A Glance at the Standard Map
|
|
|
- Lora Madeline Wilkins
- 5 years ago
- Views:
Transcription
1 A Glance at the Standard Map by Ryan Tobin Abstract The Standard (Chirikov) Map is studied and various aspects of its intricate dynamics are discussed. Also, a brief discussion of the famous KAM theory that describes the dismemberment of invariant tori and the onset of chaos. Stable/unstable manifolds from a fixed point is portrayed. Introduction Two-dimensional area-preserving map functions have produced many important insights into nonintegrable Hamiltonian systems that would be too complicated to study otherwise. These maps approximate a Poincaré section for Hamiltonian systems. The interesting dynamics of these 2-D maps provide theoritical framework that can be applied to many areas of physics. One pioneer in this work, Boris Chirikov, contributed much progress to the understanding of chaos in Hamiltonian systems. He also developed the Standard (Taylor-Chirikov) areapreserving map defined as (in this paper): θ n+ 1 = θ n +p n+ 1 f, modulo 1 p n+ 1 =p n +K/(2π)sin(2πθ n ) g, modulo 1 (1) In this way the mappings always reside on the unit square. This map was first discovered by Bray Taylor and then was later proposed by Boris Chirkov to model magnetic field lines. θ and p can be considered to respectively represent the position and momentum of a pendulum with an impulsive torque Ksin(x) at the end of the pendulum. K represents the amplitude of the kicks and determines the extent of nonlinearity of the system. The mapping (1) exhibits various properties, at least locally, of many different systems. The measure of nonlinearity, K, influences the amount of chaos in the dynamics. This map is an example of an area-preserving map because the area of the phase space never shrinks or expands as is shown by computing the determinant of the Jacobian. det J = f θ n g θ n f p n = g p n (1 + Kcos(2πθ n ) 1 Kcos(2πθ n ) 1 = 1. (2) Since, it is equal to one there is no shrinking or stretching.
2 Periodic/Quasiperiodic Orbits Consider the case when K = 0. (1) reduces to p n+ 1 =p n, (mod 1) θ n+ 1 = θ n +p n+ 1, (mod 1) (3) which is integrable and has the obvious solution θ n = θ 0 +np 0 (mod 1)and p n =p 0 (mod 1). Every orbit lies on an invariant torus. The orbits can exhibit periodic or quasiperiodic behavior depending on the initial conditions. If p 0 =M/N for some M,N integers, then trajectory is a period-n orbit. Otherwise, for irrational p 0 the orbit is quasiperiodic and densely fill in the torus.
 A plot of many quasiperiodic orbits If K is slightly perturbed from 0, we can see that the basic structure is maintained.")
3 Figure 1: (TOP) A plot of several trajectories for the case with no nonlinear dependence. The trajectories start with P0 = π/4, 3/4, π/6, ½, ¼, π/15, 1/5. Notice the fixed period-n orbits. (BOTTOM) A plot of many quasiperiodic orbits If K is slightly perturbed from 0, we can see that the basic structure is maintained. It seems that the orbits still traverse horizontally and densely fill the torus. For small K, (1) can be approximated well by derivative, and thus the dynamics are still integrable and most of the invariant tori remain for sufficiently small K.
.")

4 Figure 2: A plot of many trajectories for K=0.2 and K=0.4. Notice the nonlinear resonances begin to form and grow with K. Nonlinear Resonance We notice that not all of the orbits are part of invariant tori. In fact, we actually some ellipses encircling the period-1 fixed point at (0.5, 0). I will refer to such circles as islands. These circles don t rotate the torus and are bounded by a separatrix curve that segregates the different types of orbits. We can see that Figure 2 closely resembles the phase space of a pendulum. For small K the size of the island increases with K. Also, for increasing K, the island seams to disfigure into an almost increasingly sinusoidal stretching, if it can be called that.
5 Fixed Points and Linearization The fixed points of the pendulum lie at antipodal ends corresponding to θ=0,.5 and p=0. We see that this also appears true in figure 2. θ = θ + p, (mod 1) p = p + K/2πsin(2πθ), (mod 1) (4) The fixed points are θ=0,.5 and p=0. Directly analogous to the simple pendulum. Since det(j) = 1, the eigenvalues, and thus the stability, of the fixed points are completely determined by Tr(J). Tr(J) = 2+Kcos(2π θ). (5) We can classify the stability of the fixed points based on the eigenvalues and corresponding eigenvectors of the linearized Jacobian (Strogatz). So, λ 1,2 = ½ Tr J ± Tr J) 2 4Δ = ½ 2 + Kcos(2π θ) ± K 2 cos 2 2π θ + 4Kcos(2π θ) v 1,2 = 1 K 2 cos(2π θ) ±½ K2 cos 2 2π θ +4Kcos(2π θ) (6) and Tr(J) < 2 implies fixed point is a center, while Tr(J) > 2 implies fixed point is a saddle point. We find that (0,0) is unstable for K > 0 and (.5,0) stable for 0 < K < 4. These remarks are somewhat apparent in Figure 2. Twist Dynamics One way to get a feel for the way the maps dynamics behave is by looking at its twist features. It can be noticed that the displacement between successive θ increases with increasing p. This is better understood by plotting a line segment of initial conditions for only several iterations. Figure 3 shows how successive iterations tend to twist about the fixed points. Manifolds For each period-n orbit, there are corresponding stable and unstable directions that protrude from the fixed point. For example, a saddle point is evidently at the origin. From stable/unstable manifold theory, we can conjecture that there are manifolds that protrude
 Where n represents the nth iterate of the standard mapping function f.")
6 from these fixed points and trajectory that has an initial value on the manifold will remain on the manifold indefinitely. The unstable and stable sets, W U and W s, of an invariant set are defined as (7) Where n represents the nth iterate of the standard mapping function f. When represents a saddle point, the eigenvectors point in the directions of the submanifolds. I tried numerous techniques to plot the manifolds and all ended up erroneous. Then I noticed that when I iterated a line segment it would warp until the point where it would start to trace out squiggly lines around the (.5,0) fixed point (figure 4). I tried more iterations and found an iteration that seemed to map out what looked like to me trace out the unstable manifold in the vicinity of the fixed point (figure 5). We can tell it s the unstable manifold because of the eigenvectors. Figure 3: Iteration of an initial line segment. Notice squiggly lines near (.5,0). Also note that this map is shifted to place the fixed point in the middle of the screen. So this point (.5,0), corresponds to the (0,0) point in previous plots.
7 Figure 4: After the same initial conditions iterated 12 times, we can begin to see what looks like the outlines of the unstable manifold. I changed (1) so as to view the period one fixed point in the center of the plot: θ n+ 1 = θ n +p n+ 1 f, modulo 1 p n+ 1 =p n +K/(2π)sin(2πθ n ) g, modulo 1 (8) I tried a very small (of order 1e-4 in length ), dense, initial line segment along the unstable eigen-direction of the period-1 fixed point. The line segment stretched along the heteroclinic orbit and seemed to come around and squiggle along the other eigen-direction (figure 5). It would be interesting to study interaction of the opposing manifolds and it has been done in great detail (Meiss 1992), but I ran out of time to do so.
8 Figure 5: Plot of manifold from iteration of small line segment with slightly larger K. Destruction of Invariant Tori As K increases, the nonlinearity of the system increases. The size of the islands will likewise increase. We can see the region where the invariant tori live, is slowly swallowed up with increasing K. Since an invariant torus exist between two resonances, eventually an heteroclinic trajectory will break through the invariant torus joining the two resonances via their opposing manifolds. But this implies that the invariant torus must break because trajectories cannot overlap in 2D. It was Chirikov who initiated investigations into when this occurred. He created a way to approximate when this happened, which was later improved upon. KAM Theory delves into the study of the moments when the invariant tori are dismembered.


9 Figure 6: We can see that much of the invariant tori in the top image have been destroyed in the bottom. In fact, there are almost no invariant tori left in the bottom figure. KAM Theory The Kolmogorov-Arnold-Moser theorem declares that if the Hamiltonian of a system is nonintegrable, then the only orbits that are not destroyed are orbits with irrational winding numbers that are quasiperiodic. In the 2-D mapping of the Poincaré plane, these trajectories show up as continuous orbits around fixed points. The quasiperiodicity of the trajectories tells that the mapping will never land on the same point the 2D Poincaré plane. This results in a smooth curve (if sufficient quantities of iterations are computed). These orbits are called invariant (KAM) tori.
10 Kam theory predicts that frequencies that are sufficiently irrational correspond to the longest living invariant tori. As the nonlinearity factor, K, is increased, the nonintegrable components of the map become more apparent. The final invariant torus is destroyed at the point where the irrationality of the winding number corresponding to the last quasiperiodic orbit is farthest from rational. This occurs at the golden-mean ( Fractal Structure and Chaos ). Upon zooming in on the edges of some of these nonlinear resonances, we see that there are even smaller islands that mimic the behavior of the larger ones. In fact all this talk of manifolds and invariant tori, can also be seen on this smaller scales as well. There are infinite many fixed points due to the fact that there are infinite many rational numbers corresponding to some period-n orbits. We can see this in this in the different plots of figure 7.

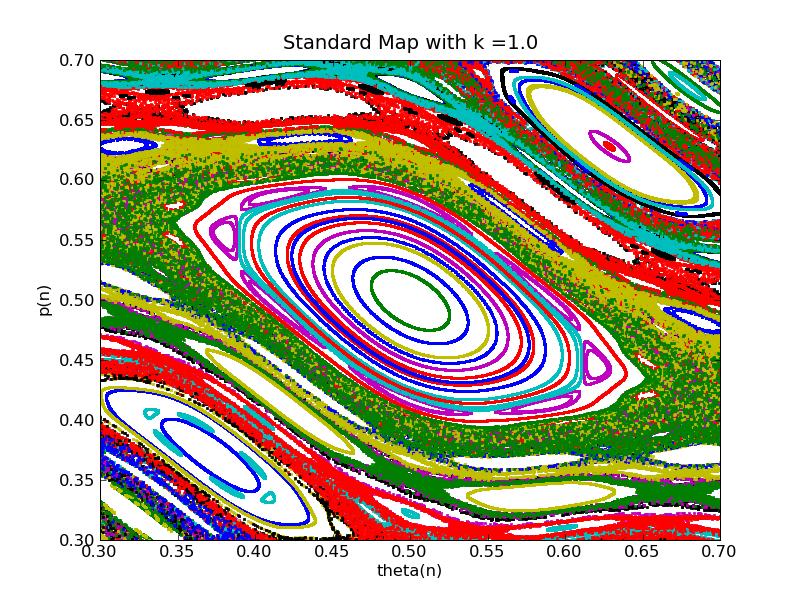
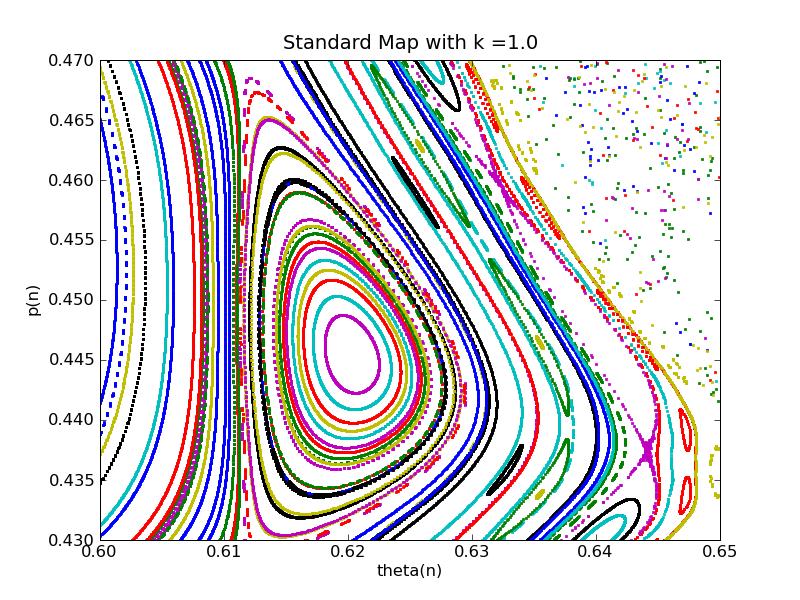
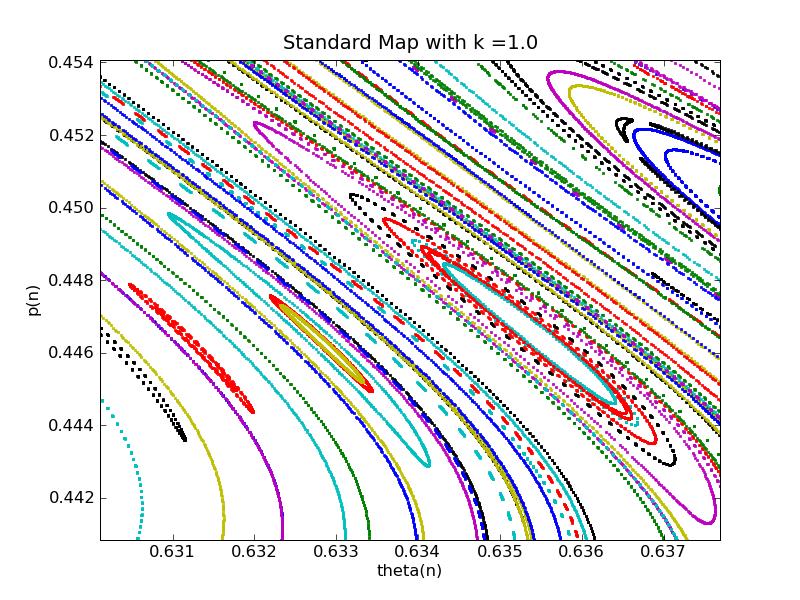
11 Figure 7: Various levels of magnification for K = 1.0.
 A single trajectory demonstrating that chaos has")
12 Figure 8: (TOP) After global chaos has occured. (BOTTOM) A single trajectory demonstrating that chaos has taken over.
13 References Chirikov B.V., "Research concerning the theory of nonlinear resonance and stochasticity", Preprint N 267, Institute of Nuclear Physics, Novosibirsk (1969), (Engl. Trans., CERN Trans (1971)) Meiss, J. D., Simplectic Maps, Variational Principles, and Transport 1992 APS Strogatz, S. Nonlinear Dynamics and Chaos. Reading, MA: Addison-Wesley, 1994
Area-PReserving Dynamics
 Area-PReserving Dynamics James Meiss University of Colorado at Boulder http://amath.colorado.edu/~jdm/stdmap.html NZMRI Summer Workshop Raglan, New Zealand, January 9 14, 2011 The Standard Map K(θ,t) Frictionless,
Area-PReserving Dynamics James Meiss University of Colorado at Boulder http://amath.colorado.edu/~jdm/stdmap.html NZMRI Summer Workshop Raglan, New Zealand, January 9 14, 2011 The Standard Map K(θ,t) Frictionless,
Hamiltonian Chaos and the standard map
 Hamiltonian Chaos and the standard map Outline: What happens for small perturbation? Questions of long time stability? Poincare section and twist maps. Area preserving mappings. Standard map as time sections
Hamiltonian Chaos and the standard map Outline: What happens for small perturbation? Questions of long time stability? Poincare section and twist maps. Area preserving mappings. Standard map as time sections
Physics 106b: Lecture 7 25 January, 2018
 Physics 106b: Lecture 7 25 January, 2018 Hamiltonian Chaos: Introduction Integrable Systems We start with systems that do not exhibit chaos, but instead have simple periodic motion (like the SHO) with
Physics 106b: Lecture 7 25 January, 2018 Hamiltonian Chaos: Introduction Integrable Systems We start with systems that do not exhibit chaos, but instead have simple periodic motion (like the SHO) with
Symmetries. x = x + y k 2π sin(2πx), y = y k. 2π sin(2πx t). (3)
, y = y k. 2π sin(2πx t). (3)") The standard or Taylor Chirikov map is a family of area-preserving maps, z = f(z)where z = (x, y) is the original position and z = (x,y ) the new position after application of the map, which is defined
The standard or Taylor Chirikov map is a family of area-preserving maps, z = f(z)where z = (x, y) is the original position and z = (x,y ) the new position after application of the map, which is defined
Lecture 11 : Overview
 Lecture 11 : Overview Error in Assignment 3 : In Eq. 1, Hamiltonian should be H = p2 r 2m + p2 ϕ 2mr + (p z ea z ) 2 2 2m + eφ (1) Error in lecture 10, slide 7, Eq. (21). Should be S(q, α, t) m Q = β =
Lecture 11 : Overview Error in Assignment 3 : In Eq. 1, Hamiltonian should be H = p2 r 2m + p2 ϕ 2mr + (p z ea z ) 2 2 2m + eφ (1) Error in lecture 10, slide 7, Eq. (21). Should be S(q, α, t) m Q = β =
= 0. = q i., q i = E
 Summary of the Above Newton s second law: d 2 r dt 2 = Φ( r) Complicated vector arithmetic & coordinate system dependence Lagrangian Formalism: L q i d dt ( L q i ) = 0 n second-order differential equations
Summary of the Above Newton s second law: d 2 r dt 2 = Φ( r) Complicated vector arithmetic & coordinate system dependence Lagrangian Formalism: L q i d dt ( L q i ) = 0 n second-order differential equations
Hamiltonian Dynamics
 Hamiltonian Dynamics CDS 140b Joris Vankerschaver jv@caltech.edu CDS Feb. 10, 2009 Joris Vankerschaver (CDS) Hamiltonian Dynamics Feb. 10, 2009 1 / 31 Outline 1. Introductory concepts; 2. Poisson brackets;
Hamiltonian Dynamics CDS 140b Joris Vankerschaver jv@caltech.edu CDS Feb. 10, 2009 Joris Vankerschaver (CDS) Hamiltonian Dynamics Feb. 10, 2009 1 / 31 Outline 1. Introductory concepts; 2. Poisson brackets;
Chaos in the Hénon-Heiles system
 Chaos in the Hénon-Heiles system University of Karlstad Christian Emanuelsson Analytical Mechanics FYGC04 Abstract This paper briefly describes how the Hénon-Helies system exhibits chaos. First some subjects
Chaos in the Hénon-Heiles system University of Karlstad Christian Emanuelsson Analytical Mechanics FYGC04 Abstract This paper briefly describes how the Hénon-Helies system exhibits chaos. First some subjects
Lecture 8 Phase Space, Part 2. 1 Surfaces of section. MATH-GA Mechanics
 Lecture 8 Phase Space, Part 2 MATH-GA 2710.001 Mechanics 1 Surfaces of section Thus far, we have highlighted the value of phase portraits, and seen that valuable information can be extracted by looking
Lecture 8 Phase Space, Part 2 MATH-GA 2710.001 Mechanics 1 Surfaces of section Thus far, we have highlighted the value of phase portraits, and seen that valuable information can be extracted by looking
Chapter 23. Predicting Chaos The Shift Map and Symbolic Dynamics
 Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
Symplectic maps. James D. Meiss. March 4, 2008
 Symplectic maps James D. Meiss March 4, 2008 First used mathematically by Hermann Weyl, the term symplectic arises from a Greek word that means twining or plaiting together. This is apt, as symplectic
Symplectic maps James D. Meiss March 4, 2008 First used mathematically by Hermann Weyl, the term symplectic arises from a Greek word that means twining or plaiting together. This is apt, as symplectic
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10)
 Fake Past Exam (TT 10)") Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Pseudo-Chaotic Orbits of Kicked Oscillators
 Dynamical Chaos and Non-Equilibrium Statistical Mechanics: From Rigorous Results to Applications in Nano-Systems August, 006 Pseudo-Chaotic Orbits of Kicked Oscillators J. H. Lowenstein, New York University
Dynamical Chaos and Non-Equilibrium Statistical Mechanics: From Rigorous Results to Applications in Nano-Systems August, 006 Pseudo-Chaotic Orbits of Kicked Oscillators J. H. Lowenstein, New York University
Chaotic transport through the solar system
 The Interplanetary Superhighway Chaotic transport through the solar system Richard Taylor rtaylor@tru.ca TRU Math Seminar, April 12, 2006 p. 1 The N -Body Problem N masses interact via mutual gravitational
The Interplanetary Superhighway Chaotic transport through the solar system Richard Taylor rtaylor@tru.ca TRU Math Seminar, April 12, 2006 p. 1 The N -Body Problem N masses interact via mutual gravitational
ON THE BREAK-UP OF INVARIANT TORI WITH THREE FREQUENCIES
 ON THE BREAK-UP OF INVARIANT TORI WITH THREE FREQUENCIES J.D. MEISS Program in Applied Mathematics University of Colorado Boulder, CO Abstract We construct an approximate renormalization operator for a
ON THE BREAK-UP OF INVARIANT TORI WITH THREE FREQUENCIES J.D. MEISS Program in Applied Mathematics University of Colorado Boulder, CO Abstract We construct an approximate renormalization operator for a
Nonlinear Single-Particle Dynamics in High Energy Accelerators
 Nonlinear Single-Particle Dynamics in High Energy Accelerators Part 4: Canonical Perturbation Theory Nonlinear Single-Particle Dynamics in High Energy Accelerators There are six lectures in this course
Nonlinear Single-Particle Dynamics in High Energy Accelerators Part 4: Canonical Perturbation Theory Nonlinear Single-Particle Dynamics in High Energy Accelerators There are six lectures in this course
The Transition to Chaos
 Linda E. Reichl The Transition to Chaos Conservative Classical Systems and Quantum Manifestations Second Edition With 180 Illustrations v I.,,-,,t,...,* ', Springer Dedication Acknowledgements v vii 1
Linda E. Reichl The Transition to Chaos Conservative Classical Systems and Quantum Manifestations Second Edition With 180 Illustrations v I.,,-,,t,...,* ', Springer Dedication Acknowledgements v vii 1
Hamiltonian Systems and Chaos Overview Liz Lane-Harvard, Melissa Swager
 Hamiltonian Systems and Chaos Overview Liz Lane-Harvard, Melissa Swager Abstract: In this paper we will give an overview of Hamiltonian systems with specific examples, including the classical pendulum
Hamiltonian Systems and Chaos Overview Liz Lane-Harvard, Melissa Swager Abstract: In this paper we will give an overview of Hamiltonian systems with specific examples, including the classical pendulum
Torus Maps from Weak Coupling of Strong Resonances
 Torus Maps from Weak Coupling of Strong Resonances John Guckenheimer Alexander I. Khibnik October 5, 1999 Abstract This paper investigates a family of diffeomorphisms of the two dimensional torus derived
Torus Maps from Weak Coupling of Strong Resonances John Guckenheimer Alexander I. Khibnik October 5, 1999 Abstract This paper investigates a family of diffeomorphisms of the two dimensional torus derived
Discontinuous standard map dynamics
 Tom Dauer, Meg Doucette, and Shan-Conrad Wolf Summer@ICERM 2015 6 August 2015 Consider a kicked rotator Consider a kicked rotator θ = K n Z δ(t n) sin θ θ = K n Z δ(t n) sin θ p = θ is the angular momentum.
Tom Dauer, Meg Doucette, and Shan-Conrad Wolf Summer@ICERM 2015 6 August 2015 Consider a kicked rotator Consider a kicked rotator θ = K n Z δ(t n) sin θ θ = K n Z δ(t n) sin θ p = θ is the angular momentum.
Chaos in Hamiltonian systems
 Chaos in Hamiltonian systems Teemu Laakso April 26, 2013 Course material: Chapter 7 from Ott 1993/2002, Chaos in Dynamical Systems, Cambridge http://matriisi.ee.tut.fi/courses/mat-35006 Useful reading:
Chaos in Hamiltonian systems Teemu Laakso April 26, 2013 Course material: Chapter 7 from Ott 1993/2002, Chaos in Dynamical Systems, Cambridge http://matriisi.ee.tut.fi/courses/mat-35006 Useful reading:
Vered Rom-Kedar a) The Department of Applied Mathematics and Computer Science, The Weizmann Institute of Science, P.O. Box 26, Rehovot 76100, Israel
 The Department of Applied Mathematics and Computer Science, The Weizmann Institute of Science, P.O. Box 26, Rehovot 76100, Israel") CHAOS VOLUME 9, NUMBER 3 SEPTEMBER 1999 REGULAR ARTICLES Islands of accelerator modes and homoclinic tangles Vered Rom-Kedar a) The Department of Applied Mathematics and Computer Science, The Weizmann
CHAOS VOLUME 9, NUMBER 3 SEPTEMBER 1999 REGULAR ARTICLES Islands of accelerator modes and homoclinic tangles Vered Rom-Kedar a) The Department of Applied Mathematics and Computer Science, The Weizmann
PHY411 Lecture notes Part 5
 PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
Topological Bifurcations of Knotted Tori in Quasiperiodically Driven Oscillators
 Topological Bifurcations of Knotted Tori in Quasiperiodically Driven Oscillators Brian Spears with Andrew Szeri and Michael Hutchings University of California at Berkeley Caltech CDS Seminar October 24,
Topological Bifurcations of Knotted Tori in Quasiperiodically Driven Oscillators Brian Spears with Andrew Szeri and Michael Hutchings University of California at Berkeley Caltech CDS Seminar October 24,
Chaotic motion. Phys 750 Lecture 9
 Chaotic motion Phys 750 Lecture 9 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t =0to
Chaotic motion Phys 750 Lecture 9 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t =0to
Stickiness in Chaos. G.Contopoulos and M. Harsoula Research Center for Astronomy Academy of Athens, Soranou Efesiou 4, Athens
 Stickiness in Chaos G.Contopoulos and M. Harsoula Research Center for Astronomy Academy of Athens, Soranou Efesiou 4, 11527 Athens Abstract We distinguish two types of stickiness in systems of two degrees
Stickiness in Chaos G.Contopoulos and M. Harsoula Research Center for Astronomy Academy of Athens, Soranou Efesiou 4, 11527 Athens Abstract We distinguish two types of stickiness in systems of two degrees
ANALYTICAL MECHANICS. LOUIS N. HAND and JANET D. FINCH CAMBRIDGE UNIVERSITY PRESS
 ANALYTICAL MECHANICS LOUIS N. HAND and JANET D. FINCH CAMBRIDGE UNIVERSITY PRESS Preface xi 1 LAGRANGIAN MECHANICS l 1.1 Example and Review of Newton's Mechanics: A Block Sliding on an Inclined Plane 1
ANALYTICAL MECHANICS LOUIS N. HAND and JANET D. FINCH CAMBRIDGE UNIVERSITY PRESS Preface xi 1 LAGRANGIAN MECHANICS l 1.1 Example and Review of Newton's Mechanics: A Block Sliding on an Inclined Plane 1
Dynamical Systems and Chaos Part I: Theoretical Techniques. Lecture 4: Discrete systems + Chaos. Ilya Potapov Mathematics Department, TUT Room TD325
 Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 14, 2019, at 08 30 12 30 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 14, 2019, at 08 30 12 30 Johanneberg Kristian
Chapter 19. Circle Map Properties for K<1. The one dimensional circle map. x n+1 = x n + K 2π sin 2πx n, (19.1)
") Chapter 19 Circle Map The one dimensional circle map x n+1 = x n + K 2π sin 2πx n, (19.1) where we can collapse values of x to the range 0 x 1, is sufficiently simple that much is known rigorously [1],
Chapter 19 Circle Map The one dimensional circle map x n+1 = x n + K 2π sin 2πx n, (19.1) where we can collapse values of x to the range 0 x 1, is sufficiently simple that much is known rigorously [1],
Analysis of Nonlinear Dynamics by Square Matrix Method
 Analysis of Nonlinear Dynamics by Square Matrix Method Li Hua Yu Brookhaven National Laboratory NOCE, Arcidosso, Sep. 2017 Write one turn map of Taylor expansion as square matrix Simplest example of nonlinear
Analysis of Nonlinear Dynamics by Square Matrix Method Li Hua Yu Brookhaven National Laboratory NOCE, Arcidosso, Sep. 2017 Write one turn map of Taylor expansion as square matrix Simplest example of nonlinear
In Arnold s Mathematical Methods of Classical Mechanics (1), it
, it") Near strongly resonant periodic orbits in a Hamiltonian system Vassili Gelfreich* Mathematics Institute, University of Warwick, Coventry CV4 7AL, United Kingdom Communicated by John N. Mather, Princeton
Near strongly resonant periodic orbits in a Hamiltonian system Vassili Gelfreich* Mathematics Institute, University of Warwick, Coventry CV4 7AL, United Kingdom Communicated by John N. Mather, Princeton
Chaotic motion. Phys 420/580 Lecture 10
 Chaotic motion Phys 420/580 Lecture 10 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t
Chaotic motion Phys 420/580 Lecture 10 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t
Fundamentals of Dynamical Systems / Discrete-Time Models. Dr. Dylan McNamara people.uncw.edu/ mcnamarad
 Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
7 Two-dimensional bifurcations
 7 Two-dimensional bifurcations As in one-dimensional systems: fixed points may be created, destroyed, or change stability as parameters are varied (change of topological equivalence ). In addition closed
7 Two-dimensional bifurcations As in one-dimensional systems: fixed points may be created, destroyed, or change stability as parameters are varied (change of topological equivalence ). In addition closed
April 13, We now extend the structure of the horseshoe to more general kinds of invariant. x (v) λ n v.
 λ n v.") April 3, 005 - Hyperbolic Sets We now extend the structure of the horseshoe to more general kinds of invariant sets. Let r, and let f D r (M) where M is a Riemannian manifold. A compact f invariant set
April 3, 005 - Hyperbolic Sets We now extend the structure of the horseshoe to more general kinds of invariant sets. Let r, and let f D r (M) where M is a Riemannian manifold. A compact f invariant set
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Two models for the parametric forcing of a nonlinear oscillator
 Nonlinear Dyn (007) 50:147 160 DOI 10.1007/s11071-006-9148-3 ORIGINAL ARTICLE Two models for the parametric forcing of a nonlinear oscillator Nazha Abouhazim Mohamed Belhaq Richard H. Rand Received: 3
Nonlinear Dyn (007) 50:147 160 DOI 10.1007/s11071-006-9148-3 ORIGINAL ARTICLE Two models for the parametric forcing of a nonlinear oscillator Nazha Abouhazim Mohamed Belhaq Richard H. Rand Received: 3
Non-Twist Field Line Mappings for Tokamaks with Reversed Magnetic Shear
 Brazilian Journal of Physics, vol. 34, no. 4B, December, 2004 1759 Non-Twist Field Line Mappings for Tokamaks with Reversed Magnetic Shear M. Roberto 1, E. C. da Silva 2, I. L. Caldas 2, and R. L. Viana
Brazilian Journal of Physics, vol. 34, no. 4B, December, 2004 1759 Non-Twist Field Line Mappings for Tokamaks with Reversed Magnetic Shear M. Roberto 1, E. C. da Silva 2, I. L. Caldas 2, and R. L. Viana
AMADEU DELSHAMS AND RAFAEL RAMíREZ-ROS
 POINCARÉ-MELNIKOV-ARNOLD METHOD FOR TWIST MAPS AMADEU DELSHAMS AND RAFAEL RAMíREZ-ROS 1. Introduction A general theory for perturbations of an integrable planar map with a separatrix to a hyperbolic fixed
POINCARÉ-MELNIKOV-ARNOLD METHOD FOR TWIST MAPS AMADEU DELSHAMS AND RAFAEL RAMíREZ-ROS 1. Introduction A general theory for perturbations of an integrable planar map with a separatrix to a hyperbolic fixed
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II.
 Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Introduction to Applied Nonlinear Dynamical Systems and Chaos
 Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Robustly transitive diffeomorphisms
 Robustly transitive diffeomorphisms Todd Fisher tfisher@math.byu.edu Department of Mathematics, Brigham Young University Summer School, Chengdu, China 2009 Dynamical systems The setting for a dynamical
Robustly transitive diffeomorphisms Todd Fisher tfisher@math.byu.edu Department of Mathematics, Brigham Young University Summer School, Chengdu, China 2009 Dynamical systems The setting for a dynamical
SPLITTING OF SEPARATRICES FOR (FAST) QUASIPERIODIC FORCING. splitting, which now seems to be the main cause of the stochastic behavior in
 QUASIPERIODIC FORCING. splitting, which now seems to be the main cause of the stochastic behavior in") SPLITTING OF SEPARATRICES FOR (FAST) QUASIPERIODIC FORCING A. DELSHAMS, V. GELFREICH, A. JORBA AND T.M. SEARA At the end of the last century, H. Poincare [7] discovered the phenomenon of separatrices splitting,
SPLITTING OF SEPARATRICES FOR (FAST) QUASIPERIODIC FORCING A. DELSHAMS, V. GELFREICH, A. JORBA AND T.M. SEARA At the end of the last century, H. Poincare [7] discovered the phenomenon of separatrices splitting,
Nonlinear Dynamics and Chaos
 Ian Eisenman eisenman@fas.harvard.edu Geological Museum 101, 6-6352 Nonlinear Dynamics and Chaos Review of some of the topics covered in homework problems, based on section notes. December, 2005 Contents
Ian Eisenman eisenman@fas.harvard.edu Geological Museum 101, 6-6352 Nonlinear Dynamics and Chaos Review of some of the topics covered in homework problems, based on section notes. December, 2005 Contents
11 Chaos in Continuous Dynamical Systems.
 11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
Lectures on Dynamical Systems. Anatoly Neishtadt
 Lectures on Dynamical Systems Anatoly Neishtadt Lectures for Mathematics Access Grid Instruction and Collaboration (MAGIC) consortium, Loughborough University, 2007 Part 3 LECTURE 14 NORMAL FORMS Resonances
Lectures on Dynamical Systems Anatoly Neishtadt Lectures for Mathematics Access Grid Instruction and Collaboration (MAGIC) consortium, Loughborough University, 2007 Part 3 LECTURE 14 NORMAL FORMS Resonances
Perturbation theory, KAM theory and Celestial Mechanics 7. KAM theory
 Perturbation theory, KAM theory and Celestial Mechanics 7. KAM theory Alessandra Celletti Department of Mathematics University of Roma Tor Vergata Sevilla, 25-27 January 2016 Outline 1. Introduction 2.
Perturbation theory, KAM theory and Celestial Mechanics 7. KAM theory Alessandra Celletti Department of Mathematics University of Roma Tor Vergata Sevilla, 25-27 January 2016 Outline 1. Introduction 2.
HYPERBOLIC DYNAMICAL SYSTEMS AND THE NONCOMMUTATIVE INTEGRATION THEORY OF CONNES ABSTRACT
 HYPERBOLIC DYNAMICAL SYSTEMS AND THE NONCOMMUTATIVE INTEGRATION THEORY OF CONNES Jan Segert ABSTRACT We examine hyperbolic differentiable dynamical systems in the context of Connes noncommutative integration
HYPERBOLIC DYNAMICAL SYSTEMS AND THE NONCOMMUTATIVE INTEGRATION THEORY OF CONNES Jan Segert ABSTRACT We examine hyperbolic differentiable dynamical systems in the context of Connes noncommutative integration
Oscillatory Motion. Simple pendulum: linear Hooke s Law restoring force for small angular deviations. Oscillatory solution
 Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic angular frequency
Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic angular frequency
Oscillatory Motion. Simple pendulum: linear Hooke s Law restoring force for small angular deviations. small angle approximation. Oscillatory solution
 Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ small angle approximation θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic
Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ small angle approximation θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic
Hamiltonian Dynamics In The Theory of Abstraction
 Hamiltonian Dynamics In The Theory of Abstraction Subhajit Ganguly. email: gangulysubhajit@indiatimes.com Abstract: This paper deals with fluid flow dynamics which may be Hamiltonian in nature and yet
Hamiltonian Dynamics In The Theory of Abstraction Subhajit Ganguly. email: gangulysubhajit@indiatimes.com Abstract: This paper deals with fluid flow dynamics which may be Hamiltonian in nature and yet
Lecture 5: Oscillatory motions for the RPE3BP
 Lecture 5: Oscillatory motions for the RPE3BP Marcel Guardia Universitat Politècnica de Catalunya February 10, 2017 M. Guardia (UPC) Lecture 5 February 10, 2017 1 / 25 Outline Oscillatory motions for the
Lecture 5: Oscillatory motions for the RPE3BP Marcel Guardia Universitat Politècnica de Catalunya February 10, 2017 M. Guardia (UPC) Lecture 5 February 10, 2017 1 / 25 Outline Oscillatory motions for the
One dimensional Maps
 Chapter 4 One dimensional Maps The ordinary differential equation studied in chapters 1-3 provide a close link to actual physical systems it is easy to believe these equations provide at least an approximate
Chapter 4 One dimensional Maps The ordinary differential equation studied in chapters 1-3 provide a close link to actual physical systems it is easy to believe these equations provide at least an approximate
LECTURE 8: DYNAMICAL SYSTEMS 7
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
Separatrix Map Analysis for Fractal Scatterings in Weak Interactions of Solitary Waves
 Separatrix Map Analysis for Fractal Scatterings in Weak Interactions of Solitary Waves By Yi Zhu, Richard Haberman, and Jianke Yang Previous studies have shown that fractal scatterings in weak interactions
Separatrix Map Analysis for Fractal Scatterings in Weak Interactions of Solitary Waves By Yi Zhu, Richard Haberman, and Jianke Yang Previous studies have shown that fractal scatterings in weak interactions
Introduction to Accelerator Physics Old Dominion University. Nonlinear Dynamics Examples in Accelerator Physics
 Introduction to Accelerator Physics Old Dominion University Nonlinear Dynamics Examples in Accelerator Physics Todd Satogata (Jefferson Lab) email satogata@jlab.org http://www.toddsatogata.net/2011-odu
Introduction to Accelerator Physics Old Dominion University Nonlinear Dynamics Examples in Accelerator Physics Todd Satogata (Jefferson Lab) email satogata@jlab.org http://www.toddsatogata.net/2011-odu
Linear and Nonlinear Oscillators (Lecture 2)
") Linear and Nonlinear Oscillators (Lecture 2) January 25, 2016 7/441 Lecture outline A simple model of a linear oscillator lies in the foundation of many physical phenomena in accelerator dynamics. A typical
Linear and Nonlinear Oscillators (Lecture 2) January 25, 2016 7/441 Lecture outline A simple model of a linear oscillator lies in the foundation of many physical phenomena in accelerator dynamics. A typical
Changing coordinates to adapt to a map of constant rank
 Introduction to Submanifolds Most manifolds of interest appear as submanifolds of others e.g. of R n. For instance S 2 is a submanifold of R 3. It can be obtained in two ways: 1 as the image of a map into
Introduction to Submanifolds Most manifolds of interest appear as submanifolds of others e.g. of R n. For instance S 2 is a submanifold of R 3. It can be obtained in two ways: 1 as the image of a map into
H. R. Dullin a) Department of Mathematical Sciences, Loughborough University, Loughborough LE11 3TU, United Kingdom
 Department of Mathematical Sciences, Loughborough University, Loughborough LE11 3TU, United Kingdom") CHAOS VOLUME 3, NUMBER MARCH 2003 REGULAR ARTICLES Twist singularities for symplectic maps H. R. Dullin a) Department of Mathematical Sciences, Loughborough University, Loughborough LE 3TU, United Kingdom
CHAOS VOLUME 3, NUMBER MARCH 2003 REGULAR ARTICLES Twist singularities for symplectic maps H. R. Dullin a) Department of Mathematical Sciences, Loughborough University, Loughborough LE 3TU, United Kingdom
Chapitre 4. Transition to chaos. 4.1 One-dimensional maps
 Chapitre 4 Transition to chaos In this chapter we will study how successive bifurcations can lead to chaos when a parameter is tuned. It is not an extensive review : there exists a lot of different manners
Chapitre 4 Transition to chaos In this chapter we will study how successive bifurcations can lead to chaos when a parameter is tuned. It is not an extensive review : there exists a lot of different manners
27. Topological classification of complex linear foliations
 27. Topological classification of complex linear foliations 545 H. Find the expression of the corresponding element [Γ ε ] H 1 (L ε, Z) through [Γ 1 ε], [Γ 2 ε], [δ ε ]. Problem 26.24. Prove that for any
27. Topological classification of complex linear foliations 545 H. Find the expression of the corresponding element [Γ ε ] H 1 (L ε, Z) through [Γ 1 ε], [Γ 2 ε], [δ ε ]. Problem 26.24. Prove that for any
Mechanisms of Chaos: Stable Instability
 Mechanisms of Chaos: Stable Instability Reading for this lecture: NDAC, Sec. 2.-2.3, 9.3, and.5. Unpredictability: Orbit complicated: difficult to follow Repeatedly convergent and divergent Net amplification
Mechanisms of Chaos: Stable Instability Reading for this lecture: NDAC, Sec. 2.-2.3, 9.3, and.5. Unpredictability: Orbit complicated: difficult to follow Repeatedly convergent and divergent Net amplification
Introduction to Dynamical Systems Basic Concepts of Dynamics
 Introduction to Dynamical Systems Basic Concepts of Dynamics A dynamical system: Has a notion of state, which contains all the information upon which the dynamical system acts. A simple set of deterministic
Introduction to Dynamical Systems Basic Concepts of Dynamics A dynamical system: Has a notion of state, which contains all the information upon which the dynamical system acts. A simple set of deterministic
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: April 06, 2018, at 14 00 18 00 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: April 06, 2018, at 14 00 18 00 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
HÉNON HEILES HAMILTONIAN CHAOS IN 2 D
 ABSTRACT HÉNON HEILES HAMILTONIAN CHAOS IN D MODELING CHAOS & COMPLEXITY 008 YOUVAL DAR PHYSICS DAR@PHYSICS.UCDAVIS.EDU Chaos in two degrees of freedom, demonstrated b using the Hénon Heiles Hamiltonian
ABSTRACT HÉNON HEILES HAMILTONIAN CHAOS IN D MODELING CHAOS & COMPLEXITY 008 YOUVAL DAR PHYSICS DAR@PHYSICS.UCDAVIS.EDU Chaos in two degrees of freedom, demonstrated b using the Hénon Heiles Hamiltonian
Chapter 4. Transition towards chaos. 4.1 One-dimensional maps
 Chapter 4 Transition towards chaos In this chapter we will study how successive bifurcations can lead to chaos when a parameter is tuned. It is not an extensive review : there exists a lot of different
Chapter 4 Transition towards chaos In this chapter we will study how successive bifurcations can lead to chaos when a parameter is tuned. It is not an extensive review : there exists a lot of different
TWO DIMENSIONAL FLOWS. Lecture 5: Limit Cycles and Bifurcations
 TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
Quasipatterns in surface wave experiments
 Quasipatterns in surface wave experiments Alastair Rucklidge Department of Applied Mathematics University of Leeds, Leeds LS2 9JT, UK With support from EPSRC A.M. Rucklidge and W.J. Rucklidge, Convergence
Quasipatterns in surface wave experiments Alastair Rucklidge Department of Applied Mathematics University of Leeds, Leeds LS2 9JT, UK With support from EPSRC A.M. Rucklidge and W.J. Rucklidge, Convergence
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
Multiperiodic dynamics overview and some recent results
 Multiperiodic dynamics overview and some recent results Henk Broer Rijksuniversiteit Groningen Instituut voor Wiskunde en Informatica POBox 800 9700 AV Groningen email: broer@math.rug.nl URL: http://www.math.rug.nl/~broer
Multiperiodic dynamics overview and some recent results Henk Broer Rijksuniversiteit Groningen Instituut voor Wiskunde en Informatica POBox 800 9700 AV Groningen email: broer@math.rug.nl URL: http://www.math.rug.nl/~broer
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
The phenomenon: complex motion, unusual geometry
 Part I The phenomenon: complex motion, unusual geometry Chapter 1 Chaotic motion 1.1 What is chaos? Certain long-lasting, sustained motion repeats itself exactly, periodically. Examples from everyday life
Part I The phenomenon: complex motion, unusual geometry Chapter 1 Chaotic motion 1.1 What is chaos? Certain long-lasting, sustained motion repeats itself exactly, periodically. Examples from everyday life
Internal transport barriers in some Hamiltonian systems modeling the magnetic lines dynamics in tokamak
 Journal of Physics: Conference Series Internal transport barriers in some Hamiltonian systems modeling the magnetic lines dynamics in tokamak To cite this article: D Constantinescu et al 2005 J. Phys.:
Journal of Physics: Conference Series Internal transport barriers in some Hamiltonian systems modeling the magnetic lines dynamics in tokamak To cite this article: D Constantinescu et al 2005 J. Phys.:
Global theory of one-frequency Schrödinger operators
 of one-frequency Schrödinger operators CNRS and IMPA August 21, 2012 Regularity and chaos In the study of classical dynamical systems, the main goal is the understanding of the long time behavior of observable
of one-frequency Schrödinger operators CNRS and IMPA August 21, 2012 Regularity and chaos In the study of classical dynamical systems, the main goal is the understanding of the long time behavior of observable
INVARIANT TORI IN THE LUNAR PROBLEM. Kenneth R. Meyer, Jesús F. Palacián, and Patricia Yanguas. Dedicated to Jaume Llibre on his 60th birthday
 Publ. Mat. (2014), 353 394 Proceedings of New Trends in Dynamical Systems. Salou, 2012. DOI: 10.5565/PUBLMAT Extra14 19 INVARIANT TORI IN THE LUNAR PROBLEM Kenneth R. Meyer, Jesús F. Palacián, and Patricia
Publ. Mat. (2014), 353 394 Proceedings of New Trends in Dynamical Systems. Salou, 2012. DOI: 10.5565/PUBLMAT Extra14 19 INVARIANT TORI IN THE LUNAR PROBLEM Kenneth R. Meyer, Jesús F. Palacián, and Patricia
Theory of Adiabatic Invariants A SOCRATES Lecture Course at the Physics Department, University of Marburg, Germany, February 2004
 Preprint CAMTP/03-8 August 2003 Theory of Adiabatic Invariants A SOCRATES Lecture Course at the Physics Department, University of Marburg, Germany, February 2004 Marko Robnik CAMTP - Center for Applied
Preprint CAMTP/03-8 August 2003 Theory of Adiabatic Invariants A SOCRATES Lecture Course at the Physics Department, University of Marburg, Germany, February 2004 Marko Robnik CAMTP - Center for Applied
1 The pendulum equation
 Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Vector Field Topology. Ronald Peikert SciVis Vector Field Topology 8-1
 Vector Field Topology Ronald Peikert SciVis 2007 - Vector Field Topology 8-1 Vector fields as ODEs What are conditions for existence and uniqueness of streamlines? For the initial value problem i x ( t)
Vector Field Topology Ronald Peikert SciVis 2007 - Vector Field Topology 8-1 Vector fields as ODEs What are conditions for existence and uniqueness of streamlines? For the initial value problem i x ( t)
Hamiltonian Chaos. Niraj Srivastava, Charles Kaufman, and Gerhard Müller. Department of Physics, University of Rhode Island, Kingston, RI
 Hamiltonian Chaos Niraj Srivastava, Charles Kaufman, and Gerhard Müller Department of Physics, University of Rhode Island, Kingston, RI 02881-0817. Cartesian coordinates, generalized coordinates, canonical
Hamiltonian Chaos Niraj Srivastava, Charles Kaufman, and Gerhard Müller Department of Physics, University of Rhode Island, Kingston, RI 02881-0817. Cartesian coordinates, generalized coordinates, canonical
Extracting Qualitative Dynamics from Numerical Experiments 1. Extended Abstract
 Extracting Qualitative Dynamics from Numerical Experiments 1 KENNETH MAN-KAM YIP MIT Artificial Intelligence Laboratory iwf -to - 438 545 Technology Square, Cambridge, MA 02139. yip@ oz. ai. mit. edu February
Extracting Qualitative Dynamics from Numerical Experiments 1 KENNETH MAN-KAM YIP MIT Artificial Intelligence Laboratory iwf -to - 438 545 Technology Square, Cambridge, MA 02139. yip@ oz. ai. mit. edu February
Siegel disk for complexified Hénon map
 Siegel disk for complexified Hénon map O.B. Isaeva, S.P. Kuznetsov arxiv:0804.4238v1 [nlin.cd] 26 Apr 2008 Institute of Radio-Engineering and Electronics of RAS, Saratov Branch, Zelenaya 38, Saratov, 410019,
Siegel disk for complexified Hénon map O.B. Isaeva, S.P. Kuznetsov arxiv:0804.4238v1 [nlin.cd] 26 Apr 2008 Institute of Radio-Engineering and Electronics of RAS, Saratov Branch, Zelenaya 38, Saratov, 410019,
arxiv: v2 [gr-qc] 8 Nov 2017
![arxiv: v2 [gr-qc] 8 Nov 2017](/thumbs/84/90996708.jpg "arxiv: v2 [gr-qc] 8 Nov 2017") Proceedings of RAGtime?/?,??/?? September,????/????, Opava, Czech Republic 1 S. Hledík and Z. Stuchlík, editors, Silesian University in Opava,????, pp. 1 8 arxiv:1711.02442v2 [gr-qc] 8 Nov 2017 Chaotic
Proceedings of RAGtime?/?,??/?? September,????/????, Opava, Czech Republic 1 S. Hledík and Z. Stuchlík, editors, Silesian University in Opava,????, pp. 1 8 arxiv:1711.02442v2 [gr-qc] 8 Nov 2017 Chaotic
Hamiltonian chaos and dark matter
 Hamiltonian chaos and dark matter Martin D. Weinberg UMass Astronomy weinberg@astro.umass.edu July 15, 2013 Monterey 07/15/13 slide 1 Goals Goals Bars Post-modern dynamics galactic dynamics Progress report
Hamiltonian chaos and dark matter Martin D. Weinberg UMass Astronomy weinberg@astro.umass.edu July 15, 2013 Monterey 07/15/13 slide 1 Goals Goals Bars Post-modern dynamics galactic dynamics Progress report
The Homoclinic Tangle and Smale s Horseshoe Map
 The Homoclinic Tangle and Smale s Horseshoe Map Matt I. Introduction The homoclinic tangle is an interesting property of the manifolds of certain maps. In order to give more formal meaning to some intuitive
The Homoclinic Tangle and Smale s Horseshoe Map Matt I. Introduction The homoclinic tangle is an interesting property of the manifolds of certain maps. In order to give more formal meaning to some intuitive
Meanders and Reconnection-Collision Sequences in the Standard Nontwist Map
 Meanders and Reconnection-Collision Sequences in the Standard Nontwist Map A. Wurm, A. Apte, K. Fuchss, and P.J. Morrison Department of Physics and Institute for Fusion Studies The University of Texas
Meanders and Reconnection-Collision Sequences in the Standard Nontwist Map A. Wurm, A. Apte, K. Fuchss, and P.J. Morrison Department of Physics and Institute for Fusion Studies The University of Texas
6.2 Brief review of fundamental concepts about chaotic systems
 6.2 Brief review of fundamental concepts about chaotic systems Lorenz (1963) introduced a 3-variable model that is a prototypical example of chaos theory. These equations were derived as a simplification
6.2 Brief review of fundamental concepts about chaotic systems Lorenz (1963) introduced a 3-variable model that is a prototypical example of chaos theory. These equations were derived as a simplification
Quantum Invariants: Topographical Map of Quantized Actions
 University of Rhode Island DigitalCommons@URI Physics Faculty Publications Physics 1990 Quantum Invariants: Topographical Map of Quantized Actions Niraj Srivastava University of Rhode Island Gerhard Müller
University of Rhode Island DigitalCommons@URI Physics Faculty Publications Physics 1990 Quantum Invariants: Topographical Map of Quantized Actions Niraj Srivastava University of Rhode Island Gerhard Müller
Physics Letters A. Conservative generalized bifurcation diagrams. Cesar Manchein a,marcusw.beims b, article info abstract
 Physics Letters A 377 (2013) 789 793 Contents lists available at SciVerse ScienceDirect Physics Letters A www.elsevier.com/locate/pla Conservative generalized bifurcation diagrams Cesar Manchein a,marcusw.beims
Physics Letters A 377 (2013) 789 793 Contents lists available at SciVerse ScienceDirect Physics Letters A www.elsevier.com/locate/pla Conservative generalized bifurcation diagrams Cesar Manchein a,marcusw.beims
The role of stochastization in fast MHD phenomena on ASDEX Upgrade
 1 EX/P9-10 The role of stochastization in fast MHD phenomena on ASDEX Upgrade V. Igochine 1), O.Dumbrajs 2,3), H. Zohm 1), G. Papp 4), G. Por 4), G. Pokol 4), ASDEX Upgrade team 1) 1) MPI für Plasmaphysik,
1 EX/P9-10 The role of stochastization in fast MHD phenomena on ASDEX Upgrade V. Igochine 1), O.Dumbrajs 2,3), H. Zohm 1), G. Papp 4), G. Por 4), G. Pokol 4), ASDEX Upgrade team 1) 1) MPI für Plasmaphysik,
Particle Dynamics in Time-Dependent Stadium-Like Billiards
 Journal of Statistical Physics, Vol. 108, Nos. 5/6, September 2002 ( 2002) Particle Dynamics in Time-Dependent Stadium-Like Billiards Alexander Loskutov 1 and Alexei Ryabov 1 Received November 7, 2001;
Journal of Statistical Physics, Vol. 108, Nos. 5/6, September 2002 ( 2002) Particle Dynamics in Time-Dependent Stadium-Like Billiards Alexander Loskutov 1 and Alexei Ryabov 1 Received November 7, 2001;
Hamiltonian Lecture notes Part 3
 Hamiltonian Lecture notes Part 3 Alice Quillen March 1, 017 Contents 1 What is a resonance? 1 1.1 Dangers of low order approximations...................... 1. A resonance is a commensurability.......................
Hamiltonian Lecture notes Part 3 Alice Quillen March 1, 017 Contents 1 What is a resonance? 1 1.1 Dangers of low order approximations...................... 1. A resonance is a commensurability.......................
Nonlinear Dynamics. Moreno Marzolla Dip. di Informatica Scienza e Ingegneria (DISI) Università di Bologna.
 Università di Bologna.") Nonlinear Dynamics Moreno Marzolla Dip. di Informatica Scienza e Ingegneria (DISI) Università di Bologna http://www.moreno.marzolla.name/ 2 Introduction: Dynamics of Simple Maps 3 Dynamical systems A dynamical
Nonlinear Dynamics Moreno Marzolla Dip. di Informatica Scienza e Ingegneria (DISI) Università di Bologna http://www.moreno.marzolla.name/ 2 Introduction: Dynamics of Simple Maps 3 Dynamical systems A dynamical
H(p 1,...p N,q 1,...q N ) ẋ = f(x) (2) volume. dv = dt volume
 ẋ = f(x) (2) volume. dv = dt volume") Dynamique Non-Linéaire L. Tuckerman Hamiltonian Systems 1 Hamiltonian systems A Hamiltonian system is described by q i = H p i H(p 1,...p N,q 1,...q N ) ṗ i = H q i (1) where the q i are considered to
Dynamique Non-Linéaire L. Tuckerman Hamiltonian Systems 1 Hamiltonian systems A Hamiltonian system is described by q i = H p i H(p 1,...p N,q 1,...q N ) ṗ i = H q i (1) where the q i are considered to
Nonlinear Autonomous Systems of Differential
 Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
The Breakdown of KAM Trajectories
 The Breakdown of KAM Trajectories D. BENSIMONO ~t L. P. KADANOFF~ OAT& T Bell Laboraiories Murray Hill,New Jersey 07974 bthe James Franck Insrirure Chicago, Illinois 60637 INTRODUCl'ION Hamiltonian systems
The Breakdown of KAM Trajectories D. BENSIMONO ~t L. P. KADANOFF~ OAT& T Bell Laboraiories Murray Hill,New Jersey 07974 bthe James Franck Insrirure Chicago, Illinois 60637 INTRODUCl'ION Hamiltonian systems
2 Discrete growth models, logistic map (Murray, Chapter 2)
") 2 Discrete growth models, logistic map (Murray, Chapter 2) As argued in Lecture 1 the population of non-overlapping generations can be modelled as a discrete dynamical system. This is an example of an
2 Discrete growth models, logistic map (Murray, Chapter 2) As argued in Lecture 1 the population of non-overlapping generations can be modelled as a discrete dynamical system. This is an example of an
Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients. Takayuki Yamaguchi
 Hokkaido Mathematical Journal Vol. 44 (2015) p. 277 312 Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients Takayuki Yamaguchi (Received March 13,
Hokkaido Mathematical Journal Vol. 44 (2015) p. 277 312 Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients Takayuki Yamaguchi (Received March 13,