Research Article Partial Pole Placement in LMI Region
|
|
|
- Osborne Rich
- 5 years ago
- Views:
Transcription
1 Control Science and Engineering Article ID pages Research Article Partial Pole Placement in LMI Region Liuli Ou 1 Shaobo Han 2 Yongji Wang 1 Shuai Dong 1 and Lei Liu 1 1 Key Lab of Ministry of Education for Image Processing & Intelligent Control School of Automation Huazhong University of Science and Technology Wuhan 4374 China 2 College of Electronic Science & Engineering Jilin University Changchun 1312 China Correspondence should be addressed to Lei Liu; leiliuchn@gmailcom Received 21 August 214; Accepted 29 October 214; Published 16 November 214 Academic Editor: Petko Petkov Copyright 214 Liuli Ou et al This is an open access article distributed under the Creative Commons Attribution License which permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited A new approach for pole placement of single-input system is proposed in this paper Noncritical closed loop poles can be placed arbitrarily in a specified convex region when dominant poles are fixed in anticipant locations The convex region is expressed in the form of linear matrix inequality (LMI) with which the partial pole placement problem can be solved via convex optimization tools The validity and applicability of this approach are illustrated by two examples 1 Introduction In classic control theory and application pole placement (PP) of linear system is a well-known method to reach some desired transient performances [1] in terms of settling time overshooting and damping ratio Indeed the shape of the transient response strongly depends on the locations of the closed loop poles in complex plane A strict PP is always achievable by a state feedback control law if the system is controllable PP can be performed in a transfer function or state-space context through a classical eigenvalue assignment basedoncharacteristicpolynomialoftheclosedloopsystem However when the system suffers uncertainties strict PP in desirable locations is no longer suitable For this reason nonstrict placement in a subregion of the complex plane such as a sector or a disc is developed A slight migration of the closed loop poles around desirable location may not induce a strong modification of the transient response so the robust performance of the system can be assured Chilali et al proposed a linear matrix inequality (LMI) region [2 3] which is convenient to depict typical convex subregion symmetric about real axis With it the robust controller is easy to design via solving some LMI [4] problems The LMI region was expanded to quadratic matric inequality (QMI) region by Peaucelle et al [5] and controller design for system suffering to different uncertainties was studied [6 7] Henrion et al researched PP in QMI region with respect to polynomial system [8 1] Maamri et al [11 13]proposedanovelstrategy with respect to PP in nonconnected QMI regions while Yang placed poles in union of disjointed circular regions [14] Partialpoleplacementbyfullstatefeedbackisanew strategy for single-input linear system proposed by Datta et al [15 16] n mcriticalclosed loop poles of an nth order singleinput linear system are placed at prespecified locations in the complex plane while the remaining m noncritical poles can be placed arbitrarily inside a QMI region defined by a 2 2 real symmetric matrix These noncritical poles are optimized withminimumnormoffeedbackgaink as the object The QMI region constraint is reduced to an LMI with respect to k However it is worth noting that the derivation of the LMI conditions involves the inner approximation of the nonconvex polynomial stability region [8 1] This may introduce conservatism more or less In order to reduce the conservatism we derive a new sufficient condition of region constraint at first Then an iterative strategy is proposed to solve the nonlinear optimal problem ofpartialpoleplacementbasedonthenewsufficientcondition This can produce a better result than the method in [16] This paper is organized as follows In the next section the partial pole placement problem is described Then the new method is given in Section 3InSection 4 two systems poles are placed with the new method Finally Section 5 is conclusion Notation is standard The transpose and complex conjugate transpose of matrix A are respectively denoted by A and A For symmetric matrices A and B A >( )B denotes
2 2 Control Science and Engineering that A B is positive (semi)definite is the Kronecker product of two matrices and its operation involves as The characteristic equation of system (3) can be written (A B)(C D) = (AC) (BD) (A + B) C = A C + B C (A B) = A B (1) σ (s) =s n +σ n 1 s n 1 + σ 1 s+σ = det (si n A + bk) = n i=1 (s μ i ) (7) 2 Problem Formulation A linear single-input system with full state feedback control canbewrittenas x = Ax + bu; u = kx (2) x R n 1 u R A R n n b R n 1 andk := [k 1 k 2 k n ] R 1 n Providedthatthepair(A b) is controllable all the poles {μ 1 μ 2 μ n } of the closed loop system x = (A bk) x (3) can be placed at any arbitrary locations of the complex plane viaauniquechoiceofk Different from strict PP partial pole placement only assigns n mcritical poles {μ m+1 μ m+2 μ n } at {λ 1 λ 2 λ n m } as the dominant poles to obtain desirable transient response And the rest m poles {μ 1 μ 2 μ m } can be placed in some LMI region R LMI of the complex plane Definition 1 (see [2]) R LMI is defined as R LMI ={z C : R 11 + R 12 z+r 12 z <} (4) R 11 = R 11 Rd d and R 12 R d d andtheycanbe written in the form of partitioned matrix: R =[ R 11 R 12 R ] (5) 12 Many convex regions symmetric about the real axis can be depicted according to definition (4) For example when R are chosen as R =[ 1 1 ] or R = [ [ [ [ ] (6) ] the LMI regions are respectively the left-hand side of complex plane (stable region for continuous systems) and the unitary disk with centre at the origin (stable region for discrete systems) m =[ (s μ i )] (s λ i )] i=1 i=1 α(s) n m [ β(s) α (s) =s m +α m 1 s m 1 + α 1 s+α β (s) =s n m +β n m 1 s n m 1 + β 1 s+β α(s) is a monic polynomial of unknown coefficients while β(s) is a monic polynomial of known coefficients that are determined by poles {λ 1 λ 2 λ n m } Let a(s) betheopenloopcharacteristicpolynomialof system (2): a (s) = det (si n A) =s n +a n 1 s n 1 + a 1 s+a andthenwecandefine â := [a a 1 a n 1 ] σ := [σ σ 1 σ n 1 ] α := [α α 1 α m 1 ] β := [β β 1 β n m 1 ] As we know [16] when β(s) is known (8) (9) (1) k =[conv ([ α 1][ β 1]) [â 1]] [ (CA ) 1 ] (11) a 1 a 2 a n 1 1 a 2 a 3 1 A = d [ a n 1 1 ] [ 1 ] C =[b Ab A 2 b A n 1 b] Our main object can be summarized as follows Question 1 Find a k that satisfies min kk st (1) k satisfies (11) ; (2) μ i R LMI i=12m (12) (13)
3 Control Science and Engineering 3 The optimal objective of Question 1 is to minimize the norm of the feedback gain vector which means lowest control efforts 3 Main Result Before stating the main result we first recall an important lemma Definition 2 (see [2]) A matrix A R n n is R LMI -stable if and only if all its eigenvalues lie in the R LMI region defined by (4) Lemma 3 (see [5]) A R n n is R LMI -stable if and only if thereexistsasymmetricpositivedefinitematrixp R n n such that R 11 P + R 12 (PA) + R 12 (A P)< (14) InthesamewayasDefinition 2 we can define R LMI - stability with respect to polynomial α(s) and then derive corresponding theorem Definition 4 α(s) (or α)isr LMI -stable if and only if all roots of α(s) = lie in the R LMI region defined by (4) Theorem 5 α(s) (or α)isr LMI -stable if and only if there exists a symmetric positive definite matrix P R n n such that R 11 P + R 12 (PE )+R 12 (EP) < (15) 1 1 E = d (16) [ 1 ] [ a a 1 a 2 a m 1 ] Proof Because det(si m E )=α(s)alleigenvaluesofe are also roots of α(s) = The conclusion can be easily obtained Theorem 6 If there exists Y R 1 m and a symmetric positive definite matrix X R m m such that R 11 X + R 12 (XF + Y b ) +R 12 (FX + b Y) < (17) 1 1 F = d b = (18) [ 1] [ ] [ ] [ 1] then ξ = YX 1 is R LMI -stable Proof Taking Y = ξx condition (17) is reduced to Theorem 6 Considering Theorem 6 Question 1 can be written as follows Question 2 Find a symmetric positive definite matrix X and a matrixy that satisfies min kk st (1) k satisfies (11) ; (2) α = YX 1 ; (3) X Y satisfy LMI (17) (19) However Question 2 is a nonlinear matrix equality problem We need to translate it into two LMI problems and solve them iteratively Question 3 When α is known find a feasible symmetric positive definite matrix X α that satisfies (15) Question 4 When X is fixed find a Y X that minimizes kk when Y X is subject to (17) The solving steps are as follows (1) Choose the R LMI -stable α that is generated by Datta s method as the initial value and calculate γ = k k (2) Solve Question 3 andgetafeasiblesolutionx = X α (3) Solve Question 4 and get the optimal Y = Y X (4) Calculate γ = k (k ) ;if γ γ <εstop(εis the permitted tolerance) (5) If γ <γ let α = Y X 1 and repeat step (2) to step (4);elsestop Because Datta s method involves replacing a nonconvex set with its inner convex approximation necessarily there exists some conservatism With the iterative optimization above we can reduce kk more or less 4 Examples In this section the proposed method is applied to those two examples given by Datta et al [16]Theresultsshowthatthe new method produces better results than Datta s Example 1 Consider a single-input system with A = [ 1 1 [ 1 ] b = [ [ ] (2) [ ] [ 1] A critical closed loop pole is placed at 1 and the remaining 3 polesareallowedtobeplacedarbitrarilyontheleftsideofa
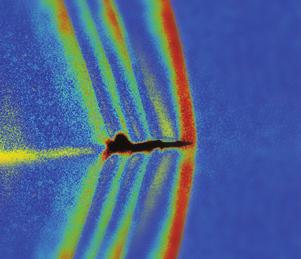
4 4 Control Science and Engineering k 2 Im Iteration number Figure 1: Iterative process of Example Re Poles of Datta s method Poles after iterative optimization Figure 2: Closed loop poles of Example 1 vertical line at 5 in the complex plane So the R LMI region is chosen as R =[ 1 1 ] (21) 1 Placing poles via the proposed method we can get the feedback gain k =[ ] Then theclosedlooppolesareat and 5 andthe 2-norm of k is k 2 = while Datta s result is The iterative process and closed loop poles are respectively depicted in Figures 1 and 2 Example 2 In this example a 1th order single-input LTI system provided by Datta is considered A =[ A 11 A 12 A 21 A 22 ] A 11 = [ ] [ ] A 12 = [ ] [ ] A 21 = [ ] [ ] A 22 = [ ] [ ] b = [ ] (22) Four critical poles are placed at 2 ± 69261i and 2 ± and the remaining six noncritical poles are placed in a disc with center at ( 8 ) and radius 76 ThematrixR is chosen as R = [ [ ] (23) [ 1 ] The feedback gain produced by the new method is k = [ ] (24) with its 2-norm being k 2 = 424 whichisbetterthan Datta s The iterative solving process is as in Figure 3 and closed loop poles are as in Figure 4 5 Conclusion A new sufficient condition for R LMI -stability is derived first ThenbasedonitpartialpoleplacementinLMIregion
5 Control Science and Engineering 5 k 2 Im Iteration number Figure 3: Iterative process of Example Re Poles of Datta s method Poles after iterative optimization Figure 4: Closed loop poles of Example 2 with minimum norm controller is established as a nonlinear matrix inequality problem An iterative strategy is proposed to deal with this problem The new method is shown to produce better results than Datta s The future work is to extend the partial pole placement from single-input system to multi-input system Conflict of Interests The authors declare that there is no conflict of interests regarding the publication of this paper Acknowledgments This paper was supported in part by National Nature Science Foundation of China (nos and ) Doctoral Fund of Ministry of Education of China (no ) and Precision Manufacturing Technology and Equipment for Metal Parts (no 212DFG764) References [1] T Kailath Linear SystemsPrentice-HallEnglewoodCliffsNJ USA 198 [2] M Chilali and P Gahinet H design with pole placement constraints: an LMI approach IEEE Transactions on Automatic Controlvol41no3pp [3] M Chilali P Gahinet and P Apkarian Robust pole placement in LMI regions IEEE Transactions on Automatic Control vol 44no12pp [4] S P Boyd Linear Matrix Inequalities in System and Control TheorySIAM1994 [5] D Peaucelle D Arzelier O Bachelier and J Bernussou A new robust script D sign-stability condition for real convex polytopic uncertainty Systems and Control Letters vol4no1pp [6]VJLeiteandPLPeres AnimprovedLMIconditionfor robust D-stability of uncertain polytopic systems IEEE Transactions on Automatic Controlvol48no3pp [7]WJMaoandJChu Quadraticstabilityandstabilization of dynamic interval systems IEEE Transactions on Automatic Controlvol48no6pp [8] DHenrionDPeaucelleDArzelierandMSebek Ellipsoidal approximation of the stability domain of a polynomial IEEE Transactions on Automatic Control vol48no12pp [9] DHenrionMSebekandVKucera Positivepolynomialsand robust stabilization with fixed-order controllers IEEE Transactions on Automatic Controlvol48no7pp [1] FYangMGaniandDHenrion Fixed-orderrobustH controller design with regional pole assignment IEEE Transactions on Automatic Controlvol52no1pp [11] N Maamri O Bachelier and D Mehdi Pole placement in a union of regions with prespecified subregion allocation Mathematics and Computers in Simulationvol72no1pp [12] ORejichiOBachelierMChaabaneandDMehdi Robust root-clustering analysis in a union of subregions for descriptor systems IET Control Theory and Applications vol2no7pp [13] BSariOBachelierJBoscheNMaamriandDMehdi Pole placement in non connected regions for descriptor models Mathematics and Computers in Simulation vol81no12pp [14] S-K Yang Robust pole-clustering of structured uncertain systems in union of disjointed circular regions Applied Mathematics and Computationvol217no18pp [15] S Datta B Chaudhuri and D Chakraborty Partial pole placement with minimum norm controller in Proceedings of the 49th IEEE Conference on Decision and Control (CDC 1) pp Atlanta Ga USA December 21 [16] S Datta D Chakraborty and B Chaudhuri Partial pole placement with controller optimization IEEE Transactions on Automatic Controlvol57no4pp



















6 Rotating Machinery Engineering The Scientific World Journal Distributed Sensor Networks Sensors Control Science and Engineering Advances in Civil Engineering Submit your manuscripts at Electrical and Computer Engineering Robotics VLSI Design Advances in OptoElectronics Navigation and Observation Chemical Engineering Active and Passive Electronic Components Antennas and Propagation Aerospace Engineering Modelling & Simulation in Engineering Shock and Vibration Advances in Acoustics and Vibration
Research Article An Equivalent LMI Representation of Bounded Real Lemma for Continuous-Time Systems
 Hindawi Publishing Corporation Journal of Inequalities and Applications Volume 28, Article ID 67295, 8 pages doi:1.1155/28/67295 Research Article An Equivalent LMI Representation of Bounded Real Lemma
Hindawi Publishing Corporation Journal of Inequalities and Applications Volume 28, Article ID 67295, 8 pages doi:1.1155/28/67295 Research Article An Equivalent LMI Representation of Bounded Real Lemma
Multiobjective Optimization Applied to Robust H 2 /H State-feedback Control Synthesis
 Multiobjective Optimization Applied to Robust H 2 /H State-feedback Control Synthesis Eduardo N. Gonçalves, Reinaldo M. Palhares, and Ricardo H. C. Takahashi Abstract This paper presents an algorithm for
Multiobjective Optimization Applied to Robust H 2 /H State-feedback Control Synthesis Eduardo N. Gonçalves, Reinaldo M. Palhares, and Ricardo H. C. Takahashi Abstract This paper presents an algorithm for
Research Article Convex Polyhedron Method to Stability of Continuous Systems with Two Additive Time-Varying Delay Components
 Applied Mathematics Volume 202, Article ID 689820, 3 pages doi:0.55/202/689820 Research Article Convex Polyhedron Method to Stability of Continuous Systems with Two Additive Time-Varying Delay Components
Applied Mathematics Volume 202, Article ID 689820, 3 pages doi:0.55/202/689820 Research Article Convex Polyhedron Method to Stability of Continuous Systems with Two Additive Time-Varying Delay Components
ON POLE PLACEMENT IN LMI REGION FOR DESCRIPTOR LINEAR SYSTEMS. Received January 2011; revised May 2011
 International Journal of Innovative Computing, Information and Control ICIC International c 2012 ISSN 1349-4198 Volume 8, Number 4, April 2012 pp. 2613 2624 ON POLE PLACEMENT IN LMI REGION FOR DESCRIPTOR
International Journal of Innovative Computing, Information and Control ICIC International c 2012 ISSN 1349-4198 Volume 8, Number 4, April 2012 pp. 2613 2624 ON POLE PLACEMENT IN LMI REGION FOR DESCRIPTOR
Fixed Order H Controller for Quarter Car Active Suspension System
 Fixed Order H Controller for Quarter Car Active Suspension System B. Erol, A. Delibaşı Abstract This paper presents an LMI based fixed-order controller design for quarter car active suspension system in
Fixed Order H Controller for Quarter Car Active Suspension System B. Erol, A. Delibaşı Abstract This paper presents an LMI based fixed-order controller design for quarter car active suspension system in
Research Article Two Mathematical Models for Generation of Crowned Tooth Surface
 e Scientific World Journal, Article ID 6409, 6 pages http://dx.doi.org/0.55/204/6409 Research Article Two Mathematical Models for Generation of Crowned Tooth Surface Laszlo Kelemen and Jozsef Szente University
e Scientific World Journal, Article ID 6409, 6 pages http://dx.doi.org/0.55/204/6409 Research Article Two Mathematical Models for Generation of Crowned Tooth Surface Laszlo Kelemen and Jozsef Szente University
Research Article The Microphone Feedback Analogy for Chatter in Machining
 Shock and Vibration Volume 215, Article ID 976819, 5 pages http://dx.doi.org/1.1155/215/976819 Research Article The Microphone Feedback Analogy for Chatter in Machining Tony Schmitz UniversityofNorthCarolinaatCharlotte,Charlotte,NC28223,USA
Shock and Vibration Volume 215, Article ID 976819, 5 pages http://dx.doi.org/1.1155/215/976819 Research Article The Microphone Feedback Analogy for Chatter in Machining Tony Schmitz UniversityofNorthCarolinaatCharlotte,Charlotte,NC28223,USA
Fixed-Order Robust H Controller Design with Regional Pole Assignment
 SUBMITTED 1 Fixed-Order Robust H Controller Design with Regional Pole Assignment Fuwen Yang, Mahbub Gani, and Didier Henrion Abstract In this paper, the problem of designing fixed-order robust H controllers
SUBMITTED 1 Fixed-Order Robust H Controller Design with Regional Pole Assignment Fuwen Yang, Mahbub Gani, and Didier Henrion Abstract In this paper, the problem of designing fixed-order robust H controllers
Research Article Forward and Reverse Movements of a Linear Positioning Stage Based on the Parasitic Motion Principle
 Advances in Mechanical Engineering, Article ID 45256, 7 pages http://dx.doi.org/1.1155/214/45256 Research Article Forward and Reverse Movements of a Linear Positioning Stage Based on the Parasitic Motion
Advances in Mechanical Engineering, Article ID 45256, 7 pages http://dx.doi.org/1.1155/214/45256 Research Article Forward and Reverse Movements of a Linear Positioning Stage Based on the Parasitic Motion
Research Article The Application of Baum-Welch Algorithm in Multistep Attack
 e Scientific World Journal, Article ID 374260, 7 pages http://dx.doi.org/10.1155/2014/374260 Research Article The Application of Baum-Welch Algorithm in Multistep Attack Yanxue Zhang, 1 Dongmei Zhao, 2
e Scientific World Journal, Article ID 374260, 7 pages http://dx.doi.org/10.1155/2014/374260 Research Article The Application of Baum-Welch Algorithm in Multistep Attack Yanxue Zhang, 1 Dongmei Zhao, 2
Research Letter An Algorithm to Generate Representations of System Identification Errors
 Research Letters in Signal Processing Volume 008, Article ID 5991, 4 pages doi:10.1155/008/5991 Research Letter An Algorithm to Generate Representations of System Identification Errors Wancheng Zhang and
Research Letters in Signal Processing Volume 008, Article ID 5991, 4 pages doi:10.1155/008/5991 Research Letter An Algorithm to Generate Representations of System Identification Errors Wancheng Zhang and
ROBUST STABILITY TEST FOR UNCERTAIN DISCRETE-TIME SYSTEMS: A DESCRIPTOR SYSTEM APPROACH
 Latin American Applied Research 41: 359-364(211) ROBUS SABILIY ES FOR UNCERAIN DISCREE-IME SYSEMS: A DESCRIPOR SYSEM APPROACH W. ZHANG,, H. SU, Y. LIANG, and Z. HAN Engineering raining Center, Shanghai
Latin American Applied Research 41: 359-364(211) ROBUS SABILIY ES FOR UNCERAIN DISCREE-IME SYSEMS: A DESCRIPOR SYSEM APPROACH W. ZHANG,, H. SU, Y. LIANG, and Z. HAN Engineering raining Center, Shanghai
Research Article Travel-Time Difference Extracting in Experimental Study of Rayleigh Wave Acoustoelastic Effect
 ISRN Mechanical Engineering, Article ID 3492, 7 pages http://dx.doi.org/.55/24/3492 Research Article Travel-Time Difference Extracting in Experimental Study of Rayleigh Wave Acoustoelastic Effect Hu Eryi
ISRN Mechanical Engineering, Article ID 3492, 7 pages http://dx.doi.org/.55/24/3492 Research Article Travel-Time Difference Extracting in Experimental Study of Rayleigh Wave Acoustoelastic Effect Hu Eryi
Research Article Propagation Characteristics of Oblique Incident Terahertz Wave in Nonuniform Dusty Plasma
 Antennas and Propagation Volume 216, Article ID 945473, 6 pages http://dx.doi.org/1.1155/216/945473 Research Article Propagation Characteristics of Oblique Incident Terahert Wave in Nonuniform Dusty Plasma
Antennas and Propagation Volume 216, Article ID 945473, 6 pages http://dx.doi.org/1.1155/216/945473 Research Article Propagation Characteristics of Oblique Incident Terahert Wave in Nonuniform Dusty Plasma
Trace inequalities for positive semidefinite matrices with centrosymmetric structure
 Zhao et al Journal of Inequalities pplications 1, 1:6 http://wwwjournalofinequalitiesapplicationscom/content/1/1/6 RESERCH Trace inequalities for positive semidefinite matrices with centrosymmetric structure
Zhao et al Journal of Inequalities pplications 1, 1:6 http://wwwjournalofinequalitiesapplicationscom/content/1/1/6 RESERCH Trace inequalities for positive semidefinite matrices with centrosymmetric structure
Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators
 Shock and Vibration, Article ID 71814, 5 pages http://dx.doi.org/1.1155/214/71814 Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators Sajad
Shock and Vibration, Article ID 71814, 5 pages http://dx.doi.org/1.1155/214/71814 Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators Sajad
Research Article Doppler Velocity Estimation of Overlapping Linear-Period-Modulated Ultrasonic Waves Based on an Expectation-Maximization Algorithm
 Advances in Acoustics and Vibration, Article ID 9876, 7 pages http://dx.doi.org/.55//9876 Research Article Doppler Velocity Estimation of Overlapping Linear-Period-Modulated Ultrasonic Waves Based on an
Advances in Acoustics and Vibration, Article ID 9876, 7 pages http://dx.doi.org/.55//9876 Research Article Doppler Velocity Estimation of Overlapping Linear-Period-Modulated Ultrasonic Waves Based on an
ROBUST CONTROLLER DESIGN: POLYNOMIALLY PARAMETER DEPENDENT LYAPUNOV FUNCTION APPROACH
 Journal of ELECTRICAL ENGINEERING, VOL 58, NO 6, 2007, 313 317 ROBUST CONTROLLER DESIGN: POLYNOMIALLY PARAMETER DEPENDENT LYAPUNOV FUNCTION APPROACH Vojtech Veselý The paper addresses the problem of robust
Journal of ELECTRICAL ENGINEERING, VOL 58, NO 6, 2007, 313 317 ROBUST CONTROLLER DESIGN: POLYNOMIALLY PARAMETER DEPENDENT LYAPUNOV FUNCTION APPROACH Vojtech Veselý The paper addresses the problem of robust
An Exact Stability Analysis Test for Single-Parameter. Polynomially-Dependent Linear Systems
 An Exact Stability Analysis Test for Single-Parameter Polynomially-Dependent Linear Systems P. Tsiotras and P.-A. Bliman Abstract We provide a new condition for testing the stability of a single-parameter,
An Exact Stability Analysis Test for Single-Parameter Polynomially-Dependent Linear Systems P. Tsiotras and P.-A. Bliman Abstract We provide a new condition for testing the stability of a single-parameter,
Research Article Simplified Robotics Joint-Space Trajectory Generation with a via Point Using a Single Polynomial
 Robotics Volume, Article ID 75958, 6 pages http://dx.doi.org/.55//75958 Research Article Simplified Robotics Joint-Space Trajectory Generation with a via Point Using a Single Polynomial Robert L. Williams
Robotics Volume, Article ID 75958, 6 pages http://dx.doi.org/.55//75958 Research Article Simplified Robotics Joint-Space Trajectory Generation with a via Point Using a Single Polynomial Robert L. Williams
Research Article On the Security of a Novel Probabilistic Signature Based on Bilinear Square Diffie-Hellman Problem and Its Extension
 e Scientific World Journal, Article ID 345686, 4 pages http://dx.doi.org/10.1155/2014/345686 Research Article On the Security of a Novel Probabilistic Signature Based on Bilinear Square Diffie-Hellman
e Scientific World Journal, Article ID 345686, 4 pages http://dx.doi.org/10.1155/2014/345686 Research Article On the Security of a Novel Probabilistic Signature Based on Bilinear Square Diffie-Hellman
Research Article State-PID Feedback for Pole Placement of LTI Systems
 Mathematical Problems in Engineering Volume 211, Article ID 92943, 2 pages doi:1.1155/211/92943 Research Article State-PID Feedback for Pole Placement of LTI Systems Sarawut Sujitjorn and Witchupong Wiboonjaroen
Mathematical Problems in Engineering Volume 211, Article ID 92943, 2 pages doi:1.1155/211/92943 Research Article State-PID Feedback for Pole Placement of LTI Systems Sarawut Sujitjorn and Witchupong Wiboonjaroen
Research Article Trapped-Mode Resonance Regime of Thin Microwave Electromagnetic Arrays with Two Concentric Rings in Unit Cell
 Microwave Science and Technology Volume 2, Article ID 3688, 6 pages doi:.55/2/3688 Research Article Trapped-Mode Resonance Regime of Thin Microwave Electromagnetic Arrays with Two Concentric Rings in Unit
Microwave Science and Technology Volume 2, Article ID 3688, 6 pages doi:.55/2/3688 Research Article Trapped-Mode Resonance Regime of Thin Microwave Electromagnetic Arrays with Two Concentric Rings in Unit
Optimization based robust control
 Optimization based robust control Didier Henrion 1,2 Draft of March 27, 2014 Prepared for possible inclusion into The Encyclopedia of Systems and Control edited by John Baillieul and Tariq Samad and published
Optimization based robust control Didier Henrion 1,2 Draft of March 27, 2014 Prepared for possible inclusion into The Encyclopedia of Systems and Control edited by John Baillieul and Tariq Samad and published
Research Article A New Type of Magnetic Actuator Capable of Wall-Climbing Movement Using Inertia Force
 Engineering Volume 14, Article ID 93178, 6 pages http://dx.doi.org/1.1155/14/93178 Research Article A New Type of Magnetic Actuator Capable of Wall-Climbing Movement Using Inertia Force H. Yaguchi, S.
Engineering Volume 14, Article ID 93178, 6 pages http://dx.doi.org/1.1155/14/93178 Research Article A New Type of Magnetic Actuator Capable of Wall-Climbing Movement Using Inertia Force H. Yaguchi, S.
Research Article Influence of the Parameterization in the Interval Solution of Elastic Beams
 Structures Volume 04, Article ID 3953, 5 pages http://dx.doi.org/0.55/04/3953 Research Article Influence of the Parameterization in the Interval Solution of Elastic Beams Stefano Gabriele and Valerio Varano
Structures Volume 04, Article ID 3953, 5 pages http://dx.doi.org/0.55/04/3953 Research Article Influence of the Parameterization in the Interval Solution of Elastic Beams Stefano Gabriele and Valerio Varano
H State-Feedback Controller Design for Discrete-Time Fuzzy Systems Using Fuzzy Weighting-Dependent Lyapunov Functions
 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL 11, NO 2, APRIL 2003 271 H State-Feedback Controller Design for Discrete-Time Fuzzy Systems Using Fuzzy Weighting-Dependent Lyapunov Functions Doo Jin Choi and PooGyeon
IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL 11, NO 2, APRIL 2003 271 H State-Feedback Controller Design for Discrete-Time Fuzzy Systems Using Fuzzy Weighting-Dependent Lyapunov Functions Doo Jin Choi and PooGyeon
Research Article A Note on Kantorovich Inequality for Hermite Matrices
 Hindawi Publishing Corporation Journal of Inequalities and Applications Volume 0, Article ID 5767, 6 pages doi:0.55/0/5767 Research Article A Note on Kantorovich Inequality for Hermite Matrices Zhibing
Hindawi Publishing Corporation Journal of Inequalities and Applications Volume 0, Article ID 5767, 6 pages doi:0.55/0/5767 Research Article A Note on Kantorovich Inequality for Hermite Matrices Zhibing
Research Article Robust Admissibilization of Descriptor Systems by Static Output-Feedback: An LMI Approach
 Mathematical Problems in Engineering Volume 2011, Article ID 960981, 10 pages doi:10.1155/2011/960981 Research Article Robust Admissibilization of Descriptor Systems by Static Output-Feedback: An LMI Approach
Mathematical Problems in Engineering Volume 2011, Article ID 960981, 10 pages doi:10.1155/2011/960981 Research Article Robust Admissibilization of Descriptor Systems by Static Output-Feedback: An LMI Approach
Research Article Study on Zero-Doppler Centroid Control for GEO SAR Ground Observation
 Antennas and Propagation Article ID 549269 7 pages http://dx.doi.org/1.1155/214/549269 Research Article Study on Zero-Doppler Centroid Control for GEO SAR Ground Observation Yicheng Jiang Bin Hu Yun Zhang
Antennas and Propagation Article ID 549269 7 pages http://dx.doi.org/1.1155/214/549269 Research Article Study on Zero-Doppler Centroid Control for GEO SAR Ground Observation Yicheng Jiang Bin Hu Yun Zhang
PARAMETERIZATION OF STATE FEEDBACK GAINS FOR POLE PLACEMENT
 PARAMETERIZATION OF STATE FEEDBACK GAINS FOR POLE PLACEMENT Hans Norlander Systems and Control, Department of Information Technology Uppsala University P O Box 337 SE 75105 UPPSALA, Sweden HansNorlander@ituuse
PARAMETERIZATION OF STATE FEEDBACK GAINS FOR POLE PLACEMENT Hans Norlander Systems and Control, Department of Information Technology Uppsala University P O Box 337 SE 75105 UPPSALA, Sweden HansNorlander@ituuse
Graph and Controller Design for Disturbance Attenuation in Consensus Networks
 203 3th International Conference on Control, Automation and Systems (ICCAS 203) Oct. 20-23, 203 in Kimdaejung Convention Center, Gwangju, Korea Graph and Controller Design for Disturbance Attenuation in
203 3th International Conference on Control, Automation and Systems (ICCAS 203) Oct. 20-23, 203 in Kimdaejung Convention Center, Gwangju, Korea Graph and Controller Design for Disturbance Attenuation in
On Computing the Worst-case Performance of Lur'e Systems with Uncertain Time-invariant Delays
 Article On Computing the Worst-case Performance of Lur'e Systems with Uncertain Time-invariant Delays Thapana Nampradit and David Banjerdpongchai* Department of Electrical Engineering, Faculty of Engineering,
Article On Computing the Worst-case Performance of Lur'e Systems with Uncertain Time-invariant Delays Thapana Nampradit and David Banjerdpongchai* Department of Electrical Engineering, Faculty of Engineering,
Research Article Weather Forecasting Using Sliding Window Algorithm
 ISRN Signal Processing Volume 23, Article ID 5654, 5 pages http://dx.doi.org/.55/23/5654 Research Article Weather Forecasting Using Sliding Window Algorithm Piyush Kapoor and Sarabjeet Singh Bedi 2 KvantumInc.,Gurgaon22,India
ISRN Signal Processing Volume 23, Article ID 5654, 5 pages http://dx.doi.org/.55/23/5654 Research Article Weather Forecasting Using Sliding Window Algorithm Piyush Kapoor and Sarabjeet Singh Bedi 2 KvantumInc.,Gurgaon22,India
Simultaneous State and Fault Estimation for Descriptor Systems using an Augmented PD Observer
 Preprints of the 19th World Congress The International Federation of Automatic Control Simultaneous State and Fault Estimation for Descriptor Systems using an Augmented PD Observer Fengming Shi*, Ron J.
Preprints of the 19th World Congress The International Federation of Automatic Control Simultaneous State and Fault Estimation for Descriptor Systems using an Augmented PD Observer Fengming Shi*, Ron J.
Research Article Observer-Based Robust Passive Control for a Class of Uncertain Neutral Systems: An Integral Sliding Mode Approach
 Journal of Control Science and Engineering Volume 215, Article ID 38681, 1 pages http://dx.doi.org/1.1155/215/38681 Research Article Observer-Based Robust Passive Control for a Class of Uncertain Neutral
Journal of Control Science and Engineering Volume 215, Article ID 38681, 1 pages http://dx.doi.org/1.1155/215/38681 Research Article Observer-Based Robust Passive Control for a Class of Uncertain Neutral
Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
Introduction to linear matrix inequalities Wojciech Paszke
 Introduction to linear matrix inequalities Wojciech Paszke Institute of Control and Computation Engineering, University of Zielona Góra, Poland e-mail: W.Paszke@issi.uz.zgora.pl Outline Introduction to
Introduction to linear matrix inequalities Wojciech Paszke Institute of Control and Computation Engineering, University of Zielona Góra, Poland e-mail: W.Paszke@issi.uz.zgora.pl Outline Introduction to
Research Article A New Roper-Suffridge Extension Operator on a Reinhardt Domain
 Abstract and Applied Analysis Volume 2011, Article ID 865496, 14 pages doi:10.1155/2011/865496 Research Article A New Roper-Suffridge Extension Operator on a Reinhardt Domain Jianfei Wang and Cailing Gao
Abstract and Applied Analysis Volume 2011, Article ID 865496, 14 pages doi:10.1155/2011/865496 Research Article A New Roper-Suffridge Extension Operator on a Reinhardt Domain Jianfei Wang and Cailing Gao
Parameterized Linear Matrix Inequality Techniques in Fuzzy Control System Design
 324 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 9, NO. 2, APRIL 2001 Parameterized Linear Matrix Inequality Techniques in Fuzzy Control System Design H. D. Tuan, P. Apkarian, T. Narikiyo, and Y. Yamamoto
324 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 9, NO. 2, APRIL 2001 Parameterized Linear Matrix Inequality Techniques in Fuzzy Control System Design H. D. Tuan, P. Apkarian, T. Narikiyo, and Y. Yamamoto
Research Article Attracting Periodic Cycles for an Optimal Fourth-Order Nonlinear Solver
 Abstract and Applied Analysis Volume 01, Article ID 63893, 8 pages doi:10.1155/01/63893 Research Article Attracting Periodic Cycles for an Optimal Fourth-Order Nonlinear Solver Mi Young Lee and Changbum
Abstract and Applied Analysis Volume 01, Article ID 63893, 8 pages doi:10.1155/01/63893 Research Article Attracting Periodic Cycles for an Optimal Fourth-Order Nonlinear Solver Mi Young Lee and Changbum
Research Article Stabilizing of Subspaces Based on DPGA and Chaos Genetic Algorithm for Optimizing State Feedback Controller
 Mathematical Problems in Engineering Volume 2012, Article ID 186481, 9 pages doi:10.1155/2012/186481 Research Article Stabilizing of Subspaces Based on DPGA and Chaos Genetic Algorithm for Optimizing State
Mathematical Problems in Engineering Volume 2012, Article ID 186481, 9 pages doi:10.1155/2012/186481 Research Article Stabilizing of Subspaces Based on DPGA and Chaos Genetic Algorithm for Optimizing State
Research Article On Exponential Stability Conditions of Descriptor Systems with Time-Varying Delay
 Applied Mathematics Volume 2012, Article ID 532912, 12 pages doi:10.1155/2012/532912 Research Article On Exponential Stability Conditions of Descriptor Systems with Time-Varying Delay S. Cong and Z.-B.
Applied Mathematics Volume 2012, Article ID 532912, 12 pages doi:10.1155/2012/532912 Research Article On Exponential Stability Conditions of Descriptor Systems with Time-Varying Delay S. Cong and Z.-B.
Research Article Circle-Uniqueness of Pythagorean Orthogonality in Normed Linear Spaces
 Function Spaces, Article ID 634842, 4 pages http://dx.doi.org/10.1155/2014/634842 Research Article Circle-Uniqueness of Pythagorean Orthogonality in Normed Linear Spaces Senlin Wu, Xinjian Dong, and Dan
Function Spaces, Article ID 634842, 4 pages http://dx.doi.org/10.1155/2014/634842 Research Article Circle-Uniqueness of Pythagorean Orthogonality in Normed Linear Spaces Senlin Wu, Xinjian Dong, and Dan
Research Article Band Structure Engineering in 2D Photonic Crystal Waveguide with Rhombic Cross-Section Elements
 Advances in Optical Technologies Volume 214, Article ID 78142, 5 pages http://dx.doi.org/1155/214/78142 Research Article Band Structure Engineering in 2D Photonic Crystal Waveguide with Rhombic Cross-Section
Advances in Optical Technologies Volume 214, Article ID 78142, 5 pages http://dx.doi.org/1155/214/78142 Research Article Band Structure Engineering in 2D Photonic Crystal Waveguide with Rhombic Cross-Section
KingSaudBinAbdulazizUniversityforHealthScience,Riyadh11481,SaudiArabia. Correspondence should be addressed to Raghib Abu-Saris;
 Chaos Volume 26, Article ID 49252, 7 pages http://dx.doi.org/.55/26/49252 Research Article On Matrix Projective Synchronization and Inverse Matrix Projective Synchronization for Different and Identical
Chaos Volume 26, Article ID 49252, 7 pages http://dx.doi.org/.55/26/49252 Research Article On Matrix Projective Synchronization and Inverse Matrix Projective Synchronization for Different and Identical
LMI based output-feedback controllers: γ-optimal versus linear quadratic.
 Proceedings of the 17th World Congress he International Federation of Automatic Control Seoul Korea July 6-11 28 LMI based output-feedback controllers: γ-optimal versus linear quadratic. Dmitry V. Balandin
Proceedings of the 17th World Congress he International Federation of Automatic Control Seoul Korea July 6-11 28 LMI based output-feedback controllers: γ-optimal versus linear quadratic. Dmitry V. Balandin
Research Article Constrained Solutions of a System of Matrix Equations
 Journal of Applied Mathematics Volume 2012, Article ID 471573, 19 pages doi:10.1155/2012/471573 Research Article Constrained Solutions of a System of Matrix Equations Qing-Wen Wang 1 and Juan Yu 1, 2 1
Journal of Applied Mathematics Volume 2012, Article ID 471573, 19 pages doi:10.1155/2012/471573 Research Article Constrained Solutions of a System of Matrix Equations Qing-Wen Wang 1 and Juan Yu 1, 2 1
Homogeneous polynomially parameter-dependent state feedback controllers for finite time stabilization of linear time-varying systems
 23 European Control Conference (ECC) July 7-9, 23, Zürich, Switzerland. Homogeneous polynomially parameter-dependent state feedback controllers for finite time stabilization of linear time-varying systems
23 European Control Conference (ECC) July 7-9, 23, Zürich, Switzerland. Homogeneous polynomially parameter-dependent state feedback controllers for finite time stabilization of linear time-varying systems
Research Article A Mathematical Images Group Model to Estimate the Sound Level in a Close-Fitting Enclosure
 Advances in Acoustics and Vibration, Article ID 284362, 7 pages http://dx.doi.org/10.1155/2014/284362 Research Article A Mathematical Images Group Model to Estimate the Sound Level in a Close-Fitting Enclosure
Advances in Acoustics and Vibration, Article ID 284362, 7 pages http://dx.doi.org/10.1155/2014/284362 Research Article A Mathematical Images Group Model to Estimate the Sound Level in a Close-Fitting Enclosure
Research Article Electromagnetic and Mechanical Characteristics Analysis of a Flat-Type Vertical-Gap Passive Magnetic Levitation Vibration Isolator
 Shock and Vibration Volume 6, Article ID 577, pages http://dx.doi.org/.55/6/577 Research Article Electromagnetic and Mechanical Characteristics Analysis of a Flat-Type Vertical-Gap Passive Magnetic Levitation
Shock and Vibration Volume 6, Article ID 577, pages http://dx.doi.org/.55/6/577 Research Article Electromagnetic and Mechanical Characteristics Analysis of a Flat-Type Vertical-Gap Passive Magnetic Levitation
Research Article Robust Switching Control Strategy for a Transmission System with Unknown Backlash
 Mathematical Problems in Engineering Volume 24, Article ID 79384, 8 pages http://dx.doi.org/.55/24/79384 Research Article Robust Switching Control Strategy for a Transmission System with Unknown Backlash
Mathematical Problems in Engineering Volume 24, Article ID 79384, 8 pages http://dx.doi.org/.55/24/79384 Research Article Robust Switching Control Strategy for a Transmission System with Unknown Backlash
Linear Matrix Inequalities in Robust Control. Venkataramanan (Ragu) Balakrishnan School of ECE, Purdue University MTNS 2002
 Balakrishnan School of ECE, Purdue University MTNS 2002") Linear Matrix Inequalities in Robust Control Venkataramanan (Ragu) Balakrishnan School of ECE, Purdue University MTNS 2002 Objective A brief introduction to LMI techniques for Robust Control Emphasis on
Linear Matrix Inequalities in Robust Control Venkataramanan (Ragu) Balakrishnan School of ECE, Purdue University MTNS 2002 Objective A brief introduction to LMI techniques for Robust Control Emphasis on
Multiobjective H 2 /H /impulse-to-peak synthesis: Application to the control of an aerospace launcher
 Multiobjective H /H /impulse-to-peak synthesis: Application to the control of an aerospace launcher D. Arzelier, D. Peaucelle LAAS-CNRS, 7 Avenue du Colonel Roche, 3 77 Toulouse, Cedex 4, France emails:
Multiobjective H /H /impulse-to-peak synthesis: Application to the control of an aerospace launcher D. Arzelier, D. Peaucelle LAAS-CNRS, 7 Avenue du Colonel Roche, 3 77 Toulouse, Cedex 4, France emails:
A New Strategy to the Multi-Objective Control of Linear Systems
 Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference 25 Seville, Spain, December 12-15, 25 TuC8.6 A New Strategy to the Multi-Objective Control of Linear
Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference 25 Seville, Spain, December 12-15, 25 TuC8.6 A New Strategy to the Multi-Objective Control of Linear
Robust Multi-Objective Control for Linear Systems
 Robust Multi-Objective Control for Linear Systems Elements of theory and ROMULOC toolbox Dimitri PEAUCELLE & Denis ARZELIER LAAS-CNRS, Toulouse, FRANCE Part of the OLOCEP project (includes GloptiPoly)
Robust Multi-Objective Control for Linear Systems Elements of theory and ROMULOC toolbox Dimitri PEAUCELLE & Denis ARZELIER LAAS-CNRS, Toulouse, FRANCE Part of the OLOCEP project (includes GloptiPoly)
ROBUST PASSIVE OBSERVER-BASED CONTROL FOR A CLASS OF SINGULAR SYSTEMS
 INTERNATIONAL JOURNAL OF INFORMATON AND SYSTEMS SCIENCES Volume 5 Number 3-4 Pages 480 487 c 2009 Institute for Scientific Computing and Information ROBUST PASSIVE OBSERVER-BASED CONTROL FOR A CLASS OF
INTERNATIONAL JOURNAL OF INFORMATON AND SYSTEMS SCIENCES Volume 5 Number 3-4 Pages 480 487 c 2009 Institute for Scientific Computing and Information ROBUST PASSIVE OBSERVER-BASED CONTROL FOR A CLASS OF
Delay-Dependent Stability Criteria for Linear Systems with Multiple Time Delays
 Delay-Dependent Stability Criteria for Linear Systems with Multiple Time Delays Yong He, Min Wu, Jin-Hua She Abstract This paper deals with the problem of the delay-dependent stability of linear systems
Delay-Dependent Stability Criteria for Linear Systems with Multiple Time Delays Yong He, Min Wu, Jin-Hua She Abstract This paper deals with the problem of the delay-dependent stability of linear systems
Research Article Solving the Matrix Nearness Problem in the Maximum Norm by Applying a Projection and Contraction Method
 Advances in Operations Research Volume 01, Article ID 357954, 15 pages doi:10.1155/01/357954 Research Article Solving the Matrix Nearness Problem in the Maximum Norm by Applying a Projection and Contraction
Advances in Operations Research Volume 01, Article ID 357954, 15 pages doi:10.1155/01/357954 Research Article Solving the Matrix Nearness Problem in the Maximum Norm by Applying a Projection and Contraction
Polynomial Stabilization with Bounds on the Controller Coefficients
 Proceedings of the 8th IFAC Symposium on Robust Control Design, Bratislava, Slovak Republic, July 8-, 25 Polynomial Stabilization with Bounds on the Controller Coefficients Julia Eaton Sara Grundel Mert
Proceedings of the 8th IFAC Symposium on Robust Control Design, Bratislava, Slovak Republic, July 8-, 25 Polynomial Stabilization with Bounds on the Controller Coefficients Julia Eaton Sara Grundel Mert
Research Article Robust Fault Diagnosis Design for Linear Multiagent Systems with Incipient Faults
 Mathematical Problems in Engineering Volume 215, Article ID 436935, 7 pages http://dx.doi.org/1.1155/215/436935 Research Article Robust Fault Diagnosis Design for Linear Multiagent Systems with Incipient
Mathematical Problems in Engineering Volume 215, Article ID 436935, 7 pages http://dx.doi.org/1.1155/215/436935 Research Article Robust Fault Diagnosis Design for Linear Multiagent Systems with Incipient
Research Article A Generalization of a Class of Matrices: Analytic Inverse and Determinant
 Advances in Numerical Analysis Volume 2011, Article ID 593548, 6 pages doi:10.1155/2011/593548 Research Article A Generalization of a Class of Matrices: Analytic Inverse and Determinant F. N. Valvi Department
Advances in Numerical Analysis Volume 2011, Article ID 593548, 6 pages doi:10.1155/2011/593548 Research Article A Generalization of a Class of Matrices: Analytic Inverse and Determinant F. N. Valvi Department
Research Article Minor Prime Factorization for n-d Polynomial Matrices over Arbitrary Coefficient Field
 Complexity, Article ID 6235649, 9 pages https://doi.org/10.1155/2018/6235649 Research Article Minor Prime Factorization for n-d Polynomial Matrices over Arbitrary Coefficient Field Jinwang Liu, Dongmei
Complexity, Article ID 6235649, 9 pages https://doi.org/10.1155/2018/6235649 Research Article Minor Prime Factorization for n-d Polynomial Matrices over Arbitrary Coefficient Field Jinwang Liu, Dongmei
Research Article The Solution Set Characterization and Error Bound for the Extended Mixed Linear Complementarity Problem
 Journal of Applied Mathematics Volume 2012, Article ID 219478, 15 pages doi:10.1155/2012/219478 Research Article The Solution Set Characterization and Error Bound for the Extended Mixed Linear Complementarity
Journal of Applied Mathematics Volume 2012, Article ID 219478, 15 pages doi:10.1155/2012/219478 Research Article The Solution Set Characterization and Error Bound for the Extended Mixed Linear Complementarity
Research Article SGC Tests for Influence of Material Composition on Compaction Characteristic of Asphalt Mixtures
 The Scientific World Journal Volume 2013, Article ID 735640, 10 pages http://dx.doi.org/10.1155/2013/735640 Research Article SGC Tests for Influence of Material Composition on Compaction Characteristic
The Scientific World Journal Volume 2013, Article ID 735640, 10 pages http://dx.doi.org/10.1155/2013/735640 Research Article SGC Tests for Influence of Material Composition on Compaction Characteristic
Research Article A New Global Optimization Algorithm for Solving Generalized Geometric Programming
 Mathematical Problems in Engineering Volume 2010, Article ID 346965, 12 pages doi:10.1155/2010/346965 Research Article A New Global Optimization Algorithm for Solving Generalized Geometric Programming
Mathematical Problems in Engineering Volume 2010, Article ID 346965, 12 pages doi:10.1155/2010/346965 Research Article A New Global Optimization Algorithm for Solving Generalized Geometric Programming
Research Article Finite Iterative Algorithm for Solving a Complex of Conjugate and Transpose Matrix Equation
 indawi Publishing Corporation Discrete Mathematics Volume 013, Article ID 17063, 13 pages http://dx.doi.org/10.1155/013/17063 Research Article Finite Iterative Algorithm for Solving a Complex of Conjugate
indawi Publishing Corporation Discrete Mathematics Volume 013, Article ID 17063, 13 pages http://dx.doi.org/10.1155/013/17063 Research Article Finite Iterative Algorithm for Solving a Complex of Conjugate
Research Article Identifying a Global Optimizer with Filled Function for Nonlinear Integer Programming
 Discrete Dynamics in Nature and Society Volume 20, Article ID 7697, pages doi:0.55/20/7697 Research Article Identifying a Global Optimizer with Filled Function for Nonlinear Integer Programming Wei-Xiang
Discrete Dynamics in Nature and Society Volume 20, Article ID 7697, pages doi:0.55/20/7697 Research Article Identifying a Global Optimizer with Filled Function for Nonlinear Integer Programming Wei-Xiang
Delay-dependent stability and stabilization of neutral time-delay systems
 INTERNATIONAL JOURNAL OF ROBUST AND NONLINEAR CONTROL Int. J. Robust Nonlinear Control 2009; 19:1364 1375 Published online 6 October 2008 in Wiley InterScience (www.interscience.wiley.com)..1384 Delay-dependent
INTERNATIONAL JOURNAL OF ROBUST AND NONLINEAR CONTROL Int. J. Robust Nonlinear Control 2009; 19:1364 1375 Published online 6 October 2008 in Wiley InterScience (www.interscience.wiley.com)..1384 Delay-dependent
Research Article Indefinite LQ Control for Discrete-Time Stochastic Systems via Semidefinite Programming
 Mathematical Problems in Engineering Volume 2012, Article ID 674087, 14 pages doi:10.1155/2012/674087 Research Article Indefinite LQ Control for Discrete-Time Stochastic Systems via Semidefinite Programming
Mathematical Problems in Engineering Volume 2012, Article ID 674087, 14 pages doi:10.1155/2012/674087 Research Article Indefinite LQ Control for Discrete-Time Stochastic Systems via Semidefinite Programming
Chapter 3. State Feedback - Pole Placement. Motivation
 Chapter 3 State Feedback - Pole Placement Motivation Whereas classical control theory is based on output feedback, this course mainly deals with control system design by state feedback. This model-based
Chapter 3 State Feedback - Pole Placement Motivation Whereas classical control theory is based on output feedback, this course mainly deals with control system design by state feedback. This model-based
Research Article A Note on Taylor-Eddy and Kovasznay Solutions of NS-α-Deconvolution and Leray-α-Deconvolution Models
 Nonlinear Dynamics, Article ID 959038, 5 pages http://dx.doi.org/10.1155/2014/959038 Research Article A Note on Taylor-Eddy and Kovasznay Solutions of NS-α-Deconvolution and Leray-α-Deconvolution Models
Nonlinear Dynamics, Article ID 959038, 5 pages http://dx.doi.org/10.1155/2014/959038 Research Article A Note on Taylor-Eddy and Kovasznay Solutions of NS-α-Deconvolution and Leray-α-Deconvolution Models
Research Article Extended Precise Large Deviations of Random Sums in the Presence of END Structure and Consistent Variation
 Applied Mathematics Volume 2012, Article ID 436531, 12 pages doi:10.1155/2012/436531 Research Article Extended Precise Large Deviations of Random Sums in the Presence of END Structure and Consistent Variation
Applied Mathematics Volume 2012, Article ID 436531, 12 pages doi:10.1155/2012/436531 Research Article Extended Precise Large Deviations of Random Sums in the Presence of END Structure and Consistent Variation
Research Article Emissivity Measurement of Semitransparent Textiles
 Advances in Optical Technologies Volume 2012, Article ID 373926, 5 pages doi:10.1155/2012/373926 Research Article Emissivity Measurement of Semitransparent Textiles P. Bison, A. Bortolin, G. Cadelano,
Advances in Optical Technologies Volume 2012, Article ID 373926, 5 pages doi:10.1155/2012/373926 Research Article Emissivity Measurement of Semitransparent Textiles P. Bison, A. Bortolin, G. Cadelano,
Stability of linear time-varying systems through quadratically parameter-dependent Lyapunov functions
 Stability of linear time-varying systems through quadratically parameter-dependent Lyapunov functions Vinícius F. Montagner Department of Telematics Pedro L. D. Peres School of Electrical and Computer
Stability of linear time-varying systems through quadratically parameter-dependent Lyapunov functions Vinícius F. Montagner Department of Telematics Pedro L. D. Peres School of Electrical and Computer
Linear Matrix Inequality (LMI)
") Linear Matrix Inequality (LMI) A linear matrix inequality is an expression of the form where F (x) F 0 + x 1 F 1 + + x m F m > 0 (1) x = (x 1,, x m ) R m, F 0,, F m are real symmetric matrices, and the
Linear Matrix Inequality (LMI) A linear matrix inequality is an expression of the form where F (x) F 0 + x 1 F 1 + + x m F m > 0 (1) x = (x 1,, x m ) R m, F 0,, F m are real symmetric matrices, and the
Research Article Stabilization Analysis and Synthesis of Discrete-Time Descriptor Markov Jump Systems with Partially Unknown Transition Probabilities
 Research Journal of Applied Sciences, Engineering and Technology 7(4): 728-734, 214 DOI:1.1926/rjaset.7.39 ISSN: 24-7459; e-issn: 24-7467 214 Maxwell Scientific Publication Corp. Submitted: February 25,
Research Journal of Applied Sciences, Engineering and Technology 7(4): 728-734, 214 DOI:1.1926/rjaset.7.39 ISSN: 24-7459; e-issn: 24-7467 214 Maxwell Scientific Publication Corp. Submitted: February 25,
Research Article Adaptive Control of Chaos in Chua s Circuit
 Mathematical Problems in Engineering Volume 2011, Article ID 620946, 14 pages doi:10.1155/2011/620946 Research Article Adaptive Control of Chaos in Chua s Circuit Weiping Guo and Diantong Liu Institute
Mathematical Problems in Engineering Volume 2011, Article ID 620946, 14 pages doi:10.1155/2011/620946 Research Article Adaptive Control of Chaos in Chua s Circuit Weiping Guo and Diantong Liu Institute
Research Article Remarks on the Regularity Criterion of the Navier-Stokes Equations with Nonlinear Damping
 Mathematical Problems in Engineering Volume 15, Article ID 194, 5 pages http://dx.doi.org/1.1155/15/194 Research Article Remarks on the Regularity Criterion of the Navier-Stokes Equations with Nonlinear
Mathematical Problems in Engineering Volume 15, Article ID 194, 5 pages http://dx.doi.org/1.1155/15/194 Research Article Remarks on the Regularity Criterion of the Navier-Stokes Equations with Nonlinear
Linear Systems with Saturating Controls: An LMI Approach. subject to control saturation. No assumption is made concerning open-loop stability and no
 Output Feedback Robust Stabilization of Uncertain Linear Systems with Saturating Controls: An LMI Approach Didier Henrion 1 Sophie Tarbouriech 1; Germain Garcia 1; Abstract : The problem of robust controller
Output Feedback Robust Stabilization of Uncertain Linear Systems with Saturating Controls: An LMI Approach Didier Henrion 1 Sophie Tarbouriech 1; Germain Garcia 1; Abstract : The problem of robust controller
State feedback gain scheduling for linear systems with time-varying parameters
 State feedback gain scheduling for linear systems with time-varying parameters Vinícius F. Montagner and Pedro L. D. Peres Abstract This paper addresses the problem of parameter dependent state feedback
State feedback gain scheduling for linear systems with time-varying parameters Vinícius F. Montagner and Pedro L. D. Peres Abstract This paper addresses the problem of parameter dependent state feedback
Lecture Note 5: Semidefinite Programming for Stability Analysis
 ECE7850: Hybrid Systems:Theory and Applications Lecture Note 5: Semidefinite Programming for Stability Analysis Wei Zhang Assistant Professor Department of Electrical and Computer Engineering Ohio State
ECE7850: Hybrid Systems:Theory and Applications Lecture Note 5: Semidefinite Programming for Stability Analysis Wei Zhang Assistant Professor Department of Electrical and Computer Engineering Ohio State
Research Article Rota-Baxter Operators on 3-Dimensional Lie Algebras and the Classical R-Matrices
 Hindawi Advances in Mathematical Physics Volume 07, Article ID 680, 7 pages https://doi.org/0.55/07/680 Research Article Rota-Baxter Operators on 3-Dimensional Lie Algebras and the Classical R-Matrices
Hindawi Advances in Mathematical Physics Volume 07, Article ID 680, 7 pages https://doi.org/0.55/07/680 Research Article Rota-Baxter Operators on 3-Dimensional Lie Algebras and the Classical R-Matrices
Research Article Some Results on Characterizations of Matrix Partial Orderings
 Applied Mathematics, Article ID 408457, 6 pages http://dx.doi.org/10.1155/2014/408457 Research Article Some Results on Characterizations of Matrix Partial Orderings Hongxing Wang and Jin Xu Department
Applied Mathematics, Article ID 408457, 6 pages http://dx.doi.org/10.1155/2014/408457 Research Article Some Results on Characterizations of Matrix Partial Orderings Hongxing Wang and Jin Xu Department
Research Article Sliding Mode Control for the Synchronous Generator
 ISRN Applied Mathematics Volume 014, Article ID 56504, 7 pages http://dx.doi.org/10.1155/014/56504 Research Article Sliding Mode Control for the Synchronous Generator Yaote Chang and Chih-Chin Wen Department
ISRN Applied Mathematics Volume 014, Article ID 56504, 7 pages http://dx.doi.org/10.1155/014/56504 Research Article Sliding Mode Control for the Synchronous Generator Yaote Chang and Chih-Chin Wen Department
Research Article Thermal Analysis of Air-Core Power Reactors
 ISRN Mechanical Engineering Volume 213, Article ID 86515, 6 pages http://dx.doi.org/1.1155/213/86515 Research Article Thermal Analysis of Air-Core Power Reactors Zhao Yuan, Jun-jia He, Yuan Pan, Xiao-gen
ISRN Mechanical Engineering Volume 213, Article ID 86515, 6 pages http://dx.doi.org/1.1155/213/86515 Research Article Thermal Analysis of Air-Core Power Reactors Zhao Yuan, Jun-jia He, Yuan Pan, Xiao-gen
Research Article A Matrix Method Based on the Fibonacci Polynomials to the Generalized Pantograph Equations with Functional Arguments
 Advances in Mathematical Physics, Article ID 694580, 5 pages http://dx.doi.org/10.1155/2014/694580 Research Article A Matrix Method Based on the Fibonacci Polynomials to the Generalized Pantograph Equations
Advances in Mathematical Physics, Article ID 694580, 5 pages http://dx.doi.org/10.1155/2014/694580 Research Article A Matrix Method Based on the Fibonacci Polynomials to the Generalized Pantograph Equations
Robust Output Feedback Controller Design via Genetic Algorithms and LMIs: The Mixed H 2 /H Problem
 Robust Output Feedback Controller Design via Genetic Algorithms and LMIs: The Mixed H 2 /H Problem Gustavo J. Pereira and Humberto X. de Araújo Abstract This paper deals with the mixed H 2/H control problem
Robust Output Feedback Controller Design via Genetic Algorithms and LMIs: The Mixed H 2 /H Problem Gustavo J. Pereira and Humberto X. de Araújo Abstract This paper deals with the mixed H 2/H control problem
Research Article An Iterative Algorithm for the Split Equality and Multiple-Sets Split Equality Problem
 Abstract and Applied Analysis, Article ID 60813, 5 pages http://dx.doi.org/10.1155/014/60813 Research Article An Iterative Algorithm for the Split Equality and Multiple-Sets Split Equality Problem Luoyi
Abstract and Applied Analysis, Article ID 60813, 5 pages http://dx.doi.org/10.1155/014/60813 Research Article An Iterative Algorithm for the Split Equality and Multiple-Sets Split Equality Problem Luoyi
Research Article Calculation for Primary Combustion Characteristics of Boron-Based Fuel-Rich Propellant Based on BP Neural Network
 Combustion Volume 2012, Article ID 635190, 6 pages doi:10.1155/2012/635190 Research Article Calculation for Primary Combustion Characteristics of Boron-Based Fuel-Rich Propellant Based on BP Neural Network
Combustion Volume 2012, Article ID 635190, 6 pages doi:10.1155/2012/635190 Research Article Calculation for Primary Combustion Characteristics of Boron-Based Fuel-Rich Propellant Based on BP Neural Network
Robust multi objective H2/H Control of nonlinear uncertain systems using multiple linear model and ANFIS
 Robust multi objective H2/H Control of nonlinear uncertain systems using multiple linear model and ANFIS Vahid Azimi, Member, IEEE, Peyman Akhlaghi, and Mohammad Hossein Kazemi Abstract This paper considers
Robust multi objective H2/H Control of nonlinear uncertain systems using multiple linear model and ANFIS Vahid Azimi, Member, IEEE, Peyman Akhlaghi, and Mohammad Hossein Kazemi Abstract This paper considers
Research Article H Control Theory Using in the Air Pollution Control System
 Mathematical Problems in Engineering Volume 2013, Article ID 145396, 5 pages http://dx.doi.org/10.1155/2013/145396 Research Article H Control Theory Using in the Air Pollution Control System Tingya Yang,
Mathematical Problems in Engineering Volume 2013, Article ID 145396, 5 pages http://dx.doi.org/10.1155/2013/145396 Research Article H Control Theory Using in the Air Pollution Control System Tingya Yang,
Research Article Completing a 2 2Block Matrix of Real Quaternions with a Partial Specified Inverse
 Applied Mathematics Volume 0, Article ID 7978, 5 pages http://dx.doi.org/0.55/0/7978 Research Article Completing a Block Matrix of Real Quaternions with a Partial Specified Inverse Yong Lin, and Qing-Wen
Applied Mathematics Volume 0, Article ID 7978, 5 pages http://dx.doi.org/0.55/0/7978 Research Article Completing a Block Matrix of Real Quaternions with a Partial Specified Inverse Yong Lin, and Qing-Wen
On parameter-dependent Lyapunov functions for robust stability of linear systems
 On parameter-dependent Lyapunov functions for robust stability of linear systems Didier Henrion, Denis Arzelier, Dimitri Peaucelle, Jean-Bernard Lasserre Abstract For a linear system affected by real parametric
On parameter-dependent Lyapunov functions for robust stability of linear systems Didier Henrion, Denis Arzelier, Dimitri Peaucelle, Jean-Bernard Lasserre Abstract For a linear system affected by real parametric
Research Article Localization and Perturbations of Roots to Systems of Polynomial Equations
 International Mathematics and Mathematical Sciences Volume 2012, Article ID 653914, 9 pages doi:10.1155/2012/653914 Research Article Localization and Perturbations of Roots to Systems of Polynomial Equations
International Mathematics and Mathematical Sciences Volume 2012, Article ID 653914, 9 pages doi:10.1155/2012/653914 Research Article Localization and Perturbations of Roots to Systems of Polynomial Equations
ON THE ROBUST STABILITY OF NEUTRAL SYSTEMS WITH TIME-VARYING DELAYS
 ON THE ROBUST STABILITY OF NEUTRAL SYSTEMS WITH TIME-VARYING DELAYS V. J. S. Leite P. L. D. Peres E. B. Castelan S. Tarbouriech UnED Divinópolis CEFET-MG R. Monte Santo, 319 35502-036, Divinópolis - MG
ON THE ROBUST STABILITY OF NEUTRAL SYSTEMS WITH TIME-VARYING DELAYS V. J. S. Leite P. L. D. Peres E. B. Castelan S. Tarbouriech UnED Divinópolis CEFET-MG R. Monte Santo, 319 35502-036, Divinópolis - MG
IMPROVED MPC DESIGN BASED ON SATURATING CONTROL LAWS
 IMPROVED MPC DESIGN BASED ON SATURATING CONTROL LAWS D. Limon, J.M. Gomes da Silva Jr., T. Alamo and E.F. Camacho Dpto. de Ingenieria de Sistemas y Automática. Universidad de Sevilla Camino de los Descubrimientos
IMPROVED MPC DESIGN BASED ON SATURATING CONTROL LAWS D. Limon, J.M. Gomes da Silva Jr., T. Alamo and E.F. Camacho Dpto. de Ingenieria de Sistemas y Automática. Universidad de Sevilla Camino de los Descubrimientos
Multi-Model Adaptive Regulation for a Family of Systems Containing Different Zero Structures
 Preprints of the 19th World Congress The International Federation of Automatic Control Multi-Model Adaptive Regulation for a Family of Systems Containing Different Zero Structures Eric Peterson Harry G.
Preprints of the 19th World Congress The International Federation of Automatic Control Multi-Model Adaptive Regulation for a Family of Systems Containing Different Zero Structures Eric Peterson Harry G.
Research Article Asymptotic Behavior of the Solutions of System of Difference Equations of Exponential Form
 Difference Equations Article ID 936302 6 pages http://dx.doi.org/10.1155/2014/936302 Research Article Asymptotic Behavior of the Solutions of System of Difference Equations of Exponential Form Vu Van Khuong
Difference Equations Article ID 936302 6 pages http://dx.doi.org/10.1155/2014/936302 Research Article Asymptotic Behavior of the Solutions of System of Difference Equations of Exponential Form Vu Van Khuong
Research Article Noncontact Measurement for Radius of Curvature of Unpolished Lens
 International Optics, Article ID 3403, 7 pages http://dx.doi.org/10.1155/014/3403 Research Article Noncontact Measurement for Radius of Curvature of Unpolished Lens Haifeng Liang College of Photoelectrical
International Optics, Article ID 3403, 7 pages http://dx.doi.org/10.1155/014/3403 Research Article Noncontact Measurement for Radius of Curvature of Unpolished Lens Haifeng Liang College of Photoelectrical