Matlab software tools for model identification and data analysis 11/12/2015 Prof. Marcello Farina
|
|
|
- Jack Morton
- 5 years ago
- Views:
Transcription
1 Matlab software tools for model identification and data analysis 11/12/2015 Prof. Marcello Farina Model Identification and Data Analysis (Academic year ) Prof. Sergio Bittanti
2 Outline Data generation and analysis Definition and generation of time series and dynamic systems Analysis of systems Analysis of time series (sampled covariance and spectral analysis) Optimal predictors Identification Parameter identification Structure selection Model validation Exercizes
3 Time series and systems White noise >> N=100; % number of samples >> lambda=1; % standard deviation >> mu=1; % expected value I method >> u=mu+lambda*randn(n,1); II method >> u=wgn(m,n,p); % zero-mean signal M: number of signals P: signal power (dbw) (10log10(lambda^2)) Sum of a WGN and a generic signal >> u=awgn(x,snr,sigpower); X: original signal SRN: signal-to-noise ratio (db) SIGPOWER: power of signal X (dbw) (10log10( (0))) - if SIGPOWER= measured, AWGN estimates the power of signal X.
4 Time series and systems Definition of dynamic linear discrete-time systems: external representation (transfer function LTI format) >> system = tf(num,den,ts) num: numerator den: denominator Ts: sampling time (-1 default) >> system=tf([1 1],[1-0.8],1) Transfer function: z z - 0.8
5 Time series and systems Step response of a LTI system >> T=[0:Ts:Tfinal]; >> [y,t]=step(system,tfinal); % step response >> step(system,tfinal) % plot Response of a LTI system to a general input signal >> T=[0:Ts:Tfinal]; >> u1=sin(0.1*t); % e.g., sinusoidal input >> u2=1+randn(t,1); % e.g., white gaussian noise >> [y,t]=lsim(system,u1+u2,t);
6 Time series and systems The SYSTEM IDENTIFICATION TOOLBOX uses different formats for models (detto IDPOLY format) and signals (detto IDDATA format) Definition of IDDATA objects: >> yu_id=iddata(y,u,ts); u: input data y: output data Ts: sampling time
7 Time series and systems Definition of IDPOLY objects: >> model_idpoly = idpoly(a,b,c,d,f,noisevariance,ts) A,B,C,D,F are vectors (i.e., containing coefficients of the polynomials in incresing order of the exponent of z -1 ) Model_idpoly: A(q) y(t) = [B(q)/F(q)] u(t-nk) + [C(q)/D(q)] e(t) (If ARMAX: F=[], D=[]) The delay nk is defined in polynomial B(q). >> conversion from LTI format: Model_idpoly = idpoly(model_lti) model_lti is a LTI model (defined, e.g., using tf, zpk, ss) Response of an IDPOLY system to a generic input signal (vector u) >> y=sim(model_idpoly,u); -> It does not simulate the noise component
8 Time series and systems Analysis of systems (both for LTI and IDPOLY formats): Zeros and poles: >> [Z,P,K]=zpkdata(model) Z = [-1] % positions of the zeros P = [0.8000] % positions of the poles K = 1 transfer constant Bode diagrams: >> [A,phi] = bode(model,w) W: values of the angular frequency w where to compute A(w) and phi(w) A: amplitude (A(w)) Phi: phase (phi(w))
9 Time series and systems Bode diagrams: >> [A,phi] = bode(model,[0.1 1]) A(:,:,1) = A(:,:,2) = phi(:,:,1) = phi(:,:,2) = >> bode(model) >> % draws the Bode plots (amplitude db- and phase)
10 Time series and systems Analysis of time series - m=mean(x) % Average or mean value. Y=detrend(X, constant ) % Remove constant trend from data sets. Y=detrend(X, linear ) % Remove linear trend from data sets. Covariance function ϒ( ) >> gamma=covf(y,10) % tau=0,1,,10-1 >> plot([0:9],gamma) Spectrum (!) periodogram method >> periodogram(y); % plots the periodogram >> [Pxx,w]=periodogram(y); >> plot(w/pi,10*log10(pxx)) Other methods are also available (e.g., fast fourier trasnform, see «help spectrum») Warning: covf computed the correlation function! TO OBTAIN THE COVARIANCE FUNCTION THE SIGNAL MUST HAVE ZERO MEAN Warning: no regularization technique is applied: the estimator is not consistent!
11 Predictors Given the system y t = B z A z u t τ + C z A z e t, e~wn(0, σ2 ) The optimal k-steps predictor is given by y t t k = B(z)E k z C z = B(z)E k z C z u t τ + R k z C z u t τ + R k z C z y t y t k where E k (z) e R k (z) are the result and the remainder, respectively, of the long division, and R k z =R k z z k
12 Predictors e(t) C z A z u(t) z τ B z A z + + y(t) R k z C z z k + y(t t k) + B(z)E k z C z
13 Predictors - MATLAB function >> [Yp,X0e,PREDICTOR] = predict(model,yu_id,k) % optimal k-steps predictor. inputs model: IDPOLY format yu_id: IDDATA object k: # of prediction steps outputs Yp: IDDATA format XOe: Initial states PREDICTOR: IDPOLY format PREDICTOR{1}: Discrete-time IDPOLY model with two inputs: - u(t) - y(t) Outputs: A(q) = B1(q) = -> C(q) -> R(q) y t t k = B(z)E k z C z u t k + R k z C z y t B2(q) = -> E(q)B(q)q^-k
14 Predictors - EXAMPLE: >> model1=idpoly([1 0.3],[ ],[1 0.5],[],[],1,1) Discrete-time IDPOLY model: A(q)y(t) = B(q)u(t) + C(q)e(t) A(q) = q^-1 B(q) = q^-1 C(q) = q^-1 k = 2 >> [yd,xoe,modpred]=predict(model1,dati,2); >> modpred{1} Discrete-time IDPOLY model: A(q)y(t) = B(q)u(t) + e(t) A(q) = q^-1 B1(q) = q^-2 B2(q) = q^-2 ( q^ q^-2 )
15 Prediction error Predictors >> Epsilon = pe(model_idpoly,yu_iddata) % k-steps prediction error ARDERSON TEST FOR THE PREDICTION ERROR (99% confidence reguion) >> e=resid(model,data) inputs model: IDPOLY format data: IDDATA format (input-output data) outputs e: IDDATA ([errore di predizione,input]) If the outputs are not specified, a plot is shown: - Empirical correlation function (empirical - sampled) of the prediction error - 99% confidence region -> if more than 99% of the samples of the normalized correlation function lie in the confidence region: positive results of the whiteness Test!
![Predictors Example: >> model_idpoly=idpoly([1 0.5],[0 1 0.3],[1 0.6],[],[],1,1) Discrete-time IDPOLY model: A(q)y(t) = B(q)u(t) + C(q)e(t) A(q) = 1 + 0.](/docs-images/91/107652487/images/16-0.jpg "5 q^-1 B(q) = q^-1 + 0.3 q^-2 C(q) = 1 + 0.6 q^-1 This model was not estimated from data.")
16 Predictors Example: >> model_idpoly=idpoly([1 0.5],[ ],[1 0.6],[],[],1,1) Discrete-time IDPOLY model: A(q)y(t) = B(q)u(t) + C(q)e(t) A(q) = q^-1 B(q) = q^ q^-2 C(q) = q^-1 This model was not estimated from data. Sampling interval: 1 >> data=randn(100,2); >> resid(model_idpoly,data)
17 Identification >> ident % start the MATLAB identification toolbox GUI

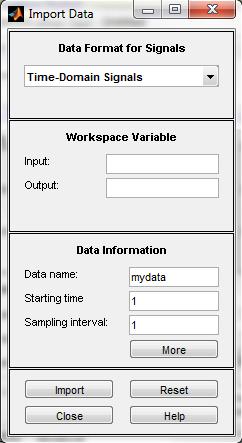
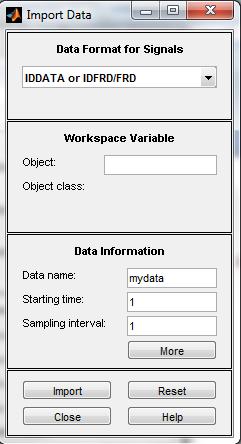
18 1.IMPORT DATA Identification

19 Identification 2.PREPROCESS DATA NEW (DETRENDED) DATA

20 3.ESTIMATE MODEL SELECT MODEL STRUCTURE Identification
21 Identification 3.1. MODEL STRUCTURES ARX(na,nb,k): A(z)y(t) = B(z)u(t) + e(t), where A(z)=1+ a_1 z^ a_na z^-na B(z)=b_1 z^-k b_nb z^-(k+nb) y(t)=-a_1 y(t-1)-...-a_na y(t-na) + b_1 u(t-k)+...+b_nb u(t-n_b-k)+e(t) ARMAX(na,nb,k): A(z)y(t) = B(z)u(t) + C(z)e(t), where A(z)=1+ a_1 z^ a_na z^-na B(z)=b_1 z^-k b_nb z^-(k+nb) C(z)=1+ c_1 z^ c_nc z^-nc y(t)=-a_1 y(t-1)-...-a_na y(t-na) + b_1 u(t-k)+...+b_nb u(t-n_b-k) +e(t)+c_1 e(t-1) c_nc e(t-nc)
22 Identification 3.1. MODEL STRUCTURES OE(nb,nf,k): y(t) = B(z)/F(z)u(t) + e(t), where B(z)=b_1 z^-k b_nb z^-(k+nb) F(z)=1+ f_1 z^ f_nf z^-nf y(t)=-f_1 y(t-1)-...-f_na y(t-nf) + b_1 u(t-k)+...+b_nb u(t-n_b-k) +e(t)+f_1 e(t-1) f_nf e(t-nf) BOX-JENKINS(nb,nc,nd,nf,k): y(t) = B(z)/F(z)u(t) + C(z)/D(z)e(t) STATE-SPACE (n: order) [PEM or subspace identification] x(t+1)=ax(t)+bu(t)+ke(t) y(t)=cx(t)+du(t)+e(t)
23 Identification 3.2. EXTERNAL REPRESENTATION MODEL STRUCTURES BOX-JENKINS WHY ARE THESE CLASSES OF INTEREST? OUTPUT ERROR (OE) ARX ARMAX
24 Identification ARX(na,nb,k): y(t)=-a_1 y(t-1)-...-a_na y(t-na) + b_1 u(t-k)+...+b_nb u(t-n_b-k)+e(t) OPTIMAL PREDICTOR: yp(t-1)=-a_1 y(t-1)-...-a_na y(t-na) + b_1 u(t-k)+...+b_nb u(t-n_b-k) least square method (COMPUTATIONALLY LIGHTWEIGHT). IF THE SYSTEM DOES NOT BELONG TO THIS MODEL STRUCTURE: BAD RESULTS ( WRONG POLES AND ZEROS)! OE(nb,nf,k): y(t) = B(z)/F(z)u(t) + e(t) OPTIMAL PREDICTOR: yp(t) = B(z)/F(z)u(t) The OPTIMAL PREDICTOR is the SIMULATOR (i.e., it does not need data). The simulation with OE is said Simulation Error Minimization. Computationally intensive It is able to well capture the dominant dynamics (poles and zeros) even if the model structure is not correct!

25 Identification 3.ESTIMATE MODEL IDENTIFICATION OF THE (CONTINUOUS-TIME) TRANSFER FUNCTION
26 Identification 3.ESTIMATE MODEL IDENTIFICATION OF MODELS: -NONLINEAR ARX - HAMMERSTEIN WIENER

27 4.Compare and validate models Identification
28 Identification For further details, see
29 Identification Other related Matlab functions (2 Identification toolbox) Parametric model estimation ar - AR-models of signals using various approaches. armax - Prediction error estimate of an ARMAX model. arx - LS-estimate of ARX-models. bj - Prediction error estimate of a Box-Jenkins model. ivar - IV-estimates for the AR-part of a scalar time series (with instrumental variable method). iv4 - Approximately optimal IV-estimates for ARX-models. n4sid - State-space model estimation using a sub-space method. nlarx - Prediction error estimate of a nonlinear ARX model. nlhw - Prediction error estimate of a Hammerstein-Wiener model. oe - Prediction error estimate of an output-error model. pem - Prediction error estimate of a general model.
30 Identification Model structure selection aic - Compute Akaike's information criterion. fpe - Compute final prediction error criterion. arxstruc - Loss functions for families of ARX-models. selstruc - Select model structures according to various criteria. idss/setstruc - Set the structure matrices for idss objects. struc - Generate typical structure matrices for ARXSTRUC. For more details please see: >> help ident
31 Exercizes Linear systems 1. Consider the discrete-time linear system, characterized by the following transfer function W z = 1+z z Plot the step response of the system. What are its features, in the light of the properties (stability, gain, etc.) of the systems? 1.2 Plot the response of the system to two different sinusoidal inputs, i.e., u(t)=sin(0.1t) and u(t)=sin(t). Analyze the properties of the two output signals in the light of the frequency response theorem.
32 Exercizes White noise 1. Define a 1000-samples realization of a Gaussian white noise with zero mean and unity variance λ 2 = 1. Verify that 68% of samples has absolute value smaller than λ and that 95% has absolute value smaller than 2λ. 2. Repeat the previous exercize in case λ 2 = Define a 1000-samples realization of a Gaussian white noise with mean μ = 10 and variance λ 2 = 4. Compare the obtained realization with that obtained at Exercize 2. Estimate the covariance function from the available data and verify that it corresponds with that expected in case of white noise.
33 Exercizes Identification of time series Consider the MA(1) stochastic process y(t), generated from the dynamic system y t = e t + 0.5e(t 1) with input e(t), i.e., white Gaussian noise with mean μ = 0 and variance λ 2 = 1. Define a realization of y(t) consisting of N=1000 samples. 1. Assume that the data generation system is unknown and the model class, selected for identification purposes, consists of a AR(1) process, i.e., y t = θy t 1 + ξ(t) where ξ(t) is a zero mean white noise process. 1.1 Compute, using the recursive least square method, the optimal estimate θ N of θ.
34 Exercizes 1.2 Define the evolution of the prediction error ε(t) = y t y(t t 1). Estimate its mean and variance Assuming that the data generation system is known, compute analytically the value of θ that minimizes the cost function J θ J θ. = E[ε(t) 2 ], and the corresponding value of
35 Exercizes Model Identification Consider the ARMAX system y(t)=0.1 y(t-1)+2u(t-1)-0.8 u(t-2)+e(t)+0.3e(t-1) Where e(t) is a white noise with zero mean and unitary variance. 1. Generate a 1000-samples realization of the output signal y(t), when the input u(t) is a persistently exciting signal (e.g., a white noise), and where y(0)=0;. 2. Identify, using the identification toolbox: 1. an ARX(1,1,1) model 2. an ARX(1,2,1) model 3. an ARMAX(1,2,2,1) model 4. an ARMAX(1,1,2,1) model 5. an OE(2,1,1) model 3. Compare and analyze the results (possibly add validation data to validate the results).
36 Exercizes Stationary stochastic processes 1. Consider the stochastic process y(t), generated from the dynamic system with a white noise e(t) as input. W z = 1+z z Assume that e(t) is a white Gaussian noise with mean μ and variance λ 2. Setting μ = 0 and λ 2 = 1, generate different realizations of both e(t) and y(t). Estimate, from the available data, mean and variance of the processes e(t) and y(t). 1.2 Show the results to the questions below in case μ = 10 and λ 2 = 1. What is the relationship between the mean of y(t) and the gain of the dynamic system W(z)?
37 Exercizes 2. Consider the stochastic process y(t), generated from the dynamic system with a white noise e(t) as input. W z = 1 z z Assume that e(t) is a white Gaussian noise with mean μ and variance λ 2. Setting μ = 0 and λ 2 = 1, generate different realizations of both e(t) and y(t). Estimate, from the available data, mean and variance of the processes e(t) and y(t). 2.2 Show the results to the questions below in case μ = 10 and λ 2 = Plot the spectra of the processes y(t) and y(t), i.e., Φ y ω = W(e jω ) 2 and Φ y ω = W(e jω ) 2. Is it possible to establish a relationship between the realizations of y(t) and y(t), are their respective spectra Φ y ω and Φ y ω?
38 Exercizes Predictors 1. Consider the stochastic process y(t), generated from the dynamic system W z = z z 1 with input e(t), i.e., white Gaussian noise with mean μ = 0 and variance λ 2 = Define the optimal 1-step predictor of y(t). 1.2 Define a realization of y(t) and the relative 1-step prediction y(t t 1). Compare the signals y(t) and y(t t 1), by drawing them in the same plot. 1.3 Define the signal ε(t) = y t y(t t 1) and plot it. Estimate mean and variance of ε(t). Compute analytically the theoretical values of the latter quantities and compare them with those obtaned from data.
39 Exercizes 1.4 Define now the trivial non optimal predictor y T t t 1 = E y t = 0. Estimate mean and variance of the estimation error in this case. 1.5 Compare the performances of the predictors defined above. 1.6 Define the optimal 2-step predictor y(t t 2) of y(t). 1.7 Define a realization of y(t) and the relative 1-step and 2-step predictions y(t t 1) and y(t t 2), respectively. Compare the signals y(t) and y(t t 1), and y(t t 2), by drawing them in the same plot. 1.8 Define the signal ε 2 (t) = y t y(t t 2) and plot it. Estimate mean and variance of ε 2 (t). Compute analytically the theoretical values of the latter quantities and compare them with those obtaned from data.
Matlab software tools for model identification and data analysis 10/11/2017 Prof. Marcello Farina
 Matlab software tools for model identification and data analysis 10/11/2017 Prof. Marcello Farina Model Identification and Data Analysis (Academic year 2017-2018) Prof. Sergio Bittanti Outline Data generation
Matlab software tools for model identification and data analysis 10/11/2017 Prof. Marcello Farina Model Identification and Data Analysis (Academic year 2017-2018) Prof. Sergio Bittanti Outline Data generation
Computer Exercise 1 Estimation and Model Validation
 Lund University Time Series Analysis Mathematical Statistics Fall 2018 Centre for Mathematical Sciences Computer Exercise 1 Estimation and Model Validation This computer exercise treats identification,
Lund University Time Series Analysis Mathematical Statistics Fall 2018 Centre for Mathematical Sciences Computer Exercise 1 Estimation and Model Validation This computer exercise treats identification,
EL1820 Modeling of Dynamical Systems
 EL1820 Modeling of Dynamical Systems Lecture 9 - Parameter estimation in linear models Model structures Parameter estimation via prediction error minimization Properties of the estimate: bias and variance
EL1820 Modeling of Dynamical Systems Lecture 9 - Parameter estimation in linear models Model structures Parameter estimation via prediction error minimization Properties of the estimate: bias and variance
A Mathematica Toolbox for Signals, Models and Identification
 The International Federation of Automatic Control A Mathematica Toolbox for Signals, Models and Identification Håkan Hjalmarsson Jonas Sjöberg ACCESS Linnaeus Center, Electrical Engineering, KTH Royal
The International Federation of Automatic Control A Mathematica Toolbox for Signals, Models and Identification Håkan Hjalmarsson Jonas Sjöberg ACCESS Linnaeus Center, Electrical Engineering, KTH Royal
Lecture 7: Discrete-time Models. Modeling of Physical Systems. Preprocessing Experimental Data.
 ISS0031 Modeling and Identification Lecture 7: Discrete-time Models. Modeling of Physical Systems. Preprocessing Experimental Data. Aleksei Tepljakov, Ph.D. October 21, 2015 Discrete-time Transfer Functions
ISS0031 Modeling and Identification Lecture 7: Discrete-time Models. Modeling of Physical Systems. Preprocessing Experimental Data. Aleksei Tepljakov, Ph.D. October 21, 2015 Discrete-time Transfer Functions
CONTROL SYSTEMS, ROBOTICS, AND AUTOMATION - Vol. V - Prediction Error Methods - Torsten Söderström
 PREDICTIO ERROR METHODS Torsten Söderström Department of Systems and Control, Information Technology, Uppsala University, Uppsala, Sweden Keywords: prediction error method, optimal prediction, identifiability,
PREDICTIO ERROR METHODS Torsten Söderström Department of Systems and Control, Information Technology, Uppsala University, Uppsala, Sweden Keywords: prediction error method, optimal prediction, identifiability,
12. Prediction Error Methods (PEM)
") 12. Prediction Error Methods (PEM) EE531 (Semester II, 2010) description optimal prediction Kalman filter statistical results computational aspects 12-1 Description idea: determine the model parameter
12. Prediction Error Methods (PEM) EE531 (Semester II, 2010) description optimal prediction Kalman filter statistical results computational aspects 12-1 Description idea: determine the model parameter
On Input Design for System Identification
 On Input Design for System Identification Input Design Using Markov Chains CHIARA BRIGHENTI Masters Degree Project Stockholm, Sweden March 2009 XR-EE-RT 2009:002 Abstract When system identification methods
On Input Design for System Identification Input Design Using Markov Chains CHIARA BRIGHENTI Masters Degree Project Stockholm, Sweden March 2009 XR-EE-RT 2009:002 Abstract When system identification methods
EL1820 Modeling of Dynamical Systems
 EL1820 Modeling of Dynamical Systems Lecture 10 - System identification as a model building tool Experiment design Examination and prefiltering of data Model structure selection Model validation Lecture
EL1820 Modeling of Dynamical Systems Lecture 10 - System identification as a model building tool Experiment design Examination and prefiltering of data Model structure selection Model validation Lecture
EECE Adaptive Control
 EECE 574 - Adaptive Control Recursive Identification Algorithms Guy Dumont Department of Electrical and Computer Engineering University of British Columbia January 2012 Guy Dumont (UBC EECE) EECE 574 -
EECE 574 - Adaptive Control Recursive Identification Algorithms Guy Dumont Department of Electrical and Computer Engineering University of British Columbia January 2012 Guy Dumont (UBC EECE) EECE 574 -
Identification of a best thermal formula and model for oil and winding 0f power transformers using prediction methods
 Identification of a best thermal formula and model for and 0f power transformers using prediction methods Kourosh Mousavi Takami Jafar Mahmoudi Mälardalen University, Västerås, sweden Kourosh.mousavi.takami@mdh.se
Identification of a best thermal formula and model for and 0f power transformers using prediction methods Kourosh Mousavi Takami Jafar Mahmoudi Mälardalen University, Västerås, sweden Kourosh.mousavi.takami@mdh.se
EECE Adaptive Control
 EECE 574 - Adaptive Control Recursive Identification in Closed-Loop and Adaptive Control Guy Dumont Department of Electrical and Computer Engineering University of British Columbia January 2010 Guy Dumont
EECE 574 - Adaptive Control Recursive Identification in Closed-Loop and Adaptive Control Guy Dumont Department of Electrical and Computer Engineering University of British Columbia January 2010 Guy Dumont
Introduction to system identification
 Introduction to system identification Jan Swevers July 2006 0-0 Introduction to system identification 1 Contents of this lecture What is system identification Time vs. frequency domain identification Discrete
Introduction to system identification Jan Swevers July 2006 0-0 Introduction to system identification 1 Contents of this lecture What is system identification Time vs. frequency domain identification Discrete
Control Systems Lab - SC4070 System Identification and Linearization
 Control Systems Lab - SC4070 System Identification and Linearization Dr. Manuel Mazo Jr. Delft Center for Systems and Control (TU Delft) m.mazo@tudelft.nl Tel.:015-2788131 TU Delft, February 13, 2015 (slides
Control Systems Lab - SC4070 System Identification and Linearization Dr. Manuel Mazo Jr. Delft Center for Systems and Control (TU Delft) m.mazo@tudelft.nl Tel.:015-2788131 TU Delft, February 13, 2015 (slides
Model Identification and Validation for a Heating System using MATLAB System Identification Toolbox
 IOP Conference Series: Materials Science and Engineering OPEN ACCESS Model Identification and Validation for a Heating System using MATLAB System Identification Toolbox To cite this article: Muhammad Junaid
IOP Conference Series: Materials Science and Engineering OPEN ACCESS Model Identification and Validation for a Heating System using MATLAB System Identification Toolbox To cite this article: Muhammad Junaid
Identification of ARX, OE, FIR models with the least squares method
 Identification of ARX, OE, FIR models with the least squares method CHEM-E7145 Advanced Process Control Methods Lecture 2 Contents Identification of ARX model with the least squares minimizing the equation
Identification of ARX, OE, FIR models with the least squares method CHEM-E7145 Advanced Process Control Methods Lecture 2 Contents Identification of ARX model with the least squares minimizing the equation
Data-Driven Modelling of Natural Gas Dehydrators for Dew Point Determination
 International Journal of Oil, Gas and Coal Engineering 2017; 5(3): 27-33 http://www.sciencepublishinggroup.com/j/ogce doi: 10.11648/j.ogce.20170503.11 ISSN: 2376-7669(Print); ISSN: 2376-7677(Online) Data-Driven
International Journal of Oil, Gas and Coal Engineering 2017; 5(3): 27-33 http://www.sciencepublishinggroup.com/j/ogce doi: 10.11648/j.ogce.20170503.11 ISSN: 2376-7669(Print); ISSN: 2376-7677(Online) Data-Driven
Identification of Linear Systems
 Identification of Linear Systems Johan Schoukens http://homepages.vub.ac.be/~jschouk Vrije Universiteit Brussel Department INDI /67 Basic goal Built a parametric model for a linear dynamic system from
Identification of Linear Systems Johan Schoukens http://homepages.vub.ac.be/~jschouk Vrije Universiteit Brussel Department INDI /67 Basic goal Built a parametric model for a linear dynamic system from
Outline 2(42) Sysid Course VT An Overview. Data from Gripen 4(42) An Introductory Example 2,530 3(42)
 Sysid Course VT An Overview. Data from Gripen 4(42) An Introductory Example 2,530 3(42)") Outline 2(42) Sysid Course T1 2016 An Overview. Automatic Control, SY, Linköpings Universitet An Umbrella Contribution for the aterial in the Course The classic, conventional System dentification Setup
Outline 2(42) Sysid Course T1 2016 An Overview. Automatic Control, SY, Linköpings Universitet An Umbrella Contribution for the aterial in the Course The classic, conventional System dentification Setup
Lecture 1: Introduction to System Modeling and Control. Introduction Basic Definitions Different Model Types System Identification
 Lecture 1: Introduction to System Modeling and Control Introduction Basic Definitions Different Model Types System Identification What is Mathematical Model? A set of mathematical equations (e.g., differential
Lecture 1: Introduction to System Modeling and Control Introduction Basic Definitions Different Model Types System Identification What is Mathematical Model? A set of mathematical equations (e.g., differential
6.435, System Identification
 SET 6 System Identification 6.435 Parametrized model structures One-step predictor Identifiability Munther A. Dahleh 1 Models of LTI Systems A complete model u = input y = output e = noise (with PDF).
SET 6 System Identification 6.435 Parametrized model structures One-step predictor Identifiability Munther A. Dahleh 1 Models of LTI Systems A complete model u = input y = output e = noise (with PDF).
EECE Adaptive Control
 EECE 574 - Adaptive Control Basics of System Identification Guy Dumont Department of Electrical and Computer Engineering University of British Columbia January 2010 Guy Dumont (UBC) EECE574 - Basics of
EECE 574 - Adaptive Control Basics of System Identification Guy Dumont Department of Electrical and Computer Engineering University of British Columbia January 2010 Guy Dumont (UBC) EECE574 - Basics of
THERE are two types of configurations [1] in the
![THERE are two types of configurations [1] in the](/thumbs/89/97962248.jpg "THERE are two types of configurations [1] in the") Linear Identification of a Steam Generation Plant Magdi S. Mahmoud Member, IAEG Abstract The paper examines the development of models of steam generation plant using linear identification techniques. The
Linear Identification of a Steam Generation Plant Magdi S. Mahmoud Member, IAEG Abstract The paper examines the development of models of steam generation plant using linear identification techniques. The
f-domain expression for the limit model Combine: 5.12 Approximate Modelling What can be said about H(q, θ) G(q, θ ) H(q, θ ) with
 G(q, θ ) H(q, θ ) with") 5.2 Approximate Modelling What can be said about if S / M, and even G / G? G(q, ) H(q, ) f-domain expression for the limit model Combine: with ε(t, ) =H(q, ) [y(t) G(q, )u(t)] y(t) =G (q)u(t) v(t) We know
5.2 Approximate Modelling What can be said about if S / M, and even G / G? G(q, ) H(q, ) f-domain expression for the limit model Combine: with ε(t, ) =H(q, ) [y(t) G(q, )u(t)] y(t) =G (q)u(t) v(t) We know
Practical Spectral Estimation
 Digital Signal Processing/F.G. Meyer Lecture 4 Copyright 2015 François G. Meyer. All Rights Reserved. Practical Spectral Estimation 1 Introduction The goal of spectral estimation is to estimate how the
Digital Signal Processing/F.G. Meyer Lecture 4 Copyright 2015 François G. Meyer. All Rights Reserved. Practical Spectral Estimation 1 Introduction The goal of spectral estimation is to estimate how the
ECE 636: Systems identification
 ECE 636: Systems identification Lectures 7 8 onparametric identification (continued) Important distributions: chi square, t distribution, F distribution Sampling distributions ib i Sample mean If the variance
ECE 636: Systems identification Lectures 7 8 onparametric identification (continued) Important distributions: chi square, t distribution, F distribution Sampling distributions ib i Sample mean If the variance
6.435, System Identification
 System Identification 6.435 SET 3 Nonparametric Identification Munther A. Dahleh 1 Nonparametric Methods for System ID Time domain methods Impulse response Step response Correlation analysis / time Frequency
System Identification 6.435 SET 3 Nonparametric Identification Munther A. Dahleh 1 Nonparametric Methods for System ID Time domain methods Impulse response Step response Correlation analysis / time Frequency
A summary of Modeling and Simulation
 A summary of Modeling and Simulation Text-book: Modeling of dynamic systems Lennart Ljung and Torkel Glad Content What re Models for systems and signals? Basic concepts Types of models How to build a model
A summary of Modeling and Simulation Text-book: Modeling of dynamic systems Lennart Ljung and Torkel Glad Content What re Models for systems and signals? Basic concepts Types of models How to build a model
Centre for Mathematical Sciences HT 2017 Mathematical Statistics
 Lund University Stationary stochastic processes Centre for Mathematical Sciences HT 2017 Mathematical Statistics Computer exercise 3 in Stationary stochastic processes, HT 17. The purpose of this exercise
Lund University Stationary stochastic processes Centre for Mathematical Sciences HT 2017 Mathematical Statistics Computer exercise 3 in Stationary stochastic processes, HT 17. The purpose of this exercise
Advanced Process Control Tutorial Problem Set 2 Development of Control Relevant Models through System Identification
 Advanced Process Control Tutorial Problem Set 2 Development of Control Relevant Models through System Identification 1. Consider the time series x(k) = β 1 + β 2 k + w(k) where β 1 and β 2 are known constants
Advanced Process Control Tutorial Problem Set 2 Development of Control Relevant Models through System Identification 1. Consider the time series x(k) = β 1 + β 2 k + w(k) where β 1 and β 2 are known constants
6. Methods for Rational Spectra It is assumed that signals have rational spectra m k= m
 6. Methods for Rational Spectra It is assumed that signals have rational spectra m k= m φ(ω) = γ ke jωk n k= n ρ, (23) jωk ke where γ k = γ k and ρ k = ρ k. Any continuous PSD can be approximated arbitrary
6. Methods for Rational Spectra It is assumed that signals have rational spectra m k= m φ(ω) = γ ke jωk n k= n ρ, (23) jωk ke where γ k = γ k and ρ k = ρ k. Any continuous PSD can be approximated arbitrary
Rozwiązanie zagadnienia odwrotnego wyznaczania sił obciąŝających konstrukcje w czasie eksploatacji
 Rozwiązanie zagadnienia odwrotnego wyznaczania sił obciąŝających konstrukcje w czasie eksploatacji Tadeusz Uhl Piotr Czop Krzysztof Mendrok Faculty of Mechanical Engineering and Robotics Department of
Rozwiązanie zagadnienia odwrotnego wyznaczania sił obciąŝających konstrukcje w czasie eksploatacji Tadeusz Uhl Piotr Czop Krzysztof Mendrok Faculty of Mechanical Engineering and Robotics Department of
Chap 4. State-Space Solutions and
 Chap 4. State-Space Solutions and Realizations Outlines 1. Introduction 2. Solution of LTI State Equation 3. Equivalent State Equations 4. Realizations 5. Solution of Linear Time-Varying (LTV) Equations
Chap 4. State-Space Solutions and Realizations Outlines 1. Introduction 2. Solution of LTI State Equation 3. Equivalent State Equations 4. Realizations 5. Solution of Linear Time-Varying (LTV) Equations
Outline. What Can Regularization Offer for Estimation of Dynamical Systems? State-of-the-Art System Identification
 Outline What Can Regularization Offer for Estimation of Dynamical Systems? with Tianshi Chen Preamble: The classic, conventional System Identification Setup Bias Variance, Model Size Selection Regularization
Outline What Can Regularization Offer for Estimation of Dynamical Systems? with Tianshi Chen Preamble: The classic, conventional System Identification Setup Bias Variance, Model Size Selection Regularization
LTI Approximations of Slightly Nonlinear Systems: Some Intriguing Examples
 LTI Approximations of Slightly Nonlinear Systems: Some Intriguing Examples Martin Enqvist, Lennart Ljung Division of Automatic Control Department of Electrical Engineering Linköpings universitet, SE-581
LTI Approximations of Slightly Nonlinear Systems: Some Intriguing Examples Martin Enqvist, Lennart Ljung Division of Automatic Control Department of Electrical Engineering Linköpings universitet, SE-581
On Moving Average Parameter Estimation
 On Moving Average Parameter Estimation Niclas Sandgren and Petre Stoica Contact information: niclas.sandgren@it.uu.se, tel: +46 8 473392 Abstract Estimation of the autoregressive moving average (ARMA)
On Moving Average Parameter Estimation Niclas Sandgren and Petre Stoica Contact information: niclas.sandgren@it.uu.se, tel: +46 8 473392 Abstract Estimation of the autoregressive moving average (ARMA)
Transfer function for the seismic signal recorded in solid and fractured rock surrounding deep level mining excavations
 Transfer function for the seismic signal recorded in solid and fractured rock surrounding deep level mining excavations by A. Cichowicz*, A.M. Milev, and R.J. Durrheim Synopsis The obective of this work
Transfer function for the seismic signal recorded in solid and fractured rock surrounding deep level mining excavations by A. Cichowicz*, A.M. Milev, and R.J. Durrheim Synopsis The obective of this work
Tutorial lecture 2: System identification
 Tutorial lecture 2: System identification Data driven modeling: Find a good model from noisy data. Model class: Set of all a priori feasible candidate systems Identification procedure: Attach a system
Tutorial lecture 2: System identification Data driven modeling: Find a good model from noisy data. Model class: Set of all a priori feasible candidate systems Identification procedure: Attach a system
Multivariate ARMA Processes
 LECTURE 8 Multivariate ARMA Processes A vector y(t) of n elements is said to follow an n-variate ARMA process of orders p and q if it satisfies the equation (1) A 0 y(t) + A 1 y(t 1) + + A p y(t p) = M
LECTURE 8 Multivariate ARMA Processes A vector y(t) of n elements is said to follow an n-variate ARMA process of orders p and q if it satisfies the equation (1) A 0 y(t) + A 1 y(t 1) + + A p y(t p) = M
IDENTIFICATION OF ARMA MODELS
 IDENTIFICATION OF ARMA MODELS A stationary stochastic process can be characterised, equivalently, by its autocovariance function or its partial autocovariance function. It can also be characterised by
IDENTIFICATION OF ARMA MODELS A stationary stochastic process can be characterised, equivalently, by its autocovariance function or its partial autocovariance function. It can also be characterised by
Some solutions of the written exam of January 27th, 2014
 TEORIA DEI SISTEMI Systems Theory) Prof. C. Manes, Prof. A. Germani Some solutions of the written exam of January 7th, 0 Problem. Consider a feedback control system with unit feedback gain, with the following
TEORIA DEI SISTEMI Systems Theory) Prof. C. Manes, Prof. A. Germani Some solutions of the written exam of January 7th, 0 Problem. Consider a feedback control system with unit feedback gain, with the following
Lecture 6: Deterministic Self-Tuning Regulators
 Lecture 6: Deterministic Self-Tuning Regulators Feedback Control Design for Nominal Plant Model via Pole Placement Indirect Self-Tuning Regulators Direct Self-Tuning Regulators c Anton Shiriaev. May, 2007.
Lecture 6: Deterministic Self-Tuning Regulators Feedback Control Design for Nominal Plant Model via Pole Placement Indirect Self-Tuning Regulators Direct Self-Tuning Regulators c Anton Shiriaev. May, 2007.
Piezoelectric Transducer Modeling: with System Identification (SI) Method
 Method") World Academy of Science, Engineering and Technology 5 8 Piezoelectric Transducer Modeling: with System Identification (SI) Method Nora Taghavi, and Ali Sadr Abstract System identification is the process
World Academy of Science, Engineering and Technology 5 8 Piezoelectric Transducer Modeling: with System Identification (SI) Method Nora Taghavi, and Ali Sadr Abstract System identification is the process
PERFORMANCE ANALYSIS OF CLOSED LOOP SYSTEM WITH A TAILOR MADE PARAMETERIZATION. Jianhong Wang, Hong Jiang and Yonghong Zhu
 International Journal of Innovative Computing, Information and Control ICIC International c 208 ISSN 349-498 Volume 4, Number, February 208 pp. 8 96 PERFORMANCE ANALYSIS OF CLOSED LOOP SYSTEM WITH A TAILOR
International Journal of Innovative Computing, Information and Control ICIC International c 208 ISSN 349-498 Volume 4, Number, February 208 pp. 8 96 PERFORMANCE ANALYSIS OF CLOSED LOOP SYSTEM WITH A TAILOR
Frequency methods for the analysis of feedback systems. Lecture 6. Loop analysis of feedback systems. Nyquist approach to study stability
 Lecture 6. Loop analysis of feedback systems 1. Motivation 2. Graphical representation of frequency response: Bode and Nyquist curves 3. Nyquist stability theorem 4. Stability margins Frequency methods
Lecture 6. Loop analysis of feedback systems 1. Motivation 2. Graphical representation of frequency response: Bode and Nyquist curves 3. Nyquist stability theorem 4. Stability margins Frequency methods
Closed Loop Identification (L26)
") Stochastic Adaptive Control (02421) www.imm.dtu.dk/courses/02421 Niels Kjølstad Poulsen Build. 303B, room 016 Section for Dynamical Systems Dept. of Applied Mathematics and Computer Science The Technical
Stochastic Adaptive Control (02421) www.imm.dtu.dk/courses/02421 Niels Kjølstad Poulsen Build. 303B, room 016 Section for Dynamical Systems Dept. of Applied Mathematics and Computer Science The Technical
What can regularization offer for estimation of dynamical systems?
 8 6 4 6 What can regularization offer for estimation of dynamical systems? Lennart Ljung Tianshi Chen Division of Automatic Control, Department of Electrical Engineering, Linköping University, SE-58 83
8 6 4 6 What can regularization offer for estimation of dynamical systems? Lennart Ljung Tianshi Chen Division of Automatic Control, Department of Electrical Engineering, Linköping University, SE-58 83
Final Exam January 31, Solutions
 Final Exam January 31, 014 Signals & Systems (151-0575-01) Prof. R. D Andrea & P. Reist Solutions Exam Duration: Number of Problems: Total Points: Permitted aids: Important: 150 minutes 7 problems 50 points
Final Exam January 31, 014 Signals & Systems (151-0575-01) Prof. R. D Andrea & P. Reist Solutions Exam Duration: Number of Problems: Total Points: Permitted aids: Important: 150 minutes 7 problems 50 points
Piezoelectric Transducer Modeling: with System Identification (SI) Method
 Method") Vol:, No:, 8 Piezoelectric Transducer Modeling: with System Identification (SI) Method Nora Taghavi, and Ali Sadr International Science Index, Electrical and Computer Engineering Vol:, No:, 8 waset.org/publication/688
Vol:, No:, 8 Piezoelectric Transducer Modeling: with System Identification (SI) Method Nora Taghavi, and Ali Sadr International Science Index, Electrical and Computer Engineering Vol:, No:, 8 waset.org/publication/688
Modeling and Identification of Dynamic Systems (vimmd312, 2018)
") Modeling and Identification of Dynamic Systems (vimmd312, 2018) Textbook background of the curriculum taken. In parenthesis: material not reviewed due to time shortage, but which is suggested to be read
Modeling and Identification of Dynamic Systems (vimmd312, 2018) Textbook background of the curriculum taken. In parenthesis: material not reviewed due to time shortage, but which is suggested to be read
IDENTIFICATION OF A TWO-INPUT SYSTEM: VARIANCE ANALYSIS
 IDENTIFICATION OF A TWO-INPUT SYSTEM: VARIANCE ANALYSIS M Gevers,1 L Mišković,2 D Bonvin A Karimi Center for Systems Engineering and Applied Mechanics (CESAME) Université Catholique de Louvain B-1348 Louvain-la-Neuve,
IDENTIFICATION OF A TWO-INPUT SYSTEM: VARIANCE ANALYSIS M Gevers,1 L Mišković,2 D Bonvin A Karimi Center for Systems Engineering and Applied Mechanics (CESAME) Université Catholique de Louvain B-1348 Louvain-la-Neuve,
Chapter 6 - Solved Problems
 Chapter 6 - Solved Problems Solved Problem 6.. Contributed by - James Welsh, University of Newcastle, Australia. Find suitable values for the PID parameters using the Z-N tuning strategy for the nominal
Chapter 6 - Solved Problems Solved Problem 6.. Contributed by - James Welsh, University of Newcastle, Australia. Find suitable values for the PID parameters using the Z-N tuning strategy for the nominal
Model structure. Lecture Note #3 (Chap.6) Identification of time series model. ARMAX Models and Difference Equations
 Identification of time series model. ARMAX Models and Difference Equations") System Modeling and Identification Lecture ote #3 (Chap.6) CHBE 70 Korea University Prof. Dae Ryoo Yang Model structure ime series Multivariable time series x [ ] x x xm Multidimensional time series (temporal+spatial)
System Modeling and Identification Lecture ote #3 (Chap.6) CHBE 70 Korea University Prof. Dae Ryoo Yang Model structure ime series Multivariable time series x [ ] x x xm Multidimensional time series (temporal+spatial)
Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam!
 To be returned at the end of the exam!") Prüfung Regelungstechnik I (Control Systems I) Prof. Dr. Lino Guzzella 3.. 24 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam! Do not mark up this translation aid -
Prüfung Regelungstechnik I (Control Systems I) Prof. Dr. Lino Guzzella 3.. 24 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam! Do not mark up this translation aid -
Identification, Model Validation and Control. Lennart Ljung, Linköping
 Identification, Model Validation and Control Lennart Ljung, Linköping Acknowledgment: Useful discussions with U Forssell and H Hjalmarsson 1 Outline 1. Introduction 2. System Identification (in closed
Identification, Model Validation and Control Lennart Ljung, Linköping Acknowledgment: Useful discussions with U Forssell and H Hjalmarsson 1 Outline 1. Introduction 2. System Identification (in closed
Chapter 6: Nonparametric Time- and Frequency-Domain Methods. Problems presented by Uwe
 System Identification written by L. Ljung, Prentice Hall PTR, 1999 Chapter 6: Nonparametric Time- and Frequency-Domain Methods Problems presented by Uwe System Identification Problems Chapter 6 p. 1/33
System Identification written by L. Ljung, Prentice Hall PTR, 1999 Chapter 6: Nonparametric Time- and Frequency-Domain Methods Problems presented by Uwe System Identification Problems Chapter 6 p. 1/33
Control Systems I. Lecture 6: Poles and Zeros. Readings: Emilio Frazzoli. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 6: Poles and Zeros Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 27, 2017 E. Frazzoli (ETH) Lecture 6: Control Systems I 27/10/2017
Control Systems I Lecture 6: Poles and Zeros Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 27, 2017 E. Frazzoli (ETH) Lecture 6: Control Systems I 27/10/2017
Time Series Examples Sheet
 Lent Term 2001 Richard Weber Time Series Examples Sheet This is the examples sheet for the M. Phil. course in Time Series. A copy can be found at: http://www.statslab.cam.ac.uk/~rrw1/timeseries/ Throughout,
Lent Term 2001 Richard Weber Time Series Examples Sheet This is the examples sheet for the M. Phil. course in Time Series. A copy can be found at: http://www.statslab.cam.ac.uk/~rrw1/timeseries/ Throughout,
Continuous Order Identification of PHWR Models Under Step-back for the Design of Hyper-damped Power Tracking Controller with Enhanced Reactor Safety
 Continuous Order Identification of PHWR Models Under Step-back for the Design of Hyper-damped Power Tracking Controller with Enhanced Reactor Safety Saptarshi Das a,b, Sumit Mukherjee b,c, Shantanu Das
Continuous Order Identification of PHWR Models Under Step-back for the Design of Hyper-damped Power Tracking Controller with Enhanced Reactor Safety Saptarshi Das a,b, Sumit Mukherjee b,c, Shantanu Das
High-resolution Parametric Subspace Methods
 High-resolution Parametric Subspace Methods The first parametric subspace-based method was the Pisarenko method,, which was further modified, leading to the MUltiple SIgnal Classification (MUSIC) method.
High-resolution Parametric Subspace Methods The first parametric subspace-based method was the Pisarenko method,, which was further modified, leading to the MUltiple SIgnal Classification (MUSIC) method.
MODEL PREDICTIVE CONTROL and optimization
 MODEL PREDICTIVE CONTROL and optimization Lecture notes Model Predictive Control PhD., Associate professor David Di Ruscio System and Control Engineering Department of Technology Telemark University College
MODEL PREDICTIVE CONTROL and optimization Lecture notes Model Predictive Control PhD., Associate professor David Di Ruscio System and Control Engineering Department of Technology Telemark University College
Data-driven methods in application to flood defence systems monitoring and analysis Pyayt, A.
 UvA-DARE (Digital Academic Repository) Data-driven methods in application to flood defence systems monitoring and analysis Pyayt, A. Link to publication Citation for published version (APA): Pyayt, A.
UvA-DARE (Digital Academic Repository) Data-driven methods in application to flood defence systems monitoring and analysis Pyayt, A. Link to publication Citation for published version (APA): Pyayt, A.
Parametric Output Error Based Identification and Fault Detection in Structures Under Earthquake Excitation
 Parametric Output Error Based Identification and Fault Detection in Structures Under Earthquake Excitation J.S. Sakellariou and S.D. Fassois Department of Mechanical & Aeronautical Engr. GR 265 Patras,
Parametric Output Error Based Identification and Fault Detection in Structures Under Earthquake Excitation J.S. Sakellariou and S.D. Fassois Department of Mechanical & Aeronautical Engr. GR 265 Patras,
SGN Advanced Signal Processing: Lecture 8 Parameter estimation for AR and MA models. Model order selection
 SG 21006 Advanced Signal Processing: Lecture 8 Parameter estimation for AR and MA models. Model order selection Ioan Tabus Department of Signal Processing Tampere University of Technology Finland 1 / 28
SG 21006 Advanced Signal Processing: Lecture 8 Parameter estimation for AR and MA models. Model order selection Ioan Tabus Department of Signal Processing Tampere University of Technology Finland 1 / 28
Topics in Undergraduate Control Systems Design
 Topics in Undergraduate Control Systems Design João P. Hespanha April 9, 2006 Disclaimer: This is an early draft and probably contains many typos. Comments and information about typos are welcome. Please
Topics in Undergraduate Control Systems Design João P. Hespanha April 9, 2006 Disclaimer: This is an early draft and probably contains many typos. Comments and information about typos are welcome. Please
Lecture Note #7 (Chap.11)
") System Modeling and Identification Lecture Note #7 (Chap.) CBE 702 Korea University Prof. Dae Ryoo Yang Chap. Real-time Identification Real-time identification Supervision and tracing of time varying parameters
System Modeling and Identification Lecture Note #7 (Chap.) CBE 702 Korea University Prof. Dae Ryoo Yang Chap. Real-time Identification Real-time identification Supervision and tracing of time varying parameters
Forecasting of ATM cash demand
 Forecasting of ATM cash demand Ayush Maheshwari Mathematics and scientific computing Department of Mathematics and Statistics Indian Institute of Technology (IIT), Kanpur ayushiitk@gmail.com Project guide:
Forecasting of ATM cash demand Ayush Maheshwari Mathematics and scientific computing Department of Mathematics and Statistics Indian Institute of Technology (IIT), Kanpur ayushiitk@gmail.com Project guide:
Problem Set 2: Box-Jenkins methodology
 Problem Set : Box-Jenkins methodology 1) For an AR1) process we have: γ0) = σ ε 1 φ σ ε γ0) = 1 φ Hence, For a MA1) process, p lim R = φ γ0) = 1 + θ )σ ε σ ε 1 = γ0) 1 + θ Therefore, p lim R = 1 1 1 +
Problem Set : Box-Jenkins methodology 1) For an AR1) process we have: γ0) = σ ε 1 φ σ ε γ0) = 1 φ Hence, For a MA1) process, p lim R = φ γ0) = 1 + θ )σ ε σ ε 1 = γ0) 1 + θ Therefore, p lim R = 1 1 1 +
Empirical Market Microstructure Analysis (EMMA)
") Empirical Market Microstructure Analysis (EMMA) Lecture 3: Statistical Building Blocks and Econometric Basics Prof. Dr. Michael Stein michael.stein@vwl.uni-freiburg.de Albert-Ludwigs-University of Freiburg
Empirical Market Microstructure Analysis (EMMA) Lecture 3: Statistical Building Blocks and Econometric Basics Prof. Dr. Michael Stein michael.stein@vwl.uni-freiburg.de Albert-Ludwigs-University of Freiburg
Modeling of Surface EMG Signals using System Identification Techniques
 Modeling of Surface EMG Signals using System Identification Techniques Vishnu R S PG Scholar, Dept. of Electrical and Electronics Engg. Mar Baselios College of Engineering and Technology Thiruvananthapuram,
Modeling of Surface EMG Signals using System Identification Techniques Vishnu R S PG Scholar, Dept. of Electrical and Electronics Engg. Mar Baselios College of Engineering and Technology Thiruvananthapuram,
Improving performance and stability of MRI methods in closed-loop
 Preprints of the 8th IFAC Symposium on Advanced Control of Chemical Processes The International Federation of Automatic Control Improving performance and stability of MRI methods in closed-loop Alain Segundo
Preprints of the 8th IFAC Symposium on Advanced Control of Chemical Processes The International Federation of Automatic Control Improving performance and stability of MRI methods in closed-loop Alain Segundo
Sound Listener s perception
 Inversion of Loudspeaker Dynamics by Polynomial LQ Feedforward Control Mikael Sternad, Mathias Johansson and Jonas Rutstrom Abstract- Loudspeakers always introduce linear and nonlinear distortions in a
Inversion of Loudspeaker Dynamics by Polynomial LQ Feedforward Control Mikael Sternad, Mathias Johansson and Jonas Rutstrom Abstract- Loudspeakers always introduce linear and nonlinear distortions in a
Sign-Perturbed Sums (SPS): A Method for Constructing Exact Finite-Sample Confidence Regions for General Linear Systems
: A Method for Constructing Exact Finite-Sample Confidence Regions for General Linear Systems") 51st IEEE Conference on Decision and Control December 10-13, 2012. Maui, Hawaii, USA Sign-Perturbed Sums (SPS): A Method for Constructing Exact Finite-Sample Confidence Regions for General Linear Systems
51st IEEE Conference on Decision and Control December 10-13, 2012. Maui, Hawaii, USA Sign-Perturbed Sums (SPS): A Method for Constructing Exact Finite-Sample Confidence Regions for General Linear Systems
Recursive, Infinite Impulse Response (IIR) Digital Filters:
 Digital Filters:") Recursive, Infinite Impulse Response (IIR) Digital Filters: Filters defined by Laplace Domain transfer functions (analog devices) can be easily converted to Z domain transfer functions (digital, sampled
Recursive, Infinite Impulse Response (IIR) Digital Filters: Filters defined by Laplace Domain transfer functions (analog devices) can be easily converted to Z domain transfer functions (digital, sampled
The Laplace Transform
 The Laplace Transform Generalizing the Fourier Transform The CTFT expresses a time-domain signal as a linear combination of complex sinusoids of the form e jωt. In the generalization of the CTFT to the
The Laplace Transform Generalizing the Fourier Transform The CTFT expresses a time-domain signal as a linear combination of complex sinusoids of the form e jωt. In the generalization of the CTFT to the
Refined Instrumental Variable Methods for Identifying Hammerstein Models Operating in Closed Loop
 Refined Instrumental Variable Methods for Identifying Hammerstein Models Operating in Closed Loop V. Laurain, M. Gilson, H. Garnier Abstract This article presents an instrumental variable method dedicated
Refined Instrumental Variable Methods for Identifying Hammerstein Models Operating in Closed Loop V. Laurain, M. Gilson, H. Garnier Abstract This article presents an instrumental variable method dedicated
Optimal Polynomial Control for Discrete-Time Systems
 1 Optimal Polynomial Control for Discrete-Time Systems Prof Guy Beale Electrical and Computer Engineering Department George Mason University Fairfax, Virginia Correspondence concerning this paper should
1 Optimal Polynomial Control for Discrete-Time Systems Prof Guy Beale Electrical and Computer Engineering Department George Mason University Fairfax, Virginia Correspondence concerning this paper should
CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME
 CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME Shri Mata Vaishno Devi University, (SMVDU), 2013 Page 13 CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME When characterizing or modeling a random variable, estimates
CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME Shri Mata Vaishno Devi University, (SMVDU), 2013 Page 13 CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME When characterizing or modeling a random variable, estimates
Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators
 Shock and Vibration, Article ID 71814, 5 pages http://dx.doi.org/1.1155/214/71814 Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators Sajad
Shock and Vibration, Article ID 71814, 5 pages http://dx.doi.org/1.1155/214/71814 Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators Sajad
Computer Exercise 0 Simulation of ARMA-processes
 Lund University Time Series Analysis Mathematical Statistics Fall 2018 Centre for Mathematical Sciences Computer Exercise 0 Simulation of ARMA-processes The purpose of this computer exercise is to illustrate
Lund University Time Series Analysis Mathematical Statistics Fall 2018 Centre for Mathematical Sciences Computer Exercise 0 Simulation of ARMA-processes The purpose of this computer exercise is to illustrate
Study of Time Series and Development of System Identification Model for Agarwada Raingauge Station
 Study of Time Series and Development of System Identification Model for Agarwada Raingauge Station N.A. Bhatia 1 and T.M.V.Suryanarayana 2 1 Teaching Assistant, 2 Assistant Professor, Water Resources Engineering
Study of Time Series and Development of System Identification Model for Agarwada Raingauge Station N.A. Bhatia 1 and T.M.V.Suryanarayana 2 1 Teaching Assistant, 2 Assistant Professor, Water Resources Engineering
A6523 Modeling, Inference, and Mining Jim Cordes, Cornell University
 A6523 Modeling, Inference, and Mining Jim Cordes, Cornell University Lecture 19 Modeling Topics plan: Modeling (linear/non- linear least squares) Bayesian inference Bayesian approaches to spectral esbmabon;
A6523 Modeling, Inference, and Mining Jim Cordes, Cornell University Lecture 19 Modeling Topics plan: Modeling (linear/non- linear least squares) Bayesian inference Bayesian approaches to spectral esbmabon;
J. Sjöberg et al. (1995):Non-linear Black-Box Modeling in System Identification: a Unified Overview, Automatica, Vol. 31, 12, str
:Non-linear Black-Box Modeling in System Identification: a Unified Overview, Automatica, Vol. 31, 12, str") Dynamic Systems Identification Part - Nonlinear systems Reference: J. Sjöberg et al. (995):Non-linear Black-Box Modeling in System Identification: a Unified Overview, Automatica, Vol. 3,, str. 69-74. Systems
Dynamic Systems Identification Part - Nonlinear systems Reference: J. Sjöberg et al. (995):Non-linear Black-Box Modeling in System Identification: a Unified Overview, Automatica, Vol. 3,, str. 69-74. Systems
Modeling and Predicting Chaotic Time Series
 Chapter 14 Modeling and Predicting Chaotic Time Series To understand the behavior of a dynamical system in terms of some meaningful parameters we seek the appropriate mathematical model that captures the
Chapter 14 Modeling and Predicting Chaotic Time Series To understand the behavior of a dynamical system in terms of some meaningful parameters we seek the appropriate mathematical model that captures the
Closed-Loop Identification of Fractionalorder Models using FOMCON Toolbox for MATLAB
 Closed-Loop Identification of Fractionalorder Models using FOMCON Toolbox for MATLAB Aleksei Tepljakov, Eduard Petlenkov, Juri Belikov October 7, 2014 Motivation, Contribution, and Outline The problem
Closed-Loop Identification of Fractionalorder Models using FOMCON Toolbox for MATLAB Aleksei Tepljakov, Eduard Petlenkov, Juri Belikov October 7, 2014 Motivation, Contribution, and Outline The problem
CONTINUOUS TIME D=0 ZOH D 0 D=0 FOH D 0
 IDENTIFICATION ASPECTS OF INTER- SAMPLE INPUT BEHAVIOR T. ANDERSSON, P. PUCAR and L. LJUNG University of Linkoping, Department of Electrical Engineering, S-581 83 Linkoping, Sweden Abstract. In this contribution
IDENTIFICATION ASPECTS OF INTER- SAMPLE INPUT BEHAVIOR T. ANDERSSON, P. PUCAR and L. LJUNG University of Linkoping, Department of Electrical Engineering, S-581 83 Linkoping, Sweden Abstract. In this contribution
Outline. Classical Control. Lecture 1
 Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
I. D. Landau, A. Karimi: A Course on Adaptive Control Adaptive Control. Part 9: Adaptive Control with Multiple Models and Switching
 I. D. Landau, A. Karimi: A Course on Adaptive Control - 5 1 Adaptive Control Part 9: Adaptive Control with Multiple Models and Switching I. D. Landau, A. Karimi: A Course on Adaptive Control - 5 2 Outline
I. D. Landau, A. Karimi: A Course on Adaptive Control - 5 1 Adaptive Control Part 9: Adaptive Control with Multiple Models and Switching I. D. Landau, A. Karimi: A Course on Adaptive Control - 5 2 Outline
Comparison of different seat-to-head transfer functions for vibrational comfort monitoring of car passengers
 Comparison of different seat-to-head transfer functions for vibrational comfort monitoring of car passengers Daniele Carnevale 1, Ettore Pennestrì 2, Pier Paolo Valentini 2, Fabrizio Scirè Ingastone 2,
Comparison of different seat-to-head transfer functions for vibrational comfort monitoring of car passengers Daniele Carnevale 1, Ettore Pennestrì 2, Pier Paolo Valentini 2, Fabrizio Scirè Ingastone 2,
Stationary or Non-Stationary Random Excitation for Vibration-Based Structural Damage Detection? An exploratory study
 Stationary or Non-Stationary Random Excitation for Vibration-Based Structural Damage Detection? An exploratory study Andriana S. GEORGANTOPOULOU & Spilios D. FASSOIS Stochastic Mechanical Systems & Automation
Stationary or Non-Stationary Random Excitation for Vibration-Based Structural Damage Detection? An exploratory study Andriana S. GEORGANTOPOULOU & Spilios D. FASSOIS Stochastic Mechanical Systems & Automation
Centre for Mathematical Sciences HT 2017 Mathematical Statistics. Study chapters 6.1, 6.2 and in the course book.
 Lund University Stationary stochastic processes Centre for Mathematical Sciences HT 2017 Mathematical Statistics Computer exercise 2 in Stationary stochastic processes, HT 17. The purpose with this computer
Lund University Stationary stochastic processes Centre for Mathematical Sciences HT 2017 Mathematical Statistics Computer exercise 2 in Stationary stochastic processes, HT 17. The purpose with this computer
7. Line Spectra Signal is assumed to consists of sinusoidals as
 7. Line Spectra Signal is assumed to consists of sinusoidals as n y(t) = α p e j(ω pt+ϕ p ) + e(t), p=1 (33a) where α p is amplitude, ω p [ π, π] is angular frequency and ϕ p initial phase. By using β
7. Line Spectra Signal is assumed to consists of sinusoidals as n y(t) = α p e j(ω pt+ϕ p ) + e(t), p=1 (33a) where α p is amplitude, ω p [ π, π] is angular frequency and ϕ p initial phase. By using β
EEM 409. Random Signals. Problem Set-2: (Power Spectral Density, LTI Systems with Random Inputs) Problem 1: Problem 2:
 Problem 1: Problem 2:") EEM 409 Random Signals Problem Set-2: (Power Spectral Density, LTI Systems with Random Inputs) Problem 1: Consider a random process of the form = + Problem 2: X(t) = b cos(2π t + ), where b is a constant,
EEM 409 Random Signals Problem Set-2: (Power Spectral Density, LTI Systems with Random Inputs) Problem 1: Consider a random process of the form = + Problem 2: X(t) = b cos(2π t + ), where b is a constant,
Further Results on Model Structure Validation for Closed Loop System Identification
 Advances in Wireless Communications and etworks 7; 3(5: 57-66 http://www.sciencepublishinggroup.com/j/awcn doi:.648/j.awcn.735. Further esults on Model Structure Validation for Closed Loop System Identification
Advances in Wireless Communications and etworks 7; 3(5: 57-66 http://www.sciencepublishinggroup.com/j/awcn doi:.648/j.awcn.735. Further esults on Model Structure Validation for Closed Loop System Identification
System Modeling and Identification CHBE 702 Korea University Prof. Dae Ryook Yang
 System Modeling and Identification CHBE 702 Korea University Prof. Dae Ryook Yang 1-1 Course Description Emphases Delivering concepts and Practice Programming Identification Methods using Matlab Class
System Modeling and Identification CHBE 702 Korea University Prof. Dae Ryook Yang 1-1 Course Description Emphases Delivering concepts and Practice Programming Identification Methods using Matlab Class
Lecture 5: Linear Systems. Transfer functions. Frequency Domain Analysis. Basic Control Design.
 ISS0031 Modeling and Identification Lecture 5: Linear Systems. Transfer functions. Frequency Domain Analysis. Basic Control Design. Aleksei Tepljakov, Ph.D. September 30, 2015 Linear Dynamic Systems Definition
ISS0031 Modeling and Identification Lecture 5: Linear Systems. Transfer functions. Frequency Domain Analysis. Basic Control Design. Aleksei Tepljakov, Ph.D. September 30, 2015 Linear Dynamic Systems Definition
Bounding the parameters of linear systems with stability constraints
 010 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 30-July 0, 010 WeC17 Bounding the parameters of linear systems with stability constraints V Cerone, D Piga, D Regruto Abstract
010 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 30-July 0, 010 WeC17 Bounding the parameters of linear systems with stability constraints V Cerone, D Piga, D Regruto Abstract
Control Systems I. Lecture 7: Feedback and the Root Locus method. Readings: Jacopo Tani. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 2, 2018 J. Tani, E. Frazzoli (ETH) Lecture 7:
Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 2, 2018 J. Tani, E. Frazzoli (ETH) Lecture 7:
3. ESTIMATION OF SIGNALS USING A LEAST SQUARES TECHNIQUE
 3. ESTIMATION OF SIGNALS USING A LEAST SQUARES TECHNIQUE 3.0 INTRODUCTION The purpose of this chapter is to introduce estimators shortly. More elaborated courses on System Identification, which are given
3. ESTIMATION OF SIGNALS USING A LEAST SQUARES TECHNIQUE 3.0 INTRODUCTION The purpose of this chapter is to introduce estimators shortly. More elaborated courses on System Identification, which are given
Least costly probing signal design for power system mode estimation
 1 Least costly probing signal design for power system mode estimation Vedran S. Perić, Xavier Bombois, Luigi Vanfretti KTH Royal Institute of Technology, Stockholm, Sweden NASPI Meeting, March 23, 2015.
1 Least costly probing signal design for power system mode estimation Vedran S. Perić, Xavier Bombois, Luigi Vanfretti KTH Royal Institute of Technology, Stockholm, Sweden NASPI Meeting, March 23, 2015.