Global Motion. Estimate motion using all pixels in the image. Parametric flow gives an equation, which describes optical flow for each pixel.
|
|
|
- Pauline Park
- 5 years ago
- Views:
Transcription
1 Globl Flow
2 Globl Motion Estimte motion using ll piels in the imge. Prmetric low gives n eqution, which describes opticl low or ech piel. Aine Projective Globl motion cn be used to generte mosics Object-bsed segmenttion
3 Bergn et l Aine
4 Aine (0,0) (,) (,) (0,0) (,) (, ) Imge t t Imge t t- 4 3 ), ( ), ( b v b u X X U v u
5 Aine 4 3 ), ( ), ( b v b u 4 3 b b v u
")
6 Sptil Trnsormtions trnsltion rottion sher Rigid (rottion nd trnsltion) ine
7 Bergn et l Aine 4 3 ), ( ), ( b v b u ), ( ), ( b b v u X u ) ( ) (
8 Bergn et l Opticl low constrint eq X u ) ( ) ( t v u ), ( ) ( ) ( u u T t E ), ( ) ( ) ( X() T t E ), ( ) ( ) ( E T t X X
9 Bergn et l min Liner sstem ), ( ) ( ) ( E T t X t X T T X X T X X X ) ( ( A B Homework
10 Bsic Components Prmid construction Motion estimtion Imge wrping Corse-to-ine reinement
11 Corse-to-ine globl low estimtion u=.5 piels u=.5 piels u=5 piels imge H u=0 piels imge I Gussin prmid o imge H Gussin prmid o imge I
12 Corse-to-ine globl low estimtion Compute Globl Flow Itertivel wrp & upsmple Compute Globl Flow Itertivel... imge JH Gussin prmid o imge H imge I Gussin prmid o imge I
13 0 Level= W M W * + * W Level= W M + W * * W Level=0 (,,t-) W + 3 (,,t-) M 3 (,,t)

14 Estimtion o Globl Flow Single Itertion Compute A nd B Solve A B Imge t Imge t+ Wrp b
15 Estimtion o Globl Flow Initil Estimte T b 3 4 b Itertive Imge t Imge t+ Wrp b Compute A nd B Solve A B Wrp b
16 Estimtion o Globl Flow Initil Estimte T b 3 4 b Itertive Iterte Imge t Imge t+ Wrp b Compute A nd B Solve A B Updte
17 Imge Wrping Wrping n imge into imge h using some trnsormtion g, involves mpping intensit t ech piel (,) in imge to piel (g(),g()) in imge h such tht (, ) ( g( ), g( )) In cse o ine trnsormtion, (, ) is trnsormed to s: A b (, ) U A b Displcement model Instntneous model
")
 wrp ( X, t")
 X A ( ) (")
18 Imge Wrping (Bergn et l) ( X, t ) ( X, t) wrp ( X, t ) A ( ) ( X b) X A ( ) ( X b) X
19 Imge Wrping Imge t time t: X Imge t time t-: X X X X U ( AX b) ( A) X X ( X b) X


20 Imge Wrping How bout vlues in re not integer. But imge is smpled onl t integer rows nd columns Insted o converting to nd coping t we cn convert integer vlues to nd cop t
 wrp ( X, t )")
21 Imge Wrping ( X, t ) ( X, t) wrp ( X, t )

22 Imge Wrping But how bout the vlues in re not integer. Perorm biliner interpoltion to compute t non-integer vlues.


23 Wrping



24 Video Mosic


25 Video Mosic


26 mosic Video Mosic

27 Sprite
28 Mnn & Picrd Projective
29 Projective Flow (weighted) u u v T t t 0 0 Opticl Flow const. eqution A b C T A b u T C Projective trnsorm
30 Projective Flow (weighted) low ( u T X t A b T (( ) T t C ) ) T T T (( A b ( C ) ) ( C ) t ) minimize Homework
31 Projective Flow (weighted) ],,,,,,, [ t t t ) ( ) ( t T T T c c b b 4 3,,,,,,,
32 Projective Flow (unweighted)
33 Pseudo-Perspective Tlor Series T C b A v u
34 Biliner Tlor Series & remove Squre terms T C b A v u
35 Projective Flow (unweighted) low ( u T X t ) Minimize
36 Biliner nd Pseudo-Perspective ( T )q t T (,,,),,,, biliner c c T (,,),,,, c, c Pseudo perspective Homework
37 Algorithm- Estimte q (using pproimte model, e.g. biliner model). Relte q to p select our points S, S, S3, S4 ppl pproimte model using q to compute estimte ect p : (, ) k k
38

39 True Projective c 3 c c c 4 b b
40 Perorm lest squres it to compute. A P k k k k k k k k k k k k
41 Finl Algorithm A Gussin prmid o three or our levels is constructed or ech rme in the sequence. The prmeters p re estimted t the top level o the prmid, between the two lowest resolution imges, g nd h, using lgorithm-.
42 Finl Algorithm The estimted p is pplied to the net higher resolution imge in the prmid, to mke imges t tht level nerl congruent. The process continues down the prmid until the highest resolution imge in the prmid is reched.
43 Video Mosics Mosic ligns dierent pieces o scene into lrger piece, nd semlessl blend them. High resolution imge rom low resolution imges Incresed iled o view
44 Steps in Generting A Mosic Tke pictures Pick reerence imge Determine trnsormtion between rmes Wrp ll imges to the sme reerence view
45 Applictions o Mosics Virtul Environments Computer Gmes Movie Specil Eects Video Compression

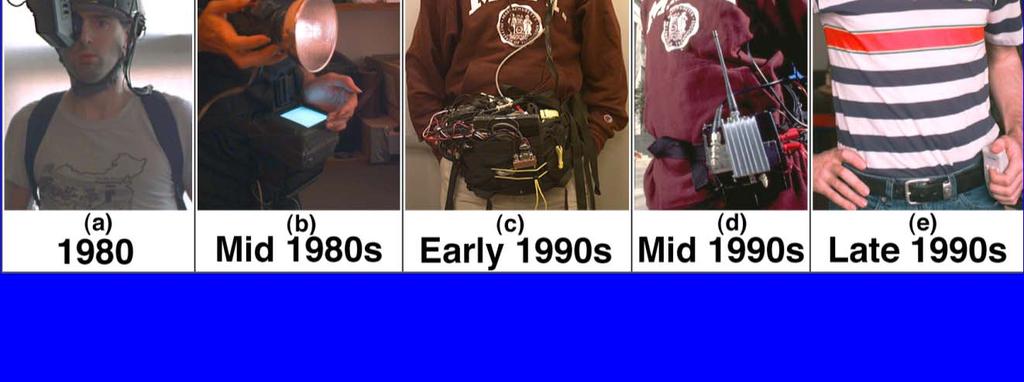
46 Steve Mnn
47 Sequence o Imges

48 Projective Mosic


49 Aine Mosic

50 Building

51 Wl-Mrt

52 Scientiic Americn Frontiers

53 Scientiic Americn Frontiers

54 Hed-mounted Cmer t Resturnt

55 MIT Medi Lb



56 COCOA: A Sstem or Processing o Aeril Videos


57 COCOA Sstem Flow Aeril Video Telemetr* Ego Motion Compenstion Feture bsed + Grdient Bsed Motion Detection Accumultive Frme Dierencing + Bckground Modeling + Object Segmenttion Object Trcking Kernel Trcking + Blob Trcking + Occlusion Hndling COCOA Registered Imges Motion Detection Trcks Event Detection & Indeing


58 Registrtion Result - I Aeril Video - EO Mosic Alignment Msk


59 Registrtion Result - II Aeril Video - IR Mosic Alignment Msk

60 Detection Result


61 Trcking Results
62 Reerences (C code or generting mosics) The Lplcin Prmid s compct code, Burt nd Adelson, IEEE Trns on Communiction, 983. J. Bergen, P. Anndn, K. Hnn, nd R. Hingorni, Hierrchicl Model-Bsed Motion Estimtion, ECCV-9, pp 37-.
63 Reerences s/mosics.html ( Eicient representtions o video sequences nd their pplictions, Michl Irni, P. Anndn, Jim Bergen, Rkesh Kumr, nd Steve Hsu) R. Szeliski. Video mosics or virtul environments, IEEE Computer Grphics nd Applictions, pges,-30, Mrch 996.
Visual motion. Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys
 Visul motion Mn slides dpted from S. Seitz, R. Szeliski, M. Pollefes Outline Applictions of segmenttion to video Motion nd perceptul orgniztion Motion field Opticl flow Motion segmenttion with lers Video
Visul motion Mn slides dpted from S. Seitz, R. Szeliski, M. Pollefes Outline Applictions of segmenttion to video Motion nd perceptul orgniztion Motion field Opticl flow Motion segmenttion with lers Video
A Planar Perspective Image Matching using Point Correspondences and Rectangle-to-Quadrilateral Mapping
 Plnr Perspective Ige tching using Point Correspondences nd Rectngle-to-Qudrilterl pping Dong-Keun Ki Deprtent of Coputer nd Infortion Science Seon Universit Jeonbuk Nwon Kore dgki@tiger.seon.c.kr Bung-Te
Plnr Perspective Ige tching using Point Correspondences nd Rectngle-to-Qudrilterl pping Dong-Keun Ki Deprtent of Coputer nd Infortion Science Seon Universit Jeonbuk Nwon Kore dgki@tiger.seon.c.kr Bung-Te
Lecture 8 Wrap-up Part1, Matlab
 Lecture 8 Wrp-up Prt1, Mtlb Homework Polic Plese stple our homework (ou will lose 10% credit if not stpled or secured) Submit ll problems in order. This mens to plce ever item relting to problem 3 (our
Lecture 8 Wrp-up Prt1, Mtlb Homework Polic Plese stple our homework (ou will lose 10% credit if not stpled or secured) Submit ll problems in order. This mens to plce ever item relting to problem 3 (our
Reinforcement learning II
 CS 1675 Introduction to Mchine Lerning Lecture 26 Reinforcement lerning II Milos Huskrecht milos@cs.pitt.edu 5329 Sennott Squre Reinforcement lerning Bsics: Input x Lerner Output Reinforcement r Critic
CS 1675 Introduction to Mchine Lerning Lecture 26 Reinforcement lerning II Milos Huskrecht milos@cs.pitt.edu 5329 Sennott Squre Reinforcement lerning Bsics: Input x Lerner Output Reinforcement r Critic
1 Linear Least Squares
 Lest Squres Pge 1 1 Liner Lest Squres I will try to be consistent in nottion, with n being the number of dt points, nd m < n being the number of prmeters in model function. We re interested in solving
Lest Squres Pge 1 1 Liner Lest Squres I will try to be consistent in nottion, with n being the number of dt points, nd m < n being the number of prmeters in model function. We re interested in solving
New data structures to reduce data size and search time
 New dt structures to reduce dt size nd serch time Tsuneo Kuwbr Deprtment of Informtion Sciences, Fculty of Science, Kngw University, Hirtsuk-shi, Jpn FIT2018 1D-1, No2, pp1-4 Copyright (c)2018 by The Institute
New dt structures to reduce dt size nd serch time Tsuneo Kuwbr Deprtment of Informtion Sciences, Fculty of Science, Kngw University, Hirtsuk-shi, Jpn FIT2018 1D-1, No2, pp1-4 Copyright (c)2018 by The Institute
Graduate Students do all problems. Undergraduate students choose three problems.
 OPTI 45/55 Midterm Due: Februr, Grdute Students do ll problems. Undergrdute students choose three problems.. Google Erth is improving the resolution of its globl mps with dt from the SPOT5 stellite. The
OPTI 45/55 Midterm Due: Februr, Grdute Students do ll problems. Undergrdute students choose three problems.. Google Erth is improving the resolution of its globl mps with dt from the SPOT5 stellite. The
The Islamic University of Gaza Faculty of Engineering Civil Engineering Department. Numerical Analysis ECIV Chapter 11
 The Islmic University of Gz Fculty of Engineering Civil Engineering Deprtment Numericl Anlysis ECIV 6 Chpter Specil Mtrices nd Guss-Siedel Associte Prof Mzen Abultyef Civil Engineering Deprtment, The Islmic
The Islmic University of Gz Fculty of Engineering Civil Engineering Deprtment Numericl Anlysis ECIV 6 Chpter Specil Mtrices nd Guss-Siedel Associte Prof Mzen Abultyef Civil Engineering Deprtment, The Islmic
Chapter 3 Single Random Variables and Probability Distributions (Part 2)
") Chpter 3 Single Rndom Vriles nd Proilit Distriutions (Prt ) Contents Wht is Rndom Vrile? Proilit Distriution Functions Cumultive Distriution Function Proilit Densit Function Common Rndom Vriles nd their
Chpter 3 Single Rndom Vriles nd Proilit Distriutions (Prt ) Contents Wht is Rndom Vrile? Proilit Distriution Functions Cumultive Distriution Function Proilit Densit Function Common Rndom Vriles nd their
We will see what is meant by standard form very shortly
 THEOREM: For fesible liner progrm in its stndrd form, the optimum vlue of the objective over its nonempty fesible region is () either unbounded or (b) is chievble t lest t one extreme point of the fesible
THEOREM: For fesible liner progrm in its stndrd form, the optimum vlue of the objective over its nonempty fesible region is () either unbounded or (b) is chievble t lest t one extreme point of the fesible
1 Part II: Numerical Integration
 Mth 4 Lb 1 Prt II: Numericl Integrtion This section includes severl techniques for getting pproimte numericl vlues for definite integrls without using ntiderivtives. Mthemticll, ect nswers re preferble
Mth 4 Lb 1 Prt II: Numericl Integrtion This section includes severl techniques for getting pproimte numericl vlues for definite integrls without using ntiderivtives. Mthemticll, ect nswers re preferble
Counting intersections of spirals on a torus
 Counting intersections of spirls on torus 1 The problem Consider unit squre with opposite sides identified. For emple, if we leve the centre of the squre trveling long line of slope 2 (s shown in the first
Counting intersections of spirls on torus 1 The problem Consider unit squre with opposite sides identified. For emple, if we leve the centre of the squre trveling long line of slope 2 (s shown in the first
Why symmetry? Symmetry is often argued from the requirement that the strain energy must be positive. (e.g. Generalized 3-D Hooke s law)
") Why symmetry? Symmetry is oten rgued rom the requirement tht the strin energy must be positie. (e.g. Generlized -D Hooke s lw) One o the derities o energy principles is the Betti- Mxwell reciprocity theorem.
Why symmetry? Symmetry is oten rgued rom the requirement tht the strin energy must be positie. (e.g. Generlized -D Hooke s lw) One o the derities o energy principles is the Betti- Mxwell reciprocity theorem.
In-Class Problems 2 and 3: Projectile Motion Solutions. In-Class Problem 2: Throwing a Stone Down a Hill
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Deprtment of Physics Physics 8T Fll Term 4 In-Clss Problems nd 3: Projectile Motion Solutions We would like ech group to pply the problem solving strtegy with the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Deprtment of Physics Physics 8T Fll Term 4 In-Clss Problems nd 3: Projectile Motion Solutions We would like ech group to pply the problem solving strtegy with the
Department of Chemical Engineering ChE-101: Approaches to Chemical Engineering Problem Solving MATLAB Tutorial VII
 Tutoril VII: Liner Regression Lst updted 5/8/06 b G.G. Botte Deprtment of Chemicl Engineering ChE-0: Approches to Chemicl Engineering Problem Solving MATLAB Tutoril VII Liner Regression Using Lest Squre
Tutoril VII: Liner Regression Lst updted 5/8/06 b G.G. Botte Deprtment of Chemicl Engineering ChE-0: Approches to Chemicl Engineering Problem Solving MATLAB Tutoril VII Liner Regression Using Lest Squre
Multiple Integrals. Review of Single Integrals. Planar Area. Volume of Solid of Revolution
 Multiple Integrls eview of Single Integrls eding Trim 7.1 eview Appliction of Integrls: Are 7. eview Appliction of Integrls: Volumes 7.3 eview Appliction of Integrls: Lengths of Curves Assignment web pge
Multiple Integrls eview of Single Integrls eding Trim 7.1 eview Appliction of Integrls: Are 7. eview Appliction of Integrls: Volumes 7.3 eview Appliction of Integrls: Lengths of Curves Assignment web pge
Visual Quality for both Images and Display of Systems by Visual Enhancement under Low-Backlight
 Interntionl Journl o Modern Engineering Reserch IJMER wwwijmercom Vol 3 Issue 4 Jul - Aug 03 pp-073-078 ISSN: 49-6645 Visul Qulit or both Imges nd Displ o Sstems b Visul Enhncement under Low-cklight M
Interntionl Journl o Modern Engineering Reserch IJMER wwwijmercom Vol 3 Issue 4 Jul - Aug 03 pp-073-078 ISSN: 49-6645 Visul Qulit or both Imges nd Displ o Sstems b Visul Enhncement under Low-cklight M
M344 - ADVANCED ENGINEERING MATHEMATICS
 M3 - ADVANCED ENGINEERING MATHEMATICS Lecture 18: Lplce s Eqution, Anltic nd Numericl Solution Our emple of n elliptic prtil differentil eqution is Lplce s eqution, lso clled the Diffusion Eqution. If
M3 - ADVANCED ENGINEERING MATHEMATICS Lecture 18: Lplce s Eqution, Anltic nd Numericl Solution Our emple of n elliptic prtil differentil eqution is Lplce s eqution, lso clled the Diffusion Eqution. If
Quadrature Rules for Evaluation of Hyper Singular Integrals
 Applied Mthemticl Sciences, Vol., 01, no. 117, 539-55 HIKARI Ltd, www.m-hikri.com http://d.doi.org/10.19/ms.01.75 Qudrture Rules or Evlution o Hyper Singulr Integrls Prsnt Kumr Mohnty Deprtment o Mthemtics
Applied Mthemticl Sciences, Vol., 01, no. 117, 539-55 HIKARI Ltd, www.m-hikri.com http://d.doi.org/10.19/ms.01.75 Qudrture Rules or Evlution o Hyper Singulr Integrls Prsnt Kumr Mohnty Deprtment o Mthemtics
Module 6 Value Iteration. CS 886 Sequential Decision Making and Reinforcement Learning University of Waterloo
 Module 6 Vlue Itertion CS 886 Sequentil Decision Mking nd Reinforcement Lerning University of Wterloo Mrkov Decision Process Definition Set of sttes: S Set of ctions (i.e., decisions): A Trnsition model:
Module 6 Vlue Itertion CS 886 Sequentil Decision Mking nd Reinforcement Lerning University of Wterloo Mrkov Decision Process Definition Set of sttes: S Set of ctions (i.e., decisions): A Trnsition model:
An efficient fractional-pixel motion compensation based on Cubic convolution interpolation
 Journl of Electricl nd Electronic Engineering 2014; 2(3): 47-54 Published online September 20, 2014 (http://www.sciencepublishinggroup.com/j/jeee) doi: 10.11648/j.jeee.20140203.11 ISSN: 2329-1613 (Print);
Journl of Electricl nd Electronic Engineering 2014; 2(3): 47-54 Published online September 20, 2014 (http://www.sciencepublishinggroup.com/j/jeee) doi: 10.11648/j.jeee.20140203.11 ISSN: 2329-1613 (Print);
Administrivia CSE 190: Reinforcement Learning: An Introduction
 Administrivi CSE 190: Reinforcement Lerning: An Introduction Any emil sent to me bout the course should hve CSE 190 in the subject line! Chpter 4: Dynmic Progrmming Acknowledgment: A good number of these
Administrivi CSE 190: Reinforcement Lerning: An Introduction Any emil sent to me bout the course should hve CSE 190 in the subject line! Chpter 4: Dynmic Progrmming Acknowledgment: A good number of these
STATISTICAL PROCESSING OF STRAIGHT EQUISPACED FRINGE PATTERNS
 Journl of Optoelectronics nd dvnced Mterils Vol. 6 o. 3 September 4 p. 84-855 SSCL PROCESSG OF SRGH EQUSPCED FRGE PERS V. scov *. Dobroiu D. postol V. Dmin tionl nstitute for Lser Plsm nd Rdition Phsics
Journl of Optoelectronics nd dvnced Mterils Vol. 6 o. 3 September 4 p. 84-855 SSCL PROCESSG OF SRGH EQUSPCED FRGE PERS V. scov *. Dobroiu D. postol V. Dmin tionl nstitute for Lser Plsm nd Rdition Phsics
APPLICATIONS OF DEFINITE INTEGRALS
 Chpter 6 APPICATIONS OF DEFINITE INTEGRAS OVERVIEW In Chpter 5 we discovered the connection etween Riemnn sums ssocited with prtition P of the finite closed intervl [, ] nd the process of integrtion. We
Chpter 6 APPICATIONS OF DEFINITE INTEGRAS OVERVIEW In Chpter 5 we discovered the connection etween Riemnn sums ssocited with prtition P of the finite closed intervl [, ] nd the process of integrtion. We
Data Assimilation. Alan O Neill Data Assimilation Research Centre University of Reading
 Dt Assimiltion Aln O Neill Dt Assimiltion Reserch Centre University of Reding Contents Motivtion Univrite sclr dt ssimiltion Multivrite vector dt ssimiltion Optiml Interpoltion BLUE 3d-Vritionl Method
Dt Assimiltion Aln O Neill Dt Assimiltion Reserch Centre University of Reding Contents Motivtion Univrite sclr dt ssimiltion Multivrite vector dt ssimiltion Optiml Interpoltion BLUE 3d-Vritionl Method
MATH 144: Business Calculus Final Review
 MATH 144: Business Clculus Finl Review 1 Skills 1. Clculte severl limits. 2. Find verticl nd horizontl symptotes for given rtionl function. 3. Clculte derivtive by definition. 4. Clculte severl derivtives
MATH 144: Business Clculus Finl Review 1 Skills 1. Clculte severl limits. 2. Find verticl nd horizontl symptotes for given rtionl function. 3. Clculte derivtive by definition. 4. Clculte severl derivtives
LINEAR ALGEBRA APPLIED
 5.5 Applictions of Inner Product Spces 5.5 Applictions of Inner Product Spces 7 Find the cross product of two vectors in R. Find the liner or qudrtic lest squres pproimtion of function. Find the nth-order
5.5 Applictions of Inner Product Spces 5.5 Applictions of Inner Product Spces 7 Find the cross product of two vectors in R. Find the liner or qudrtic lest squres pproimtion of function. Find the nth-order
Uses of transformations. 3D transformations. Review of vectors. Vectors in 3D. Points vs. vectors. Homogeneous coordinates S S [ H [ S \ H \ S ] H ]
![Uses of transformations. 3D transformations. Review of vectors. Vectors in 3D. Points vs. vectors. Homogeneous coordinates S S [ H [ S \ H \ S ] H ]](/thumbs/92/109192837.jpg "Uses of transformations. 3D transformations. Review of vectors. Vectors in 3D. Points vs. vectors. Homogeneous coordinates S S [ H [ S \ H \ S ] H ]") Uses of trnsformtions 3D trnsformtions Modeling: position nd resize prts of complex model; Viewing: define nd position the virtul cmer Animtion: define how objects move/chnge with time y y Sclr (dot) product
Uses of trnsformtions 3D trnsformtions Modeling: position nd resize prts of complex model; Viewing: define nd position the virtul cmer Animtion: define how objects move/chnge with time y y Sclr (dot) product
Review of Calculus, cont d
 Jim Lmbers MAT 460 Fll Semester 2009-10 Lecture 3 Notes These notes correspond to Section 1.1 in the text. Review of Clculus, cont d Riemnn Sums nd the Definite Integrl There re mny cses in which some
Jim Lmbers MAT 460 Fll Semester 2009-10 Lecture 3 Notes These notes correspond to Section 1.1 in the text. Review of Clculus, cont d Riemnn Sums nd the Definite Integrl There re mny cses in which some
Lecture Note 9: Orthogonal Reduction
 MATH : Computtionl Methods of Liner Algebr 1 The Row Echelon Form Lecture Note 9: Orthogonl Reduction Our trget is to solve the norml eution: Xinyi Zeng Deprtment of Mthemticl Sciences, UTEP A t Ax = A
MATH : Computtionl Methods of Liner Algebr 1 The Row Echelon Form Lecture Note 9: Orthogonl Reduction Our trget is to solve the norml eution: Xinyi Zeng Deprtment of Mthemticl Sciences, UTEP A t Ax = A
THREE-DIMENSIONAL KINEMATICS OF RIGID BODIES
 THREE-DIMENSIONAL KINEMATICS OF RIGID BODIES 1. TRANSLATION Figure shows rigid body trnslting in three-dimensionl spce. Any two points in the body, such s A nd B, will move long prllel stright lines if
THREE-DIMENSIONAL KINEMATICS OF RIGID BODIES 1. TRANSLATION Figure shows rigid body trnslting in three-dimensionl spce. Any two points in the body, such s A nd B, will move long prllel stright lines if
A new algorithm for generating Pythagorean triples 1
 A new lgorithm for generting Pythgoren triples 1 RH Dye 2 nd RWD Nicklls 3 The Mthemticl Gzette (1998; 82 (Mrch, No. 493, pp. 86 91 http://www.nicklls.org/dick/ppers/mths/pythgtriples1998.pdf 1 Introduction
A new lgorithm for generting Pythgoren triples 1 RH Dye 2 nd RWD Nicklls 3 The Mthemticl Gzette (1998; 82 (Mrch, No. 493, pp. 86 91 http://www.nicklls.org/dick/ppers/mths/pythgtriples1998.pdf 1 Introduction
Review of Gaussian Quadrature method
 Review of Gussin Qudrture method Nsser M. Asi Spring 006 compiled on Sundy Decemer 1, 017 t 09:1 PM 1 The prolem To find numericl vlue for the integrl of rel vlued function of rel vrile over specific rnge
Review of Gussin Qudrture method Nsser M. Asi Spring 006 compiled on Sundy Decemer 1, 017 t 09:1 PM 1 The prolem To find numericl vlue for the integrl of rel vlued function of rel vrile over specific rnge
Operations with Polynomials
 38 Chpter P Prerequisites P.4 Opertions with Polynomils Wht you should lern: How to identify the leding coefficients nd degrees of polynomils How to dd nd subtrct polynomils How to multiply polynomils
38 Chpter P Prerequisites P.4 Opertions with Polynomils Wht you should lern: How to identify the leding coefficients nd degrees of polynomils How to dd nd subtrct polynomils How to multiply polynomils
CS S-12 Turing Machine Modifications 1. When we added a stack to NFA to get a PDA, we increased computational power
 CS411-2015S-12 Turing Mchine Modifictions 1 12-0: Extending Turing Mchines When we dded stck to NFA to get PDA, we incresed computtionl power Cn we do the sme thing for Turing Mchines? Tht is, cn we dd
CS411-2015S-12 Turing Mchine Modifictions 1 12-0: Extending Turing Mchines When we dded stck to NFA to get PDA, we incresed computtionl power Cn we do the sme thing for Turing Mchines? Tht is, cn we dd
Fig. 1. Open-Loop and Closed-Loop Systems with Plant Variations
 ME 3600 Control ystems Chrcteristics of Open-Loop nd Closed-Loop ystems Importnt Control ystem Chrcteristics o ensitivity of system response to prmetric vritions cn be reduced o rnsient nd stedy-stte responses
ME 3600 Control ystems Chrcteristics of Open-Loop nd Closed-Loop ystems Importnt Control ystem Chrcteristics o ensitivity of system response to prmetric vritions cn be reduced o rnsient nd stedy-stte responses
SECTION 9-4 Translation of Axes
 9-4 Trnsltion of Aes 639 Rdiotelescope For the receiving ntenn shown in the figure, the common focus F is locted 120 feet bove the verte of the prbol, nd focus F (for the hperbol) is 20 feet bove the verte.
9-4 Trnsltion of Aes 639 Rdiotelescope For the receiving ntenn shown in the figure, the common focus F is locted 120 feet bove the verte of the prbol, nd focus F (for the hperbol) is 20 feet bove the verte.
Pavel Rytí. November 22, 2011 Discrete Math Seminar - Simon Fraser University
 Geometric representtions of liner codes Pvel Rytí Deprtment of Applied Mthemtics Chrles University in Prgue Advisor: Mrtin Loebl November, 011 Discrete Mth Seminr - Simon Frser University Bckground Liner
Geometric representtions of liner codes Pvel Rytí Deprtment of Applied Mthemtics Chrles University in Prgue Advisor: Mrtin Loebl November, 011 Discrete Mth Seminr - Simon Frser University Bckground Liner
Solution for Assignment 1 : Intro to Probability and Statistics, PAC learning
 Solution for Assignment 1 : Intro to Probbility nd Sttistics, PAC lerning 10-701/15-781: Mchine Lerning (Fll 004) Due: Sept. 30th 004, Thursdy, Strt of clss Question 1. Bsic Probbility ( 18 pts) 1.1 (
Solution for Assignment 1 : Intro to Probbility nd Sttistics, PAC lerning 10-701/15-781: Mchine Lerning (Fll 004) Due: Sept. 30th 004, Thursdy, Strt of clss Question 1. Bsic Probbility ( 18 pts) 1.1 (
NAME: MR. WAIN FUNCTIONS
 NAME: M. WAIN FUNCTIONS evision o Solving Polnomil Equtions i one term in Emples Solve: 7 7 7 0 0 7 b.9 c 7 7 7 7 ii more thn one term in Method: Get the right hnd side to equl zero = 0 Eliminte ll denomintors
NAME: M. WAIN FUNCTIONS evision o Solving Polnomil Equtions i one term in Emples Solve: 7 7 7 0 0 7 b.9 c 7 7 7 7 ii more thn one term in Method: Get the right hnd side to equl zero = 0 Eliminte ll denomintors
Instructor: Marios M. Fyrillas HOMEWORK ASSIGNMENT ON INTERPOLATION
 AMAT 34 Numericl Methods Instructor: Mrios M. Fyrills Emil: m.fyrills@fit.c.cy Office Tel.: 34559/6 Et. 3 HOMEWORK ASSIGNMENT ON INTERPOATION QUESTION Using interpoltion by colloction-polynomil fit method
AMAT 34 Numericl Methods Instructor: Mrios M. Fyrills Emil: m.fyrills@fit.c.cy Office Tel.: 34559/6 Et. 3 HOMEWORK ASSIGNMENT ON INTERPOATION QUESTION Using interpoltion by colloction-polynomil fit method
PART 1 MULTIPLE CHOICE Circle the appropriate response to each of the questions below. Each question has a value of 1 point.
 PART MULTIPLE CHOICE Circle the pproprite response to ech of the questions below. Ech question hs vlue of point.. If in sequence the second level difference is constnt, thn the sequence is:. rithmetic
PART MULTIPLE CHOICE Circle the pproprite response to ech of the questions below. Ech question hs vlue of point.. If in sequence the second level difference is constnt, thn the sequence is:. rithmetic
Chapter 3 Solving Nonlinear Equations
 Chpter 3 Solving Nonliner Equtions 3.1 Introduction The nonliner function of unknown vrible x is in the form of where n could be non-integer. Root is the numericl vlue of x tht stisfies f ( x) 0. Grphiclly,
Chpter 3 Solving Nonliner Equtions 3.1 Introduction The nonliner function of unknown vrible x is in the form of where n could be non-integer. Root is the numericl vlue of x tht stisfies f ( x) 0. Grphiclly,
Chapters 4 & 5 Integrals & Applications
 Contents Chpters 4 & 5 Integrls & Applictions Motivtion to Chpters 4 & 5 2 Chpter 4 3 Ares nd Distnces 3. VIDEO - Ares Under Functions............................................ 3.2 VIDEO - Applictions
Contents Chpters 4 & 5 Integrls & Applictions Motivtion to Chpters 4 & 5 2 Chpter 4 3 Ares nd Distnces 3. VIDEO - Ares Under Functions............................................ 3.2 VIDEO - Applictions
Matrices and Determinants
 Nme Chpter 8 Mtrices nd Determinnts Section 8.1 Mtrices nd Systems of Equtions Objective: In this lesson you lerned how to use mtrices, Gussin elimintion, nd Guss-Jordn elimintion to solve systems of liner
Nme Chpter 8 Mtrices nd Determinnts Section 8.1 Mtrices nd Systems of Equtions Objective: In this lesson you lerned how to use mtrices, Gussin elimintion, nd Guss-Jordn elimintion to solve systems of liner
Chapter 10: Symmetrical Components and Unbalanced Faults, Part II
 Chpter : Symmetricl Components nd Unblnced Fults, Prt.4 Sequence Networks o Loded Genertor n the igure to the right is genertor supplying threephse lod with neutrl connected through impednce n to ground.
Chpter : Symmetricl Components nd Unblnced Fults, Prt.4 Sequence Networks o Loded Genertor n the igure to the right is genertor supplying threephse lod with neutrl connected through impednce n to ground.
Advanced Functions Page 1 of 3 Investigating Exponential Functions y= b x
 Advnced Functions Pge of Investigting Eponentil Functions = b Emple : Write n Eqution to Fit Dt Write n eqution to fit the dt in the tble of vlues. 0 4 4 Properties of the Eponentil Function =b () The
Advnced Functions Pge of Investigting Eponentil Functions = b Emple : Write n Eqution to Fit Dt Write n eqution to fit the dt in the tble of vlues. 0 4 4 Properties of the Eponentil Function =b () The
Temperature influence compensation in microbolometer detector for image quality enhancement
 .26/qirt.26.68 Temperture influence compenstion in microolometer detector for imge qulity enhncement More info out this rticle: http://www.ndt.net/?id=2647 Astrct y M. Krupiński*, T. Sosnowski*, H. Mdur*
.26/qirt.26.68 Temperture influence compenstion in microolometer detector for imge qulity enhncement More info out this rticle: http://www.ndt.net/?id=2647 Astrct y M. Krupiński*, T. Sosnowski*, H. Mdur*
A-Level Mathematics Transition Task (compulsory for all maths students and all further maths student)
") A-Level Mthemtics Trnsition Tsk (compulsory for ll mths students nd ll further mths student) Due: st Lesson of the yer. Length: - hours work (depending on prior knowledge) This trnsition tsk provides revision
A-Level Mthemtics Trnsition Tsk (compulsory for ll mths students nd ll further mths student) Due: st Lesson of the yer. Length: - hours work (depending on prior knowledge) This trnsition tsk provides revision
The Velocity Factor of an Insulated Two-Wire Transmission Line
 The Velocity Fctor of n Insulted Two-Wire Trnsmission Line Problem Kirk T. McDonld Joseph Henry Lbortories, Princeton University, Princeton, NJ 08544 Mrch 7, 008 Estimte the velocity fctor F = v/c nd the
The Velocity Fctor of n Insulted Two-Wire Trnsmission Line Problem Kirk T. McDonld Joseph Henry Lbortories, Princeton University, Princeton, NJ 08544 Mrch 7, 008 Estimte the velocity fctor F = v/c nd the
CS667 Lecture 6: Monte Carlo Integration 02/10/05
 CS667 Lecture 6: Monte Crlo Integrtion 02/10/05 Venkt Krishnrj Lecturer: Steve Mrschner 1 Ide The min ide of Monte Crlo Integrtion is tht we cn estimte the vlue of n integrl by looking t lrge number of
CS667 Lecture 6: Monte Crlo Integrtion 02/10/05 Venkt Krishnrj Lecturer: Steve Mrschner 1 Ide The min ide of Monte Crlo Integrtion is tht we cn estimte the vlue of n integrl by looking t lrge number of
PHYS Summer Professor Caillault Homework Solutions. Chapter 2
 PHYS 1111 - Summer 2007 - Professor Cillult Homework Solutions Chpter 2 5. Picture the Problem: The runner moves long the ovl trck. Strtegy: The distnce is the totl length of trvel, nd the displcement
PHYS 1111 - Summer 2007 - Professor Cillult Homework Solutions Chpter 2 5. Picture the Problem: The runner moves long the ovl trck. Strtegy: The distnce is the totl length of trvel, nd the displcement
Jim Lambers MAT 169 Fall Semester Lecture 4 Notes
 Jim Lmbers MAT 169 Fll Semester 2009-10 Lecture 4 Notes These notes correspond to Section 8.2 in the text. Series Wht is Series? An infinte series, usully referred to simply s series, is n sum of ll of
Jim Lmbers MAT 169 Fll Semester 2009-10 Lecture 4 Notes These notes correspond to Section 8.2 in the text. Series Wht is Series? An infinte series, usully referred to simply s series, is n sum of ll of
U NIVERSITY OF I LLINOIS
 D EPARTMENT OF M ATHEMATICS U NIVERSITY OF I LLINOIS AT U RBANA-CHAMPAIGN NetMt Online Mt Courses, University of Illinois Course Syllbus for MATH 220 (Clculus I) Course description: A first course in clculus
D EPARTMENT OF M ATHEMATICS U NIVERSITY OF I LLINOIS AT U RBANA-CHAMPAIGN NetMt Online Mt Courses, University of Illinois Course Syllbus for MATH 220 (Clculus I) Course description: A first course in clculus
13.4 Work done by Constant Forces
 13.4 Work done by Constnt Forces We will begin our discussion of the concept of work by nlyzing the motion of n object in one dimension cted on by constnt forces. Let s consider the following exmple: push
13.4 Work done by Constnt Forces We will begin our discussion of the concept of work by nlyzing the motion of n object in one dimension cted on by constnt forces. Let s consider the following exmple: push
Connected-components. Summary of lecture 9. Algorithms and Data Structures Disjoint sets. Example: connected components in graphs
 Prm University, Mth. Deprtment Summry of lecture 9 Algorithms nd Dt Structures Disjoint sets Summry of this lecture: (CLR.1-3) Dt Structures for Disjoint sets: Union opertion Find opertion Mrco Pellegrini
Prm University, Mth. Deprtment Summry of lecture 9 Algorithms nd Dt Structures Disjoint sets Summry of this lecture: (CLR.1-3) Dt Structures for Disjoint sets: Union opertion Find opertion Mrco Pellegrini
Hidden Markov Models
 Hidden Mrkov Models Huptseminr Mchine Lerning 18.11.2003 Referent: Nikols Dörfler 1 Overview Mrkov Models Hidden Mrkov Models Types of Hidden Mrkov Models Applictions using HMMs Three centrl problems:
Hidden Mrkov Models Huptseminr Mchine Lerning 18.11.2003 Referent: Nikols Dörfler 1 Overview Mrkov Models Hidden Mrkov Models Types of Hidden Mrkov Models Applictions using HMMs Three centrl problems:
Optimization Lecture 1 Review of Differential Calculus for Functions of Single Variable.
 Optimiztion Lecture 1 Review of Differentil Clculus for Functions of Single Vrible http://users.encs.concordi.c/~luisrod, Jnury 14 Outline Optimiztion Problems Rel Numbers nd Rel Vectors Open, Closed nd
Optimiztion Lecture 1 Review of Differentil Clculus for Functions of Single Vrible http://users.encs.concordi.c/~luisrod, Jnury 14 Outline Optimiztion Problems Rel Numbers nd Rel Vectors Open, Closed nd
Review Exercises for Chapter 4
 _R.qd // : PM Pge CHAPTER Integrtion Review Eercises for Chpter In Eercises nd, use the grph of to sketch grph of f. To print n enlrged cop of the grph, go to the wesite www.mthgrphs.com... In Eercises
_R.qd // : PM Pge CHAPTER Integrtion Review Eercises for Chpter In Eercises nd, use the grph of to sketch grph of f. To print n enlrged cop of the grph, go to the wesite www.mthgrphs.com... In Eercises
1. Extend QR downwards to meet the x-axis at U(6, 0). y
. y") In the digrm, two stright lines re to be drwn through so tht the lines divide the figure OPQRST into pieces of equl re Find the sum of the slopes of the lines R(6, ) S(, ) T(, 0) Determine ll liner functions
In the digrm, two stright lines re to be drwn through so tht the lines divide the figure OPQRST into pieces of equl re Find the sum of the slopes of the lines R(6, ) S(, ) T(, 0) Determine ll liner functions
Continuous Random Variables
 STAT/MATH 395 A - PROBABILITY II UW Winter Qurter 217 Néhémy Lim Continuous Rndom Vribles Nottion. The indictor function of set S is rel-vlued function defined by : { 1 if x S 1 S (x) if x S Suppose tht
STAT/MATH 395 A - PROBABILITY II UW Winter Qurter 217 Néhémy Lim Continuous Rndom Vribles Nottion. The indictor function of set S is rel-vlued function defined by : { 1 if x S 1 S (x) if x S Suppose tht
MATH 122B AND 125 FINAL EXAM REVIEW PACKET (Fall 2014)
") MATH B AND FINAL EXAM REVIEW PACKET (Fll 4) The following questions cn be used s review for Mth B nd. These questions re not ctul smples of questions tht will pper on the finl em, but they will provide
MATH B AND FINAL EXAM REVIEW PACKET (Fll 4) The following questions cn be used s review for Mth B nd. These questions re not ctul smples of questions tht will pper on the finl em, but they will provide
Things to Memorize: A Partial List. January 27, 2017
 Things to Memorize: A Prtil List Jnury 27, 2017 Chpter 2 Vectors - Bsic Fcts A vector hs mgnitude (lso clled size/length/norm) nd direction. It does not hve fixed position, so the sme vector cn e moved
Things to Memorize: A Prtil List Jnury 27, 2017 Chpter 2 Vectors - Bsic Fcts A vector hs mgnitude (lso clled size/length/norm) nd direction. It does not hve fixed position, so the sme vector cn e moved
Chapter 3 Exponential and Logarithmic Functions Section 3.1
 Chpter 3 Eponentil nd Logrithmic Functions Section 3. EXPONENTIAL FUNCTIONS AND THEIR GRAPHS Eponentil Functions Eponentil functions re non-lgebric functions. The re clled trnscendentl functions. The eponentil
Chpter 3 Eponentil nd Logrithmic Functions Section 3. EXPONENTIAL FUNCTIONS AND THEIR GRAPHS Eponentil Functions Eponentil functions re non-lgebric functions. The re clled trnscendentl functions. The eponentil
CMDA 4604: Intermediate Topics in Mathematical Modeling Lecture 19: Interpolation and Quadrature
 CMDA 4604: Intermedite Topics in Mthemticl Modeling Lecture 19: Interpoltion nd Qudrture In this lecture we mke brief diversion into the res of interpoltion nd qudrture. Given function f C[, b], we sy
CMDA 4604: Intermedite Topics in Mthemticl Modeling Lecture 19: Interpoltion nd Qudrture In this lecture we mke brief diversion into the res of interpoltion nd qudrture. Given function f C[, b], we sy
Actor-Critic. Hung-yi Lee
 Actor-Critic Hung-yi Lee Asynchronous Advntge Actor-Critic (A3C) Volodymyr Mnih, Adrià Puigdomènech Bdi, Mehdi Mirz, Alex Grves, Timothy P. Lillicrp, Tim Hrley, Dvid Silver, Kory Kvukcuoglu, Asynchronous
Actor-Critic Hung-yi Lee Asynchronous Advntge Actor-Critic (A3C) Volodymyr Mnih, Adrià Puigdomènech Bdi, Mehdi Mirz, Alex Grves, Timothy P. Lillicrp, Tim Hrley, Dvid Silver, Kory Kvukcuoglu, Asynchronous
Math 259 Winter Solutions to Homework #9
 Mth 59 Winter 9 Solutions to Homework #9 Prolems from Pges 658-659 (Section.8). Given f(, y, z) = + y + z nd the constrint g(, y, z) = + y + z =, the three equtions tht we get y setting up the Lgrnge multiplier
Mth 59 Winter 9 Solutions to Homework #9 Prolems from Pges 658-659 (Section.8). Given f(, y, z) = + y + z nd the constrint g(, y, z) = + y + z =, the three equtions tht we get y setting up the Lgrnge multiplier
The Trapezoidal Rule
 _.qd // : PM Pge 9 SECTION. Numericl Integrtion 9 f Section. The re of the region cn e pproimted using four trpezoids. Figure. = f( ) f( ) n The re of the first trpezoid is f f n. Figure. = Numericl Integrtion
_.qd // : PM Pge 9 SECTION. Numericl Integrtion 9 f Section. The re of the region cn e pproimted using four trpezoids. Figure. = f( ) f( ) n The re of the first trpezoid is f f n. Figure. = Numericl Integrtion
4.4 Areas, Integrals and Antiderivatives
 . res, integrls nd ntiderivtives 333. Ares, Integrls nd Antiderivtives This section explores properties of functions defined s res nd exmines some connections mong res, integrls nd ntiderivtives. In order
. res, integrls nd ntiderivtives 333. Ares, Integrls nd Antiderivtives This section explores properties of functions defined s res nd exmines some connections mong res, integrls nd ntiderivtives. In order
First, we will find the components of the force of gravity: Perpendicular Forces (using away from the ramp as positive) ma F
 ma F") 1.. In Clss or Homework Eercise 1. An 18.0 kg bo is relesed on 33.0 o incline nd ccelertes t 0.300 m/s. Wht is the coeicient o riction? m 18.0kg 33.0? 0 0.300 m / s irst, we will ind the components o the
1.. In Clss or Homework Eercise 1. An 18.0 kg bo is relesed on 33.0 o incline nd ccelertes t 0.300 m/s. Wht is the coeicient o riction? m 18.0kg 33.0? 0 0.300 m / s irst, we will ind the components o the
Math 520 Final Exam Topic Outline Sections 1 3 (Xiao/Dumas/Liaw) Spring 2008
 Spring 2008") Mth 520 Finl Exm Topic Outline Sections 1 3 (Xio/Dums/Liw) Spring 2008 The finl exm will be held on Tuesdy, My 13, 2-5pm in 117 McMilln Wht will be covered The finl exm will cover the mteril from ll of
Mth 520 Finl Exm Topic Outline Sections 1 3 (Xio/Dums/Liw) Spring 2008 The finl exm will be held on Tuesdy, My 13, 2-5pm in 117 McMilln Wht will be covered The finl exm will cover the mteril from ll of
fractions Let s Learn to
 5 simple lgebric frctions corne lens pupil retin Norml vision light focused on the retin concve lens Shortsightedness (myopi) light focused in front of the retin Corrected myopi light focused on the retin
5 simple lgebric frctions corne lens pupil retin Norml vision light focused on the retin concve lens Shortsightedness (myopi) light focused in front of the retin Corrected myopi light focused on the retin
New Expansion and Infinite Series
 Interntionl Mthemticl Forum, Vol. 9, 204, no. 22, 06-073 HIKARI Ltd, www.m-hikri.com http://dx.doi.org/0.2988/imf.204.4502 New Expnsion nd Infinite Series Diyun Zhng College of Computer Nnjing University
Interntionl Mthemticl Forum, Vol. 9, 204, no. 22, 06-073 HIKARI Ltd, www.m-hikri.com http://dx.doi.org/0.2988/imf.204.4502 New Expnsion nd Infinite Series Diyun Zhng College of Computer Nnjing University
Jack Simons, Henry Eyring Scientist and Professor Chemistry Department University of Utah
 1. Born-Oppenheimer pprox.- energy surfces 2. Men-field (Hrtree-Fock) theory- orbitls 3. Pros nd cons of HF- RHF, UHF 4. Beyond HF- why? 5. First, one usully does HF-how? 6. Bsis sets nd nottions 7. MPn,
1. Born-Oppenheimer pprox.- energy surfces 2. Men-field (Hrtree-Fock) theory- orbitls 3. Pros nd cons of HF- RHF, UHF 4. Beyond HF- why? 5. First, one usully does HF-how? 6. Bsis sets nd nottions 7. MPn,
Lecture 19: Continuous Least Squares Approximation
 Lecture 19: Continuous Lest Squres Approximtion 33 Continuous lest squres pproximtion We begn 31 with the problem of pproximting some f C[, b] with polynomil p P n t the discrete points x, x 1,, x m for
Lecture 19: Continuous Lest Squres Approximtion 33 Continuous lest squres pproximtion We begn 31 with the problem of pproximting some f C[, b] with polynomil p P n t the discrete points x, x 1,, x m for
Final Exam - Review MATH Spring 2017
 Finl Exm - Review MATH 5 - Spring 7 Chpter, 3, nd Sections 5.-5.5, 5.7 Finl Exm: Tuesdy 5/9, :3-7:pm The following is list of importnt concepts from the sections which were not covered by Midterm Exm or.
Finl Exm - Review MATH 5 - Spring 7 Chpter, 3, nd Sections 5.-5.5, 5.7 Finl Exm: Tuesdy 5/9, :3-7:pm The following is list of importnt concepts from the sections which were not covered by Midterm Exm or.
Calculus - Activity 1 Rate of change of a function at a point.
 Nme: Clss: p 77 Mths Helper Plus Resource Set. Copright 00 Bruce A. Vughn, Techers Choice Softwre Clculus - Activit Rte of chnge of function t point. ) Strt Mths Helper Plus, then lod the file: Clculus
Nme: Clss: p 77 Mths Helper Plus Resource Set. Copright 00 Bruce A. Vughn, Techers Choice Softwre Clculus - Activit Rte of chnge of function t point. ) Strt Mths Helper Plus, then lod the file: Clculus
Ordinary Differential Equations- Boundary Value Problem
 Ordinry Differentil Equtions- Boundry Vlue Problem Shooting method Runge Kutt method Computer-bsed solutions o BVPFD subroutine (Fortrn IMSL subroutine tht Solves (prmeterized) system of differentil equtions
Ordinry Differentil Equtions- Boundry Vlue Problem Shooting method Runge Kutt method Computer-bsed solutions o BVPFD subroutine (Fortrn IMSL subroutine tht Solves (prmeterized) system of differentil equtions
On Second Derivative-Free Zero Finding Methods
 010 Americn Control Conerence Mrriott Wterront, Bltimore, MD, USA June 30-July 0, 010 FrC07.4 On Second Derivtive-Free Zero Finding Methods Mohmmed A. Hsn Deprtment o Electricl & Computer Engineering University
010 Americn Control Conerence Mrriott Wterront, Bltimore, MD, USA June 30-July 0, 010 FrC07.4 On Second Derivtive-Free Zero Finding Methods Mohmmed A. Hsn Deprtment o Electricl & Computer Engineering University
CAAM 453 NUMERICAL ANALYSIS I Examination There are four questions, plus a bonus. Do not look at them until you begin the exam.
 Exmintion 1 Posted 23 October 2002. Due no lter thn 5pm on Mondy, 28 October 2002. Instructions: 1. Time limit: 3 uninterrupted hours. 2. There re four questions, plus bonus. Do not look t them until you
Exmintion 1 Posted 23 October 2002. Due no lter thn 5pm on Mondy, 28 October 2002. Instructions: 1. Time limit: 3 uninterrupted hours. 2. There re four questions, plus bonus. Do not look t them until you
ICP Algorithm for Alignment of Stars from Astronomical Photographic Images
 Interntionl Conference on Computer Systems nd echnologies - CompSysech 010 ICP Algorithm for Alignment of Strs from Astronomicl Photogrphic Imges Alexnder Mrinov, Ndezhd Zltev Abstrct: his rticle proposes
Interntionl Conference on Computer Systems nd echnologies - CompSysech 010 ICP Algorithm for Alignment of Strs from Astronomicl Photogrphic Imges Alexnder Mrinov, Ndezhd Zltev Abstrct: his rticle proposes
3.1 Exponential Functions and Their Graphs
 . Eponentil Functions nd Their Grphs Sllbus Objective: 9. The student will sketch the grph of eponentil, logistic, or logrithmic function. 9. The student will evlute eponentil or logrithmic epressions.
. Eponentil Functions nd Their Grphs Sllbus Objective: 9. The student will sketch the grph of eponentil, logistic, or logrithmic function. 9. The student will evlute eponentil or logrithmic epressions.
Properties of Integrals, Indefinite Integrals. Goals: Definition of the Definite Integral Integral Calculations using Antiderivatives
 Block #6: Properties of Integrls, Indefinite Integrls Gols: Definition of the Definite Integrl Integrl Clcultions using Antiderivtives Properties of Integrls The Indefinite Integrl 1 Riemnn Sums - 1 Riemnn
Block #6: Properties of Integrls, Indefinite Integrls Gols: Definition of the Definite Integrl Integrl Clcultions using Antiderivtives Properties of Integrls The Indefinite Integrl 1 Riemnn Sums - 1 Riemnn
B.Sc. in Mathematics (Ordinary)
") R48/0 DUBLIN INSTITUTE OF TECHNOLOGY KEVIN STREET, DUBLIN 8 B.Sc. in Mthemtics (Ordinry) SUPPLEMENTAL EXAMINATIONS 01 Numericl Methods Dr. D. Mckey Dr. C. Hills Dr. E.A. Cox Full mrks for complete nswers
R48/0 DUBLIN INSTITUTE OF TECHNOLOGY KEVIN STREET, DUBLIN 8 B.Sc. in Mthemtics (Ordinry) SUPPLEMENTAL EXAMINATIONS 01 Numericl Methods Dr. D. Mckey Dr. C. Hills Dr. E.A. Cox Full mrks for complete nswers
Pre-AP Geometry Worksheet 5.2: Similar Right Triangles
 ! re-a Geometr Worksheet 5.2: Similr Right Tringles Nme: te: eriod: Solve. Show ll work. Leve nswers s simplified rdicls on #1-5. For #6, round to the nerer tenth. 12!! 6! 1) =! 8! 6! 2) = 18! 8! w!+!9!
! re-a Geometr Worksheet 5.2: Similr Right Tringles Nme: te: eriod: Solve. Show ll work. Leve nswers s simplified rdicls on #1-5. For #6, round to the nerer tenth. 12!! 6! 1) =! 8! 6! 2) = 18! 8! w!+!9!
Math 61CM - Solutions to homework 9
 Mth 61CM - Solutions to homework 9 Cédric De Groote November 30 th, 2018 Problem 1: Recll tht the left limit of function f t point c is defined s follows: lim f(x) = l x c if for ny > 0 there exists δ
Mth 61CM - Solutions to homework 9 Cédric De Groote November 30 th, 2018 Problem 1: Recll tht the left limit of function f t point c is defined s follows: lim f(x) = l x c if for ny > 0 there exists δ
Numerical Integration. 1 Introduction. 2 Midpoint Rule, Trapezoid Rule, Simpson Rule. AMSC/CMSC 460/466 T. von Petersdorff 1
 AMSC/CMSC 46/466 T. von Petersdorff 1 umericl Integrtion 1 Introduction We wnt to pproximte the integrl I := f xdx where we re given, b nd the function f s subroutine. We evlute f t points x 1,...,x n
AMSC/CMSC 46/466 T. von Petersdorff 1 umericl Integrtion 1 Introduction We wnt to pproximte the integrl I := f xdx where we re given, b nd the function f s subroutine. We evlute f t points x 1,...,x n
Synthesizing Geometries for 21st Century Electromagnetics
 ECE 5322 21 st Century Electromgnetics Instructor: Office: Phone: E Mil: Dr. Rymond C. Rumpf A 337 (915) 747 6958 rcrumpf@utep.edu Lecture #18 Synthesizing Geometries for 21st Century Electromgnetics Synthesis
ECE 5322 21 st Century Electromgnetics Instructor: Office: Phone: E Mil: Dr. Rymond C. Rumpf A 337 (915) 747 6958 rcrumpf@utep.edu Lecture #18 Synthesizing Geometries for 21st Century Electromgnetics Synthesis
Unit 1 Exponentials and Logarithms
 HARTFIELD PRECALCULUS UNIT 1 NOTES PAGE 1 Unit 1 Eponentils nd Logrithms (2) Eponentil Functions (3) The number e (4) Logrithms (5) Specil Logrithms (7) Chnge of Bse Formul (8) Logrithmic Functions (10)
HARTFIELD PRECALCULUS UNIT 1 NOTES PAGE 1 Unit 1 Eponentils nd Logrithms (2) Eponentil Functions (3) The number e (4) Logrithms (5) Specil Logrithms (7) Chnge of Bse Formul (8) Logrithmic Functions (10)
Non-Linear & Logistic Regression
 Non-Liner & Logistic Regression If the sttistics re boring, then you've got the wrong numbers. Edwrd R. Tufte (Sttistics Professor, Yle University) Regression Anlyses When do we use these? PART 1: find
Non-Liner & Logistic Regression If the sttistics re boring, then you've got the wrong numbers. Edwrd R. Tufte (Sttistics Professor, Yle University) Regression Anlyses When do we use these? PART 1: find
Orthogonal Polynomials
 Mth 4401 Gussin Qudrture Pge 1 Orthogonl Polynomils Orthogonl polynomils rise from series solutions to differentil equtions, lthough they cn be rrived t in vriety of different mnners. Orthogonl polynomils
Mth 4401 Gussin Qudrture Pge 1 Orthogonl Polynomils Orthogonl polynomils rise from series solutions to differentil equtions, lthough they cn be rrived t in vriety of different mnners. Orthogonl polynomils
Geometrical Transformations
 Geometricl Trnsformtions Did Atkinson D.Atkinson@cl.c.k Compttionl Aspects of MRI References Fole, n Dm, Feiner, Hghes. Compter Grphics: Principles nd Prctice. Chpter 5. Wolfrm MthWorld http://mthworld.wolfrm.com/
Geometricl Trnsformtions Did Atkinson D.Atkinson@cl.c.k Compttionl Aspects of MRI References Fole, n Dm, Feiner, Hghes. Compter Grphics: Principles nd Prctice. Chpter 5. Wolfrm MthWorld http://mthworld.wolfrm.com/
y = f(x) This means that there must be a point, c, where the Figure 1
 This means that there must be a point, c, where the Figure 1") Clculus Investigtion A Men Slope TEACHER S Prt 1: Understnding the Men Vlue Theorem The Men Vlue Theorem for differentition sttes tht if f() is defined nd continuous over the intervl [, ], nd differentile
Clculus Investigtion A Men Slope TEACHER S Prt 1: Understnding the Men Vlue Theorem The Men Vlue Theorem for differentition sttes tht if f() is defined nd continuous over the intervl [, ], nd differentile
Chapter 3 Polynomials
 Dr M DRAIEF As described in the introduction of Chpter 1, pplictions of solving liner equtions rise in number of different settings In prticulr, we will in this chpter focus on the problem of modelling
Dr M DRAIEF As described in the introduction of Chpter 1, pplictions of solving liner equtions rise in number of different settings In prticulr, we will in this chpter focus on the problem of modelling
THE EXISTENCE-UNIQUENESS THEOREM FOR FIRST-ORDER DIFFERENTIAL EQUATIONS.
 THE EXISTENCE-UNIQUENESS THEOREM FOR FIRST-ORDER DIFFERENTIAL EQUATIONS RADON ROSBOROUGH https://intuitiveexplntionscom/picrd-lindelof-theorem/ This document is proof of the existence-uniqueness theorem
THE EXISTENCE-UNIQUENESS THEOREM FOR FIRST-ORDER DIFFERENTIAL EQUATIONS RADON ROSBOROUGH https://intuitiveexplntionscom/picrd-lindelof-theorem/ This document is proof of the existence-uniqueness theorem
CHAPTER 6b. NUMERICAL INTERPOLATION
 CHAPTER 6. NUMERICAL INTERPOLATION A. J. Clrk School o Engineering Deprtment o Civil nd Environmentl Engineering y Dr. Irhim A. Asskk Spring ENCE - Computtion s in Civil Engineering II Deprtment o Civil
CHAPTER 6. NUMERICAL INTERPOLATION A. J. Clrk School o Engineering Deprtment o Civil nd Environmentl Engineering y Dr. Irhim A. Asskk Spring ENCE - Computtion s in Civil Engineering II Deprtment o Civil
10.2 The Ellipse and the Hyperbola
 CHAPTER 0 Conic Sections Solve. 97. Two surveors need to find the distnce cross lke. The plce reference pole t point A in the digrm. Point B is meters est nd meter north of the reference point A. Point
CHAPTER 0 Conic Sections Solve. 97. Two surveors need to find the distnce cross lke. The plce reference pole t point A in the digrm. Point B is meters est nd meter north of the reference point A. Point
Duality # Second iteration for HW problem. Recall our LP example problem we have been working on, in equality form, is given below.
 Dulity #. Second itertion for HW problem Recll our LP emple problem we hve been working on, in equlity form, is given below.,,,, 8 m F which, when written in slightly different form, is 8 F Recll tht we
Dulity #. Second itertion for HW problem Recll our LP emple problem we hve been working on, in equlity form, is given below.,,,, 8 m F which, when written in slightly different form, is 8 F Recll tht we
Intensity transformations
 Intensity trnsformtions Stefno Ferrri Università degli Studi di Milno stefno.ferrri@unimi.it Methods for Imge Processing cdemic yer 2017 2018 Sptil domin The sptil domin of n imge is the plne tht contins
Intensity trnsformtions Stefno Ferrri Università degli Studi di Milno stefno.ferrri@unimi.it Methods for Imge Processing cdemic yer 2017 2018 Sptil domin The sptil domin of n imge is the plne tht contins
Lecture Solution of a System of Linear Equation
 ChE Lecture Notes, Dept. of Chemicl Engineering, Univ. of TN, Knoville - D. Keffer, 5/9/98 (updted /) Lecture 8- - Solution of System of Liner Eqution 8. Why is it importnt to e le to solve system of liner
ChE Lecture Notes, Dept. of Chemicl Engineering, Univ. of TN, Knoville - D. Keffer, 5/9/98 (updted /) Lecture 8- - Solution of System of Liner Eqution 8. Why is it importnt to e le to solve system of liner