Area-PReserving Dynamics
|
|
|
- Everett Watts
- 5 years ago
- Views:
Transcription
1 Area-PReserving Dynamics James Meiss University of Colorado at Boulder NZMRI Summer Workshop Raglan, New Zealand, January 9 14, 2011
2 The Standard Map K(θ,t) Frictionless, horizontal Rotor θ I ω Moment of inertia I, angular momentum p I θ = K(θ,t) I θ = p p = K(θ,t) Kick, K, impulsively and periodically K(θ,t) = k(θ) j= δ(t jt)
3 The Standard Map Integrate from t = -ε to t = ε Then from t = ε to t = T ε θ(ε) = θ( ε) + 1 ε p(t)dt I ε p(ε) = p( ε) + k(θ(0)) θ(t ε) = θ(ε) + (T ε) p(ε) I p(t ε) = p(ε) put it together: p = p(-ε), p =p(τ ε), θ = θ + T I p p = p + k(θ)
4 The Standard Map Integrate from t = -ε to t = ε θ(ε) = θ( ε) + 0 p(ε) = p( ε) + k(θ(0)) Then from t = ε to t = T ε Let ε 0 θ(t ε) = θ(ε) + T I p(ε) p(t ε) = p(ε) put it together: p = p(-ε), p =p(τ ε), θ = θ + T I p p = p + k(θ)
5 Chirikov & Taylor Boris Chirikov: charged particles in electrostatic waves Brian Taylor: magnetic field lines in tokamaks Also: Frenkel-Kontorova model in solid-state physics Cyclotron
6 The Standard Map K sin(θ) Chirikov-Taylor Map Scale and rename variables x = x + y y = y k 2π sin(2πx) Split-step, Euler integrator for pendulum
7 ORbits x = x + y mod 1 y = y F(x) An orbit is a sequence: (x t,p t ), t integer If k = 0, orbits are simple x t = x 0 + y 0 t mod 1 y = y t 0 e.g. rigid rotation on circle if y is irrational, orbits are dense, otherwise periodic.


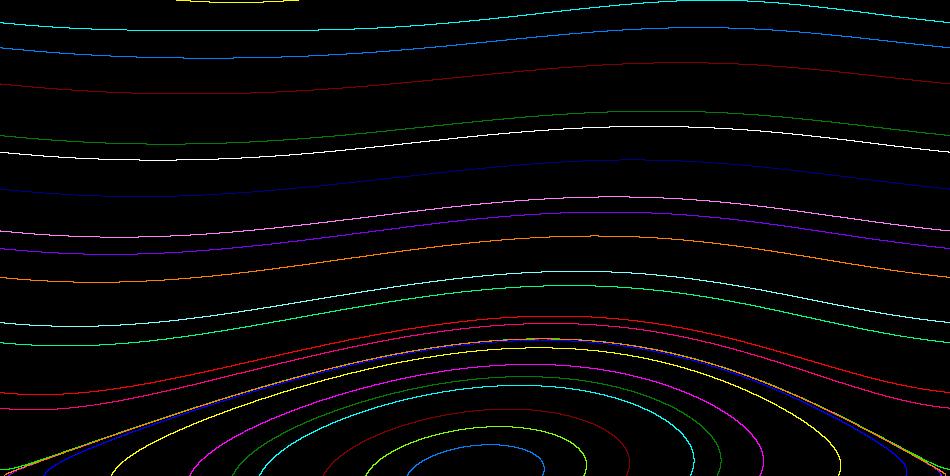
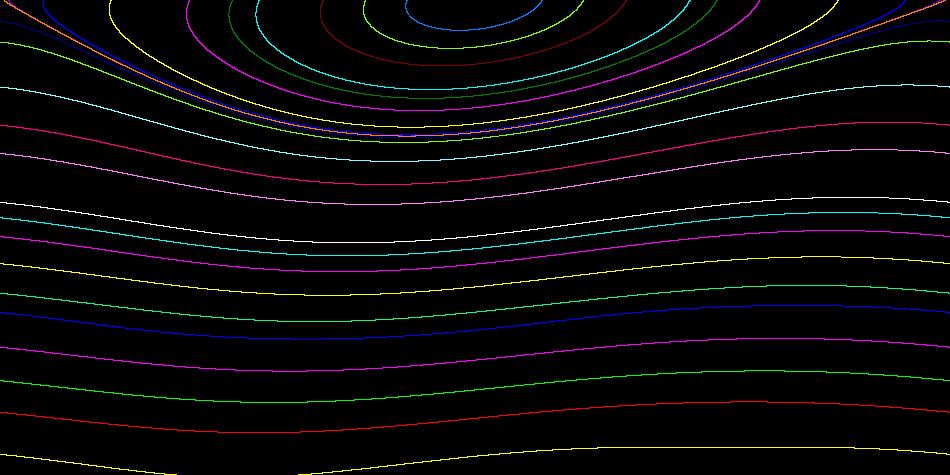
8 Phase Portraits k = 0.3 k = 0.971



9 Phase Portraits k = 2.0 k = 6.0
. Plenty of Elliptic Islands for the Standard Familty of Area Preserving Maps. Annales de L'institut Henri Poincare.")
10 Islands Everywhere? Chaotic region is a fat fractal Umberger, D. K. and J. D. Farmer (1985). Fat Fractals on the Energy Surface. Physical Review Letters 55: Genericity of islands Duarte, P. (1994). Plenty of Elliptic Islands for the Standard Familty of Area Preserving Maps. Annales de L'institut Henri Poincare. Analyse 11(4): 359.
11 INtegrability x = x + y mod 1 y = y F(x) An integral is a function left invariant by f I = I f Orbits must lie on contours I(x,y) = constant Integrable standard maps were classified by Suris, e.g., F(x) = 2 π arctan asin(2π x 1+ acos(2π x)
12 Periodic ORbits x = x + y mod 1 y = y F(x) Lift map to, x not mod 1 2 Type (p,q) periodic orbit (x, y ) = f q (x, y ) = (x + p, y ) (x, y ) q q Rotation number ρ=p/q (0,1): Fixed points (x,y) = (0,0), stable (elliptic) if 0 < k < 2 (x,y) = (0.5,0), unstable (hyperbolic) if 0 < k
13 STability x = x + y mod 1 y = y F(x) A periodic orbit is a fixed point of f n (x) Stability is governed by the 2x2 matrix Df n (x) Df (x, y) = 1 k cos(2π x) 1 k cos(2π x) 1 Multipliers (eigenvalues) λ 1 stable (x,y) = (0,0), stable (elliptic, λ = 1) if 0 < k < 2 (x,y) = (0.5,0), unstable (hyperbolic, 0 < λ 1 < 1 < λ 2 ) if 0 < k
14 Stability: The Residue det(df n ) = 1 λ 2 τλ +1 = 0 τ = tr(df n ) Greene s Residue: R = 1 4 ( 2 τ ) Elliptic modulus one multipliers λ = 1 τ 2 0 R τ R Hyperbolic real, positive multipliers 0 < λ 1 < 1 < λ 2 τ > 2 R < 0 Reflection Hyperbolic negative multipliers λ 1 < 1 < λ 2 < 0 τ < 2 R > 1
15 quasiperiodic Orbits For k = 0, y irrational: orbit dense on circle rotational invariant circle ω = y is irrational winding number Kolmogorov-Arnold-Moser (KAM) theory circles with sufficiently irrational ω persist for k small. Poincaré-Birkhoff: rational circles destroyed
16 quasiperiodic Orbits KAM Theory requires Diophantine Condition: Twist Condition: D c,τ = {ω : nω m > c n τ } x y (x, y) = 0 Smoothness: f C 3+ε (R 2 )
17 TWist τ = x' y x = x + y mod 1 y = y F(x) Twist is the rate of change of rotation frequency with amplitude i.e., anharmonicity (x,y) f Y(x ) (x,y ) Df(v) Twist is essential for x KAM theory (preservation of circles) Aubry-Mather theory (variational principles)

18 Twist x = x + y mod 1 y = y F(x)
19 Diophantine D c,τ = {ω : nω m > c n τ } If τ > 1, D c,τ is a Cantor set with measure meas(d c,τ ) c 0 1 Examples: Golden mean ( ) ω = γ = Algebraic irrationals: ω 2 + aω + b = 0, a,b Z Constant type Bounded c.f. elements ω = a 0 + a a = [a o ; a 1, a 2, ]
20 Reversibilty x = x + y mod 1 y = y F(x) A map f is reversible if it is the same as its inverse upon a change of coordinates: f S = S f 1 For an odd force F(x)=-F(-x) S 0 (x, y) = ( x, y + F(x)) S is an involution: S 2 = I. f = ( f S ) S = S S thus f is the composition of two involutions
21 Reversibilty x = x + y mod 1 y = y F(x) Symmetric orbits have points on fixed sets Fix(S 0 ) = {(0, y)} "#$ Fix(S 1 ) = {( 1 2 y, y)} %&'(#$ " * periodic orbits: if n=2k " %&'(#$ ) * (x 0, y 0 ) Fix(S 0 ), %&'(# ) * (x k, y k ) Fix(S 0 R m ) = { m 2, y} 1D secant: "#" %&'(# " * G(y 0 ) = x k (0, y 0 ) m 2!"#$!"#$ "#"! "#$
 = W u (SΛ)!\"#$!\"#$ \"#\"!")
22 Stable Manifolds W s { (Λ) (x, y) : f t } (x, y) Λ, as t "#$ Stable Manifolds for fixed points and periodic orbits " "#" Under reversor SW s (Λ) = W u (SΛ)!"#$!"#$ "#"! "#$ k = 1.2
-resonance zones!")
23 Resonance Zones Resonance zones bounded by initial segments of W u and W s. f h 0 h 1 All area not in rotational invariant circles filled by (p,q)-resonance zones! u W s W h -1 (0,1) Resonance s W u W Turnstiles give escaping flux, Area/iteration k=1.5
 0.3 0.2 0.1.1'...... I... I,'... 0-0.4-0.2 0 0.2 0.4 x k = 1.")
24 Resonance Zones For k > k cr resonances fill entire phase space! Chen, Q. (1987). Area as a Devil s Staircase in Twist Maps. Phys. Lett. A 123: I.Or b / 0.6 po ~ 0.4~ 0,2 O.~ 0.4 A(~) ' I... I,' x k = 1.97 o', 0'2 0'3 o4' 05 It Area Devil s Staircase
25 On to Twist Maps!
Symmetries. x = x + y k 2π sin(2πx), y = y k. 2π sin(2πx t). (3)
, y = y k. 2π sin(2πx t). (3)") The standard or Taylor Chirikov map is a family of area-preserving maps, z = f(z)where z = (x, y) is the original position and z = (x,y ) the new position after application of the map, which is defined
The standard or Taylor Chirikov map is a family of area-preserving maps, z = f(z)where z = (x, y) is the original position and z = (x,y ) the new position after application of the map, which is defined
A Glance at the Standard Map
 A Glance at the Standard Map by Ryan Tobin Abstract The Standard (Chirikov) Map is studied and various aspects of its intricate dynamics are discussed. Also, a brief discussion of the famous KAM theory
A Glance at the Standard Map by Ryan Tobin Abstract The Standard (Chirikov) Map is studied and various aspects of its intricate dynamics are discussed. Also, a brief discussion of the famous KAM theory
Hamiltonian Dynamics
 Hamiltonian Dynamics CDS 140b Joris Vankerschaver jv@caltech.edu CDS Feb. 10, 2009 Joris Vankerschaver (CDS) Hamiltonian Dynamics Feb. 10, 2009 1 / 31 Outline 1. Introductory concepts; 2. Poisson brackets;
Hamiltonian Dynamics CDS 140b Joris Vankerschaver jv@caltech.edu CDS Feb. 10, 2009 Joris Vankerschaver (CDS) Hamiltonian Dynamics Feb. 10, 2009 1 / 31 Outline 1. Introductory concepts; 2. Poisson brackets;
Physics 106b: Lecture 7 25 January, 2018
 Physics 106b: Lecture 7 25 January, 2018 Hamiltonian Chaos: Introduction Integrable Systems We start with systems that do not exhibit chaos, but instead have simple periodic motion (like the SHO) with
Physics 106b: Lecture 7 25 January, 2018 Hamiltonian Chaos: Introduction Integrable Systems We start with systems that do not exhibit chaos, but instead have simple periodic motion (like the SHO) with
Symplectic maps. James D. Meiss. March 4, 2008
 Symplectic maps James D. Meiss March 4, 2008 First used mathematically by Hermann Weyl, the term symplectic arises from a Greek word that means twining or plaiting together. This is apt, as symplectic
Symplectic maps James D. Meiss March 4, 2008 First used mathematically by Hermann Weyl, the term symplectic arises from a Greek word that means twining or plaiting together. This is apt, as symplectic
ON THE BREAK-UP OF INVARIANT TORI WITH THREE FREQUENCIES
 ON THE BREAK-UP OF INVARIANT TORI WITH THREE FREQUENCIES J.D. MEISS Program in Applied Mathematics University of Colorado Boulder, CO Abstract We construct an approximate renormalization operator for a
ON THE BREAK-UP OF INVARIANT TORI WITH THREE FREQUENCIES J.D. MEISS Program in Applied Mathematics University of Colorado Boulder, CO Abstract We construct an approximate renormalization operator for a
Hamiltonian Chaos and the standard map
 Hamiltonian Chaos and the standard map Outline: What happens for small perturbation? Questions of long time stability? Poincare section and twist maps. Area preserving mappings. Standard map as time sections
Hamiltonian Chaos and the standard map Outline: What happens for small perturbation? Questions of long time stability? Poincare section and twist maps. Area preserving mappings. Standard map as time sections
Chaotic transport through the solar system
 The Interplanetary Superhighway Chaotic transport through the solar system Richard Taylor rtaylor@tru.ca TRU Math Seminar, April 12, 2006 p. 1 The N -Body Problem N masses interact via mutual gravitational
The Interplanetary Superhighway Chaotic transport through the solar system Richard Taylor rtaylor@tru.ca TRU Math Seminar, April 12, 2006 p. 1 The N -Body Problem N masses interact via mutual gravitational
Chaos in Hamiltonian systems
 Chaos in Hamiltonian systems Teemu Laakso April 26, 2013 Course material: Chapter 7 from Ott 1993/2002, Chaos in Dynamical Systems, Cambridge http://matriisi.ee.tut.fi/courses/mat-35006 Useful reading:
Chaos in Hamiltonian systems Teemu Laakso April 26, 2013 Course material: Chapter 7 from Ott 1993/2002, Chaos in Dynamical Systems, Cambridge http://matriisi.ee.tut.fi/courses/mat-35006 Useful reading:
Visual explorations of dynamics: The standard map
 PRAMANA c Indian Academy of Sciences Vol. 70, No. 6 journal of June 2008 physics pp. 965 988 Visual explorations of dynamics: The standard map JDMEISS Department of Applied Mathematics, University of Colorado,
PRAMANA c Indian Academy of Sciences Vol. 70, No. 6 journal of June 2008 physics pp. 965 988 Visual explorations of dynamics: The standard map JDMEISS Department of Applied Mathematics, University of Colorado,
Greene s residue criterion for the breakup of invariant tori of volume-preserving maps
 University of Colorado, Boulder CU Scholar Applied Mathematics Faculty Contributions Applied Mathematics 2013 Greene s residue criterion for the breakup of invariant tori of volume-preserving maps Adam
University of Colorado, Boulder CU Scholar Applied Mathematics Faculty Contributions Applied Mathematics 2013 Greene s residue criterion for the breakup of invariant tori of volume-preserving maps Adam
Pseudo-Chaotic Orbits of Kicked Oscillators
 Dynamical Chaos and Non-Equilibrium Statistical Mechanics: From Rigorous Results to Applications in Nano-Systems August, 006 Pseudo-Chaotic Orbits of Kicked Oscillators J. H. Lowenstein, New York University
Dynamical Chaos and Non-Equilibrium Statistical Mechanics: From Rigorous Results to Applications in Nano-Systems August, 006 Pseudo-Chaotic Orbits of Kicked Oscillators J. H. Lowenstein, New York University
Lecture 11 : Overview
 Lecture 11 : Overview Error in Assignment 3 : In Eq. 1, Hamiltonian should be H = p2 r 2m + p2 ϕ 2mr + (p z ea z ) 2 2 2m + eφ (1) Error in lecture 10, slide 7, Eq. (21). Should be S(q, α, t) m Q = β =
Lecture 11 : Overview Error in Assignment 3 : In Eq. 1, Hamiltonian should be H = p2 r 2m + p2 ϕ 2mr + (p z ea z ) 2 2 2m + eφ (1) Error in lecture 10, slide 7, Eq. (21). Should be S(q, α, t) m Q = β =
= 0. = q i., q i = E
 Summary of the Above Newton s second law: d 2 r dt 2 = Φ( r) Complicated vector arithmetic & coordinate system dependence Lagrangian Formalism: L q i d dt ( L q i ) = 0 n second-order differential equations
Summary of the Above Newton s second law: d 2 r dt 2 = Φ( r) Complicated vector arithmetic & coordinate system dependence Lagrangian Formalism: L q i d dt ( L q i ) = 0 n second-order differential equations
Quantitative global phase space analysis of APM. Stability and Instability in Mechanical Systems: Applications and Numerical Tools
 Quantitative global phase space analysis of APM Workshop on Stability and Instability in Mechanical Systems: Applications and Numerical Tools Carles Simó & Arturo Vieiro carles@maia.ub.es vieiro@maia.ub.es
Quantitative global phase space analysis of APM Workshop on Stability and Instability in Mechanical Systems: Applications and Numerical Tools Carles Simó & Arturo Vieiro carles@maia.ub.es vieiro@maia.ub.es
Lecture 8 Phase Space, Part 2. 1 Surfaces of section. MATH-GA Mechanics
 Lecture 8 Phase Space, Part 2 MATH-GA 2710.001 Mechanics 1 Surfaces of section Thus far, we have highlighted the value of phase portraits, and seen that valuable information can be extracted by looking
Lecture 8 Phase Space, Part 2 MATH-GA 2710.001 Mechanics 1 Surfaces of section Thus far, we have highlighted the value of phase portraits, and seen that valuable information can be extracted by looking
Vered Rom-Kedar a) The Department of Applied Mathematics and Computer Science, The Weizmann Institute of Science, P.O. Box 26, Rehovot 76100, Israel
 The Department of Applied Mathematics and Computer Science, The Weizmann Institute of Science, P.O. Box 26, Rehovot 76100, Israel") CHAOS VOLUME 9, NUMBER 3 SEPTEMBER 1999 REGULAR ARTICLES Islands of accelerator modes and homoclinic tangles Vered Rom-Kedar a) The Department of Applied Mathematics and Computer Science, The Weizmann
CHAOS VOLUME 9, NUMBER 3 SEPTEMBER 1999 REGULAR ARTICLES Islands of accelerator modes and homoclinic tangles Vered Rom-Kedar a) The Department of Applied Mathematics and Computer Science, The Weizmann
April 13, We now extend the structure of the horseshoe to more general kinds of invariant. x (v) λ n v.
 λ n v.") April 3, 005 - Hyperbolic Sets We now extend the structure of the horseshoe to more general kinds of invariant sets. Let r, and let f D r (M) where M is a Riemannian manifold. A compact f invariant set
April 3, 005 - Hyperbolic Sets We now extend the structure of the horseshoe to more general kinds of invariant sets. Let r, and let f D r (M) where M is a Riemannian manifold. A compact f invariant set
Discontinuous standard map dynamics
 Tom Dauer, Meg Doucette, and Shan-Conrad Wolf Summer@ICERM 2015 6 August 2015 Consider a kicked rotator Consider a kicked rotator θ = K n Z δ(t n) sin θ θ = K n Z δ(t n) sin θ p = θ is the angular momentum.
Tom Dauer, Meg Doucette, and Shan-Conrad Wolf Summer@ICERM 2015 6 August 2015 Consider a kicked rotator Consider a kicked rotator θ = K n Z δ(t n) sin θ θ = K n Z δ(t n) sin θ p = θ is the angular momentum.
Perturbation theory, KAM theory and Celestial Mechanics 7. KAM theory
 Perturbation theory, KAM theory and Celestial Mechanics 7. KAM theory Alessandra Celletti Department of Mathematics University of Roma Tor Vergata Sevilla, 25-27 January 2016 Outline 1. Introduction 2.
Perturbation theory, KAM theory and Celestial Mechanics 7. KAM theory Alessandra Celletti Department of Mathematics University of Roma Tor Vergata Sevilla, 25-27 January 2016 Outline 1. Introduction 2.
Oscillatory Motion. Simple pendulum: linear Hooke s Law restoring force for small angular deviations. small angle approximation. Oscillatory solution
 Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ small angle approximation θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic
Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ small angle approximation θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic
Oscillatory Motion. Simple pendulum: linear Hooke s Law restoring force for small angular deviations. Oscillatory solution
 Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic angular frequency
Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic angular frequency
Topological Bifurcations of Knotted Tori in Quasiperiodically Driven Oscillators
 Topological Bifurcations of Knotted Tori in Quasiperiodically Driven Oscillators Brian Spears with Andrew Szeri and Michael Hutchings University of California at Berkeley Caltech CDS Seminar October 24,
Topological Bifurcations of Knotted Tori in Quasiperiodically Driven Oscillators Brian Spears with Andrew Szeri and Michael Hutchings University of California at Berkeley Caltech CDS Seminar October 24,
ANALYTICAL MECHANICS. LOUIS N. HAND and JANET D. FINCH CAMBRIDGE UNIVERSITY PRESS
 ANALYTICAL MECHANICS LOUIS N. HAND and JANET D. FINCH CAMBRIDGE UNIVERSITY PRESS Preface xi 1 LAGRANGIAN MECHANICS l 1.1 Example and Review of Newton's Mechanics: A Block Sliding on an Inclined Plane 1
ANALYTICAL MECHANICS LOUIS N. HAND and JANET D. FINCH CAMBRIDGE UNIVERSITY PRESS Preface xi 1 LAGRANGIAN MECHANICS l 1.1 Example and Review of Newton's Mechanics: A Block Sliding on an Inclined Plane 1
Chaotic motion. Phys 420/580 Lecture 10
 Chaotic motion Phys 420/580 Lecture 10 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t
Chaotic motion Phys 420/580 Lecture 10 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t
Multiperiodic dynamics overview and some recent results
 Multiperiodic dynamics overview and some recent results Henk Broer Rijksuniversiteit Groningen Instituut voor Wiskunde en Informatica POBox 800 9700 AV Groningen email: broer@math.rug.nl URL: http://www.math.rug.nl/~broer
Multiperiodic dynamics overview and some recent results Henk Broer Rijksuniversiteit Groningen Instituut voor Wiskunde en Informatica POBox 800 9700 AV Groningen email: broer@math.rug.nl URL: http://www.math.rug.nl/~broer
Chapter 19. Circle Map Properties for K<1. The one dimensional circle map. x n+1 = x n + K 2π sin 2πx n, (19.1)
") Chapter 19 Circle Map The one dimensional circle map x n+1 = x n + K 2π sin 2πx n, (19.1) where we can collapse values of x to the range 0 x 1, is sufficiently simple that much is known rigorously [1],
Chapter 19 Circle Map The one dimensional circle map x n+1 = x n + K 2π sin 2πx n, (19.1) where we can collapse values of x to the range 0 x 1, is sufficiently simple that much is known rigorously [1],
Chapter 2 Poincaré Recurrences in Ergodic Systems Without Mixing
 Chapter Poincaré Recurrences in Ergodic Systems Without Mixing Vadim Anishchenko, Nadezhda Semenova, Elena Rybalova and Galina Strelkova. Introduction The Poincaré recurrence is one of the fundamental
Chapter Poincaré Recurrences in Ergodic Systems Without Mixing Vadim Anishchenko, Nadezhda Semenova, Elena Rybalova and Galina Strelkova. Introduction The Poincaré recurrence is one of the fundamental
Lectures on Dynamical Systems. Anatoly Neishtadt
 Lectures on Dynamical Systems Anatoly Neishtadt Lectures for Mathematics Access Grid Instruction and Collaboration (MAGIC) consortium, Loughborough University, 2007 Part 3 LECTURE 14 NORMAL FORMS Resonances
Lectures on Dynamical Systems Anatoly Neishtadt Lectures for Mathematics Access Grid Instruction and Collaboration (MAGIC) consortium, Loughborough University, 2007 Part 3 LECTURE 14 NORMAL FORMS Resonances
Problem set 7 Math 207A, Fall 2011 Solutions
 Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Introduction to Applied Nonlinear Dynamical Systems and Chaos
 Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
27. Topological classification of complex linear foliations
 27. Topological classification of complex linear foliations 545 H. Find the expression of the corresponding element [Γ ε ] H 1 (L ε, Z) through [Γ 1 ε], [Γ 2 ε], [δ ε ]. Problem 26.24. Prove that for any
27. Topological classification of complex linear foliations 545 H. Find the expression of the corresponding element [Γ ε ] H 1 (L ε, Z) through [Γ 1 ε], [Γ 2 ε], [δ ε ]. Problem 26.24. Prove that for any
arxiv: v1 [math.ds] 28 Oct 2016
![arxiv: v1 [math.ds] 28 Oct 2016](/thumbs/81/82803895.jpg "arxiv: v1 [math.ds] 28 Oct 2016") Ghosts of Order on the Frontier of Chaos arxiv:1610.09170v1 [math.ds] 28 Oct 2016 Thesis by Mark Muldoon In Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy California Institute
Ghosts of Order on the Frontier of Chaos arxiv:1610.09170v1 [math.ds] 28 Oct 2016 Thesis by Mark Muldoon In Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy California Institute
Aubry Mather Theory from a Topological Viewpoint
 Aubry Mather Theory from a Topological Viewpoint III. Applications to Hamiltonian instability Marian Gidea,2 Northeastern Illinois University, Chicago 2 Institute for Advanced Study, Princeton WORKSHOP
Aubry Mather Theory from a Topological Viewpoint III. Applications to Hamiltonian instability Marian Gidea,2 Northeastern Illinois University, Chicago 2 Institute for Advanced Study, Princeton WORKSHOP
Chaotic motion. Phys 750 Lecture 9
 Chaotic motion Phys 750 Lecture 9 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t =0to
Chaotic motion Phys 750 Lecture 9 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t =0to
AP Pd 3 Rotational Dynamics.notebook. May 08, 2014
 1 Rotational Dynamics Why do objects spin? Objects can travel in different ways: Translation all points on the body travel in parallel paths Rotation all points on the body move around a fixed point An
1 Rotational Dynamics Why do objects spin? Objects can travel in different ways: Translation all points on the body travel in parallel paths Rotation all points on the body move around a fixed point An
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
A map approximation for the restricted three-body problem
 A map approximation for the restricted three-body problem Shane Ross Engineering Science and Mechanics, Virginia Tech www.esm.vt.edu/ sdross Collaborators: P. Grover (Virginia Tech) & D. J. Scheeres (U
A map approximation for the restricted three-body problem Shane Ross Engineering Science and Mechanics, Virginia Tech www.esm.vt.edu/ sdross Collaborators: P. Grover (Virginia Tech) & D. J. Scheeres (U
Nonlinear Single-Particle Dynamics in High Energy Accelerators
 Nonlinear Single-Particle Dynamics in High Energy Accelerators Part 4: Canonical Perturbation Theory Nonlinear Single-Particle Dynamics in High Energy Accelerators There are six lectures in this course
Nonlinear Single-Particle Dynamics in High Energy Accelerators Part 4: Canonical Perturbation Theory Nonlinear Single-Particle Dynamics in High Energy Accelerators There are six lectures in this course
Nonlinear Dynamic Systems Homework 1
 Nonlinear Dynamic Systems Homework 1 1. A particle of mass m is constrained to travel along the path shown in Figure 1, which is described by the following function yx = 5x + 1x 4, 1 where x is defined
Nonlinear Dynamic Systems Homework 1 1. A particle of mass m is constrained to travel along the path shown in Figure 1, which is described by the following function yx = 5x + 1x 4, 1 where x is defined
Coexistence of Zero and Nonzero Lyapunov Exponents
 Coexistence of Zero and Nonzero Lyapunov Exponents Jianyu Chen Pennsylvania State University July 13, 2011 Outline Notions and Background Hyperbolicity Coexistence Construction of M 5 Construction of the
Coexistence of Zero and Nonzero Lyapunov Exponents Jianyu Chen Pennsylvania State University July 13, 2011 Outline Notions and Background Hyperbolicity Coexistence Construction of M 5 Construction of the
Eva Miranda. UPC-Barcelona and BGSMath. XXV International Fall Workshop on Geometry and Physics Madrid
 b-symplectic manifolds: going to infinity and coming back Eva Miranda UPC-Barcelona and BGSMath XXV International Fall Workshop on Geometry and Physics Madrid Eva Miranda (UPC) b-symplectic manifolds Semptember,
b-symplectic manifolds: going to infinity and coming back Eva Miranda UPC-Barcelona and BGSMath XXV International Fall Workshop on Geometry and Physics Madrid Eva Miranda (UPC) b-symplectic manifolds Semptember,
Stability of the phase motion in race-track microtons
 Stability of the phase motion in race-track microtons Y. A. Kubyshin (UPC), O. Larreal (U. Zulia, Venezuela), T. M-Seara (UPC), R. Ramirez-Ros (UPC) Beam Dynamics, IPAM (UCLA). 23-27 February 2017. Outline
Stability of the phase motion in race-track microtons Y. A. Kubyshin (UPC), O. Larreal (U. Zulia, Venezuela), T. M-Seara (UPC), R. Ramirez-Ros (UPC) Beam Dynamics, IPAM (UCLA). 23-27 February 2017. Outline
ROTATION NUMBERS AND INSTABILITY SETS
 BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 40, Number 3, Pages 263 279 S 0273-0979(03)00983-2 Article electronically published on April 8, 2003 ROTATION NUMBERS AND INSTABILITY SETS
BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 40, Number 3, Pages 263 279 S 0273-0979(03)00983-2 Article electronically published on April 8, 2003 ROTATION NUMBERS AND INSTABILITY SETS
On the smoothness of the conjugacy between circle maps with a break
 On the smoothness of the conjugacy between circle maps with a break Konstantin Khanin and Saša Kocić 2 Department of Mathematics, University of Toronto, Toronto, ON, Canada M5S 2E4 2 Department of Mathematics,
On the smoothness of the conjugacy between circle maps with a break Konstantin Khanin and Saša Kocić 2 Department of Mathematics, University of Toronto, Toronto, ON, Canada M5S 2E4 2 Department of Mathematics,
SOLUTIONS TO THE GINZBURG LANDAU EQUATIONS FOR PLANAR TEXTURES IN SUPERFLUID 3 He
 SOLUTIONS TO THE GINZBURG LANDAU EQUATIONS FOR PLANAR TEXTURES IN SUPERFLUID 3 He V. L. GOLO, M. I. MONASTYRSKY, AND S. P. NOVIKOV Abstract. The Ginzburg Landau equations for planar textures of superfluid
SOLUTIONS TO THE GINZBURG LANDAU EQUATIONS FOR PLANAR TEXTURES IN SUPERFLUID 3 He V. L. GOLO, M. I. MONASTYRSKY, AND S. P. NOVIKOV Abstract. The Ginzburg Landau equations for planar textures of superfluid
Hamiltonian Systems and Chaos Overview Liz Lane-Harvard, Melissa Swager
 Hamiltonian Systems and Chaos Overview Liz Lane-Harvard, Melissa Swager Abstract: In this paper we will give an overview of Hamiltonian systems with specific examples, including the classical pendulum
Hamiltonian Systems and Chaos Overview Liz Lane-Harvard, Melissa Swager Abstract: In this paper we will give an overview of Hamiltonian systems with specific examples, including the classical pendulum
INVARIANT TORI IN THE LUNAR PROBLEM. Kenneth R. Meyer, Jesús F. Palacián, and Patricia Yanguas. Dedicated to Jaume Llibre on his 60th birthday
 Publ. Mat. (2014), 353 394 Proceedings of New Trends in Dynamical Systems. Salou, 2012. DOI: 10.5565/PUBLMAT Extra14 19 INVARIANT TORI IN THE LUNAR PROBLEM Kenneth R. Meyer, Jesús F. Palacián, and Patricia
Publ. Mat. (2014), 353 394 Proceedings of New Trends in Dynamical Systems. Salou, 2012. DOI: 10.5565/PUBLMAT Extra14 19 INVARIANT TORI IN THE LUNAR PROBLEM Kenneth R. Meyer, Jesús F. Palacián, and Patricia
Internal transport barriers in some Hamiltonian systems modeling the magnetic lines dynamics in tokamak
 Journal of Physics: Conference Series Internal transport barriers in some Hamiltonian systems modeling the magnetic lines dynamics in tokamak To cite this article: D Constantinescu et al 2005 J. Phys.:
Journal of Physics: Conference Series Internal transport barriers in some Hamiltonian systems modeling the magnetic lines dynamics in tokamak To cite this article: D Constantinescu et al 2005 J. Phys.:
The Breakdown of KAM Trajectories
 The Breakdown of KAM Trajectories D. BENSIMONO ~t L. P. KADANOFF~ OAT& T Bell Laboraiories Murray Hill,New Jersey 07974 bthe James Franck Insrirure Chicago, Illinois 60637 INTRODUCl'ION Hamiltonian systems
The Breakdown of KAM Trajectories D. BENSIMONO ~t L. P. KADANOFF~ OAT& T Bell Laboraiories Murray Hill,New Jersey 07974 bthe James Franck Insrirure Chicago, Illinois 60637 INTRODUCl'ION Hamiltonian systems
MATH 614 Dynamical Systems and Chaos Lecture 15: Maps of the circle.
 MATH 614 Dynamical Systems and Chaos Lecture 15: Maps of the circle. Circle S 1. S 1 = {(x,y) R 2 : x 2 + y 2 = 1} S 1 = {z C : z = 1} T 1 = R/Z T 1 = R/2πZ α : S 1 [0,2π), angular coordinate α : S 1 R/2πZ
MATH 614 Dynamical Systems and Chaos Lecture 15: Maps of the circle. Circle S 1. S 1 = {(x,y) R 2 : x 2 + y 2 = 1} S 1 = {z C : z = 1} T 1 = R/Z T 1 = R/2πZ α : S 1 [0,2π), angular coordinate α : S 1 R/2πZ
Average Exit Time for Volume Preserving Maps
 Average Exit Time for Volume Preserving Maps J.D. Meiss Program in Applied Mathematics University of Colorado Boulder, CO 80304 April 5, 996 Abstract For a volume preserving map, the exit time, averaged
Average Exit Time for Volume Preserving Maps J.D. Meiss Program in Applied Mathematics University of Colorado Boulder, CO 80304 April 5, 996 Abstract For a volume preserving map, the exit time, averaged
Bibliography. [1] S.B. Angenent, The periodic orbits of an area preserving twist map, Comm. Math. Phys. 115 (1988), no. 3,
![Bibliography. [1] S.B. Angenent, The periodic orbits of an area preserving twist map, Comm. Math. Phys. 115 (1988), no. 3,](/thumbs/95/124358375.jpg "Bibliography. [1] S.B. Angenent, The periodic orbits of an area preserving twist map, Comm. Math. Phys. 115 (1988), no. 3,") Bibliography [1] S.B. Angenent, The periodic orbits of an area preserving twist map, Comm. Math. Phys. 115 (1988), no. 3, 353 374. [2], Monotone recurrence relations, their Birkhoff orbits and topological
Bibliography [1] S.B. Angenent, The periodic orbits of an area preserving twist map, Comm. Math. Phys. 115 (1988), no. 3, 353 374. [2], Monotone recurrence relations, their Birkhoff orbits and topological
2.10 Saddles, Nodes, Foci and Centers
 2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
PHY411 Lecture notes Part 5
 PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
Non-Twist Field Line Mappings for Tokamaks with Reversed Magnetic Shear
 Brazilian Journal of Physics, vol. 34, no. 4B, December, 2004 1759 Non-Twist Field Line Mappings for Tokamaks with Reversed Magnetic Shear M. Roberto 1, E. C. da Silva 2, I. L. Caldas 2, and R. L. Viana
Brazilian Journal of Physics, vol. 34, no. 4B, December, 2004 1759 Non-Twist Field Line Mappings for Tokamaks with Reversed Magnetic Shear M. Roberto 1, E. C. da Silva 2, I. L. Caldas 2, and R. L. Viana
AMADEU DELSHAMS AND RAFAEL RAMíREZ-ROS
 POINCARÉ-MELNIKOV-ARNOLD METHOD FOR TWIST MAPS AMADEU DELSHAMS AND RAFAEL RAMíREZ-ROS 1. Introduction A general theory for perturbations of an integrable planar map with a separatrix to a hyperbolic fixed
POINCARÉ-MELNIKOV-ARNOLD METHOD FOR TWIST MAPS AMADEU DELSHAMS AND RAFAEL RAMíREZ-ROS 1. Introduction A general theory for perturbations of an integrable planar map with a separatrix to a hyperbolic fixed
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10)
 Fake Past Exam (TT 10)") Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Linear and Nonlinear Oscillators (Lecture 2)
") Linear and Nonlinear Oscillators (Lecture 2) January 25, 2016 7/441 Lecture outline A simple model of a linear oscillator lies in the foundation of many physical phenomena in accelerator dynamics. A typical
Linear and Nonlinear Oscillators (Lecture 2) January 25, 2016 7/441 Lecture outline A simple model of a linear oscillator lies in the foundation of many physical phenomena in accelerator dynamics. A typical
Problem: A class of dynamical systems characterized by a fast divergence of the orbits. A paradigmatic example: the Arnold cat.
 À È Ê ÇÄÁ Ë ËÌ ÅË Problem: A class of dynamical systems characterized by a fast divergence of the orbits A paradigmatic example: the Arnold cat. The closure of a homoclinic orbit. The shadowing lemma.
À È Ê ÇÄÁ Ë ËÌ ÅË Problem: A class of dynamical systems characterized by a fast divergence of the orbits A paradigmatic example: the Arnold cat. The closure of a homoclinic orbit. The shadowing lemma.
MATH 614 Dynamical Systems and Chaos Lecture 11: Maps of the circle.
 MATH 614 Dynamical Systems and Chaos Lecture 11: Maps of the circle. Circle S 1. S 1 = {(x,y) R 2 : x 2 + y 2 = 1} S 1 = {z C : z = 1} T 1 = R/Z T 1 = R/2πZ α : S 1 [0,2π), angular coordinate α : S 1 R/2πZ
MATH 614 Dynamical Systems and Chaos Lecture 11: Maps of the circle. Circle S 1. S 1 = {(x,y) R 2 : x 2 + y 2 = 1} S 1 = {z C : z = 1} T 1 = R/Z T 1 = R/2πZ α : S 1 [0,2π), angular coordinate α : S 1 R/2πZ
Chapter 29. Quantum Chaos
 Chapter 29 Quantum Chaos What happens to a Hamiltonian system that for classical mechanics is chaotic when we include a nonzero h? There is no problem in principle to answering this question: given a classical
Chapter 29 Quantum Chaos What happens to a Hamiltonian system that for classical mechanics is chaotic when we include a nonzero h? There is no problem in principle to answering this question: given a classical
Robustly transitive diffeomorphisms
 Robustly transitive diffeomorphisms Todd Fisher tfisher@math.byu.edu Department of Mathematics, Brigham Young University Summer School, Chengdu, China 2009 Dynamical systems The setting for a dynamical
Robustly transitive diffeomorphisms Todd Fisher tfisher@math.byu.edu Department of Mathematics, Brigham Young University Summer School, Chengdu, China 2009 Dynamical systems The setting for a dynamical
H(p 1,...p N,q 1,...q N ) ẋ = f(x) (2) volume. dv = dt volume
 ẋ = f(x) (2) volume. dv = dt volume") Dynamique Non-Linéaire L. Tuckerman Hamiltonian Systems 1 Hamiltonian systems A Hamiltonian system is described by q i = H p i H(p 1,...p N,q 1,...q N ) ṗ i = H q i (1) where the q i are considered to
Dynamique Non-Linéaire L. Tuckerman Hamiltonian Systems 1 Hamiltonian systems A Hamiltonian system is described by q i = H p i H(p 1,...p N,q 1,...q N ) ṗ i = H q i (1) where the q i are considered to
Bifurcation of Fixed Points
 Bifurcation of Fixed Points CDS140B Lecturer: Wang Sang Koon Winter, 2005 1 Introduction ẏ = g(y, λ). where y R n, λ R p. Suppose it has a fixed point at (y 0, λ 0 ), i.e., g(y 0, λ 0 ) = 0. Two Questions:
Bifurcation of Fixed Points CDS140B Lecturer: Wang Sang Koon Winter, 2005 1 Introduction ẏ = g(y, λ). where y R n, λ R p. Suppose it has a fixed point at (y 0, λ 0 ), i.e., g(y 0, λ 0 ) = 0. Two Questions:
Chapter 23. Predicting Chaos The Shift Map and Symbolic Dynamics
 Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
11 Chaos in Continuous Dynamical Systems.
 11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
REGULAR DEPENDENCE OF THE PEIERLS BARRIERS ON PERTURBATIONS
 REGULAR DEPENDENCE OF THE PEIERLS BARRIERS ON PERTURBATIONS QINBO CHEN AND CHONG-QING CHENG Abstract. Let f be an exact area-preserving monotone twist diffeomorphism of the infinite cylinder and P ω,f
REGULAR DEPENDENCE OF THE PEIERLS BARRIERS ON PERTURBATIONS QINBO CHEN AND CHONG-QING CHENG Abstract. Let f be an exact area-preserving monotone twist diffeomorphism of the infinite cylinder and P ω,f
Author's personal copy
 Physics Letters A 366 (2007) 437 441 www.elsevier.com/locate/pla Abstract On a new fixed point of the renormalization group operator for area-preserving maps K. Fuchss a,a.wurm b, P.J. Morrison a, a Department
Physics Letters A 366 (2007) 437 441 www.elsevier.com/locate/pla Abstract On a new fixed point of the renormalization group operator for area-preserving maps K. Fuchss a,a.wurm b, P.J. Morrison a, a Department
AVERAGING AND RECONSTRUCTION IN HAMILTONIAN SYSTEMS
 AVERAGING AND RECONSTRUCTION IN HAMILTONIAN SYSTEMS Kenneth R. Meyer 1 Jesús F. Palacián 2 Patricia Yanguas 2 1 Department of Mathematical Sciences University of Cincinnati, Cincinnati, Ohio (USA) 2 Departamento
AVERAGING AND RECONSTRUCTION IN HAMILTONIAN SYSTEMS Kenneth R. Meyer 1 Jesús F. Palacián 2 Patricia Yanguas 2 1 Department of Mathematical Sciences University of Cincinnati, Cincinnati, Ohio (USA) 2 Departamento
Hamiltonian Lecture notes Part 3
 Hamiltonian Lecture notes Part 3 Alice Quillen March 1, 017 Contents 1 What is a resonance? 1 1.1 Dangers of low order approximations...................... 1. A resonance is a commensurability.......................
Hamiltonian Lecture notes Part 3 Alice Quillen March 1, 017 Contents 1 What is a resonance? 1 1.1 Dangers of low order approximations...................... 1. A resonance is a commensurability.......................
On Periodic points of area preserving torus homeomorphisms
 On Periodic points of area preserving torus homeomorphisms Fábio Armando Tal and Salvador Addas-Zanata Instituto de Matemática e Estatística Universidade de São Paulo Rua do Matão 11, Cidade Universitária,
On Periodic points of area preserving torus homeomorphisms Fábio Armando Tal and Salvador Addas-Zanata Instituto de Matemática e Estatística Universidade de São Paulo Rua do Matão 11, Cidade Universitária,
THE LONGITUDINAL KAM-COCYCLE OF A MAGNETIC FLOW
 THE LONGITUDINAL KAM-COCYCLE OF A MAGNETIC FLOW GABRIEL P. PATERNAIN Abstract. Let M be a closed oriented surface of negative Gaussian curvature and let Ω be a non-exact 2-form. Let λ be a small positive
THE LONGITUDINAL KAM-COCYCLE OF A MAGNETIC FLOW GABRIEL P. PATERNAIN Abstract. Let M be a closed oriented surface of negative Gaussian curvature and let Ω be a non-exact 2-form. Let λ be a small positive
MATHER THEORY, WEAK KAM, AND VISCOSITY SOLUTIONS OF HAMILTON-JACOBI PDE S
 MATHER THEORY, WEAK KAM, AND VISCOSITY SOLUTIONS OF HAMILTON-JACOBI PDE S VADIM YU. KALOSHIN 1. Motivation Consider a C 2 smooth Hamiltonian H : T n R n R, where T n is the standard n-dimensional torus
MATHER THEORY, WEAK KAM, AND VISCOSITY SOLUTIONS OF HAMILTON-JACOBI PDE S VADIM YU. KALOSHIN 1. Motivation Consider a C 2 smooth Hamiltonian H : T n R n R, where T n is the standard n-dimensional torus
HAMILTONIAN ELLIPTIC DYNAMICS ON SYMPLECTIC 4-MANIFOLDS
 HAMILTONIAN ELLIPTIC DYNAMICS ON SYMPLECTIC 4-MANIFOLDS MÁRIO BESSA AND JOÃO LOPES DIAS Abstract. We consider C 2 Hamiltonian functions on compact 4-dimensional symplectic manifolds to study elliptic dynamics
HAMILTONIAN ELLIPTIC DYNAMICS ON SYMPLECTIC 4-MANIFOLDS MÁRIO BESSA AND JOÃO LOPES DIAS Abstract. We consider C 2 Hamiltonian functions on compact 4-dimensional symplectic manifolds to study elliptic dynamics
SHADOWING ORBITS FOR TRANSITION CHAINS OF INVARIANT TORI ALTERNATING WITH BIRKHOFF ZONES OF INSTABILITY
 SHADOWING ORBITS FOR TRANSITION CHAINS OF INVARIANT TORI ALTERNATING WITH BIRKHOFF ZONES OF INSTABILITY MARIAN GIDEA AND CLARK ROBINSON Abstract. We consider a dynamical system that exhibits transition
SHADOWING ORBITS FOR TRANSITION CHAINS OF INVARIANT TORI ALTERNATING WITH BIRKHOFF ZONES OF INSTABILITY MARIAN GIDEA AND CLARK ROBINSON Abstract. We consider a dynamical system that exhibits transition
HAMILTONIAN STABILITY OF SPIN ORBIT RESONANCES IN CELESTIAL MECHANICS. 1. Introduction
 HAMILTONIAN STABILITY OF SPIN ORBIT RESONANCES IN CELESTIAL MECHANICS ALESSANDRA CELLETTI 1 and LUIGI CHIERCHIA 2 1 Dipartimento di Matematica, Università di Roma Tor Vergata, Via della Ricerca Scientifica,
HAMILTONIAN STABILITY OF SPIN ORBIT RESONANCES IN CELESTIAL MECHANICS ALESSANDRA CELLETTI 1 and LUIGI CHIERCHIA 2 1 Dipartimento di Matematica, Università di Roma Tor Vergata, Via della Ricerca Scientifica,
SPLITTING OF SEPARATRICES FOR (FAST) QUASIPERIODIC FORCING. splitting, which now seems to be the main cause of the stochastic behavior in
 QUASIPERIODIC FORCING. splitting, which now seems to be the main cause of the stochastic behavior in") SPLITTING OF SEPARATRICES FOR (FAST) QUASIPERIODIC FORCING A. DELSHAMS, V. GELFREICH, A. JORBA AND T.M. SEARA At the end of the last century, H. Poincare [7] discovered the phenomenon of separatrices splitting,
SPLITTING OF SEPARATRICES FOR (FAST) QUASIPERIODIC FORCING A. DELSHAMS, V. GELFREICH, A. JORBA AND T.M. SEARA At the end of the last century, H. Poincare [7] discovered the phenomenon of separatrices splitting,
Universal Dynamics in a Neighborhood of a Generic Elliptic Periodic Point
 ISSN 1560-3547, Regular and Chaotic Dynamics, 2010, Vol. 15, Nos. 2 3, pp. 159 164. c Pleiades Publishing, Ltd., 2010. L.P. SHILNIKOV 75 Special Issue Universal Dynamics in a Neighborhood of a Generic
ISSN 1560-3547, Regular and Chaotic Dynamics, 2010, Vol. 15, Nos. 2 3, pp. 159 164. c Pleiades Publishing, Ltd., 2010. L.P. SHILNIKOV 75 Special Issue Universal Dynamics in a Neighborhood of a Generic
Siegel disk for complexified Hénon map
 Siegel disk for complexified Hénon map O.B. Isaeva, S.P. Kuznetsov arxiv:0804.4238v1 [nlin.cd] 26 Apr 2008 Institute of Radio-Engineering and Electronics of RAS, Saratov Branch, Zelenaya 38, Saratov, 410019,
Siegel disk for complexified Hénon map O.B. Isaeva, S.P. Kuznetsov arxiv:0804.4238v1 [nlin.cd] 26 Apr 2008 Institute of Radio-Engineering and Electronics of RAS, Saratov Branch, Zelenaya 38, Saratov, 410019,
Nonlinear Dynamics. Moreno Marzolla Dip. di Informatica Scienza e Ingegneria (DISI) Università di Bologna.
 Università di Bologna.") Nonlinear Dynamics Moreno Marzolla Dip. di Informatica Scienza e Ingegneria (DISI) Università di Bologna http://www.moreno.marzolla.name/ 2 Introduction: Dynamics of Simple Maps 3 Dynamical systems A dynamical
Nonlinear Dynamics Moreno Marzolla Dip. di Informatica Scienza e Ingegneria (DISI) Università di Bologna http://www.moreno.marzolla.name/ 2 Introduction: Dynamics of Simple Maps 3 Dynamical systems A dynamical
Meanders and Reconnection-Collision Sequences in the Standard Nontwist Map
 Meanders and Reconnection-Collision Sequences in the Standard Nontwist Map A. Wurm, A. Apte, K. Fuchss, and P.J. Morrison Department of Physics and Institute for Fusion Studies The University of Texas
Meanders and Reconnection-Collision Sequences in the Standard Nontwist Map A. Wurm, A. Apte, K. Fuchss, and P.J. Morrison Department of Physics and Institute for Fusion Studies The University of Texas
KAM Theory: quasi-periodicity in dynamical systems
 KAM Theory: quasi-periodicity in dynamical systems Henk W. Broer Department of Mathematics and Computing Science, University of Groningen, Blauwborgje 3, 9747 AC Groningen, The Netherlands E-mail: broer@math.rug.nl
KAM Theory: quasi-periodicity in dynamical systems Henk W. Broer Department of Mathematics and Computing Science, University of Groningen, Blauwborgje 3, 9747 AC Groningen, The Netherlands E-mail: broer@math.rug.nl
TWIST MAPS OF THE ANNULUS
 1 TWIST MAPS OF THE ANNULUS 4. Monotone Twist Maps A. Definitions The annulus can be defined as A = S 1 [a, b], where the circle S 1 =IR/ Z. We define the cylinder by: C = S 1 IR. As with maps of the circle,
1 TWIST MAPS OF THE ANNULUS 4. Monotone Twist Maps A. Definitions The annulus can be defined as A = S 1 [a, b], where the circle S 1 =IR/ Z. We define the cylinder by: C = S 1 IR. As with maps of the circle,
Symplectic maps, variational principles, and transport
 Symplectic maps, variational principles, and transport J. D. Meiss Program in Applied Mathematics, University of Colorado, Boulder, Colorado 80309 Symplectic maps are the discrete-time analog of Hamiltonian
Symplectic maps, variational principles, and transport J. D. Meiss Program in Applied Mathematics, University of Colorado, Boulder, Colorado 80309 Symplectic maps are the discrete-time analog of Hamiltonian
Stickiness in Chaos. G.Contopoulos and M. Harsoula Research Center for Astronomy Academy of Athens, Soranou Efesiou 4, Athens
 Stickiness in Chaos G.Contopoulos and M. Harsoula Research Center for Astronomy Academy of Athens, Soranou Efesiou 4, 11527 Athens Abstract We distinguish two types of stickiness in systems of two degrees
Stickiness in Chaos G.Contopoulos and M. Harsoula Research Center for Astronomy Academy of Athens, Soranou Efesiou 4, 11527 Athens Abstract We distinguish two types of stickiness in systems of two degrees
Axioms for the Real Number System
 Axioms for the Real Number System Math 361 Fall 2003 Page 1 of 9 The Real Number System The real number system consists of four parts: 1. A set (R). We will call the elements of this set real numbers,
Axioms for the Real Number System Math 361 Fall 2003 Page 1 of 9 The Real Number System The real number system consists of four parts: 1. A set (R). We will call the elements of this set real numbers,
Maps. A map is a dynamical system with discrete time. Such dynamical systems are defined by iterating a transformation φ of points x.
 Encyclopedia of Nonlinear Science, Alwyn Scott, Editor, (Routledge, New York, 5) pp. 548-553. Maps Pierre Gaspard Center for Nonlinear Phenomena and Comple Systems, Université Libre de Bruelles, Code Postal
Encyclopedia of Nonlinear Science, Alwyn Scott, Editor, (Routledge, New York, 5) pp. 548-553. Maps Pierre Gaspard Center for Nonlinear Phenomena and Comple Systems, Université Libre de Bruelles, Code Postal
DYNAMICAL SYSTEMS PROBLEMS. asgor/ (1) Which of the following maps are topologically transitive (minimal,
 Which of the following maps are topologically transitive (minimal,") DYNAMICAL SYSTEMS PROBLEMS http://www.math.uci.edu/ asgor/ (1) Which of the following maps are topologically transitive (minimal, topologically mixing)? identity map on a circle; irrational rotation of
DYNAMICAL SYSTEMS PROBLEMS http://www.math.uci.edu/ asgor/ (1) Which of the following maps are topologically transitive (minimal, topologically mixing)? identity map on a circle; irrational rotation of
The Structure of Hyperbolic Sets
 The Structure of Hyperbolic Sets p. 1/35 The Structure of Hyperbolic Sets Todd Fisher tfisher@math.umd.edu Department of Mathematics University of Maryland, College Park The Structure of Hyperbolic Sets
The Structure of Hyperbolic Sets p. 1/35 The Structure of Hyperbolic Sets Todd Fisher tfisher@math.umd.edu Department of Mathematics University of Maryland, College Park The Structure of Hyperbolic Sets
A Model of Evolutionary Dynamics with Quasiperiodic Forcing
 paper presented at Society for Experimental Mechanics (SEM) IMAC XXXIII Conference on Structural Dynamics February 2-5, 205, Orlando FL A Model of Evolutionary Dynamics with Quasiperiodic Forcing Elizabeth
paper presented at Society for Experimental Mechanics (SEM) IMAC XXXIII Conference on Structural Dynamics February 2-5, 205, Orlando FL A Model of Evolutionary Dynamics with Quasiperiodic Forcing Elizabeth
MATH 614 Dynamical Systems and Chaos Lecture 16: Rotation number. The standard family.
 MATH 614 Dynamical Systems and Chaos Lecture 16: Rotation number. The standard family. Maps of the circle T : S 1 S 1, T an orientation-preserving homeomorphism. Suppose T : S 1 S 1 is an orientation-preserving
MATH 614 Dynamical Systems and Chaos Lecture 16: Rotation number. The standard family. Maps of the circle T : S 1 S 1, T an orientation-preserving homeomorphism. Suppose T : S 1 S 1 is an orientation-preserving
PHYS2330 Intermediate Mechanics Fall Final Exam Tuesday, 21 Dec 2010
 Name: PHYS2330 Intermediate Mechanics Fall 2010 Final Exam Tuesday, 21 Dec 2010 This exam has two parts. Part I has 20 multiple choice questions, worth two points each. Part II consists of six relatively
Name: PHYS2330 Intermediate Mechanics Fall 2010 Final Exam Tuesday, 21 Dec 2010 This exam has two parts. Part I has 20 multiple choice questions, worth two points each. Part II consists of six relatively
MATH 271 Summer 2016 Practice problem solutions Week 1
 Part I MATH 271 Summer 2016 Practice problem solutions Week 1 For each of the following statements, determine whether the statement is true or false. Prove the true statements. For the false statement,
Part I MATH 271 Summer 2016 Practice problem solutions Week 1 For each of the following statements, determine whether the statement is true or false. Prove the true statements. For the false statement,
Average exit time for volume-preserving maps
 Average exit time for volume-preserving maps J. D. Meiss Program in Applied Mathematics, University of Colorado, Boulder, Colorado 80304 Received 15 April 1996; accepted for publication 24 June 1996 For
Average exit time for volume-preserving maps J. D. Meiss Program in Applied Mathematics, University of Colorado, Boulder, Colorado 80304 Received 15 April 1996; accepted for publication 24 June 1996 For
1. < 0: the eigenvalues are real and have opposite signs; the fixed point is a saddle point
 Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
A Numerical Integration Scheme For The Dynamic Motion Of Rigid Bodies Using The Euler Parameters
 International Journal of Research in Engineering and Science (IJRES) ISSN (Online): 30-9364, ISSN (Print): 30-9356 Volume Issue 8 ǁ August 014 ǁ PP30-37 A Numerical Integration Scheme For The Dynamic Motion
International Journal of Research in Engineering and Science (IJRES) ISSN (Online): 30-9364, ISSN (Print): 30-9356 Volume Issue 8 ǁ August 014 ǁ PP30-37 A Numerical Integration Scheme For The Dynamic Motion
THE THREE-BODY PROBLEM
 STUDIES IN ASTRONAUTICS 4 THE THREE-BODY PROBLEM CHRISTIAN MARCH AL Office National d'etudes et de RecherchesAerospatiales, Chätillon, France Amsterdam - Oxford - New York -Tokyo 1990 X CONTENTS Foreword
STUDIES IN ASTRONAUTICS 4 THE THREE-BODY PROBLEM CHRISTIAN MARCH AL Office National d'etudes et de RecherchesAerospatiales, Chätillon, France Amsterdam - Oxford - New York -Tokyo 1990 X CONTENTS Foreword
Quasipatterns in surface wave experiments
 Quasipatterns in surface wave experiments Alastair Rucklidge Department of Applied Mathematics University of Leeds, Leeds LS2 9JT, UK With support from EPSRC A.M. Rucklidge and W.J. Rucklidge, Convergence
Quasipatterns in surface wave experiments Alastair Rucklidge Department of Applied Mathematics University of Leeds, Leeds LS2 9JT, UK With support from EPSRC A.M. Rucklidge and W.J. Rucklidge, Convergence
Motion in Space. MATH 311, Calculus III. J. Robert Buchanan. Fall Department of Mathematics. J. Robert Buchanan Motion in Space
 Motion in Space MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Background Suppose the position vector of a moving object is given by r(t) = f (t), g(t), h(t), Background
Motion in Space MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Background Suppose the position vector of a moving object is given by r(t) = f (t), g(t), h(t), Background