|
|
|
- Lynette Austin
- 5 years ago
- Views:
Transcription
1 Preface On August 15, 2012, I received the following message from Ryan Budney (ryan.budney@gmail.com). Hi Dick, Here s an MO post that s right up your alley. :) When I went to the MathOverflow website and looked at the relevant question, here is what I saw: In Cushman and Bates, Global Aspects of Classical Integrable Systems, 1997, I have read: In a widely circulated but unpublished letter in 1965, Palais explained the symplectic formulation of Hamiltonian mechanics. I would like to know if, in the meanwhile, this letter was made available. Giuseppe Tortorella That sixty-year old letter had in fact not been made publicly available, but I was able to locate the pages that made it up and I scanned them and made the scan available online (with an added first-page from Abraham and Marsden s Foundations of Mechanics, giving the first reference in print to that letter that I am aware of). I was very surprised at the reception this response to Giuseppe s question received within two days it got seventy-five up-votes far more than for any of my previous replies to MO questions. A little later, Giuseppe offered to make a L A TEX version of those scanned pages, and I was very happy to agree. He did an excellent job, and what follows is in order: (i) the MO page with Giuseppe s question, (ii) the original scan that I made, and (iii) Giuseppe s L A TEX version. Dick Palais 1
2
3
4
5
6
7
8 On the Symplectic Formulation of Hamiltonian Mechanics Richard S. Palais Definition. A simplectic manifold is a C manifold M 2n together with a closed 2-form Ω of rank 2n (i.e., Ω(X, Y ) is a non-singular (alternating) bilinear form on each M p.) Lemma. Given p M, there exists a coordinate system x 1,..., x 2n near p such that Ω = n i=1 dx i dx n+i. Proof. Ω = dω locally and by classical result on one-forms ω = n i=1 x idx n+i locally. Such coordinates are called canonical this shows that all symplectic manifolds are locally equivalent. If L is a vector field on M, θ a p-form on M, we write ι L θ for contraction of θ with L, i.e., ι L θ is the (p 1)-form given by ι L θ(x 1,..., X p 1 ) = θ(l, X 1,..., X p 1 ). We write L θ for the Lie derivative of θ w.r.t. L. We recall L θ = ι L dθ + dι L θ, i.e., L = ι L d + dι L. If L is a vector field we write L = ι L Ω, a one-form on M. The fact that Ω is non-singular implies that L L is a vector space isomorphism between vector fields and one-forms. We write θ θ for the inverse isomorphism. Remark. If x 1,..., x 2n are canonical coordinates and L = X i x i then n L = X i+n dx i + i=1 n X i dx i+n. i=1 Example. Let M be a Riemannian manifold, P the bundle of covariant vectors over M, and Π : P M the usual projection. Define a one-form ω 1
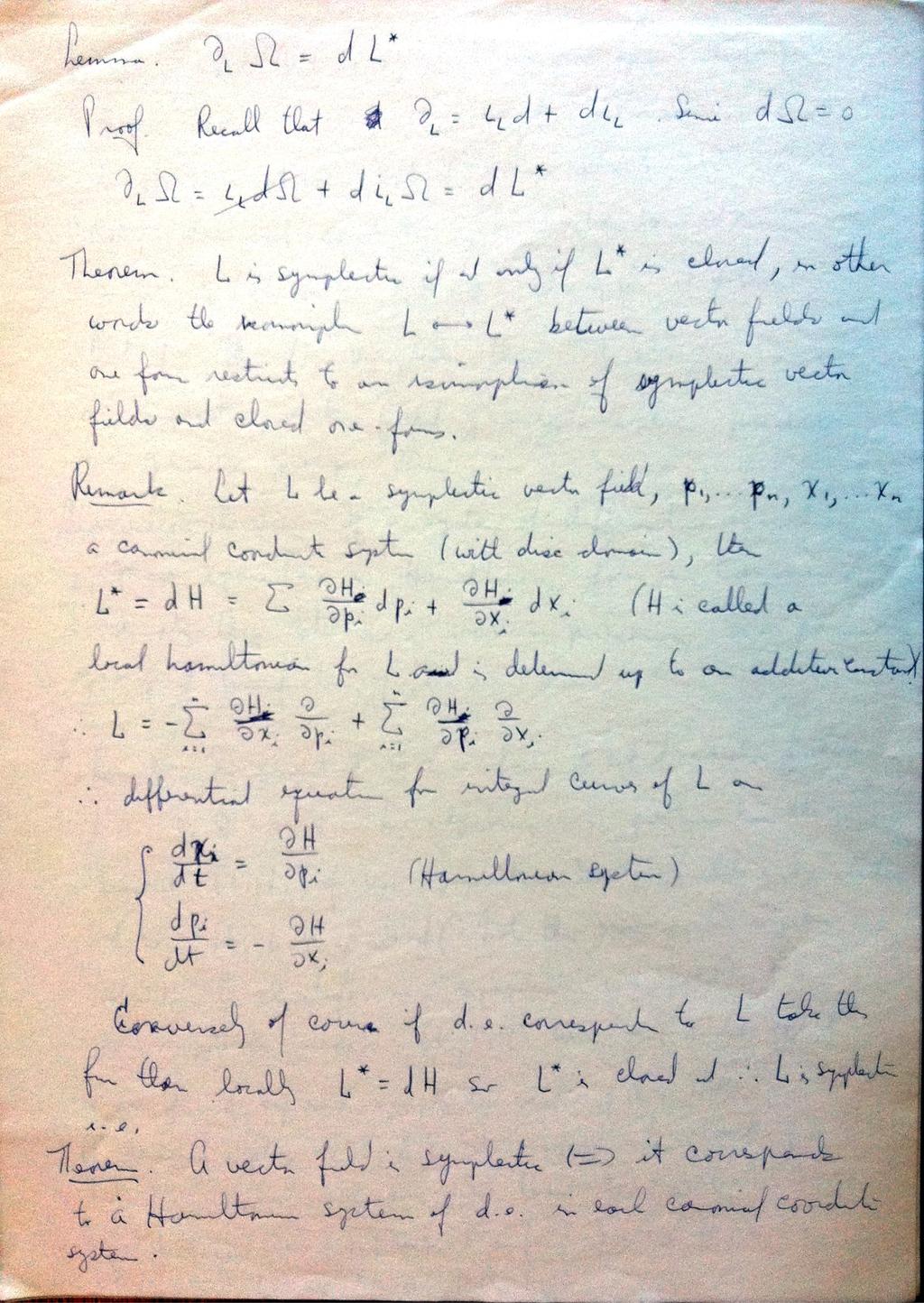
9 on P by ω θ = δπ (θ), put Ω = dω. If x 1,..., x n are coordinates on O M, get coordinates x 1,..., x n, p 1,..., p n on π 1 (O) by { xi (θ) = x i (π(θ)) θ = p i (θ)dx i i.e., x i gives coordinates of base point relative to x 1,..., x n and p i gives i th component of θ relative to x 1,..., x n. It is trivial to check that ω = n i=1 p id x i, hence Ω = dω = d x i dp i, which shows that Ω has rank 2n. Therefore P is a symplectic manifold and x 1,..., x n, p 1,..., p n are canonical coordinates. This symplectic manifold is called the phase space of M. Definition. A vector field L is symplectic if L Ω = 0. (If M is compact, or more generally if L generates a global one-parameter group φ t, this is equivalent to the φ t being symplectic transformations, i.e., preserving Ω.) Lemma. L Ω = dl. Proof. Recall that L = ι L d + dι L. Since dω = 0, then L Ω = ι L dω + dι L Ω = dl. Theorem. L is symplectic if and only if L is closed, in other words the isomorphism L L between vector field and one-forms restricts to an isomorphism of symplectic vector fields and closed one-forms. Remark. Let L be a symplectic vector field, x 1,..., x n, p 1,..., p n a canonical coordinate system (with disc domain), then n ( H L = dh = dx i + H ) dp i. x i p i i=1 (H is called a local hamiltonian for L and is determined up to an additive constant.) Therefore L = n i=1 H p i x i n i=1 H, x i p i and the differential equations for integral curves of L are dx i dt = H p i (Hamiltonian system) dp i dt = H x i 2
10 Conversely of course if differential equations corresponding to L take this form then locally L = dh, so L is closed and therefore L is symplectic. i.e., Theorem. A vector field is symplectic if and only if it corresponds to a Hamiltonian system of differential equations in each canonical coordinate system. Remark. Note that a symplectic manifold has natural forms of degree 2k, (k = 1, 2,..., n), namely Ω k = Ω Ω, (k times). In particular it has a natural volume element Ω n. Note that in canonical coordinates Ω n = n!( 1) [n/2] dx 1 dx 2 dx 2n. Since L (θ ψ) = L θ ψ + θ L ψ, it follows that if L is symplectic then L Ω n = 0, i.e., a symplectic vector field generates a volume preserving one-parameter group. Then Theorem (Liouville s Theorem). If a system of differential equations in phase space P are in Hamiltonian form in canonical coordinates then they determine a volume preserving one-parameter group of transformations of P. Remark. In general if Φ is a form then the set of vector fields L such that L Φ = 0 is a Lie algebra, therefore in particular the bracket [L 1, L 2 ] of two symplectic vector fields is symplectic, and hence [L 1, L 2 ] is closed. (Note this gives a Lie algebra structure to closed forms on a symplectic manifold.) For some mysterious 1 reason [L 1, L 2 ] turns out to be exact, i.e., if S represents symplectic vector fields then the derived algebra [S, S ] gets mapped into exact forms by natural isomorphism. If it is onto then S /[S, S ] (which corresponds to abelianized group of symplectic transformations) is isomorphic to H 1 (M, R). 1 In fact [L 1, L 2 ] = d(ω(l 1, L 2 )). 3
COTANGENT MODELS FOR INTEGRABLE SYSTEMS
 COTANGENT MODELS FOR INTEGRABLE SYSTEMS ANNA KIESENHOFER AND EVA MIRANDA Abstract. We associate cotangent models to a neighbourhood of a Liouville torus in symplectic and Poisson manifolds focusing on
COTANGENT MODELS FOR INTEGRABLE SYSTEMS ANNA KIESENHOFER AND EVA MIRANDA Abstract. We associate cotangent models to a neighbourhood of a Liouville torus in symplectic and Poisson manifolds focusing on
BACKGROUND IN SYMPLECTIC GEOMETRY
 BACKGROUND IN SYMPLECTIC GEOMETRY NILAY KUMAR Today I want to introduce some of the symplectic structure underlying classical mechanics. The key idea is actually quite old and in its various formulations
BACKGROUND IN SYMPLECTIC GEOMETRY NILAY KUMAR Today I want to introduce some of the symplectic structure underlying classical mechanics. The key idea is actually quite old and in its various formulations
Symplectic and Poisson Manifolds
 Symplectic and Poisson Manifolds Harry Smith In this survey we look at the basic definitions relating to symplectic manifolds and Poisson manifolds and consider different examples of these. We go on to
Symplectic and Poisson Manifolds Harry Smith In this survey we look at the basic definitions relating to symplectic manifolds and Poisson manifolds and consider different examples of these. We go on to
1 Contact structures and Reeb vector fields
 1 Contact structures and Reeb vector fields Definition 1.1. Let M be a smooth (2n + 1)-dimensional manifold. A contact structure on M is a maximally non-integrable hyperplane field ξ T M. Suppose that
1 Contact structures and Reeb vector fields Definition 1.1. Let M be a smooth (2n + 1)-dimensional manifold. A contact structure on M is a maximally non-integrable hyperplane field ξ T M. Suppose that
Math 868 Final Exam. Part 1. Complete 5 of the following 7 sentences to make a precise definition (5 points each). Y (φ t ) Y lim
. Y (φ t ) Y lim") SOLUTIONS Dec 13, 218 Math 868 Final Exam In this exam, all manifolds, maps, vector fields, etc. are smooth. Part 1. Complete 5 of the following 7 sentences to make a precise definition (5 points each).
SOLUTIONS Dec 13, 218 Math 868 Final Exam In this exam, all manifolds, maps, vector fields, etc. are smooth. Part 1. Complete 5 of the following 7 sentences to make a precise definition (5 points each).
SYMPLECTIC GEOMETRY: LECTURE 5
 SYMPLECTIC GEOMETRY: LECTURE 5 LIAT KESSLER Let (M, ω) be a connected compact symplectic manifold, T a torus, T M M a Hamiltonian action of T on M, and Φ: M t the assoaciated moment map. Theorem 0.1 (The
SYMPLECTIC GEOMETRY: LECTURE 5 LIAT KESSLER Let (M, ω) be a connected compact symplectic manifold, T a torus, T M M a Hamiltonian action of T on M, and Φ: M t the assoaciated moment map. Theorem 0.1 (The
Hamiltonian flows, cotangent lifts, and momentum maps
 Hamiltonian flows, cotangent lifts, and momentum maps Jordan Bell jordan.bell@gmail.com Department of Mathematics, University of Toronto April 3, 2014 1 Symplectic manifolds Let (M, ω) and (N, η) be symplectic
Hamiltonian flows, cotangent lifts, and momentum maps Jordan Bell jordan.bell@gmail.com Department of Mathematics, University of Toronto April 3, 2014 1 Symplectic manifolds Let (M, ω) and (N, η) be symplectic
Seminar Geometrical aspects of theoretical mechanics
 Seminar Geometrical aspects of theoretical mechanics Topics 1. Manifolds 29.10.12 Gisela Baños-Ros 2. Vector fields 05.11.12 and 12.11.12 Alexander Holm and Matthias Sievers 3. Differential forms 19.11.12,
Seminar Geometrical aspects of theoretical mechanics Topics 1. Manifolds 29.10.12 Gisela Baños-Ros 2. Vector fields 05.11.12 and 12.11.12 Alexander Holm and Matthias Sievers 3. Differential forms 19.11.12,
SYMPLECTIC MANIFOLDS, GEOMETRIC QUANTIZATION, AND UNITARY REPRESENTATIONS OF LIE GROUPS. 1. Introduction
 SYMPLECTIC MANIFOLDS, GEOMETRIC QUANTIZATION, AND UNITARY REPRESENTATIONS OF LIE GROUPS CRAIG JACKSON 1. Introduction Generally speaking, geometric quantization is a scheme for associating Hilbert spaces
SYMPLECTIC MANIFOLDS, GEOMETRIC QUANTIZATION, AND UNITARY REPRESENTATIONS OF LIE GROUPS CRAIG JACKSON 1. Introduction Generally speaking, geometric quantization is a scheme for associating Hilbert spaces
On the holonomy fibration
 based on work with Alejandro Cabrera and Marco Gualtieri Workshop on Geometric Quantization Adelaide, July 2015 Introduction General theme: Hamiltonian LG-spaces q-hamiltonian G-spaces M Ψ Lg /L 0 G /L
based on work with Alejandro Cabrera and Marco Gualtieri Workshop on Geometric Quantization Adelaide, July 2015 Introduction General theme: Hamiltonian LG-spaces q-hamiltonian G-spaces M Ψ Lg /L 0 G /L
GEOMETRIC QUANTIZATION
 GEOMETRIC QUANTIZATION 1. The basic idea The setting of the Hamiltonian version of classical (Newtonian) mechanics is the phase space (position and momentum), which is a symplectic manifold. The typical
GEOMETRIC QUANTIZATION 1. The basic idea The setting of the Hamiltonian version of classical (Newtonian) mechanics is the phase space (position and momentum), which is a symplectic manifold. The typical
Vortex Equations on Riemannian Surfaces
 Vortex Equations on Riemannian Surfaces Amanda Hood, Khoa Nguyen, Joseph Shao Advisor: Chris Woodward Vortex Equations on Riemannian Surfaces p.1/36 Introduction Yang Mills equations: originated from electromagnetism
Vortex Equations on Riemannian Surfaces Amanda Hood, Khoa Nguyen, Joseph Shao Advisor: Chris Woodward Vortex Equations on Riemannian Surfaces p.1/36 Introduction Yang Mills equations: originated from electromagnetism
with a given direct sum decomposition into even and odd pieces, and a map which is bilinear, satisfies the associative law for multiplication, and
 Chapter 2 Rules of calculus. 2.1 Superalgebras. A (commutative associative) superalgebra is a vector space A = A even A odd with a given direct sum decomposition into even and odd pieces, and a map A A
Chapter 2 Rules of calculus. 2.1 Superalgebras. A (commutative associative) superalgebra is a vector space A = A even A odd with a given direct sum decomposition into even and odd pieces, and a map A A
An Introduction to Symplectic Geometry
 An Introduction to Symplectic Geometry Alessandro Fasse Institute for Theoretical Physics University of Cologne These notes are a short sum up about two talks that I gave in August and September 2015 an
An Introduction to Symplectic Geometry Alessandro Fasse Institute for Theoretical Physics University of Cologne These notes are a short sum up about two talks that I gave in August and September 2015 an
Lecture III: Neighbourhoods
 Lecture III: Neighbourhoods Jonathan Evans 7th October 2010 Jonathan Evans () Lecture III: Neighbourhoods 7th October 2010 1 / 18 Jonathan Evans () Lecture III: Neighbourhoods 7th October 2010 2 / 18 In
Lecture III: Neighbourhoods Jonathan Evans 7th October 2010 Jonathan Evans () Lecture III: Neighbourhoods 7th October 2010 1 / 18 Jonathan Evans () Lecture III: Neighbourhoods 7th October 2010 2 / 18 In
Twisted Poisson manifolds and their almost symplectically complete isotropic realizations
 Twisted Poisson manifolds and their almost symplectically complete isotropic realizations Chi-Kwong Fok National Center for Theoretical Sciences Math Division National Tsing Hua University (Joint work
Twisted Poisson manifolds and their almost symplectically complete isotropic realizations Chi-Kwong Fok National Center for Theoretical Sciences Math Division National Tsing Hua University (Joint work
Deformations of coisotropic submanifolds in symplectic geometry
 Deformations of coisotropic submanifolds in symplectic geometry Marco Zambon IAP annual meeting 2015 Symplectic manifolds Definition Let M be a manifold. A symplectic form is a two-form ω Ω 2 (M) which
Deformations of coisotropic submanifolds in symplectic geometry Marco Zambon IAP annual meeting 2015 Symplectic manifolds Definition Let M be a manifold. A symplectic form is a two-form ω Ω 2 (M) which
1. Geometry of the unit tangent bundle
 1 1. Geometry of the unit tangent bundle The main reference for this section is [8]. In the following, we consider (M, g) an n-dimensional smooth manifold endowed with a Riemannian metric g. 1.1. Notations
1 1. Geometry of the unit tangent bundle The main reference for this section is [8]. In the following, we consider (M, g) an n-dimensional smooth manifold endowed with a Riemannian metric g. 1.1. Notations
Chap. 1. Some Differential Geometric Tools
 Chap. 1. Some Differential Geometric Tools 1. Manifold, Diffeomorphism 1.1. The Implicit Function Theorem ϕ : U R n R n p (0 p < n), of class C k (k 1) x 0 U such that ϕ(x 0 ) = 0 rank Dϕ(x) = n p x U
Chap. 1. Some Differential Geometric Tools 1. Manifold, Diffeomorphism 1.1. The Implicit Function Theorem ϕ : U R n R n p (0 p < n), of class C k (k 1) x 0 U such that ϕ(x 0 ) = 0 rank Dϕ(x) = n p x U
An Invitation to Geometric Quantization
 An Invitation to Geometric Quantization Alex Fok Department of Mathematics, Cornell University April 2012 What is quantization? Quantization is a process of associating a classical mechanical system to
An Invitation to Geometric Quantization Alex Fok Department of Mathematics, Cornell University April 2012 What is quantization? Quantization is a process of associating a classical mechanical system to
Smooth Dynamics 2. Problem Set Nr. 1. Instructor: Submitted by: Prof. Wilkinson Clark Butler. University of Chicago Winter 2013
 Smooth Dynamics 2 Problem Set Nr. 1 University of Chicago Winter 2013 Instructor: Submitted by: Prof. Wilkinson Clark Butler Problem 1 Let M be a Riemannian manifold with metric, and Levi-Civita connection.
Smooth Dynamics 2 Problem Set Nr. 1 University of Chicago Winter 2013 Instructor: Submitted by: Prof. Wilkinson Clark Butler Problem 1 Let M be a Riemannian manifold with metric, and Levi-Civita connection.
The Atiyah bundle and connections on a principal bundle
 Proc. Indian Acad. Sci. (Math. Sci.) Vol. 120, No. 3, June 2010, pp. 299 316. Indian Academy of Sciences The Atiyah bundle and connections on a principal bundle INDRANIL BISWAS School of Mathematics, Tata
Proc. Indian Acad. Sci. (Math. Sci.) Vol. 120, No. 3, June 2010, pp. 299 316. Indian Academy of Sciences The Atiyah bundle and connections on a principal bundle INDRANIL BISWAS School of Mathematics, Tata
Some aspects of the Geodesic flow
 Some aspects of the Geodesic flow Pablo C. Abstract This is a presentation for Yael s course on Symplectic Geometry. We discuss here the context in which the geodesic flow can be understood using techniques
Some aspects of the Geodesic flow Pablo C. Abstract This is a presentation for Yael s course on Symplectic Geometry. We discuss here the context in which the geodesic flow can be understood using techniques
Poisson geometry of b-manifolds. Eva Miranda
 Poisson geometry of b-manifolds Eva Miranda UPC-Barcelona Rio de Janeiro, July 26, 2010 Eva Miranda (UPC) Poisson 2010 July 26, 2010 1 / 45 Outline 1 Motivation 2 Classification of b-poisson manifolds
Poisson geometry of b-manifolds Eva Miranda UPC-Barcelona Rio de Janeiro, July 26, 2010 Eva Miranda (UPC) Poisson 2010 July 26, 2010 1 / 45 Outline 1 Motivation 2 Classification of b-poisson manifolds
Exercises in Geometry II University of Bonn, Summer semester 2015 Professor: Prof. Christian Blohmann Assistant: Saskia Voss Sheet 1
 Assistant: Saskia Voss Sheet 1 1. Conformal change of Riemannian metrics [3 points] Let (M, g) be a Riemannian manifold. A conformal change is a nonnegative function λ : M (0, ). Such a function defines
Assistant: Saskia Voss Sheet 1 1. Conformal change of Riemannian metrics [3 points] Let (M, g) be a Riemannian manifold. A conformal change is a nonnegative function λ : M (0, ). Such a function defines
Global Properties of Integrable Hamiltonian Systems
 ISSN 1560-3547, Regular and Chaotic Dynamics, 2008, Vol. 13, No. 6, pp. 588 630. c Pleiades Publishing, Ltd., 2008. JÜRGEN MOSER 80 Global Properties of Integrable Hamiltonian Systems O. Lukina *, F. Takens,
ISSN 1560-3547, Regular and Chaotic Dynamics, 2008, Vol. 13, No. 6, pp. 588 630. c Pleiades Publishing, Ltd., 2008. JÜRGEN MOSER 80 Global Properties of Integrable Hamiltonian Systems O. Lukina *, F. Takens,
Topology III Home Assignment 8 Subhadip Chowdhury
 Topology Home Assignment 8 Subhadip Chowdhury Problem 1 Suppose {X 1,..., X n } is an orthonormal basis of T x M for some point x M. Then by definition, the volume form Ω is defined to be the n form such
Topology Home Assignment 8 Subhadip Chowdhury Problem 1 Suppose {X 1,..., X n } is an orthonormal basis of T x M for some point x M. Then by definition, the volume form Ω is defined to be the n form such
LECTURE 1: LINEAR SYMPLECTIC GEOMETRY
 LECTURE 1: LINEAR SYMPLECTIC GEOMETRY Contents 1. Linear symplectic structure 3 2. Distinguished subspaces 5 3. Linear complex structure 7 4. The symplectic group 10 *********************************************************************************
LECTURE 1: LINEAR SYMPLECTIC GEOMETRY Contents 1. Linear symplectic structure 3 2. Distinguished subspaces 5 3. Linear complex structure 7 4. The symplectic group 10 *********************************************************************************
LECTURE 8: THE MOMENT MAP
 LECTURE 8: THE MOMENT MAP Contents 1. Properties of the moment map 1 2. Existence and Uniqueness of the moment map 4 3. Examples/Exercises of moment maps 7 4. Moment map in gauge theory 9 1. Properties
LECTURE 8: THE MOMENT MAP Contents 1. Properties of the moment map 1 2. Existence and Uniqueness of the moment map 4 3. Examples/Exercises of moment maps 7 4. Moment map in gauge theory 9 1. Properties
A MARSDEN WEINSTEIN REDUCTION THEOREM FOR PRESYMPLECTIC MANIFOLDS
 A MARSDEN WEINSTEIN REDUCTION THEOREM FOR PRESYMPLECTIC MANIFOLDS FRANCESCO BOTTACIN Abstract. In this paper we prove an analogue of the Marsden Weinstein reduction theorem for presymplectic actions of
A MARSDEN WEINSTEIN REDUCTION THEOREM FOR PRESYMPLECTIC MANIFOLDS FRANCESCO BOTTACIN Abstract. In this paper we prove an analogue of the Marsden Weinstein reduction theorem for presymplectic actions of
Synchro-Betatron Motion in Circular Accelerators
 Outlines Synchro-Betatron Motion in Circular Accelerators Kevin Li March 30, 2011 Kevin Li Synchro-Betatron Motion 1/ 70 Outline of Part I Outlines Part I: and Model Introduction Part II: The Transverse
Outlines Synchro-Betatron Motion in Circular Accelerators Kevin Li March 30, 2011 Kevin Li Synchro-Betatron Motion 1/ 70 Outline of Part I Outlines Part I: and Model Introduction Part II: The Transverse
Master of Science in Advanced Mathematics and Mathematical Engineering
 Master of Science in Advanced Mathematics and Mathematical Engineering Title: Constraint algorithm for singular k-cosymplectic field theories Author: Xavier Rivas Guijarro Advisor: Francesc Xavier Gràcia
Master of Science in Advanced Mathematics and Mathematical Engineering Title: Constraint algorithm for singular k-cosymplectic field theories Author: Xavier Rivas Guijarro Advisor: Francesc Xavier Gràcia
NONLINEAR CONNECTION FOR NONCONSERVATIVE MECHANICAL SYSTEMS
 NONLINEAR CONNECTION FOR NONCONSERVATIVE MECHANICAL SYSTEMS IOAN BUCATARU, RADU MIRON Abstract. The geometry of a nonconservative mechanical system is determined by its associated semispray and the corresponding
NONLINEAR CONNECTION FOR NONCONSERVATIVE MECHANICAL SYSTEMS IOAN BUCATARU, RADU MIRON Abstract. The geometry of a nonconservative mechanical system is determined by its associated semispray and the corresponding
B 1 = {B(x, r) x = (x 1, x 2 ) H, 0 < r < x 2 }. (a) Show that B = B 1 B 2 is a basis for a topology on X.
 x = (x 1, x 2 ) H, 0 < r < x 2 }. (a) Show that B = B 1 B 2 is a basis for a topology on X.") Math 6342/7350: Topology and Geometry Sample Preliminary Exam Questions 1. For each of the following topological spaces X i, determine whether X i and X i X i are homeomorphic. (a) X 1 = [0, 1] (b) X 2
Math 6342/7350: Topology and Geometry Sample Preliminary Exam Questions 1. For each of the following topological spaces X i, determine whether X i and X i X i are homeomorphic. (a) X 1 = [0, 1] (b) X 2
Differential Geometry MTG 6257 Spring 2018 Problem Set 4 Due-date: Wednesday, 4/25/18
 Differential Geometry MTG 6257 Spring 2018 Problem Set 4 Due-date: Wednesday, 4/25/18 Required problems (to be handed in): 2bc, 3, 5c, 5d(i). In doing any of these problems, you may assume the results
Differential Geometry MTG 6257 Spring 2018 Problem Set 4 Due-date: Wednesday, 4/25/18 Required problems (to be handed in): 2bc, 3, 5c, 5d(i). In doing any of these problems, you may assume the results
Symplectic geometry of deformation spaces
 July 15, 2010 Outline What is a symplectic structure? What is a symplectic structure? Denition A symplectic structure on a (smooth) manifold M is a closed nondegenerate 2-form ω. Examples Darboux coordinates
July 15, 2010 Outline What is a symplectic structure? What is a symplectic structure? Denition A symplectic structure on a (smooth) manifold M is a closed nondegenerate 2-form ω. Examples Darboux coordinates
LECTURE 5: SOME BASIC CONSTRUCTIONS IN SYMPLECTIC TOPOLOGY
 LECTURE 5: SOME BASIC CONSTRUCTIONS IN SYMPLECTIC TOPOLOGY WEIMIN CHEN, UMASS, SPRING 07 1. Blowing up and symplectic cutting In complex geometry the blowing-up operation amounts to replace a point in
LECTURE 5: SOME BASIC CONSTRUCTIONS IN SYMPLECTIC TOPOLOGY WEIMIN CHEN, UMASS, SPRING 07 1. Blowing up and symplectic cutting In complex geometry the blowing-up operation amounts to replace a point in
Topics in Representation Theory: Cultural Background
 Topics in Representation Theory: Cultural Background This semester we will be covering various topics in representation theory, see the separate syllabus for a detailed list of topics, including some that
Topics in Representation Theory: Cultural Background This semester we will be covering various topics in representation theory, see the separate syllabus for a detailed list of topics, including some that
ON EXACT POISSON STRUCTURES
 ON EXACT POISSON STRUCTURES YINGFEI YI AND XIANG ZHANG Abstract By studying the exactness of multi-linear vectors on an orientable smooth manifold M, we give some characterizations to exact Poisson structures
ON EXACT POISSON STRUCTURES YINGFEI YI AND XIANG ZHANG Abstract By studying the exactness of multi-linear vectors on an orientable smooth manifold M, we give some characterizations to exact Poisson structures
Hamiltonian Systems of Negative Curvature are Hyperbolic
 Hamiltonian Systems of Negative Curvature are Hyperbolic A. A. Agrachev N. N. Chtcherbakova Abstract The curvature and the reduced curvature are basic differential invariants of the pair: Hamiltonian system,
Hamiltonian Systems of Negative Curvature are Hyperbolic A. A. Agrachev N. N. Chtcherbakova Abstract The curvature and the reduced curvature are basic differential invariants of the pair: Hamiltonian system,
Dierential geometry for Physicists
 Dierential geometry for Physicists (What we discussed in the course of lectures) Marián Fecko Comenius University, Bratislava Syllabus of lectures delivered at University of Regensburg in June and July
Dierential geometry for Physicists (What we discussed in the course of lectures) Marián Fecko Comenius University, Bratislava Syllabus of lectures delivered at University of Regensburg in June and July
A Crash Course of Floer Homology for Lagrangian Intersections
 A Crash Course of Floer Homology for Lagrangian Intersections Manabu AKAHO Department of Mathematics Tokyo Metropolitan University akaho@math.metro-u.ac.jp 1 Introduction There are several kinds of Floer
A Crash Course of Floer Homology for Lagrangian Intersections Manabu AKAHO Department of Mathematics Tokyo Metropolitan University akaho@math.metro-u.ac.jp 1 Introduction There are several kinds of Floer
Hard Lefschetz Theorem for Vaisman manifolds
 Hard Lefschetz Theorem for Vaisman manifolds Antonio De Nicola CMUC, University of Coimbra, Portugal joint work with B. Cappelletti-Montano (Univ. Cagliari), J.C. Marrero (Univ. La Laguna) and I. Yudin
Hard Lefschetz Theorem for Vaisman manifolds Antonio De Nicola CMUC, University of Coimbra, Portugal joint work with B. Cappelletti-Montano (Univ. Cagliari), J.C. Marrero (Univ. La Laguna) and I. Yudin
SOME EXERCISES IN CHARACTERISTIC CLASSES
 SOME EXERCISES IN CHARACTERISTIC CLASSES 1. GAUSSIAN CURVATURE AND GAUSS-BONNET THEOREM Let S R 3 be a smooth surface with Riemannian metric g induced from R 3. Its Levi-Civita connection can be defined
SOME EXERCISES IN CHARACTERISTIC CLASSES 1. GAUSSIAN CURVATURE AND GAUSS-BONNET THEOREM Let S R 3 be a smooth surface with Riemannian metric g induced from R 3. Its Levi-Civita connection can be defined
Lecture I: Constrained Hamiltonian systems
 Lecture I: Constrained Hamiltonian systems (Courses in canonical gravity) Yaser Tavakoli December 15, 2014 1 Introduction In canonical formulation of general relativity, geometry of space-time is given
Lecture I: Constrained Hamiltonian systems (Courses in canonical gravity) Yaser Tavakoli December 15, 2014 1 Introduction In canonical formulation of general relativity, geometry of space-time is given
Tree-adjoined spaces and the Hawaiian earring
 Tree-adjoined spaces and the Hawaiian earring W. Hojka (TU Wien) Workshop on Fractals and Tilings 2009 July 6-10, 2009, Strobl (Austria) W. Hojka (TU Wien) () Tree-adjoined spaces and the Hawaiian earring
Tree-adjoined spaces and the Hawaiian earring W. Hojka (TU Wien) Workshop on Fractals and Tilings 2009 July 6-10, 2009, Strobl (Austria) W. Hojka (TU Wien) () Tree-adjoined spaces and the Hawaiian earring
LECTURE 3 MATH 261A. Office hours are now settled to be after class on Thursdays from 12 : 30 2 in Evans 815, or still by appointment.
 LECTURE 3 MATH 261A LECTURES BY: PROFESSOR DAVID NADLER PROFESSOR NOTES BY: JACKSON VAN DYKE Office hours are now settled to be after class on Thursdays from 12 : 30 2 in Evans 815, or still by appointment.
LECTURE 3 MATH 261A LECTURES BY: PROFESSOR DAVID NADLER PROFESSOR NOTES BY: JACKSON VAN DYKE Office hours are now settled to be after class on Thursdays from 12 : 30 2 in Evans 815, or still by appointment.
INSTANTON MODULI AND COMPACTIFICATION MATTHEW MAHOWALD
 INSTANTON MODULI AND COMPACTIFICATION MATTHEW MAHOWALD () Instanton (definition) (2) ADHM construction (3) Compactification. Instantons.. Notation. Throughout this talk, we will use the following notation:
INSTANTON MODULI AND COMPACTIFICATION MATTHEW MAHOWALD () Instanton (definition) (2) ADHM construction (3) Compactification. Instantons.. Notation. Throughout this talk, we will use the following notation:
COMPUTING THE POISSON COHOMOLOGY OF A B-POISSON MANIFOLD
 COMPUTING THE POISSON COHOMOLOGY OF A B-POISSON MANIFOLD MELINDA LANIUS 1. introduction Because Poisson cohomology is quite challenging to compute, there are only very select cases where the answer is
COMPUTING THE POISSON COHOMOLOGY OF A B-POISSON MANIFOLD MELINDA LANIUS 1. introduction Because Poisson cohomology is quite challenging to compute, there are only very select cases where the answer is
Solutions of M3-4A16 Assessed Problems # 3 [#1] Exercises in exterior calculus operations
![Solutions of M3-4A16 Assessed Problems # 3 [#1] Exercises in exterior calculus operations](/thumbs/87/96222240.jpg "Solutions of M3-4A16 Assessed Problems # 3 [#1] Exercises in exterior calculus operations") D. D. Holm Solutions to M3-4A16 Assessed Problems # 3 15 Dec 2010 1 Solutions of M3-4A16 Assessed Problems # 3 [#1] Exercises in exterior calculus operations Vector notation for differential basis elements:
D. D. Holm Solutions to M3-4A16 Assessed Problems # 3 15 Dec 2010 1 Solutions of M3-4A16 Assessed Problems # 3 [#1] Exercises in exterior calculus operations Vector notation for differential basis elements:
Lie 2-algebras from 2-plectic geometry
 Lie 2-algebras from 2-plectic geometry Chris Rogers joint with John Baez and Alex Hoffnung Department of Mathematics University of California, Riverside XVIIIth Oporto Meeting on Geometry, Topology and
Lie 2-algebras from 2-plectic geometry Chris Rogers joint with John Baez and Alex Hoffnung Department of Mathematics University of California, Riverside XVIIIth Oporto Meeting on Geometry, Topology and
Generalized Contact Structures
 Generalized Contact Structures Y. S. Poon, UC Riverside June 17, 2009 Kähler and Sasakian Geometry in Rome in collaboration with Aissa Wade Table of Contents 1 Lie bialgebroids and Deformations 2 Generalized
Generalized Contact Structures Y. S. Poon, UC Riverside June 17, 2009 Kähler and Sasakian Geometry in Rome in collaboration with Aissa Wade Table of Contents 1 Lie bialgebroids and Deformations 2 Generalized
Relation of the covariant and Lie derivatives and its application to Hydrodynamics
 Relation of the covariant and Lie derivatives and its application to Hydrodynamics Yang Cao TU Darmstadt March 12, 2010 The Euler hydrodynamic equation on manifolds Let M denote a compact oriented Riemannian
Relation of the covariant and Lie derivatives and its application to Hydrodynamics Yang Cao TU Darmstadt March 12, 2010 The Euler hydrodynamic equation on manifolds Let M denote a compact oriented Riemannian
BRST 2006 (jmf) 7. g X (M) X ξ X. X η = [ξ X,η]. (X θ)(η) := X θ(η) θ(x η) = ξ X θ(η) θ([ξ X,η]).
![BRST 2006 (jmf) 7. g X (M) X ξ X. X η = [ξ X,η]. (X θ)(η) := X θ(η) θ(x η) = ξ X θ(η) θ([ξ X,η]).](/thumbs/80/81160538.jpg "BRST 2006 (jmf) 7. g X (M) X ξ X. X η = [ξ X,η]. (X θ)(η) := X θ(η) θ(x η) = ξ X θ(η) θ([ξ X,η]).") BRST 2006 (jmf) 7 Lecture 2: Symplectic reduction In this lecture we discuss group actions on symplectic manifolds and symplectic reduction. We start with some generalities about group actions on manifolds.
BRST 2006 (jmf) 7 Lecture 2: Symplectic reduction In this lecture we discuss group actions on symplectic manifolds and symplectic reduction. We start with some generalities about group actions on manifolds.
Noether Symmetries and Conserved Momenta of Dirac Equation in Presymplectic Dynamics
 International Mathematical Forum, 2, 2007, no. 45, 2207-2220 Noether Symmetries and Conserved Momenta of Dirac Equation in Presymplectic Dynamics Renato Grassini Department of Mathematics and Applications
International Mathematical Forum, 2, 2007, no. 45, 2207-2220 Noether Symmetries and Conserved Momenta of Dirac Equation in Presymplectic Dynamics Renato Grassini Department of Mathematics and Applications
PICARD S THEOREM STEFAN FRIEDL
 PICARD S THEOREM STEFAN FRIEDL Abstract. We give a summary for the proof of Picard s Theorem. The proof is for the most part an excerpt of [F]. 1. Introduction Definition. Let U C be an open subset. A
PICARD S THEOREM STEFAN FRIEDL Abstract. We give a summary for the proof of Picard s Theorem. The proof is for the most part an excerpt of [F]. 1. Introduction Definition. Let U C be an open subset. A
V = 1 2 (g ijχ i h j ) (2.4)
 (2.4)") 4 VASILY PESTUN 2. Lecture: Localization 2.. Euler class of vector bundle, Mathai-Quillen form and Poincare-Hopf theorem. We will present the Euler class of a vector bundle can be presented in the form
4 VASILY PESTUN 2. Lecture: Localization 2.. Euler class of vector bundle, Mathai-Quillen form and Poincare-Hopf theorem. We will present the Euler class of a vector bundle can be presented in the form
Hamilton-Jacobi theory on Lie algebroids: Applications to nonholonomic mechanics. Manuel de León Institute of Mathematical Sciences CSIC, Spain
 Hamilton-Jacobi theory on Lie algebroids: Applications to nonholonomic mechanics Manuel de León Institute of Mathematical Sciences CSIC, Spain joint work with J.C. Marrero (University of La Laguna) D.
Hamilton-Jacobi theory on Lie algebroids: Applications to nonholonomic mechanics Manuel de León Institute of Mathematical Sciences CSIC, Spain joint work with J.C. Marrero (University of La Laguna) D.
Math 550 / David Dumas / Fall Problems
 Math 550 / David Dumas / Fall 2014 Problems Please note: This list was last updated on November 30, 2014. Problems marked with * are challenge problems. Some problems are adapted from the course texts;
Math 550 / David Dumas / Fall 2014 Problems Please note: This list was last updated on November 30, 2014. Problems marked with * are challenge problems. Some problems are adapted from the course texts;
QUATERNIONS AND ROTATIONS
 QUATERNIONS AND ROTATIONS SVANTE JANSON 1. Introduction The purpose of this note is to show some well-known relations between quaternions and the Lie groups SO(3) and SO(4) (rotations in R 3 and R 4 )
QUATERNIONS AND ROTATIONS SVANTE JANSON 1. Introduction The purpose of this note is to show some well-known relations between quaternions and the Lie groups SO(3) and SO(4) (rotations in R 3 and R 4 )
Solutions to the Hamilton-Jacobi equation as Lagrangian submanifolds
 Solutions to the Hamilton-Jacobi equation as Lagrangian submanifolds Matias Dahl January 2004 1 Introduction In this essay we shall study the following problem: Suppose is a smooth -manifold, is a function,
Solutions to the Hamilton-Jacobi equation as Lagrangian submanifolds Matias Dahl January 2004 1 Introduction In this essay we shall study the following problem: Suppose is a smooth -manifold, is a function,
Lecture 5 - Lie Algebra Cohomology II
 Lecture 5 - Lie Algebra Cohomology II January 28, 2013 1 Motivation: Left-invariant modules over a group Given a vector bundle F ξ G over G where G has a representation on F, a left G- action on ξ is a
Lecture 5 - Lie Algebra Cohomology II January 28, 2013 1 Motivation: Left-invariant modules over a group Given a vector bundle F ξ G over G where G has a representation on F, a left G- action on ξ is a
Qualifying Examination HARVARD UNIVERSITY Department of Mathematics Tuesday, January 19, 2016 (Day 1)
") Qualifying Examination HARVARD UNIVERSITY Department of Mathematics Tuesday, January 19, 2016 (Day 1) PROBLEM 1 (DG) Let S denote the surface in R 3 where the coordinates (x, y, z) obey x 2 + y 2 = 1 +
Qualifying Examination HARVARD UNIVERSITY Department of Mathematics Tuesday, January 19, 2016 (Day 1) PROBLEM 1 (DG) Let S denote the surface in R 3 where the coordinates (x, y, z) obey x 2 + y 2 = 1 +
Notes on symplectic geometry and group actions
 Notes on symplectic geometry and group actions Peter Hochs November 5, 2013 Contents 1 Example of Hamiltonian mechanics 1 2 Proper actions and Hausdorff quotients 4 3 N particles in R 3 7 4 Commuting actions
Notes on symplectic geometry and group actions Peter Hochs November 5, 2013 Contents 1 Example of Hamiltonian mechanics 1 2 Proper actions and Hausdorff quotients 4 3 N particles in R 3 7 4 Commuting actions
Lie algebra cohomology
 Lie algebra cohomology Relation to the de Rham cohomology of Lie groups Presented by: Gazmend Mavraj (Master Mathematics and Diploma Physics) Supervisor: J-Prof. Dr. Christoph Wockel (Section Algebra and
Lie algebra cohomology Relation to the de Rham cohomology of Lie groups Presented by: Gazmend Mavraj (Master Mathematics and Diploma Physics) Supervisor: J-Prof. Dr. Christoph Wockel (Section Algebra and
Solvable Lie groups and the shear construction
 Solvable Lie groups and the shear construction Marco Freibert jt. with Andrew Swann Mathematisches Seminar, Christian-Albrechts-Universität zu Kiel 19.05.2016 1 Swann s twist 2 The shear construction The
Solvable Lie groups and the shear construction Marco Freibert jt. with Andrew Swann Mathematisches Seminar, Christian-Albrechts-Universität zu Kiel 19.05.2016 1 Swann s twist 2 The shear construction The
Eilenberg-Steenrod properties. (Hatcher, 2.1, 2.3, 3.1; Conlon, 2.6, 8.1, )
") II.3 : Eilenberg-Steenrod properties (Hatcher, 2.1, 2.3, 3.1; Conlon, 2.6, 8.1, 8.3 8.5 Definition. Let U be an open subset of R n for some n. The de Rham cohomology groups (U are the cohomology groups
II.3 : Eilenberg-Steenrod properties (Hatcher, 2.1, 2.3, 3.1; Conlon, 2.6, 8.1, 8.3 8.5 Definition. Let U be an open subset of R n for some n. The de Rham cohomology groups (U are the cohomology groups
Symplectic geometry and Calogero-Moser. system,
 Symplectic geometry and Calogero-Moser systems Lukas Rødland Supervisor: Luigi Tizzano Subject reader: Maxime Zabzine Bachelor of Science Degree in Physics Uppsala University June 25, 2015 Abstract We
Symplectic geometry and Calogero-Moser systems Lukas Rødland Supervisor: Luigi Tizzano Subject reader: Maxime Zabzine Bachelor of Science Degree in Physics Uppsala University June 25, 2015 Abstract We
Title. Author(s)YAMAGUCHI, KEIZO. CitationHokkaido University Preprint Series in Mathematics, Issue Date DOI / Doc URL.
YAMAGUCHI, KEIZO. CitationHokkaido University Preprint Series in Mathematics, Issue Date DOI / Doc URL.") Title G2- GEOMETRY IN CONTACT GEOMETRY OF SECOND ORDER Author(s)YAMAGUCHI, KEIZO CitationHokkaido University Preprint Series in Mathematics, Issue Date 2018-05-15 DOI 10.14943/84415 Doc URL http://hdl.handle.net/2115/70227
Title G2- GEOMETRY IN CONTACT GEOMETRY OF SECOND ORDER Author(s)YAMAGUCHI, KEIZO CitationHokkaido University Preprint Series in Mathematics, Issue Date 2018-05-15 DOI 10.14943/84415 Doc URL http://hdl.handle.net/2115/70227
The Dirac-Ramond operator and vertex algebras
 The Dirac-Ramond operator and vertex algebras Westfälische Wilhelms-Universität Münster cvoigt@math.uni-muenster.de http://wwwmath.uni-muenster.de/reine/u/cvoigt/ Vanderbilt May 11, 2011 Kasparov theory
The Dirac-Ramond operator and vertex algebras Westfälische Wilhelms-Universität Münster cvoigt@math.uni-muenster.de http://wwwmath.uni-muenster.de/reine/u/cvoigt/ Vanderbilt May 11, 2011 Kasparov theory
Lagrangian submanifolds and generating functions
 Chapter 4 Lagrangian submanifolds and generating functions Motivated by theorem 3.9 we will now study properties of the manifold Λ φ X (R n \{0}) for a clean phase function φ. As shown in section 3.3 Λ
Chapter 4 Lagrangian submanifolds and generating functions Motivated by theorem 3.9 we will now study properties of the manifold Λ φ X (R n \{0}) for a clean phase function φ. As shown in section 3.3 Λ
LECTURE: KOBORDISMENTHEORIE, WINTER TERM 2011/12; SUMMARY AND LITERATURE
 LECTURE: KOBORDISMENTHEORIE, WINTER TERM 2011/12; SUMMARY AND LITERATURE JOHANNES EBERT 1.1. October 11th. 1. Recapitulation from differential topology Definition 1.1. Let M m, N n, be two smooth manifolds
LECTURE: KOBORDISMENTHEORIE, WINTER TERM 2011/12; SUMMARY AND LITERATURE JOHANNES EBERT 1.1. October 11th. 1. Recapitulation from differential topology Definition 1.1. Let M m, N n, be two smooth manifolds
Geometric Quantization
 math-ph/0208008 Geometric Quantization arxiv:math-ph/0208008v3 4 Sep 2002 William Gordon Ritter Jefferson Physical Laboratory, Harvard University Cambridge, MA 02138, USA February 3, 2008 Abstract We review
math-ph/0208008 Geometric Quantization arxiv:math-ph/0208008v3 4 Sep 2002 William Gordon Ritter Jefferson Physical Laboratory, Harvard University Cambridge, MA 02138, USA February 3, 2008 Abstract We review
L6: Almost complex structures
 L6: Almost complex structures To study general symplectic manifolds, rather than Kähler manifolds, it is helpful to extract the homotopy-theoretic essence of having a complex structure. An almost complex
L6: Almost complex structures To study general symplectic manifolds, rather than Kähler manifolds, it is helpful to extract the homotopy-theoretic essence of having a complex structure. An almost complex
Lecture Notes on Equivariant Cohomology
 Lecture Notes on Equivariant Cohomology atvei Libine April 26, 2007 1 Introduction These are the lecture notes for the introductory graduate course I taught at Yale during Spring 2007. I mostly followed
Lecture Notes on Equivariant Cohomology atvei Libine April 26, 2007 1 Introduction These are the lecture notes for the introductory graduate course I taught at Yale during Spring 2007. I mostly followed
Symplectic Geometry versus Riemannian Geometry
 Symplectic Geometry versus Riemannian Geometry Inês Cruz, CMUP 2010/10/20 - seminar of PIUDM 1 necessarily very incomplete The aim of this talk is to give an overview of Symplectic Geometry (there is no
Symplectic Geometry versus Riemannian Geometry Inês Cruz, CMUP 2010/10/20 - seminar of PIUDM 1 necessarily very incomplete The aim of this talk is to give an overview of Symplectic Geometry (there is no
Spin(10,1)-metrics with a parallel null spinor and maximal holonomy
-metrics with a parallel null spinor and maximal holonomy") Spin(10,1)-metrics with a parallel null spinor and maximal holonomy 0. Introduction. The purpose of this addendum to the earlier notes on spinors is to outline the construction of Lorentzian metrics in
Spin(10,1)-metrics with a parallel null spinor and maximal holonomy 0. Introduction. The purpose of this addendum to the earlier notes on spinors is to outline the construction of Lorentzian metrics in
DERIVED HAMILTONIAN REDUCTION
 DERIVED HAMILTONIAN REDUCTION PAVEL SAFRONOV 1. Classical definitions 1.1. Motivation. In classical mechanics the main object of study is a symplectic manifold X together with a Hamiltonian function H
DERIVED HAMILTONIAN REDUCTION PAVEL SAFRONOV 1. Classical definitions 1.1. Motivation. In classical mechanics the main object of study is a symplectic manifold X together with a Hamiltonian function H
Master of Science in Advanced Mathematics and Mathematical Engineering
 Master of Science in Advanced Mathematics and Mathematical Engineering Title: Symplectic structures with singularities Author: Arnau Planas Bahí Advisor: Eva Miranda Galcerán Department: Matemàtica Aplicada
Master of Science in Advanced Mathematics and Mathematical Engineering Title: Symplectic structures with singularities Author: Arnau Planas Bahí Advisor: Eva Miranda Galcerán Department: Matemàtica Aplicada
Tesi di Laurea Magistrale in Matematica presentata da. Claudia Dennetta. Symplectic Geometry. Il Relatore. Prof. Massimiliano Pontecorvo
 UNIVERSITÀ DEGLI STUDI ROMA TRE FACOLTÀ DI SCIENZE M.F.N. Tesi di Laurea Magistrale in Matematica presentata da Claudia Dennetta Symplectic Geometry Relatore Prof. Massimiliano Pontecorvo Il Candidato
UNIVERSITÀ DEGLI STUDI ROMA TRE FACOLTÀ DI SCIENZE M.F.N. Tesi di Laurea Magistrale in Matematica presentata da Claudia Dennetta Symplectic Geometry Relatore Prof. Massimiliano Pontecorvo Il Candidato
The topology of symplectic four-manifolds
 The topology of symplectic four-manifolds Michael Usher January 12, 2007 Definition A symplectic manifold is a pair (M, ω) where 1 M is a smooth manifold of some even dimension 2n. 2 ω Ω 2 (M) is a two-form
The topology of symplectic four-manifolds Michael Usher January 12, 2007 Definition A symplectic manifold is a pair (M, ω) where 1 M is a smooth manifold of some even dimension 2n. 2 ω Ω 2 (M) is a two-form
E 0 0 F [E] + [F ] = 3. Chern-Weil Theory How can you tell if idempotents over X are similar?
![E 0 0 F [E] + [F ] = 3. Chern-Weil Theory How can you tell if idempotents over X are similar?](/thumbs/84/90664534.jpg "E 0 0 F [E] + [F ] = 3. Chern-Weil Theory How can you tell if idempotents over X are similar?") . Characteristic Classes from the viewpoint of Operator Theory. Introduction Overarching Question: How can you tell if two vector bundles over a manifold are isomorphic? Let X be a compact Hausdorff space.
. Characteristic Classes from the viewpoint of Operator Theory. Introduction Overarching Question: How can you tell if two vector bundles over a manifold are isomorphic? Let X be a compact Hausdorff space.
Deformations of Coisotropic Submanifolds of Jacobi Manifolds
 Deformations of Coisotropic Submanifolds of Jacobi Manifolds Luca Vitagliano University of Salerno, Italy (in collaboration with: H. V. Lê, Y.-G. Oh, and A. Tortorella) GAMMP, Dortmund, March 16 19, 2015
Deformations of Coisotropic Submanifolds of Jacobi Manifolds Luca Vitagliano University of Salerno, Italy (in collaboration with: H. V. Lê, Y.-G. Oh, and A. Tortorella) GAMMP, Dortmund, March 16 19, 2015
LECTURE 26: THE CHERN-WEIL THEORY
 LECTURE 26: THE CHERN-WEIL THEORY 1. Invariant Polynomials We start with some necessary backgrounds on invariant polynomials. Let V be a vector space. Recall that a k-tensor T k V is called symmetric if
LECTURE 26: THE CHERN-WEIL THEORY 1. Invariant Polynomials We start with some necessary backgrounds on invariant polynomials. Let V be a vector space. Recall that a k-tensor T k V is called symmetric if
THE LAGRANGIAN AND HAMILTONIAN MECHANICAL SYSTEMS
 THE LAGRANGIAN AND HAMILTONIAN MECHANICAL SYSTEMS ALEXANDER TOLISH Abstract. Newton s Laws of Motion, which equate forces with the timerates of change of momenta, are a convenient way to describe mechanical
THE LAGRANGIAN AND HAMILTONIAN MECHANICAL SYSTEMS ALEXANDER TOLISH Abstract. Newton s Laws of Motion, which equate forces with the timerates of change of momenta, are a convenient way to describe mechanical
The Magnetic Spherical Pendulum
 The Magnetic Spherical Pendulum R. Cushman L. Bates Abstract This article gives two formulae for the rotation number of the flow of the magnetic spherical pendulum on a torus corresponding to a regular
The Magnetic Spherical Pendulum R. Cushman L. Bates Abstract This article gives two formulae for the rotation number of the flow of the magnetic spherical pendulum on a torus corresponding to a regular
LECTURE 5: COMPLEX AND KÄHLER MANIFOLDS
 LECTURE 5: COMPLEX AND KÄHLER MANIFOLDS Contents 1. Almost complex manifolds 1. Complex manifolds 5 3. Kähler manifolds 9 4. Dolbeault cohomology 11 1. Almost complex manifolds Almost complex structures.
LECTURE 5: COMPLEX AND KÄHLER MANIFOLDS Contents 1. Almost complex manifolds 1. Complex manifolds 5 3. Kähler manifolds 9 4. Dolbeault cohomology 11 1. Almost complex manifolds Almost complex structures.
1.2. Examples of symplectic manifolds 1. (R 2n, ω 0 = n
 Introduction to the geometry of hamiltonian diffeomorphisms Augustin Banyaga The Pennsylvania State University, University Park, PA 16803, USA Lecture Notes of a mini-course delivered at the Seminaire
Introduction to the geometry of hamiltonian diffeomorphisms Augustin Banyaga The Pennsylvania State University, University Park, PA 16803, USA Lecture Notes of a mini-course delivered at the Seminaire
NilBott Tower of Aspherical Manifolds and Torus Actions
 NilBott Tower of Aspherical Manifolds and Torus Actions Tokyo Metropolitan University November 29, 2011 (Tokyo NilBottMetropolitan Tower of Aspherical University) Manifolds and Torus ActionsNovember 29,
NilBott Tower of Aspherical Manifolds and Torus Actions Tokyo Metropolitan University November 29, 2011 (Tokyo NilBottMetropolitan Tower of Aspherical University) Manifolds and Torus ActionsNovember 29,
fy (X(g)) Y (f)x(g) gy (X(f)) Y (g)x(f)) = fx(y (g)) + gx(y (f)) fy (X(g)) gy (X(f))
) Y (f)x(g) gy (X(f)) Y (g)x(f)) = fx(y (g)) + gx(y (f)) fy (X(g)) gy (X(f))") 1. Basic algebra of vector fields Let V be a finite dimensional vector space over R. Recall that V = {L : V R} is defined to be the set of all linear maps to R. V is isomorphic to V, but there is no canonical
1. Basic algebra of vector fields Let V be a finite dimensional vector space over R. Recall that V = {L : V R} is defined to be the set of all linear maps to R. V is isomorphic to V, but there is no canonical
Dirac structures. Henrique Bursztyn, IMPA. Geometry, mechanics and dynamics: the legacy of J. Marsden Fields Institute, July 2012
 Dirac structures Henrique Bursztyn, IMPA Geometry, mechanics and dynamics: the legacy of J. Marsden Fields Institute, July 2012 Outline: 1. Mechanics and constraints (Dirac s theory) 2. Degenerate symplectic
Dirac structures Henrique Bursztyn, IMPA Geometry, mechanics and dynamics: the legacy of J. Marsden Fields Institute, July 2012 Outline: 1. Mechanics and constraints (Dirac s theory) 2. Degenerate symplectic
THE EXISTENCE PROBLEM
 THE EXISTENCE PROBLEM Contact Geometry in High Dimensions Emmanuel Giroux CNRS ENS Lyon AIM May 21, 2012 Contact forms A contact form on a manifold V is a non-vanishing 1-form α whose differential dα at
THE EXISTENCE PROBLEM Contact Geometry in High Dimensions Emmanuel Giroux CNRS ENS Lyon AIM May 21, 2012 Contact forms A contact form on a manifold V is a non-vanishing 1-form α whose differential dα at
The Bianchi Identity in Path Space
 The Bianchi Identity in Path Space Matt Noonan January 15, 2007 this is a test. Abstract 1 Two Geometric Problems Throughout this paper, we will be interested in local problems; therefore, we will take
The Bianchi Identity in Path Space Matt Noonan January 15, 2007 this is a test. Abstract 1 Two Geometric Problems Throughout this paper, we will be interested in local problems; therefore, we will take
GRAPHICALITY, C 0 CONVERGENCE, AND THE CALABI HOMOMORPHISM
 GRAPHICALITY, C CONVERGENCE, AND THE CALABI HOMOMORPHISM MICHAEL USHER Abstract. Consider a sequence of compactly supported Hamiltonian diffeomorphisms φ k of an exact symplectic manifold, all of which
GRAPHICALITY, C CONVERGENCE, AND THE CALABI HOMOMORPHISM MICHAEL USHER Abstract. Consider a sequence of compactly supported Hamiltonian diffeomorphisms φ k of an exact symplectic manifold, all of which
CONTROLLABILITY OF NILPOTENT SYSTEMS
 GEOMETRY IN NONLINEAR CONTROL AND DIFFERENTIAL INCLUSIONS BANACH CENTER PUBLICATIONS, VOLUME 32 INSTITUTE OF MATHEMATICS POLISH ACADEMY OF SCIENCES WARSZAWA 1995 CONTROLLABILITY OF NILPOTENT SYSTEMS VICTOR
GEOMETRY IN NONLINEAR CONTROL AND DIFFERENTIAL INCLUSIONS BANACH CENTER PUBLICATIONS, VOLUME 32 INSTITUTE OF MATHEMATICS POLISH ACADEMY OF SCIENCES WARSZAWA 1995 CONTROLLABILITY OF NILPOTENT SYSTEMS VICTOR
Geometry and Dynamics of singular symplectic manifolds. Session 9: Some applications of the path method in b-symplectic geometry
 Geometry and Dynamics of singular symplectic manifolds Session 9: Some applications of the path method in b-symplectic geometry Eva Miranda (UPC-CEREMADE-IMCCE-IMJ) Fondation Sciences Mathématiques de
Geometry and Dynamics of singular symplectic manifolds Session 9: Some applications of the path method in b-symplectic geometry Eva Miranda (UPC-CEREMADE-IMCCE-IMJ) Fondation Sciences Mathématiques de
THE LONGITUDINAL KAM-COCYCLE OF A MAGNETIC FLOW
 THE LONGITUDINAL KAM-COCYCLE OF A MAGNETIC FLOW GABRIEL P. PATERNAIN Abstract. Let M be a closed oriented surface of negative Gaussian curvature and let Ω be a non-exact 2-form. Let λ be a small positive
THE LONGITUDINAL KAM-COCYCLE OF A MAGNETIC FLOW GABRIEL P. PATERNAIN Abstract. Let M be a closed oriented surface of negative Gaussian curvature and let Ω be a non-exact 2-form. Let λ be a small positive
Lagrangian submanifolds in elliptic and log symplectic manifolds
 Lagrangian submanifolds in elliptic and log symplectic manifolds joint work with arco Gualtieri (University of Toronto) Charlotte Kirchhoff-Lukat University of Cambridge Geometry and ynamics in Interaction
Lagrangian submanifolds in elliptic and log symplectic manifolds joint work with arco Gualtieri (University of Toronto) Charlotte Kirchhoff-Lukat University of Cambridge Geometry and ynamics in Interaction
The theory of manifolds Lecture 2
 The theory of manifolds Lecture 2 Let X be a subset of R N, Y a subset of R n and f : X Y a continuous map. We recall Definition 1. f is a C map if for every p X, there exists a neighborhood, U p, of p
The theory of manifolds Lecture 2 Let X be a subset of R N, Y a subset of R n and f : X Y a continuous map. We recall Definition 1. f is a C map if for every p X, there exists a neighborhood, U p, of p
WICK ROTATIONS AND HOLOMORPHIC RIEMANNIAN GEOMETRY
 WICK ROTATIONS AND HOLOMORPHIC RIEMANNIAN GEOMETRY Geometry and Lie Theory, Eldar Strøme 70th birthday Sigbjørn Hervik, University of Stavanger Work sponsored by the RCN! (Toppforsk-Fellesløftet) REFERENCES
WICK ROTATIONS AND HOLOMORPHIC RIEMANNIAN GEOMETRY Geometry and Lie Theory, Eldar Strøme 70th birthday Sigbjørn Hervik, University of Stavanger Work sponsored by the RCN! (Toppforsk-Fellesløftet) REFERENCES