Department of Electrical and Computer Engineering Digital Speech Processing Homework No. 7 Solutions
|
|
|
- Erik Cross
- 5 years ago
- Views:
Transcription
1 Problem 1 Department of Electrical and Computer Engineering Digital Speech Processing Homework No. 7 Solutions Linear prediction analysis is used to obtain an eleventh-order all-pole model for a segment of voiced speech that was sampled at a rate of F S = 8000 samples/second. The system function of the model is: H(z) = G A(z) = G G = α k z k (1 z i z 1 ) k=1 Table 1 shows five of the roots of the eleventh-order prediction error filter, A(z). i z i z i (rad) Table 1: Root locations of eleventh-order prediction error filter in the z-plane. (a) Determine where the other six zeros of A(z) are located in the z-plane. If you cannot precisely determine the pole locations, explain where the pole might occur in the z-plane. (b) Estimate the first three formant frequencies (in Hz) for this segment of speech. (c) Which of the first three formant resonances has the smallest bandwidth? How is this determined? (d) Plot and label the frequency response due to just the first three formants of the all-pole model for the (analog) frequency range 0 f F S /2. Solution (a) Since the five roots of Table 1 are all complex, 5 of the remaining roots occur at the complex conjugate locations. The remaining root must be real and occurs on the z-axis and is generally inside the unit circle. (b) The locations of the formants are determined by the complex roots that are closest to the unit circle, namely with magnitudes close to 1.0. If we order these roots we can estimate the formant frequencies by multiplying the root angle (in radians) by the sampling rate and then dividing by the factor 2π to convert from radians to analog frequency. Using this method we obtain the following formant estimates: i=1 1
2 1. F 1 = (z 3 ) F S /(2π) = /(2π) = 350 Hz 2. F 2 = (z 2 ) F S /(2π) = /(2π) = 1834 Hz 3. F 3 = (z 5 ) F S /(2π) = /(2π) = 3076 Hz There is a choice of the fourth or fifth root as the best estimate of the third formant. However since the fifth root is much closer to the unit circle ( z 5 = ) than the fourth root ( z 4 = ), the fifth root is a better candidate for the third formant. (c) The formant with the smallest bandwidth is the pole which is closest to the unit circle, namely the first formant which has a magnitude of (d) Figure 1 shows a plot of the log magnitude spectrum of the cascade of the first three resonances at the complex pole locations chosen for the three formants, with a transfer function: H(z) = 3 1 2r i cos(θ i ) + ri 2 1 2r i cos(θ i )z 1 + ri 2z 2 i=1 where r i and θ i are the formant magnitudes and angles (in radians) for the first three formants. Figure 1: Plot of log magnitude response of system consisting of 3 formant resonances. Problem 2 An unvoiced speech signal segment can be modeled as a segment of a stationary random process of the form: x[n] = w[n] + βw[n 1] where w[n] is a zero mean, unit variance, stationary white noise process and β < 1. (a) What are the mean and variance of x[n]? (b) What system can be used to recover w[n] from x[n]? 2
3 (c) What is the normalized autocorrelation of x[n] at a delay of 1 sample, i.e., what is r x [1] = R x[1] R x [0]? Solution (a) The mean and variance are calculated as: x[n] = w[n] + bw[n 1] = 0 (since w[n] is a zero-mean process) x 2 [n] = (w[n] + βw[n 1]) 2 = w 2 [n] + 2βw[n] w[n 1] + β 2 w 2 [n 1] = σ 2 w + β 2 σ 2 w = (1 + β 2 )σ 2 w = (1 + β 2 ) (b) The transfer function from w[n] to x[n] is: H 1 (z) = X(z) W (z) = 1 + βz 1 To recover w[n] we need to s x[n] through the inverse system, of the form: (c) The correlation of x[n] is: R x [k] = E{x[n]x[n + k]} H 2 (z) = W (z) X(z) = βz 1 = E{(w[n] + βw[n 1]) (w[n + k] + βw[n + k 1])} = E{w[n]w[n + k]} + βe{w[n 1]w[n + k] + w[n]w[n + k 1]} + β 2 E{w[n 1]w[n + k 1]} = δ[k] + βδ[k 1] + βδ[k + 1] + β 2 δ[k] = (1 + β 2 )δ[k] + βδ[k 1] + βδ[k + 1] giving the final result: r x [1] = R x[1] R x [0] = β 1 + β 2 Problem 3 A causal LTI system has system function: H(z) = 1 4z z z z 3 (a) Use the Levinson recursion to determine whether or not the system is stable. (b) Is the system minimum phase? Solution 3
4 To determine stability, we need to find out if the denominator polynomial has all of its roots inside the unit circle. Consider the denominator polynomial: A(z) = z z z 3 = 1 α (3) 1 z 1 α (3) 2 z 2 α (3) 3 z 3 to be a prediction error filter; therefore we can convert from a i to k i using the backward iteration: k i = a (i) i i = p, p 1,..., 1 α (i 1) j = [α (i) j + α (i) i α (i) i j ]/(1 k2 i ) 1 j i 1 (a) Thus we compute the values of k i using the backward iteration: k 3 = α (3) 3 = α (2) 1 = [α (3) 1 + α (3) 3 α(3) 2 ]/(1 k2 3) = (0.875)(0.75) 1 (0.875) 2 = 3.84 α (2) 2 = [α (3) 2 + α (3) 3 α(3) 1 ]/( (0.875)(0.25) k2 3) = 1 (0.875) 2 = 4.13 k 2 = α (2) 2 = 4.13 α (1) 1 = [α (2) 1 + α (2) 2 α(2) 1 ]/(1 k2 2) = k 1 = α (1) 1 = (4.13)(3.84) 1 (4.13) 2 = 1.23 Since k i > 1 for k 2 and k 1, the system is unstable. (b) The system is not minimum phase since there is a zero at z = 4, which is outside the unit circle, as well as poles outside the unit circle. Problem 4 A speech signal frame (windowed using a Hamming window) has energy: E (0) n = m s 2 n[m] = 2000 Using the autocorrelation method of analysis on this speech frame, the first 3 PARCOR coefficients are computed and their values are: k 1 = 0.5 k 2 = 0.5 k 3 = 0.2 Find the energy of the linear prediction residual, En 3 = e 2 n[m] that would be m obtained by inverse filtering s n [m] by the optimal third order predictor inverse filter, A 3 (z). 4
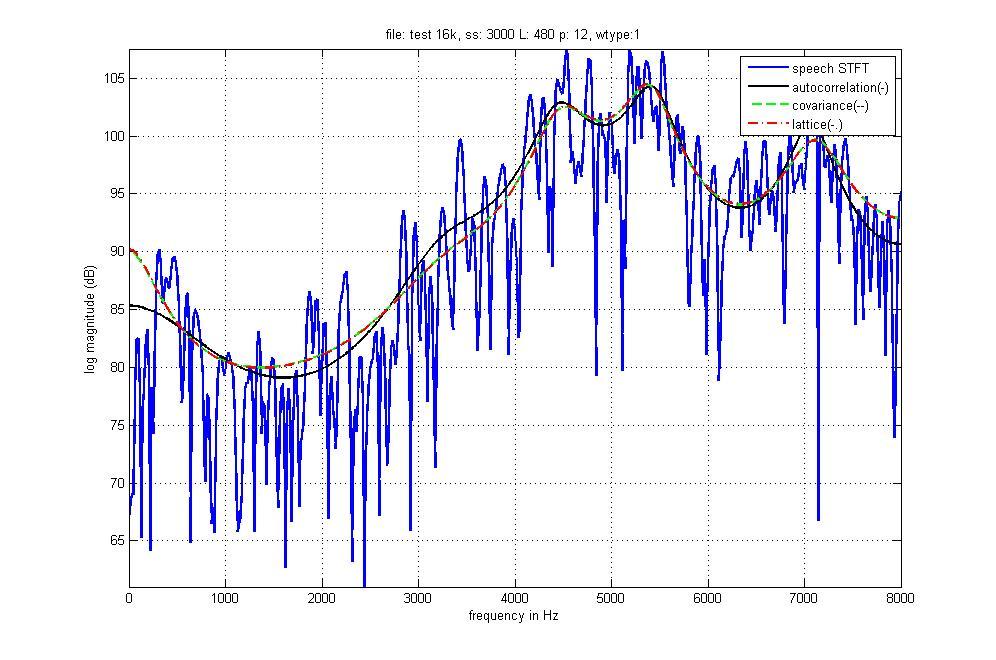
5 Solution The energy of the linear prediction residual using a third order predictor is: E n (3) = E n (0) (1 k1)(1 2 k2)(1 2 k3) 2 = (2000)(1 0.25)(1 0.25)(1 0.04) = 1080 Problem 5 Write a MATLAB program to convert from a frame of speech to a set of linear prediction coefficients, using all 3 methods discussed in class, i.e., the Autocorrelation Method, the Covariance Method, and the Lattice Filter Method. Choose a section of a steady state vowel, and a section of unvoiced speech, and plot LPC spectra from the 3 methods along with the normal spectrum from the Hamming window weighted frame. Use N = 300, p = 12, with Hamming Window weighting for the autocorrelation method. Use the same parameters for the Covariance and Lattice Methods. Use the files ah.wav to get a vowel steady state sound beginning at sample 3000, and the file test 16k.wav to get a fricative beginning at sample (Dont forget that for the covariance and lattice methods, you also need to preserve p samples before the starting sample at n = 3000 for computing correlations, and error signals). Solution The following MATLAB program reads in a file of speech and computes the original spectrum (of the signal weighted by a Hamming window), and plots on top of this the LPC spectrum from the autocorrelation, covariance, and lattice methods. There is a main program and 3 functions (durbin for the autocorrelation method, cholesky for the covariance methodalthough simple matrix inversion was used, rather than the Cholesky decomposition, and lattice for the traditional lattice method). read in speech file, choose section of speech and solve for set of lpc coefficients using the autocorrelation method, the covariance method, and the lattice method plot the resulting spectra from all three methods read in waveform for a speech file [xin,fs,mode,format]=loadwav( ah_truncated.wav );xin) filename=input( enter speech filename:, s ); [xin,fs,mode,format]=loadwav(filename); 5
6 normalize input to [-1,1] range and play out sound file xinn=xin/max(xin); sound(xinn,fs); [nrows ncol]=size(xin); m=input( starting sample for speech frame: ); N=input( frame duration: ); p=input( lpc order: ); wtype=input(window type(1=hamming, 0=Rectangular):); stitle=sprintf( file: s, ss: d N: d p: d,filename,m,n,p); print out number of samples in file, read in plotting parameters fprintf( number of samples in file: 7.0f \n, nrows); autocorrelation method--choose section of speech, window using Hamming window, compute autocorrelation for i=0,1,...,p get original spectrum xino=[(xin(m:m+n-1).*hamming(n)) zeros(1,512-n)]; h0=fft(xino,512); f=0:fs/512:fs-fs/512; plot(f(1:257),20*log10(abs(h0(1:257)))),title(stitle),ylabel( log magnitude (db) ),... xlabel( frequency in Hz ); hold on; autocorrelation method xf=xin(m:m+n-1); [R,E,k,alpha,G]=durbin(xf,N,p,wtype); alphap=alpha(1:p,p); num=[1 -alphap ]; [ha,f]=freqz(g,num,512,fs); plot(f,20*log10(abs(ha)), k- ); fvtool(g,num); covariance method--choose section of speech, compute correlation matrix and covariance vector xc=xin(m-p:m+n-1); [phim,phiv,ec,alphac,gc]=cholesky(xc,n,p); numc=[1 -alphac ]; [hc,f]=freqz(gc,numc,512,fs); plot(f,20*log10(abs(hc)), g-- ); fvtool(gc,numc); lattice method--choose section of speech, compute forward and backward errors xl=xin(m-p:m+n-1); [EL,alphal,GL,k]=lattice(xl,N,p); alphalat=alphal(:,p); numl=[1 -alphalat ]; 6
7 [hl,f]=freqz(gl,numl,512,fs); plot(f,20*log10(abs(hl)), r-. ); leg( windowed speech, autocorrelation method(-), covariance method(--), lattice me fvtool(gl,numl); function [R,E,k,alpha,G]=durbin(xf,N,p,wtype) function [R,E,k,alpha,G]=durbin(xf,N,p,wtype) compute window based on wtype; wtype=1 for Hamming window, wtype=0 for Rectangular window compute R(0:p) from windowed xf solve Durbin recursion fo E,k,alpha in 8 easy steps step 1--E(0)=R(0) step 2--k(1)=R(1)/E(0) step 3--alpha(1,1)=k(1) step 4--E(1)=(1-k(1).^2)E(0) steps 5-8--for i=2,3,...,p; step 5--k(i)=[R(i)-sum from j=1 to i-1 alpha(j,i-1).*r(i-j)]/e(i-1) step 6--alpha(i,i)=k(i) step 7--for j=1,2,...,i-1 alpha(j,i)=alpha(j,i-1)-k(i)alpha(i-j,i-1) step 8--E(i)=(1-k(i).^2)E(i-1) if wtype==1 win=hamming(n); else win=boxcar(n); window frame for autocorrelation method xf=xf.*win; compute autocorrelation for k=0:p R(k+1)=sum(xf(1:N-k).*xf(k+1:N)); solve for lpc coefficients using Durbin s method E=zeros(1,p); k=zeros(1,p); alpha=zeros(p,p); E(1)=R(1); ind=1; k(ind)=r(ind+1)/e(ind); 7
8 alpha(ind,ind)=k(ind); E(ind+1)=(1-k(ind).^2)*E(ind); for ind=2:p k(ind)=(r(ind+1)-sum(alpha(1:ind-1,ind-1).*r(ind:-1:2)))/e(ind); alpha(ind,ind)=k(ind); for jnd=1:ind-1 alpha(jnd,ind)=alpha(jnd,ind-1)-k(ind)*alpha(ind-jnd,ind-1); E(ind+1)=(1-k(ind).^2)*E(ind); G=sqrt(E(p+1)); function [phim,phiv,ec,alphac,gc]=cholesky(xc,n,p) cholesky decomposition first compute phim(1,1)...phim(p,p) next compute phiv(1,0)...phiv(p,0) for i=1:p for k=1:p phim(i,k)=sum(xc(p+1-i:p+n-i).*xc(p+1-k:p+n-k)); for i=1:p phiv(i)=sum(xc(p+1-i:p+n-i).*xc(p+1:p+n)); phiz(i)=sum(xc(p+1:p+n).*xc(p+1-i:p+n-i)); phi0=sum(xc(p+1:p+n).^2); use simple matrix inverse to solve equations--come back to Cholesky decomposition later phiv=phiv ; solve using matrix inverse, phim*alphac=phiv alphac=inv(phim)*phiv alphac=inv(phim)*phiv; EC=phi0-sum(alphac.*phiz); GC=sqrt(EC); function [EL,alphal,GL,k]=lattice(xc,N,p) lattice solution to lpc equations follow 10 step solution step 1--set e(0)(m)=b(0)(m)=s(m) step 2--compute k1=alpha(1,1) from basic lattice reflection coefficient equation 8.89 step 3--determine forward and backward errors e(1)(m) and b(1)(m) from 8
9 eqns 8.84 and 8.87 step 4--set i=2 step 5--determine ki=alpha(i,i) from eqn 8.89 step 6--determine alpha(j,i) for j-1,2,...,i-1 from eqn 8.70 step 7--determine e(i)(m) and b(i)(m) from eqns and 8.87 step 8--set i=i+1 step 9--if i<=p, go to step 5 step 10--finished e(:,1)=xc; b(:,1)=xc; k(1)=sum(e(p+1:p+n,1).*b(p:p+n-1,1))/sqrt((sum(e(p+1:p+n,1).^2)*sum(b(p:p+n-1,1).^2))); alphal(1,1)=k(1); btemp=[0 b(:,1) ] ; e(1:n+p,2)=e(1:n+p,1)-k(1)*btemp(1:n+p); b(1:n+p,2)=btemp(1:n+p)-k(1)*e(1:n+p,1); for i=2:p k(i)=sum(e(p+1:p+n,i).*b(p:p+n-1,i))/sqrt((sum(e(p+1:p+n,i).^2)*sum(b(p:p+n-1,i).^2) alphal(i,i)=k(i); for j=1:i-1 alphal(j,i)=alphal(j,i-1)-k(i)*alphal(i-j,i-1); btemp=[0 b(:,i) ] ; e(1:n+p,i+1)=e(1:n+p,i)-k(i)*btemp(1:n+p); b(1:n+p,i+1)=btemp(1:n+p)-k(i)*e(1:n+p,i); EL=sum(xc(p+1:p+N).^2); for i=1:p EL=EL*(1-k(i).^2); GL=sqrt(EL); The following plots are for a vowel from the file ah.wav, and a fricative from the file test 16k.wav. 9
10 10
Chapter 9. Linear Predictive Analysis of Speech Signals 语音信号的线性预测分析
 Chapter 9 Linear Predictive Analysis of Speech Signals 语音信号的线性预测分析 1 LPC Methods LPC methods are the most widely used in speech coding, speech synthesis, speech recognition, speaker recognition and verification
Chapter 9 Linear Predictive Analysis of Speech Signals 语音信号的线性预测分析 1 LPC Methods LPC methods are the most widely used in speech coding, speech synthesis, speech recognition, speaker recognition and verification
SPEECH ANALYSIS AND SYNTHESIS
 16 Chapter 2 SPEECH ANALYSIS AND SYNTHESIS 2.1 INTRODUCTION: Speech signal analysis is used to characterize the spectral information of an input speech signal. Speech signal analysis [52-53] techniques
16 Chapter 2 SPEECH ANALYSIS AND SYNTHESIS 2.1 INTRODUCTION: Speech signal analysis is used to characterize the spectral information of an input speech signal. Speech signal analysis [52-53] techniques
Department of Electrical and Computer Engineering Digital Speech Processing Homework No. 6 Solutions
 Problem 1 Department of Electrical and Computer Engineering Digital Speech Processing Homework No. 6 Solutions The complex cepstrum, ˆx[n], of a sequence x[n] is the inverse Fourier transform of the complex
Problem 1 Department of Electrical and Computer Engineering Digital Speech Processing Homework No. 6 Solutions The complex cepstrum, ˆx[n], of a sequence x[n] is the inverse Fourier transform of the complex
Lab 9a. Linear Predictive Coding for Speech Processing
 EE275Lab October 27, 2007 Lab 9a. Linear Predictive Coding for Speech Processing Pitch Period Impulse Train Generator Voiced/Unvoiced Speech Switch Vocal Tract Parameters Time-Varying Digital Filter H(z)
EE275Lab October 27, 2007 Lab 9a. Linear Predictive Coding for Speech Processing Pitch Period Impulse Train Generator Voiced/Unvoiced Speech Switch Vocal Tract Parameters Time-Varying Digital Filter H(z)
ADSP ADSP ADSP ADSP. Advanced Digital Signal Processing (18-792) Spring Fall Semester, Department of Electrical and Computer Engineering
 Spring Fall Semester, Department of Electrical and Computer Engineering") Advanced Digital Signal rocessing (18-792) Spring Fall Semester, 201 2012 Department of Electrical and Computer Engineering ROBLEM SET 8 Issued: 10/26/18 Due: 11/2/18 Note: This problem set is due Friday,
Advanced Digital Signal rocessing (18-792) Spring Fall Semester, 201 2012 Department of Electrical and Computer Engineering ROBLEM SET 8 Issued: 10/26/18 Due: 11/2/18 Note: This problem set is due Friday,
L7: Linear prediction of speech
 L7: Linear prediction of speech Introduction Linear prediction Finding the linear prediction coefficients Alternative representations This lecture is based on [Dutoit and Marques, 2009, ch1; Taylor, 2009,
L7: Linear prediction of speech Introduction Linear prediction Finding the linear prediction coefficients Alternative representations This lecture is based on [Dutoit and Marques, 2009, ch1; Taylor, 2009,
M. Hasegawa-Johnson. DRAFT COPY.
 Lecture Notes in Speech Production, Speech Coding, and Speech Recognition Mark Hasegawa-Johnson University of Illinois at Urbana-Champaign February 7, 000 M. Hasegawa-Johnson. DRAFT COPY. Chapter Linear
Lecture Notes in Speech Production, Speech Coding, and Speech Recognition Mark Hasegawa-Johnson University of Illinois at Urbana-Champaign February 7, 000 M. Hasegawa-Johnson. DRAFT COPY. Chapter Linear
Lesson 1. Optimal signalbehandling LTH. September Statistical Digital Signal Processing and Modeling, Hayes, M:
 Lesson 1 Optimal Signal Processing Optimal signalbehandling LTH September 2013 Statistical Digital Signal Processing and Modeling, Hayes, M: John Wiley & Sons, 1996. ISBN 0471594318 Nedelko Grbic Mtrl
Lesson 1 Optimal Signal Processing Optimal signalbehandling LTH September 2013 Statistical Digital Signal Processing and Modeling, Hayes, M: John Wiley & Sons, 1996. ISBN 0471594318 Nedelko Grbic Mtrl
Linear Prediction Coding. Nimrod Peleg Update: Aug. 2007
 Linear Prediction Coding Nimrod Peleg Update: Aug. 2007 1 Linear Prediction and Speech Coding The earliest papers on applying LPC to speech: Atal 1968, 1970, 1971 Markel 1971, 1972 Makhoul 1975 This is
Linear Prediction Coding Nimrod Peleg Update: Aug. 2007 1 Linear Prediction and Speech Coding The earliest papers on applying LPC to speech: Atal 1968, 1970, 1971 Markel 1971, 1972 Makhoul 1975 This is
Signal representations: Cepstrum
 Signal representations: Cepstrum Source-filter separation for sound production For speech, source corresponds to excitation by a pulse train for voiced phonemes and to turbulence (noise) for unvoiced phonemes,
Signal representations: Cepstrum Source-filter separation for sound production For speech, source corresponds to excitation by a pulse train for voiced phonemes and to turbulence (noise) for unvoiced phonemes,
Lecture 19 IIR Filters
 Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Feature extraction 2
 Centre for Vision Speech & Signal Processing University of Surrey, Guildford GU2 7XH. Feature extraction 2 Dr Philip Jackson Linear prediction Perceptual linear prediction Comparison of feature methods
Centre for Vision Speech & Signal Processing University of Surrey, Guildford GU2 7XH. Feature extraction 2 Dr Philip Jackson Linear prediction Perceptual linear prediction Comparison of feature methods
Voiced Speech. Unvoiced Speech
 Digital Speech Processing Lecture 2 Homomorphic Speech Processing General Discrete-Time Model of Speech Production p [ n] = p[ n] h [ n] Voiced Speech L h [ n] = A g[ n] v[ n] r[ n] V V V p [ n ] = u [
Digital Speech Processing Lecture 2 Homomorphic Speech Processing General Discrete-Time Model of Speech Production p [ n] = p[ n] h [ n] Voiced Speech L h [ n] = A g[ n] v[ n] r[ n] V V V p [ n ] = u [
Damped Oscillators (revisited)
") Damped Oscillators (revisited) We saw that damped oscillators can be modeled using a recursive filter with two coefficients and no feedforward components: Y(k) = - a(1)*y(k-1) - a(2)*y(k-2) We derived
Damped Oscillators (revisited) We saw that damped oscillators can be modeled using a recursive filter with two coefficients and no feedforward components: Y(k) = - a(1)*y(k-1) - a(2)*y(k-2) We derived
GATE EE Topic wise Questions SIGNALS & SYSTEMS
 www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
representation of speech
 Digital Speech Processing Lectures 7-8 Time Domain Methods in Speech Processing 1 General Synthesis Model voiced sound amplitude Log Areas, Reflection Coefficients, Formants, Vocal Tract Polynomial, l
Digital Speech Processing Lectures 7-8 Time Domain Methods in Speech Processing 1 General Synthesis Model voiced sound amplitude Log Areas, Reflection Coefficients, Formants, Vocal Tract Polynomial, l
Statistical and Adaptive Signal Processing
 r Statistical and Adaptive Signal Processing Spectral Estimation, Signal Modeling, Adaptive Filtering and Array Processing Dimitris G. Manolakis Massachusetts Institute of Technology Lincoln Laboratory
r Statistical and Adaptive Signal Processing Spectral Estimation, Signal Modeling, Adaptive Filtering and Array Processing Dimitris G. Manolakis Massachusetts Institute of Technology Lincoln Laboratory
Formant Analysis using LPC
 Linguistics 582 Basics of Digital Signal Processing Formant Analysis using LPC LPC (linear predictive coefficients) analysis is a technique for estimating the vocal tract transfer function, from which
Linguistics 582 Basics of Digital Signal Processing Formant Analysis using LPC LPC (linear predictive coefficients) analysis is a technique for estimating the vocal tract transfer function, from which
Linear Prediction 1 / 41
 Linear Prediction 1 / 41 A map of speech signal processing Natural signals Models Artificial signals Inference Speech synthesis Hidden Markov Inference Homomorphic processing Dereverberation, Deconvolution
Linear Prediction 1 / 41 A map of speech signal processing Natural signals Models Artificial signals Inference Speech synthesis Hidden Markov Inference Homomorphic processing Dereverberation, Deconvolution
Applications of Linear Prediction
 SGN-4006 Audio and Speech Processing Applications of Linear Prediction Slides for this lecture are based on those created by Katariina Mahkonen for TUT course Puheenkäsittelyn menetelmät in Spring 03.
SGN-4006 Audio and Speech Processing Applications of Linear Prediction Slides for this lecture are based on those created by Katariina Mahkonen for TUT course Puheenkäsittelyn menetelmät in Spring 03.
Source/Filter Model. Markus Flohberger. Acoustic Tube Models Linear Prediction Formant Synthesizer.
 Source/Filter Model Acoustic Tube Models Linear Prediction Formant Synthesizer Markus Flohberger maxiko@sbox.tugraz.at Graz, 19.11.2003 2 ACOUSTIC TUBE MODELS 1 Introduction Speech synthesis methods that
Source/Filter Model Acoustic Tube Models Linear Prediction Formant Synthesizer Markus Flohberger maxiko@sbox.tugraz.at Graz, 19.11.2003 2 ACOUSTIC TUBE MODELS 1 Introduction Speech synthesis methods that
CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME
 CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME Shri Mata Vaishno Devi University, (SMVDU), 2013 Page 13 CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME When characterizing or modeling a random variable, estimates
CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME Shri Mata Vaishno Devi University, (SMVDU), 2013 Page 13 CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME When characterizing or modeling a random variable, estimates
ECE 438 Exam 2 Solutions, 11/08/2006.
 NAME: ECE 438 Exam Solutions, /08/006. This is a closed-book exam, but you are allowed one standard (8.5-by-) sheet of notes. No calculators are allowed. Total number of points: 50. This exam counts for
NAME: ECE 438 Exam Solutions, /08/006. This is a closed-book exam, but you are allowed one standard (8.5-by-) sheet of notes. No calculators are allowed. Total number of points: 50. This exam counts for
Time-domain representations
 Time-domain representations Speech Processing Tom Bäckström Aalto University Fall 2016 Basics of Signal Processing in the Time-domain Time-domain signals Before we can describe speech signals or modelling
Time-domain representations Speech Processing Tom Bäckström Aalto University Fall 2016 Basics of Signal Processing in the Time-domain Time-domain signals Before we can describe speech signals or modelling
Thursday, October 29, LPC Analysis
 LPC Analysis Prediction & Regression We hypothesize that there is some systematic relation between the values of two variables, X and Y. If this hypothesis is true, we can (partially) predict the observed
LPC Analysis Prediction & Regression We hypothesize that there is some systematic relation between the values of two variables, X and Y. If this hypothesis is true, we can (partially) predict the observed
Speech Signal Representations
 Speech Signal Representations Berlin Chen 2003 References: 1. X. Huang et. al., Spoken Language Processing, Chapters 5, 6 2. J. R. Deller et. al., Discrete-Time Processing of Speech Signals, Chapters 4-6
Speech Signal Representations Berlin Chen 2003 References: 1. X. Huang et. al., Spoken Language Processing, Chapters 5, 6 2. J. R. Deller et. al., Discrete-Time Processing of Speech Signals, Chapters 4-6
Chapter 2 Speech Production Model
 Chapter 2 Speech Production Model Abstract The continuous speech signal (air) that comes out of the mouth and the nose is converted into the electrical signal using the microphone. The electrical speech
Chapter 2 Speech Production Model Abstract The continuous speech signal (air) that comes out of the mouth and the nose is converted into the electrical signal using the microphone. The electrical speech
A Spectral-Flatness Measure for Studying the Autocorrelation Method of Linear Prediction of Speech Analysis
 A Spectral-Flatness Measure for Studying the Autocorrelation Method of Linear Prediction of Speech Analysis Authors: Augustine H. Gray and John D. Markel By Kaviraj, Komaljit, Vaibhav Spectral Flatness
A Spectral-Flatness Measure for Studying the Autocorrelation Method of Linear Prediction of Speech Analysis Authors: Augustine H. Gray and John D. Markel By Kaviraj, Komaljit, Vaibhav Spectral Flatness
The Z-Transform. For a phasor: X(k) = e jωk. We have previously derived: Y = H(z)X
 = e jωk. We have previously derived: Y = H(z)X") The Z-Transform For a phasor: X(k) = e jωk We have previously derived: Y = H(z)X That is, the output of the filter (Y(k)) is derived by multiplying the input signal (X(k)) by the transfer function (H(z)).
The Z-Transform For a phasor: X(k) = e jωk We have previously derived: Y = H(z)X That is, the output of the filter (Y(k)) is derived by multiplying the input signal (X(k)) by the transfer function (H(z)).
David Weenink. First semester 2007
 Institute of Phonetic Sciences University of Amsterdam First semester 2007 Digital s What is a digital filter? An algorithm that calculates with sample values Formant /machine H 1 (z) that: Given input
Institute of Phonetic Sciences University of Amsterdam First semester 2007 Digital s What is a digital filter? An algorithm that calculates with sample values Formant /machine H 1 (z) that: Given input
E : Lecture 1 Introduction
 E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
DISCRETE-TIME SIGNAL PROCESSING
 THIRD EDITION DISCRETE-TIME SIGNAL PROCESSING ALAN V. OPPENHEIM MASSACHUSETTS INSTITUTE OF TECHNOLOGY RONALD W. SCHÄFER HEWLETT-PACKARD LABORATORIES Upper Saddle River Boston Columbus San Francisco New
THIRD EDITION DISCRETE-TIME SIGNAL PROCESSING ALAN V. OPPENHEIM MASSACHUSETTS INSTITUTE OF TECHNOLOGY RONALD W. SCHÄFER HEWLETT-PACKARD LABORATORIES Upper Saddle River Boston Columbus San Francisco New
CS578- Speech Signal Processing
 CS578- Speech Signal Processing Lecture 7: Speech Coding Yannis Stylianou University of Crete, Computer Science Dept., Multimedia Informatics Lab yannis@csd.uoc.gr Univ. of Crete Outline 1 Introduction
CS578- Speech Signal Processing Lecture 7: Speech Coding Yannis Stylianou University of Crete, Computer Science Dept., Multimedia Informatics Lab yannis@csd.uoc.gr Univ. of Crete Outline 1 Introduction
( ) John A. Quinn Lecture. ESE 531: Digital Signal Processing. Lecture Outline. Frequency Response of LTI System. Example: Zero on Real Axis
 John A. Quinn Lecture. ESE 531: Digital Signal Processing. Lecture Outline. Frequency Response of LTI System. Example: Zero on Real Axis") John A. Quinn Lecture ESE 531: Digital Signal Processing Lec 15: March 21, 2017 Review, Generalized Linear Phase Systems Penn ESE 531 Spring 2017 Khanna Lecture Outline!!! 2 Frequency Response of LTI System
John A. Quinn Lecture ESE 531: Digital Signal Processing Lec 15: March 21, 2017 Review, Generalized Linear Phase Systems Penn ESE 531 Spring 2017 Khanna Lecture Outline!!! 2 Frequency Response of LTI System
Multimedia Communications. Differential Coding
 Multimedia Communications Differential Coding Differential Coding In many sources, the source output does not change a great deal from one sample to the next. This means that both the dynamic range and
Multimedia Communications Differential Coding Differential Coding In many sources, the source output does not change a great deal from one sample to the next. This means that both the dynamic range and
Chapter 3 HW Solution
 ME 48/58 Chapter 3 HW February 6, Chapter 3 HW Solution Problem. Here you re given a lead network often used in control systems to improve the transient response which adds around 6 of phase angle at about
ME 48/58 Chapter 3 HW February 6, Chapter 3 HW Solution Problem. Here you re given a lead network often used in control systems to improve the transient response which adds around 6 of phase angle at about
Analysis of Finite Wordlength Effects
 Analysis of Finite Wordlength Effects Ideally, the system parameters along with the signal variables have infinite precision taing any value between and In practice, they can tae only discrete values within
Analysis of Finite Wordlength Effects Ideally, the system parameters along with the signal variables have infinite precision taing any value between and In practice, they can tae only discrete values within
Recursive, Infinite Impulse Response (IIR) Digital Filters:
 Digital Filters:") Recursive, Infinite Impulse Response (IIR) Digital Filters: Filters defined by Laplace Domain transfer functions (analog devices) can be easily converted to Z domain transfer functions (digital, sampled
Recursive, Infinite Impulse Response (IIR) Digital Filters: Filters defined by Laplace Domain transfer functions (analog devices) can be easily converted to Z domain transfer functions (digital, sampled
4.2 Acoustics of Speech Production
 4.2 Acoustics of Speech Production Acoustic phonetics is a field that studies the acoustic properties of speech and how these are related to the human speech production system. The topic is vast, exceeding
4.2 Acoustics of Speech Production Acoustic phonetics is a field that studies the acoustic properties of speech and how these are related to the human speech production system. The topic is vast, exceeding
Let H(z) = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )
 = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )") Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
THE PROBLEMS OF ROBUST LPC PARAMETRIZATION FOR. Petr Pollak & Pavel Sovka. Czech Technical University of Prague
 THE PROBLEMS OF ROBUST LPC PARAMETRIZATION FOR SPEECH CODING Petr Polla & Pavel Sova Czech Technical University of Prague CVUT FEL K, 66 7 Praha 6, Czech Republic E-mail: polla@noel.feld.cvut.cz Abstract
THE PROBLEMS OF ROBUST LPC PARAMETRIZATION FOR SPEECH CODING Petr Polla & Pavel Sova Czech Technical University of Prague CVUT FEL K, 66 7 Praha 6, Czech Republic E-mail: polla@noel.feld.cvut.cz Abstract
Chapter 10 Applications in Communications
 Chapter 10 Applications in Communications School of Information Science and Engineering, SDU. 1/ 47 Introduction Some methods for digitizing analog waveforms: Pulse-code modulation (PCM) Differential PCM
Chapter 10 Applications in Communications School of Information Science and Engineering, SDU. 1/ 47 Introduction Some methods for digitizing analog waveforms: Pulse-code modulation (PCM) Differential PCM
Pitch Prediction Filters in Speech Coding
 IEEE TRANSACTIONS ON ACOUSTICS. SPEECH, AND SIGNAL PROCESSING. VOL. 37, NO. 4, APRIL 1989 Pitch Prediction Filters in Speech Coding RAVI P. RAMACHANDRAN AND PETER KABAL Abstract-Prediction error filters
IEEE TRANSACTIONS ON ACOUSTICS. SPEECH, AND SIGNAL PROCESSING. VOL. 37, NO. 4, APRIL 1989 Pitch Prediction Filters in Speech Coding RAVI P. RAMACHANDRAN AND PETER KABAL Abstract-Prediction error filters
EE482: Digital Signal Processing Applications
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 02 DSP Fundamentals 14/01/21 http://www.ee.unlv.edu/~b1morris/ee482/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 02 DSP Fundamentals 14/01/21 http://www.ee.unlv.edu/~b1morris/ee482/
Z Transform (Part - II)
") Z Transform (Part - II). The Z Transform of the following real exponential sequence x(nt) = a n, nt 0 = 0, nt < 0, a > 0 (a) ; z > (c) for all z z (b) ; z (d) ; z < a > a az az Soln. The given sequence
Z Transform (Part - II). The Z Transform of the following real exponential sequence x(nt) = a n, nt 0 = 0, nt < 0, a > 0 (a) ; z > (c) for all z z (b) ; z (d) ; z < a > a az az Soln. The given sequence
Discrete Time Systems
 Discrete Time Systems Valentina Hubeika, Jan Černocký DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz 1 LTI systems In this course, we work only with linear and time-invariant systems. We talked about
Discrete Time Systems Valentina Hubeika, Jan Černocký DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz 1 LTI systems In this course, we work only with linear and time-invariant systems. We talked about
LPC methods are the most widely used in. recognition, speaker recognition and verification
 Digital Seech Processing Lecture 3 Linear Predictive Coding (LPC)- Introduction LPC Methods LPC methods are the most widely used in seech coding, seech synthesis, seech recognition, seaker recognition
Digital Seech Processing Lecture 3 Linear Predictive Coding (LPC)- Introduction LPC Methods LPC methods are the most widely used in seech coding, seech synthesis, seech recognition, seaker recognition
LAB 6: FIR Filter Design Summer 2011
 University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 6: FIR Filter Design Summer 011
University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 6: FIR Filter Design Summer 011
Chapter 5 THE APPLICATION OF THE Z TRANSFORM. 5.3 Stability
 Chapter 5 THE APPLICATION OF THE Z TRANSFORM 5.3 Stability Copyright c 2005- Andreas Antoniou Victoria, BC, Canada Email: aantoniou@ieee.org February 13, 2008 Frame # 1 Slide # 1 A. Antoniou Digital Signal
Chapter 5 THE APPLICATION OF THE Z TRANSFORM 5.3 Stability Copyright c 2005- Andreas Antoniou Victoria, BC, Canada Email: aantoniou@ieee.org February 13, 2008 Frame # 1 Slide # 1 A. Antoniou Digital Signal
Adaptive Systems Homework Assignment 1
 Signal Processing and Speech Communication Lab. Graz University of Technology Adaptive Systems Homework Assignment 1 Name(s) Matr.No(s). The analytical part of your homework (your calculation sheets) as
Signal Processing and Speech Communication Lab. Graz University of Technology Adaptive Systems Homework Assignment 1 Name(s) Matr.No(s). The analytical part of your homework (your calculation sheets) as
LPC and Vector Quantization
 LPC and Vector Quantization JanČernocký,ValentinaHubeikaFITBUTBrno When modeling speech production based on LPC, we assume that the excitation is passed through the linear filter: H(z) = A(z) G,where A(z)isaP-thorderpolynome:
LPC and Vector Quantization JanČernocký,ValentinaHubeikaFITBUTBrno When modeling speech production based on LPC, we assume that the excitation is passed through the linear filter: H(z) = A(z) G,where A(z)isaP-thorderpolynome:
VALLIAMMAI ENGINEERING COLLEGE. SRM Nagar, Kattankulathur DEPARTMENT OF INFORMATION TECHNOLOGY. Academic Year
 VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur- 603 203 DEPARTMENT OF INFORMATION TECHNOLOGY Academic Year 2016-2017 QUESTION BANK-ODD SEMESTER NAME OF THE SUBJECT SUBJECT CODE SEMESTER YEAR
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur- 603 203 DEPARTMENT OF INFORMATION TECHNOLOGY Academic Year 2016-2017 QUESTION BANK-ODD SEMESTER NAME OF THE SUBJECT SUBJECT CODE SEMESTER YEAR
(i) Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform
 Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform") z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
5 Kalman filters. 5.1 Scalar Kalman filter. Unit delay Signal model. System model
 5 Kalman filters 5.1 Scalar Kalman filter 5.1.1 Signal model System model {Y (n)} is an unobservable sequence which is described by the following state or system equation: Y (n) = h(n)y (n 1) + Z(n), n
5 Kalman filters 5.1 Scalar Kalman filter 5.1.1 Signal model System model {Y (n)} is an unobservable sequence which is described by the following state or system equation: Y (n) = h(n)y (n 1) + Z(n), n
ECE4270 Fundamentals of DSP Lecture 20. Fixed-Point Arithmetic in FIR and IIR Filters (part I) Overview of Lecture. Overflow. FIR Digital Filter
 Overview of Lecture. Overflow. FIR Digital Filter") ECE4270 Fundamentals of DSP Lecture 20 Fixed-Point Arithmetic in FIR and IIR Filters (part I) School of ECE Center for Signal and Information Processing Georgia Institute of Technology Overview of Lecture
ECE4270 Fundamentals of DSP Lecture 20 Fixed-Point Arithmetic in FIR and IIR Filters (part I) School of ECE Center for Signal and Information Processing Georgia Institute of Technology Overview of Lecture
On reducing the coding-delay and computational complexity in an innovations-assisted linear predictive speech coder
 Retrospective Theses and Dissertations Iowa State University Capstones, Theses and Dissertations 1-1-1992 On reducing the coding-delay and computational complexity in an innovations-assisted linear predictive
Retrospective Theses and Dissertations Iowa State University Capstones, Theses and Dissertations 1-1-1992 On reducing the coding-delay and computational complexity in an innovations-assisted linear predictive
Class of waveform coders can be represented in this manner
 Digital Speech Processing Lecture 15 Speech Coding Methods Based on Speech Waveform Representations ti and Speech Models Uniform and Non- Uniform Coding Methods 1 Analog-to-Digital Conversion (Sampling
Digital Speech Processing Lecture 15 Speech Coding Methods Based on Speech Waveform Representations ti and Speech Models Uniform and Non- Uniform Coding Methods 1 Analog-to-Digital Conversion (Sampling
ENTROPY RATE-BASED STATIONARY / NON-STATIONARY SEGMENTATION OF SPEECH
 ENTROPY RATE-BASED STATIONARY / NON-STATIONARY SEGMENTATION OF SPEECH Wolfgang Wokurek Institute of Natural Language Processing, University of Stuttgart, Germany wokurek@ims.uni-stuttgart.de, http://www.ims-stuttgart.de/~wokurek
ENTROPY RATE-BASED STATIONARY / NON-STATIONARY SEGMENTATION OF SPEECH Wolfgang Wokurek Institute of Natural Language Processing, University of Stuttgart, Germany wokurek@ims.uni-stuttgart.de, http://www.ims-stuttgart.de/~wokurek
Parametric Method Based PSD Estimation using Gaussian Window
 International Journal of Engineering Trends and Technology (IJETT) Volume 29 Number 1 - November 215 Parametric Method Based PSD Estimation using Gaussian Window Pragati Sheel 1, Dr. Rajesh Mehra 2, Preeti
International Journal of Engineering Trends and Technology (IJETT) Volume 29 Number 1 - November 215 Parametric Method Based PSD Estimation using Gaussian Window Pragati Sheel 1, Dr. Rajesh Mehra 2, Preeti
IT DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A
 UNIT-1 SIGNALS AND SYSTEMS PART-A") DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING IT6502 - DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A 1. What is a continuous and discrete time signal? Continuous
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING IT6502 - DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A 1. What is a continuous and discrete time signal? Continuous
Ill-Conditioning and Bandwidth Expansion in Linear Prediction of Speech
 Ill-Conditioning and Bandwidth Expansion in Linear Prediction of Speech Peter Kabal Department of Electrical & Computer Engineering McGill University Montreal, Canada February 2003 c 2003 Peter Kabal 2003/02/25
Ill-Conditioning and Bandwidth Expansion in Linear Prediction of Speech Peter Kabal Department of Electrical & Computer Engineering McGill University Montreal, Canada February 2003 c 2003 Peter Kabal 2003/02/25
Z - Transform. It offers the techniques for digital filter design and frequency analysis of digital signals.
 Z - Transform The z-transform is a very important tool in describing and analyzing digital systems. It offers the techniques for digital filter design and frequency analysis of digital signals. Definition
Z - Transform The z-transform is a very important tool in describing and analyzing digital systems. It offers the techniques for digital filter design and frequency analysis of digital signals. Definition
Sinusoidal Modeling. Yannis Stylianou SPCC University of Crete, Computer Science Dept., Greece,
 Sinusoidal Modeling Yannis Stylianou University of Crete, Computer Science Dept., Greece, yannis@csd.uoc.gr SPCC 2016 1 Speech Production 2 Modulators 3 Sinusoidal Modeling Sinusoidal Models Voiced Speech
Sinusoidal Modeling Yannis Stylianou University of Crete, Computer Science Dept., Greece, yannis@csd.uoc.gr SPCC 2016 1 Speech Production 2 Modulators 3 Sinusoidal Modeling Sinusoidal Models Voiced Speech
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
2. Typical Discrete-Time Systems All-Pass Systems (5.5) 2.2. Minimum-Phase Systems (5.6) 2.3. Generalized Linear-Phase Systems (5.
 2.2. Minimum-Phase Systems (5.6) 2.3. Generalized Linear-Phase Systems (5.") . Typical Discrete-Time Systems.1. All-Pass Systems (5.5).. Minimum-Phase Systems (5.6).3. Generalized Linear-Phase Systems (5.7) .1. All-Pass Systems An all-pass system is defined as a system which has
. Typical Discrete-Time Systems.1. All-Pass Systems (5.5).. Minimum-Phase Systems (5.6).3. Generalized Linear-Phase Systems (5.7) .1. All-Pass Systems An all-pass system is defined as a system which has
ELEG 5173L Digital Signal Processing Ch. 5 Digital Filters
 Department of Electrical Engineering University of Aransas ELEG 573L Digital Signal Processing Ch. 5 Digital Filters Dr. Jingxian Wu wuj@uar.edu OUTLINE 2 FIR and IIR Filters Filter Structures Analog Filters
Department of Electrical Engineering University of Aransas ELEG 573L Digital Signal Processing Ch. 5 Digital Filters Dr. Jingxian Wu wuj@uar.edu OUTLINE 2 FIR and IIR Filters Filter Structures Analog Filters
Wiener Filtering. EE264: Lecture 12
 EE264: Lecture 2 Wiener Filtering In this lecture we will take a different view of filtering. Previously, we have depended on frequency-domain specifications to make some sort of LP/ BP/ HP/ BS filter,
EE264: Lecture 2 Wiener Filtering In this lecture we will take a different view of filtering. Previously, we have depended on frequency-domain specifications to make some sort of LP/ BP/ HP/ BS filter,
Signals and Systems. Problem Set: The z-transform and DT Fourier Transform
 Signals and Systems Problem Set: The z-transform and DT Fourier Transform Updated: October 9, 7 Problem Set Problem - Transfer functions in MATLAB A discrete-time, causal LTI system is described by the
Signals and Systems Problem Set: The z-transform and DT Fourier Transform Updated: October 9, 7 Problem Set Problem - Transfer functions in MATLAB A discrete-time, causal LTI system is described by the
Keywords: Vocal Tract; Lattice model; Reflection coefficients; Linear Prediction; Levinson algorithm.
 Volume 3, Issue 6, June 213 ISSN: 2277 128X International Journal of Advanced Research in Comuter Science and Software Engineering Research Paer Available online at: www.ijarcsse.com Lattice Filter Model
Volume 3, Issue 6, June 213 ISSN: 2277 128X International Journal of Advanced Research in Comuter Science and Software Engineering Research Paer Available online at: www.ijarcsse.com Lattice Filter Model
DIGITAL SIGNAL PROCESSING. Chapter 3 z-transform
 DIGITAL SIGNAL PROCESSING Chapter 3 z-transform by Dr. Norizam Sulaiman Faculty of Electrical & Electronics Engineering norizam@ump.edu.my OER Digital Signal Processing by Dr. Norizam Sulaiman work is
DIGITAL SIGNAL PROCESSING Chapter 3 z-transform by Dr. Norizam Sulaiman Faculty of Electrical & Electronics Engineering norizam@ump.edu.my OER Digital Signal Processing by Dr. Norizam Sulaiman work is
Optimum Ordering and Pole-Zero Pairing of the Cascade Form IIR. Digital Filter
 Optimum Ordering and Pole-Zero Pairing of the Cascade Form IIR Digital Filter There are many possible cascade realiations of a higher order IIR transfer function obtained by different pole-ero pairings
Optimum Ordering and Pole-Zero Pairing of the Cascade Form IIR Digital Filter There are many possible cascade realiations of a higher order IIR transfer function obtained by different pole-ero pairings
Poles and Zeros in z-plane
 M58 Mixed Signal Processors page of 6 Poles and Zeros in z-plane z-plane Response of discrete-time system (i.e. digital filter at a particular frequency ω is determined by the distance between its poles
M58 Mixed Signal Processors page of 6 Poles and Zeros in z-plane z-plane Response of discrete-time system (i.e. digital filter at a particular frequency ω is determined by the distance between its poles
Digital Signal Processing
 COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
Need for transformation?
 Z-TRANSFORM In today s class Z-transform Unilateral Z-transform Bilateral Z-transform Region of Convergence Inverse Z-transform Power Series method Partial Fraction method Solution of difference equations
Z-TRANSFORM In today s class Z-transform Unilateral Z-transform Bilateral Z-transform Region of Convergence Inverse Z-transform Power Series method Partial Fraction method Solution of difference equations
EE123 Digital Signal Processing. M. Lustig, EECS UC Berkeley
 EE123 Digital Signal Processing Today Last time: DTFT - Ch 2 Today: Continue DTFT Z-Transform Ch. 3 Properties of the DTFT cont. Time-Freq Shifting/modulation: M. Lustig, EE123 UCB M. Lustig, EE123 UCB
EE123 Digital Signal Processing Today Last time: DTFT - Ch 2 Today: Continue DTFT Z-Transform Ch. 3 Properties of the DTFT cont. Time-Freq Shifting/modulation: M. Lustig, EE123 UCB M. Lustig, EE123 UCB
Lecture 2 OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE
 OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE EEE 43 DIGITAL SIGNAL PROCESSING (DSP) 2 DIFFERENCE EQUATIONS AND THE Z- TRANSFORM FALL 22 Yrd. Doç. Dr. Didem Kivanc Tureli didemk@ieee.org didem.kivanc@okan.edu.tr
OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE EEE 43 DIGITAL SIGNAL PROCESSING (DSP) 2 DIFFERENCE EQUATIONS AND THE Z- TRANSFORM FALL 22 Yrd. Doç. Dr. Didem Kivanc Tureli didemk@ieee.org didem.kivanc@okan.edu.tr
CMPT 889: Lecture 5 Filters
 CMPT 889: Lecture 5 Filters Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University October 7, 2009 1 Digital Filters Any medium through which a signal passes may be regarded
CMPT 889: Lecture 5 Filters Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University October 7, 2009 1 Digital Filters Any medium through which a signal passes may be regarded
Digital Filters. Linearity and Time Invariance. Linear Time-Invariant (LTI) Filters: CMPT 889: Lecture 5 Filters
 Filters: CMPT 889: Lecture 5 Filters") Digital Filters CMPT 889: Lecture 5 Filters Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University October 7, 29 Any medium through which a signal passes may be regarded as
Digital Filters CMPT 889: Lecture 5 Filters Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University October 7, 29 Any medium through which a signal passes may be regarded as
We have shown earlier that the 1st-order lowpass transfer function
 Tunable IIR Digital Filters We have described earlier two st-order and two nd-order IIR digital transfer functions with tunable frequency response characteristics We shall show now that these transfer
Tunable IIR Digital Filters We have described earlier two st-order and two nd-order IIR digital transfer functions with tunable frequency response characteristics We shall show now that these transfer
Practical Spectral Estimation
 Digital Signal Processing/F.G. Meyer Lecture 4 Copyright 2015 François G. Meyer. All Rights Reserved. Practical Spectral Estimation 1 Introduction The goal of spectral estimation is to estimate how the
Digital Signal Processing/F.G. Meyer Lecture 4 Copyright 2015 François G. Meyer. All Rights Reserved. Practical Spectral Estimation 1 Introduction The goal of spectral estimation is to estimate how the
6. Methods for Rational Spectra It is assumed that signals have rational spectra m k= m
 6. Methods for Rational Spectra It is assumed that signals have rational spectra m k= m φ(ω) = γ ke jωk n k= n ρ, (23) jωk ke where γ k = γ k and ρ k = ρ k. Any continuous PSD can be approximated arbitrary
6. Methods for Rational Spectra It is assumed that signals have rational spectra m k= m φ(ω) = γ ke jωk n k= n ρ, (23) jωk ke where γ k = γ k and ρ k = ρ k. Any continuous PSD can be approximated arbitrary
Part III Spectrum Estimation
 ECE79-4 Part III Part III Spectrum Estimation 3. Parametric Methods for Spectral Estimation Electrical & Computer Engineering North Carolina State University Acnowledgment: ECE79-4 slides were adapted
ECE79-4 Part III Part III Spectrum Estimation 3. Parametric Methods for Spectral Estimation Electrical & Computer Engineering North Carolina State University Acnowledgment: ECE79-4 slides were adapted
ISOLATED WORD RECOGNITION FOR ENGLISH LANGUAGE USING LPC,VQ AND HMM
 ISOLATED WORD RECOGNITION FOR ENGLISH LANGUAGE USING LPC,VQ AND HMM Mayukh Bhaowal and Kunal Chawla (Students)Indian Institute of Information Technology, Allahabad, India Abstract: Key words: Speech recognition
ISOLATED WORD RECOGNITION FOR ENGLISH LANGUAGE USING LPC,VQ AND HMM Mayukh Bhaowal and Kunal Chawla (Students)Indian Institute of Information Technology, Allahabad, India Abstract: Key words: Speech recognition
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches
 How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
EE 313 Linear Signals & Systems (Fall 2018) Solution Set for Homework #7 on Infinite Impulse Response (IIR) Filters CORRECTED
 Solution Set for Homework #7 on Infinite Impulse Response (IIR) Filters CORRECTED") EE 33 Linear Signals & Systems (Fall 208) Solution Set for Homework #7 on Infinite Impulse Response (IIR) Filters CORRECTED By: Mr. Houshang Salimian and Prof. Brian L. Evans Prolog for the Solution Set.
EE 33 Linear Signals & Systems (Fall 208) Solution Set for Homework #7 on Infinite Impulse Response (IIR) Filters CORRECTED By: Mr. Houshang Salimian and Prof. Brian L. Evans Prolog for the Solution Set.
Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals
 Understanding the relationship between transform and the Fourier transform for discrete-time signals") z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
NEW STEIGLITZ-McBRIDE ADAPTIVE LATTICE NOTCH FILTERS
 NEW STEIGLITZ-McBRIDE ADAPTIVE LATTICE NOTCH FILTERS J.E. COUSSEAU, J.P. SCOPPA and P.D. DOÑATE CONICET- Departamento de Ingeniería Eléctrica y Computadoras Universidad Nacional del Sur Av. Alem 253, 8000
NEW STEIGLITZ-McBRIDE ADAPTIVE LATTICE NOTCH FILTERS J.E. COUSSEAU, J.P. SCOPPA and P.D. DOÑATE CONICET- Departamento de Ingeniería Eléctrica y Computadoras Universidad Nacional del Sur Av. Alem 253, 8000
Ch. 7: Z-transform Reading
 c J. Fessler, June 9, 3, 6:3 (student version) 7. Ch. 7: Z-transform Definition Properties linearity / superposition time shift convolution: y[n] =h[n] x[n] Y (z) =H(z) X(z) Inverse z-transform by coefficient
c J. Fessler, June 9, 3, 6:3 (student version) 7. Ch. 7: Z-transform Definition Properties linearity / superposition time shift convolution: y[n] =h[n] x[n] Y (z) =H(z) X(z) Inverse z-transform by coefficient
3GPP TS V6.1.1 ( )
") Technical Specification 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Speech codec speech processing functions; Adaptive Multi-Rate - Wideband (AMR-WB)
Technical Specification 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Speech codec speech processing functions; Adaptive Multi-Rate - Wideband (AMR-WB)
LECTURE NOTES IN AUDIO ANALYSIS: PITCH ESTIMATION FOR DUMMIES
 LECTURE NOTES IN AUDIO ANALYSIS: PITCH ESTIMATION FOR DUMMIES Abstract March, 3 Mads Græsbøll Christensen Audio Analysis Lab, AD:MT Aalborg University This document contains a brief introduction to pitch
LECTURE NOTES IN AUDIO ANALYSIS: PITCH ESTIMATION FOR DUMMIES Abstract March, 3 Mads Græsbøll Christensen Audio Analysis Lab, AD:MT Aalborg University This document contains a brief introduction to pitch
Solutions: Homework Set # 5
 Signal Processing for Communications EPFL Winter Semester 2007/2008 Prof. Suhas Diggavi Handout # 22, Tuesday, November, 2007 Solutions: Homework Set # 5 Problem (a) Since h [n] = 0, we have (b) We can
Signal Processing for Communications EPFL Winter Semester 2007/2008 Prof. Suhas Diggavi Handout # 22, Tuesday, November, 2007 Solutions: Homework Set # 5 Problem (a) Since h [n] = 0, we have (b) We can
CCNY. BME I5100: Biomedical Signal Processing. Stochastic Processes. Lucas C. Parra Biomedical Engineering Department City College of New York
 BME I5100: Biomedical Signal Processing Stochastic Processes Lucas C. Parra Biomedical Engineering Department CCNY 1 Schedule Week 1: Introduction Linear, stationary, normal - the stuff biology is not
BME I5100: Biomedical Signal Processing Stochastic Processes Lucas C. Parra Biomedical Engineering Department CCNY 1 Schedule Week 1: Introduction Linear, stationary, normal - the stuff biology is not
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture 19: Lattice Filters Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 2008 K. E. Barner (Univ. of Delaware) ELEG
ELEG 305: Digital Signal Processing Lecture 19: Lattice Filters Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 2008 K. E. Barner (Univ. of Delaware) ELEG
Design of a CELP coder and analysis of various quantization techniques
 EECS 65 Project Report Design of a CELP coder and analysis of various quantization techniques Prof. David L. Neuhoff By: Awais M. Kamboh Krispian C. Lawrence Aditya M. Thomas Philip I. Tsai Winter 005
EECS 65 Project Report Design of a CELP coder and analysis of various quantization techniques Prof. David L. Neuhoff By: Awais M. Kamboh Krispian C. Lawrence Aditya M. Thomas Philip I. Tsai Winter 005
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture : Design of Digital IIR Filters (Part I) Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner (Univ.
ELEG 305: Digital Signal Processing Lecture : Design of Digital IIR Filters (Part I) Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner (Univ.
Digital Signal Processing:
 Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
Discrete-time signals and systems
 Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
Signals and Systems. Spring Room 324, Geology Palace, ,
 Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
ELEN E4810: Digital Signal Processing Topic 2: Time domain
 ELEN E4810: Digital Signal Processing Topic 2: Time domain 1. Discrete-time systems 2. Convolution 3. Linear Constant-Coefficient Difference Equations (LCCDEs) 4. Correlation 1 1. Discrete-time systems
ELEN E4810: Digital Signal Processing Topic 2: Time domain 1. Discrete-time systems 2. Convolution 3. Linear Constant-Coefficient Difference Equations (LCCDEs) 4. Correlation 1 1. Discrete-time systems
Lab 4: Quantization, Oversampling, and Noise Shaping
 Lab 4: Quantization, Oversampling, and Noise Shaping Due Friday 04/21/17 Overview: This assignment should be completed with your assigned lab partner(s). Each group must turn in a report composed using
Lab 4: Quantization, Oversampling, and Noise Shaping Due Friday 04/21/17 Overview: This assignment should be completed with your assigned lab partner(s). Each group must turn in a report composed using