Modeling of vibration systems
|
|
|
- Matilda Alexander
- 5 years ago
- Views:
Transcription
1 Modeling of vibration systes Atual syste Mae design deision Choose physial paraeters, hange or augent syste if neessary Physial odeling Mae siple approiations based on engineering judgeent Physial odel Matheatial odeling Apply physial laws to obtain equation of otion Math odel Tests Atual response Analysis Solve EOM to predit dynai harateristis and tie response Predited response
")




2 Modeling eaple () rider rider vehile strut wheel tire
) = W θ W θ J M r b J r b K T T e C C K(t) Physial odel Physial")
3 Modeling eaple () Helial gear pair Equation of otion M C K( t)( e( t)) = W θ W θ J M r b J r b K T T e C C K(t) Physial odel Physial odel

4 Modeling eaple (3) There is no unique physial odels for one partiular hardware
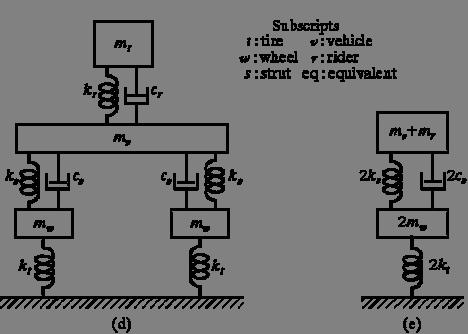
5 Eaple: An autoobile An autoobile oving over a rough road an be odeled onsidering (a) weight of the ar body, passengers, seats, front wheels, and rear wheels; (b) elastiity of tires, suspension; () daping of seats, front and rare suspensions.
6 Eaple: Reiproating engine A reiproating engine is ounted on a foundation as shown. The unbalaned fores and oents developed in the engine are transitted to the frae and the foundation. An elasti pad is plaed between the engine and the foundation blo to redue the transission of vibration. Develop the vibration odel.
7 Engineering judgeent Modeling requires good engineering judgeent and eperienes with hardware. Purposes of odel Assuptions Modeling Model opleity liitations Analysis tehniques
8 Degree of freedo () Degree of freedo (DOF): The iniu nuber of independent oordinates required to deterine opletely the positions of all parts of a syste at any instant of tie. Single degree of freedo systes
9 Degree of freedo () Single degree of freedo systes Two degree of freedo systes
10 Degree of freedo (3) Three-degree of freedo systes
11 Degree of freedo (4) Infinite-nuber-of-degrees-of-freedo systes (ontinuous or distributed systes) Inreasing nuber of degrees of freedo More aurate result More opleity
12 Equations of otion Proedures () Geoetry Define oordinates and their positive diretions Note degrees of freedo (DOF) Write geoetri onstraints and opatibility () Kineatis Write neessary ineati relations (3) Fore equations Draw free-body diagra Apply Newton s nd law on the free body (4) Cobine all relations
13 Eaple : A spring-ass syste () Unstrethed Position Δ Δ (Δ) Stati equilibriu Position g g () Geoetry = ass position easured fro equilibriu position DOF, only EOM required () Kineatis position, veloity, and aeleration are,,
14 Eaple : A spring-ass syste () Unstrethed Position Δ Δ g (Δ) g Stati equilibriu Position (3) Fore equations [ = 0] F At equilibriu g Δ = 0 ; During vibration[ F = a] g ( Δ ) g = = Δ (3) Cobine all relations EOM: = 0
15 Eaple : A spring-ass syste (3) Unstrethed Position Δ Δ g (Δ) g Stati equilibriu Position What if is easured fro the other positions? What if there are the other fores applied to the syste? What if a daper is added to the syste?
16 Eaple : -- systes (DOF) () f(t) l l () Geoetry l, l = positions of and easured when both springs are unstrethed, = positions of and easured fro their unstrethed positions DOFs, EOMs required () Kineatis,,,, and for ass and
17 Eaple : -- systes (DOF) () l l f(t) ( ) ( ) f(t) ( ) ( ) (3) Fore equations [ ] a F = ) ( ) ( = ) ( ) ( ) ( t f = In atri for, EOM is = ) ( t f
18 Eaple : -- systes (DOF) (3) In atri for, EOM is = ) ( t f or siply )(tfkcm= where M is ass or inertia atri C is daping atri K is stiffness atri is position vetor F is input vetor
19 Eaple 3 Draw the free-body diagra and derive the EOM using Newton s seond law of otion
ME357 Problem Set The wheel is a thin homogeneous disk that rolls without slip. sin. The wall moves with a specified motion x t. sin..
 ME357 Proble Set 3 Derive the equation(s) of otion for the systes shown using Newton s Method. For ultiple degree of freedo systes put you answer in atri for. Unless otherwise speified the degrees of freedo
ME357 Proble Set 3 Derive the equation(s) of otion for the systes shown using Newton s Method. For ultiple degree of freedo systes put you answer in atri for. Unless otherwise speified the degrees of freedo
CHAPTER 3 PROBLEMS. δ = where A is the cross-sectional area, and E is the modulus of elasticity.
 CHPTER 3 PROLEMS d SPRING-MSS-DMPER PPLICTIONS Proble 3.1 The buoy shown in figure P3.1 has a irular ross-setion with diaeter d and has length L. Most of the weight of the buoy, w, is onentrated in the
CHPTER 3 PROLEMS d SPRING-MSS-DMPER PPLICTIONS Proble 3.1 The buoy shown in figure P3.1 has a irular ross-setion with diaeter d and has length L. Most of the weight of the buoy, w, is onentrated in the
Intro Wb3303 Kineto-statics and Dynamics
 Wb333 Kineto-statis and Dynais 8 ineto-statis and Dynais...8. 8. Introdution...8. 8. Virtual wor and equilibriu equations (statis)...8.3 8.. General priniple...8.3 8.. Driving fores...8.5 8..3 Support
Wb333 Kineto-statis and Dynais 8 ineto-statis and Dynais...8. 8. Introdution...8. 8. Virtual wor and equilibriu equations (statis)...8.3 8.. General priniple...8.3 8.. Driving fores...8.5 8..3 Support
Analytical Analysis and Numerical Prediction of Seven DOF Human Vibratory Model for the Various Cars Driving Posture Swami Mahesh, Kosbe Pradnya
 ISSN: - ISO 9:8 Certified International Journal of Engineering and Innovative Tehnology (IJEIT) Volue, Issue, May Analytial Analysis and Nuerial Predition of Seven DOF Huan Vibratory Model for the Various
ISSN: - ISO 9:8 Certified International Journal of Engineering and Innovative Tehnology (IJEIT) Volue, Issue, May Analytial Analysis and Nuerial Predition of Seven DOF Huan Vibratory Model for the Various
x(t) y(t) c c F(t) F(t) EN40: Dynamics and Vibrations Homework 6: Forced Vibrations Due Friday April 5, 2018
 y(t) c c F(t) F(t) EN40: Dynamics and Vibrations Homework 6: Forced Vibrations Due Friday April 5, 2018") EN40: Dynais and Vibrations Hoewor 6: Fored Vibrations Due Friday April 5, 2018 Shool of Engineering Brown University 1. The vibration isolation syste shown in the figure has =20g, = 19.8 N / = 1.259 Ns
EN40: Dynais and Vibrations Hoewor 6: Fored Vibrations Due Friday April 5, 2018 Shool of Engineering Brown University 1. The vibration isolation syste shown in the figure has =20g, = 19.8 N / = 1.259 Ns
ANALELE UNIVERSITĂłII EFTIMIE MURGU REŞIłA ANUL XXI, NR. 1, 2014, ISSN Florin Bausic, Alexandru Cosmescu, Filip Gărdăreanu
 ANALELE UNIVERSITĂłII ETIMIE MURGU REŞIłA ANUL XXI, NR.,, ISSN 5-797 lorin Bausi, Aleandru Cosesu, ilip Gărdăreanu Stability Analysis for Hand-ar-forear Dynai Syste In this paper we propose a odel with
ANALELE UNIVERSITĂłII ETIMIE MURGU REŞIłA ANUL XXI, NR.,, ISSN 5-797 lorin Bausi, Aleandru Cosesu, ilip Gărdăreanu Stability Analysis for Hand-ar-forear Dynai Syste In this paper we propose a odel with
EN40: Dynamics and Vibrations. Final Examination Monday May : 2pm-5pm
 EN40: Dynaics and Vibrations Final Exaination Monday May 13 013: p-5p School of Engineering Brown University NAME: General Instructions No collaboration of any kind is peritted on this exaination. You
EN40: Dynaics and Vibrations Final Exaination Monday May 13 013: p-5p School of Engineering Brown University NAME: General Instructions No collaboration of any kind is peritted on this exaination. You
Part IA Paper 1: Mechanical Engineering MECHANICAL VIBRATIONS Examples paper 3
 ENGINEERING Part IA Paper 1: Mechanical Engineering MECHANICAL VIBRATIONS Exaples paper 3 IRST YEAR Straightforward questions are ared with a Tripos standard questions are ared *. Systes with two or ore
ENGINEERING Part IA Paper 1: Mechanical Engineering MECHANICAL VIBRATIONS Exaples paper 3 IRST YEAR Straightforward questions are ared with a Tripos standard questions are ared *. Systes with two or ore
CE573 Structural Dynamics [Fall 2008]
![CE573 Structural Dynamics [Fall 2008]](/thumbs/84/89476445.jpg "CE573 Structural Dynamics [Fall 2008]") CE573 Structural Dynaics [Fall 2008] 1) A rigid vehicle weighing 2000 lb, oving horizontally at a velocity of 12 ft/sec, is stopped by a barrier consisting of wire ropes stretched between two rigid anchors
CE573 Structural Dynaics [Fall 2008] 1) A rigid vehicle weighing 2000 lb, oving horizontally at a velocity of 12 ft/sec, is stopped by a barrier consisting of wire ropes stretched between two rigid anchors
Oscillations: Review (Chapter 12)
") Oscillations: Review (Chapter 1) Oscillations: otions that are periodic in tie (i.e. repetitive) o Swinging object (pendulu) o Vibrating object (spring, guitar string, etc.) o Part of ediu (i.e. string,
Oscillations: Review (Chapter 1) Oscillations: otions that are periodic in tie (i.e. repetitive) o Swinging object (pendulu) o Vibrating object (spring, guitar string, etc.) o Part of ediu (i.e. string,
Periodic Motion is everywhere
 Lecture 19 Goals: Chapter 14 Interrelate the physics and atheatics of oscillations. Draw and interpret oscillatory graphs. Learn the concepts of phase and phase constant. Understand and use energy conservation
Lecture 19 Goals: Chapter 14 Interrelate the physics and atheatics of oscillations. Draw and interpret oscillatory graphs. Learn the concepts of phase and phase constant. Understand and use energy conservation
Dynamics of Structures. Giacomo Boffi. Definitions. Dynamics of Structures. Giacomo Boffi. Introduction. Characteristics of a Dynamical Problem
 An to Dipartiento di Ingegneria Civile e Abientale, Politenio di Milano Part I Marh 1, 014 Definitions Definitions Let s start with soe definitions Dynais the branh of ehanis onerned with the effets of
An to Dipartiento di Ingegneria Civile e Abientale, Politenio di Milano Part I Marh 1, 014 Definitions Definitions Let s start with soe definitions Dynais the branh of ehanis onerned with the effets of
Professor, Department of Mechanical Engineering
 State Space Approach in Modelling Dr Bishakh Bhattacharya Professor, Departent of Mechanical Engineering IIT Kanpur Joint Initiative of IITs and IISc - Funded by MHRD Answer of the Last Assignent Following
State Space Approach in Modelling Dr Bishakh Bhattacharya Professor, Departent of Mechanical Engineering IIT Kanpur Joint Initiative of IITs and IISc - Funded by MHRD Answer of the Last Assignent Following
CHECKLIST. r r. Newton s Second Law. natural frequency ω o (rad.s -1 ) (Eq ) a03/p1/waves/waves doc 9:19 AM 29/03/05 1
 (Eq ) a03/p1/waves/waves doc 9:19 AM 29/03/05 1") PHYS12 Physics 1 FUNDAMENTALS Module 3 OSCILLATIONS & WAVES Text Physics by Hecht Chapter 1 OSCILLATIONS Sections: 1.5 1.6 Exaples: 1.6 1.7 1.8 1.9 CHECKLIST Haronic otion, periodic otion, siple haronic
PHYS12 Physics 1 FUNDAMENTALS Module 3 OSCILLATIONS & WAVES Text Physics by Hecht Chapter 1 OSCILLATIONS Sections: 1.5 1.6 Exaples: 1.6 1.7 1.8 1.9 CHECKLIST Haronic otion, periodic otion, siple haronic
Chapter 1: Basics of Vibrations for Simple Mechanical Systems
 Chapter 1: Basics of Vibrations for Siple Mechanical Systes Introduction: The fundaentals of Sound and Vibrations are part of the broader field of echanics, with strong connections to classical echanics,
Chapter 1: Basics of Vibrations for Siple Mechanical Systes Introduction: The fundaentals of Sound and Vibrations are part of the broader field of echanics, with strong connections to classical echanics,
Simple Harmonic Motion
 Siple Haronic Motion Physics Enhanceent Prograe for Gifted Students The Hong Kong Acadey for Gifted Education and Departent of Physics, HKBU Departent of Physics Siple haronic otion In echanical physics,
Siple Haronic Motion Physics Enhanceent Prograe for Gifted Students The Hong Kong Acadey for Gifted Education and Departent of Physics, HKBU Departent of Physics Siple haronic otion In echanical physics,
Simple and Compound Harmonic Motion
 Siple Copound Haronic Motion Prelab: visit this site: http://en.wiipedia.org/wii/noral_odes Purpose To deterine the noral ode frequencies of two systes:. a single ass - two springs syste (Figure );. two
Siple Copound Haronic Motion Prelab: visit this site: http://en.wiipedia.org/wii/noral_odes Purpose To deterine the noral ode frequencies of two systes:. a single ass - two springs syste (Figure );. two
(Newton s 2 nd Law for linear motion)
") PHYSICS 3 Final Exaination ( Deeber Tie liit 3 hours Answer all 6 questions You and an assistant are holding the (opposite ends of a long plank when oops! the butterfingered assistant drops his end If
PHYSICS 3 Final Exaination ( Deeber Tie liit 3 hours Answer all 6 questions You and an assistant are holding the (opposite ends of a long plank when oops! the butterfingered assistant drops his end If
8.1 Force Laws Hooke s Law
 8.1 Force Laws There are forces that don't change appreciably fro one instant to another, which we refer to as constant in tie, and forces that don't change appreciably fro one point to another, which
8.1 Force Laws There are forces that don't change appreciably fro one instant to another, which we refer to as constant in tie, and forces that don't change appreciably fro one point to another, which
A. Mitra 1, N. Benerjee 1, H. A. Khalane 2, M. A. Sonawane 2, D. R. Joshi 2, G.R. Bagul 2
 OSR Journal of Mechanical and ivil Engineering (OSR-JME) SSN(e) : 78-684, SSN(p) : 3 334X, PP : -33 www.iojournals.org Siulation and Analysis of Full ar Model for various Road profile on a analytically
OSR Journal of Mechanical and ivil Engineering (OSR-JME) SSN(e) : 78-684, SSN(p) : 3 334X, PP : -33 www.iojournals.org Siulation and Analysis of Full ar Model for various Road profile on a analytically
Simple Harmonic Motion of Spring
 Nae P Physics Date iple Haronic Motion and prings Hooean pring W x U ( x iple Haronic Motion of pring. What are the two criteria for siple haronic otion? - Only restoring forces cause siple haronic otion.
Nae P Physics Date iple Haronic Motion and prings Hooean pring W x U ( x iple Haronic Motion of pring. What are the two criteria for siple haronic otion? - Only restoring forces cause siple haronic otion.
TUTORIAL 1 SIMPLE HARMONIC MOTION. Instructor: Kazumi Tolich
 TUTORIAL 1 SIMPLE HARMONIC MOTION Instructor: Kazui Tolich About tutorials 2 Tutorials are conceptual exercises that should be worked on in groups. Each slide will consist of a series of questions that
TUTORIAL 1 SIMPLE HARMONIC MOTION Instructor: Kazui Tolich About tutorials 2 Tutorials are conceptual exercises that should be worked on in groups. Each slide will consist of a series of questions that
Chameleon mechanism. Lecture 2
 Chaeleon ehanis Leture Cosi aeleration Many independent data sets indiate that the expansion of the Universe is aelerating Siilar to preise tests of GR? Dark energy v Dark gravity Standard odel based on
Chaeleon ehanis Leture Cosi aeleration Many independent data sets indiate that the expansion of the Universe is aelerating Siilar to preise tests of GR? Dark energy v Dark gravity Standard odel based on
Modeling & Analysis of the International Space Station
 Modeling & Analysis of the International Space Station 1 Physical Syste Solar Alpha Rotary Joints Physical Syste Rotor Stator Gear Train Solar Array Inboard Body Outboard Body +x Solar Array 3 Physical
Modeling & Analysis of the International Space Station 1 Physical Syste Solar Alpha Rotary Joints Physical Syste Rotor Stator Gear Train Solar Array Inboard Body Outboard Body +x Solar Array 3 Physical
MAIN TOPICS iensional i l Analysis Bukingha Pi Theore eterination of Pi Ters Coents about iensional Analysis Coon iensionless Groups in Fluid Mehanis
 FUNAMENTALS OF FLUI MECHANICS Chapter 7 iensional Analysis Modeling, and Siilitude MAIN TOPICS iensional i l Analysis Bukingha Pi Theore eterination of Pi Ters Coents about iensional Analysis Coon iensionless
FUNAMENTALS OF FLUI MECHANICS Chapter 7 iensional Analysis Modeling, and Siilitude MAIN TOPICS iensional i l Analysis Bukingha Pi Theore eterination of Pi Ters Coents about iensional Analysis Coon iensionless
Kinetics of Rigid (Planar) Bodies
 Bodies") Kinetics of Rigi (Planar) Boies Types of otion Rectilinear translation Curvilinear translation Rotation about a fixe point eneral planar otion Kinetics of a Syste of Particles The center of ass for a syste
Kinetics of Rigi (Planar) Boies Types of otion Rectilinear translation Curvilinear translation Rotation about a fixe point eneral planar otion Kinetics of a Syste of Particles The center of ass for a syste
Optimization of the CBSMAP Queueing Model
 July 3-5 23 London UK Optiization of the CBSMAP Queueing Model Kondrashova EV Kashtanov VA Abstrat The present paper is devoted to the researh of ontrolled queueing odels at ontrol of CBSMAP-flow Controlled
July 3-5 23 London UK Optiization of the CBSMAP Queueing Model Kondrashova EV Kashtanov VA Abstrat The present paper is devoted to the researh of ontrolled queueing odels at ontrol of CBSMAP-flow Controlled
Chapter 2: Introduction to Damping in Free and Forced Vibrations
 Chapter 2: Introduction to Daping in Free and Forced Vibrations This chapter ainly deals with the effect of daping in two conditions like free and forced excitation of echanical systes. Daping plays an
Chapter 2: Introduction to Daping in Free and Forced Vibrations This chapter ainly deals with the effect of daping in two conditions like free and forced excitation of echanical systes. Daping plays an
and ζ in 1.1)? 1.2 What is the value of the magnification factor M for system A, (with force frequency ω = ωn
? 1.2 What is the value of the magnification factor M for system A, (with force frequency ω = ωn") EN40: Dynais and Vibrations Hoework 6: Fored Vibrations, Rigid Body Kineatis Due Friday April 7, 017 Shool of Engineering Brown University 1. Syste A in the figure is ritially daped. The aplitude of the
EN40: Dynais and Vibrations Hoework 6: Fored Vibrations, Rigid Body Kineatis Due Friday April 7, 017 Shool of Engineering Brown University 1. Syste A in the figure is ritially daped. The aplitude of the
TOPIC E: OSCILLATIONS SPRING 2018
 TOPIC E: OSCILLATIONS SPRING 018 1. Introduction 1.1 Overview 1. Degrees of freedo 1.3 Siple haronic otion. Undaped free oscillation.1 Generalised ass-spring syste: siple haronic otion. Natural frequency
TOPIC E: OSCILLATIONS SPRING 018 1. Introduction 1.1 Overview 1. Degrees of freedo 1.3 Siple haronic otion. Undaped free oscillation.1 Generalised ass-spring syste: siple haronic otion. Natural frequency
EN40: Dynamics and Vibrations. Final Examination Tuesday May 15, 2011
 EN40: ynaics and Vibrations Final Exaination Tuesday May 15, 011 School of Engineering rown University NME: General Instructions No collaboration of any ind is peritted on this exaination. You ay use double
EN40: ynaics and Vibrations Final Exaination Tuesday May 15, 011 School of Engineering rown University NME: General Instructions No collaboration of any ind is peritted on this exaination. You ay use double
Frame with 6 DOFs. v m. determining stiffness, k k = F / water tower deflected water tower dynamic response model
 CE 533, Fall 2014 Undaped SDOF Oscillator 1 / 6 What is a Single Degree of Freedo Oscillator? The siplest representation of the dynaic response of a civil engineering structure is the single degree of
CE 533, Fall 2014 Undaped SDOF Oscillator 1 / 6 What is a Single Degree of Freedo Oscillator? The siplest representation of the dynaic response of a civil engineering structure is the single degree of
PHYS 1443 Section 003 Lecture #22
 PHYS 443 Section 003 Lecture # Monda, Nov. 4, 003. Siple Bloc-Spring Sste. Energ of the Siple Haronic Oscillator 3. Pendulu Siple Pendulu Phsical Pendulu orsion Pendulu 4. Siple Haronic Motion and Unifor
PHYS 443 Section 003 Lecture # Monda, Nov. 4, 003. Siple Bloc-Spring Sste. Energ of the Siple Haronic Oscillator 3. Pendulu Siple Pendulu Phsical Pendulu orsion Pendulu 4. Siple Haronic Motion and Unifor
Physics 140 D100 Midterm Exam 2 Solutions 2017 Nov 10
 There are 10 ultiple choice questions. Select the correct answer for each one and ark it on the bubble for on the cover sheet. Each question has only one correct answer. (2 arks each) 1. An inertial reference
There are 10 ultiple choice questions. Select the correct answer for each one and ark it on the bubble for on the cover sheet. Each question has only one correct answer. (2 arks each) 1. An inertial reference
Simple Harmonic Motion
 Reading: Chapter 15 Siple Haronic Motion Siple Haronic Motion Frequency f Period T T 1. f Siple haronic otion x ( t) x cos( t ). Aplitude x Phase Angular frequency Since the otion returns to its initial
Reading: Chapter 15 Siple Haronic Motion Siple Haronic Motion Frequency f Period T T 1. f Siple haronic otion x ( t) x cos( t ). Aplitude x Phase Angular frequency Since the otion returns to its initial
Derivation of Non-Einsteinian Relativistic Equations from Momentum Conservation Law
 Asian Journal of Applied Siene and Engineering, Volue, No 1/13 ISSN 35-915X(p); 37-9584(e) Derivation of Non-Einsteinian Relativisti Equations fro Moentu Conservation Law M.O.G. Talukder Varendra University,
Asian Journal of Applied Siene and Engineering, Volue, No 1/13 ISSN 35-915X(p); 37-9584(e) Derivation of Non-Einsteinian Relativisti Equations fro Moentu Conservation Law M.O.G. Talukder Varendra University,
Tutorial Exercises: Incorporating constraints
 Tutorial Exercises: Incorporating constraints 1. A siple pendulu of length l ass is suspended fro a pivot of ass M that is free to slide on a frictionless wire frae in the shape of a parabola y = ax. The
Tutorial Exercises: Incorporating constraints 1. A siple pendulu of length l ass is suspended fro a pivot of ass M that is free to slide on a frictionless wire frae in the shape of a parabola y = ax. The
ACTIVE VIBRATION CONTROL FOR STRUCTURE HAVING NON- LINEAR BEHAVIOR UNDER EARTHQUAKE EXCITATION
 International onference on Earthquae Engineering and Disaster itigation, Jaarta, April 14-15, 8 ATIVE VIBRATION ONTROL FOR TRUTURE HAVING NON- LINEAR BEHAVIOR UNDER EARTHQUAE EXITATION Herlien D. etio
International onference on Earthquae Engineering and Disaster itigation, Jaarta, April 14-15, 8 ATIVE VIBRATION ONTROL FOR TRUTURE HAVING NON- LINEAR BEHAVIOR UNDER EARTHQUAE EXITATION Herlien D. etio
Analysis of ground vibration transmission in high precision equipment by Frequency Based Substructuring
 Analysis of ground vibration transission in high precision equipent by Frequency Based Substructuring G. van Schothorst 1, M.A. Boogaard 2, G.W. van der Poel 1, D.J. Rixen 2 1 Philips Innovation Services,
Analysis of ground vibration transission in high precision equipent by Frequency Based Substructuring G. van Schothorst 1, M.A. Boogaard 2, G.W. van der Poel 1, D.J. Rixen 2 1 Philips Innovation Services,
PY241 Solutions Set 9 (Dated: November 7, 2002)
") PY241 Solutions Set 9 (Dated: Noveber 7, 2002) 9-9 At what displaceent of an object undergoing siple haronic otion is the agnitude greatest for the... (a) velocity? The velocity is greatest at x = 0, the
PY241 Solutions Set 9 (Dated: Noveber 7, 2002) 9-9 At what displaceent of an object undergoing siple haronic otion is the agnitude greatest for the... (a) velocity? The velocity is greatest at x = 0, the
Question 1. [14 Marks]
![Question 1. [14 Marks]](/thumbs/88/116022373.jpg "Question 1. [14 Marks]") 6 Question 1. [14 Marks] R r T! A string is attached to the dru (radius r) of a spool (radius R) as shown in side and end views here. (A spool is device for storing string, thread etc.) A tension T is
6 Question 1. [14 Marks] R r T! A string is attached to the dru (radius r) of a spool (radius R) as shown in side and end views here. (A spool is device for storing string, thread etc.) A tension T is
EN40: Dynamics and Vibrations. Midterm Examination Tuesday March
 EN4: Dynaics and Vibrations Midter Exaination Tuesday March 8 16 School of Engineering Brown University NAME: General Instructions No collaboration of any kind is peritted on this exaination. You ay bring
EN4: Dynaics and Vibrations Midter Exaination Tuesday March 8 16 School of Engineering Brown University NAME: General Instructions No collaboration of any kind is peritted on this exaination. You ay bring
1 (40) Gravitational Systems Two heavy spherical (radius 0.05R) objects are located at fixed positions along
 Gravitational Systems Two heavy spherical (radius 0.05R) objects are located at fixed positions along") (40) Gravitational Systes Two heavy spherical (radius 0.05) objects are located at fixed positions along 2M 2M 0 an axis in space. The first ass is centered at r = 0 and has a ass of 2M. The second ass
(40) Gravitational Systes Two heavy spherical (radius 0.05) objects are located at fixed positions along 2M 2M 0 an axis in space. The first ass is centered at r = 0 and has a ass of 2M. The second ass
Optimal sliding mode control of the pendubot
 International Researh Journal of Coputer Siene and Inforation Systes (IRJCSIS Vol. ( pp. 45-5, April, Available online http://www.interesjournals.org/irjcsis Copyright International Researh Journals Full
International Researh Journal of Coputer Siene and Inforation Systes (IRJCSIS Vol. ( pp. 45-5, April, Available online http://www.interesjournals.org/irjcsis Copyright International Researh Journals Full
Kinematics of Elastic Neutron Scattering
 .05 Reator Physis - Part Fourteen Kineatis of Elasti Neutron Sattering. Multi-Group Theory: The next ethod that we will study for reator analysis and design is ulti-group theory. This approah entails dividing
.05 Reator Physis - Part Fourteen Kineatis of Elasti Neutron Sattering. Multi-Group Theory: The next ethod that we will study for reator analysis and design is ulti-group theory. This approah entails dividing
Problem Set 14: Oscillations AP Physics C Supplementary Problems
 Proble Set 14: Oscillations AP Physics C Suppleentary Probles 1 An oscillator consists of a bloc of ass 050 g connected to a spring When set into oscillation with aplitude 35 c, it is observed to repeat
Proble Set 14: Oscillations AP Physics C Suppleentary Probles 1 An oscillator consists of a bloc of ass 050 g connected to a spring When set into oscillation with aplitude 35 c, it is observed to repeat
Systems of Masses. 1. Ignoring friction, calculate the acceleration of the system below and the tension in the rope. and (4.0)(9.80) 39.
(9.80) 39.") Systes of Masses. Ignoring friction, calculate the acceleration of the syste below and the tension in the rope. Drawing individual free body diagras we get 4.0kg 7.0kg g 9.80 / s a?? g and g (4.0)(9.80)
Systes of Masses. Ignoring friction, calculate the acceleration of the syste below and the tension in the rope. Drawing individual free body diagras we get 4.0kg 7.0kg g 9.80 / s a?? g and g (4.0)(9.80)
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering 2.010: Systems Modeling and Dynamics III. Final Examination Review Problems
 ASSACHUSETTS INSTITUTE OF TECHNOLOGY Departent of echanical Engineering 2.010: Systes odeling and Dynaics III Final Eaination Review Probles Fall 2000 Good Luck And have a great winter break! page 1 Proble
ASSACHUSETTS INSTITUTE OF TECHNOLOGY Departent of echanical Engineering 2.010: Systes odeling and Dynaics III Final Eaination Review Probles Fall 2000 Good Luck And have a great winter break! page 1 Proble
Lecture 4 Normal Modes
 Lecture 4 Noral Modes Coupled driven oscillators Double pendulu The daped driven pendulu = g/l +k y+fcost y = y gy/l k y d dt + d dt + g + k l k k d dt + d dt + g + k l y = F 0 Re eit y =Re X Y eit CF
Lecture 4 Noral Modes Coupled driven oscillators Double pendulu The daped driven pendulu = g/l +k y+fcost y = y gy/l k y d dt + d dt + g + k l k k d dt + d dt + g + k l y = F 0 Re eit y =Re X Y eit CF
Systems of Linear First Order Ordinary Differential Equations Example Problems
 Systes of Linear First Order Ordinary Differential Equations Eaple Probles David Keffer Departent of Cheial Engineering University of Tennessee Knoville, TN 79 Last Updated: Septeber 4, Eaple. Transient
Systes of Linear First Order Ordinary Differential Equations Eaple Probles David Keffer Departent of Cheial Engineering University of Tennessee Knoville, TN 79 Last Updated: Septeber 4, Eaple. Transient
27 Oscillations: Introduction, Mass on a Spring
 Chapter 7 Oscillations: Introduction, Mass on a Spring 7 Oscillations: Introduction, Mass on a Spring If a siple haronic oscillation proble does not involve the tie, you should probably be using conservation
Chapter 7 Oscillations: Introduction, Mass on a Spring 7 Oscillations: Introduction, Mass on a Spring If a siple haronic oscillation proble does not involve the tie, you should probably be using conservation
Physics 41 HW Set 1 Chapter 15 Serway 7 th Edition
 Physics HW Set Chapter 5 Serway 7 th Edition Conceptual Questions:, 3, 5,, 6, 9 Q53 You can take φ = π, or equally well, φ = π At t= 0, the particle is at its turning point on the negative side of equilibriu,
Physics HW Set Chapter 5 Serway 7 th Edition Conceptual Questions:, 3, 5,, 6, 9 Q53 You can take φ = π, or equally well, φ = π At t= 0, the particle is at its turning point on the negative side of equilibriu,
NAME NUMBER SEC. PHYCS 101 SUMMER 2001/2002 FINAL EXAME:24/8/2002. PART(I) 25% PART(II) 15% PART(III)/Lab 8% ( ) 2 Q2 Q3 Total 40%
 25% PART(II) 15% PART(III)/Lab 8% ( ) 2 Q2 Q3 Total 40%") NAME NUMER SEC. PHYCS 101 SUMMER 2001/2002 FINAL EXAME:24/8/2002 PART(I) 25% PART(II) 15% PART(III)/Lab 8% ( ) 2.5 Q1 ( ) 2 Q2 Q3 Total 40% Use the followings: Magnitude of acceleration due to gravity
NAME NUMER SEC. PHYCS 101 SUMMER 2001/2002 FINAL EXAME:24/8/2002 PART(I) 25% PART(II) 15% PART(III)/Lab 8% ( ) 2.5 Q1 ( ) 2 Q2 Q3 Total 40% Use the followings: Magnitude of acceleration due to gravity
Chapter 11: Vibration Isolation of the Source [Part I]
![Chapter 11: Vibration Isolation of the Source [Part I]](/thumbs/89/99791370.jpg "Chapter 11: Vibration Isolation of the Source [Part I]") Chapter : Vibration Isolation of the Source [Part I] Eaple 3.4 Consider the achine arrangeent illustrated in figure 3.. An electric otor is elastically ounted, by way of identical isolators, to a - thick
Chapter : Vibration Isolation of the Source [Part I] Eaple 3.4 Consider the achine arrangeent illustrated in figure 3.. An electric otor is elastically ounted, by way of identical isolators, to a - thick
EFFECTIVE MODAL MASS & MODAL PARTICIPATION FACTORS Revision I
 EFFECTIVE MODA MASS & MODA PARTICIPATION FACTORS Revision I B To Irvine Eail: to@vibrationdata.co Deceber, 5 Introduction The effective odal ass provides a ethod for judging the significance of a vibration
EFFECTIVE MODA MASS & MODA PARTICIPATION FACTORS Revision I B To Irvine Eail: to@vibrationdata.co Deceber, 5 Introduction The effective odal ass provides a ethod for judging the significance of a vibration
Modular Control of a Rotary Inverted Pendulum System
 Paper ID #14582 Modular Control of a Rotary Inverted Pendulu Syste Dr. Xiuin Diao, Purdue University Xiuin Diao received his B.S. degree in Mechanical Design and Manufacturing fro Yantai University, China,
Paper ID #14582 Modular Control of a Rotary Inverted Pendulu Syste Dr. Xiuin Diao, Purdue University Xiuin Diao received his B.S. degree in Mechanical Design and Manufacturing fro Yantai University, China,
Actuators & Mechanisms Actuator sizing
 Course Code: MDP 454, Course Nae:, Second Seester 2014 Actuators & Mechaniss Actuator sizing Contents - Modelling of Mechanical Syste - Mechaniss and Drives The study of Mechatronics systes can be divided
Course Code: MDP 454, Course Nae:, Second Seester 2014 Actuators & Mechaniss Actuator sizing Contents - Modelling of Mechanical Syste - Mechaniss and Drives The study of Mechatronics systes can be divided
Energy and Momentum: The Ballistic Pendulum
 Physics Departent Handout -10 Energy and Moentu: The Ballistic Pendulu The ballistic pendulu, first described in the id-eighteenth century, applies principles of echanics to the proble of easuring the
Physics Departent Handout -10 Energy and Moentu: The Ballistic Pendulu The ballistic pendulu, first described in the id-eighteenth century, applies principles of echanics to the proble of easuring the
= T. Oscillations and Waves. Example of an Oscillating System IB 12 IB 12
 Oscillation: the vibration of an object Oscillations and Waves Eaple of an Oscillating Syste A ass oscillates on a horizontal spring without friction as shown below. At each position, analyze its displaceent,
Oscillation: the vibration of an object Oscillations and Waves Eaple of an Oscillating Syste A ass oscillates on a horizontal spring without friction as shown below. At each position, analyze its displaceent,
Uniaxial Concrete Material Behavior
 COMPUTERS AND STRUCTURES, INC., JULY 215 TECHNICAL NOTE MODIFIED DARWIN-PECKNOLD 2-D REINFORCED CONCRETE MATERIAL MODEL Overview This tehnial note desribes the Modified Darwin-Peknold reinfored onrete
COMPUTERS AND STRUCTURES, INC., JULY 215 TECHNICAL NOTE MODIFIED DARWIN-PECKNOLD 2-D REINFORCED CONCRETE MATERIAL MODEL Overview This tehnial note desribes the Modified Darwin-Peknold reinfored onrete
THE INFLUENCE OF FORCED STEERING VIBRATIONS ON A WHEEL AND DYNAMIC EFFECT OF A WHEEL WITH ABS BRAKING ON UNDULATED ROAD I
 The 3rd International Conference on Coputational Mechanics and Virtual Engineering COMEC 009 9 30 OCTOBER 009, Brasov, Roania THE INFLUENCE OF FORCED STEERING VIBRATIONS ON A WHEEL AND DYNAMIC EFFECT OF
The 3rd International Conference on Coputational Mechanics and Virtual Engineering COMEC 009 9 30 OCTOBER 009, Brasov, Roania THE INFLUENCE OF FORCED STEERING VIBRATIONS ON A WHEEL AND DYNAMIC EFFECT OF
9. h = R. 10. h = 3 R
 Version PREVIEW Torque Chap. 8 sizeore (13756) 1 This print-out should have 3 questions. ultiple-choice questions ay continue on the next colun or page find all choices before answering. Note in the dropped
Version PREVIEW Torque Chap. 8 sizeore (13756) 1 This print-out should have 3 questions. ultiple-choice questions ay continue on the next colun or page find all choices before answering. Note in the dropped
MECHANICS OF MATERIALS Design of a Transmission Shaft
 Design of a Transission Shaft If power is transferred to and fro the shaft by ygears or sprocket wheels, the shaft is subjected to transverse loading as well as shear loading. Noral stresses due to transverse
Design of a Transission Shaft If power is transferred to and fro the shaft by ygears or sprocket wheels, the shaft is subjected to transverse loading as well as shear loading. Noral stresses due to transverse
' ' , and z ' components ( u u u'
 Mesosale Meteorology: Gravity Waves 3 April 07 Introdution Here, we priarily onsider internal gravity waves, or waves that propagate in a density-stratified fluid (noinally, a stably-stratified fluid,
Mesosale Meteorology: Gravity Waves 3 April 07 Introdution Here, we priarily onsider internal gravity waves, or waves that propagate in a density-stratified fluid (noinally, a stably-stratified fluid,
For a situation involving gravity near earth s surface, a = g = jg. Show. that for that case v 2 = v 0 2 g(y y 0 ).
.") Reading: Energy 1, 2. Key concepts: Scalar products, work, kinetic energy, work-energy theore; potential energy, total energy, conservation of echanical energy, equilibriu and turning points. 1.! In 1-D
Reading: Energy 1, 2. Key concepts: Scalar products, work, kinetic energy, work-energy theore; potential energy, total energy, conservation of echanical energy, equilibriu and turning points. 1.! In 1-D
Chapter 5, Conceptual Questions
 Chapter 5, Conceptual Questions 5.1. Two forces are present, tension T in the cable and gravitational force 5.. F G as seen in the figure. Four forces act on the block: the push of the spring F, sp gravitational
Chapter 5, Conceptual Questions 5.1. Two forces are present, tension T in the cable and gravitational force 5.. F G as seen in the figure. Four forces act on the block: the push of the spring F, sp gravitational
Monitoring and system identification of suspension bridges: An alternative approach
 Monitoring and syste identification of suspension bridges: An alternative approach Erdal Şafak Boğaziçi University, Kandilli Observatory and Earthquake Reseach Institute, Istanbul, Turkey Abstract This
Monitoring and syste identification of suspension bridges: An alternative approach Erdal Şafak Boğaziçi University, Kandilli Observatory and Earthquake Reseach Institute, Istanbul, Turkey Abstract This
Physics 207 Lecture 18. Physics 207, Lecture 18, Nov. 3 Goals: Chapter 14
 Physics 07, Lecture 18, Nov. 3 Goals: Chapter 14 Interrelate the physics and atheatics of oscillations. Draw and interpret oscillatory graphs. Learn the concepts of phase and phase constant. Understand
Physics 07, Lecture 18, Nov. 3 Goals: Chapter 14 Interrelate the physics and atheatics of oscillations. Draw and interpret oscillatory graphs. Learn the concepts of phase and phase constant. Understand
CHAPTER 15: Vibratory Motion
 CHAPTER 15: Vibratory Motion courtesy of Richard White courtesy of Richard White 2.) 1.) Two glaring observations can be ade fro the graphic on the previous slide: 1.) The PROJECTION of a point on a circle
CHAPTER 15: Vibratory Motion courtesy of Richard White courtesy of Richard White 2.) 1.) Two glaring observations can be ade fro the graphic on the previous slide: 1.) The PROJECTION of a point on a circle
In the session you will be divided into groups and perform four separate experiments:
 Mechanics Lab (Civil Engineers) Nae (please print): Tutor (please print): Lab group: Date of lab: Experients In the session you will be divided into groups and perfor four separate experients: (1) air-track
Mechanics Lab (Civil Engineers) Nae (please print): Tutor (please print): Lab group: Date of lab: Experients In the session you will be divided into groups and perfor four separate experients: (1) air-track
2.003 Engineering Dynamics Problem Set 2 Solutions
 .003 Engineering Dynaics Proble Set Solutions This proble set is priarily eant to give the student practice in describing otion. This is the subject of kineatics. It is strongly recoended that you study
.003 Engineering Dynaics Proble Set Solutions This proble set is priarily eant to give the student practice in describing otion. This is the subject of kineatics. It is strongly recoended that you study
+ 1 2 mv 2. Since no forces act on the system in the x-direction, linear momentum in x-direction is conserved: (2) 0 = mv A2. + Rω 2.
 0 = mv A2. + Rω 2.") ME 74 Spring 018 Final Exaination Proble 1 Given: hoogeneous dis of ass and outer radius R is able to roll without slipping on the curved upper surface of a cart. art (of ass ) is able to ove along a sooth,
ME 74 Spring 018 Final Exaination Proble 1 Given: hoogeneous dis of ass and outer radius R is able to roll without slipping on the curved upper surface of a cart. art (of ass ) is able to ove along a sooth,
Physics 2107 Oscillations using Springs Experiment 2
 PY07 Oscillations using Springs Experient Physics 07 Oscillations using Springs Experient Prelab Read the following bacground/setup and ensure you are failiar with the concepts and theory required for
PY07 Oscillations using Springs Experient Physics 07 Oscillations using Springs Experient Prelab Read the following bacground/setup and ensure you are failiar with the concepts and theory required for
ME Machine Design I. FINAL EXAM. OPEN BOOK AND CLOSED NOTES. Friday, May 8th, 2009
 ME 5 - Machine Design I Spring Seester 009 Nae Lab. Div. FINAL EXAM. OPEN BOOK AND LOSED NOTES. Friday, May 8th, 009 Please use the blank paper for your solutions. Write on one side of the paper only.
ME 5 - Machine Design I Spring Seester 009 Nae Lab. Div. FINAL EXAM. OPEN BOOK AND LOSED NOTES. Friday, May 8th, 009 Please use the blank paper for your solutions. Write on one side of the paper only.
Moment of inertia and torsional vibrations (Item No.: P )
") Moent of inertia and torsional vibrations (Ite No.: P2133100) Curricular Relevance Area of Expertise: Physics Education Level: University Topic: Mechanics Subtopic: Static Equilibriu and Elasticity Experient:
Moent of inertia and torsional vibrations (Ite No.: P2133100) Curricular Relevance Area of Expertise: Physics Education Level: University Topic: Mechanics Subtopic: Static Equilibriu and Elasticity Experient:
SHM stuff the story continues
 SHM stuff the story continues Siple haronic Motion && + ω solution A cos t ( ω + α ) Siple haronic Motion + viscous daping b & + ω & + Viscous daping force A e b t Viscous daped aplitude Viscous daped
SHM stuff the story continues Siple haronic Motion && + ω solution A cos t ( ω + α ) Siple haronic Motion + viscous daping b & + ω & + Viscous daping force A e b t Viscous daped aplitude Viscous daped
Particle dynamics Physics 1A, UNSW
 1 Particle dynaics Physics 1A, UNSW Newton's laws: S & J: Ch 5.1 5.9, 6.1 force, ass, acceleration also weight Physclips Chapter 5 Friction - coefficients of friction Physclips Chapter 6 Hooke's Law Dynaics
1 Particle dynaics Physics 1A, UNSW Newton's laws: S & J: Ch 5.1 5.9, 6.1 force, ass, acceleration also weight Physclips Chapter 5 Friction - coefficients of friction Physclips Chapter 6 Hooke's Law Dynaics
Chapter 5. Vibrations
 Chapter 5 Vibrations 5.1 Overview of Vibrations 5.1.1 Exaples of practical vibration probles Vibration is a continuous cyclic otion of a structure or a coponent. Generally, engineers try to avoid vibrations,
Chapter 5 Vibrations 5.1 Overview of Vibrations 5.1.1 Exaples of practical vibration probles Vibration is a continuous cyclic otion of a structure or a coponent. Generally, engineers try to avoid vibrations,
Question number 1 to 8 carries 2 marks each, 9 to 16 carries 4 marks each and 17 to 18 carries 6 marks each.
 IIT-JEE5-PH-1 FIITJEE Solutions to IITJEE 5 Mains Paper Tie: hours Physics Note: Question nuber 1 to 8 carries arks each, 9 to 16 carries 4 arks each and 17 to 18 carries 6 arks each. Q1. whistling train
IIT-JEE5-PH-1 FIITJEE Solutions to IITJEE 5 Mains Paper Tie: hours Physics Note: Question nuber 1 to 8 carries arks each, 9 to 16 carries 4 arks each and 17 to 18 carries 6 arks each. Q1. whistling train
System Modeling and Control of a Clutch Actuator System for Dual Clutch Transmissions
 Syste Modeling and Control of a Clutch Actuator Syste for Dual Clutch Transissions Jinsung Ki *) Seibu B. Choi ) Heerak Lee ) Jiwoo Kang ) Mandae Hur ) ) Departent of Mechanical Engineering, KAIST, 9 Daehak-ro,
Syste Modeling and Control of a Clutch Actuator Syste for Dual Clutch Transissions Jinsung Ki *) Seibu B. Choi ) Heerak Lee ) Jiwoo Kang ) Mandae Hur ) ) Departent of Mechanical Engineering, KAIST, 9 Daehak-ro,
Physics (Theory) There are 30 questions in total. Question Nos. 1 to 8 are very short answer type questions and carry one mark each.
 There are 30 questions in total. Question Nos. 1 to 8 are very short answer type questions and carry one mark each.") Physis (Theory) Tie allowed: 3 hours] [Maxiu arks:7 General Instrutions: (i) ll uestions are opulsory. (ii) (iii) (iii) (iv) (v) There are 3 uestions in total. Question Nos. to 8 are very short answer
Physis (Theory) Tie allowed: 3 hours] [Maxiu arks:7 General Instrutions: (i) ll uestions are opulsory. (ii) (iii) (iii) (iv) (v) There are 3 uestions in total. Question Nos. to 8 are very short answer
Shear Force and Bending Moment
 Shear Fore and Bending oent Shear Fore: is the algebrai su of the vertial fores ating to the left or right of a ut setion along the span of the bea Bending oent: is the algebrai su of the oent of the fores
Shear Fore and Bending oent Shear Fore: is the algebrai su of the vertial fores ating to the left or right of a ut setion along the span of the bea Bending oent: is the algebrai su of the oent of the fores
m A 1 m mgd k m v ( C) AP Physics Multiple Choice Practice Oscillations
 AP Physics Multiple Choice Practice Oscillations") P Physics Multiple Choice Practice Oscillations. ass, attached to a horizontal assless spring with spring constant, is set into siple haronic otion. Its axiu displaceent fro its equilibriu position is.
P Physics Multiple Choice Practice Oscillations. ass, attached to a horizontal assless spring with spring constant, is set into siple haronic otion. Its axiu displaceent fro its equilibriu position is.
Chapter 28 Special Relativity
 Galilean Relatiity Chapter 8 Speial Relatiity A passenger in an airplane throws a ball straight up. It appears to oe in a ertial path. The law of graity and equations of otion under unifor aeleration are
Galilean Relatiity Chapter 8 Speial Relatiity A passenger in an airplane throws a ball straight up. It appears to oe in a ertial path. The law of graity and equations of otion under unifor aeleration are
PHYSICS - CLUTCH CH 05: FRICTION, INCLINES, SYSTEMS.
 !! www.clutchprep.co INTRO TO FRICTION Friction happens when two surfaces are in contact f = μ =. KINETIC FRICTION (v 0 *): STATIC FRICTION (v 0 *): - Happens when ANY object slides/skids/slips. * = Point
!! www.clutchprep.co INTRO TO FRICTION Friction happens when two surfaces are in contact f = μ =. KINETIC FRICTION (v 0 *): STATIC FRICTION (v 0 *): - Happens when ANY object slides/skids/slips. * = Point
Torsion Experiment. Encoder #3 ( 3 ) Third encoder/disk for Model 205a only. Figure 1: ECP Torsion Experiment
 Third encoder/disk for Model 205a only. Figure 1: ECP Torsion Experiment") Torsion Experient Introduction For the Torsion lab, there are two required experients to perfor and one extra credit assignent at the end. In experient 1, the syste paraeters need to be identified so that
Torsion Experient Introduction For the Torsion lab, there are two required experients to perfor and one extra credit assignent at the end. In experient 1, the syste paraeters need to be identified so that
Nonlinear Control of Full-Vehicle Active Suspensions with Backstepping Design Scheme
 Proceedings of the 7th World Congress The International Federation of Autoatic Control Nonlinear Control of Full-Vehicle Active Suspensions with Backstepping Design Schee Jia-Wei Hu Jung-Shan Lin Departent
Proceedings of the 7th World Congress The International Federation of Autoatic Control Nonlinear Control of Full-Vehicle Active Suspensions with Backstepping Design Schee Jia-Wei Hu Jung-Shan Lin Departent
Chapter 11 Simple Harmonic Motion
 Chapter 11 Siple Haronic Motion "We are to adit no ore causes of natural things than such as are both true and sufficient to explain their appearances." Isaac Newton 11.1 Introduction to Periodic Motion
Chapter 11 Siple Haronic Motion "We are to adit no ore causes of natural things than such as are both true and sufficient to explain their appearances." Isaac Newton 11.1 Introduction to Periodic Motion
Force and dynamics with a spring, analytic approach
 Force and dynaics with a spring, analytic approach It ay strie you as strange that the first force we will discuss will be that of a spring. It is not one of the four Universal forces and we don t use
Force and dynaics with a spring, analytic approach It ay strie you as strange that the first force we will discuss will be that of a spring. It is not one of the four Universal forces and we don t use
Physics 4A Solutions to Chapter 15 Homework
 Physics 4A Solutions to Chapter 15 Hoework Chapter 15 Questions:, 8, 1 Exercises & Probles 6, 5, 31, 41, 59, 7, 73, 88, 90 Answers to Questions: Q 15- (a) toward -x (b) toward +x (c) between -x and 0 (d)
Physics 4A Solutions to Chapter 15 Hoework Chapter 15 Questions:, 8, 1 Exercises & Probles 6, 5, 31, 41, 59, 7, 73, 88, 90 Answers to Questions: Q 15- (a) toward -x (b) toward +x (c) between -x and 0 (d)
Physics with Health Science Applications Ch. 3 pg. 56
 Physics with Health Science Applications Ch. 3 pg. 56 Questions 3.4 The plane is accelerating forward. The seat is connected to the plane and is accelerated forward. The back of the seat applies a forward
Physics with Health Science Applications Ch. 3 pg. 56 Questions 3.4 The plane is accelerating forward. The seat is connected to the plane and is accelerated forward. The back of the seat applies a forward
International Journal of Thermodynamics, Vol. 18, No. 1, P (2015). Sergey G.
. Sergey G.") International Journal of Therodynais Vol. 8 No. P. 3-4 (5). http://dx.doi.org/.554/ijot.5343 Four-diensional equation of otion for visous opressible and harged fluid with regard to the aeleration field
International Journal of Therodynais Vol. 8 No. P. 3-4 (5). http://dx.doi.org/.554/ijot.5343 Four-diensional equation of otion for visous opressible and harged fluid with regard to the aeleration field
Research on coupling theory and its experiments between torque turbulence and bearing load of multi-support-rotor systems
 Available online www.jocpr.co Journal of Cheical and Pharaceutical Research, 04, 6(4):807-85 Research Article ISSN : 0975-7384 CODEN(USA) : JCPRC5 Research on coupling theory and its experients between
Available online www.jocpr.co Journal of Cheical and Pharaceutical Research, 04, 6(4):807-85 Research Article ISSN : 0975-7384 CODEN(USA) : JCPRC5 Research on coupling theory and its experients between
RELATIVISTIC GRAVITY AND THE ORIGIN OF INERTIA AND INERTIAL MASS
 RELTIVISTIC GRVITY ND THE ORIGIN OF INERTI ND INERTIL MSS K Tsarouhas To ite this version: K Tsarouhas. RELTIVISTIC GRVITY ND THE ORIGIN OF INERTI ND INERTIL MSS. 07. HL Id: hal-047498 https://hal.arhives-ouvertes.fr/hal-047498
RELTIVISTIC GRVITY ND THE ORIGIN OF INERTI ND INERTIL MSS K Tsarouhas To ite this version: K Tsarouhas. RELTIVISTIC GRVITY ND THE ORIGIN OF INERTI ND INERTIL MSS. 07. HL Id: hal-047498 https://hal.arhives-ouvertes.fr/hal-047498
SIMPLE HARMONIC MOTION: NEWTON S LAW
 SIMPLE HARMONIC MOTION: NEWTON S LAW siple not siple PRIOR READING: Main 1.1, 2.1 Taylor 5.1, 5.2 http://www.yoops.org/twocw/it/nr/rdonlyres/physics/8-012fall-2005/7cce46ac-405d-4652-a724-64f831e70388/0/chp_physi_pndul.jpg
SIMPLE HARMONIC MOTION: NEWTON S LAW siple not siple PRIOR READING: Main 1.1, 2.1 Taylor 5.1, 5.2 http://www.yoops.org/twocw/it/nr/rdonlyres/physics/8-012fall-2005/7cce46ac-405d-4652-a724-64f831e70388/0/chp_physi_pndul.jpg
Physics 201 Lecture 29
 Phsics 1 ecture 9 Goals ecture 9 v Describe oscillator otion in a siple pendulu v Describe oscillator otion with torques v Introduce daping in SHM v Discuss resonance v Final Ea Details l Sunda, Ma 13th
Phsics 1 ecture 9 Goals ecture 9 v Describe oscillator otion in a siple pendulu v Describe oscillator otion with torques v Introduce daping in SHM v Discuss resonance v Final Ea Details l Sunda, Ma 13th
Minimum value of C Number of Vehicles in Platoon
 Preprints of the 8th IFAC/IFIP/IFORS Syposiu on Transportation Systes, Chania, Greee, June 1997, pp. 69{74. STRING STABILITY PROPERTIES OF AHS LONGITUDINAL VEHICLE CONTROLLERS Jennifer Eyre Diana Yanaiev
Preprints of the 8th IFAC/IFIP/IFORS Syposiu on Transportation Systes, Chania, Greee, June 1997, pp. 69{74. STRING STABILITY PROPERTIES OF AHS LONGITUDINAL VEHICLE CONTROLLERS Jennifer Eyre Diana Yanaiev
Physics 2210 Fall smartphysics 20 Conservation of Angular Momentum 21 Simple Harmonic Motion 11/23/2015
 Physics 2210 Fall 2015 sartphysics 20 Conservation of Angular Moentu 21 Siple Haronic Motion 11/23/2015 Exa 4: sartphysics units 14-20 Midter Exa 2: Day: Fri Dec. 04, 2015 Tie: regular class tie Section
Physics 2210 Fall 2015 sartphysics 20 Conservation of Angular Moentu 21 Siple Haronic Motion 11/23/2015 Exa 4: sartphysics units 14-20 Midter Exa 2: Day: Fri Dec. 04, 2015 Tie: regular class tie Section
26 Impulse and Momentum
 6 Ipulse and Moentu First, a Few More Words on Work and Energy, for Coparison Purposes Iagine a gigantic air hockey table with a whole bunch of pucks of various asses, none of which experiences any friction
6 Ipulse and Moentu First, a Few More Words on Work and Energy, for Coparison Purposes Iagine a gigantic air hockey table with a whole bunch of pucks of various asses, none of which experiences any friction
Modern Control Systems (ECEG-4601) Instructor: Andinet Negash. Chapter 1 Lecture 3: State Space, II
 Instructor: Andinet Negash. Chapter 1 Lecture 3: State Space, II") Modern Control Systes (ECEG-46) Instructor: Andinet Negash Chapter Lecture 3: State Space, II Eaples Eaple 5: control o liquid levels: in cheical plants, it is oten necessary to aintain the levels o liquids.
Modern Control Systes (ECEG-46) Instructor: Andinet Negash Chapter Lecture 3: State Space, II Eaples Eaple 5: control o liquid levels: in cheical plants, it is oten necessary to aintain the levels o liquids.