Kinematics of Wheeled Robots
|
|
|
- Amber Norton
- 5 years ago
- Views:
Transcription
1 1 Kinemaics of Wheeled Robos
2 hps:// 2
3 Wheeled Mobile Robos robo can hae one or more wheels ha can proide seering direcional conrol power eer a force agains he ground an ideal wheel is perfecl round perimeer 2πr moes in he direcion perpendicular o is ais 3
4 Wheel 4

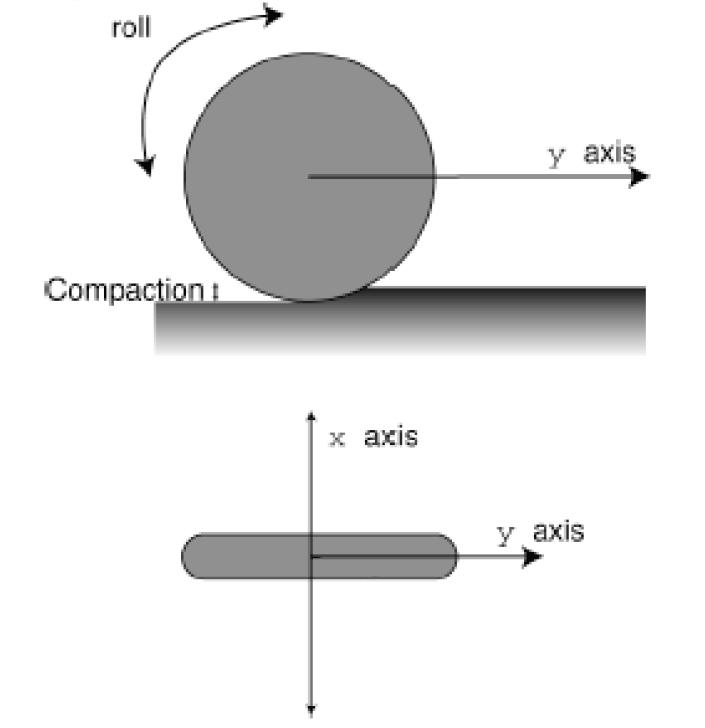
5 Deiaions from Ideal 5
6 Insananeous Cener of Curaure for smooh rolling moion, all wheels in ground conac mus follow a circular pah abou a common ais of reoluion each wheel mus be poining in is correc direcion reole wih an angular eloci consisen wih he moion of he robo each wheel mus reole a is correc speed 6
7 Insananeous Cener of Curaure 7 a 3 wheels wih roll aes inersecing a a common poin he insananeous cener of curaure,. b No eiss. A robo haing wheels shown in a can ehibi smooh rolling moion, whereas a robo wih wheel arrangemen b canno.
8 Casor Wheels proide suppor bu no seering nor propulsion 8

9 Differenial Drie wo independenl drien wheels mouned on a common ais 9
10 Differenial Drie angular eloci abou he defines he wheel ground elociies and l disance beween and righ wheel r R R 2 2 disance beween and lef wheel hps://opencurriculum.org/5481/circular-moion-linear-and-angular-speed/ 10
11 Differenial Drie 11 gien he wheel ground elociies i is eas o sole for he radius, R, and angular eloci ω ineresing cases: l l R r r r 2

12 Tracked Vehicles similar o differenial drie bu relies on ground slip or skid o change direcion kinemaics poorl deermined b moion of reads 12 hp://en.wikipedia.org/wiki/file:tucker-kien-varians.jpg
13 Seered Wheels: Biccle f d 90 h r 13
14 Seered Wheels: Biccle imporan o remember he assumpions in he kinemaic model smooh rolling moion in he plane does no capure all possible moions hp:// 14

15 Mecanum Wheel a normal wheel wih rollers mouned on he circumference hp://blog.makezine.com/archie/2010/04/3d-prinable-mecanum-wheel.hml hps:// hps:// hp://fp.mi.fu-berlin.de/pub/rojas/omniwheel/diegel-bade-brigh-pogieer-tlale.pdf 15
16 Mecanum Wheel AndMark Mecanum wheel specificaion shee hp://d1prrjwm20z9.cloudfron.ne/mecanumwheelspecshee.pdf 16
17 Forward Kinemaics serial manipulaors gien he join ariables, find he pose of he end-effecor mobile robo gien he conrol ariables as a funcion of ime, find he pose of he robo for he differenial drie he conrol ariables are ofen aken o be he ground elociies of he lef and righ wheels i is imporan o noe ha he wheel elociies are needed as funcions of ime; a differenial drie ha moes forward and hen urns righ ends up in a er differen posiion han one ha urns righ hen moes forward! 17
18 Forward Kinemaics robo wih pose [ θ] T moing wih eloci V in a direcion θ measured relaie he ais of {W}: V θ {W} 18
19 Forward Kinemaics for a robo saring wih pose [ 0 0 θ 0 ] T moing wih eloci V in a direcion θ : V θ V cos θ V sin θ V cos V sin d d d 19
20 for differenial drie: Forward Kinemaics 20 r r r d d d sin 2 1 cos 2 1
21 Sensiii o Wheel Veloci r 1 N 1 N , 2 0, σ = 0.05 σ =
22 Sensiii o Wheel Veloci L = 0.2; sigma = 0.05; figure hold on for i = 1:1000 R = 1 + normrnd0, sigma; L = 1 + normrnd0, sigma; hea = 0; = 0; = 0; d = 0.1; for = 0.1:d:10 = * R + L * coshea * d; = * R + L * sinhea * d; hea = hea + 1 / L * R L * d; R = 1 + normrnd0, sigma; L = 1 + normrnd0, sigma; end plo,, 'b.'; end 22
23 23 Mobile Robo Forward Kinemaics
24 Forward Kinemaics : Differenial Drie wha is he posiion of he in {W}? R θ V {W} 24
25 Forward Kinemaics : Differenial Drie Rsin R cos R θ V {W} 25
26 Forward Kinemaics : Differenial Drie assuming smooh rolling moion a each poin in ime he differenial drie is moing in a circular pah cenered on he hus, for a small ineral of ime δ he change in pose can be compued as a roaion abou he R P+ P 26
27 Forward Kinemaics : Differenial Drie compuing he roaion abou he 1. ranslae so ha he moes o he origin of {W} 2. roae abou he origin of {W} 3. ranslae back o he original R P+ P 27
28 Forward Kinemaics : Differenial Drie compuing he roaion abou he 1. ranslae so ha he moes o he origin of {W} 2. roae abou he origin of {W} 3. ranslae back o he original Rsin R cos 28
29 Forward Kinemaics : Differenial Drie compuing he roaion abou he 1. ranslae so ha he moes o he origin of {W} 2. roae abou he origin of {W} 3. ranslae back o he original how much roaion oer he ime ineral? angular eloci * elapsed ime = cos sin sin cos 29
30 Forward Kinemaics : Differenial Drie compuing he roaion abou he 1. ranslae so ha he moes o he origin of {W} 2. roae abou he origin of {W} 3. ranslae back o he original cos sin sin cos 30
31 Forward Kinemaics : Differenial Drie 31 wha abou he orienaion? jus add he roaion for he ime ineral new pose which can be wrien as cos sin sin cos cos sin 0 sin cos
32 Forward Kinemaics: Differenial Drie 32 he preious equaion is alid if i.e., if he differenial drie is no raelling in a sraigh line if hen L R R L sin cos
33 Sensiii o Wheel Veloci r 1 N 1 N , 2 0, σ = 0.05 σ =
34 Sensiii o Wheel Veloci gien he forward kinemaics of he differenial drie i is eas o wrie a simulaion of he moion we need a wa o draw random numbers from a normal disribuion in Malab randnn reurns an n-b-n mari conaining pseudorandom alues drawn from he sandard normal disribuion see mnrnd for random alues from a muliariae normal disribuion 34
35 Sensiii o Wheel Veloci POSE = []; % final pose of robo afer each rial sigma = 0.01; % noise sandard deiaion L = 0.2; % disance beween wheels d = 0.1; % ime sep TRIALS = 1000; % number of rials for rial = 1:TRIALS end -run each rialsee ne slide 35
36 Sensiii o Wheel Veloci r = 1; % iniial righ-wheel eloci l = 1; % iniial lef-wheel eloci pose = [0; 0; 0]; % iniial pose of robo for = 0:d:10 -moe he robo one ime sep - see ne slide end POSE = [POSE pose]; % record final pose afer rial 36
37 Sensiii o Wheel Veloci hea = pose3; if r == l pose = pose + [r * coshea * d; r * sinhea * d; 0]; else omega = r l / L; R = L / 2 * r + l / r l; = pose + [-R * sinhea; R * coshea; 0]; pose = rzomega * d * pose + + [0; 0; omega * d]; end r = 1 + sigma * randn1; l = 1 + sigma * randn1; 37
Brock University Physics 1P21/1P91 Fall 2013 Dr. D Agostino. Solutions for Tutorial 3: Chapter 2, Motion in One Dimension
 Brock Uniersiy Physics 1P21/1P91 Fall 2013 Dr. D Agosino Soluions for Tuorial 3: Chaper 2, Moion in One Dimension The goals of his uorial are: undersand posiion-ime graphs, elociy-ime graphs, and heir
Brock Uniersiy Physics 1P21/1P91 Fall 2013 Dr. D Agosino Soluions for Tuorial 3: Chaper 2, Moion in One Dimension The goals of his uorial are: undersand posiion-ime graphs, elociy-ime graphs, and heir
Unit 1 Test Review Physics Basics, Movement, and Vectors Chapters 1-3
 A.P. Physics B Uni 1 Tes Reiew Physics Basics, Moemen, and Vecors Chapers 1-3 * In sudying for your es, make sure o sudy his reiew shee along wih your quizzes and homework assignmens. Muliple Choice Reiew:
A.P. Physics B Uni 1 Tes Reiew Physics Basics, Moemen, and Vecors Chapers 1-3 * In sudying for your es, make sure o sudy his reiew shee along wih your quizzes and homework assignmens. Muliple Choice Reiew:
One-Dimensional Kinematics
 One-Dimensional Kinemaics One dimensional kinemaics refers o moion along a sraigh line. Een hough we lie in a 3-dimension world, moion can ofen be absraced o a single dimension. We can also describe moion
One-Dimensional Kinemaics One dimensional kinemaics refers o moion along a sraigh line. Een hough we lie in a 3-dimension world, moion can ofen be absraced o a single dimension. We can also describe moion
KINEMATICS IN ONE DIMENSION
 KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
Chapter 3 Kinematics in Two Dimensions
 Chaper 3 KINEMATICS IN TWO DIMENSIONS PREVIEW Two-dimensional moion includes objecs which are moing in wo direcions a he same ime, such as a projecile, which has boh horizonal and erical moion. These wo
Chaper 3 KINEMATICS IN TWO DIMENSIONS PREVIEW Two-dimensional moion includes objecs which are moing in wo direcions a he same ime, such as a projecile, which has boh horizonal and erical moion. These wo
1. The graph below shows the variation with time t of the acceleration a of an object from t = 0 to t = T. a
 Kinemaics Paper 1 1. The graph below shows he ariaion wih ime of he acceleraion a of an objec from = o = T. a T The shaded area under he graph represens change in A. displacemen. B. elociy. C. momenum.
Kinemaics Paper 1 1. The graph below shows he ariaion wih ime of he acceleraion a of an objec from = o = T. a T The shaded area under he graph represens change in A. displacemen. B. elociy. C. momenum.
Physics 101: Lecture 03 Kinematics Today s lecture will cover Textbook Sections (and some Ch. 4)
") Physics 101: Lecure 03 Kinemaics Today s lecure will coer Texbook Secions 3.1-3.3 (and some Ch. 4) Physics 101: Lecure 3, Pg 1 A Refresher: Deermine he force exered by he hand o suspend he 45 kg mass as
Physics 101: Lecure 03 Kinemaics Today s lecure will coer Texbook Secions 3.1-3.3 (and some Ch. 4) Physics 101: Lecure 3, Pg 1 A Refresher: Deermine he force exered by he hand o suspend he 45 kg mass as
INSTANTANEOUS VELOCITY
 INSTANTANEOUS VELOCITY I claim ha ha if acceleraion is consan, hen he elociy is a linear funcion of ime and he posiion a quadraic funcion of ime. We wan o inesigae hose claims, and a he same ime, work
INSTANTANEOUS VELOCITY I claim ha ha if acceleraion is consan, hen he elociy is a linear funcion of ime and he posiion a quadraic funcion of ime. We wan o inesigae hose claims, and a he same ime, work
Roller-Coaster Coordinate System
 Winer 200 MECH 220: Mechanics 2 Roller-Coaser Coordinae Sysem Imagine you are riding on a roller-coaer in which he rack goes up and down, wiss and urns. Your velociy and acceleraion will change (quie abruply),
Winer 200 MECH 220: Mechanics 2 Roller-Coaser Coordinae Sysem Imagine you are riding on a roller-coaer in which he rack goes up and down, wiss and urns. Your velociy and acceleraion will change (quie abruply),
LAB # 2 - Equilibrium (static)
") AB # - Equilibrium (saic) Inroducion Isaac Newon's conribuion o physics was o recognize ha despie he seeming compleiy of he Unierse, he moion of is pars is guided by surprisingly simple aws. Newon's inspiraion
AB # - Equilibrium (saic) Inroducion Isaac Newon's conribuion o physics was o recognize ha despie he seeming compleiy of he Unierse, he moion of is pars is guided by surprisingly simple aws. Newon's inspiraion
Equations of motion for constant acceleration
 Lecure 3 Chaper 2 Physics I 01.29.2014 Equaions of moion for consan acceleraion Course websie: hp://faculy.uml.edu/andriy_danylo/teaching/physicsi Lecure Capure: hp://echo360.uml.edu/danylo2013/physics1spring.hml
Lecure 3 Chaper 2 Physics I 01.29.2014 Equaions of moion for consan acceleraion Course websie: hp://faculy.uml.edu/andriy_danylo/teaching/physicsi Lecure Capure: hp://echo360.uml.edu/danylo2013/physics1spring.hml
Phys 221 Fall Chapter 2. Motion in One Dimension. 2014, 2005 A. Dzyubenko Brooks/Cole
 Phys 221 Fall 2014 Chaper 2 Moion in One Dimension 2014, 2005 A. Dzyubenko 2004 Brooks/Cole 1 Kinemaics Kinemaics, a par of classical mechanics: Describes moion in erms of space and ime Ignores he agen
Phys 221 Fall 2014 Chaper 2 Moion in One Dimension 2014, 2005 A. Dzyubenko 2004 Brooks/Cole 1 Kinemaics Kinemaics, a par of classical mechanics: Describes moion in erms of space and ime Ignores he agen
Physics Notes - Ch. 2 Motion in One Dimension
 Physics Noes - Ch. Moion in One Dimension I. The naure o physical quaniies: scalars and ecors A. Scalar quaniy ha describes only magniude (how much), NOT including direcion; e. mass, emperaure, ime, olume,
Physics Noes - Ch. Moion in One Dimension I. The naure o physical quaniies: scalars and ecors A. Scalar quaniy ha describes only magniude (how much), NOT including direcion; e. mass, emperaure, ime, olume,
Kinematics in two dimensions
 Lecure 5 Phsics I 9.18.13 Kinemaics in wo dimensions Course websie: hp://facul.uml.edu/andri_danlo/teaching/phsicsi Lecure Capure: hp://echo36.uml.edu/danlo13/phsics1fall.hml 95.141, Fall 13, Lecure 5
Lecure 5 Phsics I 9.18.13 Kinemaics in wo dimensions Course websie: hp://facul.uml.edu/andri_danlo/teaching/phsicsi Lecure Capure: hp://echo36.uml.edu/danlo13/phsics1fall.hml 95.141, Fall 13, Lecure 5
Q2.4 Average velocity equals instantaneous velocity when the speed is constant and motion is in a straight line.
 CHAPTER MOTION ALONG A STRAIGHT LINE Discussion Quesions Q. The speedomeer measures he magniude of he insananeous eloci, he speed. I does no measure eloci because i does no measure direcion. Q. Graph (d).
CHAPTER MOTION ALONG A STRAIGHT LINE Discussion Quesions Q. The speedomeer measures he magniude of he insananeous eloci, he speed. I does no measure eloci because i does no measure direcion. Q. Graph (d).
Chapter 12: Velocity, acceleration, and forces
 To Feel a Force Chaper Spring, Chaper : A. Saes of moion For moion on or near he surface of he earh, i is naural o measure moion wih respec o objecs fixed o he earh. The 4 hr. roaion of he earh has a measurable
To Feel a Force Chaper Spring, Chaper : A. Saes of moion For moion on or near he surface of he earh, i is naural o measure moion wih respec o objecs fixed o he earh. The 4 hr. roaion of he earh has a measurable
Estimation of Poses with Particle Filters
 Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
1. Kinematics I: Position and Velocity
 1. Kinemaics I: Posiion and Velociy Inroducion The purpose of his eperimen is o undersand and describe moion. We describe he moion of an objec by specifying is posiion, velociy, and acceleraion. In his
1. Kinemaics I: Posiion and Velociy Inroducion The purpose of his eperimen is o undersand and describe moion. We describe he moion of an objec by specifying is posiion, velociy, and acceleraion. In his
Week 1 Lecture 2 Problems 2, 5. What if something oscillates with no obvious spring? What is ω? (problem set problem)
") Week 1 Lecure Problems, 5 Wha if somehing oscillaes wih no obvious spring? Wha is ω? (problem se problem) Sar wih Try and ge o SHM form E. Full beer can in lake, oscillaing F = m & = ge rearrange: F =
Week 1 Lecure Problems, 5 Wha if somehing oscillaes wih no obvious spring? Wha is ω? (problem se problem) Sar wih Try and ge o SHM form E. Full beer can in lake, oscillaing F = m & = ge rearrange: F =
NEWTON S SECOND LAW OF MOTION
 Course and Secion Dae Names NEWTON S SECOND LAW OF MOTION The acceleraion of an objec is defined as he rae of change of elociy. If he elociy changes by an amoun in a ime, hen he aerage acceleraion during
Course and Secion Dae Names NEWTON S SECOND LAW OF MOTION The acceleraion of an objec is defined as he rae of change of elociy. If he elociy changes by an amoun in a ime, hen he aerage acceleraion during
Chapters 6 & 7: Trigonometric Functions of Angles and Real Numbers. Divide both Sides by 180
 Algebra Chapers & : Trigonomeric Funcions of Angles and Real Numbers Chapers & : Trigonomeric Funcions of Angles and Real Numbers - Angle Measures Radians: - a uni (rad o measure he size of an angle. rad
Algebra Chapers & : Trigonomeric Funcions of Angles and Real Numbers Chapers & : Trigonomeric Funcions of Angles and Real Numbers - Angle Measures Radians: - a uni (rad o measure he size of an angle. rad
WEEK-3 Recitation PHYS 131. of the projectile s velocity remains constant throughout the motion, since the acceleration a x
 WEEK-3 Reciaion PHYS 131 Ch. 3: FOC 1, 3, 4, 6, 14. Problems 9, 37, 41 & 71 and Ch. 4: FOC 1, 3, 5, 8. Problems 3, 5 & 16. Feb 8, 018 Ch. 3: FOC 1, 3, 4, 6, 14. 1. (a) The horizonal componen of he projecile
WEEK-3 Reciaion PHYS 131 Ch. 3: FOC 1, 3, 4, 6, 14. Problems 9, 37, 41 & 71 and Ch. 4: FOC 1, 3, 5, 8. Problems 3, 5 & 16. Feb 8, 018 Ch. 3: FOC 1, 3, 4, 6, 14. 1. (a) The horizonal componen of he projecile
This is an example to show you how SMath can calculate the movement of kinematic mechanisms.
 Dec :5:6 - Kinemaics model of Simple Arm.sm This file is provided for educaional purposes as guidance for he use of he sofware ool. I is no guaraeed o be free from errors or ommissions. The mehods and
Dec :5:6 - Kinemaics model of Simple Arm.sm This file is provided for educaional purposes as guidance for he use of he sofware ool. I is no guaraeed o be free from errors or ommissions. The mehods and
 Page 1 o 13 1. The brighes sar in he nigh sky is α Canis Majoris, also known as Sirius. I lies 8.8 ligh-years away. Express his disance in meers. ( ligh-year is he disance coered by ligh in one year. Ligh
Page 1 o 13 1. The brighes sar in he nigh sky is α Canis Majoris, also known as Sirius. I lies 8.8 ligh-years away. Express his disance in meers. ( ligh-year is he disance coered by ligh in one year. Ligh
Differential Geometry: Revisiting Curvatures
 Differenial Geomery: Reisiing Curaures Curaure and Graphs Recall: hus, up o a roaion in he x-y plane, we hae: f 1 ( x, y) x y he alues 1 and are he principal curaures a p and he corresponding direcions
Differenial Geomery: Reisiing Curaures Curaure and Graphs Recall: hus, up o a roaion in he x-y plane, we hae: f 1 ( x, y) x y he alues 1 and are he principal curaures a p and he corresponding direcions
x i v x t a dx dt t x
 Physics 3A: Basic Physics I Shoup - Miderm Useful Equaions A y A sin A A A y an A y A A = A i + A y j + A z k A * B = A B cos(θ) A B = A B sin(θ) A * B = A B + A y B y + A z B z A B = (A y B z A z B y
Physics 3A: Basic Physics I Shoup - Miderm Useful Equaions A y A sin A A A y an A y A A = A i + A y j + A z k A * B = A B cos(θ) A B = A B sin(θ) A * B = A B + A y B y + A z B z A B = (A y B z A z B y
Some Basic Information about M-S-D Systems
 Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Physics 2107 Moments of Inertia Experiment 1
 Physics 107 Momens o Ineria Experimen 1 Prelab 1 Read he ollowing background/seup and ensure you are amiliar wih he heory required or he experimen. Please also ill in he missing equaions 5, 7 and 9. Background/Seup
Physics 107 Momens o Ineria Experimen 1 Prelab 1 Read he ollowing background/seup and ensure you are amiliar wih he heory required or he experimen. Please also ill in he missing equaions 5, 7 and 9. Background/Seup
Course II. Lesson 7 Applications to Physics. 7A Velocity and Acceleration of a Particle
 Course II Lesson 7 Applicaions o Physics 7A Velociy and Acceleraion of a Paricle Moion in a Sraigh Line : Velociy O Aerage elociy Moion in he -ais + Δ + Δ 0 0 Δ Δ Insananeous elociy d d Δ Δ Δ 0 lim [ m/s
Course II Lesson 7 Applicaions o Physics 7A Velociy and Acceleraion of a Paricle Moion in a Sraigh Line : Velociy O Aerage elociy Moion in he -ais + Δ + Δ 0 0 Δ Δ Insananeous elociy d d Δ Δ Δ 0 lim [ m/s
and v y . The changes occur, respectively, because of the acceleration components a x and a y
 Week 3 Reciaion: Chaper3 : Problems: 1, 16, 9, 37, 41, 71. 1. A spacecraf is raveling wih a veloci of v0 = 5480 m/s along he + direcion. Two engines are urned on for a ime of 84 s. One engine gives he
Week 3 Reciaion: Chaper3 : Problems: 1, 16, 9, 37, 41, 71. 1. A spacecraf is raveling wih a veloci of v0 = 5480 m/s along he + direcion. Two engines are urned on for a ime of 84 s. One engine gives he
Physics 20 Lesson 5 Graphical Analysis Acceleration
 Physics 2 Lesson 5 Graphical Analysis Acceleraion I. Insananeous Velociy From our previous work wih consan speed and consan velociy, we know ha he slope of a posiion-ime graph is equal o he velociy of
Physics 2 Lesson 5 Graphical Analysis Acceleraion I. Insananeous Velociy From our previous work wih consan speed and consan velociy, we know ha he slope of a posiion-ime graph is equal o he velociy of
Two Dimensional Dynamics
 Physics 11: Lecure 6 Two Dimensional Dynamics Today s lecure will coer Chaper 4 Saring Wed Sep 15, W-F oice hours will be in 3 Loomis. Exam I M oice hours will coninue in 36 Loomis Physics 11: Lecure 6,
Physics 11: Lecure 6 Two Dimensional Dynamics Today s lecure will coer Chaper 4 Saring Wed Sep 15, W-F oice hours will be in 3 Loomis. Exam I M oice hours will coninue in 36 Loomis Physics 11: Lecure 6,
Physics 180A Fall 2008 Test points. Provide the best answer to the following questions and problems. Watch your sig figs.
 Physics 180A Fall 2008 Tes 1-120 poins Name Provide he bes answer o he following quesions and problems. Wach your sig figs. 1) The number of meaningful digis in a number is called he number of. When numbers
Physics 180A Fall 2008 Tes 1-120 poins Name Provide he bes answer o he following quesions and problems. Wach your sig figs. 1) The number of meaningful digis in a number is called he number of. When numbers
Differential Geometry: Numerical Integration and Surface Flow
 Differenial Geomery: Numerical Inegraion and Surface Flow [Implici Fairing of Irregular Meshes using Diffusion and Curaure Flow. Desbrun e al., 1999] Energy Minimizaion Recall: We hae been considering
Differenial Geomery: Numerical Inegraion and Surface Flow [Implici Fairing of Irregular Meshes using Diffusion and Curaure Flow. Desbrun e al., 1999] Energy Minimizaion Recall: We hae been considering
IB Physics Kinematics Worksheet
 IB Physics Kinemaics Workshee Wrie full soluions and noes for muliple choice answers. Do no use a calculaor for muliple choice answers. 1. Which of he following is a correc definiion of average acceleraion?
IB Physics Kinemaics Workshee Wrie full soluions and noes for muliple choice answers. Do no use a calculaor for muliple choice answers. 1. Which of he following is a correc definiion of average acceleraion?
a 10.0 (m/s 2 ) 5.0 Name: Date: 1. The graph below describes the motion of a fly that starts out going right V(m/s)
 5.0 Name: Date: 1. The graph below describes the motion of a fly that starts out going right V(m/s)") Name: Dae: Kinemaics Review (Honors. Physics) Complee he following on a separae shee of paper o be urned in on he day of he es. ALL WORK MUST BE SHOWN TO RECEIVE CREDIT. 1. The graph below describes he
Name: Dae: Kinemaics Review (Honors. Physics) Complee he following on a separae shee of paper o be urned in on he day of he es. ALL WORK MUST BE SHOWN TO RECEIVE CREDIT. 1. The graph below describes he
Displacement ( x) x x x
 x x x") Kinemaics Kinemaics is he branch of mechanics ha describes he moion of objecs wihou necessarily discussing wha causes he moion. 1-Dimensional Kinemaics (or 1- Dimensional moion) refers o moion in a sraigh
Kinemaics Kinemaics is he branch of mechanics ha describes he moion of objecs wihou necessarily discussing wha causes he moion. 1-Dimensional Kinemaics (or 1- Dimensional moion) refers o moion in a sraigh
1. VELOCITY AND ACCELERATION
 1. VELOCITY AND ACCELERATION 1.1 Kinemaics Equaions s = u + 1 a and s = v 1 a s = 1 (u + v) v = u + as 1. Displacemen-Time Graph Gradien = speed 1.3 Velociy-Time Graph Gradien = acceleraion Area under
1. VELOCITY AND ACCELERATION 1.1 Kinemaics Equaions s = u + 1 a and s = v 1 a s = 1 (u + v) v = u + as 1. Displacemen-Time Graph Gradien = speed 1.3 Velociy-Time Graph Gradien = acceleraion Area under
Review Equations. Announcements 9/8/09. Table Tennis
 Announcemens 9/8/09 1. Course homepage ia: phsics.bu.edu Class web pages Phsics 105 (Colon J). (Class-wide email sen) Iclicker problem from las ime scores didn ge recorded. Clicker quizzes from lecures
Announcemens 9/8/09 1. Course homepage ia: phsics.bu.edu Class web pages Phsics 105 (Colon J). (Class-wide email sen) Iclicker problem from las ime scores didn ge recorded. Clicker quizzes from lecures
AP Calculus BC Chapter 10 Part 1 AP Exam Problems
 AP Calculus BC Chaper Par AP Eam Problems All problems are NO CALCULATOR unless oherwise indicaed Parameric Curves and Derivaives In he y plane, he graph of he parameric equaions = 5 + and y= for, is a
AP Calculus BC Chaper Par AP Eam Problems All problems are NO CALCULATOR unless oherwise indicaed Parameric Curves and Derivaives In he y plane, he graph of he parameric equaions = 5 + and y= for, is a
10.1 EXERCISES. y 2 t 2. y 1 t y t 3. y e
 66 CHAPTER PARAMETRIC EQUATINS AND PLAR CRDINATES SLUTIN We use a graphing device o produce he graphs for he cases a,,.5,.,,.5,, and shown in Figure 7. Noice ha all of hese curves (ecep he case a ) have
66 CHAPTER PARAMETRIC EQUATINS AND PLAR CRDINATES SLUTIN We use a graphing device o produce he graphs for he cases a,,.5,.,,.5,, and shown in Figure 7. Noice ha all of hese curves (ecep he case a ) have
t A. 3. Which vector has the largest component in the y-direction, as defined by the axes to the right?
 Ke Name Insrucor Phsics 1210 Exam 1 Sepember 26, 2013 Please wrie direcl on he exam and aach oher shees of work if necessar. Calculaors are allowed. No noes or books ma be used. Muliple-choice problems
Ke Name Insrucor Phsics 1210 Exam 1 Sepember 26, 2013 Please wrie direcl on he exam and aach oher shees of work if necessar. Calculaors are allowed. No noes or books ma be used. Muliple-choice problems
Two Dimensional Dynamics
 Physics 11: Lecure 6 Two Dimensional Dynamics Today s lecure will coer Chaper 4 Exam I Physics 11: Lecure 6, Pg 1 Brie Reiew Thus Far Newon s Laws o moion: SF=ma Kinemaics: x = x + + ½ a Dynamics Today
Physics 11: Lecure 6 Two Dimensional Dynamics Today s lecure will coer Chaper 4 Exam I Physics 11: Lecure 6, Pg 1 Brie Reiew Thus Far Newon s Laws o moion: SF=ma Kinemaics: x = x + + ½ a Dynamics Today
Physics for Scientists and Engineers. Chapter 2 Kinematics in One Dimension
 Physics for Scieniss and Engineers Chaper Kinemaics in One Dimension Spring, 8 Ho Jung Paik Kinemaics Describes moion while ignoring he agens (forces) ha caused he moion For now, will consider moion in
Physics for Scieniss and Engineers Chaper Kinemaics in One Dimension Spring, 8 Ho Jung Paik Kinemaics Describes moion while ignoring he agens (forces) ha caused he moion For now, will consider moion in
15. Vector Valued Functions
 1. Vecor Valued Funcions Up o his poin, we have presened vecors wih consan componens, for example, 1, and,,4. However, we can allow he componens of a vecor o be funcions of a common variable. For example,
1. Vecor Valued Funcions Up o his poin, we have presened vecors wih consan componens, for example, 1, and,,4. However, we can allow he componens of a vecor o be funcions of a common variable. For example,
!!"#"$%&#'()!"#&'(*%)+,&',-)./0)1-*23)
!#&'(*%)+,&',-)./0)1-*23)") "#"$%&#'()"#&'(*%)+,&',-)./)1-*) #$%&'()*+,&',-.%,/)*+,-&1*#$)()5*6$+$%*,7&*-'-&1*(,-&*6&,7.$%$+*&%'(*8$&',-,%'-&1*(,-&*6&,79*(&,%: ;..,*&1$&$.$%&'()*1$$.,'&',-9*(&,%)?%*,('&5
"#"$%&#'()"#&'(*%)+,&',-)./)1-*) #$%&'()*+,&',-.%,/)*+,-&1*#$)()5*6$+$%*,7&*-'-&1*(,-&*6&,7.$%$+*&%'(*8$&',-,%'-&1*(,-&*6&,79*(&,%: ;..,*&1$&$.$%&'()*1$$.,'&',-9*(&,%)?%*,('&5
Main Ideas in Class Today
 Main Ideas in Class Toda Inroducion o Falling Appl Consan a Equaions Graphing Free Fall Sole Free Fall Problems Pracice:.45,.47,.53,.59,.61,.63,.69, Muliple Choice.1 Freel Falling Objecs Refers o objecs
Main Ideas in Class Toda Inroducion o Falling Appl Consan a Equaions Graphing Free Fall Sole Free Fall Problems Pracice:.45,.47,.53,.59,.61,.63,.69, Muliple Choice.1 Freel Falling Objecs Refers o objecs
Zürich. ETH Master Course: L Autonomous Mobile Robots Localization II
 Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
4.5 Constant Acceleration
 4.5 Consan Acceleraion v() v() = v 0 + a a() a a() = a v 0 Area = a (a) (b) Figure 4.8 Consan acceleraion: (a) velociy, (b) acceleraion When he x -componen of he velociy is a linear funcion (Figure 4.8(a)),
4.5 Consan Acceleraion v() v() = v 0 + a a() a a() = a v 0 Area = a (a) (b) Figure 4.8 Consan acceleraion: (a) velociy, (b) acceleraion When he x -componen of he velociy is a linear funcion (Figure 4.8(a)),
2.1: What is physics? Ch02: Motion along a straight line. 2.2: Motion. 2.3: Position, Displacement, Distance
 Ch: Moion along a sraigh line Moion Posiion and Displacemen Average Velociy and Average Speed Insananeous Velociy and Speed Acceleraion Consan Acceleraion: A Special Case Anoher Look a Consan Acceleraion
Ch: Moion along a sraigh line Moion Posiion and Displacemen Average Velociy and Average Speed Insananeous Velociy and Speed Acceleraion Consan Acceleraion: A Special Case Anoher Look a Consan Acceleraion
k 1 k 2 x (1) x 2 = k 1 x 1 = k 2 k 1 +k 2 x (2) x k series x (3) k 2 x 2 = k 1 k 2 = k 1+k 2 = 1 k k 2 k series
 x 2 = k 1 x 1 = k 2 k 1 +k 2 x (2) x k series x (3) k 2 x 2 = k 1 k 2 = k 1+k 2 = 1 k k 2 k series") Final Review A Puzzle... Consider wo massless springs wih spring consans k 1 and k and he same equilibrium lengh. 1. If hese springs ac on a mass m in parallel, hey would be equivalen o a single spring
Final Review A Puzzle... Consider wo massless springs wih spring consans k 1 and k and he same equilibrium lengh. 1. If hese springs ac on a mass m in parallel, hey would be equivalen o a single spring
Motion along a Straight Line
 chaper 2 Moion along a Sraigh Line verage speed and average velociy (Secion 2.2) 1. Velociy versus speed Cone in he ebook: fer Eample 2. Insananeous velociy and insananeous acceleraion (Secions 2.3, 2.4)
chaper 2 Moion along a Sraigh Line verage speed and average velociy (Secion 2.2) 1. Velociy versus speed Cone in he ebook: fer Eample 2. Insananeous velociy and insananeous acceleraion (Secions 2.3, 2.4)
Challenge Problems. DIS 203 and 210. March 6, (e 2) k. k(k + 2). k=1. f(x) = k(k + 2) = 1 x k
 k. k(k + 2). k=1. f(x) = k(k + 2) = 1 x k") Challenge Problems DIS 03 and 0 March 6, 05 Choose one of he following problems, and work on i in your group. Your goal is o convince me ha your answer is correc. Even if your answer isn compleely correc,
Challenge Problems DIS 03 and 0 March 6, 05 Choose one of he following problems, and work on i in your group. Your goal is o convince me ha your answer is correc. Even if your answer isn compleely correc,
Lab #2: Kinematics in 1-Dimension
 Reading Assignmen: Chaper 2, Secions 2-1 hrough 2-8 Lab #2: Kinemaics in 1-Dimension Inroducion: The sudy of moion is broken ino wo main areas of sudy kinemaics and dynamics. Kinemaics is he descripion
Reading Assignmen: Chaper 2, Secions 2-1 hrough 2-8 Lab #2: Kinemaics in 1-Dimension Inroducion: The sudy of moion is broken ino wo main areas of sudy kinemaics and dynamics. Kinemaics is he descripion
Welcome Back to Physics 215!
 Welcome Back o Physics 215! (General Physics I) Thurs. Jan 19 h, 2017 Lecure01-2 1 Las ime: Syllabus Unis and dimensional analysis Today: Displacemen, velociy, acceleraion graphs Nex ime: More acceleraion
Welcome Back o Physics 215! (General Physics I) Thurs. Jan 19 h, 2017 Lecure01-2 1 Las ime: Syllabus Unis and dimensional analysis Today: Displacemen, velociy, acceleraion graphs Nex ime: More acceleraion
The study of the motion of a body along a general curve. û N the unit vector normal to the curve. Clearly, these unit vectors change with time, uˆ
 Secion. Curilinear Moion he sudy of he moion of a body along a general cure. We define û he uni ecor a he body, angenial o he cure û he uni ecor normal o he cure Clearly, hese uni ecors change wih ime,
Secion. Curilinear Moion he sudy of he moion of a body along a general cure. We define û he uni ecor a he body, angenial o he cure û he uni ecor normal o he cure Clearly, hese uni ecors change wih ime,
Let us start with a two dimensional case. We consider a vector ( x,
 Roaion marices We consider now roaion marices in wo and hree dimensions. We sar wih wo dimensions since wo dimensions are easier han hree o undersand, and one dimension is a lile oo simple. However, our
Roaion marices We consider now roaion marices in wo and hree dimensions. We sar wih wo dimensions since wo dimensions are easier han hree o undersand, and one dimension is a lile oo simple. However, our
2001 November 15 Exam III Physics 191
 1 November 15 Eam III Physics 191 Physical Consans: Earh s free-fall acceleraion = g = 9.8 m/s 2 Circle he leer of he single bes answer. quesion is worh 1 poin Each 3. Four differen objecs wih masses:
1 November 15 Eam III Physics 191 Physical Consans: Earh s free-fall acceleraion = g = 9.8 m/s 2 Circle he leer of he single bes answer. quesion is worh 1 poin Each 3. Four differen objecs wih masses:
Kinematics in two Dimensions
 Lecure 5 Chaper 4 Phsics I Kinemaics in wo Dimensions Course websie: hp://facul.uml.edu/andri_danlo/teachin/phsicsi PHYS.141 Lecure 5 Danlo Deparmen of Phsics and Applied Phsics Toda we are oin o discuss:
Lecure 5 Chaper 4 Phsics I Kinemaics in wo Dimensions Course websie: hp://facul.uml.edu/andri_danlo/teachin/phsicsi PHYS.141 Lecure 5 Danlo Deparmen of Phsics and Applied Phsics Toda we are oin o discuss:
AP Chemistry--Chapter 12: Chemical Kinetics
 AP Chemisry--Chaper 12: Chemical Kineics I. Reacion Raes A. The area of chemisry ha deals wih reacion raes, or how fas a reacion occurs, is called chemical kineics. B. The rae of reacion depends on he
AP Chemisry--Chaper 12: Chemical Kineics I. Reacion Raes A. The area of chemisry ha deals wih reacion raes, or how fas a reacion occurs, is called chemical kineics. B. The rae of reacion depends on he
A. Using Newton s second law in one dimension, F net. , write down the differential equation that governs the motion of the block.
 Simple SIMPLE harmonic HARMONIC moion MOTION I. Differenial equaion of moion A block is conneced o a spring, one end of which is aached o a wall. (Neglec he mass of he spring, and assume he surface is
Simple SIMPLE harmonic HARMONIC moion MOTION I. Differenial equaion of moion A block is conneced o a spring, one end of which is aached o a wall. (Neglec he mass of he spring, and assume he surface is
From Particles to Rigid Bodies
 Rigid Body Dynamics From Paricles o Rigid Bodies Paricles No roaions Linear velociy v only Rigid bodies Body roaions Linear velociy v Angular velociy ω Rigid Bodies Rigid bodies have boh a posiion and
Rigid Body Dynamics From Paricles o Rigid Bodies Paricles No roaions Linear velociy v only Rigid bodies Body roaions Linear velociy v Angular velociy ω Rigid Bodies Rigid bodies have boh a posiion and
s in boxe wers ans Put
 Pu answers in boxes Main Ideas in Class Toda Inroducion o Falling Appl Old Equaions Graphing Free Fall Sole Free Fall Problems Pracice:.45,.47,.53,.59,.61,.63,.69, Muliple Choice.1 Freel Falling Objecs
Pu answers in boxes Main Ideas in Class Toda Inroducion o Falling Appl Old Equaions Graphing Free Fall Sole Free Fall Problems Pracice:.45,.47,.53,.59,.61,.63,.69, Muliple Choice.1 Freel Falling Objecs
Trajectory planning in Cartesian space
 Roboics 1 Trajecory planning in Caresian space Prof. Alessandro De Luca Roboics 1 1 Trajecories in Caresian space in general, he rajecory planning mehods proposed in he join space can be applied also in
Roboics 1 Trajecory planning in Caresian space Prof. Alessandro De Luca Roboics 1 1 Trajecories in Caresian space in general, he rajecory planning mehods proposed in he join space can be applied also in
Of all of the intellectual hurdles which the human mind has confronted and has overcome in the last fifteen hundred years, the one which seems to me
 Of all of he inellecual hurdles which he human mind has confroned and has overcome in he las fifeen hundred years, he one which seems o me o have been he mos amazing in characer and he mos supendous in
Of all of he inellecual hurdles which he human mind has confroned and has overcome in he las fifeen hundred years, he one which seems o me o have been he mos amazing in characer and he mos supendous in
Kinematics and kinematic functions
 Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables and vice versa Direc Posiion
Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables and vice versa Direc Posiion
Two Coupled Oscillators / Normal Modes
 Lecure 3 Phys 3750 Two Coupled Oscillaors / Normal Modes Overview and Moivaion: Today we ake a small, bu significan, sep owards wave moion. We will no ye observe waves, bu his sep is imporan in is own
Lecure 3 Phys 3750 Two Coupled Oscillaors / Normal Modes Overview and Moivaion: Today we ake a small, bu significan, sep owards wave moion. We will no ye observe waves, bu his sep is imporan in is own
PHYSICS 149: Lecture 9
 PHYSICS 149: Lecure 9 Chaper 3 3.2 Velociy and Acceleraion 3.3 Newon s Second Law of Moion 3.4 Applying Newon s Second Law 3.5 Relaive Velociy Lecure 9 Purdue Universiy, Physics 149 1 Velociy (m/s) The
PHYSICS 149: Lecure 9 Chaper 3 3.2 Velociy and Acceleraion 3.3 Newon s Second Law of Moion 3.4 Applying Newon s Second Law 3.5 Relaive Velociy Lecure 9 Purdue Universiy, Physics 149 1 Velociy (m/s) The
Twin Paradox Revisited
 Twin Parado Revisied Relaiviy and Asrophysics Lecure 19 Terry Herer Ouline Simulaneiy Again Sample Problem L- Twin Parado Revisied Time dilaion viewpoin Lengh conracion viewpoin Parado & why i s no! Problem
Twin Parado Revisied Relaiviy and Asrophysics Lecure 19 Terry Herer Ouline Simulaneiy Again Sample Problem L- Twin Parado Revisied Time dilaion viewpoin Lengh conracion viewpoin Parado & why i s no! Problem
Non-uniform circular motion *
 OpenSax-CNX module: m14020 1 Non-uniform circular moion * Sunil Kumar Singh This work is produced by OpenSax-CNX and licensed under he Creaive Commons Aribuion License 2.0 Wha do we mean by non-uniform
OpenSax-CNX module: m14020 1 Non-uniform circular moion * Sunil Kumar Singh This work is produced by OpenSax-CNX and licensed under he Creaive Commons Aribuion License 2.0 Wha do we mean by non-uniform
10.6 Parametric Equations
 0_006.qd /8/05 9:05 AM Page 77 Secion 0.6 77 Parameric Equaions 0.6 Parameric Equaions Wha ou should learn Evaluae ses of parameric equaions for given values of he parameer. Skech curves ha are represened
0_006.qd /8/05 9:05 AM Page 77 Secion 0.6 77 Parameric Equaions 0.6 Parameric Equaions Wha ou should learn Evaluae ses of parameric equaions for given values of he parameer. Skech curves ha are represened
Integration of the equation of motion with respect to time rather than displacement leads to the equations of impulse and momentum.
 Inegraion of he equaion of moion wih respec o ime raher han displacemen leads o he equaions of impulse and momenum. These equaions greal faciliae he soluion of man problems in which he applied forces ac
Inegraion of he equaion of moion wih respec o ime raher han displacemen leads o he equaions of impulse and momenum. These equaions greal faciliae he soluion of man problems in which he applied forces ac
Name: Total Points: Multiple choice questions [120 points]
![Name: Total Points: Multiple choice questions [120 points]](/thumbs/88/115221528.jpg "Name: Total Points: Multiple choice questions [120 points]") Name: Toal Poins: (Las) (Firs) Muliple choice quesions [1 poins] Answer all of he following quesions. Read each quesion carefully. Fill he correc bubble on your scanron shee. Each correc answer is worh
Name: Toal Poins: (Las) (Firs) Muliple choice quesions [1 poins] Answer all of he following quesions. Read each quesion carefully. Fill he correc bubble on your scanron shee. Each correc answer is worh
Physics 3A: Basic Physics I Shoup Sample Midterm. Useful Equations. x f. x i v x. a x. x i. v xi v xf. 2a x f x i. y f. a r.
 Physics 3A: Basic Physics I Shoup Sample Miderm Useful Equaions A y Asin A A x A y an A y A x A = A x i + A y j + A z k A * B = A B cos(θ) A x B = A B sin(θ) A * B = A x B x + A y B y + A z B z A x B =
Physics 3A: Basic Physics I Shoup Sample Miderm Useful Equaions A y Asin A A x A y an A y A x A = A x i + A y j + A z k A * B = A B cos(θ) A x B = A B sin(θ) A * B = A x B x + A y B y + A z B z A x B =
Angular Motion, Speed and Velocity
 Add Imporan Angular Moion, Speed and Velociy Page: 163 Noe/Cue Here Angular Moion, Speed and Velociy NGSS Sandard: N/A MA Curriculum Framework (006): 1.1, 1. AP Phyic 1 Learning Objecive: 3.A.1.1, 3.A.1.3
Add Imporan Angular Moion, Speed and Velociy Page: 163 Noe/Cue Here Angular Moion, Speed and Velociy NGSS Sandard: N/A MA Curriculum Framework (006): 1.1, 1. AP Phyic 1 Learning Objecive: 3.A.1.1, 3.A.1.3
Bias in Conditional and Unconditional Fixed Effects Logit Estimation: a Correction * Tom Coupé
 Bias in Condiional and Uncondiional Fixed Effecs Logi Esimaion: a Correcion * Tom Coupé Economics Educaion and Research Consorium, Naional Universiy of Kyiv Mohyla Academy Address: Vul Voloska 10, 04070
Bias in Condiional and Uncondiional Fixed Effecs Logi Esimaion: a Correcion * Tom Coupé Economics Educaion and Research Consorium, Naional Universiy of Kyiv Mohyla Academy Address: Vul Voloska 10, 04070
Chapter 2. Motion along a straight line
 Chaper Moion along a sraigh line Kinemaics & Dynamics Kinemaics: Descripion of Moion wihou regard o is cause. Dynamics: Sudy of principles ha relae moion o is cause. Basic physical ariables in kinemaics
Chaper Moion along a sraigh line Kinemaics & Dynamics Kinemaics: Descripion of Moion wihou regard o is cause. Dynamics: Sudy of principles ha relae moion o is cause. Basic physical ariables in kinemaics
Chapter 15 Oscillatory Motion I
 Chaper 15 Oscillaory Moion I Level : AP Physics Insrucor : Kim Inroducion A very special kind of moion occurs when he force acing on a body is proporional o he displacemen of he body from some equilibrium
Chaper 15 Oscillaory Moion I Level : AP Physics Insrucor : Kim Inroducion A very special kind of moion occurs when he force acing on a body is proporional o he displacemen of he body from some equilibrium
Velocity is a relative quantity
 Veloci is a relaie quani Disenangling Coordinaes PHY2053, Fall 2013, Lecure 6 Newon s Laws 2 PHY2053, Fall 2013, Lecure 6 Newon s Laws 3 R. Field 9/6/2012 Uniersi of Florida PHY 2053 Page 8 Reference Frames
Veloci is a relaie quani Disenangling Coordinaes PHY2053, Fall 2013, Lecure 6 Newon s Laws 2 PHY2053, Fall 2013, Lecure 6 Newon s Laws 3 R. Field 9/6/2012 Uniersi of Florida PHY 2053 Page 8 Reference Frames
Chapter 1 Rotational dynamics 1.1 Angular acceleration
 Chaper Roaional dynamics. Angular acceleraion Learning objecives: Wha do we mean by angular acceleraion? How can we calculae he angular acceleraion of a roaing objec when i speeds up or slows down? How
Chaper Roaional dynamics. Angular acceleraion Learning objecives: Wha do we mean by angular acceleraion? How can we calculae he angular acceleraion of a roaing objec when i speeds up or slows down? How
PHYS 100: Lecture 2. Motion at Constant Acceleration. Relative Motion: Reference Frames. x x = v t + a t. x = vdt. v = adt. x Tortoise.
 a PHYS 100: Lecure 2 Moion a Consan Acceleraion a 0 0 Area a 0 a 0 v ad v v0 a0 v 0 x vd 0 A(1/2)( v) Area v 0 v v-v 0 v 0 x x v + a 1 0 0 2 0 2 Relaive Moion: Reference Frames x d Achilles Toroise x Toroise
a PHYS 100: Lecure 2 Moion a Consan Acceleraion a 0 0 Area a 0 a 0 v ad v v0 a0 v 0 x vd 0 A(1/2)( v) Area v 0 v v-v 0 v 0 x x v + a 1 0 0 2 0 2 Relaive Moion: Reference Frames x d Achilles Toroise x Toroise
The fundamental mass balance equation is ( 1 ) where: I = inputs P = production O = outputs L = losses A = accumulation
 where: I = inputs P = production O = outputs L = losses A = accumulation") Hea (iffusion) Equaion erivaion of iffusion Equaion The fundamenal mass balance equaion is I P O L A ( 1 ) where: I inpus P producion O oupus L losses A accumulaion Assume ha no chemical is produced or
Hea (iffusion) Equaion erivaion of iffusion Equaion The fundamenal mass balance equaion is I P O L A ( 1 ) where: I inpus P producion O oupus L losses A accumulaion Assume ha no chemical is produced or
Ground Rules. PC1221 Fundamentals of Physics I. Kinematics. Position. Lectures 3 and 4 Motion in One Dimension. A/Prof Tay Seng Chuan
 Ground Rules PC11 Fundamenals of Physics I Lecures 3 and 4 Moion in One Dimension A/Prof Tay Seng Chuan 1 Swich off your handphone and pager Swich off your lapop compuer and keep i No alking while lecure
Ground Rules PC11 Fundamenals of Physics I Lecures 3 and 4 Moion in One Dimension A/Prof Tay Seng Chuan 1 Swich off your handphone and pager Swich off your lapop compuer and keep i No alking while lecure
2002 November 14 Exam III Physics 191
 November 4 Exam III Physics 9 Physical onsans: Earh s free-fall acceleraion = g = 9.8 m/s ircle he leer of he single bes answer. quesion is worh poin Each 3. Four differen objecs wih masses: m = kg, m
November 4 Exam III Physics 9 Physical onsans: Earh s free-fall acceleraion = g = 9.8 m/s ircle he leer of he single bes answer. quesion is worh poin Each 3. Four differen objecs wih masses: m = kg, m
Objectives. To develop the principle of linear impulse and momentum for a particle. To study the conservation of linear momentum for
 Impulse & Momenum Objecies To deelop he principle of linear impulse and momenum for a paricle. To sudy he conseraion of linear momenum for paricles. To analyze he mechanics of impac. To inroduce he concep
Impulse & Momenum Objecies To deelop he principle of linear impulse and momenum for a paricle. To sudy he conseraion of linear momenum for paricles. To analyze he mechanics of impac. To inroduce he concep
TP A.14 The effects of cut angle, speed, and spin on object ball throw
 echnical proof echnical proof TP A.14 The effecs of cu angle, speed, and spin on objec ball hrow supporing: The Illusraed Principles of Pool and illiards hp://billiards.colosae.edu by Daid G. Alciaore,
echnical proof echnical proof TP A.14 The effecs of cu angle, speed, and spin on objec ball hrow supporing: The Illusraed Principles of Pool and illiards hp://billiards.colosae.edu by Daid G. Alciaore,
Solution: b All the terms must have the dimension of acceleration. We see that, indeed, each term has the units of acceleration
 PHYS 54 Tes Pracice Soluions Spring 8 Q: [4] Knowing ha in he ne epression a is acceleraion, v is speed, is posiion and is ime, from a dimensional v poin of view, he equaion a is a) incorrec b) correc
PHYS 54 Tes Pracice Soluions Spring 8 Q: [4] Knowing ha in he ne epression a is acceleraion, v is speed, is posiion and is ime, from a dimensional v poin of view, he equaion a is a) incorrec b) correc
Physics 235 Chapter 2. Chapter 2 Newtonian Mechanics Single Particle
 Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
PHYSICS 220 Lecture 02 Motion, Forces, and Newton s Laws Textbook Sections
 PHYSICS 220 Lecure 02 Moion, Forces, and Newon s Laws Texbook Secions 2.2-2.4 Lecure 2 Purdue Universiy, Physics 220 1 Overview Las Lecure Unis Scienific Noaion Significan Figures Moion Displacemen: Δx
PHYSICS 220 Lecure 02 Moion, Forces, and Newon s Laws Texbook Secions 2.2-2.4 Lecure 2 Purdue Universiy, Physics 220 1 Overview Las Lecure Unis Scienific Noaion Significan Figures Moion Displacemen: Δx
3, so θ = arccos
 Mahemaics 210 Professor Alan H Sein Monday, Ocober 1, 2007 SOLUTIONS This problem se is worh 50 poins 1 Find he angle beween he vecors (2, 7, 3) and (5, 2, 4) Soluion: Le θ be he angle (2, 7, 3) (5, 2,
Mahemaics 210 Professor Alan H Sein Monday, Ocober 1, 2007 SOLUTIONS This problem se is worh 50 poins 1 Find he angle beween he vecors (2, 7, 3) and (5, 2, 4) Soluion: Le θ be he angle (2, 7, 3) (5, 2,
MEI Mechanics 1 General motion. Section 1: Using calculus
 Soluions o Exercise MEI Mechanics General moion Secion : Using calculus. s 4 v a 6 4 4 When =, v 4 a 6 4 6. (i) When = 0, s = -, so he iniial displacemen = - m. s v 4 When = 0, v = so he iniial velociy
Soluions o Exercise MEI Mechanics General moion Secion : Using calculus. s 4 v a 6 4 4 When =, v 4 a 6 4 6. (i) When = 0, s = -, so he iniial displacemen = - m. s v 4 When = 0, v = so he iniial velociy
Physics 101 Fall 2006: Exam #1- PROBLEM #1
 Physics 101 Fall 2006: Exam #1- PROBLEM #1 1. Problem 1. (+20 ps) (a) (+10 ps) i. +5 ps graph for x of he rain vs. ime. The graph needs o be parabolic and concave upward. ii. +3 ps graph for x of he person
Physics 101 Fall 2006: Exam #1- PROBLEM #1 1. Problem 1. (+20 ps) (a) (+10 ps) i. +5 ps graph for x of he rain vs. ime. The graph needs o be parabolic and concave upward. ii. +3 ps graph for x of he person
2016 Possible Examination Questions. Robotics CSCE 574
 206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
HW6: MRI Imaging Pulse Sequences (7 Problems for 100 pts)
") HW6: MRI Imaging Pulse Sequences (7 Problems for 100 ps) GOAL The overall goal of HW6 is o beer undersand pulse sequences for MRI image reconsrucion. OBJECTIVES 1) Design a spin echo pulse sequence o image
HW6: MRI Imaging Pulse Sequences (7 Problems for 100 ps) GOAL The overall goal of HW6 is o beer undersand pulse sequences for MRI image reconsrucion. OBJECTIVES 1) Design a spin echo pulse sequence o image
INDEX. Transient analysis 1 Initial Conditions 1
 INDEX Secion Page Transien analysis 1 Iniial Condiions 1 Please inform me of your opinion of he relaive emphasis of he review maerial by simply making commens on his page and sending i o me a: Frank Mera
INDEX Secion Page Transien analysis 1 Iniial Condiions 1 Please inform me of your opinion of he relaive emphasis of he review maerial by simply making commens on his page and sending i o me a: Frank Mera
copper ring magnetic field
 IB PHYSICS: Magneic Fields, lecromagneic Inducion, Alernaing Curren 1. This quesion is abou elecromagneic inducion. In 1831 Michael Faraday demonsraed hree ways of inducing an elecric curren in a ring
IB PHYSICS: Magneic Fields, lecromagneic Inducion, Alernaing Curren 1. This quesion is abou elecromagneic inducion. In 1831 Michael Faraday demonsraed hree ways of inducing an elecric curren in a ring
Today: Graphing. Note: I hope this joke will be funnier (or at least make you roll your eyes and say ugh ) after class. v (miles per hour ) Time
 after class. v (miles per hour ) Time") +v Today: Graphing v (miles per hour ) 9 8 7 6 5 4 - - Time Noe: I hope his joke will be funnier (or a leas make you roll your eyes and say ugh ) afer class. Do yourself a favor! Prof Sarah s fail-safe
+v Today: Graphing v (miles per hour ) 9 8 7 6 5 4 - - Time Noe: I hope his joke will be funnier (or a leas make you roll your eyes and say ugh ) afer class. Do yourself a favor! Prof Sarah s fail-safe
Chapter 15: Phenomena. Chapter 15 Chemical Kinetics. Reaction Rates. Reaction Rates R P. Reaction Rates. Rate Laws
 Chaper 5: Phenomena Phenomena: The reacion (aq) + B(aq) C(aq) was sudied a wo differen emperaures (98 K and 35 K). For each emperaure he reacion was sared by puing differen concenraions of he 3 species
Chaper 5: Phenomena Phenomena: The reacion (aq) + B(aq) C(aq) was sudied a wo differen emperaures (98 K and 35 K). For each emperaure he reacion was sared by puing differen concenraions of he 3 species
Basilio Bona ROBOTICA 03CFIOR 1
 Indusrial Robos Kinemaics 1 Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables
Indusrial Robos Kinemaics 1 Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables
THE 2-BODY PROBLEM. FIGURE 1. A pair of ellipses sharing a common focus. (c,b) c+a ROBERT J. VANDERBEI
 c+a ROBERT J. VANDERBEI") THE 2-BODY PROBLEM ROBERT J. VANDERBEI ABSTRACT. In his shor noe, we show ha a pair of ellipses wih a common focus is a soluion o he 2-body problem. INTRODUCTION. Solving he 2-body problem from scrach
THE 2-BODY PROBLEM ROBERT J. VANDERBEI ABSTRACT. In his shor noe, we show ha a pair of ellipses wih a common focus is a soluion o he 2-body problem. INTRODUCTION. Solving he 2-body problem from scrach