The Ellipsoid Algorithm
|
|
|
- Loraine Blair
- 5 years ago
- Views:
Transcription
1 The Ellipsoid Algorithm John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY USA 9 February 2018 Mitchell The Ellipsoid Algorithm 1 / 28
2 Introduction Outline 1 Introduction 2 Assumptions 3 Each iteration 4 Complexity analysis 5 Separation and optimization 6 Relevance to integer optimization 7 N P-Hard problems Mitchell The Ellipsoid Algorithm 2 / 28
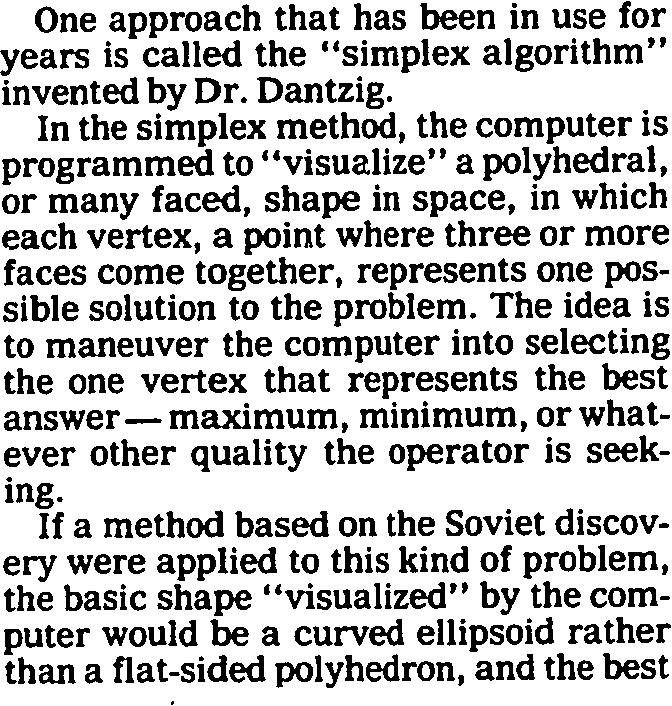
3 Introduction Introduction The simplex algorithm requires exponentially many iterations in the worst case for known pivot rules. In contrast, the ellipsoid algorithm requires a polynomial number of iterations. The ellipsoid algorithm was developed in the 1970s in the Soviet Union, building on earlier Soviet work on nonlinear programming. Mitchell The Ellipsoid Algorithm 3 / 28

4 Introduction New York Times, November 7, 1979 Mitchell The Ellipsoid Algorithm 4 / 28




5 Introduction New York Times, November 7, 1979 Published: November 7, 1979 Copyright The New York Times Mitchell The Ellipsoid Algorithm 5 / 28

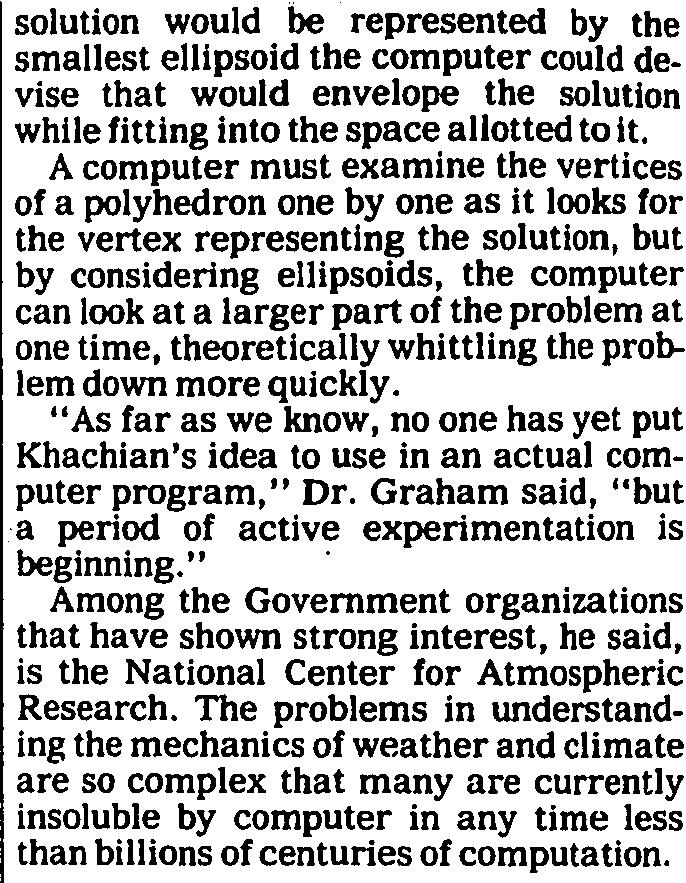
6 Introduction New York Times, November 7, 1979 Published: November 7, 1979 Copyright The New York Times Mitchell The Ellipsoid Algorithm 6 / 28
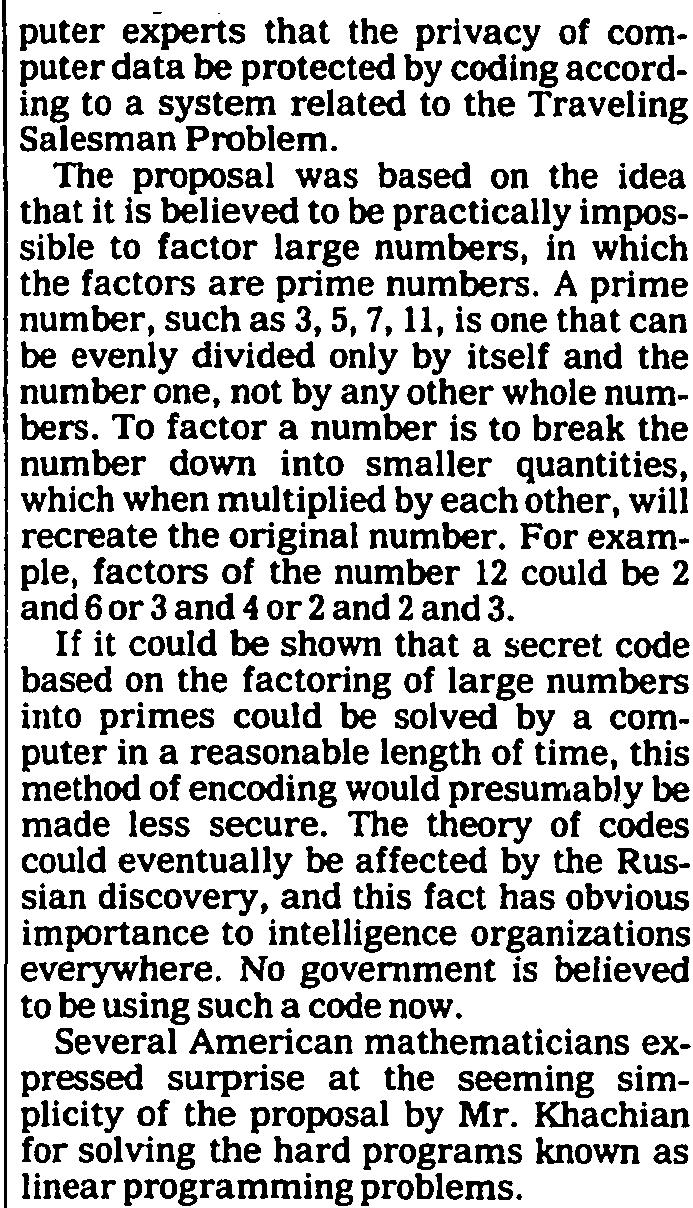
7 Find a feasible solution Introduction The algorithm is a high-dimensional version of binary search. It can be stated as an algorithm to determine whether a feasible solution exists to a system of inequalities: Does there exist x 2 IR n satisfying a T i x apple c i for i = 1,...,m? We let P := {x 2 IR n : a T i x apple c i for i = 1,...,m}. Mitchell The Ellipsoid Algorithm 7 / 28
8 Assumptions Outline 1 Introduction 2 Assumptions 3 Each iteration 4 Complexity analysis 5 Separation and optimization 6 Relevance to integer optimization 7 N P-Hard problems Mitchell The Ellipsoid Algorithm 8 / 28
9 Assumptions Assumptions 1%4 We need to make two assumptions: Assumption 1: If P is nonempty then it includes points contained in a ball of radius R centered at the origin. Assumption 1 can be justified through the use of Cramer s Rule, which lets us bound the norm of any extreme point of P. Mitchell The Ellipsoid Algorithm 9 / 28
10 Assumption 2 Assumptions radius r X p Assumption 2: If P is nonempty then it contains a ball of radius r. Assumption 2 is like a nondegeneracy assumption. Cramer s Rule also lets us place a lower bound on the distance between two extreme points. Technically, we can always make Assumption 2, because the size of the numbers in the parameters can be used to define another parameter and then each c i can be increased by in such a way that the new system has a solution if and only if the old system has a solution, and the new system contains a ball of radius r if it is nonempty. Mitchell The Ellipsoid Algorithm 10 / 28
11 Assumptions Assumption 2 Assumption 2: If P is nonempty then it contains a ball of radius r. Assumption 2 is like a nondegeneracy assumption. Cramer s Rule also lets us place a lower bound on the distance between two extreme points. Technically, we can always make Assumption 2, because the size of the numbers in the parameters can be used to define another parameter and then each c i can be increased by in such a way that the new system has a solution if and only if the old system has a solution, and the new system contains a ball of radius r if it is nonempty. Mitchell The Ellipsoid Algorithm 10 / 28
12 Assumptions Assumption 2 Assumption 2: If P is nonempty then it contains a ball of radius r. Assumption 2 is like a nondegeneracy assumption. Cramer s Rule also lets us place a lower bound on the distance between two extreme points. Technically, we can always make Assumption 2, because the size of the numbers in the parameters can be used to define another parameter and then each c i can be increased by in such a way that the new system has a solution if and only if the old system has a solution, and the new system contains a ball of radius r if it is nonempty. Mitchell The Ellipsoid Algorithm 10 / 28
13 Each iteration Outline 1 Introduction 2 Assumptions 3 Each iteration 4 Complexity analysis 5 Separation and optimization 6 Relevance to integer optimization 7 N P-Hard problems Mitchell The Ellipsoid Algorithm 11 / 28
14 Each iteration Each iteration At each iteration we have an ellipsoid which contains (part of) P, if P is nonempty. We check the center x of the ellipsoid: does it satisfy If YES: we are done. a T i x apple c i for i = 1,...,m? Otherwise, we have a violated constraint a T i x apple c j. We define a new ellipsoid that contains the intersection of the old ellipsoid with the halfspace {x 2 IR n : ai T x apple ai T x}. If n = 1 then this would divide our search space in half. In IR n, we don t get such a good improvement. Nonetheless, the size of the ellipsoid shrinks enough that we get convergence in a number of iterations polynomial in n. Mitchell The Ellipsoid Algorithm 12 / 28
15 Each iteration Illustration: trying to find a point in P P x k E k Mitchell The Ellipsoid Algorithm 13 / 28
16 Each iteration Illustration: trying to find a point in P P x k E k a T i x = a T i x k Mitchell The Ellipsoid Algorithm 13 / 28
17 Each iteration Illustration: trying to find a point in P E "= {xer":(x-x" TY! (x-xmei} A P x k+1 x k positive definite, symmetric E k Volume: proportional todeft(mu) E k+1 a T i x = a T i x k Mitchell The Ellipsoid Algorithm 13 / 28
18 Each iteration Illustration: trying to find a point in P P x k+1 E k+1 Mitchell The Ellipsoid Algorithm 13 / 28
19 Each iteration Complexity analysis Initial ellipsoid: Ball of radius R centered at the origin. How many Noes are enough? If the ellipsoid is too small to contain a ball of radius r then P = ;. The algorithm updates from an ellipsoid E to an ellipsoid E 0. It can be shown that the volumes of these ellipsoids are related as: Vol(E 0 ) apple e 1/(2(n+1)) Vol(E). Mitchell The Ellipsoid Algorithm 14 / 28
20 Complexity analysis Outline 1 Introduction 2 Assumptions 3 Each iteration 4 Complexity analysis 5 Separation and optimization 6 Relevance to integer optimization 7 N P-Hard problems Mitchell The Ellipsoid Algorithm 15 / 28
21 How many iterations? Complexity analysis How many Noes to go from a ball of radius R to a ball of radius r? Let v and V denote the volumes of balls of radius r and R, respectively. Let E 0 be the initial ellipsoid, let E k be the ellipsoid after k iterations. We want the smallest value of k so that Vol(E k ) apple v. We also have Vol(E k ) apple h e 1/(2(n+1))i k V = e k/(2(n+1)) V. Thus it suffices to choose k sufficiently large that e k/(2(n+1)) V apple v. Mitchell The Ellipsoid Algorithm 16 / 28
22 Complexity analysis How many iterations, part 2 It suffices to choose k sufficiently large that e k/(2(n+1)) V apple v. Equivalently, after dividing by V and taking logs of both sides, we require v k/(2(n + 1)) apple ln, V which can be restated as requiring k 2(n + 1) ln V. v The ratio V /v can be chosen so that ln(v /v) is O(n 3 ), so we have an algorithm that requires O(n 4 ) iterations. Mitchell The Ellipsoid Algorithm 17 / 28
23 Work per iteration Complexity analysis In exact arithmetic, would need to work with square roots. Can show that it is OK to approximate the square roots and still have the volume of the ellipsoid decrease at almost the same rate. Mitchell The Ellipsoid Algorithm 18 / 28
24 Complexity analysis Finding optimal solutions to linear programs If feasible, cut on the objective function. So restrict attention to the halfspace of points at least as good as the current center. Mitchell The Ellipsoid Algorithm 19 / 28
25 Separation and optimization Outline 1 Introduction 2 Assumptions 3 Each iteration 4 Complexity analysis 5 Separation and optimization 6 Relevance to integer optimization 7 N P-Hard problems Mitchell The Ellipsoid Algorithm 20 / 28
26 Separation and optimization Convex feasibility problems = a Tx< c I a t >a C Definition Given a convex set C IR n and a point x 2 IR n, the separation problem is to determine whether x 2 C. If the answer is NO, a separating hyperplane a T x = c is determined, where a 2 IR n,c2 IR, a T x apple c for all x 2 C, and a T x > c. Mitchell The Ellipsoid Algorithm 21 / 28
27 Separation and optimization Equivalence of separation and feasibilty Theorem Assume the convex set C contains a ball of radius r. If the separation problem for C can be solved in polynomial time then the feasibility problem for C can also be solved in polynomial time. Proof. We use the ellipsoid algorithm. At each iteration, we test whether the center x k of the current ellipsoid is in C. If it is not then the separation problem solution returns a valid constraint for C which we can use to update the ellipsoid. The overall complexity is the product of two polynomial functions, which is polynomial. Mitchell The Ellipsoid Algorithm 22 / 28
28 Separation and optimization Equivalence of separation and feasibilty Theorem Assume the convex set C contains a ball of radius r. If the separation problem for C can be solved in polynomial time then the feasibility problem for C can also be solved in polynomial time. Proof. We use the ellipsoid algorithm. At each iteration, we test whether the center x k of the current ellipsoid is in C. If it is not then the separation problem solution returns a valid constraint for C which we can use to update the ellipsoid. The overall complexity is the product of two polynomial functions, which is polynomial. Mitchell The Ellipsoid Algorithm 22 / 28
29 " i
30 Separation and optimization Equivalence of separation and optimization Consider the optimization problem min x2ir n c T x subject to x 2 C IR n (CP) where C is a convex set and c 2 IR n. Theorem The problem (CP) can be solved in polynomial time if and only if the separation problem for C can be solved in polynomial time. This result follows from using the ellipsoid algorithm. We can optimize over C using the ellipsoid algorithm, generating separating hyperplanes either: by solving the separation problem to separate the current center of the ellipsoid from C, or by cutting on the objective function if x 2 C. Mitchell The Ellipsoid Algorithm 23 / 28
31 Separation and optimization Equivalence of separation and optimization Consider the optimization problem min x2ir n c T x subject to x 2 C IR n (CP) where C is a convex set and c 2 IR n. Theorem The problem (CP) can be solved in polynomial time if and only if the separation problem for C can be solved in polynomial time. This result follows from using the ellipsoid algorithm. We can optimize over C using the ellipsoid algorithm, generating separating hyperplanes either: by solving the separation problem to separate the current center of the ellipsoid from C, or by cutting on the objective function if x 2 C. Mitchell The Ellipsoid Algorithm 23 / 28
32 Separation and optimization Equivalence of separation and optimization Consider the optimization problem min x2ir n c T x subject to x 2 C IR n (CP) where C is a convex set and c 2 IR n. Theorem The problem (CP) can be solved in polynomial time if and only if the separation problem for C can be solved in polynomial time. This result follows from using the ellipsoid algorithm. We can optimize over C using the ellipsoid algorithm, generating separating hyperplanes either: by solving the separation problem to separate the current center of the ellipsoid from C, or by cutting on the objective function if x 2 C. Mitchell The Ellipsoid Algorithm 23 / 28
33 ±. Ex<<7 4
34 Relevance to integer optimization Outline 1 Introduction 2 Assumptions 3 Each iteration 4 Complexity analysis 5 Separation and optimization 6 Relevance to integer optimization 7 N P-Hard problems Mitchell The Ellipsoid Algorithm 24 / 28
35 Relevance to integer optimization Integer optimization as a linear program Consider the integer optimization problem min x c T x subject to x 2 S (IP) x 2 Z n IR n for some subset S, and where Z denotes the set of integers. Let C denote the convex hull of the set of integer points in S, so C = conv(s \ Z n ) (The convex hull of a set T is the smallest convex set containing T.A formal definition will be given next week.) All the extreme points of C are feasible integer points, so we could in principle solve (IP) by solving the linear program min x c T x subject to x 2 C IR n (LP). Mitchell The Ellipsoid Algorithm 25 / 28
36 %t I.
37 Relevance to integer optimization Solving the linear program The difficulty with this approach is that it is very hard to get an explicit formulation for C. If we can solve the separation problem for C in polynomial time then we can solve (LP) in polynomial time, which means we can solve (IP) in polynomial time. Thus, for N P-complete problems, we cannot expect to solve the separation problem in polynomial time. Conversely, if we can solve the optimization problem in polynomial time then we can solve the separation problem in polynomial time. For example, we can solve the problem of finding a minimum weight perfect matching on a graph G =(V, E) in polynomial time, and indeed the separation problem of determining whether a point x is in the convex hull of the set of perfect matchings can be solved in O( V 4 ) time. Mitchell The Ellipsoid Algorithm 26 / 28
38 N P-Hard problems Outline 1 Introduction 2 Assumptions 3 Each iteration 4 Complexity analysis 5 Separation and optimization 6 Relevance to integer optimization 7 N P-Hard problems Mitchell The Ellipsoid Algorithm 27 / 28
39 N P-hard problems N P-Hard problems A problem is called N P-hard if it at least as hard as an N P-complete problem, in the sense that the N P-complete problem can be polynomially reduced to the N P-hard problem. An N P-hard problem need not be a feasibility problem. In particular, optimization versions of N P-complete integer programming feasibility problems are N P-hard. Mitchell The Ellipsoid Algorithm 28 / 28
Math Models of OR: Some Definitions
 Math Models of OR: Some Definitions John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA September 2018 Mitchell Some Definitions 1 / 20 Active constraints Outline 1 Active constraints
Math Models of OR: Some Definitions John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA September 2018 Mitchell Some Definitions 1 / 20 Active constraints Outline 1 Active constraints
Complexity of linear programming: outline
 Complexity of linear programming: outline I Assessing computational e ciency of algorithms I Computational e ciency of the Simplex method I Ellipsoid algorithm for LP and its computational e ciency IOE
Complexity of linear programming: outline I Assessing computational e ciency of algorithms I Computational e ciency of the Simplex method I Ellipsoid algorithm for LP and its computational e ciency IOE
7. Lecture notes on the ellipsoid algorithm
 Massachusetts Institute of Technology Michel X. Goemans 18.433: Combinatorial Optimization 7. Lecture notes on the ellipsoid algorithm The simplex algorithm was the first algorithm proposed for linear
Massachusetts Institute of Technology Michel X. Goemans 18.433: Combinatorial Optimization 7. Lecture notes on the ellipsoid algorithm The simplex algorithm was the first algorithm proposed for linear
The Ellipsoid (Kachiyan) Method
 Method") Yinyu Ye, MS&E, Stanford MS&E310 Lecture Note: Ellipsoid Method 1 The Ellipsoid (Kachiyan) Method Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A.
Yinyu Ye, MS&E, Stanford MS&E310 Lecture Note: Ellipsoid Method 1 The Ellipsoid (Kachiyan) Method Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A.
Lecture 15: October 15
 10-725: Optimization Fall 2012 Lecturer: Barnabas Poczos Lecture 15: October 15 Scribes: Christian Kroer, Fanyi Xiao Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have
10-725: Optimization Fall 2012 Lecturer: Barnabas Poczos Lecture 15: October 15 Scribes: Christian Kroer, Fanyi Xiao Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer: These notes have
Lecture notes on the ellipsoid algorithm
 Massachusetts Institute of Technology Handout 1 18.433: Combinatorial Optimization May 14th, 007 Michel X. Goemans Lecture notes on the ellipsoid algorithm The simplex algorithm was the first algorithm
Massachusetts Institute of Technology Handout 1 18.433: Combinatorial Optimization May 14th, 007 Michel X. Goemans Lecture notes on the ellipsoid algorithm The simplex algorithm was the first algorithm
LP Relaxations of Mixed Integer Programs
 LP Relaxations of Mixed Integer Programs John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA February 2015 Mitchell LP Relaxations 1 / 29 LP Relaxations LP relaxations We want
LP Relaxations of Mixed Integer Programs John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA February 2015 Mitchell LP Relaxations 1 / 29 LP Relaxations LP relaxations We want
Math Models of OR: Extreme Points and Basic Feasible Solutions
 Math Models of OR: Extreme Points and Basic Feasible Solutions John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 1180 USA September 018 Mitchell Extreme Points and Basic Feasible Solutions
Math Models of OR: Extreme Points and Basic Feasible Solutions John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 1180 USA September 018 Mitchell Extreme Points and Basic Feasible Solutions
Math Models of OR: Branch-and-Bound
 Math Models of OR: Branch-and-Bound John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA November 2018 Mitchell Branch-and-Bound 1 / 15 Branch-and-Bound Outline 1 Branch-and-Bound
Math Models of OR: Branch-and-Bound John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA November 2018 Mitchell Branch-and-Bound 1 / 15 Branch-and-Bound Outline 1 Branch-and-Bound
Math Models of OR: Handling Upper Bounds in Simplex
 Math Models of OR: Handling Upper Bounds in Simplex John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 280 USA September 208 Mitchell Handling Upper Bounds in Simplex / 8 Introduction Outline
Math Models of OR: Handling Upper Bounds in Simplex John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 280 USA September 208 Mitchell Handling Upper Bounds in Simplex / 8 Introduction Outline
CS675: Convex and Combinatorial Optimization Spring 2018 The Ellipsoid Algorithm. Instructor: Shaddin Dughmi
 CS675: Convex and Combinatorial Optimization Spring 2018 The Ellipsoid Algorithm Instructor: Shaddin Dughmi History and Basics Originally developed in the mid 70s by Iudin, Nemirovski, and Shor for use
CS675: Convex and Combinatorial Optimization Spring 2018 The Ellipsoid Algorithm Instructor: Shaddin Dughmi History and Basics Originally developed in the mid 70s by Iudin, Nemirovski, and Shor for use
15.081J/6.251J Introduction to Mathematical Programming. Lecture 18: The Ellipsoid method
 15.081J/6.251J Introduction to Mathematical Programming Lecture 18: The Ellipsoid method 1 Outline Efficient algorithms and computational complexity Slide 1 The key geometric result behind the ellipsoid
15.081J/6.251J Introduction to Mathematical Programming Lecture 18: The Ellipsoid method 1 Outline Efficient algorithms and computational complexity Slide 1 The key geometric result behind the ellipsoid
Math Models of OR: Sensitivity Analysis
 Math Models of OR: Sensitivity Analysis John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 8 USA October 8 Mitchell Sensitivity Analysis / 9 Optimal tableau and pivot matrix Outline Optimal
Math Models of OR: Sensitivity Analysis John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 8 USA October 8 Mitchell Sensitivity Analysis / 9 Optimal tableau and pivot matrix Outline Optimal
15.083J/6.859J Integer Optimization. Lecture 10: Solving Relaxations
 15.083J/6.859J Integer Optimization Lecture 10: Solving Relaxations 1 Outline The key geometric result behind the ellipsoid method Slide 1 The ellipsoid method for the feasibility problem The ellipsoid
15.083J/6.859J Integer Optimization Lecture 10: Solving Relaxations 1 Outline The key geometric result behind the ellipsoid method Slide 1 The ellipsoid method for the feasibility problem The ellipsoid
Week 8. 1 LP is easy: the Ellipsoid Method
 Week 8 1 LP is easy: the Ellipsoid Method In 1979 Khachyan proved that LP is solvable in polynomial time by a method of shrinking ellipsoids. The running time is polynomial in the number of variables n,
Week 8 1 LP is easy: the Ellipsoid Method In 1979 Khachyan proved that LP is solvable in polynomial time by a method of shrinking ellipsoids. The running time is polynomial in the number of variables n,
Combinatorial Optimization Spring Term 2015 Rico Zenklusen. 2 a = ( 3 2 ) 1 E(a, A) = E(( 3 2 ), ( 4 0
 1 E(a, A) = E(( 3 2 ), ( 4 0") 3 2 a = ( 3 2 ) 1 E(a, A) = E(( 3 2 ), ( 4 0 0 1 )) 0 0 1 2 3 4 5 Figure 9: An example of an axis parallel ellipsoid E(a, A) in two dimensions. Notice that the eigenvectors of A correspond to the axes
3 2 a = ( 3 2 ) 1 E(a, A) = E(( 3 2 ), ( 4 0 0 1 )) 0 0 1 2 3 4 5 Figure 9: An example of an axis parallel ellipsoid E(a, A) in two dimensions. Notice that the eigenvectors of A correspond to the axes
Integer and Combinatorial Optimization: Introduction
 Integer and Combinatorial Optimization: Introduction John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA November 2018 Mitchell Introduction 1 / 18 Integer and Combinatorial Optimization
Integer and Combinatorial Optimization: Introduction John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA November 2018 Mitchell Introduction 1 / 18 Integer and Combinatorial Optimization
Topics in Theoretical Computer Science: An Algorithmist's Toolkit Fall 2007
 MIT OpenCourseWare http://ocw.mit.edu 18.409 Topics in Theoretical Computer Science: An Algorithmist's Toolkit Fall 2007 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
MIT OpenCourseWare http://ocw.mit.edu 18.409 Topics in Theoretical Computer Science: An Algorithmist's Toolkit Fall 2007 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.
Optimization Methods in Management Science
 Optimization Methods in Management Science MIT 15.05 Recitation 8 TAs: Giacomo Nannicini, Ebrahim Nasrabadi At the end of this recitation, students should be able to: 1. Derive Gomory cut from fractional
Optimization Methods in Management Science MIT 15.05 Recitation 8 TAs: Giacomo Nannicini, Ebrahim Nasrabadi At the end of this recitation, students should be able to: 1. Derive Gomory cut from fractional
LINEAR PROGRAMMING III
 LINEAR PROGRAMMING III ellipsoid algorithm combinatorial optimization matrix games open problems Lecture slides by Kevin Wayne Last updated on 7/25/17 11:09 AM LINEAR PROGRAMMING III ellipsoid algorithm
LINEAR PROGRAMMING III ellipsoid algorithm combinatorial optimization matrix games open problems Lecture slides by Kevin Wayne Last updated on 7/25/17 11:09 AM LINEAR PROGRAMMING III ellipsoid algorithm
CO 250 Final Exam Guide
 Spring 2017 CO 250 Final Exam Guide TABLE OF CONTENTS richardwu.ca CO 250 Final Exam Guide Introduction to Optimization Kanstantsin Pashkovich Spring 2017 University of Waterloo Last Revision: March 4,
Spring 2017 CO 250 Final Exam Guide TABLE OF CONTENTS richardwu.ca CO 250 Final Exam Guide Introduction to Optimization Kanstantsin Pashkovich Spring 2017 University of Waterloo Last Revision: March 4,
Polynomiality of Linear Programming
 Chapter 10 Polynomiality of Linear Programming In the previous section, we presented the Simplex Method. This method turns out to be very efficient for solving linear programmes in practice. While it is
Chapter 10 Polynomiality of Linear Programming In the previous section, we presented the Simplex Method. This method turns out to be very efficient for solving linear programmes in practice. While it is
Integer Programming ISE 418. Lecture 12. Dr. Ted Ralphs
 Integer Programming ISE 418 Lecture 12 Dr. Ted Ralphs ISE 418 Lecture 12 1 Reading for This Lecture Nemhauser and Wolsey Sections II.2.1 Wolsey Chapter 9 ISE 418 Lecture 12 2 Generating Stronger Valid
Integer Programming ISE 418 Lecture 12 Dr. Ted Ralphs ISE 418 Lecture 12 1 Reading for This Lecture Nemhauser and Wolsey Sections II.2.1 Wolsey Chapter 9 ISE 418 Lecture 12 2 Generating Stronger Valid
Section Notes 9. IP: Cutting Planes. Applied Math 121. Week of April 12, 2010
 Section Notes 9 IP: Cutting Planes Applied Math 121 Week of April 12, 2010 Goals for the week understand what a strong formulations is. be familiar with the cutting planes algorithm and the types of cuts
Section Notes 9 IP: Cutting Planes Applied Math 121 Week of April 12, 2010 Goals for the week understand what a strong formulations is. be familiar with the cutting planes algorithm and the types of cuts
Convex Geometry. Carsten Schütt
 Convex Geometry Carsten Schütt November 25, 2006 2 Contents 0.1 Convex sets... 4 0.2 Separation.... 9 0.3 Extreme points..... 15 0.4 Blaschke selection principle... 18 0.5 Polytopes and polyhedra.... 23
Convex Geometry Carsten Schütt November 25, 2006 2 Contents 0.1 Convex sets... 4 0.2 Separation.... 9 0.3 Extreme points..... 15 0.4 Blaschke selection principle... 18 0.5 Polytopes and polyhedra.... 23
CS Algorithms and Complexity
 CS 50 - Algorithms and Complexity Linear Programming, the Simplex Method, and Hard Problems Sean Anderson 2/15/18 Portland State University Table of contents 1. The Simplex Method 2. The Graph Problem
CS 50 - Algorithms and Complexity Linear Programming, the Simplex Method, and Hard Problems Sean Anderson 2/15/18 Portland State University Table of contents 1. The Simplex Method 2. The Graph Problem
A notion of Total Dual Integrality for Convex, Semidefinite and Extended Formulations
 A notion of for Convex, Semidefinite and Extended Formulations Marcel de Carli Silva Levent Tunçel April 26, 2018 A vector in R n is integral if each of its components is an integer, A vector in R n is
A notion of for Convex, Semidefinite and Extended Formulations Marcel de Carli Silva Levent Tunçel April 26, 2018 A vector in R n is integral if each of its components is an integer, A vector in R n is
CS 6820 Fall 2014 Lectures, October 3-20, 2014
 Analysis of Algorithms Linear Programming Notes CS 6820 Fall 2014 Lectures, October 3-20, 2014 1 Linear programming The linear programming (LP) problem is the following optimization problem. We are given
Analysis of Algorithms Linear Programming Notes CS 6820 Fall 2014 Lectures, October 3-20, 2014 1 Linear programming The linear programming (LP) problem is the following optimization problem. We are given
Network Flows. 6. Lagrangian Relaxation. Programming. Fall 2010 Instructor: Dr. Masoud Yaghini
 In the name of God Network Flows 6. Lagrangian Relaxation 6.3 Lagrangian Relaxation and Integer Programming Fall 2010 Instructor: Dr. Masoud Yaghini Integer Programming Outline Branch-and-Bound Technique
In the name of God Network Flows 6. Lagrangian Relaxation 6.3 Lagrangian Relaxation and Integer Programming Fall 2010 Instructor: Dr. Masoud Yaghini Integer Programming Outline Branch-and-Bound Technique
Motivating examples Introduction to algorithms Simplex algorithm. On a particular example General algorithm. Duality An application to game theory
 Instructor: Shengyu Zhang 1 LP Motivating examples Introduction to algorithms Simplex algorithm On a particular example General algorithm Duality An application to game theory 2 Example 1: profit maximization
Instructor: Shengyu Zhang 1 LP Motivating examples Introduction to algorithms Simplex algorithm On a particular example General algorithm Duality An application to game theory 2 Example 1: profit maximization
CSC Linear Programming and Combinatorial Optimization Lecture 8: Ellipsoid Algorithm
 CSC2411 - Linear Programming and Combinatorial Optimization Lecture 8: Ellipsoid Algorithm Notes taken by Shizhong Li March 15, 2005 Summary: In the spring of 1979, the Soviet mathematician L.G.Khachian
CSC2411 - Linear Programming and Combinatorial Optimization Lecture 8: Ellipsoid Algorithm Notes taken by Shizhong Li March 15, 2005 Summary: In the spring of 1979, the Soviet mathematician L.G.Khachian
Integer and Combinatorial Optimization: The Cut Generation LP
 Integer and Combinatorial Optimization: The Cut Generation LP John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA March 2019 Mitchell The Cut Generation LP 1 / 15 General disjunctions
Integer and Combinatorial Optimization: The Cut Generation LP John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA March 2019 Mitchell The Cut Generation LP 1 / 15 General disjunctions
Integer Programming ISE 418. Lecture 13. Dr. Ted Ralphs
 Integer Programming ISE 418 Lecture 13 Dr. Ted Ralphs ISE 418 Lecture 13 1 Reading for This Lecture Nemhauser and Wolsey Sections II.1.1-II.1.3, II.1.6 Wolsey Chapter 8 CCZ Chapters 5 and 6 Valid Inequalities
Integer Programming ISE 418 Lecture 13 Dr. Ted Ralphs ISE 418 Lecture 13 1 Reading for This Lecture Nemhauser and Wolsey Sections II.1.1-II.1.3, II.1.6 Wolsey Chapter 8 CCZ Chapters 5 and 6 Valid Inequalities
IE 5531: Engineering Optimization I
 IE 5531: Engineering Optimization I Lecture 15: Nonlinear optimization Prof. John Gunnar Carlsson November 1, 2010 Prof. John Gunnar Carlsson IE 5531: Engineering Optimization I November 1, 2010 1 / 24
IE 5531: Engineering Optimization I Lecture 15: Nonlinear optimization Prof. John Gunnar Carlsson November 1, 2010 Prof. John Gunnar Carlsson IE 5531: Engineering Optimization I November 1, 2010 1 / 24
Lecture 1: Convex Sets January 23
 IE 521: Convex Optimization Instructor: Niao He Lecture 1: Convex Sets January 23 Spring 2017, UIUC Scribe: Niao He Courtesy warning: These notes do not necessarily cover everything discussed in the class.
IE 521: Convex Optimization Instructor: Niao He Lecture 1: Convex Sets January 23 Spring 2017, UIUC Scribe: Niao He Courtesy warning: These notes do not necessarily cover everything discussed in the class.
Topics in Theoretical Computer Science April 08, Lecture 8
 Topics in Theoretical Computer Science April 08, 204 Lecture 8 Lecturer: Ola Svensson Scribes: David Leydier and Samuel Grütter Introduction In this lecture we will introduce Linear Programming. It was
Topics in Theoretical Computer Science April 08, 204 Lecture 8 Lecturer: Ola Svensson Scribes: David Leydier and Samuel Grütter Introduction In this lecture we will introduce Linear Programming. It was
LP Duality: outline. Duality theory for Linear Programming. alternatives. optimization I Idea: polyhedra
 LP Duality: outline I Motivation and definition of a dual LP I Weak duality I Separating hyperplane theorem and theorems of the alternatives I Strong duality and complementary slackness I Using duality
LP Duality: outline I Motivation and definition of a dual LP I Weak duality I Separating hyperplane theorem and theorems of the alternatives I Strong duality and complementary slackness I Using duality
Today s class. Constrained optimization Linear programming. Prof. Jinbo Bi CSE, UConn. Numerical Methods, Fall 2011 Lecture 12
 Today s class Constrained optimization Linear programming 1 Midterm Exam 1 Count: 26 Average: 73.2 Median: 72.5 Maximum: 100.0 Minimum: 45.0 Standard Deviation: 17.13 Numerical Methods Fall 2011 2 Optimization
Today s class Constrained optimization Linear programming 1 Midterm Exam 1 Count: 26 Average: 73.2 Median: 72.5 Maximum: 100.0 Minimum: 45.0 Standard Deviation: 17.13 Numerical Methods Fall 2011 2 Optimization
A Review of Linear Programming
 A Review of Linear Programming Instructor: Farid Alizadeh IEOR 4600y Spring 2001 February 14, 2001 1 Overview In this note we review the basic properties of linear programming including the primal simplex
A Review of Linear Programming Instructor: Farid Alizadeh IEOR 4600y Spring 2001 February 14, 2001 1 Overview In this note we review the basic properties of linear programming including the primal simplex
A Strongly Polynomial Simplex Method for Totally Unimodular LP
 A Strongly Polynomial Simplex Method for Totally Unimodular LP Shinji Mizuno July 19, 2014 Abstract Kitahara and Mizuno get new bounds for the number of distinct solutions generated by the simplex method
A Strongly Polynomial Simplex Method for Totally Unimodular LP Shinji Mizuno July 19, 2014 Abstract Kitahara and Mizuno get new bounds for the number of distinct solutions generated by the simplex method
Spring 2017 CO 250 Course Notes TABLE OF CONTENTS. richardwu.ca. CO 250 Course Notes. Introduction to Optimization
 Spring 2017 CO 250 Course Notes TABLE OF CONTENTS richardwu.ca CO 250 Course Notes Introduction to Optimization Kanstantsin Pashkovich Spring 2017 University of Waterloo Last Revision: March 4, 2018 Table
Spring 2017 CO 250 Course Notes TABLE OF CONTENTS richardwu.ca CO 250 Course Notes Introduction to Optimization Kanstantsin Pashkovich Spring 2017 University of Waterloo Last Revision: March 4, 2018 Table
Math Models of OR: The Revised Simplex Method
 Math Models of OR: The Revised Simplex Method John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA September 2018 Mitchell The Revised Simplex Method 1 / 25 Motivation Outline 1
Math Models of OR: The Revised Simplex Method John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA September 2018 Mitchell The Revised Simplex Method 1 / 25 Motivation Outline 1
AN INTRODUCTION TO CONVEXITY
 AN INTRODUCTION TO CONVEXITY GEIR DAHL NOVEMBER 2010 University of Oslo, Centre of Mathematics for Applications, P.O.Box 1053, Blindern, 0316 Oslo, Norway (geird@math.uio.no) Contents 1 The basic concepts
AN INTRODUCTION TO CONVEXITY GEIR DAHL NOVEMBER 2010 University of Oslo, Centre of Mathematics for Applications, P.O.Box 1053, Blindern, 0316 Oslo, Norway (geird@math.uio.no) Contents 1 The basic concepts
Section Notes 8. Integer Programming II. Applied Math 121. Week of April 5, expand your knowledge of big M s and logical constraints.
 Section Notes 8 Integer Programming II Applied Math 121 Week of April 5, 2010 Goals for the week understand IP relaxations be able to determine the relative strength of formulations understand the branch
Section Notes 8 Integer Programming II Applied Math 121 Week of April 5, 2010 Goals for the week understand IP relaxations be able to determine the relative strength of formulations understand the branch
CSC373: Algorithm Design, Analysis and Complexity Fall 2017 DENIS PANKRATOV NOVEMBER 1, 2017
 CSC373: Algorithm Design, Analysis and Complexity Fall 2017 DENIS PANKRATOV NOVEMBER 1, 2017 Linear Function f: R n R is linear if it can be written as f x = a T x for some a R n Example: f x 1, x 2 =
CSC373: Algorithm Design, Analysis and Complexity Fall 2017 DENIS PANKRATOV NOVEMBER 1, 2017 Linear Function f: R n R is linear if it can be written as f x = a T x for some a R n Example: f x 1, x 2 =
Introduction to Proofs
 Real Analysis Preview May 2014 Properties of R n Recall Oftentimes in multivariable calculus, we looked at properties of vectors in R n. If we were given vectors x =< x 1, x 2,, x n > and y =< y1, y 2,,
Real Analysis Preview May 2014 Properties of R n Recall Oftentimes in multivariable calculus, we looked at properties of vectors in R n. If we were given vectors x =< x 1, x 2,, x n > and y =< y1, y 2,,
Linear Programming. Chapter Introduction
 Chapter 3 Linear Programming Linear programs (LP) play an important role in the theory and practice of optimization problems. Many COPs can directly be formulated as LPs. Furthermore, LPs are invaluable
Chapter 3 Linear Programming Linear programs (LP) play an important role in the theory and practice of optimization problems. Many COPs can directly be formulated as LPs. Furthermore, LPs are invaluable
Asymptotic Analysis. Slides by Carl Kingsford. Jan. 27, AD Chapter 2
 Asymptotic Analysis Slides by Carl Kingsford Jan. 27, 2014 AD Chapter 2 Independent Set Definition (Independent Set). Given a graph G = (V, E) an independent set is a set S V if no two nodes in S are joined
Asymptotic Analysis Slides by Carl Kingsford Jan. 27, 2014 AD Chapter 2 Independent Set Definition (Independent Set). Given a graph G = (V, E) an independent set is a set S V if no two nodes in S are joined
A Redundant Klee-Minty Construction with All the Redundant Constraints Touching the Feasible Region
 A Redundant Klee-Minty Construction with All the Redundant Constraints Touching the Feasible Region Eissa Nematollahi Tamás Terlaky January 5, 2008 Abstract By introducing some redundant Klee-Minty constructions,
A Redundant Klee-Minty Construction with All the Redundant Constraints Touching the Feasible Region Eissa Nematollahi Tamás Terlaky January 5, 2008 Abstract By introducing some redundant Klee-Minty constructions,
Review Solutions, Exam 2, Operations Research
 Review Solutions, Exam 2, Operations Research 1. Prove the weak duality theorem: For any x feasible for the primal and y feasible for the dual, then... HINT: Consider the quantity y T Ax. SOLUTION: To
Review Solutions, Exam 2, Operations Research 1. Prove the weak duality theorem: For any x feasible for the primal and y feasible for the dual, then... HINT: Consider the quantity y T Ax. SOLUTION: To
Travelling Salesman Problem
 Travelling Salesman Problem Fabio Furini November 10th, 2014 Travelling Salesman Problem 1 Outline 1 Traveling Salesman Problem Separation Travelling Salesman Problem 2 (Asymmetric) Traveling Salesman
Travelling Salesman Problem Fabio Furini November 10th, 2014 Travelling Salesman Problem 1 Outline 1 Traveling Salesman Problem Separation Travelling Salesman Problem 2 (Asymmetric) Traveling Salesman
Math 421, Homework #9 Solutions
 Math 41, Homework #9 Solutions (1) (a) A set E R n is said to be path connected if for any pair of points x E and y E there exists a continuous function γ : [0, 1] R n satisfying γ(0) = x, γ(1) = y, and
Math 41, Homework #9 Solutions (1) (a) A set E R n is said to be path connected if for any pair of points x E and y E there exists a continuous function γ : [0, 1] R n satisfying γ(0) = x, γ(1) = y, and
Convex Sets. Prof. Dan A. Simovici UMB
 Convex Sets Prof. Dan A. Simovici UMB 1 / 57 Outline 1 Closures, Interiors, Borders of Sets in R n 2 Segments and Convex Sets 3 Properties of the Class of Convex Sets 4 Closure and Interior Points of Convex
Convex Sets Prof. Dan A. Simovici UMB 1 / 57 Outline 1 Closures, Interiors, Borders of Sets in R n 2 Segments and Convex Sets 3 Properties of the Class of Convex Sets 4 Closure and Interior Points of Convex
Computational Complexity. IE 496 Lecture 6. Dr. Ted Ralphs
 Computational Complexity IE 496 Lecture 6 Dr. Ted Ralphs IE496 Lecture 6 1 Reading for This Lecture N&W Sections I.5.1 and I.5.2 Wolsey Chapter 6 Kozen Lectures 21-25 IE496 Lecture 6 2 Introduction to
Computational Complexity IE 496 Lecture 6 Dr. Ted Ralphs IE496 Lecture 6 1 Reading for This Lecture N&W Sections I.5.1 and I.5.2 Wolsey Chapter 6 Kozen Lectures 21-25 IE496 Lecture 6 2 Introduction to
COMP3121/9101/3821/9801 Lecture Notes. Linear Programming
 COMP3121/9101/3821/9801 Lecture Notes Linear Programming LiC: Aleks Ignjatovic THE UNIVERSITY OF NEW SOUTH WALES School of Computer Science and Engineering The University of New South Wales Sydney 2052,
COMP3121/9101/3821/9801 Lecture Notes Linear Programming LiC: Aleks Ignjatovic THE UNIVERSITY OF NEW SOUTH WALES School of Computer Science and Engineering The University of New South Wales Sydney 2052,
Algorithmic Convex Geometry
 Algorithmic Convex Geometry August 2011 2 Contents 1 Overview 5 1.1 Learning by random sampling.................. 5 2 The Brunn-Minkowski Inequality 7 2.1 The inequality.......................... 8 2.1.1
Algorithmic Convex Geometry August 2011 2 Contents 1 Overview 5 1.1 Learning by random sampling.................. 5 2 The Brunn-Minkowski Inequality 7 2.1 The inequality.......................... 8 2.1.1
The simplex algorithm
 The simplex algorithm The simplex algorithm is the classical method for solving linear programs. Its running time is not polynomial in the worst case. It does yield insight into linear programs, however,
The simplex algorithm The simplex algorithm is the classical method for solving linear programs. Its running time is not polynomial in the worst case. It does yield insight into linear programs, however,
IE 521 Convex Optimization
 Lecture 1: 16th January 2019 Outline 1 / 20 Which set is different from others? Figure: Four sets 2 / 20 Which set is different from others? Figure: Four sets 3 / 20 Interior, Closure, Boundary Definition.
Lecture 1: 16th January 2019 Outline 1 / 20 Which set is different from others? Figure: Four sets 2 / 20 Which set is different from others? Figure: Four sets 3 / 20 Interior, Closure, Boundary Definition.
CS599: Convex and Combinatorial Optimization Fall 2013 Lecture 17: Combinatorial Problems as Linear Programs III. Instructor: Shaddin Dughmi
 CS599: Convex and Combinatorial Optimization Fall 2013 Lecture 17: Combinatorial Problems as Linear Programs III Instructor: Shaddin Dughmi Announcements Today: Spanning Trees and Flows Flexibility awarded
CS599: Convex and Combinatorial Optimization Fall 2013 Lecture 17: Combinatorial Problems as Linear Programs III Instructor: Shaddin Dughmi Announcements Today: Spanning Trees and Flows Flexibility awarded
Lecture 25 of 42. PAC Learning, VC Dimension, and Mistake Bounds
 Lecture 25 of 42 PAC Learning, VC Dimension, and Mistake Bounds Thursday, 15 March 2007 William H. Hsu, KSU http://www.kddresearch.org/courses/spring2007/cis732 Readings: Sections 7.4.17.4.3, 7.5.17.5.3,
Lecture 25 of 42 PAC Learning, VC Dimension, and Mistake Bounds Thursday, 15 March 2007 William H. Hsu, KSU http://www.kddresearch.org/courses/spring2007/cis732 Readings: Sections 7.4.17.4.3, 7.5.17.5.3,
Lecture #21. c T x Ax b. maximize subject to
 COMPSCI 330: Design and Analysis of Algorithms 11/11/2014 Lecture #21 Lecturer: Debmalya Panigrahi Scribe: Samuel Haney 1 Overview In this lecture, we discuss linear programming. We first show that the
COMPSCI 330: Design and Analysis of Algorithms 11/11/2014 Lecture #21 Lecturer: Debmalya Panigrahi Scribe: Samuel Haney 1 Overview In this lecture, we discuss linear programming. We first show that the
CSC Design and Analysis of Algorithms. LP Shader Electronics Example
 CSC 80- Design and Analysis of Algorithms Lecture (LP) LP Shader Electronics Example The Shader Electronics Company produces two products:.eclipse, a portable touchscreen digital player; it takes hours
CSC 80- Design and Analysis of Algorithms Lecture (LP) LP Shader Electronics Example The Shader Electronics Company produces two products:.eclipse, a portable touchscreen digital player; it takes hours
15-780: LinearProgramming
 15-780: LinearProgramming J. Zico Kolter February 1-3, 2016 1 Outline Introduction Some linear algebra review Linear programming Simplex algorithm Duality and dual simplex 2 Outline Introduction Some linear
15-780: LinearProgramming J. Zico Kolter February 1-3, 2016 1 Outline Introduction Some linear algebra review Linear programming Simplex algorithm Duality and dual simplex 2 Outline Introduction Some linear
Two Lectures on the Ellipsoid Method for Solving Linear Programs
 Two Lectures on the Ellipsoid Method for Solving Linear Programs Lecture : A polynomial-time algorithm for LP Consider the general linear programming problem: δ = max cx S.T. Ax b, x R n, () where A =
Two Lectures on the Ellipsoid Method for Solving Linear Programs Lecture : A polynomial-time algorithm for LP Consider the general linear programming problem: δ = max cx S.T. Ax b, x R n, () where A =
Lecture 1: Background on Convex Analysis
 Lecture 1: Background on Convex Analysis John Duchi PCMI 2016 Outline I Convex sets 1.1 Definitions and examples 2.2 Basic properties 3.3 Projections onto convex sets 4.4 Separating and supporting hyperplanes
Lecture 1: Background on Convex Analysis John Duchi PCMI 2016 Outline I Convex sets 1.1 Definitions and examples 2.2 Basic properties 3.3 Projections onto convex sets 4.4 Separating and supporting hyperplanes
Integer Linear Programs
 Lecture 2: Review, Linear Programming Relaxations Today we will talk about expressing combinatorial problems as mathematical programs, specifically Integer Linear Programs (ILPs). We then see what happens
Lecture 2: Review, Linear Programming Relaxations Today we will talk about expressing combinatorial problems as mathematical programs, specifically Integer Linear Programs (ILPs). We then see what happens
Convex optimization COMS 4771
 Convex optimization COMS 4771 1. Recap: learning via optimization Soft-margin SVMs Soft-margin SVM optimization problem defined by training data: w R d λ 2 w 2 2 + 1 n n [ ] 1 y ix T i w. + 1 / 15 Soft-margin
Convex optimization COMS 4771 1. Recap: learning via optimization Soft-margin SVMs Soft-margin SVM optimization problem defined by training data: w R d λ 2 w 2 2 + 1 n n [ ] 1 y ix T i w. + 1 / 15 Soft-margin
Chapter 11. Approximation Algorithms. Slides by Kevin Wayne Pearson-Addison Wesley. All rights reserved.
 Chapter 11 Approximation Algorithms Slides by Kevin Wayne. Copyright @ 2005 Pearson-Addison Wesley. All rights reserved. 1 Approximation Algorithms Q. Suppose I need to solve an NP-hard problem. What should
Chapter 11 Approximation Algorithms Slides by Kevin Wayne. Copyright @ 2005 Pearson-Addison Wesley. All rights reserved. 1 Approximation Algorithms Q. Suppose I need to solve an NP-hard problem. What should
Combinatorial Optimization
 Combinatorial Optimization Lecture notes, WS 2010/11, TU Munich Prof. Dr. Raymond Hemmecke Version of February 9, 2011 Contents 1 The knapsack problem 1 1.1 Complete enumeration..................................
Combinatorial Optimization Lecture notes, WS 2010/11, TU Munich Prof. Dr. Raymond Hemmecke Version of February 9, 2011 Contents 1 The knapsack problem 1 1.1 Complete enumeration..................................
Name (print): Question 4. exercise 1.24 (compute the union, then the intersection of two sets)
: Question 4. exercise 1.24 (compute the union, then the intersection of two sets)") MTH299 - Homework 1 Question 1. exercise 1.10 (compute the cardinality of a handful of finite sets) Solution. Write your answer here. Question 2. exercise 1.20 (compute the union of two sets) Question
MTH299 - Homework 1 Question 1. exercise 1.10 (compute the cardinality of a handful of finite sets) Solution. Write your answer here. Question 2. exercise 1.20 (compute the union of two sets) Question
47-831: Advanced Integer Programming Lecturer: Amitabh Basu Lecture 2 Date: 03/18/2010
 47-831: Advanced Integer Programming Lecturer: Amitabh Basu Lecture Date: 03/18/010 We saw in the previous lecture that a lattice Λ can have many bases. In fact, if Λ is a lattice of a subspace L with
47-831: Advanced Integer Programming Lecturer: Amitabh Basu Lecture Date: 03/18/010 We saw in the previous lecture that a lattice Λ can have many bases. In fact, if Λ is a lattice of a subspace L with
Succinct linear programs for easy problems
 Succinct linear programs for easy problems David Bremner U. New Brunswick / visiting TU Berlin 24-11-2014 Joint Work with D. Avis, H.R. Tiwary, and O. Watanabe Outline 1 Matchings and Matching Polytopes
Succinct linear programs for easy problems David Bremner U. New Brunswick / visiting TU Berlin 24-11-2014 Joint Work with D. Avis, H.R. Tiwary, and O. Watanabe Outline 1 Matchings and Matching Polytopes
Preliminaries and Complexity Theory
 Preliminaries and Complexity Theory Oleksandr Romanko CAS 746 - Advanced Topics in Combinatorial Optimization McMaster University, January 16, 2006 Introduction Book structure: 2 Part I Linear Algebra
Preliminaries and Complexity Theory Oleksandr Romanko CAS 746 - Advanced Topics in Combinatorial Optimization McMaster University, January 16, 2006 Introduction Book structure: 2 Part I Linear Algebra
Math Models of OR: Traveling Salesman Problem
 Math Models of OR: Traveling Salesman Problem John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA November 2018 Mitchell Traveling Salesman Problem 1 / 19 Outline 1 Examples 2
Math Models of OR: Traveling Salesman Problem John E. Mitchell Department of Mathematical Sciences RPI, Troy, NY 12180 USA November 2018 Mitchell Traveling Salesman Problem 1 / 19 Outline 1 Examples 2
HW1 solutions. 1. α Ef(x) β, where Ef(x) is the expected value of f(x), i.e., Ef(x) = n. i=1 p if(a i ). (The function f : R R is given.
 β, where Ef(x) is the expected value of f(x), i.e., Ef(x) = n. i=1 p if(a i ). (The function f : R R is given.") HW1 solutions Exercise 1 (Some sets of probability distributions.) Let x be a real-valued random variable with Prob(x = a i ) = p i, i = 1,..., n, where a 1 < a 2 < < a n. Of course p R n lies in the standard
HW1 solutions Exercise 1 (Some sets of probability distributions.) Let x be a real-valued random variable with Prob(x = a i ) = p i, i = 1,..., n, where a 1 < a 2 < < a n. Of course p R n lies in the standard
Primal/Dual Decomposition Methods
 Primal/Dual Decomposition Methods Daniel P. Palomar Hong Kong University of Science and Technology (HKUST) ELEC5470 - Convex Optimization Fall 2018-19, HKUST, Hong Kong Outline of Lecture Subgradients
Primal/Dual Decomposition Methods Daniel P. Palomar Hong Kong University of Science and Technology (HKUST) ELEC5470 - Convex Optimization Fall 2018-19, HKUST, Hong Kong Outline of Lecture Subgradients
Separation Techniques for Constrained Nonlinear 0 1 Programming
 Separation Techniques for Constrained Nonlinear 0 1 Programming Christoph Buchheim Computer Science Department, University of Cologne and DEIS, University of Bologna MIP 2008, Columbia University, New
Separation Techniques for Constrained Nonlinear 0 1 Programming Christoph Buchheim Computer Science Department, University of Cologne and DEIS, University of Bologna MIP 2008, Columbia University, New
2.4 Hilbert Spaces. Outline
 2.4 Hilbert Spaces Tom Lewis Spring Semester 2017 Outline Hilbert spaces L 2 ([a, b]) Orthogonality Approximations Definition A Hilbert space is an inner product space which is complete in the norm defined
2.4 Hilbert Spaces Tom Lewis Spring Semester 2017 Outline Hilbert spaces L 2 ([a, b]) Orthogonality Approximations Definition A Hilbert space is an inner product space which is complete in the norm defined
LMI MODELLING 4. CONVEX LMI MODELLING. Didier HENRION. LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ. Universidad de Valladolid, SP March 2009
 LMI MODELLING 4. CONVEX LMI MODELLING Didier HENRION LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ Universidad de Valladolid, SP March 2009 Minors A minor of a matrix F is the determinant of a submatrix
LMI MODELLING 4. CONVEX LMI MODELLING Didier HENRION LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ Universidad de Valladolid, SP March 2009 Minors A minor of a matrix F is the determinant of a submatrix
Combinatorial Optimization
 Combinatorial Optimization 2017-2018 1 Maximum matching on bipartite graphs Given a graph G = (V, E), find a maximum cardinal matching. 1.1 Direct algorithms Theorem 1.1 (Petersen, 1891) A matching M is
Combinatorial Optimization 2017-2018 1 Maximum matching on bipartite graphs Given a graph G = (V, E), find a maximum cardinal matching. 1.1 Direct algorithms Theorem 1.1 (Petersen, 1891) A matching M is
6.854J / J Advanced Algorithms Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 6.854J / 18.415J Advanced Algorithms Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.415/6.854 Advanced
MIT OpenCourseWare http://ocw.mit.edu 6.854J / 18.415J Advanced Algorithms Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 18.415/6.854 Advanced
DO NOT OPEN THIS QUESTION BOOKLET UNTIL YOU ARE TOLD TO DO SO
 QUESTION BOOKLET EECS 227A Fall 2009 Midterm Tuesday, Ocotober 20, 11:10-12:30pm DO NOT OPEN THIS QUESTION BOOKLET UNTIL YOU ARE TOLD TO DO SO You have 80 minutes to complete the midterm. The midterm consists
QUESTION BOOKLET EECS 227A Fall 2009 Midterm Tuesday, Ocotober 20, 11:10-12:30pm DO NOT OPEN THIS QUESTION BOOKLET UNTIL YOU ARE TOLD TO DO SO You have 80 minutes to complete the midterm. The midterm consists
Introduction to Mathematical Programming IE406. Lecture 21. Dr. Ted Ralphs
 Introduction to Mathematical Programming IE406 Lecture 21 Dr. Ted Ralphs IE406 Lecture 21 1 Reading for This Lecture Bertsimas Sections 10.2, 10.3, 11.1, 11.2 IE406 Lecture 21 2 Branch and Bound Branch
Introduction to Mathematical Programming IE406 Lecture 21 Dr. Ted Ralphs IE406 Lecture 21 1 Reading for This Lecture Bertsimas Sections 10.2, 10.3, 11.1, 11.2 IE406 Lecture 21 2 Branch and Bound Branch
1 Column Generation and the Cutting Stock Problem
 1 Column Generation and the Cutting Stock Problem In the linear programming approach to the traveling salesman problem we used the cutting plane approach. The cutting plane approach is appropriate when
1 Column Generation and the Cutting Stock Problem In the linear programming approach to the traveling salesman problem we used the cutting plane approach. The cutting plane approach is appropriate when
Lecture 8. Strong Duality Results. September 22, 2008
 Strong Duality Results September 22, 2008 Outline Lecture 8 Slater Condition and its Variations Convex Objective with Linear Inequality Constraints Quadratic Objective over Quadratic Constraints Representation
Strong Duality Results September 22, 2008 Outline Lecture 8 Slater Condition and its Variations Convex Objective with Linear Inequality Constraints Quadratic Objective over Quadratic Constraints Representation
Introduction to Real Analysis Alternative Chapter 1
 Christopher Heil Introduction to Real Analysis Alternative Chapter 1 A Primer on Norms and Banach Spaces Last Updated: March 10, 2018 c 2018 by Christopher Heil Chapter 1 A Primer on Norms and Banach Spaces
Christopher Heil Introduction to Real Analysis Alternative Chapter 1 A Primer on Norms and Banach Spaces Last Updated: March 10, 2018 c 2018 by Christopher Heil Chapter 1 A Primer on Norms and Banach Spaces
Lakehead University ECON 4117/5111 Mathematical Economics Fall 2003
 Test 1 September 26, 2003 1. Construct a truth table to prove each of the following tautologies (p, q, r are statements and c is a contradiction): (a) [p (q r)] [(p q) r] (b) (p q) [(p q) c] 2. Answer
Test 1 September 26, 2003 1. Construct a truth table to prove each of the following tautologies (p, q, r are statements and c is a contradiction): (a) [p (q r)] [(p q) r] (b) (p q) [(p q) c] 2. Answer
March 25, 2010 CHAPTER 2: LIMITS AND CONTINUITY OF FUNCTIONS IN EUCLIDEAN SPACE
 March 25, 2010 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 1. calar product in R n Definition 1.1. Given x = (x 1,..., x n ), y = (y 1,..., y n ) R n,we define their scalar product as
March 25, 2010 CHAPTER 2: LIMIT AND CONTINUITY OF FUNCTION IN EUCLIDEAN PACE 1. calar product in R n Definition 1.1. Given x = (x 1,..., x n ), y = (y 1,..., y n ) R n,we define their scalar product as
Massachusetts Institute of Technology 6.854J/18.415J: Advanced Algorithms Friday, March 18, 2016 Ankur Moitra. Problem Set 6
 Massachusetts Institute of Technology 6.854J/18.415J: Advanced Algorithms Friday, March 18, 2016 Ankur Moitra Problem Set 6 Due: Wednesday, April 6, 2016 7 pm Dropbox Outside Stata G5 Collaboration policy:
Massachusetts Institute of Technology 6.854J/18.415J: Advanced Algorithms Friday, March 18, 2016 Ankur Moitra Problem Set 6 Due: Wednesday, April 6, 2016 7 pm Dropbox Outside Stata G5 Collaboration policy:
The Simplex Algorithm: Technicalities 1
 1/45 The Simplex Algorithm: Technicalities 1 Adrian Vetta 1 This presentation is based upon the book Linear Programming by Vasek Chvatal 2/45 Two Issues Here we discuss two potential problems with the
1/45 The Simplex Algorithm: Technicalities 1 Adrian Vetta 1 This presentation is based upon the book Linear Programming by Vasek Chvatal 2/45 Two Issues Here we discuss two potential problems with the
9. Geometric problems
 9. Geometric problems EE/AA 578, Univ of Washington, Fall 2016 projection on a set extremal volume ellipsoids centering classification 9 1 Projection on convex set projection of point x on set C defined
9. Geometric problems EE/AA 578, Univ of Washington, Fall 2016 projection on a set extremal volume ellipsoids centering classification 9 1 Projection on convex set projection of point x on set C defined
Iterative Rounding and Relaxation
 Iterative Rounding and Relaxation James Davis Department of Computer Science Rutgers University Camden jamesdav@camden.rutgers.edu March 11, 2010 James Davis (Rutgers Camden) Iterative Rounding 1 / 58
Iterative Rounding and Relaxation James Davis Department of Computer Science Rutgers University Camden jamesdav@camden.rutgers.edu March 11, 2010 James Davis (Rutgers Camden) Iterative Rounding 1 / 58
8. Geometric problems
 8. Geometric problems Convex Optimization Boyd & Vandenberghe extremal volume ellipsoids centering classification placement and facility location 8 1 Minimum volume ellipsoid around a set Löwner-John ellipsoid
8. Geometric problems Convex Optimization Boyd & Vandenberghe extremal volume ellipsoids centering classification placement and facility location 8 1 Minimum volume ellipsoid around a set Löwner-John ellipsoid
MAT-INF4110/MAT-INF9110 Mathematical optimization
 MAT-INF4110/MAT-INF9110 Mathematical optimization Geir Dahl August 20, 2013 Convexity Part IV Chapter 4 Representation of convex sets different representations of convex sets, boundary polyhedra and polytopes:
MAT-INF4110/MAT-INF9110 Mathematical optimization Geir Dahl August 20, 2013 Convexity Part IV Chapter 4 Representation of convex sets different representations of convex sets, boundary polyhedra and polytopes:
3. Linear Programming and Polyhedral Combinatorics
 Massachusetts Institute of Technology 18.433: Combinatorial Optimization Michel X. Goemans February 28th, 2013 3. Linear Programming and Polyhedral Combinatorics Summary of what was seen in the introductory
Massachusetts Institute of Technology 18.433: Combinatorial Optimization Michel X. Goemans February 28th, 2013 3. Linear Programming and Polyhedral Combinatorics Summary of what was seen in the introductory
LECTURE 25: REVIEW/EPILOGUE LECTURE OUTLINE
 LECTURE 25: REVIEW/EPILOGUE LECTURE OUTLINE CONVEX ANALYSIS AND DUALITY Basic concepts of convex analysis Basic concepts of convex optimization Geometric duality framework - MC/MC Constrained optimization
LECTURE 25: REVIEW/EPILOGUE LECTURE OUTLINE CONVEX ANALYSIS AND DUALITY Basic concepts of convex analysis Basic concepts of convex optimization Geometric duality framework - MC/MC Constrained optimization
Locally convex spaces, the hyperplane separation theorem, and the Krein-Milman theorem
 56 Chapter 7 Locally convex spaces, the hyperplane separation theorem, and the Krein-Milman theorem Recall that C(X) is not a normed linear space when X is not compact. On the other hand we could use semi
56 Chapter 7 Locally convex spaces, the hyperplane separation theorem, and the Krein-Milman theorem Recall that C(X) is not a normed linear space when X is not compact. On the other hand we could use semi
Lecture 5: Computational Complexity
 Lecture 5: Computational Complexity (3 units) Outline Computational complexity Decision problem, Classes N P and P. Polynomial reduction and Class N PC P = N P or P = N P? 1 / 22 The Goal of Computational
Lecture 5: Computational Complexity (3 units) Outline Computational complexity Decision problem, Classes N P and P. Polynomial reduction and Class N PC P = N P or P = N P? 1 / 22 The Goal of Computational
Optimization methods NOPT048
 Optimization methods NOPT048 Jirka Fink https://ktiml.mff.cuni.cz/ fink/ Department of Theoretical Computer Science and Mathematical Logic Faculty of Mathematics and Physics Charles University in Prague
Optimization methods NOPT048 Jirka Fink https://ktiml.mff.cuni.cz/ fink/ Department of Theoretical Computer Science and Mathematical Logic Faculty of Mathematics and Physics Charles University in Prague
23. Cutting planes and branch & bound
 CS/ECE/ISyE 524 Introduction to Optimization Spring 207 8 23. Cutting planes and branch & bound ˆ Algorithms for solving MIPs ˆ Cutting plane methods ˆ Branch and bound methods Laurent Lessard (www.laurentlessard.com)
CS/ECE/ISyE 524 Introduction to Optimization Spring 207 8 23. Cutting planes and branch & bound ˆ Algorithms for solving MIPs ˆ Cutting plane methods ˆ Branch and bound methods Laurent Lessard (www.laurentlessard.com)