Graphical Models Chris Bishop
|
|
|
- Conrad Eaton
- 6 years ago
- Views:
Transcription

1 Graphical Models Chris Bishop Microsoft Research Cambridge Machine Learning Summer School 2013, Tübingen


2 Chapter 8: Graphical Models (PDF download)
3
4
5 1. Introduction
6 Traditional machine learning K-means clustering logistic regression random forest neural networks support vector machines Markov random field RVM Gaussian mixture Kalman filter HMM principal components deep networks kernel PCA ICA linear regression Radial basis functions Gaussian process factor analysis Boltzmann machines decision trees
7

8

9


10 infra-red emitter infra-red camera



11
")
12 (w 1, w 2, w N )
 where x i = x i + Δ/d(x i ) i Δ i i Δ Δ Δ i i i i i input depth image")
13 Fast depth image features Depth comparisons: f(x i ; Δ) = d(x i ) d(x i ) where x i = x i + Δ/d(x i ) i Δ i i Δ Δ Δ i i i i i input depth image
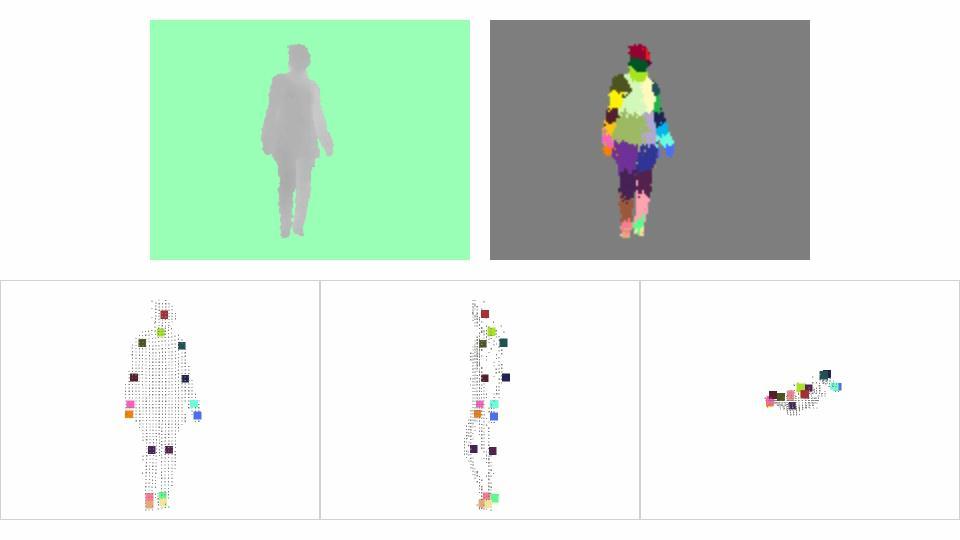
14
15 2. Model-based Machine Learning
16 Model-based machine learning Goal: A single development framework which supports the creation of a wide range of bespoke models Traditional: how do I map my problem into standard tools? Model-based: what is the model that represents my problem?
17 Potential benefits of MBML Models optimised for each new application Transparent functionality Models expressed as compact code Community of model builders Segregate model from training/inference code Newcomers learn one modelling environment Does the right thing automatically
18 Intelligent software Goal: software that can adapt, learn, and reason Player skill Movie preferences Words Game result Ratings Can be described by a model Ink









19 Intelligent software Goal: software that can adapt, learn, and reason Player skill Movie preferences Words Game result Ratings Reasoning backwards Ink
20 3. Uncertainty
21 Handling uncertainty We are uncertain about a player s skill Each result provides relevant information But we are never completely certain How can we compute with uncertainty in a principled way?
22 Uncertainty everywhere Which movie should the user watch next? Which word did the user write? What did the user say? Which web page is the user trying to find? Which link will user click on? What kind of product does the user wish to buy? Which gesture is the user making? Many others
23 Probability Limit of infinite number of trials Quantification of uncertainty 60% 40%
24 Movie Recommender Demo Matchbox

25 Xbox Live Recommendation Over 50M users Serves more than 100M requests per day Spans verticals: games, TV programmes, movies
26 4. Probabilities
27 A murder mystery A fiendish murder has been committed Whodunit? There are two suspects: the Butler the Cook There are three possible murder weapons: a butcher s Knife a Pistol a fireplace Poker
28 Prior distribution Butler has served family well for many years Cook hired recently, rumours of dodgy history P(Culprit = Butler) = 20% P(Culprit = Cook) = 80% Probabilities add to 100% P(Culprit) This is called a factor graph (we ll see why later) Culprit = {Butler, Cook}
29 Conditional distribution Butler is ex-army, keeps a gun in a locked drawer Cook has access to lots of knives Butler is older and getting frail P(Weapon Culprit)
30 Factor graph P(Culprit) Prior distribution Culprit = {Butler, Cook} Conditional distribution P(Weapon Culprit) Weapon = {Pistol, Knife, Poker}
31 Joint distribution What is the probability that the Cook committed the murder using the Pistol? P(Culprit = Cook) = 80% P(Weapon = Pistol Culprit = Cook) = 5% P(Weapon = Pistol, Culprit = Cook) = 80% x 5% = 4% Likewise for the other five combinations of Culprit and Weapon
32 Joint distribution = 100% P(Weapon, Culprit) = P(Weapon Culprit) P(Culprit) P x, y = P y x P(x) Product rule
33 Factor graphs P(Culprit) Culprit = {Butler, Cook} P(Weapon Culprit) Generative model Weapon = {Pistol, Knife, Poker} P(Weapon, Culprit) = P(Weapon Culprit) P(Culprit)
34 Generative viewpoint Murderer Cook Butler Cook Cook Cook Butler Cook Cook Butler Cook Weapon Knife Knife Pistol Poker Knife Pistol Poker Knife Pistol Knife
35 Marginal distribution of Culprit P x = y P x, y Sum rule
36 Marginal distribution of Weapon P x = y P x, y Sum rule
37 Posterior distribution We discover a Pistol at the scene of the crime = 20% = 80% This looks bad for the Butler!
38 Generative viewpoint Murderer Cook Butler Cook Cook Cook Butler Cook Cook Butler Cook Weapon Knife Knife Pistol Poker Knife Pistol Poker Knife Pistol Knife
39 Reasoning backwards Culprit Weapon
40 Bayes theorem posterior P x, y = P y x P x = P x y P(y) likelihood P x y P(y) P y x = P(x) prior Prior belief before making a particular obs. Posterior belief after making the obs. Posterior is the prior for the next observation Intrinsically incremental


41 Two views of probability Frequency: limit of infinite number of trials Bayesian: quantification of uncertainty
42 The Rules of Probability Sum rule P x = P x, y Product rule y P x, y = P y x P(x) Bayes theorem Denominator P y x = P x = y P x y P(y) P(x) P x y)p(y


43
44 5. Directed Graphs
45 Probabilistic Graphical Models Combine probability theory with graphs new insights into existing models framework for designing new models Graph-based algorithms for calculation and computation (c.f. Feynman diagrams in physics) efficient software implementation
46 Three types of graphical model Directed graphs useful for designing models Undirected graphs good for some domains, e.g. computer vision Factor graphs useful for inference and learning
47 Decomposition Consider an arbitrary joint distribution By successive application of the product rule:
48 Directed Graphs Arrows may indicate causal relationships
49 Special cases PCA, ICA, factor analysis, linear regression, logistic regression, mixture models Kalman filters, hidden Markov models

50 We re hiring! Interns, Postdocs, Researchers, Developers
51 6. Conditional Independence
52 Conditional Independence
53 Conditional Independence: Example 1
54 Conditional Independence: Example 1
55 Conditional Independence: Example 2

56 Conditional Independence: Example 2
57 Conditional Independence: Example 3
58 Conditional Independence: Example 3
59 D-separation
60 Two coins p(h) = 1/2 p(h) = 1/2 Coin 1 {H,T} Coin 2 {H,T} Both heads {true, false}
61 What is the probability of two heads? p(h) = 1/2 p(h) = 1/2 Coin 1 {H,T} Coin 2 {H,T} Generative model Coin 1 T T H H Coin 2 T H T H Both heads false false false true Both heads {true, false} p(true) = 1/4

62 Reasoning backwards p(h) = 1/3 p(h) = 1/3 Coin 1 {H,T} Coin 2 {H,T} false Inference Both heads {true, false} Coin 1 T T H H Coin 2 T H T H Both heads false false false true
63 Reasoning backwards p(h) = 1/2 Coin 1 {H,T} tails Coin 2 {H,T} false Both heads {true, false} Coin 1 T T H H Coin 2 T H T H Both heads false false false true
64 Reasoning backwards p(h) = 0 Coin 1 {H,T} heads Coin 2 {H,T} false Both heads {true, false} Coin 1 T T H H Coin 2 T H T H Both heads false false false true Explaining away
65 7. Undirected Graphs

66 Undirected Graphs Markov random fields


67 Factorization Clique Maximal Clique M K-state variables K M terms in Z


68 Illustration: Image De-Noising

69


70
71 Directed versus Undirected
72 8. Factor Graphs

73 Factorization Directed graphs: Undirected graphs: Both have the form of products of factors:

74 Factor Graphs

75 From Directed Graph to Factor Graph
76 9. Inference
77 Efficient inference
78 The Sum-Product Algorithm u f 1 (u, w) w f 2 (w, x) x f 3 (x, y) f 4 (x, z) y z
79
80
81

82 The Sum-Product Algorithm Three update equations Message schedule from root to leaves and back One message in each direction on each link
83 What if the graph is not a tree? Condition on variables to break loops cut-set conditioning (exact) Transform graph into tree of composite nodes junction tree algorithm (exact) Approximate: keep iterating the messages: loopy belief propagation (approximate)
84 What if the messages are intractable? True distribution Monte Carlo Variational Message Passing Expectation propagation
85 Learning is just inference!
86 10. Example: Kalman filter
87 Hand location Noisy position sensor
88 Finding the true location x
89 The Gaussian distribution standard deviation σ variance σ 2 precision λ = 1/σ 2 mean μ
90 The multi-dimensional Gaussian
91 Learning the mean p(μ) μ p(x μ) x
92 Learning the mean μ x
93 Plates μ x N
94 μ

95 Hand tracking Noisy position sensor and moving hand

96 μ x t = 1 t = 2 t = 3 t = 4 The Kalman filter (The hidden Markov model)
97
98
99
100 What about the noise level? p(λ) λ p(μ) μ p(x μ, λ) x

101 The gamma distribution An example of a conjugate prior
102 Predictions p(λ) λ p(μ) μ p(x μ, λ) N x




103 current Big data? voltage
104
105 11. Case Study: TrueSkill
106 TrueSkill TM Ralf Herbrich, Tom Minka, and Thore Graepel (NIPS, 2007)

107 Elo International standard for chess grading A single rating for each player Limitations: not applicable to more than two players not applicable to team games
108 Stages of MBML 1. Build a model: joint probability distribution of all of the relevant variables (e.g. as a graph) 2. Incorporate the observed data 3. Compute the distributions over the desired variables: inference Iterate 2 and 3 in real-time applications Extend model as required
109 Gaussian Gaussian s 1 s 2 Gaussian Gaussian 1 2 I( 1 > 2 ) y 12
110 s 1 s y 12
111 s 1 s y 12
112 s 1 s y 12


113 Expectation propagation (EP)
 SQLWildman")
 0 0 100 200 300 400 Number of")
114 Level Convergence char (TrueSkill ) SQLWildman (TrueSkill ) 5 char (Elo) SQLWildman (Elo) Number of Games
115 13. Probabilistic Programming
116 CSOFT A representation language for probabilistic models. Takes C# and adds support for: random variables constraints on variables inference Can be embedded in ordinary C# to allow integration of deterministic + stochastic code
117 Random variables Normal variables have a fixed single value int length=6 Random variables have a probability distribution int length = random(uniform(0,10))
118 Constraints Constraints on random variables constrain(visible==true) constrain(length==4) constrain(length>0) constrain(i==j)
119 Inference Compute posterior distribution int i = random(uniform(1,10)); bool b = (i*i>50); Dist bdist = infer(b); //Bernoulli(0.3)
120 Random variables Probabilistic program double x = random(gaussian(0,1)); Graphical model Gaussian(0,1) x
121 Bayesian networks Probabilistic program double x = random(gaussian(0,1)); double y = random(gamma(1,1)); double z = random(gaussian(x,y)); Graphical model Gaussian(0,1) Gamma(1,1)) x y Gaussian z
122 Loops plates Probabilistic program double x = random(gaussian(0,1)); double y = random(gamma(1,1)); for(int i=0;i<10;i++) { double z = random(gaussian(x,y)); } Graphical model Gaussian(0,1) Gamma(1,1)) x y Gaussian z i=0..9
123 If statement gates Probabilistic program bool b = random(bernoulli(0.5)); double x; if (b) { x = random(gaussian(0,1)); } else { x = random(gaussian(10,1)); } Graphical model Bernoulli(0.5) b T Gaussian(0,1) F Gaussian(10,1) x Gates (Minka and Winn, NIPS 2008)
124 Other language features Probabilistic program Functions/recursion Indexing Jagged arrays Mutation: x=x+1 Objects... Graphical model No common equivalent
125 Sampling interpretation Imagine running program many times, where random(dist) draws a random number from dist constrain(b) stops the run if b is not true infer(x) accumulates the value of x into memory
126 John Winn, Tom Minka, John Guiver, et al.







127 How Infer.NET works Probabilistic program (model) Observed values Inference Engine Infer.NET compiler C# C# compiler Algorithm Algorithm execution Probability distributions
128 Standard models supported Mixture models Factor analysis / PCA / ICA Logistic regression Discrete Bayesian networks Hidden Markov models Ranking models Kalman filters Hierarchical models

129 s 1 s y 12
130 // model variables Variable<double> skill1, skill2; Variable<double> performance1, performance2; Gaussian skillposterior1, skillposterior2; // model skill1 = Variable.GaussianFromMeanAndPrecision(0, 1); skill2 = Variable.GaussianFromMeanAndPrecision(0, 1); performance1 = Variable.GaussianFromMeanAndPrecision(skill1, beta); performance2 = Variable.GaussianFromMeanAndPrecision(skill2, beta); Variable.ConstrainPositive(performance1 performance2); // infer new posterior skills InferenceEngine engine = new InferenceEngine(); skillposterior1 = engine.infer<gaussian>(skill1); skillposterior2 = engine.infer<gaussian>(skill2);

131 Extension to Multiple players s 1 s 2 s y 12 y 23
132 // model variables Variable<double> skill1, skill2, skill3; Variable<double> performance1, performance2, performance3; Gaussian skillposterior1,skillposterior2, skillposterior3; // model skill1 = Variable.GaussianFromMeanAndPrecision(0, 1); skill2 = Variable.GaussianFromMeanAndPrecision(0, 1); skill3 = Variable.GaussianFromMeanAndPrecision(0, 1); performance1 = Variable.GaussianFromMeanAndPrecision(skill1, beta); performance2 = Variable.GaussianFromMeanAndPrecision(skill2, beta); performance3 = Variable.GaussianFromMeanAndPrecision(skill3, beta); Variable.ConstrainPositive(performance1 - performance2); Variable.ConstrainPositive(performance2 - performance3); // infer new posterior skills InferenceEngine engine = new InferenceEngine(); skillposterior1 = engine.infer<gaussian>(skill1); skillposterior2 = engine.infer<gaussian>(skill2); skillposterior3 = engine.infer<gaussian>(skill3);

133 Extension to Teams s 1 s 2 s 3 s y 12
134 // model variables Variable<double> skill1, skill2, skill3, skill4; Variable<double> performance1, performance2, performance3, performance4; Gaussian skillposterior1,skillposterior2, skillposterior3, skillposterior4; // model skill1 = Variable.GaussianFromMeanAndPrecision(0, 1); skill2 = Variable.GaussianFromMeanAndPrecision(0, 1); skill3 = Variable.GaussianFromMeanAndPrecision(0, 1); skill4 = Variable.GaussianFromMeanAndPrecision(0, 1); performance1 = Variable.GaussianFromMeanAndPrecision(skill1 + skill2, beta); performance2 = Variable.GaussianFromMeanAndPrecision(skill3 + skill4, beta); Variable.ConstrainPositive(performance1 - performance2); // infer new posterior skills InferenceEngine engine = new InferenceEngine(); skillposterior1 = engine.infer<gaussian>(skill1); skillposterior2 = engine.infer<gaussian>(skill2); skillposterior3 = engine.infer<gaussian>(skill3); skillposterior4 = engine.infer<gaussian>(skill4);
135 TrueSkill TM through time s 1 s 2 ~ ~ s 1 s ~ ~ 1 2 y 12 ~ y 12
136 // model variables Variable<double> skill1, skill2; Variable<double> performance1, performance2; Gaussian skillposterior1, skillposterior2; // model skill1 = Variable.GaussianFromMeanAndPrecision(oldskill1, alpha); skill2 = Variable.GaussianFromMeanAndPrecision(oldskill2, alpha); performance1 = Variable.GaussianFromMeanAndPrecision(skill1, beta); performance2 = Variable.GaussianFromMeanAndPrecision(skill2,beta); Variable.ConstrainPositive(performance1 - performance2); // infer new posterior skills InferenceEngine engine = new InferenceEngine(); skillposterior1 = engine.infer<gaussian>(skill1); skillposterior2 = engine.infer<gaussian>(skill2);












137 Skill estimate ChessBase Analysis: M game outcomes 20 million variables (200,000 players in each year of lifetime + latent variables) 40 million factors 3000 Garry Kasparov Robert James Fischer Anatoly Karpov 2400 Paul Morphy Mikhail Botvinnik 2200 Whilhelm Steinitz Boris V Spassky 2000 Emanuel Lasker Adolf Anderssen Jose Raul Capablanca Year


138
139 Any questions?

140
Probability. Raul Queiroz Feitosa
 Probability These slides are mostly inspired on slides from Christofer Bishop www.computervisiontalks.com/graphical-models-1-christopher-bishop-mlss-2013-tubingen/ Raul Queiroz Feitosa Objective Recall
Probability These slides are mostly inspired on slides from Christofer Bishop www.computervisiontalks.com/graphical-models-1-christopher-bishop-mlss-2013-tubingen/ Raul Queiroz Feitosa Objective Recall
p L yi z n m x N n xi
 y i z n x n N x i Overview Directed and undirected graphs Conditional independence Exact inference Latent variables and EM Variational inference Books statistical perspective Graphical Models, S. Lauritzen
y i z n x n N x i Overview Directed and undirected graphs Conditional independence Exact inference Latent variables and EM Variational inference Books statistical perspective Graphical Models, S. Lauritzen
Automating variational inference for statistics and data mining
 Automating variational inference for statistics and data mining Tom Minka Machine Learning and Perception Group Microsoft Research Cambridge A common situation You have a dataset Some models in mind Want
Automating variational inference for statistics and data mining Tom Minka Machine Learning and Perception Group Microsoft Research Cambridge A common situation You have a dataset Some models in mind Want
Pattern Recognition and Machine Learning
 Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Probabilistic Programming with Infer.NET. John Bronskill University of Cambridge 19 th October 2017
 Probabilistic Programming with Infer.NET John Bronskill University of Cambridge 19 th October 2017 The Promise of Probabilistic Programming We want to do for machine learning what the advent of high-level
Probabilistic Programming with Infer.NET John Bronskill University of Cambridge 19 th October 2017 The Promise of Probabilistic Programming We want to do for machine learning what the advent of high-level
Approximate Inference Part 1 of 2
 Approximate Inference Part 1 of 2 Tom Minka Microsoft Research, Cambridge, UK Machine Learning Summer School 2009 http://mlg.eng.cam.ac.uk/mlss09/ Bayesian paradigm Consistent use of probability theory
Approximate Inference Part 1 of 2 Tom Minka Microsoft Research, Cambridge, UK Machine Learning Summer School 2009 http://mlg.eng.cam.ac.uk/mlss09/ Bayesian paradigm Consistent use of probability theory
Approximate Inference Part 1 of 2
 Approximate Inference Part 1 of 2 Tom Minka Microsoft Research, Cambridge, UK Machine Learning Summer School 2009 http://mlg.eng.cam.ac.uk/mlss09/ 1 Bayesian paradigm Consistent use of probability theory
Approximate Inference Part 1 of 2 Tom Minka Microsoft Research, Cambridge, UK Machine Learning Summer School 2009 http://mlg.eng.cam.ac.uk/mlss09/ 1 Bayesian paradigm Consistent use of probability theory
Approximate Inference in Practice Microsoft s Xbox TrueSkill TM
 1 Approximate Inference in Practice Microsoft s Xbox TrueSkill TM Daniel Hernández-Lobato Universidad Autónoma de Madrid 2014 2 Outline 1 Introduction 2 The Probabilistic Model 3 Approximate Inference
1 Approximate Inference in Practice Microsoft s Xbox TrueSkill TM Daniel Hernández-Lobato Universidad Autónoma de Madrid 2014 2 Outline 1 Introduction 2 The Probabilistic Model 3 Approximate Inference
Bayesian Machine Learning
 Bayesian Machine Learning Andrew Gordon Wilson ORIE 6741 Lecture 4 Occam s Razor, Model Construction, and Directed Graphical Models https://people.orie.cornell.edu/andrew/orie6741 Cornell University September
Bayesian Machine Learning Andrew Gordon Wilson ORIE 6741 Lecture 4 Occam s Razor, Model Construction, and Directed Graphical Models https://people.orie.cornell.edu/andrew/orie6741 Cornell University September
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
ECE521 Tutorial 11. Topic Review. ECE521 Winter Credits to Alireza Makhzani, Alex Schwing, Rich Zemel and TAs for slides. ECE521 Tutorial 11 / 4
 ECE52 Tutorial Topic Review ECE52 Winter 206 Credits to Alireza Makhzani, Alex Schwing, Rich Zemel and TAs for slides ECE52 Tutorial ECE52 Winter 206 Credits to Alireza / 4 Outline K-means, PCA 2 Bayesian
ECE52 Tutorial Topic Review ECE52 Winter 206 Credits to Alireza Makhzani, Alex Schwing, Rich Zemel and TAs for slides ECE52 Tutorial ECE52 Winter 206 Credits to Alireza / 4 Outline K-means, PCA 2 Bayesian
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2014
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2014 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2014 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
Recent Advances in Bayesian Inference Techniques
 Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2016
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Machine Learning Techniques for Computer Vision
 Machine Learning Techniques for Computer Vision Part 2: Unsupervised Learning Microsoft Research Cambridge x 3 1 0.5 0.2 0 0.5 0.3 0 0.5 1 ECCV 2004, Prague x 2 x 1 Overview of Part 2 Mixture models EM
Machine Learning Techniques for Computer Vision Part 2: Unsupervised Learning Microsoft Research Cambridge x 3 1 0.5 0.2 0 0.5 0.3 0 0.5 1 ECCV 2004, Prague x 2 x 1 Overview of Part 2 Mixture models EM
Part 1: Expectation Propagation
 Chalmers Machine Learning Summer School Approximate message passing and biomedicine Part 1: Expectation Propagation Tom Heskes Machine Learning Group, Institute for Computing and Information Sciences Radboud
Chalmers Machine Learning Summer School Approximate message passing and biomedicine Part 1: Expectation Propagation Tom Heskes Machine Learning Group, Institute for Computing and Information Sciences Radboud
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 295-P, Spring 213 Prof. Erik Sudderth Lecture 11: Inference & Learning Overview, Gaussian Graphical Models Some figures courtesy Michael Jordan s draft
Probabilistic Graphical Models Brown University CSCI 295-P, Spring 213 Prof. Erik Sudderth Lecture 11: Inference & Learning Overview, Gaussian Graphical Models Some figures courtesy Michael Jordan s draft
Chris Bishop s PRML Ch. 8: Graphical Models
 Chris Bishop s PRML Ch. 8: Graphical Models January 24, 2008 Introduction Visualize the structure of a probabilistic model Design and motivate new models Insights into the model s properties, in particular
Chris Bishop s PRML Ch. 8: Graphical Models January 24, 2008 Introduction Visualize the structure of a probabilistic model Design and motivate new models Insights into the model s properties, in particular
Graphical Models and Kernel Methods
 Graphical Models and Kernel Methods Jerry Zhu Department of Computer Sciences University of Wisconsin Madison, USA MLSS June 17, 2014 1 / 123 Outline Graphical Models Probabilistic Inference Directed vs.
Graphical Models and Kernel Methods Jerry Zhu Department of Computer Sciences University of Wisconsin Madison, USA MLSS June 17, 2014 1 / 123 Outline Graphical Models Probabilistic Inference Directed vs.
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 7 Approximate
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 7 Approximate
Introduction: MLE, MAP, Bayesian reasoning (28/8/13)
") STA561: Probabilistic machine learning Introduction: MLE, MAP, Bayesian reasoning (28/8/13) Lecturer: Barbara Engelhardt Scribes: K. Ulrich, J. Subramanian, N. Raval, J. O Hollaren 1 Classifiers In this
STA561: Probabilistic machine learning Introduction: MLE, MAP, Bayesian reasoning (28/8/13) Lecturer: Barbara Engelhardt Scribes: K. Ulrich, J. Subramanian, N. Raval, J. O Hollaren 1 Classifiers In this
Unsupervised Learning
 Unsupervised Learning Bayesian Model Comparison Zoubin Ghahramani zoubin@gatsby.ucl.ac.uk Gatsby Computational Neuroscience Unit, and MSc in Intelligent Systems, Dept Computer Science University College
Unsupervised Learning Bayesian Model Comparison Zoubin Ghahramani zoubin@gatsby.ucl.ac.uk Gatsby Computational Neuroscience Unit, and MSc in Intelligent Systems, Dept Computer Science University College
Probability and Information Theory. Sargur N. Srihari
 Probability and Information Theory Sargur N. srihari@cedar.buffalo.edu 1 Topics in Probability and Information Theory Overview 1. Why Probability? 2. Random Variables 3. Probability Distributions 4. Marginal
Probability and Information Theory Sargur N. srihari@cedar.buffalo.edu 1 Topics in Probability and Information Theory Overview 1. Why Probability? 2. Random Variables 3. Probability Distributions 4. Marginal
STA 4273H: Sta-s-cal Machine Learning
 STA 4273H: Sta-s-cal Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 2 In our
STA 4273H: Sta-s-cal Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 2 In our
An Introduction to Bayesian Machine Learning
 1 An Introduction to Bayesian Machine Learning José Miguel Hernández-Lobato Department of Engineering, Cambridge University April 8, 2013 2 What is Machine Learning? The design of computational systems
1 An Introduction to Bayesian Machine Learning José Miguel Hernández-Lobato Department of Engineering, Cambridge University April 8, 2013 2 What is Machine Learning? The design of computational systems
Undirected Graphical Models
 Outline Hong Chang Institute of Computing Technology, Chinese Academy of Sciences Machine Learning Methods (Fall 2012) Outline Outline I 1 Introduction 2 Properties Properties 3 Generative vs. Conditional
Outline Hong Chang Institute of Computing Technology, Chinese Academy of Sciences Machine Learning Methods (Fall 2012) Outline Outline I 1 Introduction 2 Properties Properties 3 Generative vs. Conditional
9/12/17. Types of learning. Modeling data. Supervised learning: Classification. Supervised learning: Regression. Unsupervised learning: Clustering
 Types of learning Modeling data Supervised: we know input and targets Goal is to learn a model that, given input data, accurately predicts target data Unsupervised: we know the input only and want to make
Types of learning Modeling data Supervised: we know input and targets Goal is to learn a model that, given input data, accurately predicts target data Unsupervised: we know the input only and want to make
Intelligent Systems:
 Intelligent Systems: Undirected Graphical models (Factor Graphs) (2 lectures) Carsten Rother 15/01/2015 Intelligent Systems: Probabilistic Inference in DGM and UGM Roadmap for next two lectures Definition
Intelligent Systems: Undirected Graphical models (Factor Graphs) (2 lectures) Carsten Rother 15/01/2015 Intelligent Systems: Probabilistic Inference in DGM and UGM Roadmap for next two lectures Definition
MODEL-LEARNER PATTERN
 Andy Gordon (MSR and University of Edinburgh) Joint work with Mihhail Aizatulin (OU), Johannes Borgström (Uppsala), Guillaume Claret (MSR), Thore Graepel (MSR), Aditya Nori (MSR), Sriram Rajamani (MSR),
Andy Gordon (MSR and University of Edinburgh) Joint work with Mihhail Aizatulin (OU), Johannes Borgström (Uppsala), Guillaume Claret (MSR), Thore Graepel (MSR), Aditya Nori (MSR), Sriram Rajamani (MSR),
A New Framework for Machine Learning
 A New Framework for Machine Learning Christopher M. Bishop Microsoft Research, Cambridge, U.K Christopher.Bishop@microsoft.com http://research.microsoft.com/ cmbishop Abstract. The last five years have
A New Framework for Machine Learning Christopher M. Bishop Microsoft Research, Cambridge, U.K Christopher.Bishop@microsoft.com http://research.microsoft.com/ cmbishop Abstract. The last five years have
27 : Distributed Monte Carlo Markov Chain. 1 Recap of MCMC and Naive Parallel Gibbs Sampling
 10-708: Probabilistic Graphical Models 10-708, Spring 2014 27 : Distributed Monte Carlo Markov Chain Lecturer: Eric P. Xing Scribes: Pengtao Xie, Khoa Luu In this scribe, we are going to review the Parallel
10-708: Probabilistic Graphical Models 10-708, Spring 2014 27 : Distributed Monte Carlo Markov Chain Lecturer: Eric P. Xing Scribes: Pengtao Xie, Khoa Luu In this scribe, we are going to review the Parallel
INTRODUCTION TO BAYESIAN INFERENCE PART 2 CHRIS BISHOP
 INTRODUCTION TO BAYESIAN INFERENCE PART 2 CHRIS BISHOP Personal Healthcare Revolution Electronic health records (CFH) Personal genomics (DeCode, Navigenics, 23andMe) X-prize: first $10k human genome technology
INTRODUCTION TO BAYESIAN INFERENCE PART 2 CHRIS BISHOP Personal Healthcare Revolution Electronic health records (CFH) Personal genomics (DeCode, Navigenics, 23andMe) X-prize: first $10k human genome technology
Probabilistic Graphical Models (I)
") Probabilistic Graphical Models (I) Hongxin Zhang zhx@cad.zju.edu.cn State Key Lab of CAD&CG, ZJU 2015-03-31 Probabilistic Graphical Models Modeling many real-world problems => a large number of random
Probabilistic Graphical Models (I) Hongxin Zhang zhx@cad.zju.edu.cn State Key Lab of CAD&CG, ZJU 2015-03-31 Probabilistic Graphical Models Modeling many real-world problems => a large number of random
Variational Inference (11/04/13)
") STA561: Probabilistic machine learning Variational Inference (11/04/13) Lecturer: Barbara Engelhardt Scribes: Matt Dickenson, Alireza Samany, Tracy Schifeling 1 Introduction In this lecture we will further
STA561: Probabilistic machine learning Variational Inference (11/04/13) Lecturer: Barbara Engelhardt Scribes: Matt Dickenson, Alireza Samany, Tracy Schifeling 1 Introduction In this lecture we will further
Bayesian Networks Inference with Probabilistic Graphical Models
 4190.408 2016-Spring Bayesian Networks Inference with Probabilistic Graphical Models Byoung-Tak Zhang intelligence Lab Seoul National University 4190.408 Artificial (2016-Spring) 1 Machine Learning? Learning
4190.408 2016-Spring Bayesian Networks Inference with Probabilistic Graphical Models Byoung-Tak Zhang intelligence Lab Seoul National University 4190.408 Artificial (2016-Spring) 1 Machine Learning? Learning
13: Variational inference II
 10-708: Probabilistic Graphical Models, Spring 2015 13: Variational inference II Lecturer: Eric P. Xing Scribes: Ronghuo Zheng, Zhiting Hu, Yuntian Deng 1 Introduction We started to talk about variational
10-708: Probabilistic Graphical Models, Spring 2015 13: Variational inference II Lecturer: Eric P. Xing Scribes: Ronghuo Zheng, Zhiting Hu, Yuntian Deng 1 Introduction We started to talk about variational
Introduction to Graphical Models. Srikumar Ramalingam School of Computing University of Utah
 Introduction to Graphical Models Srikumar Ramalingam School of Computing University of Utah Reference Christopher M. Bishop, Pattern Recognition and Machine Learning, Jonathan S. Yedidia, William T. Freeman,
Introduction to Graphical Models Srikumar Ramalingam School of Computing University of Utah Reference Christopher M. Bishop, Pattern Recognition and Machine Learning, Jonathan S. Yedidia, William T. Freeman,
Probabilistic Graphical Models. Guest Lecture by Narges Razavian Machine Learning Class April
 Probabilistic Graphical Models Guest Lecture by Narges Razavian Machine Learning Class April 14 2017 Today What is probabilistic graphical model and why it is useful? Bayesian Networks Basic Inference
Probabilistic Graphical Models Guest Lecture by Narges Razavian Machine Learning Class April 14 2017 Today What is probabilistic graphical model and why it is useful? Bayesian Networks Basic Inference
Probabilistic Graphical Models
 2016 Robert Nowak Probabilistic Graphical Models 1 Introduction We have focused mainly on linear models for signals, in particular the subspace model x = Uθ, where U is a n k matrix and θ R k is a vector
2016 Robert Nowak Probabilistic Graphical Models 1 Introduction We have focused mainly on linear models for signals, in particular the subspace model x = Uθ, where U is a n k matrix and θ R k is a vector
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
NPFL108 Bayesian inference. Introduction. Filip Jurčíček. Institute of Formal and Applied Linguistics Charles University in Prague Czech Republic
 NPFL108 Bayesian inference Introduction Filip Jurčíček Institute of Formal and Applied Linguistics Charles University in Prague Czech Republic Home page: http://ufal.mff.cuni.cz/~jurcicek Version: 21/02/2014
NPFL108 Bayesian inference Introduction Filip Jurčíček Institute of Formal and Applied Linguistics Charles University in Prague Czech Republic Home page: http://ufal.mff.cuni.cz/~jurcicek Version: 21/02/2014
Introduction to Graphical Models
 Introduction to Graphical Models The 15 th Winter School of Statistical Physics POSCO International Center & POSTECH, Pohang 2018. 1. 9 (Tue.) Yung-Kyun Noh GENERALIZATION FOR PREDICTION 2 Probabilistic
Introduction to Graphical Models The 15 th Winter School of Statistical Physics POSCO International Center & POSTECH, Pohang 2018. 1. 9 (Tue.) Yung-Kyun Noh GENERALIZATION FOR PREDICTION 2 Probabilistic
Expectation Propagation in Dynamical Systems
 Expectation Propagation in Dynamical Systems Marc Peter Deisenroth Joint Work with Shakir Mohamed (UBC) August 10, 2012 Marc Deisenroth (TU Darmstadt) EP in Dynamical Systems 1 Motivation Figure : Complex
Expectation Propagation in Dynamical Systems Marc Peter Deisenroth Joint Work with Shakir Mohamed (UBC) August 10, 2012 Marc Deisenroth (TU Darmstadt) EP in Dynamical Systems 1 Motivation Figure : Complex
Lecture 13 : Variational Inference: Mean Field Approximation
 10-708: Probabilistic Graphical Models 10-708, Spring 2017 Lecture 13 : Variational Inference: Mean Field Approximation Lecturer: Willie Neiswanger Scribes: Xupeng Tong, Minxing Liu 1 Problem Setup 1.1
10-708: Probabilistic Graphical Models 10-708, Spring 2017 Lecture 13 : Variational Inference: Mean Field Approximation Lecturer: Willie Neiswanger Scribes: Xupeng Tong, Minxing Liu 1 Problem Setup 1.1
Introduction to Machine Learning
 Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Mathematical Formulation of Our Example
 Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
CPSC 540: Machine Learning
 CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
Machine Learning Summer School
 Machine Learning Summer School Lecture 3: Learning parameters and structure Zoubin Ghahramani zoubin@eng.cam.ac.uk http://learning.eng.cam.ac.uk/zoubin/ Department of Engineering University of Cambridge,
Machine Learning Summer School Lecture 3: Learning parameters and structure Zoubin Ghahramani zoubin@eng.cam.ac.uk http://learning.eng.cam.ac.uk/zoubin/ Department of Engineering University of Cambridge,
Expectation Propagation Algorithm
 Expectation Propagation Algorithm 1 Shuang Wang School of Electrical and Computer Engineering University of Oklahoma, Tulsa, OK, 74135 Email: {shuangwang}@ou.edu This note contains three parts. First,
Expectation Propagation Algorithm 1 Shuang Wang School of Electrical and Computer Engineering University of Oklahoma, Tulsa, OK, 74135 Email: {shuangwang}@ou.edu This note contains three parts. First,
13 : Variational Inference: Loopy Belief Propagation and Mean Field
 10-708: Probabilistic Graphical Models 10-708, Spring 2012 13 : Variational Inference: Loopy Belief Propagation and Mean Field Lecturer: Eric P. Xing Scribes: Peter Schulam and William Wang 1 Introduction
10-708: Probabilistic Graphical Models 10-708, Spring 2012 13 : Variational Inference: Loopy Belief Propagation and Mean Field Lecturer: Eric P. Xing Scribes: Peter Schulam and William Wang 1 Introduction
Chapter 16. Structured Probabilistic Models for Deep Learning
 Peng et al.: Deep Learning and Practice 1 Chapter 16 Structured Probabilistic Models for Deep Learning Peng et al.: Deep Learning and Practice 2 Structured Probabilistic Models way of using graphs to describe
Peng et al.: Deep Learning and Practice 1 Chapter 16 Structured Probabilistic Models for Deep Learning Peng et al.: Deep Learning and Practice 2 Structured Probabilistic Models way of using graphs to describe
VIBES: A Variational Inference Engine for Bayesian Networks
 VIBES: A Variational Inference Engine for Bayesian Networks Christopher M. Bishop Microsoft Research Cambridge, CB3 0FB, U.K. research.microsoft.com/ cmbishop David Spiegelhalter MRC Biostatistics Unit
VIBES: A Variational Inference Engine for Bayesian Networks Christopher M. Bishop Microsoft Research Cambridge, CB3 0FB, U.K. research.microsoft.com/ cmbishop David Spiegelhalter MRC Biostatistics Unit
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
Bayesian Machine Learning - Lecture 7
 Bayesian Machine Learning - Lecture 7 Guido Sanguinetti Institute for Adaptive and Neural Computation School of Informatics University of Edinburgh gsanguin@inf.ed.ac.uk March 4, 2015 Today s lecture 1
Bayesian Machine Learning - Lecture 7 Guido Sanguinetti Institute for Adaptive and Neural Computation School of Informatics University of Edinburgh gsanguin@inf.ed.ac.uk March 4, 2015 Today s lecture 1
Markov localization uses an explicit, discrete representation for the probability of all position in the state space.
 Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Lecture : Probabilistic Machine Learning
 Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Black-box α-divergence Minimization
 Black-box α-divergence Minimization José Miguel Hernández-Lobato, Yingzhen Li, Daniel Hernández-Lobato, Thang Bui, Richard Turner, Harvard University, University of Cambridge, Universidad Autónoma de Madrid.
Black-box α-divergence Minimization José Miguel Hernández-Lobato, Yingzhen Li, Daniel Hernández-Lobato, Thang Bui, Richard Turner, Harvard University, University of Cambridge, Universidad Autónoma de Madrid.
Lecture 15. Probabilistic Models on Graph
 Lecture 15. Probabilistic Models on Graph Prof. Alan Yuille Spring 2014 1 Introduction We discuss how to define probabilistic models that use richly structured probability distributions and describe how
Lecture 15. Probabilistic Models on Graph Prof. Alan Yuille Spring 2014 1 Introduction We discuss how to define probabilistic models that use richly structured probability distributions and describe how
Introduction to Probabilistic Machine Learning
 Introduction to Probabilistic Machine Learning Piyush Rai Dept. of CSE, IIT Kanpur (Mini-course 1) Nov 03, 2015 Piyush Rai (IIT Kanpur) Introduction to Probabilistic Machine Learning 1 Machine Learning
Introduction to Probabilistic Machine Learning Piyush Rai Dept. of CSE, IIT Kanpur (Mini-course 1) Nov 03, 2015 Piyush Rai (IIT Kanpur) Introduction to Probabilistic Machine Learning 1 Machine Learning
Large-scale Ordinal Collaborative Filtering
 Large-scale Ordinal Collaborative Filtering Ulrich Paquet, Blaise Thomson, and Ole Winther Microsoft Research Cambridge, University of Cambridge, Technical University of Denmark ulripa@microsoft.com,brmt2@cam.ac.uk,owi@imm.dtu.dk
Large-scale Ordinal Collaborative Filtering Ulrich Paquet, Blaise Thomson, and Ole Winther Microsoft Research Cambridge, University of Cambridge, Technical University of Denmark ulripa@microsoft.com,brmt2@cam.ac.uk,owi@imm.dtu.dk
Bayesian Models in Machine Learning
 Bayesian Models in Machine Learning Lukáš Burget Escuela de Ciencias Informáticas 2017 Buenos Aires, July 24-29 2017 Frequentist vs. Bayesian Frequentist point of view: Probability is the frequency of
Bayesian Models in Machine Learning Lukáš Burget Escuela de Ciencias Informáticas 2017 Buenos Aires, July 24-29 2017 Frequentist vs. Bayesian Frequentist point of view: Probability is the frequency of
Deep learning / Ian Goodfellow, Yoshua Bengio and Aaron Courville. - Cambridge, MA ; London, Spis treści
 Deep learning / Ian Goodfellow, Yoshua Bengio and Aaron Courville. - Cambridge, MA ; London, 2017 Spis treści Website Acknowledgments Notation xiii xv xix 1 Introduction 1 1.1 Who Should Read This Book?
Deep learning / Ian Goodfellow, Yoshua Bengio and Aaron Courville. - Cambridge, MA ; London, 2017 Spis treści Website Acknowledgments Notation xiii xv xix 1 Introduction 1 1.1 Who Should Read This Book?
Markov Models. CS 188: Artificial Intelligence Fall Example. Mini-Forward Algorithm. Stationary Distributions.
 CS 88: Artificial Intelligence Fall 27 Lecture 2: HMMs /6/27 Markov Models A Markov model is a chain-structured BN Each node is identically distributed (stationarity) Value of X at a given time is called
CS 88: Artificial Intelligence Fall 27 Lecture 2: HMMs /6/27 Markov Models A Markov model is a chain-structured BN Each node is identically distributed (stationarity) Value of X at a given time is called
Lecture 6: Graphical Models: Learning
 Lecture 6: Graphical Models: Learning 4F13: Machine Learning Zoubin Ghahramani and Carl Edward Rasmussen Department of Engineering, University of Cambridge February 3rd, 2010 Ghahramani & Rasmussen (CUED)
Lecture 6: Graphical Models: Learning 4F13: Machine Learning Zoubin Ghahramani and Carl Edward Rasmussen Department of Engineering, University of Cambridge February 3rd, 2010 Ghahramani & Rasmussen (CUED)
Based on slides by Richard Zemel
 CSC 412/2506 Winter 2018 Probabilistic Learning and Reasoning Lecture 3: Directed Graphical Models and Latent Variables Based on slides by Richard Zemel Learning outcomes What aspects of a model can we
CSC 412/2506 Winter 2018 Probabilistic Learning and Reasoning Lecture 3: Directed Graphical Models and Latent Variables Based on slides by Richard Zemel Learning outcomes What aspects of a model can we
Bayesian Methods for Machine Learning
 Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
6.867 Machine learning, lecture 23 (Jaakkola)
") Lecture topics: Markov Random Fields Probabilistic inference Markov Random Fields We will briefly go over undirected graphical models or Markov Random Fields (MRFs) as they will be needed in the context
Lecture topics: Markov Random Fields Probabilistic inference Markov Random Fields We will briefly go over undirected graphical models or Markov Random Fields (MRFs) as they will be needed in the context
Part I. C. M. Bishop PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS
 Part I C. M. Bishop PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS Probabilistic Graphical Models Graphical representation of a probabilistic model Each variable corresponds to a
Part I C. M. Bishop PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS Probabilistic Graphical Models Graphical representation of a probabilistic model Each variable corresponds to a
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
ARTIFICIAL INTELLIGENCE. Uncertainty: probabilistic reasoning
 INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Uncertainty: probabilistic reasoning Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from
INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Uncertainty: probabilistic reasoning Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from
Variational Scoring of Graphical Model Structures
 Variational Scoring of Graphical Model Structures Matthew J. Beal Work with Zoubin Ghahramani & Carl Rasmussen, Toronto. 15th September 2003 Overview Bayesian model selection Approximations using Variational
Variational Scoring of Graphical Model Structures Matthew J. Beal Work with Zoubin Ghahramani & Carl Rasmussen, Toronto. 15th September 2003 Overview Bayesian model selection Approximations using Variational
Machine Learning. Bayes Basics. Marc Toussaint U Stuttgart. Bayes, probabilities, Bayes theorem & examples
 Machine Learning Bayes Basics Bayes, probabilities, Bayes theorem & examples Marc Toussaint U Stuttgart So far: Basic regression & classification methods: Features + Loss + Regularization & CV All kinds
Machine Learning Bayes Basics Bayes, probabilities, Bayes theorem & examples Marc Toussaint U Stuttgart So far: Basic regression & classification methods: Features + Loss + Regularization & CV All kinds
COMP 551 Applied Machine Learning Lecture 19: Bayesian Inference
 COMP 551 Applied Machine Learning Lecture 19: Bayesian Inference Associate Instructor: (herke.vanhoof@mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp551 Unless otherwise noted, all material posted
COMP 551 Applied Machine Learning Lecture 19: Bayesian Inference Associate Instructor: (herke.vanhoof@mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp551 Unless otherwise noted, all material posted
A graph contains a set of nodes (vertices) connected by links (edges or arcs)
 connected by links (edges or arcs)") BOLTZMANN MACHINES Generative Models Graphical Models A graph contains a set of nodes (vertices) connected by links (edges or arcs) In a probabilistic graphical model, each node represents a random variable,
BOLTZMANN MACHINES Generative Models Graphical Models A graph contains a set of nodes (vertices) connected by links (edges or arcs) In a probabilistic graphical model, each node represents a random variable,
Statistical Approaches to Learning and Discovery
 Statistical Approaches to Learning and Discovery Graphical Models Zoubin Ghahramani & Teddy Seidenfeld zoubin@cs.cmu.edu & teddy@stat.cmu.edu CALD / CS / Statistics / Philosophy Carnegie Mellon University
Statistical Approaches to Learning and Discovery Graphical Models Zoubin Ghahramani & Teddy Seidenfeld zoubin@cs.cmu.edu & teddy@stat.cmu.edu CALD / CS / Statistics / Philosophy Carnegie Mellon University
Machine Learning using Bayesian Approaches
 Machine Learning using Bayesian Approaches Sargur N. Srihari University at Buffalo, State University of New York 1 Outline 1. Progress in ML and PR 2. Fully Bayesian Approach 1. Probability theory Bayes
Machine Learning using Bayesian Approaches Sargur N. Srihari University at Buffalo, State University of New York 1 Outline 1. Progress in ML and PR 2. Fully Bayesian Approach 1. Probability theory Bayes
ECE521 Lecture 19 HMM cont. Inference in HMM
 ECE521 Lecture 19 HMM cont. Inference in HMM Outline Hidden Markov models Model definitions and notations Inference in HMMs Learning in HMMs 2 Formally, a hidden Markov model defines a generative process
ECE521 Lecture 19 HMM cont. Inference in HMM Outline Hidden Markov models Model definitions and notations Inference in HMMs Learning in HMMs 2 Formally, a hidden Markov model defines a generative process
Probabilistic Machine Learning
 Probabilistic Machine Learning Bayesian Nets, MCMC, and more Marek Petrik 4/18/2017 Based on: P. Murphy, K. (2012). Machine Learning: A Probabilistic Perspective. Chapter 10. Conditional Independence Independent
Probabilistic Machine Learning Bayesian Nets, MCMC, and more Marek Petrik 4/18/2017 Based on: P. Murphy, K. (2012). Machine Learning: A Probabilistic Perspective. Chapter 10. Conditional Independence Independent
Inference in Bayesian Networks
 Andrea Passerini passerini@disi.unitn.it Machine Learning Inference in graphical models Description Assume we have evidence e on the state of a subset of variables E in the model (i.e. Bayesian Network)
Andrea Passerini passerini@disi.unitn.it Machine Learning Inference in graphical models Description Assume we have evidence e on the state of a subset of variables E in the model (i.e. Bayesian Network)
STA414/2104. Lecture 11: Gaussian Processes. Department of Statistics
 STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
Bayesian RL Seminar. Chris Mansley September 9, 2008
 Bayesian RL Seminar Chris Mansley September 9, 2008 Bayes Basic Probability One of the basic principles of probability theory, the chain rule, will allow us to derive most of the background material in
Bayesian RL Seminar Chris Mansley September 9, 2008 Bayes Basic Probability One of the basic principles of probability theory, the chain rule, will allow us to derive most of the background material in
9 Forward-backward algorithm, sum-product on factor graphs
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.438 Algorithms For Inference Fall 2014 9 Forward-backward algorithm, sum-product on factor graphs The previous
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.438 Algorithms For Inference Fall 2014 9 Forward-backward algorithm, sum-product on factor graphs The previous
Introduction to Probabilistic Graphical Models: Exercises
 Introduction to Probabilistic Graphical Models: Exercises Cédric Archambeau Xerox Research Centre Europe cedric.archambeau@xrce.xerox.com Pascal Bootcamp Marseille, France, July 2010 Exercise 1: basics
Introduction to Probabilistic Graphical Models: Exercises Cédric Archambeau Xerox Research Centre Europe cedric.archambeau@xrce.xerox.com Pascal Bootcamp Marseille, France, July 2010 Exercise 1: basics
Introduction to Mobile Robotics Probabilistic Robotics
 Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Results: MCMC Dancers, q=10, n=500
 Motivation Sampling Methods for Bayesian Inference How to track many INTERACTING targets? A Tutorial Frank Dellaert Results: MCMC Dancers, q=10, n=500 1 Probabilistic Topological Maps Results Real-Time
Motivation Sampling Methods for Bayesian Inference How to track many INTERACTING targets? A Tutorial Frank Dellaert Results: MCMC Dancers, q=10, n=500 1 Probabilistic Topological Maps Results Real-Time
Announcements. CS 188: Artificial Intelligence Fall VPI Example. VPI Properties. Reasoning over Time. Markov Models. Lecture 19: HMMs 11/4/2008
 CS 88: Artificial Intelligence Fall 28 Lecture 9: HMMs /4/28 Announcements Midterm solutions up, submit regrade requests within a week Midterm course evaluation up on web, please fill out! Dan Klein UC
CS 88: Artificial Intelligence Fall 28 Lecture 9: HMMs /4/28 Announcements Midterm solutions up, submit regrade requests within a week Midterm course evaluation up on web, please fill out! Dan Klein UC
Probabilistic Machine Learning. Industrial AI Lab.
 Probabilistic Machine Learning Industrial AI Lab. Probabilistic Linear Regression Outline Probabilistic Classification Probabilistic Clustering Probabilistic Dimension Reduction 2 Probabilistic Linear
Probabilistic Machine Learning Industrial AI Lab. Probabilistic Linear Regression Outline Probabilistic Classification Probabilistic Clustering Probabilistic Dimension Reduction 2 Probabilistic Linear
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Bayesian Learning. HT2015: SC4 Statistical Data Mining and Machine Learning. Maximum Likelihood Principle. The Bayesian Learning Framework
 HT5: SC4 Statistical Data Mining and Machine Learning Dino Sejdinovic Department of Statistics Oxford http://www.stats.ox.ac.uk/~sejdinov/sdmml.html Maximum Likelihood Principle A generative model for
HT5: SC4 Statistical Data Mining and Machine Learning Dino Sejdinovic Department of Statistics Oxford http://www.stats.ox.ac.uk/~sejdinov/sdmml.html Maximum Likelihood Principle A generative model for
Machine Learning 4771
 Machine Learning 4771 Instructor: Tony Jebara Topic 16 Undirected Graphs Undirected Separation Inferring Marginals & Conditionals Moralization Junction Trees Triangulation Undirected Graphs Separation
Machine Learning 4771 Instructor: Tony Jebara Topic 16 Undirected Graphs Undirected Separation Inferring Marginals & Conditionals Moralization Junction Trees Triangulation Undirected Graphs Separation
Density Estimation. Seungjin Choi
 Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
CSC2535: Computation in Neural Networks Lecture 7: Variational Bayesian Learning & Model Selection
 CSC2535: Computation in Neural Networks Lecture 7: Variational Bayesian Learning & Model Selection (non-examinable material) Matthew J. Beal February 27, 2004 www.variational-bayes.org Bayesian Model Selection
CSC2535: Computation in Neural Networks Lecture 7: Variational Bayesian Learning & Model Selection (non-examinable material) Matthew J. Beal February 27, 2004 www.variational-bayes.org Bayesian Model Selection
Bayesian Networks BY: MOHAMAD ALSABBAGH
 Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Machine Learning. Probability Basics. Marc Toussaint University of Stuttgart Summer 2014
 Machine Learning Probability Basics Basic definitions: Random variables, joint, conditional, marginal distribution, Bayes theorem & examples; Probability distributions: Binomial, Beta, Multinomial, Dirichlet,
Machine Learning Probability Basics Basic definitions: Random variables, joint, conditional, marginal distribution, Bayes theorem & examples; Probability distributions: Binomial, Beta, Multinomial, Dirichlet,
Bayesian Approach 2. CSC412 Probabilistic Learning & Reasoning
 CSC412 Probabilistic Learning & Reasoning Lecture 12: Bayesian Parameter Estimation February 27, 2006 Sam Roweis Bayesian Approach 2 The Bayesian programme (after Rev. Thomas Bayes) treats all unnown quantities
CSC412 Probabilistic Learning & Reasoning Lecture 12: Bayesian Parameter Estimation February 27, 2006 Sam Roweis Bayesian Approach 2 The Bayesian programme (after Rev. Thomas Bayes) treats all unnown quantities
Belief Update in CLG Bayesian Networks With Lazy Propagation
 Belief Update in CLG Bayesian Networks With Lazy Propagation Anders L Madsen HUGIN Expert A/S Gasværksvej 5 9000 Aalborg, Denmark Anders.L.Madsen@hugin.com Abstract In recent years Bayesian networks (BNs)
Belief Update in CLG Bayesian Networks With Lazy Propagation Anders L Madsen HUGIN Expert A/S Gasværksvej 5 9000 Aalborg, Denmark Anders.L.Madsen@hugin.com Abstract In recent years Bayesian networks (BNs)
Advanced Introduction to Machine Learning
 10-715 Advanced Introduction to Machine Learning Homework 3 Due Nov 12, 10.30 am Rules 1. Homework is due on the due date at 10.30 am. Please hand over your homework at the beginning of class. Please see
10-715 Advanced Introduction to Machine Learning Homework 3 Due Nov 12, 10.30 am Rules 1. Homework is due on the due date at 10.30 am. Please hand over your homework at the beginning of class. Please see
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter