How is balance of a forecast ensemble affected by adaptive and non-adaptive localization schemes?
|
|
|
- Lesley Gordon
- 6 years ago
- Views:
Transcription


1 1 How is balance of a forecast ensemble affected by adaptive and non-adaptive localization schemes? Ross Bannister Stefano Migliorini, Laura Baker, Ali Rudd NCEO, DIAMET, ESA University of Reading
2 2 Outline 1. Meteorological balance. (a) What and why? (b) How can assimilation lead to imbalance? (c) How to respect balance in data assimilation? (d) How much balance? 2. Ensemble data assimilation. (a) Sampling error. (b) Localization. (c) Balance (non-)preservation. (d) Possible mitigation strategies. 3. Balance diagnostics. 4. Adaptive and non-adaptive localization. (a) Spectral representation for static localization. (b) Static scheme 1 (S1). (c) Static scheme 2 (S2). (d) SENCORP adaptive localization. (e) ECO-RAP adaptive localization 1 (E1). (f) ECO-RAP adaptive localization 2 (E2). 5. Implied structure functions and balance diagnostics. 6. Conclusions. (a) Given an ensemble, what is the balance? (b) Localized diagnostics. (c) The meteorological case.
3 3 1 Meteorological balance 1(a) What is balance and why is it important to worry about? Initial conditions of meteorological models need to be appropriately balanced. Momentum equations Du Dt Dv Dt Dw Dt = fv 1 p ρ x D x, = fu 1 p ρ y D y, = 1 p ρ z g D x, f = 2Ω sin(y/a), Ω = rads 1, a = m, g = 9.806ms 1. Geostrophic balance fv 1 p ρ x = 0. Dimensionless variables u = Uũ, v = Uṽ, w = W w, p = P p, x = L x, z = H z, t = L/U t, Ro Dũ D t Ro Dṽ D t Ro W D w U D t = v P p fρul x D x, = ũ P p fρul ỹ D y, = P p fρuh z g fu D x, Ro = U fl = O(10 1 ), W U = O(10 2 ). Hydrostatic balance 1 p ρ z g = 0.
4 4 Geostrophic balance fv 1 p ρ x = 0. Geostrophic balance is characteristic of mid-latitude flow (small Ro wind follows the isobars). Hydrostatic balance 1 p ρ z g = 0. Some ageostrophic flow is needed in initial conditions to match the atmosphere. Too much ageostrophic flow can damage a forecast. Unbalanced motion relaxes to near balanced motion by geostrophic adjustment (gravity waves). All modern meteorological models are capable of supporting gravity waves so excessive gravity waves will cause a problem. Hydrostatic balance is characteristic of non-convective flow (small Ro and W/U). Meteorological models that permit convection explicitly must allow non-hydrostatic flow.
5 5 1(b) How can assimilation of observations lead to imbalance? Observations sample from the truth. The true manifold the model manifold. Observations are not perfect. Essentially discovered by L.F. Richardson in the 1920s.
 1 [ y Hx f ]. P f is used not just for regu")
6 6 1(c) How to respect balance in data assimilation? Initialization Post-posteriori filtering of imbalance according to a set of rules. Moves away from observations just assimilated. Forecast error covariance matrix x a = x f +P f H T ( R + HP f H T) 1 [ y Hx f ]. P f is used not just for regularization. P f contains the statistics of balance (e.g. for strong hydrostatic balance: in = x a x f (analysis increments), the correlation between [ p/ z] and [ρg] should be 1: p z + ρg = 0. P f in VAR is modelled using explicit balance conditions (called B). Example structure functions giving the output field (p, u or v down the side) associated with a point in the centre of the domain (either of p, u or v along the top). Red is positive, blue is negative.
7 7 1(d) How much balance should be in an analysis increment? Practically - we don t know. Have climatological ideas (e.g. winter average for mid-latitudes), but this could change from day-to-day (e.g. high-pressure vs. low pressure systems, fronts, convection, boundary layer characteristics, etc.) In the Kalman Filter this information will be wrapped-up in P f. In the Ensemble Kalman Filter this information is wrapped-up in the ensemble (see later). Want the analysis increments to be balanced in the way described by the Kalman update equation x a = x f + P f H T ( R + HP f H T) 1 [ y Hx f ].
 )] ij σ iσ j N 1 (1 ( ) ) 2 [P]ij. σ i σ j v-p correlation function from ensemble with N = 24.")
8 8 2 Ensemble data assimilation 2(a) Sampling error Dynamical sample covariance P D (N) = 1 N 1 N l=1 P D (N) Rn n δx l δx T l = 1 N 1 XXT, Dynamical forecast ensemble X = {δx 1, δx 2,... δx N }, δx l R n X R n N Sample covariance error [E(δP D (N) )] ij σ iσ j N 1 (1 ( ) ) 2 [P]ij. σ i σ j v-p correlation function from ensemble with N = 24.
9 9 2(b) Localization P L (N,K) = P D (N) Ω (K) P D (N) Rn n Ω (K) R n n Notation: P D (N) forecast error covariance matrix from N ensemble members (rank N). Ω (K) localization / regularization matrix (rank K). Ω (K) is a correlation matrix.
10 10 2(c) Balance (non-)preservation Balance is defined by the null-space (or near null space) of P f. Localization changes the null-space. Localization assumes that structures become less important with distance from an observation. Some structures grow with distance. Example - can affect position of peaks in geostrophic lobes. Localization changes the values and gradients of fields 1. 1 Lorenc A.C., The potential of the ensemble Kalman Filter for NWP - a comparison with 4D-VAR, Quart. J. Roy. Meteor. Soc. 129, (2003).
11 11 2(d) Possible mitigation strategies Avoid doing localization with highly anisotropic fields like u and v - apply to ψ and χ instead 2. OK for geostrophic balance, unclear what to do for other balances. Perform localization on control variables and introduce a balance operator. Like the Met Office s hybrid data assimilation system 3. OK when balances are known and appropriate. Adaptive localization schemes? SENCORP (Smoothed ENsemble COrrelations Raised to a Power) 4. ECO-RAP (Ensemble COrrelations Raised to A Power) Kepert J.S., Covariance localization and balance in an ensemble Kalman filter, Quart. J. Roy. Meteor. Soc. 135, , DOI: /qj.443 (2009). 3 Clayton A.M., Lorenc A.C. and Barker D.M., Operational implementation of a hybrid ensemble/4d-var global data assimilation system at the Met Office, Q.J.R. Meteorol. Soc., DOI: /qj.2054 (2012). 4 Bishop C.H. and Hodyss D., Flow adaptive moderation of spurious ensemble correlations and its used in ensemble-based data assimilation, Quart. J. Roy. Met. Soc. 133, (2007), DOI: /qj Bishop C.H. and Hodyss D., Ensemble covariances adaptively localized with ECO-RAP, Part 1: Tests on simple error models, Tellus A 61, (2009). 6 Bishop C.H. and Hodyss D., Ensemble covariances adaptively localized with ECO-RAP, Part 2: A strategy for the atmosphere, Tellus A 61, (2009).
12 12 3 Balance diagnostics 3(a) Given an ensemble, what is the balance? General: equation of motion and two-term balance equation Q(x) t = A(x) + B(x) + C(x), 0 = A(x) + B(x). A(x) will be exactly anti-correlated with B(x) if this balance condition is obeyed exactly. Geostrophic balance (actually linear balance): the divergence equation Dδ Dt = M + W + horiz. Coriolis + metric + forcing + other, M = c p ( θv0 2 zπ + 2 zπ 0 θ v), W = k ( u + ( f) u). Hydrostatic balance: the vertical momentum equation Dw Dt = P + T + vert. Coriolis + metric + forcing + other, P = θ v0 Π z, T = Π 0 z θ v.
13 13 3(b) What is the balance correlation in a localized ensemble? Dynamical sample cov P D (N) = 1 N 1 N l=1 δx l δx T l = 1 N 1 XXT P D (N) Rn n Dynamical forecast ensemble X = {δx 1, δx 2,... δx N } X R n N Localized sample cov P L (N,K) = P D (N) Ω (K)
14 14 3(b) What is the balance correlation in a localized ensemble? Dynamical sample cov P D (N) = 1 N 1 N l=1 δx l δx T l = 1 N 1 XXT P D (N) Rn n Dynamical forecast ensemble X = {δx 1, δx 2,... δx N } X R n N Localized sample cov P L (N,K) = P D (N) Ω (K) Correlation Ω (K) = 1 K 1 K k=1 ω k ω T k = 1 K 1 KKT Ω (K) R n n Correlation ensemble K = {ω 1, ω 2,... ω K } K R n K
15 15 3(b) What is the balance correlation in a localized ensemble? Dynamical sample cov P D (N) = 1 N 1 N l=1 δx l δx T l = 1 N 1 XXT P D (N) Rn n Dynamical forecast ensemble X = {δx 1, δx 2,... δx N } X R n N Localized sample cov P L (N,K) = P D (N) Ω (K) Correlation Ω (K) = 1 K 1 K k=1 ω k ω T k = 1 K 1 KKT Ω (K) R n n Correlation ensemble K = {ω 1, ω 2,... ω K } K R n K Localized sample cov revisited P L (N,K) = 1 M 1 M δ x m δ x T m = m=1 1 M 1 X X T (M = NK) Localized ensemble X = {δ x1, δ x 2,... δ x M } X R n M δ x m = δx l ω k M 1 X = (N 1)(K 1) X K

16 16 3(c) The meteorological case 20/09/2011 MOGREPS: Met Office Global and Regional Ensemble Precipitation System
17 17 4 Adaptive and non-adaptive localization 4(a) Spectral representation (univariate non-adaptive localization for variable s) K s = F s Λ 1/2 s [K s ] rk = cos(k x r x + δs x ) cos(k y r y + δs)ν(r y z, k z ) }{{} λ H s (kx 2 + ky)λ 2 V s (k z ) }{{} F s Over-bar means normalize - make sum of squares of each row of matrix unity. Choose the # horiz. wns, K x\y, and # vert. modes, K z : K = K x\y K z. Λ 1/2 s In practice K n The first four vertical modes mode 1 mode 2 mode 3 mode 4 1 Static moderation function (either in horizontal or vertical) alpha = 1 alpha = vertical level function mode value separation Figure 1: Left: First four vert. modes (ν(r z, k z )). Right: Moderation fns, λ H 2 s (rx\y ), λ V 2 s (rz ).
18 18 4(b) Static localization scheme 1 (S1) K S1 = F δu Λ 1/2 δu F δv Λ 1/2 δv F δw Λ 1/2 δw F δπ Λ 1/2 δπ F δθ Λ 1/2 δθ R n 5K 4(c) Static localization scheme 2 (S2) K S2 = F δu Λ 1/2 δu F δv Λ 1/2 δv F δw Λ 1/2 δw F δπ Λ 1/2 δπ F δθ Λ 1/2 δθ R n K
19 19 4(d) SENCORP (Smoothed ENsemble COrrelations Raised to a Power) localization Ω = C Q 1. From the ensemble members, δx l, create smoothed members, δw l. 2. Normalize. 3. Calculate correlation matrix C = 1 N 1 N δw l δwl T. l=1 4. C Q is the Schur power of C with itself Q times. K = {ω 1, ω 2,... ω K } = ω k = Q/2 Z and Q > 0 K 1 (N 1) QW W W K Rn K K 1 (N 1) Qδw l 1... δw lq K = N Q, but rank(c) < K
20 20 4(e) ECO-RAP (Ensemble COrrelations Raised to A Power) localization scheme 1 (E1) A combination of SENCORP and S1 F δu Λ 1/2 δu F δv Λ 1/2 K E1 δv = C Q 0 0 F δw Λ 1/2 δw F δπ Λ 1/2 δπ F δθ Λ 1/2 δθ R n 5K 4(f) ECO-RAP (Ensemble COrrelations Raised to A Power) localization scheme 2 (E2) A combination of SENCORP and S2 K E2 = C Q F δu Λ 1/2 δu F δv Λ 1/2 δv F δw Λ 1/2 δw F δπ Λ 1/2 δπ F δθ Λ 1/2 δθ R n K Practicality: expensive so have to restrict influence of C Q.
21 21 5 Implied structure functions and balance diagnostics (dynamic ensemble) (a) T-T (long/ht), (b) T-T (long/lat), (c) u-t (long/lat), (d) v-t long lat





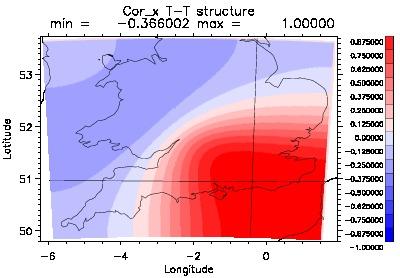

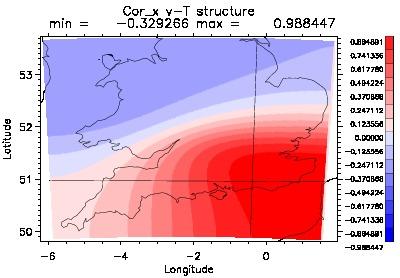
22 22 5 Implied structure functions and balance diagnostics (static localization, S2) (a) T-T (long/ht), (b) T-T (long/lat), (c) u-t (long/lat), (d) v-t long lat





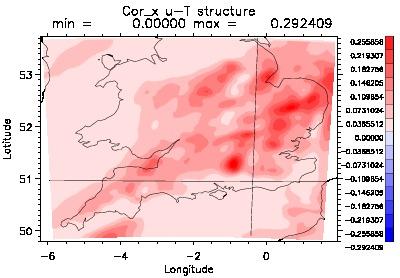

23 23 5 Implied structure functions and balance diagnostics (adaptive localization, SENCORP) (a) T-T (long/ht), (b) T-T (long/lat), (c) u-t (long/lat), (d) v-t long lat
24 24 5 Implied structure functions and balance diagnostics (adaptive localization, E2) (a) T-T (long/ht), (b) T-T (long/lat), (c) u-t (long/lat), (d) v-t long lat Fields not computed Fields not computed
25 25 5 Implied structure functions and balance diagnostics (dynamic ensemble) Geostrophic balance diagnostic Hydrostatic balance diagnostic 70 un-localized 70 un-localized model level (0 is surface) model level (0 is surface) (balanced), +1 (unbalanced) (balanced), +1 (unbalanced)
26 26 5 Implied structure functions and balance diagnostics (static localization, S2) Geostrophic balance diagnostic Hydrostatic balance diagnostic 70 un-localized S2 70 un-localized S model level (0 is surface) model level (0 is surface) (balanced), +1 (unbalanced) (balanced), +1 (unbalanced)
27 27 5 Implied structure functions and balance diagnostics (adaptive localization, SENCORP) Geostrophic balance diagnostic Hydrostatic balance diagnostic 70 un-localized SENCORP 70 un-localized SENCORP model level (0 is surface) model level (0 is surface) (balanced), +1 (unbalanced) (balanced), +1 (unbalanced)
28 28 5 Implied structure functions and balance diagnostics (adaptive localization, E2) Geostrophic balance diagnostic Hydrostatic balance diagnostic 70 un-localized E2 70 un-localized E model level (0 is surface) model level (0 is surface) (balanced), +1 (unbalanced) (balanced), +1 (unbalanced)
29 29 6 Conclusions Balanced analyses for NWP. Crude DA does not respect balance. Not imposing balance when it should be,..., and imposing balance when it shouldn t be. Adding localization to EnKF disturbs balance. Balance diagnostics. Given an ensemble, find the correlation between leading terms. Apply to dynamical (raw) ensemble. Apply to localized ensemble (combining of dynamical and correlation ensemble). Correlation ensemble is squareroot of localization matrix. Localization schemes. Static (spectral) scheme (S2). SENCORP scheme (localization defined from smoothed ensemble). ECORAP (combination of S2 and SENCORP) scheme (S2). Findings SENCORP doesn t perform well. S2 performs well for geos. balance. E2 performs will for hydro. balance. Notes Many parameters (truncation, length-scales, order Q, other things). Look at other profiles and cases. Is it worth the computational effort? Other balances (anelastic, moisture,...).
Comparisons between 4DEnVar and 4DVar on the Met Office global model
 Comparisons between 4DEnVar and 4DVar on the Met Office global model David Fairbairn University of Surrey/Met Office 26 th June 2013 Joint project by David Fairbairn, Stephen Pring, Andrew Lorenc, Neill
Comparisons between 4DEnVar and 4DVar on the Met Office global model David Fairbairn University of Surrey/Met Office 26 th June 2013 Joint project by David Fairbairn, Stephen Pring, Andrew Lorenc, Neill
Adaptive Localization: Proposals for a high-resolution multivariate system Ross Bannister, HRAA, December 2008, January 2009 Version 3.
 Adaptive Localization: Proposals for a high-resolution multivariate system Ross Bannister, HRAA, December 2008, January 2009 Version 3.. The implicit Schur product 2. The Bishop method for adaptive localization
Adaptive Localization: Proposals for a high-resolution multivariate system Ross Bannister, HRAA, December 2008, January 2009 Version 3.. The implicit Schur product 2. The Bishop method for adaptive localization
EnKF Localization Techniques and Balance
 EnKF Localization Techniques and Balance Steven Greybush Eugenia Kalnay, Kayo Ide, Takemasa Miyoshi, and Brian Hunt Weather Chaos Meeting September 21, 2009 Data Assimilation Equation Scalar form: x a
EnKF Localization Techniques and Balance Steven Greybush Eugenia Kalnay, Kayo Ide, Takemasa Miyoshi, and Brian Hunt Weather Chaos Meeting September 21, 2009 Data Assimilation Equation Scalar form: x a
Can hybrid-4denvar match hybrid-4dvar?
 Comparing ensemble-variational assimilation methods for NWP: Can hybrid-4denvar match hybrid-4dvar? WWOSC, Montreal, August 2014. Andrew Lorenc, Neill Bowler, Adam Clayton, David Fairbairn and Stephen
Comparing ensemble-variational assimilation methods for NWP: Can hybrid-4denvar match hybrid-4dvar? WWOSC, Montreal, August 2014. Andrew Lorenc, Neill Bowler, Adam Clayton, David Fairbairn and Stephen
Evolution of Forecast Error Covariances in 4D-Var and ETKF methods
 Evolution of Forecast Error Covariances in 4D-Var and ETKF methods Chiara Piccolo Met Office Exeter, United Kingdom chiara.piccolo@metoffice.gov.uk Introduction Estimates of forecast error covariances
Evolution of Forecast Error Covariances in 4D-Var and ETKF methods Chiara Piccolo Met Office Exeter, United Kingdom chiara.piccolo@metoffice.gov.uk Introduction Estimates of forecast error covariances
Met Office convective-scale 4DVAR system, tests and improvement
 Met Office convective-scale 4DVAR system, tests and improvement Marco Milan*, Marek Wlasak, Stefano Migliorini, Bruce Macpherson Acknowledgment: Inverarity Gordon, Gareth Dow, Mike Thurlow, Mike Cullen
Met Office convective-scale 4DVAR system, tests and improvement Marco Milan*, Marek Wlasak, Stefano Migliorini, Bruce Macpherson Acknowledgment: Inverarity Gordon, Gareth Dow, Mike Thurlow, Mike Cullen
Background Error Covariance Modelling
 Background Error Covariance Modelling Mike Fisher Slide 1 Outline Diagnosing the Statistics of Background Error using Ensembles of Analyses Modelling the Statistics in Spectral Space - Relaxing constraints
Background Error Covariance Modelling Mike Fisher Slide 1 Outline Diagnosing the Statistics of Background Error using Ensembles of Analyses Modelling the Statistics in Spectral Space - Relaxing constraints
Relative Merits of 4D-Var and Ensemble Kalman Filter
 Relative Merits of 4D-Var and Ensemble Kalman Filter Andrew Lorenc Met Office, Exeter International summer school on Atmospheric and Oceanic Sciences (ISSAOS) "Atmospheric Data Assimilation". August 29
Relative Merits of 4D-Var and Ensemble Kalman Filter Andrew Lorenc Met Office, Exeter International summer school on Atmospheric and Oceanic Sciences (ISSAOS) "Atmospheric Data Assimilation". August 29
Ensemble prediction for nowcasting with a convection permitting model II: forecast error statistics
 Ensemble prediction for nowcasting with a convection permitting model II: forecast error statistics Article Published Version Bannister, R. N., Migliorini, S. and Dixon, M. A. G. (2011) Ensemble prediction
Ensemble prediction for nowcasting with a convection permitting model II: forecast error statistics Article Published Version Bannister, R. N., Migliorini, S. and Dixon, M. A. G. (2011) Ensemble prediction
P 1.86 A COMPARISON OF THE HYBRID ENSEMBLE TRANSFORM KALMAN FILTER (ETKF)- 3DVAR AND THE PURE ENSEMBLE SQUARE ROOT FILTER (EnSRF) ANALYSIS SCHEMES
- 3DVAR AND THE PURE ENSEMBLE SQUARE ROOT FILTER (EnSRF) ANALYSIS SCHEMES") P 1.86 A COMPARISON OF THE HYBRID ENSEMBLE TRANSFORM KALMAN FILTER (ETKF)- 3DVAR AND THE PURE ENSEMBLE SQUARE ROOT FILTER (EnSRF) ANALYSIS SCHEMES Xuguang Wang*, Thomas M. Hamill, Jeffrey S. Whitaker NOAA/CIRES
P 1.86 A COMPARISON OF THE HYBRID ENSEMBLE TRANSFORM KALMAN FILTER (ETKF)- 3DVAR AND THE PURE ENSEMBLE SQUARE ROOT FILTER (EnSRF) ANALYSIS SCHEMES Xuguang Wang*, Thomas M. Hamill, Jeffrey S. Whitaker NOAA/CIRES
ρ x + fv f 'w + F x ρ y fu + F y Fundamental Equation in z coordinate p = ρrt or pα = RT Du uv tanφ Dv Dt + u2 tanφ + vw a a = 1 p Dw Dt u2 + v 2
 Fundamental Equation in z coordinate p = ρrt or pα = RT Du uv tanφ + uw Dt a a = 1 p ρ x + fv f 'w + F x Dv Dt + u2 tanφ + vw a a = 1 p ρ y fu + F y Dw Dt u2 + v 2 = 1 p a ρ z g + f 'u + F z Dρ Dt + ρ
Fundamental Equation in z coordinate p = ρrt or pα = RT Du uv tanφ + uw Dt a a = 1 p ρ x + fv f 'w + F x Dv Dt + u2 tanφ + vw a a = 1 p ρ y fu + F y Dw Dt u2 + v 2 = 1 p a ρ z g + f 'u + F z Dρ Dt + ρ
7 Balanced Motion. 7.1 Return of the...scale analysis for hydrostatic balance! CSU ATS601 Fall 2015
 7 Balanced Motion We previously discussed the concept of balance earlier, in the context of hydrostatic balance. Recall that the balanced condition means no accelerations (balance of forces). That is,
7 Balanced Motion We previously discussed the concept of balance earlier, in the context of hydrostatic balance. Recall that the balanced condition means no accelerations (balance of forces). That is,
4DEnVar. Four-Dimensional Ensemble-Variational Data Assimilation. Colloque National sur l'assimilation de données
 Four-Dimensional Ensemble-Variational Data Assimilation 4DEnVar Colloque National sur l'assimilation de données Andrew Lorenc, Toulouse France. 1-3 décembre 2014 Crown copyright Met Office 4DEnVar: Topics
Four-Dimensional Ensemble-Variational Data Assimilation 4DEnVar Colloque National sur l'assimilation de données Andrew Lorenc, Toulouse France. 1-3 décembre 2014 Crown copyright Met Office 4DEnVar: Topics
NWP Equations (Adapted from UCAR/COMET Online Modules)
") NWP Equations (Adapted from UCAR/COMET Online Modules) Certain physical laws of motion and conservation of energy (for example, Newton's Second Law of Motion and the First Law of Thermodynamics) govern
NWP Equations (Adapted from UCAR/COMET Online Modules) Certain physical laws of motion and conservation of energy (for example, Newton's Second Law of Motion and the First Law of Thermodynamics) govern
Representation of model error in a convective-scale ensemble
 Representation of model error in a convective-scale ensemble Ross Bannister^*, Stefano Migliorini^*, Laura Baker*, Ali Rudd* ^ National Centre for Earth Observation * DIAMET, Dept of Meteorology, University
Representation of model error in a convective-scale ensemble Ross Bannister^*, Stefano Migliorini^*, Laura Baker*, Ali Rudd* ^ National Centre for Earth Observation * DIAMET, Dept of Meteorology, University
4. DATA ASSIMILATION FUNDAMENTALS
 4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
ON DIAGNOSING OBSERVATION ERROR STATISTICS WITH LOCAL ENSEMBLE DATA ASSIMILATION
 ON DIAGNOSING OBSERVATION ERROR STATISTICS WITH LOCAL ENSEMBLE DATA ASSIMILATION J. A. Waller, S. L. Dance, N. K. Nichols University of Reading 1 INTRODUCTION INTRODUCTION Motivation Only % of observations
ON DIAGNOSING OBSERVATION ERROR STATISTICS WITH LOCAL ENSEMBLE DATA ASSIMILATION J. A. Waller, S. L. Dance, N. K. Nichols University of Reading 1 INTRODUCTION INTRODUCTION Motivation Only % of observations
Correlations of control variables in variational data assimilation
 Quarterly Journal of the Royal Meteorological Society Q. J. R. Meteorol. Soc. 37: 62 63, April 2 A Correlations of control variables in variational data assimilation D. Katz a,a.s.lawless* a,n.k.nichols
Quarterly Journal of the Royal Meteorological Society Q. J. R. Meteorol. Soc. 37: 62 63, April 2 A Correlations of control variables in variational data assimilation D. Katz a,a.s.lawless* a,n.k.nichols
A Regime-dependent balanced control variable based on potential vorticity
 A Regime-dependent balanced control variable based on potential vorticity Ross N. Bannister 1 and Mike J. P. Cullen 2 1 Data Assimilation Research Centre, Dept. of Meteorology, Univ. of Reading, Reading,
A Regime-dependent balanced control variable based on potential vorticity Ross N. Bannister 1 and Mike J. P. Cullen 2 1 Data Assimilation Research Centre, Dept. of Meteorology, Univ. of Reading, Reading,
Multivariate Correlations: Applying a Dynamic Constraint and Variable Localization in an Ensemble Context
 Multivariate Correlations: Applying a Dynamic Constraint and Variable Localization in an Ensemble Context Catherine Thomas 1,2,3, Kayo Ide 1 Additional thanks to Daryl Kleist, Eugenia Kalnay, Takemasa
Multivariate Correlations: Applying a Dynamic Constraint and Variable Localization in an Ensemble Context Catherine Thomas 1,2,3, Kayo Ide 1 Additional thanks to Daryl Kleist, Eugenia Kalnay, Takemasa
In the derivation of Optimal Interpolation, we found the optimal weight matrix W that minimizes the total analysis error variance.
 hree-dimensional variational assimilation (3D-Var) In the derivation of Optimal Interpolation, we found the optimal weight matrix W that minimizes the total analysis error variance. Lorenc (1986) showed
hree-dimensional variational assimilation (3D-Var) In the derivation of Optimal Interpolation, we found the optimal weight matrix W that minimizes the total analysis error variance. Lorenc (1986) showed
A regime-dependent balanced control variable based on potential vorticity
 A regime-dependent alanced control variale ased on potential vorticity Ross Bannister, Data Assimilation Research Centre, University of Reading Mike Cullen, Numerical Weather Prediction, Met Office Funding:
A regime-dependent alanced control variale ased on potential vorticity Ross Bannister, Data Assimilation Research Centre, University of Reading Mike Cullen, Numerical Weather Prediction, Met Office Funding:
Hybrid Variational Ensemble Data Assimilation for Tropical Cyclone
 Hybrid Variational Ensemble Data Assimilation for Tropical Cyclone Forecasts Xuguang Wang School of Meteorology University of Oklahoma, Norman, OK Acknowledgement: OU: Ting Lei, Yongzuo Li, Kefeng Zhu,
Hybrid Variational Ensemble Data Assimilation for Tropical Cyclone Forecasts Xuguang Wang School of Meteorology University of Oklahoma, Norman, OK Acknowledgement: OU: Ting Lei, Yongzuo Li, Kefeng Zhu,
Variational data assimilation
 Background and methods NCEO, Dept. of Meteorology, Univ. of Reading 710 March 2018, Univ. of Reading Bayes' Theorem Bayes' Theorem p(x y) = posterior distribution = p(x) p(y x) p(y) prior distribution
Background and methods NCEO, Dept. of Meteorology, Univ. of Reading 710 March 2018, Univ. of Reading Bayes' Theorem Bayes' Theorem p(x y) = posterior distribution = p(x) p(y x) p(y) prior distribution
Review of Covariance Localization in Ensemble Filters
 NOAA Earth System Research Laboratory Review of Covariance Localization in Ensemble Filters Tom Hamill NOAA Earth System Research Lab, Boulder, CO tom.hamill@noaa.gov Canonical ensemble Kalman filter update
NOAA Earth System Research Laboratory Review of Covariance Localization in Ensemble Filters Tom Hamill NOAA Earth System Research Lab, Boulder, CO tom.hamill@noaa.gov Canonical ensemble Kalman filter update
Goal: Use understanding of physically-relevant scales to reduce the complexity of the governing equations
 Scale analysis relevant to the tropics [large-scale synoptic systems]* Goal: Use understanding of physically-relevant scales to reduce the complexity of the governing equations *Reminder: Midlatitude scale
Scale analysis relevant to the tropics [large-scale synoptic systems]* Goal: Use understanding of physically-relevant scales to reduce the complexity of the governing equations *Reminder: Midlatitude scale
Ensemble 4DVAR for the NCEP hybrid GSI EnKF data assimilation system and observation impact study with the hybrid system
 Ensemble 4DVAR for the NCEP hybrid GSI EnKF data assimilation system and observation impact study with the hybrid system Xuguang Wang School of Meteorology University of Oklahoma, Norman, OK OU: Ting Lei,
Ensemble 4DVAR for the NCEP hybrid GSI EnKF data assimilation system and observation impact study with the hybrid system Xuguang Wang School of Meteorology University of Oklahoma, Norman, OK OU: Ting Lei,
Quarterly Journal of the Royal Meteorological Society
 Quarterly Journal of the Royal Meteorological Society Effects of sequential or simultaneous assimilation of observations and localization methods on the performance of the ensemble Kalman filter Journal:
Quarterly Journal of the Royal Meteorological Society Effects of sequential or simultaneous assimilation of observations and localization methods on the performance of the ensemble Kalman filter Journal:
Background and observation error covariances Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience
 Background and observation error covariances Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience Sarah Dance School of Mathematical and Physical Sciences, University of Reading
Background and observation error covariances Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience Sarah Dance School of Mathematical and Physical Sciences, University of Reading
Optimal Localization for Ensemble Kalman Filter Systems
 Journal December of the 2014 Meteorological Society of Japan, Vol. Á. 92, PERIÁÑEZ No. 6, pp. et 585 597, al. 2014 585 DOI:10.2151/jmsj.2014-605 Optimal Localization for Ensemble Kalman Filter Systems
Journal December of the 2014 Meteorological Society of Japan, Vol. Á. 92, PERIÁÑEZ No. 6, pp. et 585 597, al. 2014 585 DOI:10.2151/jmsj.2014-605 Optimal Localization for Ensemble Kalman Filter Systems
A new Hierarchical Bayes approach to ensemble-variational data assimilation
 A new Hierarchical Bayes approach to ensemble-variational data assimilation Michael Tsyrulnikov and Alexander Rakitko HydroMetCenter of Russia College Park, 20 Oct 2014 Michael Tsyrulnikov and Alexander
A new Hierarchical Bayes approach to ensemble-variational data assimilation Michael Tsyrulnikov and Alexander Rakitko HydroMetCenter of Russia College Park, 20 Oct 2014 Michael Tsyrulnikov and Alexander
The Shallow Water Equations
 If you have not already done so, you are strongly encouraged to read the companion file on the non-divergent barotropic vorticity equation, before proceeding to this shallow water case. We do not repeat
If you have not already done so, you are strongly encouraged to read the companion file on the non-divergent barotropic vorticity equation, before proceeding to this shallow water case. We do not repeat
Fundamentals of Data Assimilation
 National Center for Atmospheric Research, Boulder, CO USA GSI Data Assimilation Tutorial - June 28-30, 2010 Acknowledgments and References WRFDA Overview (WRF Tutorial Lectures, H. Huang and D. Barker)
National Center for Atmospheric Research, Boulder, CO USA GSI Data Assimilation Tutorial - June 28-30, 2010 Acknowledgments and References WRFDA Overview (WRF Tutorial Lectures, H. Huang and D. Barker)
The ECMWF Hybrid 4D-Var and Ensemble of Data Assimilations
 The Hybrid 4D-Var and Ensemble of Data Assimilations Lars Isaksen, Massimo Bonavita and Elias Holm Data Assimilation Section lars.isaksen@ecmwf.int Acknowledgements to: Mike Fisher and Marta Janiskova
The Hybrid 4D-Var and Ensemble of Data Assimilations Lars Isaksen, Massimo Bonavita and Elias Holm Data Assimilation Section lars.isaksen@ecmwf.int Acknowledgements to: Mike Fisher and Marta Janiskova
Kalman Filter and Ensemble Kalman Filter
 Kalman Filter and Ensemble Kalman Filter 1 Motivation Ensemble forecasting : Provides flow-dependent estimate of uncertainty of the forecast. Data assimilation : requires information about uncertainty
Kalman Filter and Ensemble Kalman Filter 1 Motivation Ensemble forecasting : Provides flow-dependent estimate of uncertainty of the forecast. Data assimilation : requires information about uncertainty
2.5 Shallow water equations, quasigeostrophic filtering, and filtering of inertia-gravity waves
 Chapter. The continuous equations φ=gh Φ=gH φ s =gh s Fig..5: Schematic of the shallow water model, a hydrostatic, incompressible fluid with a rigid bottom h s (x,y), a free surface h(x,y,t), and horizontal
Chapter. The continuous equations φ=gh Φ=gH φ s =gh s Fig..5: Schematic of the shallow water model, a hydrostatic, incompressible fluid with a rigid bottom h s (x,y), a free surface h(x,y,t), and horizontal
M.Sc. in Meteorology. Numerical Weather Prediction Prof Peter Lynch
 M.Sc. in Meteorology UCD Numerical Weather Prediction Prof Peter Lynch Meteorology & Climate Centre School of Mathematical Sciences University College Dublin Second Semester, 2005 2006. In this section
M.Sc. in Meteorology UCD Numerical Weather Prediction Prof Peter Lynch Meteorology & Climate Centre School of Mathematical Sciences University College Dublin Second Semester, 2005 2006. In this section
Numerical Weather prediction at the European Centre for Medium-Range Weather Forecasts (2)
") Numerical Weather prediction at the European Centre for Medium-Range Weather Forecasts (2) Time series curves 500hPa geopotential Correlation coefficent of forecast anomaly N Hemisphere Lat 20.0 to 90.0
Numerical Weather prediction at the European Centre for Medium-Range Weather Forecasts (2) Time series curves 500hPa geopotential Correlation coefficent of forecast anomaly N Hemisphere Lat 20.0 to 90.0
Improving GFS 4DEnVar Hybrid Data Assimilation System Using Time-lagged Ensembles
 Improving GFS 4DEnVar Hybrid Data Assimilation System Using Time-lagged Ensembles Bo Huang and Xuguang Wang School of Meteorology University of Oklahoma, Norman, OK, USA Acknowledgement: Junkyung Kay (OU);
Improving GFS 4DEnVar Hybrid Data Assimilation System Using Time-lagged Ensembles Bo Huang and Xuguang Wang School of Meteorology University of Oklahoma, Norman, OK, USA Acknowledgement: Junkyung Kay (OU);
The hybrid ETKF- Variational data assimilation scheme in HIRLAM
 The hybrid ETKF- Variational data assimilation scheme in HIRLAM (current status, problems and further developments) The Hungarian Meteorological Service, Budapest, 24.01.2011 Nils Gustafsson, Jelena Bojarova
The hybrid ETKF- Variational data assimilation scheme in HIRLAM (current status, problems and further developments) The Hungarian Meteorological Service, Budapest, 24.01.2011 Nils Gustafsson, Jelena Bojarova
Introduction to initialization of NWP models
 Introduction to initialization of NWP models weather forecasting an initial value problem traditionally, initialization comprised objective analysis of obs at a fixed synoptic time, i.e. 00Z or 12Z: data
Introduction to initialization of NWP models weather forecasting an initial value problem traditionally, initialization comprised objective analysis of obs at a fixed synoptic time, i.e. 00Z or 12Z: data
R. E. Petrie and R. N. Bannister. Department of Meteorology, Earley Gate, University of Reading, Reading, RG6 6BB, United Kingdom
 A method for merging flow-dependent forecast error statistics from an ensemble with static statistics for use in high resolution variational data assimilation R. E. Petrie and R. N. Bannister Department
A method for merging flow-dependent forecast error statistics from an ensemble with static statistics for use in high resolution variational data assimilation R. E. Petrie and R. N. Bannister Department
EFSO and DFS diagnostics for JMA s global Data Assimilation System: their caveats and potential pitfalls
 EFSO and DFS diagnostics for JMA s global Data Assimilation System: their caveats and potential pitfalls Daisuke Hotta 1,2 and Yoichiro Ota 2 1 Meteorological Research Institute, Japan Meteorological Agency
EFSO and DFS diagnostics for JMA s global Data Assimilation System: their caveats and potential pitfalls Daisuke Hotta 1,2 and Yoichiro Ota 2 1 Meteorological Research Institute, Japan Meteorological Agency
Operational implementation of a hybrid ensemble/4d-var global data assimilation system at the Met Office
 Quarterly Journal of the Royal Meteorological Society Q. J. R. Meteorol. Soc. 139: 1445 1461, July 2013 B Operational implementation of a hybrid ensemble/4d-var global data assimilation system at the Met
Quarterly Journal of the Royal Meteorological Society Q. J. R. Meteorol. Soc. 139: 1445 1461, July 2013 B Operational implementation of a hybrid ensemble/4d-var global data assimilation system at the Met
Chapter 2. The continuous equations
 Chapter. The continuous equations Fig. 1.: Schematic of a forecast with slowly varying weather-related variations and superimposed high frequency Lamb waves. Note that even though the forecast of the slow
Chapter. The continuous equations Fig. 1.: Schematic of a forecast with slowly varying weather-related variations and superimposed high frequency Lamb waves. Note that even though the forecast of the slow
Representation of inhomogeneous, non-separable covariances by sparse wavelet-transformed matrices
 Representation of inhomogeneous, non-separable covariances by sparse wavelet-transformed matrices Andreas Rhodin, Harald Anlauf German Weather Service (DWD) Workshop on Flow-dependent aspects of data assimilation,
Representation of inhomogeneous, non-separable covariances by sparse wavelet-transformed matrices Andreas Rhodin, Harald Anlauf German Weather Service (DWD) Workshop on Flow-dependent aspects of data assimilation,
How 4DVAR can benefit from or contribute to EnKF (a 4DVAR perspective)
") How 4DVAR can benefit from or contribute to EnKF (a 4DVAR perspective) Dale Barker WWRP/THORPEX Workshop on 4D-Var and Ensemble Kalman Filter Intercomparisons Sociedad Cientifica Argentina, Buenos Aires,
How 4DVAR can benefit from or contribute to EnKF (a 4DVAR perspective) Dale Barker WWRP/THORPEX Workshop on 4D-Var and Ensemble Kalman Filter Intercomparisons Sociedad Cientifica Argentina, Buenos Aires,
Four-Dimensional Ensemble Kalman Filtering
 Four-Dimensional Ensemble Kalman Filtering B.R. Hunt, E. Kalnay, E.J. Kostelich, E. Ott, D.J. Patil, T. Sauer, I. Szunyogh, J.A. Yorke, A.V. Zimin University of Maryland, College Park, MD 20742, USA Ensemble
Four-Dimensional Ensemble Kalman Filtering B.R. Hunt, E. Kalnay, E.J. Kostelich, E. Ott, D.J. Patil, T. Sauer, I. Szunyogh, J.A. Yorke, A.V. Zimin University of Maryland, College Park, MD 20742, USA Ensemble
( δx ) = δ dx = δu, etc. Course , General Circulation of the Earth's Atmosphere Prof. Peter Stone Section 2: Analysis Techniques
 = δ dx = δu, etc. Course , General Circulation of the Earth's Atmosphere Prof. Peter Stone Section 2: Analysis Techniques") Course 12.812, General Circulation of the Earth's Atmosphere Prof. Peter Stone Section 2: Analysis Techniques Pressure Coordinates: Most meteorological measurements are made in pressure coordinates, e.g.,
Course 12.812, General Circulation of the Earth's Atmosphere Prof. Peter Stone Section 2: Analysis Techniques Pressure Coordinates: Most meteorological measurements are made in pressure coordinates, e.g.,
Large-scale atmospheric circulation, semi-geostrophic motion and Lagrangian particle methods
 Large-scale atmospheric circulation, semi-geostrophic motion and Lagrangian particle methods Colin Cotter (Imperial College London) & Sebastian Reich (Universität Potsdam) Outline 1. Hydrostatic and semi-geostrophic
Large-scale atmospheric circulation, semi-geostrophic motion and Lagrangian particle methods Colin Cotter (Imperial College London) & Sebastian Reich (Universität Potsdam) Outline 1. Hydrostatic and semi-geostrophic
Localization in the ensemble Kalman Filter
 Department of Meteorology Localization in the ensemble Kalman Filter Ruth Elizabeth Petrie A dissertation submitted in partial fulfilment of the requirement for the degree of MSc. Atmosphere, Ocean and
Department of Meteorology Localization in the ensemble Kalman Filter Ruth Elizabeth Petrie A dissertation submitted in partial fulfilment of the requirement for the degree of MSc. Atmosphere, Ocean and
Ideas for adding flow-dependence to the Met Office VAR system
 Ideas for adding flow-dependence to the Met Office VAR system Andrew Lorenc Met Office, Exeter, UK andrew.lorenc@metoffice.gov.uk 1. Introduction The Met Office started developing variational assimilation
Ideas for adding flow-dependence to the Met Office VAR system Andrew Lorenc Met Office, Exeter, UK andrew.lorenc@metoffice.gov.uk 1. Introduction The Met Office started developing variational assimilation
Enhancing information transfer from observations to unobserved state variables for mesoscale radar data assimilation
 Enhancing information transfer from observations to unobserved state variables for mesoscale radar data assimilation Weiguang Chang and Isztar Zawadzki Department of Atmospheric and Oceanic Sciences Faculty
Enhancing information transfer from observations to unobserved state variables for mesoscale radar data assimilation Weiguang Chang and Isztar Zawadzki Department of Atmospheric and Oceanic Sciences Faculty
Variational ensemble DA at Météo-France Cliquez pour modifier le style des sous-titres du masque
 Cliquez pour modifier le style du titre Variational ensemble DA at Météo-France Cliquez pour modifier le style des sous-titres du masque L. Berre, G. Desroziers, H. Varella, L. Raynaud, C. Labadie and
Cliquez pour modifier le style du titre Variational ensemble DA at Météo-France Cliquez pour modifier le style des sous-titres du masque L. Berre, G. Desroziers, H. Varella, L. Raynaud, C. Labadie and
Formulation and performance of the Variable-Cubic Atmospheric Model
 Formulation and performance of the Variable-Cubic Atmospheric Model John McGregor CSIRO Marine and Atmospheric Research Aspendale, Melbourne Southern Hemisphere PDEs on the Sphere NCAR 11 April 2014 CSIRO
Formulation and performance of the Variable-Cubic Atmospheric Model John McGregor CSIRO Marine and Atmospheric Research Aspendale, Melbourne Southern Hemisphere PDEs on the Sphere NCAR 11 April 2014 CSIRO
Circulation and Vorticity
 Circulation and Vorticity Example: Rotation in the atmosphere water vapor satellite animation Circulation a macroscopic measure of rotation for a finite area of a fluid Vorticity a microscopic measure
Circulation and Vorticity Example: Rotation in the atmosphere water vapor satellite animation Circulation a macroscopic measure of rotation for a finite area of a fluid Vorticity a microscopic measure
Nowcasting for the London Olympics 2012 Brian Golding, Susan Ballard, Nigel Roberts & Ken Mylne Met Office, UK. Crown copyright Met Office
 Nowcasting for the London Olympics 2012 Brian Golding, Susan Ballard, Nigel Roberts & Ken Mylne Met Office, UK Outline Context MOGREPS-UK AQUM Weymouth Bay models Summary Forecasting System Generic Products
Nowcasting for the London Olympics 2012 Brian Golding, Susan Ballard, Nigel Roberts & Ken Mylne Met Office, UK Outline Context MOGREPS-UK AQUM Weymouth Bay models Summary Forecasting System Generic Products
Ting Lei, Xuguang Wang University of Oklahoma, Norman, OK, USA. Wang and Lei, MWR, Daryl Kleist (NCEP): dual resolution 4DEnsVar
: dual resolution 4DEnsVar") GSI-based four dimensional ensemble-variational (4DEnsVar) data assimilation: formulation and single resolution experiments with real data for NCEP GFS Ting Lei, Xuguang Wang University of Oklahoma, Norman,
GSI-based four dimensional ensemble-variational (4DEnsVar) data assimilation: formulation and single resolution experiments with real data for NCEP GFS Ting Lei, Xuguang Wang University of Oklahoma, Norman,
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
t tendency advection convergence twisting baroclinicity
 RELATIVE VORTICITY EQUATION Newton s law in a rotating frame in z-coordinate (frictionless): U + U U = 2Ω U Φ α p U + U U 2 + ( U) U = 2Ω U Φ α p Applying to both sides, and noting ω U and using identities
RELATIVE VORTICITY EQUATION Newton s law in a rotating frame in z-coordinate (frictionless): U + U U = 2Ω U Φ α p U + U U 2 + ( U) U = 2Ω U Φ α p Applying to both sides, and noting ω U and using identities
Atmospheric Fronts. The material in this section is based largely on. Lectures on Dynamical Meteorology by Roger Smith.
 Atmospheric Fronts The material in this section is based largely on Lectures on Dynamical Meteorology by Roger Smith. Atmospheric Fronts 2 Atmospheric Fronts A front is the sloping interfacial region of
Atmospheric Fronts The material in this section is based largely on Lectures on Dynamical Meteorology by Roger Smith. Atmospheric Fronts 2 Atmospheric Fronts A front is the sloping interfacial region of
Gaussian Filtering Strategies for Nonlinear Systems
 Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
Fundamental Meteo Concepts
 Fundamental Meteo Concepts Atmos 5110 Synoptic Dynamic Meteorology I Instructor: Jim Steenburgh jim.steenburgh@utah.edu 801-581-8727 Suite 480/Office 488 INSCC Suggested reading: Lackmann (2011), sections
Fundamental Meteo Concepts Atmos 5110 Synoptic Dynamic Meteorology I Instructor: Jim Steenburgh jim.steenburgh@utah.edu 801-581-8727 Suite 480/Office 488 INSCC Suggested reading: Lackmann (2011), sections
Dynamic Meteorology - Introduction
 Dynamic Meteorology - Introduction Atmospheric dynamics the study of atmospheric motions that are associated with weather and climate We will consider the atmosphere to be a continuous fluid medium, or
Dynamic Meteorology - Introduction Atmospheric dynamics the study of atmospheric motions that are associated with weather and climate We will consider the atmosphere to be a continuous fluid medium, or
Comparing Variational, Ensemble-based and Hybrid Data Assimilations at Regional Scales
 Comparing Variational, Ensemble-based and Hybrid Data Assimilations at Regional Scales Meng Zhang and Fuqing Zhang Penn State University Xiang-Yu Huang and Xin Zhang NCAR 4 th EnDA Workshop, Albany, NY
Comparing Variational, Ensemble-based and Hybrid Data Assimilations at Regional Scales Meng Zhang and Fuqing Zhang Penn State University Xiang-Yu Huang and Xin Zhang NCAR 4 th EnDA Workshop, Albany, NY
EnKF Review. P.L. Houtekamer 7th EnKF workshop Introduction to the EnKF. Challenges. The ultimate global EnKF algorithm
 Overview 1 2 3 Review of the Ensemble Kalman Filter for Atmospheric Data Assimilation 6th EnKF Purpose EnKF equations localization After the 6th EnKF (2014), I decided with Prof. Zhang to summarize progress
Overview 1 2 3 Review of the Ensemble Kalman Filter for Atmospheric Data Assimilation 6th EnKF Purpose EnKF equations localization After the 6th EnKF (2014), I decided with Prof. Zhang to summarize progress
The Advanced Research WRF (ARW) Dynamics Solver
 Dynamics Solver") Dynamics: Introduction The Advanced Research WRF (ARW) Dynamics Solver 1. What is a dynamics solver? 2. Variables and coordinates 3. Equations 4. Time integration scheme 5. Grid staggering 6. Advection
Dynamics: Introduction The Advanced Research WRF (ARW) Dynamics Solver 1. What is a dynamics solver? 2. Variables and coordinates 3. Equations 4. Time integration scheme 5. Grid staggering 6. Advection
( u,v). For simplicity, the density is considered to be a constant, denoted by ρ 0
. For simplicity, the density is considered to be a constant, denoted by ρ 0") ! Revised Friday, April 19, 2013! 1 Inertial Stability and Instability David Randall Introduction Inertial stability and instability are relevant to the atmosphere and ocean, and also in other contexts
! Revised Friday, April 19, 2013! 1 Inertial Stability and Instability David Randall Introduction Inertial stability and instability are relevant to the atmosphere and ocean, and also in other contexts
The dynamics of high and low pressure systems
 The dynamics of high and low pressure systems Newton s second law for a parcel of air in an inertial coordinate system (a coordinate system in which the coordinate axes do not change direction and are
The dynamics of high and low pressure systems Newton s second law for a parcel of air in an inertial coordinate system (a coordinate system in which the coordinate axes do not change direction and are
GSI 3DVar-based Ensemble-Variational Hybrid Data Assimilation for NCEP Global Forecast System: Single Resolution Experiments
 1 2 GSI 3DVar-based Ensemble-Variational Hybrid Data Assimilation for NCEP Global Forecast System: Single Resolution Experiments 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29
1 2 GSI 3DVar-based Ensemble-Variational Hybrid Data Assimilation for NCEP Global Forecast System: Single Resolution Experiments 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29
Univ. of Maryland-College Park, Dept. of Atmos. & Oceanic Science. NOAA/NCEP/Environmental Modeling Center
 The Tangent Linear Normal Mode Constraint in GSI: Applications in the NCEP GFS/GDAS Hybrid EnVar system and Future Developments Daryl Kleist 1 David Parrish 2, Catherine Thomas 1,2 1 Univ. of Maryland-College
The Tangent Linear Normal Mode Constraint in GSI: Applications in the NCEP GFS/GDAS Hybrid EnVar system and Future Developments Daryl Kleist 1 David Parrish 2, Catherine Thomas 1,2 1 Univ. of Maryland-College
Weather Forecasting Models in Met Éireann. Eoin Whelan UCD Seminar 3 rd April 2012
 Weather Forecasting Models in Met Éireann Eoin Whelan UCD Seminar 3 rd April 2012 Overview Background HIRLAM Models Local Implementation Verification Development work Background Met Éireann Dept of the
Weather Forecasting Models in Met Éireann Eoin Whelan UCD Seminar 3 rd April 2012 Overview Background HIRLAM Models Local Implementation Verification Development work Background Met Éireann Dept of the
A Hamiltonian Numerical Scheme for Large Scale Geophysical Fluid Systems
 A Hamiltonian Numerical Scheme for Large Scale Geophysical Fluid Systems Bob Peeters Joint work with Onno Bokhove & Jason Frank TW, University of Twente, Enschede CWI, Amsterdam PhD-TW colloquium, 9th
A Hamiltonian Numerical Scheme for Large Scale Geophysical Fluid Systems Bob Peeters Joint work with Onno Bokhove & Jason Frank TW, University of Twente, Enschede CWI, Amsterdam PhD-TW colloquium, 9th
Using Observations at Different Spatial. Scales in Data Assimilation for. Environmental Prediction. Joanne A. Waller
 UNIVERSITY OF READING DEPARTMENT OF MATHEMATICS AND STATISTICS Using Observations at Different Spatial Scales in Data Assimilation for Environmental Prediction Joanne A. Waller Thesis submitted for the
UNIVERSITY OF READING DEPARTMENT OF MATHEMATICS AND STATISTICS Using Observations at Different Spatial Scales in Data Assimilation for Environmental Prediction Joanne A. Waller Thesis submitted for the
Introduction to Data Assimilation. Saroja Polavarapu Meteorological Service of Canada University of Toronto
 Introduction to Data Assimilation Saroja Polavarapu Meteorological Service of Canada University of Toronto GCC Summer School, Banff. May 22-28, 2004 Outline of lectures General idea Numerical weather prediction
Introduction to Data Assimilation Saroja Polavarapu Meteorological Service of Canada University of Toronto GCC Summer School, Banff. May 22-28, 2004 Outline of lectures General idea Numerical weather prediction
ECMWF Overview. The European Centre for Medium-Range Weather Forecasts is an international. organisation supported by 23 European States.
 ECMWF Overview The European Centre for Medium-Range Weather Forecasts is an international organisation supported by 3 European States. The center was established in 1973 by a Convention and the real-time
ECMWF Overview The European Centre for Medium-Range Weather Forecasts is an international organisation supported by 3 European States. The center was established in 1973 by a Convention and the real-time
A HYBRID ENSEMBLE KALMAN FILTER / 3D-VARIATIONAL ANALYSIS SCHEME
 A HYBRID ENSEMBLE KALMAN FILTER / 3D-VARIATIONAL ANALYSIS SCHEME Thomas M. Hamill and Chris Snyder National Center for Atmospheric Research, Boulder, Colorado 1. INTRODUCTION Given the chaotic nature of
A HYBRID ENSEMBLE KALMAN FILTER / 3D-VARIATIONAL ANALYSIS SCHEME Thomas M. Hamill and Chris Snyder National Center for Atmospheric Research, Boulder, Colorado 1. INTRODUCTION Given the chaotic nature of
Comparison of 3D-Var and LETKF in an Atmospheric GCM: SPEEDY
 Comparison of 3D-Var and LEKF in an Atmospheric GCM: SPEEDY Catherine Sabol Kayo Ide Eugenia Kalnay, akemasa Miyoshi Weather Chaos, UMD 9 April 2012 Outline SPEEDY Formulation Single Observation Eperiments
Comparison of 3D-Var and LEKF in an Atmospheric GCM: SPEEDY Catherine Sabol Kayo Ide Eugenia Kalnay, akemasa Miyoshi Weather Chaos, UMD 9 April 2012 Outline SPEEDY Formulation Single Observation Eperiments
1/18/2011. Conservation of Momentum Conservation of Mass Conservation of Energy Scaling Analysis ESS227 Prof. Jin-Yi Yu
 Lecture 2: Basic Conservation Laws Conservation Law of Momentum Newton s 2 nd Law of Momentum = absolute velocity viewed in an inertial system = rate of change of Ua following the motion in an inertial
Lecture 2: Basic Conservation Laws Conservation Law of Momentum Newton s 2 nd Law of Momentum = absolute velocity viewed in an inertial system = rate of change of Ua following the motion in an inertial
Ensemble 4DVAR and observa3on impact study with the GSIbased hybrid ensemble varia3onal data assimila3on system. for the GFS
 Ensemble 4DVAR and observa3on impact study with the GSIbased hybrid ensemble varia3onal data assimila3on system for the GFS Xuguang Wang University of Oklahoma, Norman, OK xuguang.wang@ou.edu Ting Lei,
Ensemble 4DVAR and observa3on impact study with the GSIbased hybrid ensemble varia3onal data assimila3on system for the GFS Xuguang Wang University of Oklahoma, Norman, OK xuguang.wang@ou.edu Ting Lei,
Analysis sensitivity calculation in an Ensemble Kalman Filter
 Analysis sensitivity calculation in an Ensemble Kalman Filter Junjie Liu 1, Eugenia Kalnay 2, Takemasa Miyoshi 2, and Carla Cardinali 3 1 University of California, Berkeley, CA, USA 2 University of Maryland,
Analysis sensitivity calculation in an Ensemble Kalman Filter Junjie Liu 1, Eugenia Kalnay 2, Takemasa Miyoshi 2, and Carla Cardinali 3 1 University of California, Berkeley, CA, USA 2 University of Maryland,
Dynamics Rotating Tank
 Institute for Atmospheric and Climate Science - IACETH Atmospheric Physics Lab Work Dynamics Rotating Tank Large scale flows on different latitudes of the rotating Earth Abstract The large scale atmospheric
Institute for Atmospheric and Climate Science - IACETH Atmospheric Physics Lab Work Dynamics Rotating Tank Large scale flows on different latitudes of the rotating Earth Abstract The large scale atmospheric
Fundamentals of Data Assimila1on
 014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
Bulk Boundary-Layer Model
 Bulk Boundary-Layer Model David Randall Ball (1960) was the first to propose a model in which the interior of the planetary boundary layer (PBL) is well-mixed in the conservative variables, while the PBL
Bulk Boundary-Layer Model David Randall Ball (1960) was the first to propose a model in which the interior of the planetary boundary layer (PBL) is well-mixed in the conservative variables, while the PBL
Quarterly Journal of the Royal Meteorological Society !"#$%&'&(&)"&'*'+'*%(,#$,-$#*'."(/'*0'"(#"(1"&)23$)(4#$2#"( 5'$*)6!
&'*'+'*%(,#$,-$#*'.(/'*0'(#(1&)23$)(4#$2#( 5'$*)6!") !"#$%&'&(&)"&'*'+'*%(,#$,-$#*'."(/'*0'"(#"("&)$)(#$#"( '$*)! "#$%&'()!!"#$%&$'()*+"$,#')+-)%.&)/+(#')0&%&+$+'+#')+&%(! *'&$+,%-./!0)! "! :-(;%/-,(;! '/;!?$@A-//;B!@
!"#$%&'&(&)"&'*'+'*%(,#$,-$#*'."(/'*0'"(#"("&)$)(#$#"( '$*)! "#$%&'()!!"#$%&$'()*+"$,#')+-)%.&)/+(#')0&%&+$+'+#')+&%(! *'&$+,%-./!0)! "! :-(;%/-,(;! '/;!?$@A-//;B!@
Chapter 9. Geostrophy, Quasi-Geostrophy and the Potential Vorticity Equation
 Chapter 9 Geostrophy, Quasi-Geostrophy and the Potential Vorticity Equation 9.1 Geostrophy and scaling. We examined in the last chapter some consequences of the dynamical balances for low frequency, nearly
Chapter 9 Geostrophy, Quasi-Geostrophy and the Potential Vorticity Equation 9.1 Geostrophy and scaling. We examined in the last chapter some consequences of the dynamical balances for low frequency, nearly
Lateral Boundary Conditions
 Lateral Boundary Conditions Introduction For any non-global numerical simulation, the simulation domain is finite. Consequently, some means of handling the outermost extent of the simulation domain its
Lateral Boundary Conditions Introduction For any non-global numerical simulation, the simulation domain is finite. Consequently, some means of handling the outermost extent of the simulation domain its
Strongly coupled data assimilation: Could scatterometer winds improve ocean analyses?
 Strongly coupled data assimilation: Could scatterometer winds improve ocean analyses? Sergey Frolov 1 Craig H. Bishop 2 ; Teddy Holt 2 ; James Cummings 3 ; David Kuhl 4 1 UCAR, Visiting Scientist 2 Naval
Strongly coupled data assimilation: Could scatterometer winds improve ocean analyses? Sergey Frolov 1 Craig H. Bishop 2 ; Teddy Holt 2 ; James Cummings 3 ; David Kuhl 4 1 UCAR, Visiting Scientist 2 Naval
Ji-Sun Kang. Pr. Eugenia Kalnay (Chair/Advisor) Pr. Ning Zeng (Co-Chair) Pr. Brian Hunt (Dean s representative) Pr. Kayo Ide Pr.
 Pr. Ning Zeng (Co-Chair) Pr. Brian Hunt (Dean s representative) Pr. Kayo Ide Pr.") Carbon Cycle Data Assimilation Using a Coupled Atmosphere-Vegetation Model and the LETKF Ji-Sun Kang Committee in charge: Pr. Eugenia Kalnay (Chair/Advisor) Pr. Ning Zeng (Co-Chair) Pr. Brian Hunt (Dean
Carbon Cycle Data Assimilation Using a Coupled Atmosphere-Vegetation Model and the LETKF Ji-Sun Kang Committee in charge: Pr. Eugenia Kalnay (Chair/Advisor) Pr. Ning Zeng (Co-Chair) Pr. Brian Hunt (Dean
JP1J.9 ASSIMILATION OF RADAR DATA IN THE MET OFFICE MESOSCALE AND CONVECTIVE SCALE FORECAST SYSTEMS
 JP1J.9 ASSIMILATION OF RADAR DATA IN THE MET OFFICE MESOSCALE AND CONVECTIVE SCALE FORECAST SYSTEMS S. Ballard *, M. Dixon, S. Swarbrick,, Z. Li,, O.Stiller, H. Lean, F. Rihan 2 and C.Collier 2 Met Office
JP1J.9 ASSIMILATION OF RADAR DATA IN THE MET OFFICE MESOSCALE AND CONVECTIVE SCALE FORECAST SYSTEMS S. Ballard *, M. Dixon, S. Swarbrick,, Z. Li,, O.Stiller, H. Lean, F. Rihan 2 and C.Collier 2 Met Office
Latest thoughts on stochastic kinetic energy backscatter - good and bad
 Latest thoughts on stochastic kinetic energy backscatter - good and bad by Glenn Shutts DARC Reading University May 15 2013 Acknowledgments ECMWF for supporting this work Martin Leutbecher Martin Steinheimer
Latest thoughts on stochastic kinetic energy backscatter - good and bad by Glenn Shutts DARC Reading University May 15 2013 Acknowledgments ECMWF for supporting this work Martin Leutbecher Martin Steinheimer
The Hydrostatic Approximation. - Euler Equations in Spherical Coordinates. - The Approximation and the Equations
 OUTLINE: The Hydrostatic Approximation - Euler Equations in Spherical Coordinates - The Approximation and the Equations - Critique of Hydrostatic Approximation Inertial Instability - The Phenomenon - The
OUTLINE: The Hydrostatic Approximation - Euler Equations in Spherical Coordinates - The Approximation and the Equations - Critique of Hydrostatic Approximation Inertial Instability - The Phenomenon - The
Doppler radial wind spatially correlated observation error: operational implementation and initial results
 Doppler radial wind spatially correlated observation error: operational implementation and initial results D. Simonin, J. Waller, G. Kelly, S. Ballard,, S. Dance, N. Nichols (Met Office, University of
Doppler radial wind spatially correlated observation error: operational implementation and initial results D. Simonin, J. Waller, G. Kelly, S. Ballard,, S. Dance, N. Nichols (Met Office, University of
Local Ensemble Transform Kalman Filter
 Local Ensemble Transform Kalman Filter Brian Hunt 11 June 2013 Review of Notation Forecast model: a known function M on a vector space of model states. Truth: an unknown sequence {x n } of model states
Local Ensemble Transform Kalman Filter Brian Hunt 11 June 2013 Review of Notation Forecast model: a known function M on a vector space of model states. Truth: an unknown sequence {x n } of model states
Variational data assimilation of lightning with WRFDA system using nonlinear observation operators
 Variational data assimilation of lightning with WRFDA system using nonlinear observation operators Virginia Tech, Blacksburg, Virginia Florida State University, Tallahassee, Florida rstefane@vt.edu, inavon@fsu.edu
Variational data assimilation of lightning with WRFDA system using nonlinear observation operators Virginia Tech, Blacksburg, Virginia Florida State University, Tallahassee, Florida rstefane@vt.edu, inavon@fsu.edu
Computational challenges in Numerical Weather Prediction
 Computational challenges in Numerical Weather Prediction Mike Cullen Oxford 15 September 2008 Contents This presentation covers the following areas Historical background Current challenges Why does it
Computational challenges in Numerical Weather Prediction Mike Cullen Oxford 15 September 2008 Contents This presentation covers the following areas Historical background Current challenges Why does it
Nonlinear Balance on an Equatorial Beta Plane
 Nonlinear Balance on an Equatorial Beta Plane David J. Raymond Physics Department and Geophysical Research Center New Mexico Tech Socorro, NM 87801 April 26, 2009 Summary Extension of the nonlinear balance
Nonlinear Balance on an Equatorial Beta Plane David J. Raymond Physics Department and Geophysical Research Center New Mexico Tech Socorro, NM 87801 April 26, 2009 Summary Extension of the nonlinear balance
Error (E) Covariance Diagnostics. in Ensemble Data Assimilation. Kayo Ide, Daryl Kleist, Adam Kubaryk University of Maryland
 Covariance Diagnostics. in Ensemble Data Assimilation. Kayo Ide, Daryl Kleist, Adam Kubaryk University of Maryland") Error (E) Covariance Diagnostics in Ensemble Data Assimilation Kayo Ide, Daryl Kleist, Adam Kubaryk University of Maryland 7 th EnKF Data Assimilation Workshop May 2016 Outline Part I. Background: E-diagnostics
Error (E) Covariance Diagnostics in Ensemble Data Assimilation Kayo Ide, Daryl Kleist, Adam Kubaryk University of Maryland 7 th EnKF Data Assimilation Workshop May 2016 Outline Part I. Background: E-diagnostics
A Note on the Particle Filter with Posterior Gaussian Resampling
 Tellus (6), 8A, 46 46 Copyright C Blackwell Munksgaard, 6 Printed in Singapore. All rights reserved TELLUS A Note on the Particle Filter with Posterior Gaussian Resampling By X. XIONG 1,I.M.NAVON 1,2 and
Tellus (6), 8A, 46 46 Copyright C Blackwell Munksgaard, 6 Printed in Singapore. All rights reserved TELLUS A Note on the Particle Filter with Posterior Gaussian Resampling By X. XIONG 1,I.M.NAVON 1,2 and
Lecture 3. Turbulent fluxes and TKE budgets (Garratt, Ch 2)
") Lecture 3. Turbulent fluxes and TKE budgets (Garratt, Ch 2) The ABL, though turbulent, is not homogeneous, and a critical role of turbulence is transport and mixing of air properties, especially in the
Lecture 3. Turbulent fluxes and TKE budgets (Garratt, Ch 2) The ABL, though turbulent, is not homogeneous, and a critical role of turbulence is transport and mixing of air properties, especially in the