & Scalars!! Scalars They are specified only by a number and units and have no direction associated with them, such as time, mass, and temperature.!! Vectors
Kinematics in Two Dimensions; Vectors Vectors & Scalars!! Scalars They are specified only by a number and units and have no direction associated with them, such as time, mass, and temperature.!! Vectors
NEWTON S LAWS OF MOTION (EQUATION OF MOTION) (Sections )
 (Sections )") NEWTON S LAWS OF MOTION (EQUATION OF MOTION) (Sections 13.1-13.3) Today s Objectives: Students will be able to: a) Write the equation of motion for an accelerating body. b) Draw the free-body and kinetic
NEWTON S LAWS OF MOTION (EQUATION OF MOTION) (Sections 13.1-13.3) Today s Objectives: Students will be able to: a) Write the equation of motion for an accelerating body. b) Draw the free-body and kinetic
PHYSICS 220 LAB #3: STATIC EQUILIBRIUM FORCES
 Lab Section M / T / W / Th /24 pts Name: Partners: PHYSICS 220 LAB #3: STATIC EQUILIBRIUM FORCES OBJECTIVES 1. To verify the conditions for static equilibrium. 2. To get practice at finding components
Lab Section M / T / W / Th /24 pts Name: Partners: PHYSICS 220 LAB #3: STATIC EQUILIBRIUM FORCES OBJECTIVES 1. To verify the conditions for static equilibrium. 2. To get practice at finding components
Lecture III. Introduction to Mechanics, Heat, and Sound /FIC 318
 Introduction to Mechanics, Heat, and Sound /FIC 318 Lecture III Motion in two dimensions projectile motion The Laws of Motion Forces, Newton s first law Inertia, Newton s second law Newton s third law
Introduction to Mechanics, Heat, and Sound /FIC 318 Lecture III Motion in two dimensions projectile motion The Laws of Motion Forces, Newton s first law Inertia, Newton s second law Newton s third law
Physics Chapter 4 Newton s Laws of Motion
 Physics Chapter 4 Newton s Classical Mechanics Classical Mechanics Describes the relationship between the motion of objects in our everyday world and the forces acting on them Conditions when Classical
Physics Chapter 4 Newton s Classical Mechanics Classical Mechanics Describes the relationship between the motion of objects in our everyday world and the forces acting on them Conditions when Classical
ME 230 Kinematics and Dynamics
 ME 230 Kinematics and Dynamics Wei-Chih Wang Department of Mechanical Engineering University of Washington Lecture 6: Particle Kinetics Kinetics of a particle (Chapter 13) - 13.4-13.6 Chapter 13: Objectives
ME 230 Kinematics and Dynamics Wei-Chih Wang Department of Mechanical Engineering University of Washington Lecture 6: Particle Kinetics Kinetics of a particle (Chapter 13) - 13.4-13.6 Chapter 13: Objectives
Engineering Mechanics: Statics in SI Units, 12e
 Engineering Mechanics: Statics in SI Units, 12e 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body
Engineering Mechanics: Statics in SI Units, 12e 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body
Significant Figures & Vectors
 You have to complete this reading Booklet before you attempt the Substantive Assignment. Significant Figures Significant Figures & Vectors There are two kinds of numbers in the world Exact: o Example:
You have to complete this reading Booklet before you attempt the Substantive Assignment. Significant Figures Significant Figures & Vectors There are two kinds of numbers in the world Exact: o Example:
Calculating Truss Forces. Method of Joints
 Calculating Truss Forces Method of Joints Forces Compression body being squeezed Tension body being stretched Truss truss is composed of slender members joined together at their end points. They are usually
Calculating Truss Forces Method of Joints Forces Compression body being squeezed Tension body being stretched Truss truss is composed of slender members joined together at their end points. They are usually
Chapter 3 Vectors in Physics. Copyright 2010 Pearson Education, Inc.
 Chapter 3 Vectors in Physics Units of Chapter 3 Scalars Versus Vectors The Components of a Vector Adding and Subtracting Vectors Unit Vectors Position, Displacement, Velocity, and Acceleration Vectors
Chapter 3 Vectors in Physics Units of Chapter 3 Scalars Versus Vectors The Components of a Vector Adding and Subtracting Vectors Unit Vectors Position, Displacement, Velocity, and Acceleration Vectors
Student Content Brief Advanced Level
 Student Content Brief Advanced Level Vectors Background Information Physics and Engineering deal with quantities that have both size and direction. These physical quantities have a special math language
Student Content Brief Advanced Level Vectors Background Information Physics and Engineering deal with quantities that have both size and direction. These physical quantities have a special math language
h p://edugen.wileyplus.com/edugen/courses/crs1404/pc/c05/c2hlch... CHAPTER 5 MOMENTS 1 of 3 10-Sep-12 16:35
 Peter Christopher/Masterfile... 1 of 3 10-Sep-12 16:35 CHAPTER 5 MOMENTS Peter Christopher/Masterfile... 2 of 3 10-Sep-12 16:35 Peter Christopher/Masterfile In Chapter 4 we considered the forces that push
Peter Christopher/Masterfile... 1 of 3 10-Sep-12 16:35 CHAPTER 5 MOMENTS Peter Christopher/Masterfile... 2 of 3 10-Sep-12 16:35 Peter Christopher/Masterfile In Chapter 4 we considered the forces that push
Chapter 2 Statics of Particles. Resultant of Two Forces 8/28/2014. The effects of forces on particles:
 Chapter 2 Statics of Particles The effects of forces on particles: - replacing multiple forces acting on a particle with a single equivalent or resultant force, - relations between forces acting on a particle
Chapter 2 Statics of Particles The effects of forces on particles: - replacing multiple forces acting on a particle with a single equivalent or resultant force, - relations between forces acting on a particle
UNIT V: Multi-Dimensional Kinematics and Dynamics Page 1
 UNIT V: Multi-Dimensional Kinematics and Dynamics Page 1 UNIT V: Multi-Dimensional Kinematics and Dynamics As we have already discussed, the study of the rules of nature (a.k.a. Physics) involves both
UNIT V: Multi-Dimensional Kinematics and Dynamics Page 1 UNIT V: Multi-Dimensional Kinematics and Dynamics As we have already discussed, the study of the rules of nature (a.k.a. Physics) involves both
Physics for Scientists and Engineers. Chapter 3 Vectors and Coordinate Systems
 Phsics for Scientists and Engineers Chapter 3 Vectors and Coordinate Sstems Spring, 2008 Ho Jung Paik Coordinate Sstems Used to describe the position of a point in space Coordinate sstem consists of a
Phsics for Scientists and Engineers Chapter 3 Vectors and Coordinate Sstems Spring, 2008 Ho Jung Paik Coordinate Sstems Used to describe the position of a point in space Coordinate sstem consists of a
ARCH 614 Note Set 2 S2011abn. Forces and Vectors
 orces and Vectors Notation: = name for force vectors, as is A, B, C, T and P = force component in the direction = force component in the direction h = cable sag height L = span length = name for resultant
orces and Vectors Notation: = name for force vectors, as is A, B, C, T and P = force component in the direction = force component in the direction h = cable sag height L = span length = name for resultant
Consider two students pushing with equal force on opposite sides of a desk. Looking top-down on the desk:
 1 Bodies in Equilibrium Recall Newton's First Law: if there is no unbalanced force on a body (i.e. if F Net = 0), the body is in equilibrium. That is, if a body is in equilibrium, then all the forces on
1 Bodies in Equilibrium Recall Newton's First Law: if there is no unbalanced force on a body (i.e. if F Net = 0), the body is in equilibrium. That is, if a body is in equilibrium, then all the forces on
Vectors and 2D Kinematics. AIT AP Physics C
 Vectors and 2D Kinematics Coordinate Systems Used to describe the position of a point in space Coordinate system consists of a fixed reference point called the origin specific axes with scales and labels
Vectors and 2D Kinematics Coordinate Systems Used to describe the position of a point in space Coordinate system consists of a fixed reference point called the origin specific axes with scales and labels
Introduction. 1.1 Introduction. 1.2 Trigonometrical definitions
 Introduction 1.1 Introduction Stress analysis is an important part of engineering science, as failure of most engineering components is usually due to stress. The component under a stress investigation
Introduction 1.1 Introduction Stress analysis is an important part of engineering science, as failure of most engineering components is usually due to stress. The component under a stress investigation
Figure 17.1 The center of mass of a thrown rigid rod follows a parabolic trajectory while the rod rotates about the center of mass.
 17.1 Introduction A body is called a rigid body if the distance between any two points in the body does not change in time. Rigid bodies, unlike point masses, can have forces applied at different points
17.1 Introduction A body is called a rigid body if the distance between any two points in the body does not change in time. Rigid bodies, unlike point masses, can have forces applied at different points
Vector Operations. Vector Operations. Graphical Operations. Component Operations. ( ) ˆk
 ˆk") Vector Operations Vector Operations ME 202 Multiplication by a scalar Addition/subtraction Scalar multiplication (dot product) Vector multiplication (cross product) 1 2 Graphical Operations Component Operations
Vector Operations Vector Operations ME 202 Multiplication by a scalar Addition/subtraction Scalar multiplication (dot product) Vector multiplication (cross product) 1 2 Graphical Operations Component Operations
CHAPTER 2: EQUILIBRIUM OF RIGID BODIES
 For a rigid body to be in equilibrium, the net force as well as the net moment about any arbitrary point O must be zero Summation of all external forces. Equilibrium: Sum of moments of all external forces.
For a rigid body to be in equilibrium, the net force as well as the net moment about any arbitrary point O must be zero Summation of all external forces. Equilibrium: Sum of moments of all external forces.
Lesson 1: Trigonometry Angles and Quadrants
 Trigonometry Lesson 1: Trigonometry Angles and Quadrants An angle of rotation can be determined by rotating a ray about its endpoint or. The starting position of the ray is the side of the angle. The position
Trigonometry Lesson 1: Trigonometry Angles and Quadrants An angle of rotation can be determined by rotating a ray about its endpoint or. The starting position of the ray is the side of the angle. The position
Bridge Force Analysis: Method of Joints
 Bridge Force Analysis: Method of Joints A bridge truss is made up of single bars, which are either in compression, tension or no-load. In order to design a bridge that is stable and can meet the load requirements,
Bridge Force Analysis: Method of Joints A bridge truss is made up of single bars, which are either in compression, tension or no-load. In order to design a bridge that is stable and can meet the load requirements,
Vectors. AP/Honors Physics Mr. Velazquez
 Vectors AP/Honors Physics Mr. Velazquez The Basics Any quantity that refers to a magnitude and a direction is known as a vector quantity. Velocity, acceleration, force, momentum, displacement Other quantities
Vectors AP/Honors Physics Mr. Velazquez The Basics Any quantity that refers to a magnitude and a direction is known as a vector quantity. Velocity, acceleration, force, momentum, displacement Other quantities
CEE 271: Applied Mechanics II, Dynamics Lecture 9: Ch.13, Sec.4-5
 1 / 40 CEE 271: Applied Mechanics II, Dynamics Lecture 9: Ch.13, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa 2 / 40 EQUATIONS OF MOTION:RECTANGULAR COORDINATES
1 / 40 CEE 271: Applied Mechanics II, Dynamics Lecture 9: Ch.13, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa 2 / 40 EQUATIONS OF MOTION:RECTANGULAR COORDINATES
Determine the angle θ between the two position vectors.
 -100. Determine the angle θ between the two position vectors. -105. A force of 80 N is applied to the handle of the wrench. Determine the magnitudes of the components of the force acting along the axis
-100. Determine the angle θ between the two position vectors. -105. A force of 80 N is applied to the handle of the wrench. Determine the magnitudes of the components of the force acting along the axis
Lecture 5. Dynamics. Forces: Newton s First and Second
 Lecture 5 Dynamics. Forces: Newton s First and Second What is a force? It s a pull or a push: F F Force is a quantitative description of the interaction between two physical bodies that causes them to
Lecture 5 Dynamics. Forces: Newton s First and Second What is a force? It s a pull or a push: F F Force is a quantitative description of the interaction between two physical bodies that causes them to
CHAPTER 3 KINEMATICS IN TWO DIMENSIONS; VECTORS
 CHAPTER 3 KINEMATICS IN TWO DIMENSIONS; VECTORS OBJECTIVES After studying the material of this chapter, the student should be able to: represent the magnitude and direction of a vector using a protractor
CHAPTER 3 KINEMATICS IN TWO DIMENSIONS; VECTORS OBJECTIVES After studying the material of this chapter, the student should be able to: represent the magnitude and direction of a vector using a protractor
Name. MECH 223 Engineering Statics. Midterm 1, February 24 th 2015
 1 Name MECH 223 Engineering Statics Midterm 1, February 24 th 2015 Question 1 (20 + 5 points) (a) (5 points) Form the vector products B C and B C (where B = B ) and use the result to prove the identity
1 Name MECH 223 Engineering Statics Midterm 1, February 24 th 2015 Question 1 (20 + 5 points) (a) (5 points) Form the vector products B C and B C (where B = B ) and use the result to prove the identity
Mathematical review trigonometry vectors Motion in one dimension
 Mathematical review trigonometry vectors Motion in one dimension Used to describe the position of a point in space Coordinate system (frame) consists of a fixed reference point called the origin specific
Mathematical review trigonometry vectors Motion in one dimension Used to describe the position of a point in space Coordinate system (frame) consists of a fixed reference point called the origin specific
Chapter 3. Vectors. θ that the vector forms with i ˆ is 15. I. Vectors and Scalars
 Chapter 3. Vectors I. Vectors and Scalars 1. What type of quantity does the odometer of a car measure? a) vector; b) scalar; c) neither scalar nor vector; d) both scalar and vector. 2. What type of quantity
Chapter 3. Vectors I. Vectors and Scalars 1. What type of quantity does the odometer of a car measure? a) vector; b) scalar; c) neither scalar nor vector; d) both scalar and vector. 2. What type of quantity
Exam 3 Practice Solutions
 Exam 3 Practice Solutions Multiple Choice 1. A thin hoop, a solid disk, and a solid sphere, each with the same mass and radius, are at rest at the top of an inclined plane. If all three are released at
Exam 3 Practice Solutions Multiple Choice 1. A thin hoop, a solid disk, and a solid sphere, each with the same mass and radius, are at rest at the top of an inclined plane. If all three are released at
PHYSICS - CLUTCH CH 01: UNITS & VECTORS.
 !! www.clutchprep.com Physics is the study of natural phenomena, including LOTS of measurements and equations. Physics = math + rules. UNITS IN PHYSICS We measure in nature. Measurements must have. - For
!! www.clutchprep.com Physics is the study of natural phenomena, including LOTS of measurements and equations. Physics = math + rules. UNITS IN PHYSICS We measure in nature. Measurements must have. - For
Chapter 4 NEWTONS LAWS. Newton s 3 Laws Force Diagrams Balanced Forces Unbalanced Forces
 Chapter 4 NEWTONS LAWS Newton s 3 Laws Force Diagrams Balanced Forces Unbalanced Forces Force: a push or a pull Measured in Newton Vector Quantity Contact Force: applied by direct contact Field Force:
Chapter 4 NEWTONS LAWS Newton s 3 Laws Force Diagrams Balanced Forces Unbalanced Forces Force: a push or a pull Measured in Newton Vector Quantity Contact Force: applied by direct contact Field Force:
Unit Workbook 1 Level 4 ENG U8 Mechanical Principles 2018 UniCourse Ltd. All Rights Reserved. Sample
 Pearson BTEC Levels 4 Higher Nationals in Engineering (RQF) Unit 8: Mechanical Principles Unit Workbook 1 in a series of 4 for this unit Learning Outcome 1 Static Mechanical Systems Page 1 of 23 1.1 Shafts
Pearson BTEC Levels 4 Higher Nationals in Engineering (RQF) Unit 8: Mechanical Principles Unit Workbook 1 in a series of 4 for this unit Learning Outcome 1 Static Mechanical Systems Page 1 of 23 1.1 Shafts
Calculating Truss Forces Unit 2 Lesson 2.1 Statics
 alculating Truss Forces alculating Truss Forces Principles of Engineering 22 Forces ompression body being squeezed Tension body being stretched Truss truss is composed of slender members joined together
alculating Truss Forces alculating Truss Forces Principles of Engineering 22 Forces ompression body being squeezed Tension body being stretched Truss truss is composed of slender members joined together
Section 2: Static Equilibrium II- Balancing Torques
 Section 2: Static Equilibrium II- Balancing Torques Last Section: If (ie. Forces up = Forces down and Forces left = Forces right), then the object will have no translatory motion. In other words, the object
Section 2: Static Equilibrium II- Balancing Torques Last Section: If (ie. Forces up = Forces down and Forces left = Forces right), then the object will have no translatory motion. In other words, the object
Chapter 4: Newton s Second Law F = m a. F = m a (4.2)
") Lecture 7: Newton s Laws and Their Applications 1 Chapter 4: Newton s Second Law F = m a First Law: The Law of Inertia An object at rest will remain at rest unless, until acted upon by an external force.
Lecture 7: Newton s Laws and Their Applications 1 Chapter 4: Newton s Second Law F = m a First Law: The Law of Inertia An object at rest will remain at rest unless, until acted upon by an external force.
Chapter Four Holt Physics. Forces and the Laws of Motion
 Chapter Four Holt Physics Forces and the Laws of Motion Physics Force and the study of dynamics 1.Forces - a. Force - a push or a pull. It can change the motion of an object; start or stop movement; and,
Chapter Four Holt Physics Forces and the Laws of Motion Physics Force and the study of dynamics 1.Forces - a. Force - a push or a pull. It can change the motion of an object; start or stop movement; and,
Otterbein University Department of Physics Physics Laboratory Partner s Name: EXPERIMENT D FORCE VECTORS
 Name: Partner s Name: EXPERIMENT 1500-7 2D FORCE VECTORS INTRODUCTION A vector is represented by an arrow: it has a direction and a magnitude (or length). Vectors can be moved around the page without changing
Name: Partner s Name: EXPERIMENT 1500-7 2D FORCE VECTORS INTRODUCTION A vector is represented by an arrow: it has a direction and a magnitude (or length). Vectors can be moved around the page without changing
Figure Two. Then the two vector equations of equilibrium are equivalent to three scalar equations:
 2004- v 10/16 2. The resultant external torque (the vector sum of all external torques) acting on the body must be zero about any origin. These conditions can be written as equations: F = 0 = 0 where the
2004- v 10/16 2. The resultant external torque (the vector sum of all external torques) acting on the body must be zero about any origin. These conditions can be written as equations: F = 0 = 0 where the
Experiment 2 Vectors. using the equations: F x = F cos θ F y = F sin θ. Composing a Vector
 Experiment 2 Vectors Preparation Study for this week's quiz by reviewing the last experiment, reading this week's experiment carefully and by looking up force and vectors in your textbook. Principles A
Experiment 2 Vectors Preparation Study for this week's quiz by reviewing the last experiment, reading this week's experiment carefully and by looking up force and vectors in your textbook. Principles A
Phys101 First Major-111 Zero Version Monday, October 17, 2011 Page: 1
 Monday, October 17, 011 Page: 1 Q1. 1 b The speed-time relation of a moving particle is given by: v = at +, where v is the speed, t t + c is the time and a, b, c are constants. The dimensional formulae
Monday, October 17, 011 Page: 1 Q1. 1 b The speed-time relation of a moving particle is given by: v = at +, where v is the speed, t t + c is the time and a, b, c are constants. The dimensional formulae
What Every Engineer Should Know About Structures Part B Statics Applications
 What Every Engineer Should Know About Structures by Professor Patrick L. Glon, P.E. This is the second course of a series in the area of study of engineering mechanics called Statics and Strength of Materials.
What Every Engineer Should Know About Structures by Professor Patrick L. Glon, P.E. This is the second course of a series in the area of study of engineering mechanics called Statics and Strength of Materials.
Chapter 4. Forces and Newton s Laws of Motion. continued
 Chapter 4 Forces and Newton s Laws of Motion continued Quiz 3 4.7 The Gravitational Force Newton s Law of Universal Gravitation Every particle in the universe exerts an attractive force on every other
Chapter 4 Forces and Newton s Laws of Motion continued Quiz 3 4.7 The Gravitational Force Newton s Law of Universal Gravitation Every particle in the universe exerts an attractive force on every other
variable Formula S or v SI variable Formula S or v SI 4. How is a Newton defined? What does a Newton equal in pounds?
 Newton s Laws 1 1. Define mass variable Formula S or v SI 2. Define inertia, how is inertia related to mass 3. What is a Force? variable Formula S or v SI 4. How is a Newton defined? What does a Newton
Newton s Laws 1 1. Define mass variable Formula S or v SI 2. Define inertia, how is inertia related to mass 3. What is a Force? variable Formula S or v SI 4. How is a Newton defined? What does a Newton