Learning Deep Architectures
|
|
|
- Beverly Peters
- 5 years ago
- Views:
Transcription
1 Learning Deep Architectures Yoshua Bengio, U. Montreal CIFAR NCAP Summer School 2009 August 6th, 2009, Montreal Main reference: Learning Deep Architectures for AI, Y. Bengio, to appear in Foundations and Trends in Machine Learning, available on my web page. Thanks to: Aaron Courville, Pascal Vincent, Dumitru Erhan, Olivier Delalleau, Olivier Breuleux, Yann LeCun, Guillaume Desjardins, Pascal Lamblin, James Bergstra, Nicolas Le Roux, Max Welling, Myriam Côté, Jérôme Louradour, Pierre-Antoine Manzagol, Ronan Collobert, Jason Weston
2 Deep Architectures Work Well Beating shallow neural networks on vision and NLP tasks Beating SVMs on visions tasks from pixels (and handling dataset sizes that SVMs cannot handle in NLP) Reaching state-of-the-art performance in NLP Beating deep neural nets without unsupervised component Learn visual features similar to V1 and V2 neurons
3 Deep Motivations Brains have a deep architecture Humans organize their ideas hierarchically, through composition of simpler ideas Insufficiently deep architectures can be exponentially inefficient Distributed (possibly sparse) representations are necessary to achieve non-local generalization, exponentially more efficient than 1-of-N enumeration latent variable values Multiple levels of latent variables allow combinatorial sharing of statistical strength

4 Locally Capture the Variations

5 Easy with Few Variations

6 The Curse of Dimensionality To generalise locally, need representative exemples for all possible variations!
7 Limits of Local Generalization: Theoretical Results (Bengio & Delalleau 2007) Theorem: Gaussian kernel machines need at least k examples to learn a function that has 2k zero-crossings along some line Theorem: For a Gaussian kernel machine to learn some maximally varying functions over d inputs require O(2 d ) examples

8 Curse of Dimensionality When Generalizing Locally on a Manifold
9 How to Beat the Curse of Many Factors of Variation? Compositionality: exponential gain in representational power Distributed representations Deep architecture
10 Distributed Representations Many neurons active simultaneously Input represented by the activation of a set of features that are not mutually exclusive Can be exponentially more efficient than local representations

11 Local vs Distributed


12 Neuro-cognitive inspiration Brains use a distributed representation Brains use a deep architecture Brains heavily use unsupervised learning Brains learn simpler tasks first Human brains developed with society / culture / education

13 Deep Architecture in the Brain Area V4 Higher level visual abstractions Area V2 Primitive shape detectors Area V1 Edge detectors Retina pixels

14 Deep Architecture in our Mind Humans organize their ideas and concepts hierarchically Humans first learn simpler concepts and then compose them to represent more abstract ones Engineers break-up solutions into multiple levels of abstraction and processing Want to learn / discover these concepts
15 Deep Architectures and Sharing Statistical Strength, Multi-Task Learning Generalizing better to new tasks is crucial to approach AI task 1 output y1 task 2 output y2 task 3 output y3 Deep architectures learn good intermediate representations that can be shared across tasks shared intermediate representation h A good representation is one that makes sense for many tasks raw input x
16 Feature and Sub-Feature Sharing Different tasks can share the same high-level feature Different high-level features can be built from the same set of lower-level features More levels = up to exponential gain in representational efficiency task 1 output y1 task N output yn High-level features Low-level features
17 Architecture Depth Depth = 4 Depth = 3
18 Deep Architectures are More Expressive 2 layers of Logic gates Formal neurons RBF units = universal approximator Theorems for all 3: (Hastad et al 86 & 91, Bengio et al 2007) Functions compactly represented with k layers may require exponential size with k-1 layers n n
19 Sharing Components in a Deep Architecture Polynomial expressed with shared components: advantage of depth may grow exponentially
20 How to train Deep Architecture? Great expressive power of deep architectures How to train them?
21 The Deep Breakthrough Before 2006, training deep architectures was unsuccessful, except for convolutional neural nets Hinton, Osindero & Teh «A Fast Learning Algorithm for Deep Belief Nets», Neural Computation, 2006 Bengio, Lamblin, Popovici, Larochelle «Greedy Layer-Wise Training of Deep Networks», NIPS 2006 Ranzato, Poultney, Chopra, LeCun «Efficient Learning of Sparse Representations with an Energy-Based Model», NIPS 2006
22 Greedy Layer-Wise Pre-Training Stacking Restricted Boltzmann Machines (RBM) Deep Belief Network (DBN) Supervised deep neural network
23 Good Old Multi-Layer Neural Net Each layer outputs vector from of previous layer with params (vector) and (matrix). Output layer predicts parametrized distribution of target variable Y given input
24 Training Multi-Layer Neural Nets Outputs: e.g. multinomial for multiclass classification with softmax output units Parameters are trained by gradient-based optimization of training criterion involving conditional log-likelihood, e.g.
25 Effect of Unsupervised Pre-training AISTATS 2009
26 Effect of Depth w/o pre-training with pre-training
27 Boltzman Machines and MRFs Boltzmann machines: (Hinton 84) Markov Random Fields: More interesting with latent variables!

28 Restricted Boltzman Machine The most popular building block for deep architectures hidden Bipartite undirected graphical model observed

29 RBM with (image, label) visible units Can predict a subset y of the visible units given the others x hidden Exactly if y takes only few values image Gibbs sampling o/w label
30 RBMs are Universal Approximators (LeRoux & Bengio 2008, Neural Comp.) Adding one hidden unit (with proper choice of parameters) guarantees increasing likelihood With enough hidden units, can perfectly model any discrete distribution RBMs with variable nb of hidden units = non-parametric Optimal training criterion for RBMs which will be stacked into a DBN is not the RBM likelihood
31 RBM Conditionals Factorize
32 RBM Energy Gives Binomial Neurons


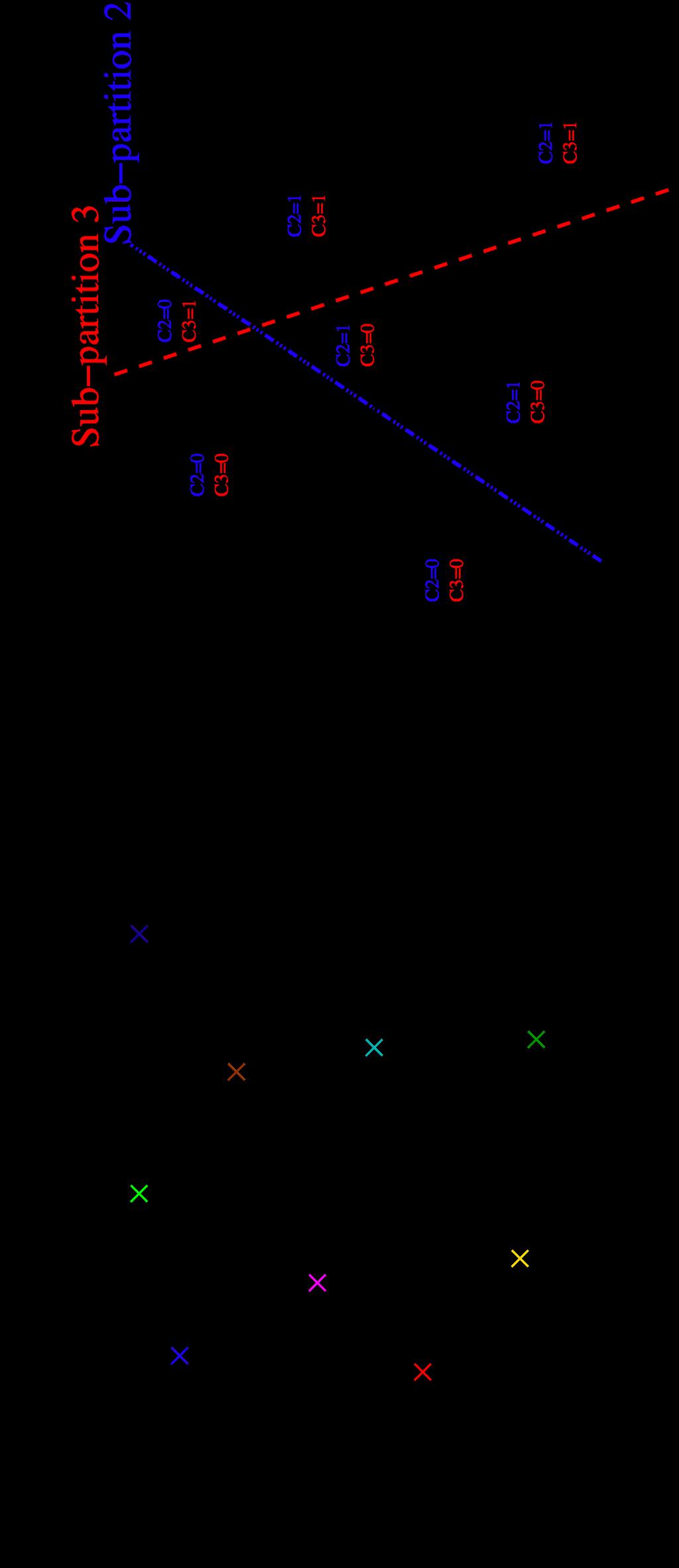
33 RBM Hidden Units Carve Input Space h 1 h 2 h 3 x 1 x 2
34 Gibbs Sampling in RBMs h 1 ~ P(h x 1 ) h 2 ~ P(h x 2 ) h 3 ~ P(h x 3 ) x 1 x 2 ~ P(x h 1 ) x 3 ~ P(x h 2 ) P(h x) and P(x h) factorize Easy inference Convenient Gibbs sampling x h x h

35 Problems with Gibbs Sampling In practice, Gibbs sampling does not always mix well RBM trained by CD on MNIST Chains from random state Chains from real digits
36 RBM Free Energy Free Energy = equivalent energy when marginalizing Can be computed exactly and efficiently in RBMs Marginal likelihood P(x) tractable up to partition function Z
37 Factorization of the Free Energy Let the energy have the following general form: Then
38 Energy-Based Models Gradient
39 Boltzmann Machine Gradient Gradient has two components: positive phase negative phase In RBMs, easy to sample or sum over h x Difficult part: sampling from P(x), typically with a Markov chain
40 Training RBMs Contrastive Divergence: (CD-k) Persistent CD: (PCD) start negative Gibbs chain at observed x, run k Gibbs steps run negative Gibbs chain in background while weights slowly change Fast PCD: two sets of weights, one with a large learning rate only used for negative phase, quickly exploring modes Herding: Deterministic near-chaos dynamical system defines both learning and sampling Tempered MCMC: use higher temperature to escape modes
41 Contrastive Divergence Contrastive Divergence (CD-k): start negative phase block Gibbs chain at observed x, run k Gibbs steps (Hinton 2002) h ~ P(h x) h ~ P(h x ) Observed x positive phase k = 2 steps Sampled x negative phase Free Energy push down x x push up
42 Persistent CD (PCD) Run negative Gibbs chain in background while weights slowly change (Younes 2000, Tieleman 2008): Guarantees (Younes 89, 2000; Yuille 2004) If learning rate decreases in 1/t, chain mixes before parameters change too much, chain stays converged when parameters change h ~ P(h x) Observed x (positive phase) previous x new x
43 Persistent CD with large learning rate Negative phase samples quickly push up the energy of wherever they are and quickly move to another mode FreeEnergy push down x x push up
44 Persistent CD with large step size Negative phase samples quickly push up the energy of wherever they are and quickly move to another mode FreeEnergy push down x x
45 Persistent CD with large learning rate Negative phase samples quickly push up the energy of wherever they are and quickly move to another mode FreeEnergy push down x x push up
46 Fast Persistent CD and Herding Exploit impressively faster mixing achieved when parameters change quickly (large learning rate) while sampling Fast PCD: two sets of weights, one with a large learning rate only used for negative phase, quickly exploring modes Herding (see Max Welling s ICML, UAI and workshop talks): 0-temperature MRFs and RBMs, only use fast weights
47 Herding MRFs Consider 0-temperature MRF with state s and weights w Fully observed case, observe values s +, dynamical system where s - and W evolve Then statistics of samples s - match the data s statistics, even if approximate max, as long as w remains bounded
48 Herding RBMs Hidden part h of the state s = (x,h) Binomial state variables s i {-1,1} Statistics f s i, s i s j Optimize h given x in positive phase the In practice, greedy maximization works, exploiting RBM structure


49 Fast Mixing with Herding FPCD Herding
50 The Sampler as a Generative Model Instead of the traditional clean separation between model and sampling procedure Consider the overall effect of combining some adaptive procedure with a sampling procedure as the generative model Can be evaluated as such (without reference to some underlying probability model) Training data (x,y) Sampled data y Query inputs x
51 Tempered MCMC Annealing from high-temperature worked well for estimating log-likelihood (AIS) Consider multiple chains at different temperatures and reversible swaps between adjacent chains Higher temperature chains can escape modes Model samples are from T=1 Sample Generation Procedure Training Procedure TMCMC Gibbs (ramdom start) Gibbs (test start) TMCMC ± ± ± 2.88 PCD ± ± ± 2.99 CD ± ± ± 6.17
52 Deep Belief Networks DBN = sigmoidal belief net with RBM joint for top two layers Top-level RBM h3 h2 Sampling: Sample from top RMB Sample from level k given k+1 Level k given level k+1 = same parametrization as RBM conditional: stacking RBMs DBN sampled x h1
53 From RBM to DBN RBM specifies P(v,h) from P(v h) and P(h v) Implicitly defines P(v) and P(h) P(h 1,h 2 ) = RBM2 P(x h 1 ) from RBM1 h2 h1 Keep P(v h) from 1 st RBM and replace P(h) by the distribution generated by 2 nd level RBM sampled x
54 Deep Belief Networks Easy approximate inference P(h k+1 h k ) approximated from the associated RBM Approximation because P(h k+1 ) differs between RBM and DBN Training: Variational bound justifies greedy layerwise training of RBMs Top-level RBM sampled x h3 h2 h1 How to train all levels together?
55 Deep Boltzman Machines (Salakhutdinov et al, AISTATS 2009, Lee et al, ICML 2009) Positive phase: variational approximation (mean-field) Negative phase: persistent chain Can (must) initialize from stacked RBMs Improved performance on MNIST from 1.2% to.95% error h3 h2 h1 Can apply AIS with 2 hidden layers observed x
56 Estimating Log-Likelihood RBMs: requires estimating partition function Reconstruction error provides a cheap proxy Log Z tractable analytically for < 25 binary inputs or hidden Lower-bounded (how well?) with Annealed Importance Sampling (AIS) Deep Belief Networks: Extensions of AIS (Salakhutdinov & Murray, ICML 2008, NIPS 2008) Open question: efficient ways to monitor progress
: state-of-the-art on MNIST digits, Caltech-101 objects,")
57 Deep Convolutional Architectures Mostly from Le Cun s group (NYU), also Ng (Stanford): state-of-the-art on MNIST digits, Caltech-101 objects, faces

58 Convolutional DBNs (Lee et al, ICML 2009)
59 Back to Greedy Layer-Wise Pre-Training Stacking Restricted Boltzmann Machines (RBM) Deep Belief Network (DBN) Supervised deep neural network
60 Why are Classifiers Obtained from DBNs Working so Well? General principles? Would these principles work for other single-level algorithms? Why does it work?
61 Stacking Auto-Encoders Greedy layer-wise unsupervised pre-training also works with auto-encoders
62 Auto-encoders and CD RBM log-likelihood gradient can be written as converging expansion: CD-k = 2 k terms, reconstruction error ~ 1 term. (Bengio & Delalleau 2009)

63 Greedy Layerwise Supervised Training Generally worse than unsupervised pre-training but better than ordinary training of a deep neural network (Bengio et al. 2007).
64 Supervised Fine-Tuning is Important Greedy layer-wise unsupervised pre-training phase with RBMs or autoencoders on MNIST Supervised phase with or without unsupervised updates, with or without fine-tuning of hidden layers Can train all RBMs at the same time, same results
65 Sparse Auto-Encoders (Ranzato et al, 2007; Ranzato et al 2008) Sparsity penalty on the intermediate codes Like sparse coding but with efficient run-time encoder Sparsity penalty pushes up the free energy of all configurations (proxy for minimizing the partition function) Impressive results in object classification (convolutional nets): MNIST.5% error = record-breaking Caltech % correct = state-of-the-art (Jarrett et al, ICCV 2009) Similar results obtained with a convolutional DBN (Lee et al, ICML 2009)
66 Denoising Auto-Encoder (Vincent et al, 2008) Hidden code (representation) KL(reconstruction raw input) Corrupted input Raw input reconstruction Corrupt the input (e.g. set 25% of inputs to 0) Reconstruct the uncorrupted input Use uncorrupted encoding as input to next level


67 Denoising Auto-Encoder Learns a vector field towards higher probability regions Minimizes variational lower bound on a generative model Corrupted input Similar to pseudo-likelihood Corrupted input
68 Stacked Denoising Auto-Encoders No partition function, can measure training criterion Encoder & decoder: any parametrization Performs as well or better than stacking RBMs for usupervised pre-training Generative model is semi-parametric Infinite MNIST

69 Denoising Auto-Encoders: Benchmarks

70 Denoising Auto-Encoders: Results
71 Why is Unsupervised Pre-Training Working So Well? Regularization hypothesis: Unsupervised component forces model close to P(x) Representations good for P(x) are good for P(y x) Optimization hypothesis: Unsupervised initialization near better local minimum of P(y x) Can reach lower local minimum otherwise not achievable by random initialization

72 Learning Trajectories in Function Space Each point a model in function space Color = epoch Top: trajectories w/o pre-training Each trajectory converges in different local min. No overlap of regions with and w/o pre-training
73 Unsupervised learning as regularizer Adding extra regularization (reducing # hidden units) hurts more the pre-trained models Pre-trained models have less variance wrt training sample Regularizer = infinite penalty outside of region compatible with unsupervised pre-training
74 Better optimization of online error Both training and online error are smaller with unsupervised pre-training As # samples training err. = online err. = generalization err. Without unsup. pre-training: can t exploit capacity to capture complexity in target function from training data

75 Pre-training lower layers more critical Verifies that what matters is not just the marginal distribution over initial weight values (Histogram init.)
76 The Credit Assignment Problem Even with the correct gradient, lower layers (far from the prediction, close to input) are the most difficult to train Lower layers benefit most from unsupervised pre-training Local unsupervised signal = extract / disentangle factors Temporal constancy Mutual information between multiple modalities Credit assignment / error information not flowing easily? Related to difficulty of credit assignment through time?
77 Level-Local Learning is Important Initializing each layer of an unsupervised deep Boltzmann machine helps a lot Initializing each layer of a supervised neural network as an RBM helps a lot Helps most the layers further away from the target Not just an effect of unsupervised prior Jointly training all the levels of a deep architecture is difficult Initializing using a level-local learning algorithm (RBM, auto-encoders, etc.) is a useful trick
78 Semi-Supervised Embedding Use pairs (or triplets) of examples which are known to represent nearby concepts (or not) Bring closer the intermediate representations of supposedly similar pairs, push away the representations of randomly chosen pairs (Weston, Ratle & Collobert, ICML 2008): improved semi-supervised learning by combining unsupervised embedding criterion with supervised gradient

79 Slow Features Successive images in a video = similar Randomly chosen pair of images = dissimilar Slowly varying features are likely to represent interesting abstractions Slow features 1 st layer

80 Learning Dynamics of Deep Nets Before fine-tuning After fine-tuning
81 Learning Dynamics of Deep Nets As weights become larger, get trapped in basin of attraction ( quadrant does not change) Initial updates have a crucial influence ( critical period ), explain more of the variance 0 Unsupervised pre-training initializes in basin of attraction with good generalization properties
82 Order & Selection of Examples Matters Curriculum learning (Bengio et al, ICML 2009; Krueger & Dayan 2009) Start with easier examples Faster convergence to a better local minimum in deep architectures Also acts like a regularizer with optimization effect? Influencing learning dynamics can make a big difference
83 Continuation Methods Final solution Track local minima Easy to find minimum

84 Curriculum Learning as Continuation Sequence of training distributions 2 1 Easiest Lower level abstractions 3 Most difficult examples Higher level abstractions Initially peaking on easier / simpler ones Gradually give more weight to more difficult ones until reach target distribution
85 Take-Home Messages Break-through in learning complicated functions: deep architectures with distributed representations Multiple levels of latent variables: potentially exponential gain in statistical sharing Main challenge: training deep architectures RBMs allow fast inference, stacked RBMs / auto-encoders have fast approximate inference Unsupervised pre-training of classifiers acts like a strange regularizer with improved optimization of online error At least as important as the model: the inference approximations and the learning dynamics
86 Some Open Problems Why is it difficult to train deep architectures? What is important in the learning dynamics? How to improve joint training of all layers? How to sample better from RBMs and deep generative models? Monitoring unsupervised learning quality in deep nets? Other ways to guide training of intermediate representations? Capturing scene structure and sequential structure?
87 Thank you for your attention! Questions? Comments?
Learning Deep Architectures
 Learning Deep Architectures Yoshua Bengio, U. Montreal Microsoft Cambridge, U.K. July 7th, 2009, Montreal Thanks to: Aaron Courville, Pascal Vincent, Dumitru Erhan, Olivier Delalleau, Olivier Breuleux,
Learning Deep Architectures Yoshua Bengio, U. Montreal Microsoft Cambridge, U.K. July 7th, 2009, Montreal Thanks to: Aaron Courville, Pascal Vincent, Dumitru Erhan, Olivier Delalleau, Olivier Breuleux,
Part 2. Representation Learning Algorithms
 53 Part 2 Representation Learning Algorithms 54 A neural network = running several logistic regressions at the same time If we feed a vector of inputs through a bunch of logis;c regression func;ons, then
53 Part 2 Representation Learning Algorithms 54 A neural network = running several logistic regressions at the same time If we feed a vector of inputs through a bunch of logis;c regression func;ons, then
Deep Belief Networks are compact universal approximators
 1 Deep Belief Networks are compact universal approximators Nicolas Le Roux 1, Yoshua Bengio 2 1 Microsoft Research Cambridge 2 University of Montreal Keywords: Deep Belief Networks, Universal Approximation
1 Deep Belief Networks are compact universal approximators Nicolas Le Roux 1, Yoshua Bengio 2 1 Microsoft Research Cambridge 2 University of Montreal Keywords: Deep Belief Networks, Universal Approximation
Denoising Autoencoders
 Denoising Autoencoders Oliver Worm, Daniel Leinfelder 20.11.2013 Oliver Worm, Daniel Leinfelder Denoising Autoencoders 20.11.2013 1 / 11 Introduction Poor initialisation can lead to local minima 1986 -
Denoising Autoencoders Oliver Worm, Daniel Leinfelder 20.11.2013 Oliver Worm, Daniel Leinfelder Denoising Autoencoders 20.11.2013 1 / 11 Introduction Poor initialisation can lead to local minima 1986 -
A graph contains a set of nodes (vertices) connected by links (edges or arcs)
 connected by links (edges or arcs)") BOLTZMANN MACHINES Generative Models Graphical Models A graph contains a set of nodes (vertices) connected by links (edges or arcs) In a probabilistic graphical model, each node represents a random variable,
BOLTZMANN MACHINES Generative Models Graphical Models A graph contains a set of nodes (vertices) connected by links (edges or arcs) In a probabilistic graphical model, each node represents a random variable,
Greedy Layer-Wise Training of Deep Networks
 Greedy Layer-Wise Training of Deep Networks Yoshua Bengio, Pascal Lamblin, Dan Popovici, Hugo Larochelle NIPS 2007 Presented by Ahmed Hefny Story so far Deep neural nets are more expressive: Can learn
Greedy Layer-Wise Training of Deep Networks Yoshua Bengio, Pascal Lamblin, Dan Popovici, Hugo Larochelle NIPS 2007 Presented by Ahmed Hefny Story so far Deep neural nets are more expressive: Can learn
UNSUPERVISED LEARNING
 UNSUPERVISED LEARNING Topics Layer-wise (unsupervised) pre-training Restricted Boltzmann Machines Auto-encoders LAYER-WISE (UNSUPERVISED) PRE-TRAINING Breakthrough in 2006 Layer-wise (unsupervised) pre-training
UNSUPERVISED LEARNING Topics Layer-wise (unsupervised) pre-training Restricted Boltzmann Machines Auto-encoders LAYER-WISE (UNSUPERVISED) PRE-TRAINING Breakthrough in 2006 Layer-wise (unsupervised) pre-training
Lecture 16 Deep Neural Generative Models
 Lecture 16 Deep Neural Generative Models CMSC 35246: Deep Learning Shubhendu Trivedi & Risi Kondor University of Chicago May 22, 2017 Approach so far: We have considered simple models and then constructed
Lecture 16 Deep Neural Generative Models CMSC 35246: Deep Learning Shubhendu Trivedi & Risi Kondor University of Chicago May 22, 2017 Approach so far: We have considered simple models and then constructed
Deep Generative Models. (Unsupervised Learning)
") Deep Generative Models (Unsupervised Learning) CEng 783 Deep Learning Fall 2017 Emre Akbaş Reminders Next week: project progress demos in class Describe your problem/goal What you have done so far What
Deep Generative Models (Unsupervised Learning) CEng 783 Deep Learning Fall 2017 Emre Akbaş Reminders Next week: project progress demos in class Describe your problem/goal What you have done so far What
TUTORIAL PART 1 Unsupervised Learning
 TUTORIAL PART 1 Unsupervised Learning Marc'Aurelio Ranzato Department of Computer Science Univ. of Toronto ranzato@cs.toronto.edu Co-organizers: Honglak Lee, Yoshua Bengio, Geoff Hinton, Yann LeCun, Andrew
TUTORIAL PART 1 Unsupervised Learning Marc'Aurelio Ranzato Department of Computer Science Univ. of Toronto ranzato@cs.toronto.edu Co-organizers: Honglak Lee, Yoshua Bengio, Geoff Hinton, Yann LeCun, Andrew
Learning Deep Architectures for AI. Part II - Vijay Chakilam
 Learning Deep Architectures for AI - Yoshua Bengio Part II - Vijay Chakilam Limitations of Perceptron x1 W, b 0,1 1,1 y x2 weight plane output =1 output =0 There is no value for W and b such that the model
Learning Deep Architectures for AI - Yoshua Bengio Part II - Vijay Chakilam Limitations of Perceptron x1 W, b 0,1 1,1 y x2 weight plane output =1 output =0 There is no value for W and b such that the model
Empirical Analysis of the Divergence of Gibbs Sampling Based Learning Algorithms for Restricted Boltzmann Machines
 Empirical Analysis of the Divergence of Gibbs Sampling Based Learning Algorithms for Restricted Boltzmann Machines Asja Fischer and Christian Igel Institut für Neuroinformatik Ruhr-Universität Bochum,
Empirical Analysis of the Divergence of Gibbs Sampling Based Learning Algorithms for Restricted Boltzmann Machines Asja Fischer and Christian Igel Institut für Neuroinformatik Ruhr-Universität Bochum,
Large-Scale Feature Learning with Spike-and-Slab Sparse Coding
 Large-Scale Feature Learning with Spike-and-Slab Sparse Coding Ian J. Goodfellow, Aaron Courville, Yoshua Bengio ICML 2012 Presented by Xin Yuan January 17, 2013 1 Outline Contributions Spike-and-Slab
Large-Scale Feature Learning with Spike-and-Slab Sparse Coding Ian J. Goodfellow, Aaron Courville, Yoshua Bengio ICML 2012 Presented by Xin Yuan January 17, 2013 1 Outline Contributions Spike-and-Slab
Deep Learning & Neural Networks Lecture 2
 Deep Learning & Neural Networks Lecture 2 Kevin Duh Graduate School of Information Science Nara Institute of Science and Technology Jan 16, 2014 2/45 Today s Topics 1 General Ideas in Deep Learning Motivation
Deep Learning & Neural Networks Lecture 2 Kevin Duh Graduate School of Information Science Nara Institute of Science and Technology Jan 16, 2014 2/45 Today s Topics 1 General Ideas in Deep Learning Motivation
Feature Design. Feature Design. Feature Design. & Deep Learning
 Artificial Intelligence and its applications Lecture 9 & Deep Learning Professor Daniel Yeung danyeung@ieee.org Dr. Patrick Chan patrickchan@ieee.org South China University of Technology, China Appropriately
Artificial Intelligence and its applications Lecture 9 & Deep Learning Professor Daniel Yeung danyeung@ieee.org Dr. Patrick Chan patrickchan@ieee.org South China University of Technology, China Appropriately
Deep unsupervised learning
 Deep unsupervised learning Advanced data-mining Yongdai Kim Department of Statistics, Seoul National University, South Korea Unsupervised learning In machine learning, there are 3 kinds of learning paradigm.
Deep unsupervised learning Advanced data-mining Yongdai Kim Department of Statistics, Seoul National University, South Korea Unsupervised learning In machine learning, there are 3 kinds of learning paradigm.
Knowledge Extraction from DBNs for Images
 Knowledge Extraction from DBNs for Images Son N. Tran and Artur d Avila Garcez Department of Computer Science City University London Contents 1 Introduction 2 Knowledge Extraction from DBNs 3 Experimental
Knowledge Extraction from DBNs for Images Son N. Tran and Artur d Avila Garcez Department of Computer Science City University London Contents 1 Introduction 2 Knowledge Extraction from DBNs 3 Experimental
Gaussian Cardinality Restricted Boltzmann Machines
 Proceedings of the Twenty-Ninth AAAI Conference on Artificial Intelligence Gaussian Cardinality Restricted Boltzmann Machines Cheng Wan, Xiaoming Jin, Guiguang Ding and Dou Shen School of Software, Tsinghua
Proceedings of the Twenty-Ninth AAAI Conference on Artificial Intelligence Gaussian Cardinality Restricted Boltzmann Machines Cheng Wan, Xiaoming Jin, Guiguang Ding and Dou Shen School of Software, Tsinghua
Deep Learning Srihari. Deep Belief Nets. Sargur N. Srihari
 Deep Belief Nets Sargur N. Srihari srihari@cedar.buffalo.edu Topics 1. Boltzmann machines 2. Restricted Boltzmann machines 3. Deep Belief Networks 4. Deep Boltzmann machines 5. Boltzmann machines for continuous
Deep Belief Nets Sargur N. Srihari srihari@cedar.buffalo.edu Topics 1. Boltzmann machines 2. Restricted Boltzmann machines 3. Deep Belief Networks 4. Deep Boltzmann machines 5. Boltzmann machines for continuous
Reading Group on Deep Learning Session 4 Unsupervised Neural Networks
 Reading Group on Deep Learning Session 4 Unsupervised Neural Networks Jakob Verbeek & Daan Wynen 206-09-22 Jakob Verbeek & Daan Wynen Unsupervised Neural Networks Outline Autoencoders Restricted) Boltzmann
Reading Group on Deep Learning Session 4 Unsupervised Neural Networks Jakob Verbeek & Daan Wynen 206-09-22 Jakob Verbeek & Daan Wynen Unsupervised Neural Networks Outline Autoencoders Restricted) Boltzmann
WHY ARE DEEP NETS REVERSIBLE: A SIMPLE THEORY,
 WHY ARE DEEP NETS REVERSIBLE: A SIMPLE THEORY, WITH IMPLICATIONS FOR TRAINING Sanjeev Arora, Yingyu Liang & Tengyu Ma Department of Computer Science Princeton University Princeton, NJ 08540, USA {arora,yingyul,tengyu}@cs.princeton.edu
WHY ARE DEEP NETS REVERSIBLE: A SIMPLE THEORY, WITH IMPLICATIONS FOR TRAINING Sanjeev Arora, Yingyu Liang & Tengyu Ma Department of Computer Science Princeton University Princeton, NJ 08540, USA {arora,yingyul,tengyu}@cs.princeton.edu
Need for Deep Networks Perceptron. Can only model linear functions. Kernel Machines. Non-linearity provided by kernels
 Need for Deep Networks Perceptron Can only model linear functions Kernel Machines Non-linearity provided by kernels Need to design appropriate kernels (possibly selecting from a set, i.e. kernel learning)
Need for Deep Networks Perceptron Can only model linear functions Kernel Machines Non-linearity provided by kernels Need to design appropriate kernels (possibly selecting from a set, i.e. kernel learning)
Deep learning / Ian Goodfellow, Yoshua Bengio and Aaron Courville. - Cambridge, MA ; London, Spis treści
 Deep learning / Ian Goodfellow, Yoshua Bengio and Aaron Courville. - Cambridge, MA ; London, 2017 Spis treści Website Acknowledgments Notation xiii xv xix 1 Introduction 1 1.1 Who Should Read This Book?
Deep learning / Ian Goodfellow, Yoshua Bengio and Aaron Courville. - Cambridge, MA ; London, 2017 Spis treści Website Acknowledgments Notation xiii xv xix 1 Introduction 1 1.1 Who Should Read This Book?
Neural Networks. William Cohen [pilfered from: Ziv; Geoff Hinton; Yoshua Bengio; Yann LeCun; Hongkak Lee - NIPs 2010 tutorial ]
![Neural Networks. William Cohen [pilfered from: Ziv; Geoff Hinton; Yoshua Bengio; Yann LeCun; Hongkak Lee - NIPs 2010 tutorial ]](/thumbs/88/117565192.jpg "Neural Networks. William Cohen [pilfered from: Ziv; Geoff Hinton; Yoshua Bengio; Yann LeCun; Hongkak Lee - NIPs 2010 tutorial ]") Neural Networks William Cohen 10-601 [pilfered from: Ziv; Geoff Hinton; Yoshua Bengio; Yann LeCun; Hongkak Lee - NIPs 2010 tutorial ] WHAT ARE NEURAL NETWORKS? William s notation Logis;c regression + 1
Neural Networks William Cohen 10-601 [pilfered from: Ziv; Geoff Hinton; Yoshua Bengio; Yann LeCun; Hongkak Lee - NIPs 2010 tutorial ] WHAT ARE NEURAL NETWORKS? William s notation Logis;c regression + 1
Stochastic Gradient Estimate Variance in Contrastive Divergence and Persistent Contrastive Divergence
 ESANN 0 proceedings, European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning. Bruges (Belgium), 7-9 April 0, idoc.com publ., ISBN 97-7707-. Stochastic Gradient
ESANN 0 proceedings, European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning. Bruges (Belgium), 7-9 April 0, idoc.com publ., ISBN 97-7707-. Stochastic Gradient
The Origin of Deep Learning. Lili Mou Jan, 2015
 The Origin of Deep Learning Lili Mou Jan, 2015 Acknowledgment Most of the materials come from G. E. Hinton s online course. Outline Introduction Preliminary Boltzmann Machines and RBMs Deep Belief Nets
The Origin of Deep Learning Lili Mou Jan, 2015 Acknowledgment Most of the materials come from G. E. Hinton s online course. Outline Introduction Preliminary Boltzmann Machines and RBMs Deep Belief Nets
Auto-Encoders & Variants
 Auto-Encoders & Variants 113 Auto-Encoders MLP whose target output = input Reconstruc7on=decoder(encoder(input)), input e.g. x code= latent features h encoder decoder reconstruc7on r(x) With bo?leneck,
Auto-Encoders & Variants 113 Auto-Encoders MLP whose target output = input Reconstruc7on=decoder(encoder(input)), input e.g. x code= latent features h encoder decoder reconstruc7on r(x) With bo?leneck,
How to do backpropagation in a brain
 How to do backpropagation in a brain Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto & Google Inc. Prelude I will start with three slides explaining a popular type of deep
How to do backpropagation in a brain Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto & Google Inc. Prelude I will start with three slides explaining a popular type of deep
Measuring the Usefulness of Hidden Units in Boltzmann Machines with Mutual Information
 Measuring the Usefulness of Hidden Units in Boltzmann Machines with Mutual Information Mathias Berglund, Tapani Raiko, and KyungHyun Cho Department of Information and Computer Science Aalto University
Measuring the Usefulness of Hidden Units in Boltzmann Machines with Mutual Information Mathias Berglund, Tapani Raiko, and KyungHyun Cho Department of Information and Computer Science Aalto University
Learning Deep Architectures for AI. Contents
 Foundations and Trends R in Machine Learning Vol. 2, No. 1 (2009) 1 127 c 2009 Y. Bengio DOI: 10.1561/2200000006 Learning Deep Architectures for AI By Yoshua Bengio Contents 1 Introduction 2 1.1 How do
Foundations and Trends R in Machine Learning Vol. 2, No. 1 (2009) 1 127 c 2009 Y. Bengio DOI: 10.1561/2200000006 Learning Deep Architectures for AI By Yoshua Bengio Contents 1 Introduction 2 1.1 How do
arxiv: v2 [cs.ne] 22 Feb 2013
![arxiv: v2 [cs.ne] 22 Feb 2013](/thumbs/76/74046790.jpg "arxiv: v2 [cs.ne] 22 Feb 2013") Sparse Penalty in Deep Belief Networks: Using the Mixed Norm Constraint arxiv:1301.3533v2 [cs.ne] 22 Feb 2013 Xanadu C. Halkias DYNI, LSIS, Universitè du Sud, Avenue de l Université - BP20132, 83957 LA
Sparse Penalty in Deep Belief Networks: Using the Mixed Norm Constraint arxiv:1301.3533v2 [cs.ne] 22 Feb 2013 Xanadu C. Halkias DYNI, LSIS, Universitè du Sud, Avenue de l Université - BP20132, 83957 LA
Unsupervised Learning of Hierarchical Models. in collaboration with Josh Susskind and Vlad Mnih
 Unsupervised Learning of Hierarchical Models Marc'Aurelio Ranzato Geoff Hinton in collaboration with Josh Susskind and Vlad Mnih Advanced Machine Learning, 9 March 2011 Example: facial expression recognition
Unsupervised Learning of Hierarchical Models Marc'Aurelio Ranzato Geoff Hinton in collaboration with Josh Susskind and Vlad Mnih Advanced Machine Learning, 9 March 2011 Example: facial expression recognition
An Introduction to Deep Learning
 An Introduction to Deep Learning Ludovic Arnold 1,2, Sébastien Rebecchi 1, Sylvain Chevallier 1, Hélène Paugam-Moisy 1,3 1- Tao, INRIA-Saclay, LRI, UMR8623, Université Paris-Sud 11 F-91405 Orsay, France
An Introduction to Deep Learning Ludovic Arnold 1,2, Sébastien Rebecchi 1, Sylvain Chevallier 1, Hélène Paugam-Moisy 1,3 1- Tao, INRIA-Saclay, LRI, UMR8623, Université Paris-Sud 11 F-91405 Orsay, France
Knowledge Extraction from Deep Belief Networks for Images
 Knowledge Extraction from Deep Belief Networks for Images Son N. Tran City University London Northampton Square, ECV 0HB, UK Son.Tran.@city.ac.uk Artur d Avila Garcez City University London Northampton
Knowledge Extraction from Deep Belief Networks for Images Son N. Tran City University London Northampton Square, ECV 0HB, UK Son.Tran.@city.ac.uk Artur d Avila Garcez City University London Northampton
Autoencoders and Score Matching. Based Models. Kevin Swersky Marc Aurelio Ranzato David Buchman Benjamin M. Marlin Nando de Freitas
 On for Energy Based Models Kevin Swersky Marc Aurelio Ranzato David Buchman Benjamin M. Marlin Nando de Freitas Toronto Machine Learning Group Meeting, 2011 Motivation Models Learning Goal: Unsupervised
On for Energy Based Models Kevin Swersky Marc Aurelio Ranzato David Buchman Benjamin M. Marlin Nando de Freitas Toronto Machine Learning Group Meeting, 2011 Motivation Models Learning Goal: Unsupervised
Introduction to Restricted Boltzmann Machines
 Introduction to Restricted Boltzmann Machines Ilija Bogunovic and Edo Collins EPFL {ilija.bogunovic,edo.collins}@epfl.ch October 13, 2014 Introduction Ingredients: 1. Probabilistic graphical models (undirected,
Introduction to Restricted Boltzmann Machines Ilija Bogunovic and Edo Collins EPFL {ilija.bogunovic,edo.collins}@epfl.ch October 13, 2014 Introduction Ingredients: 1. Probabilistic graphical models (undirected,
arxiv: v1 [stat.ml] 2 Sep 2014
![arxiv: v1 [stat.ml] 2 Sep 2014](/thumbs/74/71268749.jpg "arxiv: v1 [stat.ml] 2 Sep 2014") On the Equivalence Between Deep NADE and Generative Stochastic Networks Li Yao, Sherjil Ozair, Kyunghyun Cho, and Yoshua Bengio Département d Informatique et de Recherche Opérationelle Université de Montréal
On the Equivalence Between Deep NADE and Generative Stochastic Networks Li Yao, Sherjil Ozair, Kyunghyun Cho, and Yoshua Bengio Département d Informatique et de Recherche Opérationelle Université de Montréal
Deep Learning: Self-Taught Learning and Deep vs. Shallow Architectures. Lecture 04
 Deep Learning: Self-Taught Learning and Deep vs. Shallow Architectures Lecture 04 Razvan C. Bunescu School of Electrical Engineering and Computer Science bunescu@ohio.edu Self-Taught Learning 1. Learn
Deep Learning: Self-Taught Learning and Deep vs. Shallow Architectures Lecture 04 Razvan C. Bunescu School of Electrical Engineering and Computer Science bunescu@ohio.edu Self-Taught Learning 1. Learn
Need for Deep Networks Perceptron. Can only model linear functions. Kernel Machines. Non-linearity provided by kernels
 Need for Deep Networks Perceptron Can only model linear functions Kernel Machines Non-linearity provided by kernels Need to design appropriate kernels (possibly selecting from a set, i.e. kernel learning)
Need for Deep Networks Perceptron Can only model linear functions Kernel Machines Non-linearity provided by kernels Need to design appropriate kernels (possibly selecting from a set, i.e. kernel learning)
arxiv: v3 [cs.lg] 18 Mar 2013
![arxiv: v3 [cs.lg] 18 Mar 2013](/thumbs/72/67390553.jpg "arxiv: v3 [cs.lg] 18 Mar 2013") Hierarchical Data Representation Model - Multi-layer NMF arxiv:1301.6316v3 [cs.lg] 18 Mar 2013 Hyun Ah Song Department of Electrical Engineering KAIST Daejeon, 305-701 hyunahsong@kaist.ac.kr Abstract Soo-Young
Hierarchical Data Representation Model - Multi-layer NMF arxiv:1301.6316v3 [cs.lg] 18 Mar 2013 Hyun Ah Song Department of Electrical Engineering KAIST Daejeon, 305-701 hyunahsong@kaist.ac.kr Abstract Soo-Young
Tempered Markov Chain Monte Carlo for training of Restricted Boltzmann Machines
 Tempered Markov Chain Monte Carlo for training of Restricted Boltzmann Machines Desjardins, G., Courville, A., Bengio, Y., Vincent, P. and Delalleau, O. Technical Report 1345, Dept. IRO, Université de
Tempered Markov Chain Monte Carlo for training of Restricted Boltzmann Machines Desjardins, G., Courville, A., Bengio, Y., Vincent, P. and Delalleau, O. Technical Report 1345, Dept. IRO, Université de
Representational Power of Restricted Boltzmann Machines and Deep Belief Networks. Nicolas Le Roux and Yoshua Bengio Presented by Colin Graber
 Representational Power of Restricted Boltzmann Machines and Deep Belief Networks Nicolas Le Roux and Yoshua Bengio Presented by Colin Graber Introduction Representational abilities of functions with some
Representational Power of Restricted Boltzmann Machines and Deep Belief Networks Nicolas Le Roux and Yoshua Bengio Presented by Colin Graber Introduction Representational abilities of functions with some
Learning Energy-Based Models of High-Dimensional Data
 Learning Energy-Based Models of High-Dimensional Data Geoffrey Hinton Max Welling Yee-Whye Teh Simon Osindero www.cs.toronto.edu/~hinton/energybasedmodelsweb.htm Discovering causal structure as a goal
Learning Energy-Based Models of High-Dimensional Data Geoffrey Hinton Max Welling Yee-Whye Teh Simon Osindero www.cs.toronto.edu/~hinton/energybasedmodelsweb.htm Discovering causal structure as a goal
Au-delà de la Machine de Boltzmann Restreinte. Hugo Larochelle University of Toronto
 Au-delà de la Machine de Boltzmann Restreinte Hugo Larochelle University of Toronto Introduction Restricted Boltzmann Machines (RBMs) are useful feature extractors They are mostly used to initialize deep
Au-delà de la Machine de Boltzmann Restreinte Hugo Larochelle University of Toronto Introduction Restricted Boltzmann Machines (RBMs) are useful feature extractors They are mostly used to initialize deep
Unsupervised Learning
 CS 3750 Advanced Machine Learning hkc6@pitt.edu Unsupervised Learning Data: Just data, no labels Goal: Learn some underlying hidden structure of the data P(, ) P( ) Principle Component Analysis (Dimensionality
CS 3750 Advanced Machine Learning hkc6@pitt.edu Unsupervised Learning Data: Just data, no labels Goal: Learn some underlying hidden structure of the data P(, ) P( ) Principle Component Analysis (Dimensionality
Enhanced Gradient and Adaptive Learning Rate for Training Restricted Boltzmann Machines
 Enhanced Gradient and Adaptive Learning Rate for Training Restricted Boltzmann Machines KyungHyun Cho KYUNGHYUN.CHO@AALTO.FI Tapani Raiko TAPANI.RAIKO@AALTO.FI Alexander Ilin ALEXANDER.ILIN@AALTO.FI Department
Enhanced Gradient and Adaptive Learning Rate for Training Restricted Boltzmann Machines KyungHyun Cho KYUNGHYUN.CHO@AALTO.FI Tapani Raiko TAPANI.RAIKO@AALTO.FI Alexander Ilin ALEXANDER.ILIN@AALTO.FI Department
Deep Generative Stochastic Networks Trainable by Backprop
 Yoshua Bengio FIND.US@ON.THE.WEB Éric Thibodeau-Laufer Guillaume Alain Département d informatique et recherche opérationnelle, Université de Montréal, & Canadian Inst. for Advanced Research Jason Yosinski
Yoshua Bengio FIND.US@ON.THE.WEB Éric Thibodeau-Laufer Guillaume Alain Département d informatique et recherche opérationnelle, Université de Montréal, & Canadian Inst. for Advanced Research Jason Yosinski
The connection of dropout and Bayesian statistics
 The connection of dropout and Bayesian statistics Interpretation of dropout as approximate Bayesian modelling of NN http://mlg.eng.cam.ac.uk/yarin/thesis/thesis.pdf Dropout Geoffrey Hinton Google, University
The connection of dropout and Bayesian statistics Interpretation of dropout as approximate Bayesian modelling of NN http://mlg.eng.cam.ac.uk/yarin/thesis/thesis.pdf Dropout Geoffrey Hinton Google, University
Cheng Soon Ong & Christian Walder. Canberra February June 2018
 Cheng Soon Ong & Christian Walder Research Group and College of Engineering and Computer Science Canberra February June 2018 Outlines Overview Introduction Linear Algebra Probability Linear Regression
Cheng Soon Ong & Christian Walder Research Group and College of Engineering and Computer Science Canberra February June 2018 Outlines Overview Introduction Linear Algebra Probability Linear Regression
arxiv: v4 [cs.lg] 16 Apr 2015
![arxiv: v4 [cs.lg] 16 Apr 2015](/thumbs/87/96782657.jpg "arxiv: v4 [cs.lg] 16 Apr 2015") REWEIGHTED WAKE-SLEEP Jörg Bornschein and Yoshua Bengio Department of Computer Science and Operations Research University of Montreal Montreal, Quebec, Canada ABSTRACT arxiv:1406.2751v4 [cs.lg] 16 Apr
REWEIGHTED WAKE-SLEEP Jörg Bornschein and Yoshua Bengio Department of Computer Science and Operations Research University of Montreal Montreal, Quebec, Canada ABSTRACT arxiv:1406.2751v4 [cs.lg] 16 Apr
Learning Deep Boltzmann Machines using Adaptive MCMC
 Ruslan Salakhutdinov Brain and Cognitive Sciences and CSAIL, MIT 77 Massachusetts Avenue, Cambridge, MA 02139 rsalakhu@mit.edu Abstract When modeling high-dimensional richly structured data, it is often
Ruslan Salakhutdinov Brain and Cognitive Sciences and CSAIL, MIT 77 Massachusetts Avenue, Cambridge, MA 02139 rsalakhu@mit.edu Abstract When modeling high-dimensional richly structured data, it is often
CONVOLUTIONAL DEEP BELIEF NETWORKS
 CONVOLUTIONAL DEEP BELIEF NETWORKS Talk by Emanuele Coviello Convolutional Deep Belief Networks for Scalable Unsupervised Learning of Hierarchical Representations Honglak Lee Roger Grosse Rajesh Ranganath
CONVOLUTIONAL DEEP BELIEF NETWORKS Talk by Emanuele Coviello Convolutional Deep Belief Networks for Scalable Unsupervised Learning of Hierarchical Representations Honglak Lee Roger Grosse Rajesh Ranganath
Introduction to Convolutional Neural Networks (CNNs)
") Introduction to Convolutional Neural Networks (CNNs) nojunk@snu.ac.kr http://mipal.snu.ac.kr Department of Transdisciplinary Studies Seoul National University, Korea Jan. 2016 Many slides are from Fei-Fei
Introduction to Convolutional Neural Networks (CNNs) nojunk@snu.ac.kr http://mipal.snu.ac.kr Department of Transdisciplinary Studies Seoul National University, Korea Jan. 2016 Many slides are from Fei-Fei
Deep Learning Autoencoder Models
 Deep Learning Autoencoder Models Davide Bacciu Dipartimento di Informatica Università di Pisa Intelligent Systems for Pattern Recognition (ISPR) Generative Models Wrap-up Deep Learning Module Lecture Generative
Deep Learning Autoencoder Models Davide Bacciu Dipartimento di Informatica Università di Pisa Intelligent Systems for Pattern Recognition (ISPR) Generative Models Wrap-up Deep Learning Module Lecture Generative
Sum-Product Networks: A New Deep Architecture
 Sum-Product Networks: A New Deep Architecture Pedro Domingos Dept. Computer Science & Eng. University of Washington Joint work with Hoifung Poon 1 Graphical Models: Challenges Bayesian Network Markov Network
Sum-Product Networks: A New Deep Architecture Pedro Domingos Dept. Computer Science & Eng. University of Washington Joint work with Hoifung Poon 1 Graphical Models: Challenges Bayesian Network Markov Network
An Efficient Learning Procedure for Deep Boltzmann Machines
 ARTICLE Communicated by Yoshua Bengio An Efficient Learning Procedure for Deep Boltzmann Machines Ruslan Salakhutdinov rsalakhu@utstat.toronto.edu Department of Statistics, University of Toronto, Toronto,
ARTICLE Communicated by Yoshua Bengio An Efficient Learning Procedure for Deep Boltzmann Machines Ruslan Salakhutdinov rsalakhu@utstat.toronto.edu Department of Statistics, University of Toronto, Toronto,
COMP9444 Neural Networks and Deep Learning 11. Boltzmann Machines. COMP9444 c Alan Blair, 2017
 COMP9444 Neural Networks and Deep Learning 11. Boltzmann Machines COMP9444 17s2 Boltzmann Machines 1 Outline Content Addressable Memory Hopfield Network Generative Models Boltzmann Machine Restricted Boltzmann
COMP9444 Neural Networks and Deep Learning 11. Boltzmann Machines COMP9444 17s2 Boltzmann Machines 1 Outline Content Addressable Memory Hopfield Network Generative Models Boltzmann Machine Restricted Boltzmann
Bias-Variance Trade-Off in Hierarchical Probabilistic Models Using Higher-Order Feature Interactions
 - Trade-Off in Hierarchical Probabilistic Models Using Higher-Order Feature Interactions Simon Luo The University of Sydney Data61, CSIRO simon.luo@data61.csiro.au Mahito Sugiyama National Institute of
- Trade-Off in Hierarchical Probabilistic Models Using Higher-Order Feature Interactions Simon Luo The University of Sydney Data61, CSIRO simon.luo@data61.csiro.au Mahito Sugiyama National Institute of
Nonlinear system modeling with deep neural networks and autoencoders algorithm
 Nonlinear system modeling with deep neural networks and autoencoders algorithm Erick De la Rosa, Wen Yu Departamento de Control Automatico CINVESTAV-IPN Mexico City, Mexico yuw@ctrl.cinvestav.mx Xiaoou
Nonlinear system modeling with deep neural networks and autoencoders algorithm Erick De la Rosa, Wen Yu Departamento de Control Automatico CINVESTAV-IPN Mexico City, Mexico yuw@ctrl.cinvestav.mx Xiaoou
Density estimation. Computing, and avoiding, partition functions. Iain Murray
 Density estimation Computing, and avoiding, partition functions Roadmap: Motivation: density estimation Understanding annealing/tempering NADE Iain Murray School of Informatics, University of Edinburgh
Density estimation Computing, and avoiding, partition functions Roadmap: Motivation: density estimation Understanding annealing/tempering NADE Iain Murray School of Informatics, University of Edinburgh
Parallel Tempering is Efficient for Learning Restricted Boltzmann Machines
 Parallel Tempering is Efficient for Learning Restricted Boltzmann Machines KyungHyun Cho, Tapani Raiko, Alexander Ilin Abstract A new interest towards restricted Boltzmann machines (RBMs) has risen due
Parallel Tempering is Efficient for Learning Restricted Boltzmann Machines KyungHyun Cho, Tapani Raiko, Alexander Ilin Abstract A new interest towards restricted Boltzmann machines (RBMs) has risen due
An efficient way to learn deep generative models
 An efficient way to learn deep generative models Geoffrey Hinton Canadian Institute for Advanced Research & Department of Computer Science University of Toronto Joint work with: Ruslan Salakhutdinov, Yee-Whye
An efficient way to learn deep generative models Geoffrey Hinton Canadian Institute for Advanced Research & Department of Computer Science University of Toronto Joint work with: Ruslan Salakhutdinov, Yee-Whye
How to do backpropagation in a brain. Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto
 1 How to do backpropagation in a brain Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto What is wrong with back-propagation? It requires labeled training data. (fixed) Almost
1 How to do backpropagation in a brain Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto What is wrong with back-propagation? It requires labeled training data. (fixed) Almost
Jakub Hajic Artificial Intelligence Seminar I
 Jakub Hajic Artificial Intelligence Seminar I. 11. 11. 2014 Outline Key concepts Deep Belief Networks Convolutional Neural Networks A couple of questions Convolution Perceptron Feedforward Neural Network
Jakub Hajic Artificial Intelligence Seminar I. 11. 11. 2014 Outline Key concepts Deep Belief Networks Convolutional Neural Networks A couple of questions Convolution Perceptron Feedforward Neural Network
Inductive Principles for Restricted Boltzmann Machine Learning
 Inductive Principles for Restricted Boltzmann Machine Learning Benjamin Marlin Department of Computer Science University of British Columbia Joint work with Kevin Swersky, Bo Chen and Nando de Freitas
Inductive Principles for Restricted Boltzmann Machine Learning Benjamin Marlin Department of Computer Science University of British Columbia Joint work with Kevin Swersky, Bo Chen and Nando de Freitas
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
STA 414/2104: Lecture 8
 STA 414/2104: Lecture 8 6-7 March 2017: Continuous Latent Variable Models, Neural networks With thanks to Russ Salakhutdinov, Jimmy Ba and others Outline Continuous latent variable models Background PCA
STA 414/2104: Lecture 8 6-7 March 2017: Continuous Latent Variable Models, Neural networks With thanks to Russ Salakhutdinov, Jimmy Ba and others Outline Continuous latent variable models Background PCA
Restricted Boltzmann Machines
 Restricted Boltzmann Machines Boltzmann Machine(BM) A Boltzmann machine extends a stochastic Hopfield network to include hidden units. It has binary (0 or 1) visible vector unit x and hidden (latent) vector
Restricted Boltzmann Machines Boltzmann Machine(BM) A Boltzmann machine extends a stochastic Hopfield network to include hidden units. It has binary (0 or 1) visible vector unit x and hidden (latent) vector
Efficient Learning of Sparse, Distributed, Convolutional Feature Representations for Object Recognition
 Efficient Learning of Sparse, Distributed, Convolutional Feature Representations for Object Recognition Kihyuk Sohn Dae Yon Jung Honglak Lee Alfred O. Hero III Dept. of Electrical Engineering and Computer
Efficient Learning of Sparse, Distributed, Convolutional Feature Representations for Object Recognition Kihyuk Sohn Dae Yon Jung Honglak Lee Alfred O. Hero III Dept. of Electrical Engineering and Computer
Deep Learning of Invariant Spatiotemporal Features from Video. Bo Chen, Jo-Anne Ting, Ben Marlin, Nando de Freitas University of British Columbia
 Deep Learning of Invariant Spatiotemporal Features from Video Bo Chen, Jo-Anne Ting, Ben Marlin, Nando de Freitas University of British Columbia Introduction Focus: Unsupervised feature extraction from
Deep Learning of Invariant Spatiotemporal Features from Video Bo Chen, Jo-Anne Ting, Ben Marlin, Nando de Freitas University of British Columbia Introduction Focus: Unsupervised feature extraction from
Quickly Generating Representative Samples from an RBM-Derived Process
 LETTER Communicated by Max Welling Quickly Generating Representative Samples from an RBM-Derived Process Olivier Breuleux breuleux@gmail.com Yoshua Bengio yoshua.bengio@umontreal.ca Pascal Vincent vincentp@iro.umontreal.ca
LETTER Communicated by Max Welling Quickly Generating Representative Samples from an RBM-Derived Process Olivier Breuleux breuleux@gmail.com Yoshua Bengio yoshua.bengio@umontreal.ca Pascal Vincent vincentp@iro.umontreal.ca
Modeling Natural Images with Higher-Order Boltzmann Machines
 Modeling Natural Images with Higher-Order Boltzmann Machines Marc'Aurelio Ranzato Department of Computer Science Univ. of Toronto ranzato@cs.toronto.edu joint work with Geoffrey Hinton and Vlad Mnih CIFAR
Modeling Natural Images with Higher-Order Boltzmann Machines Marc'Aurelio Ranzato Department of Computer Science Univ. of Toronto ranzato@cs.toronto.edu joint work with Geoffrey Hinton and Vlad Mnih CIFAR
Cardinality Restricted Boltzmann Machines
 Cardinality Restricted Boltzmann Machines Kevin Swersky Daniel Tarlow Ilya Sutskever Dept. of Computer Science University of Toronto [kswersky,dtarlow,ilya]@cs.toronto.edu Ruslan Salakhutdinov, Richard
Cardinality Restricted Boltzmann Machines Kevin Swersky Daniel Tarlow Ilya Sutskever Dept. of Computer Science University of Toronto [kswersky,dtarlow,ilya]@cs.toronto.edu Ruslan Salakhutdinov, Richard
Deep Learning. What Is Deep Learning? The Rise of Deep Learning. Long History (in Hind Sight)
") CSCE 636 Neural Networks Instructor: Yoonsuck Choe Deep Learning What Is Deep Learning? Learning higher level abstractions/representations from data. Motivation: how the brain represents sensory information
CSCE 636 Neural Networks Instructor: Yoonsuck Choe Deep Learning What Is Deep Learning? Learning higher level abstractions/representations from data. Motivation: how the brain represents sensory information
Unsupervised Feature Learning and Deep Learning: A Review and New Perspectives
 1 Unsupervised Feature Learning and Deep Learning: A Review and New Perspectives Yoshua Bengio, Aaron Courville, and Pascal Vincent Department of computer science and operations research, U. Montreal arxiv:1206.5538v1
1 Unsupervised Feature Learning and Deep Learning: A Review and New Perspectives Yoshua Bengio, Aaron Courville, and Pascal Vincent Department of computer science and operations research, U. Montreal arxiv:1206.5538v1
From perceptrons to word embeddings. Simon Šuster University of Groningen
 From perceptrons to word embeddings Simon Šuster University of Groningen Outline A basic computational unit Weighting some input to produce an output: classification Perceptron Classify tweets Written
From perceptrons to word embeddings Simon Šuster University of Groningen Outline A basic computational unit Weighting some input to produce an output: classification Perceptron Classify tweets Written
Machine Learning. Neural Networks. (slides from Domingos, Pardo, others)
") Machine Learning Neural Networks (slides from Domingos, Pardo, others) Human Brain Neurons Input-Output Transformation Input Spikes Output Spike Spike (= a brief pulse) (Excitatory Post-Synaptic Potential)
Machine Learning Neural Networks (slides from Domingos, Pardo, others) Human Brain Neurons Input-Output Transformation Input Spikes Output Spike Spike (= a brief pulse) (Excitatory Post-Synaptic Potential)
Deep Learning Architecture for Univariate Time Series Forecasting
 CS229,Technical Report, 2014 Deep Learning Architecture for Univariate Time Series Forecasting Dmitry Vengertsev 1 Abstract This paper studies the problem of applying machine learning with deep architecture
CS229,Technical Report, 2014 Deep Learning Architecture for Univariate Time Series Forecasting Dmitry Vengertsev 1 Abstract This paper studies the problem of applying machine learning with deep architecture
Machine Learning. Neural Networks. (slides from Domingos, Pardo, others)
") Machine Learning Neural Networks (slides from Domingos, Pardo, others) For this week, Reading Chapter 4: Neural Networks (Mitchell, 1997) See Canvas For subsequent weeks: Scaling Learning Algorithms toward
Machine Learning Neural Networks (slides from Domingos, Pardo, others) For this week, Reading Chapter 4: Neural Networks (Mitchell, 1997) See Canvas For subsequent weeks: Scaling Learning Algorithms toward
An Empirical Investigation of Minimum Probability Flow Learning Under Different Connectivity Patterns
 An Empirical Investigation of Minimum Probability Flow Learning Under Different Connectivity Patterns Daniel Jiwoong Im, Ethan Buchman, and Graham W. Taylor School of Engineering University of Guelph Guelph,
An Empirical Investigation of Minimum Probability Flow Learning Under Different Connectivity Patterns Daniel Jiwoong Im, Ethan Buchman, and Graham W. Taylor School of Engineering University of Guelph Guelph,
arxiv: v1 [cs.lg] 30 Jun 2012
![arxiv: v1 [cs.lg] 30 Jun 2012](/thumbs/84/89656881.jpg "arxiv: v1 [cs.lg] 30 Jun 2012") Implicit Density Estimation by Local Moment Matching to Sample from Auto-Encoders arxiv:1207.0057v1 [cs.lg] 30 Jun 2012 Yoshua Bengio, Guillaume Alain, and Salah Rifai Department of Computer Science and
Implicit Density Estimation by Local Moment Matching to Sample from Auto-Encoders arxiv:1207.0057v1 [cs.lg] 30 Jun 2012 Yoshua Bengio, Guillaume Alain, and Salah Rifai Department of Computer Science and
CSC321 Lecture 20: Autoencoders
 CSC321 Lecture 20: Autoencoders Roger Grosse Roger Grosse CSC321 Lecture 20: Autoencoders 1 / 16 Overview Latent variable models so far: mixture models Boltzmann machines Both of these involve discrete
CSC321 Lecture 20: Autoencoders Roger Grosse Roger Grosse CSC321 Lecture 20: Autoencoders 1 / 16 Overview Latent variable models so far: mixture models Boltzmann machines Both of these involve discrete
Probabilistic Graphical Models
 10-708 Probabilistic Graphical Models Homework 3 (v1.1.0) Due Apr 14, 7:00 PM Rules: 1. Homework is due on the due date at 7:00 PM. The homework should be submitted via Gradescope. Solution to each problem
10-708 Probabilistic Graphical Models Homework 3 (v1.1.0) Due Apr 14, 7:00 PM Rules: 1. Homework is due on the due date at 7:00 PM. The homework should be submitted via Gradescope. Solution to each problem
Energy Based Models. Stefano Ermon, Aditya Grover. Stanford University. Lecture 13
 Energy Based Models Stefano Ermon, Aditya Grover Stanford University Lecture 13 Stefano Ermon, Aditya Grover (AI Lab) Deep Generative Models Lecture 13 1 / 21 Summary Story so far Representation: Latent
Energy Based Models Stefano Ermon, Aditya Grover Stanford University Lecture 13 Stefano Ermon, Aditya Grover (AI Lab) Deep Generative Models Lecture 13 1 / 21 Summary Story so far Representation: Latent
Speaker Representation and Verification Part II. by Vasileios Vasilakakis
 Speaker Representation and Verification Part II by Vasileios Vasilakakis Outline -Approaches of Neural Networks in Speaker/Speech Recognition -Feed-Forward Neural Networks -Training with Back-propagation
Speaker Representation and Verification Part II by Vasileios Vasilakakis Outline -Approaches of Neural Networks in Speaker/Speech Recognition -Feed-Forward Neural Networks -Training with Back-propagation
Deep Learning of Invariant Spatio-Temporal Features from Video
 Deep Learning of Invariant Spatio-Temporal Features from Video Bo Chen California Institute of Technology Pasadena, CA, USA bchen3@caltech.edu Benjamin M. Marlin University of British Columbia Vancouver,
Deep Learning of Invariant Spatio-Temporal Features from Video Bo Chen California Institute of Technology Pasadena, CA, USA bchen3@caltech.edu Benjamin M. Marlin University of British Columbia Vancouver,
A Spike and Slab Restricted Boltzmann Machine
 Aaron Courville James Bergstra Yoshua Bengio DIRO, Université de Montréal, Montréal, Québec, Canada {courvila,bergstrj,bengioy}@iro.umontreal.ca Abstract We introduce the spike and slab Restricted Boltzmann
Aaron Courville James Bergstra Yoshua Bengio DIRO, Université de Montréal, Montréal, Québec, Canada {courvila,bergstrj,bengioy}@iro.umontreal.ca Abstract We introduce the spike and slab Restricted Boltzmann
Improved Local Coordinate Coding using Local Tangents
 Improved Local Coordinate Coding using Local Tangents Kai Yu NEC Laboratories America, 10081 N. Wolfe Road, Cupertino, CA 95129 Tong Zhang Rutgers University, 110 Frelinghuysen Road, Piscataway, NJ 08854
Improved Local Coordinate Coding using Local Tangents Kai Yu NEC Laboratories America, 10081 N. Wolfe Road, Cupertino, CA 95129 Tong Zhang Rutgers University, 110 Frelinghuysen Road, Piscataway, NJ 08854
Deep Boltzmann Machines
 Deep Boltzmann Machines Ruslan Salakutdinov and Geoffrey E. Hinton Amish Goel University of Illinois Urbana Champaign agoel10@illinois.edu December 2, 2016 Ruslan Salakutdinov and Geoffrey E. Hinton Amish
Deep Boltzmann Machines Ruslan Salakutdinov and Geoffrey E. Hinton Amish Goel University of Illinois Urbana Champaign agoel10@illinois.edu December 2, 2016 Ruslan Salakutdinov and Geoffrey E. Hinton Amish
Deep Learning. What Is Deep Learning? The Rise of Deep Learning. Long History (in Hind Sight)
") CSCE 636 Neural Networks Instructor: Yoonsuck Choe Deep Learning What Is Deep Learning? Learning higher level abstractions/representations from data. Motivation: how the brain represents sensory information
CSCE 636 Neural Networks Instructor: Yoonsuck Choe Deep Learning What Is Deep Learning? Learning higher level abstractions/representations from data. Motivation: how the brain represents sensory information
Asaf Bar Zvi Adi Hayat. Semantic Segmentation
 Asaf Bar Zvi Adi Hayat Semantic Segmentation Today s Topics Fully Convolutional Networks (FCN) (CVPR 2015) Conditional Random Fields as Recurrent Neural Networks (ICCV 2015) Gaussian Conditional random
Asaf Bar Zvi Adi Hayat Semantic Segmentation Today s Topics Fully Convolutional Networks (FCN) (CVPR 2015) Conditional Random Fields as Recurrent Neural Networks (ICCV 2015) Gaussian Conditional random
Deep Learning Basics Lecture 8: Autoencoder & DBM. Princeton University COS 495 Instructor: Yingyu Liang
 Deep Learning Basics Lecture 8: Autoencoder & DBM Princeton University COS 495 Instructor: Yingyu Liang Autoencoder Autoencoder Neural networks trained to attempt to copy its input to its output Contain
Deep Learning Basics Lecture 8: Autoencoder & DBM Princeton University COS 495 Instructor: Yingyu Liang Autoencoder Autoencoder Neural networks trained to attempt to copy its input to its output Contain
The Recurrent Temporal Restricted Boltzmann Machine
 The Recurrent Temporal Restricted Boltzmann Machine Ilya Sutskever, Geoffrey Hinton, and Graham Taylor University of Toronto {ilya, hinton, gwtaylor}@cs.utoronto.ca Abstract The Temporal Restricted Boltzmann
The Recurrent Temporal Restricted Boltzmann Machine Ilya Sutskever, Geoffrey Hinton, and Graham Taylor University of Toronto {ilya, hinton, gwtaylor}@cs.utoronto.ca Abstract The Temporal Restricted Boltzmann
Implementation of a Restricted Boltzmann Machine in a Spiking Neural Network
 Implementation of a Restricted Boltzmann Machine in a Spiking Neural Network Srinjoy Das Department of Electrical and Computer Engineering University of California, San Diego srinjoyd@gmail.com Bruno Umbria
Implementation of a Restricted Boltzmann Machine in a Spiking Neural Network Srinjoy Das Department of Electrical and Computer Engineering University of California, San Diego srinjoyd@gmail.com Bruno Umbria
An Efficient Learning Procedure for Deep Boltzmann Machines Ruslan Salakhutdinov and Geoffrey Hinton
 Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2010-037 August 4, 2010 An Efficient Learning Procedure for Deep Boltzmann Machines Ruslan Salakhutdinov and Geoffrey
Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2010-037 August 4, 2010 An Efficient Learning Procedure for Deep Boltzmann Machines Ruslan Salakhutdinov and Geoffrey
Using Deep Belief Nets to Learn Covariance Kernels for Gaussian Processes
 Using Deep Belief Nets to Learn Covariance Kernels for Gaussian Processes Ruslan Salakhutdinov and Geoffrey Hinton Department of Computer Science, University of Toronto 6 King s College Rd, M5S 3G4, Canada
Using Deep Belief Nets to Learn Covariance Kernels for Gaussian Processes Ruslan Salakhutdinov and Geoffrey Hinton Department of Computer Science, University of Toronto 6 King s College Rd, M5S 3G4, Canada
CPSC 540: Machine Learning
 CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
Administration. Registration Hw3 is out. Lecture Captioning (Extra-Credit) Scribing lectures. Questions. Due on Thursday 10/6
 Scribing lectures. Questions. Due on Thursday 10/6") Administration Registration Hw3 is out Due on Thursday 10/6 Questions Lecture Captioning (Extra-Credit) Look at Piazza for details Scribing lectures With pay; come talk to me/send email. 1 Projects Projects
Administration Registration Hw3 is out Due on Thursday 10/6 Questions Lecture Captioning (Extra-Credit) Look at Piazza for details Scribing lectures With pay; come talk to me/send email. 1 Projects Projects
Restricted Boltzmann Machines
 Restricted Boltzmann Machines http://deeplearning4.org/rbm-mnist-tutorial.html Slides from Hugo Larochelle, Geoffrey Hinton, and Yoshua Bengio CSC321: Intro to Machine Learning and Neural Networks, Winter
Restricted Boltzmann Machines http://deeplearning4.org/rbm-mnist-tutorial.html Slides from Hugo Larochelle, Geoffrey Hinton, and Yoshua Bengio CSC321: Intro to Machine Learning and Neural Networks, Winter
Apprentissage, réseaux de neurones et modèles graphiques (RCP209) Neural Networks and Deep Learning
 Neural Networks and Deep Learning") Apprentissage, réseaux de neurones et modèles graphiques (RCP209) Neural Networks and Deep Learning Nicolas Thome Prenom.Nom@cnam.fr http://cedric.cnam.fr/vertigo/cours/ml2/ Département Informatique Conservatoire
Apprentissage, réseaux de neurones et modèles graphiques (RCP209) Neural Networks and Deep Learning Nicolas Thome Prenom.Nom@cnam.fr http://cedric.cnam.fr/vertigo/cours/ml2/ Département Informatique Conservatoire