Modeling Friction and Contact in Chrono. Theoretical Background
|
|
|
- Nickolas Dickerson
- 6 years ago
- Views:
Transcription

1 Modeling Friction and Contact in Chrono Theoretical Background
2 Things Covered Friction and contact, understanding the problem at hand The penalty approach The complementarity approach 2

3 Mass Acceleration = Force 3
4 Mass Acceleration = Force Coulomb friction coefficient Reflect on this: friction force can assume a bunch of values (as long as they re smaller than Nthough) 4

5 5

6 Additive Manufacturing (3D SLS Printing) Courtesy of Professor Tim Osswald, Polymer Engineering Center, UW Madison 6
7 Two main approaches: penalty & complementarity Problem Computational many body dynamics Handling frictional contact Modelling approach Penalty based approach Complementarity approach Numerical techniques Collision detection Optimization techniques 7
8 General Comments, Penalty Approach Approach commonly used in handling granular material Called Discrete Element Method The Penalty approach works well for sphere to sphere and sphere to plane scenarios Deformable body mechanics used to characterize what happens under these scenarios Standard reference: K. L. Johnson, Contact Mechanics, University Press, Cambridge, Methodology subsequently grafted to general dynamics problem of rigid bodies arbitrary geometry When they collide, a fictitious spring damper element is placed between the two bodies Sometimes spring & damping coefficient based on continuum theory mentioned above Sometimes values are guessed (calibration) based on experimental data 8
9 The Penalty Method, Taxonomy Depending on the normal relative velocity between bodies that experience a collision and their material properties, if there is no relative angular velocity, the collision is Elastic, if the contact induced deformation is reversible and independent of displacement rate Viscoelastic, if the contact induced deformation is irreversible, but the deformation is dependent on the displacement rate Plastic, if collision leaves an involved body permanently deformed but the deformation of body is independent of the displacement rate Viscoplastic, if impact is irreversible and similar to the viscoelastic contact but deformation depends on the displacement rate According to the dependency of the normal force on the overlap and the displacement rate, the force schemes can be subdivided into Continuous potential models (like Lennard Jones, for instance) Linear viscoelastic models (simple, used extensively, what we use here) Non linear viscoelastic models Hysteretic models (see papers of L. Vu Quoc, in DEM Further Reading slide) 9
10 The Penalty Method in Chrono, Nuts and Bolts Method relies on a record (history) of tangential displacement to model static friction (see figure at right) 10

11 The Penalty Method in Chrono, Nuts and Bolts Visualize this as creep. eff eff eff eff If then scale so that 11

 Void Ratio (dense packing): e = 0.4 [J.")
12 Direct Shear Analysis via Granular Dynamics [using LAMMPS/LIGGGHTS and Chrono] 1800 uniform spheres randomly packed Particle Diameter: D = 5 mm Shear Speed: 1 mm/s Inter Particle Coulomb Friction Coefficient: µ = 0.5 (Quartz on Quartz) Void Ratio (dense packing): e = 0.4 [J. Fleischmann] 12
13 Direct Shear Analysis via Granular Dynamics [using LAMMPS/LIGGGHTS and Chrono] DEM contact model in Chrono Parallel 1800 uniform spheres randomly packed Particle Diameter: D = 5 mm Shear Speed: 1 mm/s Inter Particle Coulomb Friction Coefficient: µ = 0.5 (Quartz on Quartz) Void Ratio (dense packing): e = 0.4 Chrono Serial, no history Chrono Parallel, no history [J. Fleischmann] 13


14 Wave propagation in ordered granular material [Arman] 14

15 [Antonio Recuero] 15
16 Penalty Method the Pros Backed by large body of literature and numerous validation studies No increase in the size of the problem This is unlike the complementarity approach, discussed next Can accommodate shock wave propagation Can t do w/ complementarity approach since it s a pure rigid body solution Easy to implement Entire numerical solution decoupled Easy to scale up to large problems Parallel computing friendly run in parallel on per contact basis Memory communication intensive 16
17 Penalty Method Cons 1. Numerical stability requires small integration time steps Long simulation times 2. Choice of integration time step strongly influences results 3. Sensitive wrt information provided by the collision detection engine 4. There is some hand waving when it comes to arbitrary shapes and the fact that the friction force is a multi valued function 17
18 DEM, Further Reading [1] D. Ertas, G. Grest, T. Halsey, D. Levine and L. Silbert, Gravity driven dense granular flows, EPL (Europhysics Letters), 56 (2001), pp [2] H. Kruggel Emden, E. Simsek, S. Rickelt, S. Wirtz and V. Scherer, Review and extension of normal force models for the Discrete Element Method, Powder Technology, 171 (2007), pp [3] H. Kruggel Emden, S. Wirtz and V. Scherer, A study on tangential force laws applicable to the discrete element method (DEM) for materials with viscoelastic or plastic behavior, Chemical Engineering Science (2007). [4] D. C. Rapaport, Radial and axial segregation of granular matter in a rotating cylinder: A simulation study, Physical Review E, 75 (2007), pp [5] L. Silbert, D. Ertas, G. Grest, T. Halsey, D. Levine and S. Plimpton, Granular flow down an inclined plane: Bagnold scaling and rheology, Physical Review E, 64 (2001), pp [6] L. Vu Quoc, L. Lesburg and X. Zhang, An accurate tangential force displacement model for granular flow simulations: Contacting spheres with plastic deformation, force driven formulation, Journal of Computational Physics, 196 (2004), pp [7] L. Vu Quoc, X. Zhang and L. Lesburg, A normal force displacement model for contacting spheres accounting for plastic deformation: force driven formulation, Journal of Applied Mechanics, 67 (2000), pp
19 The Complementarity Approach aka Differential Variational Inequality (DVI) Method 19


20 Two Shapes, and the Distance [Gap Function] Signed distance function in a given configuration and Contact when distance function is zero 20


21 Body A Body B Contact Scenario 21


22 Defining the Normal and Tangential Forces 22





23 DVI Based Methods: The Contact Model 23


24 DVI Based Methods: The Friction Model 24


25 Coulomb s Model Posed as the Solution of an Optimization Problem 25


26 The DVI Problem: The EOM, in Fine Granularity Form 26


27 Frictional Contact: The Matrix Vector Form 27




28 The Discretization Process 28



29 The Discretization Process 29




30 The NCP CCP Metamorphosis 30

31 The Cone Complementarity Problem 31




32 Cone Complementarity Problem (CCP) 32

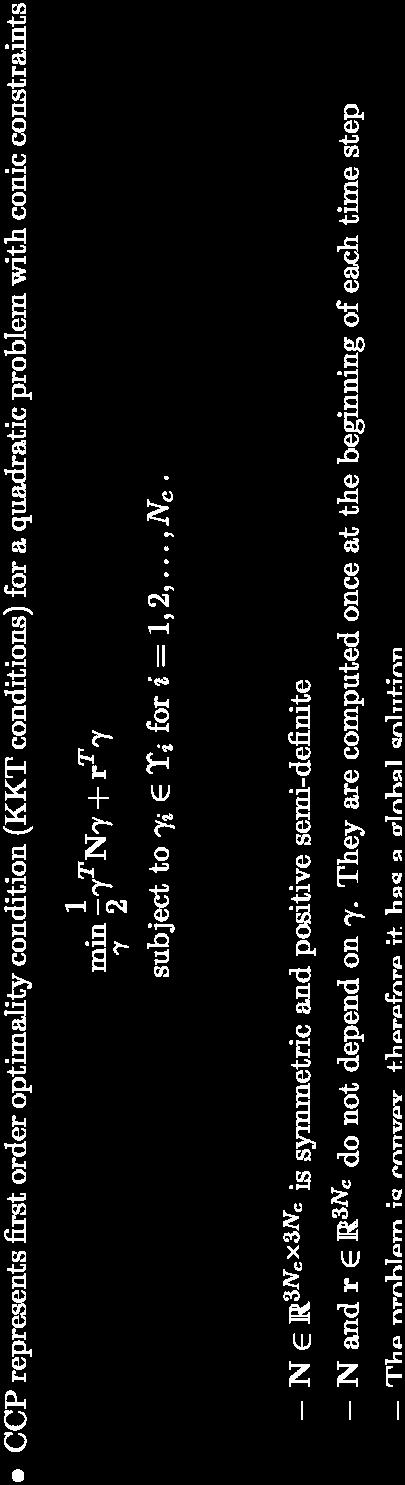
33 The Optimization Angle 33

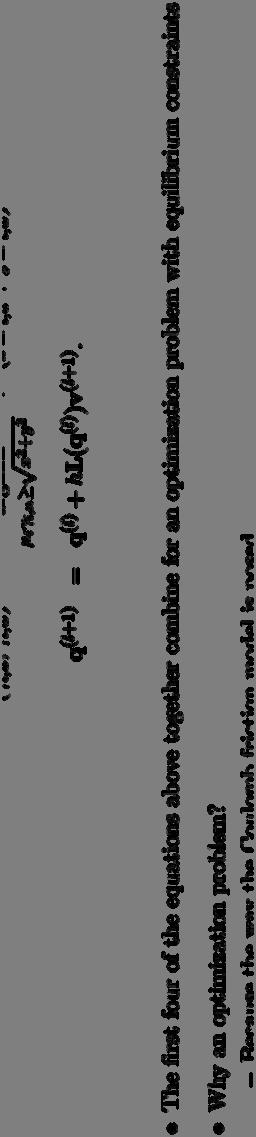
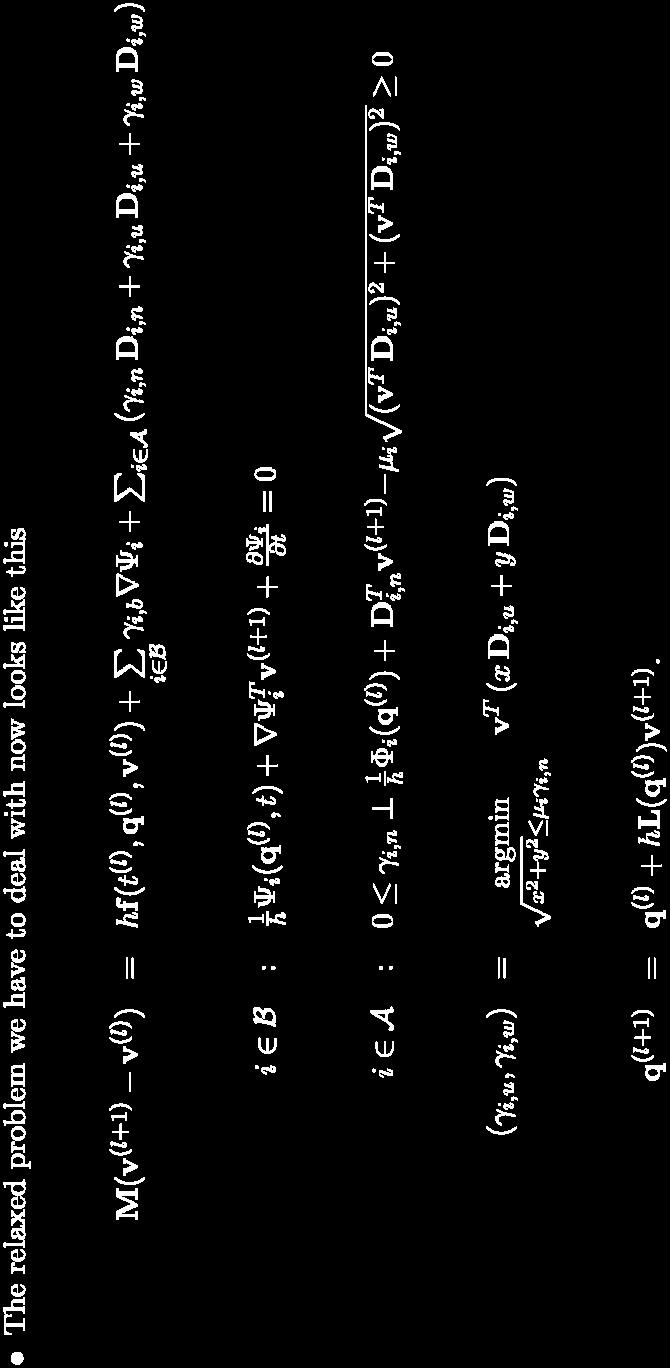
34 Wrapping it Up, Complementarity Approach 34
35 Complementarity Approach: Putting Things in Perspective Perform collision detection Formulate equations of motion; i.e., pose DVI problem DVI discretized to lead to nonlinear complementarity problem (NCP) Relax NCP to get CCP Equivalently, solve QP with conic constraints to compute Once friction and contact forces available, velocity available Once velocity available, positions are available (numerical integration) 35
36 Additive Manufacturing (3D SLS Printing) Courtesy of Professor Tim Osswald, Polymer Engineering Center, UW Madison 36
![[Hammad]](/docs-images/77/75195297/images/37-0.jpg "37")
37 [Hammad] 37
")

38 Selective Laser Sintering (SLS) Layering 7,800,000 contacts 46,800,000 unknowns [Hammad] 38

39 39


40 Dress 3D Printing Problem 40


41 Using Simulation in 3D Printing of Clothes 41
42 42
43 43


44 44


45 45
46 Pros and Cons, Complementarity Approach Pros Allows for large integration step sizes since it doesn t have to deal with contact stiffness Reduced number of model parameters one can fiddle with It looks at the entire problem, it doesn t artificially decouples the problem Cons Requires a global solution, which means that large systems lead to large coupled problems Our implementation has numerical artifacts owing to the relaxation of the non penetration condition Challenging to model coefficient of restitution (currently uses an inelastic model) Stuck w/ a rigid body dynamics take on the problem (can t propagate shock waves) 46
47 Reference, DVI Literature Lab technical report: TR : Posing Multibody Dynamics with Friction and Contact as a Differential Algebraic Inclusion Problem D. Negrut, R. Serban: pdf D. E. Stewart and J. C. Trinkle, An implicit time stepping scheme for rigid body dynamics with inelastic collisions and Coulomb friction, International Journal for Numerical Methods in Engineering, 39 (1996), pp D. E. Stewart, Rigid body dynamics with friction and impact, SIAM Review, 42 (2000), pp M. Anitescu and G. D. Hart, A constraint stabilized time stepping approach for rigid multibody dynamics with joints, contact and friction, International Journal for Numerical Methods in Engineering, 60 (2004), pp M. Anitescu and A. Tasora, A matrix free cone complementarity approach for solving large scale, nonsmooth, rigid body dynamics, Comput. Methods Appl. Mech. Engrg. 200 (2011)
48 Closing Remarks [Applies both for Penalty and DVI approaches] There is some hand waving when it comes to handling friction and contact Both in Penalty and DVI Handling frictional contact is equally art and science To get something to run robustly requires tweaking Takes some time to understand strong/weak points of each approach Continues to be area of active research 48
49 Supplemental Slides 49
50 Notation Conventions [1/2] 50
51 51
52 General Comments, DVI Differential Variational Inequality (DVI): a set of differential equations that hold in conjunction with a collection of constraints Classical equations of motion: Newton Euler EOMs, govern time evolutions of constrained MBS Kinematic constraints coming from joints These constraints are called bilateral constraints When dealing with contacts, the non penetration condition captured as a unilateral constraint At point of contact, relative to body 1, body 2 can move outwards, but not inwards The variational attribute stems from the optimization problem posing the Coulomb friction model 52


53 [Nomenclature] Bilateral vs. Unilateral Constraints 53
TR DEM-PM Contact Model with Multi-Step Tangential Contact Displacement History. Jonathan Fleischmann
 TR-2015-06 DEM-PM Contact Model with Multi-Step Tangential Contact Displacement History Jonathan Fleischmann April 24, 2015 Abstract We provide a brief overview of the Discrete Element Method (DEM) for
TR-2015-06 DEM-PM Contact Model with Multi-Step Tangential Contact Displacement History Jonathan Fleischmann April 24, 2015 Abstract We provide a brief overview of the Discrete Element Method (DEM) for
Technical Report TR
 Simulation-Based Engineering Lab University of Wisconsin-Madison Technical Report TR-2016-16 Using the Complementarity and Penalty Methods for Solving Frictional Contact Problems in Chrono: Validation
Simulation-Based Engineering Lab University of Wisconsin-Madison Technical Report TR-2016-16 Using the Complementarity and Penalty Methods for Solving Frictional Contact Problems in Chrono: Validation
Time integration. DVI and HHT time stepping methods in Chrono
 Time integration DVI and HHT time stepping methods in Chrono Time Integration in Chrono Two classes of time stepping methods in Chrono Time steppers for smooth dynamics Classical multibody dynamics rigid
Time integration DVI and HHT time stepping methods in Chrono Time Integration in Chrono Two classes of time stepping methods in Chrono Time steppers for smooth dynamics Classical multibody dynamics rigid
Technical Report TR
 Simulation-Based Engineering Lab University of Wisconsin-Madison Technical Report TR-2016-17 Using the Complementarity and Penalty Methods for Solving Frictional Contact Problems in Chrono: Validation
Simulation-Based Engineering Lab University of Wisconsin-Madison Technical Report TR-2016-17 Using the Complementarity and Penalty Methods for Solving Frictional Contact Problems in Chrono: Validation
Identification of Compliant Contact Force Parameters in Multibody Systems Based on the Neural Network Approach Related to Municipal Property Damages
 American Journal of Neural Networks and Applications 2017; 3(5): 49-55 http://www.sciencepublishinggroup.com/j/ajnna doi: 10.11648/j.ajnna.20170305.11 ISSN: 2469-7400 (Print); ISSN: 2469-7419 (Online)
American Journal of Neural Networks and Applications 2017; 3(5): 49-55 http://www.sciencepublishinggroup.com/j/ajnna doi: 10.11648/j.ajnna.20170305.11 ISSN: 2469-7400 (Print); ISSN: 2469-7419 (Online)
A Hard Constraint Time-Stepping Approach for Rigid Multibody Dynamics with Joints, Contact and Friction. Gary D. Hart University of Pittsburgh
 A Hard Constraint Time-Stepping Approach for Rigid Multibody Dynamics with Joints, Contact and Friction Gary D. Hart University of Pittsburgh 1 Goal Develop method for simulating rigid multibody dynamics
A Hard Constraint Time-Stepping Approach for Rigid Multibody Dynamics with Joints, Contact and Friction Gary D. Hart University of Pittsburgh 1 Goal Develop method for simulating rigid multibody dynamics
Advanced fluid-mechanism interaction in DualSPHysics
 Advanced fluid-mechanism interaction in DualSPHysics RICARDO B. CANELAS 1, MOISÉS BRITO 1, ORLANDO G. FEAL 2, JOSE M. DOMÍNGUEZ 2, ALEJANDRO J.C. CRESPO 2 1 C E R I S, I N S T I T U T O S U P E R I O R
Advanced fluid-mechanism interaction in DualSPHysics RICARDO B. CANELAS 1, MOISÉS BRITO 1, ORLANDO G. FEAL 2, JOSE M. DOMÍNGUEZ 2, ALEJANDRO J.C. CRESPO 2 1 C E R I S, I N S T I T U T O S U P E R I O R
Using a Granular Dynamics Code to Investigate the Performance of a Helical Anchoring System Design
 Using a Granular Dynamics Code to Investigate the Performance of a Helical Anchoring System Design Introduction NASA is interested in designing a spacecraft capable of visiting a Near Earth Object (NEO),
Using a Granular Dynamics Code to Investigate the Performance of a Helical Anchoring System Design Introduction NASA is interested in designing a spacecraft capable of visiting a Near Earth Object (NEO),
A Linear Complementarity Time-Stepping Scheme for Rigid Multibody Dynamics with Nonsmooth Shapes. Gary D. Hart University of Pittsburgh
 A Linear Complementarity Time-Stepping Scheme for Rigid Multibody Dynamics with Nonsmooth Shapes. Gary D. Hart University of Pittsburgh 1 Introduction Nonsmooth rigid multibody dynamics (NRMD) methods
A Linear Complementarity Time-Stepping Scheme for Rigid Multibody Dynamics with Nonsmooth Shapes. Gary D. Hart University of Pittsburgh 1 Introduction Nonsmooth rigid multibody dynamics (NRMD) methods
C. Wassgren, Purdue University 1. DEM Modeling: Lecture 07 Normal Contact Force Models. Part II
 C. Wassgren, Purdue University 1 DEM Modeling: Lecture 07 s. Part II C. Wassgren, Purdue University 2 Excluded volume error Effects of Soft Springs consider the solid fraction in a compressed system containing
C. Wassgren, Purdue University 1 DEM Modeling: Lecture 07 s. Part II C. Wassgren, Purdue University 2 Excluded volume error Effects of Soft Springs consider the solid fraction in a compressed system containing
A FRICTION MODEL FOR NON-SINGULAR COMPLEMENTARITY FORMULATIONS FOR MULTIBODY SYSTEMS WITH CONTACTS
 Proceedings of the ASME 217 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC217 August 6-9, 217, Cleveland, Ohio, USA DETC217-67988 A FRICTION
Proceedings of the ASME 217 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC217 August 6-9, 217, Cleveland, Ohio, USA DETC217-67988 A FRICTION
ROCKING RESPONSE OF MASONRY BLOCK STRUCTURES USING MATHEMATICAL PROGRAMMING
 ECCOMAS Congress 2016 VII European Congress on Computational Methods in Applied Sciences and Engineering M. Papadrakakis, V. Papadopoulos, G. Stefanou, V. Plevris (eds.) Crete Island, Greece, 5 10 June
ECCOMAS Congress 2016 VII European Congress on Computational Methods in Applied Sciences and Engineering M. Papadrakakis, V. Papadopoulos, G. Stefanou, V. Plevris (eds.) Crete Island, Greece, 5 10 June
Characterization of Thermo-mechanical Performances related to Breeder Pebble Beds by Discrete Element Method
 Characterization of Thermo-mechanical Performances related to Breeder Pebble Beds by Discrete Element Method Presented by Zhiyong (John) An With contributions from: A. Ying and M. Abdou Mechanical & Aerospace
Characterization of Thermo-mechanical Performances related to Breeder Pebble Beds by Discrete Element Method Presented by Zhiyong (John) An With contributions from: A. Ying and M. Abdou Mechanical & Aerospace
2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity
 2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity Energy 7 4 Kinematics Free fall Collisions 3 5 Dynamics
2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity Energy 7 4 Kinematics Free fall Collisions 3 5 Dynamics
General Theoretical Concepts Related to Multibody Dynamics
 General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
Powder Technology 218 (2012) Contents lists available at SciVerse ScienceDirect. Powder Technology
 Contents lists available at SciVerse ScienceDirect. Powder Technology") Powder Technology 218 (2012) 76 85 Contents lists available at SciVerse ScienceDirect Powder Technology journal homepage: www.elsevier.com/locate/powtec Dynamic simulation of granular packing of fine cohesive
Powder Technology 218 (2012) 76 85 Contents lists available at SciVerse ScienceDirect Powder Technology journal homepage: www.elsevier.com/locate/powtec Dynamic simulation of granular packing of fine cohesive
Explore Kapitza s Pendulum Behavior via Trajectory Optimization. Yifan Hou
 1 Introduction 12 course Explore Kapitza s Pendulum Behavior via Trajectory Optimization Project for: Mechanics of Manipulation, 16 741 Yifan Hou Andrew id: yifanh houyf11@gmail.com or yifanh@andrew.cmu.edu
1 Introduction 12 course Explore Kapitza s Pendulum Behavior via Trajectory Optimization Project for: Mechanics of Manipulation, 16 741 Yifan Hou Andrew id: yifanh houyf11@gmail.com or yifanh@andrew.cmu.edu
What make cloth hard to simulate?
 Cloth Simulation What make cloth hard to simulate? Due to the thin and flexible nature of cloth, it produces detailed folds and wrinkles, which in turn can lead to complicated selfcollisions. Cloth is
Cloth Simulation What make cloth hard to simulate? Due to the thin and flexible nature of cloth, it produces detailed folds and wrinkles, which in turn can lead to complicated selfcollisions. Cloth is
Non-Linear Finite Element Methods in Solid Mechanics Attilio Frangi, Politecnico di Milano, February 17, 2017, Lesson 5
 Non-Linear Finite Element Methods in Solid Mechanics Attilio Frangi, attilio.frangi@polimi.it Politecnico di Milano, February 17, 2017, Lesson 5 1 Politecnico di Milano, February 17, 2017, Lesson 5 2 Outline
Non-Linear Finite Element Methods in Solid Mechanics Attilio Frangi, attilio.frangi@polimi.it Politecnico di Milano, February 17, 2017, Lesson 5 1 Politecnico di Milano, February 17, 2017, Lesson 5 2 Outline
force model, based on the elastic Hertz theory, together with a dissipative term associated with the internal damping, is utilized to
 FLORES, P., LANKARANI, H.M., DYNAMIC RESPONSE OF MULTIBODY SYSTEMS WITH MULTIPLE CLEARANCE JOINTS. ASME JOURNAL OF COMPUTATIONAL AND NONLINEAR DYNAMICS, VOL. 7(3), 313-13, 1. ABSTRACT A general methodology
FLORES, P., LANKARANI, H.M., DYNAMIC RESPONSE OF MULTIBODY SYSTEMS WITH MULTIPLE CLEARANCE JOINTS. ASME JOURNAL OF COMPUTATIONAL AND NONLINEAR DYNAMICS, VOL. 7(3), 313-13, 1. ABSTRACT A general methodology
Boundary Nonlinear Dynamic Analysis
 Boundary Nonlinear Dynamic Analysis Damper type Nonlinear Link Base Isolator type Nonlinear Link Modal Nonlinear Analysis : Equivalent Dynamic Load Damper type Nonlinear Link Visco-Elastic Damper (VED)
Boundary Nonlinear Dynamic Analysis Damper type Nonlinear Link Base Isolator type Nonlinear Link Modal Nonlinear Analysis : Equivalent Dynamic Load Damper type Nonlinear Link Visco-Elastic Damper (VED)
Steady Flow and its Instability of Gravitational Granular Flow
 Steady Flow and its Instability of Gravitational Granular Flow Namiko Mitarai Department of Chemistry and Physics of Condensed Matter, Graduate School of Science, Kyushu University, Japan. A thesis submitted
Steady Flow and its Instability of Gravitational Granular Flow Namiko Mitarai Department of Chemistry and Physics of Condensed Matter, Graduate School of Science, Kyushu University, Japan. A thesis submitted
27. Impact Mechanics of Manipulation
 27. Impact Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 27. Mechanics of Manipulation p.1 Lecture 27. Impact Chapter 1 Manipulation 1
27. Impact Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 27. Mechanics of Manipulation p.1 Lecture 27. Impact Chapter 1 Manipulation 1
Visual Interactive Simulation, TDBD24, Spring 2006
 Visual Interactive Simulation, TDBD24, Spring 2006 Lecture 6 Outline Cross product as matrix multiplication The collision matrix The Newton Coulomb impulse for rigid bodies N C updates of translational
Visual Interactive Simulation, TDBD24, Spring 2006 Lecture 6 Outline Cross product as matrix multiplication The collision matrix The Newton Coulomb impulse for rigid bodies N C updates of translational
Clusters in granular flows : elements of a non-local rheology
 CEA-Saclay/SPEC; Group Instabilities and Turbulence Clusters in granular flows : elements of a non-local rheology Olivier Dauchot together with many contributors: D. Bonamy, E. Bertin, S. Deboeuf, B. Andreotti,
CEA-Saclay/SPEC; Group Instabilities and Turbulence Clusters in granular flows : elements of a non-local rheology Olivier Dauchot together with many contributors: D. Bonamy, E. Bertin, S. Deboeuf, B. Andreotti,
Fine adhesive particles A contact model including viscous damping
 Fine adhesive particles A contact model including viscous damping CHoPS 2012 - Friedrichshafen 7 th International Conference for Conveying and Handling of Particulate Solids Friedrichshafen, 12 th September
Fine adhesive particles A contact model including viscous damping CHoPS 2012 - Friedrichshafen 7 th International Conference for Conveying and Handling of Particulate Solids Friedrichshafen, 12 th September
Dynamics and control of mechanical systems
 Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Iterative Rigid Multibody Dynamics A Comparison of Computational Methods
 Iterative Rigid Multibody Dynamics A Comparison of Computational Methods Tobias Preclik, Klaus Iglberger, Ulrich Rüde University Erlangen-Nuremberg Chair for System Simulation (LSS) July 1st 2009 T. Preclik
Iterative Rigid Multibody Dynamics A Comparison of Computational Methods Tobias Preclik, Klaus Iglberger, Ulrich Rüde University Erlangen-Nuremberg Chair for System Simulation (LSS) July 1st 2009 T. Preclik
AME COMPUTATIONAL MULTIBODY DYNAMICS. Friction and Contact-Impact
 1 Friction AME553 -- COMPUTATIONAL MULTIBODY DYNAMICS Friction and Contact-Impact Friction force may be imposed between contacting bodies to oppose their relative motion. Friction force can be a function
1 Friction AME553 -- COMPUTATIONAL MULTIBODY DYNAMICS Friction and Contact-Impact Friction force may be imposed between contacting bodies to oppose their relative motion. Friction force can be a function
midas Civil Dynamic Analysis
 Edgar De Los Santos Midas IT August 23 rd 2017 Contents: Introduction Eigen Value Analysis Response Spectrum Analysis Pushover Analysis Time History Analysis Seismic Analysis Seismic Analysis The seismic
Edgar De Los Santos Midas IT August 23 rd 2017 Contents: Introduction Eigen Value Analysis Response Spectrum Analysis Pushover Analysis Time History Analysis Seismic Analysis Seismic Analysis The seismic
Improving Contact-Friction Conditions in Dynamic Simulations: ~pplication to the Taylor Impact Test
 J phys ZV FRANCE 7 (1997) Colloque C3, Supplement au Journal de Physique I11 dyaoqt 1997 Improving Contact-Friction Conditions in Dynamic Simulations: ~pplication to the Taylor Impact Test J. Bonini, F.
J phys ZV FRANCE 7 (1997) Colloque C3, Supplement au Journal de Physique I11 dyaoqt 1997 Improving Contact-Friction Conditions in Dynamic Simulations: ~pplication to the Taylor Impact Test J. Bonini, F.
Prediction of dynamic behavior of workpieces in ultrasonic plastic welding
 Prediction of dynamic behavior of workpieces in ultrasonic plastic welding Takao HIRAI** Fumiyasu KURATANI** Tatsuya YOSHIDA** and Saiji WASHIO*** **Department of Mechanical Engineering, Graduate School
Prediction of dynamic behavior of workpieces in ultrasonic plastic welding Takao HIRAI** Fumiyasu KURATANI** Tatsuya YOSHIDA** and Saiji WASHIO*** **Department of Mechanical Engineering, Graduate School
Towards hydrodynamic simulations of wet particle systems
 The 7th World Congress on Particle Technology (WCPT7) Towards hydrodynamic simulations of wet particle systems Sudeshna Roy a*, Stefan Luding a, Thomas Weinhart a a Faculty of Engineering Technology, MESA+,
The 7th World Congress on Particle Technology (WCPT7) Towards hydrodynamic simulations of wet particle systems Sudeshna Roy a*, Stefan Luding a, Thomas Weinhart a a Faculty of Engineering Technology, MESA+,
STATICS & DYNAMICS. Engineering Mechanics. Gary L. Gray. Francesco Costanzo. Michael E. Plesha. University of Wisconsin-Madison
 Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
Dry and wet granular flows. Diego Berzi
 Dry and wet granular flows Diego Berzi Outline 2 What? Why? How? When? Who? Where? Then? What? Granular flows many solid moving particles 3 particle mass is large (at least 10 20 molecular masses). Hence,
Dry and wet granular flows Diego Berzi Outline 2 What? Why? How? When? Who? Where? Then? What? Granular flows many solid moving particles 3 particle mass is large (at least 10 20 molecular masses). Hence,
CHARACTERISING THE FAILURE AND REPOSE ANGLES OF IRREGULARLY SHAPED THREE-DIMENSIONAL PARTICLES USING DEM
 Ninth International Conference on CFD in the Minerals and Process Industries CSIRO, Melbourne, Australia 10-12 December 2012 CHARACTERISING THE FAILURE AND REPOSE ANGLES OF IRREGULARLY SHAPED THREE-DIMENSIONAL
Ninth International Conference on CFD in the Minerals and Process Industries CSIRO, Melbourne, Australia 10-12 December 2012 CHARACTERISING THE FAILURE AND REPOSE ANGLES OF IRREGULARLY SHAPED THREE-DIMENSIONAL
Simulation of Particulate Solids Processing Using Discrete Element Method Oleh Baran
 Simulation of Particulate Solids Processing Using Discrete Element Method Oleh Baran Outline DEM overview DEM capabilities in STAR-CCM+ Particle types and injectors Contact physics Coupling to fluid flow
Simulation of Particulate Solids Processing Using Discrete Element Method Oleh Baran Outline DEM overview DEM capabilities in STAR-CCM+ Particle types and injectors Contact physics Coupling to fluid flow
Simulation in Computer Graphics Elastic Solids. Matthias Teschner
 Simulation in Computer Graphics Elastic Solids Matthias Teschner Outline Introduction Elastic forces Miscellaneous Collision handling Visualization University of Freiburg Computer Science Department 2
Simulation in Computer Graphics Elastic Solids Matthias Teschner Outline Introduction Elastic forces Miscellaneous Collision handling Visualization University of Freiburg Computer Science Department 2
NUMERICAL SIMULATION OF THE INELASTIC SEISMIC RESPONSE OF RC STRUCTURES WITH ENERGY DISSIPATORS
 NUMERICAL SIMULATION OF THE INELASTIC SEISMIC RESPONSE OF RC STRUCTURES WITH ENERGY DISSIPATORS ABSTRACT : P Mata1, AH Barbat1, S Oller1, R Boroschek2 1 Technical University of Catalonia, Civil Engineering
NUMERICAL SIMULATION OF THE INELASTIC SEISMIC RESPONSE OF RC STRUCTURES WITH ENERGY DISSIPATORS ABSTRACT : P Mata1, AH Barbat1, S Oller1, R Boroschek2 1 Technical University of Catalonia, Civil Engineering
Determination of Mechanical Properties of Elastomers Using Instrumented Indentation
 Determination of Mechanical Properties of Elastomers Using Instrumented Indentation, Antonios E. Giannakopoulos and Dimitrios Bourntenas University of Thessaly, Department of Civil Engineering, Volos 38334,
Determination of Mechanical Properties of Elastomers Using Instrumented Indentation, Antonios E. Giannakopoulos and Dimitrios Bourntenas University of Thessaly, Department of Civil Engineering, Volos 38334,
APPLIED MATHEMATICS AM 02
 AM SYLLABUS (2013) APPLIED MATHEMATICS AM 02 SYLLABUS Applied Mathematics AM 02 Syllabus (Available in September) Paper I (3 hrs)+paper II (3 hrs) Applied Mathematics (Mechanics) Aims A course based on
AM SYLLABUS (2013) APPLIED MATHEMATICS AM 02 SYLLABUS Applied Mathematics AM 02 Syllabus (Available in September) Paper I (3 hrs)+paper II (3 hrs) Applied Mathematics (Mechanics) Aims A course based on
Middle East Technical University Department of Mechanical Engineering ME 305 Fluid Mechanics I Fall 2018 Section 4 (Dr.
 Reading Assignments Middle East Technical University Department of Mechanical Engineering ME 305 Fluid Mechanics I Fall 2018 Section 4 (Dr. Sert) Study Set 1 You can find the answers of some of the following
Reading Assignments Middle East Technical University Department of Mechanical Engineering ME 305 Fluid Mechanics I Fall 2018 Section 4 (Dr. Sert) Study Set 1 You can find the answers of some of the following
Contents. Dynamics and control of mechanical systems. Focus on
 Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Finite Element Analysis Lecture 1. Dr./ Ahmed Nagib
 Finite Element Analysis Lecture 1 Dr./ Ahmed Nagib April 30, 2016 Research and Development Mathematical Model Mathematical Model Mathematical Model Finite Element Analysis The linear equation of motion
Finite Element Analysis Lecture 1 Dr./ Ahmed Nagib April 30, 2016 Research and Development Mathematical Model Mathematical Model Mathematical Model Finite Element Analysis The linear equation of motion
Numerical simulations for isostatic and die compaction of powder by the discrete element method
 Numerical simulations for isostatic and die compaction of powder by the discrete element method J.-F. Jerier 1, B. Harthong 1, V. Richefeu 1, D. Imbault 1, F.-V. Donzé 1,1, P. Dorémus 1 a University of
Numerical simulations for isostatic and die compaction of powder by the discrete element method J.-F. Jerier 1, B. Harthong 1, V. Richefeu 1, D. Imbault 1, F.-V. Donzé 1,1, P. Dorémus 1 a University of
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics November 2, 2016 Antonio Recuero University of Wisconsin-Madison Quotes of the Day The methods which I set forth do not require either constructions or geometrical
ME751 Advanced Computational Multibody Dynamics November 2, 2016 Antonio Recuero University of Wisconsin-Madison Quotes of the Day The methods which I set forth do not require either constructions or geometrical
GAME PHYSICS ENGINE DEVELOPMENT
 GAME PHYSICS ENGINE DEVELOPMENT IAN MILLINGTON i > AMSTERDAM BOSTON HEIDELBERG fpf l LONDON. NEW YORK. OXFORD ^. PARIS SAN DIEGO SAN FRANCISCO втс^н Г^ 4.«Mt-fSSKHbe. SINGAPORE. SYDNEY. TOKYO ELSEVIER
GAME PHYSICS ENGINE DEVELOPMENT IAN MILLINGTON i > AMSTERDAM BOSTON HEIDELBERG fpf l LONDON. NEW YORK. OXFORD ^. PARIS SAN DIEGO SAN FRANCISCO втс^н Г^ 4.«Mt-fSSKHbe. SINGAPORE. SYDNEY. TOKYO ELSEVIER
Size Segregation in the Brazil Nut Effect
 Size Segregation in the Brazil Nut Effect Aline C. Soterroni and Fernando M. Ramos Applied Computing Program, National Institute for Space Research, São José dos Campos, Brazil Laboratory of Computing
Size Segregation in the Brazil Nut Effect Aline C. Soterroni and Fernando M. Ramos Applied Computing Program, National Institute for Space Research, São José dos Campos, Brazil Laboratory of Computing
CS-184: Computer Graphics
 CS-184: Computer Graphics Lecture #25: Rigid Body Simulations Tobias Pfaff 537 Soda (Visual Computing Lab) tpfaff@berkeley.edu Reminder Final project presentations next week! Game Physics Types of Materials
CS-184: Computer Graphics Lecture #25: Rigid Body Simulations Tobias Pfaff 537 Soda (Visual Computing Lab) tpfaff@berkeley.edu Reminder Final project presentations next week! Game Physics Types of Materials
Validation of a Flexible Multibody Belt-Drive Model
 Paper received: 23.12.2010 DOI:10.5545/sv-jme.2010.257 Paper accepted: 12.05.2011 Validation of a Flexible Multibody Belt-Drive Model Čepon, G. Manin, L. Boltežar, M. Gregor Čepon 1 Lionel Manin 2 Miha
Paper received: 23.12.2010 DOI:10.5545/sv-jme.2010.257 Paper accepted: 12.05.2011 Validation of a Flexible Multibody Belt-Drive Model Čepon, G. Manin, L. Boltežar, M. Gregor Čepon 1 Lionel Manin 2 Miha
Turbulentlike Quantitative Analysis on Energy Dissipation in Vibrated Granular Media
 Copyright 011 Tech Science Press CMES, vol.71, no., pp.149-155, 011 Turbulentlike Quantitative Analysis on Energy Dissipation in Vibrated Granular Media Zhi Yuan Cui 1, Jiu Hui Wu 1 and Di Chen Li 1 Abstract:
Copyright 011 Tech Science Press CMES, vol.71, no., pp.149-155, 011 Turbulentlike Quantitative Analysis on Energy Dissipation in Vibrated Granular Media Zhi Yuan Cui 1, Jiu Hui Wu 1 and Di Chen Li 1 Abstract:
Projects. Assignments. Plan. Motivational Films. Motivational Film 1/6/09. Dynamics II. Forces, Collisions and Impulse
 Projects Dynamics II Forces, Collisions and Impulse Presentations: Dates: Week 0: Mon, Feb 6 Week 0: Wed, Feb 8 Finals Week: Tues, Feb 4 (:30 :30) room TBA 5 minutes / presentation Schedule now on Web
Projects Dynamics II Forces, Collisions and Impulse Presentations: Dates: Week 0: Mon, Feb 6 Week 0: Wed, Feb 8 Finals Week: Tues, Feb 4 (:30 :30) room TBA 5 minutes / presentation Schedule now on Web
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction September 4, 2014 Dan Negrut University of Wisconsin-Madison Quote of the day: "History will be kind to me for I intend to write it -Winston
ME451 Kinematics and Dynamics of Machine Systems Introduction September 4, 2014 Dan Negrut University of Wisconsin-Madison Quote of the day: "History will be kind to me for I intend to write it -Winston
Simulation of Micro-sized Granular Particle Packing. using Discrete Element Method
 Simulation of Micro-sized Granular Particle Packing using Discrete Element Method A Thesis Presented to The Graduate Faculty University of Missouri - Columbia In Partial Fulfillment of the Requirements
Simulation of Micro-sized Granular Particle Packing using Discrete Element Method A Thesis Presented to The Graduate Faculty University of Missouri - Columbia In Partial Fulfillment of the Requirements
Dynamic Modelling of Mechanical Systems
 Dynamic Modelling of Mechanical Systems Dr. Bishakh Bhattacharya Professor, Department of Mechanical Engineering g IIT Kanpur Joint Initiative of IITs and IISc - Funded by MHRD Hints of the Last Assignment
Dynamic Modelling of Mechanical Systems Dr. Bishakh Bhattacharya Professor, Department of Mechanical Engineering g IIT Kanpur Joint Initiative of IITs and IISc - Funded by MHRD Hints of the Last Assignment
Micromechanics of granular materials: slow flows
 Micromechanics of granular materials: slow flows Niels P. Kruyt Department of Mechanical Engineering, University of Twente, n.p.kruyt@utwente.nl www.ts.ctw.utwente.nl/kruyt/ 1 Applications of granular
Micromechanics of granular materials: slow flows Niels P. Kruyt Department of Mechanical Engineering, University of Twente, n.p.kruyt@utwente.nl www.ts.ctw.utwente.nl/kruyt/ 1 Applications of granular
3D revolute joint with clearance in multibody systems
 3D revolute joint with clearance in multibody systems Narendra Akhadkar 1, Vincent Acary 2, and Bernard Brogliato 2 1 Schneider Electric, 37 Quai Paul-Louis Merlin, 38000 Grenoble, France, e-mail: narendra.akhadkar@schneider-electric.com
3D revolute joint with clearance in multibody systems Narendra Akhadkar 1, Vincent Acary 2, and Bernard Brogliato 2 1 Schneider Electric, 37 Quai Paul-Louis Merlin, 38000 Grenoble, France, e-mail: narendra.akhadkar@schneider-electric.com
Dry granular flows: gas, liquid or solid?
 Dry granular flows: gas, liquid or solid? Figure 1: Forterre & Pouliquen, Annu. Rev. Fluid Mechanics, 2008 1 Characterizing size and size distribution Grains are not uniform (size, shape, ) Statistical
Dry granular flows: gas, liquid or solid? Figure 1: Forterre & Pouliquen, Annu. Rev. Fluid Mechanics, 2008 1 Characterizing size and size distribution Grains are not uniform (size, shape, ) Statistical
Problem 1: Find the Equation of Motion from the static equilibrium position for the following systems: 1) Assumptions
 Assumptions") Problem 1: Find the Equation of Motion from the static equilibrium position for the following systems: 1) Assumptions k 2 Wheels roll without friction k 1 Motion will not cause block to hit the supports
Problem 1: Find the Equation of Motion from the static equilibrium position for the following systems: 1) Assumptions k 2 Wheels roll without friction k 1 Motion will not cause block to hit the supports
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
Lecture 6: Flow regimes fluid-like
 Granular Flows 1 Lecture 6: Flow regimes fluid-like Quasi-static granular flows have plasticity laws, gaseous granular flows have kinetic theory -- how to model fluid-like flows? Intermediate, dense regime:
Granular Flows 1 Lecture 6: Flow regimes fluid-like Quasi-static granular flows have plasticity laws, gaseous granular flows have kinetic theory -- how to model fluid-like flows? Intermediate, dense regime:
AP PHYSICS 1 Learning Objectives Arranged Topically
 AP PHYSICS 1 Learning Objectives Arranged Topically with o Big Ideas o Enduring Understandings o Essential Knowledges o Learning Objectives o Science Practices o Correlation to Knight Textbook Chapters
AP PHYSICS 1 Learning Objectives Arranged Topically with o Big Ideas o Enduring Understandings o Essential Knowledges o Learning Objectives o Science Practices o Correlation to Knight Textbook Chapters
APPLIED MATHEMATICS IM 02
 IM SYLLABUS (2013) APPLIED MATHEMATICS IM 02 SYLLABUS Applied Mathematics IM 02 Syllabus (Available in September) 1 Paper (3 hours) Applied Mathematics (Mechanics) Aims A course based on this syllabus
IM SYLLABUS (2013) APPLIED MATHEMATICS IM 02 SYLLABUS Applied Mathematics IM 02 Syllabus (Available in September) 1 Paper (3 hours) Applied Mathematics (Mechanics) Aims A course based on this syllabus
Granular flow down an inclined plane: Bagnold scaling and rheology
 PHYSICAL REVIEW E, VOLUME 64, 051302 Granular flow down an inclined plane: Bagnold scaling and rheology Leonardo E. Silbert, 1 Deniz Ertaş, 2 Gary S. Grest, 1 Thomas C. Halsey, 2 Dov Levine, 3 and Steven
PHYSICAL REVIEW E, VOLUME 64, 051302 Granular flow down an inclined plane: Bagnold scaling and rheology Leonardo E. Silbert, 1 Deniz Ertaş, 2 Gary S. Grest, 1 Thomas C. Halsey, 2 Dov Levine, 3 and Steven
CAEFEM v9.5 Information
 CAEFEM v9.5 Information Concurrent Analysis Corporation, 50 Via Ricardo, Thousand Oaks, CA 91320 USA Tel. (805) 375 1060, Fax (805) 375 1061 email: info@caefem.com or support@caefem.com Web: http://www.caefem.com
CAEFEM v9.5 Information Concurrent Analysis Corporation, 50 Via Ricardo, Thousand Oaks, CA 91320 USA Tel. (805) 375 1060, Fax (805) 375 1061 email: info@caefem.com or support@caefem.com Web: http://www.caefem.com
The Influence of Contact Friction on the Breakage Behavior of Brittle Granular Materials using DEM
 The Influence of Contact Friction on the Breakage Behavior of Brittle Granular Materials using DEM *Yi-Ming Liu 1) and Hua-Bei Liu 2) 1), 2) School of Civil Engineering and Mechanics, Huazhong University
The Influence of Contact Friction on the Breakage Behavior of Brittle Granular Materials using DEM *Yi-Ming Liu 1) and Hua-Bei Liu 2) 1), 2) School of Civil Engineering and Mechanics, Huazhong University
Modified Kinetic Theory Applied to the Shear Flows of Granular Materials
 Modified Kinetic Theory Applied to the Shear Flows of Granular Materials Yifei Duan, 1) Zhi-Gang Feng, 1,a) Efstathios E. Michaelides, 2) Shaolin Mao 3) 1 Department of Mechanical Engineering, UTSA, San
Modified Kinetic Theory Applied to the Shear Flows of Granular Materials Yifei Duan, 1) Zhi-Gang Feng, 1,a) Efstathios E. Michaelides, 2) Shaolin Mao 3) 1 Department of Mechanical Engineering, UTSA, San
A Generalized Maximum Dissipation Principle in an Impulse-velocity Time-stepping Scheme
 A Generalized Maximum Dissipation Principle in an Impulse-velocity Time-stepping Scheme T. Preclik, U. Rüde September 2, 213 Chair of Computer Science 1 (System Simulation) University of Erlangen-Nürnberg,
A Generalized Maximum Dissipation Principle in an Impulse-velocity Time-stepping Scheme T. Preclik, U. Rüde September 2, 213 Chair of Computer Science 1 (System Simulation) University of Erlangen-Nürnberg,
Course Name: AP Physics. Team Names: Jon Collins. Velocity Acceleration Displacement
 Course Name: AP Physics Team Names: Jon Collins 1 st 9 weeks Objectives Vocabulary 1. NEWTONIAN MECHANICS and lab skills: Kinematics (including vectors, vector algebra, components of vectors, coordinate
Course Name: AP Physics Team Names: Jon Collins 1 st 9 weeks Objectives Vocabulary 1. NEWTONIAN MECHANICS and lab skills: Kinematics (including vectors, vector algebra, components of vectors, coordinate
where G is called the universal gravitational constant.
 UNIT-I BASICS & STATICS OF PARTICLES 1. What are the different laws of mechanics? First law: A body does not change its state of motion unless acted upon by a force or Every object in a state of uniform
UNIT-I BASICS & STATICS OF PARTICLES 1. What are the different laws of mechanics? First law: A body does not change its state of motion unless acted upon by a force or Every object in a state of uniform
Compact energy absorbing cellular structure
 Structures Under Shock and Impact IX 413 Compact energy absorbing cellular structure M. Ali 1, A. Qamhiyah 2, D. Flugrad 1 & M. Shakoor 1 1 Department of Mechanical Engineering, Iowa State University,
Structures Under Shock and Impact IX 413 Compact energy absorbing cellular structure M. Ali 1, A. Qamhiyah 2, D. Flugrad 1 & M. Shakoor 1 1 Department of Mechanical Engineering, Iowa State University,
Physics Fall Mechanics, Thermodynamics, Waves, Fluids. Lecture 20: Rotational Motion. Slide 20-1
 Physics 1501 Fall 2008 Mechanics, Thermodynamics, Waves, Fluids Lecture 20: Rotational Motion Slide 20-1 Recap: center of mass, linear momentum A composite system behaves as though its mass is concentrated
Physics 1501 Fall 2008 Mechanics, Thermodynamics, Waves, Fluids Lecture 20: Rotational Motion Slide 20-1 Recap: center of mass, linear momentum A composite system behaves as though its mass is concentrated
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics October 24, 2016 Antonio Recuero University of Wisconsin-Madison Quote of the Day If a cluttered desk is a sign of a cluttered mind, of what, then, is an
ME751 Advanced Computational Multibody Dynamics October 24, 2016 Antonio Recuero University of Wisconsin-Madison Quote of the Day If a cluttered desk is a sign of a cluttered mind, of what, then, is an
An Energy Dissipative Constitutive Model for Multi-Surface Interfaces at Weld Defect Sites in Ultrasonic Consolidation
 An Energy Dissipative Constitutive Model for Multi-Surface Interfaces at Weld Defect Sites in Ultrasonic Consolidation Nachiket Patil, Deepankar Pal and Brent E. Stucker Industrial Engineering, University
An Energy Dissipative Constitutive Model for Multi-Surface Interfaces at Weld Defect Sites in Ultrasonic Consolidation Nachiket Patil, Deepankar Pal and Brent E. Stucker Industrial Engineering, University
Lehrstuhl B für Mechanik Technische Universität München D Garching Germany
 DISPLACEMENT POTENTIALS IN NON-SMOOTH DYNAMICS CH. GLOCKER Lehrstuhl B für Mechanik Technische Universität München D-85747 Garching Germany Abstract. The paper treats the evaluation of the accelerations
DISPLACEMENT POTENTIALS IN NON-SMOOTH DYNAMICS CH. GLOCKER Lehrstuhl B für Mechanik Technische Universität München D-85747 Garching Germany Abstract. The paper treats the evaluation of the accelerations
Numerical modeling of sliding contact
 Numerical modeling of sliding contact J.F. Molinari 1) Atomistic modeling of sliding contact; P. Spijker, G. Anciaux 2) Continuum modeling; D. Kammer, V. Yastrebov, P. Spijker pj ICTP/FANAS Conference
Numerical modeling of sliding contact J.F. Molinari 1) Atomistic modeling of sliding contact; P. Spijker, G. Anciaux 2) Continuum modeling; D. Kammer, V. Yastrebov, P. Spijker pj ICTP/FANAS Conference
Discrete Element Modeling of Soils as Granular Materials
 Discrete Element Modeling of Soils as Granular Materials Matthew R. Kuhn Donald P. Shiley School of Engineering University of Portland National Science Foundation Grant No. NEESR-936408 Outline Discrete
Discrete Element Modeling of Soils as Granular Materials Matthew R. Kuhn Donald P. Shiley School of Engineering University of Portland National Science Foundation Grant No. NEESR-936408 Outline Discrete
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
AP Physics 1 Syllabus
 AP Physics 1 Syllabus Course Overview AP Physics 1 will meet for 90 minutes on A-B scheduling and for 45 minutes on regular scheduling. Class activities will include lecture, demonstration, problem solving
AP Physics 1 Syllabus Course Overview AP Physics 1 will meet for 90 minutes on A-B scheduling and for 45 minutes on regular scheduling. Class activities will include lecture, demonstration, problem solving
Modeling and Solving Constraints. Erin Catto Blizzard Entertainment
 Modeling and Solving Constraints Erin Catto Blizzard Entertainment Basic Idea Constraints are used to simulate joints, contact, and collision. We need to solve the constraints to stack boxes and to keep
Modeling and Solving Constraints Erin Catto Blizzard Entertainment Basic Idea Constraints are used to simulate joints, contact, and collision. We need to solve the constraints to stack boxes and to keep
Chapter 2 Finite Element Formulations
 Chapter 2 Finite Element Formulations The governing equations for problems solved by the finite element method are typically formulated by partial differential equations in their original form. These are
Chapter 2 Finite Element Formulations The governing equations for problems solved by the finite element method are typically formulated by partial differential equations in their original form. These are
HADDONFIELD PUBLIC SCHOOLS Curriculum Map for AP Physics, Mechanics C
 Curriculum Map for AP Physics, Mechanics C September Enduring Understandings (The big ideas): Chapter 2 -- Motion Along a Straight Line Essential Questions: How do objects move? 1. Displacement, time,
Curriculum Map for AP Physics, Mechanics C September Enduring Understandings (The big ideas): Chapter 2 -- Motion Along a Straight Line Essential Questions: How do objects move? 1. Displacement, time,
COMPARISON AND COUPLING OF ALGORITHMS FOR COLLISIONS, CONTACT AND FRICTION IN RIGID MULTI-BODY SIMULATIONS
 III European Conference on Computational Mechanics Solids, Structures and Coupled Problems in Engineering C.A. Mota Soares et.al. (eds.) Lisbon, Portugal, 5 8 June 2006 COMPARISON AND COUPLING OF ALGORITHMS
III European Conference on Computational Mechanics Solids, Structures and Coupled Problems in Engineering C.A. Mota Soares et.al. (eds.) Lisbon, Portugal, 5 8 June 2006 COMPARISON AND COUPLING OF ALGORITHMS
PSE Game Physics. Session (6) Angular momentum, microcollisions, damping. Oliver Meister, Roland Wittmann
 Angular momentum, microcollisions, damping. Oliver Meister, Roland Wittmann") PSE Game Physics Session (6) Angular momentum, microcollisions, damping Oliver Meister, Roland Wittmann 23.05.2014 Session (6)Angular momentum, microcollisions, damping, 23.05.2014 1 Outline Angular momentum
PSE Game Physics Session (6) Angular momentum, microcollisions, damping Oliver Meister, Roland Wittmann 23.05.2014 Session (6)Angular momentum, microcollisions, damping, 23.05.2014 1 Outline Angular momentum
ENG1001 Engineering Design 1
 ENG1001 Engineering Design 1 Structure & Loads Determine forces that act on structures causing it to deform, bend, and stretch Forces push/pull on objects Structures are loaded by: > Dead loads permanent
ENG1001 Engineering Design 1 Structure & Loads Determine forces that act on structures causing it to deform, bend, and stretch Forces push/pull on objects Structures are loaded by: > Dead loads permanent
Kinematics vs. Dynamics
 NEWTON'S LAWS Kinematics vs. Dynamics Kinematics describe motion paths mathematically No description of the matter that may travel along motion path Dynamics prediction of motion path(s) of matter Requires
NEWTON'S LAWS Kinematics vs. Dynamics Kinematics describe motion paths mathematically No description of the matter that may travel along motion path Dynamics prediction of motion path(s) of matter Requires
Notes. Multi-Dimensional Plasticity. Yielding. Multi-Dimensional Yield criteria. (so rest state includes plastic strain): #=#(!
: #=#(!") Notes Multi-Dimensional Plasticity! I am back, but still catching up! Assignment is due today (or next time I!m in the dept following today)! Final project proposals: I haven!t sorted through my email,
Notes Multi-Dimensional Plasticity! I am back, but still catching up! Assignment is due today (or next time I!m in the dept following today)! Final project proposals: I haven!t sorted through my email,
The... of a particle is defined as its change in position in some time interval.
 Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
RHEOLOGY Principles, Measurements, and Applications. Christopher W. Macosko
 RHEOLOGY Principles, Measurements, and Applications I -56081-5'79~5 1994 VCH Publishers. Inc. New York Part I. CONSTITUTIVE RELATIONS 1 1 l Elastic Solid 5 1.1 Introduction 5 1.2 The Stress Tensor 8 1.2.1
RHEOLOGY Principles, Measurements, and Applications I -56081-5'79~5 1994 VCH Publishers. Inc. New York Part I. CONSTITUTIVE RELATIONS 1 1 l Elastic Solid 5 1.1 Introduction 5 1.2 The Stress Tensor 8 1.2.1
Physics 141 Rotational Motion 2 Page 1. Rotational Motion 2
 Physics 141 Rotational Motion 2 Page 1 Rotational Motion 2 Right handers, go over there, left handers over here. The rest of you, come with me.! Yogi Berra Torque Motion of a rigid body, like motion of
Physics 141 Rotational Motion 2 Page 1 Rotational Motion 2 Right handers, go over there, left handers over here. The rest of you, come with me.! Yogi Berra Torque Motion of a rigid body, like motion of
41514 Dynamics of Machinery
 41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
IDENTIFICATION OF FRICTION ENERGY DISSIPATION USING FREE VIBRATION VELOCITY: MEASUREMENT AND MODELING
 IDENTIFICATION OF FRICTION ENERGY DISSIPATION USING FREE VIBRATION VELOCITY: MEASUREMENT AND MODELING Christoph A. Kossack, Tony L. Schmitz, and John C. Ziegert Department of Mechanical Engineering and
IDENTIFICATION OF FRICTION ENERGY DISSIPATION USING FREE VIBRATION VELOCITY: MEASUREMENT AND MODELING Christoph A. Kossack, Tony L. Schmitz, and John C. Ziegert Department of Mechanical Engineering and
A penalty-based approach for contact forces computation in bipedal robots
 A penalty-based approach for contact forces computation in bipedal robots Carlos Rengifo, Yannick Aoustin, Christine Chevallereau, Franck Plestan To cite this version: Carlos Rengifo, Yannick Aoustin,
A penalty-based approach for contact forces computation in bipedal robots Carlos Rengifo, Yannick Aoustin, Christine Chevallereau, Franck Plestan To cite this version: Carlos Rengifo, Yannick Aoustin,
arxiv:physics/ v1 [physics.comp-ph] 9 Nov 2005
![arxiv:physics/ v1 [physics.comp-ph] 9 Nov 2005](/thumbs/92/110900553.jpg "arxiv:physics/ v1 [physics.comp-ph] 9 Nov 2005") GRANMA manuscript No. (will be inserted by the editor) Influence of particle elasticity in shear testers arxiv:physics/5118v1 [physics.comp-ph] 9 Nov 25 Dirk Kadau 1, Dominik Schwesig 1,2, Jörg Theuerkauf
GRANMA manuscript No. (will be inserted by the editor) Influence of particle elasticity in shear testers arxiv:physics/5118v1 [physics.comp-ph] 9 Nov 25 Dirk Kadau 1, Dominik Schwesig 1,2, Jörg Theuerkauf
STEP Support Programme. Mechanics STEP Questions
 STEP Support Programme Mechanics STEP Questions This is a selection of mainly STEP I questions with a couple of STEP II questions at the end. STEP I and STEP II papers follow the same specification, the
STEP Support Programme Mechanics STEP Questions This is a selection of mainly STEP I questions with a couple of STEP II questions at the end. STEP I and STEP II papers follow the same specification, the
IMPACT PROPERTY AND POST IMPACT VIBRATION BETWEEN TWO IDENTICAL SPHERES
 ICSV4 Cairns Australia 9- July, 7 IMPACT PROPERTY AND POST IMPACT VIBRATION BETWEEN TWO IDENTICAL SPHERES Hirofumi MINAMOTO, Keisuke SAITOH and Shozo KAWAMURA Toyohashi University of Technology Dept. of
ICSV4 Cairns Australia 9- July, 7 IMPACT PROPERTY AND POST IMPACT VIBRATION BETWEEN TWO IDENTICAL SPHERES Hirofumi MINAMOTO, Keisuke SAITOH and Shozo KAWAMURA Toyohashi University of Technology Dept. of
Earthquake response analysis of rock-fall models by discontinuous deformation analysis
 c Earthquake response analysis of rock-fall models by discontinuous deformation analysis T. Sasaki, I. Hagiwara & K. Sasaki Rock Engineering Lab., Suncoh Consultants Co. Ltd., Tokyo, Japan R. Yoshinaka
c Earthquake response analysis of rock-fall models by discontinuous deformation analysis T. Sasaki, I. Hagiwara & K. Sasaki Rock Engineering Lab., Suncoh Consultants Co. Ltd., Tokyo, Japan R. Yoshinaka
GAME PHYSICS SECOND EDITION. дяййтаййг 1 *
 GAME PHYSICS SECOND EDITION DAVID H. EBERLY дяййтаййг 1 * К AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO MORGAN ELSEVIER Morgan Kaufmann Publishers
GAME PHYSICS SECOND EDITION DAVID H. EBERLY дяййтаййг 1 * К AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO MORGAN ELSEVIER Morgan Kaufmann Publishers
Physics for Scientists and Engineers 4th Edition, 2017
 A Correlation of Physics for Scientists and Engineers 4th Edition, 2017 To the AP Physics C: Mechanics Course Descriptions AP is a trademark registered and/or owned by the College Board, which was not
A Correlation of Physics for Scientists and Engineers 4th Edition, 2017 To the AP Physics C: Mechanics Course Descriptions AP is a trademark registered and/or owned by the College Board, which was not
arxiv:cond-mat/ v1 [cond-mat.soft] 29 Nov 2002
![arxiv:cond-mat/ v1 [cond-mat.soft] 29 Nov 2002](/thumbs/90/104138478.jpg "arxiv:cond-mat/ v1 [cond-mat.soft] 29 Nov 2002") arxiv:cond-mat/0211696v1 [cond-mat.soft] 29 Nov 2002 The contact dynamics method for granular media Tamás Unger and János Kertész Department of Theoretical Physics, Budapest University of Technology and
arxiv:cond-mat/0211696v1 [cond-mat.soft] 29 Nov 2002 The contact dynamics method for granular media Tamás Unger and János Kertész Department of Theoretical Physics, Budapest University of Technology and