Multibody Dynamics. Education/Advanced Courses. Spring MULTIBODY DYNAMICS (FLERKROPPSDYNAMIK) (FMEN02, 7.5p)
|
|
|
- Lambert Stafford
- 5 years ago
- Views:
Transcription

1 Multibody Dynamics Spring 28 Education/Advancd Courss MULTIBODY DYNAMICS (FLERKROPPSDYNAMIK) (FMEN2, 7.5p)

2 Cours coordinator Prof. Aylin Ahadi, Mchanics, LTH Prof. Emritus Pr Lidström 2
3 COURSE REGISTRATION Multibody Dynamics (FMEN2) Spring 28 pnr ftrnamn förnamn mail Abramowitz Ryan Adibi Pardis Backstam Alxandr Brggrn Jnny Brglund Darll Olivia Dalklint Anna Ek Hofmann Ludvig Fostr John Stwart Hllholm Linna Hodali Cabrra Flip Javir Hultgrn Viktor Itka Rita Jönsson Gustaf Kingsly Albrt Lloriux Virgini Lindqvist Max Lindström Malin Nybrg Johanns Ong Samul Prsson Gustav Sandll Karolina Sarajärvi Marko Schulthis Robin Stnson Dnnis Svanbrg Gustaf 3
 Pr Lidström Kristina Nilsson Division of Mchanics, Lund")
4 FUNDAMENTALS OF MULTIBODY DYNAMICS LECTURE NOTES Multibody systm (MSC ADAMS ) Pr Lidström Kristina Nilsson Division of Mchanics, Lund Univrsity 4

5 Password: ulr Lonard Eulr
6 COURSE BOOK RESERVATION (HARD COPY) Fundamntals of Multibody Dynamics, Lctur Nots SEK 35 Nam Abramowitz Ryan Adibi Pardis Backstam Alxandr Brggrn Jnny Brglund Darll Olivia Dalklint Anna Ek Hofmann Ludvig Fostr John Stwart Hllholm Linna Hodali Cabrra Flip Javir Hultgrn Viktor Itka Rita Jönsson Gustaf Kingsly Albrt Lloriux Virgini Lindqvist Max Lindström Malin Nybrg Johanns Ong Samul Prsson Gustav Sandll Karolina Sarajärvi Schulthis Stnson Svanbrg Marko Robin Dnnis Gustaf Signatur 6
, Projct spcification. Exampls of prvious writtn tsts. Tachr: Prof.")
7 Cours program Cours litratur: Lidström P., Nilsson K.: Fundamntals of Multibody Dynamics, Lctur Nots (LN). Div. of Mchanics, LTH, 27. Th Lctur Nots will b on th Cours wb sit. Hand out matrial: Solutions to slctd Exrciss, Examination tasks (Assignmnts), Projct spcification. Exampls of prvious writtn tsts. Tachr: Prof. Aylin Ahadi (Lcturs, Exrciss, Cours coordination) Phon: , mail: aylin.ahadi@mk.lth.s Schdul (w. -7): Lcturs: Monday 3-5 Tusday 3-5 Thursday - 2, room M:IP2 Exrciss: Wdnsday 8 -, room M:IP2 7
8 8
9 9
10 Cours objctivs and contnts Cours objctivs: Th objctiv of this cours is to prsnt th basic thortical knowldg of th Foundations of Multibody Dynamics with applications to machin and structural dynamics. Th cours givs a mchanical background for applications in, for instanc, control thory and vhicl dynamics. Cours contnts: ) Topics prsntd at lcturs and in th Lctur Nots. 2) Exrciss. 3) Examination tasks 4) Application projct Th scop of th cours is dfind by th curriculum abov and th lctur nots (Fundamntals of Multibody Dynamics, Lctur Nots). Th taching consists of Lcturs and Exrciss: Lcturs: Lcturs will prsnt th topics of th cours in accordanc with th curriculum prsntd abov. Exrciss: Rcommndd xrciss workd out by th studnt will srv as a prparation for th Examination tasks. Solutions to slctd problms will b distributd.
11 Examination
12 CONTENTS. INTRODUCTION 2. BASIC NOTATIONS 2 3. PARTICLE DYNAMICS 3 3. On particl systm Many particl systm RIGID BODY KINEMATICS Th rigid body transplacmnt Th Eulr thorm Mathmatical rprsntations of rotations Vlocity and acclration THE EQUATIONS OF MOTION Th Nwton and Eulr quations of motion Balanc laws of momntum and momnt of momntum Th rlativ momnt of momntum Powr and nrgy 6. RIGID BODY DYNAMICS 4 6. Th quations of motion for th rigid body Th inrtia tnsor Fixd axis rotation and baring ractions Th Eulr quations for a rigid body Powr, kintic nrgy and stability Solutions to th quations of motion: An introduction to th cas of 7. THE DEFORMABLE BODY Kinmatics Equations of motion Powr and nrgy Th lastic body THE PRINCIPLE OF VIRTUAL POWER Th principl of virtual powr in continuum mchanics 29 2
13 . THE MULTIBODY Multibody systms Dgrs of frdom and coordinats Multibody kinmatics Lagrang s quations Constitutiv assumptions and gnralizd intrnal forcs Extrnal forcs Th intraction btwn parts Th Lagrangian and th Powr thorm 295. CONSTRAINTS 3. Constraint conditions 3.2 Lagrang s quations with constraint conditions 35.3 Th Powr Thorm 323. COORDINATE REPRESENTATIONS 327. Coordinat rprsntations Linar coordinats 33.3 Floating fram of rfrnc 359 APPENDICES A A. Matrics A A.2 Vctor spacs A6 A.3 Linar mappings A2 A.4 Th Euclidan point spac A37 A.5 Drivativs of matrics A45 A.6 Th Frobnius thorm A54 A.7 Analysis on Euclidan spac A56 SOME FORMULAS IN VECTOR AND MATRIX ALGEBRA EXERCISES 3



14 Mchanics in prspctiv Quantum Nano Micro-mso - Macro-Continuum lngthscal Å nm µm mm 4
15 Prrquicits Multibody Dynamics Synthsis 3D Analysis Linar algbra Continuum mchanics Mchanics (Basic cours Finit lmnt mthod Matlab Mathmatics Mchanics Numrical analysis 5

16 Contnt Multibody Dynamics Rigid bodis Flxibl bodis Coordinats Constraints Lagrang s quations A multibody systm is a mchanical systm consisting of a numbr of intrconnctd componnts, or parts, prforming motions that may involv larg translations and rotations as wll as small displacmnts such as vibrations. Intrconnctions btwn th componnts ar of vital importanc. Thy will introduc constraints on th rlativ motion btwn componnts and in this way limit th possibl motions which a multibody systm may undrtak. 6

17 Cours objctivs Primary objctivs ar to obtain a thorough undrstanding of rigid body dynamics Lagrangian tchniqus for multibody systms containing constraint conditions a good undrstanding of th dynamics multibodis consisting of coupld rigid bodis som undrstanding of th dynamics of multibodis containing flxibl structurs 7
18 an ability to prform an analysis of a multibody systm and to prsnt th rsult in a writtn rport rad tchnical and scintific rports and articls on multibody dynamics som knowldg of industrial applications of multibody dynamics computr softwars for multibody problms 8







19 Industrial applications Arospac Automotiv Multibody systm dynamics (MBS dynamics) is motivatd by an incrasing nd for analysis, simulations and assssmnts of th bhaviour of machin systms during th product dsign procss. Mchanism Robotics 9

20 Commrcial MBS softwars Adams Dads Simpac Ansys Dymola/Modlinc Simulink/Matlab RcurDyn Adams Studnt Edition Multibody Dynamics Simulation 2

21 Multibody systm Classical stam ngin quippd with a slidr crank mchanism Slidr crank mchanism convrts rciprocating translational motion of th slidr into rotational motion of th crank or th othr way around. 2
22 Multibody systm Conncting rod Rvolut joint Flywhl Translatonal joint Slidr Rvolut joint Fundamnt Crank Figur.2 Stam ngin with slidr crank mchanism. Th crank is connctd to th slidr via a rod which prforms a translational as wll as rotational motion. Th connction btwn th slidr and th rod is maintaind through a so-calld rvolut joint and a similar arrangmnt conncts th rod and th crank. 22
23 Multibody systm A schmatic (topological) pictur of th slidr crank mchanism. Th mchanism consists of thr bodis; th slidr, th crank and th rod. Ths ar connctd by rvolut joints which allow thm to rotat rlativ on anothr in plan motion. It is practical to introduc a fourth part, th ground, which is assumd to b rsting in th fram of rfrnc. 23
24 Joints in thr dimntions Th rvolut joint works lik a hing and allows two connctd parts to rotat rlativ to on anothr around an axis, fixd in both parts. A prismatic or translational joint allows two connctd parts to translat rlativ to on anothr along an axis, fixd in both parts. Th position of th slidr can b masurd by th singl coordinat. W say that th prismatic joint has on dgr of frdom. 24
25 Configuration coordinats Rigid part in plan motion, 3DOF Configuration coordinats: θ, x, C y C 25
26 Multibody systm Guidr = Ground Slidr Rod A θ B ϕ Crank O Ground B ϕ C y C x C A O g x B Figur.3 Topology and coordinats of slidr crank mchanism. # Parts: 4 Configuration coordinats: x, θϕ,, x, y B C C 26
27 Grublr formula Two dimnsional m f= 3N ( ) ri i= Numbr of dgrs of frdom (DOF): f Numbr of parts: N (including th ground) Numbr of joints: m Numbr of DOF rmovd by joint i: r i Rvolut joint: ri = 2 Translational joint: ri = 2 27
28 Joints in thr dimntions ri = 5 ri = 5 m f= 6N ( ) ri i= 28
29 Dgrs of frdom and constraints B C Ground A g θ A θ Ground D B ϕ a) b) Figur.5 a) Thr-bar mchanism b) Th doubl pndulum. 29
 4 2= A θ Ground D Doubl pndulum: N = 3, m 2, = i r = 2 Ground A θ g f= 33 ( ) 2 2= 2 B ϕ")
30 m Grublr formula ( ) i, f= 3N r f i= Slidr crank mchanism: N = 4, m= 4, ri = 2 f= 34 ( ) 4 2= C Thr bar mchanism: N = m= 4, ri = 2 B f= 34 ( ) 4 2= A θ Ground D Doubl pndulum: N = 3, m 2, = i r = 2 Ground A θ g f= 33 ( ) 2 2= 2 B ϕ 3
 2 = 3 2 = 3")
31 Biomchanics A simpl multibody modl of a humanoid in plan locomotion N =, m, = i Ground Figur.6 Human locomotion. r = 2 f = 3( ) 2 = 3 2 = 3
32 Constraints Configuration coordinats: x, θϕ,, x, y B C C If th numbr of configuration coordinats is qual to th numbr of dgrs of frdom of th systm thn w say that w us a minimal st of coordinats. Solutions to ths quations rprsnt th motion of th multibody systm. Howvr, using this approach will hid important information on th dynamics of th systm. For instanc, intrnal forcs in th systm, such as forcs apparing in th joints, will not b accssibl using a minimal st of coordinats. 32

33 Constraints In ordr to b abl to calculat ths forcs on has to incras th numbr of configuration coordinats and along with this introduc constraint conditions rlating ths coordinats in accordanc with th proprtis of th joints btwn th parts. Configuration coordinats: x, θϕ,, x, y B C C Constraint at A: Constraint at B: L Rcosθ + cosϕ xc = 2 L Rsinθ sinϕ yc 2 = L xb cosϕ xc = 2 L sinϕ yc = 2 33
34 Multibody dynamics - th analysis of a mchanical systm rsults in a solution of a st of ordinary diffrntial quations To st up th diffrntial quations w nd a gomtrical dscription of th MBS and its parts including its mass distribution. (In th cas of flxibl parts w also nd to constitut th lastic matrial proprtis of ths parts.) W hav to analyz th connctions btwn parts in trms of thir mchanical proprtis. Proprtis of th connctions in th shap of joints will b rprsntd by constraint conditions, i.. quations rlating th configuration coordinats and thir tim drivativs. Finally th intraction btwn th MBS and its nvironmnt has to b dfind and givn a mathmatical rprsntation. Basd on th fundamntal principls of mchanics; Eulr s laws and th Principl of virtual powr w may thn formulat th diffrntial quations govrning th motion of th MBS. Th solution of ths quations will, in gnral, call for numrical mthods. 34


35 Multibody dynamics softwar Adams Figur.7 Exampls of MBS modls in ADAMS. 35
36 Th rigid body -dos not chang its shap during th motion ω B t c g P p cp Figur.8 Th rigid body. v c This modl concpt may b considrd to b th most important for MBS and many MBS ar qual to systms of coupld rigid bodis. Th gnral motion of a rigid body thus has six dgrs of frdom. vp = vc + ω pcp, P ap = ac + α pcp + ω ( ω pcp ) Th quations of motion F = acm Mc = Icω + ω Iω c I c is th inrtia tnsor of th body with rspct to its cntr of mass 36
 ) dv( X ) 2 λ E + µ E B Grn-St.")
37 Th flxibl body Figur.9 Th flxibl body. Th lastic nrgy U = 2 2 ( (tr ) ) dv( X ) 2 λ E + µ E B Grn-St.Vnant strain tnsor and Lam-moduli 37
38 Th Multibody kinmatics Conncting rod Rvolut joint Flywhl Configuration coordinats: Slidr Rvolut joint Fundamnt Crank 2 n q = q, q,..., q xprssd in trms of ths coordinats and thir tim drivativs Kintic nrgy: T = Tqq (, ) Potntial nrgy: U = Uq ( ) Equations of motion: (Lagrang s quations) d T T U ( ) + k,,..., k k k Q = k = n dt q q q Q k = Q( qq, ) k Gnralizd forc rprsnts xtrnal forcs on th systm and intrnal contact forcs btwn parts 38
39 Equations of motion undr constraints Lagrangian: L= T U Nonconsrvativ forcs: non non Q = Q (, tqq, ) k k non-consrvativ forcs including, for instanc, friction. Constraint quations: m< n n k g + g q ν ν =, ν =,..., m gνk = gνk(, tq) k k= Equations of motion: m d L L non ν ( ) Qk k,,..., k k λ gν = k = n dt q q ν = n k g + g kq ν ν =, ν =,..., m k= m kc Q = λ ν g, k =,..., n k ν = ν k raction forcs du to th kinmatical constraints Constraint forcs: ν ν λ = λ ( t), ν =,..., m 39
40 Chaptr 3: Particl Dynamics is lft for slf study and rcapitulation of basic concpt i mchanics. m v F You may try to solv som of th xrciss but don t spnd to much tim on this introductory chaptr! 4
41 Euclidan spac xyz,,... E Points in Euclidan spac y y x= u V Vctors in Translation vctor spac = x+ u V = ( 2 3) dim( ) = 3 basis a a= a+ 2a2+ 3a3= 2 3 a2 = a a 3 ( ) [ ] 4
42 Cartsian coordinat systm o E Fixd point, = ( 2 3) Fixd basis x= o+ r = o+ x + x + x = o+ r [ ] = o+ [ x] ox ox o E Fixd point, = ( 2 3) f f f f Fixd basis x= o + f [ x] f o = o+ [ o ] x= o+ [ o ] + f[ x] = o+ [ x] f[ x] = ([ x] [ o ] ) f f 3 3 f = B, B R, dtb 42
43 Cartsian coordinat systm Bx [ ] = ([ x] [ o ] ) Bx [ ] = [ x] [ o ] f f Transformation of coordinats for points [ x] = B ([ x] [ o] ) f [ x] = B([ x] [ o] ) f f 43
44 What about vctors? a V a= a [ ], a = f[ a], f = B f a = f[ a] = B[ a] = [ a] [ a] = B[ a] f f f [ a] = B[ a], [ a] = B [ a] f f 44
45 What about tnsors? A End( V ) A = [ A ], Af f [ A], f = B = f [ A] = B [ A] f B [ A] = B[ A] B T B = f f 45
46 Orthonormal basis ( ) = 2 3 i= j = δ = i j i j ij = = = 2 3 T 2 ( 2 3) T = I
47 Orthonormal bass = ( ), 2 3 ( ) f = f f f 2 3 f = B T BB= I, dt B= ± 3 3 Orthonormal matrix 47
48 Th tnsor product Notation: ab, V, a b End( V ) Dfinition: ( a bu ) = ab ( u) 48
49 Th vctor product Notation: ab, V, a b V a b b θ a a b= absinθ Notation: a V, End( V), a Skw( V ) Dfinition: ( a u ) = a u 49
50 Th dtrminant dt Q V ( Qa, Qb, Qc) = = dt[ Q] V ( abc,, ) ON-basis: ( ) = 2 3 5
51 Chaptr 4 :Rigid body kinmatics Rigidity condition: p ( t AB ) = constant, A, B 5
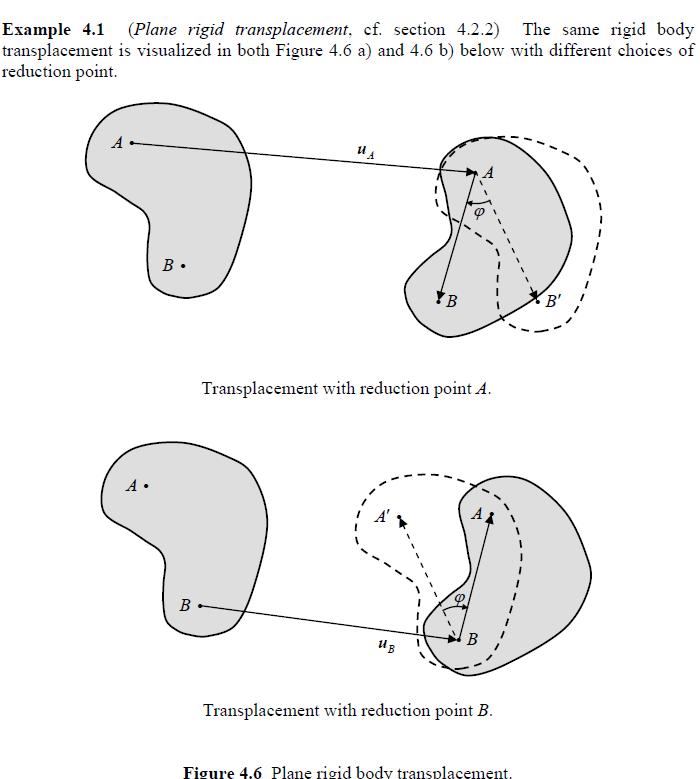
52 4. Rigid body transplacmnt χ(r A ) Position vctors pa = χ( ra), A χ(r A ) - mapping calld transplacmnt W choos a matrial point A as a rfrnc point, calld rduction point. 52
 χ( r ), a V (*) A A A Th mapping has th following proprtis: RA( ) = RA( a) RA( b) = a b, ab, V RA( a) = a, a V Isomtric mapping th lnght of a vctor dos not chang!")
53 Rigid body transplacmnt Fix point A rduction point Transplacmnt: pa = χ( ra), A Rigidity condition: χ( r ) χ( r ) = r r,, B A B A AB Introduc a mapping dfind by: R ( a) : = χ( r + a) χ( r ), a V (*) A A A Th mapping has th following proprtis: RA( ) = RA( a) RA( b) = a b, ab, V RA( a) = a, a V Isomtric mapping th lnght of a vctor dos not chang! 53
54 Rigid body transplacmnt Isomtric mapping is linar: Linarity: R ( αa+ βb) = αr ( a) + βr ( b), ab, V, αβ, A A A R Notation for linar mapping: (w drop th paranthss) R ( a) = Ra A A Isomtry implis orthonormality. R is an orthonormal transformation: T T T RR= R R = V, R = R A A A A A A dt R = ± ddd R A 2 = two possibilitis A Th angl btwn th vctors dos not chang. Both lnght and angl ar prsrvd! RAaRB b = a.b 54
55 Rigid body transplacmnt Start with: From (*) follows: a = r r P A Rfrnc placmnt χ( r + a) = χ( r) + Ra, a V A A A χ( r ) = χ( r ) + R ( r r ) P A A P A Prsnt placmnt p p = R ( r r ) P A A P A p AP = Rr A AP 55
 AB = A AB A Rotation tnsor")
56 Rigid body transplacmnt p R r R SO( V ) AB = A AB A Rotation tnsor 56
 χ( r ) = χ( r + a+ b) χ( r + b) = χ( r + a+ b) χ( r ) B B B A A A A ( χ( r + b) χ( r)) = R( a+ b) Rb= Ra+ Rb Rb= Ra A A A A A A A A W may thus conclud that RA = RB = R, AB, Th")
57 What now, if w chang th rduction point from A to B? b= r r B Changing th rduction point A χ( r ) = χ( r ) + R ( r r ) P A A P A χ( r ) = χ( r ) + R ( r r ) P B B P B What is th rlationship btwn R and? A R B R a = χ( r + a) χ( r ) = χ( r + a+ b) χ( r + b) = χ( r + a+ b) χ( r ) B B B A A A A ( χ( r + b) χ( r)) = R( a+ b) Rb= Ra+ Rb Rb= Ra A A A A A A A A W may thus conclud that RA = RB = R, AB, Th orthogonal transformation rprsnting a transplacmnt of a rigid body is indpndnt of th rduction point! 57
58 Rigid body transplacmnt χ( r + a) = χ( r) + Ra, a V A A A χ( r + a) = χ( r) + Ra, a V B B B Dos th rotation tnsor dpnd on th rduction point? R B = R A? No! RB = RA = R! 58
59 Rigid body transplacmnt ur ( ) = p r = χ( r) r A A A A A Th displacmnt 59
60 Rigid body transplacmnt u = u + ( R r ) P A AP Thorm 4. A rigid body transplacmnt is uniquly dtrmind by th displacmnt of (an arbitrary) rduction point A; u A and an orthonormal transformation R SO( V ) which is indpndnt of th rduction point. 6
61 6
62 Summary Box 4.: Rigid body transplacmnt A: rduction point u A : displacmnt of th rducion point A R: orthogonal transformation with dt R= u= ur ( ) = u + ( R )( r r ) A p= χ() r = χ( r) + Rr ( r ) A A A 62
63 Th translation A translation of a body is a transplacmnt whr all displacmnts ar qual, irrspctiv of th matrial point, i.. u = u = u,, A B AB What dos th associatd orthonormal tnsor look lik? u = u + ( R r ) P A AP ( R a ) = R= 63
64 Th translation u = u = u,,, A B AB 64
65 Th rotation Considr a rotation of th body around a fixd axis in spac through th point Rotation axis: ( A, n) i = 3 n introduc a Right-handd Ortho-Normal basis (a RON-basis ) i = ( i i i ) 2 3 Dcomposition: r = r + nnr ( ) AB AB AB Thn w writ r = AB i x + i2 x2 65
66 Th rotation g B g B p AB x 2 i 2 i r AB ϕ A i g = n A g 3 3 = i3 = n x 2 r = r + nnr ( ) AB AB AB r = i x + i x AB 2 2 Figur 4.9 Rotation around a fixd axis. Th vctor corrsponding to r AB in th prsnt placmnt is: p = p + nn ( p ) AB AB AB p = x + x AB 2 2 r = p = x + x + ( nr ) AB AB 2 AB 66
67 Th rotation = ( ), = n is a RON-basis. This basis is rlatd to i by g B g B p AB x 2 i 2 i r AB ϕ A i g = n A g 3 3 = i3 = n x 2 Figur 4.9 Rotation around a fixd axis. = icosϕ+ i2sinϕ 2 = i( sin ϕ) + i2cos ϕ, ϕ < 2π 3 = i3 = n This can b xprssd in matrix format. 67
68 Th rotation matrix cosϕ sinϕ ( 2 3) = ( i i2 i3) sinϕ cos ϕ, [ ] = i R i [ R] i cosϕ sinϕ = sinϕ cosϕ Th matrix rprsntation of th rotation R is calld th canonical rprsnataion. T T [ ] [ ] = [ ] [ ] = [ ], R R R R [ R] i i i i dt = i 68
69 Th rotation tnsor Now lt R b th tnsor dfind by: Ri = Ri = = 3 = 3 = Ri i n Ri = = i[ R] i p = p + n( n r ) = Ri x + Ri x + Rn( n r ) = R( i x + i x + n( n r )) = Rr AB AB AB 2 2 AB 2 2 AB AB p AB = Rr AB which mans that th rotation is a rigid transplacmnt 69
70 Summary Box 4.3: Rotation ( A, n): rotation axis A: rduction point u = : displacmnt of th rduction point A A cosϕ sinϕ R: orthonormal transformation, [ R] = sinϕ cosϕ i ϕ: rotation angl ϕ < 2π i = ( i i i ): rfrntial bas, i3= n=
 Evry rigid transplacmnt with a fixd point is qual")
71 Th Eulr thorm Thorm 4.2 (Th Eulr thorm, 775) Evry rigid transplacmnt with a fixd point is qual to a rotation around an axis through th fixd point. 7
72 i = ( i i i ), i = n Th canonical rprsntation Th transplacmnt is givn by: pab = RrAB, B W now try to find out if thr ar any points C with th proprty: pac = RrAC = rac i is vctor prpndicular to n If this is tru thn thr ar matrial vctors unaffctd by th transplacmnt. This brings us to th ignvalu problm for th tnsor R Rn = λn 72
73 Th charactristic quation, ignvalus [ ] [ ] p ( λ) = dt( λ R) = dt( λ R ) = R i λ cosϕ sinϕ 2 2 dt sinϕ λ cos ϕ = ( λ )(( λ cos ϕ) + sin ϕ) λ ± i p ( λ) = λ =, λ = ϕ R 23, 73

74 i = ( i i i ), i = n Th canonical rprsntation Rn = λn Eign valu problm: find a matrial points C such that r AC is an ignvctor to R with th corrsponding ignvalu. λ =, i 3 = n Ri [ ] = i R i i is vctor prpndicular to n [ R] i cosϕ sinϕ = sinϕ cosϕ cosϕ sinϕ i T R= i[ R] i = ( i i2 i3) sinϕ cosϕ i2 = i i3 74
75 Th canonical rprsntation cosϕ sinϕ i = ( i i2 i3) sinϕ cosϕ i2 = i3 i ( icos ϕ+ i2sin ϕ i( sin ϕ)+ i2cos ϕ i3) i2 = i3 ( i cos ϕ+ i sin ϕ) i +( i ( sin ϕ)+ i cos ϕ) i + i i ) = Equivalnt to th following tnsor-product rprsntation of R R= i i + ( i i + i i )cos ϕ+ ( i i i i )sinϕ n n+ cos ϕ( n n) + sinϕn 75
76 Summary Box 4.5: Rigid transplacmnt A: r A u A : r : p : R : : rduction point position vctor of th rduction point in th rfrnc placmnt displacmnt of th rducion point position vctor of a matrial point in th rfrnc placmnt position vctor of a matrial point in th prsnt placmnt rotation tnsor p= χ() r = ra + u ( ) { A + Rr ra translation rotation 76
 S Scrw lin { S rs ra ras n σ, σ } = = + + T ( R ) ua =, ϕ 2 ( cos ϕ) AS S Thorm 4.")
77 Scrw rprsntation of th transplacmnt u A Sinc th translation changs with th rduction point A and th rotation R is indpndnt of this choic w may ask if thr is a spcific rduction point S such that th displacmnt is paralll to th rotation axis. u S L S r p= r + ns + Rr ( r) S Scrw lin { S rs ra ras n σ, σ } = = + + T ( R ) ua =, ϕ 2 ( cos ϕ) AS S Thorm 4.3 (Chasls Thorm, 83) Evry transplacmnt of a rigid body can b ralizd by a rotation about an axis combind with a translation of minimum magnitud paralll to that axis. Th rduction point for this so-calld scrw transplacmnt is locatd on th scrw lin givn in (4.28). 77
78 Th spcial orthogonal group Th st of all orthonormal tnsors on V forms an algbraic group, th orthonormal group, Bing a group mans that T T { Q Q Q QQ } O ( V ) = = = Q, Q2 O( V) QQ 2 O( V) O( V ) Q = Q O( V ) T Howvr, in gnral w hav QQ 2 QQ 2 and w say that th opration of combining orthonormal tnsors is non-commutativ. Th st of all rotations forms a subgroup in O( V ) calld th spcial orthonormal group { R R= } SO( V) = O( V ) dt 78
79 Non-commutativity of rotations Combining rotations is thus a non-commutativ opration as can b sn from th figur blow. Th spcial orthonormal group has th mathmatical structur of a so-calld Li-group. 79
80 Chaptr 4.3 Th main rprsntation thorm Thorm 4. To vry rotation tnsor R SO( V ) thr xists a unit vctor n and an angl ϕ so that R= R( n, ϕ) = n n+ cos ϕ( n n) + sinϕn This rprsntation is mainly uniqu. If R= thn n may b arbitrarily chosn, whil ϕ = ( modulo 2π). If R thn n is uniquly dtrmind, apart from a factor ±. For a givn n th angl ϕ is uniquly dtrmind ( modulo 2π ). For a dfinition of th tnsor a End( V ) s Appndix A
81 Th main rprsntation thorm using componnts R= R( n, ϕ) = n n+ cos ϕ( n n) + sinϕn n = ( 2 3) n= [ n] [ n] = n 2 n 3 n nn nn 2 nn 3 T n n = n n = n2 n n2 n3 = nn 2 nn 2 2 nn 2 3 n 3 nn 3 nn 3 2 nn 3 3 [ ] [ ] [ ] ( ) n3 n2 = = n n n2 n [ n ] [ n] [ ] 3 82
82 Th main rprsntation thorm using componnts R= n n+ cos ϕ( n n) + sinϕn [ ] = ( 2 3) n n [ n] = n = n2 n 3 [ R] [ n n] cos ϕ[ ( n n) ] sinϕ[ n ] = + + = T T [ n] [ n] + cos ϕ( [ ] [ n] [ n] ) + sinϕ[ n ] 83
83 How to calculat th rotation axis n and th rotation angl φ from th rotation tnsor R R= n n+ cos ϕ( n n) + sinϕn R n, ϕ? b = ( b b b ) 2 3 arbitrary RON-basis Eignvalu problm [ ] [ ] [ ] [ ] Rn = n ( R ) n = ( R ) n = b b [ R] b R R2 R3 = R2 R22 R23 R3 R32 R 33 R 3 3 [ n] b n = n2 n 3 R 3 84
84 Th ignvalu problm R λ R2 R3 n R R λ R n = R3 R32 R33 λ n 3 R λ R2 R3 pr( λ) = dt R2 R22 λ R23 R3 R32 R33 λ ± i p ( λ) = λ =, λ = ϕ R 23, cos λ 2 + λ 3 2 3, sin λ ϕ = ϕ = λ 2 2i 85
85 Th ignvalu problm λ = R R2 R3 n n R R R n = n R3 R32 R33 n 3 n 3 n [ R] cosϕ sinϕ = sinϕ cosϕ trr = R + R + R = + 2cosϕ trr R + R22 + R33 arccos( ) = arccos( ) 2 2 ϕ = R + R22 + R33 2π arccos( ) 2 86
86 Coordinat rprsntations of SO( V ) Eulr angls Bryant angls Eulr paramtrs Quatrnions 87

87 Eulr angls: ( ψθφ,, ) Rfrnc placmnt Prsnt placmnt [ ] o R R o o = = 88
88 Factorization: ( ψθφ,, ) R 3 ( ψ ) R ( θ ) R 3 ( φ) f = 3 3 g 3 θ f 3 g 2 = g g 2 f 2 f 2 ψ f 2 g = f g φ R= R ( φ) R ( θ) R ( ψ) 3 3 Evry rotation may b writtn as a product of thr simpl rotations. 89
89 Eulr angls: First rotation o W start th factorization by introducing th first rotation R3( ψ) : 3ψ which brings th o bas to th bas f = ( f f2 f ) o o 3 by rotating around th axis with dirction 3 angl ψ. ψ f = 3 3 ψ f 2 f 2 = ( ) 2 3 f = ( f f f ) 2 3 [ ψ ] o o f = R3( ψ) = R3( ) o, cosψ sinψ ( ψ) o = sinψ cosψ [ R ] 3 9
90 Eulr angls: Scond rotation θ Nxt w tak th rotation R( θ) : fθ which brings f to th RON-basis g = ( g g2 g3) by a rotation with th angl θ around an axis with th dirction f, th so-calld intrmdiat axis. g 3 θ f 3 g 2 f 2 f = ( f f f ) 2 3 g = f g = ( g g g ) 2 3 [ θ ] g = R( θ) f = f R( ), f ( θ) = cosθ sinθ f sinθ cosθ [ R ] 9
91 Eulr angls: Third rotation φ Finally w tak th rotation R3( φ) : g3φ which brings g to th final basis by a rotation th angl φ around an axis with dirction g3. = g g 2 g = ( g g g ) 2 3 φ = ( ) 2 3 g R 3( φ) g g [ R 3( φ) ], [ R ] = = g 3 cosφ sinφ ( φ) = sinφ cosφ g 92
92 Eulr angls: All rotations in combination R-substitution yilds: o f = R3( ψ) = R3( ) g = R( θ) f = f R( ) f = R3( φ) g = g[ R3( φ) ] g o[ ψ ] [ θ ] o [ ( φ) ] [ ( θ) ] [ ( φ) ] [ ( ψ) ] [ ( θ) ] [ ( φ) ] o o = R = g R3 = f R R3 = R g f g 3 R R f 3 g o [ R] o [ ] o [ ] [ ] o o o = R = R3( φ) R( θ) R3( ψ) = R3( ψ) R( θ) R3( φ) f g 93
93 Eulr angls: Th rotation o ψ θ φ f g [ R] o [ R ( ψ) ] o [ R ( θ) ] [ R ( φ) ] = = 3 f 3 g cosψ sinψ cosφ sinφ sinψ cosψ cosθ sinθ sinφ cosφ = sinθ cosθ cosψ cosφ sinψ cosθsinφ cosψ sinφ sinψ cosθcosφ sinψ sinθ sinψ cosφ+ cosψ cosθsinφ sinψ sinφ+ cosψ cosθcosφ cosψ sinθ sinθsinφ sinθcosφ cosθ 94

94 Eulr angls f Thorm 4.2 A rotation R is dtrmind by a st of thr ral coordinats, calld th Eulr 3 angls: ( ψ, θ, φ) R, ψ < 2π, θ π, φ < 2π. Convrsly ths angls ar ssntially dtrmind by R. In fact th angl θ [, π] θ ], π[ thn also ψφ, [ 2, π[ is uniquly dtrmind by R. If ar uniquly dtrmind by R. Whn θ = only ψ + φ is uniquly dtrmind and whn θ = π only ψ φ. 95
95 Eulr angls: Singularity Spcial cas: θ =, π [ R] o cosψ cosφ± sinψ sinφ cosψ sinφ± sinψ cosφ = sinψ cosφ± cosψ sinφ sinψ sinφ± cosψ cosφ = ± cos( ψ ± φ) sin( ψ ± φ) R R2 R3 sin( ψ ± φ) cos( ψ ± φ) = R2 R22 R23 R3 R32 R ± 33 Only ψ ± φ is dtrmind. Singular! 96
96 Eulr angls: Singularity [ R] o R R2 R3 = R2 R22 R23 = R3 R32 R 33 cosψ cosφ sinψ cosθsinφ cosψ sinφ sinψ cosθcosφ sinψ sinθ sinψ cosφ+ cosψ cosθsinφ sinψ sinφ+ cosψ cosθcosφ cosψ sinθ sinθsinφ sinθcosφ cosθ 2 cos θ = R, sinθ = cos θ 33 R23 R3 cos ψ =, sinψ = sinθ sinθ R32 R3 cos φ =, sinφ = sinθ sinθ θ =, π singular Ths formulas show that numrical difficultis ar to b xpctd for valus of θ clos to nπ, n=,,... 97
cos( φ+ ψ) + cosθ 2 ψ φ θ 98 Figur 4.")
97 Th rotation angl trr = + 2cos ϕ = ( + cos θ) cos( φ+ ψ) + cosθ cosϕ = ( + cos θ)cos( φ+ ψ) + cosθ 2 ψ φ θ 98 Figur 4.5 Th gyroscop.
98 Chaptr Eulr paramtrs SSSSS ffff ttt fffffffffff rrrrrrrrrrrrrr: R= n n+ cos ϕ( n n) + sinϕn = + ( cos ϕ)( n n ) + sinϕn us of th trigonomtric idntitis ϕ cosϕ ϕ ϕ sin 2 = sinϕ = 2sin cos ϕ ϕ ϕ R= + 2sin n ( n ) + 2sin cos n IIIIIIIII ϕ ϕ = cos, = nsin
99 Eulr paramtrs tttt ww haaa R= + 2( )( ) + 2 With a spcific RON basis in which b = ( b b b ), RON-basis, 2 3 n= b + b + b n 2n, 2 3n3 n = ϕ ϕ = cos, = nsin 2 2 Thn w hav th following rlations: = b+ b22+ b33 ϕ ϕ ϕ ϕ = cos, = nsin, 2 = n2sin, 3 = n3sin n.n = = (,, 2, 3) R, = S = { = R } 3 S 3 R 4 This constraint on th Eulr paramtrs rprsnts th unit sphr Th paramtrs = (,, 2, 3) ar known as th Eulr paramtrs.
100 [ R() ] How to calculat matrix lmnts from Eulr paramtrs To indicat th Eulr paramtrs associatd with a rotation w writ R= R( ) = R(, ) = + 2( ) + 2, = (, ) S = b 2 3 b = ( b b b ), RON-basis, = ( + ) 2 ( 2 3) 2 ( 3+ 2) ( 2+ 3) 2 ( + 2) 2 ( 2 3 ) ( 3 2) 2 ( 2 3+ ) 2 ( + 3)
101 How to calculat Eulr paramtrs from matrix lmnts [ R] o R R R R R R R R R 2 3 = trr + R + R22 + R33 + = = Rii trr + 2Rii R R22 R33 i = =, i= 23,, No singularity! (In contrast to th Eulr angls) Thr is a 2 - corrspondnc btwn Eulr paramtrs and rotation matrics! 2
102 How to calculat Eulr paramtrs from matrix lmnts, condinud = (,,, ) (,,, ) R + R + R =± = R R , 2 R3 R3 R2 R2 =, 3 = 4 4 3
103 How to calculat Eulr paramtrs from matrix lmnts R + R + R =± = 4, 2 = R2 + R2 4, 3 = R3 + R3 423 = R32 + R23 + R R22 R33 =, =± 4 2 = R + R 4 2 2, 3 = R + R
104 Spcial cass: How to calculat Eulr paramtrs from matrix lmnts + R22 R R33 =, =, 2 =± 4 3 = R + R R33 R R22 =, =, 2 =, 3 =± 4 5
105 Chaptr Th composition of rotations Lt R and R 2 b two rotations. Th composition of R and R 2 is givn by R = RR 2 and this rprsnts anothr rotation. W hav th following Proposition 4. If R = R(,, ), R2 = R2( 2,, 2) and R= RR 2 thn R= R(, ) whr =, = 2, + 2, + 2 (4.8), 2, 2 Corollary 4. Two rotations commut if and only if thir rotation axs ar paralll, i.. RR = RR P
106 Chaptr Th xponntial map Rotation Skw-sym. Tnsor R: nϕ SO( V ) N = n Skw( V ) Expanding in Maclaurin sris: 2 3 ϕ 2 ϕ 3 R= + ϕn + N + N +... = xp( ϕn) = xp( nϕ ) 2! 3! Th xponntial map: 2 3 xp( A) : = + A+ A + A +..., A End( V ) 2! 3! 7
 t = r A + ua() t + R()( t rp")
107 Chaptr 4.4 Tim-dpndnt transplacmnt, Motion vlocitiy and acclration rrrrr tttttttttttttt pp = χ( rp,) t = r A + ua() t + R()( t rp ra) = pa() t + R()( t rp ra), t = p A () t Th rigid motion is a st of rigid transplacmnts paramtrizd by tim t 8
 T = RR T = RR T = W RR = RR + RR = RR = RR T T T T T Rigid body vlocity fild: vp = va + ω pap,")
108 Rigid body vlocity Spin tnsor: W = Angular vlocity: (axial vctor of ) W RR T T ω = ax( RR ) anti-symmtric tnsor, sinc: W T = ( RR T ) T = RR T = RR T = W RR = RR + RR = RR = RR T T T T T Rigid body vlocity fild: vp = va + ω pap, P 9
 = R R= R( t) = (xp( ω( s) ds )) R t ω= ω() t t =")

109 Rigid body rotation T W = RR R = WR = ( ω R ) = ω R R = ω R R( ) = R R= R( t) = (xp( ω( s) ds )) R t ω= ω() t t = R= R() t Thus, if th angular vlocity is known and th rotation tnsor is known at tim thn th rotation tnsor : is known.
110 Rigid body acclration ap = aa + α pap + ω ( ω pap ), P It is mor difficult to graphically illustrat th acclration fild than th vlocity fild. W look at th spcial cas whn th body rotats around an axis with fixd dirction α ω ω= nω, α = nω, n = Tangntial acclration Cntriptal acclration ω ( ω p ) AP g β g P p AP α p AP Th tangntial and normal parts of th rlativ acclration: α pap = ω n pap = ω pap sin β = ω d Bt A g a A 2 2 AP AP AP d ω ( ω p ) = ω ω p = ω p sin β = ω
111 4.4.2 Eulr-Poisson vlocity formula for moving bass Starting from a fixd RON-bas In th rfrnc placmnt = ( ) R 3 ω 2 = ( ) RON-basis following th rotation of th rigid body = R, = R, = R [ R] = [ R] 2
112 Eulr-Poisson vlocity formula for moving bass 3 R 3 ω 2 2 3
113 Eulr-Poisson vlocity formula for moving vctors and tnsors a = a() t = i ta() t 3 i= i ( ) 3 i i= a = a = a i rl a = ω a+ a rl 3 i i, j= A= A() t = () t () t A () t j ij ( ) 3 i i, j= A = () t () t A () t = A j ij rl A = ω A Aω ( ) + A rl 4
114 Angular acclration moving vctor a = ω a+ a rl 3 ω 3 ω= iωi i= rl rl ω= ω ω+ ω = ω 2 = rl 3 = i i= ω ω ω i 5
115 Angular vlocity and Eulr angls 6
116 Combining rotations Th addition of angular vlocitis, vrsion considr two rotation tnsors R R = t () R = R t 2 2 () th combind rotation tnsor R = RR 2 W introduc th angular vlocitis ω T = ax( RR ) ω T = ax( RR ) ( T ω = ax RR ) ω= ω2 + Rω 2 Addition rul not usd that oftn 7
117 Combining rotations Th addition of angular vlocitis, vrsion 2 3 R f 3 ω f f 2 R 2 g 3 ω g 2 f f = R g = 2 R f g ω gf g 2 R = RR g = R 2 T ω = ω = ax( R R ) f T ω = ax(( R ) R ) gf 2 f 2 T ω= ω = ax( RR ) g 8
118 Combining rotations Th addition of angular vlocitis, vrsion 2 3 R f 3 ω f f 2 R 2 g 3 ω g 2 f g ω gf g 2 ω = ω + ω g gf f Addition rul 2 9
119 2
120 2
121 Eulr angls, first rotation T ω = ω = ax( R R ) f [ ψ ] o o f = R3( ψ) = R3( ) o, cosψ sinψ ( ψ) o = sinψ cosψ [ R ] 3 By us of Lmma 4. 22
122 Eulr angls,scond rotation [ θ ] g = R( θ) f = f R( ), f ( θ) = cosθ sinθ f sinθ cosθ [ R ] 23
123 Eulr angls, third rotation [ φ ] = R3( φ) g = g R3( ), g cosφ sinφ ( φ) = sinφ cosφ g [ R ] 3 24
124 25
125 Exrcis :2 Givn a rotation tnsor R= R ( ψθφ,, ) whr ψθφ,, ar Eulr angls. Calculat th R (,, ) and R( 5, 35, 6 ). matrics [ ] 32
126 Exrcis :2 Th rotation matrix xprssd in Eulr angls: R( ψ, θ, φ ) := cos( ψ) sin( ψ) sin( ψ) cos( ψ) cos( θ) sin( θ) sin( θ) cos( θ) cos( φ ) sin( φ ) sin( φ ) cos( φ ) Convrsion from dgrs to radians: R d ( ψ, θ, φ ) := R ψ π, θ π, φ π Calculation of th rotation matrix: R d ( 5, 35, 6) = Chcking th rotation matrix: R d ( 5, 35, 6) R d ( 5, 35, 6) T = R d ( 5, 35, 6) = Calculating th rotation of th first basis vctor: R d ( 5, 35, 6) =

127 Exrcis :4 Th mchanism to control th dploymnt of a spaccraft solar panl from position A to position B is to b dsignd. Dtrmin th transplacmnt, i.. th translation vctor and rotation tnsor R, which can achiv th rquird chang of placmnt. Th sid facing th positiv x-dirction in position A must fac th positiv z-dirction in position B. Calculat th rotation vctor n ϕ corrsponding to th rotation. (Mriam & Kraig 7/). 34

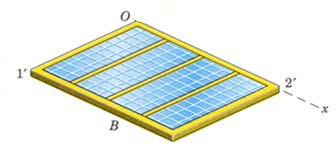
128 Exrcis :4 3 n ϕ
Division of Mechanics Lund University MULTIBODY DYNAMICS. Examination Name (write in block letters):.
:.") Division of Mchanics Lund Univrsity MULTIBODY DYNMICS Examination 7033 Nam (writ in block lttrs):. Id.-numbr: Writtn xamination with fiv tasks. Plas chck that all tasks ar includd. clan copy of th solutions
Division of Mchanics Lund Univrsity MULTIBODY DYNMICS Examination 7033 Nam (writ in block lttrs):. Id.-numbr: Writtn xamination with fiv tasks. Plas chck that all tasks ar includd. clan copy of th solutions
San José State University Aerospace Engineering AE 138 Vector-Based Dynamics for Aerospace Applications, Fall 2016
 San José Stat Univrsity Arospac Enginring AE 138 Vctor-Basd Dynamics for Arospac Applications, Fall 2016 Instructor: Offic Location: Email: Offic Hours: Class Days/Tim: Classroom: Prof. J.M. Huntr E272F
San José Stat Univrsity Arospac Enginring AE 138 Vctor-Basd Dynamics for Arospac Applications, Fall 2016 Instructor: Offic Location: Email: Offic Hours: Class Days/Tim: Classroom: Prof. J.M. Huntr E272F
That is, we start with a general matrix: And end with a simpler matrix:
 DIAGON ALIZATION OF THE STR ESS TEN SOR INTRO DUCTIO N By th us of Cauchy s thorm w ar abl to rduc th numbr of strss componnts in th strss tnsor to only nin valus. An additional simplification of th strss
DIAGON ALIZATION OF THE STR ESS TEN SOR INTRO DUCTIO N By th us of Cauchy s thorm w ar abl to rduc th numbr of strss componnts in th strss tnsor to only nin valus. An additional simplification of th strss
Hydrogen Atom and One Electron Ions
 Hydrogn Atom and On Elctron Ions Th Schrödingr quation for this two-body problm starts out th sam as th gnral two-body Schrödingr quation. First w sparat out th motion of th cntr of mass. Th intrnal potntial
Hydrogn Atom and On Elctron Ions Th Schrödingr quation for this two-body problm starts out th sam as th gnral two-body Schrödingr quation. First w sparat out th motion of th cntr of mass. Th intrnal potntial
The Matrix Exponential
 Th Matrix Exponntial (with xrciss) by D. Klain Vrsion 207.0.05 Corrctions and commnts ar wlcom. Th Matrix Exponntial For ach n n complx matrix A, dfin th xponntial of A to b th matrix A A k I + A + k!
Th Matrix Exponntial (with xrciss) by D. Klain Vrsion 207.0.05 Corrctions and commnts ar wlcom. Th Matrix Exponntial For ach n n complx matrix A, dfin th xponntial of A to b th matrix A A k I + A + k!
The Matrix Exponential
 Th Matrix Exponntial (with xrciss) by Dan Klain Vrsion 28928 Corrctions and commnts ar wlcom Th Matrix Exponntial For ach n n complx matrix A, dfin th xponntial of A to b th matrix () A A k I + A + k!
Th Matrix Exponntial (with xrciss) by Dan Klain Vrsion 28928 Corrctions and commnts ar wlcom Th Matrix Exponntial For ach n n complx matrix A, dfin th xponntial of A to b th matrix () A A k I + A + k!
CHAPTER 1. Introductory Concepts Elements of Vector Analysis Newton s Laws Units The basis of Newtonian Mechanics D Alembert s Principle
 CHPTER 1 Introductory Concpts Elmnts of Vctor nalysis Nwton s Laws Units Th basis of Nwtonian Mchanics D lmbrt s Principl 1 Scinc of Mchanics: It is concrnd with th motion of matrial bodis. odis hav diffrnt
CHPTER 1 Introductory Concpts Elmnts of Vctor nalysis Nwton s Laws Units Th basis of Nwtonian Mchanics D lmbrt s Principl 1 Scinc of Mchanics: It is concrnd with th motion of matrial bodis. odis hav diffrnt
MA 262, Spring 2018, Final exam Version 01 (Green)
") MA 262, Spring 218, Final xam Vrsion 1 (Grn) INSTRUCTIONS 1. Switch off your phon upon ntring th xam room. 2. Do not opn th xam booklt until you ar instructd to do so. 3. Bfor you opn th booklt, fill in
MA 262, Spring 218, Final xam Vrsion 1 (Grn) INSTRUCTIONS 1. Switch off your phon upon ntring th xam room. 2. Do not opn th xam booklt until you ar instructd to do so. 3. Bfor you opn th booklt, fill in
Addition of angular momentum
 Addition of angular momntum April, 07 Oftn w nd to combin diffrnt sourcs of angular momntum to charactriz th total angular momntum of a systm, or to divid th total angular momntum into parts to valuat
Addition of angular momntum April, 07 Oftn w nd to combin diffrnt sourcs of angular momntum to charactriz th total angular momntum of a systm, or to divid th total angular momntum into parts to valuat
Addition of angular momentum
 Addition of angular momntum April, 0 Oftn w nd to combin diffrnt sourcs of angular momntum to charactriz th total angular momntum of a systm, or to divid th total angular momntum into parts to valuat th
Addition of angular momntum April, 0 Oftn w nd to combin diffrnt sourcs of angular momntum to charactriz th total angular momntum of a systm, or to divid th total angular momntum into parts to valuat th
Dynamic Modelling of Hoisting Steel Wire Rope. Da-zhi CAO, Wen-zheng DU, Bao-zhu MA *
 17 nd Intrnational Confrnc on Mchanical Control and Automation (ICMCA 17) ISBN: 978-1-6595-46-8 Dynamic Modlling of Hoisting Stl Wir Rop Da-zhi CAO, Wn-zhng DU, Bao-zhu MA * and Su-bing LIU Xi an High
17 nd Intrnational Confrnc on Mchanical Control and Automation (ICMCA 17) ISBN: 978-1-6595-46-8 Dynamic Modlling of Hoisting Stl Wir Rop Da-zhi CAO, Wn-zhng DU, Bao-zhu MA * and Su-bing LIU Xi an High
The van der Waals interaction 1 D. E. Soper 2 University of Oregon 20 April 2012
 Th van dr Waals intraction D. E. Sopr 2 Univrsity of Orgon 20 pril 202 Th van dr Waals intraction is discussd in Chaptr 5 of J. J. Sakurai, Modrn Quantum Mchanics. Hr I tak a look at it in a littl mor
Th van dr Waals intraction D. E. Sopr 2 Univrsity of Orgon 20 pril 202 Th van dr Waals intraction is discussd in Chaptr 5 of J. J. Sakurai, Modrn Quantum Mchanics. Hr I tak a look at it in a littl mor
Sundials and Linear Algebra
 Sundials and Linar Algbra M. Scot Swan July 2, 25 Most txts on crating sundials ar dirctd towards thos who ar solly intrstd in making and using sundials and usually assums minimal mathmatical background.
Sundials and Linar Algbra M. Scot Swan July 2, 25 Most txts on crating sundials ar dirctd towards thos who ar solly intrstd in making and using sundials and usually assums minimal mathmatical background.
Introduction to Multicopter Design and Control
 Introduction to Multicoptr Dsign and Control Lsson 05 Coordinat Systm and Attitud Rprsntation Quan Quan, Associat Profssor _uaa@uaa.du.cn BUAA Rlial Flight Control Group, http://rfly.uaa.du.cn/ Bihang
Introduction to Multicoptr Dsign and Control Lsson 05 Coordinat Systm and Attitud Rprsntation Quan Quan, Associat Profssor _uaa@uaa.du.cn BUAA Rlial Flight Control Group, http://rfly.uaa.du.cn/ Bihang
Elements of Statistical Thermodynamics
 24 Elmnts of Statistical Thrmodynamics Statistical thrmodynamics is a branch of knowldg that has its own postulats and tchniqus. W do not attmpt to giv hr vn an introduction to th fild. In this chaptr,
24 Elmnts of Statistical Thrmodynamics Statistical thrmodynamics is a branch of knowldg that has its own postulats and tchniqus. W do not attmpt to giv hr vn an introduction to th fild. In this chaptr,
Background: We have discussed the PIB, HO, and the energy of the RR model. In this chapter, the H-atom, and atomic orbitals.
 Chaptr 7 Th Hydrogn Atom Background: W hav discussd th PIB HO and th nrgy of th RR modl. In this chaptr th H-atom and atomic orbitals. * A singl particl moving undr a cntral forc adoptd from Scott Kirby
Chaptr 7 Th Hydrogn Atom Background: W hav discussd th PIB HO and th nrgy of th RR modl. In this chaptr th H-atom and atomic orbitals. * A singl particl moving undr a cntral forc adoptd from Scott Kirby
Content Skills Assessments Lessons. Identify, classify, and apply properties of negative and positive angles.
 Tachr: CORE TRIGONOMETRY Yar: 2012-13 Cours: TRIGONOMETRY Month: All Months S p t m b r Angls Essntial Qustions Can I idntify draw ngativ positiv angls in stard position? Do I hav a working knowldg of
Tachr: CORE TRIGONOMETRY Yar: 2012-13 Cours: TRIGONOMETRY Month: All Months S p t m b r Angls Essntial Qustions Can I idntify draw ngativ positiv angls in stard position? Do I hav a working knowldg of
2008 AP Calculus BC Multiple Choice Exam
 008 AP Multipl Choic Eam Nam 008 AP Calculus BC Multipl Choic Eam Sction No Calculator Activ AP Calculus 008 BC Multipl Choic. At tim t 0, a particl moving in th -plan is th acclration vctor of th particl
008 AP Multipl Choic Eam Nam 008 AP Calculus BC Multipl Choic Eam Sction No Calculator Activ AP Calculus 008 BC Multipl Choic. At tim t 0, a particl moving in th -plan is th acclration vctor of th particl
Introduction to Condensed Matter Physics
 Introduction to Condnsd Mattr Physics pcific hat M.P. Vaughan Ovrviw Ovrviw of spcific hat Hat capacity Dulong-Ptit Law Einstin modl Dby modl h Hat Capacity Hat capacity h hat capacity of a systm hld at
Introduction to Condnsd Mattr Physics pcific hat M.P. Vaughan Ovrviw Ovrviw of spcific hat Hat capacity Dulong-Ptit Law Einstin modl Dby modl h Hat Capacity Hat capacity h hat capacity of a systm hld at
Lecture 37 (Schrödinger Equation) Physics Spring 2018 Douglas Fields
 Physics Spring 2018 Douglas Fields") Lctur 37 (Schrödingr Equation) Physics 6-01 Spring 018 Douglas Filds Rducd Mass OK, so th Bohr modl of th atom givs nrgy lvls: E n 1 k m n 4 But, this has on problm it was dvlopd assuming th acclration
Lctur 37 (Schrödingr Equation) Physics 6-01 Spring 018 Douglas Filds Rducd Mass OK, so th Bohr modl of th atom givs nrgy lvls: E n 1 k m n 4 But, this has on problm it was dvlopd assuming th acclration
Quasi-Classical States of the Simple Harmonic Oscillator
 Quasi-Classical Stats of th Simpl Harmonic Oscillator (Draft Vrsion) Introduction: Why Look for Eignstats of th Annihilation Oprator? Excpt for th ground stat, th corrspondnc btwn th quantum nrgy ignstats
Quasi-Classical Stats of th Simpl Harmonic Oscillator (Draft Vrsion) Introduction: Why Look for Eignstats of th Annihilation Oprator? Excpt for th ground stat, th corrspondnc btwn th quantum nrgy ignstats
Solution: APPM 1360 Final (150 pts) Spring (60 pts total) The following parts are not related, justify your answers:
 Spring (60 pts total) The following parts are not related, justify your answers:") APPM 6 Final 5 pts) Spring 4. 6 pts total) Th following parts ar not rlatd, justify your answrs: a) Considr th curv rprsntd by th paramtric quations, t and y t + for t. i) 6 pts) Writ down th corrsponding
APPM 6 Final 5 pts) Spring 4. 6 pts total) Th following parts ar not rlatd, justify your answrs: a) Considr th curv rprsntd by th paramtric quations, t and y t + for t. i) 6 pts) Writ down th corrsponding
Section 11.6: Directional Derivatives and the Gradient Vector
 Sction.6: Dirctional Drivativs and th Gradint Vctor Practic HW rom Stwart Ttbook not to hand in p. 778 # -4 p. 799 # 4-5 7 9 9 35 37 odd Th Dirctional Drivativ Rcall that a b Slop o th tangnt lin to th
Sction.6: Dirctional Drivativs and th Gradint Vctor Practic HW rom Stwart Ttbook not to hand in p. 778 # -4 p. 799 # 4-5 7 9 9 35 37 odd Th Dirctional Drivativ Rcall that a b Slop o th tangnt lin to th
Brief Introduction to Statistical Mechanics
 Brif Introduction to Statistical Mchanics. Purpos: Ths nots ar intndd to provid a vry quick introduction to Statistical Mchanics. Th fild is of cours far mor vast than could b containd in ths fw pags.
Brif Introduction to Statistical Mchanics. Purpos: Ths nots ar intndd to provid a vry quick introduction to Statistical Mchanics. Th fild is of cours far mor vast than could b containd in ths fw pags.
Self-Adjointness and Its Relationship to Quantum Mechanics. Ronald I. Frank 2016
 Ronald I. Frank 06 Adjoint https://n.wikipdia.org/wiki/adjoint In gnral thr is an oprator and a procss that dfin its adjoint *. It is thn slf-adjoint if *. Innr product spac https://n.wikipdia.org/wiki/innr_product_spac
Ronald I. Frank 06 Adjoint https://n.wikipdia.org/wiki/adjoint In gnral thr is an oprator and a procss that dfin its adjoint *. It is thn slf-adjoint if *. Innr product spac https://n.wikipdia.org/wiki/innr_product_spac
Finite element discretization of Laplace and Poisson equations
 Finit lmnt discrtization of Laplac and Poisson quations Yashwanth Tummala Tutor: Prof S.Mittal 1 Outlin Finit Elmnt Mthod for 1D Introduction to Poisson s and Laplac s Equations Finit Elmnt Mthod for 2D-Discrtization
Finit lmnt discrtization of Laplac and Poisson quations Yashwanth Tummala Tutor: Prof S.Mittal 1 Outlin Finit Elmnt Mthod for 1D Introduction to Poisson s and Laplac s Equations Finit Elmnt Mthod for 2D-Discrtization
2.3 Matrix Formulation
 23 Matrix Formulation 43 A mor complicatd xampl ariss for a nonlinar systm of diffrntial quations Considr th following xampl Exampl 23 x y + x( x 2 y 2 y x + y( x 2 y 2 (233 Transforming to polar coordinats,
23 Matrix Formulation 43 A mor complicatd xampl ariss for a nonlinar systm of diffrntial quations Considr th following xampl Exampl 23 x y + x( x 2 y 2 y x + y( x 2 y 2 (233 Transforming to polar coordinats,
Einstein Equations for Tetrad Fields
 Apiron, Vol 13, No, Octobr 006 6 Einstin Equations for Ttrad Filds Ali Rıza ŞAHİN, R T L Istanbul (Turky) Evry mtric tnsor can b xprssd by th innr product of ttrad filds W prov that Einstin quations for
Apiron, Vol 13, No, Octobr 006 6 Einstin Equations for Ttrad Filds Ali Rıza ŞAHİN, R T L Istanbul (Turky) Evry mtric tnsor can b xprssd by th innr product of ttrad filds W prov that Einstin quations for
On the Hamiltonian of a Multi-Electron Atom
 On th Hamiltonian of a Multi-Elctron Atom Austn Gronr Drxl Univrsity Philadlphia, PA Octobr 29, 2010 1 Introduction In this papr, w will xhibit th procss of achiving th Hamiltonian for an lctron gas. Making
On th Hamiltonian of a Multi-Elctron Atom Austn Gronr Drxl Univrsity Philadlphia, PA Octobr 29, 2010 1 Introduction In this papr, w will xhibit th procss of achiving th Hamiltonian for an lctron gas. Making
As the matrix of operator B is Hermitian so its eigenvalues must be real. It only remains to diagonalize the minor M 11 of matrix B.
 7636S ADVANCED QUANTUM MECHANICS Solutions Spring. Considr a thr dimnsional kt spac. If a crtain st of orthonormal kts, say, and 3 ar usd as th bas kts, thn th oprators A and B ar rprsntd by a b A a and
7636S ADVANCED QUANTUM MECHANICS Solutions Spring. Considr a thr dimnsional kt spac. If a crtain st of orthonormal kts, say, and 3 ar usd as th bas kts, thn th oprators A and B ar rprsntd by a b A a and
ME 321 Kinematics and Dynamics of Machines S. Lambert Winter 2002
 3.4 Forc Analysis of Linkas An undrstandin of forc analysis of linkas is rquird to: Dtrmin th raction forcs on pins, tc. as a consqunc of a spcifid motion (don t undrstimat th sinificanc of dynamic or
3.4 Forc Analysis of Linkas An undrstandin of forc analysis of linkas is rquird to: Dtrmin th raction forcs on pins, tc. as a consqunc of a spcifid motion (don t undrstimat th sinificanc of dynamic or
Coupled Pendulums. Two normal modes.
 Tim Dpndnt Two Stat Problm Coupld Pndulums Wak spring Two normal mods. No friction. No air rsistanc. Prfct Spring Start Swinging Som tim latr - swings with full amplitud. stationary M +n L M +m Elctron
Tim Dpndnt Two Stat Problm Coupld Pndulums Wak spring Two normal mods. No friction. No air rsistanc. Prfct Spring Start Swinging Som tim latr - swings with full amplitud. stationary M +n L M +m Elctron
AS 5850 Finite Element Analysis
 AS 5850 Finit Elmnt Analysis Two-Dimnsional Linar Elasticity Instructor Prof. IIT Madras Equations of Plan Elasticity - 1 displacmnt fild strain- displacmnt rlations (infinitsimal strain) in matrix form
AS 5850 Finit Elmnt Analysis Two-Dimnsional Linar Elasticity Instructor Prof. IIT Madras Equations of Plan Elasticity - 1 displacmnt fild strain- displacmnt rlations (infinitsimal strain) in matrix form
SECTION where P (cos θ, sin θ) and Q(cos θ, sin θ) are polynomials in cos θ and sin θ, provided Q is never equal to zero.
 and Q(cos θ, sin θ) are polynomials in cos θ and sin θ, provided Q is never equal to zero.") SETION 6. 57 6. Evaluation of Dfinit Intgrals Exampl 6.6 W hav usd dfinit intgrals to valuat contour intgrals. It may com as a surpris to larn that contour intgrals and rsidus can b usd to valuat crtain
SETION 6. 57 6. Evaluation of Dfinit Intgrals Exampl 6.6 W hav usd dfinit intgrals to valuat contour intgrals. It may com as a surpris to larn that contour intgrals and rsidus can b usd to valuat crtain
22/ Breakdown of the Born-Oppenheimer approximation. Selection rules for rotational-vibrational transitions. P, R branches.
 Subjct Chmistry Papr No and Titl Modul No and Titl Modul Tag 8/ Physical Spctroscopy / Brakdown of th Born-Oppnhimr approximation. Slction ruls for rotational-vibrational transitions. P, R branchs. CHE_P8_M
Subjct Chmistry Papr No and Titl Modul No and Titl Modul Tag 8/ Physical Spctroscopy / Brakdown of th Born-Oppnhimr approximation. Slction ruls for rotational-vibrational transitions. P, R branchs. CHE_P8_M
NEW APPLICATIONS OF THE ABEL-LIOUVILLE FORMULA
 NE APPLICATIONS OF THE ABEL-LIOUVILLE FORMULA Mirca I CÎRNU Ph Dp o Mathmatics III Faculty o Applid Scincs Univrsity Polithnica o Bucharst Cirnumirca @yahoocom Abstract In a rcnt papr [] 5 th indinit intgrals
NE APPLICATIONS OF THE ABEL-LIOUVILLE FORMULA Mirca I CÎRNU Ph Dp o Mathmatics III Faculty o Applid Scincs Univrsity Polithnica o Bucharst Cirnumirca @yahoocom Abstract In a rcnt papr [] 5 th indinit intgrals
A Propagating Wave Packet Group Velocity Dispersion
 Lctur 8 Phys 375 A Propagating Wav Packt Group Vlocity Disprsion Ovrviw and Motivation: In th last lctur w lookd at a localizd solution t) to th 1D fr-particl Schrödingr quation (SE) that corrsponds to
Lctur 8 Phys 375 A Propagating Wav Packt Group Vlocity Disprsion Ovrviw and Motivation: In th last lctur w lookd at a localizd solution t) to th 1D fr-particl Schrödingr quation (SE) that corrsponds to
Massachusetts Institute of Technology Department of Mechanical Engineering
 Massachustts Institut of Tchnolog Dpartmnt of Mchanical Enginring. Introduction to Robotics Mid-Trm Eamination Novmbr, 005 :0 pm 4:0 pm Clos-Book. Two shts of nots ar allowd. Show how ou arrivd at our
Massachustts Institut of Tchnolog Dpartmnt of Mchanical Enginring. Introduction to Robotics Mid-Trm Eamination Novmbr, 005 :0 pm 4:0 pm Clos-Book. Two shts of nots ar allowd. Show how ou arrivd at our
A. Limits and Horizontal Asymptotes ( ) f x f x. f x. x "±# ( ).
 f x f x. f x. x ±# ( ).") A. Limits and Horizontal Asymptots What you ar finding: You can b askd to find lim x "a H.A.) problm is asking you find lim x "# and lim x "$#. or lim x "±#. Typically, a horizontal asymptot algbraically,
A. Limits and Horizontal Asymptots What you ar finding: You can b askd to find lim x "a H.A.) problm is asking you find lim x "# and lim x "$#. or lim x "±#. Typically, a horizontal asymptot algbraically,
Recall that by Theorems 10.3 and 10.4 together provide us the estimate o(n2 ), S(q) q 9, q=1
, S(q) q 9, q=1") Chaptr 11 Th singular sris Rcall that by Thorms 10 and 104 togthr provid us th stimat 9 4 n 2 111 Rn = SnΓ 2 + on2, whr th singular sris Sn was dfind in Chaptr 10 as Sn = q=1 Sq q 9, with Sq = 1 a q gcda,q=1
Chaptr 11 Th singular sris Rcall that by Thorms 10 and 104 togthr provid us th stimat 9 4 n 2 111 Rn = SnΓ 2 + on2, whr th singular sris Sn was dfind in Chaptr 10 as Sn = q=1 Sq q 9, with Sq = 1 a q gcda,q=1
Lecture 28 Title: Diatomic Molecule : Vibrational and Rotational spectra
 Lctur 8 Titl: Diatomic Molcul : Vibrational and otational spctra Pag- In this lctur w will undrstand th molcular vibrational and rotational spctra of diatomic molcul W will start with th Hamiltonian for
Lctur 8 Titl: Diatomic Molcul : Vibrational and otational spctra Pag- In this lctur w will undrstand th molcular vibrational and rotational spctra of diatomic molcul W will start with th Hamiltonian for
Lorentz force rotor formulation.
 Lorntz forc rotor formulation. Ptr Joot ptr.joot@gmail.com March 18, 2009. Last Rvision: Dat : 2009/03/2321 : 19 : 46 Contnts 1 Motivation. 1 2 In trms of GA. 1 2.1 Omga bivctor............................
Lorntz forc rotor formulation. Ptr Joot ptr.joot@gmail.com March 18, 2009. Last Rvision: Dat : 2009/03/2321 : 19 : 46 Contnts 1 Motivation. 1 2 In trms of GA. 1 2.1 Omga bivctor............................
MAE4700/5700 Finite Element Analysis for Mechanical and Aerospace Design
 MAE4700/5700 Finit Elmnt Analysis for Mchanical and Arospac Dsign Cornll Univrsity, Fall 2009 Nicholas Zabaras Matrials Procss Dsign and Control Laboratory Sibly School of Mchanical and Arospac Enginring
MAE4700/5700 Finit Elmnt Analysis for Mchanical and Arospac Dsign Cornll Univrsity, Fall 2009 Nicholas Zabaras Matrials Procss Dsign and Control Laboratory Sibly School of Mchanical and Arospac Enginring
GEOMETRICAL PHENOMENA IN THE PHYSICS OF SUBATOMIC PARTICLES. Eduard N. Klenov* Rostov-on-Don, Russia
 GEOMETRICAL PHENOMENA IN THE PHYSICS OF SUBATOMIC PARTICLES Eduard N. Klnov* Rostov-on-Don, Russia Th articl considrs phnomnal gomtry figurs bing th carrirs of valu spctra for th pairs of th rmaining additiv
GEOMETRICAL PHENOMENA IN THE PHYSICS OF SUBATOMIC PARTICLES Eduard N. Klnov* Rostov-on-Don, Russia Th articl considrs phnomnal gomtry figurs bing th carrirs of valu spctra for th pairs of th rmaining additiv
u 3 = u 3 (x 1, x 2, x 3 )
") Lctur 23: Curvilinar Coordinats (RHB 8.0 It is oftn convnint to work with variabls othr than th Cartsian coordinats x i ( = x, y, z. For xampl in Lctur 5 w mt sphrical polar and cylindrical polar coordinats.
Lctur 23: Curvilinar Coordinats (RHB 8.0 It is oftn convnint to work with variabls othr than th Cartsian coordinats x i ( = x, y, z. For xampl in Lctur 5 w mt sphrical polar and cylindrical polar coordinats.
perm4 A cnt 0 for for if A i 1 A i cnt cnt 1 cnt i j. j k. k l. i k. j l. i l
 h 4D, 4th Rank, Antisytric nsor and th 4D Equivalnt to th Cross Product or Mor Fun with nsors!!! Richard R Shiffan Digital Graphics Assoc 8 Dunkirk Av LA, Ca 95 rrs@isidu his docunt dscribs th four dinsional
h 4D, 4th Rank, Antisytric nsor and th 4D Equivalnt to th Cross Product or Mor Fun with nsors!!! Richard R Shiffan Digital Graphics Assoc 8 Dunkirk Av LA, Ca 95 rrs@isidu his docunt dscribs th four dinsional
Middle East Technical University Department of Mechanical Engineering ME 413 Introduction to Finite Element Analysis
 Middl East Tchnical Univrsity Dpartmnt of Mchanical Enginring ME 4 Introduction to Finit Elmnt Analysis Chaptr 4 Trusss, Bams and Frams Ths nots ar prpard by Dr. Cünyt Srt http://www.m.mtu.du.tr/popl/cunyt
Middl East Tchnical Univrsity Dpartmnt of Mchanical Enginring ME 4 Introduction to Finit Elmnt Analysis Chaptr 4 Trusss, Bams and Frams Ths nots ar prpard by Dr. Cünyt Srt http://www.m.mtu.du.tr/popl/cunyt
nd the particular orthogonal trajectory from the family of orthogonal trajectories passing through point (0; 1).
.") Eamn EDO. Givn th family of curvs y + C nd th particular orthogonal trajctory from th family of orthogonal trajctoris passing through point (0; ). Solution: In th rst plac, lt us calculat th di rntial
Eamn EDO. Givn th family of curvs y + C nd th particular orthogonal trajctory from th family of orthogonal trajctoris passing through point (0; ). Solution: In th rst plac, lt us calculat th di rntial
VSMN30 FINITA ELEMENTMETODEN - DUGGA
 VSMN3 FINITA ELEMENTMETODEN - DUGGA 1-11-6 kl. 8.-1. Maximum points: 4, Rquird points to pass: Assistanc: CALFEM manual and calculator Problm 1 ( 8p ) 8 7 6 5 y 4 1. m x 1 3 1. m Th isotropic two-dimnsional
VSMN3 FINITA ELEMENTMETODEN - DUGGA 1-11-6 kl. 8.-1. Maximum points: 4, Rquird points to pass: Assistanc: CALFEM manual and calculator Problm 1 ( 8p ) 8 7 6 5 y 4 1. m x 1 3 1. m Th isotropic two-dimnsional
ECE602 Exam 1 April 5, You must show ALL of your work for full credit.
 ECE62 Exam April 5, 27 Nam: Solution Scor: / This xam is closd-book. You must show ALL of your work for full crdit. Plas rad th qustions carfully. Plas chck your answrs carfully. Calculators may NOT b
ECE62 Exam April 5, 27 Nam: Solution Scor: / This xam is closd-book. You must show ALL of your work for full crdit. Plas rad th qustions carfully. Plas chck your answrs carfully. Calculators may NOT b
DSP-First, 2/e. LECTURE # CH2-3 Complex Exponentials & Complex Numbers TLH MODIFIED. Aug , JH McClellan & RW Schafer
 DSP-First, / TLH MODIFIED LECTURE # CH-3 Complx Exponntials & Complx Numbrs Aug 016 1 READING ASSIGNMENTS This Lctur: Chaptr, Scts. -3 to -5 Appndix A: Complx Numbrs Complx Exponntials Aug 016 LECTURE
DSP-First, / TLH MODIFIED LECTURE # CH-3 Complx Exponntials & Complx Numbrs Aug 016 1 READING ASSIGNMENTS This Lctur: Chaptr, Scts. -3 to -5 Appndix A: Complx Numbrs Complx Exponntials Aug 016 LECTURE
Supplementary Materials
 6 Supplmntary Matrials APPENDIX A PHYSICAL INTERPRETATION OF FUEL-RATE-SPEED FUNCTION A truck running on a road with grad/slop θ positiv if moving up and ngativ if moving down facs thr rsistancs: arodynamic
6 Supplmntary Matrials APPENDIX A PHYSICAL INTERPRETATION OF FUEL-RATE-SPEED FUNCTION A truck running on a road with grad/slop θ positiv if moving up and ngativ if moving down facs thr rsistancs: arodynamic
Laboratory work # 8 (14) EXPERIMENTAL ESTIMATION OF CRITICAL STRESSES IN STRINGER UNDER COMPRESSION
 EXPERIMENTAL ESTIMATION OF CRITICAL STRESSES IN STRINGER UNDER COMPRESSION") Laboratory wor # 8 (14) XPRIMNTAL STIMATION OF CRITICAL STRSSS IN STRINGR UNDR COMPRSSION At action of comprssing ffort on a bar (column, rod, and stringr) two inds of loss of stability ar possibl: 1)
Laboratory wor # 8 (14) XPRIMNTAL STIMATION OF CRITICAL STRSSS IN STRINGR UNDR COMPRSSION At action of comprssing ffort on a bar (column, rod, and stringr) two inds of loss of stability ar possibl: 1)
1973 AP Calculus AB: Section I
 97 AP Calculus AB: Sction I 9 Minuts No Calculator Not: In this amination, ln dnots th natural logarithm of (that is, logarithm to th bas ).. ( ) d= + C 6 + C + C + C + C. If f ( ) = + + + and ( ), g=
97 AP Calculus AB: Sction I 9 Minuts No Calculator Not: In this amination, ln dnots th natural logarithm of (that is, logarithm to th bas ).. ( ) d= + C 6 + C + C + C + C. If f ( ) = + + + and ( ), g=
Fourier Transforms and the Wave Equation. Key Mathematics: More Fourier transform theory, especially as applied to solving the wave equation.
 Lur 7 Fourir Transforms and th Wav Euation Ovrviw and Motivation: W first discuss a fw faturs of th Fourir transform (FT), and thn w solv th initial-valu problm for th wav uation using th Fourir transform
Lur 7 Fourir Transforms and th Wav Euation Ovrviw and Motivation: W first discuss a fw faturs of th Fourir transform (FT), and thn w solv th initial-valu problm for th wav uation using th Fourir transform
Math 102. Rumbos Spring Solutions to Assignment #8. Solution: The matrix, A, corresponding to the system in (1) is
 is") Math 12. Rumbos Spring 218 1 Solutions to Assignmnt #8 1. Construct a fundamntal matrix for th systm { ẋ 2y ẏ x + y. (1 Solution: Th matrix, A, corrsponding to th systm in (1 is 2 A. (2 1 1 Th charactristic
Math 12. Rumbos Spring 218 1 Solutions to Assignmnt #8 1. Construct a fundamntal matrix for th systm { ẋ 2y ẏ x + y. (1 Solution: Th matrix, A, corrsponding to th systm in (1 is 2 A. (2 1 1 Th charactristic
Middle East Technical University Department of Mechanical Engineering ME 413 Introduction to Finite Element Analysis
 Middl East Tchnical Univrsity Dpartmnt of Mchanical Enginring ME Introduction to Finit Elmnt Analysis Chaptr 5 Two-Dimnsional Formulation Ths nots ar prpard by Dr. Cünyt Srt http://www.m.mtu.du.tr/popl/cunyt
Middl East Tchnical Univrsity Dpartmnt of Mchanical Enginring ME Introduction to Finit Elmnt Analysis Chaptr 5 Two-Dimnsional Formulation Ths nots ar prpard by Dr. Cünyt Srt http://www.m.mtu.du.tr/popl/cunyt
Higher order derivatives
 Robrto s Nots on Diffrntial Calculus Chaptr 4: Basic diffrntiation ruls Sction 7 Highr ordr drivativs What you nd to know alrady: Basic diffrntiation ruls. What you can larn hr: How to rpat th procss of
Robrto s Nots on Diffrntial Calculus Chaptr 4: Basic diffrntiation ruls Sction 7 Highr ordr drivativs What you nd to know alrady: Basic diffrntiation ruls. What you can larn hr: How to rpat th procss of
ELECTRON-MUON SCATTERING
 ELECTRON-MUON SCATTERING ABSTRACT Th lctron charg is considrd to b distributd or xtndd in spac. Th diffrntial of th lctron charg is st qual to a function of lctron charg coordinats multiplid by a four-dimnsional
ELECTRON-MUON SCATTERING ABSTRACT Th lctron charg is considrd to b distributd or xtndd in spac. Th diffrntial of th lctron charg is st qual to a function of lctron charg coordinats multiplid by a four-dimnsional
Introduction to the quantum theory of matter and Schrödinger s equation
 Introduction to th quantum thory of mattr and Schrödingr s quation Th quantum thory of mattr assums that mattr has two naturs: a particl natur and a wa natur. Th particl natur is dscribd by classical physics
Introduction to th quantum thory of mattr and Schrödingr s quation Th quantum thory of mattr assums that mattr has two naturs: a particl natur and a wa natur. Th particl natur is dscribd by classical physics
Middle East Technical University Department of Mechanical Engineering ME 413 Introduction to Finite Element Analysis
 Middl East Tchnical Univrsity Dpartmnt of Mchanical Enginring ME 43 Introduction to Finit Elmnt Analysis Chaptr 3 Computr Implmntation of D FEM Ths nots ar prpard by Dr. Cünyt Srt http://www.m.mtu.du.tr/popl/cunyt
Middl East Tchnical Univrsity Dpartmnt of Mchanical Enginring ME 43 Introduction to Finit Elmnt Analysis Chaptr 3 Computr Implmntation of D FEM Ths nots ar prpard by Dr. Cünyt Srt http://www.m.mtu.du.tr/popl/cunyt
COHORT MBA. Exponential function. MATH review (part2) by Lucian Mitroiu. The LOG and EXP functions. Properties: e e. lim.
 by Lucian Mitroiu. The LOG and EXP functions. Properties: e e. lim.") MTH rviw part b Lucian Mitroiu Th LOG and EXP functions Th ponntial function p : R, dfind as Proprtis: lim > lim p Eponntial function Y 8 6 - -8-6 - - X Th natural logarithm function ln in US- log: function
MTH rviw part b Lucian Mitroiu Th LOG and EXP functions Th ponntial function p : R, dfind as Proprtis: lim > lim p Eponntial function Y 8 6 - -8-6 - - X Th natural logarithm function ln in US- log: function
1 Isoparametric Concept
 UNIVERSITY OF CALIFORNIA BERKELEY Dpartmnt of Civil Enginring Spring 06 Structural Enginring, Mchanics and Matrials Profssor: S. Govindj Nots on D isoparamtric lmnts Isoparamtric Concpt Th isoparamtric
UNIVERSITY OF CALIFORNIA BERKELEY Dpartmnt of Civil Enginring Spring 06 Structural Enginring, Mchanics and Matrials Profssor: S. Govindj Nots on D isoparamtric lmnts Isoparamtric Concpt Th isoparamtric
High Energy Physics. Lecture 5 The Passage of Particles through Matter
 High Enrgy Physics Lctur 5 Th Passag of Particls through Mattr 1 Introduction In prvious lcturs w hav sn xampls of tracks lft by chargd particls in passing through mattr. Such tracks provid som of th most
High Enrgy Physics Lctur 5 Th Passag of Particls through Mattr 1 Introduction In prvious lcturs w hav sn xampls of tracks lft by chargd particls in passing through mattr. Such tracks provid som of th most
10. The Discrete-Time Fourier Transform (DTFT)
") Th Discrt-Tim Fourir Transform (DTFT Dfinition of th discrt-tim Fourir transform Th Fourir rprsntation of signals plays an important rol in both continuous and discrt signal procssing In this sction w
Th Discrt-Tim Fourir Transform (DTFT Dfinition of th discrt-tim Fourir transform Th Fourir rprsntation of signals plays an important rol in both continuous and discrt signal procssing In this sction w
Function Spaces. a x 3. (Letting x = 1 =)) a(0) + b + c (1) = 0. Row reducing the matrix. b 1. e 4 3. e 9. >: (x = 1 =)) a(0) + b + c (1) = 0
) a(0) + b + c (1) = 0. Row reducing the matrix. b 1. e 4 3. e 9. >: (x = 1 =)) a(0) + b + c (1) = 0") unction Spacs Prrquisit: Sction 4.7, Coordinatization n this sction, w apply th tchniqus of Chaptr 4 to vctor spacs whos lmnts ar functions. Th vctor spacs P n and P ar familiar xampls of such spacs. Othr
unction Spacs Prrquisit: Sction 4.7, Coordinatization n this sction, w apply th tchniqus of Chaptr 4 to vctor spacs whos lmnts ar functions. Th vctor spacs P n and P ar familiar xampls of such spacs. Othr
Slide 1. Slide 2. Slide 3 DIGITAL SIGNAL PROCESSING CLASSIFICATION OF SIGNALS
 Slid DIGITAL SIGAL PROCESSIG UIT I DISCRETE TIME SIGALS AD SYSTEM Slid Rviw of discrt-tim signals & systms Signal:- A signal is dfind as any physical quantity that varis with tim, spac or any othr indpndnt
Slid DIGITAL SIGAL PROCESSIG UIT I DISCRETE TIME SIGALS AD SYSTEM Slid Rviw of discrt-tim signals & systms Signal:- A signal is dfind as any physical quantity that varis with tim, spac or any othr indpndnt
INC 693, 481 Dynamics System and Modelling: The Language of Bound Graphs Dr.-Ing. Sudchai Boonto Assistant Professor
 INC 693, 48 Dynamics Systm and Modlling: Th Languag o Bound Graphs Dr.-Ing. Sudchai Boonto Assistant Prossor Dpartmnt o Control Systm and Instrumntation Enginring King Mongkut s Unnivrsity o Tchnology
INC 693, 48 Dynamics Systm and Modlling: Th Languag o Bound Graphs Dr.-Ing. Sudchai Boonto Assistant Prossor Dpartmnt o Control Systm and Instrumntation Enginring King Mongkut s Unnivrsity o Tchnology
(Upside-Down o Direct Rotation) β - Numbers
 β - Numbers") Amrican Journal of Mathmatics and Statistics 014, 4(): 58-64 DOI: 10593/jajms0140400 (Upsid-Down o Dirct Rotation) β - Numbrs Ammar Sddiq Mahmood 1, Shukriyah Sabir Ali,* 1 Dpartmnt of Mathmatics, Collg
Amrican Journal of Mathmatics and Statistics 014, 4(): 58-64 DOI: 10593/jajms0140400 (Upsid-Down o Dirct Rotation) β - Numbrs Ammar Sddiq Mahmood 1, Shukriyah Sabir Ali,* 1 Dpartmnt of Mathmatics, Collg
16. Electromagnetics and vector elements (draft, under construction)
") 16. Elctromagntics (draft)... 1 16.1 Introduction... 1 16.2 Paramtric coordinats... 2 16.3 Edg Basd (Vctor) Finit Elmnts... 4 16.4 Whitny vctor lmnts... 5 16.5 Wak Form... 8 16.6 Vctor lmnt matrics...
16. Elctromagntics (draft)... 1 16.1 Introduction... 1 16.2 Paramtric coordinats... 2 16.3 Edg Basd (Vctor) Finit Elmnts... 4 16.4 Whitny vctor lmnts... 5 16.5 Wak Form... 8 16.6 Vctor lmnt matrics...
Direct Approach for Discrete Systems One-Dimensional Elements
 CONTINUUM & FINITE ELEMENT METHOD Dirct Approach or Discrt Systms On-Dimnsional Elmnts Pro. Song Jin Par Mchanical Enginring, POSTECH Dirct Approach or Discrt Systms Dirct approach has th ollowing aturs:
CONTINUUM & FINITE ELEMENT METHOD Dirct Approach or Discrt Systms On-Dimnsional Elmnts Pro. Song Jin Par Mchanical Enginring, POSTECH Dirct Approach or Discrt Systms Dirct approach has th ollowing aturs:
Homotopy perturbation technique
 Comput. Mthods Appl. Mch. Engrg. 178 (1999) 257±262 www.lsvir.com/locat/cma Homotopy prturbation tchniqu Ji-Huan H 1 Shanghai Univrsity, Shanghai Institut of Applid Mathmatics and Mchanics, Shanghai 272,
Comput. Mthods Appl. Mch. Engrg. 178 (1999) 257±262 www.lsvir.com/locat/cma Homotopy prturbation tchniqu Ji-Huan H 1 Shanghai Univrsity, Shanghai Institut of Applid Mathmatics and Mchanics, Shanghai 272,
Introduction to Arithmetic Geometry Fall 2013 Lecture #20 11/14/2013
 18.782 Introduction to Arithmtic Gomtry Fall 2013 Lctur #20 11/14/2013 20.1 Dgr thorm for morphisms of curvs Lt us rstat th thorm givn at th nd of th last lctur, which w will now prov. Thorm 20.1. Lt φ:
18.782 Introduction to Arithmtic Gomtry Fall 2013 Lctur #20 11/14/2013 20.1 Dgr thorm for morphisms of curvs Lt us rstat th thorm givn at th nd of th last lctur, which w will now prov. Thorm 20.1. Lt φ:
5.80 Small-Molecule Spectroscopy and Dynamics
 MIT OpnCoursWar http://ocw.mit.du 5.80 Small-Molcul Spctroscopy and Dynamics Fall 008 For information about citing ths matrials or our Trms of Us, visit: http://ocw.mit.du/trms. Lctur # 3 Supplmnt Contnts
MIT OpnCoursWar http://ocw.mit.du 5.80 Small-Molcul Spctroscopy and Dynamics Fall 008 For information about citing ths matrials or our Trms of Us, visit: http://ocw.mit.du/trms. Lctur # 3 Supplmnt Contnts
Schrodinger Equation in 3-d
 Schrodingr Equation in 3-d ψ( xyz,, ) ψ( xyz,, ) ψ( xyz,, ) + + + Vxyz (,, ) ψ( xyz,, ) = Eψ( xyz,, ) m x y z p p p x y + + z m m m + V = E p m + V = E E + k V = E Infinit Wll in 3-d V = x > L, y > L,
Schrodingr Equation in 3-d ψ( xyz,, ) ψ( xyz,, ) ψ( xyz,, ) + + + Vxyz (,, ) ψ( xyz,, ) = Eψ( xyz,, ) m x y z p p p x y + + z m m m + V = E p m + V = E E + k V = E Infinit Wll in 3-d V = x > L, y > L,
2. Background Material
 S. Blair Sptmbr 3, 003 4. Background Matrial Th rst of this cours dals with th gnration, modulation, propagation, and ction of optical radiation. As such, bic background in lctromagntics and optics nds
S. Blair Sptmbr 3, 003 4. Background Matrial Th rst of this cours dals with th gnration, modulation, propagation, and ction of optical radiation. As such, bic background in lctromagntics and optics nds
Forces. Quantum ElectroDynamics. α = = We have now:
 W hav now: Forcs Considrd th gnral proprtis of forcs mdiatd by xchang (Yukawa potntial); Examind consrvation laws which ar obyd by (som) forcs. W will nxt look at thr forcs in mor dtail: Elctromagntic
W hav now: Forcs Considrd th gnral proprtis of forcs mdiatd by xchang (Yukawa potntial); Examind consrvation laws which ar obyd by (som) forcs. W will nxt look at thr forcs in mor dtail: Elctromagntic
3 Finite Element Parametric Geometry
 3 Finit Elmnt Paramtric Gomtry 3. Introduction Th intgral of a matrix is th matrix containing th intgral of ach and vry on of its original componnts. Practical finit lmnt analysis rquirs intgrating matrics,
3 Finit Elmnt Paramtric Gomtry 3. Introduction Th intgral of a matrix is th matrix containing th intgral of ach and vry on of its original componnts. Practical finit lmnt analysis rquirs intgrating matrics,
Classical Magnetic Dipole
 Lctur 18 1 Classical Magntic Dipol In gnral, a particl of mass m and charg q (not ncssarily a point charg), w hav q g L m whr g is calld th gyromagntic ratio, which accounts for th ffcts of non-point charg
Lctur 18 1 Classical Magntic Dipol In gnral, a particl of mass m and charg q (not ncssarily a point charg), w hav q g L m whr g is calld th gyromagntic ratio, which accounts for th ffcts of non-point charg
Propositional Logic. Combinatorial Problem Solving (CPS) Albert Oliveras Enric Rodríguez-Carbonell. May 17, 2018
 Albert Oliveras Enric Rodríguez-Carbonell. May 17, 2018") Propositional Logic Combinatorial Problm Solving (CPS) Albrt Olivras Enric Rodríguz-Carbonll May 17, 2018 Ovrviw of th sssion Dfinition of Propositional Logic Gnral Concpts in Logic Rduction to SAT CNFs
Propositional Logic Combinatorial Problm Solving (CPS) Albrt Olivras Enric Rodríguz-Carbonll May 17, 2018 Ovrviw of th sssion Dfinition of Propositional Logic Gnral Concpts in Logic Rduction to SAT CNFs
VII. Quantum Entanglement
 VII. Quantum Entanglmnt Quantum ntanglmnt is a uniqu stat of quantum suprposition. It has bn studid mainly from a scintific intrst as an vidnc of quantum mchanics. Rcntly, it is also bing studid as a basic
VII. Quantum Entanglmnt Quantum ntanglmnt is a uniqu stat of quantum suprposition. It has bn studid mainly from a scintific intrst as an vidnc of quantum mchanics. Rcntly, it is also bing studid as a basic
Bifurcation Theory. , a stationary point, depends on the value of α. At certain values
 Dnamic Macroconomic Thor Prof. Thomas Lux Bifurcation Thor Bifurcation: qualitativ chang in th natur of th solution occurs if a paramtr passs through a critical point bifurcation or branch valu. Local
Dnamic Macroconomic Thor Prof. Thomas Lux Bifurcation Thor Bifurcation: qualitativ chang in th natur of th solution occurs if a paramtr passs through a critical point bifurcation or branch valu. Local
DIFFERENTIAL EQUATION
 MD DIFFERENTIAL EQUATION Sllabus : Ordinar diffrntial quations, thir ordr and dgr. Formation of diffrntial quations. Solution of diffrntial quations b th mthod of sparation of variabls, solution of homognous
MD DIFFERENTIAL EQUATION Sllabus : Ordinar diffrntial quations, thir ordr and dgr. Formation of diffrntial quations. Solution of diffrntial quations b th mthod of sparation of variabls, solution of homognous
FINITE ELEMENT ANALYSIS OF A TWO-DIMENSIONAL LINEAR ELASTIC SYSTEMS WITH A PLANE RIGID MOTION
 FINIE ELEMEN ANALYSIS OF A WO-DIMENSIONAL LINEAR ELASIC SYSEMS WIH A PLANE RIGID MOION S. LASE, C. DĂNĂŞEL, M.L. SCUARU, M. MIHĂLCICĂ RANSILANIA Univrsity of Braşov, RO-500036, B-dul Eroilor, 9, Romania,
FINIE ELEMEN ANALYSIS OF A WO-DIMENSIONAL LINEAR ELASIC SYSEMS WIH A PLANE RIGID MOION S. LASE, C. DĂNĂŞEL, M.L. SCUARU, M. MIHĂLCICĂ RANSILANIA Univrsity of Braşov, RO-500036, B-dul Eroilor, 9, Romania,
Mathematics. Complex Number rectangular form. Quadratic equation. Quadratic equation. Complex number Functions: sinusoids. Differentiation Integration
 Mathmatics Compl numbr Functions: sinusoids Sin function, cosin function Diffrntiation Intgration Quadratic quation Quadratic quations: a b c 0 Solution: b b 4ac a Eampl: 1 0 a= b=- c=1 4 1 1or 1 1 Quadratic
Mathmatics Compl numbr Functions: sinusoids Sin function, cosin function Diffrntiation Intgration Quadratic quation Quadratic quations: a b c 0 Solution: b b 4ac a Eampl: 1 0 a= b=- c=1 4 1 1or 1 1 Quadratic
Math 34A. Final Review
 Math A Final Rviw 1) Us th graph of y10 to find approimat valus: a) 50 0. b) y (0.65) solution for part a) first writ an quation: 50 0. now tak th logarithm of both sids: log() log(50 0. ) pand th right
Math A Final Rviw 1) Us th graph of y10 to find approimat valus: a) 50 0. b) y (0.65) solution for part a) first writ an quation: 50 0. now tak th logarithm of both sids: log() log(50 0. ) pand th right
There is an arbitrary overall complex phase that could be added to A, but since this makes no difference we set it to zero and choose A real.
 Midtrm #, Physics 37A, Spring 07. Writ your rsponss blow or on xtra pags. Show your work, and tak car to xplain what you ar doing; partial crdit will b givn for incomplt answrs that dmonstrat som concptual
Midtrm #, Physics 37A, Spring 07. Writ your rsponss blow or on xtra pags. Show your work, and tak car to xplain what you ar doing; partial crdit will b givn for incomplt answrs that dmonstrat som concptual
General Notes About 2007 AP Physics Scoring Guidelines
 AP PHYSICS C: ELECTRICITY AND MAGNETISM 2007 SCORING GUIDELINES Gnral Nots About 2007 AP Physics Scoring Guidlins 1. Th solutions contain th most common mthod of solving th fr-rspons qustions and th allocation
AP PHYSICS C: ELECTRICITY AND MAGNETISM 2007 SCORING GUIDELINES Gnral Nots About 2007 AP Physics Scoring Guidlins 1. Th solutions contain th most common mthod of solving th fr-rspons qustions and th allocation
MATH 319, WEEK 15: The Fundamental Matrix, Non-Homogeneous Systems of Differential Equations
 MATH 39, WEEK 5: Th Fundamntal Matrix, Non-Homognous Systms of Diffrntial Equations Fundamntal Matrics Considr th problm of dtrmining th particular solution for an nsmbl of initial conditions For instanc,
MATH 39, WEEK 5: Th Fundamntal Matrix, Non-Homognous Systms of Diffrntial Equations Fundamntal Matrics Considr th problm of dtrmining th particular solution for an nsmbl of initial conditions For instanc,
Preliminary Fundamentals
 1.0 Introduction Prliminary Fundamntals In all of our prvious work, w assumd a vry simpl modl of th lctromagntic torqu T (or powr) that is rquird in th swing quation to obtain th acclrating torqu. This
1.0 Introduction Prliminary Fundamntals In all of our prvious work, w assumd a vry simpl modl of th lctromagntic torqu T (or powr) that is rquird in th swing quation to obtain th acclrating torqu. This
Principles of Humidity Dalton s law
 Principls of Humidity Dalton s law Air is a mixtur of diffrnt gass. Th main gas componnts ar: Gas componnt volum [%] wight [%] Nitrogn N 2 78,03 75,47 Oxygn O 2 20,99 23,20 Argon Ar 0,93 1,28 Carbon dioxid
Principls of Humidity Dalton s law Air is a mixtur of diffrnt gass. Th main gas componnts ar: Gas componnt volum [%] wight [%] Nitrogn N 2 78,03 75,47 Oxygn O 2 20,99 23,20 Argon Ar 0,93 1,28 Carbon dioxid
Electromagnetic scattering. Graduate Course Electrical Engineering (Communications) 1 st Semester, Sharif University of Technology
 1 st Semester, Sharif University of Technology") Elctromagntic scattring Graduat Cours Elctrical Enginring (Communications) 1 st Smstr, 1388-1389 Sharif Univrsity of Tchnology Contnts of lctur 8 Contnts of lctur 8: Scattring from small dilctric objcts
Elctromagntic scattring Graduat Cours Elctrical Enginring (Communications) 1 st Smstr, 1388-1389 Sharif Univrsity of Tchnology Contnts of lctur 8 Contnts of lctur 8: Scattring from small dilctric objcts
Complex Powers and Logs (5A) Young Won Lim 10/17/13
 Young Won Lim 10/17/13") Complx Powrs and Logs (5A) Copyright (c) 202, 203 Young W. Lim. Prmission is grantd to copy, distribut and/or modify this documnt undr th trms of th GNU Fr Documntation Licns, Vrsion.2 or any latr vrsion
Complx Powrs and Logs (5A) Copyright (c) 202, 203 Young W. Lim. Prmission is grantd to copy, distribut and/or modify this documnt undr th trms of th GNU Fr Documntation Licns, Vrsion.2 or any latr vrsion
Collisions between electrons and ions
 DRAFT 1 Collisions btwn lctrons and ions Flix I. Parra Rudolf Pirls Cntr for Thortical Physics, Unirsity of Oxford, Oxford OX1 NP, UK This rsion is of 8 May 217 1. Introduction Th Fokkr-Planck collision
DRAFT 1 Collisions btwn lctrons and ions Flix I. Parra Rudolf Pirls Cntr for Thortical Physics, Unirsity of Oxford, Oxford OX1 NP, UK This rsion is of 8 May 217 1. Introduction Th Fokkr-Planck collision
5. B To determine all the holes and asymptotes of the equation: y = bdc dced f gbd
 1. First you chck th domain of g x. For this function, x cannot qual zro. Thn w find th D domain of f g x D 3; D 3 0; x Q x x 1 3, x 0 2. Any cosin graph is going to b symmtric with th y-axis as long as
1. First you chck th domain of g x. For this function, x cannot qual zro. Thn w find th D domain of f g x D 3; D 3 0; x Q x x 1 3, x 0 2. Any cosin graph is going to b symmtric with th y-axis as long as
System variables. Basic Modeling Concepts. Basic elements single and. Power = effort x flow. Power = F x v. Power = V x i. Power = T x w.
 Basic Modling Concpts Basic lmnts singl and multiport t dvics Systm variabls v m F V i Powr F x v T w Powr T x w Powr V x i P Q Powr P x Q Powr ort x low Eort & low ar powr variabls Eorts t... Flows...
Basic Modling Concpts Basic lmnts singl and multiport t dvics Systm variabls v m F V i Powr F x v T w Powr T x w Powr V x i P Q Powr P x Q Powr ort x low Eort & low ar powr variabls Eorts t... Flows...
Outline. Thanks to Ian Blockland and Randy Sobie for these slides Lifetimes of Decaying Particles Scattering Cross Sections Fermi s Golden Rule
 Outlin Thanks to Ian Blockland and andy obi for ths slids Liftims of Dcaying Particls cattring Cross ctions Frmi s Goldn ul Physics 424 Lctur 12 Pag 1 Obsrvabls want to rlat xprimntal masurmnts to thortical
Outlin Thanks to Ian Blockland and andy obi for ths slids Liftims of Dcaying Particls cattring Cross ctions Frmi s Goldn ul Physics 424 Lctur 12 Pag 1 Obsrvabls want to rlat xprimntal masurmnts to thortical
Properties of Phase Space Wavefunctions and Eigenvalue Equation of Momentum Dispersion Operator
 Proprtis of Phas Spac Wavfunctions and Eignvalu Equation of Momntum Disprsion Oprator Ravo Tokiniaina Ranaivoson 1, Raolina Andriambololona 2, Hanitriarivo Rakotoson 3 raolinasp@yahoo.fr 1 ;jacqulinraolina@hotmail.com
Proprtis of Phas Spac Wavfunctions and Eignvalu Equation of Momntum Disprsion Oprator Ravo Tokiniaina Ranaivoson 1, Raolina Andriambololona 2, Hanitriarivo Rakotoson 3 raolinasp@yahoo.fr 1 ;jacqulinraolina@hotmail.com
Finite Element Models for Steady Flows of Viscous Incompressible Fluids
 Finit Elmnt Modls for Stad Flows of Viscous Incomprssibl Fluids Rad: Chaptr 10 JN Rdd CONTENTS Govrning Equations of Flows of Incomprssibl Fluids Mid (Vlocit-Prssur) Finit Elmnt Modl Pnalt Function Mthod
Finit Elmnt Modls for Stad Flows of Viscous Incomprssibl Fluids Rad: Chaptr 10 JN Rdd CONTENTS Govrning Equations of Flows of Incomprssibl Fluids Mid (Vlocit-Prssur) Finit Elmnt Modl Pnalt Function Mthod
Exercise 1. Sketch the graph of the following function. (x 2
 Writtn tst: Fbruary 9th, 06 Exrcis. Sktch th graph of th following function fx = x + x, spcifying: domain, possibl asymptots, monotonicity, continuity, local and global maxima or minima, and non-drivability
Writtn tst: Fbruary 9th, 06 Exrcis. Sktch th graph of th following function fx = x + x, spcifying: domain, possibl asymptots, monotonicity, continuity, local and global maxima or minima, and non-drivability