Research Article A Nonlinear Robust Controller Design for Ship Dynamic Positioning Based on L 2 -Gain Disturbance Rejection
|
|
|
- Shona Chase
- 5 years ago
- Views:
Transcription
1 Control Science and Engineering Volume 26, Article ID , 7 pages Research Article A Nonlinear Robust Controller Design for Ship Dynamic Positioning Based on L 2 -Gain Disturbance Rejection Guoqing Xia, Jingjing Xue, Ang Guo, Caiyun Liu, and Xinghua Chen College of Automation, Harbin Engineering University, No. 45 Nantong Street, Nangang District, Harbin City, Heilongjiang Province, China Correspondence should be addressed to Jingjing Xue; xuejingjing@hrbeu.edu.cn Received August 26; Accepted 22 September 26 Academic Editor: Defeng He Copyright 26 Guoqing Xia et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In ship motion control process, it is difficult to design ship controller due to the effects of environmental disturbances such as wind, waves, current, and unmodelled dynamics. In order to solve these problems, a nonlinear robust controller based on L 2 -gain disturbance rejection is proposed in this paper. To steer ships to the desired position, an error feedback control law on account of Lyapunov functions is designed. Then, to satisfy the L 2 -gain disturbance rejection, proper parameters are chosen based on the system dissipative property. In order to verify the performance of the proposed controller, the MATLAB simulation results in two situations which are without and with the effects of environmental disturbances are demonstrated.. Introduction With the exploration and exploitation of ocean resource and improvement of modern technology, ship Dynamic Positioning (DP) control system is increasingly utilized on floating vessel or platform control systems. DP is defined as follows: Only depend on the propeller can automatically keep the position of floating structure (maintaining in fixed position or presetting tracked for equipment or ship) []. DP control process has experienced several stages, from Proportion Integration Differentiation (PID) control, advanced output feedback control, to nonlinear adaptive control and hybrid control, especially for hybrid DP control which automatically switched among controller set, improving the performance and maneuverability of DP ships [2]. But in ship motion control process, it is difficult to design ship controller due to effects of environmental disturbances suchaswind,waves,current,andunmodelleddynamics.and among control methods of DP system, fuzzy control, backstepping control, neural network control, and hybrid control (see, e.g., [3 ]) are commonly used. Not depending on ship s accurate model, robust fuzzy control by using optimal H control technique on DP ships was designed and had good performance in disturbance rejection and fast response and had good robustness [4]. In order to eliminate the effects of uncertainties, backstepping control method was applied to construct appropriate virtual control law. And neural network control of DP ships was utilized to solve the problem of approximate of uncertainties and unmodelled items [5]. Bateman et al. [6] developed a backstepping method improving ability of control response and disturbance rejecting performanceunderthelowandhighgain.andthearticle[] designed a recursive backstepping controller to maintain ship in fixed position and the controller had good performance of response and maneuvering motion. Chen et al. [2 4] proposed the finite time tracking control method to handle the problem of external disturbances and had good performance. The hybrid control was designed to switch the control situation automatically and had good performance to reject changes of external environment [3]. All of these papers proposed kind of methods to solve the problem of environmental disturbances. In addition, the key to these designed control methods is to ensure system stabilization. L 2 -gain disturbance rejection is especially used to reduce effects of disturbances by choosing proper control schemes and has good performance and robustness. An optimal L 2 -gain disturbance rejection control for linear system was designed based on Lyapunov- Krasovskii theories [5]. López-Martínez et al. [6] applied the problem of L 2 disturbance rejection to a twin-rotor
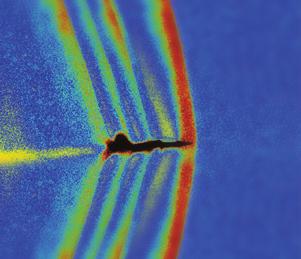
2 2 Control Science and Engineering X e O e r O b ψ Figure : Relationship between Earth-fixed frame and Body-fixed frame. system and designed the L 2 control law with PID control to make system stability in variable speed rotors. Paper [7] designed an uncertain switched nonlinear system to solve the problem of L 2 -gain. In order to handle the external disturbance and input constraint, Xiao et al. [8] proposed an adaptive L 2 -gain controller in the condition of attitude tracking in flexible spacecraft. Ahmed [9] proposed an L 2 - gain disturbance rejection neural controller for nonlinear system. Paper [2] designed a disturbance rejection control method in the base of the theories of L 2 -gain and portcontrolled Hamiltonian system. In this paper, based on L 2 - gain disturbance rejection, the nonlinear robust controller is designed to steer the DP ships to the desired position and solve problems of uncertainties and unmodelled dynamics. The structure of this paper is organized as follows. Section 2 states the control problem of DP ships subject to uncertain terms and disturbances. Section 3 presents the design of the nonlinear robust controller based on L 2 -gain disturbance rejection. MATLAB simulation results without and with the effects of environmental disturbances are demonstrated to verify the effectiveness of the proposed controller. 2. Problem Formulation 2.. DP Ships Kinematics and Dynamics. In order to analyze DP ships kinematics, two reference coordinate systems which include Earth-fixed frame O e -X e Y e Z e and Body-fixed frame O b -X b Y b Z b are introduced in this paper. 3-Degree-Of- Freedom (3 DOF) horizontal motion (surge, sway, and yaw) is usually researched in DP control system. And the relationship between Earth-fixed frame and Body-fixed frame is shown as Figure. For the DP control system, the kinematics and dynamics in low speed condition [2] are described as follows: u η=r(ψ)], M] +D] =τ c +Δ, X b Y b Y e () where, η=[x,y,ψ] T R 3 is the vehicle s position vector in Earth-fixed frame. ] = [u,v,r] T R 3 represents the velocities in Body-fixed frame. M R 3 3 is the system inertial matrix, D R 3 3 represents the strictly positive linear damping matrix, and τ c R 3 is the forces and moments vector produced by thrusters. Δ R 3 isavectorofforces and moments produced by slowly varying environmental disturbances and unmodelled items. R(ψ) R 3 3 is the transformation matrix between Earth-fixed frame and Bodyfixed frame expressed by cos (ψ) sin (ψ) R(ψ)= [ sin (ψ) cos (ψ) ]. (2) [ ] 2.2. Control Objective. The DP control system is to steer the ship to maintain a fixed position or preset tracked position. The desired position vector is η d = [x d,y d,ψ d ] T. The control objective is to design a nonlinear robust control law τ and choose proper parameters which satisfy the L 2 -gain disturbance rejection constrains. Thus the position η is accurately approached to the desired position η d. 3. Nonlinear Robust Controller Design Based on L 2 -Gain Disturbance Rejection In this section, in order to design a backstepping nonlinear robust controller based on L 2 disturbance rejection and achieve the control object, the nonlinear robust controller is designed to steer the DP ship to the desired position and solve problems of uncertainties and unmodelled dynamics. The following dynamic equation of DP ship is derived from (): MR (ψ) η+mr dot η+dr (ψ) η=τ c +Δ. (3) With defining the error e R 3 as e = η η d,the following error dynamic equation based on (3) is written as MR (ψ) e Simply, let +( MR (ψ) R(ψ)R (ψ) + DR (ψ)) e =MR(ψ) η d +τ c +Δ +( MR (ψ) R(ψ)R (ψ) + DR (ψ)) η d. (4) R dot = R (ψ) R(ψ)R (ψ). (5) Thus,theerrordynamicequation(4)isrewrittenas MR (ψ) e+(mr dot +DR (ψ)) e (6) =MR(ψ) η d +(MR dot +DR (ψ)) η d +τ c +Δ.
3 Control Science and Engineering L 2 -Gain Disturbance Rejection. L 2 -gain disturbance rejectionisusedtoreducetheeffectofdisturbancesby choosing proper parameters. In order to analyze the L 2 -gain disturbance rejection of a control system, the definitions of L 2 -gain and system dissipation are introduced in following part. And L 2 -gain can be determined by considering the following nonlinear system [5]: x=f(x) +g(x) u, y=h(x), where, x R n is the state vector of system; u R p represents the input signal; y R p is output vector; f(x), h(x),andg(x) represent the given function vector or matrix. Assumption. The system is a free system and has an equilibrium point, that is f() = when x=.atthesame time, assume h() = ; thusforanyu L 2, y L 2,there exists γ R when L 2 -norm H yu satisfied the condition of (7) H yu = sup y 2 γ. (8) u 2 u 2 = Therefore, L 2 -norm H yu is called L 2 -gain which is less than or equal toγ.and γ is called disturbance rejection factor. Assumption 2. If a positive semidefinite function V(x) (V : x R), V() =, thefollowinginequalityisestablished when T V (x (T)) V(x ()) s (u (τ),y(τ)) dt. (9) For any T>and any input signal u R p,thesystemis called passive system when inequality (9) is established. And inequality (9) is called dissipativeinequality, s(u, y) is energy storage function, and V(x) is the energy storage function. Consider the following system: x=f (x, y), y=f 2 (x, y) + g (x, y) u + g 2 (x, y) w, z=h(x,y), () where x R n is the state vector of system; u R p represents input signal; y R p is output vector; w R p represents disturbance input signal; z R p represents evaluation function with characterization of disturbance rejection performance; f ( ), f 2 ( ), g ( ), g 2 ( ), andh( ) are smooth functions with appropriate dimension or matrix. And the dissipative inequality of system () is V(x,y) 2 (γ2 w 2 z 2 ), () where V(x, y) is energy storage function with the property of positive semidefinite. Thus the L 2 disturbance rejection problem is solved by inequality of () DP Nonlinear Backstepping Controller Design. DP s nonlinear control law is designed based on backstepping theory. The control law τ is designed by error dynamic equation (6) as τ= MR(ψ) η e (MR dot +DR (ψ)) MR (ψ) Ke (MR dot +DR (ψ))ke + u. Thus(6)canberewrittenas ( e+k e) = M R(ψ)(MR dot +DR (ψ)) ( e+ke) +M R(ψ)u+M R(ψ)Δ. η e (2) (3) In order to design the disturbance rejection control law u, define the error varieties x,x 2 R 3 as x =e, x 2 = e+kx, (4) where K R 3 3 is to be designed as parameter matrix; at the same time, let F= M R(ψ)(MR dot +DR (ψ)), G=M R(ψ). (5) Thus, combining (3), (4), and (5), the derivative of x and x 2 is determined as x = Kx +x 2, (6) x 2 =Fx 2 +Gu+GΔ. In order to prove the stability of subsystem x in (4), Lyapunov function V is defined as V = 2 xt x. (7) Thus, the deviation of V is determined as V =x T x = x T Kx +x T x 2. (8) V = x T Kx,whenx 2 =,sothesubsystemwith x is stabilization. And to prove the stability of x 2,Lyapunov function V 2 is defined as V 2 = 2 xt 2 x 2 +V = 2 xt 2 x xt x. (9) Thus deviation of V is determined as V 2 =x T x +x T 2 x 2 = x T Kx +x T 2 ( x 2 +x ). (2) Combine (6) and (2), so V 2 = x T Kx +x T 2 (Fx 2 +Gu+GΔ+x ). (2) Design the feedback control law as u=g ( Fx 2 x kx 2 ), (22)
4 4 Control Science and Engineering where k>is to be designed as parameter. And plug (22) into (2), so (2) is rewritten as V 2 = x T Kx kx T 2 x 2 +x T 2 GΔ. (23) Thus, if Δ= V 2 = x T Kx kx T 2 x 2. (24) If Δ =, consider the following inequality: x T 2 GΔ a xt 2 G 2 Δ 2 + 4a a G 2 x Δ 2 4a. (25) Let k=k +a G,then V 2 x T Kx (k +a G 2 )x T 2 x 2 +a G 2 x Δ 2 4a = x T Kx k x 2 2 a G 2 x 2 2 +a G 2 x Δ 2 4a (26) x T Kx k x Δ 2 4a. V 2 when the following error inequality is workable: x 2 > ρ 2 ak, (27) where ρ istheupperboundofδ. Thus the subsystem with x 2 is stabilization. Thus the Lyapunov stability can be proved based on the above equations from (3) to (26). And the control law is to be designed to make the system stable under L 2 disturbance rejection Efficiency Proof of L 2 -Gain Disturbance Rejection. The control law is derived above without considering the capacity of disturbance rejection. And L 2 -gain disturbance rejection of the robust nonlinear controller in this section is proved. First, evaluation function z mentioned in Section 3.2 is shown as z=[ h ][ x ], (28) h 2 x 2 where h,h 2 are the weighted factors. In order to prove the efficiency of L 2 -gain disturbance rejection, the following dissipative inequality needs to be proved: V 2 2 (γ2 Δ 2 z 2 ). (29) Define auxiliary function T as T=2V 2 γ 2 Δ 2 + z 2. (3) Combining (29) with (3), the auxiliary function T is rewritten as T= 2x T Kx 2kx T 2 x 2 +2x T 2 GΔ γ2 Δ 2 + z 2 x T (K ht h )x x T 2 (2kI ht 2 h 2 γ 2 I) x 2. (3) If the parameters are designed to satisfy the following inequality: Thus T ;thatis, Therefore, K h T h, 2kI h T 2 h 2 γ 2 I. (32) 2 V 2 γ 2 Δ 2 + z 2. (33) V 2 2 (γ2 Δ 2 z 2 ). (34) Parameters should satisfy inequality (32); thus the efficiency of L 2 disturbance rejection can be proved. Therefore the control law is designed as τ= MR (ψ) ( η e + (K+kI)( η η e )+(kk + I) (η η e )) (MR dot +DR (ψ)) ( ( η 2 η e ) 2K(η η e )). 4. Simulation Results (35) To verify the performance of proposed robust nonlinear controller based on L 2 -gain disturbance rejection, it is assessed in the MATLAB simulation environment with a 3-DOF nonlinear model of DP ship. The desired position vector can be given as follows: η d = [2, 3, 5 π 8 ]T. (36) The initial position and attitude vector is η=[,, ] T. (37) The inertia matrix and damping matrix are given as 2.769e + 7 M= [ 5.6e e + 8 ], [ 4.836e e + ] 8.743e + 4 D= [.373e e + 6 ]. [ 2.94e e + 8 ] (38) The simulating time is s and the step time is.2 s. The desired position is a step signal and its derivate is not to be determined. In order to generate the smoothly desired path, the 2-order filter is applied as η d =η d, η d =ω 2 n η d ω 2 n η d δ η d η d 2ζω n η d, (39)
5 Control Science and Engineering y (m) x d y d ψ d Figure 2: The desired position curves. where ω n is the natural frequency, ζ is the relative damping ratio, and δ is the designed parameter. Thus the desired position η d is generated smoothly and the figure of the desired path is shown as Figure 2. Andtovalidatetheeffectivenessofcontroller,twogroups of simulating results are demonstrated without and with the effects of environmental disturbances. And let the slowly varying environmental disturbances Δ be Δ=(sin (.2t) + cos (.2t)) diag (e6 e6 e6). (4) In one situation, without the effects of environmental disturbances, the outputs of ship motion curves (such as theposition,positionerror,andcontrollawτ) areshown as Figures 3, 4, and 5. And the parameters in the designed control law are chosen as K=diag (...), k =.8. (4) From Figures 3, 4, and 5, the desired path is well approached by the real simulating motion path. And the designed control law τ effectively steers the ship motion to the desired position though the position error changing in some upper and lower bounds. The other situation is with the effects of environmental disturbances; the outputs of ship motion curves are demonstrated from Figures 6, 7, and 8. In this condition, the desired path is well approached by the real simulating motion path, and the designed control law τ effectively controls the ship motion to the desired position although the control law is in shock at the first s. And the position error also can be changedinsomeacceptableranges x (m) Figure 3: Ship horizontal motion without environmental disturbances. x error (m) y error (m) ψ error (deg.) Figure 4: The position error of ship without environmental disturbances. τ x τ y τ ψ Figure 5: The curves of τ without environmental disturbances.
6 6 Control Science and Engineering y (m) Conclusions In this paper, the problem of Dynamic Positioning for offshore structures has been researched under the nonlinear robust controller based on L 2 -gain disturbance rejection. At first, the nonlinear controller is designed based on robust nonlinear control theories and the efficiency of L 2 disturbance rejection is proved by designing the parameters. Then, two groups of simulating results are demonstrated without and with the effects of environmental disturbances. And the simulating results validate the performance of the controller x (m) Competing Interests The authors declare that there are no competing interests regarding the publication of this paper. Figure 6: Ship horizontal motion with environmental disturbances. x error (m) y error (m) ψ error (deg.) Figure 7: The position error of ship with environmental disturbances. τ x τ y τ ψ Figure 8: The curves of τ with environmental disturbances. References [] B. Qian, F. Mingyu, and W. Yuanhui, Ship Dynamic Positioning, Science Press, Beijing, China, 2. [2] A. J. Sørensen, A survey of dynamic positioning control systems, Annual Reviews in Control,vol.35,no.,pp.23 36, 2. [3] T.D.Nguyen,A.J.Sørensen,andS.T.Quek, Designofhybrid controller for dynamic positioning from calm to extreme sea conditions, Automatica, vol. 43, no. 5, pp , 27. [4] W. E. Ngongi, J. Du, and R. Wang, Robust fuzzy controller design for dynamic positioning system of ships, International Control Automation & Systems,vol.4,no.,pp. 26, 25. [5] G.Xia,H.Wu,andX.Shao, Adaptivefilteringbacksteppingfor ships steering control without velocity measurements and with input constraints, Mathematical Problems in Engineering, vol. 24, Article ID 28585, 9 pages, 24. [6] A.Bateman,J.Hull,andZ.Lin, Abackstepping-basedlow-andhigh gain design for marine vehicles, Robust & Nonlinear Control,vol.9,no.4,pp ,29. [7] G. Xia, C. Pang, and J. Xue, Fuzzy neural network-based robust adaptive control for dynamic positioning of underwater vehicles with input dead-zone, Intelligent & Fuzzy Systems,vol.29,no.6,pp ,25. [8] M. D. Thekkedan, C. S. Chin, and W. L. Woo, Virtual reality simulation of fuzzy-logic control during underwater dynamic positioning, Marine Science and Application,vol.4, no., pp. 4 24, 25. [9]K.D.Do, Globalrobustadaptivepath-trackingcontrolof underactuated ships under stochastic disturbances, Ocean Engineering, vol., pp , 26. [] T. Elmokadem, M. Zribi, and K. Youcef-Toumi, Trajectory tracking sliding mode control of underactuated AUVs, Nonlinear Dynamics,vol.84,no.2,pp.79 9,26. [] A. Witkowska, Control system design for dynamic positioning using vectorial backstepping, Scientific Journals of the Maritime University of Szczecin Zesz,vol.36,no.8,pp.82 87,23. [2] H. Chen, B. Zhang, T. Zhao, T. Wang, and K. Li, Finite-time tracking control for extended nonholonomic chained-form systems with parametric uncertainty and external disturbance, Vibration and Control,26. [3] H. Chen, B. Li, B. Zhang et al., Global finite-time partial stabilization for a class of nonholonomic mobile robots subject
7 Control Science and Engineering 7 to input saturation, Advanced Robotic Systems,vol.2,article59,25. [4]H.Chen,S.Ding,X.Chen,L.Wang,C.Zhu,andW.Chen, Global finite-time stabilization for nonholonomic mobile robots based on visual servoing, Advanced Robotic Systems, vol., article 8, 24. [5] P. Millán,L.Orihuela,C.Vivas,andF.R.Rubio, Anoptimal control L2-gain disturbance rejection design for networked control systems, in Proceedings of the IEEE American Control Conference (ACC ),pp ,Baltimore,Md,USA,June 2. [6] M. López-Martínez, M. G. Ortega, C. Vivas, and F. R. Rubio, Nonlinear L 2 control of a laboratory helicopter with variable speed rotors, Automatica,vol.43,no.4,pp ,27. [7] M. Wang and J. Zhao, L 2 -gain analysis and control synthesis for a class of uncertain switched nonlinear systems, Acta Automatica Sinica,vol.35,no.,pp ,29. [8] B. Xiao, Q.-L. Hu, and G.-F. Ma, Adaptive L-two-gain controller for flexible spacecraft attitude tracking, Control Theory and Applications,vol.28,no.,pp. 7,2. [9] M. S. Ahmed, Neural controllers for nonlinear state feedback L2-gain control, IEE Proceedings: Control Theory and Applications,vol.47,no.3,pp ,2. [2] X. Liu and Q. Yuan, Research of permanent magnet linear synchronous motor s disturbance rejection control system of L2 gain based on port-controlled Hamilton, Micromotors, no. 4, pp.43 48,24. [2] T. I. Fossen, Marine Control Systems, Marine Cybernetics, 22.



















8 Rotating Machinery Engineering The Scientific World Journal Distributed Sensor Networks Sensors Control Science and Engineering Advances in Civil Engineering Submit your manuscripts at Electrical and Computer Engineering Robotics VLSI Design Advances in OptoElectronics Navigation and Observation Chemical Engineering Active and Passive Electronic Components Antennas and Propagation Aerospace Engineering Modelling & Simulation in Engineering Shock and Vibration Advances in Acoustics and Vibration
Design of Advanced Control Techniques for an Underwater Vehicle
 Design of Advanced Control Techniques for an Underwater Vehicle Divine Maalouf Advisors: Vincent Creuze Ahmed Chemori René Zapata 5 juillet 2012 OUTLINE I. Introduction: Problems/Challenges II. Modeling
Design of Advanced Control Techniques for an Underwater Vehicle Divine Maalouf Advisors: Vincent Creuze Ahmed Chemori René Zapata 5 juillet 2012 OUTLINE I. Introduction: Problems/Challenges II. Modeling
Research Article Partial Pole Placement in LMI Region
 Control Science and Engineering Article ID 84128 5 pages http://dxdoiorg/11155/214/84128 Research Article Partial Pole Placement in LMI Region Liuli Ou 1 Shaobo Han 2 Yongji Wang 1 Shuai Dong 1 and Lei
Control Science and Engineering Article ID 84128 5 pages http://dxdoiorg/11155/214/84128 Research Article Partial Pole Placement in LMI Region Liuli Ou 1 Shaobo Han 2 Yongji Wang 1 Shuai Dong 1 and Lei
Nonlinear Tracking Control of Underactuated Surface Vessel
 American Control Conference June -. Portland OR USA FrB. Nonlinear Tracking Control of Underactuated Surface Vessel Wenjie Dong and Yi Guo Abstract We consider in this paper the tracking control problem
American Control Conference June -. Portland OR USA FrB. Nonlinear Tracking Control of Underactuated Surface Vessel Wenjie Dong and Yi Guo Abstract We consider in this paper the tracking control problem
Research Article Sliding Mode Control for the Synchronous Generator
 ISRN Applied Mathematics Volume 014, Article ID 56504, 7 pages http://dx.doi.org/10.1155/014/56504 Research Article Sliding Mode Control for the Synchronous Generator Yaote Chang and Chih-Chin Wen Department
ISRN Applied Mathematics Volume 014, Article ID 56504, 7 pages http://dx.doi.org/10.1155/014/56504 Research Article Sliding Mode Control for the Synchronous Generator Yaote Chang and Chih-Chin Wen Department
SYNCHRONIZATION CRITERION OF CHAOTIC PERMANENT MAGNET SYNCHRONOUS MOTOR VIA OUTPUT FEEDBACK AND ITS SIMULATION
 SYNCHRONIZAION CRIERION OF CHAOIC PERMANEN MAGNE SYNCHRONOUS MOOR VIA OUPU FEEDBACK AND IS SIMULAION KALIN SU *, CHUNLAI LI College of Physics and Electronics, Hunan Institute of Science and echnology,
SYNCHRONIZAION CRIERION OF CHAOIC PERMANEN MAGNE SYNCHRONOUS MOOR VIA OUPU FEEDBACK AND IS SIMULAION KALIN SU *, CHUNLAI LI College of Physics and Electronics, Hunan Institute of Science and echnology,
A Sliding Mode Control based on Nonlinear Disturbance Observer for the Mobile Manipulator
 International Core Journal of Engineering Vol.3 No.6 7 ISSN: 44-895 A Sliding Mode Control based on Nonlinear Disturbance Observer for the Mobile Manipulator Yanna Si Information Engineering College Henan
International Core Journal of Engineering Vol.3 No.6 7 ISSN: 44-895 A Sliding Mode Control based on Nonlinear Disturbance Observer for the Mobile Manipulator Yanna Si Information Engineering College Henan
Hover Control for Helicopter Using Neural Network-Based Model Reference Adaptive Controller
 Vol.13 No.1, 217 مجلد 13 العدد 217 1 Hover Control for Helicopter Using Neural Network-Based Model Reference Adaptive Controller Abdul-Basset A. Al-Hussein Electrical Engineering Department Basrah University
Vol.13 No.1, 217 مجلد 13 العدد 217 1 Hover Control for Helicopter Using Neural Network-Based Model Reference Adaptive Controller Abdul-Basset A. Al-Hussein Electrical Engineering Department Basrah University
Underactuated Dynamic Positioning of a Ship Experimental Results
 856 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 8, NO. 5, SEPTEMBER 2000 Underactuated Dynamic Positioning of a Ship Experimental Results Kristin Y. Pettersen and Thor I. Fossen Abstract The
856 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 8, NO. 5, SEPTEMBER 2000 Underactuated Dynamic Positioning of a Ship Experimental Results Kristin Y. Pettersen and Thor I. Fossen Abstract The
UDE-based Dynamic Surface Control for Strict-feedback Systems with Mismatched Disturbances
 16 American Control Conference ACC) Boston Marriott Copley Place July 6-8, 16. Boston, MA, USA UDE-based Dynamic Surface Control for Strict-feedback Systems with Mismatched Disturbances Jiguo Dai, Beibei
16 American Control Conference ACC) Boston Marriott Copley Place July 6-8, 16. Boston, MA, USA UDE-based Dynamic Surface Control for Strict-feedback Systems with Mismatched Disturbances Jiguo Dai, Beibei
Nonlinear Observer Design for Dynamic Positioning
 Author s Name, Company Title of the Paper DYNAMIC POSITIONING CONFERENCE November 15-16, 2005 Control Systems I J.G. Snijders, J.W. van der Woude Delft University of Technology (The Netherlands) J. Westhuis
Author s Name, Company Title of the Paper DYNAMIC POSITIONING CONFERENCE November 15-16, 2005 Control Systems I J.G. Snijders, J.W. van der Woude Delft University of Technology (The Netherlands) J. Westhuis
Open Access Permanent Magnet Synchronous Motor Vector Control Based on Weighted Integral Gain of Sliding Mode Variable Structure
 Send Orders for Reprints to reprints@benthamscienceae The Open Automation and Control Systems Journal, 5, 7, 33-33 33 Open Access Permanent Magnet Synchronous Motor Vector Control Based on Weighted Integral
Send Orders for Reprints to reprints@benthamscienceae The Open Automation and Control Systems Journal, 5, 7, 33-33 33 Open Access Permanent Magnet Synchronous Motor Vector Control Based on Weighted Integral
Nonlinear Formation Control of Marine Craft
 Nonlinear Formation Control of Marine Craft Roger Skjetne, Sonja Moi, and Thor I. Fossen Abstract This paper investigates formation control of a fleet of ships. The control objective for each ship is to
Nonlinear Formation Control of Marine Craft Roger Skjetne, Sonja Moi, and Thor I. Fossen Abstract This paper investigates formation control of a fleet of ships. The control objective for each ship is to
SLIDING MODE FAULT TOLERANT CONTROL WITH PRESCRIBED PERFORMANCE. Jicheng Gao, Qikun Shen, Pengfei Yang and Jianye Gong
 International Journal of Innovative Computing, Information and Control ICIC International c 27 ISSN 349-498 Volume 3, Number 2, April 27 pp. 687 694 SLIDING MODE FAULT TOLERANT CONTROL WITH PRESCRIBED
International Journal of Innovative Computing, Information and Control ICIC International c 27 ISSN 349-498 Volume 3, Number 2, April 27 pp. 687 694 SLIDING MODE FAULT TOLERANT CONTROL WITH PRESCRIBED
Research Article Energy Reduction with Anticontrol of Chaos for Nonholonomic Mobile Robot System
 Abstract and Applied Analysis Volume 22, Article ID 8544, 4 pages doi:.55/22/8544 Research Article Energy Reduction with Anticontrol of Chaos for Nonholonomic Mobile Robot System Zahra Yaghoubi, Hassan
Abstract and Applied Analysis Volume 22, Article ID 8544, 4 pages doi:.55/22/8544 Research Article Energy Reduction with Anticontrol of Chaos for Nonholonomic Mobile Robot System Zahra Yaghoubi, Hassan
Nonlinear Controller Design of the Inverted Pendulum System based on Extended State Observer Limin Du, Fucheng Cao
 International Conference on Automation, Mechanical Control and Computational Engineering (AMCCE 015) Nonlinear Controller Design of the Inverted Pendulum System based on Extended State Observer Limin Du,
International Conference on Automation, Mechanical Control and Computational Engineering (AMCCE 015) Nonlinear Controller Design of the Inverted Pendulum System based on Extended State Observer Limin Du,
CONTROL DESIGN FOR SLOW SPEED POSITIONING
 CONTROL DESIGN FOR SLOW SPEED POSITIONING Anna Witkowska Gdansk University of Technology, Electrical and Control Engineering Department, Gdansk, Poland E-mail: awitkowska@ely.pg.gda.pl KEYWORDS Backstepping,
CONTROL DESIGN FOR SLOW SPEED POSITIONING Anna Witkowska Gdansk University of Technology, Electrical and Control Engineering Department, Gdansk, Poland E-mail: awitkowska@ely.pg.gda.pl KEYWORDS Backstepping,
Research Article Study on Zero-Doppler Centroid Control for GEO SAR Ground Observation
 Antennas and Propagation Article ID 549269 7 pages http://dx.doi.org/1.1155/214/549269 Research Article Study on Zero-Doppler Centroid Control for GEO SAR Ground Observation Yicheng Jiang Bin Hu Yun Zhang
Antennas and Propagation Article ID 549269 7 pages http://dx.doi.org/1.1155/214/549269 Research Article Study on Zero-Doppler Centroid Control for GEO SAR Ground Observation Yicheng Jiang Bin Hu Yun Zhang
Model Reference Adaptive Control of Underwater Robotic Vehicle in Plane Motion
 Proceedings of the 11th WSEAS International Conference on SSTEMS Agios ikolaos Crete Island Greece July 23-25 27 38 Model Reference Adaptive Control of Underwater Robotic Vehicle in Plane Motion j.garus@amw.gdynia.pl
Proceedings of the 11th WSEAS International Conference on SSTEMS Agios ikolaos Crete Island Greece July 23-25 27 38 Model Reference Adaptive Control of Underwater Robotic Vehicle in Plane Motion j.garus@amw.gdynia.pl
TTK4190 Guidance and Control Exam Suggested Solution Spring 2011
 TTK4190 Guidance and Control Exam Suggested Solution Spring 011 Problem 1 A) The weight and buoyancy of the vehicle can be found as follows: W = mg = 15 9.81 = 16.3 N (1) B = 106 4 ( ) 0.6 3 3 π 9.81 =
TTK4190 Guidance and Control Exam Suggested Solution Spring 011 Problem 1 A) The weight and buoyancy of the vehicle can be found as follows: W = mg = 15 9.81 = 16.3 N (1) B = 106 4 ( ) 0.6 3 3 π 9.81 =
Research Article A New Type of Magnetic Actuator Capable of Wall-Climbing Movement Using Inertia Force
 Engineering Volume 14, Article ID 93178, 6 pages http://dx.doi.org/1.1155/14/93178 Research Article A New Type of Magnetic Actuator Capable of Wall-Climbing Movement Using Inertia Force H. Yaguchi, S.
Engineering Volume 14, Article ID 93178, 6 pages http://dx.doi.org/1.1155/14/93178 Research Article A New Type of Magnetic Actuator Capable of Wall-Climbing Movement Using Inertia Force H. Yaguchi, S.
Global stabilization of an underactuated autonomous underwater vehicle via logic-based switching 1
 Proc. of CDC - 4st IEEE Conference on Decision and Control, Las Vegas, NV, December Global stabilization of an underactuated autonomous underwater vehicle via logic-based switching António Pedro Aguiar
Proc. of CDC - 4st IEEE Conference on Decision and Control, Las Vegas, NV, December Global stabilization of an underactuated autonomous underwater vehicle via logic-based switching António Pedro Aguiar
Research Article Forward and Reverse Movements of a Linear Positioning Stage Based on the Parasitic Motion Principle
 Advances in Mechanical Engineering, Article ID 45256, 7 pages http://dx.doi.org/1.1155/214/45256 Research Article Forward and Reverse Movements of a Linear Positioning Stage Based on the Parasitic Motion
Advances in Mechanical Engineering, Article ID 45256, 7 pages http://dx.doi.org/1.1155/214/45256 Research Article Forward and Reverse Movements of a Linear Positioning Stage Based on the Parasitic Motion
Research Article The Microphone Feedback Analogy for Chatter in Machining
 Shock and Vibration Volume 215, Article ID 976819, 5 pages http://dx.doi.org/1.1155/215/976819 Research Article The Microphone Feedback Analogy for Chatter in Machining Tony Schmitz UniversityofNorthCarolinaatCharlotte,Charlotte,NC28223,USA
Shock and Vibration Volume 215, Article ID 976819, 5 pages http://dx.doi.org/1.1155/215/976819 Research Article The Microphone Feedback Analogy for Chatter in Machining Tony Schmitz UniversityofNorthCarolinaatCharlotte,Charlotte,NC28223,USA
Handling Roll Constraints for Path Following of Marine Surface Vessels using Coordinated Rudder and Propulsion Control
 2010 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 30-July 02, 2010 FrB15.5 Handling Roll Constraints for Path Following of Marine Surface Vessels using Coordinated Rudder and
2010 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 30-July 02, 2010 FrB15.5 Handling Roll Constraints for Path Following of Marine Surface Vessels using Coordinated Rudder and
RBF Neural Network Adaptive Control for Space Robots without Speed Feedback Signal
 Trans. Japan Soc. Aero. Space Sci. Vol. 56, No. 6, pp. 37 3, 3 RBF Neural Network Adaptive Control for Space Robots without Speed Feedback Signal By Wenhui ZHANG, Xiaoping YE and Xiaoming JI Institute
Trans. Japan Soc. Aero. Space Sci. Vol. 56, No. 6, pp. 37 3, 3 RBF Neural Network Adaptive Control for Space Robots without Speed Feedback Signal By Wenhui ZHANG, Xiaoping YE and Xiaoming JI Institute
Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators
 Shock and Vibration, Article ID 71814, 5 pages http://dx.doi.org/1.1155/214/71814 Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators Sajad
Shock and Vibration, Article ID 71814, 5 pages http://dx.doi.org/1.1155/214/71814 Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators Sajad
Unifying Behavior-Based Control Design and Hybrid Stability Theory
 9 American Control Conference Hyatt Regency Riverfront St. Louis MO USA June - 9 ThC.6 Unifying Behavior-Based Control Design and Hybrid Stability Theory Vladimir Djapic 3 Jay Farrell 3 and Wenjie Dong
9 American Control Conference Hyatt Regency Riverfront St. Louis MO USA June - 9 ThC.6 Unifying Behavior-Based Control Design and Hybrid Stability Theory Vladimir Djapic 3 Jay Farrell 3 and Wenjie Dong
Research Article Weather Forecasting Using Sliding Window Algorithm
 ISRN Signal Processing Volume 23, Article ID 5654, 5 pages http://dx.doi.org/.55/23/5654 Research Article Weather Forecasting Using Sliding Window Algorithm Piyush Kapoor and Sarabjeet Singh Bedi 2 KvantumInc.,Gurgaon22,India
ISRN Signal Processing Volume 23, Article ID 5654, 5 pages http://dx.doi.org/.55/23/5654 Research Article Weather Forecasting Using Sliding Window Algorithm Piyush Kapoor and Sarabjeet Singh Bedi 2 KvantumInc.,Gurgaon22,India
Output Feedback Control for Maneuvering Systems Using Observer Backstepping
 Output Feedback Control for Maneuvering Systems Using Observer Backstepping Ivar-André F. Ihle 1 RogerSkjetne and Thor I. Fossen 13 Abstract An output feedback design for maneuvering systems is proposed
Output Feedback Control for Maneuvering Systems Using Observer Backstepping Ivar-André F. Ihle 1 RogerSkjetne and Thor I. Fossen 13 Abstract An output feedback design for maneuvering systems is proposed
Robust Speed Controller Design for Permanent Magnet Synchronous Motor Drives Based on Sliding Mode Control
 Available online at www.sciencedirect.com ScienceDirect Energy Procedia 88 (2016 ) 867 873 CUE2015-Applied Energy Symposium and Summit 2015: ow carbon cities and urban energy systems Robust Speed Controller
Available online at www.sciencedirect.com ScienceDirect Energy Procedia 88 (2016 ) 867 873 CUE2015-Applied Energy Symposium and Summit 2015: ow carbon cities and urban energy systems Robust Speed Controller
DESIRED COMPENSATION ADAPTIVE ROBUST CONTROL OF MOBILE SATELLITE COMMUNICATION SYSTEM WITH DISTURBANCE AND MODEL UNCERTAINTIES
 International Journal of Innovative Computing, Information and Control ICIC International c 13 ISSN 1349-4198 Volume 9, Number 1, January 13 pp. 153 164 DESIRED COMPENSATION ADAPTIVE ROBUST CONTROL OF
International Journal of Innovative Computing, Information and Control ICIC International c 13 ISSN 1349-4198 Volume 9, Number 1, January 13 pp. 153 164 DESIRED COMPENSATION ADAPTIVE ROBUST CONTROL OF
Research Article Stabilization Analysis and Synthesis of Discrete-Time Descriptor Markov Jump Systems with Partially Unknown Transition Probabilities
 Research Journal of Applied Sciences, Engineering and Technology 7(4): 728-734, 214 DOI:1.1926/rjaset.7.39 ISSN: 24-7459; e-issn: 24-7467 214 Maxwell Scientific Publication Corp. Submitted: February 25,
Research Journal of Applied Sciences, Engineering and Technology 7(4): 728-734, 214 DOI:1.1926/rjaset.7.39 ISSN: 24-7459; e-issn: 24-7467 214 Maxwell Scientific Publication Corp. Submitted: February 25,
Design of Sliding Mode Attitude Control for Communication Spacecraft
 Design of Sliding Mode Attitude Control for Communication Spacecraft Erkan Abdulhamitbilal 1 and Elbrous M. Jafarov 1 ISTAVIA Engineering, Istanbul Aeronautics and Astronautics Engineering, Istanbul Technical
Design of Sliding Mode Attitude Control for Communication Spacecraft Erkan Abdulhamitbilal 1 and Elbrous M. Jafarov 1 ISTAVIA Engineering, Istanbul Aeronautics and Astronautics Engineering, Istanbul Technical
Research Article Electromagnetic and Mechanical Characteristics Analysis of a Flat-Type Vertical-Gap Passive Magnetic Levitation Vibration Isolator
 Shock and Vibration Volume 6, Article ID 577, pages http://dx.doi.org/.55/6/577 Research Article Electromagnetic and Mechanical Characteristics Analysis of a Flat-Type Vertical-Gap Passive Magnetic Levitation
Shock and Vibration Volume 6, Article ID 577, pages http://dx.doi.org/.55/6/577 Research Article Electromagnetic and Mechanical Characteristics Analysis of a Flat-Type Vertical-Gap Passive Magnetic Levitation
Research Article Smooth Sliding Mode Control and Its Application in Ship Boiler Drum Water Level
 Mathematical Problems in Engineering Volume 216 Article ID 8516973 7 pages http://dxdoiorg/11155/216/8516973 Research Article Smooth Sliding Mode Control and Its Application in Ship Boiler Drum Water Level
Mathematical Problems in Engineering Volume 216 Article ID 8516973 7 pages http://dxdoiorg/11155/216/8516973 Research Article Smooth Sliding Mode Control and Its Application in Ship Boiler Drum Water Level
CONTROL OF ROBOT CAMERA SYSTEM WITH ACTUATOR S DYNAMICS TO TRACK MOVING OBJECT
 Journal of Computer Science and Cybernetics, V.31, N.3 (2015), 255 265 DOI: 10.15625/1813-9663/31/3/6127 CONTROL OF ROBOT CAMERA SYSTEM WITH ACTUATOR S DYNAMICS TO TRACK MOVING OBJECT NGUYEN TIEN KIEM
Journal of Computer Science and Cybernetics, V.31, N.3 (2015), 255 265 DOI: 10.15625/1813-9663/31/3/6127 CONTROL OF ROBOT CAMERA SYSTEM WITH ACTUATOR S DYNAMICS TO TRACK MOVING OBJECT NGUYEN TIEN KIEM
Trajectory tracking & Path-following control
 Cooperative Control of Multiple Robotic Vehicles: Theory and Practice Trajectory tracking & Path-following control EECI Graduate School on Control Supélec, Feb. 21-25, 2011 A word about T Tracking and
Cooperative Control of Multiple Robotic Vehicles: Theory and Practice Trajectory tracking & Path-following control EECI Graduate School on Control Supélec, Feb. 21-25, 2011 A word about T Tracking and
CHATTERING-FREE SMC WITH UNIDIRECTIONAL AUXILIARY SURFACES FOR NONLINEAR SYSTEM WITH STATE CONSTRAINTS. Jian Fu, Qing-Xian Wu and Ze-Hui Mao
 International Journal of Innovative Computing, Information and Control ICIC International c 2013 ISSN 1349-4198 Volume 9, Number 12, December 2013 pp. 4793 4809 CHATTERING-FREE SMC WITH UNIDIRECTIONAL
International Journal of Innovative Computing, Information and Control ICIC International c 2013 ISSN 1349-4198 Volume 9, Number 12, December 2013 pp. 4793 4809 CHATTERING-FREE SMC WITH UNIDIRECTIONAL
Research Article H Control Theory Using in the Air Pollution Control System
 Mathematical Problems in Engineering Volume 2013, Article ID 145396, 5 pages http://dx.doi.org/10.1155/2013/145396 Research Article H Control Theory Using in the Air Pollution Control System Tingya Yang,
Mathematical Problems in Engineering Volume 2013, Article ID 145396, 5 pages http://dx.doi.org/10.1155/2013/145396 Research Article H Control Theory Using in the Air Pollution Control System Tingya Yang,
A Novel Finite Time Sliding Mode Control for Robotic Manipulators
 Preprints of the 19th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 24-29, 214 A Novel Finite Time Sliding Mode Control for Robotic Manipulators Yao ZHAO
Preprints of the 19th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 24-29, 214 A Novel Finite Time Sliding Mode Control for Robotic Manipulators Yao ZHAO
A Model-Free Control System Based on the Sliding Mode Control Method with Applications to Multi-Input-Multi-Output Systems
 Proceedings of the 4 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'17) Toronto, Canada August 21 23, 2017 Paper No. 119 DOI: 10.11159/cdsr17.119 A Model-Free Control System
Proceedings of the 4 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'17) Toronto, Canada August 21 23, 2017 Paper No. 119 DOI: 10.11159/cdsr17.119 A Model-Free Control System
Tracking Control of a Class of Differential Inclusion Systems via Sliding Mode Technique
 International Journal of Automation and Computing (3), June 24, 38-32 DOI: 7/s633-4-793-6 Tracking Control of a Class of Differential Inclusion Systems via Sliding Mode Technique Lei-Po Liu Zhu-Mu Fu Xiao-Na
International Journal of Automation and Computing (3), June 24, 38-32 DOI: 7/s633-4-793-6 Tracking Control of a Class of Differential Inclusion Systems via Sliding Mode Technique Lei-Po Liu Zhu-Mu Fu Xiao-Na
Research Article Adaptive Control of Chaos in Chua s Circuit
 Mathematical Problems in Engineering Volume 2011, Article ID 620946, 14 pages doi:10.1155/2011/620946 Research Article Adaptive Control of Chaos in Chua s Circuit Weiping Guo and Diantong Liu Institute
Mathematical Problems in Engineering Volume 2011, Article ID 620946, 14 pages doi:10.1155/2011/620946 Research Article Adaptive Control of Chaos in Chua s Circuit Weiping Guo and Diantong Liu Institute
Simulation of Backstepping-based Nonlinear Control for Quadrotor Helicopter
 APPLICATIONS OF MODELLING AND SIMULATION http://amsjournal.ams-mss.org eissn 2680-8084 VOL 2, NO. 1, 2018, 34-40 Simulation of Backstepping-based Nonlinear Control for Quadrotor Helicopter M.A.M. Basri*,
APPLICATIONS OF MODELLING AND SIMULATION http://amsjournal.ams-mss.org eissn 2680-8084 VOL 2, NO. 1, 2018, 34-40 Simulation of Backstepping-based Nonlinear Control for Quadrotor Helicopter M.A.M. Basri*,
ADAPTIVE DESIGN OF CONTROLLER AND SYNCHRONIZER FOR LU-XIAO CHAOTIC SYSTEM
 ADAPTIVE DESIGN OF CONTROLLER AND SYNCHRONIZER FOR LU-XIAO CHAOTIC SYSTEM WITH UNKNOWN PARAMETERS Sundarapandian Vaidyanathan 1 1 Research and Development Centre, Vel Tech Dr. RR & Dr. SR Technical University
ADAPTIVE DESIGN OF CONTROLLER AND SYNCHRONIZER FOR LU-XIAO CHAOTIC SYSTEM WITH UNKNOWN PARAMETERS Sundarapandian Vaidyanathan 1 1 Research and Development Centre, Vel Tech Dr. RR & Dr. SR Technical University
Research Article Robust Switching Control Strategy for a Transmission System with Unknown Backlash
 Mathematical Problems in Engineering Volume 24, Article ID 79384, 8 pages http://dx.doi.org/.55/24/79384 Research Article Robust Switching Control Strategy for a Transmission System with Unknown Backlash
Mathematical Problems in Engineering Volume 24, Article ID 79384, 8 pages http://dx.doi.org/.55/24/79384 Research Article Robust Switching Control Strategy for a Transmission System with Unknown Backlash
Research Article Adaptive Neural Gradient Descent Control for a Class of Nonlinear Dynamic Systems with Chaotic Phenomenon
 Mathematical Problems in Engineering Volume 215, Article ID 89471, 6 pages http://dx.doi.org/1.1155/215/89471 Research Article Adaptive Neural Gradient Descent Control for a Class of Nonlinear Dynamic
Mathematical Problems in Engineering Volume 215, Article ID 89471, 6 pages http://dx.doi.org/1.1155/215/89471 Research Article Adaptive Neural Gradient Descent Control for a Class of Nonlinear Dynamic
Design of a Heading Autopilot for Mariner Class Ship with Wave Filtering Based on Passive Observer
 Design of a Heading Autopilot for Mariner Class Ship with Wave Filtering Based on Passive Observer 1 Mridul Pande, K K Mangrulkar 1, Aerospace Engg Dept DIAT (DU), Pune Email: 1 mridul_pande000@yahoo.com
Design of a Heading Autopilot for Mariner Class Ship with Wave Filtering Based on Passive Observer 1 Mridul Pande, K K Mangrulkar 1, Aerospace Engg Dept DIAT (DU), Pune Email: 1 mridul_pande000@yahoo.com
Research Article Convex Polyhedron Method to Stability of Continuous Systems with Two Additive Time-Varying Delay Components
 Applied Mathematics Volume 202, Article ID 689820, 3 pages doi:0.55/202/689820 Research Article Convex Polyhedron Method to Stability of Continuous Systems with Two Additive Time-Varying Delay Components
Applied Mathematics Volume 202, Article ID 689820, 3 pages doi:0.55/202/689820 Research Article Convex Polyhedron Method to Stability of Continuous Systems with Two Additive Time-Varying Delay Components
Position in the xy plane y position x position
 Robust Control of an Underactuated Surface Vessel with Thruster Dynamics K. Y. Pettersen and O. Egeland Department of Engineering Cybernetics Norwegian Uniersity of Science and Technology N- Trondheim,
Robust Control of an Underactuated Surface Vessel with Thruster Dynamics K. Y. Pettersen and O. Egeland Department of Engineering Cybernetics Norwegian Uniersity of Science and Technology N- Trondheim,
Problem 1: Ship Path-Following Control System (35%)
") Problem 1: Ship Path-Following Control System (35%) Consider the kinematic equations: Figure 1: NTNU s research vessel, R/V Gunnerus, and Nomoto model: T ṙ + r = Kδ (1) with T = 22.0 s and K = 0.1 s 1.
Problem 1: Ship Path-Following Control System (35%) Consider the kinematic equations: Figure 1: NTNU s research vessel, R/V Gunnerus, and Nomoto model: T ṙ + r = Kδ (1) with T = 22.0 s and K = 0.1 s 1.
NONLINEAR PATH CONTROL FOR A DIFFERENTIAL DRIVE MOBILE ROBOT
 NONLINEAR PATH CONTROL FOR A DIFFERENTIAL DRIVE MOBILE ROBOT Plamen PETROV Lubomir DIMITROV Technical University of Sofia Bulgaria Abstract. A nonlinear feedback path controller for a differential drive
NONLINEAR PATH CONTROL FOR A DIFFERENTIAL DRIVE MOBILE ROBOT Plamen PETROV Lubomir DIMITROV Technical University of Sofia Bulgaria Abstract. A nonlinear feedback path controller for a differential drive
Research Article Two Mathematical Models for Generation of Crowned Tooth Surface
 e Scientific World Journal, Article ID 6409, 6 pages http://dx.doi.org/0.55/204/6409 Research Article Two Mathematical Models for Generation of Crowned Tooth Surface Laszlo Kelemen and Jozsef Szente University
e Scientific World Journal, Article ID 6409, 6 pages http://dx.doi.org/0.55/204/6409 Research Article Two Mathematical Models for Generation of Crowned Tooth Surface Laszlo Kelemen and Jozsef Szente University
FINITE TIME CONTROL OF NONLINEAR PERMANENT MAGNET SYNCHRONOUS MOTOR
 U.P.B. Sci. Bull., Series C, Vol. 79, Iss., 7 ISSN 86-354 FINIE IME CONROL OF NONLINEAR PERMANEN MAGNE SYNCHRONOUS MOOR Wei DONG, Bin WANG *, Yan LONG 3, Delan ZHU 4, Shikun SUN 5 he finite time control
U.P.B. Sci. Bull., Series C, Vol. 79, Iss., 7 ISSN 86-354 FINIE IME CONROL OF NONLINEAR PERMANEN MAGNE SYNCHRONOUS MOOR Wei DONG, Bin WANG *, Yan LONG 3, Delan ZHU 4, Shikun SUN 5 he finite time control
TRACKING CONTROL VIA ROBUST DYNAMIC SURFACE CONTROL FOR HYPERSONIC VEHICLES WITH INPUT SATURATION AND MISMATCHED UNCERTAINTIES
 International Journal of Innovative Computing, Information and Control ICIC International c 017 ISSN 1349-4198 Volume 13, Number 6, December 017 pp. 067 087 TRACKING CONTROL VIA ROBUST DYNAMIC SURFACE
International Journal of Innovative Computing, Information and Control ICIC International c 017 ISSN 1349-4198 Volume 13, Number 6, December 017 pp. 067 087 TRACKING CONTROL VIA ROBUST DYNAMIC SURFACE
Copyrighted Material. 1.1 Large-Scale Interconnected Dynamical Systems
 Chapter One Introduction 1.1 Large-Scale Interconnected Dynamical Systems Modern complex dynamical systems 1 are highly interconnected and mutually interdependent, both physically and through a multitude
Chapter One Introduction 1.1 Large-Scale Interconnected Dynamical Systems Modern complex dynamical systems 1 are highly interconnected and mutually interdependent, both physically and through a multitude
Formation Control for Underactuated Autonomous Underwater Vehicles Using the Approach Angle
 Original Article International Journal of Fuzzy Logic and Intelligent Systems Vol. 3, No. 3, September 03, pp. 54-63 http://dx.doi.org/0.539/ijfis.03.3.3.54 ISSNPrint 598-645 ISSNOnline 093-744X Formation
Original Article International Journal of Fuzzy Logic and Intelligent Systems Vol. 3, No. 3, September 03, pp. 54-63 http://dx.doi.org/0.539/ijfis.03.3.3.54 ISSNPrint 598-645 ISSNOnline 093-744X Formation
1. INTRODUCTION. Fig. 1 SAUVIM
 Automatic Fault-Accommodating Thrust Redistribution for a Redundant AUV Aaron M. Hanai *, Giacomo Marani* 2, Song K. Choi* 2 * Marine Autonomous Systems Engineering, Inc. 2333 Kapiolani Blvd. #92, Honolulu,
Automatic Fault-Accommodating Thrust Redistribution for a Redundant AUV Aaron M. Hanai *, Giacomo Marani* 2, Song K. Choi* 2 * Marine Autonomous Systems Engineering, Inc. 2333 Kapiolani Blvd. #92, Honolulu,
Final Exam TTK 4190 Guidance and Control
 Page 1 of 8 Contact person during the exam: University lecturer Morten Breivik, Department of Engineering Cybernetics, Gløshaugen Phone: 73 5(9 43 62) Cell: 41 52 58 81 Final Exam TTK 4190 Guidance and
Page 1 of 8 Contact person during the exam: University lecturer Morten Breivik, Department of Engineering Cybernetics, Gløshaugen Phone: 73 5(9 43 62) Cell: 41 52 58 81 Final Exam TTK 4190 Guidance and
Passivity-based Control of Euler-Lagrange Systems
 Romeo Ortega, Antonio Loria, Per Johan Nicklasson and Hebertt Sira-Ramfrez Passivity-based Control of Euler-Lagrange Systems Mechanical, Electrical and Electromechanical Applications Springer Contents
Romeo Ortega, Antonio Loria, Per Johan Nicklasson and Hebertt Sira-Ramfrez Passivity-based Control of Euler-Lagrange Systems Mechanical, Electrical and Electromechanical Applications Springer Contents
OVER THE past 20 years, the control of mobile robots has
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 18, NO. 5, SEPTEMBER 2010 1199 A Simple Adaptive Control Approach for Trajectory Tracking of Electrically Driven Nonholonomic Mobile Robots Bong Seok
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 18, NO. 5, SEPTEMBER 2010 1199 A Simple Adaptive Control Approach for Trajectory Tracking of Electrically Driven Nonholonomic Mobile Robots Bong Seok
Geometric Formation Control for Autonomous Underwater Vehicles
 010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 010, Anchorage, Alaska, USA Geometric Formation Control for Autonomous Underwater Vehicles Huizhen Yang
010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 010, Anchorage, Alaska, USA Geometric Formation Control for Autonomous Underwater Vehicles Huizhen Yang
Adaptive Nonlinear Control A Tutorial. Miroslav Krstić
 Adaptive Nonlinear Control A Tutorial Miroslav Krstić University of California, San Diego Backstepping Tuning Functions Design Modular Design Output Feedback Extensions A Stochastic Example Applications
Adaptive Nonlinear Control A Tutorial Miroslav Krstić University of California, San Diego Backstepping Tuning Functions Design Modular Design Output Feedback Extensions A Stochastic Example Applications
Research Article SGC Tests for Influence of Material Composition on Compaction Characteristic of Asphalt Mixtures
 The Scientific World Journal Volume 2013, Article ID 735640, 10 pages http://dx.doi.org/10.1155/2013/735640 Research Article SGC Tests for Influence of Material Composition on Compaction Characteristic
The Scientific World Journal Volume 2013, Article ID 735640, 10 pages http://dx.doi.org/10.1155/2013/735640 Research Article SGC Tests for Influence of Material Composition on Compaction Characteristic
Research Article Thermal Analysis of Air-Core Power Reactors
 ISRN Mechanical Engineering Volume 213, Article ID 86515, 6 pages http://dx.doi.org/1.1155/213/86515 Research Article Thermal Analysis of Air-Core Power Reactors Zhao Yuan, Jun-jia He, Yuan Pan, Xiao-gen
ISRN Mechanical Engineering Volume 213, Article ID 86515, 6 pages http://dx.doi.org/1.1155/213/86515 Research Article Thermal Analysis of Air-Core Power Reactors Zhao Yuan, Jun-jia He, Yuan Pan, Xiao-gen
Research Article On the Security of a Novel Probabilistic Signature Based on Bilinear Square Diffie-Hellman Problem and Its Extension
 e Scientific World Journal, Article ID 345686, 4 pages http://dx.doi.org/10.1155/2014/345686 Research Article On the Security of a Novel Probabilistic Signature Based on Bilinear Square Diffie-Hellman
e Scientific World Journal, Article ID 345686, 4 pages http://dx.doi.org/10.1155/2014/345686 Research Article On the Security of a Novel Probabilistic Signature Based on Bilinear Square Diffie-Hellman
Research Article Propagation Characteristics of Oblique Incident Terahertz Wave in Nonuniform Dusty Plasma
 Antennas and Propagation Volume 216, Article ID 945473, 6 pages http://dx.doi.org/1.1155/216/945473 Research Article Propagation Characteristics of Oblique Incident Terahert Wave in Nonuniform Dusty Plasma
Antennas and Propagation Volume 216, Article ID 945473, 6 pages http://dx.doi.org/1.1155/216/945473 Research Article Propagation Characteristics of Oblique Incident Terahert Wave in Nonuniform Dusty Plasma
Research Article Simplified Robotics Joint-Space Trajectory Generation with a via Point Using a Single Polynomial
 Robotics Volume, Article ID 75958, 6 pages http://dx.doi.org/.55//75958 Research Article Simplified Robotics Joint-Space Trajectory Generation with a via Point Using a Single Polynomial Robert L. Williams
Robotics Volume, Article ID 75958, 6 pages http://dx.doi.org/.55//75958 Research Article Simplified Robotics Joint-Space Trajectory Generation with a via Point Using a Single Polynomial Robert L. Williams
Research Article Relative Status Determination for Spacecraft Relative Motion Based on Dual Quaternion
 Mathematical Prolems in Engineering Volume 214, Article ID 62724, 7 pages http://dx.doi.org/1.1155/214/62724 Research Article Relative Status Determination for Spacecraft Relative Motion Based on Dual
Mathematical Prolems in Engineering Volume 214, Article ID 62724, 7 pages http://dx.doi.org/1.1155/214/62724 Research Article Relative Status Determination for Spacecraft Relative Motion Based on Dual
Research Article Influence of the Parameterization in the Interval Solution of Elastic Beams
 Structures Volume 04, Article ID 3953, 5 pages http://dx.doi.org/0.55/04/3953 Research Article Influence of the Parameterization in the Interval Solution of Elastic Beams Stefano Gabriele and Valerio Varano
Structures Volume 04, Article ID 3953, 5 pages http://dx.doi.org/0.55/04/3953 Research Article Influence of the Parameterization in the Interval Solution of Elastic Beams Stefano Gabriele and Valerio Varano
Research Article Shorter Path Design and Control for an Underactuated Satellite
 Hindawi International Journal of Aerospace Engineering Volume 27 Article ID 8536732 9 pages https://doi.org/.55/27/8536732 Research Article Shorter Path Design and Control for an Underactuated Satellite
Hindawi International Journal of Aerospace Engineering Volume 27 Article ID 8536732 9 pages https://doi.org/.55/27/8536732 Research Article Shorter Path Design and Control for an Underactuated Satellite
THRUST OPTIMIZATION OF AN UNDERWATER VEHICLE S PROPULSION SYSTEM
 THRUST OPTIMIZATION OF AN UNDERWATER VEHICLE S PROPULSION SYSTEM Senior lecturer Vasile DOBREF Lecturer Octavian TARABUTA Mircea cel Batran Naval Academy, Constanta, Romania Keywords: underwater vehicle,
THRUST OPTIMIZATION OF AN UNDERWATER VEHICLE S PROPULSION SYSTEM Senior lecturer Vasile DOBREF Lecturer Octavian TARABUTA Mircea cel Batran Naval Academy, Constanta, Romania Keywords: underwater vehicle,
Research Article The Application of Baum-Welch Algorithm in Multistep Attack
 e Scientific World Journal, Article ID 374260, 7 pages http://dx.doi.org/10.1155/2014/374260 Research Article The Application of Baum-Welch Algorithm in Multistep Attack Yanxue Zhang, 1 Dongmei Zhao, 2
e Scientific World Journal, Article ID 374260, 7 pages http://dx.doi.org/10.1155/2014/374260 Research Article The Application of Baum-Welch Algorithm in Multistep Attack Yanxue Zhang, 1 Dongmei Zhao, 2
Path Following for Marine Surface Vessels with Rudder and Roll Constraints: an MPC Approach
 2009 American Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June 10-12, 2009 ThC11.6 Path Following for Marine Surface Vessels with Rudder and Roll Constraints: an MPC Approach Zhen Li,
2009 American Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June 10-12, 2009 ThC11.6 Path Following for Marine Surface Vessels with Rudder and Roll Constraints: an MPC Approach Zhen Li,
Autonomous Helicopter Landing A Nonlinear Output Regulation Perspective
 Autonomous Helicopter Landing A Nonlinear Output Regulation Perspective Andrea Serrani Department of Electrical and Computer Engineering Collaborative Center for Control Sciences The Ohio State University
Autonomous Helicopter Landing A Nonlinear Output Regulation Perspective Andrea Serrani Department of Electrical and Computer Engineering Collaborative Center for Control Sciences The Ohio State University
Fuzzy Adaptive Control for Trajectory Tracking of Autonomous Underwater Vehicle
 1392 - - - Fuzzy Adaptive Control for Trajectory Tracking of Autonomous Underwater Vehicle Saeed Nakhkoob (1) - Abbas Chatraei (2) - Khoshnam Shojaei (2) (1) MSc Department of Electrical Engineering, Islamic
1392 - - - Fuzzy Adaptive Control for Trajectory Tracking of Autonomous Underwater Vehicle Saeed Nakhkoob (1) - Abbas Chatraei (2) - Khoshnam Shojaei (2) (1) MSc Department of Electrical Engineering, Islamic
Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
Chaos suppression of uncertain gyros in a given finite time
 Chin. Phys. B Vol. 1, No. 11 1 1155 Chaos suppression of uncertain gyros in a given finite time Mohammad Pourmahmood Aghababa a and Hasan Pourmahmood Aghababa bc a Electrical Engineering Department, Urmia
Chin. Phys. B Vol. 1, No. 11 1 1155 Chaos suppression of uncertain gyros in a given finite time Mohammad Pourmahmood Aghababa a and Hasan Pourmahmood Aghababa bc a Electrical Engineering Department, Urmia
Decentralized Formation Control of Multiple Autonomous Underwater Vehicles with Input Saturation Using RISE Feedback Method
 Decentralized Formation Control of Multiple Autonomous Underwater Vehicles with Input Saturation Using RISE Feedback Method Dong Cui 1,2, Brendan Englot 2, Rongxin Cui 1 and Demin Xu 1 Abstract Decentralized
Decentralized Formation Control of Multiple Autonomous Underwater Vehicles with Input Saturation Using RISE Feedback Method Dong Cui 1,2, Brendan Englot 2, Rongxin Cui 1 and Demin Xu 1 Abstract Decentralized
Dynamic backstepping control for pure-feedback nonlinear systems
 Dynamic backstepping control for pure-feedback nonlinear systems ZHANG Sheng *, QIAN Wei-qi (7.6) Computational Aerodynamics Institution, China Aerodynamics Research and Development Center, Mianyang, 6,
Dynamic backstepping control for pure-feedback nonlinear systems ZHANG Sheng *, QIAN Wei-qi (7.6) Computational Aerodynamics Institution, China Aerodynamics Research and Development Center, Mianyang, 6,
Delay-dependent Stability Analysis for Markovian Jump Systems with Interval Time-varying-delays
 International Journal of Automation and Computing 7(2), May 2010, 224-229 DOI: 10.1007/s11633-010-0224-2 Delay-dependent Stability Analysis for Markovian Jump Systems with Interval Time-varying-delays
International Journal of Automation and Computing 7(2), May 2010, 224-229 DOI: 10.1007/s11633-010-0224-2 Delay-dependent Stability Analysis for Markovian Jump Systems with Interval Time-varying-delays
Aerial Robotics. Vision-based control for Vertical Take-Off and Landing UAVs. Toulouse, October, 2 nd, Henry de Plinval (Onera - DCSD)
") Aerial Robotics Vision-based control for Vertical Take-Off and Landing UAVs Toulouse, October, 2 nd, 2014 Henry de Plinval (Onera - DCSD) collaborations with P. Morin (UPMC-ISIR), P. Mouyon (Onera), T.
Aerial Robotics Vision-based control for Vertical Take-Off and Landing UAVs Toulouse, October, 2 nd, 2014 Henry de Plinval (Onera - DCSD) collaborations with P. Morin (UPMC-ISIR), P. Mouyon (Onera), T.
Robust Control of Cooperative Underactuated Manipulators
 Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
Research Article Travel-Time Difference Extracting in Experimental Study of Rayleigh Wave Acoustoelastic Effect
 ISRN Mechanical Engineering, Article ID 3492, 7 pages http://dx.doi.org/.55/24/3492 Research Article Travel-Time Difference Extracting in Experimental Study of Rayleigh Wave Acoustoelastic Effect Hu Eryi
ISRN Mechanical Engineering, Article ID 3492, 7 pages http://dx.doi.org/.55/24/3492 Research Article Travel-Time Difference Extracting in Experimental Study of Rayleigh Wave Acoustoelastic Effect Hu Eryi
TTK4150 Nonlinear Control Systems Solution 6 Part 2
 TTK4150 Nonlinear Control Systems Solution 6 Part 2 Department of Engineering Cybernetics Norwegian University of Science and Technology Fall 2003 Solution 1 Thesystemisgivenby φ = R (φ) ω and J 1 ω 1
TTK4150 Nonlinear Control Systems Solution 6 Part 2 Department of Engineering Cybernetics Norwegian University of Science and Technology Fall 2003 Solution 1 Thesystemisgivenby φ = R (φ) ω and J 1 ω 1
Anti-synchronization of a new hyperchaotic system via small-gain theorem
 Anti-synchronization of a new hyperchaotic system via small-gain theorem Xiao Jian( ) College of Mathematics and Statistics, Chongqing University, Chongqing 400044, China (Received 8 February 2010; revised
Anti-synchronization of a new hyperchaotic system via small-gain theorem Xiao Jian( ) College of Mathematics and Statistics, Chongqing University, Chongqing 400044, China (Received 8 February 2010; revised
TERMINAL ATTITUDE-CONSTRAINED GUIDANCE AND CONTROL FOR LUNAR SOFT LANDING
 IAA-AAS-DyCoSS2-14 -02-05 TERMINAL ATTITUDE-CONSTRAINED GUIDANCE AND CONTROL FOR LUNAR SOFT LANDING Zheng-Yu Song, Dang-Jun Zhao, and Xin-Guang Lv This work concentrates on a 3-dimensional guidance and
IAA-AAS-DyCoSS2-14 -02-05 TERMINAL ATTITUDE-CONSTRAINED GUIDANCE AND CONTROL FOR LUNAR SOFT LANDING Zheng-Yu Song, Dang-Jun Zhao, and Xin-Guang Lv This work concentrates on a 3-dimensional guidance and
Control of the MARES Autonomous Underwater Vehicle
 Control of the MARES Autonomous Underwater Vehicle Bruno Ferreira, Miguel Pinto, Aníbal Matos, Nuno Cruz FEUP DEEC Rua Dr. Roberto Frias, s/n 4200-465 Porto PORTUGAL ee04018@fe.up.pt, ee04134@fe.up.pt,
Control of the MARES Autonomous Underwater Vehicle Bruno Ferreira, Miguel Pinto, Aníbal Matos, Nuno Cruz FEUP DEEC Rua Dr. Roberto Frias, s/n 4200-465 Porto PORTUGAL ee04018@fe.up.pt, ee04134@fe.up.pt,
A Backstepping control strategy for constrained tendon driven robotic finger
 A Backstepping control strategy for constrained tendon driven robotic finger Kunal Sanjay Narkhede 1, Aashay Anil Bhise 2, IA Sainul 3, Sankha Deb 4 1,2,4 Department of Mechanical Engineering, 3 Advanced
A Backstepping control strategy for constrained tendon driven robotic finger Kunal Sanjay Narkhede 1, Aashay Anil Bhise 2, IA Sainul 3, Sankha Deb 4 1,2,4 Department of Mechanical Engineering, 3 Advanced
Research Article An Optimized Grey GM(2,1) Model and Forecasting of Highway Subgrade Settlement
 Model and Forecasting of Highway Subgrade Settlement") Mathematical Problems in Engineering Volume 015, Article ID 606707, 6 pages http://dx.doi.org/10.1155/015/606707 Research Article An Optimized Grey GM(,1) Model and Forecasting of Highway Subgrade Settlement
Mathematical Problems in Engineering Volume 015, Article ID 606707, 6 pages http://dx.doi.org/10.1155/015/606707 Research Article An Optimized Grey GM(,1) Model and Forecasting of Highway Subgrade Settlement
QUATERNION FEEDBACK ATTITUDE CONTROL DESIGN: A NONLINEAR H APPROACH
 Asian Journal of Control, Vol. 5, No. 3, pp. 406-4, September 003 406 Brief Paper QUAERNION FEEDBACK AIUDE CONROL DESIGN: A NONLINEAR H APPROACH Long-Life Show, Jyh-Ching Juang, Ying-Wen Jan, and Chen-zung
Asian Journal of Control, Vol. 5, No. 3, pp. 406-4, September 003 406 Brief Paper QUAERNION FEEDBACK AIUDE CONROL DESIGN: A NONLINEAR H APPROACH Long-Life Show, Jyh-Ching Juang, Ying-Wen Jan, and Chen-zung
Research Article Mean Square Stability of Impulsive Stochastic Differential Systems
 International Differential Equations Volume 011, Article ID 613695, 13 pages doi:10.1155/011/613695 Research Article Mean Square Stability of Impulsive Stochastic Differential Systems Shujie Yang, Bao
International Differential Equations Volume 011, Article ID 613695, 13 pages doi:10.1155/011/613695 Research Article Mean Square Stability of Impulsive Stochastic Differential Systems Shujie Yang, Bao
Research Letter An Algorithm to Generate Representations of System Identification Errors
 Research Letters in Signal Processing Volume 008, Article ID 5991, 4 pages doi:10.1155/008/5991 Research Letter An Algorithm to Generate Representations of System Identification Errors Wancheng Zhang and
Research Letters in Signal Processing Volume 008, Article ID 5991, 4 pages doi:10.1155/008/5991 Research Letter An Algorithm to Generate Representations of System Identification Errors Wancheng Zhang and
ONE of the challenges in the design of attitude control
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY 1 Adaptive Sliding Mode Fault Tolerant Attitude Tracking Control for Flexible Spacecraft Under Actuator Saturation Bing Xiao, Qinglei Hu, Member, IEEE, YouminZhang,
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY 1 Adaptive Sliding Mode Fault Tolerant Attitude Tracking Control for Flexible Spacecraft Under Actuator Saturation Bing Xiao, Qinglei Hu, Member, IEEE, YouminZhang,
An Improved Nonlinear Speed Controller for Series DC Motors
 Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul, Korea, July 6-11, 8 An Improved Nonlinear Speed Controller for Series DC Motors Dongbo Zhao Ning Zhang Department
Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul, Korea, July 6-11, 8 An Improved Nonlinear Speed Controller for Series DC Motors Dongbo Zhao Ning Zhang Department
DESIGN OF A HYBRID POWER/TORQUE THRUSTER CONTROLLER WITH LOSS ESTIMATION. Øyvind N. Smogeli, Asgeir J. Sørensen and Thor I. Fossen
 DESIGN OF A HYBRID POWER/TORQUE THRUSTER CONTROLLER WITH LOSS ESTIMATION Øyvind N. Smogeli, Asgeir J. Sørensen and Thor I. Fossen Department of Marine Technology Norwegian University of Science and Technology
DESIGN OF A HYBRID POWER/TORQUE THRUSTER CONTROLLER WITH LOSS ESTIMATION Øyvind N. Smogeli, Asgeir J. Sørensen and Thor I. Fossen Department of Marine Technology Norwegian University of Science and Technology
Research Article Combination of Two Nonlinear Techniques Applied to a 3-DOF Helicopter
 ISRN Aerospace Engineering, Article ID 4367, 8 pages http://dx.doi.org/.55/4/4367 Research Article Combination of Two Nonlinear Techniques Applied to a 3-DOF Helicopter P. Ahmadi, M. Golestani, S. Nasrollahi,
ISRN Aerospace Engineering, Article ID 4367, 8 pages http://dx.doi.org/.55/4/4367 Research Article Combination of Two Nonlinear Techniques Applied to a 3-DOF Helicopter P. Ahmadi, M. Golestani, S. Nasrollahi,
THE nonholonomic systems, that is Lagrange systems
 Finite-Time Control Design for Nonholonomic Mobile Robots Subject to Spatial Constraint Yanling Shang, Jiacai Huang, Hongsheng Li and Xiulan Wen Abstract This paper studies the problem of finite-time stabilizing
Finite-Time Control Design for Nonholonomic Mobile Robots Subject to Spatial Constraint Yanling Shang, Jiacai Huang, Hongsheng Li and Xiulan Wen Abstract This paper studies the problem of finite-time stabilizing
Research Article On the Dynamics of the Furuta Pendulum
 Control Science and Engineering Volume, Article ID 583, 8 pages doi:.55//583 Research Article On the Dynamics of the Furuta Pendulum Benjamin Seth Cazzolato and Zebb Prime School of Mechanical Engineering,
Control Science and Engineering Volume, Article ID 583, 8 pages doi:.55//583 Research Article On the Dynamics of the Furuta Pendulum Benjamin Seth Cazzolato and Zebb Prime School of Mechanical Engineering,
Research Article Robust Adaptive Attitude Control for Airbreathing Hypersonic Vehicle with Attitude Constraints and Propulsive Disturbance
 Mathematical Problems in Engineering Volume 215 Article ID 29348 11 pages http://dx.doi.org/1.1155/215/29348 Research Article Robust Adaptive Attitude Control for Airbreathing Hypersonic Vehicle with Attitude
Mathematical Problems in Engineering Volume 215 Article ID 29348 11 pages http://dx.doi.org/1.1155/215/29348 Research Article Robust Adaptive Attitude Control for Airbreathing Hypersonic Vehicle with Attitude