Lecture 8 Wrap-up Part1, Matlab
|
|
|
- Kelley Booth
- 6 years ago
- Views:
Transcription
1 Lecture 8 Wrp-up Prt1, Mtlb
2 Homework Polic Plese stple our homework (ou will lose 10% credit if not stpled or secured) Submit ll problems in order. This mens to plce ever item relting to problem 3 (our writeup, code, figures, etc.) before nthing relting to problem 4. Preferred order would be writeup, then figures (if seprte), nd finll code, but we won't be pick bout this. The sme philosoph pplies to multi-prt questions. Submit ll prts of 3() before n prts of 3(b). (We relize there will be situtions is which, for emple, ou write code which is used in severl problems. In this cse, plce the code in the section of the first problem in which it is used.)
3 Spots nd Oriented Brs (Mlik nd Peron)

4

5
6 Gbor Filters Gbor filters t different scles nd sptil frequencies top row shows nti-smmetric (or odd) filters, bottom row the smmetric (or even) filters. cos( k k )ep 2σ 2 2
7 Gbor filters re emples of Wvelets We know two bses for imges: Piels re loclized in spce. Fourier re loclized in frequenc. Wvelets re little of both. Good for mesuring frequenc locll.

8 Snthesis with this Representtion (Bergen nd Heeger)
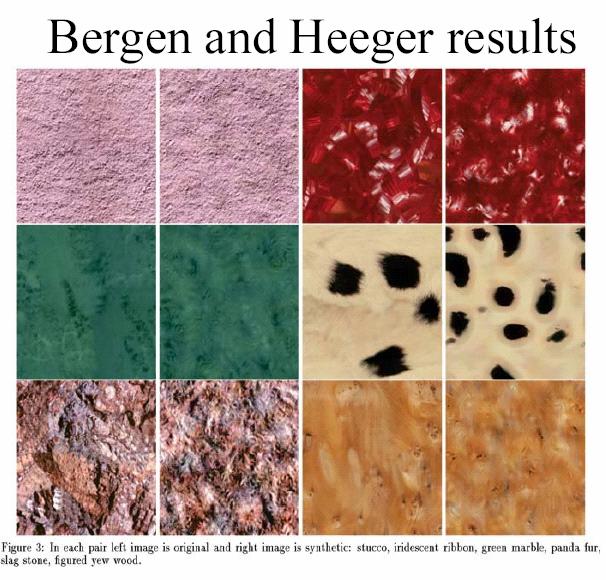
9
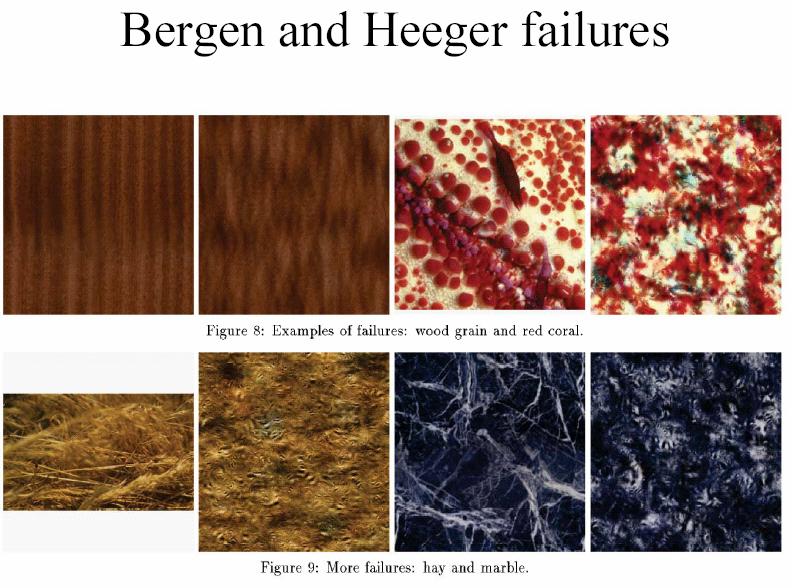
10
11 Mrkov Model Cptures locl dependencies. Ech piel depends on neighborhood. Emple, 1D first order model P(p1, p2, pn) = P(p1)*P(p2 p1)*p(p3 p2,p1)* = P(p1)*P(p2 p1)*p(p3 p2)*p(p4 p3)*
12 Emple 1 st Order Mrkov Model Ech piel is like neighbor to left + noise with some probbilit. Mtlb These cpture much wider rnge of phenomen.
13 Edge There re dependencies in Filter Outputs Filter responds t one scle, often does t other scles. Filter responds t one orienttion, often doesn t t orthogonl orienttion. Snthesis using wvelets nd Mrkov model for dependencies: DeBonet nd Viol Portill nd Simoncelli
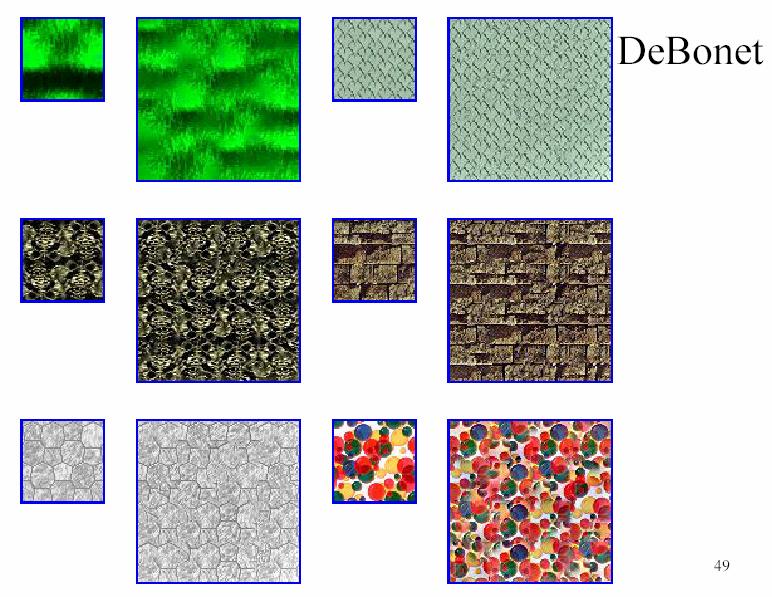
14
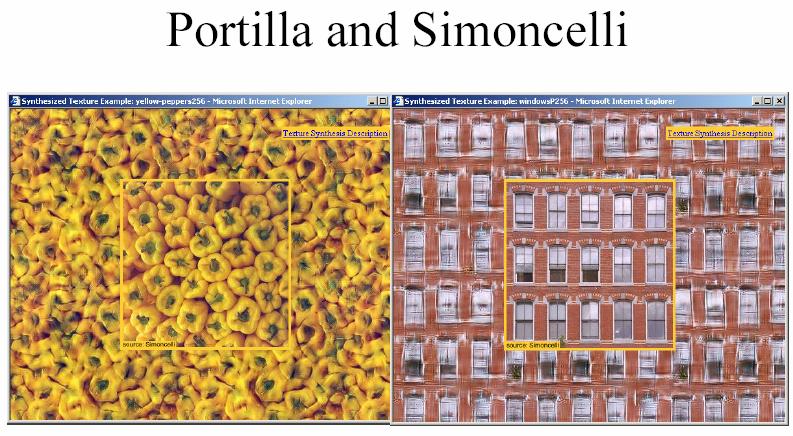
15
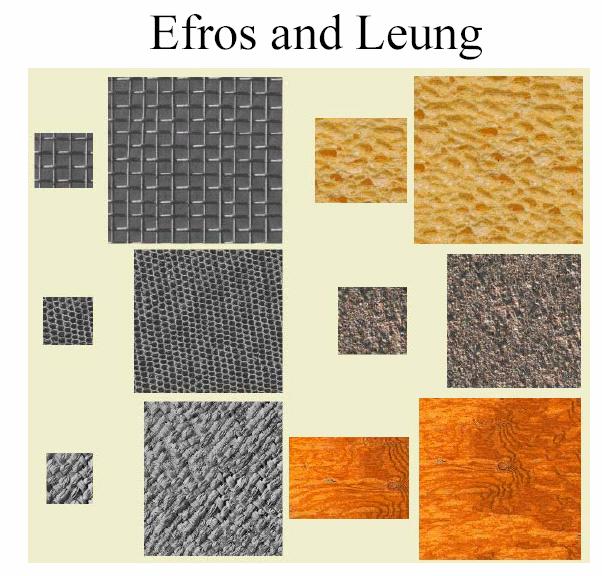
16 We cn do this without filters Ech piel depends on neighbors. 1. As ou snthesize, look t neighbors. 2. Look for similr neighborhood in smple teture. 3. Cop piel from tht neighborhood. 4. Continue.
17

18 This is like coping, but not just repetition Photo Pttern Repeted

19 With Blocks
20 Mtlb tutoril nd Liner Algebr Review Tod s gols: Lern enough mtlb to get strted. Review some bsics of Liner Algebr Essentil for geometr of points nd lines. But lso, ll mth is liner lgebr. (ok slight eggertion however most computtion is) Mn slides tod dpted from Octvi Cmps, Penn Stte.
21 Strting Mtlb For PCs, Mtlb should be progrm. For Sun s: Numericl Anlsis nd Visuliztion Mtlb 6.1
22 Help help helpcommnd Eg., help plus Help on toolbr demo Tutoril:
23 Mtlb interpreter Mn common functions: see help ops
24 Ordered set of numbers: (1,2,3,4) Emple: (,,z) coordintes of pt in spce. Vectors v = v = ( 1, n i= 1, K, 2 If v = 1, v is i 2 n ) unit vector
25 Indeing into vectors
26 Vector Addition v + w = ( 1, 2) + ( 1, 2) = ( 1 + 1, 2 + 2) v V+w w
27 Product of sclr nd vector v = ( 1, 2) = ( 1, 2) v v
28 Opertions on vectors sum m, min, men, sort, Pointwise:.^
29 Inner (dot) Product v α w v. w = ( + 1, 2).( 1, 2) = The inner product is SCALAR! v. w = 2 ( 1, 2).( 1, ) = v w cosα v. w = 0 v w
30 Mtrices A n m = M n M n2 L L L O L 1m 2m 3m M nm Sum: C n m = An m + Bn m c = + ij ij A nd B must hve the sme dimensions b ij
31 Mtrices Product: C n p = An mbm p m c ij = k = 1 ik b kj A nd B must hve comptible dimensions A n nbn n Bn n An n Identit Mtri: 1 0 O O 0 I = IA = AI = O O O O 0 0 O 1 A
32 Mtrices Trnspose: T C m n = A n m c = ij ji ( T T A + B) = A + ( T T AB ) = B A T B T If A T = A A is smmetric
33 Mtrices Determinnt: Determinnt: A must be squre A must be squre det + = det = =
34 Mtrices Inverse: A must be squre 1 1 An n A n n = A n n An n = I =
35 Indeing into mtrices
36 Eucliden trnsformtions
37 2D Trnsltion P t P
38 2D Trnsltion Eqution t P t P P = (, ) t = ( t, t ) t P ' = ( + t, + t ) = P+ t
39 2D Trnsltion using Mtrices P t t P t ), ( ), ( t t = = t P = ' t t t t P t P
40 Scling P P
41 Scling Eqution P s. s. P s. s. ), ( ' ), ( s s = = P P P P '= s = s s s s 0 0 P' S P S P = '
42 Rottion P P
43 Rottion Equtions Counter-clockwise rottion b n ngle θ Y P X θ P ' ' cosθ = sinθ P'= R.P sinθ cosθ
44 Degrees of Freedom ' ' = R is 22 cosθ sinθ sinθ cosθ 4 elements BUT! There is onl 1 degree of freedom: θ The 4 elements must stisf the following constrints: R R T = R T R = I det( R) = 1
45 Stretching Eqution P S.. P S.. = s s s s 0 0 P' ), ( ' ), ( s s = = P P S P S P = '
46 Stretching = tilting nd projecting (with wek perspective) = = s s s s s s s P'
47 Liner Trnsformtion = = s s s s s d c b ϕ ϕ ϕ ϕ θ θ θ θ ϕ ϕ ϕ ϕ θ θ θ θ sin cos cos sin sin cos cos sin sin cos cos sin 0 0 sin cos cos sin P' SVD
48 Affine Trnsformtion P' c b d t t 1
49 Files
50 Functions Formt: function o = test(,) Nme function nd file the sme. Onl first function in file is visible outside the file.
51 Imges
52 Debugging Add print sttements to function b leving off ; kebord debug nd brekpoint
53 Conclusions Quick tour of mtlb, ou should tech ourself the rest. We ll give hints in problem sets. Liner lgebr llows geometric mnipultion of points. Lern to love SVD.
CS434a/541a: Pattern Recognition Prof. Olga Veksler. Lecture 2
 CS434/54: Pttern Recognition Prof. Olg Veksler Lecture Outline Review of Liner Algebr vectors nd mtrices products nd norms vector spces nd liner trnsformtions eigenvlues nd eigenvectors Introduction to
CS434/54: Pttern Recognition Prof. Olg Veksler Lecture Outline Review of Liner Algebr vectors nd mtrices products nd norms vector spces nd liner trnsformtions eigenvlues nd eigenvectors Introduction to
Fundamentals of Linear Algebra
 -7/8-797 Mchine Lerning for Signl rocessing Fundmentls of Liner Alger Administrivi Registrtion: Anone on witlist still? Homework : Will e hnded out with clss Liner lger Clss - Sep Instructor: Bhiksh Rj
-7/8-797 Mchine Lerning for Signl rocessing Fundmentls of Liner Alger Administrivi Registrtion: Anone on witlist still? Homework : Will e hnded out with clss Liner lger Clss - Sep Instructor: Bhiksh Rj
11-755/ Machine Learning for Signal Processing. Algebra. Class August Instructor: Bhiksha Raj
 -755/8-797 Mchine Lerning for Signl Processing Fundmentls of Liner Alger Clss 6 August 9 Instructor: Bhiksh Rj 6 Aug -755/8-797 Administrivi Registrtion: Anyone on witlist still? Our TA is here Sourish
-755/8-797 Mchine Lerning for Signl Processing Fundmentls of Liner Alger Clss 6 August 9 Instructor: Bhiksh Rj 6 Aug -755/8-797 Administrivi Registrtion: Anyone on witlist still? Our TA is here Sourish
Operations with Matrices
 Section. Equlit of Mtrices Opertions with Mtrices There re three ws to represent mtri.. A mtri cn be denoted b n uppercse letter, such s A, B, or C.. A mtri cn be denoted b representtive element enclosed
Section. Equlit of Mtrices Opertions with Mtrices There re three ws to represent mtri.. A mtri cn be denoted b n uppercse letter, such s A, B, or C.. A mtri cn be denoted b representtive element enclosed
INTRODUCTION TO LINEAR ALGEBRA
 ME Applied Mthemtics for Mechnicl Engineers INTRODUCTION TO INEAR AGEBRA Mtrices nd Vectors Prof. Dr. Bülent E. Pltin Spring Sections & / ME Applied Mthemtics for Mechnicl Engineers INTRODUCTION TO INEAR
ME Applied Mthemtics for Mechnicl Engineers INTRODUCTION TO INEAR AGEBRA Mtrices nd Vectors Prof. Dr. Bülent E. Pltin Spring Sections & / ME Applied Mthemtics for Mechnicl Engineers INTRODUCTION TO INEAR
Uses of transformations. 3D transformations. Review of vectors. Vectors in 3D. Points vs. vectors. Homogeneous coordinates S S [ H [ S \ H \ S ] H ]
![Uses of transformations. 3D transformations. Review of vectors. Vectors in 3D. Points vs. vectors. Homogeneous coordinates S S [ H [ S \ H \ S ] H ]](/thumbs/92/109192837.jpg "Uses of transformations. 3D transformations. Review of vectors. Vectors in 3D. Points vs. vectors. Homogeneous coordinates S S [ H [ S \ H \ S ] H ]") Uses of trnsformtions 3D trnsformtions Modeling: position nd resize prts of complex model; Viewing: define nd position the virtul cmer Animtion: define how objects move/chnge with time y y Sclr (dot) product
Uses of trnsformtions 3D trnsformtions Modeling: position nd resize prts of complex model; Viewing: define nd position the virtul cmer Animtion: define how objects move/chnge with time y y Sclr (dot) product
LINEAR ALGEBRA APPLIED
 5.5 Applictions of Inner Product Spces 5.5 Applictions of Inner Product Spces 7 Find the cross product of two vectors in R. Find the liner or qudrtic lest squres pproimtion of function. Find the nth-order
5.5 Applictions of Inner Product Spces 5.5 Applictions of Inner Product Spces 7 Find the cross product of two vectors in R. Find the liner or qudrtic lest squres pproimtion of function. Find the nth-order
1 Linear Least Squares
 Lest Squres Pge 1 1 Liner Lest Squres I will try to be consistent in nottion, with n being the number of dt points, nd m < n being the number of prmeters in model function. We re interested in solving
Lest Squres Pge 1 1 Liner Lest Squres I will try to be consistent in nottion, with n being the number of dt points, nd m < n being the number of prmeters in model function. We re interested in solving
The Algebra (al-jabr) of Matrices
 of Matrices") Section : Mtri lgebr nd Clculus Wshkewicz College of Engineering he lgebr (l-jbr) of Mtrices lgebr s brnch of mthemtics is much broder thn elementry lgebr ll of us studied in our high school dys. In sense
Section : Mtri lgebr nd Clculus Wshkewicz College of Engineering he lgebr (l-jbr) of Mtrices lgebr s brnch of mthemtics is much broder thn elementry lgebr ll of us studied in our high school dys. In sense
Numerical Linear Algebra Assignment 008
 Numericl Liner Algebr Assignment 008 Nguyen Qun B Hong Students t Fculty of Mth nd Computer Science, Ho Chi Minh University of Science, Vietnm emil. nguyenqunbhong@gmil.com blog. http://hongnguyenqunb.wordpress.com
Numericl Liner Algebr Assignment 008 Nguyen Qun B Hong Students t Fculty of Mth nd Computer Science, Ho Chi Minh University of Science, Vietnm emil. nguyenqunbhong@gmil.com blog. http://hongnguyenqunb.wordpress.com
Matrix Eigenvalues and Eigenvectors September 13, 2017
 Mtri Eigenvlues nd Eigenvectors September, 7 Mtri Eigenvlues nd Eigenvectors Lrry Cretto Mechnicl Engineering 5A Seminr in Engineering Anlysis September, 7 Outline Review lst lecture Definition of eigenvlues
Mtri Eigenvlues nd Eigenvectors September, 7 Mtri Eigenvlues nd Eigenvectors Lrry Cretto Mechnicl Engineering 5A Seminr in Engineering Anlysis September, 7 Outline Review lst lecture Definition of eigenvlues
Chapter 5 Determinants
 hpter 5 Determinnts 5. Introduction Every squre mtri hs ssocited with it sclr clled its determinnt. Given mtri, we use det() or to designte its determinnt. We cn lso designte the determinnt of mtri by
hpter 5 Determinnts 5. Introduction Every squre mtri hs ssocited with it sclr clled its determinnt. Given mtri, we use det() or to designte its determinnt. We cn lso designte the determinnt of mtri by
ES.182A Topic 32 Notes Jeremy Orloff
 ES.8A Topic 3 Notes Jerem Orloff 3 Polr coordintes nd double integrls 3. Polr Coordintes (, ) = (r cos(θ), r sin(θ)) r θ Stndrd,, r, θ tringle Polr coordintes re just stndrd trigonometric reltions. In
ES.8A Topic 3 Notes Jerem Orloff 3 Polr coordintes nd double integrls 3. Polr Coordintes (, ) = (r cos(θ), r sin(θ)) r θ Stndrd,, r, θ tringle Polr coordintes re just stndrd trigonometric reltions. In
Chapter 2. Vectors. 2.1 Vectors Scalars and Vectors
 Chpter 2 Vectors 2.1 Vectors 2.1.1 Sclrs nd Vectors A vector is quntity hving both mgnitude nd direction. Emples of vector quntities re velocity, force nd position. One cn represent vector in n-dimensionl
Chpter 2 Vectors 2.1 Vectors 2.1.1 Sclrs nd Vectors A vector is quntity hving both mgnitude nd direction. Emples of vector quntities re velocity, force nd position. One cn represent vector in n-dimensionl
Lecture Solution of a System of Linear Equation
 ChE Lecture Notes, Dept. of Chemicl Engineering, Univ. of TN, Knoville - D. Keffer, 5/9/98 (updted /) Lecture 8- - Solution of System of Liner Eqution 8. Why is it importnt to e le to solve system of liner
ChE Lecture Notes, Dept. of Chemicl Engineering, Univ. of TN, Knoville - D. Keffer, 5/9/98 (updted /) Lecture 8- - Solution of System of Liner Eqution 8. Why is it importnt to e le to solve system of liner
Chapter 3 MATRIX. In this chapter: 3.1 MATRIX NOTATION AND TERMINOLOGY
 Chpter 3 MTRIX In this chpter: Definition nd terms Specil Mtrices Mtrix Opertion: Trnspose, Equlity, Sum, Difference, Sclr Multipliction, Mtrix Multipliction, Determinnt, Inverse ppliction of Mtrix in
Chpter 3 MTRIX In this chpter: Definition nd terms Specil Mtrices Mtrix Opertion: Trnspose, Equlity, Sum, Difference, Sclr Multipliction, Mtrix Multipliction, Determinnt, Inverse ppliction of Mtrix in
Differential Geometry: Conformal Maps
 Differentil Geometry: Conforml Mps Liner Trnsformtions Definition: We sy tht liner trnsformtion M:R n R n preserves ngles if M(v) 0 for ll v 0 nd: Mv, Mw v, w Mv Mw v w for ll v nd w in R n. Liner Trnsformtions
Differentil Geometry: Conforml Mps Liner Trnsformtions Definition: We sy tht liner trnsformtion M:R n R n preserves ngles if M(v) 0 for ll v 0 nd: Mv, Mw v, w Mv Mw v w for ll v nd w in R n. Liner Trnsformtions
Algebra Of Matrices & Determinants
 lgebr Of Mtrices & Determinnts Importnt erms Definitions & Formule 0 Mtrix - bsic introduction: mtrix hving m rows nd n columns is clled mtrix of order m n (red s m b n mtrix) nd mtrix of order lso in
lgebr Of Mtrices & Determinnts Importnt erms Definitions & Formule 0 Mtrix - bsic introduction: mtrix hving m rows nd n columns is clled mtrix of order m n (red s m b n mtrix) nd mtrix of order lso in
11-755/ Machine Learning for Signal Processing. Algebra. Class Sep Instructor: Bhiksha Raj
 -755/8-797 Mchine Lerning for Signl Processing Fundmentls of Liner Alger Clss -3 Sep Instructor: Bhiksh Rj Sep -755/8-797 Administrivi Registrtion: Anyone on witlist still? Homework : Will e hnded out
-755/8-797 Mchine Lerning for Signl Processing Fundmentls of Liner Alger Clss -3 Sep Instructor: Bhiksh Rj Sep -755/8-797 Administrivi Registrtion: Anyone on witlist still? Homework : Will e hnded out
Matrices and Determinants
 Nme Chpter 8 Mtrices nd Determinnts Section 8.1 Mtrices nd Systems of Equtions Objective: In this lesson you lerned how to use mtrices, Gussin elimintion, nd Guss-Jordn elimintion to solve systems of liner
Nme Chpter 8 Mtrices nd Determinnts Section 8.1 Mtrices nd Systems of Equtions Objective: In this lesson you lerned how to use mtrices, Gussin elimintion, nd Guss-Jordn elimintion to solve systems of liner
Fundamentals of Linear Algebra
 -7/8-797 Mchine Lerning for Signl Processing Fundmentls of Liner Alger Administrivi Registrtion: Anone on witlist still? Homewor : Will pper over weeend Liner lger Clss Aug Instructor: Bhish Rj -7/8-797
-7/8-797 Mchine Lerning for Signl Processing Fundmentls of Liner Alger Administrivi Registrtion: Anone on witlist still? Homewor : Will pper over weeend Liner lger Clss Aug Instructor: Bhish Rj -7/8-797
M344 - ADVANCED ENGINEERING MATHEMATICS
 M3 - ADVANCED ENGINEERING MATHEMATICS Lecture 18: Lplce s Eqution, Anltic nd Numericl Solution Our emple of n elliptic prtil differentil eqution is Lplce s eqution, lso clled the Diffusion Eqution. If
M3 - ADVANCED ENGINEERING MATHEMATICS Lecture 18: Lplce s Eqution, Anltic nd Numericl Solution Our emple of n elliptic prtil differentil eqution is Lplce s eqution, lso clled the Diffusion Eqution. If
Math 520 Final Exam Topic Outline Sections 1 3 (Xiao/Dumas/Liaw) Spring 2008
 Spring 2008") Mth 520 Finl Exm Topic Outline Sections 1 3 (Xio/Dums/Liw) Spring 2008 The finl exm will be held on Tuesdy, My 13, 2-5pm in 117 McMilln Wht will be covered The finl exm will cover the mteril from ll of
Mth 520 Finl Exm Topic Outline Sections 1 3 (Xio/Dums/Liw) Spring 2008 The finl exm will be held on Tuesdy, My 13, 2-5pm in 117 McMilln Wht will be covered The finl exm will cover the mteril from ll of
Lecture Note 9: Orthogonal Reduction
 MATH : Computtionl Methods of Liner Algebr 1 The Row Echelon Form Lecture Note 9: Orthogonl Reduction Our trget is to solve the norml eution: Xinyi Zeng Deprtment of Mthemticl Sciences, UTEP A t Ax = A
MATH : Computtionl Methods of Liner Algebr 1 The Row Echelon Form Lecture Note 9: Orthogonl Reduction Our trget is to solve the norml eution: Xinyi Zeng Deprtment of Mthemticl Sciences, UTEP A t Ax = A
MATRICES AND VECTORS SPACE
 MATRICES AND VECTORS SPACE MATRICES AND MATRIX OPERATIONS SYSTEM OF LINEAR EQUATIONS DETERMINANTS VECTORS IN -SPACE AND -SPACE GENERAL VECTOR SPACES INNER PRODUCT SPACES EIGENVALUES, EIGENVECTORS LINEAR
MATRICES AND VECTORS SPACE MATRICES AND MATRIX OPERATIONS SYSTEM OF LINEAR EQUATIONS DETERMINANTS VECTORS IN -SPACE AND -SPACE GENERAL VECTOR SPACES INNER PRODUCT SPACES EIGENVALUES, EIGENVECTORS LINEAR
GG303 Lab 6 9/25/12. Components of cross product v2 x v1 N x N y N z. N=v2xv1. Plane trend ( ) Pole N. Plane. Pole N. plunge ( ) strike ( ) dip ( )
 Pole N. Plane. Pole N. plunge ( ) strike ( ) dip ( )") 1 Lb 6 ROTATIONS (163 pts totl) Eercise 1: Apprent dip problem (24 points totl) 1) An pprent dip of 62 to the southwest is mesured for bedding plne in verticl cross section tht strikes 230 (cll this pprent
1 Lb 6 ROTATIONS (163 pts totl) Eercise 1: Apprent dip problem (24 points totl) 1) An pprent dip of 62 to the southwest is mesured for bedding plne in verticl cross section tht strikes 230 (cll this pprent
A Matrix Algebra Primer
 A Mtrix Algebr Primer Mtrices, Vectors nd Sclr Multipliction he mtrix, D, represents dt orgnized into rows nd columns where the rows represent one vrible, e.g. time, nd the columns represent second vrible,
A Mtrix Algebr Primer Mtrices, Vectors nd Sclr Multipliction he mtrix, D, represents dt orgnized into rows nd columns where the rows represent one vrible, e.g. time, nd the columns represent second vrible,
THE DISCRIMINANT & ITS APPLICATIONS
 THE DISCRIMINANT & ITS APPLICATIONS The discriminnt ( Δ ) is the epression tht is locted under the squre root sign in the qudrtic formul i.e. Δ b c. For emple: Given +, Δ () ( )() The discriminnt is used
THE DISCRIMINANT & ITS APPLICATIONS The discriminnt ( Δ ) is the epression tht is locted under the squre root sign in the qudrtic formul i.e. Δ b c. For emple: Given +, Δ () ( )() The discriminnt is used
MATRIX DEFINITION A matrix is any doubly subscripted array of elements arranged in rows and columns.
 4.5 THEORETICL SOIL MECHNICS Vector nd Mtrix lger Review MTRIX DEFINITION mtrix is ny douly suscripted rry of elements rrnged in rows nd columns. m - Column Revised /0 n -Row m,,,,,, n n mn ij nd Order
4.5 THEORETICL SOIL MECHNICS Vector nd Mtrix lger Review MTRIX DEFINITION mtrix is ny douly suscripted rry of elements rrnged in rows nd columns. m - Column Revised /0 n -Row m,,,,,, n n mn ij nd Order
Things to Memorize: A Partial List. January 27, 2017
 Things to Memorize: A Prtil List Jnury 27, 2017 Chpter 2 Vectors - Bsic Fcts A vector hs mgnitude (lso clled size/length/norm) nd direction. It does not hve fixed position, so the sme vector cn e moved
Things to Memorize: A Prtil List Jnury 27, 2017 Chpter 2 Vectors - Bsic Fcts A vector hs mgnitude (lso clled size/length/norm) nd direction. It does not hve fixed position, so the sme vector cn e moved
Module 6: LINEAR TRANSFORMATIONS
 Module 6: LINEAR TRANSFORMATIONS. Trnsformtions nd mtrices Trnsformtions re generliztions of functions. A vector x in some set S n is mpped into m nother vector y T( x). A trnsformtion is liner if, for
Module 6: LINEAR TRANSFORMATIONS. Trnsformtions nd mtrices Trnsformtions re generliztions of functions. A vector x in some set S n is mpped into m nother vector y T( x). A trnsformtion is liner if, for
ROTATION IN 3D WORLD RIGID BODY MOTION
 OTATION IN 3D WOLD IGID BODY MOTION igid Bod Motion Simultion igid bod motion Eqution of motion ff mmvv NN ddiiωω/dddd Angulr velocit Integrtion of rottion nd it s eression is necessr. Simultion nd Eression
OTATION IN 3D WOLD IGID BODY MOTION igid Bod Motion Simultion igid bod motion Eqution of motion ff mmvv NN ddiiωω/dddd Angulr velocit Integrtion of rottion nd it s eression is necessr. Simultion nd Eression
Introduction to Algebra - Part 2
 Alger Module A Introduction to Alger - Prt Copright This puliction The Northern Alert Institute of Technolog 00. All Rights Reserved. LAST REVISED Oct., 008 Introduction to Alger - Prt Sttement of Prerequisite
Alger Module A Introduction to Alger - Prt Copright This puliction The Northern Alert Institute of Technolog 00. All Rights Reserved. LAST REVISED Oct., 008 Introduction to Alger - Prt Sttement of Prerequisite
DEFINITION OF ASSOCIATIVE OR DIRECT PRODUCT AND ROTATION OF VECTORS
 3 DEFINITION OF ASSOCIATIVE OR DIRECT PRODUCT AND ROTATION OF VECTORS This chpter summrizes few properties of Cli ord Algebr nd describe its usefulness in e ecting vector rottions. 3.1 De nition of Associtive
3 DEFINITION OF ASSOCIATIVE OR DIRECT PRODUCT AND ROTATION OF VECTORS This chpter summrizes few properties of Cli ord Algebr nd describe its usefulness in e ecting vector rottions. 3.1 De nition of Associtive
Introduction To Matrices MCV 4UI Assignment #1
 Introduction To Mtrices MCV UI Assignment # INTRODUCTION: A mtrix plurl: mtrices) is rectngulr rry of numbers rrnged in rows nd columns Exmples: ) b) c) [ ] d) Ech number ppering in the rry is sid to be
Introduction To Mtrices MCV UI Assignment # INTRODUCTION: A mtrix plurl: mtrices) is rectngulr rry of numbers rrnged in rows nd columns Exmples: ) b) c) [ ] d) Ech number ppering in the rry is sid to be
Chapter 3. Vector Spaces
 3.4 Liner Trnsformtions 1 Chpter 3. Vector Spces 3.4 Liner Trnsformtions Note. We hve lredy studied liner trnsformtions from R n into R m. Now we look t liner trnsformtions from one generl vector spce
3.4 Liner Trnsformtions 1 Chpter 3. Vector Spces 3.4 Liner Trnsformtions Note. We hve lredy studied liner trnsformtions from R n into R m. Now we look t liner trnsformtions from one generl vector spce
September 13 Homework Solutions
 College of Engineering nd Computer Science Mechnicl Engineering Deprtment Mechnicl Engineering 5A Seminr in Engineering Anlysis Fll Ticket: 5966 Instructor: Lrry Cretto Septemer Homework Solutions. Are
College of Engineering nd Computer Science Mechnicl Engineering Deprtment Mechnicl Engineering 5A Seminr in Engineering Anlysis Fll Ticket: 5966 Instructor: Lrry Cretto Septemer Homework Solutions. Are
Visual motion. Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys
 Visul motion Mn slides dpted from S. Seitz, R. Szeliski, M. Pollefes Outline Applictions of segmenttion to video Motion nd perceptul orgniztion Motion field Opticl flow Motion segmenttion with lers Video
Visul motion Mn slides dpted from S. Seitz, R. Szeliski, M. Pollefes Outline Applictions of segmenttion to video Motion nd perceptul orgniztion Motion field Opticl flow Motion segmenttion with lers Video
Engineering Analysis ENG 3420 Fall Dan C. Marinescu Office: HEC 439 B Office hours: Tu-Th 11:00-12:00
 Engineering Anlysis ENG 3420 Fll 2009 Dn C. Mrinescu Office: HEC 439 B Office hours: Tu-Th 11:00-12:00 Lecture 13 Lst time: Problem solving in preprtion for the quiz Liner Algebr Concepts Vector Spces,
Engineering Anlysis ENG 3420 Fll 2009 Dn C. Mrinescu Office: HEC 439 B Office hours: Tu-Th 11:00-12:00 Lecture 13 Lst time: Problem solving in preprtion for the quiz Liner Algebr Concepts Vector Spces,
A - INTRODUCTION AND OVERVIEW
 MMJ5 COMPUTATIONAL METHOD IN SOLID MECHANICS A - INTRODUCTION AND OVERVIEW INTRODUCTION AND OVERVIEW M.N. Tmin, CSMLb, UTM MMJ5 COMPUTATIONAL METHOD IN SOLID MECHANICS Course Content: A INTRODUCTION AND
MMJ5 COMPUTATIONAL METHOD IN SOLID MECHANICS A - INTRODUCTION AND OVERVIEW INTRODUCTION AND OVERVIEW M.N. Tmin, CSMLb, UTM MMJ5 COMPUTATIONAL METHOD IN SOLID MECHANICS Course Content: A INTRODUCTION AND
Functions and transformations
 Functions nd trnsformtions A Trnsformtions nd the prbol B The cubic function in power form C The power function (the hperbol) D The power function (the truncus) E The squre root function in power form
Functions nd trnsformtions A Trnsformtions nd the prbol B The cubic function in power form C The power function (the hperbol) D The power function (the truncus) E The squre root function in power form
Counting intersections of spirals on a torus
 Counting intersections of spirls on torus 1 The problem Consider unit squre with opposite sides identified. For emple, if we leve the centre of the squre trveling long line of slope 2 (s shown in the first
Counting intersections of spirls on torus 1 The problem Consider unit squre with opposite sides identified. For emple, if we leve the centre of the squre trveling long line of slope 2 (s shown in the first
MATH34032: Green s Functions, Integral Equations and the Calculus of Variations 1
 MATH34032: Green s Functions, Integrl Equtions nd the Clculus of Vritions 1 Section 1 Function spces nd opertors Here we gives some brief detils nd definitions, prticulrly relting to opertors. For further
MATH34032: Green s Functions, Integrl Equtions nd the Clculus of Vritions 1 Section 1 Function spces nd opertors Here we gives some brief detils nd definitions, prticulrly relting to opertors. For further
Lecture 4 Single View Metrology
 Lecture 4 Single View Metrology Professor Silio Srese Computtionl Vision nd Geometry Lb Silio Srese Lecture 4-6-Jn-5 Lecture 4 Single View Metrology Reiew clibrtion nd 2D trnsformtions Vnishing points
Lecture 4 Single View Metrology Professor Silio Srese Computtionl Vision nd Geometry Lb Silio Srese Lecture 4-6-Jn-5 Lecture 4 Single View Metrology Reiew clibrtion nd 2D trnsformtions Vnishing points
MTH 5102 Linear Algebra Practice Exam 1 - Solutions Feb. 9, 2016
 Nme (Lst nme, First nme): MTH 502 Liner Algebr Prctice Exm - Solutions Feb 9, 206 Exm Instructions: You hve hour & 0 minutes to complete the exm There re totl of 6 problems You must show your work Prtil
Nme (Lst nme, First nme): MTH 502 Liner Algebr Prctice Exm - Solutions Feb 9, 206 Exm Instructions: You hve hour & 0 minutes to complete the exm There re totl of 6 problems You must show your work Prtil
Math 32B Discussion Session Session 7 Notes August 28, 2018
 Mth 32B iscussion ession ession 7 Notes August 28, 28 In tody s discussion we ll tlk bout surfce integrls both of sclr functions nd of vector fields nd we ll try to relte these to the mny other integrls
Mth 32B iscussion ession ession 7 Notes August 28, 28 In tody s discussion we ll tlk bout surfce integrls both of sclr functions nd of vector fields nd we ll try to relte these to the mny other integrls
Geometric Sequences. Geometric Sequence a sequence whose consecutive terms have a common ratio.
 Geometric Sequences Geometric Sequence sequence whose consecutive terms hve common rtio. Geometric Sequence A sequence is geometric if the rtios of consecutive terms re the sme. 2 3 4... 2 3 The number
Geometric Sequences Geometric Sequence sequence whose consecutive terms hve common rtio. Geometric Sequence A sequence is geometric if the rtios of consecutive terms re the sme. 2 3 4... 2 3 The number
Global Motion. Estimate motion using all pixels in the image. Parametric flow gives an equation, which describes optical flow for each pixel.
 Globl Flow Globl Motion Estimte motion using ll piels in the imge. Prmetric low gives n eqution, which describes opticl low or ech piel. Aine Projective Globl motion cn be used to generte mosics Object-bsed
Globl Flow Globl Motion Estimte motion using ll piels in the imge. Prmetric low gives n eqution, which describes opticl low or ech piel. Aine Projective Globl motion cn be used to generte mosics Object-bsed
Chapter 1: Logarithmic functions and indices
 Chpter : Logrithmic functions nd indices. You cn simplify epressions y using rules of indices m n m n m n m n ( m ) n mn m m m m n m m n Emple Simplify these epressions: 5 r r c 4 4 d 6 5 e ( ) f ( ) 4
Chpter : Logrithmic functions nd indices. You cn simplify epressions y using rules of indices m n m n m n m n ( m ) n mn m m m m n m m n Emple Simplify these epressions: 5 r r c 4 4 d 6 5 e ( ) f ( ) 4
1 Part II: Numerical Integration
 Mth 4 Lb 1 Prt II: Numericl Integrtion This section includes severl techniques for getting pproimte numericl vlues for definite integrls without using ntiderivtives. Mthemticll, ect nswers re preferble
Mth 4 Lb 1 Prt II: Numericl Integrtion This section includes severl techniques for getting pproimte numericl vlues for definite integrls without using ntiderivtives. Mthemticll, ect nswers re preferble
Optimization Lecture 1 Review of Differential Calculus for Functions of Single Variable.
 Optimiztion Lecture 1 Review of Differentil Clculus for Functions of Single Vrible http://users.encs.concordi.c/~luisrod, Jnury 14 Outline Optimiztion Problems Rel Numbers nd Rel Vectors Open, Closed nd
Optimiztion Lecture 1 Review of Differentil Clculus for Functions of Single Vrible http://users.encs.concordi.c/~luisrod, Jnury 14 Outline Optimiztion Problems Rel Numbers nd Rel Vectors Open, Closed nd
Logarithms. Logarithm is another word for an index or power. POWER. 2 is the power to which the base 10 must be raised to give 100.
 Logrithms. Logrithm is nother word for n inde or power. THIS IS A POWER STATEMENT BASE POWER FOR EXAMPLE : We lred know tht; = NUMBER 10² = 100 This is the POWER Sttement OR 2 is the power to which the
Logrithms. Logrithm is nother word for n inde or power. THIS IS A POWER STATEMENT BASE POWER FOR EXAMPLE : We lred know tht; = NUMBER 10² = 100 This is the POWER Sttement OR 2 is the power to which the
5.2 Exponent Properties Involving Quotients
 5. Eponent Properties Involving Quotients Lerning Objectives Use the quotient of powers property. Use the power of quotient property. Simplify epressions involving quotient properties of eponents. Use
5. Eponent Properties Involving Quotients Lerning Objectives Use the quotient of powers property. Use the power of quotient property. Simplify epressions involving quotient properties of eponents. Use
1. Extend QR downwards to meet the x-axis at U(6, 0). y
. y") In the digrm, two stright lines re to be drwn through so tht the lines divide the figure OPQRST into pieces of equl re Find the sum of the slopes of the lines R(6, ) S(, ) T(, 0) Determine ll liner functions
In the digrm, two stright lines re to be drwn through so tht the lines divide the figure OPQRST into pieces of equl re Find the sum of the slopes of the lines R(6, ) S(, ) T(, 0) Determine ll liner functions
ODE: Existence and Uniqueness of a Solution
 Mth 22 Fll 213 Jerry Kzdn ODE: Existence nd Uniqueness of Solution The Fundmentl Theorem of Clculus tells us how to solve the ordinry differentil eqution (ODE) du = f(t) dt with initil condition u() =
Mth 22 Fll 213 Jerry Kzdn ODE: Existence nd Uniqueness of Solution The Fundmentl Theorem of Clculus tells us how to solve the ordinry differentil eqution (ODE) du = f(t) dt with initil condition u() =
Worksheet : Class XII Matrices & Determinants
 Worksheet : Clss XII Mtries & Determinnts Prepred B:Mr. durhimn K Mth Teher l-hej Interntionl Shool, Jeddh (IGCSE). rhmnrk@gmil.om #00966007900# MTHEMTICS WKSHEET I Nme: Mrh 0. If 8 LGEBR (Mtries nd Determinnts)
Worksheet : Clss XII Mtries & Determinnts Prepred B:Mr. durhimn K Mth Teher l-hej Interntionl Shool, Jeddh (IGCSE). rhmnrk@gmil.om #00966007900# MTHEMTICS WKSHEET I Nme: Mrh 0. If 8 LGEBR (Mtries nd Determinnts)
SECTION A STUDENT MATERIAL. Part 1. What and Why.?
 SECTION A STUDENT MATERIAL Prt Wht nd Wh.? Student Mteril Prt Prolem n > 0 n > 0 Is the onverse true? Prolem If n is even then n is even. If n is even then n is even. Wht nd Wh? Eploring Pure Mths Are
SECTION A STUDENT MATERIAL Prt Wht nd Wh.? Student Mteril Prt Prolem n > 0 n > 0 Is the onverse true? Prolem If n is even then n is even. If n is even then n is even. Wht nd Wh? Eploring Pure Mths Are
A matrix is a set of numbers or symbols arranged in a square or rectangular array of m rows and n columns as
 RMI University ENDIX MRIX GEBR INRDUCIN Mtrix lgebr is powerful mthemticl tool, which is extremely useful in modern computtionl techniques pplicble to sptil informtion science. It is neither new nor difficult,
RMI University ENDIX MRIX GEBR INRDUCIN Mtrix lgebr is powerful mthemticl tool, which is extremely useful in modern computtionl techniques pplicble to sptil informtion science. It is neither new nor difficult,
Math 270A: Numerical Linear Algebra
 Mth 70A: Numericl Liner Algebr Instructor: Michel Holst Fll Qurter 014 Homework Assignment #3 Due Give to TA t lest few dys before finl if you wnt feedbck. Exercise 3.1. (The Bsic Liner Method for Liner
Mth 70A: Numericl Liner Algebr Instructor: Michel Holst Fll Qurter 014 Homework Assignment #3 Due Give to TA t lest few dys before finl if you wnt feedbck. Exercise 3.1. (The Bsic Liner Method for Liner
Chapter 16. Molecular Symmetry
 I. Smmetr Chpter 6. Moleculr Smmetr Elements xis mirror plne inversion center... Opertions rottion bout n xis reflection thru plne inversion thru center Five smmetr elements nd corresponding opertions:
I. Smmetr Chpter 6. Moleculr Smmetr Elements xis mirror plne inversion center... Opertions rottion bout n xis reflection thru plne inversion thru center Five smmetr elements nd corresponding opertions:
a a a a a a a a a a a a a a a a a a a a a a a a In this section, we introduce a general formula for computing determinants.
 Section 9 The Lplce Expnsion In the lst section, we defined the determinnt of (3 3) mtrix A 12 to be 22 12 21 22 2231 22 12 21. In this section, we introduce generl formul for computing determinnts. Rewriting
Section 9 The Lplce Expnsion In the lst section, we defined the determinnt of (3 3) mtrix A 12 to be 22 12 21 22 2231 22 12 21. In this section, we introduce generl formul for computing determinnts. Rewriting
Here we study square linear systems and properties of their coefficient matrices as they relate to the solution set of the linear system.
 Section 24 Nonsingulr Liner Systems Here we study squre liner systems nd properties of their coefficient mtrices s they relte to the solution set of the liner system Let A be n n Then we know from previous
Section 24 Nonsingulr Liner Systems Here we study squre liner systems nd properties of their coefficient mtrices s they relte to the solution set of the liner system Let A be n n Then we know from previous
AQA Further Pure 1. Complex Numbers. Section 1: Introduction to Complex Numbers. The number system
 Complex Numbers Section 1: Introduction to Complex Numbers Notes nd Exmples These notes contin subsections on The number system Adding nd subtrcting complex numbers Multiplying complex numbers Complex
Complex Numbers Section 1: Introduction to Complex Numbers Notes nd Exmples These notes contin subsections on The number system Adding nd subtrcting complex numbers Multiplying complex numbers Complex
Dynamics: Newton s Laws of Motion
 Lecture 7 Chpter 4 Physics I 09.25.2013 Dynmics: Newton s Lws of Motion Solving Problems using Newton s lws Course website: http://fculty.uml.edu/andriy_dnylov/teching/physicsi Lecture Cpture: http://echo360.uml.edu/dnylov2013/physics1fll.html
Lecture 7 Chpter 4 Physics I 09.25.2013 Dynmics: Newton s Lws of Motion Solving Problems using Newton s lws Course website: http://fculty.uml.edu/andriy_dnylov/teching/physicsi Lecture Cpture: http://echo360.uml.edu/dnylov2013/physics1fll.html
Calculus - Activity 1 Rate of change of a function at a point.
 Nme: Clss: p 77 Mths Helper Plus Resource Set. Copright 00 Bruce A. Vughn, Techers Choice Softwre Clculus - Activit Rte of chnge of function t point. ) Strt Mths Helper Plus, then lod the file: Clculus
Nme: Clss: p 77 Mths Helper Plus Resource Set. Copright 00 Bruce A. Vughn, Techers Choice Softwre Clculus - Activit Rte of chnge of function t point. ) Strt Mths Helper Plus, then lod the file: Clculus
Chapter 2. Determinants
 Chpter Determinnts The Determinnt Function Recll tht the X mtrix A c b d is invertible if d-bc0. The expression d-bc occurs so frequently tht it hs nme; it is clled the determinnt of the mtrix A nd is
Chpter Determinnts The Determinnt Function Recll tht the X mtrix A c b d is invertible if d-bc0. The expression d-bc occurs so frequently tht it hs nme; it is clled the determinnt of the mtrix A nd is
Matrices. Elementary Matrix Theory. Definition of a Matrix. Matrix Elements:
 Mtrices Elementry Mtrix Theory It is often desirble to use mtrix nottion to simplify complex mthemticl expressions. The simplifying mtrix nottion usully mkes the equtions much esier to hndle nd mnipulte.
Mtrices Elementry Mtrix Theory It is often desirble to use mtrix nottion to simplify complex mthemticl expressions. The simplifying mtrix nottion usully mkes the equtions much esier to hndle nd mnipulte.
Introduction to Determinants. Remarks. Remarks. The determinant applies in the case of square matrices
 Introduction to Determinnts Remrks The determinnt pplies in the cse of squre mtrices squre mtrix is nonsingulr if nd only if its determinnt not zero, hence the term determinnt Nonsingulr mtrices re sometimes
Introduction to Determinnts Remrks The determinnt pplies in the cse of squre mtrices squre mtrix is nonsingulr if nd only if its determinnt not zero, hence the term determinnt Nonsingulr mtrices re sometimes
Design Synthesis. specified positions called precision points zero error at precision points small error between points - optimization
 esign Snthesis..situtions in the esign of mechnicl evices in which it is necessr to either guie rigi o through series of specifie, finitel seprte positions or to impose constrints limits on the velocit
esign Snthesis..situtions in the esign of mechnicl evices in which it is necessr to either guie rigi o through series of specifie, finitel seprte positions or to impose constrints limits on the velocit
set is not closed under matrix [ multiplication, ] and does not form a group.
![set is not closed under matrix [ multiplication, ] and does not form a group.](/thumbs/78/78412113.jpg "set is not closed under matrix [ multiplication, ] and does not form a group.") Prolem 2.3: Which of the following collections of 2 2 mtrices with rel entries form groups under [ mtrix ] multipliction? i) Those of the form for which c d 2 Answer: The set of such mtrices is not closed
Prolem 2.3: Which of the following collections of 2 2 mtrices with rel entries form groups under [ mtrix ] multipliction? i) Those of the form for which c d 2 Answer: The set of such mtrices is not closed
VECTORS, TENSORS, AND MATRICES. 2 + Az. A vector A can be defined by its length A and the direction of a unit
 GG33 Lecture 7 5/17/6 1 VECTORS, TENSORS, ND MTRICES I Min Topics C Vector length nd direction Vector Products Tensor nottion vs. mtrix nottion II Vector Products Vector length: x 2 + y 2 + z 2 vector
GG33 Lecture 7 5/17/6 1 VECTORS, TENSORS, ND MTRICES I Min Topics C Vector length nd direction Vector Products Tensor nottion vs. mtrix nottion II Vector Products Vector length: x 2 + y 2 + z 2 vector
In Section 5.3 we considered initial value problems for the linear second order equation. y.a/ C ˇy 0.a/ D k 1 (13.1.4)
") 678 Chpter 13 Boundry Vlue Problems for Second Order Ordinry Differentil Equtions 13.1 TWO-POINT BOUNDARY VALUE PROBLEMS In Section 5.3 we considered initil vlue problems for the liner second order eqution
678 Chpter 13 Boundry Vlue Problems for Second Order Ordinry Differentil Equtions 13.1 TWO-POINT BOUNDARY VALUE PROBLEMS In Section 5.3 we considered initil vlue problems for the liner second order eqution
along the vector 5 a) Find the plane s coordinate after 1 hour. b) Find the plane s coordinate after 2 hours. c) Find the plane s coordinate
 Find the plane s coordinate after 1 hour. b) Find the plane s coordinate after 2 hours. c) Find the plane s coordinate") L8 VECTOR EQUATIONS OF LINES HL Mth - Sntowski Vector eqution of line 1 A plne strts journey t the point (4,1) moves ech hour long the vector. ) Find the plne s coordinte fter 1 hour. b) Find the plne
L8 VECTOR EQUATIONS OF LINES HL Mth - Sntowski Vector eqution of line 1 A plne strts journey t the point (4,1) moves ech hour long the vector. ) Find the plne s coordinte fter 1 hour. b) Find the plne
Chapter 3 Polynomials
 Dr M DRAIEF As described in the introduction of Chpter 1, pplictions of solving liner equtions rise in number of different settings In prticulr, we will in this chpter focus on the problem of modelling
Dr M DRAIEF As described in the introduction of Chpter 1, pplictions of solving liner equtions rise in number of different settings In prticulr, we will in this chpter focus on the problem of modelling
Point Lattices: Bravais Lattices
 Physics for Solid Stte Applictions Februry 18, 2004 Lecture 7: Periodic Structures (cont.) Outline Review 2D & 3D Periodic Crystl Structures: Mthemtics X-Ry Diffrction: Observing Reciprocl Spce Point Lttices:
Physics for Solid Stte Applictions Februry 18, 2004 Lecture 7: Periodic Structures (cont.) Outline Review 2D & 3D Periodic Crystl Structures: Mthemtics X-Ry Diffrction: Observing Reciprocl Spce Point Lttices:
Multivariate problems and matrix algebra
 University of Ferrr Stefno Bonnini Multivrite problems nd mtrix lgebr Multivrite problems Multivrite sttisticl nlysis dels with dt contining observtions on two or more chrcteristics (vribles) ech mesured
University of Ferrr Stefno Bonnini Multivrite problems nd mtrix lgebr Multivrite problems Multivrite sttisticl nlysis dels with dt contining observtions on two or more chrcteristics (vribles) ech mesured
How do you know you have SLE?
 Simultneous Liner Equtions Simultneous Liner Equtions nd Liner Algebr Simultneous liner equtions (SLE s) occur frequently in Sttics, Dynmics, Circuits nd other engineering clsses Need to be ble to, nd
Simultneous Liner Equtions Simultneous Liner Equtions nd Liner Algebr Simultneous liner equtions (SLE s) occur frequently in Sttics, Dynmics, Circuits nd other engineering clsses Need to be ble to, nd
Matrix Solution to Linear Equations and Markov Chains
 Trding Systems nd Methods, Fifth Edition By Perry J. Kufmn Copyright 2005, 2013 by Perry J. Kufmn APPENDIX 2 Mtrix Solution to Liner Equtions nd Mrkov Chins DIRECT SOLUTION AND CONVERGENCE METHOD Before
Trding Systems nd Methods, Fifth Edition By Perry J. Kufmn Copyright 2005, 2013 by Perry J. Kufmn APPENDIX 2 Mtrix Solution to Liner Equtions nd Mrkov Chins DIRECT SOLUTION AND CONVERGENCE METHOD Before
ECON 331 Lecture Notes: Ch 4 and Ch 5
 Mtrix Algebr ECON 33 Lecture Notes: Ch 4 nd Ch 5. Gives us shorthnd wy of writing lrge system of equtions.. Allows us to test for the existnce of solutions to simultneous systems. 3. Allows us to solve
Mtrix Algebr ECON 33 Lecture Notes: Ch 4 nd Ch 5. Gives us shorthnd wy of writing lrge system of equtions.. Allows us to test for the existnce of solutions to simultneous systems. 3. Allows us to solve
STRAND J: TRANSFORMATIONS, VECTORS and MATRICES
 Mthemtics SKE: STRN J STRN J: TRNSFORMTIONS, VETORS nd MTRIES J3 Vectors Text ontents Section J3.1 Vectors nd Sclrs * J3. Vectors nd Geometry Mthemtics SKE: STRN J J3 Vectors J3.1 Vectors nd Sclrs Vectors
Mthemtics SKE: STRN J STRN J: TRNSFORMTIONS, VETORS nd MTRIES J3 Vectors Text ontents Section J3.1 Vectors nd Sclrs * J3. Vectors nd Geometry Mthemtics SKE: STRN J J3 Vectors J3.1 Vectors nd Sclrs Vectors
How do we solve these things, especially when they get complicated? How do we know when a system has a solution, and when is it unique?
 XII. LINEAR ALGEBRA: SOLVING SYSTEMS OF EQUATIONS Tody we re going to tlk bout solving systems of liner equtions. These re problems tht give couple of equtions with couple of unknowns, like: 6 2 3 7 4
XII. LINEAR ALGEBRA: SOLVING SYSTEMS OF EQUATIONS Tody we re going to tlk bout solving systems of liner equtions. These re problems tht give couple of equtions with couple of unknowns, like: 6 2 3 7 4
Lesson 1: Quadratic Equations
 Lesson 1: Qudrtic Equtions Qudrtic Eqution: The qudrtic eqution in form is. In this section, we will review 4 methods of qudrtic equtions, nd when it is most to use ech method. 1. 3.. 4. Method 1: Fctoring
Lesson 1: Qudrtic Equtions Qudrtic Eqution: The qudrtic eqution in form is. In this section, we will review 4 methods of qudrtic equtions, nd when it is most to use ech method. 1. 3.. 4. Method 1: Fctoring
Exploring parametric representation with the TI-84 Plus CE graphing calculator
 Exploring prmetric representtion with the TI-84 Plus CE grphing clcultor Richrd Prr Executive Director Rice University School Mthemtics Project rprr@rice.edu Alice Fisher Director of Director of Technology
Exploring prmetric representtion with the TI-84 Plus CE grphing clcultor Richrd Prr Executive Director Rice University School Mthemtics Project rprr@rice.edu Alice Fisher Director of Director of Technology
Some Methods in the Calculus of Variations
 CHAPTER 6 Some Methods in the Clculus of Vritions 6-. If we use the vried function ( α, ) α sin( ) + () Then d α cos ( ) () d Thus, the totl length of the pth is d S + d d α cos ( ) + α cos ( ) d Setting
CHAPTER 6 Some Methods in the Clculus of Vritions 6-. If we use the vried function ( α, ) α sin( ) + () Then d α cos ( ) () d Thus, the totl length of the pth is d S + d d α cos ( ) + α cos ( ) d Setting
2A1A Vector Algebra and Calculus I
 Vector Algebr nd Clculus I (23) 2AA 2AA Vector Algebr nd Clculus I Bugs/queries to sjrob@robots.ox.c.uk Michelms 23. The tetrhedron in the figure hs vertices A, B, C, D t positions, b, c, d, respectively.
Vector Algebr nd Clculus I (23) 2AA 2AA Vector Algebr nd Clculus I Bugs/queries to sjrob@robots.ox.c.uk Michelms 23. The tetrhedron in the figure hs vertices A, B, C, D t positions, b, c, d, respectively.
Surface Integrals of Vector Fields
 Mth 32B iscussion ession Week 7 Notes Februry 21 nd 23, 2017 In lst week s notes we introduced surfce integrls, integrting sclr-vlued functions over prmetrized surfces. As with our previous integrls, we
Mth 32B iscussion ession Week 7 Notes Februry 21 nd 23, 2017 In lst week s notes we introduced surfce integrls, integrting sclr-vlued functions over prmetrized surfces. As with our previous integrls, we
Contents. Outline. Structured Rank Matrices Lecture 2: The theorem Proofs Examples related to structured ranks References. Structure Transport
 Contents Structured Rnk Mtrices Lecture 2: Mrc Vn Brel nd Rf Vndebril Dept. of Computer Science, K.U.Leuven, Belgium Chemnitz, Germny, 26-30 September 2011 1 Exmples relted to structured rnks 2 2 / 26
Contents Structured Rnk Mtrices Lecture 2: Mrc Vn Brel nd Rf Vndebril Dept. of Computer Science, K.U.Leuven, Belgium Chemnitz, Germny, 26-30 September 2011 1 Exmples relted to structured rnks 2 2 / 26
Summer Work Packet for MPH Math Classes
 Summer Work Pcket for MPH Mth Clsses Students going into Pre-clculus AC Sept. 018 Nme: This pcket is designed to help students sty current with their mth skills. Ech mth clss expects certin level of number
Summer Work Pcket for MPH Mth Clsses Students going into Pre-clculus AC Sept. 018 Nme: This pcket is designed to help students sty current with their mth skills. Ech mth clss expects certin level of number
In-Class Problems 2 and 3: Projectile Motion Solutions. In-Class Problem 2: Throwing a Stone Down a Hill
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Deprtment of Physics Physics 8T Fll Term 4 In-Clss Problems nd 3: Projectile Motion Solutions We would like ech group to pply the problem solving strtegy with the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Deprtment of Physics Physics 8T Fll Term 4 In-Clss Problems nd 3: Projectile Motion Solutions We would like ech group to pply the problem solving strtegy with the
UNIT 1 FUNCTIONS AND THEIR INVERSES Lesson 1.4: Logarithmic Functions as Inverses Instruction
 Lesson : Logrithmic Functions s Inverses Prerequisite Skills This lesson requires the use of the following skills: determining the dependent nd independent vribles in n exponentil function bsed on dt from
Lesson : Logrithmic Functions s Inverses Prerequisite Skills This lesson requires the use of the following skills: determining the dependent nd independent vribles in n exponentil function bsed on dt from
Best Approximation in the 2-norm
 Jim Lmbers MAT 77 Fll Semester 1-11 Lecture 1 Notes These notes correspond to Sections 9. nd 9.3 in the text. Best Approximtion in the -norm Suppose tht we wish to obtin function f n (x) tht is liner combintion
Jim Lmbers MAT 77 Fll Semester 1-11 Lecture 1 Notes These notes correspond to Sections 9. nd 9.3 in the text. Best Approximtion in the -norm Suppose tht we wish to obtin function f n (x) tht is liner combintion
Matrix Algebra. Matrix Addition, Scalar Multiplication and Transposition. Linear Algebra I 24
 Mtrix lger Mtrix ddition, Sclr Multipliction nd rnsposition Mtrix lger Section.. Mtrix ddition, Sclr Multipliction nd rnsposition rectngulr rry of numers is clled mtrix ( the plurl is mtrices ) nd the
Mtrix lger Mtrix ddition, Sclr Multipliction nd rnsposition Mtrix lger Section.. Mtrix ddition, Sclr Multipliction nd rnsposition rectngulr rry of numers is clled mtrix ( the plurl is mtrices ) nd the
Lecture 0. MATH REVIEW for ECE : LINEAR CIRCUIT ANALYSIS II
 Lecture 0 MATH REVIEW for ECE 000 : LINEAR CIRCUIT ANALYSIS II Aung Kyi Sn Grdute Lecturer School of Electricl nd Computer Engineering Purdue University Summer 014 Lecture 0 : Mth Review Lecture 0 is intended
Lecture 0 MATH REVIEW for ECE 000 : LINEAR CIRCUIT ANALYSIS II Aung Kyi Sn Grdute Lecturer School of Electricl nd Computer Engineering Purdue University Summer 014 Lecture 0 : Mth Review Lecture 0 is intended
Before we can begin Ch. 3 on Radicals, we need to be familiar with perfect squares, cubes, etc. Try and do as many as you can without a calculator!!!
 Nme: Algebr II Honors Pre-Chpter Homework Before we cn begin Ch on Rdicls, we need to be fmilir with perfect squres, cubes, etc Try nd do s mny s you cn without clcultor!!! n The nth root of n n Be ble
Nme: Algebr II Honors Pre-Chpter Homework Before we cn begin Ch on Rdicls, we need to be fmilir with perfect squres, cubes, etc Try nd do s mny s you cn without clcultor!!! n The nth root of n n Be ble
III. Vector data. First, create a unit circle which presents the margin of the stereonet. tan. sin. r=1. cos
 EDV in der Geologie, SS001 Vector dt Aims In session one ou will crete our own stereonet in Ecel. This cn plot poles to plnes nd linetions. Session two requires some bsic knowledge of liner lgebr, especill
EDV in der Geologie, SS001 Vector dt Aims In session one ou will crete our own stereonet in Ecel. This cn plot poles to plnes nd linetions. Session two requires some bsic knowledge of liner lgebr, especill
The final exam will take place on Friday May 11th from 8am 11am in Evans room 60.
 Mth 104: finl informtion The finl exm will tke plce on Fridy My 11th from 8m 11m in Evns room 60. The exm will cover ll prts of the course with equl weighting. It will cover Chpters 1 5, 7 15, 17 21, 23
Mth 104: finl informtion The finl exm will tke plce on Fridy My 11th from 8m 11m in Evns room 60. The exm will cover ll prts of the course with equl weighting. It will cover Chpters 1 5, 7 15, 17 21, 23
Multiple Integrals. Review of Single Integrals. Planar Area. Volume of Solid of Revolution
 Multiple Integrls eview of Single Integrls eding Trim 7.1 eview Appliction of Integrls: Are 7. eview Appliction of Integrls: Volumes 7.3 eview Appliction of Integrls: Lengths of Curves Assignment web pge
Multiple Integrls eview of Single Integrls eding Trim 7.1 eview Appliction of Integrls: Are 7. eview Appliction of Integrls: Volumes 7.3 eview Appliction of Integrls: Lengths of Curves Assignment web pge
Computer Graphics (CS 4731) Lecture 7: Linear Algebra for Graphics (Points, Scalars, Vectors)
 Lecture 7: Linear Algebra for Graphics (Points, Scalars, Vectors)") Computer Grphics (CS 4731) Lecture 7: Liner Alger for Grphics (Points, Sclrs, Vectors) Prof Emmnuel Agu Computer Science Dept. Worcester Poltechnic Institute (WPI) Annoncements Project 1 due net Tuesd,
Computer Grphics (CS 4731) Lecture 7: Liner Alger for Grphics (Points, Sclrs, Vectors) Prof Emmnuel Agu Computer Science Dept. Worcester Poltechnic Institute (WPI) Annoncements Project 1 due net Tuesd,
. Double-angle formulas. Your answer should involve trig functions of θ, and not of 2θ. sin 2 (θ) =
 =") Review of some needed Trig. Identities for Integrtion. Your nswers should be n ngle in RADIANS. rccos( 1 ) = π rccos( - 1 ) = 2π 2 3 2 3 rcsin( 1 ) = π rcsin( - 1 ) = -π 2 6 2 6 Cn you do similr problems?
Review of some needed Trig. Identities for Integrtion. Your nswers should be n ngle in RADIANS. rccos( 1 ) = π rccos( - 1 ) = 2π 2 3 2 3 rcsin( 1 ) = π rcsin( - 1 ) = -π 2 6 2 6 Cn you do similr problems?
SCHOOL OF ENGINEERING & BUILT ENVIRONMENT. Mathematics. Basic Algebra
 SCHOOL OF ENGINEERING & BUILT ENVIRONMENT Mthemtics Bsic Algebr Opertions nd Epressions Common Mistkes Division of Algebric Epressions Eponentil Functions nd Logrithms Opertions nd their Inverses Mnipulting
SCHOOL OF ENGINEERING & BUILT ENVIRONMENT Mthemtics Bsic Algebr Opertions nd Epressions Common Mistkes Division of Algebric Epressions Eponentil Functions nd Logrithms Opertions nd their Inverses Mnipulting