2.161 Signal Processing: Continuous and Discrete
|
|
|
- Horatio Edwards
- 5 years ago
- Views:
Transcription
1 MIT OpenCourseWare Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit:
2 MASSACHUSETTS INSTITUTE OF TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING 2.6 Signal Processing - Continuous and Discrete Fall Term 2008 Solution of Problem Set 9 Assigned: November 20, 2008 Due: December 4, 2008 Problem : + + = xp(x)dx = x(λe λx )dx = e λx + ( x ) = λ λ µ x σ x = µ x 2 µ x = x 2 p(x)dx µ x = x2 (λe λx )dx 0 2 σ 2 = e λx 2 ( x + 2 ( x )) + x 0 = = λ λ λ 2 λ 2 λ 2 λ 2 σ x = λ λ 2 Problem 2: Φ ff ( jω) H ( j ω ) Φ gg ( j ω) - ω c ω c Input f is a white noise with flat spectrum and hence we assume that Φ ff (jω) =. The output can be computed from: Φ gg (jω) = H(jω) 2 Φ ff (jω) = H(jω) 2. = H(jω) 2 + ω c Φ gg (τ) = F (Φ gg (jω)) = H(jω) 2 e jwτ dω =.e jωτ ω c dω = sinc(ω c τ) = sin(ω cτ) 2π 2π π πτ ω c
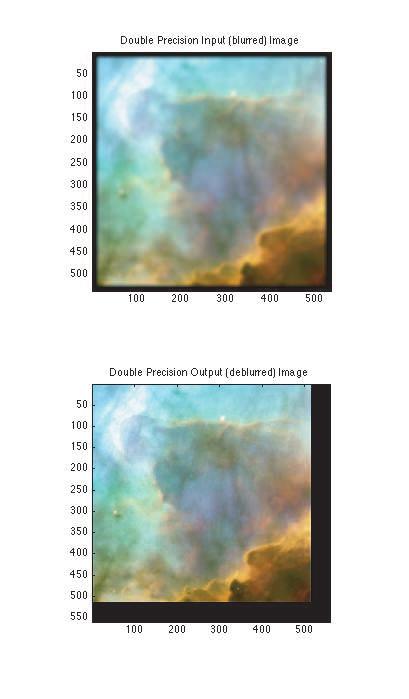
3 Problem 3:. M, E I J H J E C. E J A H / M. M 0 M L A H I A. E J A H 4 M. M 0 M 0 M 0 M 0 M. M The inverse filter for this high-precision problem can be implemented as the exact inverse of the input filter. We will revisit this problem in the 2nd quiz where additive noise of quantization imposes some modification to the inverse filter. Here is the code that we used. - Note that h kernel needs to be zero padded such that that image and h DFT have the same size. This ensures that their corresponding DFT matrix elements, correspond to the same (u, v) value and we can multiply them element-wise. - Note the color scaling at the end. All the color channels are scaled with the same scale, such that relative RGB pattern is not altered. clear all,close all,clc %% Read in the image load( blurredimage2.mat, blurred ) figure,subplot(2,,),image(blurred), axis image title( Double Precision Input (blurred) Image ) %% Determine the size of the image supplied pad = 24; imsize = size(blurred); xsize = imsize() + pad;ysize = imsize(2) + pad; % Take fft of image fftblur = fft2(blurred,xsize,ysize); % %% Design the inverse filter % Use a gaussian kernel from the image processing toolbox hsize=25;sigma = 3; h = fspecial( gaussian, hsize, sigma); ffth = fft2(h,xsize,ysize); % Create the inverse filter - this is just the simple form: fftinvh =./ffth; % figure % mesh(fftshift(abs(fftinvh))) % title( Inverse Filter Magnitude ) % %% Filter the image fftdeblur = zeros(xsize,ysize,3); for i=:3 fftdeblur(:,:,i) = fftinvh.*fftblur(:,:,i); end %% Inverse fft and Color Intensity Scaling deblurred = abs(ifft2(fftdeblur)); % Normalize the pixel intensity for the whole image % to set all values in the range 0 -- (already all are positive) maxpix = max(max(max(max(deblurred))),); deblurred = deblurred/maxpix; % Show the image subplot(2,,2),image(deblurred), axis image title( Double Precision Output (deblurred) Image ) 2


4 Double Precision Input (blurred) Image Double Precision Output (deblurred) Image
5 4
6 Problem 4: (This is from the take-home Quiz 2 from last year.) (a) The autocorrelation of the contaminated signal is φ gg (τ) = E {g(t)g(t + τ)} = E {(f(t) + αf(t Δ))(f(t + τ) + αf(t + τ Δ))} { } = E {(f(t)f(t + τ)} + E α 2 f(t Δ)f(t + τ Δ) +E {αf(t)f(t + τ Δ)} + E {αf(t + τ)f(t Δ)} and recognizing that φ ff (τ) does not depend on the time origin, (b) With the MATLAB code φ gg (τ) = ( + α 2 )φ ff (τ) + αφ ff (τ Δ) + αφ ff (τ + Δ) [f,fs,nbits] = wavread( PS9Prob4.wav ); L = length(f); figure(), plot(-(l-):l-, xcorr(f,f)) the following plot was annotated using the cursor tip Autocorrelation of input data X: 0 Y: X: 200 Y: 5.59 X: 200 Y: 5.59 phi shift 4 x 0 5
7 We assume that φ ff (0) >> φ ff (2τ), φ ff (τ) and then from (a) peaks on the graph correspond to: ( + α 2 )φ ff (0) αφ ff (0) 5.59 or α α + = 0 so that α Actually α = 0.3 and we will use α = 0.3 value. Similarly, from the autocorrelation function m = 200. (c) Recognize that Eq. (2) is a filter with H(z) = +αz Δ. Then the inverse filter H (z) = /H(z) to remove the echo is H (z) = + αz Δ which is an IIR filter with a difference equation f n = αf n m + g n. (d) Below is the complete MATLAB code to implement the filter and filter the data: [f,fs,nbits] = wavread( PS9Prob4.wav ); L = length(f); figure(), plot(-(l-):l-, xcorr(f,f)) title( Autocorrelation of input data ) xlabel( shift ) ylabel( phi ) % Look at the autocorrelation function wavplay(f,fs) % Determine that the delay is 200 and alpha=0.3 delay = 200; alpha = 0.3; % Recursive filter: % Set up the denominator: a = zeros(,20); a() = ; a(20) = alpha; y = filter(, a, f); figure(2), plot(-(l-):l-, xcorr(y,y)) title( Autocorrelation of processed data (IIR filter) ) xlabel( shift ) ylabel( phi ) % wavplay(f,fs) which produced the following output autocorrelation plot 6
8 60 Autocorrelation of processed data (IIR filter) phi shift 4 x 0 Note that the echo components have been eliminated. 7
Massachusetts Institute of Technology
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.011: Introduction to Communication, Control and Signal Processing QUIZ 1, March 16, 2010 ANSWER BOOKLET
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.011: Introduction to Communication, Control and Signal Processing QUIZ 1, March 16, 2010 ANSWER BOOKLET
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.6 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
MIT OpenCourseWare http://ocw.mit.edu 2.6 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
2.161 Signal Processing: Continuous and Discrete Fall 2008
 IT OpenCourseWare http://ocw.mit.edu 2.6 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. ASSACHUSETTS
IT OpenCourseWare http://ocw.mit.edu 2.6 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. ASSACHUSETTS
Massachusetts Institute of Technology
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.11: Introduction to Communication, Control and Signal Processing QUIZ 1, March 16, 21 QUESTION BOOKLET
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.11: Introduction to Communication, Control and Signal Processing QUIZ 1, March 16, 21 QUESTION BOOKLET
6.003 (Fall 2011) Quiz #3 November 16, 2011
 Quiz #3 November 16, 2011") 6.003 (Fall 2011) Quiz #3 November 16, 2011 Name: Kerberos Username: Please circle your section number: Section Time 2 11 am 3 1 pm 4 2 pm Grades will be determined by the correctness of your answers (explanations
6.003 (Fall 2011) Quiz #3 November 16, 2011 Name: Kerberos Username: Please circle your section number: Section Time 2 11 am 3 1 pm 4 2 pm Grades will be determined by the correctness of your answers (explanations
2.161 Signal Processing: Continuous and Discrete
 MIT OpenCourseWare http://ocw.mit.edu.6 Signal Processing: Continuous and Discrete Fall 8 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
MIT OpenCourseWare http://ocw.mit.edu.6 Signal Processing: Continuous and Discrete Fall 8 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
Massachusetts Institute of Technology
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.011: Introduction to Communication, Control and Signal Processing QUIZ, April 1, 010 QUESTION BOOKLET Your
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.011: Introduction to Communication, Control and Signal Processing QUIZ, April 1, 010 QUESTION BOOKLET Your
Homework 6 Solutions
 8-290 Signals and Systems Profs. Byron Yu and Pulkit Grover Fall 208 Homework 6 Solutions. Part One. (2 points) Consider an LTI system with impulse response h(t) e αt u(t), (a) Compute the frequency response
8-290 Signals and Systems Profs. Byron Yu and Pulkit Grover Fall 208 Homework 6 Solutions. Part One. (2 points) Consider an LTI system with impulse response h(t) e αt u(t), (a) Compute the frequency response
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
Recursive, Infinite Impulse Response (IIR) Digital Filters:
 Digital Filters:") Recursive, Infinite Impulse Response (IIR) Digital Filters: Filters defined by Laplace Domain transfer functions (analog devices) can be easily converted to Z domain transfer functions (digital, sampled
Recursive, Infinite Impulse Response (IIR) Digital Filters: Filters defined by Laplace Domain transfer functions (analog devices) can be easily converted to Z domain transfer functions (digital, sampled
2.161 Signal Processing: Continuous and Discrete
 MIT OpenCourseWare http://ocw.mit.edu.6 Signal Processing: Continuous and Discrete Fall 008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. M MASSACHUSETTS
MIT OpenCourseWare http://ocw.mit.edu.6 Signal Processing: Continuous and Discrete Fall 008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. M MASSACHUSETTS
Grades will be determined by the correctness of your answers (explanations are not required).
.") 6.00 (Fall 2011) Final Examination December 19, 2011 Name: Kerberos Username: Please circle your section number: Section Time 2 11 am 1 pm 4 2 pm Grades will be determined by the correctness of your answers
6.00 (Fall 2011) Final Examination December 19, 2011 Name: Kerberos Username: Please circle your section number: Section Time 2 11 am 1 pm 4 2 pm Grades will be determined by the correctness of your answers
Homework 5 Solutions
 18-290 Signals and Systems Profs. Byron Yu and Pulkit Grover Fall 2018 Homework 5 Solutions. Part One 1. (12 points) Calculate the following convolutions: (a) x[n] δ[n n 0 ] (b) 2 n u[n] u[n] (c) 2 n u[n]
18-290 Signals and Systems Profs. Byron Yu and Pulkit Grover Fall 2018 Homework 5 Solutions. Part One 1. (12 points) Calculate the following convolutions: (a) x[n] δ[n n 0 ] (b) 2 n u[n] u[n] (c) 2 n u[n]
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MI OpenCourseWare http://ocw.mit.edu.6 Signal Processing: Continuous and Discrete Fall 008 For information about citing these materials or our erms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
MI OpenCourseWare http://ocw.mit.edu.6 Signal Processing: Continuous and Discrete Fall 008 For information about citing these materials or our erms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
2.161 Signal Processing: Continuous and Discrete
 MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 28 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 28 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
Random signals II. ÚPGM FIT VUT Brno,
 Random signals II. Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 Temporal estimate of autocorrelation coefficients for ergodic discrete-time random process. ˆR[k] = 1 N N 1 n=0 x[n]x[n + k],
Random signals II. Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 Temporal estimate of autocorrelation coefficients for ergodic discrete-time random process. ˆR[k] = 1 N N 1 n=0 x[n]x[n + k],
COMP344 Digital Image Processing Fall 2007 Final Examination
 COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
Department of Electrical and Computer Engineering Digital Speech Processing Homework No. 6 Solutions
 Problem 1 Department of Electrical and Computer Engineering Digital Speech Processing Homework No. 6 Solutions The complex cepstrum, ˆx[n], of a sequence x[n] is the inverse Fourier transform of the complex
Problem 1 Department of Electrical and Computer Engineering Digital Speech Processing Homework No. 6 Solutions The complex cepstrum, ˆx[n], of a sequence x[n] is the inverse Fourier transform of the complex
Transform Representation of Signals
 C H A P T E R 3 Transform Representation of Signals and LTI Systems As you have seen in your prior studies of signals and systems, and as emphasized in the review in Chapter 2, transforms play a central
C H A P T E R 3 Transform Representation of Signals and LTI Systems As you have seen in your prior studies of signals and systems, and as emphasized in the review in Chapter 2, transforms play a central
Homework 5 Solutions
 18-290 Signals and Systems Profs. Byron Yu and Pulkit Grover Fall 2017 Homework 5 Solutions Part One 1. (18 points) For each of the following impulse responses, determine whether the corresponding LTI
18-290 Signals and Systems Profs. Byron Yu and Pulkit Grover Fall 2017 Homework 5 Solutions Part One 1. (18 points) For each of the following impulse responses, determine whether the corresponding LTI
Grades will be determined by the correctness of your answers (explanations are not required).
.") 6.00 (Fall 20) Final Examination December 9, 20 Name: Kerberos Username: Please circle your section number: Section Time 2 am pm 4 2 pm Grades will be determined by the correctness of your answers (explanations
6.00 (Fall 20) Final Examination December 9, 20 Name: Kerberos Username: Please circle your section number: Section Time 2 am pm 4 2 pm Grades will be determined by the correctness of your answers (explanations
Correlation, discrete Fourier transforms and the power spectral density
 Correlation, discrete Fourier transforms and the power spectral density visuals to accompany lectures, notes and m-files by Tak Igusa tigusa@jhu.edu Department of Civil Engineering Johns Hopkins University
Correlation, discrete Fourier transforms and the power spectral density visuals to accompany lectures, notes and m-files by Tak Igusa tigusa@jhu.edu Department of Civil Engineering Johns Hopkins University
/ (2π) X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by
 X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by") Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
NAME: ht () 1 2π. Hj0 ( ) dω Find the value of BW for the system having the following impulse response.
 1 2π. Hj0 ( ) dω Find the value of BW for the system having the following impulse response.") University of California at Berkeley Department of Electrical Engineering and Computer Sciences Professor J. M. Kahn, EECS 120, Fall 1998 Final Examination, Wednesday, December 16, 1998, 5-8 pm NAME: 1.
University of California at Berkeley Department of Electrical Engineering and Computer Sciences Professor J. M. Kahn, EECS 120, Fall 1998 Final Examination, Wednesday, December 16, 1998, 5-8 pm NAME: 1.
Laboratorio di Problemi Inversi Esercitazione 2: filtraggio spettrale
 Laboratorio di Problemi Inversi Esercitazione 2: filtraggio spettrale Luca Calatroni Dipartimento di Matematica, Universitá degli studi di Genova Aprile 2016. Luca Calatroni (DIMA, Unige) Esercitazione
Laboratorio di Problemi Inversi Esercitazione 2: filtraggio spettrale Luca Calatroni Dipartimento di Matematica, Universitá degli studi di Genova Aprile 2016. Luca Calatroni (DIMA, Unige) Esercitazione
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
DFT & Fast Fourier Transform PART-A. 7. Calculate the number of multiplications needed in the calculation of DFT and FFT with 64 point sequence.
 SHRI ANGALAMMAN COLLEGE OF ENGINEERING & TECHNOLOGY (An ISO 9001:2008 Certified Institution) SIRUGANOOR,TRICHY-621105. DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING UNIT I DFT & Fast Fourier
SHRI ANGALAMMAN COLLEGE OF ENGINEERING & TECHNOLOGY (An ISO 9001:2008 Certified Institution) SIRUGANOOR,TRICHY-621105. DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING UNIT I DFT & Fast Fourier
Fast Fourier Transform Discrete-time windowing Discrete Fourier Transform Relationship to DTFT Relationship to DTFS Zero padding
 Fast Fourier Transform Discrete-time windowing Discrete Fourier Transform Relationship to DTFT Relationship to DTFS Zero padding Fourier Series & Transform Summary x[n] = X[k] = 1 N k= n= X[k]e jkω
Fast Fourier Transform Discrete-time windowing Discrete Fourier Transform Relationship to DTFT Relationship to DTFS Zero padding Fourier Series & Transform Summary x[n] = X[k] = 1 N k= n= X[k]e jkω
E : Lecture 1 Introduction
 E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
Fast Fourier Transform Discrete-time windowing Discrete Fourier Transform Relationship to DTFT Relationship to DTFS Zero padding
 Fast Fourier Transform Discrete-time windowing Discrete Fourier Transform Relationship to DTFT Relationship to DTFS Zero padding J. McNames Portland State University ECE 223 FFT Ver. 1.03 1 Fourier Series
Fast Fourier Transform Discrete-time windowing Discrete Fourier Transform Relationship to DTFT Relationship to DTFS Zero padding J. McNames Portland State University ECE 223 FFT Ver. 1.03 1 Fourier Series
Cast of Characters. Some Symbols, Functions, and Variables Used in the Book
 Page 1 of 6 Cast of Characters Some s, Functions, and Variables Used in the Book Digital Signal Processing and the Microcontroller by Dale Grover and John R. Deller ISBN 0-13-081348-6 Prentice Hall, 1998
Page 1 of 6 Cast of Characters Some s, Functions, and Variables Used in the Book Digital Signal Processing and the Microcontroller by Dale Grover and John R. Deller ISBN 0-13-081348-6 Prentice Hall, 1998
LAB 2: DTFT, DFT, and DFT Spectral Analysis Summer 2011
 University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 2: DTFT, DFT, and DFT Spectral
University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 2: DTFT, DFT, and DFT Spectral
Lecture 9 Infinite Impulse Response Filters
 Lecture 9 Infinite Impulse Response Filters Outline 9 Infinite Impulse Response Filters 9 First-Order Low-Pass Filter 93 IIR Filter Design 5 93 CT Butterworth filter design 5 93 Bilinear transform 7 9
Lecture 9 Infinite Impulse Response Filters Outline 9 Infinite Impulse Response Filters 9 First-Order Low-Pass Filter 93 IIR Filter Design 5 93 CT Butterworth filter design 5 93 Bilinear transform 7 9
Chapter 10. Timing Recovery. March 12, 2008
 Chapter 10 Timing Recovery March 12, 2008 b[n] coder bit/ symbol transmit filter, pt(t) Modulator Channel, c(t) noise interference form other users LNA/ AGC Demodulator receive/matched filter, p R(t) sampler
Chapter 10 Timing Recovery March 12, 2008 b[n] coder bit/ symbol transmit filter, pt(t) Modulator Channel, c(t) noise interference form other users LNA/ AGC Demodulator receive/matched filter, p R(t) sampler
6.241 Dynamic Systems and Control
 6.241 Dynamic Systems and Control Lecture 12: I/O Stability Readings: DDV, Chapters 15, 16 Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology March 14, 2011 E. Frazzoli
6.241 Dynamic Systems and Control Lecture 12: I/O Stability Readings: DDV, Chapters 15, 16 Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology March 14, 2011 E. Frazzoli
Digital Signal Processing: Signal Transforms
 Digital Signal Processing: Signal Transforms Aishy Amer, Mohammed Ghazal January 19, 1 Instructions: 1. This tutorial introduces frequency analysis in Matlab using the Fourier and z transforms.. More Matlab
Digital Signal Processing: Signal Transforms Aishy Amer, Mohammed Ghazal January 19, 1 Instructions: 1. This tutorial introduces frequency analysis in Matlab using the Fourier and z transforms.. More Matlab
ECE503: Digital Signal Processing Lecture 5
 ECE53: Digital Signal Processing Lecture 5 D. Richard Brown III WPI 3-February-22 WPI D. Richard Brown III 3-February-22 / 32 Lecture 5 Topics. Magnitude and phase characterization of transfer functions
ECE53: Digital Signal Processing Lecture 5 D. Richard Brown III WPI 3-February-22 WPI D. Richard Brown III 3-February-22 / 32 Lecture 5 Topics. Magnitude and phase characterization of transfer functions
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. I Reading:
MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. I Reading:
Lab 4: Quantization, Oversampling, and Noise Shaping
 Lab 4: Quantization, Oversampling, and Noise Shaping Due Friday 04/21/17 Overview: This assignment should be completed with your assigned lab partner(s). Each group must turn in a report composed using
Lab 4: Quantization, Oversampling, and Noise Shaping Due Friday 04/21/17 Overview: This assignment should be completed with your assigned lab partner(s). Each group must turn in a report composed using
Solutions for examination in TSRT78 Digital Signal Processing,
 Solutions for examination in TSRT78 Digital Signal Processing, 2014-04-14 1. s(t) is generated by s(t) = 1 w(t), 1 + 0.3q 1 Var(w(t)) = σ 2 w = 2. It is measured as y(t) = s(t) + n(t) where n(t) is white
Solutions for examination in TSRT78 Digital Signal Processing, 2014-04-14 1. s(t) is generated by s(t) = 1 w(t), 1 + 0.3q 1 Var(w(t)) = σ 2 w = 2. It is measured as y(t) = s(t) + n(t) where n(t) is white
HARMONIC WAVELET TRANSFORM SIGNAL DECOMPOSITION AND MODIFIED GROUP DELAY FOR IMPROVED WIGNER- VILLE DISTRIBUTION
 HARMONIC WAVELET TRANSFORM SIGNAL DECOMPOSITION AND MODIFIED GROUP DELAY FOR IMPROVED WIGNER- VILLE DISTRIBUTION IEEE 004. All rights reserved. This paper was published in Proceedings of International
HARMONIC WAVELET TRANSFORM SIGNAL DECOMPOSITION AND MODIFIED GROUP DELAY FOR IMPROVED WIGNER- VILLE DISTRIBUTION IEEE 004. All rights reserved. This paper was published in Proceedings of International
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science : Discrete-Time Signal Processing
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.34: Discrete-Time Signal Processing OpenCourseWare 006 ecture 8 Periodogram Reading: Sections 0.6 and 0.7
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.34: Discrete-Time Signal Processing OpenCourseWare 006 ecture 8 Periodogram Reading: Sections 0.6 and 0.7
Linear Operators and Fourier Transform
 Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Aspects of Continuous- and Discrete-Time Signals and Systems
 Aspects of Continuous- and Discrete-Time Signals and Systems C.S. Ramalingam Department of Electrical Engineering IIT Madras C.S. Ramalingam (EE Dept., IIT Madras) Networks and Systems 1 / 45 Scaling the
Aspects of Continuous- and Discrete-Time Signals and Systems C.S. Ramalingam Department of Electrical Engineering IIT Madras C.S. Ramalingam (EE Dept., IIT Madras) Networks and Systems 1 / 45 Scaling the
University of Waterloo Department of Electrical and Computer Engineering ECE 413 Digital Signal Processing. Spring Home Assignment 2 Solutions
 University of Waterloo Department of Electrical and Computer Engineering ECE 13 Digital Signal Processing Spring 017 Home Assignment Solutions Due on June 8, 017 Exercise 1 An LTI system is described by
University of Waterloo Department of Electrical and Computer Engineering ECE 13 Digital Signal Processing Spring 017 Home Assignment Solutions Due on June 8, 017 Exercise 1 An LTI system is described by
Quantization and Compensation in Sampled Interleaved Multi-Channel Systems
 Quantization and Compensation in Sampled Interleaved Multi-Channel Systems The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation
Quantization and Compensation in Sampled Interleaved Multi-Channel Systems The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation
Each problem is worth 25 points, and you may solve the problems in any order.
 EE 120: Signals & Systems Department of Electrical Engineering and Computer Sciences University of California, Berkeley Midterm Exam #2 April 11, 2016, 2:10-4:00pm Instructions: There are four questions
EE 120: Signals & Systems Department of Electrical Engineering and Computer Sciences University of California, Berkeley Midterm Exam #2 April 11, 2016, 2:10-4:00pm Instructions: There are four questions
This homework will not be collected or graded. It is intended to help you practice for the final exam. Solutions will be posted.
 6.003 Homework #14 This homework will not be collected or graded. It is intended to help you practice for the final exam. Solutions will be posted. Problems 1. Neural signals The following figure illustrates
6.003 Homework #14 This homework will not be collected or graded. It is intended to help you practice for the final exam. Solutions will be posted. Problems 1. Neural signals The following figure illustrates
2.161 Signal Processing: Continuous and Discrete Fall 2008
 IT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete all 2008 or information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. assachusetts
IT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete all 2008 or information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. assachusetts
Digital Signal Processing Lecture 10 - Discrete Fourier Transform
 Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal rocessing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal rocessing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Frequency Response. Re ve jφ e jωt ( ) where v is the amplitude and φ is the phase of the sinusoidal signal v(t). ve jφ
 where v is the amplitude and φ is the phase of the sinusoidal signal v(t). ve jφ") 27 Frequency Response Before starting, review phasor analysis, Bode plots... Key concept: small-signal models for amplifiers are linear and therefore, cosines and sines are solutions of the linear differential
27 Frequency Response Before starting, review phasor analysis, Bode plots... Key concept: small-signal models for amplifiers are linear and therefore, cosines and sines are solutions of the linear differential
6.003: Signals and Systems. CT Fourier Transform
 6.003: Signals and Systems CT Fourier Transform April 8, 200 CT Fourier Transform Representing signals by their frequency content. X(jω)= x(t)e jωt dt ( analysis equation) x(t)= 2π X(jω)e jωt dω ( synthesis
6.003: Signals and Systems CT Fourier Transform April 8, 200 CT Fourier Transform Representing signals by their frequency content. X(jω)= x(t)e jωt dt ( analysis equation) x(t)= 2π X(jω)e jωt dω ( synthesis
Session 1 : Fundamental concepts
 BRUFACE Vibrations and Acoustics MA1 Academic year 17-18 Cédric Dumoulin (cedumoul@ulb.ac.be) Arnaud Deraemaeker (aderaema@ulb.ac.be) Exercise 1 Session 1 : Fundamental concepts Consider the following
BRUFACE Vibrations and Acoustics MA1 Academic year 17-18 Cédric Dumoulin (cedumoul@ulb.ac.be) Arnaud Deraemaeker (aderaema@ulb.ac.be) Exercise 1 Session 1 : Fundamental concepts Consider the following
9 Forward-backward algorithm, sum-product on factor graphs
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.438 Algorithms For Inference Fall 2014 9 Forward-backward algorithm, sum-product on factor graphs The previous
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.438 Algorithms For Inference Fall 2014 9 Forward-backward algorithm, sum-product on factor graphs The previous
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.6 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
MIT OpenCourseWare http://ocw.mit.edu 2.6 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
9.07 MATLAB Tutorial. Camilo Lamus. October 1, 2010
 9.07 MATLAB Tutorial Camilo Lamus October 1, 2010 1 / 22 1 / 22 Aim Transform students into MATLAB ninjas! Source Unknown. All rights reserved. This content is excluded from our Creative Commons license.
9.07 MATLAB Tutorial Camilo Lamus October 1, 2010 1 / 22 1 / 22 Aim Transform students into MATLAB ninjas! Source Unknown. All rights reserved. This content is excluded from our Creative Commons license.
ECSE 512 Digital Signal Processing I Fall 2010 FINAL EXAMINATION
 FINAL EXAMINATION 9:00 am 12:00 pm, December 20, 2010 Duration: 180 minutes Examiner: Prof. M. Vu Assoc. Examiner: Prof. B. Champagne There are 6 questions for a total of 120 points. This is a closed book
FINAL EXAMINATION 9:00 am 12:00 pm, December 20, 2010 Duration: 180 minutes Examiner: Prof. M. Vu Assoc. Examiner: Prof. B. Champagne There are 6 questions for a total of 120 points. This is a closed book
Today s lecture. Local neighbourhood processing. The convolution. Removing uncorrelated noise from an image The Fourier transform
 Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
2.72 Elements of Mechanical Design
 MIT OpenCourseWare http://ocw.mit.edu 2.72 Elements of Mechanical Design Spring 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 2.72 Elements of
MIT OpenCourseWare http://ocw.mit.edu 2.72 Elements of Mechanical Design Spring 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 2.72 Elements of
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu.6 Signal Processing: Continuous and Discrete Fall 8 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Introduction
MIT OpenCourseWare http://ocw.mit.edu.6 Signal Processing: Continuous and Discrete Fall 8 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Introduction
APPLIED SIGNAL PROCESSING
 APPLIED SIGNAL PROCESSING DIGITAL FILTERS Digital filters are discrete-time linear systems { x[n] } G { y[n] } Impulse response: y[n] = h[0]x[n] + h[1]x[n 1] + 2 DIGITAL FILTER TYPES FIR (Finite Impulse
APPLIED SIGNAL PROCESSING DIGITAL FILTERS Digital filters are discrete-time linear systems { x[n] } G { y[n] } Impulse response: y[n] = h[0]x[n] + h[1]x[n 1] + 2 DIGITAL FILTER TYPES FIR (Finite Impulse
Figure 1.1.1: Magnitude ratio as a function of time using normalized temperature data
 9Student : Solutions to Technical Questions Assignment : Lab 3 Technical Questions Date : 1 November 212 Course Title : Introduction to Measurements and Data Analysis Course Number : AME 2213 Instructor
9Student : Solutions to Technical Questions Assignment : Lab 3 Technical Questions Date : 1 November 212 Course Title : Introduction to Measurements and Data Analysis Course Number : AME 2213 Instructor
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
sinc function T=1 sec T=2 sec angle(f(w)) angle(f(w))
) angle(f(w))") T=1 sec sinc function 3 angle(f(w)) T=2 sec angle(f(w)) 1 A quick script to plot mag & phase in MATLAB w=0:0.2:50; Real exponential func b=5; Fourier transform (filter) F=1.0./(b+j*w); subplot(211), plot(w,
T=1 sec sinc function 3 angle(f(w)) T=2 sec angle(f(w)) 1 A quick script to plot mag & phase in MATLAB w=0:0.2:50; Real exponential func b=5; Fourier transform (filter) F=1.0./(b+j*w); subplot(211), plot(w,
EE 224 Lab: Graph Signal Processing
 EE Lab: Graph Signal Processing In our previous labs, we dealt with discrete-time signals and images. We learned convolution, translation, sampling, and frequency domain representation of discrete-time
EE Lab: Graph Signal Processing In our previous labs, we dealt with discrete-time signals and images. We learned convolution, translation, sampling, and frequency domain representation of discrete-time
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
The O () notation. Definition: Let f(n), g(n) be functions of the natural (or real)
 notation. Definition: Let f(n), g(n) be functions of the natural (or real)") The O () notation When analyzing the runtime of an algorithm, we want to consider the time required for large n. We also want to ignore constant factors (which often stem from tricks and do not indicate
The O () notation When analyzing the runtime of an algorithm, we want to consider the time required for large n. We also want to ignore constant factors (which often stem from tricks and do not indicate
Digital Signal Processing Lecture 9 - Design of Digital Filters - FIR
 Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
DESIGN OF MULTI-DIMENSIONAL DERIVATIVE FILTERS. Eero P. Simoncelli
 Published in: First IEEE Int l Conf on Image Processing, Austin Texas, vol I, pages 790--793, November 1994. DESIGN OF MULTI-DIMENSIONAL DERIVATIVE FILTERS Eero P. Simoncelli GRASP Laboratory, Room 335C
Published in: First IEEE Int l Conf on Image Processing, Austin Texas, vol I, pages 790--793, November 1994. DESIGN OF MULTI-DIMENSIONAL DERIVATIVE FILTERS Eero P. Simoncelli GRASP Laboratory, Room 335C
Computational Methods for Astrophysics: Fourier Transforms
 Computational Methods for Astrophysics: Fourier Transforms John T. Whelan (filling in for Joshua Faber) April 27, 2011 John T. Whelan April 27, 2011 Fourier Transforms 1/13 Fourier Analysis Outline: Fourier
Computational Methods for Astrophysics: Fourier Transforms John T. Whelan (filling in for Joshua Faber) April 27, 2011 John T. Whelan April 27, 2011 Fourier Transforms 1/13 Fourier Analysis Outline: Fourier
Math 56 Homework 5 Michael Downs
 1. (a) Since f(x) = cos(6x) = ei6x 2 + e i6x 2, due to the orthogonality of each e inx, n Z, the only nonzero (complex) fourier coefficients are ˆf 6 and ˆf 6 and they re both 1 2 (which is also seen from
1. (a) Since f(x) = cos(6x) = ei6x 2 + e i6x 2, due to the orthogonality of each e inx, n Z, the only nonzero (complex) fourier coefficients are ˆf 6 and ˆf 6 and they re both 1 2 (which is also seen from
LAB 6: FIR Filter Design Summer 2011
 University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 6: FIR Filter Design Summer 011
University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 6: FIR Filter Design Summer 011
3F1 Random Processes Examples Paper (for all 6 lectures)
") 3F Random Processes Examples Paper (for all 6 lectures). Three factories make the same electrical component. Factory A supplies half of the total number of components to the central depot, while factories
3F Random Processes Examples Paper (for all 6 lectures). Three factories make the same electrical component. Factory A supplies half of the total number of components to the central depot, while factories
ECE 598: The Speech Chain. Lecture 5: Room Acoustics; Filters
 ECE 598: The Speech Chain Lecture 5: Room Acoustics; Filters Today Room = A Source of Echoes Echo = Delayed, Scaled Copy Addition and Subtraction of Scaled Cosines Frequency Response Impulse Response Filter
ECE 598: The Speech Chain Lecture 5: Room Acoustics; Filters Today Room = A Source of Echoes Echo = Delayed, Scaled Copy Addition and Subtraction of Scaled Cosines Frequency Response Impulse Response Filter
Lecture 14: Windowing
 Lecture 14: Windowing ECE 401: Signal and Image Analysis University of Illinois 3/29/2017 1 DTFT Review 2 Windowing 3 Practical Windows Outline 1 DTFT Review 2 Windowing 3 Practical Windows DTFT Review
Lecture 14: Windowing ECE 401: Signal and Image Analysis University of Illinois 3/29/2017 1 DTFT Review 2 Windowing 3 Practical Windows Outline 1 DTFT Review 2 Windowing 3 Practical Windows DTFT Review
Atmospheric Flight Dynamics Example Exam 2 Solutions
 Atmospheric Flight Dynamics Example Exam Solutions 1 Question Given the autocovariance function, C x x (τ) = 1 cos(πτ) (1.1) of stochastic variable x. Calculate the autospectrum S x x (ω). NOTE Assume
Atmospheric Flight Dynamics Example Exam Solutions 1 Question Given the autocovariance function, C x x (τ) = 1 cos(πτ) (1.1) of stochastic variable x. Calculate the autospectrum S x x (ω). NOTE Assume
DSP Configurations. responded with: thus the system function for this filter would be
 DSP Configurations In this lecture we discuss the different physical (or software) configurations that can be used to actually realize or implement DSP functions. Recall that the general form of a DSP
DSP Configurations In this lecture we discuss the different physical (or software) configurations that can be used to actually realize or implement DSP functions. Recall that the general form of a DSP
Digital Filters Ying Sun
 Digital Filters Ying Sun Digital filters Finite impulse response (FIR filter: h[n] has a finite numbers of terms. Infinite impulse response (IIR filter: h[n] has infinite numbers of terms. Causal filter:
Digital Filters Ying Sun Digital filters Finite impulse response (FIR filter: h[n] has a finite numbers of terms. Infinite impulse response (IIR filter: h[n] has infinite numbers of terms. Causal filter:
ω (rad/s)
") 1. (a) From the figure we see that the signal has energy content in frequencies up to about 15rad/s. According to the sampling theorem, we must therefore sample with at least twice that frequency: 3rad/s
1. (a) From the figure we see that the signal has energy content in frequencies up to about 15rad/s. According to the sampling theorem, we must therefore sample with at least twice that frequency: 3rad/s
Overview of Sampling Topics
 Overview of Sampling Topics (Shannon) sampling theorem Impulse-train sampling Interpolation (continuous-time signal reconstruction) Aliasing Relationship of CTFT to DTFT DT processing of CT signals DT
Overview of Sampling Topics (Shannon) sampling theorem Impulse-train sampling Interpolation (continuous-time signal reconstruction) Aliasing Relationship of CTFT to DTFT DT processing of CT signals DT
The basic structure of the L-channel QMF bank is shown below
 -Channel QMF Bans The basic structure of the -channel QMF ban is shown below The expressions for the -transforms of various intermediate signals in the above structure are given by Copyright, S. K. Mitra
-Channel QMF Bans The basic structure of the -channel QMF ban is shown below The expressions for the -transforms of various intermediate signals in the above structure are given by Copyright, S. K. Mitra
Discrete-Time Signals and Systems
 ECE 46 Lec Viewgraph of 35 Discrete-Time Signals and Systems Sequences: x { x[ n] }, < n
ECE 46 Lec Viewgraph of 35 Discrete-Time Signals and Systems Sequences: x { x[ n] }, < n
University of Illinois at Urbana-Champaign ECE 310: Digital Signal Processing
 University of Illinois at Urbana-Champaign ECE 3: Digital Signal Processing Chandra Radhakrishnan PROBLEM SE 5: SOLUIONS Peter Kairouz Problem o derive x a (t (X a (Ω from X d (ω, we first need to get
University of Illinois at Urbana-Champaign ECE 3: Digital Signal Processing Chandra Radhakrishnan PROBLEM SE 5: SOLUIONS Peter Kairouz Problem o derive x a (t (X a (Ω from X d (ω, we first need to get
Filtering in the Frequency Domain
 Filtering in the Frequency Domain Dr. Praveen Sankaran Department of ECE NIT Calicut January 11, 2013 Outline 1 Preliminary Concepts 2 Signal A measurable phenomenon that changes over time or throughout
Filtering in the Frequency Domain Dr. Praveen Sankaran Department of ECE NIT Calicut January 11, 2013 Outline 1 Preliminary Concepts 2 Signal A measurable phenomenon that changes over time or throughout
Core Concepts Review. Orthogonality of Complex Sinusoids Consider two (possibly non-harmonic) complex sinusoids
 complex sinusoids") Overview of Continuous-Time Fourier Transform Topics Definition Compare & contrast with Laplace transform Conditions for existence Relationship to LTI systems Examples Ideal lowpass filters Relationship
Overview of Continuous-Time Fourier Transform Topics Definition Compare & contrast with Laplace transform Conditions for existence Relationship to LTI systems Examples Ideal lowpass filters Relationship
Analog vs. discrete signals
 Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
LTI H. the system H when xn [ ] is the input.
![LTI H. the system H when xn [ ] is the input.](/thumbs/81/84326358.jpg "LTI H. the system H when xn [ ] is the input.") REVIEW OF 1D LTI SYSTEMS LTI xn [ ] y[ n] H Operator notation: y[ n] = H{ x[ n] } In English, this is read: yn [ ] is the output of the system H when xn [ ] is the input. 2 THE MOST IMPORTANT PROPERTIES
REVIEW OF 1D LTI SYSTEMS LTI xn [ ] y[ n] H Operator notation: y[ n] = H{ x[ n] } In English, this is read: yn [ ] is the output of the system H when xn [ ] is the input. 2 THE MOST IMPORTANT PROPERTIES
x[n] = x a (nt ) x a (t)e jωt dt while the discrete time signal x[n] has the discrete-time Fourier transform x[n]e jωn
![x[n] = x a (nt ) x a (t)e jωt dt while the discrete time signal x[n] has the discrete-time Fourier transform x[n]e jωn](/thumbs/82/86357929.jpg "x[n] = x a (nt ) x a (t)e jωt dt while the discrete time signal x[n] has the discrete-time Fourier transform x[n]e jωn") Sampling Let x a (t) be a continuous time signal. The signal is sampled by taking the signal value at intervals of time T to get The signal x(t) has a Fourier transform x[n] = x a (nt ) X a (Ω) = x a (t)e
Sampling Let x a (t) be a continuous time signal. The signal is sampled by taking the signal value at intervals of time T to get The signal x(t) has a Fourier transform x[n] = x a (nt ) X a (Ω) = x a (t)e
Signals and Systems Spring 2004 Lecture #9
 Signals and Systems Spring 2004 Lecture #9 (3/4/04). The convolution Property of the CTFT 2. Frequency Response and LTI Systems Revisited 3. Multiplication Property and Parseval s Relation 4. The DT Fourier
Signals and Systems Spring 2004 Lecture #9 (3/4/04). The convolution Property of the CTFT 2. Frequency Response and LTI Systems Revisited 3. Multiplication Property and Parseval s Relation 4. The DT Fourier
Outline. Convolution. Filtering
 Filtering Outline Convolution Filtering Logistics HW1 HW2 - out tomorrow Recall: what is a digital (grayscale) image? Matrix of integer values Images as height fields Let s think of image as zero-padded
Filtering Outline Convolution Filtering Logistics HW1 HW2 - out tomorrow Recall: what is a digital (grayscale) image? Matrix of integer values Images as height fields Let s think of image as zero-padded
Histogram Processing
 Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
2.004 Dynamics and Control II Spring 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.004 Dynamics and Control II Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Institute
MIT OpenCourseWare http://ocw.mit.edu 2.004 Dynamics and Control II Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Institute
Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform.
 Inversion of the z-transform Focus on rational z-transform of z 1. Apply partial fraction expansion. Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform. Let X(z)
Inversion of the z-transform Focus on rational z-transform of z 1. Apply partial fraction expansion. Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform. Let X(z)
6.869 Advances in Computer Vision. Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018
 6.869 Advances in Computer Vision Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018 1 Sampling Sampling Pixels Continuous world 3 Sampling 4 Sampling 5 Continuous image f (x, y) Sampling
6.869 Advances in Computer Vision Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018 1 Sampling Sampling Pixels Continuous world 3 Sampling 4 Sampling 5 Continuous image f (x, y) Sampling
Assignment 4 Solutions Continuous-Time Fourier Transform
 Assignment 4 Solutions Continuous-Time Fourier Transform ECE 3 Signals and Systems II Version 1.01 Spring 006 1. Properties of complex numbers. Let c 1 α 1 + jβ 1 and c α + jβ be two complex numbers. a.
Assignment 4 Solutions Continuous-Time Fourier Transform ECE 3 Signals and Systems II Version 1.01 Spring 006 1. Properties of complex numbers. Let c 1 α 1 + jβ 1 and c α + jβ be two complex numbers. a.
Statistical methods. Mean value and standard deviations Standard statistical distributions Linear systems Matrix algebra
 Statistical methods Mean value and standard deviations Standard statistical distributions Linear systems Matrix algebra Statistical methods Generating random numbers MATLAB has many built-in functions
Statistical methods Mean value and standard deviations Standard statistical distributions Linear systems Matrix algebra Statistical methods Generating random numbers MATLAB has many built-in functions
6.061 / Introduction to Electric Power Systems
 MIT OpenCourseWare http://ocw.mit.edu 6.61 / 6.69 Introduction to Electric Power Systems Spring 27 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
MIT OpenCourseWare http://ocw.mit.edu 6.61 / 6.69 Introduction to Electric Power Systems Spring 27 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
HW13 Solutions. Pr (a) The DTFT of c[n] is. C(e jω ) = 0.5 m e jωm e jω + 1
![HW13 Solutions. Pr (a) The DTFT of c[n] is. C(e jω ) = 0.5 m e jωm e jω + 1](/thumbs/79/79344884.jpg "HW13 Solutions. Pr (a) The DTFT of c[n] is. C(e jω ) = 0.5 m e jωm e jω + 1") HW3 Solutions Pr..8 (a) The DTFT of c[n] is C(e jω ) = = =.5 n e jωn + n=.5e jω + n= m=.5 n e jωn.5 m e jωm.5e jω +.5e jω.75 =.5 cos(ω) }{{}.5e jω /(.5e jω ) C(e jω ) is the power spectral density. (b)
HW3 Solutions Pr..8 (a) The DTFT of c[n] is C(e jω ) = = =.5 n e jωn + n=.5e jω + n= m=.5 n e jωn.5 m e jωm.5e jω +.5e jω.75 =.5 cos(ω) }{{}.5e jω /(.5e jω ) C(e jω ) is the power spectral density. (b)