Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
|
|
|
- Blanche Dennis
- 5 years ago
- Views:
Transcription

1 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 Robot Sensors Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
2 Outline of the lesson Definitions of sensor and transducer Classification of transducers Fundamental properties of sensors Position sensors: switches, encoders, potentiometers, Hall-effect sensors Distance measurement: triangulation, time of flight Proximity sensors: ultrasound and infrared sensors Force sensors: strain gauges and force/torque sensors Inertial sensors Bibliographical references: AA.VV., Handbook of Mechatronics, CRC Press LLC, 2002, Cap.19
3 Outline of the lesson Definitions of sensor and transducer Classification of transducers Fundamental properties of sensors Position sensors: switches, encoders, potentiometers, Hall-effect sensors Distance measurement: triangulation, time of flight Proximity sensors: ultrasound and infrared sensors Force sensors: strain gauges and force/torque sensors Inertial sensors Bibliographical references: AA.VV., Handbook of Mechatronics, CRC Press LLC, 2002, Cap.19
4 Definitions of sensor and transducer SENSOR: device sensitive to a physical quantity and able to transform it in a measurable and transferable signal TRANSDUCER: device receiving in input a kind of energy and producing in output energy of a different kind, according to a known relation between input and output, not necessarily for measurement purposes
5 Outline of the lesson Definitions of sensor and transducer Classification of transducers Fundamental properties of sensors Position sensors: switches, encoders, potentiometers, Hall-effect sensors Distance measurement: triangulation, time of flight Proximity sensors: ultrasound and infrared sensors Force sensors: strain gauges and force/torque sensors Inertial sensors Bibliographical references: AA.VV., Handbook of Mechatronics, CRC Press LLC, 2002, Cap.19
6 First classification: Passive sensors: convert directly input energy in output, without external energy sources Active sensors: require external energy (excitation) for energy conversion
7 Classification of transducers based on the kind of input energy, output energy, or external energy Radiant electromagnetic waves: intensity, frequency, polarization and phase Mechanical external parameter of materials: position, velocity, dimension, compliance, force Thermal: temperature, gradient of temperature, heat Electrical: voltage, current, resistivity, capacity Magnetic: field intensity, flow density, permeability Chemical internal structure of materials: concentrations, crystal structure, aggregation state
8 Trasformations of energy in a transducer INPUT ENERGY AUSILIARY ENERGY OUTPUT ENERGY CHEMICAL MAGNETIC ELECTRICAL THERMAL MECHANICAL RADIANT CHEMICAL MAGNETIC ELECTRICAL THERMAL MECHANICAL RADIANT NONE CHEMICAL MAGNETIC ELECTRICAL THERMAL MECHANICAL RADIANT
9 Trasformations of energy in a transducer INPUT ENERGY AUSILIARY ENERGY OUTPUT ENERGY CHEMICAL MAGNETIC ELECTRICAL THERMAL MECHANICAL RADIANT CHEMICAL MAGNETIC ELECTRICAL THERMAL MECHANICAL RADIANT NONE CHEMICAL MAGNETIC ELECTRICAL THERMAL MECHANICAL RADIANT
10 Outline of the lesson Definitions of sensor and transducer Classification of transducers Fundamental properties of sensors Position sensors: switches, encoders, potentiometers, Hall-effect sensors Distance measurement: triangulation, time of flight Proximity sensors: ultrasound and infrared sensors Force sensors: strain gauges and force/torque sensors Inertial sensors Bibliographical references: AA.VV., Handbook of Mechatronics, CRC Press LLC, 2002, Cap.19
11 Fundamental properties of a sensor TRANSFER FUNCTION CALIBRATION LINEARITY HYSTERESIS ACCURACY REPEATABILITY RESOLUTION SENSITIVENESS SENSITIVENESS TO NOISE LIFETIME STABILITY
12 Transfer function The transfer function (or characteristic function) is the relation between the quantity to measure (input to the sensor) and the output of the sensor
13 Calibration The calibration procedure consists of measuring the output of the sensor for known quantities Calibration cycle means a trial that covers the whole working range of the sensor; the trial is divided in two parts, one with increasing values and the other with decreasing values
14 Linearity If the transfer function of a sensor is represented in a linear plot, linearity is a measure of the deviation of the transfer function from a line. The line can be chosen in two ways: 1) the line between the output of the sensor for the input values corresponding to 0% and 100% of its working range 2) the line that best fits the sensor transfer function, with the minimum squares method Linearity is measured as the maximum difference, expressed in % of the maximum value of the transfer function, between the transfer function and the reference line
15 Hysteresis If a sensor has hysteresis, for a same input value, the output may vary, depending on the fact that the input values are increasing or decreasing. Hysteresis is measured as the maximum difference between the two output curves of the sensor during the calibration cycle. It is expressed as a % of the maximum value for the transfer function
16 Example of hysteresis in a tactile sensor
17 Accuracy Accuracy represents the maximum error between the actual value and the value measured by the sensor.
18 Repeatability When a same input value is applies to a sensor, repeatability is a measure of the variability of the output of the sensor.
19 Accuracy and Repeatability accuracy 100 (x m -x v ) / x v x m = average value x v = actual value repeatability dispersion of measures measure YES NO YES NO YES YES
20 Resolution Resolution is the mimimum variation of the input which gives a variation of the output of the sensor.
21 Sensitiveness A small variation of the input causes a corresponding small variation of the output values. Sensitiveness is the ratio between the output variation and the input variation.
22 Noise Noise is the amount of signal in the sensor output which is not given by the input.
23 Stability Stability is the capability of the sensor to keep its working characteristics for a given time (short, medium, long).
24 Other static parameters Response time Input range Cost, size, weight Response in frequency Environmental factors Maximum/minimum temperature Warm-up time Presence of smoke, gas,
25 Dynamic parameters zero drift For instance, due to temperature sensitiveness drift
26 Role of sensors in a robot Perception of the internal state (proprioception) Perception of the external state (exteroception)
27 Role of sensors in a robot Perception of the internal state: measurement of variables internal to the system that are used to control the robot. For instance, joint position.
28 Role of sensors in a robot Perception of the external state: measurement of variables characterizeing the working environment. For instance, distance, proximity, force.
29 Outline of the lesson Definitions of sensor and transducer Classification of transducers Fundamental properties of sensors Position sensors: switches, encoders, potentiometers, Hall-effect sensors Distance measurement: triangulation, time of flight Proximity sensors: ultrasound and infrared sensors Force sensors: strain gauges and force/torque sensors Inertial sensors Bibliographical references: AA.VV., Handbook of Mechatronics, CRC Press LLC, 2002, Cap.19
30 Position sensors Switches Optical encoders Potentiometers Hall-effect sensors


31 Placement of position sensors Behind reducer Before reducer m k d 1 d 1 d k k m d m : joint angular position m : motor ngular position k: motor reduction ratio => The sensor error is reduced of a factor k
32 Switches Simplest position sensors Provide one datum: contact / not contact Application as position sensors: collision sensors in mobile robots whiskers end joint sensors for manipulators
33 Mechanical switches Simplest contact sensors Provide one binary datum: contact / no contact Applications as tactile sensors: impact sensors on mobile robots whiskers endstop sensors for manipulator joints LEVER PRESSED AT CONTACT MECHANICAL CONTACT CLOSING AN ELECTRIC CIRCUIT F If F > T (threshold) V


34 Oral-Joystick: human-machine interface of a feeding assistive device for the severely disabled The Oral-Joystick is a straw-like tube for drinking with a nozzle, connected by a silicone flexible joint, in contact with four cross mechanical switches. The user can push the switches and activate specific functions of the feeding device, only with simple movements of the mouth. Silicone flexible joint Oral-Joystick Nozzle Straw 4 cross mechanical switches

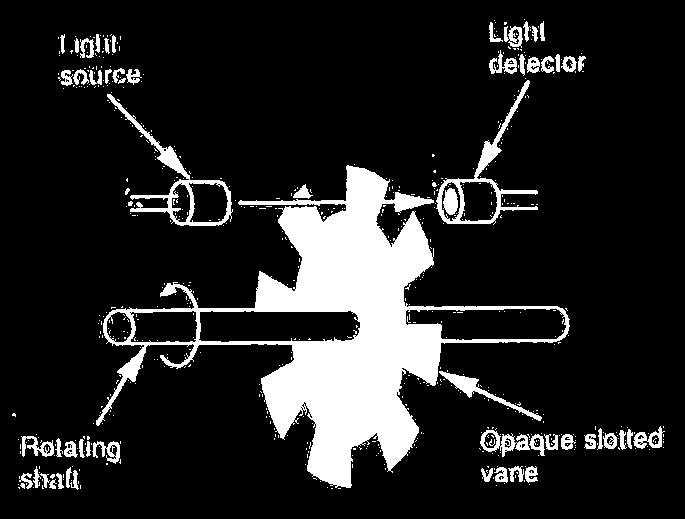
35 Optical encoders

36 Incremental encoder By counting the pulses and by knowing the number of the disk radial lines, it is possible to measure the rotation The frequency of the pulse train is proportional to angular velocity

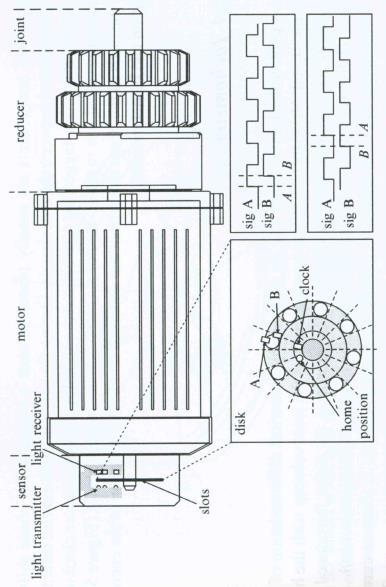
37 Incremental encoder By using 2 photo-switches it is possible to detect the rotation direction, by means of the relation between the phases of their pulse trains A and B are out of phase of ¼ of cycle An increase of A with B=0 correspond to a clockwise rotation An increase of A with B=1 correspond to a counterclockwise rotation
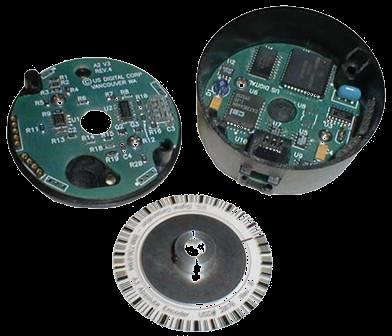
38 Incremental encoder

39 Absolute encoder

40 Absolute encoder k photo-switches k code tracks Binary word of k bits, representing 2 k different disk orientations Angular resolution of 360 /2 k It gives the absolute rotation angle Each position is uniquely determined


41 Absolute encoder


42 Absolute encoder - Gray Code Single transition Decimal Binary Gray Code


43 Encoder


44 Potentiometer Variable resistor L 1 =R 1 L T /R T = =V output L T /V supply
45 Hall-Effect sensors In a conductor where a current i flows, immersed in a magnetic field of intensity B, a voltage V originates in the direction normal both to the current and to the magnetic field. current flow e - B The value of the voltage is proportional to the intensity of the current i and to the intensity of the magnetic field B, while it is inversely proportional to the thickness of the material d: V = R i B / d where R = Hall costant or coefficient.

46 Hall-effect sensors Hall-effect proximity and contact sensor Hall-effect position sensor A permanent magnet generates a magnetic field. The contact with a ferromagnetic object modifies the magnetic field. The Hall effect allows to measure this variation as a voltage

 (Operational range: 0 90 degrees, Resolution: <5")
47 Hall-effect sensors as postion sensors in robotics Detection of angular joint displacements 5+1 Encoders in the Actuation System 15 Embedded Joint Angle Sensors (Hall effect) (Operational range: 0 90 degrees, Resolution: <5 degrees).


48 Hall-effect joint angle sensors Gap

49 Example of application of Hall-effect sensors Sensorized glove for detecting finger position


50 Esempio di applicazione di sensori a effetto Hall Guanto sensorizzato per rilevare la posizione delle dita
51 Outline of the lesson Definitions of sensor and transducer Classification of transducers Fundamental properties of sensors Position sensors: switches, encoders, potentiometers, Hall-effect sensors Distance measurement: triangulation, time of flight Proximity sensors: ultrasound and infrared sensors Force sensors: strain gauges and force/torque sensors Inertial sensors Bibliographical references: AA.VV., Handbook of Mechatronics, CRC Press LLC, 2002, Cap.19
52 Range/distance sensors Range is the distance between the sensor and the object detected. Range sensing is important for object recognition and for robot control. It is often used together with a vision system to reconstruct the 3D model of a scene. The physical principle for range sensing is triangulation, that is the detection of an object from two different points of view, at a known relative distance
53 Distance measurement: triangulation If two imaging devices at a known distance can focus on the same point of an object, then the distance of the object can be measured, by knowing the vergence angles. PASSIVE TRIANGULATION: uses two imaging devices ACTIVE TRIANGULATION : uses one imaging device and a controlled light source
54 Passive triangulation Using the vergence angles

55 Passive triangulation Using the projections of the same point in the two images
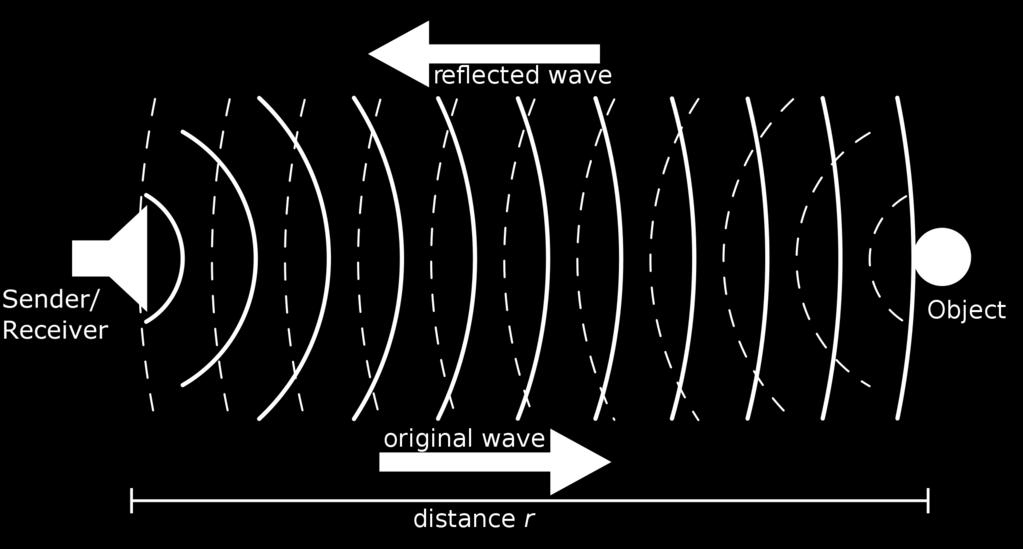
56 Distance measurement: time of flight The measurement of the distance of an object is given by the measurement of the time needed by a signal to reach the object and to come back d = (v x t)/2 d = object distance v = signal velocity source signal t = time needed by the signal to reach the object and to come back d Object
57 Time of flight measurement: (example: radar and ultrasonic sonar) d = 0.5 t e v where v is the average speed of the signals emitted (air or water) and t e is the time between the signal emitted and the signal echo received.
58 Outline of the lesson Definitions of sensor and transducer Classification of transducers Fundamental properties of sensors Position sensors: switches, encoders, potentiometers, Hall-effect sensors Distance measurement: triangulation, time of flight Distance and proximity sensors: ultrasound, laser and infrared sensors Force sensors: strain gauges and force/torque sensors Inertial sensors Bibliographical references: AA.VV., Handbook of Mechatronics, CRC Press LLC, 2002, Cap.19 Fu, Gonzalez, Lee, Robotics, McGraw-Hill, Cap.6 Russel, Robot Tactile Sensing, Prentice Hall, Cap.4
59 Ultrasound sensors

60 Ultrasound sensors 2 main components: - ultrasound transducer (working both as emitter and as receiver) - electronics for computing the distance Typical working cycle: - the electronics controls the transducer to send ultrasounds Range: 0.3m to 10.5m Beam amplitude: 30 Accuracy: ca. 25mm - the receiver is disabled ofr a given time, in order to avoid false responses due to residual signal in the transducer - the received signal is amplified with an increasing gain, to compensate the reduction of intensity with distance - echos above a given threshold are considered and associated to the distances measured from the time passed from transmission

61 Examples of application of ultrasound sensors on mobile robots



62 B21 US sensors

63 LASER RANGE FINDERS A simple pin-hole short-range-finding sensor uses a laser diode as a light source, and a linear photo-diode array as a detector. The range from a sensor to the object is a function of the position of the maximum detected light along the array.
64 LASER RANGE FINDERS
 10 Systematic Error (mm mode) +/- 15 mm Statistic Error (1 Sigma) 5 mm Laser Class 1 Max.")
65 B21 LaserFinder LMS 200 Map building using the LMS 200 laser scanner Technical specification Angular Resolution 1 / 0,5 / 0,25 Response Time (ms) 13 / 26 / 53 Resolution (mm) 10 Systematic Error (mm mode) +/- 15 mm Statistic Error (1 Sigma) 5 mm Laser Class 1 Max. Distance (m) 80 Data Interface RS422 / RS232
66 Proximity sensors Sensing the presence of an object in a spacial neighborhood Passive proximity sensors: detect perturbations of the environment, like for instance modifications of the magnetic or the electric field Active proximity sensors: exploit the variations of an emitted signal, occurring due to the interrupt or the reflection of the signal flight towards the receiver Ex: magnetic passive sensors: Hall-effect sensors Ex: active optical sensors: emitter and receiver of light signal
67 Hall-effect proximity sensors A permanent magnet generates a magnetic field. The contact with a ferromagnetic object modifies the magnetic field. The Hall effect allows to measure this variation as a voltage ferromagnetic object

68 Optical sensors

69 B21 IR sensors Sharp GP2D02 IR Distance Measuring Sensor
70 Outline of the lesson Definitions of sensor and transducer Classification of transducers Fundamental properties of sensors Position sensors: switches, encoders, potentiometers, Hall-effect sensors Distance measurement: triangulation, time of flight Proximity sensors: ultrasound and infrared sensors Force sensors: strain gauges and force/torque sensors Inertial sensors Bibliographical references: AA.VV., Handbook of Mechatronics, CRC Press LLC, 2002, Cap.19
71 Load cell structures Rigid external structure Mean for measuring the applied force Measuring element
72 Piezoresistive effect Every material changes its electrical resistance with strain
, beyond which the material deformation is plastic stress p")
73 Basics of mechanical behavior of materials Stress applied to a material causes strain. The material has an elastic behavior until a stress threshold (elastic limit), beyond which the material deformation is plastic stress p strain l A l 0 0 Poisson s ratio: A A 0 Elasticity module: E

74 Piezoresistive effect Every material changes its electrical resistance with strain V In a metal block: L WH with ρ = resistivity of the material, L, W, H = dimensions of the block R R 2 R ν = Poisson s ratio of the material V=RI

75 Strain gauge The sensor shape increases sensitivity in one direction Gauge factor: G R R 1 2 ν = Poisson s ratio of the material

76 Strain gauges
77 Sensors with strain gauges
78 Cable tension sensor



79 Three-axial force/torque sensors Mechanical structure with preferred strain directions, along 3 axes Strain gauges arranged accordingly

80 w w w w w w w w c c c c c c c c c c c c c c c c f f f s z s y s x s z s y s x Three-axial force/torque sensors Forces and torques are measured from measures of the resistance variations of the strain gauges, multiplied by a coefficient array, typical for each sensor The coefficient array is built by a calibration procedure in which known forces are applied
81 Example of application of force sensors

82 Example of application of force sensors


83 Example of sensors of a mobile robotic system Hall-effect sensors on finger joints Force/torque sensor on the wrist (with strain gauges) Encoders on the motors of the arm and of the mobile base Ultrasound sensors Switches on the bumper Potentiometers in the docking system
84 Outline of the lesson Definitions of sensor and transducer Classification of transducers Fundamental properties of sensors Position sensors: switches, encoders, potentiometers, Hall-effect sensors Distance measurement: triangulation, time of flight Proximity sensors: ultrasound and infrared sensors Force sensors: strain gauges and force/torque sensors Inertial sensors Bibliographical references: AA.VV., Handbook of Mechatronics, CRC Press LLC, 2002, Cap.19
85 Kinematic quantities Position x(t); (t) Velocity v(t); w(t) Acceleration a(t); a(t) Jerk

86 Types of motion Linear: Angular: Curve:
87 Acceleration measure DIRECT: through accelerometers INDIRECT: by deriving velocity In linear or angular motion direct measurement is preferable In curve motion acceleration is measured with indirect methods


88 Typical working principle for accelerometers f t 2 d x m dt 2 c dx dt kx 2 d z dz m c kz mg cos m 2 dt dt z x2 x1 angle with respect to gravity 2 d x 2 dt 1
 Dynamic range: ±1g to ±50g fs. Natural frequencies: 12-89 Hz, Damping ratio ζ: 0.5-0.")
89 Potentiometer accelerometers A potentiometer is used to measure the relative displacement between the seismic mass and the base A viscous fluid continuously interact with the base and the mass to provide damping Low frequency of operation (lower than 100 Hz) Dynamic range: ±1g to ±50g fs. Natural frequencies: Hz, Damping ratio ζ: Potentiometer resistence: Corresponding resolution: % fs. Cross-axial sensibility: <±1%. Accuracy: ±1% fs at environmental temperature. Dimension: 50mm 3 (<0.1 gr.)
90 Piezoelectric accelerometers Piezoelectric accelerometers are widely used for general-purpose acceleration, shock, and vibration measurements. They are basically motion transducers with large output signals and comparatively small sizes. When a varying motion is applied to the accelerometer, the crystal experiences a varying force excitation (F = ma), causing a proportional electric charge q to be developed across it. These accelerometers are useful for high-frequency applications. Piezoelectric accelerometers are available in a wide range of specifications. They are manufactured as small as 3 x 3 mm in dimension with about 0.5 g in mass, including cables. They have excellent temperature ranges and some of them are designed to survive the intensive radiation environment of nuclear reactors. However, piezoelectric accelerometers tend to have larger cross-axis sensitivity than other types, about 2 4%. A mass in direct contact with the piezoelectric component or crystal
91 Strain gauge accelerometers Electric resistance strain gauges are also used for displacement sensing of the seismic mass the seismic mass is mounted on a cantilever beam rather than on springs. Resistance strain gages are bonded on each side of the beam to sense the strain in the beam resulting from the vibrational displacement of the mass. Damping for the system is provided by a viscous liquid filling the housing. The output of the strain gages is connected to an appropriate bridge circuit. The natural frequency of such a system is about 300 Hz. The low natural frequency is due to the need for a sufficiently large cantilever beam to accommodate the mounting of the strain gages.


92 Piezoresistive accelerometers Piezoresistive accelerometers are essentially semiconductor strain gauges with large gauge factors. The sensitivity of a piezoresistive sensor comes from the elastic response of its structure and resistivity of the material. Piezoresistive accelerometers are useful for acquiring vibration information at low frequencies. They are suitable to measure shocks well above 100,000g. Characteristics Frequency: Less than 1Hz-20kHz Limited temperature range: Calibration Light weight: Less than 1 to 10g AC/DC response Less than.01g to 200,000g pressure changes the resistance by mechanically deforming the sensor


93 Velocity measurement Methods based on a reference Measurements done on the object in motion and on a reference Average speed Inertial methods Do not require contact with a reference Provide the velocity relative to the initial velocity of the sensor
 Gimbal,")

94 Gyroscopes for measuring angular velocities Physical rotating device, which tends to keep its rotational axis constant, due to the effect of the angular momentum conservation law, a gyroscpe is a device composed of: Rotor, with a toroidal shape, rotating around its axis (Spin axis) Gimbal, which set the rotor free to orient in the 3 3D space directions if the rotor is rotating, its axis tends to keep its orientation, even if the support changes its orientation (Mechanism invented in 1852 by the physicist Jean Bernard Léon Foucault in the framework of his studies on earth rotation)


95 Mechanical rotating gyroscope A disk (rotor) is free to rotate with respect to one/two spin axes (1/2-DOF gyroscope) If a rotation is applied to the gyroscope support around the input axis, then the gyroscope tends to rotate around a perpendicular axis (output axis) The gyroscope generated an aoutput signal which is proportional to the angular velocity on an axis perpendicular to the spin axis T Iw T : applied torsion I: inertia w: constant rotor velocity : angular velocity around the output axis

96 Coriolis effect The mathematical relation expressing the Coriolis force is: is the Coriolis force, m is the mass, is the linear velocity, is the angular velocity of the rotation system.

97 Coriolis-based accelerometers Vibrating mass gyroscopes A vibrating element (vibrating resonator) creates an oscillatory linear velocity If the sensor is rotated about an axis orthogonal to this velocity, a Coriolis acceleration is induced The vibrating element is subjected to the Coriolis effect that causes secondary vibration orthogonal to the original vibrating direction. By sensing the secondary vibration, the rate of turn can be detected. The Coriolis force is given by:


98 Gyroscopes based on Coriolis acceleration The most common design technology for these sensors has generally used a stable quartz resonator with piezoelectric driver circuits.
Lecture 20. Measuring Pressure and Temperature (Chapter 9) Measuring Pressure Measuring Temperature MECH 373. Instrumentation and Measurements
 Measuring Pressure Measuring Temperature MECH 373. Instrumentation and Measurements") MECH 373 Instrumentation and Measurements Lecture 20 Measuring Pressure and Temperature (Chapter 9) Measuring Pressure Measuring Temperature 1 Measuring Acceleration and Vibration Accelerometers using
MECH 373 Instrumentation and Measurements Lecture 20 Measuring Pressure and Temperature (Chapter 9) Measuring Pressure Measuring Temperature 1 Measuring Acceleration and Vibration Accelerometers using
Lecture 19. Measurement of Solid-Mechanical Quantities (Chapter 8) Measuring Strain Measuring Displacement Measuring Linear Velocity
 Measuring Strain Measuring Displacement Measuring Linear Velocity") MECH 373 Instrumentation and Measurements Lecture 19 Measurement of Solid-Mechanical Quantities (Chapter 8) Measuring Strain Measuring Displacement Measuring Linear Velocity Measuring Accepleration and
MECH 373 Instrumentation and Measurements Lecture 19 Measurement of Solid-Mechanical Quantities (Chapter 8) Measuring Strain Measuring Displacement Measuring Linear Velocity Measuring Accepleration and
10 Measurement of Acceleration, Vibration and Shock Transducers
 Chapter 10: Acceleration, Vibration and Shock Measurement Dr. Lufti Al-Sharif (Revision 1.0, 25/5/2008) 1. Introduction This chapter examines the measurement of acceleration, vibration and shock. It starts
Chapter 10: Acceleration, Vibration and Shock Measurement Dr. Lufti Al-Sharif (Revision 1.0, 25/5/2008) 1. Introduction This chapter examines the measurement of acceleration, vibration and shock. It starts
Measurement Techniques for Engineers. Motion and Vibration Measurement
 Measurement Techniques for Engineers Motion and Vibration Measurement Introduction Quantities that may need to be measured are velocity, acceleration and vibration amplitude Quantities useful in predicting
Measurement Techniques for Engineers Motion and Vibration Measurement Introduction Quantities that may need to be measured are velocity, acceleration and vibration amplitude Quantities useful in predicting
Overview. Sensors? Commonly Detectable Phenomenon Physical Principles How Sensors Work? Need for Sensors Choosing a Sensor Examples
 Intro to Sensors Overview Sensors? Commonly Detectable Phenomenon Physical Principles How Sensors Work? Need for Sensors Choosing a Sensor Examples Sensors? American National Standards Institute A device
Intro to Sensors Overview Sensors? Commonly Detectable Phenomenon Physical Principles How Sensors Work? Need for Sensors Choosing a Sensor Examples Sensors? American National Standards Institute A device
Prof. S.K. Saha. Sensors 1. Lecture 5 June 11, Prof. S.K. Saha. Purpose Classification Internal Sensors. External Sensors.
 Lecture 5 June 11, 2009 Sensors Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Announcement Outlines of slides in Lectures 1-4 on May 15, 18, 21, June 01, 2009, respectively, are available from: http://web.iitd.ac.in/~saha/
Lecture 5 June 11, 2009 Sensors Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Announcement Outlines of slides in Lectures 1-4 on May 15, 18, 21, June 01, 2009, respectively, are available from: http://web.iitd.ac.in/~saha/
EE 5344 Introduction to MEMS CHAPTER 6 Mechanical Sensors. 1. Position Displacement x, θ 2. Velocity, speed Kinematic
 I. Mechanical Measurands: 1. Classification of main types: EE 5344 Introduction MEMS CHAPTER 6 Mechanical Sensors 1. Position Displacement x, θ. Velocity, speed Kinematic dx dθ v =, = ω 3. Acceleration
I. Mechanical Measurands: 1. Classification of main types: EE 5344 Introduction MEMS CHAPTER 6 Mechanical Sensors 1. Position Displacement x, θ. Velocity, speed Kinematic dx dθ v =, = ω 3. Acceleration
Basic Principle of Strain Gauge Accelerometer. Description of Strain Gauge Accelerometer
 Basic Principle of Strain Gauge Accelerometer When a cantilever beam attached with a mass at its free end is subjected to vibration, vibrational displacement of the mass takes place. Depending on the displacement
Basic Principle of Strain Gauge Accelerometer When a cantilever beam attached with a mass at its free end is subjected to vibration, vibrational displacement of the mass takes place. Depending on the displacement
Overview. Sensors? Commonly Detectable Phenomenon Physical Principles How Sensors Work? Need for Sensors Choosing a Sensor Examples
 Intro to Sensors Overview Sensors? Commonly Detectable Phenomenon Physical Principles How Sensors Work? Need for Sensors Choosing a Sensor Examples Sensors? American National Standards Institute A device
Intro to Sensors Overview Sensors? Commonly Detectable Phenomenon Physical Principles How Sensors Work? Need for Sensors Choosing a Sensor Examples Sensors? American National Standards Institute A device
APPLICATIONS OF VIBRATION TRANSDUCERS
 APPLICATIONS OF VIBRATION TRANSDUCERS 1) Measurements on Structures or Machinery Casings: Accelerometers and Velocity Sensors Used in gas turbines, axial compressors, small and mid-size pumps. These sensors
APPLICATIONS OF VIBRATION TRANSDUCERS 1) Measurements on Structures or Machinery Casings: Accelerometers and Velocity Sensors Used in gas turbines, axial compressors, small and mid-size pumps. These sensors
ME 515 Mechatronics. Overview of Computer based Control System
 ME 515 Mechatronics Introduction to Sensors I Asanga Ratnaweera Department of Faculty of Engineering University of Peradeniya Tel: 081239 (3627) Email: asangar@pdn.ac.lk Overview of Computer based Control
ME 515 Mechatronics Introduction to Sensors I Asanga Ratnaweera Department of Faculty of Engineering University of Peradeniya Tel: 081239 (3627) Email: asangar@pdn.ac.lk Overview of Computer based Control
Sensors for mobile robots
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
e453.eps 1 Change (or the absolute value) in the measured physical variable 2 Change in the sensor property is translated into low-power-level
 in the measured physical variable 2 Change in the sensor property is translated into low-power-level") 3 Basic Phenomenon in Effect in Sensor Operation Sensors Prof. Dr. M. Zahurul Haq zahurul@me.buet.ac.bd http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of
3 Basic Phenomenon in Effect in Sensor Operation Sensors Prof. Dr. M. Zahurul Haq zahurul@me.buet.ac.bd http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of
Force and Displacement Measurement
 Force and Displacement Measurement Prof. R.G. Longoria Updated Fall 20 Simple ways to measure a force http://scienceblogs.com/dotphysics/200/02/diy_force_probe.php Example: Key Force/Deflection measure
Force and Displacement Measurement Prof. R.G. Longoria Updated Fall 20 Simple ways to measure a force http://scienceblogs.com/dotphysics/200/02/diy_force_probe.php Example: Key Force/Deflection measure
I. MEASUREMENT OF TEMPERATURE
 I. MEASUREMENT OF TEMPERATURE Most frequent measurement and control Direct contact: thermometer, Indirect contact: pyrometer (detect generated heat or sensing optical properties) 1. Definition of temperature
I. MEASUREMENT OF TEMPERATURE Most frequent measurement and control Direct contact: thermometer, Indirect contact: pyrometer (detect generated heat or sensing optical properties) 1. Definition of temperature
Mechanical Sensors 1.
 DR. GYURCSEK ISTVÁN Mechanical Sensors 1. Sources and additional materials (recommended) Lambert Miklós: Szenzorok elmélet (ISBN 978-963-874001-1-3) Bp. 2009 Jacob Fraden: Handbook of Modern Sensors (ISBN
DR. GYURCSEK ISTVÁN Mechanical Sensors 1. Sources and additional materials (recommended) Lambert Miklós: Szenzorok elmélet (ISBN 978-963-874001-1-3) Bp. 2009 Jacob Fraden: Handbook of Modern Sensors (ISBN
Slide 1. Temperatures Light (Optoelectronics) Magnetic Fields Strain Pressure Displacement and Rotation Acceleration Electronic Sensors
 Magnetic Fields Strain Pressure Displacement and Rotation Acceleration Electronic Sensors") Slide 1 Electronic Sensors Electronic sensors can be designed to detect a variety of quantitative aspects of a given physical system. Such quantities include: Temperatures Light (Optoelectronics) Magnetic
Slide 1 Electronic Sensors Electronic sensors can be designed to detect a variety of quantitative aspects of a given physical system. Such quantities include: Temperatures Light (Optoelectronics) Magnetic
Sensors & Actuators. Velocity and acceleration Sensors & Actuators - H.Sarmento
 Sensors & Actuators Velocity and acceleration 014-015 Sensors & Actuators - H.Sarmento Outline Velocity sensors Gyroscopes Accelerometers 014-015 Sensors & Actuators - H.Sarmento 1 Velocity and acceleration
Sensors & Actuators Velocity and acceleration 014-015 Sensors & Actuators - H.Sarmento Outline Velocity sensors Gyroscopes Accelerometers 014-015 Sensors & Actuators - H.Sarmento 1 Velocity and acceleration
Unit 57: Mechatronic System
 Unit 57: Mechatronic System Unit code: F/60/46 QCF level: 4 Credit value: 5 OUTCOME 2 TUTORIAL 2 - SENSOR TECHNOLOGIES 2 Understand electro-mechanical models and components in mechatronic systems and products
Unit 57: Mechatronic System Unit code: F/60/46 QCF level: 4 Credit value: 5 OUTCOME 2 TUTORIAL 2 - SENSOR TECHNOLOGIES 2 Understand electro-mechanical models and components in mechatronic systems and products
Sensors and Transducers. mywbut.com
 Sensors and Transducers 1 Objectives At the end of this chapter, the students should be able to: describe the principle of operation of various sensors and transducers; namely.. Resistive Position Transducers.
Sensors and Transducers 1 Objectives At the end of this chapter, the students should be able to: describe the principle of operation of various sensors and transducers; namely.. Resistive Position Transducers.
Bioinspired Tactile Perception
 IURS 26 6th International UJI Robotics School Summer School on Humanoid Robots Benicassim, Spain, September 18, 26 Bioinspired Tactile Perception Cecilia Laschi Scuola Superiore Sant Anna, Pisa Objective
IURS 26 6th International UJI Robotics School Summer School on Humanoid Robots Benicassim, Spain, September 18, 26 Bioinspired Tactile Perception Cecilia Laschi Scuola Superiore Sant Anna, Pisa Objective
Strain, Force, and Pressure
 10-1 10-1 Strain, Force, and Pressure Force is that which results in acceleration (when forces don t cancel). Strain is the change in shape of an object...... usually due to some force. (Force is usually
10-1 10-1 Strain, Force, and Pressure Force is that which results in acceleration (when forces don t cancel). Strain is the change in shape of an object...... usually due to some force. (Force is usually
7.Piezoelectric, Accelerometer and Laser Sensors
 7.Piezoelectric, Accelerometer and Laser Sensors 7.1 Piezoelectric sensors: (Silva p.253) Piezoelectric materials such as lead-zirconate-titanate (PZT) can generate electrical charge and potential difference
7.Piezoelectric, Accelerometer and Laser Sensors 7.1 Piezoelectric sensors: (Silva p.253) Piezoelectric materials such as lead-zirconate-titanate (PZT) can generate electrical charge and potential difference
SENSORS and TRANSDUCERS
 SENSORS and TRANSDUCERS Tadeusz Stepinski, Signaler och system The Mechanical Energy Domain Physics Surface acoustic waves Silicon microresonators Variable resistance sensors Piezoelectric sensors Capacitive
SENSORS and TRANSDUCERS Tadeusz Stepinski, Signaler och system The Mechanical Energy Domain Physics Surface acoustic waves Silicon microresonators Variable resistance sensors Piezoelectric sensors Capacitive
Measurements in Mechatronic design. Transducers
 Measurements in Mechatronic design Transducers Quantities Current Voltage Torque Force Magnetic flux Distance Temperature Measurement system Physical quanties Transducer Signal conditioning Measurement
Measurements in Mechatronic design Transducers Quantities Current Voltage Torque Force Magnetic flux Distance Temperature Measurement system Physical quanties Transducer Signal conditioning Measurement
Part 2. Sensor and Transducer Instrument Selection Criteria (3 Hour)
") Part 2 Sensor and Transducer Instrument Selection Criteria (3 Hour) At the end of this chapter, you should be able to: Describe the definition of sensor and transducer Determine the specification of control
Part 2 Sensor and Transducer Instrument Selection Criteria (3 Hour) At the end of this chapter, you should be able to: Describe the definition of sensor and transducer Determine the specification of control
Chapter 7 Vibration Measurement and Applications
 Chapter 7 Vibration Measurement and Applications Dr. Tan Wei Hong School of Mechatronic Engineering Universiti Malaysia Perlis (UniMAP) Pauh Putra Campus ENT 346 Vibration Mechanics Chapter Outline 7.1
Chapter 7 Vibration Measurement and Applications Dr. Tan Wei Hong School of Mechatronic Engineering Universiti Malaysia Perlis (UniMAP) Pauh Putra Campus ENT 346 Vibration Mechanics Chapter Outline 7.1
Module I Module I: traditional test instrumentation and acquisition systems. Prof. Ramat, Stefano
 Preparatory Course (task NA 3.6) Basics of experimental testing and theoretical background Module I Module I: traditional test instrumentation and acquisition systems Prof. Ramat, Stefano Transducers A
Preparatory Course (task NA 3.6) Basics of experimental testing and theoretical background Module I Module I: traditional test instrumentation and acquisition systems Prof. Ramat, Stefano Transducers A
Sensing and Sensors: Fundamental Concepts
 Sensing and Sensors: Fundamental Concepts 2015 Sensitivity Range Precision Accuracy Resolution Offset Hysteresis Response Time Source: sensorwebs.jpl.nasa.gov Human Physiology in Space" by Barbara F. Abuja
Sensing and Sensors: Fundamental Concepts 2015 Sensitivity Range Precision Accuracy Resolution Offset Hysteresis Response Time Source: sensorwebs.jpl.nasa.gov Human Physiology in Space" by Barbara F. Abuja
The secondary winding have equal no. of turns. The secondary windings are placed identically on either side of the primary winding.
 UNIT 4 DISPLACEMENT MEASURMENT Electrical comparator Working principle of Electrical comparators: These instruments are based on the theory of Wheatstone A.C. Bridge. When the bridge is electrically balanced,
UNIT 4 DISPLACEMENT MEASURMENT Electrical comparator Working principle of Electrical comparators: These instruments are based on the theory of Wheatstone A.C. Bridge. When the bridge is electrically balanced,
e453.eps 1 Change (or the absolute value) in the measured physical variable 2 Change in the sensor property is translated into low-power-level
 in the measured physical variable 2 Change in the sensor property is translated into low-power-level") 3 Basic Phenomenon in Effect in Sensor Operation Measurement & Sensors Prof. Dr. M. Zahurul Haq http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of Engineering
3 Basic Phenomenon in Effect in Sensor Operation Measurement & Sensors Prof. Dr. M. Zahurul Haq http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of Engineering
Outline. 4 Mechanical Sensors Introduction General Mechanical properties Piezoresistivity Piezoresistive Sensors Capacitive sensors Applications
 Sensor devices Outline 4 Mechanical Sensors Introduction General Mechanical properties Piezoresistivity Piezoresistive Sensors Capacitive sensors Applications Introduction Two Major classes of mechanical
Sensor devices Outline 4 Mechanical Sensors Introduction General Mechanical properties Piezoresistivity Piezoresistive Sensors Capacitive sensors Applications Introduction Two Major classes of mechanical
Objectives. Fundamentals of Dynamics: Module 9 : Robot Dynamics & controls. Lecture 31 : Robot dynamics equation (LE & NE methods) and examples
 and examples") \ Module 9 : Robot Dynamics & controls Lecture 31 : Robot dynamics equation (LE & NE methods) and examples Objectives In this course you will learn the following Fundamentals of Dynamics Coriolis component
\ Module 9 : Robot Dynamics & controls Lecture 31 : Robot dynamics equation (LE & NE methods) and examples Objectives In this course you will learn the following Fundamentals of Dynamics Coriolis component
Robotics Intelligent sensors (part 2)
") Robotics Intelligent sensors (part ) Tullio Facchinetti Tuesday 6 th December, 06 http://robot.unipv.it/toolleeo Pressure measurement static pressure is a force applied to
Robotics Intelligent sensors (part ) Tullio Facchinetti Tuesday 6 th December, 06 http://robot.unipv.it/toolleeo Pressure measurement static pressure is a force applied to
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
Glossary Innovative Measurement Solutions
 Glossary GLOSSARY OF TERMS FOR TRANSDUCERS, LOAD CELLS AND WEIGH MODULES This purpose of this document is to provide a comprehensive, alphabetical list of terms and definitions commonly employed in the
Glossary GLOSSARY OF TERMS FOR TRANSDUCERS, LOAD CELLS AND WEIGH MODULES This purpose of this document is to provide a comprehensive, alphabetical list of terms and definitions commonly employed in the
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
Robotics Errors and compensation
 Robotics Errors and compensation Tullio Facchinetti Friday 17 th January, 2014 13:17 http://robot.unipv.it/toolleeo Problems in sensors measurement the most prominent problems
Robotics Errors and compensation Tullio Facchinetti Friday 17 th January, 2014 13:17 http://robot.unipv.it/toolleeo Problems in sensors measurement the most prominent problems
Experimental methods. Sensors of displacement and its derivation. 07/10/2016 KTS/EXM1 - Sensors of displacement and its derivation
 Experimental methods Sensors of displacement and its derivation 1 Position sensors with discrete signal Limit Switches (contact) Source: www.honeywell.com 2 Position sensors with discrete signal Inductive
Experimental methods Sensors of displacement and its derivation 1 Position sensors with discrete signal Limit Switches (contact) Source: www.honeywell.com 2 Position sensors with discrete signal Inductive
Institute for Electron Microscopy and Nanoanalysis Graz Centre for Electron Microscopy
 Institute for Electron Microscopy and Nanoanalysis Graz Centre for Electron Microscopy Micromechanics Ass.Prof. Priv.-Doz. DI Dr. Harald Plank a,b a Institute of Electron Microscopy and Nanoanalysis, Graz
Institute for Electron Microscopy and Nanoanalysis Graz Centre for Electron Microscopy Micromechanics Ass.Prof. Priv.-Doz. DI Dr. Harald Plank a,b a Institute of Electron Microscopy and Nanoanalysis, Graz
Sensors and transducers
 Sensors and transducers Measurement is an important subsystem of a mechatronics system. Its main function is to collect the information on system status and to feed it to the micro-processor(s) for controlling
Sensors and transducers Measurement is an important subsystem of a mechatronics system. Its main function is to collect the information on system status and to feed it to the micro-processor(s) for controlling
1 Force Sensing. Lecture Notes. 1.1 Load Cell. 1.2 Stress and Strain
 Lecture Notes 1 Force Sensing 1.1 Load Cell A Load Cell is a structure which supports the load and deflects a known amount in response to applied forces and torques. The deflections are measured to characterize
Lecture Notes 1 Force Sensing 1.1 Load Cell A Load Cell is a structure which supports the load and deflects a known amount in response to applied forces and torques. The deflections are measured to characterize
Dimension measurement. By Mr.Vuttichai Sittiarttakorn
 Dimension measurement By Mr.Vuttichai Sittiarttakorn 1 LECTURE OUTLINE 1. Introduction 2. Standards and Calibration 3. Relative displacement : Translational and Rotational 4. displacement transducers Potentiometers
Dimension measurement By Mr.Vuttichai Sittiarttakorn 1 LECTURE OUTLINE 1. Introduction 2. Standards and Calibration 3. Relative displacement : Translational and Rotational 4. displacement transducers Potentiometers
SENSORS AND TRANSDUCERS
 Electrical Measurements International Program Department of Electrical Engineering UNIVERSITAS INDONESIA ANDRITTO ABDUL GHAFFAR ANDHIKA ADIEL INSANI Lecturer : Ir. Chairul Hudaya, ST, M.Eng., Ph.D., IPM
Electrical Measurements International Program Department of Electrical Engineering UNIVERSITAS INDONESIA ANDRITTO ABDUL GHAFFAR ANDHIKA ADIEL INSANI Lecturer : Ir. Chairul Hudaya, ST, M.Eng., Ph.D., IPM
Strain Measurement. Prof. Yu Qiao. Department of Structural Engineering, UCSD. Strain Measurement
 Strain Measurement Prof. Yu Qiao Department of Structural Engineering, UCSD Strain Measurement The design of load-carrying components for machines and structures requires information about the distribution
Strain Measurement Prof. Yu Qiao Department of Structural Engineering, UCSD Strain Measurement The design of load-carrying components for machines and structures requires information about the distribution
Automatic Control Systems. -Lecture Note 15-
 -Lecture Note 15- Modeling of Physical Systems 5 1/52 AC Motors AC Motors Classification i) Induction Motor (Asynchronous Motor) ii) Synchronous Motor 2/52 Advantages of AC Motors i) Cost-effective ii)
-Lecture Note 15- Modeling of Physical Systems 5 1/52 AC Motors AC Motors Classification i) Induction Motor (Asynchronous Motor) ii) Synchronous Motor 2/52 Advantages of AC Motors i) Cost-effective ii)
ELECTRONIC SENSORS PREAMBLE. This note gives a brief introduction to sensors. The focus is. on sensor mechanisms. It describes in general terms how
 ELECTRONIC SENSORS PREAMBLE This note gives a brief introduction to sensors. The focus is on sensor mechanisms. It describes in general terms how sensors work. It covers strain gage sensors in detail.
ELECTRONIC SENSORS PREAMBLE This note gives a brief introduction to sensors. The focus is on sensor mechanisms. It describes in general terms how sensors work. It covers strain gage sensors in detail.
DYNAMIC ROTARY TORQUE MEASUREMENT USING SURFACE ACOUSTIC WAVES
 DYNAMIC ROTARY TORQUE MEASUREMENT USING SURFACE ACOUSTIC WAVES Abstract A. Lonsdale Technical Director Sensor Technology Ltd The subject of torque measurement has previously been addressed extensively.
DYNAMIC ROTARY TORQUE MEASUREMENT USING SURFACE ACOUSTIC WAVES Abstract A. Lonsdale Technical Director Sensor Technology Ltd The subject of torque measurement has previously been addressed extensively.
Dynamics of structures
 Dynamics of structures 2.Vibrations: single degree of freedom system Arnaud Deraemaeker (aderaema@ulb.ac.be) 1 Outline of the chapter *One degree of freedom systems in real life Hypothesis Examples *Response
Dynamics of structures 2.Vibrations: single degree of freedom system Arnaud Deraemaeker (aderaema@ulb.ac.be) 1 Outline of the chapter *One degree of freedom systems in real life Hypothesis Examples *Response
Biosensors and Instrumentation: Tutorial 2
 Biosensors and Instrumentation: Tutorial 2. One of the most straightforward methods of monitoring temperature is to use the thermal variation of a resistor... Suggest a possible problem with the use of
Biosensors and Instrumentation: Tutorial 2. One of the most straightforward methods of monitoring temperature is to use the thermal variation of a resistor... Suggest a possible problem with the use of
2. (a) Differentiate between rare metal thermocouples and base metal thermocouples.
 Differentiate between rare metal thermocouples and base metal thermocouples.") Code No: R05410304 Set No. 1 1. (a) Distinguish between direct and indirect methods of measurement with suitable examples. (b) What are desired, modifying and interfering inputs for an instrumentation
Code No: R05410304 Set No. 1 1. (a) Distinguish between direct and indirect methods of measurement with suitable examples. (b) What are desired, modifying and interfering inputs for an instrumentation
Advanced Measurements
 Albaha University Faculty of Engineering Mechanical Engineering Department Lecture 11: Force, Strain, and Tactile Sensors Ossama Abouelatta o_abouelatta@yahoo.com Mechanical Engineering Department Faculty
Albaha University Faculty of Engineering Mechanical Engineering Department Lecture 11: Force, Strain, and Tactile Sensors Ossama Abouelatta o_abouelatta@yahoo.com Mechanical Engineering Department Faculty
Unit 3 Transducers. Lecture_3.1 Introduction to Transducers
 Unit 3 Transducers Lecture_3.1 Introduction to Transducers Introduction to transducers A transducer is a device that converts one form of energy to other form. It converts the measurand to a usable electrical
Unit 3 Transducers Lecture_3.1 Introduction to Transducers Introduction to transducers A transducer is a device that converts one form of energy to other form. It converts the measurand to a usable electrical
Foundations of MEMS. Chang Liu. McCormick School of Engineering and Applied Science Northwestern University. International Edition Contributions by
 Foundations of MEMS Second Edition Chang Liu McCormick School of Engineering and Applied Science Northwestern University International Edition Contributions by Vaishali B. Mungurwadi B. V. Bhoomaraddi
Foundations of MEMS Second Edition Chang Liu McCormick School of Engineering and Applied Science Northwestern University International Edition Contributions by Vaishali B. Mungurwadi B. V. Bhoomaraddi
1 2 Models, Theories, and Laws 1.5 Distinguish between models, theories, and laws 2.1 State the origin of significant figures in measurement
 Textbook Correlation Textbook Correlation Physics 1115/2015 Chapter 1 Introduction, Measurement, Estimating 1.1 Describe thoughts of Aristotle vs. Galileo in describing motion 1 1 Nature of Science 1.2
Textbook Correlation Textbook Correlation Physics 1115/2015 Chapter 1 Introduction, Measurement, Estimating 1.1 Describe thoughts of Aristotle vs. Galileo in describing motion 1 1 Nature of Science 1.2
Mechatronics II Laboratory EXPERIMENT #1: FORCE AND TORQUE SENSORS DC Motor Characteristics Dynamometer, Part I
 Mechatronics II Laboratory EXPEIMENT #1: FOCE AND TOQUE SENSOS DC Motor Characteristics Dynamometer, Part I Force Sensors Force and torque are not measured directly. Typically, the deformation or strain
Mechatronics II Laboratory EXPEIMENT #1: FOCE AND TOQUE SENSOS DC Motor Characteristics Dynamometer, Part I Force Sensors Force and torque are not measured directly. Typically, the deformation or strain
Silicon Capacitive Accelerometers. Ulf Meriheinä M.Sc. (Eng.) Business Development Manager VTI TECHNOLOGIES
 Business Development Manager VTI TECHNOLOGIES") Silicon Capacitive Accelerometers Ulf Meriheinä M.Sc. (Eng.) Business Development Manager VTI TECHNOLOGIES 1 Measuring Acceleration The acceleration measurement is based on Newton s 2nd law: Let the acceleration
Silicon Capacitive Accelerometers Ulf Meriheinä M.Sc. (Eng.) Business Development Manager VTI TECHNOLOGIES 1 Measuring Acceleration The acceleration measurement is based on Newton s 2nd law: Let the acceleration
(Refer Slide Time: 1: 19)
") Mechanical Measurements and Metrology Prof. S. P. Venkateshan Department of Mechanical Engineering Indian Institute of Technology, Madras Module - 4 Lecture - 46 Force Measurement So this will be lecture
Mechanical Measurements and Metrology Prof. S. P. Venkateshan Department of Mechanical Engineering Indian Institute of Technology, Madras Module - 4 Lecture - 46 Force Measurement So this will be lecture
Transducers. ME 3251 Thermal Fluid Systems
 Transducers ME 3251 Thermal Fluid Systems 1 Transducers Transform values of physical variables into equivalent electrical signals Converts a signal from one form to another form 2 Types of Transducers
Transducers ME 3251 Thermal Fluid Systems 1 Transducers Transform values of physical variables into equivalent electrical signals Converts a signal from one form to another form 2 Types of Transducers
QUESTION BANK DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING UNIT I - INTRODUCTION SYLLABUS
 QUESTION BANK DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEM NAME OF THE SUBJECT NAME OF THE FACULTY : II / IV : EE6404 MEASUREMENTS AND INSTRUMENTATION : K.M.S.MUTHUKUMARA RAJAGURU, AP/EEE
QUESTION BANK DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEM NAME OF THE SUBJECT NAME OF THE FACULTY : II / IV : EE6404 MEASUREMENTS AND INSTRUMENTATION : K.M.S.MUTHUKUMARA RAJAGURU, AP/EEE
COOPERATIVE PATENT CLASSIFICATION
 CPC G COOPERATIVE PATENT CLASSIFICATION PHYSICS (NOTES omitted) INSTRUMENTS G01 MEASURING (counting G06M); TESTING (NOTES omitted) G01P MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR
CPC G COOPERATIVE PATENT CLASSIFICATION PHYSICS (NOTES omitted) INSTRUMENTS G01 MEASURING (counting G06M); TESTING (NOTES omitted) G01P MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR
Displacement at very low frequencies produces very low accelerations since:
 SEISMOLOGY The ability to do earthquake location and calculate magnitude immediately brings us into two basic requirement of instrumentation: Keeping accurate time and determining the frequency dependent
SEISMOLOGY The ability to do earthquake location and calculate magnitude immediately brings us into two basic requirement of instrumentation: Keeping accurate time and determining the frequency dependent
PANDIAN SARASWATHI YADAV ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EE6404-MEASUREMENTS AND INSTRUMENTATION
 PANDIAN SARASWATHI YADAV ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EE6404-MEASUREMENTS AND INSTRUMENTATION ACADEMIC YEAR: 2015-2016 (EVEN SEMESTER) Branch: EEE QUESTION BANK
PANDIAN SARASWATHI YADAV ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EE6404-MEASUREMENTS AND INSTRUMENTATION ACADEMIC YEAR: 2015-2016 (EVEN SEMESTER) Branch: EEE QUESTION BANK
Theory and Design for Mechanical Measurements
 Theory and Design for Mechanical Measurements Third Edition Richard S. Figliola Clemson University Donald E. Beasley Clemson University John Wiley & Sons, Inc. New York / Chichester / Weinheim / Brisbane
Theory and Design for Mechanical Measurements Third Edition Richard S. Figliola Clemson University Donald E. Beasley Clemson University John Wiley & Sons, Inc. New York / Chichester / Weinheim / Brisbane
INSTRUMENTATION ECE Fourth Semester. Presented By:- Sumit Grover Lect., Deptt. of ECE
 INSTRUMENTATION ECE Fourth Semester Presented By:- Sumit Grover Lect., Deptt. of ECE Detailed Contents Objectives Sensors and transducer Classification of transducers Temperature transducers Resistance
INSTRUMENTATION ECE Fourth Semester Presented By:- Sumit Grover Lect., Deptt. of ECE Detailed Contents Objectives Sensors and transducer Classification of transducers Temperature transducers Resistance
Lecture 16 Light transmission and optical detectors
 Lecture 6 Light transmission and optical detectors Charged particle traversing through a material can generate signal in form of light via electromagnetic interactions with orbital electrons of the atoms
Lecture 6 Light transmission and optical detectors Charged particle traversing through a material can generate signal in form of light via electromagnetic interactions with orbital electrons of the atoms
UNIT - IV SEMICONDUCTORS AND MAGNETIC MATERIALS
 1. What is intrinsic If a semiconductor is sufficiently pure, then it is known as intrinsic semiconductor. ex:: pure Ge, pure Si 2. Mention the expression for intrinsic carrier concentration of intrinsic
1. What is intrinsic If a semiconductor is sufficiently pure, then it is known as intrinsic semiconductor. ex:: pure Ge, pure Si 2. Mention the expression for intrinsic carrier concentration of intrinsic
Introduction to Haptic Systems
 Introduction to Haptic Systems Félix Monasterio-Huelin & Álvaro Gutiérrez & Blanca Larraga October 8, 2018 Contents Contents 1 List of Figures 1 1 Introduction 2 2 DC Motor 3 3 1 DOF DC motor model with
Introduction to Haptic Systems Félix Monasterio-Huelin & Álvaro Gutiérrez & Blanca Larraga October 8, 2018 Contents Contents 1 List of Figures 1 1 Introduction 2 2 DC Motor 3 3 1 DOF DC motor model with
STRAIN GAUGES YEDITEPE UNIVERSITY DEPARTMENT OF MECHANICAL ENGINEERING
 STRAIN GAUGES YEDITEPE UNIVERSITY DEPARTMENT OF MECHANICAL ENGINEERING 1 YEDITEPE UNIVERSITY ENGINEERING FACULTY MECHANICAL ENGINEERING LABORATORY 1. Objective: Strain Gauges Know how the change in resistance
STRAIN GAUGES YEDITEPE UNIVERSITY DEPARTMENT OF MECHANICAL ENGINEERING 1 YEDITEPE UNIVERSITY ENGINEERING FACULTY MECHANICAL ENGINEERING LABORATORY 1. Objective: Strain Gauges Know how the change in resistance
SENSOR DEVICES MECHANICAL SENSORS
 SENSOR DEVICES MECHANICAL SENSORS OUTLINE 4 Mechanical Sensors Introduction General mechanical properties Piezoresistivity Piezoresistive sensors Capacitive sensors Applications INTRODUCTION MECHANICAL
SENSOR DEVICES MECHANICAL SENSORS OUTLINE 4 Mechanical Sensors Introduction General mechanical properties Piezoresistivity Piezoresistive sensors Capacitive sensors Applications INTRODUCTION MECHANICAL
Foundations of Ultraprecision Mechanism Design
 Foundations of Ultraprecision Mechanism Design S.T. Smith University of North Carolina at Charlotte, USA and D.G. Chetwynd University of Warwick, UK GORDON AND BREACH SCIENCE PUBLISHERS Switzerland Australia
Foundations of Ultraprecision Mechanism Design S.T. Smith University of North Carolina at Charlotte, USA and D.G. Chetwynd University of Warwick, UK GORDON AND BREACH SCIENCE PUBLISHERS Switzerland Australia
MCT151: Introduction to Mechatronics Lecture 10: Sensors & Transduction Mechanisms
 Faculty of Engineering MCT151: Introduction to Mechatronics Lecture 10: Sensors & Transduction Mechanisms Slides are borrowed from Dr. Mohamed Elshiekh lectures Types of sensors Sensors are considered
Faculty of Engineering MCT151: Introduction to Mechatronics Lecture 10: Sensors & Transduction Mechanisms Slides are borrowed from Dr. Mohamed Elshiekh lectures Types of sensors Sensors are considered
Strain Measurements. Isaac Choutapalli
 Note that for axial elongation (Eaxiai > 0), Erransverse (from Equation C.6), and therefore Strain Measurements Isaac Choutapalli Department of Mechanical Engineering The University of Texas - Pan American
Note that for axial elongation (Eaxiai > 0), Erransverse (from Equation C.6), and therefore Strain Measurements Isaac Choutapalli Department of Mechanical Engineering The University of Texas - Pan American
Units (Different systems of units, SI units, fundamental and derived units)
") Physics: Units & Measurement: Units (Different systems of units, SI units, fundamental and derived units) Dimensional Analysis Precision and significant figures Fundamental measurements in Physics (Vernier
Physics: Units & Measurement: Units (Different systems of units, SI units, fundamental and derived units) Dimensional Analysis Precision and significant figures Fundamental measurements in Physics (Vernier
INTRODUCTION TO SCA\ \I\G TUNNELING MICROSCOPY
 INTRODUCTION TO SCA\ \I\G TUNNELING MICROSCOPY SECOND EDITION C. JULIAN CHEN Department of Applied Physics and Applied Mathematics, Columbia University, New York OXFORD UNIVERSITY PRESS Contents Preface
INTRODUCTION TO SCA\ \I\G TUNNELING MICROSCOPY SECOND EDITION C. JULIAN CHEN Department of Applied Physics and Applied Mathematics, Columbia University, New York OXFORD UNIVERSITY PRESS Contents Preface
DESIGN AND SIMULATION OF UNDER WATER ACOUSTIC MEMS SENSOR
 DESIGN AND SIMULATION OF UNDER WATER ACOUSTIC MEMS SENSOR Smitha G Prabhu 1, Nagabhushana S *2 1 Dept. Of Electronics and communication, Center for Nano Materials and MEMS, 2 Dept. of Electronics and Communication,
DESIGN AND SIMULATION OF UNDER WATER ACOUSTIC MEMS SENSOR Smitha G Prabhu 1, Nagabhushana S *2 1 Dept. Of Electronics and communication, Center for Nano Materials and MEMS, 2 Dept. of Electronics and Communication,
SCANNING-PROBE TECHNIQUES OR APPARATUS; APPLICATIONS OF SCANNING-PROBE TECHNIQUES, e.g. SCANNING PROBE MICROSCOPY [SPM]
![SCANNING-PROBE TECHNIQUES OR APPARATUS; APPLICATIONS OF SCANNING-PROBE TECHNIQUES, e.g. SCANNING PROBE MICROSCOPY [SPM]](/thumbs/81/83165631.jpg "SCANNING-PROBE TECHNIQUES OR APPARATUS; APPLICATIONS OF SCANNING-PROBE TECHNIQUES, e.g. SCANNING PROBE MICROSCOPY [SPM]") G01Q SCANNING-PROBE TECHNIQUES OR APPARATUS; APPLICATIONS OF SCANNING-PROBE TECHNIQUES, e.g. SCANNING PROBE MICROSCOPY [SPM] Scanning probes, i.e. devices having at least a tip of nanometre sized dimensions
G01Q SCANNING-PROBE TECHNIQUES OR APPARATUS; APPLICATIONS OF SCANNING-PROBE TECHNIQUES, e.g. SCANNING PROBE MICROSCOPY [SPM] Scanning probes, i.e. devices having at least a tip of nanometre sized dimensions
Introduction to Strain Gage (SG) Technology
 Technology") IDMIL - Input Devices and Music Interaction Laboratory McGill University Introduction to Strain Gage (SG) Technology Carolina Brum Medeiros March 14, 2011 About this talk objective: present the essential
IDMIL - Input Devices and Music Interaction Laboratory McGill University Introduction to Strain Gage (SG) Technology Carolina Brum Medeiros March 14, 2011 About this talk objective: present the essential
DEVELOPMENT OF A NOVEL ACTIVE ISOLATION CONCEPT 1
 DEVELOPMENT OF A NOVEL ACTIVE ISOLATION CONCEPT 1 Michiel J. Vervoordeldonk, Theo A.M. Ruijl, Rob M.G. Rijs Philips Centre for Industrial Technology, PO Box 518, 5600 MD Eindhoven, The Netherlands 2 1
DEVELOPMENT OF A NOVEL ACTIVE ISOLATION CONCEPT 1 Michiel J. Vervoordeldonk, Theo A.M. Ruijl, Rob M.G. Rijs Philips Centre for Industrial Technology, PO Box 518, 5600 MD Eindhoven, The Netherlands 2 1
Transducers. EEE355 Industrial Electronics
 Transducers EEE355 Industrial Electronics 1 Terminology Transducers convert one form of energy into another Sensors/Actuators are input/output transducers Sensors can be passive (e.g. change in resistance)
Transducers EEE355 Industrial Electronics 1 Terminology Transducers convert one form of energy into another Sensors/Actuators are input/output transducers Sensors can be passive (e.g. change in resistance)
Beam diagnostics: Alignment of the beam to prevent for activation. Accelerator physics: using these sensitive particle detectors.
 Beam Loss Monitors When energetic beam particles penetrates matter, secondary particles are emitted: this can be e, γ, protons, neutrons, excited nuclei, fragmented nuclei... Spontaneous radiation and
Beam Loss Monitors When energetic beam particles penetrates matter, secondary particles are emitted: this can be e, γ, protons, neutrons, excited nuclei, fragmented nuclei... Spontaneous radiation and
Mechatronics II Laboratory EXPERIMENT #1 MOTOR CHARACTERISTICS FORCE/TORQUE SENSORS AND DYNAMOMETER PART 1
 Mechatronics II Laboratory EXPEIMENT #1 MOTO CHAACTEISTICS FOCE/TOQUE SENSOS AND DYNAMOMETE PAT 1 Force Sensors Force and torque are not measured directly. Typically, the deformation or strain of some
Mechatronics II Laboratory EXPEIMENT #1 MOTO CHAACTEISTICS FOCE/TOQUE SENSOS AND DYNAMOMETE PAT 1 Force Sensors Force and torque are not measured directly. Typically, the deformation or strain of some
Vibration Measurements Vibration Instrumentation. MCE371: Vibrations. Prof. Richter. Department of Mechanical Engineering. Handout 11 Fall 2011
 MCE371: Vibrations Prof. Richter Department of Mechanical Engineering Handout 11 Fall 2011 Overview of Vibration Measurements Follow Palm, Sect. pp 425-430 and 559-562. Additional references: Holman, J.P.,
MCE371: Vibrations Prof. Richter Department of Mechanical Engineering Handout 11 Fall 2011 Overview of Vibration Measurements Follow Palm, Sect. pp 425-430 and 559-562. Additional references: Holman, J.P.,
VMS-GeoMil. Background
 Background When using a drilling rig for cone penetration testing, a mechanical clamp can be mounted to the drilling head (by means of a special transition piece). The depth than can be achieved depends
Background When using a drilling rig for cone penetration testing, a mechanical clamp can be mounted to the drilling head (by means of a special transition piece). The depth than can be achieved depends
Resonant Column and Torsional Cyclic Shear System
 Resonant Column and Torsional Cyclic Shear System Combined Resonant Column (RC) & Torsional Cyclic Shear (TCS) Test apparatus to determinate with saturated soil : Shear Modulus Damping Modulus versus Shear
Resonant Column and Torsional Cyclic Shear System Combined Resonant Column (RC) & Torsional Cyclic Shear (TCS) Test apparatus to determinate with saturated soil : Shear Modulus Damping Modulus versus Shear
Transducer. A device to which change or converts physical quantity in a more easily measurable quantity. Transducer. (Input) Sensor.
 Sensor.") Transducer A device to which change or converts physical quantity in a more easily measurable quantity Transducer (Input) Sensor (Output) Actuator Sensor A device which senses and detects the physical
Transducer A device to which change or converts physical quantity in a more easily measurable quantity Transducer (Input) Sensor (Output) Actuator Sensor A device which senses and detects the physical
Arrow Brasil. Rodrigo Rodrigues Field Application Engineer F: Date: 30/01/2014 TM 2
 TM Arrow Brasil Rodrigo Rodrigues Field Application Engineer Rodrigo.rodrigues@arrowbrasil.com.br F:+55 11 3613-9331 Date: 30/01/2014 TM 2 State-of-the-art review Introduction How a Gyro Works Performance
TM Arrow Brasil Rodrigo Rodrigues Field Application Engineer Rodrigo.rodrigues@arrowbrasil.com.br F:+55 11 3613-9331 Date: 30/01/2014 TM 2 State-of-the-art review Introduction How a Gyro Works Performance
Cryogenic Instrumentation I Thermometry OUTLINE Thermometry Pt (pure metal) Temperature Ranges of Thermometer Application Typical Resistive Thermal
 Temperature Ranges of Thermometer Application Typical Resistive Thermal") Cryogenic Instrumentation I 1. Thermometry 2. anges of Application 3. Constant Volume 4. Thermocouples 5. Time esponse Data 6. 4 Terminal esistance Measurement OUTLINE 8. Pt (pure metal) 9. Typical esistive
Cryogenic Instrumentation I 1. Thermometry 2. anges of Application 3. Constant Volume 4. Thermocouples 5. Time esponse Data 6. 4 Terminal esistance Measurement OUTLINE 8. Pt (pure metal) 9. Typical esistive
Piezoelectric Actuator for Micro Robot Used in Nanosatellite
 Piezoelectric Actuator for Micro Robot Used in Nanosatellite R Bansevicius, S Navickaite, V Jurenas and A Bubulis PIEZOELECTRIC ACTUATOR FOR MICRO ROBOT USED IN NANOSATELLITE. R Bansevicius 1, S Navickaite,
Piezoelectric Actuator for Micro Robot Used in Nanosatellite R Bansevicius, S Navickaite, V Jurenas and A Bubulis PIEZOELECTRIC ACTUATOR FOR MICRO ROBOT USED IN NANOSATELLITE. R Bansevicius 1, S Navickaite,
Paroscientific, Inc. Digiquartz Technology Overview. Paroscientific, Inc.
 Digiquartz Technology Overview Quartz Crystal A quartz crystal resonator is the key sensing element in a Digiquartz pressure transducer. Quartz was chosen for the following inherent characteristics: High
Digiquartz Technology Overview Quartz Crystal A quartz crystal resonator is the key sensing element in a Digiquartz pressure transducer. Quartz was chosen for the following inherent characteristics: High
Transduction Based on Changes in the Energy Stored in an Electrical Field
 Lecture 6- Transduction Based on Changes in the Energy Stored in an Electrical Field Actuator Examples Microgrippers Normal force driving In-plane force driving» Comb-drive device F = εav d 1 ε oε F rwv
Lecture 6- Transduction Based on Changes in the Energy Stored in an Electrical Field Actuator Examples Microgrippers Normal force driving In-plane force driving» Comb-drive device F = εav d 1 ε oε F rwv
Sensors Lecture #5: Position and Displacement using Resistive, Capacitive and Inductive Sensors
 Sensors Lecture #5: Position and Displacement using Resistive, Capacitive and Inductive Sensors Jerome P. Lynch Department of Civil and Environmental Engineering Department of Electrical Engineering and
Sensors Lecture #5: Position and Displacement using Resistive, Capacitive and Inductive Sensors Jerome P. Lynch Department of Civil and Environmental Engineering Department of Electrical Engineering and
 Set No. 1 1. (a) Differentiate among Desired, Modifying and Interfering inputs. (b) How do you eliminate the effects of interfering and modifying inputs? Explain 2. (a) Define the term Transducer and explain
Set No. 1 1. (a) Differentiate among Desired, Modifying and Interfering inputs. (b) How do you eliminate the effects of interfering and modifying inputs? Explain 2. (a) Define the term Transducer and explain
Energy balance in self-powered MR damper-based vibration reduction system
 BULLETIN OF THE POLISH ACADEMY OF SCIENCES TECHNICAL SCIENCES, Vol. 59, No. 1, 2011 DOI: 10.2478/v10175-011-0011-4 Varia Energy balance in self-powered MR damper-based vibration reduction system J. SNAMINA
BULLETIN OF THE POLISH ACADEMY OF SCIENCES TECHNICAL SCIENCES, Vol. 59, No. 1, 2011 DOI: 10.2478/v10175-011-0011-4 Varia Energy balance in self-powered MR damper-based vibration reduction system J. SNAMINA
Chapter 24 Photonics Question 1 Question 2 Question 3 Question 4 Question 5
 Chapter 24 Photonics Data throughout this chapter: e = 1.6 10 19 C; h = 6.63 10 34 Js (or 4.14 10 15 ev s); m e = 9.1 10 31 kg; c = 3.0 10 8 m s 1 Question 1 Visible light has a range of photons with wavelengths
Chapter 24 Photonics Data throughout this chapter: e = 1.6 10 19 C; h = 6.63 10 34 Js (or 4.14 10 15 ev s); m e = 9.1 10 31 kg; c = 3.0 10 8 m s 1 Question 1 Visible light has a range of photons with wavelengths
Control Engineering BDA30703
 Control Engineering BDA30703 Lecture 4: Transducers Prepared by: Ramhuzaini bin Abd. Rahman Expected Outcomes At the end of this lecture, students should be able to; 1) Explain a basic measurement system.
Control Engineering BDA30703 Lecture 4: Transducers Prepared by: Ramhuzaini bin Abd. Rahman Expected Outcomes At the end of this lecture, students should be able to; 1) Explain a basic measurement system.
FEEDBACK CONTROL SYSTEMS
 FEEDBAC CONTROL SYSTEMS. Control System Design. Open and Closed-Loop Control Systems 3. Why Closed-Loop Control? 4. Case Study --- Speed Control of a DC Motor 5. Steady-State Errors in Unity Feedback Control
FEEDBAC CONTROL SYSTEMS. Control System Design. Open and Closed-Loop Control Systems 3. Why Closed-Loop Control? 4. Case Study --- Speed Control of a DC Motor 5. Steady-State Errors in Unity Feedback Control
Fundamentals of Low Intensity Shock Calibration
 Low intensity shock metrology for safety related applications Fundamentals of Low Intensity Shock Calibration Speaker : Yu-Chung Huang Date : 2014.08.20 Center for Measurement Standards/ Industrial Technology
Low intensity shock metrology for safety related applications Fundamentals of Low Intensity Shock Calibration Speaker : Yu-Chung Huang Date : 2014.08.20 Center for Measurement Standards/ Industrial Technology
Lecture Module 5: Introduction to Attitude Stabilization and Control
 1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
MEMS Tuning-Fork Gyroscope Mid-Term Report Amanda Bristow Travis Barton Stephen Nary
 MEMS Tuning-Fork Gyroscope Mid-Term Report Amanda Bristow Travis Barton Stephen Nary Abstract MEMS based gyroscopes have gained in popularity for use as rotation rate sensors in commercial products like
MEMS Tuning-Fork Gyroscope Mid-Term Report Amanda Bristow Travis Barton Stephen Nary Abstract MEMS based gyroscopes have gained in popularity for use as rotation rate sensors in commercial products like