AE/ME 339. K. M. Isaac Professor of Aerospace Engineering. December 21, 2001 topic13_grid_generation 1
|
|
|
- Samuel Mitchell
- 5 years ago
- Views:
Transcription
1 AE/ME 339 Professor of Aerospace Engineering December 21, 2001 topic13_grid_generation 1
2 The basic idea behind grid generation is the creation of the transformation laws between the phsical space and the computational space. These laws are known as the metrics of the transformation. We have alread performed a simple grid generation without realizing it for the flow over a heated wall when we used the, coordinates for the numerical scheme. This was simpl a transformation from one rectangular domain to another rectangular domain. December 21, 2001 topic13_grid_generation 2
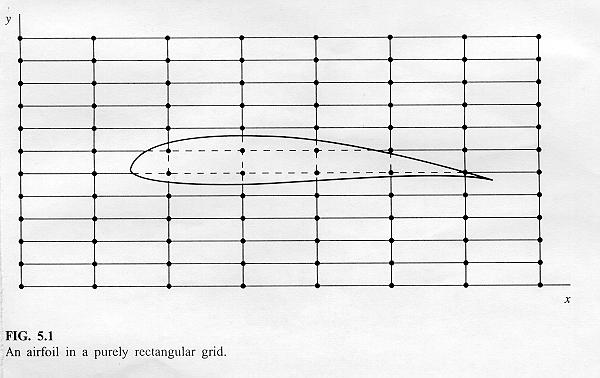
3 Grid Generation (Chapter 5) Qualit of the CFD solution is strongl dependent on the qualit of the grid. Wh is grid generation necessar? Figure 5.1(net slide)can be used to eplain. Note that the standard finite difference methods require a uniforml spaced rectangular grid. If a rectangular grid is used, few grid points fall on the surface. Flow close to the surface being ver important in terms of forces, heat transfer, etc., a rectangular grid will give poor results in such regions. Also uniform grid spacing often does not ield accurate solutions. Tpicall, the grid will be closel spaced in boundar laers. December 21, 2001 topic13_grid_generation 3
4 December 21, 2001 topic13_grid_generation 4

5 Figure shows a phsical flow domain that surrounds the bod and the corresponding rectangular flow domain. Note that if the airfoil is cut and the surface straightened out, it would form the -ais. Similarl, the outer boundar would become the top boundar of the computational domain. The left and right boundaries of the computational domain would represent the cut surface. Note the locations of points a, b, and c in the two figures. December 21, 2001 topic13_grid_generation 5
6 Note that in the phsical space the cells are not rectangular and the grid is uniforml spaced. There is a one-to-one correspondence between the phsical space and the computational space. Each point in the computational space represents a point in the phsical space. The procedure is as follows: 1. Establish the necessar transformation relations between the phsical space and the computational space 2. Transform the governing equations and the boundar conditions into the computational space. 3. Solve the equations in the computational space using the uniforml spaced rectangular grid. 4. Perform a reverse transformation to represent the flow properties in the phsical space. December 21, 2001 topic13_grid_generation 6
7 General Transformation Relations Consider a two-dimensional unstead flow with independent variables t,,. The variables in the computational domain are represented b, and The relations between the two sets of variables can be represented as follows. t...(5.1 c), t,...(5.1 a), t,...(5.1 b) December 21, 2001 topic13_grid_generation 7
8 The derivatives appearing in the governing equations must be transformed using the chain rule of differentiation., t,, t,, t,, t The subscripts are used to emphasize significance of the partial derivatives and the will not be included in the equations that follow. December 21, 2001 topic13_grid_generation 8
9 ...(5.2)...(5.3) t t t t,,,,,,,...(5.4)...(5.5) t t t t December 21, 2001 topic13_grid_generation 9
10 The first derivatives in the governing equations can be transformed using Eqs. (5.2), (5.3) and (5.5). The coefficients of the transformed derivatives such as the ones given below are known metrics.,,, Similarl, chain rule should be used to transform higher order derivatives. Eample: (5.9) December 21, 2001 topic13_grid_generation 10
11 Metrics and Jacobian (5.3) In CFD the metric terms are not often available as analtical epressions. Instead the are often represented numericall. The following inverse transformation is often more convenient to use than the original transformation,,...(5.18 a),,...(5.18 b) t t...(5.18 c) December 21, 2001 topic13_grid_generation 11
12 Let = (), = () and u = u(, ). then we can write u u du d d...(5.19) u u u...(5.21) u u u...(5.20) Eqs. (5.21) and (5.22) are two equations for the two unknown derivatives. December 21, 2001 topic13_grid_generation 12
13 Solving for the partial derivate w. r. t gives, using Cramer s rule u u u...(5.22) Define the Jacobian J as J,,...(5.22 a) Eq. (5.22) can now be written in terms of J. u 1 u u...(5.23 a) J December 21, 2001 topic13_grid_generation 13
14 Similarl we can write the derivative w.r.t as u 1 u u...(5.23 b) J and we can define the following 1 u...(5.24 a) J 1...(5.24 b) J December 21, 2001 topic13_grid_generation 14
15 The above equations can be easil etended to three space dimensions (, an z). The above equations can also be obtained formall as follows,...(5.25 a) d d d...(5.26 a),...(5.25 b) d d d...(5.26 b) d d...(5.27) d d December 21, 2001 topic13_grid_generation 15
16 Similarl,...(5.28 a),...(5.28 b) d d d...(5.29 a) d d d...(5.29 b) d d...(5.30) d d December 21, 2001 topic13_grid_generation 16
17 Eq. (5.30) can be solved for d, d 1 d d...(5.31) d d Consider the conservation form 2D flow with no source term U F G 0...(5.37) t December 21, 2001 topic13_grid_generation 17
18 1...(5.32) Using results from matri algebra for inversion of matrices, RHS can be written as follows...(5.33) December 21, 2001 topic13_grid_generation 18
19 Since the determinant of a matri and its transpose are the same we can write J...(5.34) Substitute Eq. (5.34) into Eq. (5.33) 1...(5.35) J December 21, 2001 topic13_grid_generation 19
20 Comparing corresponding elements of the two matrices on the LHS and the RHS gives the following relations. 1 J...(5.36 a) 1 J 1 J...(5.36 b)...(5.36 c) 1...(5.36 d) J December 21, 2001 topic13_grid_generation 20
21 Consider the conservation form 2D flow with no source term U F G 0...(5.37) t December 21, 2001 topic13_grid_generation 21
22 The above equation can be transformed to (see section 5.4) U1 F1 G1 0...(5.38) t Where the U1, F1, and G1 are as follows U1 JU...(5.48 a) F1 JF JG...(5.48 b) G1 JF JG...(5.48 c) December 21, 2001 topic13_grid_generation 22
23 Algebraic Methods Known functions are used to map irregular phsical domain into rectangular computational domains. December 21, 2001 topic13_grid_generation 23
 ln( 1)...(5.50 b) Inverse transformation...(5.51 a) ep( ) 1...(5.51 b) December 21, 2001 topic13_grid_generation 24")
24 Eample: Grid stretching ma be necessar for some problems such as flow with boundar laers. Let us consider the transformation:...(5.50 a) ln( 1)...(5.50 b) Inverse transformation...(5.51 a) ep( ) 1...(5.51 b) December 21, 2001 topic13_grid_generation 24
25 The following relation (Eq. 5.52) hold between increments and d d e d e d e...(5.52) December 21, 2001 topic13_grid_generation 25
26 December 21, 2001 topic13_grid_generation 26 Computational Fluid Dnamics (AE/ME 339) Therefore as increases, increases eponentiall. Thus we can choose constant and still have an eponential stretching of the grid in the -direction. 0...(5.53) ) ( ) ( ) ( ) ( v u 0...(554) ) ( ) ( ) ( ) ( v v u u (5.55)
27 December 21, 2001 topic13_grid_generation 27 Computational Fluid Dnamics (AE/ME 339) Substitute in Eq. (5.54) to get 0...(5.56) ) ( 1 1 ) ( v u 0...(5.57) ) ( 1 ) ( v e u 0 ) ( ) ( v u e Eq. (5.57) is the continuit equation in the computational domain. Thus we have transformed the continuit equation from the phsical space to the computational space.
28 The metrics carr the specifics of a particular transformation. Boundar Fitted Coordinate Sstem (5.7) Here we consider the flow through a divergent duct as given in Figure 5.6 (net slide). de is the curved upper wall and fg is the centerline. Let s = f() be the function that represents the upper wall. The following transformation will give rise to a rectangular grid. = (5.65) = /s (5.66) To test this choose s = 1.5 and let var from 1 to 5. At = 1, = 1, ma =ma/s = 1, and = 5, = 5, ma = ma/s = 1. Thus the irregular domain is transformed into into a rectangular domain. December 21, 2001 topic13_grid_generation 28
29 Consider a second case where the Nozzle wall is curved December 21, 2001 topic13_grid_generation 29
30 ma ma 1, December 21, 2001 topic13_grid_generation 30
31 December 21, 2001 topic13_grid_generation 31 Computational Fluid Dnamics (AE/ME 339) The above formulation is analtic,,, The Jacobian is defined as Could also be obtained using central differencing. J ), ( ), (
32 Consider a point in the domain where we have Let = 1.75, = 0.75 Let us calculate _ analticall and numericall. At this point: (1.75) , 0 December 21, 2001 topic13_grid_generation 32
33 We can also numericall calculate the derivatives using CD I J : ma ma 2 : I December 21, 2001 topic13_grid_generation 33
34 December 21, 2001 topic13_grid_generation 34
Fluid Mechanics II. Newton s second law applied to a control volume
 Fluid Mechanics II Stead flow momentum equation Newton s second law applied to a control volume Fluids, either in a static or dnamic motion state, impose forces on immersed bodies and confining boundaries.
Fluid Mechanics II Stead flow momentum equation Newton s second law applied to a control volume Fluids, either in a static or dnamic motion state, impose forces on immersed bodies and confining boundaries.
Particular Solutions
 Particular Solutions Our eamples so far in this section have involved some constant of integration, K. We now move on to see particular solutions, where we know some boundar conditions and we substitute
Particular Solutions Our eamples so far in this section have involved some constant of integration, K. We now move on to see particular solutions, where we know some boundar conditions and we substitute
1.3 LIMITS AT INFINITY; END BEHAVIOR OF A FUNCTION
 . Limits at Infinit; End Behavior of a Function 89. LIMITS AT INFINITY; END BEHAVIOR OF A FUNCTION Up to now we have been concerned with its that describe the behavior of a function f) as approaches some
. Limits at Infinit; End Behavior of a Function 89. LIMITS AT INFINITY; END BEHAVIOR OF A FUNCTION Up to now we have been concerned with its that describe the behavior of a function f) as approaches some
CONTINUOUS SPATIAL DATA ANALYSIS
 CONTINUOUS SPATIAL DATA ANALSIS 1. Overview of Spatial Stochastic Processes The ke difference between continuous spatial data and point patterns is that there is now assumed to be a meaningful value, s
CONTINUOUS SPATIAL DATA ANALSIS 1. Overview of Spatial Stochastic Processes The ke difference between continuous spatial data and point patterns is that there is now assumed to be a meaningful value, s
5.3.3 The general solution for plane waves incident on a layered halfspace. The general solution to the Helmholz equation in rectangular coordinates
 5.3.3 The general solution for plane waves incident on a laered halfspace The general solution to the elmhol equation in rectangular coordinates The vector propagation constant Vector relationships between
5.3.3 The general solution for plane waves incident on a laered halfspace The general solution to the elmhol equation in rectangular coordinates The vector propagation constant Vector relationships between
Boundary-Fitted Coordinates!
 Computational Fluid Dnamics http:wwwndedu~gtrggvacfdcourse Computational Fluid Dnamics Computational Methods or Domains with Comple BoundariesI Grétar Trggvason Spring For most engineering problems it
Computational Fluid Dnamics http:wwwndedu~gtrggvacfdcourse Computational Fluid Dnamics Computational Methods or Domains with Comple BoundariesI Grétar Trggvason Spring For most engineering problems it
Multiple Integration
 Contents 7 Multiple Integration 7. Introduction to Surface Integrals 7. Multiple Integrals over Non-rectangular Regions 7. Volume Integrals 4 7.4 Changing Coordinates 66 Learning outcomes In this Workbook
Contents 7 Multiple Integration 7. Introduction to Surface Integrals 7. Multiple Integrals over Non-rectangular Regions 7. Volume Integrals 4 7.4 Changing Coordinates 66 Learning outcomes In this Workbook
CHAPTER 2: Partial Derivatives. 2.2 Increments and Differential
 CHAPTER : Partial Derivatives.1 Definition of a Partial Derivative. Increments and Differential.3 Chain Rules.4 Local Etrema.5 Absolute Etrema 1 Chapter : Partial Derivatives.1 Definition of a Partial
CHAPTER : Partial Derivatives.1 Definition of a Partial Derivative. Increments and Differential.3 Chain Rules.4 Local Etrema.5 Absolute Etrema 1 Chapter : Partial Derivatives.1 Definition of a Partial
Finding Limits Graphically and Numerically. An Introduction to Limits
 60_00.qd //0 :05 PM Page 8 8 CHAPTER Limits and Their Properties Section. Finding Limits Graphicall and Numericall Estimate a it using a numerical or graphical approach. Learn different was that a it can
60_00.qd //0 :05 PM Page 8 8 CHAPTER Limits and Their Properties Section. Finding Limits Graphicall and Numericall Estimate a it using a numerical or graphical approach. Learn different was that a it can
1.3. Absolute Value and Piecewise-Defined Functions Absolutely Piece-ful. My Notes ACTIVITY
 Absolute Value and Piecewise-Defined Functions Absolutel Piece-ful SUGGESTED LEARNING STRATEGIES: Activating Prior Knowledge, Create Representations, Quickwrite. Graph both = - for < 3 and = - + 7 for
Absolute Value and Piecewise-Defined Functions Absolutel Piece-ful SUGGESTED LEARNING STRATEGIES: Activating Prior Knowledge, Create Representations, Quickwrite. Graph both = - for < 3 and = - + 7 for
Finding Limits Graphically and Numerically. An Introduction to Limits
 8 CHAPTER Limits and Their Properties Section Finding Limits Graphicall and Numericall Estimate a it using a numerical or graphical approach Learn different was that a it can fail to eist Stud and use
8 CHAPTER Limits and Their Properties Section Finding Limits Graphicall and Numericall Estimate a it using a numerical or graphical approach Learn different was that a it can fail to eist Stud and use
Conservation of Linear Momentum for a Differential Control Volume
 Conservation of Linear Momentum for a Differential Control Volume When we applied the rate-form of the conservation of mass equation to a differential control volume (open sstem in Cartesian coordinates,
Conservation of Linear Momentum for a Differential Control Volume When we applied the rate-form of the conservation of mass equation to a differential control volume (open sstem in Cartesian coordinates,
Computational Methods for Domains with! Complex Boundaries-I!
 http://www.nd.edu/~gtrggva/cfd-course/ Computational Methods or Domains with Comple Boundaries-I Grétar Trggvason Spring For most engineering problems it is necessar to deal with comple geometries, consisting
http://www.nd.edu/~gtrggva/cfd-course/ Computational Methods or Domains with Comple Boundaries-I Grétar Trggvason Spring For most engineering problems it is necessar to deal with comple geometries, consisting
Conservation of Linear Momentum
 Conservation of Linear Momentum Once we have determined the continuit equation in di erential form we proceed to derive the momentum equation in di erential form. We start b writing the integral form of
Conservation of Linear Momentum Once we have determined the continuit equation in di erential form we proceed to derive the momentum equation in di erential form. We start b writing the integral form of
FACULTY OF MATHEMATICAL STUDIES MATHEMATICS FOR PART I ENGINEERING. Lectures AB = BA = I,
 FACULTY OF MATHEMATICAL STUDIES MATHEMATICS FOR PART I ENGINEERING Lectures MODULE 7 MATRICES II Inverse of a matri Sstems of linear equations Solution of sets of linear equations elimination methods 4
FACULTY OF MATHEMATICAL STUDIES MATHEMATICS FOR PART I ENGINEERING Lectures MODULE 7 MATRICES II Inverse of a matri Sstems of linear equations Solution of sets of linear equations elimination methods 4
Lecture 4.2 Finite Difference Approximation
 Lecture 4. Finite Difference Approimation 1 Discretization As stated in Lecture 1.0, there are three steps in numerically solving the differential equations. They are: 1. Discretization of the domain by
Lecture 4. Finite Difference Approimation 1 Discretization As stated in Lecture 1.0, there are three steps in numerically solving the differential equations. They are: 1. Discretization of the domain by
MMJ1153 COMPUTATIONAL METHOD IN SOLID MECHANICS PRELIMINARIES TO FEM
 B Course Content: A INTRODUCTION AND OVERVIEW Numerical method and Computer-Aided Engineering; Phsical problems; Mathematical models; Finite element method;. B Elements and nodes, natural coordinates,
B Course Content: A INTRODUCTION AND OVERVIEW Numerical method and Computer-Aided Engineering; Phsical problems; Mathematical models; Finite element method;. B Elements and nodes, natural coordinates,
Applications of Gauss-Radau and Gauss-Lobatto Numerical Integrations Over a Four Node Quadrilateral Finite Element
 Avaiable online at www.banglaol.info angladesh J. Sci. Ind. Res. (), 77-86, 008 ANGLADESH JOURNAL OF SCIENTIFIC AND INDUSTRIAL RESEARCH CSIR E-mail: bsir07gmail.com Abstract Applications of Gauss-Radau
Avaiable online at www.banglaol.info angladesh J. Sci. Ind. Res. (), 77-86, 008 ANGLADESH JOURNAL OF SCIENTIFIC AND INDUSTRIAL RESEARCH CSIR E-mail: bsir07gmail.com Abstract Applications of Gauss-Radau
1.1 The Equations of Motion
 1.1 The Equations of Motion In Book I, balance of forces and moments acting on an component was enforced in order to ensure that the component was in equilibrium. Here, allowance is made for stresses which
1.1 The Equations of Motion In Book I, balance of forces and moments acting on an component was enforced in order to ensure that the component was in equilibrium. Here, allowance is made for stresses which
Consideration of Shock Waves in Airbag Deployment Simulations
 Consideration of Shock Waves in Airbag Deploment Simulations Doris Rieger BMW Group ABSTRACT When the inflation process of a simple flat airbag was simulated with the MADYMO gas flow module, the resulting
Consideration of Shock Waves in Airbag Deploment Simulations Doris Rieger BMW Group ABSTRACT When the inflation process of a simple flat airbag was simulated with the MADYMO gas flow module, the resulting
LESSON #48 - INTEGER EXPONENTS COMMON CORE ALGEBRA II
 LESSON #8 - INTEGER EXPONENTS COMMON CORE ALGEBRA II We just finished our review of linear functions. Linear functions are those that grow b equal differences for equal intervals. In this unit we will
LESSON #8 - INTEGER EXPONENTS COMMON CORE ALGEBRA II We just finished our review of linear functions. Linear functions are those that grow b equal differences for equal intervals. In this unit we will
Determinants. We said in Section 3.3 that a 2 2 matrix a b. Determinant of an n n Matrix
 3.6 Determinants We said in Section 3.3 that a 2 2 matri a b is invertible if and onl if its c d erminant, ad bc, is nonzero, and we saw the erminant used in the formula for the inverse of a 2 2 matri.
3.6 Determinants We said in Section 3.3 that a 2 2 matri a b is invertible if and onl if its c d erminant, ad bc, is nonzero, and we saw the erminant used in the formula for the inverse of a 2 2 matri.
Velocity Limit in DPD Simulations of Wall-Bounded Flows
 Velocit Limit in DPD Simulations of Wall-Bounded Flows Dmitr A. Fedosov, Igor V. Pivkin and George Em Karniadakis Division of Applied Mathematics, Brown Universit, Providence, RI 2912 USA Abstract Dissipative
Velocit Limit in DPD Simulations of Wall-Bounded Flows Dmitr A. Fedosov, Igor V. Pivkin and George Em Karniadakis Division of Applied Mathematics, Brown Universit, Providence, RI 2912 USA Abstract Dissipative
1.6 CONTINUITY OF TRIGONOMETRIC, EXPONENTIAL, AND INVERSE FUNCTIONS
 .6 Continuit of Trigonometric, Eponential, and Inverse Functions.6 CONTINUITY OF TRIGONOMETRIC, EXPONENTIAL, AND INVERSE FUNCTIONS In this section we will discuss the continuit properties of trigonometric
.6 Continuit of Trigonometric, Eponential, and Inverse Functions.6 CONTINUITY OF TRIGONOMETRIC, EXPONENTIAL, AND INVERSE FUNCTIONS In this section we will discuss the continuit properties of trigonometric
6.4 graphs OF logarithmic FUnCTIOnS
 SECTION 6. graphs of logarithmic functions 9 9 learning ObjeCTIveS In this section, ou will: Identif the domain of a logarithmic function. Graph logarithmic functions. 6. graphs OF logarithmic FUnCTIOnS
SECTION 6. graphs of logarithmic functions 9 9 learning ObjeCTIveS In this section, ou will: Identif the domain of a logarithmic function. Graph logarithmic functions. 6. graphs OF logarithmic FUnCTIOnS
Two conventions for coordinate systems. Left-Hand vs Right-Hand. x z. Which is which?
 walters@buffalo.edu CSE 480/580 Lecture 2 Slide 3-D Transformations 3-D space Two conventions for coordinate sstems Left-Hand vs Right-Hand (Thumb is the ais, inde is the ais) Which is which? Most graphics
walters@buffalo.edu CSE 480/580 Lecture 2 Slide 3-D Transformations 3-D space Two conventions for coordinate sstems Left-Hand vs Right-Hand (Thumb is the ais, inde is the ais) Which is which? Most graphics
9.2. Cartesian Components of Vectors. Introduction. Prerequisites. Learning Outcomes
 Cartesian Components of Vectors 9.2 Introduction It is useful to be able to describe vectors with reference to specific coordinate sstems, such as the Cartesian coordinate sstem. So, in this Section, we
Cartesian Components of Vectors 9.2 Introduction It is useful to be able to describe vectors with reference to specific coordinate sstems, such as the Cartesian coordinate sstem. So, in this Section, we
520 Chapter 9. Nonlinear Differential Equations and Stability. dt =
 5 Chapter 9. Nonlinear Differential Equations and Stabilit dt L dθ. g cos θ cos α Wh was the negative square root chosen in the last equation? (b) If T is the natural period of oscillation, derive the
5 Chapter 9. Nonlinear Differential Equations and Stabilit dt L dθ. g cos θ cos α Wh was the negative square root chosen in the last equation? (b) If T is the natural period of oscillation, derive the
Unit 10 - Graphing Quadratic Functions
 Unit - Graphing Quadratic Functions PREREQUISITE SKILLS: students should be able to add, subtract and multipl polnomials students should be able to factor polnomials students should be able to identif
Unit - Graphing Quadratic Functions PREREQUISITE SKILLS: students should be able to add, subtract and multipl polnomials students should be able to factor polnomials students should be able to identif
KINEMATIC RELATIONS IN DEFORMATION OF SOLIDS
 Chapter 8 KINEMATIC RELATIONS IN DEFORMATION OF SOLIDS Figure 8.1: 195 196 CHAPTER 8. KINEMATIC RELATIONS IN DEFORMATION OF SOLIDS 8.1 Motivation In Chapter 3, the conservation of linear momentum for a
Chapter 8 KINEMATIC RELATIONS IN DEFORMATION OF SOLIDS Figure 8.1: 195 196 CHAPTER 8. KINEMATIC RELATIONS IN DEFORMATION OF SOLIDS 8.1 Motivation In Chapter 3, the conservation of linear momentum for a
Chapter 6 2D Elements Plate Elements
 Institute of Structural Engineering Page 1 Chapter 6 2D Elements Plate Elements Method of Finite Elements I Institute of Structural Engineering Page 2 Continuum Elements Plane Stress Plane Strain Toda
Institute of Structural Engineering Page 1 Chapter 6 2D Elements Plate Elements Method of Finite Elements I Institute of Structural Engineering Page 2 Continuum Elements Plane Stress Plane Strain Toda
The Control-Volume Finite-Difference Approximation to the Diffusion Equation
 The Control-Volume Finite-Difference Approimation to the Diffusion Equation ME 448/548 Notes Gerald Recktenwald Portland State Universit Department of Mechanical Engineering gerr@mepdedu ME 448/548: D
The Control-Volume Finite-Difference Approimation to the Diffusion Equation ME 448/548 Notes Gerald Recktenwald Portland State Universit Department of Mechanical Engineering gerr@mepdedu ME 448/548: D
THE HEATED LAMINAR VERTICAL JET IN A LIQUID WITH POWER-LAW TEMPERATURE DEPENDENCE OF DENSITY. V. A. Sharifulin.
 THE HEATED LAMINAR VERTICAL JET IN A LIQUID WITH POWER-LAW TEMPERATURE DEPENDENCE OF DENSITY 1. Introduction V. A. Sharifulin Perm State Technical Universit, Perm, Russia e-mail: sharifulin@perm.ru Water
THE HEATED LAMINAR VERTICAL JET IN A LIQUID WITH POWER-LAW TEMPERATURE DEPENDENCE OF DENSITY 1. Introduction V. A. Sharifulin Perm State Technical Universit, Perm, Russia e-mail: sharifulin@perm.ru Water
APPLIED MECHANICS I Resultant of Concurrent Forces Consider a body acted upon by co-planar forces as shown in Fig 1.1(a).
.") PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
4.317 d 4 y. 4 dx d 2 y dy. 20. dt d 2 x. 21. y 3y 3y y y 6y 12y 8y y (4) y y y (4) 2y y 0. d 4 y 26.
 y y y (4) 2y y 0. d 4 y 26.") 38 CHAPTER 4 HIGHER-ORDER DIFFERENTIAL EQUATIONS sstems are also able, b means of their dsolve commands, to provide eplicit solutions of homogeneous linear constant-coefficient differential equations.
38 CHAPTER 4 HIGHER-ORDER DIFFERENTIAL EQUATIONS sstems are also able, b means of their dsolve commands, to provide eplicit solutions of homogeneous linear constant-coefficient differential equations.
Topic02_PDE. 8/29/2006 topic02_pde 1. Computational Fluid Dynamics (AE/ME 339) MAE Dept., UMR
 MAE Dept., UMR") MEAE 9 Computational Fluid Dnamics Topic0_ 89006 topic0_ Partial Dierential Equations () (CLW: 7., 7., 7.4) s can be linear or nonlinear Order : Determined b the order o the highest derivative. Linear,
MEAE 9 Computational Fluid Dnamics Topic0_ 89006 topic0_ Partial Dierential Equations () (CLW: 7., 7., 7.4) s can be linear or nonlinear Order : Determined b the order o the highest derivative. Linear,
Large Eddy Simulation of the flow and heat transfer in a half-corrugated channel with various wave amplitudes
 Int. J Heat Mass Transfer, Vol. 76 pp. 432-446, 214 Large Edd Simulation of the flow and heat transfer in a half-corrugated channel with various wave amplitudes Maram Mirzaei, Ahmad Sohankar, Lars Davidson,
Int. J Heat Mass Transfer, Vol. 76 pp. 432-446, 214 Large Edd Simulation of the flow and heat transfer in a half-corrugated channel with various wave amplitudes Maram Mirzaei, Ahmad Sohankar, Lars Davidson,
Applications of Proper Orthogonal Decomposition for Inviscid Transonic Aerodynamics
 Applications of Proper Orthogonal Decomposition for Inviscid Transonic Aerodnamics Bui-Thanh Tan, Karen Willco and Murali Damodaran Abstract Two etensions to the proper orthogonal decomposition (POD) technique
Applications of Proper Orthogonal Decomposition for Inviscid Transonic Aerodnamics Bui-Thanh Tan, Karen Willco and Murali Damodaran Abstract Two etensions to the proper orthogonal decomposition (POD) technique
ESCI 485 Air/sea Interaction Lesson 5 Oceanic Boundary Layer
 ESCI 485 Air/sea Interaction Lesson 5 Oceanic Boundar Laer References: Descriptive Phsical Oceanograph, Pickard and Emer Introductor Dnamical Oceanograph, Pond and Pickard Principles of Ocean Phsics, Apel
ESCI 485 Air/sea Interaction Lesson 5 Oceanic Boundar Laer References: Descriptive Phsical Oceanograph, Pickard and Emer Introductor Dnamical Oceanograph, Pond and Pickard Principles of Ocean Phsics, Apel
4 Strain true strain engineering strain plane strain strain transformation formulae
 4 Strain The concept of strain is introduced in this Chapter. The approimation to the true strain of the engineering strain is discussed. The practical case of two dimensional plane strain is discussed,
4 Strain The concept of strain is introduced in this Chapter. The approimation to the true strain of the engineering strain is discussed. The practical case of two dimensional plane strain is discussed,
Numerical Solution of Non-Darcian Effects on Natural Convection in a Rectangular Porous Enclosure with Heated Walls
 International Journal of Advanced Mechanical Engineering. ISSN 2250-3234 Volume 8, Number 1 (18), pp. 71-86 Research India Publications http://www.ripublication.com Numerical Solution of Non-Darcian Effects
International Journal of Advanced Mechanical Engineering. ISSN 2250-3234 Volume 8, Number 1 (18), pp. 71-86 Research India Publications http://www.ripublication.com Numerical Solution of Non-Darcian Effects
INTRODUCTION TO DIFFERENTIAL EQUATIONS
 INTRODUCTION TO DIFFERENTIAL EQUATIONS. Definitions and Terminolog. Initial-Value Problems.3 Differential Equations as Mathematical Models CHAPTER IN REVIEW The words differential and equations certainl
INTRODUCTION TO DIFFERENTIAL EQUATIONS. Definitions and Terminolog. Initial-Value Problems.3 Differential Equations as Mathematical Models CHAPTER IN REVIEW The words differential and equations certainl
UNCORRECTED. To recognise the rules of a number of common algebraic relations: y = x 1 y 2 = x
 5A galler of graphs Objectives To recognise the rules of a number of common algebraic relations: = = = (rectangular hperbola) + = (circle). To be able to sketch the graphs of these relations. To be able
5A galler of graphs Objectives To recognise the rules of a number of common algebraic relations: = = = (rectangular hperbola) + = (circle). To be able to sketch the graphs of these relations. To be able
Jones & Bartlett Learning, LLC NOT FOR SALE OR DISTRIBUTION. Jones & Bartlett Learning, LLC NOT FOR SALE OR DISTRIBUTION
 FIRST-ORDER DIFFERENTIAL EQUATIONS 2 Chapter Contents 2. Solution Curves without a Solution 2.. Direction Fields 2..2 Jones Autonomous & Bartlett First-Order Learning, DEs LLC 2.2 Separable Equations 2.3
FIRST-ORDER DIFFERENTIAL EQUATIONS 2 Chapter Contents 2. Solution Curves without a Solution 2.. Direction Fields 2..2 Jones Autonomous & Bartlett First-Order Learning, DEs LLC 2.2 Separable Equations 2.3
8.7 Systems of Non-Linear Equations and Inequalities
 8.7 Sstems of Non-Linear Equations and Inequalities 67 8.7 Sstems of Non-Linear Equations and Inequalities In this section, we stud sstems of non-linear equations and inequalities. Unlike the sstems of
8.7 Sstems of Non-Linear Equations and Inequalities 67 8.7 Sstems of Non-Linear Equations and Inequalities In this section, we stud sstems of non-linear equations and inequalities. Unlike the sstems of
Roberto s Notes on Differential Calculus Chapter 4: Basic differentiation rules Section 4. The chain rule
 Roberto s Notes on Differential Calculus Chapter 4: Basic differentiation rules Section 4 The chain rule What you need to know already: The concept and definition of derivative, basic differentiation rules.
Roberto s Notes on Differential Calculus Chapter 4: Basic differentiation rules Section 4 The chain rule What you need to know already: The concept and definition of derivative, basic differentiation rules.
Introduction to Differential Equations. National Chiao Tung University Chun-Jen Tsai 9/14/2011
 Introduction to Differential Equations National Chiao Tung Universit Chun-Jen Tsai 9/14/011 Differential Equations Definition: An equation containing the derivatives of one or more dependent variables,
Introduction to Differential Equations National Chiao Tung Universit Chun-Jen Tsai 9/14/011 Differential Equations Definition: An equation containing the derivatives of one or more dependent variables,
y R T However, the calculations are easier, when carried out using the polar set of co-ordinates ϕ,r. The relations between the co-ordinates are:
 Curved beams. Introduction Curved beams also called arches were invented about ears ago. he purpose was to form such a structure that would transfer loads, mainl the dead weight, to the ground b the elements
Curved beams. Introduction Curved beams also called arches were invented about ears ago. he purpose was to form such a structure that would transfer loads, mainl the dead weight, to the ground b the elements
3.1 Exponential Functions and Their Graphs
 .1 Eponential Functions and Their Graphs Sllabus Objective: 9.1 The student will sketch the graph of a eponential, logistic, or logarithmic function. 9. The student will evaluate eponential or logarithmic
.1 Eponential Functions and Their Graphs Sllabus Objective: 9.1 The student will sketch the graph of a eponential, logistic, or logarithmic function. 9. The student will evaluate eponential or logarithmic
Chapter 2 Basic Conservation Equations for Laminar Convection
 Chapter Basic Conservation Equations for Laminar Convection Abstract In this chapter, the basic conservation equations related to laminar fluid flow conservation equations are introduced. On this basis,
Chapter Basic Conservation Equations for Laminar Convection Abstract In this chapter, the basic conservation equations related to laminar fluid flow conservation equations are introduced. On this basis,
σ = F/A. (1.2) σ xy σ yy σ zy , (1.3) σ xz σ yz σ zz The use of the opposite convention should cause no problem because σ ij = σ ji.
 σ xy σ yy σ zy , (1.3) σ xz σ yz σ zz The use of the opposite convention should cause no problem because σ ij = σ ji.") Cambridge Universit Press 978-0-521-88121-0 - Metal Forming: Mechanics Metallurg, Third Edition Ecerpt 1 Stress Strain An understing of stress strain is essential for analzing metal forming operations.
Cambridge Universit Press 978-0-521-88121-0 - Metal Forming: Mechanics Metallurg, Third Edition Ecerpt 1 Stress Strain An understing of stress strain is essential for analzing metal forming operations.
Cubic and quartic functions
 3 Cubic and quartic functions 3A Epanding 3B Long division of polnomials 3C Polnomial values 3D The remainder and factor theorems 3E Factorising polnomials 3F Sum and difference of two cubes 3G Solving
3 Cubic and quartic functions 3A Epanding 3B Long division of polnomials 3C Polnomial values 3D The remainder and factor theorems 3E Factorising polnomials 3F Sum and difference of two cubes 3G Solving
σ = F/A. (1.2) σ xy σ yy σ zx σ xz σ yz σ, (1.3) The use of the opposite convention should cause no problem because σ ij = σ ji.
 σ xy σ yy σ zx σ xz σ yz σ, (1.3) The use of the opposite convention should cause no problem because σ ij = σ ji.") Cambridge Universit Press 978-1-107-00452-8 - Metal Forming: Mechanics Metallurg, Fourth Edition Ecerpt 1 Stress Strain An understing of stress strain is essential for the analsis of metal forming operations.
Cambridge Universit Press 978-1-107-00452-8 - Metal Forming: Mechanics Metallurg, Fourth Edition Ecerpt 1 Stress Strain An understing of stress strain is essential for the analsis of metal forming operations.
Consider a slender rod, fixed at one end and stretched, as illustrated in Fig ; the original position of the rod is shown dotted.
 4.1 Strain If an object is placed on a table and then the table is moved, each material particle moves in space. The particles undergo a displacement. The particles have moved in space as a rigid bod.
4.1 Strain If an object is placed on a table and then the table is moved, each material particle moves in space. The particles undergo a displacement. The particles have moved in space as a rigid bod.
Separation of Variables in Cartesian Coordinates
 Lecture 9 Separation of Variables in Cartesian Coordinates Phs 3750 Overview and Motivation: Toda we begin a more in-depth loo at the 3D wave euation. We introduce a techniue for finding solutions to partial
Lecture 9 Separation of Variables in Cartesian Coordinates Phs 3750 Overview and Motivation: Toda we begin a more in-depth loo at the 3D wave euation. We introduce a techniue for finding solutions to partial
Lecture 5: Rules of Differentiation. First Order Derivatives
 Lecture 5: Rules of Differentiation First order derivatives Higher order derivatives Partial differentiation Higher order partials Differentials Derivatives of implicit functions Generalized implicit function
Lecture 5: Rules of Differentiation First order derivatives Higher order derivatives Partial differentiation Higher order partials Differentials Derivatives of implicit functions Generalized implicit function
A NOVEL METHOD OF INTERPOLATION AND EXTRAPOLATION OF FUNCTIONS BY A LINEAR INITIAL VALUE PROBLEM
 A OVEL METHOD OF ITERPOLATIO AD EXTRAPOLATIO OF FUCTIOS BY A LIEAR IITIAL VALUE PROBLEM Michael Shatalov Sensor Science and Technolog o CSIR Manuacturing and Materials, P.O.Bo 395, Pretoria, CSIR and Department
A OVEL METHOD OF ITERPOLATIO AD EXTRAPOLATIO OF FUCTIOS BY A LIEAR IITIAL VALUE PROBLEM Michael Shatalov Sensor Science and Technolog o CSIR Manuacturing and Materials, P.O.Bo 395, Pretoria, CSIR and Department
Linear and Angular Velocities 2/4. Instructor: Jacob Rosen Advanced Robotic - MAE 263D - Department of Mechanical & Aerospace Engineering - UCLA
 Linear and ngular elocities 2/4 Instructor: Jacob osen dvanced obotic - ME 263D - Department of Mechanical & erospace Engineering - UL Jacobian Matri - alculation Methods Differentiation the Forward Kinematics
Linear and ngular elocities 2/4 Instructor: Jacob osen dvanced obotic - ME 263D - Department of Mechanical & erospace Engineering - UL Jacobian Matri - alculation Methods Differentiation the Forward Kinematics
220A Solutions. Assignment 5.
 4-40. Draw the free-bod diagram. 220A Solutions Assignment 5. - cos sin here are two stumbling points. he first is to resist the temptation to draw a force pointing down the inclined plane. he onl forces
4-40. Draw the free-bod diagram. 220A Solutions Assignment 5. - cos sin here are two stumbling points. he first is to resist the temptation to draw a force pointing down the inclined plane. he onl forces
First Order Equations
 10 1 Linear and Semilinear Equations Chapter First Order Equations Contents 1 Linear and Semilinear Equations 9 Quasilinear Equations 19 3 Wave Equation 6 4 Sstems of Equations 31 1 Linear and Semilinear
10 1 Linear and Semilinear Equations Chapter First Order Equations Contents 1 Linear and Semilinear Equations 9 Quasilinear Equations 19 3 Wave Equation 6 4 Sstems of Equations 31 1 Linear and Semilinear
The Chain Rule. This is a generalization of the (general) power rule which we have already met in the form: then f (x) = r [g(x)] r 1 g (x).
![The Chain Rule. This is a generalization of the (general) power rule which we have already met in the form: then f (x) = r [g(x)] r 1 g (x).](/thumbs/78/77820746.jpg "The Chain Rule. This is a generalization of the (general) power rule which we have already met in the form: then f (x) = r [g(x)] r 1 g (x).") The Chain Rule This is a generalization of the general) power rule which we have already met in the form: If f) = g)] r then f ) = r g)] r g ). Here, g) is any differentiable function and r is any real
The Chain Rule This is a generalization of the general) power rule which we have already met in the form: If f) = g)] r then f ) = r g)] r g ). Here, g) is any differentiable function and r is any real
Part D. Complex Analysis
 Part D. Comple Analsis Chapter 3. Comple Numbers and Functions. Man engineering problems ma be treated and solved b using comple numbers and comple functions. First, comple numbers and the comple plane
Part D. Comple Analsis Chapter 3. Comple Numbers and Functions. Man engineering problems ma be treated and solved b using comple numbers and comple functions. First, comple numbers and the comple plane
x y plane is the plane in which the stresses act, yy xy xy Figure 3.5.1: non-zero stress components acting in the x y plane
 3.5 Plane Stress This section is concerned with a special two-dimensional state of stress called plane stress. It is important for two reasons: () it arises in real components (particularl in thin components
3.5 Plane Stress This section is concerned with a special two-dimensional state of stress called plane stress. It is important for two reasons: () it arises in real components (particularl in thin components
3.3 Logarithmic Functions and Their Graphs
 274 CHAPTER 3 Eponential, Logistic, and Logarithmic Functions What ou ll learn about Inverses of Eponential Functions Common Logarithms Base 0 Natural Logarithms Base e Graphs of Logarithmic Functions
274 CHAPTER 3 Eponential, Logistic, and Logarithmic Functions What ou ll learn about Inverses of Eponential Functions Common Logarithms Base 0 Natural Logarithms Base e Graphs of Logarithmic Functions
2.3 Rectangular Components in Three-Dimensional Force Systems
 2.3 Rectangular Components in Three-Dimensional Force Sstems 2.3 Rectangular Components in Three-Dimensional Force Sstems Eample 1, page 1 of 2 1. Epress the force F in terms of,, and components. F = 200
2.3 Rectangular Components in Three-Dimensional Force Sstems 2.3 Rectangular Components in Three-Dimensional Force Sstems Eample 1, page 1 of 2 1. Epress the force F in terms of,, and components. F = 200
Jones & Bartlett Learning, LLC, an Ascend Learning Company. NOT FOR SALE OR DISTRIBUTION
 stefanel/shutterstock, Inc. CHAPTER 2 First-Order Differential Equations We begin our stu of differential equations with first-order equations. In this chapter we illustrate the three different was differential
stefanel/shutterstock, Inc. CHAPTER 2 First-Order Differential Equations We begin our stu of differential equations with first-order equations. In this chapter we illustrate the three different was differential
Matrices and Determinants
 Math Assignment Eperts is a leading provider of online Math help. Our eperts have prepared sample assignments to demonstrate the quality of solution we provide. If you are looking for mathematics help
Math Assignment Eperts is a leading provider of online Math help. Our eperts have prepared sample assignments to demonstrate the quality of solution we provide. If you are looking for mathematics help
Mathematics 309 Conic sections and their applicationsn. Chapter 2. Quadric figures. ai,j x i x j + b i x i + c =0. 1. Coordinate changes
 Mathematics 309 Conic sections and their applicationsn Chapter 2. Quadric figures In this chapter want to outline quickl how to decide what figure associated in 2D and 3D to quadratic equations look like.
Mathematics 309 Conic sections and their applicationsn Chapter 2. Quadric figures In this chapter want to outline quickl how to decide what figure associated in 2D and 3D to quadratic equations look like.
STATICS. Moments of Inertia VECTOR MECHANICS FOR ENGINEERS: Seventh Edition CHAPTER. Ferdinand P. Beer
 00 The McGraw-Hill Companies, nc. All rights reserved. Seventh E CHAPTER VECTOR MECHANCS FOR ENGNEERS: 9 STATCS Ferdinand P. Beer E. Russell Johnston, Jr. Distributed Forces: Lecture Notes: J. Walt Oler
00 The McGraw-Hill Companies, nc. All rights reserved. Seventh E CHAPTER VECTOR MECHANCS FOR ENGNEERS: 9 STATCS Ferdinand P. Beer E. Russell Johnston, Jr. Distributed Forces: Lecture Notes: J. Walt Oler
FIRST- AND SECOND-ORDER IVPS The problem given in (1) is also called an nth-order initial-value problem. For example, Solve: Solve:
 is also called an nth-order initial-value problem. For example, Solve: Solve:") .2 INITIAL-VALUE PROBLEMS 3.2 INITIAL-VALUE PROBLEMS REVIEW MATERIAL Normal form of a DE Solution of a DE Famil of solutions INTRODUCTION We are often interested in problems in which we seek a solution
.2 INITIAL-VALUE PROBLEMS 3.2 INITIAL-VALUE PROBLEMS REVIEW MATERIAL Normal form of a DE Solution of a DE Famil of solutions INTRODUCTION We are often interested in problems in which we seek a solution
2.2 SEPARABLE VARIABLES
 44 CHAPTER FIRST-ORDER DIFFERENTIAL EQUATIONS 6 Consider the autonomous DE 6 Use our ideas from Problem 5 to find intervals on the -ais for which solution curves are concave up and intervals for which
44 CHAPTER FIRST-ORDER DIFFERENTIAL EQUATIONS 6 Consider the autonomous DE 6 Use our ideas from Problem 5 to find intervals on the -ais for which solution curves are concave up and intervals for which
Ordinary Differential Equations
 58229_CH0_00_03.indd Page 6/6/6 2:48 PM F-007 /202/JB0027/work/indd & Bartlett Learning LLC, an Ascend Learning Compan.. PART Ordinar Differential Equations. Introduction to Differential Equations 2. First-Order
58229_CH0_00_03.indd Page 6/6/6 2:48 PM F-007 /202/JB0027/work/indd & Bartlett Learning LLC, an Ascend Learning Compan.. PART Ordinar Differential Equations. Introduction to Differential Equations 2. First-Order
Linear differential equation Expansion at irregular singular point
 Linear differential equation Epansion at irregular singular point Epansion around 0 for y'' 1 y 0. Eample in Bender & Orszag Section.4. Initial change of variable y e s If we replace y by e s : y[_]:=ep[s[]]
Linear differential equation Epansion at irregular singular point Epansion around 0 for y'' 1 y 0. Eample in Bender & Orszag Section.4. Initial change of variable y e s If we replace y by e s : y[_]:=ep[s[]]
f 0 ab a b: base f
 Precalculus Notes: Unit Eponential and Logarithmic Functions Sllabus Objective: 9. The student will sketch the graph of a eponential, logistic, or logarithmic function. 9. The student will evaluate eponential
Precalculus Notes: Unit Eponential and Logarithmic Functions Sllabus Objective: 9. The student will sketch the graph of a eponential, logistic, or logarithmic function. 9. The student will evaluate eponential
NATIONAL UNIVERSITY OF SINGAPORE Department of Mathematics MA4247 Complex Analysis II Lecture Notes Part I
 NATIONAL UNIVERSITY OF SINGAPORE Department of Mathematics MA4247 Comple Analsis II Lecture Notes Part I Chapter 1 Preliminar results/review of Comple Analsis I These are more detailed notes for the results
NATIONAL UNIVERSITY OF SINGAPORE Department of Mathematics MA4247 Comple Analsis II Lecture Notes Part I Chapter 1 Preliminar results/review of Comple Analsis I These are more detailed notes for the results
Normalization and Zero-Point Energy The amplitude A 2 in Eq can be found from the normalizing equation, 1106 CHAPTER 39 MORE ABOUT MATTER WAVES
 116 CHAPTER 39 MORE ABOUT MATTER WAVES Fig. 39-4 A dot plot of the radial probabilit densit P(r) for the hdrogen atom in a quantum state with a relativel large principal quantum number namel, n 45 and
116 CHAPTER 39 MORE ABOUT MATTER WAVES Fig. 39-4 A dot plot of the radial probabilit densit P(r) for the hdrogen atom in a quantum state with a relativel large principal quantum number namel, n 45 and
A NOTE ON THE DYNAMICS AROUND THE L 1,2 LAGRANGE POINTS OF THE EARTH MOON SYSTEM IN A COMPLETE SOLAR SYSTEM MODEL
 IAA-AAS-DCoSS1-8-8 A NOTE ON THE DYNAMICS AROUND THE L 1,2 LAGRANGE POINTS OF THE EARTH MOON SYSTEM IN A COMPLETE SOLAR SYSTEM MODEL Lian Yijun, Gerard Góme, Josep J. Masdemont, Tang Guojian INTRODUCTION
IAA-AAS-DCoSS1-8-8 A NOTE ON THE DYNAMICS AROUND THE L 1,2 LAGRANGE POINTS OF THE EARTH MOON SYSTEM IN A COMPLETE SOLAR SYSTEM MODEL Lian Yijun, Gerard Góme, Josep J. Masdemont, Tang Guojian INTRODUCTION
OCTUPOLE/QUADRUPOLE/ ACTING IN ONE DIRECTION Alexander Mikhailichenko Cornell University, LEPP, Ithaca, NY 14853
 October 13, 3. CB 3-17 OCTUPOLE/QUADRUPOLE/ ACTIG I OE DIRECTIO Aleander Mikhailichenko Cornell Universit, LEPP, Ithaca, Y 14853 We propose to use elements of beam optics (quads, setupoles, octupoles,
October 13, 3. CB 3-17 OCTUPOLE/QUADRUPOLE/ ACTIG I OE DIRECTIO Aleander Mikhailichenko Cornell Universit, LEPP, Ithaca, Y 14853 We propose to use elements of beam optics (quads, setupoles, octupoles,
NST1A: Mathematics II (Course A) End of Course Summary, Lent 2011
 End of Course Summary, Lent 2011") General notes Proofs NT1A: Mathematics II (Course A) End of Course ummar, Lent 011 tuart Dalziel (011) s.dalziel@damtp.cam.ac.uk This course is not about proofs, but rather about using different techniques.
General notes Proofs NT1A: Mathematics II (Course A) End of Course ummar, Lent 011 tuart Dalziel (011) s.dalziel@damtp.cam.ac.uk This course is not about proofs, but rather about using different techniques.
The notes cover linear operators and discuss linear independence of functions (Boas ).
.") Linear Operators Hsiu-Hau Lin hsiuhau@phsnthuedutw Mar 25, 2010 The notes cover linear operators and discuss linear independence of functions Boas 37-38 Linear operators An operator maps one thing into
Linear Operators Hsiu-Hau Lin hsiuhau@phsnthuedutw Mar 25, 2010 The notes cover linear operators and discuss linear independence of functions Boas 37-38 Linear operators An operator maps one thing into
Green s Theorem Jeremy Orloff
 Green s Theorem Jerem Orloff Line integrals and Green s theorem. Vector Fields Vector notation. In 8.4 we will mostl use the notation (v) = (a, b) for vectors. The other common notation (v) = ai + bj runs
Green s Theorem Jerem Orloff Line integrals and Green s theorem. Vector Fields Vector notation. In 8.4 we will mostl use the notation (v) = (a, b) for vectors. The other common notation (v) = ai + bj runs
SAMPLE. A Gallery of Graphs. To recognise the rules of a number of common algebraic relationships: y = x 1,
 Objectives C H A P T E R 5 A Galler of Graphs To recognise the rules of a number of common algebraic relationships: =, =, = / and + =. To be able to sketch the graphs and simple transformations of these
Objectives C H A P T E R 5 A Galler of Graphs To recognise the rules of a number of common algebraic relationships: =, =, = / and + =. To be able to sketch the graphs and simple transformations of these
1.5. Analyzing Graphs of Functions. The Graph of a Function. What you should learn. Why you should learn it. 54 Chapter 1 Functions and Their Graphs
 0_005.qd /7/05 8: AM Page 5 5 Chapter Functions and Their Graphs.5 Analzing Graphs of Functions What ou should learn Use the Vertical Line Test for functions. Find the zeros of functions. Determine intervals
0_005.qd /7/05 8: AM Page 5 5 Chapter Functions and Their Graphs.5 Analzing Graphs of Functions What ou should learn Use the Vertical Line Test for functions. Find the zeros of functions. Determine intervals
INF Introduction to classifiction Anne Solberg
 INF 4300 8.09.17 Introduction to classifiction Anne Solberg anne@ifi.uio.no Introduction to classification Based on handout from Pattern Recognition b Theodoridis, available after the lecture INF 4300
INF 4300 8.09.17 Introduction to classifiction Anne Solberg anne@ifi.uio.no Introduction to classification Based on handout from Pattern Recognition b Theodoridis, available after the lecture INF 4300
Solutions to Two Interesting Problems
 Solutions to Two Interesting Problems Save the Lemming On each square of an n n chessboard is an arrow pointing to one of its eight neighbors (or off the board, if it s an edge square). However, arrows
Solutions to Two Interesting Problems Save the Lemming On each square of an n n chessboard is an arrow pointing to one of its eight neighbors (or off the board, if it s an edge square). However, arrows
11.1 Double Riemann Sums and Double Integrals over Rectangles
 Chapter 11 Multiple Integrals 11.1 ouble Riemann Sums and ouble Integrals over Rectangles Motivating Questions In this section, we strive to understand the ideas generated b the following important questions:
Chapter 11 Multiple Integrals 11.1 ouble Riemann Sums and ouble Integrals over Rectangles Motivating Questions In this section, we strive to understand the ideas generated b the following important questions:
LESSON 12.2 LOGS AND THEIR PROPERTIES
 LESSON. LOGS AND THEIR PROPERTIES LESSON. LOGS AND THEIR PROPERTIES 5 OVERVIEW Here's what ou'll learn in this lesson: The Logarithm Function a. Converting from eponents to logarithms and from logarithms
LESSON. LOGS AND THEIR PROPERTIES LESSON. LOGS AND THEIR PROPERTIES 5 OVERVIEW Here's what ou'll learn in this lesson: The Logarithm Function a. Converting from eponents to logarithms and from logarithms
Applications of Definite Integrals
 58_Ch7_pp378-433.qd /3/6 :3 PM Page 378 Chapter 7 Applications of Definite Integrals T he art of potter developed independentl in man ancient civilizations and still eists in modern times. The desired
58_Ch7_pp378-433.qd /3/6 :3 PM Page 378 Chapter 7 Applications of Definite Integrals T he art of potter developed independentl in man ancient civilizations and still eists in modern times. The desired
Exponential and Logarithmic Functions
 Eponential and Logarithmic Functions 6 Figure Electron micrograph of E. Coli bacteria (credit: Mattosaurus, Wikimedia Commons) CHAPTER OUTLINE 6. Eponential Functions 6. Logarithmic Properties 6. Graphs
Eponential and Logarithmic Functions 6 Figure Electron micrograph of E. Coli bacteria (credit: Mattosaurus, Wikimedia Commons) CHAPTER OUTLINE 6. Eponential Functions 6. Logarithmic Properties 6. Graphs
Graphing Exponential Functions
 MHF UI Unit Da Graphing Eponential Functions. Using a table of values (no decimals), graph the function.. For the function, state: a) domain b) range c) equation of the asmptote d) -intercept e) -intercept
MHF UI Unit Da Graphing Eponential Functions. Using a table of values (no decimals), graph the function.. For the function, state: a) domain b) range c) equation of the asmptote d) -intercept e) -intercept
ON THE INTERPRETATION OF THE LAGRANGE MULTIPLIERS IN THE CONSTRAINT FORMULATION OF CONTACT PROBLEMS; OR WHY ARE SOME MULTIPLIERS ALWAYS ZERO?
 Proceedings of the ASME 214 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 214 August 17-2, 214, Buffalo, New York, USA DETC214-3479
Proceedings of the ASME 214 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 214 August 17-2, 214, Buffalo, New York, USA DETC214-3479
Limits 4: Continuity
 Limits 4: Continuit 55 Limits 4: Continuit Model : Continuit I. II. III. IV. z V. VI. z a VII. VIII. IX. Construct Your Understanding Questions (to do in class). Which is the correct value of f (a) in
Limits 4: Continuit 55 Limits 4: Continuit Model : Continuit I. II. III. IV. z V. VI. z a VII. VIII. IX. Construct Your Understanding Questions (to do in class). Which is the correct value of f (a) in
Proper Orthogonal Decomposition Extensions For Parametric Applications in Transonic Aerodynamics
 Proper Orthogonal Decomposition Etensions For Parametric Applications in Transonic Aerodnamics T. Bui-Thanh, M. Damodaran Singapore-Massachusetts Institute of Technolog Alliance (SMA) School of Mechanical
Proper Orthogonal Decomposition Etensions For Parametric Applications in Transonic Aerodnamics T. Bui-Thanh, M. Damodaran Singapore-Massachusetts Institute of Technolog Alliance (SMA) School of Mechanical
Simultaneous Orthogonal Rotations Angle
 ELEKTROTEHNIŠKI VESTNIK 8(1-2): -11, 2011 ENGLISH EDITION Simultaneous Orthogonal Rotations Angle Sašo Tomažič 1, Sara Stančin 2 Facult of Electrical Engineering, Universit of Ljubljana 1 E-mail: saso.tomaic@fe.uni-lj.si
ELEKTROTEHNIŠKI VESTNIK 8(1-2): -11, 2011 ENGLISH EDITION Simultaneous Orthogonal Rotations Angle Sašo Tomažič 1, Sara Stančin 2 Facult of Electrical Engineering, Universit of Ljubljana 1 E-mail: saso.tomaic@fe.uni-lj.si
2.1 Rates of Change and Limits AP Calculus
 .1 Rates of Change and Limits AP Calculus.1 RATES OF CHANGE AND LIMITS Limits Limits are what separate Calculus from pre calculus. Using a it is also the foundational principle behind the two most important
.1 Rates of Change and Limits AP Calculus.1 RATES OF CHANGE AND LIMITS Limits Limits are what separate Calculus from pre calculus. Using a it is also the foundational principle behind the two most important
Lecture 6: Distributed Forces Part 2 Second Moment of Area
 Lecture 6: Distributed Forces Part Second Moment of rea The second moment of area is also sometimes called the. This quantit takes the form of The phsical representation of the above integral can be described
Lecture 6: Distributed Forces Part Second Moment of rea The second moment of area is also sometimes called the. This quantit takes the form of The phsical representation of the above integral can be described
Methods for Advanced Mathematics (C3) Coursework Numerical Methods
 Coursework Numerical Methods") Woodhouse College 0 Page Introduction... 3 Terminolog... 3 Activit... 4 Wh use numerical methods?... Change of sign... Activit... 6 Interval Bisection... 7 Decimal Search... 8 Coursework Requirements on
Woodhouse College 0 Page Introduction... 3 Terminolog... 3 Activit... 4 Wh use numerical methods?... Change of sign... Activit... 6 Interval Bisection... 7 Decimal Search... 8 Coursework Requirements on
Exponential and Logarithmic Functions, Applications, and Models
 86 Eponential and Logarithmic Functions, Applications, and Models Eponential Functions In this section we introduce two new tpes of functions The first of these is the eponential function Eponential Function
86 Eponential and Logarithmic Functions, Applications, and Models Eponential Functions In this section we introduce two new tpes of functions The first of these is the eponential function Eponential Function
Distributed Forces: Moments of Inertia
 Distributed Forces: Moments of nertia Contents ntroduction Moments of nertia of an Area Moments of nertia of an Area b ntegration Polar Moments of nertia Radius of Gration of an Area Sample Problems Parallel
Distributed Forces: Moments of nertia Contents ntroduction Moments of nertia of an Area Moments of nertia of an Area b ntegration Polar Moments of nertia Radius of Gration of an Area Sample Problems Parallel
Linear Equations in Linear Algebra
 1 Linear Equations in Linear Algebra 1.1 SYSTEMS OF LINEAR EQUATIONS LINEAR EQUATION,, 1 n A linear equation in the variables equation that can be written in the form a a a b 1 1 2 2 n n a a is an where
1 Linear Equations in Linear Algebra 1.1 SYSTEMS OF LINEAR EQUATIONS LINEAR EQUATION,, 1 n A linear equation in the variables equation that can be written in the form a a a b 1 1 2 2 n n a a is an where