3.1 Classic Differential Geometry
|
|
|
- Stuart Osborne May
- 5 years ago
- Views:
Transcription

1 Spring 2015 CSCI 599: Digital Geometry Processing 3.1 Classic Differential Geometry Hao Li 1
2 Spring 2014 CSCI 599: Digital Geometry Processing 3.1 Classic Differential Geometry With a Twist! Hao Li 2
3 Administrative Exercise handouts: 11:59 PM on Monday Office hours later from 2pm to 3pm 3

4 Some Updates: run.usc.edu/vega Another awesome free library with half-edge data-structure By Prof. Jernej Barbic 4

5 FYI MeshLab! Popular Mesh Processing Software (meshlab.sourceforge.net) 5

6 FYI BeNTO3D! Mesh Processing Framework for Mac ( 6

 Geometry Topology")

7 Last Time Discrete Representations! Explicit (parametric, polygonal meshes) Implicit Surfaces (SDF, grid representation) Geometry Topology Conversions E I: Closest Point, SDF, Fast Marching I E: Marching Cubes Algorithm 7

8 Differential Geometry Why do we care?! Geometry of surfaces Mothertongue of physical theories Computation: processing / simulation 8


9 Motivation We need differential geometry to compute! surface curvature paramaterization distortion deformation energies 9


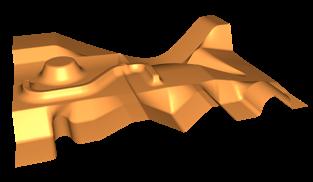
10 Applications: 3D Reconstruction 10

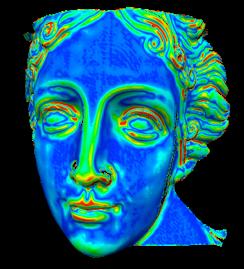
11 Applications: Head Modeling 11

12 Applications: Facial Animation 12
 mostly differential")
13 Motivation Geometry is the key! studied for centuries (Cartan, Poincaré, Lie, Hodge, de Rham, Gauss, Noether ) mostly differential geometry differential and integral calculus invariants and symmetries 13
14 Getting Started How to apply DiffGeo ideas?! surfaces as a collection of samples and topology (connectivity) apply continuous ideas BUT: setting is discrete what is the right way? discrete vs. discretized Let s look at that first 14





15 Getting Started What characterizes structure(s)?! What is shape? Euclidean Invariance What is physics? Conservation/Balance Laws What can we measure? area, curvature, mass, flux, circulation 15
16 Getting Started Invariant descriptors! quantities invariant under a set of transformations Intrinsic descriptor! quantities which do not depend on a coordinate frame 16
17 Outline Parametric Curves Parametric Surfaces Formalism & Intuition 17


18 Differential Geometry Leonard Euler ( ) Carl Friedrich Gauss ( ) 18
19 Parametric Curves x :[a, b] IR IR 3 x(b) a t b x(t) xt(t) x(a) x(t) = x(t) y(t) z(t) x t (t) := dx(t) dt = dx(t) /dt dy(t) /dt dz(t) /dt 19

20 Recall: Mappings Injective NO SELF-INTERSECTIONS! Surjective SELF-INTERSECTIONS! Bijective AMBIGUOUS PARAMETERIZATION 20
21 Parametric Curves A parametric curve x(t) is! x(t) simple: is injective (no self-intersections) differentiable: x t (t) is defined for all regular: for all t 2 [a, b] x t (t) 6= 0 t 2 [a, b] x(b) x(t) xt(t) x(a) 21
 x i x(a) x(b) a t t i b")
22 Length of a Curve Let t i = a + i t and x i = x(t i ) x i x(a) x(b) a t t i b 22
 x i t s = s(t) = a x t dt x(a) x(b) length =! integration of infinitesimal change! norm of speed a t t i b 23")
23 Length of a Curve Polyline chord length S = i x i = i x i t t, x i := x i+1 x i norm change Curve arc length ( t! 0 ) x i t s = s(t) = a x t dt x(a) x(b) length =! integration of infinitesimal change! norm of speed a t t i b 23
24 Re-Parameterization Mapping of parameter domain u :[a, b] [c, d] Re-parameterization w.r.t. u(t) [c, d] IR 3, t x(u(t)) Derivative (chain rule) dx(u(t)) dt = dx du du dt = x u (u(t)) u t (t) 24
25 Re-Parameterization Example f : 0, 1 2 IR 2, t (4t, 2t) : 0, 1 2 [0, 1], t 2t g : [0, 1] IR 2, t (2t, t) g( (t)) = f(t) 25
26 Arc Length Parameterization Mapping of parameter domain: t s(t) = a t x t dt Parameter s for x(s) equals length from x(a) to x(s) x(s) = x(s(t)) ds = x t dt Special properties of resulting curve same infinitesimal change x s (s) =1, x s (s) x ss (s) =0 defines orthonormal frame 26
27 The Frenet Frame Taylor expansion x(t + h) = x(t) +x t (t) h x tt(t) h x ttt(t) h for convergence analysis and approximations Define local frame (t, n, b) (Frenet frame) t = x t b = x t x tt n = b t x t x t x tt tangent main normal binormal 27

28 The Frenet Frame Orthonormalization of local frame x ttt x tt n b x t t local affine frame Frenet frame 28
29 The Frenet Frame Frenet-Serret: Derivatives w.r.t. arc length s t s = + n n s = t + b b s = n Curvature (deviation from straight line) = x ss n b Torsion (deviation from planarity) t = 1 2 det([x s, x ss, x sss ]) 29
30 Curvature and Torsion Planes defined by x and two vectors:! osculating plane: vectors and normal plane: vectors n and rectifying plane: vectors t and Osculating circle! second order contact with curve t b b n n b t center radius c = x +(1/apple)n 1/apple 30
31 Curvature and Torsion Curvature: Deviation from straight line Torsion: Deviation from planarity Independent of parameterization intrinsic properties of the curve Euclidean invariants invariant under rigid motion Define curve uniquely up to a rigid motion 31
32 Curvature: Some Intuition A line through two points on the curve (Secant) 32
33 Curvature: Some Intuition A line through two points on the curve (Secant) 33
34 Curvature: Some Intuition Tangent, the first approximation limiting secant as the two points come together 34
35 Curvature: Some Intuition Circle of curvature Consider the circle passing through 3 pints of the curve 35
36 Curvature: Some Intuition Circle of curvature The limiting circle as three points come together 36
37 Curvature: Some Intuition Radius of curvature r 37
38 Curvature: Some Intuition Radius of curvature r 38
39 Curvature: Some Intuition Signed curvature Sense of traversal along curve 39
40 Curvature: Some Intuition Gauß map Point on curve maps to point on unit circle 40
41 Curvature: Some Intuition Shape operator (Weingarten map) Change in normal as we slide along curve negative directional derivative D of Gauß map describes directional curvature using normals as degrees of freedom! accuracy/convergence/implementation (discretization) 41

42 Curvature: Some Intuition Turning number, k Number of orbits in Gaussian image 42

43 Curvature: Some Intuition Turning number theorem For a closed curve, the integral of curvature is an integer multiple of 2π 43
44 Take Home Message In the limit of a refinement sequence, discrete measure of length and curvature agree with continuous measures 44
45 Outline Parametric Curves Parametric Surfaces 45




46 Surfaces What characterizes shape?! shape does not depend on Euclidean motions metric and curvatures smooth continuous notions to discrete notions 46
47 Metric on Surfaces Measure Stuff! angle, length, area requires an inner product we have: Euclidean inner product in domain we want to turn this into: inner product on surface 47
48 Parametric Surfaces Continuous surface x(u, v) = Normal vector x(u, v) y(u, v) z(u, v) n = x u x v x u x v x u n p x v Assume regular parameterization x u x v = 0 normal exists 48
49 Angles on Surface Curve [u(t),v(t)] surface x(u, v) in uv-plane defines curve on the c(t) = x(u(t),v(t)) Two curves c 1 and c 2 intersecting at! p angle of intersection? t 1 t 2 two tangents and x u n x v! t i = i x u + i x v p c 2 compute inner product c 1 t T 1 t 2 = cos t 1 t 2 49
50 Angles on Surface Curve [u(t),v(t)] surface x(u, v) in uv-plane defines curve on the c(t) = x(u(t),v(t)) Two curves c 1 and c 2 intersecting at p t T 1 t 2 = ( 1 x u + 1 x v ) T ( 2 x u + 2 x v ) = 1 2 x T u x u +( ) x T u x v x T v x v = ( 1, 1 ) x T u x u x T u x v x T u x v x T v x v
51 First Fundamental Form First fundamental form I = E F F G := xt u x u x T u x v x T u x v x T v x v Defines inner product on tangent space 1 1, 2 2 := 1 1 T I
52 First Fundamental Form First fundamental form (w.r.t. surface metric) I allows to measure! Angles t > 1 t 2 = h( 1, 1), ( 2, 2)i Length ds 2 = (du, dv), (du, dv) = Edu 2 +2F dudv + Gdv 2 squared! infinitesimal! length Area infinitesimal! Area da = x u x v du dv = x T u x u x T v x v (x T u x v ) 2 du dv = EG F 2 du dv cross product determinant with unit vectors area 52
53 Sphere Example Spherical parameterization x(u, v) = cos u sin v sin u sin v cos v, (u, v) [0, 2 ) [0, ) Tangent vectors x u (u, v) = sin u sin v cos u sin v 0 x v (u, v) = cos u cos v sin u cos v sin v First fundamental Form I = sin 2 v
54 Sphere Example Length of equator x(t, /2) 0 2 1ds = 0 2 E (u t ) 2 +2Fu t v t + G (v t ) 2 dt = 0 2 sin v dt = 2 sin v = 2 54

55 Sphere Example Area of a sphere dA = EG F 2 du dv = sin v du dv = 4 55
56 Normal Curvature Tangent vector t n x u x v t p t = cos φ x u x u + sin φ x v x v unit vector 56
57 Normal Curvature defines intersection plane, yielding curve c(t) normal curve n t p c(t) t = cos φ x u x u + sin φ x v x v 57


58 Geometry of the Normal Gauss map!!!! normal at point consider curve in surface again study its curvature at p normal tilts along curve 58
59 Normal Curvature Normal curvature apple n (t) is defined as curvature of the normal curve c(t) at point p(t) =x(u, v) With second fundamental form II = e f x T uu n := f g x T uvn x T uvn x T vvn normal curvature can be computed as n( t) = t T II t t T I t = ea2 +2fab + gb 2 t = ax u + bx v Ea 2 +2Fab + Gb 2 t = (a, b) 59

60 Surface Curvature(s) Principal curvatures! Maximum curvature Minimum curvature Euler theorem κ 1 = max Corresponding principal directions, are orthogonal φ κ n(φ) κ 2 = min κ n (φ) φ n( ) = 1 cos sin 2 e 1 e 2 60
61 Surface Curvature(s) Principal curvatures! Maximum curvature Minimum curvature Euler theorem κ 1 = max Corresponding principal directions, are orthogonal φ κ n(φ) κ 2 = min κ n (φ) φ n( ) = 1 cos sin 2 e 1 e 2 Special curvatures! Mean curvature Gaussian curvature H = K = κ 1 κ 2 extrinsic intrinsic (only first FF) 61
62 Invariants Gaussian and mean curvature!!!! determinant and trace only eigenvalues and orthovectors 62
63 Mean Curvature Integral representations 63

64 Curvature of Surfaces Mean curvature! H = H =0 everywhere! minimal surface soap film 64


65 Curvature of Surfaces Mean curvature! H = H =0 everywhere! minimal surface Green Void, Sydney Architects: Lava 65



66 Curvature of Surfaces Gaussian curvature! K = κ 1 κ 2 K =0everywhere! developable surface surface that can be flattened to a plane without distortion (stretching or compression) Disney, Concert Hall, L.A. Architects: Gehry Partners Timber Fabric IBOIS, EPFL 66
67 Shape Operator Derivative of Gauss map! second fundamental form!!! local coordinates 67
68 Intrinsic Geometry Properties of the surface that only depend on the! first fundamental form! length angles Gaussian curvature (Theorema Egregium) remarkable theorem (Gauss) K = lim r 0 6πr 3C(r) πr 3 Gaussian curvature of a surface is invariant under local isometry 68
69 Classification Point x on the surface is called! elliptic, if K>0 hyperbolic, if parabolic, if K<0 K =0 Gaussian curvature K umbilic, if κ 1 = κ 2 or isotropic 69

70 Classification Point x on the surface is called 70

 = Z K( ) = Z K( ) =")
71 Gauss-Bonnet Theorem For any closed manifold surface with Euler characteristic =2 2g Z K =2 Z K( ) = Z K( ) = Z K( ) = 4 71

72 Gauss-Bonnet Theorem Sphere 1 = 2 =1/r K = 1 2 =1/r 2 Z K =4 r 2 1 r 2 =4 when sphere is deformed, new positive and negative curvature cancel out 72


73 Differential Operators Gradient!! @x n! points in the direction of the steepest ascend 73
74 Differential Operators Divergence!!! divf = r F 1 n volume density of outward flux of vector field magnitude of source or sink at given point Example: incompressible fluid velocity field is divergence-free 74
75 Differential Operators Divergence divf = r F 1 n high divergence low divergence 75
76 Laplace Operator Laplace operator gradient operator 2nd partial derivatives f = div f = i x 2 i 2 f function in Euclidean space divergence operator Cartesian coordinates 76
77 Laplace-Beltrami Operator Extension of Laplace fo functions on manifolds Laplace- Beltrami gradient operator of the surface S f = div S S f function on manifold S divergence operator Laplace on the surface 77
78 Laplace-Beltrami Operator Laplace- Beltrami gradient operator mean curvature S x = div S S x = 2Hn function on manifold S divergence operator surface normal 78
79 Literature M. Do Carmo: Differential Geometry of Curves and Surfaces, Prentice Hall, 1976 A. Pressley: Elementary Differential Geometry, Springer, 2010 G. Farin: Curves and Surfaces for CAGD, Morgan Kaufmann, 2001 W. Boehm, H. Prautzsch: Geometric Concepts for Geometric Design, AK Peters 1994 H. Prautzsch, W. Boehm, M. Paluszny: Bézier and B-Spline Techniques, Springer 2002 ddg.cs.columbia.edu 79

80 Next Time Discrete Differential Geometry 80
81 Thanks! 81
Dierential Geometry Curves and surfaces Local properties Geometric foundations (critical for visual modeling and computing) Quantitative analysis Algo
 Quantitative analysis Algo") Dierential Geometry Curves and surfaces Local properties Geometric foundations (critical for visual modeling and computing) Quantitative analysis Algorithm development Shape control and interrogation Curves
Dierential Geometry Curves and surfaces Local properties Geometric foundations (critical for visual modeling and computing) Quantitative analysis Algorithm development Shape control and interrogation Curves
Geometric Modelling Summer 2016
 Geometric Modelling Summer 2016 Exercises Benjamin Karer M.Sc. http://gfx.uni-kl.de/~gm Benjamin Karer M.Sc. Geometric Modelling Summer 2016 1 Dierential Geometry Benjamin Karer M.Sc. Geometric Modelling
Geometric Modelling Summer 2016 Exercises Benjamin Karer M.Sc. http://gfx.uni-kl.de/~gm Benjamin Karer M.Sc. Geometric Modelling Summer 2016 1 Dierential Geometry Benjamin Karer M.Sc. Geometric Modelling
Chapter 14. Basics of The Differential Geometry of Surfaces. Introduction. Parameterized Surfaces. The First... Home Page. Title Page.
 Chapter 14 Basics of The Differential Geometry of Surfaces Page 649 of 681 14.1. Almost all of the material presented in this chapter is based on lectures given by Eugenio Calabi in an upper undergraduate
Chapter 14 Basics of The Differential Geometry of Surfaces Page 649 of 681 14.1. Almost all of the material presented in this chapter is based on lectures given by Eugenio Calabi in an upper undergraduate
1 The Differential Geometry of Surfaces
 1 The Differential Geometry of Surfaces Three-dimensional objects are bounded by surfaces. This section reviews some of the basic definitions and concepts relating to the geometry of smooth surfaces. 1.1
1 The Differential Geometry of Surfaces Three-dimensional objects are bounded by surfaces. This section reviews some of the basic definitions and concepts relating to the geometry of smooth surfaces. 1.1
Topics. CS Advanced Computer Graphics. Differential Geometry Basics. James F. O Brien. Vector and Tensor Fields.
 CS 94-3 Advanced Computer Graphics Differential Geometry Basics James F. O Brien Associate Professor U.C. Berkeley Topics Vector and Tensor Fields Divergence, curl, etc. Parametric Curves Tangents, curvature,
CS 94-3 Advanced Computer Graphics Differential Geometry Basics James F. O Brien Associate Professor U.C. Berkeley Topics Vector and Tensor Fields Divergence, curl, etc. Parametric Curves Tangents, curvature,
SELECTED SAMPLE FINAL EXAM SOLUTIONS - MATH 5378, SPRING 2013
 SELECTED SAMPLE FINAL EXAM SOLUTIONS - MATH 5378, SPRING 03 Problem (). This problem is perhaps too hard for an actual exam, but very instructional, and simpler problems using these ideas will be on the
SELECTED SAMPLE FINAL EXAM SOLUTIONS - MATH 5378, SPRING 03 Problem (). This problem is perhaps too hard for an actual exam, but very instructional, and simpler problems using these ideas will be on the
Lectures in Discrete Differential Geometry 2 Surfaces
 Lectures in Discrete Differential Geometry 2 Surfaces Etienne Vouga February 4, 24 Smooth Surfaces in R 3 In this section we will review some properties of smooth surfaces R 3. We will assume that is parameterized
Lectures in Discrete Differential Geometry 2 Surfaces Etienne Vouga February 4, 24 Smooth Surfaces in R 3 In this section we will review some properties of smooth surfaces R 3. We will assume that is parameterized
MATH 332: Vector Analysis Summer 2005 Homework
 MATH 332, (Vector Analysis), Summer 2005: Homework 1 Instructor: Ivan Avramidi MATH 332: Vector Analysis Summer 2005 Homework Set 1. (Scalar Product, Equation of a Plane, Vector Product) Sections: 1.9,
MATH 332, (Vector Analysis), Summer 2005: Homework 1 Instructor: Ivan Avramidi MATH 332: Vector Analysis Summer 2005 Homework Set 1. (Scalar Product, Equation of a Plane, Vector Product) Sections: 1.9,
HILBERT S THEOREM ON THE HYPERBOLIC PLANE
 HILBET S THEOEM ON THE HYPEBOLIC PLANE MATTHEW D. BOWN Abstract. We recount a proof of Hilbert s result that a complete geometric surface of constant negative Gaussian curvature cannot be isometrically
HILBET S THEOEM ON THE HYPEBOLIC PLANE MATTHEW D. BOWN Abstract. We recount a proof of Hilbert s result that a complete geometric surface of constant negative Gaussian curvature cannot be isometrically
Final Exam Topic Outline
 Math 442 - Differential Geometry of Curves and Surfaces Final Exam Topic Outline 30th November 2010 David Dumas Note: There is no guarantee that this outline is exhaustive, though I have tried to include
Math 442 - Differential Geometry of Curves and Surfaces Final Exam Topic Outline 30th November 2010 David Dumas Note: There is no guarantee that this outline is exhaustive, though I have tried to include
Hyperbolic Geometry on Geometric Surfaces
 Mathematics Seminar, 15 September 2010 Outline Introduction Hyperbolic geometry Abstract surfaces The hemisphere model as a geometric surface The Poincaré disk model as a geometric surface Conclusion Introduction
Mathematics Seminar, 15 September 2010 Outline Introduction Hyperbolic geometry Abstract surfaces The hemisphere model as a geometric surface The Poincaré disk model as a geometric surface Conclusion Introduction
THE FUNDAMENTAL THEOREM OF SPACE CURVES
 THE FUNDAMENTAL THEOREM OF SPACE CURVES JOSHUA CRUZ Abstract. In this paper, we show that curves in R 3 can be uniquely generated by their curvature and torsion. By finding conditions that guarantee the
THE FUNDAMENTAL THEOREM OF SPACE CURVES JOSHUA CRUZ Abstract. In this paper, we show that curves in R 3 can be uniquely generated by their curvature and torsion. By finding conditions that guarantee the
9.1 Mean and Gaussian Curvatures of Surfaces
 Chapter 9 Gauss Map II 9.1 Mean and Gaussian Curvatures of Surfaces in R 3 We ll assume that the curves are in R 3 unless otherwise noted. We start off by quoting the following useful theorem about self
Chapter 9 Gauss Map II 9.1 Mean and Gaussian Curvatures of Surfaces in R 3 We ll assume that the curves are in R 3 unless otherwise noted. We start off by quoting the following useful theorem about self
Lecture 11: Differential Geometry
 Lecture 11: Differential Geometry c Bryan S. Morse, Brigham Young University, 1998 2000 Last modified on February 28, 2000 at 8:45 PM Contents 11.1 Introduction..............................................
Lecture 11: Differential Geometry c Bryan S. Morse, Brigham Young University, 1998 2000 Last modified on February 28, 2000 at 8:45 PM Contents 11.1 Introduction..............................................
CHAPTER 3. Gauss map. In this chapter we will study the Gauss map of surfaces in R 3.
 CHAPTER 3 Gauss map In this chapter we will study the Gauss map of surfaces in R 3. 3.1. Surfaces in R 3 Let S R 3 be a submanifold of dimension 2. Let {U i, ϕ i } be a DS on S. For any p U i we have a
CHAPTER 3 Gauss map In this chapter we will study the Gauss map of surfaces in R 3. 3.1. Surfaces in R 3 Let S R 3 be a submanifold of dimension 2. Let {U i, ϕ i } be a DS on S. For any p U i we have a
Introduction to Algebraic and Geometric Topology Week 14
 Introduction to Algebraic and Geometric Topology Week 14 Domingo Toledo University of Utah Fall 2016 Computations in coordinates I Recall smooth surface S = {f (x, y, z) =0} R 3, I rf 6= 0 on S, I Chart
Introduction to Algebraic and Geometric Topology Week 14 Domingo Toledo University of Utah Fall 2016 Computations in coordinates I Recall smooth surface S = {f (x, y, z) =0} R 3, I rf 6= 0 on S, I Chart
Differential Geometry of Curves
 Differential Geometry of Curves Cartesian coordinate system René Descartes (1596-165) (lat. Renatus Cartesius) French philosopher, mathematician, and scientist. Rationalism y Ego cogito, ergo sum (I think,
Differential Geometry of Curves Cartesian coordinate system René Descartes (1596-165) (lat. Renatus Cartesius) French philosopher, mathematician, and scientist. Rationalism y Ego cogito, ergo sum (I think,
Chapter 4. The First Fundamental Form (Induced Metric)
") Chapter 4. The First Fundamental Form (Induced Metric) We begin with some definitions from linear algebra. Def. Let V be a vector space (over IR). A bilinear form on V is a map of the form B : V V IR which
Chapter 4. The First Fundamental Form (Induced Metric) We begin with some definitions from linear algebra. Def. Let V be a vector space (over IR). A bilinear form on V is a map of the form B : V V IR which
Classical differential geometry of two-dimensional surfaces
 Classical differential geometry of two-dimensional surfaces 1 Basic definitions This section gives an overview of the basic notions of differential geometry for twodimensional surfaces. It follows mainly
Classical differential geometry of two-dimensional surfaces 1 Basic definitions This section gives an overview of the basic notions of differential geometry for twodimensional surfaces. It follows mainly
Math 433 Outline for Final Examination
 Math 433 Outline for Final Examination Richard Koch May 3, 5 Curves From the chapter on curves, you should know. the formula for arc length of a curve;. the definition of T (s), N(s), B(s), and κ(s) for
Math 433 Outline for Final Examination Richard Koch May 3, 5 Curves From the chapter on curves, you should know. the formula for arc length of a curve;. the definition of T (s), N(s), B(s), and κ(s) for
Index. Bertrand mate, 89 bijection, 48 bitangent, 69 Bolyai, 339 Bonnet s Formula, 283 bounded, 48
 Index acceleration, 14, 76, 355 centripetal, 27 tangential, 27 algebraic geometry, vii analytic, 44 angle at a corner, 21 on a regular surface, 170 angle excess, 337 angle of parallelism, 344 angular velocity,
Index acceleration, 14, 76, 355 centripetal, 27 tangential, 27 algebraic geometry, vii analytic, 44 angle at a corner, 21 on a regular surface, 170 angle excess, 337 angle of parallelism, 344 angular velocity,
CALCULUS ON MANIFOLDS. 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M =
 CALCULUS ON MANIFOLDS 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M = a M T am, called the tangent bundle, is itself a smooth manifold, dim T M = 2n. Example 1.
CALCULUS ON MANIFOLDS 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M = a M T am, called the tangent bundle, is itself a smooth manifold, dim T M = 2n. Example 1.
Chapter 5. The Second Fundamental Form
 Chapter 5. The Second Fundamental Form Directional Derivatives in IR 3. Let f : U IR 3 IR be a smooth function defined on an open subset of IR 3. Fix p U and X T p IR 3. The directional derivative of f
Chapter 5. The Second Fundamental Form Directional Derivatives in IR 3. Let f : U IR 3 IR be a smooth function defined on an open subset of IR 3. Fix p U and X T p IR 3. The directional derivative of f
An Introduction to Gaussian Geometry
 Lecture Notes in Mathematics An Introduction to Gaussian Geometry Sigmundur Gudmundsson (Lund University) (version 2.068-16th of November 2017) The latest version of this document can be found at http://www.matematik.lu.se/matematiklu/personal/sigma/
Lecture Notes in Mathematics An Introduction to Gaussian Geometry Sigmundur Gudmundsson (Lund University) (version 2.068-16th of November 2017) The latest version of this document can be found at http://www.matematik.lu.se/matematiklu/personal/sigma/
Solutions for Math 348 Assignment #4 1
 Solutions for Math 348 Assignment #4 1 (1) Do the following: (a) Show that the intersection of two spheres S 1 = {(x, y, z) : (x x 1 ) 2 + (y y 1 ) 2 + (z z 1 ) 2 = r 2 1} S 2 = {(x, y, z) : (x x 2 ) 2
Solutions for Math 348 Assignment #4 1 (1) Do the following: (a) Show that the intersection of two spheres S 1 = {(x, y, z) : (x x 1 ) 2 + (y y 1 ) 2 + (z z 1 ) 2 = r 2 1} S 2 = {(x, y, z) : (x x 2 ) 2
Discrete Differential Geometry. Peter Schröder with help from Eitan Grinspun, Mathieu Desbrun and the rest of the DDG crew.
 Discrete Differential Geometry Peter Schröder with help from Eitan Grinspun, Mathieu Desbrun and the rest of the DDG crew ps@cs.caltech.edu A Bit of History Geometry is the key! studied for centuries Hermann
Discrete Differential Geometry Peter Schröder with help from Eitan Grinspun, Mathieu Desbrun and the rest of the DDG crew ps@cs.caltech.edu A Bit of History Geometry is the key! studied for centuries Hermann
CS Tutorial 5 - Differential Geometry I - Surfaces
 236861 Numerical Geometry of Images Tutorial 5 Differential Geometry II Surfaces c 2009 Parameterized surfaces A parameterized surface X : U R 2 R 3 a differentiable map 1 X from an open set U R 2 to R
236861 Numerical Geometry of Images Tutorial 5 Differential Geometry II Surfaces c 2009 Parameterized surfaces A parameterized surface X : U R 2 R 3 a differentiable map 1 X from an open set U R 2 to R
Math 302 Outcome Statements Winter 2013
 Math 302 Outcome Statements Winter 2013 1 Rectangular Space Coordinates; Vectors in the Three-Dimensional Space (a) Cartesian coordinates of a point (b) sphere (c) symmetry about a point, a line, and a
Math 302 Outcome Statements Winter 2013 1 Rectangular Space Coordinates; Vectors in the Three-Dimensional Space (a) Cartesian coordinates of a point (b) sphere (c) symmetry about a point, a line, and a
Intrinsic Surface Geometry
 Chapter 7 Intrinsic Surface Geometry The second fundamental form of a regular surface M R 3 helps to describe precisely how M sits inside the Euclidean space R 3. The first fundamental form of M, on the
Chapter 7 Intrinsic Surface Geometry The second fundamental form of a regular surface M R 3 helps to describe precisely how M sits inside the Euclidean space R 3. The first fundamental form of M, on the
CURRENT MATERIAL: Vector Calculus.
 Math 275, section 002 (Ultman) Fall 2011 FINAL EXAM REVIEW The final exam will be held on Wednesday 14 December from 10:30am 12:30pm in our regular classroom. You will be allowed both sides of an 8.5 11
Math 275, section 002 (Ultman) Fall 2011 FINAL EXAM REVIEW The final exam will be held on Wednesday 14 December from 10:30am 12:30pm in our regular classroom. You will be allowed both sides of an 8.5 11
Gaussian and Mean Curvatures
 Gaussian and Mean Curvatures (Com S 477/577 Notes) Yan-Bin Jia Oct 31, 2017 We have learned that the two principal curvatures (and vectors) determine the local shape of a point on a surface. One characterizes
Gaussian and Mean Curvatures (Com S 477/577 Notes) Yan-Bin Jia Oct 31, 2017 We have learned that the two principal curvatures (and vectors) determine the local shape of a point on a surface. One characterizes
Curvatures, Invariants and How to Get Them Without (M)Any Derivatives
Any Derivatives") Curvatures, Invariants and How to Get Them Without (M)Any Derivatives Mathieu Desbrun & Peter Schröder 1 Classical Notions Curves arclength parameterization center of osculating ( kissing ) circle (also
Curvatures, Invariants and How to Get Them Without (M)Any Derivatives Mathieu Desbrun & Peter Schröder 1 Classical Notions Curves arclength parameterization center of osculating ( kissing ) circle (also
Exercise 1 (Formula for connection 1-forms) Using the first structure equation, show that
 Using the first structure equation, show that") 1 Stokes s Theorem Let D R 2 be a connected compact smooth domain, so that D is a smooth embedded circle. Given a smooth function f : D R, define fdx dy fdxdy, D where the left-hand side is the integral
1 Stokes s Theorem Let D R 2 be a connected compact smooth domain, so that D is a smooth embedded circle. Given a smooth function f : D R, define fdx dy fdxdy, D where the left-hand side is the integral
Vector Calculus handout
 Vector Calculus handout The Fundamental Theorem of Line Integrals Theorem 1 (The Fundamental Theorem of Line Integrals). Let C be a smooth curve given by a vector function r(t), where a t b, and let f
Vector Calculus handout The Fundamental Theorem of Line Integrals Theorem 1 (The Fundamental Theorem of Line Integrals). Let C be a smooth curve given by a vector function r(t), where a t b, and let f
Math 461 Homework 8. Paul Hacking. November 27, 2018
 Math 461 Homework 8 Paul Hacking November 27, 2018 (1) Let S 2 = {(x, y, z) x 2 + y 2 + z 2 = 1} R 3 be the sphere with center the origin and radius 1. Let N = (0, 0, 1) S 2 be the north pole. Let F :
Math 461 Homework 8 Paul Hacking November 27, 2018 (1) Let S 2 = {(x, y, z) x 2 + y 2 + z 2 = 1} R 3 be the sphere with center the origin and radius 1. Let N = (0, 0, 1) S 2 be the north pole. Let F :
Mathematical Tripos Part IA Lent Term Example Sheet 1. Calculate its tangent vector dr/du at each point and hence find its total length.
 Mathematical Tripos Part IA Lent Term 205 ector Calculus Prof B C Allanach Example Sheet Sketch the curve in the plane given parametrically by r(u) = ( x(u), y(u) ) = ( a cos 3 u, a sin 3 u ) with 0 u
Mathematical Tripos Part IA Lent Term 205 ector Calculus Prof B C Allanach Example Sheet Sketch the curve in the plane given parametrically by r(u) = ( x(u), y(u) ) = ( a cos 3 u, a sin 3 u ) with 0 u
Euler Characteristic of Two-Dimensional Manifolds
 Euler Characteristic of Two-Dimensional Manifolds M. Hafiz Khusyairi August 2008 In this work we will discuss an important notion from topology, namely Euler Characteristic and we will discuss several
Euler Characteristic of Two-Dimensional Manifolds M. Hafiz Khusyairi August 2008 In this work we will discuss an important notion from topology, namely Euler Characteristic and we will discuss several
Math 461 Homework 8 Paul Hacking November 27, 2018
 (1) Let Math 461 Homework 8 Paul Hacking November 27, 2018 S 2 = {(x, y, z) x 2 +y 2 +z 2 = 1} R 3 be the sphere with center the origin and radius 1. Let N = (0, 0, 1) S 2 be the north pole. Let F : S
(1) Let Math 461 Homework 8 Paul Hacking November 27, 2018 S 2 = {(x, y, z) x 2 +y 2 +z 2 = 1} R 3 be the sphere with center the origin and radius 1. Let N = (0, 0, 1) S 2 be the north pole. Let F : S
William P. Thurston. The Geometry and Topology of Three-Manifolds
 William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 00 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 00 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
Math 426H (Differential Geometry) Final Exam April 24, 2006.
 Final Exam April 24, 2006.") Math 426H Differential Geometry Final Exam April 24, 6. 8 8 8 6 1. Let M be a surface and let : [0, 1] M be a smooth loop. Let φ be a 1-form on M. a Suppose φ is exact i.e. φ = df for some f : M R. Show
Math 426H Differential Geometry Final Exam April 24, 6. 8 8 8 6 1. Let M be a surface and let : [0, 1] M be a smooth loop. Let φ be a 1-form on M. a Suppose φ is exact i.e. φ = df for some f : M R. Show
d F = (df E 3 ) E 3. (4.1)
 E 3. (4.1)") 4. The Second Fundamental Form In the last section we developed the theory of intrinsic geometry of surfaces by considering the covariant differential d F, that is, the tangential component of df for a
4. The Second Fundamental Form In the last section we developed the theory of intrinsic geometry of surfaces by considering the covariant differential d F, that is, the tangential component of df for a
CURRENT MATERIAL: Vector Calculus.
 Math 275, section 002 (Ultman) Spring 2012 FINAL EXAM REVIEW The final exam will be held on Wednesday 9 May from 8:00 10:00am in our regular classroom. You will be allowed both sides of two 8.5 11 sheets
Math 275, section 002 (Ultman) Spring 2012 FINAL EXAM REVIEW The final exam will be held on Wednesday 9 May from 8:00 10:00am in our regular classroom. You will be allowed both sides of two 8.5 11 sheets
Tangent and Normal Vectors
 Tangent and Normal Vectors MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Navigation When an observer is traveling along with a moving point, for example the passengers in
Tangent and Normal Vectors MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Navigation When an observer is traveling along with a moving point, for example the passengers in
INDEX 363. Cartesian coordinates 19,20,42, 67, 83 Cartesian tensors 84, 87, 226
 INDEX 363 A Absolute differentiation 120 Absolute scalar field 43 Absolute tensor 45,46,47,48 Acceleration 121, 190, 192 Action integral 198 Addition of systems 6, 51 Addition of tensors 6, 51 Adherence
INDEX 363 A Absolute differentiation 120 Absolute scalar field 43 Absolute tensor 45,46,47,48 Acceleration 121, 190, 192 Action integral 198 Addition of systems 6, 51 Addition of tensors 6, 51 Adherence
Lecture 13 The Fundamental Forms of a Surface
 Lecture 13 The Fundamental Forms of a Surface In the following we denote by F : O R 3 a parametric surface in R 3, F(u, v) = (x(u, v), y(u, v), z(u, v)). We denote partial derivatives with respect to the
Lecture 13 The Fundamental Forms of a Surface In the following we denote by F : O R 3 a parametric surface in R 3, F(u, v) = (x(u, v), y(u, v), z(u, v)). We denote partial derivatives with respect to the
Gradient, Divergence and Curl in Curvilinear Coordinates
 Gradient, Divergence and Curl in Curvilinear Coordinates Although cartesian orthogonal coordinates are very intuitive and easy to use, it is often found more convenient to work with other coordinate systems.
Gradient, Divergence and Curl in Curvilinear Coordinates Although cartesian orthogonal coordinates are very intuitive and easy to use, it is often found more convenient to work with other coordinate systems.
Week 3: Differential Geometry of Curves
 Week 3: Differential Geometry of Curves Introduction We now know how to differentiate and integrate along curves. This week we explore some of the geometrical properties of curves that can be addressed
Week 3: Differential Geometry of Curves Introduction We now know how to differentiate and integrate along curves. This week we explore some of the geometrical properties of curves that can be addressed
Differential Geometry II Lecture 1: Introduction and Motivation
 Differential Geometry II Lecture 1: Introduction and Motivation Robert Haslhofer 1 Content of this lecture This course is on Riemannian geometry and the geometry of submanifol. The goal of this first lecture
Differential Geometry II Lecture 1: Introduction and Motivation Robert Haslhofer 1 Content of this lecture This course is on Riemannian geometry and the geometry of submanifol. The goal of this first lecture
Tangent and Normal Vector - (11.5)
") Tangent and Normal Vector - (.5). Principal Unit Normal Vector Let C be the curve traced out by the vector-valued function rt vector T t r r t t is the unit tangent vector to the curve C. Now define N
Tangent and Normal Vector - (.5). Principal Unit Normal Vector Let C be the curve traced out by the vector-valued function rt vector T t r r t t is the unit tangent vector to the curve C. Now define N
Mo, 12/03: Review Tu, 12/04: 9:40-10:30, AEB 340, study session
 Math 2210-1 Notes of 12/03/2018 Math 2210-1 Fall 2018 Review Remaining Events Fr, 11/30: Starting Review. No study session today. Mo, 12/03: Review Tu, 12/04: 9:40-10:30, AEB 340, study session We, 12/05:
Math 2210-1 Notes of 12/03/2018 Math 2210-1 Fall 2018 Review Remaining Events Fr, 11/30: Starting Review. No study session today. Mo, 12/03: Review Tu, 12/04: 9:40-10:30, AEB 340, study session We, 12/05:
Complete Surfaces of Constant Gaussian Curvature in Euclidean Space R 3.
 Summary of the Thesis in Mathematics by Valentina Monaco Complete Surfaces of Constant Gaussian Curvature in Euclidean Space R 3. Thesis Supervisor Prof. Massimiliano Pontecorvo 19 May, 2011 SUMMARY The
Summary of the Thesis in Mathematics by Valentina Monaco Complete Surfaces of Constant Gaussian Curvature in Euclidean Space R 3. Thesis Supervisor Prof. Massimiliano Pontecorvo 19 May, 2011 SUMMARY The
13.3 Arc Length and Curvature
 13 Vector Functions 13.3 Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. We have defined the length of a plane curve with parametric equations x = f(t),
13 Vector Functions 13.3 Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. We have defined the length of a plane curve with parametric equations x = f(t),
Multiple Integrals and Vector Calculus (Oxford Physics) Synopsis and Problem Sets; Hilary 2015
 Synopsis and Problem Sets; Hilary 2015") Multiple Integrals and Vector Calculus (Oxford Physics) Ramin Golestanian Synopsis and Problem Sets; Hilary 215 The outline of the material, which will be covered in 14 lectures, is as follows: 1. Introduction
Multiple Integrals and Vector Calculus (Oxford Physics) Ramin Golestanian Synopsis and Problem Sets; Hilary 215 The outline of the material, which will be covered in 14 lectures, is as follows: 1. Introduction
Geometry of Curves and Surfaces
 Geometry of Curves and Surfaces Weiyi Zhang Mathematics Institute, University of Warwick September 18, 2014 2 Contents 1 Curves 5 1.1 Course description........................ 5 1.1.1 A bit preparation:
Geometry of Curves and Surfaces Weiyi Zhang Mathematics Institute, University of Warwick September 18, 2014 2 Contents 1 Curves 5 1.1 Course description........................ 5 1.1.1 A bit preparation:
8. THE FARY-MILNOR THEOREM
 Math 501 - Differential Geometry Herman Gluck Tuesday April 17, 2012 8. THE FARY-MILNOR THEOREM The curvature of a smooth curve in 3-space is 0 by definition, and its integral w.r.t. arc length, (s) ds,
Math 501 - Differential Geometry Herman Gluck Tuesday April 17, 2012 8. THE FARY-MILNOR THEOREM The curvature of a smooth curve in 3-space is 0 by definition, and its integral w.r.t. arc length, (s) ds,
Geometry for Physicists
 Hung Nguyen-Schafer Jan-Philip Schmidt Tensor Analysis and Elementary Differential Geometry for Physicists and Engineers 4 i Springer Contents 1 General Basis and Bra-Ket Notation 1 1.1 Introduction to
Hung Nguyen-Schafer Jan-Philip Schmidt Tensor Analysis and Elementary Differential Geometry for Physicists and Engineers 4 i Springer Contents 1 General Basis and Bra-Ket Notation 1 1.1 Introduction to
ON THE RULED SURFACES WHOSE FRAME IS THE BISHOP FRAME IN THE EUCLIDEAN 3 SPACE. 1. Introduction
 International Electronic Journal of Geometry Volume 6 No.2 pp. 110 117 (2013) c IEJG ON THE RULED SURFACES WHOSE FRAME IS THE BISHOP FRAME IN THE EUCLIDEAN 3 SPACE ŞEYDA KILIÇOĞLU, H. HILMI HACISALIHOĞLU
International Electronic Journal of Geometry Volume 6 No.2 pp. 110 117 (2013) c IEJG ON THE RULED SURFACES WHOSE FRAME IS THE BISHOP FRAME IN THE EUCLIDEAN 3 SPACE ŞEYDA KILIÇOĞLU, H. HILMI HACISALIHOĞLU
Vector Calculus, Maths II
 Section A Vector Calculus, Maths II REVISION (VECTORS) 1. Position vector of a point P(x, y, z) is given as + y and its magnitude by 2. The scalar components of a vector are its direction ratios, and represent
Section A Vector Calculus, Maths II REVISION (VECTORS) 1. Position vector of a point P(x, y, z) is given as + y and its magnitude by 2. The scalar components of a vector are its direction ratios, and represent
Notes on Cartan s Method of Moving Frames
 Math 553 σιι June 4, 996 Notes on Cartan s Method of Moving Frames Andrejs Treibergs The method of moving frames is a very efficient way to carry out computations on surfaces Chern s Notes give an elementary
Math 553 σιι June 4, 996 Notes on Cartan s Method of Moving Frames Andrejs Treibergs The method of moving frames is a very efficient way to carry out computations on surfaces Chern s Notes give an elementary
ON OSCULATING, NORMAL AND RECTIFYING BI-NULL CURVES IN R 5 2
 Novi Sad J. Math. Vol. 48, No. 1, 2018, 9-20 https://doi.org/10.30755/nsjom.05268 ON OSCULATING, NORMAL AND RECTIFYING BI-NULL CURVES IN R 5 2 Kazım İlarslan 1, Makoto Sakaki 2 and Ali Uçum 34 Abstract.
Novi Sad J. Math. Vol. 48, No. 1, 2018, 9-20 https://doi.org/10.30755/nsjom.05268 ON OSCULATING, NORMAL AND RECTIFYING BI-NULL CURVES IN R 5 2 Kazım İlarslan 1, Makoto Sakaki 2 and Ali Uçum 34 Abstract.
ν(u, v) = N(u, v) G(r(u, v)) E r(u,v) 3.
 = N(u, v) G(r(u, v)) E r(u,v) 3.") 5. The Gauss Curvature Beyond doubt, the notion of Gauss curvature is of paramount importance in differential geometry. Recall two lessons we have learned so far about this notion: first, the presence
5. The Gauss Curvature Beyond doubt, the notion of Gauss curvature is of paramount importance in differential geometry. Recall two lessons we have learned so far about this notion: first, the presence
Geometric approximation of curves and singularities of secant maps Ghosh, Sunayana
 University of Groningen Geometric approximation of curves and singularities of secant maps Ghosh, Sunayana IMPORTANT NOTE: You are advised to consult the publisher's version (publisher's PDF) if you wish
University of Groningen Geometric approximation of curves and singularities of secant maps Ghosh, Sunayana IMPORTANT NOTE: You are advised to consult the publisher's version (publisher's PDF) if you wish
Differential geometry II
 Differential geometry II Lecture 2 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Intrinsic & extrinsic geometry 2 First
Differential geometry II Lecture 2 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Intrinsic & extrinsic geometry 2 First
Distances, volumes, and integration
 Distances, volumes, and integration Scribe: Aric Bartle 1 Local Shape of a Surface A question that we may ask ourselves is what significance does the second fundamental form play in the geometric characteristics
Distances, volumes, and integration Scribe: Aric Bartle 1 Local Shape of a Surface A question that we may ask ourselves is what significance does the second fundamental form play in the geometric characteristics
Oct : Lecture 15: Surface Integrals and Some Related Theorems
 90 MIT 3.016 Fall 2005 c W.C Carter Lecture 15 Oct. 21 2005: Lecture 15: Surface Integrals and Some Related Theorems Reading: Kreyszig Sections: 9.4 pp:485 90), 9.5 pp:491 495) 9.6 pp:496 505) 9.7 pp:505
90 MIT 3.016 Fall 2005 c W.C Carter Lecture 15 Oct. 21 2005: Lecture 15: Surface Integrals and Some Related Theorems Reading: Kreyszig Sections: 9.4 pp:485 90), 9.5 pp:491 495) 9.6 pp:496 505) 9.7 pp:505
e 2 = e 1 = e 3 = v 1 (v 2 v 3 ) = det(v 1, v 2, v 3 ).
 = det(v 1, v 2, v 3 ).") 3. Frames In 3D space, a sequence of 3 linearly independent vectors v 1, v 2, v 3 is called a frame, since it gives a coordinate system (a frame of reference). Any vector v can be written as a linear combination
3. Frames In 3D space, a sequence of 3 linearly independent vectors v 1, v 2, v 3 is called a frame, since it gives a coordinate system (a frame of reference). Any vector v can be written as a linear combination
DIFFERENTIAL GEOMETRY OF CURVES AND SURFACES 5. The Second Fundamental Form of a Surface
 DIFFERENTIAL GEOMETRY OF CURVES AND SURFACES 5. The Second Fundamental Form of a Surface The main idea of this chapter is to try to measure to which extent a surface S is different from a plane, in other
DIFFERENTIAL GEOMETRY OF CURVES AND SURFACES 5. The Second Fundamental Form of a Surface The main idea of this chapter is to try to measure to which extent a surface S is different from a plane, in other
Unit Speed Curves. Recall that a curve Α is said to be a unit speed curve if
 Unit Speed Curves Recall that a curve Α is said to be a unit speed curve if The reason that we like unit speed curves that the parameter t is equal to arc length; i.e. the value of t tells us how far along
Unit Speed Curves Recall that a curve Α is said to be a unit speed curve if The reason that we like unit speed curves that the parameter t is equal to arc length; i.e. the value of t tells us how far along
Approximation of Circular Arcs by Parametric Polynomials
 Approximation of Circular Arcs by Parametric Polynomials Emil Žagar Lecture on Geometric Modelling at Charles University in Prague December 6th 2017 1 / 44 Outline Introduction Standard Reprezentations
Approximation of Circular Arcs by Parametric Polynomials Emil Žagar Lecture on Geometric Modelling at Charles University in Prague December 6th 2017 1 / 44 Outline Introduction Standard Reprezentations
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
What is a Space Curve?
 What is a Space Curve? A space curve is a smooth map γ : I R R 3. In our analysis of defining the curvature for space curves we will be able to take the inclusion (γ, 0) and have that the curvature of
What is a Space Curve? A space curve is a smooth map γ : I R R 3. In our analysis of defining the curvature for space curves we will be able to take the inclusion (γ, 0) and have that the curvature of
OHSx XM521 Multivariable Differential Calculus: Homework Solutions 14.1
 OHSx XM5 Multivariable Differential Calculus: Homework Solutions 4. (8) Describe the graph of the equation. r = i + tj + (t )k. Solution: Let y(t) = t, so that z(t) = t = y. In the yz-plane, this is just
OHSx XM5 Multivariable Differential Calculus: Homework Solutions 4. (8) Describe the graph of the equation. r = i + tj + (t )k. Solution: Let y(t) = t, so that z(t) = t = y. In the yz-plane, this is just
Gauß Curvature in Terms of the First Fundamental Form
 Math 4530 Supplement March 6, 004 Gauß Curvature in Terms of the First Fundamental Form Andrejs Treibergs Abstract In these notes, we develop acceleration formulae for a general frame for a surface in
Math 4530 Supplement March 6, 004 Gauß Curvature in Terms of the First Fundamental Form Andrejs Treibergs Abstract In these notes, we develop acceleration formulae for a general frame for a surface in
EE2007: Engineering Mathematics II Vector Calculus
 EE2007: Engineering Mathematics II Vector Calculus Ling KV School of EEE, NTU ekvling@ntu.edu.sg Rm: S2-B2b-22 Ver 1.1: Ling KV, October 22, 2006 Ver 1.0: Ling KV, Jul 2005 EE2007/Ling KV/Aug 2006 EE2007:
EE2007: Engineering Mathematics II Vector Calculus Ling KV School of EEE, NTU ekvling@ntu.edu.sg Rm: S2-B2b-22 Ver 1.1: Ling KV, October 22, 2006 Ver 1.0: Ling KV, Jul 2005 EE2007/Ling KV/Aug 2006 EE2007:
Exercise: concepts from chapter 3
 Reading:, Ch 3 1) The natural representation of a curve, c = c(s), satisfies the condition dc/ds = 1, where s is the natural parameter for the curve. a) Describe in words and a sketch what this condition
Reading:, Ch 3 1) The natural representation of a curve, c = c(s), satisfies the condition dc/ds = 1, where s is the natural parameter for the curve. a) Describe in words and a sketch what this condition
Contents. MATH 32B-2 (18W) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables. 1 Multiple Integrals 3. 2 Vector Fields 9
 (L) G. Liu / (TA) A. Zhou Calculus of Several Variables. 1 Multiple Integrals 3. 2 Vector Fields 9") MATH 32B-2 (8W) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables Contents Multiple Integrals 3 2 Vector Fields 9 3 Line and Surface Integrals 5 4 The Classical Integral Theorems 9 MATH 32B-2 (8W)
MATH 32B-2 (8W) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables Contents Multiple Integrals 3 2 Vector Fields 9 3 Line and Surface Integrals 5 4 The Classical Integral Theorems 9 MATH 32B-2 (8W)
Contents. 1. Introduction
 FUNDAMENTAL THEOREM OF THE LOCAL THEORY OF CURVES KAIXIN WANG Abstract. In this expository paper, we present the fundamental theorem of the local theory of curves along with a detailed proof. We first
FUNDAMENTAL THEOREM OF THE LOCAL THEORY OF CURVES KAIXIN WANG Abstract. In this expository paper, we present the fundamental theorem of the local theory of curves along with a detailed proof. We first
HOMEWORK 2 SOLUTIONS
 HOMEWORK SOLUTIONS MA11: ADVANCED CALCULUS, HILARY 17 (1) Find parametric equations for the tangent line of the graph of r(t) = (t, t + 1, /t) when t = 1. Solution: A point on this line is r(1) = (1,,
HOMEWORK SOLUTIONS MA11: ADVANCED CALCULUS, HILARY 17 (1) Find parametric equations for the tangent line of the graph of r(t) = (t, t + 1, /t) when t = 1. Solution: A point on this line is r(1) = (1,,
SOME EXERCISES IN CHARACTERISTIC CLASSES
 SOME EXERCISES IN CHARACTERISTIC CLASSES 1. GAUSSIAN CURVATURE AND GAUSS-BONNET THEOREM Let S R 3 be a smooth surface with Riemannian metric g induced from R 3. Its Levi-Civita connection can be defined
SOME EXERCISES IN CHARACTERISTIC CLASSES 1. GAUSSIAN CURVATURE AND GAUSS-BONNET THEOREM Let S R 3 be a smooth surface with Riemannian metric g induced from R 3. Its Levi-Civita connection can be defined
Chapter 1. Vector Algebra and Vector Space
 1. Vector Algebra 1.1. Scalars and vectors Chapter 1. Vector Algebra and Vector Space The simplest kind of physical quantity is one that can be completely specified by its magnitude, a single number, together
1. Vector Algebra 1.1. Scalars and vectors Chapter 1. Vector Algebra and Vector Space The simplest kind of physical quantity is one that can be completely specified by its magnitude, a single number, together
HOMEWORK 3 - GEOMETRY OF CURVES AND SURFACES. where ν is the unit normal consistent with the orientation of α (right hand rule).
.") HOMEWORK 3 - GEOMETRY OF CURVES AND SURFACES ANDRÉ NEVES ) If α : I R 2 is a curve on the plane parametrized by arc length and θ is the angle that α makes with the x-axis, show that α t) = dθ dt ν, where
HOMEWORK 3 - GEOMETRY OF CURVES AND SURFACES ANDRÉ NEVES ) If α : I R 2 is a curve on the plane parametrized by arc length and θ is the angle that α makes with the x-axis, show that α t) = dθ dt ν, where
GLOBAL PROPERTIES OF PLANE AND SPACE CURVES
 GLOBAL PROPERTIES OF PLANE AND SPACE CURVES KEVIN YAN Abstract. The purpose of this paper is purely expository. Its goal is to explain basic differential geometry to a general audience without assuming
GLOBAL PROPERTIES OF PLANE AND SPACE CURVES KEVIN YAN Abstract. The purpose of this paper is purely expository. Its goal is to explain basic differential geometry to a general audience without assuming
There is a function, the arc length function s(t) defined by s(t) = It follows that r(t) = p ( s(t) )
 defined by s(t) = It follows that r(t) = p ( s(t) )") MATH 20550 Acceleration, Curvature and Related Topics Fall 2016 The goal of these notes is to show how to compute curvature and torsion from a more or less arbitrary parametrization of a curve. We will
MATH 20550 Acceleration, Curvature and Related Topics Fall 2016 The goal of these notes is to show how to compute curvature and torsion from a more or less arbitrary parametrization of a curve. We will
Gauss Theorem Egregium, Gauss-Bonnet etc. We know that for a simple closed curve in the plane. kds = 2π.
 Gauss Theorem Egregium, Gauss-Bonnet etc. We know that for a simple closed curve in the plane kds = 2π. Now we want to consider a simple closed curve C in a surface S R 3. We suppose C is the boundary
Gauss Theorem Egregium, Gauss-Bonnet etc. We know that for a simple closed curve in the plane kds = 2π. Now we want to consider a simple closed curve C in a surface S R 3. We suppose C is the boundary
M435: INTRODUCTION TO DIFFERENTIAL GEOMETRY
 M435: INTODUCTION TO DIFFNTIAL GOMTY MAK POWLL Contents 7. The Gauss-Bonnet Theorem 1 7.1. Statement of local Gauss-Bonnet theorem 1 7.2. Area of geodesic triangles 2 7.3. Special case of the plane 2 7.4.
M435: INTODUCTION TO DIFFNTIAL GOMTY MAK POWLL Contents 7. The Gauss-Bonnet Theorem 1 7.1. Statement of local Gauss-Bonnet theorem 1 7.2. Area of geodesic triangles 2 7.3. Special case of the plane 2 7.4.
5.2 The Levi-Civita Connection on Surfaces. 1 Parallel transport of vector fields on a surface M
 5.2 The Levi-Civita Connection on Surfaces In this section, we define the parallel transport of vector fields on a surface M, and then we introduce the concept of the Levi-Civita connection, which is also
5.2 The Levi-Civita Connection on Surfaces In this section, we define the parallel transport of vector fields on a surface M, and then we introduce the concept of the Levi-Civita connection, which is also
On the Fundamental Forms of the B-scroll with Null Directrix and Cartan Frame in Minkowskian 3-Space
 Applied Mathematical Sciences, Vol. 9, 015, no. 80, 3957-3965 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.1988/ams.015.5330 On the Fundamental Forms of the B-scroll with Null Directrix and Cartan
Applied Mathematical Sciences, Vol. 9, 015, no. 80, 3957-3965 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.1988/ams.015.5330 On the Fundamental Forms of the B-scroll with Null Directrix and Cartan
(1) Recap of Differential Calculus and Integral Calculus (2) Preview of Calculus in three dimensional space (3) Tools for Calculus 3
 Recap of Differential Calculus and Integral Calculus (2) Preview of Calculus in three dimensional space (3) Tools for Calculus 3") Math 127 Introduction and Review (1) Recap of Differential Calculus and Integral Calculus (2) Preview of Calculus in three dimensional space (3) Tools for Calculus 3 MATH 127 Introduction to Calculus III
Math 127 Introduction and Review (1) Recap of Differential Calculus and Integral Calculus (2) Preview of Calculus in three dimensional space (3) Tools for Calculus 3 MATH 127 Introduction to Calculus III
Green s, Divergence, Stokes: Statements and First Applications
 Math 425 Notes 12: Green s, Divergence, tokes: tatements and First Applications The Theorems Theorem 1 (Divergence (planar version)). Let F be a vector field in the plane. Let be a nice region of the plane
Math 425 Notes 12: Green s, Divergence, tokes: tatements and First Applications The Theorems Theorem 1 (Divergence (planar version)). Let F be a vector field in the plane. Let be a nice region of the plane
Parametric Curves. Calculus 2 Lia Vas
 Calculus Lia Vas Parametric Curves In the past, we mostly worked with curves in the form y = f(x). However, this format does not encompass all the curves one encounters in applications. For example, consider
Calculus Lia Vas Parametric Curves In the past, we mostly worked with curves in the form y = f(x). However, this format does not encompass all the curves one encounters in applications. For example, consider
Introduction to Differential Geometry
 More about Introduction to Differential Geometry Lecture 7 of 10: Dominic Joyce, Oxford University October 2018 EPSRC CDT in Partial Differential Equations foundation module. These slides available at
More about Introduction to Differential Geometry Lecture 7 of 10: Dominic Joyce, Oxford University October 2018 EPSRC CDT in Partial Differential Equations foundation module. These slides available at
(Differential Geometry) Lecture Notes
 Lecture Notes") Evan Chen Fall 2015 This is MIT s undergraduate 18.950, instructed by Xin Zhou. The formal name for this class is Differential Geometry. The permanent URL for this document is http://web.evanchen.cc/ coursework.html,
Evan Chen Fall 2015 This is MIT s undergraduate 18.950, instructed by Xin Zhou. The formal name for this class is Differential Geometry. The permanent URL for this document is http://web.evanchen.cc/ coursework.html,
Topic 5.6: Surfaces and Surface Elements
 Math 275 Notes Topic 5.6: Surfaces and Surface Elements Textbook Section: 16.6 From the Toolbox (what you need from previous classes): Using vector valued functions to parametrize curves. Derivatives of
Math 275 Notes Topic 5.6: Surfaces and Surface Elements Textbook Section: 16.6 From the Toolbox (what you need from previous classes): Using vector valued functions to parametrize curves. Derivatives of
1 Vectors and 3-Dimensional Geometry
 Calculus III (part ): Vectors and 3-Dimensional Geometry (by Evan Dummit, 07, v..55) Contents Vectors and 3-Dimensional Geometry. Functions of Several Variables and 3-Space..................................
Calculus III (part ): Vectors and 3-Dimensional Geometry (by Evan Dummit, 07, v..55) Contents Vectors and 3-Dimensional Geometry. Functions of Several Variables and 3-Space..................................
of all two dimensional curvatures found by considering the intersection of the surface and a plane that contains the surface normal. Or, more simply,
 A Proof that the Divergence of a Surface Normal Is Equal to the Sum of the Principal Curvatures Patience Henson May 5, 000 Motivation In solving problems that include an interface it is often important
A Proof that the Divergence of a Surface Normal Is Equal to the Sum of the Principal Curvatures Patience Henson May 5, 000 Motivation In solving problems that include an interface it is often important
The Divergence Theorem Stokes Theorem Applications of Vector Calculus. Calculus. Vector Calculus (III)
") Calculus Vector Calculus (III) Outline 1 The Divergence Theorem 2 Stokes Theorem 3 Applications of Vector Calculus The Divergence Theorem (I) Recall that at the end of section 12.5, we had rewritten Green
Calculus Vector Calculus (III) Outline 1 The Divergence Theorem 2 Stokes Theorem 3 Applications of Vector Calculus The Divergence Theorem (I) Recall that at the end of section 12.5, we had rewritten Green
Visual interactive differential geometry. Lisbeth Fajstrup and Martin Raussen
 Visual interactive differential geometry Lisbeth Fajstrup and Martin Raussen August 27, 2008 2 Contents 1 Curves in Plane and Space 7 1.1 Vector functions and parametrized curves.............. 7 1.1.1
Visual interactive differential geometry Lisbeth Fajstrup and Martin Raussen August 27, 2008 2 Contents 1 Curves in Plane and Space 7 1.1 Vector functions and parametrized curves.............. 7 1.1.1
Math 32A Discussion Session Week 5 Notes November 7 and 9, 2017
 Math 32A Discussion Session Week 5 Notes November 7 and 9, 2017 This week we want to talk about curvature and osculating circles. You might notice that these notes contain a lot of the same theory or proofs
Math 32A Discussion Session Week 5 Notes November 7 and 9, 2017 This week we want to talk about curvature and osculating circles. You might notice that these notes contain a lot of the same theory or proofs
THE DARBOUX TRIHEDRONS OF REGULAR CURVES ON A REGULAR SURFACE
 International lectronic Journal of eometry Volume 7 No 2 pp 61-71 (2014) c IJ TH DARBOUX TRIHDRONS OF RULAR CURVS ON A RULAR SURFAC MRAH TUNÇ AND MİN OZYILMAZ (Communicated by Levent KULA) Abstract In
International lectronic Journal of eometry Volume 7 No 2 pp 61-71 (2014) c IJ TH DARBOUX TRIHDRONS OF RULAR CURVS ON A RULAR SURFAC MRAH TUNÇ AND MİN OZYILMAZ (Communicated by Levent KULA) Abstract In
INTRODUCTION TO GEOMETRY
 INTRODUCTION TO GEOMETRY ERIKA DUNN-WEISS Abstract. This paper is an introduction to Riemannian and semi-riemannian manifolds of constant sectional curvature. We will introduce the concepts of moving frames,
INTRODUCTION TO GEOMETRY ERIKA DUNN-WEISS Abstract. This paper is an introduction to Riemannian and semi-riemannian manifolds of constant sectional curvature. We will introduce the concepts of moving frames,