DM545 Linear and Integer Programming. The Simplex Method. Marco Chiarandini
|
|
|
- Rachel Waters
- 5 years ago
- Views:
Transcription
1 DM545 Linear and Integer Programming The Simplex Method Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark
2 Outline 1. Diet Problem 2. Fourier-Motzkin method 3. Fundamental Theorem of LP Gaussian Elimination 2
3 Outline 1. Diet Problem 2. Fourier-Motzkin method 3. Fundamental Theorem of LP Gaussian Elimination 3
4 Outline 1. Diet Problem 2. Fourier-Motzkin method 3. Fundamental Theorem of LP Gaussian Elimination 4
 min cost/weight subject to nutrition requirements:")
5 The Diet Problem (Blending Problems) Select a set of foods that will satisfy a set of daily nutritional requirement at minimum cost. Motivated in the 1930s and 1940s by US army. Formulated as a linear programming problem by George Stigler First linear programming problem (programming intended as planning not computer code) min cost/weight subject to nutrition requirements: eat enough but not too much of Vitamin A eat enough but not too much of Sodium eat enough but not too much of Calories... 5
6 The Diet Problem Suppose there are: 3 foods available, corn, milk, and bread, and there are restrictions on the number of calories (between 2000 and 2250) and the amount of Vitamin A (between 5,000 and 50,000) Food Cost per serving Vitamin A Calories Corn $ % Milk $ Wheat Bread $
7 The Mathematical Model Parameters (given data) F = set of foods N = set of nutrients a ij = amount of nutrient j in food i, i F, j N c i = cost per serving of food i, i F F mini = minimum number of required servings of food i, i F F maxi = maximum allowable number of servings of food i, i F N minj = minimum required level of nutrient j, j N N maxj = maximum allowable level of nutrient j, j N Decision Variables x i = number of servings of food i to purchase/consume, i F 7
8 The Mathematical Model Objective Function: Minimize the total cost of the food Minimize i F c i x i Constraint Set 1: For each nutrient j N, at least meet the minimum required level a ij x i N minj, j N i F Constraint Set 2: For each nutrient j N, do not exceed the maximum allowable level. a ij x i N maxj, j N i F Constraint Set 3: For each food i F, select at least the minimum required number of servings x i F mini, i F Constraint Set 4: For each food i F, do not exceed the maximum allowable number of servings. x i F maxi, i F 8
9 The Mathematical Model system of equalities and inequalities min c i x i i F a ij x i N minj, i F a ij x i N maxj, i F x i F mini, x i F maxi, j N j N i F i F 9
10 Mathematical Model Graphical Representation: Machines/Materials A and B Products 1 and 2 x 2 max 6x 1 + 8x 2 5x x x 1 + 4x 2 40 x 1 0 x 2 0 6x 1 + 8x 2 = 16 5x x 2 60 x 1 4x 1 + 4x
11 In Matrix Form max c 1 x 1 + c 2 x 2 + c 3 x c n x n = z s.t. a 11 x 1 + a 12 x 2 + a 13 x a 1n x n b 1 a 21 x 1 + a 22 x 2 + a 23 x a 2n x n b 2... a m1 x 1 + a m2 x 2 + a m3 x a mn x n b m x 1, x 2,..., x n 0 c 1 a 11 a a 1n x 1 b 1 c 2 c =., A = a 21 a a 2n......, x = x 2., b = b 2. c n a m1 a m2... a mn x n b m max z = c T x Ax b x 0 11
12 Linear Programming Abstract mathematical model: Parameters, Decision Variables, Objective, Constraints (+ Domains & Quantifiers) The Syntax of a Linear Programming Problem objective func. max / min c T x c R n constraints s.t. A x b A R m n, b R m x 0 x R n, 0 R n Essential features: continuity, linearity (proportionality and additivity), certainty of parameters Any vector x R n satisfying all constraints is a feasible solution. Each x R n that gives the best possible value for c T x among all feasible x is an optimal solution or optimum The value c T x is the optimum value 12
13 The linear programming model consisted of 9 equations in 77 variables Stigler, guessed an optimal solution using a heuristic method In 1947, the National Bureau of Standards used the newly developed simplex method to solve Stigler s model. It took 9 clerks using hand-operated desk calculators 120 man days to solve for the optimal solution The original instance: 13
14 AMPL Model # diet.mod set NUTR; set FOOD; param cost {FOOD} > 0; param f_min {FOOD} >= 0; param f_max { i in FOOD} >= f_min[i]; param n_min { NUTR } >= 0; param n_max {j in NUTR } >= n_min[j]; param amt {NUTR,FOOD} >= 0; var Buy { i in FOOD} >= f_min[i], <= f_max[i] minimize total_cost: sum { i in FOOD } cost [i] Buy[i]; subject to diet { j in NUTR }: n_min[j] <= sum {i in FOOD} amt[i,j] Buy[i] <= n_max[j]; 14
15 AMPL Model # diet.dat data; set NUTR := A B1 B2 C ; set FOOD := BEEF CHK FISH HAM MCH MTL SPG TUR; param: cost f_min f_max := BEEF CHK FISH HAM MCH MTL SPG TUR ; param amt (tr): A C B1 B2 := BEEF CHK FISH HAM MCH MTL SPG TUR ; param: n_min n_max := A C B B ; # % 15
16 Python Script Data from gurobipy import categories, minnutrition, maxnutrition = multidict({ calories : [1800, 2200], protein : [91, GRB.INFINITY], fat : [0, 65], sodium : [0, 1779] }) foods, cost = multidict({ hamburger : 2.49, chicken : 2.89, hot dog : 1.50, fries : 1.89, macaroni : 2.09, pizza : 1.99, salad : 2.49, milk : 0.89, ice cream : 1.59 }) # Nutrition values for the foods nutritionvalues = { ( hamburger, calories ): 410, ( hamburger, protein ): 24, ( hamburger, fat ): 26, ( hamburger, sodium ): 730, ( chicken, calories ): 420, ( chicken, protein ): 32, ( chicken, fat ): 10, ( chicken, sodium ): 1190, ( hot dog, calories ): 560, ( hot dog, protein ): 20, ( hot dog, fat ): 32, ( hot dog, sodium ): 1800, ( fries, calories ): 380, ( fries, protein ): 4, ( fries, fat ): 19, ( fries, sodium ): 270, ( macaroni, calories ): 320, ( macaroni, protein ): 12, ( macaroni, fat ): 10, ( macaroni, sodium ): 930, ( pizza, calories ): 320, ( pizza, protein ): 15, ( pizza, fat ): 12, ( pizza, sodium ): 820, ( salad, calories ): 320, ( salad, protein ): 31, 16
17 # Model diet.py m = Model("diet") # Create decision variables for the foods to buy buy = {} for f in foods: buy[f] = m.addvar(obj=cost[f], name=f) # The objective is to minimize the costs m.modelsense = GRB.MINIMIZE # Update model to integrate new variables m.update() # Nutrition constraints for c in categories: m.addconstr( quicksum(nutritionvalues[f,c] buy[f] for f in foods) <= maxnutrition[c], name=c+ max ) m.addconstr( quicksum(nutritionvalues[f,c] buy[f] for f in foods) >= minnutrition[c], name=c+ min ) # Solve m.optimize() 17
18 Outline 1. Diet Problem 2. Fourier-Motzkin method 3. Fundamental Theorem of LP Gaussian Elimination 17
19 History of Linear Programming (LP) System of linear equations It is impossible to find out who knew what when first. Just two "references": Egyptians and Babylonians considered about 2000 B.C. the solution of special linear equations. But, of course, they described examples and did not describe the methods in "today s style". What we call "Gaussian elimination"today has been explicitly described in Chinese "Nine Books of Arithmetic"which is a compendium written in the period 2010 B.C. to A.D. 9, but the methods were probably known long before that. Gauss, by the way, never described "Gaussian elimination". He just used it and stated that the linear equations he used can be solved "per eliminationem vulgarem" 18
20 History of Linear Programming (LP) Origins date back to Newton, Leibnitz, Lagrange, etc. In 1827, Fourier described a variable elimination method for systems of linear inequalities, today often called Fourier-Moutzkin elimination (Motzkin, 1937). It can be turned into an LP solver but inefficient. In 1932, Leontief ( ) Input-Output model to represent interdependencies between branches of a national economy (1976 Nobel prize) In 1939, Kantorovich ( ): Foundations of linear programming (Nobel prize in economics with Koopmans on LP, 1975) on Optimal use of scarce resources: foundation and economic interpretation of LP The math subfield of Linear Programming was created by George Dantzig, John von Neumann (Princeton), and Leonid Kantorovich in the 1940s. In 1947, Dantzig ( ) invented the (primal) simplex algorithm working for the US Air Force at the Pentagon. (program=plan) 19
21 History of LP (cntd) In 1954, Lemke: dual simplex algorithm, In 1954, Dantzig and Orchard Hays: revised simplex algorithm In 1970, Victor Klee and George Minty created an example that showed that the classical simplex algorithm has exponential worst-case behavior. In 1979, L. Khachain found a new efficient algorithm for linear programming. It was terribly slow. (Ellipsoid method) In 1984, Karmarkar discovered yet another new efficient algorithm for linear programming. It proved to be a strong competitor for the simplex method. (Interior point method) 20
22 History of Optimization In 1951, Nonlinear Programming began with the Karush-Kuhn-Tucker Conditions In 1952, Commercial Applications and Software began In 1950s, Network Flow Theory began with the work of Ford and Fulkerson. In 1955, Stochastic Programming began In 1958, Integer Programming began by R. E. Gomory. In 1962, Complementary Pivot Theory 21
23 Outline 1. Diet Problem 2. Fourier-Motzkin method 3. Fundamental Theorem of LP Gaussian Elimination 22
24 Fourier Motzkin elimination method Has Ax b a solution? (Assumption: A Q m n, b Q n ) Idea: 1. transform the system into another by eliminating some variables such that the two systems have the same solutions over the remaining variables. 2. reduce to a system of constant inequalities that can be easily decided Let x r be the variable to eliminate Let M = {1... m} index the constraints For a variable j let partition the rows of the matrix in N = {i M a ij < 0} Z = {i M a ij = 0} P = {i M a ij > 0} 23
25 after d iterations if P = N = m/2 exponential growth: 1/4(m/2) 2d 24 x r b ir r 1 k=1 a ik x k, a ir < 0 x r b ir r 1 k=1 a ik x k, a ir > 0 all other constraints i Z x r A i (x 1,..., x r 1 ), i N x r B i (x 1,..., x r 1 ), i P all other constraints i Z Hence the original system is equivalent to { max{ai (x 1,..., x r 1 ), i N} x r min{b i (x 1,..., x r 1 ), i P} all other constraints i Z which is equivalent to { Ai (x 1,..., x r 1 ) B j (x 1,..., x r 1 ) i N, j P all other constraints i Z we eliminated x r but: { N P inequalities Z inequalities
26 Example 7x 1 + 6x 2 25 x 1 5x 2 1 x 1 7 x 1 + 2x 2 12 x 1 3x 2 1 2x 1 x 2 10 x 2 variable to eliminate N = {2, 5, 6}, Z = {3}, P = {1, 4} Z (N P) = 7 constraints By adding one variable and one inequality, Fourier-Motzkin elimination can be turned into an LP solver. 25
27 Outline 1. Diet Problem 2. Fourier-Motzkin method 3. Fundamental Theorem of LP Gaussian Elimination 26
28 Definitions R: set of real numbers N = {1, 2, 3, 4,...}: set of natural numbers (positive integers) Z = {..., 3, 2, 1, 0, 1, 2, 3,...}: set of all integers Q = {p/q p, q Z, q 0}: set of rational numbers column vector and matrices scalar product: y T x = n i=1 y ix i linear combination v 1, v 2..., v k R n λ = [λ 1,..., λ k ] T R k x = λ 1 v λ k v k = moreover: λ 0 λ T 1 = 1 λ 0 and λ T 1 = 1 conic combination affine combination convex combination k λ i v i i=1 ( k ) λ i = 1 i=1 27

29 Definitions set S is linear (affine) independent if no element of it can be expressed as linear combination of the others Eg: S R n = max n lin. indep. (max n + 1 aff. indep.) convex set: if x, y S and 0 λ 1 then λx + (1 λ)y S convex function if its epigraph {(x, y) R 2 : y f (x)} is a convex set or f : X R, if x, y X, λ [0, 1] it holds that f (λx + (1 λ)y) λf (x) + (1 λ)f (y) 28
30 Definitions For a set of points S R n lin(s) linear hull (span) cone(s) conic hull aff(s) affine hull conv(s) convex hull conv(x ) = {λ 1x 1 + λ 2x λ nx n x i X, λ 1,..., λ n 0 and i λ i = 1} 29
31 Definitions rank of a matrix for columns (= for rows) if (m, n)-matrix has rank = min{m, n} then the matrix is full rank if (n, n)-matrix is full rank then it is regular and admits an inverse G R n is an hyperplane if a R n \ {0} and α R: G = {x R n a T x = α} H R n is an halfspace if a R n \ {0} and α R: H = {x R n a T x α} (a T x = α is a supporting hyperplane of H) 30
32 Definitions a set S R n is a polyhedron if m Z +, A R m n, b R m : m P = {x R Ax b} = {x R n A i x b i } i=1 a polyhedron P is a polytope if it is bounded: B R, B > 0: P {x R n x B} Theorem: every polyhedron P R n is determined by finitely many halfspaces 31
33 Definitions General optimization problem: max{ϕ(x) x F }, F is feasible region for x Note: if F is open, eg, x < 5 then: sup{x x < 5} sumpreum: least element of R greater or equal than any element in F If A and b are made of rational numbers, P = {x R n Ax b} is a rational polyhedron 32
34 Definitions The inequality denoted by (a, α) is called a valid inequality for P if ax α, x P. Note that (a, α) is a valid inequality if and only if P lies in the half-space {x R n ax α}. A face of P is F = {x P ax = α} where (a, α) is a valid inequality for P. Hence, it is the intersection of P with the hyperplane of a valid inequality. It is said to be proper if F and F P. If F we say that it supports P. A point x for which {x} is a face is called a vertex of P and also a basic solution of Ax b (0 dim face) A facet is a maximal face distinct from P cx d is facet defining if cx = d is a supporting hyperplane of P (n 1 dim face) 33
35 Linear Programming Problem Input: a matrix A R m n and column vectors b R m, c R n Task: 1. decide that {x R n ; Ax b} is empty (prob. infeasible), or 2. find a column vector x R n such that Ax b and c T x is max, or 3. decide that for all α R there is an x R n with Ax b and c T x > α (prob. unbounded) 1. F = 2. F and solution 1. one solution 2. infinite solution 3. F and solution 34
36 Linear Programming and Linear Algebra Linear algebra: linear equations (Gaussian elimination) Integer linear algebra: linear diophantine equations Linear programming: linear inequalities (simplex method) Integer linear programming: linear diophantine inequalities 35
37 Outline 1. Diet Problem 2. Fourier-Motzkin method 3. Fundamental Theorem of LP Gaussian Elimination 36
38 Fundamental Theorem of LP Theorem (Fundamental Theorem of Linear Programming) Given: min{c T x x P} where P = {x R n Ax b} If P is a bounded polyhedron and not empty and x is an optimal solution to the problem, then: x is an extreme point (vertex) of P, or x lies on a face F P of optimal solution Proof idea: assume x not a vertex of P then a ball around it still in P. Show that a point in the ball has better cost if x is not a vertex then it is a convex combination of vertices. Show that all points are also optimal. 37
39 Implications: the optimal solution is at the intersection of hyperplanes supporting halfspaces. hence finitely many possibilities Solution method: write all inequalities as equalities and solve all ( ) n m systems of linear equalities (n # variables, m # equality constraints) for each point we then need to check if feasible and if best in cost. each system is solved by Gaussian elimination Stirling approximation: ( ) 2m 4m as m m πm 38
40 Simplex Method 1. find a solution that is at the intersection of some n hyperplanes 2. try systematically to produce the other points by exchanging one hyperplane with another 3. check optimality, proof provided by duality theory 39
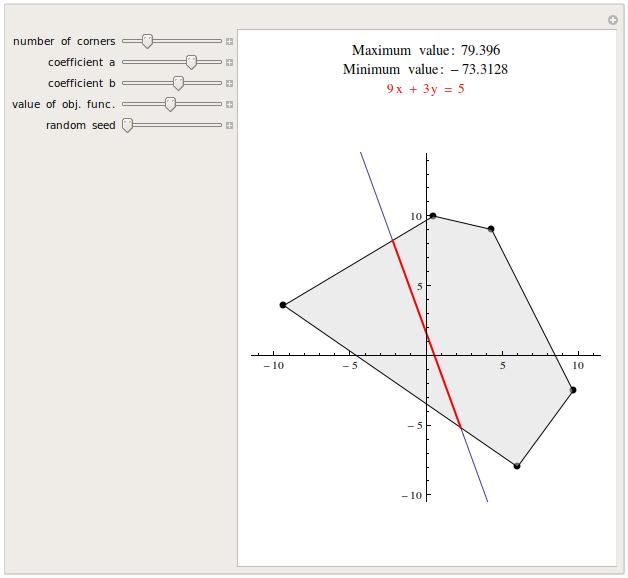
41 Demo 40
42 Outline 1. Diet Problem 2. Fourier-Motzkin method 3. Fundamental Theorem of LP Gaussian Elimination 41
43 Gaussian Elimination 1. Forward elimination reduces the system to row echelon form by elementary row operations multiply a row by a non-zero constant interchange two rows add a multiple of one row to anothe (or LU decomposition) 2. Back substitution (or reduced row echelon form - RREF) 42
44 Example 2x + y z = 8 (R1) 3x y + 2z = 11 (R2) 2x + y + 2z = 3 (R3) 2x + y z = 8 (R1) y z = 1 (R2) + 2y + 1z = 5 (R3) 2x + y z = 8 (R1) y z = 1 (R2) z = 1 (R3) 2x + y z = 8 (R1) y z = 1 (R2) z = 1 (R3) x = 2 (R1) y = 3 (R2) z = 1 (R3) R R R R1 =1/2 R1 1 1/2-1/2 4 R2 =R2+3/2 R1 0 1/2 1/2 1 R3 =R3+R R1 =R1 1 1/2-1/2 4 R2 =2 R R3 =R3-4 R R1 =R1-1/2 R3 1 1/2 0 7/2 R2 =R2+R R3 =-R R1 =R1-1/2 R => x=2 R2 =R => y=3 R3 =R => z=
45 In Python reduced row-echelon form of matrix and indices of pivot vars 44
46 LU Factorization x y = z 3 Ax = b x = A 1 b u 11 u 12 u = l u 22 u l 31 l u 33 A = PLU x = A 1 b = U 1 L 1 P T b z 1 = P T b, z 2 = L 1 z 1, x = U 1 z 2 45
47 Polynomial time O(n 2 m) but needs to guarantee that all the numbers during the run can be represented by polynomially bounded bits 46
48 Summary 1. Diet Problem 2. Fourier-Motzkin method 3. Fundamental Theorem of LP Gaussian Elimination 47
DM559/DM545 Linear and Integer Programming. Linear Programming. Marco Chiarandini
 DM559/DM545 Linear and Integer Programming Linear Programming Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark Outline 1. Diet Problem 2. Fourier-Motzkin method
DM559/DM545 Linear and Integer Programming Linear Programming Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark Outline 1. Diet Problem 2. Fourier-Motzkin method
Math 5593 Linear Programming Week 1
 University of Colorado Denver, Fall 2013, Prof. Engau 1 Problem-Solving in Operations Research 2 Brief History of Linear Programming 3 Review of Basic Linear Algebra Linear Programming - The Story About
University of Colorado Denver, Fall 2013, Prof. Engau 1 Problem-Solving in Operations Research 2 Brief History of Linear Programming 3 Review of Basic Linear Algebra Linear Programming - The Story About
Resource Constrained Project Scheduling Linear and Integer Programming (1)
") DM204, 2010 SCHEDULING, TIMETABLING AND ROUTING Lecture 3 Resource Constrained Project Linear and Integer Programming (1) Marco Chiarandini Department of Mathematics & Computer Science University of Southern
DM204, 2010 SCHEDULING, TIMETABLING AND ROUTING Lecture 3 Resource Constrained Project Linear and Integer Programming (1) Marco Chiarandini Department of Mathematics & Computer Science University of Southern
Outline. Outline. Outline DMP204 SCHEDULING, TIMETABLING AND ROUTING. 1. Scheduling CPM/PERT Resource Constrained Project Scheduling Model
 Outline DMP204 SCHEDULING, TIMETABLING AND ROUTING Lecture 3 and Mixed Integer Programg Marco Chiarandini 1. Resource Constrained Project Model 2. Mathematical Programg 2 Outline Outline 1. Resource Constrained
Outline DMP204 SCHEDULING, TIMETABLING AND ROUTING Lecture 3 and Mixed Integer Programg Marco Chiarandini 1. Resource Constrained Project Model 2. Mathematical Programg 2 Outline Outline 1. Resource Constrained
MS-E2140. Lecture 1. (course book chapters )
") Linear Programming MS-E2140 Motivations and background Lecture 1 (course book chapters 1.1-1.4) Linear programming problems and examples Problem manipulations and standard form problems Graphical representation
Linear Programming MS-E2140 Motivations and background Lecture 1 (course book chapters 1.1-1.4) Linear programming problems and examples Problem manipulations and standard form problems Graphical representation
MS-E2140. Lecture 1. (course book chapters )
") Linear Programming MS-E2140 Motivations and background Lecture 1 (course book chapters 1.1-1.4) Linear programming problems and examples Problem manipulations and standard form Graphical representation
Linear Programming MS-E2140 Motivations and background Lecture 1 (course book chapters 1.1-1.4) Linear programming problems and examples Problem manipulations and standard form Graphical representation
Linear Programming. Leo Liberti. LIX, École Polytechnique. Operations research courses / LP theory p.
 Operations research courses / LP theory p. 1/47 Linear Programming Leo Liberti LIX, École Polytechnique liberti@lix.polytechnique.fr Operations research courses / LP theory p. 2/47 Contents LP formulations
Operations research courses / LP theory p. 1/47 Linear Programming Leo Liberti LIX, École Polytechnique liberti@lix.polytechnique.fr Operations research courses / LP theory p. 2/47 Contents LP formulations
Optimization WS 13/14:, by Y. Goldstein/K. Reinert, 9. Dezember 2013, 16: Linear programming. Optimization Problems
 Optimization WS 13/14:, by Y. Goldstein/K. Reinert, 9. Dezember 2013, 16:38 2001 Linear programming Optimization Problems General optimization problem max{z(x) f j (x) 0,x D} or min{z(x) f j (x) 0,x D}
Optimization WS 13/14:, by Y. Goldstein/K. Reinert, 9. Dezember 2013, 16:38 2001 Linear programming Optimization Problems General optimization problem max{z(x) f j (x) 0,x D} or min{z(x) f j (x) 0,x D}
Lecture 10: Linear programming duality and sensitivity 0-0
 Lecture 10: Linear programming duality and sensitivity 0-0 The canonical primal dual pair 1 A R m n, b R m, and c R n maximize z = c T x (1) subject to Ax b, x 0 n and minimize w = b T y (2) subject to
Lecture 10: Linear programming duality and sensitivity 0-0 The canonical primal dual pair 1 A R m n, b R m, and c R n maximize z = c T x (1) subject to Ax b, x 0 n and minimize w = b T y (2) subject to
CS711008Z Algorithm Design and Analysis
 CS711008Z Algorithm Design and Analysis Lecture 8 Linear programming: interior point method Dongbo Bu Institute of Computing Technology Chinese Academy of Sciences, Beijing, China 1 / 31 Outline Brief
CS711008Z Algorithm Design and Analysis Lecture 8 Linear programming: interior point method Dongbo Bu Institute of Computing Technology Chinese Academy of Sciences, Beijing, China 1 / 31 Outline Brief
3. Linear Programming and Polyhedral Combinatorics
 Massachusetts Institute of Technology 18.433: Combinatorial Optimization Michel X. Goemans February 28th, 2013 3. Linear Programming and Polyhedral Combinatorics Summary of what was seen in the introductory
Massachusetts Institute of Technology 18.433: Combinatorial Optimization Michel X. Goemans February 28th, 2013 3. Linear Programming and Polyhedral Combinatorics Summary of what was seen in the introductory
01M1 Lecture Linear and Integer Programming: an Introduction
 01M1 Lecture Linear and Integer Programming: an Introduction Block Course at TU Berlin "Combinatorial Optimization at October 4 15, 2005 groetschel@zib.de Institut für Mathematik, Technische Universität
01M1 Lecture Linear and Integer Programming: an Introduction Block Course at TU Berlin "Combinatorial Optimization at October 4 15, 2005 groetschel@zib.de Institut für Mathematik, Technische Universität
Complexity of linear programming: outline
 Complexity of linear programming: outline I Assessing computational e ciency of algorithms I Computational e ciency of the Simplex method I Ellipsoid algorithm for LP and its computational e ciency IOE
Complexity of linear programming: outline I Assessing computational e ciency of algorithms I Computational e ciency of the Simplex method I Ellipsoid algorithm for LP and its computational e ciency IOE
DM559 Linear and Integer Programming. Lecture 2 Systems of Linear Equations. Marco Chiarandini
 DM559 Linear and Integer Programming Lecture Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark Outline 1. Outline 1. 3 A Motivating Example You are organizing
DM559 Linear and Integer Programming Lecture Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark Outline 1. Outline 1. 3 A Motivating Example You are organizing
3. Linear Programming and Polyhedral Combinatorics
 Massachusetts Institute of Technology 18.453: Combinatorial Optimization Michel X. Goemans April 5, 2017 3. Linear Programming and Polyhedral Combinatorics Summary of what was seen in the introductory
Massachusetts Institute of Technology 18.453: Combinatorial Optimization Michel X. Goemans April 5, 2017 3. Linear Programming and Polyhedral Combinatorics Summary of what was seen in the introductory
Optimization (168) Lecture 7-8-9
 Lecture 7-8-9") Optimization (168) Lecture 7-8-9 Jesús De Loera UC Davis, Mathematics Wednesday, April 2, 2012 1 DEGENERACY IN THE SIMPLEX METHOD 2 DEGENERACY z =2x 1 x 2 + 8x 3 x 4 =1 2x 3 x 5 =3 2x 1 + 4x 2 6x 3 x 6
Optimization (168) Lecture 7-8-9 Jesús De Loera UC Davis, Mathematics Wednesday, April 2, 2012 1 DEGENERACY IN THE SIMPLEX METHOD 2 DEGENERACY z =2x 1 x 2 + 8x 3 x 4 =1 2x 3 x 5 =3 2x 1 + 4x 2 6x 3 x 6
Linear Programming. Chapter Introduction
 Chapter 3 Linear Programming Linear programs (LP) play an important role in the theory and practice of optimization problems. Many COPs can directly be formulated as LPs. Furthermore, LPs are invaluable
Chapter 3 Linear Programming Linear programs (LP) play an important role in the theory and practice of optimization problems. Many COPs can directly be formulated as LPs. Furthermore, LPs are invaluable
Linear Algebra Review: Linear Independence. IE418 Integer Programming. Linear Algebra Review: Subspaces. Linear Algebra Review: Affine Independence
 Linear Algebra Review: Linear Independence IE418: Integer Programming Department of Industrial and Systems Engineering Lehigh University 21st March 2005 A finite collection of vectors x 1,..., x k R n
Linear Algebra Review: Linear Independence IE418: Integer Programming Department of Industrial and Systems Engineering Lehigh University 21st March 2005 A finite collection of vectors x 1,..., x k R n
3. Duality: What is duality? Why does it matter? Sensitivity through duality.
 1 Overview of lecture (10/5/10) 1. Review Simplex Method 2. Sensitivity Analysis: How does solution change as parameters change? How much is the optimal solution effected by changing A, b, or c? How much
1 Overview of lecture (10/5/10) 1. Review Simplex Method 2. Sensitivity Analysis: How does solution change as parameters change? How much is the optimal solution effected by changing A, b, or c? How much
CO 250 Final Exam Guide
 Spring 2017 CO 250 Final Exam Guide TABLE OF CONTENTS richardwu.ca CO 250 Final Exam Guide Introduction to Optimization Kanstantsin Pashkovich Spring 2017 University of Waterloo Last Revision: March 4,
Spring 2017 CO 250 Final Exam Guide TABLE OF CONTENTS richardwu.ca CO 250 Final Exam Guide Introduction to Optimization Kanstantsin Pashkovich Spring 2017 University of Waterloo Last Revision: March 4,
Chapter 1. Preliminaries
 Introduction This dissertation is a reading of chapter 4 in part I of the book : Integer and Combinatorial Optimization by George L. Nemhauser & Laurence A. Wolsey. The chapter elaborates links between
Introduction This dissertation is a reading of chapter 4 in part I of the book : Integer and Combinatorial Optimization by George L. Nemhauser & Laurence A. Wolsey. The chapter elaborates links between
Chapter 2: Linear Programming Basics. (Bertsimas & Tsitsiklis, Chapter 1)
") Chapter 2: Linear Programming Basics (Bertsimas & Tsitsiklis, Chapter 1) 33 Example of a Linear Program Remarks. minimize 2x 1 x 2 + 4x 3 subject to x 1 + x 2 + x 4 2 3x 2 x 3 = 5 x 3 + x 4 3 x 1 0 x 3
Chapter 2: Linear Programming Basics (Bertsimas & Tsitsiklis, Chapter 1) 33 Example of a Linear Program Remarks. minimize 2x 1 x 2 + 4x 3 subject to x 1 + x 2 + x 4 2 3x 2 x 3 = 5 x 3 + x 4 3 x 1 0 x 3
Lecture 1 Introduction
 L. Vandenberghe EE236A (Fall 2013-14) Lecture 1 Introduction course overview linear optimization examples history approximate syllabus basic definitions linear optimization in vector and matrix notation
L. Vandenberghe EE236A (Fall 2013-14) Lecture 1 Introduction course overview linear optimization examples history approximate syllabus basic definitions linear optimization in vector and matrix notation
7. Lecture notes on the ellipsoid algorithm
 Massachusetts Institute of Technology Michel X. Goemans 18.433: Combinatorial Optimization 7. Lecture notes on the ellipsoid algorithm The simplex algorithm was the first algorithm proposed for linear
Massachusetts Institute of Technology Michel X. Goemans 18.433: Combinatorial Optimization 7. Lecture notes on the ellipsoid algorithm The simplex algorithm was the first algorithm proposed for linear
Algorithmic Game Theory and Applications. Lecture 5: Introduction to Linear Programming
 Algorithmic Game Theory and Applications Lecture 5: Introduction to Linear Programming Kousha Etessami real world example : the diet problem You are a fastidious eater. You want to make sure that every
Algorithmic Game Theory and Applications Lecture 5: Introduction to Linear Programming Kousha Etessami real world example : the diet problem You are a fastidious eater. You want to make sure that every
Chapter 1: Linear Programming
 Chapter 1: Linear Programming Math 368 c Copyright 2013 R Clark Robinson May 22, 2013 Chapter 1: Linear Programming 1 Max and Min For f : D R n R, f (D) = {f (x) : x D } is set of attainable values of
Chapter 1: Linear Programming Math 368 c Copyright 2013 R Clark Robinson May 22, 2013 Chapter 1: Linear Programming 1 Max and Min For f : D R n R, f (D) = {f (x) : x D } is set of attainable values of
Optimization methods NOPT048
 Optimization methods NOPT048 Jirka Fink https://ktiml.mff.cuni.cz/ fink/ Department of Theoretical Computer Science and Mathematical Logic Faculty of Mathematics and Physics Charles University in Prague
Optimization methods NOPT048 Jirka Fink https://ktiml.mff.cuni.cz/ fink/ Department of Theoretical Computer Science and Mathematical Logic Faculty of Mathematics and Physics Charles University in Prague
Polynomiality of Linear Programming
 Chapter 10 Polynomiality of Linear Programming In the previous section, we presented the Simplex Method. This method turns out to be very efficient for solving linear programmes in practice. While it is
Chapter 10 Polynomiality of Linear Programming In the previous section, we presented the Simplex Method. This method turns out to be very efficient for solving linear programmes in practice. While it is
4.6 Linear Programming duality
 4.6 Linear Programming duality To any minimization (maximization) LP we can associate a closely related maximization (minimization) LP Different spaces and objective functions but in general same optimal
4.6 Linear Programming duality To any minimization (maximization) LP we can associate a closely related maximization (minimization) LP Different spaces and objective functions but in general same optimal
Introduction to optimization
 Introduction to optimization Geir Dahl CMA, Dept. of Mathematics and Dept. of Informatics University of Oslo 1 / 24 The plan 1. The basic concepts 2. Some useful tools (linear programming = linear optimization)
Introduction to optimization Geir Dahl CMA, Dept. of Mathematics and Dept. of Informatics University of Oslo 1 / 24 The plan 1. The basic concepts 2. Some useful tools (linear programming = linear optimization)
Linear and Integer Optimization (V3C1/F4C1)
") Linear and Integer Optimization (V3C1/F4C1) Lecture notes Ulrich Brenner Research Institute for Discrete Mathematics, University of Bonn Winter term 2016/2017 March 8, 2017 12:02 1 Preface Continuous updates
Linear and Integer Optimization (V3C1/F4C1) Lecture notes Ulrich Brenner Research Institute for Discrete Mathematics, University of Bonn Winter term 2016/2017 March 8, 2017 12:02 1 Preface Continuous updates
Appendix PRELIMINARIES 1. THEOREMS OF ALTERNATIVES FOR SYSTEMS OF LINEAR CONSTRAINTS
 Appendix PRELIMINARIES 1. THEOREMS OF ALTERNATIVES FOR SYSTEMS OF LINEAR CONSTRAINTS Here we consider systems of linear constraints, consisting of equations or inequalities or both. A feasible solution
Appendix PRELIMINARIES 1. THEOREMS OF ALTERNATIVES FOR SYSTEMS OF LINEAR CONSTRAINTS Here we consider systems of linear constraints, consisting of equations or inequalities or both. A feasible solution
Lecture 6 Simplex method for linear programming
 Lecture 6 Simplex method for linear programming Weinan E 1,2 and Tiejun Li 2 1 Department of Mathematics, Princeton University, weinan@princeton.edu 2 School of Mathematical Sciences, Peking University,
Lecture 6 Simplex method for linear programming Weinan E 1,2 and Tiejun Li 2 1 Department of Mathematics, Princeton University, weinan@princeton.edu 2 School of Mathematical Sciences, Peking University,
CSC373: Algorithm Design, Analysis and Complexity Fall 2017 DENIS PANKRATOV NOVEMBER 1, 2017
 CSC373: Algorithm Design, Analysis and Complexity Fall 2017 DENIS PANKRATOV NOVEMBER 1, 2017 Linear Function f: R n R is linear if it can be written as f x = a T x for some a R n Example: f x 1, x 2 =
CSC373: Algorithm Design, Analysis and Complexity Fall 2017 DENIS PANKRATOV NOVEMBER 1, 2017 Linear Function f: R n R is linear if it can be written as f x = a T x for some a R n Example: f x 1, x 2 =
Lecture notes on the ellipsoid algorithm
 Massachusetts Institute of Technology Handout 1 18.433: Combinatorial Optimization May 14th, 007 Michel X. Goemans Lecture notes on the ellipsoid algorithm The simplex algorithm was the first algorithm
Massachusetts Institute of Technology Handout 1 18.433: Combinatorial Optimization May 14th, 007 Michel X. Goemans Lecture notes on the ellipsoid algorithm The simplex algorithm was the first algorithm
LMI MODELLING 4. CONVEX LMI MODELLING. Didier HENRION. LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ. Universidad de Valladolid, SP March 2009
 LMI MODELLING 4. CONVEX LMI MODELLING Didier HENRION LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ Universidad de Valladolid, SP March 2009 Minors A minor of a matrix F is the determinant of a submatrix
LMI MODELLING 4. CONVEX LMI MODELLING Didier HENRION LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ Universidad de Valladolid, SP March 2009 Minors A minor of a matrix F is the determinant of a submatrix
Optimization methods NOPT048
 Optimization methods NOPT048 Jirka Fink https://ktiml.mff.cuni.cz/ fink/ Department of Theoretical Computer Science and Mathematical Logic Faculty of Mathematics and Physics Charles University in Prague
Optimization methods NOPT048 Jirka Fink https://ktiml.mff.cuni.cz/ fink/ Department of Theoretical Computer Science and Mathematical Logic Faculty of Mathematics and Physics Charles University in Prague
1 Review Session. 1.1 Lecture 2
 1 Review Session Note: The following lists give an overview of the material that was covered in the lectures and sections. Your TF will go through these lists. If anything is unclear or you have questions
1 Review Session Note: The following lists give an overview of the material that was covered in the lectures and sections. Your TF will go through these lists. If anything is unclear or you have questions
3. Vector spaces 3.1 Linear dependence and independence 3.2 Basis and dimension. 5. Extreme points and basic feasible solutions
 A. LINEAR ALGEBRA. CONVEX SETS 1. Matrices and vectors 1.1 Matrix operations 1.2 The rank of a matrix 2. Systems of linear equations 2.1 Basic solutions 3. Vector spaces 3.1 Linear dependence and independence
A. LINEAR ALGEBRA. CONVEX SETS 1. Matrices and vectors 1.1 Matrix operations 1.2 The rank of a matrix 2. Systems of linear equations 2.1 Basic solutions 3. Vector spaces 3.1 Linear dependence and independence
THE UNIVERSITY OF HONG KONG DEPARTMENT OF MATHEMATICS. Operations Research I
 LN/MATH2901/CKC/MS/2008-09 THE UNIVERSITY OF HONG KONG DEPARTMENT OF MATHEMATICS Operations Research I Definition (Linear Programming) A linear programming (LP) problem is characterized by linear functions
LN/MATH2901/CKC/MS/2008-09 THE UNIVERSITY OF HONG KONG DEPARTMENT OF MATHEMATICS Operations Research I Definition (Linear Programming) A linear programming (LP) problem is characterized by linear functions
36106 Managerial Decision Modeling Linear Decision Models: Part II
 1 36106 Managerial Decision Modeling Linear Decision Models: Part II Kipp Martin University of Chicago Booth School of Business January 20, 2014 Reading and Excel Files Reading (Powell and Baker): Sections
1 36106 Managerial Decision Modeling Linear Decision Models: Part II Kipp Martin University of Chicago Booth School of Business January 20, 2014 Reading and Excel Files Reading (Powell and Baker): Sections
Integer Programming ISE 418. Lecture 12. Dr. Ted Ralphs
 Integer Programming ISE 418 Lecture 12 Dr. Ted Ralphs ISE 418 Lecture 12 1 Reading for This Lecture Nemhauser and Wolsey Sections II.2.1 Wolsey Chapter 9 ISE 418 Lecture 12 2 Generating Stronger Valid
Integer Programming ISE 418 Lecture 12 Dr. Ted Ralphs ISE 418 Lecture 12 1 Reading for This Lecture Nemhauser and Wolsey Sections II.2.1 Wolsey Chapter 9 ISE 418 Lecture 12 2 Generating Stronger Valid
Mathematical Optimisation, Chpt 2: Linear Equations and inequalities
 Mathematical Optimisation, Chpt 2: Linear Equations and inequalities Peter J.C. Dickinson p.j.c.dickinson@utwente.nl http://dickinson.website version: 12/02/18 Monday 5th February 2018 Peter J.C. Dickinson
Mathematical Optimisation, Chpt 2: Linear Equations and inequalities Peter J.C. Dickinson p.j.c.dickinson@utwente.nl http://dickinson.website version: 12/02/18 Monday 5th February 2018 Peter J.C. Dickinson
Linear Programming Duality
 Summer 2011 Optimization I Lecture 8 1 Duality recap Linear Programming Duality We motivated the dual of a linear program by thinking about the best possible lower bound on the optimal value we can achieve
Summer 2011 Optimization I Lecture 8 1 Duality recap Linear Programming Duality We motivated the dual of a linear program by thinking about the best possible lower bound on the optimal value we can achieve
A Parametric Simplex Algorithm for Linear Vector Optimization Problems
 A Parametric Simplex Algorithm for Linear Vector Optimization Problems Birgit Rudloff Firdevs Ulus Robert Vanderbei July 9, 2015 Abstract In this paper, a parametric simplex algorithm for solving linear
A Parametric Simplex Algorithm for Linear Vector Optimization Problems Birgit Rudloff Firdevs Ulus Robert Vanderbei July 9, 2015 Abstract In this paper, a parametric simplex algorithm for solving linear
Theory and Internet Protocols
 Game Lecture 2: Linear Programming and Zero Sum Nash Equilibrium Xiaotie Deng AIMS Lab Department of Computer Science Shanghai Jiaotong University September 26, 2016 1 2 3 4 Standard Form (P) Outline
Game Lecture 2: Linear Programming and Zero Sum Nash Equilibrium Xiaotie Deng AIMS Lab Department of Computer Science Shanghai Jiaotong University September 26, 2016 1 2 3 4 Standard Form (P) Outline
4.5 Simplex method. LP in standard form: min z = c T x s.t. Ax = b
 4.5 Simplex method LP in standard form: min z = c T x s.t. Ax = b x 0 George Dantzig (1914-2005) Examine a sequence of basic feasible solutions with non increasing objective function values until an optimal
4.5 Simplex method LP in standard form: min z = c T x s.t. Ax = b x 0 George Dantzig (1914-2005) Examine a sequence of basic feasible solutions with non increasing objective function values until an optimal
DOWNLOAD PDF LINEAR OPTIMIZATION AND APPROXIMATION
 Chapter 1 : COBYLA - Constrained Optimization BY Linear Approximation â pyopt A linear optimization problem is the task of minimizing a linear real-valued function of finitely many variables subject to
Chapter 1 : COBYLA - Constrained Optimization BY Linear Approximation â pyopt A linear optimization problem is the task of minimizing a linear real-valued function of finitely many variables subject to
4. Duality and Sensitivity
 4. Duality and Sensitivity For every instance of an LP, there is an associated LP known as the dual problem. The original problem is known as the primal problem. There are two de nitions of the dual pair
4. Duality and Sensitivity For every instance of an LP, there is an associated LP known as the dual problem. The original problem is known as the primal problem. There are two de nitions of the dual pair
Motivating examples Introduction to algorithms Simplex algorithm. On a particular example General algorithm. Duality An application to game theory
 Instructor: Shengyu Zhang 1 LP Motivating examples Introduction to algorithms Simplex algorithm On a particular example General algorithm Duality An application to game theory 2 Example 1: profit maximization
Instructor: Shengyu Zhang 1 LP Motivating examples Introduction to algorithms Simplex algorithm On a particular example General algorithm Duality An application to game theory 2 Example 1: profit maximization
CSCI 5654 (Linear Programming, Fall 2013) CSCI 5654: Linear Programming. Notes. Lecture-1. August 29, Notes
 CSCI 5654: Linear Programming. Notes. Lecture-1. August 29, Notes") CSCI 5654 (Linear Programming, Fall 2013) Lecture-1 August 29, 2013 Lecture 1 Slide# 1 CSCI 5654: Linear Programming Instructor: Sriram Sankaranarayanan. Meeting times: Tuesday-Thursday, 12:30-1:45 p.m.
CSCI 5654 (Linear Programming, Fall 2013) Lecture-1 August 29, 2013 Lecture 1 Slide# 1 CSCI 5654: Linear Programming Instructor: Sriram Sankaranarayanan. Meeting times: Tuesday-Thursday, 12:30-1:45 p.m.
15-780: LinearProgramming
 15-780: LinearProgramming J. Zico Kolter February 1-3, 2016 1 Outline Introduction Some linear algebra review Linear programming Simplex algorithm Duality and dual simplex 2 Outline Introduction Some linear
15-780: LinearProgramming J. Zico Kolter February 1-3, 2016 1 Outline Introduction Some linear algebra review Linear programming Simplex algorithm Duality and dual simplex 2 Outline Introduction Some linear
Linear Programming and the Simplex method
 Linear Programming and the Simplex method Harald Enzinger, Michael Rath Signal Processing and Speech Communication Laboratory Jan 9, 2012 Harald Enzinger, Michael Rath Jan 9, 2012 page 1/37 Outline Introduction
Linear Programming and the Simplex method Harald Enzinger, Michael Rath Signal Processing and Speech Communication Laboratory Jan 9, 2012 Harald Enzinger, Michael Rath Jan 9, 2012 page 1/37 Outline Introduction
CS711008Z Algorithm Design and Analysis
 .. CS711008Z Algorithm Design and Analysis Lecture 9. Algorithm design technique: Linear programming and duality Dongbo Bu Institute of Computing Technology Chinese Academy of Sciences, Beijing, China
.. CS711008Z Algorithm Design and Analysis Lecture 9. Algorithm design technique: Linear programming and duality Dongbo Bu Institute of Computing Technology Chinese Academy of Sciences, Beijing, China
Convex Optimization M2
 Convex Optimization M2 Lecture 3 A. d Aspremont. Convex Optimization M2. 1/49 Duality A. d Aspremont. Convex Optimization M2. 2/49 DMs DM par email: dm.daspremont@gmail.com A. d Aspremont. Convex Optimization
Convex Optimization M2 Lecture 3 A. d Aspremont. Convex Optimization M2. 1/49 Duality A. d Aspremont. Convex Optimization M2. 2/49 DMs DM par email: dm.daspremont@gmail.com A. d Aspremont. Convex Optimization
Introduction to Linear and Combinatorial Optimization (ADM I)
") Introduction to Linear and Combinatorial Optimization (ADM I) Rolf Möhring based on the 20011/12 course by Martin Skutella TU Berlin WS 2013/14 1 General Remarks new flavor of ADM I introduce linear and
Introduction to Linear and Combinatorial Optimization (ADM I) Rolf Möhring based on the 20011/12 course by Martin Skutella TU Berlin WS 2013/14 1 General Remarks new flavor of ADM I introduce linear and
Lecture Note 18: Duality
 MATH 5330: Computational Methods of Linear Algebra 1 The Dual Problems Lecture Note 18: Duality Xianyi Zeng Department of Mathematical Sciences, UTEP The concept duality, just like accuracy and stability,
MATH 5330: Computational Methods of Linear Algebra 1 The Dual Problems Lecture Note 18: Duality Xianyi Zeng Department of Mathematical Sciences, UTEP The concept duality, just like accuracy and stability,
! Fast commercial solvers: CPLEX, OSL. ! Powerful modeling languages: AMPL, GAMS. ! Ranked among most important scientific advances of 20 th century.
 Linear Programming Linear Programming see ORF 07 What is it?! Quintessential tool for optimal allocation of scarce resources, among a number of competing activities.! Powerful and general problem-solving
Linear Programming Linear Programming see ORF 07 What is it?! Quintessential tool for optimal allocation of scarce resources, among a number of competing activities.! Powerful and general problem-solving
MATH3017: Mathematical Programming
 MATH3017: Mathematical Programming Nothing happens in the universe that does not have a sense of either certain maximum or minimum Leonhard Euler, Swiss Mathematician and Physicist, 1707 1783 About the
MATH3017: Mathematical Programming Nothing happens in the universe that does not have a sense of either certain maximum or minimum Leonhard Euler, Swiss Mathematician and Physicist, 1707 1783 About the
Revised Simplex Method
 DM545 Linear and Integer Programming Lecture 7 Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark Outline 1. 2. 2 Motivation Complexity of single pivot operation
DM545 Linear and Integer Programming Lecture 7 Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark Outline 1. 2. 2 Motivation Complexity of single pivot operation
CSCI 1951-G Optimization Methods in Finance Part 01: Linear Programming
 CSCI 1951-G Optimization Methods in Finance Part 01: Linear Programming January 26, 2018 1 / 38 Liability/asset cash-flow matching problem Recall the formulation of the problem: max w c 1 + p 1 e 1 = 150
CSCI 1951-G Optimization Methods in Finance Part 01: Linear Programming January 26, 2018 1 / 38 Liability/asset cash-flow matching problem Recall the formulation of the problem: max w c 1 + p 1 e 1 = 150
Available online Journal of Scientific and Engineering Research, 2015, 2(3): Research Article
: Research Article") Available online www.jsaer.com, 2015, 2(3):13-21 Research Article ISSN: 2394-2630 CODEN(USA): JSERBR The Optimization of Production Cost using Linear Programming Solver Ezeliora Chukwuemeka Daniel 1*,
Available online www.jsaer.com, 2015, 2(3):13-21 Research Article ISSN: 2394-2630 CODEN(USA): JSERBR The Optimization of Production Cost using Linear Programming Solver Ezeliora Chukwuemeka Daniel 1*,
Numerical Optimization
 Linear Programming Computer Science and Automation Indian Institute of Science Bangalore 560 012, India. NPTEL Course on min x s.t. Transportation Problem ij c ijx ij 3 j=1 x ij a i, i = 1, 2 2 i=1 x ij
Linear Programming Computer Science and Automation Indian Institute of Science Bangalore 560 012, India. NPTEL Course on min x s.t. Transportation Problem ij c ijx ij 3 j=1 x ij a i, i = 1, 2 2 i=1 x ij
Mathematical Optimisation, Chpt 2: Linear Equations and inequalities
 Introduction Gauss-elimination Orthogonal projection Linear Inequalities Integer Solutions Mathematical Optimisation, Chpt 2: Linear Equations and inequalities Peter J.C. Dickinson p.j.c.dickinson@utwente.nl
Introduction Gauss-elimination Orthogonal projection Linear Inequalities Integer Solutions Mathematical Optimisation, Chpt 2: Linear Equations and inequalities Peter J.C. Dickinson p.j.c.dickinson@utwente.nl
COT 6936: Topics in Algorithms! Giri Narasimhan. ECS 254A / EC 2443; Phone: x3748
 COT 6936: Topics in Algorithms! Giri Narasimhan ECS 254A / EC 2443; Phone: x3748 giri@cs.fiu.edu https://moodle.cis.fiu.edu/v2.1/course/view.php?id=612 Gaussian Elimination! Solving a system of simultaneous
COT 6936: Topics in Algorithms! Giri Narasimhan ECS 254A / EC 2443; Phone: x3748 giri@cs.fiu.edu https://moodle.cis.fiu.edu/v2.1/course/view.php?id=612 Gaussian Elimination! Solving a system of simultaneous
Lecture 9: Dantzig-Wolfe Decomposition
 Lecture 9: Dantzig-Wolfe Decomposition (3 units) Outline Dantzig-Wolfe decomposition Column generation algorithm Relation to Lagrangian dual Branch-and-price method Generated assignment problem and multi-commodity
Lecture 9: Dantzig-Wolfe Decomposition (3 units) Outline Dantzig-Wolfe decomposition Column generation algorithm Relation to Lagrangian dual Branch-and-price method Generated assignment problem and multi-commodity
Appendix A Taylor Approximations and Definite Matrices
 Appendix A Taylor Approximations and Definite Matrices Taylor approximations provide an easy way to approximate a function as a polynomial, using the derivatives of the function. We know, from elementary
Appendix A Taylor Approximations and Definite Matrices Taylor approximations provide an easy way to approximate a function as a polynomial, using the derivatives of the function. We know, from elementary
Yinyu Ye, MS&E, Stanford MS&E310 Lecture Note #06. The Simplex Method
 The Simplex Method Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A. http://www.stanford.edu/ yyye (LY, Chapters 2.3-2.5, 3.1-3.4) 1 Geometry of Linear
The Simplex Method Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A. http://www.stanford.edu/ yyye (LY, Chapters 2.3-2.5, 3.1-3.4) 1 Geometry of Linear
A Brief Review on Convex Optimization
 A Brief Review on Convex Optimization 1 Convex set S R n is convex if x,y S, λ,µ 0, λ+µ = 1 λx+µy S geometrically: x,y S line segment through x,y S examples (one convex, two nonconvex sets): A Brief Review
A Brief Review on Convex Optimization 1 Convex set S R n is convex if x,y S, λ,µ 0, λ+µ = 1 λx+µy S geometrically: x,y S line segment through x,y S examples (one convex, two nonconvex sets): A Brief Review
Lecture 6 - Convex Sets
 Lecture 6 - Convex Sets Definition A set C R n is called convex if for any x, y C and λ [0, 1], the point λx + (1 λ)y belongs to C. The above definition is equivalent to saying that for any x, y C, the
Lecture 6 - Convex Sets Definition A set C R n is called convex if for any x, y C and λ [0, 1], the point λx + (1 λ)y belongs to C. The above definition is equivalent to saying that for any x, y C, the
Contents Real Vector Spaces Linear Equations and Linear Inequalities Polyhedra Linear Programs and the Simplex Method Lagrangian Duality
 Contents Introduction v Chapter 1. Real Vector Spaces 1 1.1. Linear and Affine Spaces 1 1.2. Maps and Matrices 4 1.3. Inner Products and Norms 7 1.4. Continuous and Differentiable Functions 11 Chapter
Contents Introduction v Chapter 1. Real Vector Spaces 1 1.1. Linear and Affine Spaces 1 1.2. Maps and Matrices 4 1.3. Inner Products and Norms 7 1.4. Continuous and Differentiable Functions 11 Chapter
x 1 + x 2 2 x 1 x 2 1 x 2 2 min 3x 1 + 2x 2
 Lecture 1 LPs: Algebraic View 1.1 Introduction to Linear Programming Linear programs began to get a lot of attention in 1940 s, when people were interested in minimizing costs of various systems while
Lecture 1 LPs: Algebraic View 1.1 Introduction to Linear Programming Linear programs began to get a lot of attention in 1940 s, when people were interested in minimizing costs of various systems while
Linear Programming Inverse Projection Theory Chapter 3
 1 Linear Programming Inverse Projection Theory Chapter 3 University of Chicago Booth School of Business Kipp Martin September 26, 2017 2 Where We Are Headed We want to solve problems with special structure!
1 Linear Programming Inverse Projection Theory Chapter 3 University of Chicago Booth School of Business Kipp Martin September 26, 2017 2 Where We Are Headed We want to solve problems with special structure!
Linear Programming: Simplex
 Linear Programming: Simplex Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. IMA, August 2016 Stephen Wright (UW-Madison) Linear Programming: Simplex IMA, August 2016
Linear Programming: Simplex Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. IMA, August 2016 Stephen Wright (UW-Madison) Linear Programming: Simplex IMA, August 2016
Introduction to Mathematical Programming IE406. Lecture 10. Dr. Ted Ralphs
 Introduction to Mathematical Programming IE406 Lecture 10 Dr. Ted Ralphs IE406 Lecture 10 1 Reading for This Lecture Bertsimas 4.1-4.3 IE406 Lecture 10 2 Duality Theory: Motivation Consider the following
Introduction to Mathematical Programming IE406 Lecture 10 Dr. Ted Ralphs IE406 Lecture 10 1 Reading for This Lecture Bertsimas 4.1-4.3 IE406 Lecture 10 2 Duality Theory: Motivation Consider the following
Chapter 1 Linear Programming. Paragraph 5 Duality
 Chapter 1 Linear Programming Paragraph 5 Duality What we did so far We developed the 2-Phase Simplex Algorithm: Hop (reasonably) from basic solution (bs) to bs until you find a basic feasible solution
Chapter 1 Linear Programming Paragraph 5 Duality What we did so far We developed the 2-Phase Simplex Algorithm: Hop (reasonably) from basic solution (bs) to bs until you find a basic feasible solution
Today: Linear Programming
 Today: Linear Programming COSC 581, Algorithms March 27, 2014 Many of these slides are adapted from several online sources Today s class: Chapter 29.1 Reading Assignments Reading assignment for next Thursday
Today: Linear Programming COSC 581, Algorithms March 27, 2014 Many of these slides are adapted from several online sources Today s class: Chapter 29.1 Reading Assignments Reading assignment for next Thursday
AN INTRODUCTION TO CONVEXITY
 AN INTRODUCTION TO CONVEXITY GEIR DAHL NOVEMBER 2010 University of Oslo, Centre of Mathematics for Applications, P.O.Box 1053, Blindern, 0316 Oslo, Norway (geird@math.uio.no) Contents 1 The basic concepts
AN INTRODUCTION TO CONVEXITY GEIR DAHL NOVEMBER 2010 University of Oslo, Centre of Mathematics for Applications, P.O.Box 1053, Blindern, 0316 Oslo, Norway (geird@math.uio.no) Contents 1 The basic concepts
Thursday, May 24, Linear Programming
 Linear Programming Linear optimization problems max f(x) g i (x) b i x j R i =1,...,m j =1,...,n Optimization problem g i (x) f(x) When and are linear functions Linear Programming Problem 1 n max c x n
Linear Programming Linear optimization problems max f(x) g i (x) b i x j R i =1,...,m j =1,...,n Optimization problem g i (x) f(x) When and are linear functions Linear Programming Problem 1 n max c x n
CSCI : Optimization and Control of Networks. Review on Convex Optimization
 CSCI7000-016: Optimization and Control of Networks Review on Convex Optimization 1 Convex set S R n is convex if x,y S, λ,µ 0, λ+µ = 1 λx+µy S geometrically: x,y S line segment through x,y S examples (one
CSCI7000-016: Optimization and Control of Networks Review on Convex Optimization 1 Convex set S R n is convex if x,y S, λ,µ 0, λ+µ = 1 λx+µy S geometrically: x,y S line segment through x,y S examples (one
Section Notes 9. IP: Cutting Planes. Applied Math 121. Week of April 12, 2010
 Section Notes 9 IP: Cutting Planes Applied Math 121 Week of April 12, 2010 Goals for the week understand what a strong formulations is. be familiar with the cutting planes algorithm and the types of cuts
Section Notes 9 IP: Cutting Planes Applied Math 121 Week of April 12, 2010 Goals for the week understand what a strong formulations is. be familiar with the cutting planes algorithm and the types of cuts
Multicommodity Flows and Column Generation
 Lecture Notes Multicommodity Flows and Column Generation Marc Pfetsch Zuse Institute Berlin pfetsch@zib.de last change: 2/8/2006 Technische Universität Berlin Fakultät II, Institut für Mathematik WS 2006/07
Lecture Notes Multicommodity Flows and Column Generation Marc Pfetsch Zuse Institute Berlin pfetsch@zib.de last change: 2/8/2006 Technische Universität Berlin Fakultät II, Institut für Mathematik WS 2006/07
OPERATIONS RESEARCH. Linear Programming Problem
 OPERATIONS RESEARCH Chapter 1 Linear Programming Problem Prof. Bibhas C. Giri Department of Mathematics Jadavpur University Kolkata, India Email: bcgiri.jumath@gmail.com MODULE - 2: Simplex Method for
OPERATIONS RESEARCH Chapter 1 Linear Programming Problem Prof. Bibhas C. Giri Department of Mathematics Jadavpur University Kolkata, India Email: bcgiri.jumath@gmail.com MODULE - 2: Simplex Method for
Duality in Mathematical Programming
 Duality in Mathematical Programming Leo Liberti LIX, École Polytechnique liberti@lix.polytechnique.fr Operations research courses p. 1 Lecture material Website: http://www.lix.polytechnique.fr/~liberti/
Duality in Mathematical Programming Leo Liberti LIX, École Polytechnique liberti@lix.polytechnique.fr Operations research courses p. 1 Lecture material Website: http://www.lix.polytechnique.fr/~liberti/
Lecture 6: Conic Optimization September 8
 IE 598: Big Data Optimization Fall 2016 Lecture 6: Conic Optimization September 8 Lecturer: Niao He Scriber: Juan Xu Overview In this lecture, we finish up our previous discussion on optimality conditions
IE 598: Big Data Optimization Fall 2016 Lecture 6: Conic Optimization September 8 Lecturer: Niao He Scriber: Juan Xu Overview In this lecture, we finish up our previous discussion on optimality conditions
Ω R n is called the constraint set or feasible set. x 1
 1 Chapter 5 Linear Programming (LP) General constrained optimization problem: minimize subject to f(x) x Ω Ω R n is called the constraint set or feasible set. any point x Ω is called a feasible point We
1 Chapter 5 Linear Programming (LP) General constrained optimization problem: minimize subject to f(x) x Ω Ω R n is called the constraint set or feasible set. any point x Ω is called a feasible point We
Lecture 13: Linear programming I
 A Theorist s Toolkit (CMU 18-859T, Fall 013) Lecture 13: Linear programming I October 1, 013 Lecturer: Ryan O Donnell Scribe: Yuting Ge A Generic Reference: Ryan recommends a very nice book Understanding
A Theorist s Toolkit (CMU 18-859T, Fall 013) Lecture 13: Linear programming I October 1, 013 Lecturer: Ryan O Donnell Scribe: Yuting Ge A Generic Reference: Ryan recommends a very nice book Understanding
4. Duality Duality 4.1 Duality of LPs and the duality theorem. min c T x x R n, c R n. s.t. ai Tx = b i i M a i R n
 2 4. Duality of LPs and the duality theorem... 22 4.2 Complementary slackness... 23 4.3 The shortest path problem and its dual... 24 4.4 Farkas' Lemma... 25 4.5 Dual information in the tableau... 26 4.6
2 4. Duality of LPs and the duality theorem... 22 4.2 Complementary slackness... 23 4.3 The shortest path problem and its dual... 24 4.4 Farkas' Lemma... 25 4.5 Dual information in the tableau... 26 4.6
Next topics: Solving systems of linear equations
 Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
Written Exam Linear and Integer Programming (DM545)
") Written Exam Linear and Integer Programming (DM545) Department of Mathematics and Computer Science University of Southern Denmark Monday, June 22, 2015, 10:00 14:00, Festsalen, Niels Bohr Allé 1 The exam
Written Exam Linear and Integer Programming (DM545) Department of Mathematics and Computer Science University of Southern Denmark Monday, June 22, 2015, 10:00 14:00, Festsalen, Niels Bohr Allé 1 The exam
Linear Programming. Leo Liberti. February 20, Abstract
 Linear Programming Leo Liberti LIX, École Polytechnique, F-91128 Palaiseau, France (liberti@lix.polytechnique.fr) February 20, 2006 Abstract This paper is a short didactical introduction to Linear Programming
Linear Programming Leo Liberti LIX, École Polytechnique, F-91128 Palaiseau, France (liberti@lix.polytechnique.fr) February 20, 2006 Abstract This paper is a short didactical introduction to Linear Programming
Input: System of inequalities or equalities over the reals R. Output: Value for variables that minimizes cost function
 Linear programming Input: System of inequalities or equalities over the reals R A linear cost function Output: Value for variables that minimizes cost function Example: Minimize 6x+4y Subject to 3x + 2y
Linear programming Input: System of inequalities or equalities over the reals R A linear cost function Output: Value for variables that minimizes cost function Example: Minimize 6x+4y Subject to 3x + 2y
Novel update techniques for the revised simplex method (and their application)
") Novel update techniques for the revised simplex method (and their application) Qi Huangfu 1 Julian Hall 2 Others 1 FICO 2 School of Mathematics, University of Edinburgh ERGO 30 November 2016 Overview Background
Novel update techniques for the revised simplex method (and their application) Qi Huangfu 1 Julian Hall 2 Others 1 FICO 2 School of Mathematics, University of Edinburgh ERGO 30 November 2016 Overview Background
LU Factorization. Marco Chiarandini. DM559 Linear and Integer Programming. Department of Mathematics & Computer Science University of Southern Denmark
 DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
MAT-INF4110/MAT-INF9110 Mathematical optimization
 MAT-INF4110/MAT-INF9110 Mathematical optimization Geir Dahl August 20, 2013 Convexity Part IV Chapter 4 Representation of convex sets different representations of convex sets, boundary polyhedra and polytopes:
MAT-INF4110/MAT-INF9110 Mathematical optimization Geir Dahl August 20, 2013 Convexity Part IV Chapter 4 Representation of convex sets different representations of convex sets, boundary polyhedra and polytopes:
Discrete Optimization
 Prof. Friedrich Eisenbrand Martin Niemeier Due Date: April 15, 2010 Discussions: March 25, April 01 Discrete Optimization Spring 2010 s 3 You can hand in written solutions for up to two of the exercises
Prof. Friedrich Eisenbrand Martin Niemeier Due Date: April 15, 2010 Discussions: March 25, April 01 Discrete Optimization Spring 2010 s 3 You can hand in written solutions for up to two of the exercises
5. Duality. Lagrangian
 5. Duality Convex Optimization Boyd & Vandenberghe Lagrange dual problem weak and strong duality geometric interpretation optimality conditions perturbation and sensitivity analysis examples generalized
5. Duality Convex Optimization Boyd & Vandenberghe Lagrange dual problem weak and strong duality geometric interpretation optimality conditions perturbation and sensitivity analysis examples generalized
IE 521 Convex Optimization
 Lecture 1: 16th January 2019 Outline 1 / 20 Which set is different from others? Figure: Four sets 2 / 20 Which set is different from others? Figure: Four sets 3 / 20 Interior, Closure, Boundary Definition.
Lecture 1: 16th January 2019 Outline 1 / 20 Which set is different from others? Figure: Four sets 2 / 20 Which set is different from others? Figure: Four sets 3 / 20 Interior, Closure, Boundary Definition.
Solving Systems of Linear Equations
 LECTURE 5 Solving Systems of Linear Equations Recall that we introduced the notion of matrices as a way of standardizing the expression of systems of linear equations In today s lecture I shall show how
LECTURE 5 Solving Systems of Linear Equations Recall that we introduced the notion of matrices as a way of standardizing the expression of systems of linear equations In today s lecture I shall show how
The Ellipsoid Algorithm
 The Ellipsoid Algorithm John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA 9 February 2018 Mitchell The Ellipsoid Algorithm 1 / 28 Introduction Outline 1 Introduction 2 Assumptions
The Ellipsoid Algorithm John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA 9 February 2018 Mitchell The Ellipsoid Algorithm 1 / 28 Introduction Outline 1 Introduction 2 Assumptions