Physics 106b: Lecture 7 25 January, 2018
|
|
|
- Peregrine Summers
- 6 years ago
- Views:
Transcription
1 Physics 106b: Lecture 7 25 January, 2018 Hamiltonian Chaos: Introduction Integrable Systems We start with systems that do not exhibit chaos, but instead have simple periodic motion (like the SHO) with N degrees of freedom. We discussed the simple (linear) harmonic oscillator (SHO) in Ph106a, Lecture 6. We discussed how to decompose N coupled SHO s into N decoupled normal modes, in Ph106a, Lecture 18. We discussed Action-angle variables, a choice of variables that simplify the discussion of periodic orbits, in Ph106a, Lecture 12; here s a quick review. One degree of freedom First consider a system with one degree of freedom (q, p) governed by the Hamiltonian H(p, q), which can be solved to give periodic motion. An example would be a simple harmonic oscillator, but more generally the frequency of the motion might depend on the amplitude of motion. We seek a time independent canonical transformation (q, p) (θ, I) (c.f. Ph106a Lecture 11) such that the Hamiltonian H is a function of only I H = H(I). (1) Then θ is an ignorable coordinate, and the conjugate momentum I is a constant of the motion I = 0. The angle θ advances at a constant rate giving the frequency, which will in general depend on the action variable θ = H = ω(i). (2) I The action variable I can be evaluated as an integral over the orbit in the (q, p) plane I = 1 p dq (3) 2π (see Hand and Finch 6.5). The canonical transformation can be expressed in terms of a generating function. We choose the type-2 generating function that depends on the new momentum and the old coordinate. Thus we introduce the generating function S(I, q) with the properties (cf. Hand and Finch 6.2 and Table 6.1) new coordinate θ = S I, (4) old momentum p = S q. (5) We want to find S such that the new Hamiltonian is a function just of I. This is given by the Hamilton-Jacobi equation (cf. Hand and Finch pp 222-5) 1 1 In Lecture 12 of Ph106a and in Hand and Finch, the symbol W was used for the generating function (Hamiltonian s Characteristic Function) for a time independent Hamiltonian leading to a constant Hamiltonian. Here I will use the symbol S which is more common in the chaos literature, although we used this symbol before for the case of time dependent generating functions. Also this is a slightly different form of Hamilton-Jacobi theory than discussed there: we are now using the action variables as the constant momenta rather than the separation variables. 1
, the Hamiltonian is H = (1/2)(p 2 + q 2 ), and is equal to the conserved energy.")
, the conserved energy and the subsequent phase space flow (trajectory) is a clockwise circle.")
2 ( ) S H q, q = H(I) = constant (6) where we have evaluated the Hamiltonian using the momentum from Eq. (5). This is a pde in q for S(I, q) for each I and solves the problem. For the simple case of a linear SHO, in scaled coordinates (m = 1, k = 1, ω 0 = 1), the Hamiltonian is H = (1/2)(p 2 + q 2 ), and is equal to the conserved energy. Hamilton s equations give q = H/ p = p and ṗ = H/ q = q. Every point in the 2-dimensional phase space p, q thus has an associated deterministic flow ṗ, q. After choosing an initial condition (a point in phase space), the conserved energy and the subsequent phase space flow (trajectory) is a clockwise circle. In terms of action-angle coordinates, H = ω 0 I; these are like polar coordinates, where I is a constant of motion, proportional to the energy (in scaled units, E = I), and thus to the radius squared of the phase space circle; and ω 0 = dθ/dt = constant (in scaled units, ω 0 = 1) is the rate at which the point on the circle rotates around it with azimuthal angle θ. A real pendulum (the grandfather clock, Hand & Finch 4.2) is non-linear, is damped, and can be driven from oscillation into rotation. The Hamiltonian phase space flow (setting the damping to zero) is shown here: From Two degrees of freedom Two coupled linear SHOs can be decomposed into two uncoupled normal modes (Ph106a Lecture 18 or H&F ch.9). Each normal mode can be written in terms of action-angle variables. The phase space is 2N = 4 dimensional, but specific initial conditions fix the energies in each of the modes, and therefore the action-angle variables (I 1, ω 1, I 2, ω 2 ). There are thus two constants of motion I 1 and I 2, and the phase-spece trajectories lie on a 2N 2 = 2 dimensional sub-manifold: a circle for (I 1, ω 1 ) and a circle for (I 2, ω 2 ). These form a 2-torus in the 4-dimensional phase space. The phase space trajectory winds around that torus: 2
3 From fig2 Figure-1The-orbits-in-an-integrablesystem-with-2degrees-of-freedom-can-be-visualized-as The ratio of orbiting frequencies Ω = ω 2 /ω 1 is called the winding number; it will be important later! Many degrees of freedom For N degrees of freedom a system for which the same action angle procedure works is called integrable. These are very special systems most Hamiltonians will not be integrable. The integrable system will be the starting point for the perturbation theory, and so I will call the Hamiltonian H 0 (p, q) with q and p N-dimensional vectors of the coordinates and conjugate momenta. Integrability implies we can find a canonical transformation (q, p) (θ, I) such that the new Hamiltonian is a function of just I. The angles θ = (θ 1, θ 2,... θ N ) are ignorable, and the action variables I = (I 1, I 2,... I N ) are constants of the motion. Thus a necessary condition for a system with N degrees of freedom to be integrable is that there are N constants of the motion. This is not sufficient the constants must also be in involution. (This is analogous to the idea of commuting operators in quantum mechanics, that are then simultaneously diagonalizable.) The canonical transformation is given by the generating function S 0 (I, q) with the Hamilton- Jacobi equation for S 0 ( ) S0 H 0 q, q = H 0 (I) independent of θ. (7) The θ j evolve at constant rates ω 0,j with ω 0 = H 0 I or in component form ω 0,j = H 0 I j. (8) The motion is on the product of N limit cycles, i.e. motion on an N-torus. This is of dimension N, compared with 2N 1 for the constant energy surface, so that the integrable dynamics sample a tiny fraction of the constant energy surface. We assume that this part of the problem is solved (e.g. for N balls and springs). The approach to chaos - Preliminaries Hamiltonian dynamics of a single degree of freedom with a time independent Hamiltonian (no energy dissipation) cannot give chaos, since trajectories cannot cross and this restricts the possible dynamics on the two dimensional phase space. The simplest examples of Hamiltonian chaos are 2 degrees of freedom (two positions, two conjugate momenta) with a time independent Hamiltonian. The constraint of constant energy confines the dynamics to a three dimensional surface in the four dimensional phase space. 1 degree of freedom (one position, one conjugate momentum) with a time-varying but periodic Hamiltonian (eg, a regular kick). We first discuss two examples, and then a perturbation approach to the question of when simple periodic motion breaks down to more complex dynamics. We will talk more about the complex dynamics in the next lecture. 3
4 Double pendulum Hand and Finch 11.1 look at this example of the first type, and we also demonstrated it and discussed it in class. For small oscillations, the phase-space trajectory winds around a 2-torus, as discussed above. If the winding number is rational (Ω = r/s, where both r and s are integers), then the trajectory makes r full orbits in ω 2 for s full orbits in ω 1, and then returns exactly to its initial starting point; it is perfectly periodic. You can plot θ 1 vs θ 2 and get a pretty Lissajous pattern. If the winding number is close (in a sense to be described later) to rational, the trajectory will return almost to its starting point; maybe a bit advanced, or retarded, in θ 1 or (equivalently) θ 2. After one more iteration around the torus, it will be displaced a bit more in the same direction. After enough trips around the torus, the trajectory might completely cover the torus. If the winding number is very irrational, it s hard to visualize the 4-dimensional phase space trajectory on the 2-torus. The Poincaré Section Poincaré s idea to visualize this motion was to take a slice (or section ) of the 4-dimensional space; so we only plot, say, I 1, ω 1 (or equivalently, θ 1, θ 1 = ω 1 ), and only when θ 2 passes through zero in the positive direction (one full oscillation or rotation of that degree of freedom). The 2-torus becomes a circle (or ellipse). If Ω = r/s is rational, there will be s distinct points, which will wind around the center of the circle r times. By counting these, you can determine the winding number Ω. If Ω is not rational, the points will fill up the circumference of the circle. The Poincaré section will be our most powerful tool for visualizing the motion of low-dimensional systems that can exhibit chaotic motion. The linear double pendulum motion, confined to the 2- torus, can t become chaotic (although, for irrational winding numbers, it can fill the torus and never return to its starting point; but it s still predictable, and small changes in the initial conditions lead to small changes in the subsequent trajectory). The nonlinear double pendulum We consider an undamped, undriven double pendulum (with, for simplicity, m 1 = m 2 = 1, l 1 = l 2 = 1, g = 1). The system is conservative (total energy is conserved, no dissipation). If the system starts out with small angular displacements (linear regime) near one of the two normal modes, The Poincaré Section shows a fixed point. A small deviation of the initial conditions away from this fixed point evolves into a circle, which is a slice of the 2-torus. If the non-linearity (as determined from the initial conditions, which specify the total energy and the initial point in 4-dimensional phase space) is not too big, the resulting trajectory remains on the 2-torus, but the 2-torus is distorted. The further away one goes from the fixed point, the further into the non-linear regime. The torus slice gets distorted, but still, the trajectory remains on it. We can say that, for these small displacements, the tori are quasi-invariant; it s possible that if we wait long enough, the non-linearity will cause the trajectory to diverge from the torus. 4
 is for Mode 1, and the green fixed point at (0, -1.15) is for Mode 2.")

5 Left: The double pendulum near the Mode 1 initial condition. Middle: The phase space trajectory of pendulum bob 1 (θ 1 vs θ 1 = ω 1 ) in Mode 1. Right: The Poincaré section for small non-linearity. Each contour corresponds to the trajectory for one particular initial condition. The red fixed point at (0,0.5) is for Mode 1, and the green fixed point at (0, -1.15) is for Mode 2. Other in-between initial conditions give contours of varying size and distortion, but the trajectories remain on the tori; they remain roughly invariant. From When the angular displacements of the two coupled pendula θ 1, θ 2 are sufficiently large so that the linear approximation sin θ θ is no longer valid, the system can no longer be cast into actionangle coordinates; the motion is no longer solvable analytically; it is no longer integrable. The motion must be followed through numerical integration (simulation), and visualized with the twodimensional Poincaré section: we plot a point in θ 1 vs θ 1 thenever θ 2 passes through zero in the positive direction. When the non-linearity (eg, the total energy) is further increased, the tori begin to break up; chains of 2, 3, or more smaller tori appear. And, in some regions (growing ever larger as the energy is increased) there is simply a chaotic spray of points. If one follows the trajectory through these points, it is increasingly difficult to predict where it will land in the next iteration; even a tiny displacement from such a point will land the trajectory in a completely different region of the phase space slice. This is chaos. Poincaré sections for the higher energy cases are shown on the next page. You are strongly encouraged to download and play with this simulation yourself! (You will need at least version 1.5 of Java (JRE).) 5


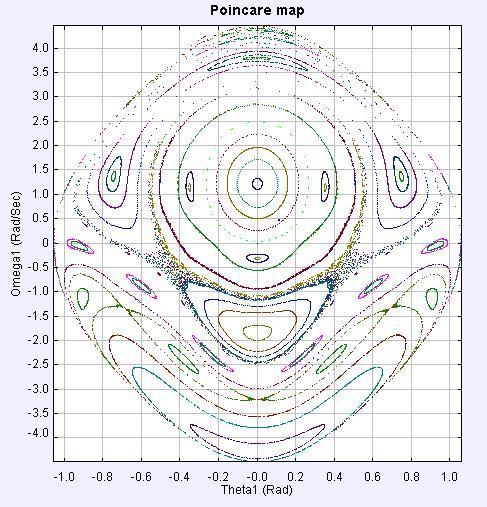

6 Appendix 5 Joules. 8 Joules. 10 Joules. 25 Joules. 6
7 Periodically Kicked Rotor This is a very simple example of the second type. K (t-n) Consider a rigid pendulum but with no gravity. The dynamics is given by the angle θ and the conjugate momentum p = θ (taking the moment of inertia to be 1). The pendulum is given a periodic impulsive vertical kick of strength K with period 1 (i.e. a kick at times t = n with n an integer). The dynamics can be reduced to the discrete map for θ n, p n which are the angle and momentum just after the nth kick. At each kick the (angular) momentum changes by the impulsive moment, but the angle doesn t change. Between kicks the momentum is constant and angle increases at the constant rate θ = p. This gives the equations The equations are usually transformed by introducing to give the standard map p n+1 p n = K sin θ n+1, (9) θ n+1 θ n = p n. (10) x n = θ n mod 1, 2π (11) y n = p n, (12) x n+1 = x n + y n mod 1, 2π (13) y n+1 = y n + K sin(2πx n+1 ). (14) Liouville s theorems tells us the map is area preserving the key property of the map linked to the Hamiltonian nature of the dynamics 2. This also follows from direct calculation of the Jacobean ] J = det [ xn+1 x n x n+1 y n y n+1 y n+1 x n y n = 1 (15) 2 The two dimensional map given by the β, l β Poincaré section of the double pendulum considered by Hand and Finch is also area preserving, but this no longer can be deduced simply from Liouville s thoerem. Instead the symplectic property of Hamiltonian dynamics must be used. This is discussed in the appendix to Chapter 6 of Hand and Finch. Actually the form they discuss is not sufficient to prove the map is area conserving because the Poincaré section is not a fixed time slice. Instead the Poincaré-Cartan invariant (p dq Hdt) must be used. This reduces to p dq for a time independent H even when the integral is taken around a loop on the Poincaré section see Hand and Finch for the rest of the discussion. 7
8 Dynamics of the Standard Map For K = 0 (no drive) the system is integrable the rotor rotates at a constant rate determined by the initial conditions. In the iterated standard map this translates into a series of points at fixed y. The appearance after many iterations depends on the winding number Ω which is defined as the average (here constant) advance in x per iteration (or the ratio of the average rotor frequency to the frequency of the periodic kicks). For a rational winding number Ω = p/q, with p, q integers, we see a discrete set of p points. For irrational winding numbers (cannot be expressed in this form) the points will eventually fill in the line 0 x 1. The winding number for K = 0 is just the value of y, so that almost all 3 initial conditions will give an irrational winding number. Even for rational y = y r giving rational winding numbers the line 0 x 1, y = y r is invariant under the dynamics (any point on the line is mapped into another point on the line.) Since x is a periodic variable the lines correspond to closed circles, or one dimensional tori. These are analogous to the circles in phase space describing the normal modes of simple harmonic oscillators and other integrable systems. The study of Hamiltonian chaos begins by seeing how these tori break down on adding the periodic kicks. See the numerical demonstrations to illustrate the result that tori with irrational winding numbers survive adding small kicks, whereas those with rational winding numbers break down to a set of elliptical and hyperbolic fixed points, with chaotic motion in regions surrounding the hyperbolic fixed points. The break down occurs because the rotor motion is resonant with the drive for rational winding numbers. Since the system is periodically driven, an interesting question is whether the kinetic energy (p 2 /2 y 2 ) of the rotor continuously grows. Because the map is area preserving, the initial tori spanning the whole range of x act as barriers to the growth of energy. Thus the break down of the last surviving of these tori is an important event. It happens at K = 1 for the standard map. For larger values of K the energy can increase to large values. It does so diffusively (i.e. the mean over a long time t remains zero, but the variance grows as t. This is known as Arnold diffusion. 3 Almost all is used as a precise term to mean all except a set of measure zero. 8
Hamiltonian Dynamics
 Hamiltonian Dynamics CDS 140b Joris Vankerschaver jv@caltech.edu CDS Feb. 10, 2009 Joris Vankerschaver (CDS) Hamiltonian Dynamics Feb. 10, 2009 1 / 31 Outline 1. Introductory concepts; 2. Poisson brackets;
Hamiltonian Dynamics CDS 140b Joris Vankerschaver jv@caltech.edu CDS Feb. 10, 2009 Joris Vankerschaver (CDS) Hamiltonian Dynamics Feb. 10, 2009 1 / 31 Outline 1. Introductory concepts; 2. Poisson brackets;
Lecture 11 : Overview
 Lecture 11 : Overview Error in Assignment 3 : In Eq. 1, Hamiltonian should be H = p2 r 2m + p2 ϕ 2mr + (p z ea z ) 2 2 2m + eφ (1) Error in lecture 10, slide 7, Eq. (21). Should be S(q, α, t) m Q = β =
Lecture 11 : Overview Error in Assignment 3 : In Eq. 1, Hamiltonian should be H = p2 r 2m + p2 ϕ 2mr + (p z ea z ) 2 2 2m + eφ (1) Error in lecture 10, slide 7, Eq. (21). Should be S(q, α, t) m Q = β =
Chaotic motion. Phys 750 Lecture 9
 Chaotic motion Phys 750 Lecture 9 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t =0to
Chaotic motion Phys 750 Lecture 9 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t =0to
Chaotic motion. Phys 420/580 Lecture 10
 Chaotic motion Phys 420/580 Lecture 10 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t
Chaotic motion Phys 420/580 Lecture 10 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t
ANALYTICAL MECHANICS. LOUIS N. HAND and JANET D. FINCH CAMBRIDGE UNIVERSITY PRESS
 ANALYTICAL MECHANICS LOUIS N. HAND and JANET D. FINCH CAMBRIDGE UNIVERSITY PRESS Preface xi 1 LAGRANGIAN MECHANICS l 1.1 Example and Review of Newton's Mechanics: A Block Sliding on an Inclined Plane 1
ANALYTICAL MECHANICS LOUIS N. HAND and JANET D. FINCH CAMBRIDGE UNIVERSITY PRESS Preface xi 1 LAGRANGIAN MECHANICS l 1.1 Example and Review of Newton's Mechanics: A Block Sliding on an Inclined Plane 1
= 0. = q i., q i = E
 Summary of the Above Newton s second law: d 2 r dt 2 = Φ( r) Complicated vector arithmetic & coordinate system dependence Lagrangian Formalism: L q i d dt ( L q i ) = 0 n second-order differential equations
Summary of the Above Newton s second law: d 2 r dt 2 = Φ( r) Complicated vector arithmetic & coordinate system dependence Lagrangian Formalism: L q i d dt ( L q i ) = 0 n second-order differential equations
A Glance at the Standard Map
 A Glance at the Standard Map by Ryan Tobin Abstract The Standard (Chirikov) Map is studied and various aspects of its intricate dynamics are discussed. Also, a brief discussion of the famous KAM theory
A Glance at the Standard Map by Ryan Tobin Abstract The Standard (Chirikov) Map is studied and various aspects of its intricate dynamics are discussed. Also, a brief discussion of the famous KAM theory
Physics 106a, Caltech 13 November, Lecture 13: Action, Hamilton-Jacobi Theory. Action-Angle Variables
 Physics 06a, Caltech 3 November, 08 Lecture 3: Action, Hamilton-Jacobi Theory Starred sections are advanced topics for interest and future reference. The unstarred material will not be tested on the final
Physics 06a, Caltech 3 November, 08 Lecture 3: Action, Hamilton-Jacobi Theory Starred sections are advanced topics for interest and future reference. The unstarred material will not be tested on the final
Chaos in Hamiltonian systems
 Chaos in Hamiltonian systems Teemu Laakso April 26, 2013 Course material: Chapter 7 from Ott 1993/2002, Chaos in Dynamical Systems, Cambridge http://matriisi.ee.tut.fi/courses/mat-35006 Useful reading:
Chaos in Hamiltonian systems Teemu Laakso April 26, 2013 Course material: Chapter 7 from Ott 1993/2002, Chaos in Dynamical Systems, Cambridge http://matriisi.ee.tut.fi/courses/mat-35006 Useful reading:
Oscillatory Motion. Simple pendulum: linear Hooke s Law restoring force for small angular deviations. small angle approximation. Oscillatory solution
 Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ small angle approximation θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic
Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ small angle approximation θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic
Oscillatory Motion. Simple pendulum: linear Hooke s Law restoring force for small angular deviations. Oscillatory solution
 Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic angular frequency
Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic angular frequency
Lecture 8 Phase Space, Part 2. 1 Surfaces of section. MATH-GA Mechanics
 Lecture 8 Phase Space, Part 2 MATH-GA 2710.001 Mechanics 1 Surfaces of section Thus far, we have highlighted the value of phase portraits, and seen that valuable information can be extracted by looking
Lecture 8 Phase Space, Part 2 MATH-GA 2710.001 Mechanics 1 Surfaces of section Thus far, we have highlighted the value of phase portraits, and seen that valuable information can be extracted by looking
for changing independent variables. Most simply for a function f(x) the Legendre transformation f(x) B(s) takes the form B(s) = xs f(x) with s = df
 the Legendre transformation f(x) B(s) takes the form B(s) = xs f(x) with s = df") Physics 106a, Caltech 1 November, 2018 Lecture 10: Hamiltonian Mechanics I The Hamiltonian In the Hamiltonian formulation of dynamics each second order ODE given by the Euler- Lagrange equation in terms
Physics 106a, Caltech 1 November, 2018 Lecture 10: Hamiltonian Mechanics I The Hamiltonian In the Hamiltonian formulation of dynamics each second order ODE given by the Euler- Lagrange equation in terms
Hamiltonian Chaos and the standard map
 Hamiltonian Chaos and the standard map Outline: What happens for small perturbation? Questions of long time stability? Poincare section and twist maps. Area preserving mappings. Standard map as time sections
Hamiltonian Chaos and the standard map Outline: What happens for small perturbation? Questions of long time stability? Poincare section and twist maps. Area preserving mappings. Standard map as time sections
2 Canonical quantization
 Phys540.nb 7 Canonical quantization.1. Lagrangian mechanics and canonical quantization Q: How do we quantize a general system?.1.1.lagrangian Lagrangian mechanics is a reformulation of classical mechanics.
Phys540.nb 7 Canonical quantization.1. Lagrangian mechanics and canonical quantization Q: How do we quantize a general system?.1.1.lagrangian Lagrangian mechanics is a reformulation of classical mechanics.
Theoretical physics. Deterministic chaos in classical physics. Martin Scholtz
 Theoretical physics Deterministic chaos in classical physics Martin Scholtz scholtzzz@gmail.com Fundamental physical theories and role of classical mechanics. Intuitive characteristics of chaos. Newton
Theoretical physics Deterministic chaos in classical physics Martin Scholtz scholtzzz@gmail.com Fundamental physical theories and role of classical mechanics. Intuitive characteristics of chaos. Newton
Area-PReserving Dynamics
 Area-PReserving Dynamics James Meiss University of Colorado at Boulder http://amath.colorado.edu/~jdm/stdmap.html NZMRI Summer Workshop Raglan, New Zealand, January 9 14, 2011 The Standard Map K(θ,t) Frictionless,
Area-PReserving Dynamics James Meiss University of Colorado at Boulder http://amath.colorado.edu/~jdm/stdmap.html NZMRI Summer Workshop Raglan, New Zealand, January 9 14, 2011 The Standard Map K(θ,t) Frictionless,
Time-Dependent Statistical Mechanics 5. The classical atomic fluid, classical mechanics, and classical equilibrium statistical mechanics
 Time-Dependent Statistical Mechanics 5. The classical atomic fluid, classical mechanics, and classical equilibrium statistical mechanics c Hans C. Andersen October 1, 2009 While we know that in principle
Time-Dependent Statistical Mechanics 5. The classical atomic fluid, classical mechanics, and classical equilibrium statistical mechanics c Hans C. Andersen October 1, 2009 While we know that in principle
Introduction to Accelerator Physics Old Dominion University. Nonlinear Dynamics Examples in Accelerator Physics
 Introduction to Accelerator Physics Old Dominion University Nonlinear Dynamics Examples in Accelerator Physics Todd Satogata (Jefferson Lab) email satogata@jlab.org http://www.toddsatogata.net/2011-odu
Introduction to Accelerator Physics Old Dominion University Nonlinear Dynamics Examples in Accelerator Physics Todd Satogata (Jefferson Lab) email satogata@jlab.org http://www.toddsatogata.net/2011-odu
Orbits, Integrals, and Chaos
 Chapter 7 Orbits, Integrals, and Chaos In n space dimensions, some orbits can be formally decomposed into n independent periodic motions. These are the regular orbits; they may be represented as winding
Chapter 7 Orbits, Integrals, and Chaos In n space dimensions, some orbits can be formally decomposed into n independent periodic motions. These are the regular orbits; they may be represented as winding
HAMILTON S PRINCIPLE
 HAMILTON S PRINCIPLE In our previous derivation of Lagrange s equations we started from the Newtonian vector equations of motion and via D Alembert s Principle changed coordinates to generalised coordinates
HAMILTON S PRINCIPLE In our previous derivation of Lagrange s equations we started from the Newtonian vector equations of motion and via D Alembert s Principle changed coordinates to generalised coordinates
Mechanical Resonance and Chaos
 Mechanical Resonance and Chaos You will use the apparatus in Figure 1 to investigate regimes of increasing complexity. Figure 1. The rotary pendulum (from DeSerio, www.phys.ufl.edu/courses/phy483l/group_iv/chaos/chaos.pdf).
Mechanical Resonance and Chaos You will use the apparatus in Figure 1 to investigate regimes of increasing complexity. Figure 1. The rotary pendulum (from DeSerio, www.phys.ufl.edu/courses/phy483l/group_iv/chaos/chaos.pdf).
Lecture 1: A Preliminary to Nonlinear Dynamics and Chaos
 Lecture 1: A Preliminary to Nonlinear Dynamics and Chaos Autonomous Systems A set of coupled autonomous 1st-order ODEs. Here "autonomous" means that the right hand side of the equations does not explicitly
Lecture 1: A Preliminary to Nonlinear Dynamics and Chaos Autonomous Systems A set of coupled autonomous 1st-order ODEs. Here "autonomous" means that the right hand side of the equations does not explicitly
Physics Mechanics. Lecture 32 Oscillations II
 Physics 170 - Mechanics Lecture 32 Oscillations II Gravitational Potential Energy A plot of the gravitational potential energy U g looks like this: Energy Conservation Total mechanical energy of an object
Physics 170 - Mechanics Lecture 32 Oscillations II Gravitational Potential Energy A plot of the gravitational potential energy U g looks like this: Energy Conservation Total mechanical energy of an object
Linear and Nonlinear Oscillators (Lecture 2)
") Linear and Nonlinear Oscillators (Lecture 2) January 25, 2016 7/441 Lecture outline A simple model of a linear oscillator lies in the foundation of many physical phenomena in accelerator dynamics. A typical
Linear and Nonlinear Oscillators (Lecture 2) January 25, 2016 7/441 Lecture outline A simple model of a linear oscillator lies in the foundation of many physical phenomena in accelerator dynamics. A typical
Pentahedral Volume, Chaos, and Quantum Gravity
 Pentahedral Volume, Chaos, and Quantum Gravity Hal Haggard May 30, 2012 Volume Polyhedral Volume (Bianchi, Doná and Speziale): ˆV Pol = The volume of a quantum polyhedron Outline 1 Pentahedral Volume 2
Pentahedral Volume, Chaos, and Quantum Gravity Hal Haggard May 30, 2012 Volume Polyhedral Volume (Bianchi, Doná and Speziale): ˆV Pol = The volume of a quantum polyhedron Outline 1 Pentahedral Volume 2
PHYS2330 Intermediate Mechanics Fall Final Exam Tuesday, 21 Dec 2010
 Name: PHYS2330 Intermediate Mechanics Fall 2010 Final Exam Tuesday, 21 Dec 2010 This exam has two parts. Part I has 20 multiple choice questions, worth two points each. Part II consists of six relatively
Name: PHYS2330 Intermediate Mechanics Fall 2010 Final Exam Tuesday, 21 Dec 2010 This exam has two parts. Part I has 20 multiple choice questions, worth two points each. Part II consists of six relatively
Second quantization: where quantization and particles come from?
 110 Phys460.nb 7 Second quantization: where quantization and particles come from? 7.1. Lagrangian mechanics and canonical quantization Q: How do we quantize a general system? 7.1.1.Lagrangian Lagrangian
110 Phys460.nb 7 Second quantization: where quantization and particles come from? 7.1. Lagrangian mechanics and canonical quantization Q: How do we quantize a general system? 7.1.1.Lagrangian Lagrangian
Theory of Adiabatic Invariants A SOCRATES Lecture Course at the Physics Department, University of Marburg, Germany, February 2004
 Preprint CAMTP/03-8 August 2003 Theory of Adiabatic Invariants A SOCRATES Lecture Course at the Physics Department, University of Marburg, Germany, February 2004 Marko Robnik CAMTP - Center for Applied
Preprint CAMTP/03-8 August 2003 Theory of Adiabatic Invariants A SOCRATES Lecture Course at the Physics Department, University of Marburg, Germany, February 2004 Marko Robnik CAMTP - Center for Applied
Nonlinear Single-Particle Dynamics in High Energy Accelerators
 Nonlinear Single-Particle Dynamics in High Energy Accelerators Part 4: Canonical Perturbation Theory Nonlinear Single-Particle Dynamics in High Energy Accelerators There are six lectures in this course
Nonlinear Single-Particle Dynamics in High Energy Accelerators Part 4: Canonical Perturbation Theory Nonlinear Single-Particle Dynamics in High Energy Accelerators There are six lectures in this course
Under evolution for a small time δt the area A(t) = q p evolves into an area
 = q p evolves into an area") Physics 106a, Caltech 6 November, 2018 Lecture 11: Hamiltonian Mechanics II Towards statistical mechanics Phase space volumes are conserved by Hamiltonian dynamics We can use many nearby initial conditions
Physics 106a, Caltech 6 November, 2018 Lecture 11: Hamiltonian Mechanics II Towards statistical mechanics Phase space volumes are conserved by Hamiltonian dynamics We can use many nearby initial conditions
REVIEW. Hamilton s principle. based on FW-18. Variational statement of mechanics: (for conservative forces) action Equivalent to Newton s laws!
 action Equivalent to Newton s laws!") Hamilton s principle Variational statement of mechanics: (for conservative forces) action Equivalent to Newton s laws! based on FW-18 REVIEW the particle takes the path that minimizes the integrated difference
Hamilton s principle Variational statement of mechanics: (for conservative forces) action Equivalent to Newton s laws! based on FW-18 REVIEW the particle takes the path that minimizes the integrated difference
Introduction to Applied Nonlinear Dynamical Systems and Chaos
 Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Hamiltonian Chaos. Niraj Srivastava, Charles Kaufman, and Gerhard Müller. Department of Physics, University of Rhode Island, Kingston, RI
 Hamiltonian Chaos Niraj Srivastava, Charles Kaufman, and Gerhard Müller Department of Physics, University of Rhode Island, Kingston, RI 02881-0817. Cartesian coordinates, generalized coordinates, canonical
Hamiltonian Chaos Niraj Srivastava, Charles Kaufman, and Gerhard Müller Department of Physics, University of Rhode Island, Kingston, RI 02881-0817. Cartesian coordinates, generalized coordinates, canonical
MAS212 Assignment #2: The damped driven pendulum
 MAS Assignment #: The damped driven pendulum Sam Dolan (January 8 Introduction In this assignment we study the motion of a rigid pendulum of length l and mass m, shown in Fig., using both analytical and
MAS Assignment #: The damped driven pendulum Sam Dolan (January 8 Introduction In this assignment we study the motion of a rigid pendulum of length l and mass m, shown in Fig., using both analytical and
Hamiltonian Lecture notes Part 3
 Hamiltonian Lecture notes Part 3 Alice Quillen March 1, 017 Contents 1 What is a resonance? 1 1.1 Dangers of low order approximations...................... 1. A resonance is a commensurability.......................
Hamiltonian Lecture notes Part 3 Alice Quillen March 1, 017 Contents 1 What is a resonance? 1 1.1 Dangers of low order approximations...................... 1. A resonance is a commensurability.......................
Sketchy Notes on Lagrangian and Hamiltonian Mechanics
 Sketchy Notes on Lagrangian and Hamiltonian Mechanics Robert Jones Generalized Coordinates Suppose we have some physical system, like a free particle, a pendulum suspended from another pendulum, or a field
Sketchy Notes on Lagrangian and Hamiltonian Mechanics Robert Jones Generalized Coordinates Suppose we have some physical system, like a free particle, a pendulum suspended from another pendulum, or a field
M2A2 Problem Sheet 3 - Hamiltonian Mechanics
 MA Problem Sheet 3 - Hamiltonian Mechanics. The particle in a cone. A particle slides under gravity, inside a smooth circular cone with a vertical axis, z = k x + y. Write down its Lagrangian in a) Cartesian,
MA Problem Sheet 3 - Hamiltonian Mechanics. The particle in a cone. A particle slides under gravity, inside a smooth circular cone with a vertical axis, z = k x + y. Write down its Lagrangian in a) Cartesian,
Physical Dynamics (SPA5304) Lecture Plan 2018
 Lecture Plan 2018") Physical Dynamics (SPA5304) Lecture Plan 2018 The numbers on the left margin are approximate lecture numbers. Items in gray are not covered this year 1 Advanced Review of Newtonian Mechanics 1.1 One Particle
Physical Dynamics (SPA5304) Lecture Plan 2018 The numbers on the left margin are approximate lecture numbers. Items in gray are not covered this year 1 Advanced Review of Newtonian Mechanics 1.1 One Particle
LECTURE 8: DYNAMICAL SYSTEMS 7
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
PHY411 Lecture notes Part 5
 PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
Pseudo-Chaotic Orbits of Kicked Oscillators
 Dynamical Chaos and Non-Equilibrium Statistical Mechanics: From Rigorous Results to Applications in Nano-Systems August, 006 Pseudo-Chaotic Orbits of Kicked Oscillators J. H. Lowenstein, New York University
Dynamical Chaos and Non-Equilibrium Statistical Mechanics: From Rigorous Results to Applications in Nano-Systems August, 006 Pseudo-Chaotic Orbits of Kicked Oscillators J. H. Lowenstein, New York University
GEOMETRIC QUANTIZATION
 GEOMETRIC QUANTIZATION 1. The basic idea The setting of the Hamiltonian version of classical (Newtonian) mechanics is the phase space (position and momentum), which is a symplectic manifold. The typical
GEOMETRIC QUANTIZATION 1. The basic idea The setting of the Hamiltonian version of classical (Newtonian) mechanics is the phase space (position and momentum), which is a symplectic manifold. The typical
Review for Final. elementary mechanics. Lagrangian and Hamiltonian Dynamics. oscillations
 Review for Final elementary mechanics Newtonian mechanics gravitation dynamics of systems of particles Lagrangian and Hamiltonian Dynamics Lagrangian mechanics Variational dynamics Hamiltonian dynamics
Review for Final elementary mechanics Newtonian mechanics gravitation dynamics of systems of particles Lagrangian and Hamiltonian Dynamics Lagrangian mechanics Variational dynamics Hamiltonian dynamics
Physics 106a, Caltech 4 December, Lecture 18: Examples on Rigid Body Dynamics. Rotating rectangle. Heavy symmetric top
 Physics 106a, Caltech 4 December, 2018 Lecture 18: Examples on Rigid Body Dynamics I go through a number of examples illustrating the methods of solving rigid body dynamics. In most cases, the problem
Physics 106a, Caltech 4 December, 2018 Lecture 18: Examples on Rigid Body Dynamics I go through a number of examples illustrating the methods of solving rigid body dynamics. In most cases, the problem
Analytical Mechanics ( AM )
") Analytical Mechanics ( AM ) Olaf Scholten KVI, kamer v8; tel nr 6-55; email: scholten@kvinl Web page: http://wwwkvinl/ scholten Book: Classical Dynamics of Particles and Systems, Stephen T Thornton & Jerry
Analytical Mechanics ( AM ) Olaf Scholten KVI, kamer v8; tel nr 6-55; email: scholten@kvinl Web page: http://wwwkvinl/ scholten Book: Classical Dynamics of Particles and Systems, Stephen T Thornton & Jerry
Hamiltonian flow in phase space and Liouville s theorem (Lecture 5)
") Hamiltonian flow in phase space and Liouville s theorem (Lecture 5) January 26, 2016 90/441 Lecture outline We will discuss the Hamiltonian flow in the phase space. This flow represents a time dependent
Hamiltonian flow in phase space and Liouville s theorem (Lecture 5) January 26, 2016 90/441 Lecture outline We will discuss the Hamiltonian flow in the phase space. This flow represents a time dependent
NONLINEAR DYNAMICS AND CHAOS. Numerical integration. Stability analysis
 LECTURE 3: FLOWS NONLINEAR DYNAMICS AND CHAOS Patrick E McSharr Sstems Analsis, Modelling & Prediction Group www.eng.o.ac.uk/samp patrick@mcsharr.net Tel: +44 83 74 Numerical integration Stabilit analsis
LECTURE 3: FLOWS NONLINEAR DYNAMICS AND CHAOS Patrick E McSharr Sstems Analsis, Modelling & Prediction Group www.eng.o.ac.uk/samp patrick@mcsharr.net Tel: +44 83 74 Numerical integration Stabilit analsis
Lecture 20: ODE V - Examples in Physics
 Lecture 20: ODE V - Examples in Physics Helmholtz oscillator The system. A particle of mass is moving in a potential field. Set up the equation of motion. (1.1) (1.2) (1.4) (1.5) Fixed points Linear stability
Lecture 20: ODE V - Examples in Physics Helmholtz oscillator The system. A particle of mass is moving in a potential field. Set up the equation of motion. (1.1) (1.2) (1.4) (1.5) Fixed points Linear stability
NORMAL MODES, WAVE MOTION AND THE WAVE EQUATION. Professor G.G.Ross. Oxford University Hilary Term 2009
 NORMAL MODES, WAVE MOTION AND THE WAVE EQUATION Professor G.G.Ross Oxford University Hilary Term 009 This course of twelve lectures covers material for the paper CP4: Differential Equations, Waves and
NORMAL MODES, WAVE MOTION AND THE WAVE EQUATION Professor G.G.Ross Oxford University Hilary Term 009 This course of twelve lectures covers material for the paper CP4: Differential Equations, Waves and
Symplectic maps. James D. Meiss. March 4, 2008
 Symplectic maps James D. Meiss March 4, 2008 First used mathematically by Hermann Weyl, the term symplectic arises from a Greek word that means twining or plaiting together. This is apt, as symplectic
Symplectic maps James D. Meiss March 4, 2008 First used mathematically by Hermann Weyl, the term symplectic arises from a Greek word that means twining or plaiting together. This is apt, as symplectic
Physics 5153 Classical Mechanics. Canonical Transformations-1
 1 Introduction Physics 5153 Classical Mechanics Canonical Transformations The choice of generalized coordinates used to describe a physical system is completely arbitrary, but the Lagrangian is invariant
1 Introduction Physics 5153 Classical Mechanics Canonical Transformations The choice of generalized coordinates used to describe a physical system is completely arbitrary, but the Lagrangian is invariant
PH 120 Project # 2: Pendulum and chaos
 PH 120 Project # 2: Pendulum and chaos Due: Friday, January 16, 2004 In PH109, you studied a simple pendulum, which is an effectively massless rod of length l that is fixed at one end with a small mass
PH 120 Project # 2: Pendulum and chaos Due: Friday, January 16, 2004 In PH109, you studied a simple pendulum, which is an effectively massless rod of length l that is fixed at one end with a small mass
Canonical transformations (Lecture 4)
") Canonical transformations (Lecture 4) January 26, 2016 61/441 Lecture outline We will introduce and discuss canonical transformations that conserve the Hamiltonian structure of equations of motion. Poisson
Canonical transformations (Lecture 4) January 26, 2016 61/441 Lecture outline We will introduce and discuss canonical transformations that conserve the Hamiltonian structure of equations of motion. Poisson
Transitioning to Chaos in a Simple Mechanical Oscillator
 Transitioning to Chaos in a Simple Mechanical Oscillator Hwan Bae Physics Department, The College of Wooster, Wooster, Ohio 69, USA (Dated: May 9, 8) We vary the magnetic damping, driver frequency, and
Transitioning to Chaos in a Simple Mechanical Oscillator Hwan Bae Physics Department, The College of Wooster, Wooster, Ohio 69, USA (Dated: May 9, 8) We vary the magnetic damping, driver frequency, and
University Physics 226N/231N Old Dominion University. Chapter 14: Oscillatory Motion
 University Physics 226N/231N Old Dominion University Chapter 14: Oscillatory Motion Dr. Todd Satogata (ODU/Jefferson Lab) satogata@jlab.org http://www.toddsatogata.net/2016-odu Monday, November 5, 2016
University Physics 226N/231N Old Dominion University Chapter 14: Oscillatory Motion Dr. Todd Satogata (ODU/Jefferson Lab) satogata@jlab.org http://www.toddsatogata.net/2016-odu Monday, November 5, 2016
OSCILLATIONS ABOUT EQUILIBRIUM
 OSCILLATIONS ABOUT EQUILIBRIUM Chapter 13 Units of Chapter 13 Periodic Motion Simple Harmonic Motion Connections between Uniform Circular Motion and Simple Harmonic Motion The Period of a Mass on a Spring
OSCILLATIONS ABOUT EQUILIBRIUM Chapter 13 Units of Chapter 13 Periodic Motion Simple Harmonic Motion Connections between Uniform Circular Motion and Simple Harmonic Motion The Period of a Mass on a Spring
Chaos in the Hénon-Heiles system
 Chaos in the Hénon-Heiles system University of Karlstad Christian Emanuelsson Analytical Mechanics FYGC04 Abstract This paper briefly describes how the Hénon-Helies system exhibits chaos. First some subjects
Chaos in the Hénon-Heiles system University of Karlstad Christian Emanuelsson Analytical Mechanics FYGC04 Abstract This paper briefly describes how the Hénon-Helies system exhibits chaos. First some subjects
Nonlinear Oscillators: Free Response
 20 Nonlinear Oscillators: Free Response Tools Used in Lab 20 Pendulums To the Instructor: This lab is just an introduction to the nonlinear phase portraits, but the connection between phase portraits and
20 Nonlinear Oscillators: Free Response Tools Used in Lab 20 Pendulums To the Instructor: This lab is just an introduction to the nonlinear phase portraits, but the connection between phase portraits and
M. van Berkel DCT
 Explicit solution of the ODEs describing the 3 DOF Control Moment Gyroscope M. van Berkel DCT 28.14 Traineeship report Coach(es): Supervisor: dr. N. Sakamoto Prof. dr. H. Nijmeijer Technische Universiteit
Explicit solution of the ODEs describing the 3 DOF Control Moment Gyroscope M. van Berkel DCT 28.14 Traineeship report Coach(es): Supervisor: dr. N. Sakamoto Prof. dr. H. Nijmeijer Technische Universiteit
PHYSICS 311: Classical Mechanics Final Exam Solution Key (2017)
") PHYSICS 311: Classical Mechanics Final Exam Solution Key (017) 1. [5 points] Short Answers (5 points each) (a) In a sentence or two, explain why bicycle wheels are large, with all of the mass at the edge,
PHYSICS 311: Classical Mechanics Final Exam Solution Key (017) 1. [5 points] Short Answers (5 points each) (a) In a sentence or two, explain why bicycle wheels are large, with all of the mass at the edge,
PHYS2100: Hamiltonian dynamics and chaos. M. J. Davis
 PHYS2100: Hamiltonian dynamics and chaos M. J. Davis September 2006 Chapter 1 Introduction Lecturer: Dr Matthew Davis. Room: 6-403 (Physics Annexe, ARC Centre of Excellence for Quantum-Atom Optics) Phone:
PHYS2100: Hamiltonian dynamics and chaos M. J. Davis September 2006 Chapter 1 Introduction Lecturer: Dr Matthew Davis. Room: 6-403 (Physics Annexe, ARC Centre of Excellence for Quantum-Atom Optics) Phone:
Chapter 29. Quantum Chaos
 Chapter 29 Quantum Chaos What happens to a Hamiltonian system that for classical mechanics is chaotic when we include a nonzero h? There is no problem in principle to answering this question: given a classical
Chapter 29 Quantum Chaos What happens to a Hamiltonian system that for classical mechanics is chaotic when we include a nonzero h? There is no problem in principle to answering this question: given a classical
An introduction to Birkhoff normal form
 An introduction to Birkhoff normal form Dario Bambusi Dipartimento di Matematica, Universitá di Milano via Saldini 50, 0133 Milano (Italy) 19.11.14 1 Introduction The aim of this note is to present an
An introduction to Birkhoff normal form Dario Bambusi Dipartimento di Matematica, Universitá di Milano via Saldini 50, 0133 Milano (Italy) 19.11.14 1 Introduction The aim of this note is to present an
Multiperiodic dynamics overview and some recent results
 Multiperiodic dynamics overview and some recent results Henk Broer Rijksuniversiteit Groningen Instituut voor Wiskunde en Informatica POBox 800 9700 AV Groningen email: broer@math.rug.nl URL: http://www.math.rug.nl/~broer
Multiperiodic dynamics overview and some recent results Henk Broer Rijksuniversiteit Groningen Instituut voor Wiskunde en Informatica POBox 800 9700 AV Groningen email: broer@math.rug.nl URL: http://www.math.rug.nl/~broer
Chaotic transport through the solar system
 The Interplanetary Superhighway Chaotic transport through the solar system Richard Taylor rtaylor@tru.ca TRU Math Seminar, April 12, 2006 p. 1 The N -Body Problem N masses interact via mutual gravitational
The Interplanetary Superhighway Chaotic transport through the solar system Richard Taylor rtaylor@tru.ca TRU Math Seminar, April 12, 2006 p. 1 The N -Body Problem N masses interact via mutual gravitational
Chapter 14 Oscillations. Copyright 2009 Pearson Education, Inc.
 Chapter 14 Oscillations Oscillations of a Spring Simple Harmonic Motion Energy in the Simple Harmonic Oscillator Simple Harmonic Motion Related to Uniform Circular Motion The Simple Pendulum The Physical
Chapter 14 Oscillations Oscillations of a Spring Simple Harmonic Motion Energy in the Simple Harmonic Oscillator Simple Harmonic Motion Related to Uniform Circular Motion The Simple Pendulum The Physical
2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity
 2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity Energy 7 4 Kinematics Free fall Collisions 3 5 Dynamics
2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity Energy 7 4 Kinematics Free fall Collisions 3 5 Dynamics
Use conserved quantities to reduce number of variables and the equation of motion (EOM)
") Physics 106a, Caltech 5 October, 018 Lecture 8: Central Forces Bound States Today we discuss the Kepler problem of the orbital motion of planets and other objects in the gravitational field of the sun.
Physics 106a, Caltech 5 October, 018 Lecture 8: Central Forces Bound States Today we discuss the Kepler problem of the orbital motion of planets and other objects in the gravitational field of the sun.
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10)
 Fake Past Exam (TT 10)") Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Symmetries. x = x + y k 2π sin(2πx), y = y k. 2π sin(2πx t). (3)
, y = y k. 2π sin(2πx t). (3)") The standard or Taylor Chirikov map is a family of area-preserving maps, z = f(z)where z = (x, y) is the original position and z = (x,y ) the new position after application of the map, which is defined
The standard or Taylor Chirikov map is a family of area-preserving maps, z = f(z)where z = (x, y) is the original position and z = (x,y ) the new position after application of the map, which is defined
L(q, q) = m 2 q2 V (q) 2 m + V (q)
 = m 2 q2 V (q) 2 m + V (q)") Lecture 7 Phase Space, Part 1 MATH-GA 71.1 Mechanics 1 Phase portraits 1.1 One dimensional system Consider the generic one dimensional case of a point mass m described by a generalized coordinate q and
Lecture 7 Phase Space, Part 1 MATH-GA 71.1 Mechanics 1 Phase portraits 1.1 One dimensional system Consider the generic one dimensional case of a point mass m described by a generalized coordinate q and
MATHEMATICAL PHYSICS
 MATHEMATICAL PHYSICS Third Year SEMESTER 1 015 016 Classical Mechanics MP350 Prof. S. J. Hands, Prof. D. M. Heffernan, Dr. J.-I. Skullerud and Dr. M. Fremling Time allowed: 1 1 hours Answer two questions
MATHEMATICAL PHYSICS Third Year SEMESTER 1 015 016 Classical Mechanics MP350 Prof. S. J. Hands, Prof. D. M. Heffernan, Dr. J.-I. Skullerud and Dr. M. Fremling Time allowed: 1 1 hours Answer two questions
The... of a particle is defined as its change in position in some time interval.
 Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Chapter 15 - Oscillations
 The pendulum of the mind oscillates between sense and nonsense, not between right and wrong. -Carl Gustav Jung David J. Starling Penn State Hazleton PHYS 211 Oscillatory motion is motion that is periodic
The pendulum of the mind oscillates between sense and nonsense, not between right and wrong. -Carl Gustav Jung David J. Starling Penn State Hazleton PHYS 211 Oscillatory motion is motion that is periodic
Lectures on Dynamical Systems. Anatoly Neishtadt
 Lectures on Dynamical Systems Anatoly Neishtadt Lectures for Mathematics Access Grid Instruction and Collaboration (MAGIC) consortium, Loughborough University, 2007 Part 3 LECTURE 14 NORMAL FORMS Resonances
Lectures on Dynamical Systems Anatoly Neishtadt Lectures for Mathematics Access Grid Instruction and Collaboration (MAGIC) consortium, Loughborough University, 2007 Part 3 LECTURE 14 NORMAL FORMS Resonances
28. Pendulum phase portrait Draw the phase portrait for the pendulum (supported by an inextensible rod)
") 28. Pendulum phase portrait Draw the phase portrait for the pendulum (supported by an inextensible rod) θ + ω 2 sin θ = 0. Indicate the stable equilibrium points as well as the unstable equilibrium points.
28. Pendulum phase portrait Draw the phase portrait for the pendulum (supported by an inextensible rod) θ + ω 2 sin θ = 0. Indicate the stable equilibrium points as well as the unstable equilibrium points.
A Classical Approach to the Stark-Effect. Mridul Mehta Advisor: Prof. Enrique J. Galvez Physics Dept., Colgate University
 A Classical Approach to the Stark-Effect Mridul Mehta Advisor: Prof. Enrique J. Galvez Physics Dept., Colgate University Abstract The state of an atom in the presence of an external electric field is known
A Classical Approach to the Stark-Effect Mridul Mehta Advisor: Prof. Enrique J. Galvez Physics Dept., Colgate University Abstract The state of an atom in the presence of an external electric field is known
ON THE BREAK-UP OF INVARIANT TORI WITH THREE FREQUENCIES
 ON THE BREAK-UP OF INVARIANT TORI WITH THREE FREQUENCIES J.D. MEISS Program in Applied Mathematics University of Colorado Boulder, CO Abstract We construct an approximate renormalization operator for a
ON THE BREAK-UP OF INVARIANT TORI WITH THREE FREQUENCIES J.D. MEISS Program in Applied Mathematics University of Colorado Boulder, CO Abstract We construct an approximate renormalization operator for a
Structural Dynamics Lecture 2. Outline of Lecture 2. Single-Degree-of-Freedom Systems (cont.)
") Outline of Single-Degree-of-Freedom Systems (cont.) Linear Viscous Damped Eigenvibrations. Logarithmic decrement. Response to Harmonic and Periodic Loads. 1 Single-Degreee-of-Freedom Systems (cont.). Linear
Outline of Single-Degree-of-Freedom Systems (cont.) Linear Viscous Damped Eigenvibrations. Logarithmic decrement. Response to Harmonic and Periodic Loads. 1 Single-Degreee-of-Freedom Systems (cont.). Linear
1. Introductory Examples
 1. Introductory Examples We introduce the concept of the deterministic and stochastic simulation methods. Two problems are provided to explain the methods: the percolation problem, providing an example
1. Introductory Examples We introduce the concept of the deterministic and stochastic simulation methods. Two problems are provided to explain the methods: the percolation problem, providing an example
Hamiltonian Systems and Chaos Overview Liz Lane-Harvard, Melissa Swager
 Hamiltonian Systems and Chaos Overview Liz Lane-Harvard, Melissa Swager Abstract: In this paper we will give an overview of Hamiltonian systems with specific examples, including the classical pendulum
Hamiltonian Systems and Chaos Overview Liz Lane-Harvard, Melissa Swager Abstract: In this paper we will give an overview of Hamiltonian systems with specific examples, including the classical pendulum
Oscillator Homework Problems
 Oscillator Homework Problems Michael Fowler 3//7 1 Dimensional exercises: use dimensions to find a characteristic time for an undamped simple harmonic oscillator, and a pendulum Why does the dimensional
Oscillator Homework Problems Michael Fowler 3//7 1 Dimensional exercises: use dimensions to find a characteristic time for an undamped simple harmonic oscillator, and a pendulum Why does the dimensional
Newton s laws. Chapter 1. Not: Quantum Mechanics / Relativistic Mechanics
 PHYB54 Revision Chapter 1 Newton s laws Not: Quantum Mechanics / Relativistic Mechanics Isaac Newton 1642-1727 Classical mechanics breaks down if: 1) high speed, v ~ c 2) microscopic/elementary particles
PHYB54 Revision Chapter 1 Newton s laws Not: Quantum Mechanics / Relativistic Mechanics Isaac Newton 1642-1727 Classical mechanics breaks down if: 1) high speed, v ~ c 2) microscopic/elementary particles
Work, Power, and Energy Lecture 8
 Work, Power, and Energy Lecture 8 ˆ Back to Earth... ˆ We return to a topic touched on previously: the mechanical advantage of simple machines. In this way we will motivate the definitions of work, power,
Work, Power, and Energy Lecture 8 ˆ Back to Earth... ˆ We return to a topic touched on previously: the mechanical advantage of simple machines. In this way we will motivate the definitions of work, power,
General Physics I. Lecture 12: Applications of Oscillatory Motion. Prof. WAN, Xin ( 万歆 )
") General Physics I Lecture 1: Applications of Oscillatory Motion Prof. WAN, Xin ( 万歆 ) inwan@zju.edu.cn http://zimp.zju.edu.cn/~inwan/ Outline The pendulum Comparing simple harmonic motion and uniform circular
General Physics I Lecture 1: Applications of Oscillatory Motion Prof. WAN, Xin ( 万歆 ) inwan@zju.edu.cn http://zimp.zju.edu.cn/~inwan/ Outline The pendulum Comparing simple harmonic motion and uniform circular
An Exactly Solvable 3 Body Problem
 An Exactly Solvable 3 Body Problem The most famous n-body problem is one where particles interact by an inverse square-law force. However, there is a class of exactly solvable n-body problems in which
An Exactly Solvable 3 Body Problem The most famous n-body problem is one where particles interact by an inverse square-law force. However, there is a class of exactly solvable n-body problems in which
Chaos Theory. Namit Anand Y Integrated M.Sc.( ) Under the guidance of. Prof. S.C. Phatak. Center for Excellence in Basic Sciences
 Under the guidance of. Prof. S.C. Phatak. Center for Excellence in Basic Sciences") Chaos Theory Namit Anand Y1111033 Integrated M.Sc.(2011-2016) Under the guidance of Prof. S.C. Phatak Center for Excellence in Basic Sciences University of Mumbai 1 Contents 1 Abstract 3 1.1 Basic Definitions
Chaos Theory Namit Anand Y1111033 Integrated M.Sc.(2011-2016) Under the guidance of Prof. S.C. Phatak Center for Excellence in Basic Sciences University of Mumbai 1 Contents 1 Abstract 3 1.1 Basic Definitions
NIU PHYS 500, Fall 2006 Classical Mechanics Solutions for HW6. Solutions
 NIU PHYS 500, Fall 006 Classical Mechanics Solutions for HW6 Assignment: HW6 [40 points] Assigned: 006/11/10 Due: 006/11/17 Solutions P6.1 [4 + 3 + 3 = 10 points] Consider a particle of mass m moving in
NIU PHYS 500, Fall 006 Classical Mechanics Solutions for HW6 Assignment: HW6 [40 points] Assigned: 006/11/10 Due: 006/11/17 Solutions P6.1 [4 + 3 + 3 = 10 points] Consider a particle of mass m moving in
Theory of mean motion resonances.
 Theory of mean motion resonances. Mean motion resonances are ubiquitous in space. They can be found between planets and asteroids, planets and rings in gaseous disks or satellites and planetary rings.
Theory of mean motion resonances. Mean motion resonances are ubiquitous in space. They can be found between planets and asteroids, planets and rings in gaseous disks or satellites and planetary rings.
Liouville Equation. q s = H p s
 Liouville Equation In this section we will build a bridge from Classical Mechanics to Statistical Physics. The bridge is Liouville equation. We start with the Hamiltonian formalism of the Classical Mechanics,
Liouville Equation In this section we will build a bridge from Classical Mechanics to Statistical Physics. The bridge is Liouville equation. We start with the Hamiltonian formalism of the Classical Mechanics,
Rigid bodies - general theory
 Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Fourier Series. Green - underdamped
 Harmonic Oscillator Fourier Series Undamped: Green - underdamped Overdamped: Critical: Underdamped: Driven: Calculus of Variations b f {y, y'; x}dx is stationary when f y d f = 0 dx y' a Note that y is
Harmonic Oscillator Fourier Series Undamped: Green - underdamped Overdamped: Critical: Underdamped: Driven: Calculus of Variations b f {y, y'; x}dx is stationary when f y d f = 0 dx y' a Note that y is
Lecture 9: Eigenvalues and Eigenvectors in Classical Mechanics (See Section 3.12 in Boas)
") Lecture 9: Eigenvalues and Eigenvectors in Classical Mechanics (See Section 3 in Boas) As suggested in Lecture 8 the formalism of eigenvalues/eigenvectors has many applications in physics, especially in
Lecture 9: Eigenvalues and Eigenvectors in Classical Mechanics (See Section 3 in Boas) As suggested in Lecture 8 the formalism of eigenvalues/eigenvectors has many applications in physics, especially in
25.1 Ergodicity and Metric Transitivity
 Chapter 25 Ergodicity This lecture explains what it means for a process to be ergodic or metrically transitive, gives a few characterizes of these properties (especially for AMS processes), and deduces
Chapter 25 Ergodicity This lecture explains what it means for a process to be ergodic or metrically transitive, gives a few characterizes of these properties (especially for AMS processes), and deduces
Some Collision solutions of the rectilinear periodically forced Kepler problem
 Advanced Nonlinear Studies 1 (2001), xxx xxx Some Collision solutions of the rectilinear periodically forced Kepler problem Lei Zhao Johann Bernoulli Institute for Mathematics and Computer Science University
Advanced Nonlinear Studies 1 (2001), xxx xxx Some Collision solutions of the rectilinear periodically forced Kepler problem Lei Zhao Johann Bernoulli Institute for Mathematics and Computer Science University
Mechanics IV: Oscillations
 Mechanics IV: Oscillations Chapter 4 of Morin covers oscillations, including damped and driven oscillators in detail. Also see chapter 10 of Kleppner and Kolenkow. For more on normal modes, see any book
Mechanics IV: Oscillations Chapter 4 of Morin covers oscillations, including damped and driven oscillators in detail. Also see chapter 10 of Kleppner and Kolenkow. For more on normal modes, see any book
CHAOS -SOME BASIC CONCEPTS
 CHAOS -SOME BASIC CONCEPTS Anders Ekberg INTRODUCTION This report is my exam of the "Chaos-part" of the course STOCHASTIC VIBRATIONS. I m by no means any expert in the area and may well have misunderstood
CHAOS -SOME BASIC CONCEPTS Anders Ekberg INTRODUCTION This report is my exam of the "Chaos-part" of the course STOCHASTIC VIBRATIONS. I m by no means any expert in the area and may well have misunderstood
Nonlinear Single-Particle Dynamics in High Energy Accelerators
 Nonlinear Single-Particle Dynamics in High Energy Accelerators Part 2: Basic tools and concepts Nonlinear Single-Particle Dynamics in High Energy Accelerators This course consists of eight lectures: 1.
Nonlinear Single-Particle Dynamics in High Energy Accelerators Part 2: Basic tools and concepts Nonlinear Single-Particle Dynamics in High Energy Accelerators This course consists of eight lectures: 1.