University of California, Irvine. Dissertation. Doctor of Philosophy. in Physics. by Carina Kamaga
|
|
|
- Mariah Norman
- 5 years ago
- Views:
Transcription
1 University of California, Irvine Domain Coarsening in Electroconvection Dynamics of Topological Defects in the Striped System Dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Physics by Carina Kamaga 2004 Dissertation Committee: Professor Michael Dennin, Chair Professor Peter Toborek Professor Clare Yu
2 Portions of Ch.?? All other materials c 1999 Labsphere, Inc. c 2004 Carina Kamaga
3 The dissertation of Carina Kamaga is approved and is acceptable in quality and form for publication on microfilm: Committee Chair University of California, Irvine 2004 ii
4 Table of Contents List of Figures v 1 Introduction 1 2 Theory Domain Coarsening Topological Defects Physics of Liquid Crystal for Electroconvection Electroconvection Instabilities and Pattern Formation Experimental Method Apparatus Shadowgraph Technique Electronic System Temperature Control Image Analysis Detection of Dislocation Domain Coarsening in Modulated Pattern Introduction Experimental Details Results Summary Study of Dislocation in Anisotropic system Introduction Experimental Details Results Summary Dislocation/Domain Wall Dynamics with an Influence of Quench Depth Introduction Experimental Details Results iii
5 6.4 Summary Bibliography 95 iv
6 List of Figures v
7 Chapter 1 Introduction A sudden change of an external parameter to a system is called a quench. When a system experiences a quench which takes it from one phase to another phase of broken symmetry, generally, topological defects nucleate. If the system has degenerate free energy states to be minimized, domains of the degenerate states are also nucleated. Then, dynamics proceeds by coarsening of domains. For example, in the Ising model, domains of spin up and down are formed. Boundaries/walls of these domains costs more energy. Therefore, domains coarsen to minimize the length of the walls and to minimize the energy. For thermodynamic systems, one can classify the system by the types of order parameters. The scaling hypothesis proposes that a single length scale exists, that grows as a power law, t n, and governs the domain growth. The exponent, n, is determined by the order parameter in the system of interest. For non-conserved order parameters, the system has a characteristic length which scales with t 1/2 for late time dynamics. For conserved order parameters, the scaling hypothesis suggest a length that scales with t 1/3. Recent theoretical work has elucidated the fact that 1
8 2 this universal behavior can be understood in terms of dynamics of topological defects such as grain boundaries and dislocations [1, 2]. In the spatially extended pattern forming systems described by nonlinear partial differential equations or ordinary differential equations, spontaneous symmetry breaking transitions occur as a function of driving energy. Because the system is far from equilibrium, minimization of free energy is not generally relevant. For pattern forming systems, external energy is applied to the system constantly. Such a system is referred to as a driven system. Though these systems never approach thermodynamic equilibrium, they often posses steady states. In pattern forming systems, the idea of a quench and phase ordering still applies in these cases. Our aim is to study the coarsening behavior in such a pattern forming system. There are three questions. (1) Are there any universal exponents or even a scaling regime in the absence of a free energy? (2) How does the phase ordering in the pattern, wave vectors come into play? (3) How much does the anisotropic system differ from the isotropic system? Domain coarsening in pattern forming systems is much less understood than thermodynamic systems. In a pattern forming system, the system has a local parameter which is spatially modulated. Example includes Rayleigh-Bénard convection, diblock copolymers, and electroconvection. Both theoretical work [3, 4, 5, 6, 2, 7] and experimental work [8, 9, 10] in domain coarsening have been conducted in these systems. After a quench, in a pattern forming system, growth of spatial correlations driven by defect dynamics have been observed. Depending on the system, different types of topological defects are observed. For diblock copolymer [10, 11], disclinations and dislocations are formed after the quench. A very careful study of disclination dy-
9 3 namics in the striped ordering state has been reported in [10]. In this system, the system is isotropic, and a thermodynamic quench is used. Minimization of free energy applies in this system. They observed that the structure factor of domains scale with t 1/4. This exponent is different from a uniform thermodynamic system. The dynamics of topological defects in these striped patterns appear to be critical in setting this exponent. Therefore, understanding of scaling remains an open question in pattern forming systems. Simulations also have shown the importance of understanding the dynamics of topological defects in striped systems if one expects to understand coarsening in patterned systems [2, 12] For electroconvection with stationary rolls, regular grain boundaries and dislocations are formed as domain walls after a driven quench. In this thesis, a careful study of domain walls; either made of dislocations or grain boundaries or superposition of two zig and zag states are reported. Three experiments are reported in this thesis. Motivations of each experiment are introduced in each chapter.
10 Chapter 2 Theory This section contains the basic theory for domain coarsening and the pattern formation in electroconvection. For domain coarsening, the idea of order parameter, types of defects, and scalar hypothesis are discussed in section Sec For pattern formation in electroconvection, general properties of liquid crystals, the idea of convection and pattern formation are discussed in Sec. 2.3 to Sec The section of pattern formation in electroconvection is mainly based on [13], [14], [15],and [16]. 2.1 Domain Coarsening When a quench, a sudden change in external parameter, is applied to the system, domains of degenerate states and topological defects are nucleated. The subsequent dynamics is referred to as domain coarsening (domain growth) or phase ordering. The phase does not order instantaneously. Instead, the different degenerate states compete to select the equilibrium state for the system. There have been a number of 4
11 5 studies, both theoretical and experimental, on domain coarsening for systems where both the initial state prior to the quench and the final state after the quench are thermodynamic equilibrium states at finite temperature. For studies of coarsening, systems can be classified into two types: thermal systems and driven systems. A thermal system approaches a thermal equilibrium state as its final state. A driven system does not reach a thermal equilibrium state but reaches a stationary state. Detail studies of coarsening in thermal systems exist [17], [18]. One classic example is the Ising model. For the Ising model at a high temperature, the averaged magnetization is zero. In this case, the order parameter, < φ >, is the local magnetization. The local magnetization has no order. At a low enough temperature, there is a spontaneous magnetization. When a temperature quench is applied to the system to a value below its critical temperature, T c, the system chooses one of the degenerate states, ±M o, as a final state. The system does not reach its final state spontaneously. The dynamics when the system is approaching its final state is called coarsening. The scaling hypothesis states there exists a single characteristic length scale, L(t) such that domain structure is independent of time when lengths are scaled by L(t). Two commonly used tools to measure the size of domain structures are the correlation function and the structure factor, its Fourier transform. C(r, t) =< φ(x + r, t)φ < x, t) > (2.1) S(k, t) =< φ k (t)φ k (t) >. (2.2)
12 forms: The correlation function and the structure factor can be scaled in the following 6 C(r, t) = f( r L ) (2.3) S(k, t) = L d g(kl) (2.4) where d is the spatial dimension, and g(y) is the fourier transform of f(x). Two different scaling dynamics are observed in thermal systems depending on the type of order parameter: non-conserved (model A) and conserved (model B) field. For conserved order parameters (model A), one can derive the L(T ) from the Allen-Chann equation 2.5 as follows. v = ĝ = K (2.5) where ĝ is a unit vector normal to the wall, and K ĝ is d-1 times the mean curvature of the domain wall. If there is a single characteristic length, L, then the wall velocity can be written as v dl dt and the curvature as K 1. Combining these L two equation by integration, the result produces L(t) t 1/2. In the later time of coarsening, the dynamics is dominated by the movements of the order parameter from the walls with greater curvature to the ones with less curvature. For a conserved parameter (model B), domain walls cannot move freely. Therefore, the derivation of L(t) for a conserved parameter is more complicated than the case for model A. In order to derive the boundary conditions at the walls, it is more convenient to use the chemical potential µ δf δφ where F is the free energy,
13 7 than to use the domain wall function, φ, itself. By writing the continuity equation in terms of chemical potentials, and using the idea of curvature, one can write the chemical potential in the following form 2.6. µ = σk 2 (2.6) where σ is the surface tension. As mentioned above, curvature can be written as K 1. Therefore, chemical potential can be written as µ σ, the wall velocity L L as dl dt = µ σ L 2. Then, this leads to L(t) t 1/3. Note our understanding of coarsening dynamics in both model A and model B, requires the minimization of free energy as a fundamental concept. For the case of a driven system, the pattern forming system, the idea of minimization of free energy does not exist. Therefore, there is no direct theoretical derivation for the coarsening dynamics. As mentioned in Sec. 2.4, there are model equations developed for pattern forming system. Using the model equations, a number of simulation for domain coarsening behavior has been studied [3, 2, 6, 4] 2.2 Topological Defects As mentioned in Sec.??, systems with broken symmetry contain topological defects. A topological defect in general is categorized by its core region. A core region can be a line or a point. At a core region, the system s order parameter is zero: a singularity point. Similar to an electric point charge, its property can be determined by measurements of an appropriate field of the system that it s in. Topological defects have different names depending on the type of broken symmetry. For example, in
14 8 superfluid and xy-models, defects are called vortices. In periodic crystals, they are called dislocations, and in nematic liquid crystals, disclinations. In this section, brief properties of these three defects are described. For xy model, the magnitude of the order parameter has a form of < s(x) >= s(cos θ(x), sin θ(x)). (2.7) The angle variable, θ(x) is continuous. At the location of a defect, the magnitude of order parameter goes to zero. A defect in a system described by 2.7 is called a vortex. The angle, θ, with a specific direction of the order parameter changes by 2π around a closed counter loop enclosing the core of the vortex Fig Figure 2.1: A diagram of vortex Dislocations exist as a topological defect in systems where the order parameter has periodic phases. For example, in the ideal smectic phase, the order parameters
15 9 which represents a mass density, has the form < ψ n >= 1 V < e inq o x > < ψ n > e iq ou. (2.8) There is a uniform translation, x x + ue z. A spatially uniform increment of u from zero to u corresponds to a uniform translation of the coordinate system. Thus, a uniform translation by ue z decreases the phase φ n of the order parameter < ψ n > by nq o u. ψ n = ψn o nq o u (2.9) Similar to the xy model, dislocations in the periodic order parameter can be classified by the following equation, du = Γ du ds b (2.10) ds where Γ is a curve enclosing the core. The vector, b is called a Burgers vector, which translates changes in spatial displacements, u into changes in order parameter. A diagram of a dislocation is shown in Fig. 2.2 For dislocations, b in 2.10 has a value of ±2π. One can define a charge q = b 2π. Dislocation has a charge q = ±1. For disclinations, there is a phase change with a value of ±π, Fig:disclination. In electroconvection, when oblique rolls are formed, the pattern contains dislocations. No disclinations are observed. Grain boundaries, are also observed as a defect in electroconvection. For grain boundaries, there is no singularity point.
16 10 Figure 2.2: A diagram of dislocations seen in smectic liquid crystal Figure 2.3: A digarm of disclination 2.3 Physics of Liquid Crystal for Electroconvection We study domain coarsening using electroconvection. For electroconvection, nematic liquid crystals are used.
17 11 Organic materials with coexistence of two thermodynamic properties, fluid (no long-range order) and crystal (broken symmetry in the rotational order) are called liquid crystals. The geometrical molecular structures are responsible for these unique thermodynamic states. There are two general classes of molecular structures observed in liquid crystals: rod-like elongated molecules and disk-like molecules. Three different classes of phases exist in liquid crystals. Nematic and smectic phases are made of elongated molecules. Columnar phases are made of disk-like molecules. All experiments in this thesis are conducted with the nematic state of liquid crystals. The vector field n, called the director, is defined as the local mean orientation of the molecules. This selects an axis, which with respect to parallel and perpendicular is defined in all notation that follows. Some of the main properties of nematic are as follows. (1) The centers of gravity of the molecules have no long-range order. The correlations in position among the neighboring molecules are similar to a conventional fluid except for the anisotropy in length scale, L L. (2) There is orientational order of molecules along a particular axis, n. This is responsible for the macroscopic tensor properties. For example, the magnetic susceptibility χ, the dielectric constant ɛ, the index of refraction and the electrical and thermal conductivities σ and λ, can be written in the general form: b ij = b δ ij + b a n i n j (2.11) where the n i is the component of the director. For a given material property b, b is the principle value perpendicular to the director; b is the principle value parallel to the director; and b a = b b is the anisotropy of the material parameter. (3)
18 12 The direction of n is arbitrary in space. The nematic liquid crystals have a broken rotational symmetry. It is the same as a cylindrical symmetry. However, external fields can produce uniform alignment of n in a preselected direction. (4) The states of director n and n are indistinguishable. The anisotropy of χ and ɛ is responsible for the alignment of the director when an external magnetic and electric field is applied. For example, when H is applied at an arbitrary angle with respect to n, the induced magnetic field, M has a form of M = χ H + χ a (H n)n (2.12) where χ a = χ χ is positive in nematics, usually. For χ a > 0 (ɛ a > 0), the director aligns parallel to the applied magnetic (electric) field, and for χ a < 0 (ɛ a < 0), the director aligns perpendicular to the applied magnetic (electric) field. Therefore the direction of alignment is independent of the strength of the external field. The induced magnetization contributes to the free energy density. Ideally, all the molecules are aligned along one axis, ±n. However, in practice, there is some amount of deformation of the alignment. This deformation can be described by a continuum theory. It is averaged over large enough regions to disregard dynamics of individual molecules, but small enough to be treated as a point from the scale of entire system. For nematics, the distortion of energy has the form: F d = 1 2 K 1(divn) K 2(n) K 3(n curln) 2 (2.13) The elastic constants K i represent the types of deformation. K 1 is referred to as the splay elastic constant, K 2 is the twist elastic constant, and K 3 is to the bend elastic
19 13 constant. For equilibrium, the total distortion energy F = F d dr is a minimum Figure 2.4: The three orientational deformations: (a)splay (divn 0); (b)twist (n curln 0); (c)bend (n curln 0). with respect to all variation of the director n(r). Using the Euler-Lagrange equations with Lagrange multipliers, δf j [ δ( j n i ) ] δf = λ(x)n i (2.14) δn i where δ is a functional derivative and λ(x) is a Lagrange multiplier, an arbitrary function of x. The molecular function, h is defined δf h i = j [ δ( j n) ] δf. (2.15) δn i h is useful because when the system is in equilibrium, h and n have to be parallel to each other, h i + λ(x)n i = 0. Since h and n are in parallel, the cross product of these are zero for a static orientational equilibrium, Γ d n h = 0. (2.16)
20 Due to an isotropy of susceptibilities and the dielectric constant, the orientation of the director is also influenced by applied magnetic and electric fields. 14 Γ m = M H = n h m (2.17) with h m = χ a (n h) n. (2.18) Similarly, for the electric field, Γ e = n h e withh e = ɛ a (n E)E (2.19) 4π In the absence of external fields, the alignment of a liquid crystal in the nematic state generates elastic torques. The molecular alignment at the boundary of sample affects the orientation of the bulk. Common cases are planar alignment where the alignment is parallel to the boundary, and homeotropic alignment where the alignment is perpendicular to the alignment. In this thesis, we only used samples with planar alignment. In the nematic state, the flow behavior is described by the coupling between the velocity field and its orientation, (n, v). The hydrodynamics of nematics can be described by the Navier Stokes Equation, ρ( t v i + (v )v i ) = j T ij + f i (2.20) where ρ is the density, v i are the components of the velocity, f i is body forces to be discussed below, and T ij are the components of the stress tensor. T ij = pδ ij f el n k,i + t ij (2.21)
21 where p is the pressure and the viscous contribution, and t ij contains the six Leslie 15 shear viscosity coefficients, α ij. The relation between the stress and the strain is described by the following equation. t ij = α 1 n k n m A km n i n j + α 2 n i N j + α 3 n j N i + α 4 A ij + α 5 n i n k A kj + α 6 n j n k A ki (2.22) where A i,j is the positional strain tensor, A i,j = 1 2 (D i,j + D j,i ). The tensor, D ij describes the velocity shear, D ij = v i / x j. By fulfilling the thermodynamic inequalities, the Onsager condition is derived. α 2 + α 3 = α 6 α 5 (2.23) In equilibrium, the sum of the torque is equal to zero. n (h d + h m + h e ) + Γ v = 0 (2.24) where Γ v u = σ v vw σ v wv with (u, v, w) a circular permutation of (x, y, z). The dielectric and conductivity tensors ɛ and σ have the form ɛ ij = ɛ δ ij + ɛ a n i nj, (2.25) σ ij = σ δ ij + σ a n i n j (2.26) 2.4 Electroconvection The standard model (SM) is used to describe the general dynamics of electroconvection. For planar alignment of the director, an electric field applied perpendicular to the director, ionic impurities with a nonzero conductivity, σ, and a positive
22 16 σ a = σ σ, electroconvection in SM is referred to as the Carr-Helfrich mechanism [13]. The weak-electrolyte model (WEM), was developed to explain the Hopf bifuraction. The Hopf Bifurcation is the bifurcation to travelling states. In the WEM, a dissociation-recombination reaction for the positive and negative ions are included in the theory. In the SM, the conductivity of the sample is independent of the applied frequency. Therefore, the electric field and the current are derived from Ohm s Law. In this section, I will follow the Carr-Helfrich mechanism for a simple description of electroconvection. For SM, the Navier-Stokes equation,2.20 with the body force f i = ρ e (x)e i (x) is combined with the incompressibility ( v = 0), the conservation of angular momentum (equation), the equation of electrostatics, [ɛ o ɛe(x)] = ρ e (x) (2.27) E(x) = 0 (2.28) and the charge conservation, j(x) + j ρ e (x) = 0 (2.29) where ρ e (x) is the charge density of the ionic impurities, E(x) is the applied electric field, ɛ is the dielectric tensor, and ɛ o is the dielectric constant of the vacuum. The electric current, j(x) has a form of j(x) = σe(x) + ρ e (x)v. (2.30)
23 17 Note that ρ e is x dependent, and that σ is a constant conductivity tensor. The Helfrich model includes the fluctuation of the director. The alignment of the director can be written as n = [1, 0, φ(x)] including a fluctuation of the director and assuming that φ(x) is small. This is for a case where the director has planar alignment in the x z plane. Consider that a constant dc electric field is applied in the z direction, E z. If there is a fluctuation angle φ for the director orientation, E z produces a current in the x-direction, I x = σ a E z φ(x). This leads to charge separation of positive and negative ions in the x-direction and results in non-zero charge density, ρ e (x). The charge separation produces a field in the x-direction which generates an opposing current I x = σ E x. For steady state, charge conservation gives the relationship σ x E x = σ a E z x φ. (2.31) The charge density, ρ e (x) generated by E z can be derived by the Poison s equation, (ɛe) = ρ e. Therefore, ρ e = ɛ o ɛ x E x = ɛ o ɛ σ a σ E z x φ. (2.32) E z ρ e contributes as a body force in the Navier Stokes equation. For a steady state flow, t v = 0. In the case of electroconvection, it is reasonable to assume that the viscous terms dominate over the nonlinear term, (v )v. Therefore the Navier Stokes equation for this case can be written as 0 = η c 2 xv z = E z ρ e = E 2 zɛ o ɛ σ a σ x φ. (2.33) For both φ(x) and v z (x) have a single Fourier mode with wavenumber q. Then, one can write 2 xv z = iq x v z. Therefore, the equation above becomes
24 18 iqη c x v z = Exɛ 2 o ɛ σ a x φ. (2.34) x v z creates a torque on the director, Γ v = (0, α 2 x v z,0). By balancing with the elastic torque, Γ d = (0, (K 33 xφ), 2 0), one can write, K 33 2 xφ = α 2x v z. (2.35) Using, 2 xφ = iq x φ to eliminate x φ, one can combine equation above and?? as E 2 c = K 33σ η c q 2 c α 2 ɛ o ɛσ a (2.36) where q c is the critical wavenumber, and q c scales as the thickness of the cell d. Using V c = E c d and q c π/d, V 2 c = πk 33σ η c ( α 2 )ɛ o ɛσ a. (2.37) Because of the d dependance in the generation of pattern, the voltage square V 2 is used as a control parameter in electroconvection as one can see from the equation above. 2.5 Instabilities and Pattern Formation For most nonlinear partial differential equations, general analytic solutions do not exist. However, specific solutions are known. A useful approach for understanding the behavior of such solutions is linear stability analysis.
25 19 I will use the notation for the nonlinear partial differential equation for the state U as t U(x, t) = G[U, x U,..., R] (2.38) The equation above depends on the gradients and higher partial derivatives of U and R, the control parameter. For electroconvection, U includes the velocity field, the director field, and the ion concentration. G[U] includes the Navier-Stokes equation, conservation of angular momentum, the equations of electrostatics and charge conservation. R for electroconvection is the square of applied voltage. Assume that U o (t) is a given solution of the equation of motion. Using linear stability analysis, one determines the stability of the solution. We consider a solution, U(t) with a small perturbation applied. U(t) = U o (t) + δu(t). (2.39) For simplicity, I will consider the one dimensional case with U o = 0. Fourier modes for δu can be written as δu(t) δu q (t)e iqx+λt (2.40) for individual wavenumber, q. By inserting this solution into the equation 2.38, we obtain the eigenvalue problem, λu(x, t) = D[ x iq, R, U(x, t)] (2.41) where D is the linear operator obtained by expanding refeq:eigenpde. The eigenvalues of D, λ α (q, R) is dependent on q and the control parameters, R. The eigenvalues, λ, have the form of λ = σ(q, R) + iω(q, R). The largest real part, σ dominates the
26 20 dynamics. If σ < 0, then all the perturbations, U q (t)e iqx+λt, decay exponentially with time. If λ > 0, then the perturbations grow exponentially with time, and U o (t) is linearly unstable to the perturbations with a wavenumber, q. For the condition, σ = 0, the control parameter, R o is called the neutral surface in q space. It separates the unstable (R > R o (q)) from stable (R < R o (q)) modes. The threshold, R c, of instability is obtained by minimizing R o with respect to q. The corresponding wavevector is called the critical wave vector, q c. For electroconvection, we take an ansatz, U q (t)e iqx+λt with q = (q x, q y ) = (q, p), which diagonalizes the problem. Similar to the treatment in the one dimensional case, the critical wave vector q c is obtained by minimizing R o. Note that the critical wave vector q c can be degenerate. If the direction of q c = (q c, p c ) has p c = 0, then the pattern is called normal rolls for anisotropic system such as electroconvection. If the direction of q c has q c = 0, then it is called parallel rolls. If q c is at an oblique angle, then one speaks of oblique rolls. Two symmetry degenerate directions, q c = (q c, p c ) and q c = ( q c, p c ), are called zig and zag. Using the reduced control parameter ɛ = (R R c )/R c, (2.42) three characteristic behaviors of λ(q) are plotted in Fig For ɛ < 0, Reλ(q, ɛ) = σ < 0 for all wavevectors, q, and the mode are all stable. There are no rolls formed. For ɛ = 0, the uniform state has one unstable mode with wavevector, q c. For ɛ > 0, there is a band of wave vectors with unstable modes. For unstable modes, if the imaginary part of λ has a nonzero value, then the pattern has
27 21 growth (arb. units) 0 ε > 0 ε = 0 ε < 0 0 q-q_critical (arb. units) Figure 2.5: The figure illustrates the three possibilities for λ(q q c, ε). For ε = 0, a single q with non-negative growth rate exists at a value of q c exists. a travelling frequency, a hopf bifurcation. If λ is zero, then the pattern is stationary. The Gizburg-Landau(GL) equation is a useful tool to describe the dynamics near the critical point where ɛ is small. For thermodynamic systems, the GL equation is generally used to describe continuous phase transition: the transitions such as a superconducting state. The GL equation has been very useful for describing many aspects of pattern forming system such as, RBC and EC near the bifurcation point. For Taylor Vortex Flow (TVF), the GL equation can be derived from the full equation of motion. Rayleigh-Benard(RBC) convection is the instability of a fluid layer which is confined between two thermally conducting plates, and is heated from below to produce a fixed temperature difference. A classic pattern formation is Taylor vortex
28 22 flow, which is obtained between two concentric rotating cylinders. In the simplest case only the inner cylinder is rotating. For the case of electroconvection, the derivation of the amplitude equation is more complex. One often derives the appropriate amplitude equation by evaluating the symmetry of the system. For example, for systems invariant under A(x, t) A(x, t) in one dimension to the lowest nonlinear order the amplitude equation can be written as τ o t A(x, t) = ɛa + ξ o 2 x 2 A(x, t) g A 2 A. (2.43) Because deriving the amplitude equations is very complex for electroconvection, the constants τ o, ξ o, q c, and g are usually obtained experimentally. Also, note that the amplitude equation describes systems such as electroconvection very well when the system is close to its critical point where ɛ is small. The GL is for an amplitude equation A(x, t), and it describes the dynamics of A(x, t) which varies in time, t and slowly in space, x. For simplicity, the unstable stationary periodic state with a single wavenumber, q has a form of U(x, t) = ψ(y, z)a(x, t)exp(iqx) + cc + higherorder. (2.44) ψ is the eigenvector of the linearized equation, and cc is the complex conjugate. A(x, t) is the amplitude, and it is a complex variable. The spatial variation of the amplitude can be written as A(x, t) = A(x, t) exp[iφ(x, t)] = A(x, t) e i[q(x,t) iq c(x,t)]x. (2.45)
29 23 Here, dφ/dx is the local variation in wavenumber away from its critical wavenumber, q c. The phase and the modulus of A evolves with time. The substitution of the complex amplitude in the form of equation 2.5 into the amplitude equation,2.43 produces two coupled equations, τ o A = ξ o 2 [A A(φ ) 2 ] + ɛa ga 3 (2.46) and 2 ξ o τ o φ = ( A 2 )(A2 φ ) = 2ξ o 2 φ A (2.47) A + q o2 φ Although the theoretical understanding of electroconvection patterns based on constitutive equations is still incomplete, some nonlinear models that rely on equations for a local order parameter and on symmetry arguments have been proposed. A certain subclass of dynamical systems are called potential or gradient systems. For stationary bifurcations, model equations, A(x, t), can be derived from the variational principle. It has the form of τ t A = δf δa (2.48) where F[A] is called a Lyapunov functional. F decreases under the dynamics, so that the system reaches a minimum of F corresponding to a time independent model equation. Swift-Hohenberg is another useful equation for studying of domain coarsening. Swift-Hohenberg equations use the order parameter, Ψ = Aexp[ikx] rather than
30 24 order parameter to be just an amplitude, A(x, t). It is one of the widely used model equation, especially for the simulation of complex spatio temporal patterns. The most common form of the equation for isotropic system is Ψ t ξ2 = ɛψ ( + q 2 4qc 2 c ) 2 Ψ gψ 3. (2.49) In this form 2.49, there is a potential. A different form is used for anisotropic systems [19, 12].
31 Chapter 3 Experimental Method This chapter is composed of two main sections, the apparatus and the image analysis. Sec and Sec describe the design of the apparatus. Note, most of the apparatus design was done by others. My contribution to the hardware part of the apparatus is the addition of the motors for domain coarsening experiments. In Sec , the general technique of image processing for detection of dislocations in electroconvection is introduced. 3.1 Apparatus This section consists of three parts, the image system, the temperature system, and the electronic system. Fig. 3.1 shows the anatomy of the apparatus. Fig. 3.3, Fig. 3.4, and Fig. 3.5 show the detail description of the electronic system, motors with the sample stage, and the temperature control system, respectively. 25
32 26 Figure 3.1: The overview of electronics Shadowgraph Technique The shadowgraph [20, 21] is a well developed imaging technique for a system with variation in the index of refraction, n, or the dielectric constant, ε. It is a popular imaging technique for the many fluid systems. Perhaps the simplest example is the case of Rayleigh-Benard Convection (RBC). For Rayleigh-Benard Convection(RBC), the fluid is confined between two plates. A thermal gradient is imposed on the system by heating from below and cooling from above. When the gradient exceeds its critical value, convection rolls of rising hot fluid and sinking cold fluid are formed. The convection pattern is visualized using the shadowgraph technique. The variations in temperature cause variations in the density of the fluid, which results in variations in the index of refraction. The rays are bent toward regions with high index of refraction, n. A warm fraction of fluids diverges light and a cold one converges light. Therefore, hot fluid corresponds to a dark part, and cold fluid to a bright part in the resulting image.
33 27 [20] and [21] provide the detailed calculation of the shadowgraph signals in the geometrical optics limit. [20] and [21] include the calculation for RBC and EC. The shadowgraph method is very similar to diffraction. The horizontal periodic variation in n can be considered similar to a phase grating or an amplitude grating. For a phase grating or an amplitude grating, the incoming parallel light behaves as the step function by passing through such a media. For a media with the horizontal periodic variation in n, a light behaves as a periodic sinusoidal like function in the horizontal direction instead of a step function. An interference of the diffracted incoming light produces the intensity pattern. The optical apparatus for EC is the modification of RBC apparatus. The modification is needed by the property of the director. As discussed for the case of thermal convection with simple fluids, the variation of n is in direct proportion to variations in the fluid density imposed by the thermal variation in fluids. A warm fraction of fluids corresponds to a dark part, and a cold fraction corresponds to a bright part in the shadowgraph image for a convection. Thermal convection, therefore, has a direct relation between the wavelength of the physical pattern and the wavelength of the pattern in the shadowgraph. However, the case of electroconvection is more complicated. In thermal convection, density gradients cause the deflection. In electroconvection, the refraction of the extraordinary light in the nematic liquid crystals is responsible for the deflection pattern. As described in Sec. 2.3, the dielectric constant ε and the index of refraction n are tensors, and they are anisotropic. An index of refraction parallel to the director is defined n e = n = ε. An index of refraction perpendicular to the director is defined n o = n = ε. The anisotropy in the index of refraction of
34 nematic liquid crystals in Sec. 2.3 impacts propagation of the different polarizations of light, n e n o. The effective index of refraction has a periodicity with θ 2 in the 28 horizontal direction, [20]. Here the angle θ is defined to be an angle of distorted director respect to the undistorted one. This is the contribution from the phase grating in the resulting shadowgraph image. The phase grating generates the resulting shadowgraph pattern with a half of its physical wavelength. This effect is called the nonlinear or quadratic shadowgraph effect. The detail calculation of the path of the light in the convection cell for is in [20]. The intensity modulation in the cell also contributes to the resulting shadowgraph. The velocity of light polarized perpendicular to the director is different from the velocity of light polarized parallel to the direction of the director. Most of the liquid crystals have the value of n e greater than n o. The polarization perpendicular to the director has greater value in velocity, v e. The light shifts along the director. This light property produces the intensity modulation in the outgoing light, but the direction of the outgoing light is not changed. There is no convergence of the outgoing rays because of the boundary. At the boundaries, the liquid crystals are biased to align perpendicular to the plate. Therefore, the outgoing rays leave the cell perpendicular to the plate. This intensity modulation produces the shadowgraph image with a periodicity of θ, which is the same periodicity as the physical pattern of directors. This effect is called the linear effect. The pattern produced by the intensity modulation has a constant amplitude in the direction of z. However, the pattern produced by the phase grating is focused. It
35 29 has a zero amplitude at the surface of the cell, z = 0, and a maximum at the caustic. Therefore, our optics is set to focus near the top of the cell where the linear effect dominates in the image. The typical wavelength of pattern in electroconvection is 10 to 100 µm. In order to observe the pattern, we use an image setup which is similar to a microscope. Two lenses are set for the appropriate magnification. A simple lens s law, 1/f = 1/i + i/o and M = i/o, is used for obtaining such a magnification. For definition, f is the focal length of the lens. i is the distance to the image, and o is the distance to the object. We use achromat lenses [22]. The optical setup varies depending on the experiments. Above two lenses, a CCD camera [23] is mounted. One can also obtain the Fourier transformed image by changing the optical setup, Fig When applied voltage is above its critical value, the periodic distortion of index of refraction form. As mentioned in Sec , the electroconvection cell behaves similar to the multiple grating slots. Multiple grating slots produces step function like out going rays. For electroconvection cells, instead of step function like rays, one observes sinusoidal like rays. However, the similar physical laws apply to the elctroconvection. One can adjust the focus so that the Fourier space is projected on the CCD camera. The image of Fourier image of electroconvection is shown in Fig Electronic System The computer with a pci-6111e card outputs a maximum voltage of 5V for DC and 5 V rms for an ac. For an ac voltage, the computer outputs maximum of Hz

![[24]. The BNC terminal outputs (1) to the temperature control system, (2) to the voltage](/docs-images/85/92709274/images/36-2.jpg "application of the cell, and (3) to the motors.")



36 30 Figure 3.2: Fourier Transformed image of electroconvection frequency. The output from the card is connected to the National Instrument s BNC terminal, BNC-2090 [24]. The BNC terminal outputs (1) to the temperature control system, (2) to the voltage application of the cell, and (3) to the motors. In this subsection, the voltage applied to the electroconvection cell and the sample system with motors are described. Fig. 3.3 shows the frame work of our electronic system for applying voltage to an electroconvection cell. An output signal from BNC-2090 is connected to the amplifier [25]. The gain of the amplifier is controlled by the written program shared in our lab. The gain is usually adjusted to have 18 V rms to 25 V rms for output voltage. The amplified signal is connected to the Keithley multimeter and to the sample electroconvection cell. Although it is not shown in Fig. 3.3, a high pass filter is added
37 31 Figure 3.3: The overview of voltage control in between the multimeter and the cell in order to avoid having a direct current. Having a direct current causes a permanent pattern in the cell. When a high direct current is applied to the cell, the cell can be destroyed, and very often a permanent chaotic pattern is printed to the cell. For domain coarsening experiments, two motors are added to the electroconvection stage, as shown in Fig The sample stage is connected to the motors [?] by gears and chains. For domain coarsening experiments, it is critical to observe the late time of coarsening, which means a large observed area is necessary. There is a limit to the minimum magnification in our optical system. Currently, for domain coarsening experiments, our system size is comparable to other experimental works and simulations. However, a question of a finite size effect still remains. Using two
38 32 Figure 3.4: Two motors connected to the sample stage: The stage is controlled to move in both x y direction for domain coarsening experiment motors, one can observe almost the entire view of the convection cell by moving the field of view. This method minimizes our experimental limit to observe the late time coarsening behavior Temperature Control The cell is embedded in an aluminum block in order to be maintained at the constant temperature. The size of aluminium block is 10 cm 10 cm 6 cm. Three calibrated thermistors are inserted inside the aluminum block, and two heaters are attached to the block, Fig The temperature is controlled by the PID, proportional integrated derivative, control. The calibrated thermistors are measured and averaged for every 20 to 30 s depending on the setup for various experiments. The value of proportional coefficient is set from 30 to 70. The value of integrated coefficient is set from 0.3 to 1.0. The derivative part is not usually turned on. The temperature is maintained constant with ± K to ±
39 33 Figure 3.5: The Overview of temperature control. (1) DC power supply (2) Multimpeter (3) PCI GPIB card (4) Thermesters (5) Heaters 3.2 Image Analysis Various image analysis programs are developed for observation of electroconvection. In this section, a main program used to measure the size of domains and the location of dislocations is described. The codes are listed in the appendix. This analysis was developed because of our unique anisotropic system. Dislocations are often locate in a grain boundary between two degenerate states. An analysis program was developed to extract the information about defects from the complex background Detection of Dislocation An analysis program to locate dislocations in the pattern was written using IDL 6.0. The actual code is in appendix for reference. Topological defects are singularity















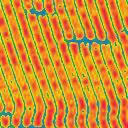
40 points in the system. Therefore, at the location of defects, the phase is undefined. The amplitude of pattern goes to zero at such a point. In our system, defects exist 34 in the background of a periodic pattern. The amplitude also goes to zero when the background periodic pattern has zero amplitude with its wavelength. We use demodulation technique to remove the background stripes in order to separate zero values due to the location of defects to the background striped pattern. First, the image is cleaned using the smooth function in IDL. Smooth function averages the local assigned matrix of pixels. The background image is also smoothed. The Fourier transform is taken of the subtracted image of two. See Fig. 3.6 and Fig Figure 3.6: The sample image: ε = 0.02, f = 8000Hz, T = 30.0 C. The image is taken 800sec after the quench The Fourier image is cleaned by extracting only the primary peaks of the pat-

41 35 Figure 3.7: The Fourier Transformed of the Image: Two peaks in the box represent the primary peak of zig and zag. For demodulation, the extracted peaks are shifted to the y axis tern. Then, the primary peaks are shifted to be on the y axis. This removes the periodicity in the x direction. This technique is called demodulation. The demodulated image in spatial coordinates is recovered by the inverse Fourier transformation. Phase information of the modulated image and magnitude information of the image are obtained. See Fig. 3.9 and Fig Then the threshold value is chosen carefully to separate the values close to zero in the demodulated magnitude image and the values not close to zero. The threshold image is shown in Fig The dark spots represent the candidate spots for dislocations where the amplitude is close to zero. The program searches the phase information at the candidate spots. If there is a ±2π change in the phase difference around the spot, then the candidate spot is regarded















42 36 Figure 3.8: The magnitude image of a demodulate image as a location for a dislocation. The program also distinguishes +2π and 2π phase difference. The resulting image is shown in Fig Black spots are where the pixel values are set to zero and represent a phase difference of 2π when taking the loop clockwise around its location. White spots are where pixel values are set to 255 and represent a phase difference of +2π. The program also finds locations of dislocations for a series of images. As mentioned above, the detection of dislocations is sensitive to both the choices of the size of box for an extraction of primary peaks in the Fourier image and the threshold value for selecting zero amplitude in the demodulated magnitude image. The program adjusts these values dynamically for every image. However, before running the series of images to be processed, the careful selection of an initial box size for the fourier















43 37 Figure 3.9: The phase image of the original image Fig. 3.6 image and an initial value of threshold value is needed for better accuracy.
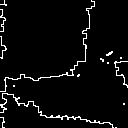
44 Figure 3.10: The threshold binary image: The image is threshold near zero. 38














45 Figure 3.11: The detected defects superimposed on the image Fig. 3.6: The black square represent detected locations for 2π phase change. The white squares represent detected locations of +2π phase change. 39
46 Chapter 4 Domain Coarsening in Modulated Pattern We report on the growth of domains of standing waves in electroconvection in a nematic liquid crystal, focusing on the evolution of domain walls. An ac voltage is applied to the system, forming an initial state that consists of travelling striped patterns with two different orientations, zig and zag rolls. The standing waves are generated by suddenly applying a periodic modulation of the amplitude of the applied voltage that is approximately resonant with the travelling frequency of the pattern. By varying the modulation frequency, we are able to vary the steady-state, average wavenumber. We characterize the evolution of the domain walls as a function of the average background wavenumber by measuring the total area and length of domain walls present in the system as a function of time. We find that as the background wavenumber is varied away from the natural wavenumber for the pattern, the evolution of the domain walls occurs at a faster rate. 40
47 4.1 Introduction 41 Our understanding of the role of the interaction between defects and a periodic background during the ordering of patterned systems after a sudden quench remains limited. Simulations of the growth of striped domains clearly point to the importance of understanding the interaction between defects and the background wavenumber [4, 6, 26, 7]. Yet, experimental studies are limited [27, 10, 8], and there is no general theoretical understanding of the problem. The generic problem of the response of a system to a sufficiently large, sudden change of an external parameter, referred to as a quench, arises in many materials situations, such as magnetic materials, alloys, binary fluids, polymer blends, and liquid crystals [18]. Generally, one is interested in the case where an initially uniform state loses stability after the quench. When there is more than one possibility for the new state (such as spin up or down in a magnetic system), domains form. These domains coarsen, or grow, as a function of time, a process that is often referred to as domain coarsening or phase ordering. The dynamics of phase ordering for the special case of uniform domains is relatively well understood [18]. In general, such domains are characterized by a single length scale, l(t), that grows according to a power-law, l(t) t n. Here n is referred to as the growth exponent. For systems with a non-conserved order parameter, n = 1/2. Systems with a conserved order parameter have n = 1/3. Generally, these exponents can be understood in terms of the topological defects of the relevant order parameter [18]. In contrast, for patterned domains, there is no general explanation of the observed growth exponents, in terms of the topological defects or otherwise. However, specific examples clearly
48 42 point to the importance of the topological defects [10, 4, 6, 26, 7]. One finds that there are two main complications when considering the coarsening of patterned domains: (1) the interaction between the defects and the periodic background; and (2) the additional length scale that is set by the periodicity of the pattern. In this paper, we focus on the issue of the impact of the background wavenumber on the dynamics of topological defects. For systems in which the domains are composed of stripes, theoretical studies of the power-law scaling of the late-time domain growth has focused on simulations and analysis of the Swift-Hohenberg equation [3, 4, 28, 6, 2, 29, 26, 7]. Experiments have been performed in both a thermodynamic system, diblock copolymers [27, 10], and a driven system, electroconvection [8]. In this paper, we will refer to thermodynamic quenches, or systems, as ones where the asymptotic state after the quench is one of thermodynamic equilibrium. Driven systems refer to ones in which the asymptotic state is not an equilibrium state, but it is a steady state of the system. Typically, both the simulations and experiments consider measurements of the structure factor, S(k). An important aspect of such measurements is the fact that the width of the relevant peaks in the structure factor is a measure of both variations in wavenumber and domain size. Therefore, information about the two important lengths scales are mixed in a nontrivial way. Various other measures of the domain growth that do not contain information about the wavenumber have been studied. These include orientational correlation functions for the wavevector field, defect densities, and domain wall lengths. All of these measures probe only the domain size. In both simulations and experiments, the changes in the width of the structure
49 43 factor occur at a significantly slower rate than changes in the other measures. In numerical simulations, growth exponents that are determined from measurements of S(k) are consistent with n = 1/5 [4, 28]. In contrast, measurements based on orientational correlation functions exhibit a model dependence. Simulations of a version of the Swift-Hohenberg model that has a potential are consistent with a growth exponent n = 1/4, but the nonpotential case gives n = 1/2 [4]. The two experimental measures of striped domain growth are consistent with the simulation results for the potential case. The orientational correlation function and defect densities have been measured experimentally in diblock copolymers [27], giving n = 1/4. For electroconvection, it was found that the growth exponent measured using S(k) is consistent with n = 1/5 and measurement of the domain size using total domain wall length gave n = 1/4 [8]. These experiments clarified that the differences in growth exponents between S(k) and other measures could be explained by considering the evolution of the local wavenumber distribution, which is found to dominate the width of S(k) at late times [8]. The issue of the interaction between defects and the background periodicity is apparent in various features of domain growth, as revealed in simulations. First, domain growth is observed to be affected by strong pinning of grain boundaries by the periodic background [6, 2]. Because the pinning strength is related to the amplitude of the pattern, the measured growth exponents can depend on the depth of the quench. A related issue is that the growth exponents are also found to depend on the level of noise in the system [3, 29]. This is attributed to the fact that noise can provide a source of depinning for the defects. Finally, the difference in the average wavenum-
50 44 ber for the potential and nonpotential versions of the Swift-Hohenberg equations has been proposed as one possible explanation of the different scaling exponents for the orientational correlation function [4]. Recent simulations using a different model of stripe formation (the nonlinear phase model) have shown that different classes of defects can lead to different growth exponents [7]. These same simulations suggest that the domain wall width and length evolve with different scaling in time [7], suggesting yet another possible length scale in the problem. In this chapter, we report on a systematic, experimental study of the impact of changes in the average wavenumber on the growth of domains in which we find that the domain growth occurs at a faster rate as the wavenumber is tuned away from the natural wavenumber. This provides a useful test of the proposed explanation, based on the background wavenumber, for different growth rates that are observed in two versions of the Swift-Hohenberg equation [4]. In particular, the growth of domains in the simulation also was faster when the system was not at the natural wavenumber [4]. An important feature of the experiments is that we can tune the wavenumber over a range of values, instead of just the two wavenumbers considered in the simulations [4]. Furthermore, we report on measurements of the behavior of the domain wall length and area that are compared with simulations reported in Ref. [7]. The system we use is electroconvection in the nematic liquid crystal I52 [30, 31]. A nematic liquid crystal is a fluid in which the molecules are aligned on average [14]. The axis along which the average alignment points is referred to as the director. For electroconvection [32], a nematic liquid crystal is placed between two glass plates that have been treated so that the director is everywhere parallel to the
51 45 plates. An ac voltage is applied perpendicular to the plates. Above a critical value of the voltage, a pattern of stripes forms. Because the system is anisotropic (the director selects a preferred axis), the states are usually characterized by the angle between the wavevector of the pattern and the undistorted director, θ. States with the same wavenumber and angle ±θ are degenerate and referred to as zig and zag, respectively. For the system discussed in this paper, the initial pattern consists of four travelling stripe states [33]: right- and left-travelling zig and zag rolls. It has been established for this system that above a critical value for a modulation of the applied voltage at twice the travelling frequency, the system consists of either standing zig or zag rolls [31]. Therefore, a sudden quench of the system from below this critical value to above it results in the nucleation of domains of standing zig and zag rolls, which proceed to coarsen. The dominant topological defects in the system are domain walls between the domains of zig and zag rolls. We will focus on the evolution of these domain walls. As discussed above, measurements of growth exponents for this system have focused on quenches that used exactly twice the travelling frequency. This results in domains with the natural wavenumber for the pattern. Reference [8] reports a value of n = 1/4 for the growth of the domain size, based on measurements of the domain wall dynamics, and n = 1/5 for the scaling of S(k). A single initial experiment for a modulation frequency slightly different from twice the travelling frequency suggested similar behavior. However, a systematic exploration of changes in the wavenumber, by varying the modulation frequency, is possible for this system [31], and was not carried out at the time. In this paper, we report on such a study. The rest of the paper is organized as follows. Section II provides the details of the experimental sys-
52 tem and the techniques used to analyze the domain growth. Section III presents the results of the experiment. Section IV provides a discussion of the results Experimental Details We used the liquid crystal I52 [34] doped with iodine. Due to the nature of I52, 8% iodine by weight was used initially. However, a significant fraction of the iodine evaporates before the cells are filled, so the final concentration is not well controlled. We used commercial liquid crystal cells [35] composed of two transparent glass plates coated with a transparent conductor, indium-tin oxide. The cells were 2.54 cm x 2.54 cm, with the conductor forming a square 1 cm x 1 cm in the center of the cell. The glass was also treated with a rubbed polymer to obtain uniform planar alignment of the director. We define the direction parallel to the undistorted director to be the x axis and the direction perpendicular to the undistorted director to be the y axis. The apparatus is described in detail in Ref. [36]. It consists of an aluminum block with glass windows. The temperature of the block was kept constant to ±0.001 C. Polarized light is applied from the bottom of the cell. Above the cell, there is a ccd camera to capture the image of patterns using the standard shadowgraph technique [20]. We apply an ac voltage of the form V (t) = 2[V o + V m cos(ω m t)]cos(ω d t) perpendicular to the glass plates. Here V o is the amplitude of the applied voltage in the absence of modulation, V m is the modulation amplitude, ω m is the modulation frequency, and ω d is the driving frequency. For all of the experiments reported on
53 47 here, ω d /2π = 25 Hz. The critical voltage, V c is defined as the value of V o for which the system makes a transition from a uniform state to the superposition of travelling rolls in the absence of modulation. For the studies reported on here, V c = 16.6 V. There are two relevant control parameters: ɛ = (V o /V c ) 2 1 and b = V m /V c. For the experiments discussed here, the system is initially at ɛ = 0.04 and b = 0, i.e. above onset with no modulation. This corresponds to V o = 17.0 V. As mentioned in Sec. I, there are only four modes needed to describe the observed convection rolls: zig and zag, right and left travelling oblique rolls. This state is an example of spatiotemporal chaos in that the amplitude of the four modes varies irregularly in space and time [37]. For each ɛ and ω m, there exists a critical value of b, b c, above which the system consists of standing zig and zag rolls. A quench corresponds to a sudden change of b to some value b > b c. At and below V c, the modulation frequency with the strongest coupling to the pattern, and correspondingly smallest value of b c, is twice the Hopf frequency, ω h. The Hopf frequency is the travelling wave frequency at V c. As one increases ɛ, the natural frequency of the pattern shifts. Because we worked at a finite value of ɛ, the smallest value of b c occurs for a modulation frequency, ω m = 2ω, where ω is the natural frequency of the pattern at the given value of ɛ. Because it is the relative shift in frequency that matters, we will consider the behavior as a function of δf = f f m /2, where f = ω /2π and f m = ω m /2π. For all experiments considered here, the natural frequency was f = 0.26 ± 0.01 Hz. Fig. 4.1 is a plot of b c as a function of δf for ɛ = We focus almost exclusively on the negative values of δf because for δf > Hz, the pattern stabilized by modulation is standing waves that are a superposition of zig and zag rolls, and not
54 b (f* - f m /2) Hz Figure 4.1: Onset value for standing waves b c at a value of ɛ = 0.04 as a function of δf = f f m /2. Here f is the natural travel frequency of the pattern at ɛ = 0.04 and f m is the modulation frequency. The parameter bc is the critical value of b = V m V c. Here V m is the modulation voltage and V c = 16.6V is the critical voltage for the onset of a pattern in the absence of any modulation. The solid line is a fit to the data used to determine f = 0.26 ± 0.01Hz. individual domains of standing zig and zag rolls. Quenches were performed for a range of δf. The final value of b in each case was selected so that the quench depths all corresponded to b = 0.02, as measured from the onset of standing waves (solid curve in Fig. 4.1). The camera was triggered to take the images at the same point in the modulation cycle. This ensured that the pattern was imaged at the same point in the standing wave cycle. Each image covered a region of 4.1 mm 3.1 mm of the cell. Time is scaled by the director relaxation time, τ d γ 1 d 2 /(π 2 K 11 ) = 0.2 s. Here γ 1 is a rotational viscosity; K 11 is the splay
 and (b) are with a modulation frequency δf = 0.")
 and (d) are with a modulation frequency δf = 0.")


55 49 elastic constant; and d is the thickness of the cell. Figure 4.2: Four images of domain growth. Images (a) and (b) are with a modulation frequency δf = Hz, at t = 96 s and t = 600 s after the quench, respectively. Images (c) and (d) are with a modulation frequency δf = Hz, at t = 112 s and t = 700 s after the quench, respectively. The solid bar in (a) is 0.2 mm. An example of a small region of the pattern after a quench is given in Fig Two different quenches are illustrated: δf = Hz and δf = Hz. The images illustrate the type of patterns on which we focused: standing zig and zag rolls separated by domain walls. The domain walls clearly consist of the superposition of zig and zag rolls. For significantly larger values of δf, there is qualitatively different




























56 50 behavior. Regions of superposition that are domains in their own right appear. Further increasing δf results in patterns that are entirely the superposition of zig and zag rolls, as existed for δf > 0.01 Hz. Though interesting, in these patterns the defects are no longer domain walls, but localized defects. Future work will consider in more detail this other class of patterns. In order to quantify the domain wall dynamics, we converted the images to a scaled image of zig and zag domains, referred to as the angle map. This was done using the procedure detailed in Ref. [8]. Briefly, the local angle of the wavenumber is computed
57 51 using the algorithm reported in Ref. [38]. This is used to produce an image with black and white domains representing regions of zig and zag, respectively. Regions of superposition of zig and zag rolls (the domain walls) are represented by gray. FigureFig. 4.3 illustrates a typical image (Fig. 4.3a) and the results after conversion to an angle map (Fig. 4.3b). Two measures of domain-wall size are used. First, the normalized area of the domain wall, A, is considered. This quantity is proportional to the energy associated with the domain wall. A is defined as the total number of gray pixels in the angle map divided by the total area of the viewing image. The area of the domain wall will scale as A wl/l 2 = w/l, where w is the width of the domain wall and l is a typical length scale for a domain. For a constant domain wall length, this quantity scales as the inverse of a characteristic domain size. If the domain wall width scales differently than the typical domain size, a direct measure of the domain wall length allows one to extract the scaling of the domain wall width [7]. In order to directly measure the domain wall width, we converted the angle map image to an image of the domain boundaries. An example of the result is shown in Fig. 4.3c. This was a two step process. First, we reprocessed the angle map images so all the boundary pixels were associated with either a zig or zag domain, producing a black and white image. Then, a standard edge detection filter from the IMAQ ImageAnalysis package [39] was used to find the boundaries between the domains. These boundaries are a single pixel wide, so the total number of boundary pixels gives the length of the domain wall. We tested a number of different algorithms for associating boundary pixels with a zig or zag domain, including either associating
58 52 all the boundary pixels with zig domains or all the pixels with zag domains. The details for associating a boundary pixel with a domain did not significantly change the determination of the domain wall length. We considered the total domain wall length per viewing area L. For this measure, L l/l 2 = l 1. By comparing A and L, we are able to obtain information about w. The power spectrum, S(k), of each image was computed. This was used to determine the average wavenumber (< k > ks(k)dk/ S(k)dk) for the zig and zag rolls. In addition, we considered two other measures of the domain growth in order to make contact with previous measurements. The widths of the fundamental peak in S(k) in both the x (σ x ) and y (σ y ) directions were determined using the second moment of S(k). This gives σ x < kx 2 > < k x > 2, with < kx 2 > kxs(k)dk/ 2 S(k)dk, and a similar definition for σ y. (Note: all of the integrals were taken as sums over a finite region around the fundamental peak, as described in Ref. [8].) σ x and σ y contain information about the typical size of a domain and the distribution of wavenumbers, in the respective directions. We also considered the width of the power spectrum of the angle map image, S(q). We use q to distinguish between the power spectrum of the angle map case and the power spectrum of the pattern itself. In this case, the peak is centered at q = 0, as the angle map domains are uniform. Therefore, the width of the peak is related to the typical domain size only. Again, we separately considered the width in the x direction (w x ) and y direction (w y ), where the widths are defined in the same manner as for S(k).
59 4.3 Results 53 (a) (b) Figure 4.4: (a) Average wavenumber (normalized by the critical wavenumber) for the zig standing rolls as a function of time after the quench. Time is scaled by the director relaxation time, τ d. The symbols are as follows: ( )δf = 0.008Hz, (o) δf = 0.012Hz, ( )δf = 0.022Hz, and ( )δf = 0.072Hz. The wavenumber for the zag rolls shows similar behavior. (b) An expanded view of the average wavenumber for δf = 0.008Hz. The solid line is a guide to the eye illustrating the regime where the evolution of < k > is consistent with logarithmic growth in time. Fig. 4.4 shows the time evolution of the average wavenumber (normalized by the critical wavenumber k c = 0.17 µm 1 ) (< k > /k c ) for the different quenches of interest. A number of features of the evolution are evident. First, as claimed, the latetime value of the < k > is dependent on δf (see Fig. 4.4a). However, the wavenumber never reaches a constant value. For all quenches, the evolution after t/τ d 1000 is consistent with a very slow logarithmic growth: < k > /k c = a log 10 (t/τ d ) + b, with a This is illustrated in Fig. 4.4b. There is a weak dependence on when the logarithmic growth begins (with values ranging from 2.7 < log 10 (t/τ d ) < 3.1) and on
60 54 the coefficient (a) of the logarithmic growth (with values ranging from to 0.02). In general, for larger δf, evolution consistent with logarithmic time dependence occurs at a later time. Figure 4.5: Width of the power spectrum as a function of time for two different values of δf. Time is scaled by the director relaxation time τ d. (a) δf = 0.008Hz (b) δf = 0.072Hz. In both cases, the open symbols are for the power spectrum computed on the image with the stripes, with σ x given by the squares and σ y given by the circles. The closed symbols are for the power spectrum of the image of the angle map, with w x given by the squares and w y given by the circles. Fig. 4.5 shows the evolution of the width of the power spectrum for both the pattern (σ x and σ y ) and the angle map (w x and w y ) for two values of δf. There are a number of features that become apparent in these plots. First, initially the widths of peaks derived from the pattern and the angle map are on the same order of magnitude, within a factor of 2 or 3. This is a reflection of the fact that the initial
61 domain sizes are on the same order as the variation in local wavenumber. Though as expected, σ x and σ y are larger than w x and w y. As the pattern evolves, the width 55 of the peaks derived from the angle map become smaller. Ultimately, the widths based on the angle map reflect the fact that only a few domains are present in the image. In contrast, the widths of the peaks based on images of the pattern do not change nearly as much. This reflects the slow changes in the variation of the local wavenumber that come to dominate S(k) at late times. This difference is consistent with earlier results comparing S(k), which includes information about the variation in local wavenumber, to more direct measures of the domain size [4, 8]. One can quantify the different rates of change of the two measures in Fig. 4.5 by fitting the data to a power-law, σ t n or w t n, and determining the growth exponent n. One finds that growth exponents based S(k) are smaller than those based on S(q). For late times, assuming σ t n, the exponents n are on the order of 0.1. In contrast, for w x and w y, one obtains growth exponents of n = 0.2 or larger. One can see in Fig. 4.5, that the evolution of S(q) is faster for δf = than it is for δf = 0.008, and this is reflected in a roughly doubling of the value of n. One can also use these exponents to test for strong anisotropy in the growth. The examples in Fig. 4.5 illustrate the fact that w x and w y have different magnitudes initially, but similar time dependence. This suggests that even though the domains are initially anisotropic, the degree of anisotropy is relatively constant in time. This is apparent in the spatial images where one does not observe long, skinny domains at later times, as would happen if the growth itself was highly anisotropic. Similar behavior is observed for σ x and σ y. This result justifies our assumption of a single
62 56 length scale (l(t)) associated with the domain size that is used for analyzing the domain wall properties. As noted above, there are only a few domains present in the image at late times. Therefore, the measures of the domain size based on the widths of the peaks in S(k) and S(q) are limited by finite size effects and limited resolution. Because of these potential sources of error, the exponents are not being quoted as proof of a scaling regime. They are provided simply as a quantitative measure of the obvious differences in temporal evolution evident in Fig A better measure of the rate of domain growth is obtained by our measurements of the domain wall dynamics directly. For these measures, there is sufficient total domain wall length present in the system that we can reliably measure the rate of change of the domain wall length during the time we monitored the growth. The results for the direct measurements of the domain wall dynamics are summarized in Fig Fig. 4.6(a) shows the evolution of the total domain wall length (L) for a number of values of δf that span the range of values that we studied. Fig. 4.6(b) shows the evolution of the total domain area (A) for the same values of δf. In both cases, there is an obvious change in the time evolution as one changes δf. However, another weak effect is also apparent at early times: there is initially more domain wall present for larger values of δf, suggesting smaller domains. This is not the focus of this work, but it is worth a brief comment. The fact that a larger shift in frequency produces smaller initial domains makes qualitative sense. The nucleation of domains corresponds to the stabilization of standing wave patterns from an existing irregular state [31]. In the irregular state,
63 57 Figure 4.6: (a) Total normalized domain wall length (L) as a function of time. Time is scaled by the director relaxation time, τ d. The symbols are as follows: ( )δf = 0.008Hz, ( )δf = 0.022Hz, and ( )δf = 0.072Hz. (b) Total normalized domain wall area (A) as a function of time. Time is scaled by the director relaxation time, τ d. The symbols are as follows: ( )δf = 0.008Hz, ( )δf = 0.022Hz, and ( )δf = 0.072Hz. there is a characteristic domain size and wavelength. Domains with the natural wavelength dominate, though a range of wavelengths are present. Therefore, this is not a classic nucleation from a perfectly uniform phase. As one changes the modulation frequency, regions with a wavenumber that matches the selected wavenumber will stabilize relatively quickly. As the shift in modulation frequency relative to the natural frequency increases, a smaller fraction of the pattern will have the correct wavenumber. Therefore, the initial size of the stabilized domains will be smaller. As with the power spectra, we will use fits to power-law growth to characterize
64 58 the dynamics illustrated in Fig Unlike the power spectra, the measures of the domain walls are not impacted by finite size effects during the time for which we studied the system. This is due to the fact that even though only a few domains are present in the system, there is still a significant amount of domain wall. However, one still needs to be careful when interpreting these results. In studies of domain coarsening, it is standard to assume that a late-time scaling regime exists in which the lengths characterizing the domain size grow as a power-law in time. One experimental difficulty with this assumption is determining when such a scaling regime is reached. This is especially true in the studies reported on here, where the average wavenumber is still evolving in time for all of the conditions that we studied (even if it is only logarithmic in time). Therefore, our focus is not on whether or not a true scaling regime has been reached. Instead, because the data is consistent with a power-law of the form L(t) t n and A(t) t n, we can use the values of n to compare the dynamics of the domain walls under different circumstances. Any claims of a true scaling regime would be premature at this point, though the consistency of the data with power-law behavior suggests that it is possible such a regime has been reached. Fig. 4.7 summarizes the results for the measured growth exponents n for both L and A. One observes that the evolution of the domains is significantly faster for larger δf, with n ranging from approximately 0.25 to 0.6. One also sees that the exponents for A and L are slightly different. The difference suggests an extremely slow decrease of the width in time, with w t n and n = 0.04 ± By directly comparing A and L one finds that the change in the width is only 0.2 pixels. This is consistent with the observation based on the images that the domain wall width
65 n (f* - f m /2) (Hz) Figure 4.7: Summary of measured scaling exponents (n) for both L (solid squares), and A (open circles). is essentially constant during the evolution. It should be noted that the evolution of the domain wall width reported in Ref. [7] was also slow. However, in the simulations the domain wall width grew in time, and we observe that, if anything, it shrinks in time. 4.4 Summary The experiments reported in this chapter demonstrate the close connection between the dynamics of domain walls in patterned systems and the evolution of the background wavenumber after a sudden change in the external parameters. We performed
66 60 a series of quenches in which the steady-state average wavenumber after the quench is varied. The resulting evolution of the domain walls depends on the steady-state value of < k >. The rate of evolution for both the total domain wall area and length increase as the wavenumber is varied away from its natural value. Assuming A and L follow power-law scaling in time, exponents in the range of 0.25 to 0.6 are observed. As discussed in the introduction, such a large variation in growth exponent is consistent with simulations of two different Swift-Hohenberg equations [4]. In Ref. [4], the calculated exponent is found to increase from 0.25 to 0.5 with a variation in wavenumber of approximately 20%. This difference in average wavenumber was suggested as the source of the different exponents. Though the agreement between our measurements and Ref. [4] is suggestive, it should be kept in mind that the simulations in Ref. [4] are for the isotropic Swift-Hohenberg equation and our system is anisotropic. Along these lines, it is interesting to compare the slow variation in the width of the domain walls that we observed to the changes reported in Ref. [7]. Though opposite in sign, similar slow changes were observed in the simulations of an isotropic system [7]. These similarities between our results and simulations of isotropic systems may be due to the fact that the growth itself is relatively isotropic, as indicated by the evolution of the power spectrum parallel and perpendicular to the director (see Fig. 4.5). At a minimum, the agreement between our results and simulations suggests that further work is needed to fully understand the impact of wavenumber variation on domain growth in patterned systems. Finally, our results suggest that small modifications in the wavenumber of a pattern away from the natural wavenumber of the system can have a significant impact
67 61 on the rate of growth of domains in the system. In our case, the maximum variation in wavenumber was only 6%, but the exponent changed from 0.25 to 0.6. If these results carry over to other patterned systems, such as diblock copolymers, one can have a relatively significant impact on the rate of growth of domains in systems where this has a practical impact on various processing applications [4, 28].
68 Chapter 5 Study of Dislocation in Anisotropic system Preliminary study of dislocations dynamics confined to grain boundaries in a striped system are reported in this chapter. In electroconvection, a striped pattern of convection rolls forms for sufficiently high driving voltages. We consider the case of a rapid change in the voltage that takes the system from a uniform state to a state consisting of striped domains with two different wavevectors. The domains are separated by domain walls along one axis and a grain boundary of dislocations in the perpendicular direction. The pattern evolves through dislocation motion parallel to the domain walls. We report on features of the dislocation dynamics. The kinetics of the domain motion are quantified using three measures: dislocation density, average domain wall length, and the total domain wall length per area. All three quantities exhibit behavior consistent with power law evolution in time, with the defect density decaying as t 1/3, the average domain wall length growing as t 1/3, and the total do- 62
69 main wall length decaying as t 1/5. The two different exponents are indicative of the anisotropic growth of domains in the system Introduction The dynamics of topological defects are observed to dominate the temporal evolution of patterns in many physical systems. However, our understanding of the quantitative contribution of the defect dynamics to the evolution of patterns is still not complete. One area in which topological defects potentially play a central role is the growth of domains in a patterned system after a sudden change in the external parameters. For many striped systems, such as diblock copolymers and convection in fluids, many of the topological defects (such as disclinations and domain walls) are the same as those that exist in classic models for the growth of uniform domains, such as Ising models or x-y models [15]. For uniform systems, the contribution of the topological defects to the time evolution of the domains is relatively well understood [1]; whereas, this is not the case for striped systems. It is useful to briefly review the situation for uniform domain growth [1]. One is generally interested in the evolution of a system after a rapid change of an external parameter, or a quench. Typically, one considers an initially uniform state that immediately after the quench is no longer an equilibrium or steady-state phase of the system. The new equilibrium phase is degenerate, and domains of the different states form. For example, in an Ising system, one would have domains of up and down spins. During the subsequent evolution of the system, or coarsening, the domains
70 64 are characterized by a single length scale. This length grows as a power of time, t n, where n is the growth exponent. We use the designation uniform domains to refer to systems in which within a domain, the system is uniform. Examples of this type of system include magnetic systems, metallic alloys, binary fluids, and nematic liquid crystals [1]. One of the main goals of this field is to understand the possible values of n and other features of the late time scaling. For uniform systems, much of the late-time behavior can be understood in terms of the topological defects of the order parameter [1]. For most cases, the growth exponent is 1/3 if the order parameter is conserved, such as in binary fluids, and the exponent is 1/2 if it is not conserved, as in magnetic systems [1]. Various interesting alternate cases exist, especially for the x-y model in one and two dimensions [1]. In contrast, no similar general framework exists for patterned domains. These are systems in which within a domain, the system exhibits a pattern, such as stripes. Stripes, or more generally patterns, occur in a wide range of systems [15, 40], including convecting fluids, animal coats, polymer melts, and ferromagnets. Stripes occur both as an equilibrium state of the system, such as in diblock copolymers, and as a result of external driving, as in convection in fluids. A sudden change of an external parameter, a quench, can bring the system from a spatially uniform state to a striped state that undergoes coarsening, or phase ordering. The coarsening of striped domains has focused on isotropic systems [3, 4, 28, 27, 6, 10], with a significant fraction of the work focusing on simulations of model equations, such as the Swift-Hohenberg equation [3, 4, 28, 6, 41]. Experimental work has been limited to two systems, one isotropic (diblock copolymers [27, 10]) and one anisotropic (elec-
71 65 troconvection in nematic liquid crystals [8, 42]). For isotropic systems, the stripes can have any orientation. In this case, the dominant defects are disclinations and domain walls, though dislocations are observed as well. For diblock copolymers, the measured growth exponent is consistent with n = 1/4. Detailed studies of the disclination dynamics are able to explain this measured exponent [27, 10]. For simulations of isotropic systems, growth exponents are usually consistent with 1/4 [3, 4, 28] or 1/5 [3, 4, 28, 8]. Factors affecting the measured exponent include external noise and the quantity used to characterize the domains. There is evidence that for small enough quench depths the growth exponent is 1/3 [6, 2, 41]. An open question is the connection between the simulations and the experiments with the diblock copolymer systems. The dominant defects appear to be different between the simulations and the experiment, leaving open the question of a general explanation for the coarsening behavior. For electroconvection (an anisotropic system), two main classes of patterns occur as the initial transition: normal and oblique rolls [43, 32, 44]. Electroconvection uses a nematic liquid crystal. The molecules of a liquid crystal align on average along a particular axis, referred to as the director [14]. Normal rolls consist of a system of parallel rolls oriented with the wavevector parallel to the director field (the average axis of alignment for the molecules). The main defect in the normal roll regime is isolated dislocations. The dynamics of these dislocations have been studied both experimentally and theoretically [45, 46, 47, 48], though not in the context of domain growth. Oblique rolls correspond to stripes in which the wavevector forms a nonzero angle with respect to the undistorted director field. In the oblique roll regime, a
72 66 quench typically produces a pattern consisting of domains of stripes with only two orientations, referred to as zig and zag rolls. In this case, the main defects are domain walls and dislocations. For a particular case of electroconvection, growth exponents of 1/4 were observed [8]. However, in contrast to isotropic systems, disclinations were not present in this system. Again, this points to the need to better understand the dynamics of the various classes of defects if a general framework for understanding phase ordering in pattern forming systems is to emerge. In considering the existing work, there are at least two obvious questions. Given that the uniform and pattern forming systems exhibit similar topological defects, why are the resulting growth exponents so different? Given the range of growth exponents observed for pattern forming systems, can they even be explained in terms of the dynamics of topological defects? An important step in answering both of these question is the elucidation of the defect dynamics. The work with diblock copolymers has already made important contributions along these lines for disclinations. In this paper, we focus on the dynamics of confined dislocations found in the oblique roll regime of electroconvection [48]. Fig. 5.1b is a top view of a pattern in an electroconvection cell that illustrates the defects of interest in this paper. The cell consists of a nematic liquid crystal confined between specially treated glass plates that align the director parallel to the plates along a single axis. This axis is defined to be the x-axis, or horizontal direction. The y-axis, or vertical direction, is also parallel to the glass plates, but perpendicular to the undistorted director. The z-axis is taken perpendicular to the plates. The nematic liquid crystal is doped with ionic impurities. An ac voltage is applied perpendicular to
73 67 Figure 5.1: (a) A schematic drawing illustrating a transition from a zig to a zag and back to a zig region of the system. The black lines represent lines of constant phase between the stripes. There are two horizontal domain walls, one at each transition. Also, one example of each type of step dislocation is shown. The Burgers vector is also illustrated for one of the dislocations. The length of a horizontal domain wall is indicated by L i. (b) A close up of a section of the system that shows two step dislocations (black squares). The white squares are provided as an aid in counting the zig and zag rolls. One finds that there are two more zig rolls than zag, as expected with two dislocations. The dashed line highlights one of the horizontal domain walls. The scale bar represents 0.15 mm. the plates. There exists a critical value of the applied voltage, V c, at which a transition from a spatially uniform state to a striped state occurs. The striped state consists of convection rolls with a corresponding periodic variation of the director and charge density. As shown in Fig. 5.1, we studied the case of oblique rolls, and the two classes of topological defects are domain walls and dislocations. The dislocations are special in that they are mostly confined to vertical domain walls. Disclinations do not occur, as the stripes are not easily curved. As we will show, the domain walls are essentially static, so only the dynamics of the dislocations are of interest. In this paper, we
74 68 report on qualitative features of the dislocation dynamics and their interactions. In addition, we will report on the time dependance of three global measures of defect kinetics: dislocation density, average domain wall length, and the total domain wall length per area. The rest of the paper is organized as follows. Section II describes the experimental details. Section III presents the results, and Sec. IV is a summary and discussion of the results. 5.2 Experimental Details The details of the experimental apparatus are described in Ref. [49] and Ch.??. The nematic liquid crystal N4 was doped with 0.1 wt% of tetra n-butylammonium bromide [(C 4 H 9 )4NBr]. Commercial cells [35] with a quoted thickness of 23 µm and 1 cm 2 electrodes were used, giving an aspect ratio of 435. The average wavelength of the rolls was 51 µm. The sample temperature was maintained at 30.0±0.002 C. The patterns were observed from above using a modified shadowgraph setup [20, 50, 49] that emphasized the contrast between zig and zag rolls. The magnification was chosen to monitor the largest possible area of the sample while maintaining enough resolution to resolve the stripe pattern. The area imaged contained approximately 150 rolls. All of the results reported here are for a fixed quench depth of ɛ = V 2 /V 2 c 1 = After a quench, domains of zig and zag rolls form within 60 seconds. (The relevant relaxation times for electroconvection are the director relaxation time (0.6 s) and the charge relaxation time ( s).) The domains are separated by two classes of grain boundaries. There are domain walls that extend horizontally. Across
75 69 these grain boundaries, the phase of the stripes is continuous. The vertical grain boundaries consist of discrete steps that are formed by dislocations. Each step contains either an extra zig or zag roll. Both of the grain boundaries are illustrated in Fig. 5.1, schematically in Fig. 5.1a and using an actual image of the system in Fig. 5.1b. Fig. 5.1a illustrates the Burgers vector construction for one of the dislocations, demonstrating the extra 2π of phase that occurs when traversing a closed path around the dislocation core. Vertical boundaries on opposite sides of a domain are always composed of dislocations of opposite sign. Also shown is the definition of the domain wall length, L i, used later in the analysis of coarsening. The dislocation number density, ρ(t) = n(t)/a, was measured by counting the number of dislocations (n(t)) in a fixed viewing area A. Because of the resolution used to take the images, and the fact that the defects were in such close proximity to each other within the domain walls, the defects were counted by hand. At each time, ρ(t) was averaged over ten different quenches. For the same times, we measured the length of the individual horizontal domain walls in the system, L i (see Fig. 5.1a). From this, we computed both the average horizontal wall length (< L >= 1 Li, N where N is the number of horizontal walls) and the total domain wall length per area (L = 1 Li ). Both of these quantities were averaged over seven quenches. A The results are plotted in Fig Here time is scaled by the director relaxation time, τ d = 0.6 s [43]. In order to avoid issues of the initial growth of the amplitude and wavenumber, we only considered times greater than 400τ d. After this time, the average wavenumber changed by less than 0.3%.
76 5.3 Results 70 The first obvious difference between this system and previous experiments [27, 8] is the dramatic anisotropy of the growth. The dislocations in the vertical grain boundaries move essentially horizontally. Some discrete steps in the vertical direction are observed. This is very different from the usual glide or climb of a dislocations. This is best seen in a movie of the motion. An archived movie made from snapshots taken every 60 seconds and with a playback rate of 0.3 s/frame can be found at Ref. [?]. This horizontal motion is directly responsible for changes in the horizontal length scale of the domains. In contrast to the dislocations, the horizontal grain boundaries are effectively stationary. Any vertical motion of domain boundaries occurs when an individual horizontal grain boundary is eliminated. This elimination occurs when the oppositely charged dislocations that form the domain wall s endpoints(see Fig. 5.1) annihilate. If only a single pair of endpoints annihilate, one has a discrete change of the vertical length by 49 microns. This step size is set by the step height corresponding to one dislocation in a vertically orientated domain wall. In order to eliminate a domain completely, the entire set of oppositely changed dislocations that form the vertical walls must annihilate each other. This is illustrated by the series of snapshots in Fig. 5.2 taken from the archived movie [?]. In this case, the number of dislocations on each side of the domain differ by one. After the elimination of the domain, a single dislocation remains. Many domains contained equal numbers of dislocations, producing no isolated dislocations.
77 71 Figure 5.2: Four images separated by 60 seconds illustrating the collapse of a zig domain. The scale bar represents 0.15 mm. There are a small number of isolated dislocations, as seen in Fig These dislocations move through the sample either by climbing or gliding. Isolated dislocation either eventually move into a domain wall or annihilate with an oppositely charged dislocation in a domain wall. Fig. 5.3 is a series of snapshots taken from the archived movie [?] that illustrate the incorporation of an isolated dislocation into a domain wall. This is consistent with the behavior of isolated dislocation predicted in Ref. [48]. They rarely annihilate with other isolated dislocation because of their extremely low density. During the evolution process, the dislocations often exhibit behavior substantially
78 72 Figure 5.3: Images separated by 150 seconds illustrating the in- corporation of an isolated dislocation into a domain wall. The scale bar represents 0.15 mm. more complex than that shown in Fig For example, Fig. 5.4a-d illustrates a case in which a single dislocation in a domain wall is observed to be undergoing oscillatory motion. Eventually, this defect is close enough to an oppositely charged defect that it accelerates toward that defect and is annihilated (Fig. 5.4e - h). Fig. 5.5 illustrates another interesting behavior. (This event is can also be found in the archived movie [?].) Entire walls of oppositely charged defects can approach within some distance, and then move apart. In a simple picture, oppositely charged defects would attract each other and such a bounce would not be possible. However, these defects are not isolated, and one must account for the entire field of defects to describe these more
79 73 Figure 5.4: Eight images separated by 300 seconds illustrating the motion of a single dislocation highlighted by a circle in (a). A dust particle on the surface of the sample is not removed to provide a frame of reference. In (a) - (d), the dislocation oscillates. In (e) - (h), the dislocation is attracted to one of opposite sign and annihilated. The scale bar represents 0.15 mm. complicated motions. This is outside the scope of this paper and will be the subject of future work. One also observes initially coherent walls of dislocations undergoing dispersion as they move (Fig. 5.6). This separation of dislocations occurs because the details of the interactions result in dislocations within a wall moving with different speeds. Finally, an extremely rare event is the nucleation of a new zig or zag domain.
80 74 Figure 5.5: Images separated by 150 seconds illustrating oppositely charge dislocations moving together,, and ultimately attracting each other. One can also observe the spread of dislocations in a vertical wall that is highlighted in Fig. 6. The scale bar represents 0.15 mm. What is interesting is that extremely thin domains are possible in which the horizontal walls are slightly curved and the ends to contain dislocations (see Fig. 5.7). Given the complex nature of the dislocation dynamics, for the purposes of this study, quantitative measures focused on the time dependence of global quantities. The three quantities of interest are the dislocation density, the domain wall density, and the total domain wall length. The time dependence of these quantities is able to provide information about the rate of ordering along the axes parallel and perpendicular to the director. The results are summarized in Fig. 5.8.










81 75 Figure 5.6: Images separated by 300 seconds illustrating dislocations in a domain wall spreading out in time. The scale bar represents 0.15 mm. One observes that all of the quantities are consistent with power-law growth after t 1000τ d. Fits of the data in this regime give: ρ t 0.32±0.02 ; L t 0.18±0.07 ; and < L > t 0.33±0.02. With the limited range that we are able to observe, it is difficult to show conclusively that a scaling regime has been reached. However, two conclusions are clear: (a) the growth is anisotropic and is best described by at least two different exponents; and (b) the exponents are different from previously studied striped systems [27, 8]. The first point is illustrated in Fig. 5.8c, where the dashed
82 76 Figure 5.7: Images separated by 150 seconds illustrating the nucleation of narrow domain without a dislocation pair. The scale bar represents 0.15 mm. line has a slope of 1/3. The second point is illustrated by the dashed curves in Fig. 5.8a and b. Here, the dashed curves represent the previously observed growth exponent of 1/4. Given that the defect motion is essentially confined to the horizontal (or x) direction, we tested for the existence of two different growth exponents. Typically, for domain growth, the scaling hypothesis assumes all lengths are scaled by a single scale factor R(t) t n, and area scales as R 2. For our system, because of the obvious anisotropy, we assume that horizontal lengths and vertical lengths of domains are
83 77 log 10 ( ) log 10 (<L>) log 10 (L) (a) (b) (c) log 10 (t/ d ) Figure 5.8: (a) Plot of log(ρ) versus log(t). Symbols are experimental data. The solid line has a slope For comparison, the dashed line has a slope of (b) Plot of log(< L >) versus log(t). Symbols are experimental data. The solid line has a slope For comparison, the dashed line has a slope of (c) Plot of log(l) versus log(t). Symbols are experimental data. The solid straight line has slope of For comparison, the dashed line in (c) has a slope of scaled independently by scale factors L x t nx and L y t ny, respectively. Therefore, the number of domains, c, in our fixed viewing area A scales as c A/(L x L y ). Be-
84 78 cause the dislocations are confined in vertical walls, the number of defects is given by the number of domains times a typical vertical dimension of the domain: n(t) cl y. This gives ρ(t) = n(t)/a L y /(L x L y ) t n x. The average horizontal domain wall length (< L >) scales as < L > L x t n x. As with the number of defects, the total horizontal domain wall length scales as cl x. Therefore, the total domain wall length per viewing area will scale as L cl x /A = L x /(L x L y ) t n y. The results in Fig. 5.8 are consistent with two growth exponents, n x = 1/3 and n y = 1/5, with the growth in the vertical direction being substantially slower than the growth in the horizontal direction. Here, the time dependence of ρ(t) and < L > provide independent measures of n x. Another issue is the impact of the finite viewing window, which determines the maximum time for which we can view the system. This is seen in Fig. 5.8c, where the possible scaling of L(t) breaks down for t > 5000τ d, even though the other measures still exhibit possible scaling. This is understandable because this is the time when most horizontal boundaries extend across our field of view, and yet contain significant numbers of step dislocations of opposite sign. Therefore, as these dislocations annihilate with each other, both ρ(t) and < L > continue to evolve, while L(t) remains effectively constant. 5.4 Summary We report observations of the dynamics of an interesting class of dislocations: dislocations confined to vertically oriented domain walls between two degenerate oblique
85 79 rolls. The dislocations exhibit highly non-trivial behavior, forming coherent grain boundaries, exhibiting motion that is neither climb nor glide, and executing interesting dynamics, including oscillations. The motion of isolated dislocations toward the horizontal grain boundaries and the confinement of the dislocations to grain boundaries is expected on general arguments from amplitude equations [48]. However, existing theoretical work focused on the horizontal domain walls and individual dislocations [48]. A more detailed theoretical and experimental study is required to understand the full range of observed behavior. For example, it is clear that the observed dynamics are often due to the interactions of many dislocations. Measures of the global properties of the topological defects provide some insight into the phase ordering of this system. On the one hand, the combination of anisotropy and stripes results in a relatively simple system. There are only two classes of defects (domain walls and dislocations), and their basic motions are straightforward. The dislocations move horizontally, and the domain walls are essentially stationary. This suggests that the phase ordering should be relatively straightforward to understand. On the other hand, the system is an interesting example of how stripes can make the system more complicated than the standard uniform systems. This is best seen by comparing the system to two standard universality classes for phase ordering in uniform systems: Ising and X-Y models. Aspects of the electroconvection patterns are analogous to an Ising system, i.e. a systems of spins with two states. In our system, the two states are the zig and zag rolls, and the horizontal domain walls are the topological defects one would expect in an Ising system. However, the presence of the stripes results in additional topological
86 defects: dislocations. These defects are analogous to vortices in an x-y model, i.e. spins with any orientation in the plane, in that both vortices and dislocations have 80 the same topological charge. In our system, they occur predominantly in vertical domain walls or as steps between two horizontal domain walls. Even with this ambiguity, because there is no obvious conservation law (both zig rolls and zag rolls are eliminated), one expects a growth exponent of 1/2 for both the Ising and X-Y model [1]. The observed growth for electroconvection is clearly slower, being consistent with 1/3 in one direction and 1/5 in the other. This suggests that the confined dislocations represent a new type of coarsening dynamics. One direction that may provide further insight into the exact cause of the slower dynamics is comparisons with simulations of an anisotropic Swift-Hohenberg model [51]. Initial simulations are consistent with a growth exponent of 1/3 for shallow quenches with pinning effects becoming important as a function of quench depth [51]. This will be the subject of future work.
87 Chapter 6 Dislocation/Domain Wall Dynamics with an Influence of Quench Depth The influence of quench depth on the late time of domain coarsening in an anisotropic driven striped system is reported in this chapter. In electroconvection, a striped pattern of convection rolls form for sufficiently high driving voltages. We consider the case of a rapid change in the voltage, a quench that takes the system from a uniform state to a state consisting of striped patterns/domains of two oblique angles: zig and zag. After the quench, domains of zig and zag, and dislocations are formed. For domain coarsening, dislocations annihilate each other. The quench depth, ε = (V/V c ) 2 1, is varied, where V c is the critical voltage for pattern formation. In this chapter, preliminary results of domain coarsening dynamics and dislocation 81
88 82 dynamics with two different values of quench, ε are reported. 6.1 Introduction Coarsening is seen in many systems from molten iron to rock formation. Coarsening occurs when the system experiences a sudden change in external parameter, a quench. When a quench is applied, the phase of the system changes a symmetry. Often, a new phase is an example of a broken symmetry phase with two or more degenerate states. Right after the time of the quench, many defects are nucleated, and small domains of the degenerate states are formed. Then, the system evolves via domain growth. Domain growth is driven by defect annihilation. Extensive work has been done in domain coarsening in uniform systems, for example, ferromagnetic system [17, 18]. However, coarsening dynamics in pattern formation is much less understood. When a quench is applied, the system with a periodic pattern also coarsens by annihilation of defects. However, the defects now are moving in a periodic background. Both numerical work and analytic calculation suggest that this slows down domain growth [6, 2, 41, 12]. This behavior is referred to as a pinning effect. As mentioned in Ch. 5, in electroconvection, two different domain walls are observed: grain boundaries and walls consisting of dislocations. Regular grain boundaries lie in the direction parallel to the director, a local alignment of liquid crystals. Boundaries consisting of dislocations lie in the direction perpendicular to the direction of the director. The study reported in Ch. 5 shows that the dynamics of dislocations contribute to the late time domain coarsening. Dislocations move in a parallel di-
89 83 rection to the director to annihilate with each other. The annihilation of dislocation walls contribute to domain growth dynamics. Using the newly developed image analysis described in Sec , preliminary work studying dislocation dynamics under different values of quench depth is reported in this chapter. Recently, work done by Boyer [12] suggests dislocation dynamics in anisotropic patterns are influenced by quench depth. In this paper, Denis Boyer uses the Swift- Hohenberg equation for oblique stripes in two dimension suggested by Pesch and Kramer [19]. For small quenches, the simulations exhibit coarsening driven by the surface tension. A growth law of t 1/2 is observed using different types of characteristic lengths as measures of the growth. This is similar to Model A dynamics [52]. For large quenches, the evolution of dislocations and regular grain boundaries exhibit different behaviors. The associated growth exponents decreases rapidly as the quench depth is increased. Dislocation densities are observed to remain constant with various quench depths. Compared to regular grain boundaries, dislocations exhibit to lower pinning potentials in the periodic background. In this chapter, a study of numbers of dislocations and the total domain wall length for two different values of quench depths in electroconvection is reported. 6.2 Experimental Details We use the nematic liquid crystal N4 doped with 0.1 wt% of tetra n-butylammonium bromide [(C 4 H 9 )4NBr]. The nematic liquid crystals are confined in the commercial cell [35]. The cell has a dimension of 25 µm thickness and 0.25 cm 2 of area with















90 84 electrodes. The temperature is maintained at 30.0 ± C. The magnification of the image is chosen to be as small as possible for a large view but as large as possible for a better resolution of dislocations. The observed view contains approximately 61 rolls of convection. After the quench, the domains form within 40 s. The director relaxation time, τ d is 7.2 s, and the charge relaxation time is 10 5 s. For electroconvection, the control parameter is defined as ε = (V/V c ) 2 1. The magnitude of the control parameter is a measure of the quench depth in this study. In this chapter, two quench depths, ε = 0.02 and ε = 0.05 are used to study the dislocation dynamics and the domain coarsening. For both quench depths, an applied frequency, f = 8000 Hz is used. For the study of dislocation dynamics, the image analysis technique described in detail in Sec is used. Figure 6.1: The image taken 465 s after a quench, ε = 0.02.














91 85 Figure 6.2: The image with detected dislocations: White squares represent dislocations with a phase difference of 2π by taking the positive loop clockwise. Brown squares represent dislocations with a phase difference of 2π. By using the demodulation technique in Fourier space, the amplitude of the striped pattern is eliminated. Then, the candidates for locating dislocations are obtained by finding the locations where the amplitude of the inverse Fourier demodulated image is close to zero. The phase difference at the candidate location for dislocations is confirmed by using the phase of the original image. clockwise direction around the location of interest. The loop is positive in the Then the phase difference is calculated. If the phase difference is bigger than 2π, the location is counted as a positive dislocation. If the phase difference is less than 2π, the location is counted as a negative dislocation. An image with quench depth, ε = 0.02 is shown in Fig. 6.1, and the same image with the detection of dislocations is shown in Fig. 6.2.





/I(x) taking I(x) to be the")
,(b),(c) and Fig. 6.")
 value of this ratio corresponded")
.")

92 86 Figure 6.3: The image taken 465sec after a quench, ε = Similarly, an image with quench depth, ε = 0.05 is shown in Fig. 6.3, and the same image with the detection of dislocation is shown Fig The number of dislocations is counted using this analysis. For the study of domain coarsening, the same method described in Ch. 4 and [8, 42]is used. The local orientation was determined from the sign of xy I(x)/I(x) taking I(x) to be the patterns of image. As shown in Fig. 6.5(a),(b),(c) and Fig. 6.6(a),(b),(c), regions with a negative (positive) value of this ratio corresponded to zig (zag) rolls and were assigned a gray scale of 0 (255). The resulting image was smoothed, producing an image in which domain walls had a value close to 128. Applying a threshold produced images in which zig regions had a value of 0, domain walls a value of 128, and zag rolls a value of 255. Therefore, the domain wall length








93 87 Figure 6.4: The image with detected dislocations: White squares represent the detected dislocations with phase difference of 2π and brown squares represent the detected dislocations with phase difference of 2π. is the total number of pixel values with 128. Notice that with this technique, the domain wall includes both the regular grain boundaries and the boundaries made of dislocations. 6.3 Results Fig. 6.5 and Fig. 6.6 show the series of images for coarsening dynamics with a quench depth of ε = 0.02 and Two series of angle mapped images show different rates in evolution of domains clearly. The system with a smaller quench has larger domains at time, t = s. As previously reported in Ch. 5, Fig. 6.5 and Fig. 6.6 show





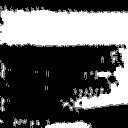


























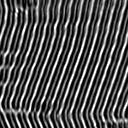































94 88 a d b e c f Figure 6.5: A series of images and corresponding angled image with a quench depth of ε = 0.02: (a)angle mapped image 7950 s after the quench, a white bar at right top corner is 0.25 mm (b)angle mapped image s after the quench (c)angle mapped image s after the quench (d)image 7950 s after the quench (e)image s after the quench (f)image s after the quench a strong anisotropic behavior. At late time of coarsening, the shape of domains are spread in x direction, a direction parallel to the direction of director. In order to compare the growth rate in two images (a) and (c) in two different quench depth Fig. 6.5 and Fig. 6.6,
























































95 89 a d b e c f Figure 6.6: A series of images and corresponding angled image with a quench depth of ε = 0.05: (a)angle mapped image 7950 s after the quench, a white bar at right top corner is 0.25 mm (b)angle mapped image s after the quench (c)angle mapped image s after the quench (d)image 7950 s after the quench (e)image s after the quench (f)image s after the quench ******************* As shown in Fig. 6.6, the shape of domains exhibits the pinning of grain boundaries in early time. Fig. 6.5 exhibits less pinning effect of grain boundaries. For a system with a smaller quench depth of ε = 0.02, the last image taken





false")









, Fig. 6.")





















96 90 a b c Figure 6.7: Image taken hours after a quench of ε = 0.02: (a)original image, (b)angled image, (c)false colored image with detected dislocations hours (5414 τ d ) after the quench show that the domains do not coarsen to the maximum scale size in Fig Thirty four dislocations are detected in this image, Fig Even for a smaller quench (ε = 0.02), Fig. 6.7 exhibits the behavior of a possible pinning effect by a quench depth, ε = Fig. 6.8 shows the evolution of detected numbers of dislocations for quench depth of ε = Two series with a quench of ε = 0.02 of images are taken. For each quench, four different areas of the sample is taken as an image. For each image, the dislocation analysis has been run, and the number of dislocations detected is counted and averaged. Though a possible small pinning effect is observed in Fig. 6.7, there is a monotonic decrease in the number of detected dislocations for the entire observation
Collective Effects. Equilibrium and Nonequilibrium Physics
 Collective Effects in Equilibrium and Nonequilibrium Physics: Lecture 3, 3 March 2006 Collective Effects in Equilibrium and Nonequilibrium Physics Website: http://cncs.bnu.edu.cn/mccross/course/ Caltech
Collective Effects in Equilibrium and Nonequilibrium Physics: Lecture 3, 3 March 2006 Collective Effects in Equilibrium and Nonequilibrium Physics Website: http://cncs.bnu.edu.cn/mccross/course/ Caltech
Patterns of electroconvection in a nematic liquid crystal
 PHYSICAL REVIEW E VOLUME 57, NUMBER 1 JANUARY 1998 Patterns of electroconvection in a nematic liquid crystal Michael Dennin, 1 David S. Cannell, 2 and Guenter Ahlers 2 1 Department of Physics and Astronomy,
PHYSICAL REVIEW E VOLUME 57, NUMBER 1 JANUARY 1998 Patterns of electroconvection in a nematic liquid crystal Michael Dennin, 1 David S. Cannell, 2 and Guenter Ahlers 2 1 Department of Physics and Astronomy,
A Study in Pattern Formation: Electroconvection in Nematic Liquid Crystals
 UNIVERSITY OF CALIFORNIA Santa Barbara A Study in Pattern Formation: Electroconvection in Nematic Liquid Crystals A Dissertation submitted in partial satisfaction of the requirements for the degree of
UNIVERSITY OF CALIFORNIA Santa Barbara A Study in Pattern Formation: Electroconvection in Nematic Liquid Crystals A Dissertation submitted in partial satisfaction of the requirements for the degree of
CONVECTIVE PATTERNS IN LIQUID CRYSTALS DRIVEN BY ELECTRIC FIELD An overview of the onset behaviour
 CONVECTIVE PATTERNS IN LIQUID CRYSTALS DRIVEN BY ELECTRIC FIELD An overview of the onset behaviour Agnes Buka Research Institute for Solid State Physics and Optics of the Hungarian Academy of Sciences
CONVECTIVE PATTERNS IN LIQUID CRYSTALS DRIVEN BY ELECTRIC FIELD An overview of the onset behaviour Agnes Buka Research Institute for Solid State Physics and Optics of the Hungarian Academy of Sciences
A Theory of Spatiotemporal Chaos: What s it mean, and how close are we?
 A Theory of Spatiotemporal Chaos: What s it mean, and how close are we? Michael Dennin UC Irvine Department of Physics and Astronomy Funded by: NSF DMR9975497 Sloan Foundation Research Corporation Outline
A Theory of Spatiotemporal Chaos: What s it mean, and how close are we? Michael Dennin UC Irvine Department of Physics and Astronomy Funded by: NSF DMR9975497 Sloan Foundation Research Corporation Outline
Zig-zag chaos - a new spatiotemporal pattern in nonlinear dynamics
 Zig-zag chaos - a new spatiotemporal pattern in nonlinear dynamics Iuliana Oprea 1, 2 1 Faculty of Mathematics, University of Bucharest, Romania 2 Department of Mathematics, Colorado State University,
Zig-zag chaos - a new spatiotemporal pattern in nonlinear dynamics Iuliana Oprea 1, 2 1 Faculty of Mathematics, University of Bucharest, Romania 2 Department of Mathematics, Colorado State University,
Contents. I Introduction 1. Preface. xiii
 Contents Preface xiii I Introduction 1 1 Continuous matter 3 1.1 Molecules................................ 4 1.2 The continuum approximation.................... 6 1.3 Newtonian mechanics.........................
Contents Preface xiii I Introduction 1 1 Continuous matter 3 1.1 Molecules................................ 4 1.2 The continuum approximation.................... 6 1.3 Newtonian mechanics.........................
Dynamic Self Assembly of Magnetic Colloids
 Institute of Physics, University of Bayreuth Advanced Practical Course in Physics Dynamic Self Assembly of Magnetic Colloids A. Ray and Th. M. Fischer 3 2012 Contents 1. Abstract 3 2. Introduction 3 3.
Institute of Physics, University of Bayreuth Advanced Practical Course in Physics Dynamic Self Assembly of Magnetic Colloids A. Ray and Th. M. Fischer 3 2012 Contents 1. Abstract 3 2. Introduction 3 3.
Fundamentals of Fluid Dynamics: Elementary Viscous Flow
 Fundamentals of Fluid Dynamics: Elementary Viscous Flow Introductory Course on Multiphysics Modelling TOMASZ G. ZIELIŃSKI bluebox.ippt.pan.pl/ tzielins/ Institute of Fundamental Technological Research
Fundamentals of Fluid Dynamics: Elementary Viscous Flow Introductory Course on Multiphysics Modelling TOMASZ G. ZIELIŃSKI bluebox.ippt.pan.pl/ tzielins/ Institute of Fundamental Technological Research
Spatiotemporal Dynamics
 KITP, October 2003: Rayleigh-Bénard Convection 1 Spatiotemporal Dynamics Mark Paul, Keng-Hwee Chiam, Janet Scheel and Michael Cross (Caltech) Henry Greenside and Anand Jayaraman (Duke) Paul Fischer (ANL)
KITP, October 2003: Rayleigh-Bénard Convection 1 Spatiotemporal Dynamics Mark Paul, Keng-Hwee Chiam, Janet Scheel and Michael Cross (Caltech) Henry Greenside and Anand Jayaraman (Duke) Paul Fischer (ANL)
Liquid Crystals IAM-CHOON 1(1100 .,4 WILEY 2007 WILEY-INTERSCIENCE A JOHN WILEY & SONS, INC., PUBLICATION. 'i; Second Edition. n z
 Liquid Crystals Second Edition IAM-CHOON 1(1100.,4 z 'i; BICENTCNNIAL 1 8 0 7 WILEY 2007 DICENTENNIAL n z z r WILEY-INTERSCIENCE A JOHN WILEY & SONS, INC., PUBLICATION Contents Preface xiii Chapter 1.
Liquid Crystals Second Edition IAM-CHOON 1(1100.,4 z 'i; BICENTCNNIAL 1 8 0 7 WILEY 2007 DICENTENNIAL n z z r WILEY-INTERSCIENCE A JOHN WILEY & SONS, INC., PUBLICATION Contents Preface xiii Chapter 1.
Isotropic and anisotropic electroconvection
 Physics Reports 448 (2007) 115 132 www.elsevier.com/locate/physrep Isotropic and anisotropic electroconvection Ágnes Buka a,, Nándor Éber a, Werner Pesch b, Lorenz Kramer b a Research Institute for Solid
Physics Reports 448 (2007) 115 132 www.elsevier.com/locate/physrep Isotropic and anisotropic electroconvection Ágnes Buka a,, Nándor Éber a, Werner Pesch b, Lorenz Kramer b a Research Institute for Solid
V (r,t) = i ˆ u( x, y,z,t) + ˆ j v( x, y,z,t) + k ˆ w( x, y, z,t)
 = i ˆ u( x, y,z,t) + ˆ j v( x, y,z,t) + k ˆ w( x, y, z,t)") IV. DIFFERENTIAL RELATIONS FOR A FLUID PARTICLE This chapter presents the development and application of the basic differential equations of fluid motion. Simplifications in the general equations and common
IV. DIFFERENTIAL RELATIONS FOR A FLUID PARTICLE This chapter presents the development and application of the basic differential equations of fluid motion. Simplifications in the general equations and common
Summary of Fourier Optics
 Summary of Fourier Optics Diffraction of the paraxial wave is described by Fresnel diffraction integral, u(x, y, z) = j λz dx 0 dy 0 u 0 (x 0, y 0 )e j(k/2z)[(x x 0) 2 +(y y 0 ) 2 )], Fraunhofer diffraction
Summary of Fourier Optics Diffraction of the paraxial wave is described by Fresnel diffraction integral, u(x, y, z) = j λz dx 0 dy 0 u 0 (x 0, y 0 )e j(k/2z)[(x x 0) 2 +(y y 0 ) 2 )], Fraunhofer diffraction
In Situ Imaging of Cold Atomic Gases
 In Situ Imaging of Cold Atomic Gases J. D. Crossno Abstract: In general, the complex atomic susceptibility, that dictates both the amplitude and phase modulation imparted by an atom on a probing monochromatic
In Situ Imaging of Cold Atomic Gases J. D. Crossno Abstract: In general, the complex atomic susceptibility, that dictates both the amplitude and phase modulation imparted by an atom on a probing monochromatic
7 The Navier-Stokes Equations
 18.354/12.27 Spring 214 7 The Navier-Stokes Equations In the previous section, we have seen how one can deduce the general structure of hydrodynamic equations from purely macroscopic considerations and
18.354/12.27 Spring 214 7 The Navier-Stokes Equations In the previous section, we have seen how one can deduce the general structure of hydrodynamic equations from purely macroscopic considerations and
Lecture 5: Polarization. Polarized Light in the Universe. Descriptions of Polarized Light. Polarizers. Retarders. Outline
 Lecture 5: Polarization Outline 1 Polarized Light in the Universe 2 Descriptions of Polarized Light 3 Polarizers 4 Retarders Christoph U. Keller, Leiden University, keller@strw.leidenuniv.nl ATI 2016,
Lecture 5: Polarization Outline 1 Polarized Light in the Universe 2 Descriptions of Polarized Light 3 Polarizers 4 Retarders Christoph U. Keller, Leiden University, keller@strw.leidenuniv.nl ATI 2016,
High-Resolution. Transmission. Electron Microscopy
 Part 4 High-Resolution Transmission Electron Microscopy 186 Significance high-resolution transmission electron microscopy (HRTEM): resolve object details smaller than 1nm (10 9 m) image the interior of
Part 4 High-Resolution Transmission Electron Microscopy 186 Significance high-resolution transmission electron microscopy (HRTEM): resolve object details smaller than 1nm (10 9 m) image the interior of
5 Topological defects and textures in ordered media
 5 Topological defects and textures in ordered media In this chapter we consider how to classify topological defects and textures in ordered media. We give here only a very short account of the method following
5 Topological defects and textures in ordered media In this chapter we consider how to classify topological defects and textures in ordered media. We give here only a very short account of the method following
Advection of nematic liquid crystals by chaotic flow
 Advection of nematic liquid crystals by chaotic flow Lennon Ó Náraigh Home fixture 21st September 2016 Advection of nematic liquid crystals by chaotic flow 21st September 2016 1 / 31 Context of work Liquid
Advection of nematic liquid crystals by chaotic flow Lennon Ó Náraigh Home fixture 21st September 2016 Advection of nematic liquid crystals by chaotic flow 21st September 2016 1 / 31 Context of work Liquid
Game Physics. Game and Media Technology Master Program - Utrecht University. Dr. Nicolas Pronost
 Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Soft body physics Soft bodies In reality, objects are not purely rigid for some it is a good approximation but if you hit
Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Soft body physics Soft bodies In reality, objects are not purely rigid for some it is a good approximation but if you hit
PEAT SEISMOLOGY Lecture 9: Anisotropy, attenuation and anelasticity
 PEAT8002 - SEISMOLOGY Lecture 9: Anisotropy, attenuation and anelasticity Nick Rawlinson Research School of Earth Sciences Australian National University Anisotropy Introduction Most of the theoretical
PEAT8002 - SEISMOLOGY Lecture 9: Anisotropy, attenuation and anelasticity Nick Rawlinson Research School of Earth Sciences Australian National University Anisotropy Introduction Most of the theoretical
TEXTURE DEVELOPMENT IN THE SHEAR FLOW OF NEMATIC SOLUTIONS OF RODLIKE POLYMERS. Guy C. Berry
 TEXTURE DEVELOPMENT IN THE SHEAR FLOW OF NEMATIC SOLUTIONS OF RODLIKE POLYMERS Guy C. Berry www.chem.cmu.edu/berry Department of Chemistry Carnegie Mellon University Zhanjie Tan Sudha Vijaykumar 1 Beibei
TEXTURE DEVELOPMENT IN THE SHEAR FLOW OF NEMATIC SOLUTIONS OF RODLIKE POLYMERS Guy C. Berry www.chem.cmu.edu/berry Department of Chemistry Carnegie Mellon University Zhanjie Tan Sudha Vijaykumar 1 Beibei
Chapter 2: Fluid Dynamics Review
 7 Chapter 2: Fluid Dynamics Review This chapter serves as a short review of basic fluid mechanics. We derive the relevant transport equations (or conservation equations), state Newton s viscosity law leading
7 Chapter 2: Fluid Dynamics Review This chapter serves as a short review of basic fluid mechanics. We derive the relevant transport equations (or conservation equations), state Newton s viscosity law leading
Linearized Theory: Sound Waves
 Linearized Theory: Sound Waves In the linearized limit, Λ iα becomes δ iα, and the distinction between the reference and target spaces effectively vanishes. K ij (q): Rigidity matrix Note c L = c T in
Linearized Theory: Sound Waves In the linearized limit, Λ iα becomes δ iα, and the distinction between the reference and target spaces effectively vanishes. K ij (q): Rigidity matrix Note c L = c T in
Chapter 5. Effects of Photonic Crystal Band Gap on Rotation and Deformation of Hollow Te Rods in Triangular Lattice
 Chapter 5 Effects of Photonic Crystal Band Gap on Rotation and Deformation of Hollow Te Rods in Triangular Lattice In chapter 3 and 4, we have demonstrated that the deformed rods, rotational rods and perturbation
Chapter 5 Effects of Photonic Crystal Band Gap on Rotation and Deformation of Hollow Te Rods in Triangular Lattice In chapter 3 and 4, we have demonstrated that the deformed rods, rotational rods and perturbation
Electromagnetic fields and waves
 Electromagnetic fields and waves Maxwell s rainbow Outline Maxwell s equations Plane waves Pulses and group velocity Polarization of light Transmission and reflection at an interface Macroscopic Maxwell
Electromagnetic fields and waves Maxwell s rainbow Outline Maxwell s equations Plane waves Pulses and group velocity Polarization of light Transmission and reflection at an interface Macroscopic Maxwell
Collective Effects. Equilibrium and Nonequilibrium Physics
 Collective Effects in Equilibrium and Nonequilibrium Physics: Lecture 4, April 7, 2006 1 Collective Effects in Equilibrium and Nonequilibrium Physics Website: http://cncs.bnu.edu.cn/mccross/course/ Caltech
Collective Effects in Equilibrium and Nonequilibrium Physics: Lecture 4, April 7, 2006 1 Collective Effects in Equilibrium and Nonequilibrium Physics Website: http://cncs.bnu.edu.cn/mccross/course/ Caltech
You may not start to read the questions printed on the subsequent pages until instructed to do so by the Invigilator.
 MATHEMATICAL TRIPOS Part III Thursday 1 June 2006 1.30 to 4.30 PAPER 76 NONLINEAR CONTINUUM MECHANICS Attempt FOUR questions. There are SIX questions in total. The questions carry equal weight. STATIONERY
MATHEMATICAL TRIPOS Part III Thursday 1 June 2006 1.30 to 4.30 PAPER 76 NONLINEAR CONTINUUM MECHANICS Attempt FOUR questions. There are SIX questions in total. The questions carry equal weight. STATIONERY
Introduction to Polarization
 Phone: Ext 659, E-mail: hcchui@mail.ncku.edu.tw Fall/007 Introduction to Polarization Text Book: A Yariv and P Yeh, Photonics, Oxford (007) 1.6 Polarization States and Representations (Stokes Parameters
Phone: Ext 659, E-mail: hcchui@mail.ncku.edu.tw Fall/007 Introduction to Polarization Text Book: A Yariv and P Yeh, Photonics, Oxford (007) 1.6 Polarization States and Representations (Stokes Parameters
Lecture 8: Tissue Mechanics
 Computational Biology Group (CoBi), D-BSSE, ETHZ Lecture 8: Tissue Mechanics Prof Dagmar Iber, PhD DPhil MSc Computational Biology 2015/16 7. Mai 2016 2 / 57 Contents 1 Introduction to Elastic Materials
Computational Biology Group (CoBi), D-BSSE, ETHZ Lecture 8: Tissue Mechanics Prof Dagmar Iber, PhD DPhil MSc Computational Biology 2015/16 7. Mai 2016 2 / 57 Contents 1 Introduction to Elastic Materials
1 Fundamentals of laser energy absorption
 1 Fundamentals of laser energy absorption 1.1 Classical electromagnetic-theory concepts 1.1.1 Electric and magnetic properties of materials Electric and magnetic fields can exert forces directly on atoms
1 Fundamentals of laser energy absorption 1.1 Classical electromagnetic-theory concepts 1.1.1 Electric and magnetic properties of materials Electric and magnetic fields can exert forces directly on atoms
Effect of Anisotropic Permeability on Band Growth
 Effect of Anisotropic Permeability on Band Growth Jesse Taylor-West October 7, 24 Introduction The mechanics of partially molten regions of the mantle are not well understood- in part due to the inaccessibility
Effect of Anisotropic Permeability on Band Growth Jesse Taylor-West October 7, 24 Introduction The mechanics of partially molten regions of the mantle are not well understood- in part due to the inaccessibility
CLASSICAL ELECTRICITY
 CLASSICAL ELECTRICITY AND MAGNETISM by WOLFGANG K. H. PANOFSKY Stanford University and MELBA PHILLIPS Washington University SECOND EDITION ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo
CLASSICAL ELECTRICITY AND MAGNETISM by WOLFGANG K. H. PANOFSKY Stanford University and MELBA PHILLIPS Washington University SECOND EDITION ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo
General introduction to Hydrodynamic Instabilities
 KTH ROYAL INSTITUTE OF TECHNOLOGY General introduction to Hydrodynamic Instabilities L. Brandt & J.-Ch. Loiseau KTH Mechanics, November 2015 Luca Brandt Professor at KTH Mechanics Email: luca@mech.kth.se
KTH ROYAL INSTITUTE OF TECHNOLOGY General introduction to Hydrodynamic Instabilities L. Brandt & J.-Ch. Loiseau KTH Mechanics, November 2015 Luca Brandt Professor at KTH Mechanics Email: luca@mech.kth.se
Electromagnetically Induced Flows in Water
 Electromagnetically Induced Flows in Water Michiel de Reus 8 maart 213 () Electromagnetically Induced Flows 1 / 56 Outline 1 Introduction 2 Maxwell equations Complex Maxwell equations 3 Gaussian sources
Electromagnetically Induced Flows in Water Michiel de Reus 8 maart 213 () Electromagnetically Induced Flows 1 / 56 Outline 1 Introduction 2 Maxwell equations Complex Maxwell equations 3 Gaussian sources
Physics 127b: Statistical Mechanics. Landau Theory of Second Order Phase Transitions. Order Parameter
 Physics 127b: Statistical Mechanics Landau Theory of Second Order Phase Transitions Order Parameter Second order phase transitions occur when a new state of reduced symmetry develops continuously from
Physics 127b: Statistical Mechanics Landau Theory of Second Order Phase Transitions Order Parameter Second order phase transitions occur when a new state of reduced symmetry develops continuously from
Liquid crystal in confined environment
 Liquid crystal in confined environment Adviser: Prof. Rudi Podgornik Supervisor: Prof. Igor Muševič By Maryam Nikkhou September 2011 Contents Abstract.................................................................
Liquid crystal in confined environment Adviser: Prof. Rudi Podgornik Supervisor: Prof. Igor Muševič By Maryam Nikkhou September 2011 Contents Abstract.................................................................
Kinematics of fluid motion
 Chapter 4 Kinematics of fluid motion 4.1 Elementary flow patterns Recall the discussion of flow patterns in Chapter 1. The equations for particle paths in a three-dimensional, steady fluid flow are dx
Chapter 4 Kinematics of fluid motion 4.1 Elementary flow patterns Recall the discussion of flow patterns in Chapter 1. The equations for particle paths in a three-dimensional, steady fluid flow are dx
Chapter 1. Continuum mechanics review. 1.1 Definitions and nomenclature
 Chapter 1 Continuum mechanics review We will assume some familiarity with continuum mechanics as discussed in the context of an introductory geodynamics course; a good reference for such problems is Turcotte
Chapter 1 Continuum mechanics review We will assume some familiarity with continuum mechanics as discussed in the context of an introductory geodynamics course; a good reference for such problems is Turcotte
J10M.1 - Rod on a Rail (M93M.2)
") Part I - Mechanics J10M.1 - Rod on a Rail (M93M.2) J10M.1 - Rod on a Rail (M93M.2) s α l θ g z x A uniform rod of length l and mass m moves in the x-z plane. One end of the rod is suspended from a straight
Part I - Mechanics J10M.1 - Rod on a Rail (M93M.2) J10M.1 - Rod on a Rail (M93M.2) s α l θ g z x A uniform rod of length l and mass m moves in the x-z plane. One end of the rod is suspended from a straight
Introduction LECTURE 1
 LECTURE 1 Introduction The source of all great mathematics is the special case, the concrete example. It is frequent in mathematics that every instance of a concept of seemingly great generality is in
LECTURE 1 Introduction The source of all great mathematics is the special case, the concrete example. It is frequent in mathematics that every instance of a concept of seemingly great generality is in
Building a holographic liquid crystal
 Building a holographic liquid crystal Piotr Surówka Vrije Universiteit Brussel Ongoing work with R. Rahman and G. Compère Gauge/Gravity Duality, Munich, 01.08.2013 Motivation Hydrodynamics is an effective
Building a holographic liquid crystal Piotr Surówka Vrije Universiteit Brussel Ongoing work with R. Rahman and G. Compère Gauge/Gravity Duality, Munich, 01.08.2013 Motivation Hydrodynamics is an effective
Shear Flow of a Nematic Liquid Crystal near a Charged Surface
 Physics of the Solid State, Vol. 45, No. 6, 00, pp. 9 96. Translated from Fizika Tverdogo Tela, Vol. 45, No. 6, 00, pp. 5 40. Original Russian Text Copyright 00 by Zakharov, Vakulenko. POLYMERS AND LIQUID
Physics of the Solid State, Vol. 45, No. 6, 00, pp. 9 96. Translated from Fizika Tverdogo Tela, Vol. 45, No. 6, 00, pp. 5 40. Original Russian Text Copyright 00 by Zakharov, Vakulenko. POLYMERS AND LIQUID
CENG 501 Examination Problem: Estimation of Viscosity with a Falling - Cylinder Viscometer
 CENG 501 Examination Problem: Estimation of Viscosity with a Falling - Cylinder Viscometer You are assigned to design a fallingcylinder viscometer to measure the viscosity of Newtonian liquids. A schematic
CENG 501 Examination Problem: Estimation of Viscosity with a Falling - Cylinder Viscometer You are assigned to design a fallingcylinder viscometer to measure the viscosity of Newtonian liquids. A schematic
Chapter 9: Differential Analysis of Fluid Flow
 of Fluid Flow Objectives 1. Understand how the differential equations of mass and momentum conservation are derived. 2. Calculate the stream function and pressure field, and plot streamlines for a known
of Fluid Flow Objectives 1. Understand how the differential equations of mass and momentum conservation are derived. 2. Calculate the stream function and pressure field, and plot streamlines for a known
Fundamentals of Fluid Dynamics: Waves in Fluids
 Fundamentals of Fluid Dynamics: Waves in Fluids Introductory Course on Multiphysics Modelling TOMASZ G. ZIELIŃSKI (after: D.J. ACHESON s Elementary Fluid Dynamics ) bluebox.ippt.pan.pl/ tzielins/ Institute
Fundamentals of Fluid Dynamics: Waves in Fluids Introductory Course on Multiphysics Modelling TOMASZ G. ZIELIŃSKI (after: D.J. ACHESON s Elementary Fluid Dynamics ) bluebox.ippt.pan.pl/ tzielins/ Institute
A Ginzburg-Landau Type Problem for Nematics with Highly Anisotropic Elastic Term
 A Ginzburg-Landau Type Problem for Nematics with Highly Anisotropic Elastic Term Peter Sternberg In collaboration with Dmitry Golovaty (Akron) and Raghav Venkatraman (Indiana) Department of Mathematics
A Ginzburg-Landau Type Problem for Nematics with Highly Anisotropic Elastic Term Peter Sternberg In collaboration with Dmitry Golovaty (Akron) and Raghav Venkatraman (Indiana) Department of Mathematics
Spatio-Temporal Chaos in Pattern-Forming Systems: Defects and Bursts
 Spatio-Temporal Chaos in Pattern-Forming Systems: Defects and Bursts with Santiago Madruga, MPIPKS Dresden Werner Pesch, U. Bayreuth Yuan-Nan Young, New Jersey Inst. Techn. DPG Frühjahrstagung 31.3.2006
Spatio-Temporal Chaos in Pattern-Forming Systems: Defects and Bursts with Santiago Madruga, MPIPKS Dresden Werner Pesch, U. Bayreuth Yuan-Nan Young, New Jersey Inst. Techn. DPG Frühjahrstagung 31.3.2006
PEAT SEISMOLOGY Lecture 2: Continuum mechanics
 PEAT8002 - SEISMOLOGY Lecture 2: Continuum mechanics Nick Rawlinson Research School of Earth Sciences Australian National University Strain Strain is the formal description of the change in shape of a
PEAT8002 - SEISMOLOGY Lecture 2: Continuum mechanics Nick Rawlinson Research School of Earth Sciences Australian National University Strain Strain is the formal description of the change in shape of a
202 Index. failure, 26 field equation, 122 force, 1
 Index acceleration, 12, 161 admissible function, 155 admissible stress, 32 Airy's stress function, 122, 124 d'alembert's principle, 165, 167, 177 amplitude, 171 analogy, 76 anisotropic material, 20 aperiodic
Index acceleration, 12, 161 admissible function, 155 admissible stress, 32 Airy's stress function, 122, 124 d'alembert's principle, 165, 167, 177 amplitude, 171 analogy, 76 anisotropic material, 20 aperiodic
Experiments on Thermally Driven Convection
 Experiments on Thermally Driven Convection Guenter Ahlers ABSTRACT Experimental results for thermally driven convection in a thin horizontal layer of a nematic liquid crystal heated from below or above
Experiments on Thermally Driven Convection Guenter Ahlers ABSTRACT Experimental results for thermally driven convection in a thin horizontal layer of a nematic liquid crystal heated from below or above
Symmetry Properties of Confined Convective States
 Symmetry Properties of Confined Convective States John Guckenheimer Cornell University 1 Introduction This paper is a commentary on the experimental observation observations of Bensimon et al. [1] of convection
Symmetry Properties of Confined Convective States John Guckenheimer Cornell University 1 Introduction This paper is a commentary on the experimental observation observations of Bensimon et al. [1] of convection
Signal Loss. A1 A L[Neper] = ln or L[dB] = 20log 1. Proportional loss of signal amplitude with increasing propagation distance: = α d
![Signal Loss. A1 A L[Neper] = ln or L[dB] = 20log 1. Proportional loss of signal amplitude with increasing propagation distance: = α d](/thumbs/89/98517557.jpg "Signal Loss. A1 A L[Neper] = ln or L[dB] = 20log 1. Proportional loss of signal amplitude with increasing propagation distance: = α d") Part 6 ATTENUATION Signal Loss Loss of signal amplitude: A1 A L[Neper] = ln or L[dB] = 0log 1 A A A 1 is the amplitude without loss A is the amplitude with loss Proportional loss of signal amplitude with
Part 6 ATTENUATION Signal Loss Loss of signal amplitude: A1 A L[Neper] = ln or L[dB] = 0log 1 A A A 1 is the amplitude without loss A is the amplitude with loss Proportional loss of signal amplitude with
Lecture 4: Anisotropic Media. Dichroism. Optical Activity. Faraday Effect in Transparent Media. Stress Birefringence. Form Birefringence
 Lecture 4: Anisotropic Media Outline Dichroism Optical Activity 3 Faraday Effect in Transparent Media 4 Stress Birefringence 5 Form Birefringence 6 Electro-Optics Dichroism some materials exhibit different
Lecture 4: Anisotropic Media Outline Dichroism Optical Activity 3 Faraday Effect in Transparent Media 4 Stress Birefringence 5 Form Birefringence 6 Electro-Optics Dichroism some materials exhibit different
3 2 6 Solve the initial value problem u ( t) 3. a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1
 3. a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1") Math Problem a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1 3 6 Solve the initial value problem u ( t) = Au( t) with u (0) =. 3 1 u 1 =, u 1 3 = b- True or false and why 1. if A is
Math Problem a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1 3 6 Solve the initial value problem u ( t) = Au( t) with u (0) =. 3 1 u 1 =, u 1 3 = b- True or false and why 1. if A is
Dynamical scaling behavior of the Swift-Hohenberg equation following a quench to the modulated state. Q. Hou*, S. Sasa, N.
 ELSEVIER Physica A 239 (1997) 219-226 PHYSICA Dynamical scaling behavior of the Swift-Hohenberg equation following a quench to the modulated state Q. Hou*, S. Sasa, N. Goldenfeld Physics Department, 1110
ELSEVIER Physica A 239 (1997) 219-226 PHYSICA Dynamical scaling behavior of the Swift-Hohenberg equation following a quench to the modulated state Q. Hou*, S. Sasa, N. Goldenfeld Physics Department, 1110
Continuum Mechanics. Continuum Mechanics and Constitutive Equations
 Continuum Mechanics Continuum Mechanics and Constitutive Equations Continuum mechanics pertains to the description of mechanical behavior of materials under the assumption that the material is a uniform
Continuum Mechanics Continuum Mechanics and Constitutive Equations Continuum mechanics pertains to the description of mechanical behavior of materials under the assumption that the material is a uniform
Chapter 9: Differential Analysis
 9-1 Introduction 9-2 Conservation of Mass 9-3 The Stream Function 9-4 Conservation of Linear Momentum 9-5 Navier Stokes Equation 9-6 Differential Analysis Problems Recall 9-1 Introduction (1) Chap 5: Control
9-1 Introduction 9-2 Conservation of Mass 9-3 The Stream Function 9-4 Conservation of Linear Momentum 9-5 Navier Stokes Equation 9-6 Differential Analysis Problems Recall 9-1 Introduction (1) Chap 5: Control
Square patterns and their dynamics in electroconvection
 Square patterns and their dynamics in electroconvection Elżbieta Kochowska *, Nándor Éber, Wojciech Otowski #, Ágnes Buka Research Institute for Solid State Physics and Optics, Hungarian Academy of Sciences,
Square patterns and their dynamics in electroconvection Elżbieta Kochowska *, Nándor Éber, Wojciech Otowski #, Ágnes Buka Research Institute for Solid State Physics and Optics, Hungarian Academy of Sciences,
Quick Recapitulation of Fluid Mechanics
 Quick Recapitulation of Fluid Mechanics Amey Joshi 07-Feb-018 1 Equations of ideal fluids onsider a volume element of a fluid of density ρ. If there are no sources or sinks in, the mass in it will change
Quick Recapitulation of Fluid Mechanics Amey Joshi 07-Feb-018 1 Equations of ideal fluids onsider a volume element of a fluid of density ρ. If there are no sources or sinks in, the mass in it will change
Soft Bodies. Good approximation for hard ones. approximation breaks when objects break, or deform. Generalization: soft (deformable) bodies
 bodies") Soft-Body Physics Soft Bodies Realistic objects are not purely rigid. Good approximation for hard ones. approximation breaks when objects break, or deform. Generalization: soft (deformable) bodies Deformed
Soft-Body Physics Soft Bodies Realistic objects are not purely rigid. Good approximation for hard ones. approximation breaks when objects break, or deform. Generalization: soft (deformable) bodies Deformed
The Polymers Tug Back
 Tugging at Polymers in Turbulent Flow The Polymers Tug Back Jean-Luc Thiffeault http://plasma.ap.columbia.edu/ jeanluc Department of Applied Physics and Applied Mathematics Columbia University Tugging
Tugging at Polymers in Turbulent Flow The Polymers Tug Back Jean-Luc Thiffeault http://plasma.ap.columbia.edu/ jeanluc Department of Applied Physics and Applied Mathematics Columbia University Tugging
Pattern Formation and Chaos
 Developments in Experimental Pattern Formation - Isaac Newton Institute, 2005 1 Pattern Formation and Chaos Insights from Large Scale Numerical Simulations of Rayleigh-Bénard Convection Collaborators:
Developments in Experimental Pattern Formation - Isaac Newton Institute, 2005 1 Pattern Formation and Chaos Insights from Large Scale Numerical Simulations of Rayleigh-Bénard Convection Collaborators:
Plasma waves in the fluid picture I
 Plasma waves in the fluid picture I Langmuir oscillations and waves Ion-acoustic waves Debye length Ordinary electromagnetic waves General wave equation General dispersion equation Dielectric response
Plasma waves in the fluid picture I Langmuir oscillations and waves Ion-acoustic waves Debye length Ordinary electromagnetic waves General wave equation General dispersion equation Dielectric response
phases of liquid crystals and their transitions
 phases of liquid crystals and their transitions Term paper for PHYS 569 Xiaoxiao Wang Abstract A brief introduction of liquid crystals and their phases is provided in this paper. Liquid crystal is a state
phases of liquid crystals and their transitions Term paper for PHYS 569 Xiaoxiao Wang Abstract A brief introduction of liquid crystals and their phases is provided in this paper. Liquid crystal is a state
Where k = 1. The electric field produced by a point charge is given by
 Ch 21 review: 1. Electric charge: Electric charge is a property of a matter. There are two kinds of charges, positive and negative. Charges of the same sign repel each other. Charges of opposite sign attract.
Ch 21 review: 1. Electric charge: Electric charge is a property of a matter. There are two kinds of charges, positive and negative. Charges of the same sign repel each other. Charges of opposite sign attract.
Constitutive Equations
 Constitutive quations David Roylance Department of Materials Science and ngineering Massachusetts Institute of Technology Cambridge, MA 0239 October 4, 2000 Introduction The modules on kinematics (Module
Constitutive quations David Roylance Department of Materials Science and ngineering Massachusetts Institute of Technology Cambridge, MA 0239 October 4, 2000 Introduction The modules on kinematics (Module
Spatiotemporal Chaos in Rayleigh-Bénard Convection
 Spatiotemporal Chaos in Rayleigh-Bénard Convection Michael Cross California Institute of Technology Beijing Normal University June 2006 Janet Scheel, Keng-Hwee Chiam, Mark Paul Henry Greenside, Anand Jayaraman
Spatiotemporal Chaos in Rayleigh-Bénard Convection Michael Cross California Institute of Technology Beijing Normal University June 2006 Janet Scheel, Keng-Hwee Chiam, Mark Paul Henry Greenside, Anand Jayaraman
Macroscopic plasma description
 Macroscopic plasma description Macroscopic plasma theories are fluid theories at different levels single fluid (magnetohydrodynamics MHD) two-fluid (multifluid, separate equations for electron and ion
Macroscopic plasma description Macroscopic plasma theories are fluid theories at different levels single fluid (magnetohydrodynamics MHD) two-fluid (multifluid, separate equations for electron and ion
Onset of electroconvection of homeotropically aligned nematic liquid crystals
 Onset of electroconvection of homeotropically aligned nematic liquid crystals Sheng-Qi Zhou, 1 Nándor Éber, 2 Ágnes Buka, 2 Werner Pesch, 3 and Guenter Ahlers 1 1 Department of Physics and iqcd, University
Onset of electroconvection of homeotropically aligned nematic liquid crystals Sheng-Qi Zhou, 1 Nándor Éber, 2 Ágnes Buka, 2 Werner Pesch, 3 and Guenter Ahlers 1 1 Department of Physics and iqcd, University
Fluid equations, magnetohydrodynamics
 Fluid equations, magnetohydrodynamics Multi-fluid theory Equation of state Single-fluid theory Generalised Ohm s law Magnetic tension and plasma beta Stationarity and equilibria Validity of magnetohydrodynamics
Fluid equations, magnetohydrodynamics Multi-fluid theory Equation of state Single-fluid theory Generalised Ohm s law Magnetic tension and plasma beta Stationarity and equilibria Validity of magnetohydrodynamics
J07M.1 - Ball on a Turntable
 Part I - Mechanics J07M.1 - Ball on a Turntable J07M.1 - Ball on a Turntable ẑ Ω A spherically symmetric ball of mass m, moment of inertia I about any axis through its center, and radius a, rolls without
Part I - Mechanics J07M.1 - Ball on a Turntable J07M.1 - Ball on a Turntable ẑ Ω A spherically symmetric ball of mass m, moment of inertia I about any axis through its center, and radius a, rolls without
6.1 Momentum Equation for Frictionless Flow: Euler s Equation The equations of motion for frictionless flow, called Euler s
 Chapter 6 INCOMPRESSIBLE INVISCID FLOW All real fluids possess viscosity. However in many flow cases it is reasonable to neglect the effects of viscosity. It is useful to investigate the dynamics of an
Chapter 6 INCOMPRESSIBLE INVISCID FLOW All real fluids possess viscosity. However in many flow cases it is reasonable to neglect the effects of viscosity. It is useful to investigate the dynamics of an
Consider an elastic spring as shown in the Fig.2.4. When the spring is slowly
 .3 Strain Energy Consider an elastic spring as shown in the Fig..4. When the spring is slowly pulled, it deflects by a small amount u 1. When the load is removed from the spring, it goes back to the original
.3 Strain Energy Consider an elastic spring as shown in the Fig..4. When the spring is slowly pulled, it deflects by a small amount u 1. When the load is removed from the spring, it goes back to the original
UNIVERSITY of LIMERICK
 UNIVERSITY of LIMERICK OLLSCOIL LUIMNIGH Faculty of Science and Engineering END OF SEMESTER ASSESSMENT PAPER MODULE CODE: MA4607 SEMESTER: Autumn 2012-13 MODULE TITLE: Introduction to Fluids DURATION OF
UNIVERSITY of LIMERICK OLLSCOIL LUIMNIGH Faculty of Science and Engineering END OF SEMESTER ASSESSMENT PAPER MODULE CODE: MA4607 SEMESTER: Autumn 2012-13 MODULE TITLE: Introduction to Fluids DURATION OF
theory, which can be quite useful in more complex systems.
 Physics 7653: Statistical Physics http://www.physics.cornell.edu/sethna/teaching/653/ In Class Exercises Last correction at August 30, 2018, 11:55 am c 2017, James Sethna, all rights reserved 9.5 Landau
Physics 7653: Statistical Physics http://www.physics.cornell.edu/sethna/teaching/653/ In Class Exercises Last correction at August 30, 2018, 11:55 am c 2017, James Sethna, all rights reserved 9.5 Landau
Mechanical effects of light spin and orbital angular momentum in liquid crystals
 Mechanical effects of light spin and orbital angular momentum in liquid crystals E.Santamato Università degli Studi di Napoli Federico II Dipartimento di Scienze Fisiche Complesso di Monte S. Angelo via
Mechanical effects of light spin and orbital angular momentum in liquid crystals E.Santamato Università degli Studi di Napoli Federico II Dipartimento di Scienze Fisiche Complesso di Monte S. Angelo via
1 Superfluidity and Bose Einstein Condensate
 Physics 223b Lecture 4 Caltech, 04/11/18 1 Superfluidity and Bose Einstein Condensate 1.6 Superfluid phase: topological defect Besides such smooth gapless excitations, superfluid can also support a very
Physics 223b Lecture 4 Caltech, 04/11/18 1 Superfluidity and Bose Einstein Condensate 1.6 Superfluid phase: topological defect Besides such smooth gapless excitations, superfluid can also support a very
Computational Astrophysics
 Computational Astrophysics Lecture 1: Introduction to numerical methods Lecture 2:The SPH formulation Lecture 3: Construction of SPH smoothing functions Lecture 4: SPH for general dynamic flow Lecture
Computational Astrophysics Lecture 1: Introduction to numerical methods Lecture 2:The SPH formulation Lecture 3: Construction of SPH smoothing functions Lecture 4: SPH for general dynamic flow Lecture
Review of fluid dynamics
 Chapter 2 Review of fluid dynamics 2.1 Preliminaries ome basic concepts: A fluid is a substance that deforms continuously under stress. A Material olume is a tagged region that moves with the fluid. Hence
Chapter 2 Review of fluid dynamics 2.1 Preliminaries ome basic concepts: A fluid is a substance that deforms continuously under stress. A Material olume is a tagged region that moves with the fluid. Hence
Brewster Angle and Total Internal Reflection
 Lecture 5: Polarization Outline 1 Polarized Light in the Universe 2 Brewster Angle and Total Internal Reflection 3 Descriptions of Polarized Light 4 Polarizers 5 Retarders Christoph U. Keller, Leiden University,
Lecture 5: Polarization Outline 1 Polarized Light in the Universe 2 Brewster Angle and Total Internal Reflection 3 Descriptions of Polarized Light 4 Polarizers 5 Retarders Christoph U. Keller, Leiden University,
Going with the flow: A study of Lagrangian derivatives
 1 Going with the flow: A study of Lagrangian derivatives Jean-Luc Thiffeault Department of Applied Physics and Applied Mathematics Columbia University http://plasma.ap.columbia.edu/~jeanluc/ 12 February
1 Going with the flow: A study of Lagrangian derivatives Jean-Luc Thiffeault Department of Applied Physics and Applied Mathematics Columbia University http://plasma.ap.columbia.edu/~jeanluc/ 12 February
Navier-Stokes Equation: Principle of Conservation of Momentum
 Navier-tokes Equation: Principle of Conservation of Momentum R. hankar ubramanian Department of Chemical and Biomolecular Engineering Clarkson University Newton formulated the principle of conservation
Navier-tokes Equation: Principle of Conservation of Momentum R. hankar ubramanian Department of Chemical and Biomolecular Engineering Clarkson University Newton formulated the principle of conservation
- Marine Hydrodynamics. Lecture 4. Knowns Equations # Unknowns # (conservation of mass) (conservation of momentum)
 (conservation of momentum)") 2.20 - Marine Hydrodynamics, Spring 2005 Lecture 4 2.20 - Marine Hydrodynamics Lecture 4 Introduction Governing Equations so far: Knowns Equations # Unknowns # density ρ( x, t) Continuity 1 velocities
2.20 - Marine Hydrodynamics, Spring 2005 Lecture 4 2.20 - Marine Hydrodynamics Lecture 4 Introduction Governing Equations so far: Knowns Equations # Unknowns # density ρ( x, t) Continuity 1 velocities
7 EQUATIONS OF MOTION FOR AN INVISCID FLUID
 7 EQUATIONS OF MOTION FOR AN INISCID FLUID iscosity is a measure of the thickness of a fluid, and its resistance to shearing motions. Honey is difficult to stir because of its high viscosity, whereas water
7 EQUATIONS OF MOTION FOR AN INISCID FLUID iscosity is a measure of the thickness of a fluid, and its resistance to shearing motions. Honey is difficult to stir because of its high viscosity, whereas water
INDEX 363. Cartesian coordinates 19,20,42, 67, 83 Cartesian tensors 84, 87, 226
 INDEX 363 A Absolute differentiation 120 Absolute scalar field 43 Absolute tensor 45,46,47,48 Acceleration 121, 190, 192 Action integral 198 Addition of systems 6, 51 Addition of tensors 6, 51 Adherence
INDEX 363 A Absolute differentiation 120 Absolute scalar field 43 Absolute tensor 45,46,47,48 Acceleration 121, 190, 192 Action integral 198 Addition of systems 6, 51 Addition of tensors 6, 51 Adherence
Brewster Angle and Total Internal Reflection
 Lecture 4: Polarization Outline 1 Polarized Light in the Universe 2 Brewster Angle and Total Internal Reflection 3 Descriptions of Polarized Light 4 Polarizers 5 Retarders Christoph U. Keller, Utrecht
Lecture 4: Polarization Outline 1 Polarized Light in the Universe 2 Brewster Angle and Total Internal Reflection 3 Descriptions of Polarized Light 4 Polarizers 5 Retarders Christoph U. Keller, Utrecht
Liquid Crystals. Martin Oettel. Some aspects. May 2014
 Liquid Crystals Some aspects Martin Oettel May 14 1 The phases in Physics I gas / vapor change in density (scalar order parameter) no change in continuous translation liquid change in density change from
Liquid Crystals Some aspects Martin Oettel May 14 1 The phases in Physics I gas / vapor change in density (scalar order parameter) no change in continuous translation liquid change in density change from
Geometry and Anchoring Effects on Elliptic Cylinder Domains of Nematic Phases
 Geometry and Anchoring Effects on Elliptic Cylinder Domains of Nematic Phases by Pouya Khayyatzadeh A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree
Geometry and Anchoring Effects on Elliptic Cylinder Domains of Nematic Phases by Pouya Khayyatzadeh A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree
Introduction to Marine Hydrodynamics
 1896 1920 1987 2006 Introduction to Marine Hydrodynamics (NA235) Department of Naval Architecture and Ocean Engineering School of Naval Architecture, Ocean & Civil Engineering First Assignment The first
1896 1920 1987 2006 Introduction to Marine Hydrodynamics (NA235) Department of Naval Architecture and Ocean Engineering School of Naval Architecture, Ocean & Civil Engineering First Assignment The first
Physics 212: Statistical mechanics II Lecture XI
 Physics 212: Statistical mechanics II Lecture XI The main result of the last lecture was a calculation of the averaged magnetization in mean-field theory in Fourier space when the spin at the origin is
Physics 212: Statistical mechanics II Lecture XI The main result of the last lecture was a calculation of the averaged magnetization in mean-field theory in Fourier space when the spin at the origin is
PHYS 432 Physics of Fluids: Instabilities
 PHYS 432 Physics of Fluids: Instabilities 1. Internal gravity waves Background state being perturbed: A stratified fluid in hydrostatic balance. It can be constant density like the ocean or compressible
PHYS 432 Physics of Fluids: Instabilities 1. Internal gravity waves Background state being perturbed: A stratified fluid in hydrostatic balance. It can be constant density like the ocean or compressible
Linear Theory of Evolution to an Unstable State
 Chapter 2 Linear Theory of Evolution to an Unstable State c 2012 by William Klein, Harvey Gould, and Jan Tobochnik 1 October 2012 2.1 Introduction The simple theory of nucleation that we introduced in
Chapter 2 Linear Theory of Evolution to an Unstable State c 2012 by William Klein, Harvey Gould, and Jan Tobochnik 1 October 2012 2.1 Introduction The simple theory of nucleation that we introduced in
35. RESISTIVE INSTABILITIES: CLOSING REMARKS
 35. RESISTIVE INSTABILITIES: CLOSING REMARKS In Section 34 we presented a heuristic discussion of the tearing mode. The tearing mode is centered about x = 0, where F x that B 0 ( ) = k! B = 0. Note that
35. RESISTIVE INSTABILITIES: CLOSING REMARKS In Section 34 we presented a heuristic discussion of the tearing mode. The tearing mode is centered about x = 0, where F x that B 0 ( ) = k! B = 0. Note that
Lecture contents Review: Few concepts from physics Electric field
 1 Lecture contents Review: Few concepts from physics Electric field Coulomb law, Gauss law, Poisson equation, dipole, capacitor Conductors and isolators 1 Electric current Dielectric constant Overview
1 Lecture contents Review: Few concepts from physics Electric field Coulomb law, Gauss law, Poisson equation, dipole, capacitor Conductors and isolators 1 Electric current Dielectric constant Overview
7.2.1 Seismic waves. Waves in a mass- spring system
 7..1 Seismic waves Waves in a mass- spring system Acoustic waves in a liquid or gas Seismic waves in a solid Surface waves Wavefronts, rays and geometrical attenuation Amplitude and energy Waves in a mass-
7..1 Seismic waves Waves in a mass- spring system Acoustic waves in a liquid or gas Seismic waves in a solid Surface waves Wavefronts, rays and geometrical attenuation Amplitude and energy Waves in a mass-
Continuum Theory of Liquid Crystals continued...
 Continuum Theory of Liquid Crystals continued... Iain W. Stewart 25 July 2013 Department of Mathematics and Statistics, University of Strathclyde, Glasgow, UK Raffaella De Vita, Don Leo at Virginia Tech,
Continuum Theory of Liquid Crystals continued... Iain W. Stewart 25 July 2013 Department of Mathematics and Statistics, University of Strathclyde, Glasgow, UK Raffaella De Vita, Don Leo at Virginia Tech,
RHEOLOGY Principles, Measurements, and Applications. Christopher W. Macosko
 RHEOLOGY Principles, Measurements, and Applications I -56081-5'79~5 1994 VCH Publishers. Inc. New York Part I. CONSTITUTIVE RELATIONS 1 1 l Elastic Solid 5 1.1 Introduction 5 1.2 The Stress Tensor 8 1.2.1
RHEOLOGY Principles, Measurements, and Applications I -56081-5'79~5 1994 VCH Publishers. Inc. New York Part I. CONSTITUTIVE RELATIONS 1 1 l Elastic Solid 5 1.1 Introduction 5 1.2 The Stress Tensor 8 1.2.1
Laboratory 9: The Viscosity of Liquids
 Laboratory 9: The Viscosity of Liquids Introduction The essential difference between solids and fluids lies in the nature of their response to the socalled shearing stress. In solids, an elastic force
Laboratory 9: The Viscosity of Liquids Introduction The essential difference between solids and fluids lies in the nature of their response to the socalled shearing stress. In solids, an elastic force