Quasiconvexity at edges and corners and the nucleation of austenite in martensite
|
|
|
- Mary Sullivan
- 5 years ago
- Views:
Transcription
1 Quasiconvexity at edges and corners and the nucleation of austenite in martensite Konstantinos Koumatos with John M. Ball and Hanuš Seiner Pattern Formation & Multiscale Phenomena in Materials 27/09/11
2 Experimental observations (Seiner) Specimen: Cu-Al-Ni single crystal rectangular bar of dimension mm in austenite edges approximately along (1, 0, 0), (0, 1, 0), (0, 0, 1), the principal directions of the cubic austenite.
3 Experimental procedure
4 alternative
5 Introduction Our work is also connected to the problem of necessary and sufficient conditions for strong local minimizers of E (y) := ϕ (x, y (x), Dy (x)) dx. Ω A classical problem in the calculus of variations - solved in the scalar case. In the vectorial case and Ω smooth, known necessary conditions are: satisfaction of the Euler-Lagrange equations positivity of the second variation quasiconvexity in the interior (Meyers, 1965) quasiconvexity at the boundary (Ball/Marsden, 1984)
6 Introduction Our work is also connected to the problem of necessary and sufficient conditions for strong local minimizers of E (y) := ϕ (x, y (x), Dy (x)) dx. Ω A classical problem in the calculus of variations - solved in the scalar case. In the vectorial case and Ω smooth, known necessary conditions are: satisfaction of the Euler-Lagrange equations positivity of the second variation quasiconvexity in the interior (Meyers, 1965) quasiconvexity at the boundary (Ball/Marsden, 1984)
7 Grabovsky and Mengesha (2009), provided a remarkable generalization of the Weierstrass theory showing that a strengthened version of the necessary conditions is sufficient.
8 Grabovsky and Mengesha (2009), provided a remarkable generalization of the Weierstrass theory showing that a strengthened version of the necessary conditions is sufficient. In our work, we introduce a simplified model and make use of a notion of quasiconvexity to explain why the nucleation cannot occur in the interior or the faces and edges, as well as show how quasiconvexity is lost at any given corner (allowing for the nucleation of austenite).
9 Grabovsky and Mengesha (2009), provided a remarkable generalization of the Weierstrass theory showing that a strengthened version of the necessary conditions is sufficient. In our work, we introduce a simplified model and make use of a notion of quasiconvexity to explain why the nucleation cannot occur in the interior or the faces and edges, as well as show how quasiconvexity is lost at any given corner (allowing for the nucleation of austenite). The result of Grabovsky and Mengesha, though maybe extendable to domains with edges and corners, works for smooth domains and is not directly applicable to our case.
10 We follow the approach to microstructure based on gradient Young measures (e.g. Ball/James, Kinderlehrer/Pedregal, Bhattacharya). These are families of probability measures ν = (ν x ) x Ω generated by sequences of gradients Dy j (assumed bounded in L ). Then, for all continuous f, f ( Dy j (x) ) νx, f = f (A) dν x (A) in L. M 3 3 In this approach, microstructures are idenified with gradient Young measure minimizers ν of an energy functional I θ (ν) = ν x, ϕ (, θ) dx, Ω = austenite at θ = θ c. Ω The underlying/macroscopic deformation gradient corresponds to the centre of mass of ν ν x = ν x, id = A dν x (A). M 3 3
11 We follow the approach to microstructure based on gradient Young measures (e.g. Ball/James, Kinderlehrer/Pedregal, Bhattacharya). These are families of probability measures ν = (ν x ) x Ω generated by sequences of gradients Dy j (assumed bounded in L ). Then, for all continuous f, f ( Dy j (x) ) νx, f = f (A) dν x (A) in L. M 3 3 In this approach, microstructures are idenified with gradient Young measure minimizers ν of an energy functional I θ (ν) = ν x, ϕ (, θ) dx, Ω = austenite at θ = θ c. Ω The underlying/macroscopic deformation gradient corresponds to the centre of mass of ν ν x = ν x, id = A dν x (A). M 3 3
12 Simplified model Let Ω describe the Cu-Al-Ni bar at austenite (θ = θ c ) and θ > θ c. The free-energy function ϕ : M+ 3 3 R {+ } is assumed lower semicontinuous (no coercivity or growth) s.t. δ, A SO (3) ϕ (A) = 0, A 6 i=1 SO (3) U i where δ > 0 and U i are the orthorhombic variants.
13 Cubic-to-orthorhombic variants α, β, γ > 0 and α γ β 0 0 β 0 0 U 1 = α+γ α γ U 2 = α+γ U 3 = U 5 = α γ 2 α+γ 2 0 α+γ 2 α γ 2 0 β 0 α γ 2 0 α+γ 2 α γ 2 α+γ 2 α γ 2 0 α+γ β U 4 = U 6 = γ α 2 α+γ 2 0 γ α α+γ 2 γ α 2 0 β 0 γ α 2 0 α+γ 2 γ α 2 α+γ 2 γ α 2 0 α+γ β
14 To make the problem more tractable we work with an energy that captures the essential behaviour of ϕ but becomes infinite off the wells - we invoke Γ-convergence. Let and ψ : M+ 3 3 (p > 3) - s.t. K := SO (3) 6 SO (3) U i i=1 R - lower semicontinuous and p-coercive ψ (A) 0 and ψ (A) = 0 A K. Define I k (ν) := ν x, kψ + ϕ dx. Ω
15 To make the problem more tractable we work with an energy that captures the essential behaviour of ϕ but becomes infinite off the wells - we invoke Γ-convergence. Let and ψ : M+ 3 3 (p > 3) - s.t. K := SO (3) 6 SO (3) U i i=1 R - lower semicontinuous and p-coercive ψ (A) 0 and ψ (A) = 0 A K. Define I k (ν) := ν x, kψ + ϕ dx. Ω
16 Claim: I k and Γ I w.r.t the weak- topology of L ( ( w Ω; C0 M 3 3 ) ) δ Ω ν x (SO (3)) dx, where I (ν) = +, ν x (SO (3)) = SO(3) dν x (A) is the volume fraction of austenite at x Ω. Note: Young measures lie in the closed unit ball of L w ( Ω; C0 ( M 3 3 ) ) = L 1 ( Ω; C 0 ( M 3 3 )) supp ν K otherwise.
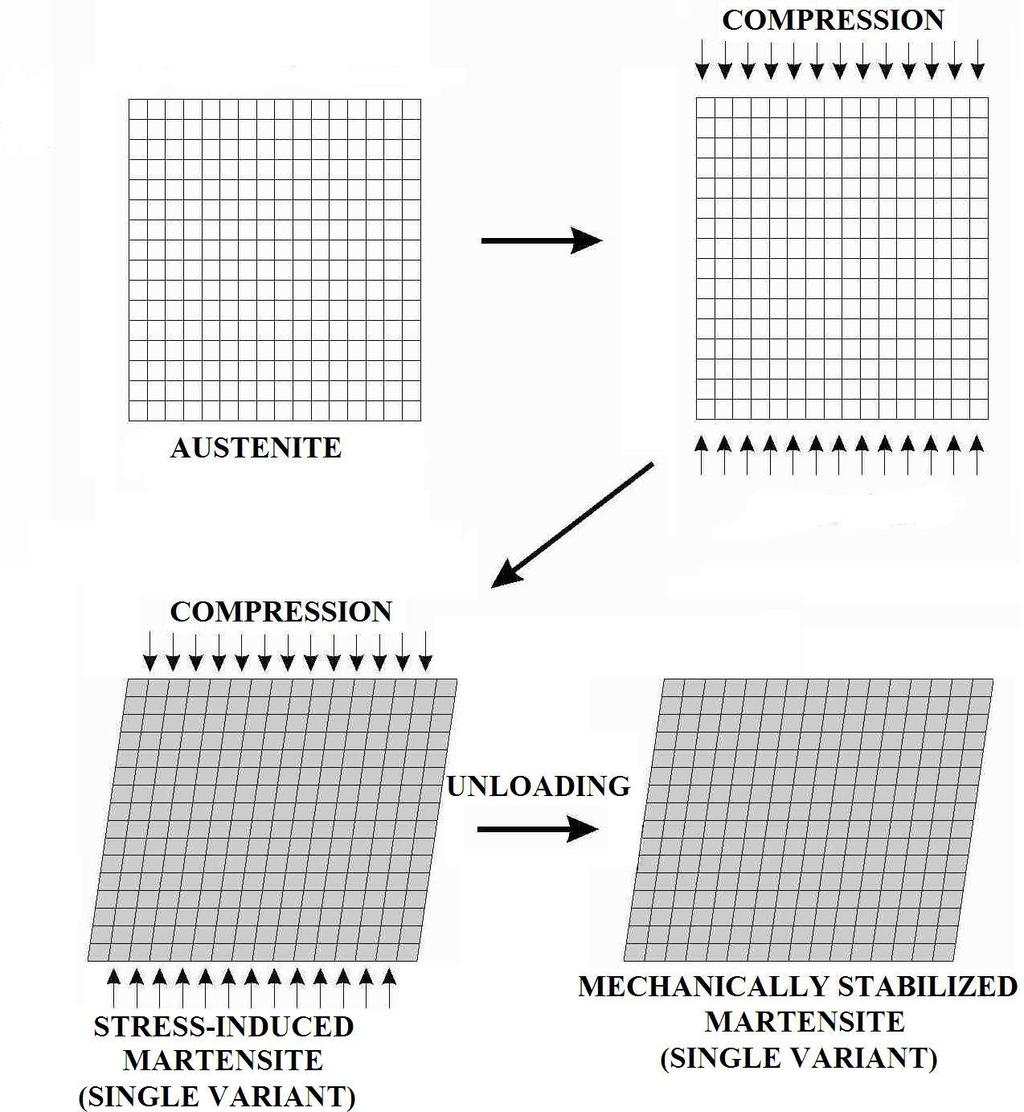
17 For convenience we will write I (ν) = Ω ν x, W dx where the energy density W is given by δ, A SO (3) W (A) = 0, A 6 i=1 SO (3) U i +, otherwise. Denote the mechanically stabilized variant of martensite by U s so that the homogeneous gradient Young measure δ Us corresponds to a pure phase of U s.
18 For convenience we will write I (ν) = Ω ν x, W dx where the energy density W is given by δ, A SO (3) W (A) = 0, A 6 i=1 SO (3) U i +, otherwise. Denote the mechanically stabilized variant of martensite by U s so that the homogeneous gradient Young measure δ Us corresponds to a pure phase of U s.
19 Admissible measures Consider variations of δ Us which are localized in the interior, on faces, edges and at corners denoted by A i, A f, A e and A c. interior S face S edge S corner S We require: ν x = δ Us, x / S and y (x) = U s x, x S Ω (Dy (x) = ν x ). For faces, edges and corners S Ω is a free boundary.
20 In addition, we assume that det U s 1 and that det Dy (x) dx vol y (Ω) (C-N) Ω for the underlying deformations of admissible measures. (C-N) was introduced by Ciarlet & Nečas as a way to describe non-interpenetration of matter ensuring the a.e. injectivity of minimizers. Here, (C-N) guarantees that minimizers are homeomorphic and excludes a certain kind of self-contact of the boundary. Note: These conditions will only be relevant for faces and edges.
21 In addition, we assume that det U s 1 and that det Dy (x) dx vol y (Ω) (C-N) Ω for the underlying deformations of admissible measures. (C-N) was introduced by Ciarlet & Nečas as a way to describe non-interpenetration of matter ensuring the a.e. injectivity of minimizers. Here, (C-N) guarantees that minimizers are homeomorphic and excludes a certain kind of self-contact of the boundary. Note: These conditions will only be relevant for faces and edges.
22 For s = 1,..., 6, define M s = {e S 2 : U s e = max i {1,...,6} { U ie, 1e }} and M 1 s = {e S 2 : cof U s e = max i {1,...,6} { cof U ie, 1e }} Call vectors in M s and M 1 s, maximal directions for U s and Us 1. Main result: Let Ω be a parallelepiped (really, any convex polyhedron) with edges along directions in M s Us 1 1 If there exists ν A i A f A e A c such that I (ν) < I (δ Us ), then ν A c. M 1 s. 2 For any corner, there exists ν A c such that I (ν) < I (δ Us ). This says that austenite must and does nucleate at a corner.
23 For s = 1,..., 6, define M s = {e S 2 : U s e = max i {1,...,6} { U ie, 1e }} and M 1 s = {e S 2 : cof U s e = max i {1,...,6} { cof U ie, 1e }} Call vectors in M s and M 1 s, maximal directions for U s and Us 1. Main result: Let Ω be a parallelepiped (really, any convex polyhedron) with edges along directions in M s Us 1 1 If there exists ν A i A f A e A c such that I (ν) < I (δ Us ), then ν A c. M 1 s. 2 For any corner, there exists ν A c such that I (ν) < I (δ Us ). This says that austenite must and does nucleate at a corner.
24 Corners Quasiconvexity at U s at a corner: I (ν) I (δ Us ) ν A c ν x = δ Us S
25 Loss of quasiconvexity ν x = δ Us ν x = λδ Us + (1 λ) δ QUl ν x = δ R Then ν x (SO (3)) > 0 = I (ν) < 0 = I (δ Us ) proving part 2 of the result.
26 Interior Need to show: ν A i I (ν) I (δ Us ) ( ν x (SO (3)) = 0 a.e) ν x = δ Us S
27 Definition A function W : M 3 3 R {+ } is quasiconvex at F M 3 3 if for any homogeneous gradient Young measure µ with µ = F, W (F ) µ, W. Lemma: If W is quasiconvex at U s then I (ν) I (δ Us ) for all ν A i and nucleation cannot occur in the interior. Proof. Average the measure ν A i and note that the energy remains the same.
28 Definition A function W : M 3 3 R {+ } is quasiconvex at F M 3 3 if for any homogeneous gradient Young measure µ with µ = F, W (F ) µ, W. Lemma: If W is quasiconvex at U s then I (ν) I (δ Us ) for all ν A i and nucleation cannot occur in the interior. Proof. Average the measure ν A i and note that the energy remains the same.
29 Claim: W is quasiconvex at U s. Proof. We may assume that supp µ K and then can show that µ = U s = µ (SO (3)) = 0. This is precisely what we need to prove as then µ, W = 0 = W (U s ). Reminder: W (F ) < 0 F SO (3) Note: We show µ (SO (3)) = 0 using only that µ = U s NOT its homogeneity; we use this again for faces and edges. Also, (C-N) and det U s 1 is not needed and quasiconvexity in the interior is irrespective of the orientation of Ω.
30 Claim: W is quasiconvex at U s. Proof. We may assume that supp µ K and then can show that µ = U s = µ (SO (3)) = 0. This is precisely what we need to prove as then µ, W = 0 = W (U s ). Reminder: W (F ) < 0 F SO (3) Note: We show µ (SO (3)) = 0 using only that µ = U s NOT its homogeneity; we use this again for faces and edges. Also, (C-N) and det U s 1 is not needed and quasiconvexity in the interior is irrespective of the orientation of Ω.
31 Faces and Edges Need to show: I (ν) I (δ Us ) ν A f I (ν) I (δ Us ) ν A e ν x = δ Us ν x = δ Us S S Definition: quasiconvexity at faces (Ball/Marsden) quasiconvexity at edges
32 We involve the maximal directions for U s and U 1 s S y (S) e y r (t) = x 1 + te x 1 x 2 U s x 1 U s x 2 y (r (t))
33 S if e M s y (S) e y r (t) = x 1 + te x 1 x 2 U s x 1 U s x 2 y (r (t)) = U s r (t)
34 S if e M s y (S) e y x 1 x 2 U s x 1 U s x 2 ν x = Dy (x) = U s
35 S if e M s y (S) e y x 1 x 2 U s x 1 U s x 2 ν x = Dy (x) = U s = I (ν) I (δ Us )
36 The (C-N) condition excludes the following self-contact: S y (S) e y Then
37 S y (S) e y x 1 x 2 U s x 1 U s x 2 r (t) U s e
38 if U s e M 1 s (and det U s 1) S y (S) e y 1 x 1 x 2 U s x 1 U s x 2 y 1 (r (t)) = Us 1 r (t) r (t) U s e
39 if U s e M 1 s (and det U s 1) S y (S) e y 1 x 1 x 2 U s x 1 U s x 2
40 if U s e M 1 s (and det U s 1) S y (S) e y 1 x 1 x 2 U s x 1 U s x 2 ν x = Dy (x) = U s = I (ν) I (δ Us )

41 Figure: All edges our result applies to for s = 1 (lattice parameters obtained by Seiner).
.")
42 Figure: Normals to all faces our result applies to for s = 1 (lattice parameters obtained by Seiner).
43 Remark on Grabosky & Mengesha s work The sufficiency proof is based on a decomposition lemma (I. Fonseca/S. Müller/P. Pedregal) splitting variations into a strong and a weak part. The strong part localizes and cannot lower the energy due to the quasiconvexity conditions, whereas, the weak part cannot lower the energy due to the positivity of the second variation. Departing from our singular energy and using the machinery of Grabovsky & Mengesha, one could hope to show that whenever ν is sufficiently close to δ Us with I (ν) < I (δ Us ) then ν must involve nucleation at a corner. Thank you.
44 Remark on Grabosky & Mengesha s work The sufficiency proof is based on a decomposition lemma (I. Fonseca/S. Müller/P. Pedregal) splitting variations into a strong and a weak part. The strong part localizes and cannot lower the energy due to the quasiconvexity conditions, whereas, the weak part cannot lower the energy due to the positivity of the second variation. Departing from our singular energy and using the machinery of Grabovsky & Mengesha, one could hope to show that whenever ν is sufficiently close to δ Us with I (ν) < I (δ Us ) then ν must involve nucleation at a corner. Thank you.
45
46
47 back
MICROSTRUCTURE GENESIS AND MORPHOLOGY
 MICROSTRUCTURE GENESIS AND MORPHOLOGY SIR JOHN BALL The general structure of our lectures will be as follows: (1) General problem of predicting microstructure morphology, (2) Nonclassical austenite-martensite
MICROSTRUCTURE GENESIS AND MORPHOLOGY SIR JOHN BALL The general structure of our lectures will be as follows: (1) General problem of predicting microstructure morphology, (2) Nonclassical austenite-martensite
Direct approach to the problem of strong local minima in Calculus of Variations
 Direct approach to the problem of strong local minima in Calculus of Variations Yury Grabovsky Tadele Mengesha Calculus of Variations and PDE, Vol. 29, No. 1, (2007), pp. 59 83. Abstract The paper introduces
Direct approach to the problem of strong local minima in Calculus of Variations Yury Grabovsky Tadele Mengesha Calculus of Variations and PDE, Vol. 29, No. 1, (2007), pp. 59 83. Abstract The paper introduces
Barbora Benešová Research statement
 Barbora Benešová Research statement Institute for Mathematics, University of Würzburg Emil- Fischer-Straße 40 D-97074 Würzburg, Germany +49 (0)931 31-85447 barbora.benesova@gmail.com,barbora.benesova@mathematik.uni-wuerzburg.de
Barbora Benešová Research statement Institute for Mathematics, University of Würzburg Emil- Fischer-Straße 40 D-97074 Würzburg, Germany +49 (0)931 31-85447 barbora.benesova@gmail.com,barbora.benesova@mathematik.uni-wuerzburg.de
Local invertibility in Sobolev spaces. Carlos Mora-Corral
 1/24 Local invertibility in Sobolev spaces Carlos Mora-Corral University Autonoma of Madrid (joint work with Marco Barchiesi and Duvan Henao) 2/24 Nonlinear Elasticity Calculus of Variations approach A
1/24 Local invertibility in Sobolev spaces Carlos Mora-Corral University Autonoma of Madrid (joint work with Marco Barchiesi and Duvan Henao) 2/24 Nonlinear Elasticity Calculus of Variations approach A
NSF-PIRE Summer School. Geometrically linear theory for shape memory alloys: the effect of interfacial energy
 NSF-PIRE Summer School Geometrically linear theory for shape memory alloys: the effect of interfacial energy Felix Otto Max Planck Institute for Mathematics in the Sciences Leipzig, Germany 1 Goal of mini-course
NSF-PIRE Summer School Geometrically linear theory for shape memory alloys: the effect of interfacial energy Felix Otto Max Planck Institute for Mathematics in the Sciences Leipzig, Germany 1 Goal of mini-course
THEOREMS, ETC., FOR MATH 516
 THEOREMS, ETC., FOR MATH 516 Results labeled Theorem Ea.b.c (or Proposition Ea.b.c, etc.) refer to Theorem c from section a.b of Evans book (Partial Differential Equations). Proposition 1 (=Proposition
THEOREMS, ETC., FOR MATH 516 Results labeled Theorem Ea.b.c (or Proposition Ea.b.c, etc.) refer to Theorem c from section a.b of Evans book (Partial Differential Equations). Proposition 1 (=Proposition
CHAPTER 6. Differentiation
 CHPTER 6 Differentiation The generalization from elementary calculus of differentiation in measure theory is less obvious than that of integration, and the methods of treating it are somewhat involved.
CHPTER 6 Differentiation The generalization from elementary calculus of differentiation in measure theory is less obvious than that of integration, and the methods of treating it are somewhat involved.
On the p-laplacian and p-fluids
 LMU Munich, Germany Lars Diening On the p-laplacian and p-fluids Lars Diening On the p-laplacian and p-fluids 1/50 p-laplacian Part I p-laplace and basic properties Lars Diening On the p-laplacian and
LMU Munich, Germany Lars Diening On the p-laplacian and p-fluids Lars Diening On the p-laplacian and p-fluids 1/50 p-laplacian Part I p-laplace and basic properties Lars Diening On the p-laplacian and
APMA 2811Q. Homework #1. Due: 9/25/13. 1 exp ( f (x) 2) dx, I[f] =
![APMA 2811Q. Homework #1. Due: 9/25/13. 1 exp ( f (x) 2) dx, I[f] =](/thumbs/74/71070037.jpg "APMA 2811Q. Homework #1. Due: 9/25/13. 1 exp ( f (x) 2) dx, I[f] =") APMA 8Q Homework # Due: 9/5/3. Ill-posed problems a) Consider I : W,, ) R defined by exp f x) ) dx, where W,, ) = f W,, ) : f) = f) = }. Show that I has no minimizer in A. This problem is not coercive
APMA 8Q Homework # Due: 9/5/3. Ill-posed problems a) Consider I : W,, ) R defined by exp f x) ) dx, where W,, ) = f W,, ) : f) = f) = }. Show that I has no minimizer in A. This problem is not coercive
Quasistatic Nonlinear Viscoelasticity and Gradient Flows
 Quasistatic Nonlinear Viscoelasticity and Gradient Flows Yasemin Şengül University of Coimbra PIRE - OxMOS Workshop on Pattern Formation and Multiscale Phenomena in Materials University of Oxford 26-28
Quasistatic Nonlinear Viscoelasticity and Gradient Flows Yasemin Şengül University of Coimbra PIRE - OxMOS Workshop on Pattern Formation and Multiscale Phenomena in Materials University of Oxford 26-28
COMPUTATIONAL MODELING OF SHAPE MEMORY MATERIALS
 COMPUTATIONAL MODELING OF SHAPE MEMORY MATERIALS Jan Valdman Institute of Information Theory and Automation, Czech Academy of Sciences (Prague) based on joint works with Martin Kružík and Miroslav Frost
COMPUTATIONAL MODELING OF SHAPE MEMORY MATERIALS Jan Valdman Institute of Information Theory and Automation, Czech Academy of Sciences (Prague) based on joint works with Martin Kružík and Miroslav Frost
FILIP RINDLER. Comment...
 THE POSITIVE JACOBIAN CONSTRAINT IN ELASTICITY THEORY AND ORIENTATION-PRESERVING YOUNG MEASURES (CMC MINISCHOOL ON ANALYSIS, GEOMETRY, AND OPTIMAL TRANSPORT, KIAS, SEOUL, REPUBLIC OF KOREA, 24 28 AUGUST
THE POSITIVE JACOBIAN CONSTRAINT IN ELASTICITY THEORY AND ORIENTATION-PRESERVING YOUNG MEASURES (CMC MINISCHOOL ON ANALYSIS, GEOMETRY, AND OPTIMAL TRANSPORT, KIAS, SEOUL, REPUBLIC OF KOREA, 24 28 AUGUST
Existence of minimizers for the pure displacement problem in nonlinear elasticity
 Existence of minimizers for the pure displacement problem in nonlinear elasticity Cristinel Mardare Université Pierre et Marie Curie - Paris 6, Laboratoire Jacques-Louis Lions, Paris, F-75005 France Abstract
Existence of minimizers for the pure displacement problem in nonlinear elasticity Cristinel Mardare Université Pierre et Marie Curie - Paris 6, Laboratoire Jacques-Louis Lions, Paris, F-75005 France Abstract
PARTIAL REGULARITY OF BRENIER SOLUTIONS OF THE MONGE-AMPÈRE EQUATION
 PARTIAL REGULARITY OF BRENIER SOLUTIONS OF THE MONGE-AMPÈRE EQUATION ALESSIO FIGALLI AND YOUNG-HEON KIM Abstract. Given Ω, Λ R n two bounded open sets, and f and g two probability densities concentrated
PARTIAL REGULARITY OF BRENIER SOLUTIONS OF THE MONGE-AMPÈRE EQUATION ALESSIO FIGALLI AND YOUNG-HEON KIM Abstract. Given Ω, Λ R n two bounded open sets, and f and g two probability densities concentrated
On John type ellipsoids
 On John type ellipsoids B. Klartag Tel Aviv University Abstract Given an arbitrary convex symmetric body K R n, we construct a natural and non-trivial continuous map u K which associates ellipsoids to
On John type ellipsoids B. Klartag Tel Aviv University Abstract Given an arbitrary convex symmetric body K R n, we construct a natural and non-trivial continuous map u K which associates ellipsoids to
Priority Programme Optimal Control of Static Contact in Finite Strain Elasticity
 Priority Programme 1962 Optimal Control of Static Contact in Finite Strain Elasticity Anton Schiela, Matthias Stöcklein Non-smooth and Complementarity-based Distributed Parameter Systems: Simulation and
Priority Programme 1962 Optimal Control of Static Contact in Finite Strain Elasticity Anton Schiela, Matthias Stöcklein Non-smooth and Complementarity-based Distributed Parameter Systems: Simulation and
Finite Elements. Colin Cotter. January 18, Colin Cotter FEM
 Finite Elements January 18, 2019 The finite element Given a triangulation T of a domain Ω, finite element spaces are defined according to 1. the form the functions take (usually polynomial) when restricted
Finite Elements January 18, 2019 The finite element Given a triangulation T of a domain Ω, finite element spaces are defined according to 1. the form the functions take (usually polynomial) when restricted
Weak Convergence Methods for Energy Minimization
 Weak Convergence Methods for Energy Minimization Bo Li Department of Mathematics University of California, San Diego E-mail: bli@math.ucsd.edu June 3, 2007 Introduction This compact set of notes present
Weak Convergence Methods for Energy Minimization Bo Li Department of Mathematics University of California, San Diego E-mail: bli@math.ucsd.edu June 3, 2007 Introduction This compact set of notes present
CHAPTER 7. Connectedness
 CHAPTER 7 Connectedness 7.1. Connected topological spaces Definition 7.1. A topological space (X, T X ) is said to be connected if there is no continuous surjection f : X {0, 1} where the two point set
CHAPTER 7 Connectedness 7.1. Connected topological spaces Definition 7.1. A topological space (X, T X ) is said to be connected if there is no continuous surjection f : X {0, 1} where the two point set
9 Radon-Nikodym theorem and conditioning
 Tel Aviv University, 2015 Functions of real variables 93 9 Radon-Nikodym theorem and conditioning 9a Borel-Kolmogorov paradox............. 93 9b Radon-Nikodym theorem.............. 94 9c Conditioning.....................
Tel Aviv University, 2015 Functions of real variables 93 9 Radon-Nikodym theorem and conditioning 9a Borel-Kolmogorov paradox............. 93 9b Radon-Nikodym theorem.............. 94 9c Conditioning.....................
Metric spaces and metrizability
 1 Motivation Metric spaces and metrizability By this point in the course, this section should not need much in the way of motivation. From the very beginning, we have talked about R n usual and how relatively
1 Motivation Metric spaces and metrizability By this point in the course, this section should not need much in the way of motivation. From the very beginning, we have talked about R n usual and how relatively
SMSTC (2017/18) Geometry and Topology 2.
 Geometry and Topology 2.") SMSTC (2017/18) Geometry and Topology 2 Lecture 1: Differentiable Functions and Manifolds in R n Lecturer: Diletta Martinelli (Notes by Bernd Schroers) a wwwsmstcacuk 11 General remarks In this lecture
SMSTC (2017/18) Geometry and Topology 2 Lecture 1: Differentiable Functions and Manifolds in R n Lecturer: Diletta Martinelli (Notes by Bernd Schroers) a wwwsmstcacuk 11 General remarks In this lecture
Notation. General. Notation Description See. Sets, Functions, and Spaces. a b & a b The minimum and the maximum of a and b
 Notation General Notation Description See a b & a b The minimum and the maximum of a and b a + & a f S u The non-negative part, a 0, and non-positive part, (a 0) of a R The restriction of the function
Notation General Notation Description See a b & a b The minimum and the maximum of a and b a + & a f S u The non-negative part, a 0, and non-positive part, (a 0) of a R The restriction of the function
Homogenization in an optimal design problem with quadratic weakly discontinuous objective functional
 Homogenization in an optimal design problem with quadratic weakly discontinuous objective functional Yury Grabovsky Department of Mathematics Temple University Philadelphia, PA 19122 Int. J. Diff. Eq.
Homogenization in an optimal design problem with quadratic weakly discontinuous objective functional Yury Grabovsky Department of Mathematics Temple University Philadelphia, PA 19122 Int. J. Diff. Eq.
arxiv: v4 [math.ap] 6 Jan 2017
![arxiv: v4 [math.ap] 6 Jan 2017](/thumbs/94/119001725.jpg "arxiv: v4 [math.ap] 6 Jan 2017") Weak lower semicontinuity of integral functionals and applications Barbora Benešová 1 & Martin Kružík 2 Nothing takes place in the world whose meaning is not that of some maximum or minimum. Leonhard Paul
Weak lower semicontinuity of integral functionals and applications Barbora Benešová 1 & Martin Kružík 2 Nothing takes place in the world whose meaning is not that of some maximum or minimum. Leonhard Paul
Weak Lower Semicontinuity of Integral Functionals and Applications
 SIAM REVIEW Vol. 59, No. 4, pp. 703 766 c 2017 Society for Industrial and Applied Mathematics Weak Lower Semicontinuity of Integral Functionals and Applications Barbora Benešová Martin Kružík This paper
SIAM REVIEW Vol. 59, No. 4, pp. 703 766 c 2017 Society for Industrial and Applied Mathematics Weak Lower Semicontinuity of Integral Functionals and Applications Barbora Benešová Martin Kružík This paper
INDEX. Bolzano-Weierstrass theorem, for sequences, boundary points, bounded functions, 142 bounded sets, 42 43
 INDEX Abel s identity, 131 Abel s test, 131 132 Abel s theorem, 463 464 absolute convergence, 113 114 implication of conditional convergence, 114 absolute value, 7 reverse triangle inequality, 9 triangle
INDEX Abel s identity, 131 Abel s test, 131 132 Abel s theorem, 463 464 absolute convergence, 113 114 implication of conditional convergence, 114 absolute value, 7 reverse triangle inequality, 9 triangle
A REVIEW OF OPTIMIZATION
 1 OPTIMAL DESIGN OF STRUCTURES (MAP 562) G. ALLAIRE December 17th, 2014 Department of Applied Mathematics, Ecole Polytechnique CHAPTER III A REVIEW OF OPTIMIZATION 2 DEFINITIONS Let V be a Banach space,
1 OPTIMAL DESIGN OF STRUCTURES (MAP 562) G. ALLAIRE December 17th, 2014 Department of Applied Mathematics, Ecole Polytechnique CHAPTER III A REVIEW OF OPTIMIZATION 2 DEFINITIONS Let V be a Banach space,
Cavitation and fracture in nonlinear elasticity
 Cavitation and fracture in nonlinear elasticity Duvan Henao Laboratoire Jacques-Louis Lions Université Pierre et Marie Curie - CNRS Work under the supervision of John M. Ball University of Oxford In collaboration
Cavitation and fracture in nonlinear elasticity Duvan Henao Laboratoire Jacques-Louis Lions Université Pierre et Marie Curie - CNRS Work under the supervision of John M. Ball University of Oxford In collaboration
DEVELOPMENT OF MORSE THEORY
 DEVELOPMENT OF MORSE THEORY MATTHEW STEED Abstract. In this paper, we develop Morse theory, which allows us to determine topological information about manifolds using certain real-valued functions defined
DEVELOPMENT OF MORSE THEORY MATTHEW STEED Abstract. In this paper, we develop Morse theory, which allows us to determine topological information about manifolds using certain real-valued functions defined
fy (X(g)) Y (f)x(g) gy (X(f)) Y (g)x(f)) = fx(y (g)) + gx(y (f)) fy (X(g)) gy (X(f))
) Y (f)x(g) gy (X(f)) Y (g)x(f)) = fx(y (g)) + gx(y (f)) fy (X(g)) gy (X(f))") 1. Basic algebra of vector fields Let V be a finite dimensional vector space over R. Recall that V = {L : V R} is defined to be the set of all linear maps to R. V is isomorphic to V, but there is no canonical
1. Basic algebra of vector fields Let V be a finite dimensional vector space over R. Recall that V = {L : V R} is defined to be the set of all linear maps to R. V is isomorphic to V, but there is no canonical
Additive Combinatorics Lecture 12
 Additive Combinatorics Lecture 12 Leo Goldmakher Scribe: Gal Gross April 4th, 2014 Last lecture we proved the Bohr-to-gAP proposition, but the final step was a bit mysterious we invoked Minkowski s second
Additive Combinatorics Lecture 12 Leo Goldmakher Scribe: Gal Gross April 4th, 2014 Last lecture we proved the Bohr-to-gAP proposition, but the final step was a bit mysterious we invoked Minkowski s second
A SHORT INTRODUCTION TO BANACH LATTICES AND
 CHAPTER A SHORT INTRODUCTION TO BANACH LATTICES AND POSITIVE OPERATORS In tis capter we give a brief introduction to Banac lattices and positive operators. Most results of tis capter can be found, e.g.,
CHAPTER A SHORT INTRODUCTION TO BANACH LATTICES AND POSITIVE OPERATORS In tis capter we give a brief introduction to Banac lattices and positive operators. Most results of tis capter can be found, e.g.,
Group construction in geometric C-minimal non-trivial structures.
 Group construction in geometric C-minimal non-trivial structures. Françoise Delon, Fares Maalouf January 14, 2013 Abstract We show for some geometric C-minimal structures that they define infinite C-minimal
Group construction in geometric C-minimal non-trivial structures. Françoise Delon, Fares Maalouf January 14, 2013 Abstract We show for some geometric C-minimal structures that they define infinite C-minimal
Introduction to Topology
 Introduction to Topology Randall R. Holmes Auburn University Typeset by AMS-TEX Chapter 1. Metric Spaces 1. Definition and Examples. As the course progresses we will need to review some basic notions about
Introduction to Topology Randall R. Holmes Auburn University Typeset by AMS-TEX Chapter 1. Metric Spaces 1. Definition and Examples. As the course progresses we will need to review some basic notions about
Implicit Functions, Curves and Surfaces
 Chapter 11 Implicit Functions, Curves and Surfaces 11.1 Implicit Function Theorem Motivation. In many problems, objects or quantities of interest can only be described indirectly or implicitly. It is then
Chapter 11 Implicit Functions, Curves and Surfaces 11.1 Implicit Function Theorem Motivation. In many problems, objects or quantities of interest can only be described indirectly or implicitly. It is then
Contents: 1. Minimization. 2. The theorem of Lions-Stampacchia for variational inequalities. 3. Γ -Convergence. 4. Duality mapping.
 Minimization Contents: 1. Minimization. 2. The theorem of Lions-Stampacchia for variational inequalities. 3. Γ -Convergence. 4. Duality mapping. 1 Minimization A Topological Result. Let S be a topological
Minimization Contents: 1. Minimization. 2. The theorem of Lions-Stampacchia for variational inequalities. 3. Γ -Convergence. 4. Duality mapping. 1 Minimization A Topological Result. Let S be a topological
The optimal partial transport problem
 The optimal partial transport problem Alessio Figalli Abstract Given two densities f and g, we consider the problem of transporting a fraction m [0, min{ f L 1, g L 1}] of the mass of f onto g minimizing
The optimal partial transport problem Alessio Figalli Abstract Given two densities f and g, we consider the problem of transporting a fraction m [0, min{ f L 1, g L 1}] of the mass of f onto g minimizing
Optimal Transportation. Nonlinear Partial Differential Equations
 Optimal Transportation and Nonlinear Partial Differential Equations Neil S. Trudinger Centre of Mathematics and its Applications Australian National University 26th Brazilian Mathematical Colloquium 2007
Optimal Transportation and Nonlinear Partial Differential Equations Neil S. Trudinger Centre of Mathematics and its Applications Australian National University 26th Brazilian Mathematical Colloquium 2007
Changing coordinates to adapt to a map of constant rank
 Introduction to Submanifolds Most manifolds of interest appear as submanifolds of others e.g. of R n. For instance S 2 is a submanifold of R 3. It can be obtained in two ways: 1 as the image of a map into
Introduction to Submanifolds Most manifolds of interest appear as submanifolds of others e.g. of R n. For instance S 2 is a submanifold of R 3. It can be obtained in two ways: 1 as the image of a map into
On the Relative Strength of Split, Triangle and Quadrilateral Cuts
 On the Relative Strength of Split, Triangle and Quadrilateral Cuts Amitabh Basu Tepper School of Business, Carnegie Mellon University, Pittsburgh, PA 53 abasu@andrew.cmu.edu Pierre Bonami LIF, Faculté
On the Relative Strength of Split, Triangle and Quadrilateral Cuts Amitabh Basu Tepper School of Business, Carnegie Mellon University, Pittsburgh, PA 53 abasu@andrew.cmu.edu Pierre Bonami LIF, Faculté
An O(n) invariant rank 1 convex function that is not polyconvex
 invariant rank 1 convex function that is not polyconvex") THEORETICAL AND APPLIED MECHANICS vol. 28-29, pp. 325-336, Belgrade 2002 Issues dedicated to memory of the Professor Rastko Stojanović An O(n) invariant rank 1 convex function that is not polyconvex M.
THEORETICAL AND APPLIED MECHANICS vol. 28-29, pp. 325-336, Belgrade 2002 Issues dedicated to memory of the Professor Rastko Stojanović An O(n) invariant rank 1 convex function that is not polyconvex M.
Introduction to optimal transport
 Introduction to optimal transport Nicola Gigli May 20, 2011 Content Formulation of the transport problem The notions of c-convexity and c-cyclical monotonicity The dual problem Optimal maps: Brenier s
Introduction to optimal transport Nicola Gigli May 20, 2011 Content Formulation of the transport problem The notions of c-convexity and c-cyclical monotonicity The dual problem Optimal maps: Brenier s
OPTIMIZATION, RELAXATION AND YOUNG MEASURES
 BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 36, Number 1, January 1999, Pages 27 58 S 273-979(99)774- OPTIMIZATION, RELAXATION AND YOUNG MEASURES PABLO PEDREGAL Abstract. We review
BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 36, Number 1, January 1999, Pages 27 58 S 273-979(99)774- OPTIMIZATION, RELAXATION AND YOUNG MEASURES PABLO PEDREGAL Abstract. We review
Preliminary draft only: please check for final version
 ARE211, Fall2012 CALCULUS4: THU, OCT 11, 2012 PRINTED: AUGUST 22, 2012 (LEC# 15) Contents 3. Univariate and Multivariate Differentiation (cont) 1 3.6. Taylor s Theorem (cont) 2 3.7. Applying Taylor theory:
ARE211, Fall2012 CALCULUS4: THU, OCT 11, 2012 PRINTED: AUGUST 22, 2012 (LEC# 15) Contents 3. Univariate and Multivariate Differentiation (cont) 1 3.6. Taylor s Theorem (cont) 2 3.7. Applying Taylor theory:
Math General Topology Fall 2012 Homework 1 Solutions
 Math 535 - General Topology Fall 2012 Homework 1 Solutions Definition. Let V be a (real or complex) vector space. A norm on V is a function : V R satisfying: 1. Positivity: x 0 for all x V and moreover
Math 535 - General Topology Fall 2012 Homework 1 Solutions Definition. Let V be a (real or complex) vector space. A norm on V is a function : V R satisfying: 1. Positivity: x 0 for all x V and moreover
ESTIMATES FOR THE MONGE-AMPERE EQUATION
 GLOBAL W 2,p ESTIMATES FOR THE MONGE-AMPERE EQUATION O. SAVIN Abstract. We use a localization property of boundary sections for solutions to the Monge-Ampere equation obtain global W 2,p estimates under
GLOBAL W 2,p ESTIMATES FOR THE MONGE-AMPERE EQUATION O. SAVIN Abstract. We use a localization property of boundary sections for solutions to the Monge-Ampere equation obtain global W 2,p estimates under
ON SELECTION OF SOLUTIONS TO VECTORIAL HAMILTON-JACOBI SYSTEM
 ON SELECTION OF SOLUTIONS TO VECTORIAL HAMILTON-JACOBI SYSTEM BAISHENG YAN Abstract. In this paper, we discuss some principles on the selection of the solutions of a special vectorial Hamilton-Jacobi system
ON SELECTION OF SOLUTIONS TO VECTORIAL HAMILTON-JACOBI SYSTEM BAISHENG YAN Abstract. In this paper, we discuss some principles on the selection of the solutions of a special vectorial Hamilton-Jacobi system
Before you begin read these instructions carefully.
 MATHEMATICAL TRIPOS Part IB Friday, 8 June, 2012 1:30 pm to 4:30 pm PAPER 4 Before you begin read these instructions carefully. Each question in Section II carries twice the number of marks of each question
MATHEMATICAL TRIPOS Part IB Friday, 8 June, 2012 1:30 pm to 4:30 pm PAPER 4 Before you begin read these instructions carefully. Each question in Section II carries twice the number of marks of each question
Monotonicity formulas for variational problems
 Monotonicity formulas for variational problems Lawrence C. Evans Department of Mathematics niversity of California, Berkeley Introduction. Monotonicity and entropy methods. This expository paper is a revision
Monotonicity formulas for variational problems Lawrence C. Evans Department of Mathematics niversity of California, Berkeley Introduction. Monotonicity and entropy methods. This expository paper is a revision
On two-dimensional ferromagnetism
 Proceedings of the Royal Society of Edinburgh, 139A, 575 594, 2009 On two-dimensional ferromagnetism Pablo Pedregal ETSI Industriales, Universidad de Castilla-La Mancha, 13071 Ciudad Real, Spain (pablo.pedregal@uclm.es)
Proceedings of the Royal Society of Edinburgh, 139A, 575 594, 2009 On two-dimensional ferromagnetism Pablo Pedregal ETSI Industriales, Universidad de Castilla-La Mancha, 13071 Ciudad Real, Spain (pablo.pedregal@uclm.es)
HARMONIC ANALYSIS. Date:
 HARMONIC ANALYSIS Contents. Introduction 2. Hardy-Littlewood maximal function 3. Approximation by convolution 4. Muckenhaupt weights 4.. Calderón-Zygmund decomposition 5. Fourier transform 6. BMO (bounded
HARMONIC ANALYSIS Contents. Introduction 2. Hardy-Littlewood maximal function 3. Approximation by convolution 4. Muckenhaupt weights 4.. Calderón-Zygmund decomposition 5. Fourier transform 6. BMO (bounded
Follow links Class Use and other Permissions. For more information, send to:
 COPYRIGHT NOTICE: Kari Astala, Tadeusz Iwaniec & Gaven Martin: Elliptic Partial Differential Equations and Quasiconformal Mappings in the Plane is published by Princeton University Press and copyrighted,
COPYRIGHT NOTICE: Kari Astala, Tadeusz Iwaniec & Gaven Martin: Elliptic Partial Differential Equations and Quasiconformal Mappings in the Plane is published by Princeton University Press and copyrighted,
Deforming conformal metrics with negative Bakry-Émery Ricci Tensor on manifolds with boundary
 Deforming conformal metrics with negative Bakry-Émery Ricci Tensor on manifolds with boundary Weimin Sheng (Joint with Li-Xia Yuan) Zhejiang University IMS, NUS, 8-12 Dec 2014 1 / 50 Outline 1 Prescribing
Deforming conformal metrics with negative Bakry-Émery Ricci Tensor on manifolds with boundary Weimin Sheng (Joint with Li-Xia Yuan) Zhejiang University IMS, NUS, 8-12 Dec 2014 1 / 50 Outline 1 Prescribing
Local invertibility in Sobolev spaces with applications to nematic elastomers and magnetoelasticity
 Local invertibility in Sobolev spaces with applications to nematic elastomers and magnetoelasticity Marco Barchiesi, Duvan Henao and Carlos Mora-Corral September 2, 2015 Abstract We define a class of deformations
Local invertibility in Sobolev spaces with applications to nematic elastomers and magnetoelasticity Marco Barchiesi, Duvan Henao and Carlos Mora-Corral September 2, 2015 Abstract We define a class of deformations
Algebraic Varieties. Chapter Algebraic Varieties
 Chapter 12 Algebraic Varieties 12.1 Algebraic Varieties Let K be a field, n 1 a natural number, and let f 1,..., f m K[X 1,..., X n ] be polynomials with coefficients in K. Then V = {(a 1,..., a n ) :
Chapter 12 Algebraic Varieties 12.1 Algebraic Varieties Let K be a field, n 1 a natural number, and let f 1,..., f m K[X 1,..., X n ] be polynomials with coefficients in K. Then V = {(a 1,..., a n ) :
Solutions Definition 2: a solution
 Solutions As was stated before, one of the goals in this course is to solve, or find solutions of differential equations. In the next definition we consider the concept of a solution of an ordinary differential
Solutions As was stated before, one of the goals in this course is to solve, or find solutions of differential equations. In the next definition we consider the concept of a solution of an ordinary differential
A Ginzburg-Landau approach to dislocations. Marcello Ponsiglione Sapienza Università di Roma
 Marcello Ponsiglione Sapienza Università di Roma Description of a dislocation line A deformed crystal C can be described by The displacement function u : C R 3. The strain function β = u. A dislocation
Marcello Ponsiglione Sapienza Università di Roma Description of a dislocation line A deformed crystal C can be described by The displacement function u : C R 3. The strain function β = u. A dislocation
1. Simplify the following. Solution: = {0} Hint: glossary: there is for all : such that & and
 Topology MT434P Problems/Homework Recommended Reading: Munkres, J.R. Topology Hatcher, A. Algebraic Topology, http://www.math.cornell.edu/ hatcher/at/atpage.html For those who have a lot of outstanding
Topology MT434P Problems/Homework Recommended Reading: Munkres, J.R. Topology Hatcher, A. Algebraic Topology, http://www.math.cornell.edu/ hatcher/at/atpage.html For those who have a lot of outstanding
ME185 Introduction to Continuum Mechanics
 Fall, 0 ME85 Introduction to Continuum Mechanics The attached pages contain four previous midterm exams for this course. Each midterm consists of two pages. As you may notice, many of the problems are
Fall, 0 ME85 Introduction to Continuum Mechanics The attached pages contain four previous midterm exams for this course. Each midterm consists of two pages. As you may notice, many of the problems are
MULTISCALE RESOLUTION IN THE COMPUTATION OF CRYSTALLINE MICROSTRUCTURE
 R S R MULISCALE RESOLUIO I HE COMPUAIO OF CRYSALLIE MICROSRUCURE SÖRE BARELS AD ADREAS PROHL ABSRAC his paper addresses the numerical approximation of microstructures in crystalline phase transitions without
R S R MULISCALE RESOLUIO I HE COMPUAIO OF CRYSALLIE MICROSRUCURE SÖRE BARELS AD ADREAS PROHL ABSRAC his paper addresses the numerical approximation of microstructures in crystalline phase transitions without
5 Measure theory II. (or. lim. Prove the proposition. 5. For fixed F A and φ M define the restriction of φ on F by writing.
 5 Measure theory II 1. Charges (signed measures). Let (Ω, A) be a σ -algebra. A map φ: A R is called a charge, (or signed measure or σ -additive set function) if φ = φ(a j ) (5.1) A j for any disjoint
5 Measure theory II 1. Charges (signed measures). Let (Ω, A) be a σ -algebra. A map φ: A R is called a charge, (or signed measure or σ -additive set function) if φ = φ(a j ) (5.1) A j for any disjoint
Reading group: Calculus of Variations and Optimal Control Theory by Daniel Liberzon
 : Calculus of Variations and Optimal Control Theory by Daniel Liberzon 16th March 2017 1 / 30 Content 1 2 Recall on finite-dimensional of a global minimum 3 Infinite-dimensional 4 2 / 30 Content 1 2 Recall
: Calculus of Variations and Optimal Control Theory by Daniel Liberzon 16th March 2017 1 / 30 Content 1 2 Recall on finite-dimensional of a global minimum 3 Infinite-dimensional 4 2 / 30 Content 1 2 Recall
Switching, sparse and averaged control
 Switching, sparse and averaged control Enrique Zuazua Ikerbasque & BCAM Basque Center for Applied Mathematics Bilbao - Basque Country- Spain zuazua@bcamath.org http://www.bcamath.org/zuazua/ WG-BCAM, February
Switching, sparse and averaged control Enrique Zuazua Ikerbasque & BCAM Basque Center for Applied Mathematics Bilbao - Basque Country- Spain zuazua@bcamath.org http://www.bcamath.org/zuazua/ WG-BCAM, February
MATH 51H Section 4. October 16, Recall what it means for a function between metric spaces to be continuous:
 MATH 51H Section 4 October 16, 2015 1 Continuity Recall what it means for a function between metric spaces to be continuous: Definition. Let (X, d X ), (Y, d Y ) be metric spaces. A function f : X Y is
MATH 51H Section 4 October 16, 2015 1 Continuity Recall what it means for a function between metric spaces to be continuous: Definition. Let (X, d X ), (Y, d Y ) be metric spaces. A function f : X Y is
1 Differentiable manifolds and smooth maps
 1 Differentiable manifolds and smooth maps Last updated: April 14, 2011. 1.1 Examples and definitions Roughly, manifolds are sets where one can introduce coordinates. An n-dimensional manifold is a set
1 Differentiable manifolds and smooth maps Last updated: April 14, 2011. 1.1 Examples and definitions Roughly, manifolds are sets where one can introduce coordinates. An n-dimensional manifold is a set
Regularity of Minimizers in Nonlinear Elasticity the Case of a One-Well Problem in Nonlinear Elasticity
 TECHNISCHE MECHANIK, 32, 2-5, (2012), 189 194 submitted: November 1, 2011 Regularity of Minimizers in Nonlinear Elasticity the Case of a One-Well Problem in Nonlinear Elasticity G. Dolzmann In this note
TECHNISCHE MECHANIK, 32, 2-5, (2012), 189 194 submitted: November 1, 2011 Regularity of Minimizers in Nonlinear Elasticity the Case of a One-Well Problem in Nonlinear Elasticity G. Dolzmann In this note
A geometric proof of the spectral theorem for real symmetric matrices
 0 0 0 A geometric proof of the spectral theorem for real symmetric matrices Robert Sachs Department of Mathematical Sciences George Mason University Fairfax, Virginia 22030 rsachs@gmu.edu January 6, 2011
0 0 0 A geometric proof of the spectral theorem for real symmetric matrices Robert Sachs Department of Mathematical Sciences George Mason University Fairfax, Virginia 22030 rsachs@gmu.edu January 6, 2011
Envelope Theorems for Arbitrary Parametrized Choice Sets
 Envelope Theorems for Arbitrary Parametrized Choice Sets Antoine LOEPER 1 and Paul Milgrom January 2009 (PRELIMINARY) 1 Managerial Economics and Decision Sciences, Kellogg School of Management, Northwestern
Envelope Theorems for Arbitrary Parametrized Choice Sets Antoine LOEPER 1 and Paul Milgrom January 2009 (PRELIMINARY) 1 Managerial Economics and Decision Sciences, Kellogg School of Management, Northwestern
Robust error estimates for regularization and discretization of bang-bang control problems
 Robust error estimates for regularization and discretization of bang-bang control problems Daniel Wachsmuth September 2, 205 Abstract We investigate the simultaneous regularization and discretization of
Robust error estimates for regularization and discretization of bang-bang control problems Daniel Wachsmuth September 2, 205 Abstract We investigate the simultaneous regularization and discretization of
ON SPACE-FILLING CURVES AND THE HAHN-MAZURKIEWICZ THEOREM
 ON SPACE-FILLING CURVES AND THE HAHN-MAZURKIEWICZ THEOREM ALEXANDER KUPERS Abstract. These are notes on space-filling curves, looking at a few examples and proving the Hahn-Mazurkiewicz theorem. This theorem
ON SPACE-FILLING CURVES AND THE HAHN-MAZURKIEWICZ THEOREM ALEXANDER KUPERS Abstract. These are notes on space-filling curves, looking at a few examples and proving the Hahn-Mazurkiewicz theorem. This theorem
1 The Local-to-Global Lemma
 Point-Set Topology Connectedness: Lecture 2 1 The Local-to-Global Lemma In the world of advanced mathematics, we are often interested in comparing the local properties of a space to its global properties.
Point-Set Topology Connectedness: Lecture 2 1 The Local-to-Global Lemma In the world of advanced mathematics, we are often interested in comparing the local properties of a space to its global properties.
CONSTRAINED ENVELOPE FOR A GENERAL CLASS OF DESIGN PROBLEMS. Ernesto Aranda and Pablo Pedregal
 PROCEEDINGS OF THE FOURTH INTERNATIONAL CONFERENCE ON DYNAICAL SYSTES AND DIFFERENTIAL EQUATIONS ay 4 7, 00, Wilmington, NC, USA pp. 30-41 CONSTRAINED ENVELOPE FOR A GENERAL CLASS OF DESIGN PROBLES Ernesto
PROCEEDINGS OF THE FOURTH INTERNATIONAL CONFERENCE ON DYNAICAL SYSTES AND DIFFERENTIAL EQUATIONS ay 4 7, 00, Wilmington, NC, USA pp. 30-41 CONSTRAINED ENVELOPE FOR A GENERAL CLASS OF DESIGN PROBLES Ernesto
ON THE SHAPE OF LIQUID DROPS AND CRYSTALS IN THE SMALL MASS REGIME
 ON THE SHAPE OF LIQUID DROPS AND CRYSTALS IN THE SMALL MASS REGIME A. FIGALLI AND F. MAGGI Abstract. We consider liquid drops or crystals lying in equilibrium under the action of a potential energy. For
ON THE SHAPE OF LIQUID DROPS AND CRYSTALS IN THE SMALL MASS REGIME A. FIGALLI AND F. MAGGI Abstract. We consider liquid drops or crystals lying in equilibrium under the action of a potential energy. For
Soft elasticity and microstructure in smectic C elastomers
 Soft elasticity and microstructure in smectic C elastomers August 21, 2006 James Adams 1, Sergio Conti 1, and Antonio DeSimone 2 1 Fachbereich Mathematik, Universität Duisburg-Essen Lotharstr. 65, 47057
Soft elasticity and microstructure in smectic C elastomers August 21, 2006 James Adams 1, Sergio Conti 1, and Antonio DeSimone 2 1 Fachbereich Mathematik, Universität Duisburg-Essen Lotharstr. 65, 47057
Small energy regularity for a fractional Ginzburg-Landau system
 Small energy regularity for a fractional Ginzburg-Landau system Yannick Sire University Aix-Marseille Work in progress with Vincent Millot (Univ. Paris 7) The fractional Ginzburg-Landau system We are interest
Small energy regularity for a fractional Ginzburg-Landau system Yannick Sire University Aix-Marseille Work in progress with Vincent Millot (Univ. Paris 7) The fractional Ginzburg-Landau system We are interest
On the energy release rate in finite strain elasticity
 On the energy release rate in finite strain elasticity Dorothee Knees Alexander Mielke Weierstrass Institute for Applied Analysis and Stochastics Mohrenstr. 39, 10117 Berlin, Germany knees, mielke@wias-berlin.de
On the energy release rate in finite strain elasticity Dorothee Knees Alexander Mielke Weierstrass Institute for Applied Analysis and Stochastics Mohrenstr. 39, 10117 Berlin, Germany knees, mielke@wias-berlin.de
Multiple integrals: Sufficient conditions for a local minimum, Jacobi and Weierstrass-type conditions
 Multiple integrals: Sufficient conditions for a local minimum, Jacobi and Weierstrass-type conditions March 6, 2013 Contents 1 Wea second variation 2 1.1 Formulas for variation........................
Multiple integrals: Sufficient conditions for a local minimum, Jacobi and Weierstrass-type conditions March 6, 2013 Contents 1 Wea second variation 2 1.1 Formulas for variation........................
b i (µ, x, s) ei ϕ(x) µ s (dx) ds (2) i=1
 ei ϕ(x) µ s (dx) ds (2) i=1") NONLINEAR EVOLTION EQATIONS FOR MEASRES ON INFINITE DIMENSIONAL SPACES V.I. Bogachev 1, G. Da Prato 2, M. Röckner 3, S.V. Shaposhnikov 1 The goal of this work is to prove the existence of a solution to
NONLINEAR EVOLTION EQATIONS FOR MEASRES ON INFINITE DIMENSIONAL SPACES V.I. Bogachev 1, G. Da Prato 2, M. Röckner 3, S.V. Shaposhnikov 1 The goal of this work is to prove the existence of a solution to
+ 2x sin x. f(b i ) f(a i ) < ɛ. i=1. i=1
 f(a i ) < ɛ. i=1. i=1") Appendix To understand weak derivatives and distributional derivatives in the simplest context of functions of a single variable, we describe without proof some results from real analysis (see [7] and
Appendix To understand weak derivatives and distributional derivatives in the simplest context of functions of a single variable, we describe without proof some results from real analysis (see [7] and
Exercise 1 (Formula for connection 1-forms) Using the first structure equation, show that
 Using the first structure equation, show that") 1 Stokes s Theorem Let D R 2 be a connected compact smooth domain, so that D is a smooth embedded circle. Given a smooth function f : D R, define fdx dy fdxdy, D where the left-hand side is the integral
1 Stokes s Theorem Let D R 2 be a connected compact smooth domain, so that D is a smooth embedded circle. Given a smooth function f : D R, define fdx dy fdxdy, D where the left-hand side is the integral
Coupled second order singular perturbations for phase transitions
 Coupled second order singular perturbations for phase transitions CMU 06/09/11 Ana Cristina Barroso, Margarida Baía, Milena Chermisi, JM Introduction Let Ω R d with Lipschitz boundary ( container ) and
Coupled second order singular perturbations for phase transitions CMU 06/09/11 Ana Cristina Barroso, Margarida Baía, Milena Chermisi, JM Introduction Let Ω R d with Lipschitz boundary ( container ) and
PICARD S THEOREM STEFAN FRIEDL
 PICARD S THEOREM STEFAN FRIEDL Abstract. We give a summary for the proof of Picard s Theorem. The proof is for the most part an excerpt of [F]. 1. Introduction Definition. Let U C be an open subset. A
PICARD S THEOREM STEFAN FRIEDL Abstract. We give a summary for the proof of Picard s Theorem. The proof is for the most part an excerpt of [F]. 1. Introduction Definition. Let U C be an open subset. A
1 Directional Derivatives and Differentiability
 Wednesday, January 18, 2012 1 Directional Derivatives and Differentiability Let E R N, let f : E R and let x 0 E. Given a direction v R N, let L be the line through x 0 in the direction v, that is, L :=
Wednesday, January 18, 2012 1 Directional Derivatives and Differentiability Let E R N, let f : E R and let x 0 E. Given a direction v R N, let L be the line through x 0 in the direction v, that is, L :=
at time t, in dimension d. The index i varies in a countable set I. We call configuration the family, denoted generically by Φ: U (x i (t) x j (t))
 x j (t))") Notations In this chapter we investigate infinite systems of interacting particles subject to Newtonian dynamics Each particle is characterized by its position an velocity x i t, v i t R d R d at time
Notations In this chapter we investigate infinite systems of interacting particles subject to Newtonian dynamics Each particle is characterized by its position an velocity x i t, v i t R d R d at time
Stability of boundary measures
 Stability of boundary measures F. Chazal D. Cohen-Steiner Q. Mérigot INRIA Saclay - Ile de France LIX, January 2008 Point cloud geometry Given a set of points sampled near an unknown shape, can we infer
Stability of boundary measures F. Chazal D. Cohen-Steiner Q. Mérigot INRIA Saclay - Ile de France LIX, January 2008 Point cloud geometry Given a set of points sampled near an unknown shape, can we infer
Course 224: Geometry - Continuity and Differentiability
 Course 224: Geometry - Continuity and Differentiability Lecture Notes by Prof. David Simms L A TEXed by Chris Blair 1 Continuity Consider M, N finite dimensional real or complex vector spaces. What does
Course 224: Geometry - Continuity and Differentiability Lecture Notes by Prof. David Simms L A TEXed by Chris Blair 1 Continuity Consider M, N finite dimensional real or complex vector spaces. What does
Effective Theories and Minimal Energy Configurations for Heterogeneous Multilayers
 Effective Theories and Minimal Energy Configurations for Universität Augsburg, Germany Minneapolis, May 16 th, 2011 1 Overview 1 Motivation 2 Overview 1 Motivation 2 Effective Theories 2 Overview 1 Motivation
Effective Theories and Minimal Energy Configurations for Universität Augsburg, Germany Minneapolis, May 16 th, 2011 1 Overview 1 Motivation 2 Overview 1 Motivation 2 Effective Theories 2 Overview 1 Motivation
Math 117: Topology of the Real Numbers
 Math 117: Topology of the Real Numbers John Douglas Moore November 10, 2008 The goal of these notes is to highlight the most important topics presented in Chapter 3 of the text [1] and to provide a few
Math 117: Topology of the Real Numbers John Douglas Moore November 10, 2008 The goal of these notes is to highlight the most important topics presented in Chapter 3 of the text [1] and to provide a few
GENERALIZED CONVEXITY AND OPTIMALITY CONDITIONS IN SCALAR AND VECTOR OPTIMIZATION
 Chapter 4 GENERALIZED CONVEXITY AND OPTIMALITY CONDITIONS IN SCALAR AND VECTOR OPTIMIZATION Alberto Cambini Department of Statistics and Applied Mathematics University of Pisa, Via Cosmo Ridolfi 10 56124
Chapter 4 GENERALIZED CONVEXITY AND OPTIMALITY CONDITIONS IN SCALAR AND VECTOR OPTIMIZATION Alberto Cambini Department of Statistics and Applied Mathematics University of Pisa, Via Cosmo Ridolfi 10 56124
Probing Fundamental Bounds in Hydrodynamics Using Variational Optimization Methods
 Probing Fundamental Bounds in Hydrodynamics Using Variational Optimization Methods Bartosz Protas and Diego Ayala Department of Mathematics & Statistics McMaster University, Hamilton, Ontario, Canada URL:
Probing Fundamental Bounds in Hydrodynamics Using Variational Optimization Methods Bartosz Protas and Diego Ayala Department of Mathematics & Statistics McMaster University, Hamilton, Ontario, Canada URL:
Euler Equations: local existence
 Euler Equations: local existence Mat 529, Lesson 2. 1 Active scalars formulation We start with a lemma. Lemma 1. Assume that w is a magnetization variable, i.e. t w + u w + ( u) w = 0. If u = Pw then u
Euler Equations: local existence Mat 529, Lesson 2. 1 Active scalars formulation We start with a lemma. Lemma 1. Assume that w is a magnetization variable, i.e. t w + u w + ( u) w = 0. If u = Pw then u
1 k x k. d(x, y) =sup k. y k = max
 =sup k. y k = max") 1 Lecture 13: October 8 Urysohn s metrization theorem. Today, I want to explain some applications of Urysohn s lemma. The first one has to do with the problem of characterizing metric spaces among all
1 Lecture 13: October 8 Urysohn s metrization theorem. Today, I want to explain some applications of Urysohn s lemma. The first one has to do with the problem of characterizing metric spaces among all
On the Uniqueness of Weak Solutions to the 2D Euler Equations
 On the Uniqueness of Weak Solutions to the 2D Euler Equations (properties of the flow) 2009 SIAM Conference on Analysis of PDEs University of California, Riverside 9 December 2009 Bounded vorticity and
On the Uniqueness of Weak Solutions to the 2D Euler Equations (properties of the flow) 2009 SIAM Conference on Analysis of PDEs University of California, Riverside 9 December 2009 Bounded vorticity and
Convex Analysis and Economic Theory Winter 2018
 Division of the Humanities and Social Sciences Ec 181 KC Border Convex Analysis and Economic Theory Winter 2018 Supplement A: Mathematical background A.1 Extended real numbers The extended real number
Division of the Humanities and Social Sciences Ec 181 KC Border Convex Analysis and Economic Theory Winter 2018 Supplement A: Mathematical background A.1 Extended real numbers The extended real number
Isodiametric problem in Carnot groups
 Conference Geometric Measure Theory Université Paris Diderot, 12th-14th September 2012 Isodiametric inequality in R n Isodiametric inequality: where ω n = L n (B(0, 1)). L n (A) 2 n ω n (diam A) n Isodiametric
Conference Geometric Measure Theory Université Paris Diderot, 12th-14th September 2012 Isodiametric inequality in R n Isodiametric inequality: where ω n = L n (B(0, 1)). L n (A) 2 n ω n (diam A) n Isodiametric
Principles of Optimal Control Spring 2008
 MIT OpenCourseWare http://ocw.mit.edu 16.323 Principles of Optimal Control Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 16.323 Lecture
MIT OpenCourseWare http://ocw.mit.edu 16.323 Principles of Optimal Control Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 16.323 Lecture
A MULTISCALE APPROACH IN TOPOLOGY OPTIMIZATION
 1 A MULTISCALE APPROACH IN TOPOLOGY OPTIMIZATION Grégoire ALLAIRE CMAP, Ecole Polytechnique The most recent results were obtained in collaboration with F. de Gournay, F. Jouve, O. Pantz, A.-M. Toader.
1 A MULTISCALE APPROACH IN TOPOLOGY OPTIMIZATION Grégoire ALLAIRE CMAP, Ecole Polytechnique The most recent results were obtained in collaboration with F. de Gournay, F. Jouve, O. Pantz, A.-M. Toader.
(x k ) sequence in F, lim x k = x x F. If F : R n R is a function, level sets and sublevel sets of F are any sets of the form (respectively);
 sequence in F, lim x k = x x F. If F : R n R is a function, level sets and sublevel sets of F are any sets of the form (respectively);") STABILITY OF EQUILIBRIA AND LIAPUNOV FUNCTIONS. By topological properties in general we mean qualitative geometric properties (of subsets of R n or of functions in R n ), that is, those that don t depend
STABILITY OF EQUILIBRIA AND LIAPUNOV FUNCTIONS. By topological properties in general we mean qualitative geometric properties (of subsets of R n or of functions in R n ), that is, those that don t depend
An Asymptotic Property of Schachermayer s Space under Renorming
 Journal of Mathematical Analysis and Applications 50, 670 680 000) doi:10.1006/jmaa.000.7104, available online at http://www.idealibrary.com on An Asymptotic Property of Schachermayer s Space under Renorming
Journal of Mathematical Analysis and Applications 50, 670 680 000) doi:10.1006/jmaa.000.7104, available online at http://www.idealibrary.com on An Asymptotic Property of Schachermayer s Space under Renorming