B5.6 Nonlinear Systems
|
|
|
- Dwight Knight
- 5 years ago
- Views:
Transcription
1 B5.6 Nonlinear Systems 1. Linear systems Alain Goriely 2018 Mathematical Institute, University of Oxford
2 Table of contents 1. Linear systems 1.1 Differential Equations 1.2 Linear flows 1.3 Linear maps 1
3 What you (should) know from previous courses. Phase plane analysis for two-dimensional continuous systems ẋ = f (x, y) (1) ẏ = g(x, y) (2) Poincaré-Bendixson theorem (fixed points, periodic orbits, homo/heteroclinic orbits) Basic linear algebra (eigenvalues, diagonalisation,...) 2
4 1. Linear systems
5 1. Linear systems 1.1 Differential Equations
6 The problem Consider the linear, autonomous, first-order system of differential equations: {ẋ dx dt = Ax x(0) = x 0 (3) where A M n (R). NB: M n (R) is the set of n n matrices with coefficients in R. Questions: Find the solution Describe the behaviour of the solution close to the fixed point x = 0. 3
7 The matrix exponential Definition 1.1 Let A M n (R), t R, then the matrix exponential is e ta = k=0 t k A k. (4) k! This series is absolutely, uniformly convergent for all t < T. Theorem 1.2 The initial value problem (IVP) has the unique solution {ẋ dx dt = Ax x(t 0 ) = x 0 (5) x(t) = e (t t0)a x(t 0 ). (6) 4
8 The matrix exponential Property: If A = BCB 1, then e ta = Be tc B 1. In particular, if A is semi-simple (i.e. A can be diagonalised), then there exists B such that A = BCB 1, where C = diag(λ 1,..., λ n ), (7) therefore e ta = Bdiag(e λ1t,..., e λnt )B 1 (8) 5
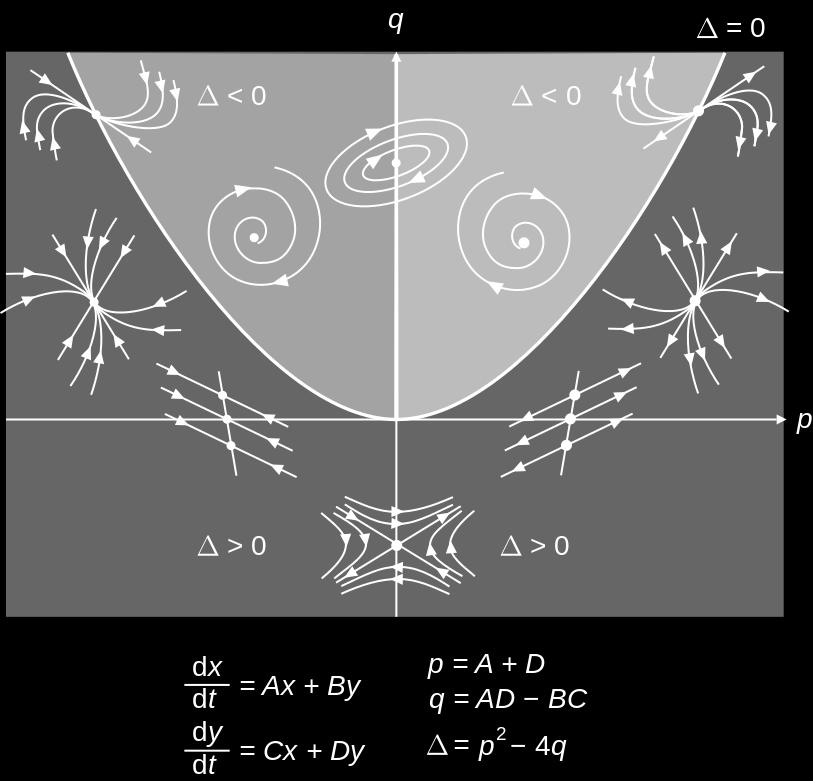
9 2D Example If A M 2 (R), the system is {ẋ1 = a 11 x 1 + a 12 x 2 ẋ 2 = a 21 x 1 + a 22 x 2 (9) where a ij R. Let A = (a ij ) and B GL(2, R). (NB: GL(n, R) is the group of n n invertible matrices with real coefficients) Then y = Bx transforms the system ẋ = Ax into ẏ = Cy, where C = BAB 1. (10) Depending on the eigenvalues λ 1, λ 2 Spec(A) (the spectrum of A), we can choose B such that C has one of the following forms 6
10 2D Example 7
11 2D Example 1 λ 1, λ 2 R 1.1 SADDLE: λ 1λ 2 < 0 8
12 2D Example 1 λ 1, λ 2 R 1.2 NODE: λ 1λ 2 > 0 with A semi-simple (i.e. with 2 different eigenvectors). 9
13 2D Example 1 λ 1, λ 2 R 1.3 DEGENERATE NODE: λ 1 = λ 2 = λ with A not semi-simple (i.e. there exists, up to a multiplicative constant, 1! eigenvector). 10
14 2D Example 2 λ 1, λ 2 C, λ 1 = a + ib (a, b real). 2.1 CENTRE: a = 0 11
15 2D Example 2 λ 1, λ 2 C, λ 1 = a + ib (a, b real). 2.2 FOCUS: a 0 12

16 2D Example 13
17 1. Linear systems 1.2 Linear flows
18 Linear flows Consider ẋ = Ax, x(t 0 ) = x 0. x R, A M n (R), n 1. The general solution is x(t) = e ta x 0. Geometrically, e ta is a map, the linear flow: Properties: ϕ t = e ta : R n R n (11) x(t) = ϕ t (x 0 ) (12) ϕ 0 = 1 (the identity map) ϕ t+s (x) = ϕ t (ϕ s (x)) = ϕ s (ϕ t (x)), x R n 14
19 Hyperbolic flows Consider the set of eigenvalues of A: Spec(A) = {λ 1,..., λ n } (13) Definition 1.3 If A is such that Re(λ) 0, λ Spec(A), then the linear flow e ta is hyperbolic. By extension, the system ẋ = Ax is a hyperbolic system. NB: Since the real part of all the eigenvalues are all different from zero, hyperbolic flows are controlled by exponential contraction or expansion close to the fixed point. 15
20 Invariant sets Consider the set of eigenvalues of A: Spec(A) = {λ 1,..., λ n } (14) Definition 1.4 Let E R n. Then E is an invariant set of ϕ if ϕ t (E) E t R. Example: Let v be an eigenvector of A with eigenvalue λ, then E = Span(v) is an invariant set. Proof: 16
21 Linear subspaces We build different invariant sets based on the real part of the spectrum. First, consider the case where A is semi-simple and Spec(A) = {λ 1,..., λ n }. We write the eigenvalues and eigenvectors of A as { λj = a j + ib j, j = 1,..., n We have Aw j = λ j w j,. w j = u j + iv j, j = 1,..., n (15) Definition 1.5 The stable, center, unstable linear subspaces are defined, respectively, as E s = Span(u j, v j j s.t. a j < 0) E c = Span(u j, v j j s.t. a j = 0) E u = Span(u j, v j j s.t. a j > 0) (stable linear subspace) (centre linear subspace) (unstable linear subspace) 17
22 Linear subspaces Define n s = dim(e s ) n c = dim(e c ) n u = dim(e u ) then n = n s + n c + n u. By construction E s, E c, and E n are invariant sets In the case where the unstable and centre subspaces are empty, we have: PROPERTY: If all the eigenvalues have negative real part, then x 0 R n, the origin is stable. That is, we have lim t eta x 0 = 0 (16) and x 0 0 lim t eta x 0 = (17) NB: This property remains true x 0 E s. 18
23 Linear subspaces If A is not semi-simple, then we take w j to be the generalized eigenvectors (See Perko, p.33). For a degenerate eigenvalue λ with multiplicity m, the generalized eigenvectors of A given by m linearly independent solutions of (A λ1) k w = 0, k = 1,..., m. (18) These generalized eigenvectors form a basis of the eigenspace of eigenvalue λ. 19
24 Linear subspaces Example 1: Let A = (19) 20
25 Linear subspaces Example 2: Let A = (20) 21
26 Linear subspaces Example 3: Let A = [ ] (21) 22
27 1. Linear systems 1.3 Linear maps
28 Linear maps Another type of dynamical system is characterised by discrete iterations. In the linear case: x n+1 = Bx n, B M n (R), n Z +, x 0 R n. (22) If 0 Spec(B), then B can be inverted and orbits are unique. 23
29 Linear maps The stability of fixed points is also given by the spectral properties of B. Let { λj = a j + ib j, λ j Spec(B) w j = u j + iv j, u j, v j R n (23) Then, we define, the stable, unstable, centre linear subspaces as E s = Span(u j, v j j s.t. λ j < 1) E c = Span(u j, v j j s.t. λ j = 1) E u = Span(u j, v j j s.t. λ j > 1) (stable linear subspace) (centre linear subspace) (unstable linear subspace) 24
30 Linear maps The stable linear subspace defines contraction mappings: Let x 0 E s then α < 1, c > 0 such that x n cα n x 0 (24) NB: There is a natural correspondence between linear flows and linear maps. Every linear flow defines a linear map. Consider a linear flow with matrix A. Fix t and define B = e ta, then ϕ t (x n ) : x n Bx n. (25) However, the converse is not true (can you give a counter-example?). 25
31 Extra reading material These notes only cover the material given in lectures. For students who want more details, proofs and examples, I recommend the following books: [S ] Strogatz, Nonlinear Dynamics and Chaos with Applications to Physics, Biology, Chemistry and Engineering (Westview Press, 2000). [D ] Drazin, Nonlinear Systems (Cambridge University Press, Cambridge, 1992). [P ] Perko, Differential Equations and Dynamical Systems (Second edition, Springer, 1996). Below, I link the subjects seen in class to the different books. I find that Perko has the best examples. 1. Linear Systems 1.1 Fundamental theorems. [P16], Examples in the plane [P20,S145] 1.2 Stability theory [P39] 26
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
Linear ODEs. Existence of solutions to linear IVPs. Resolvent matrix. Autonomous linear systems
 Linear ODEs p. 1 Linear ODEs Existence of solutions to linear IVPs Resolvent matrix Autonomous linear systems Linear ODEs Definition (Linear ODE) A linear ODE is a differential equation taking the form
Linear ODEs p. 1 Linear ODEs Existence of solutions to linear IVPs Resolvent matrix Autonomous linear systems Linear ODEs Definition (Linear ODE) A linear ODE is a differential equation taking the form
Examples include: (a) the Lorenz system for climate and weather modeling (b) the Hodgkin-Huxley system for neuron modeling
 the Lorenz system for climate and weather modeling (b) the Hodgkin-Huxley system for neuron modeling") 1 Introduction Many natural processes can be viewed as dynamical systems, where the system is represented by a set of state variables and its evolution governed by a set of differential equations. Examples
1 Introduction Many natural processes can be viewed as dynamical systems, where the system is represented by a set of state variables and its evolution governed by a set of differential equations. Examples
The goal of this chapter is to study linear systems of ordinary differential equations: dt,..., dx ) T
 T") 1 1 Linear Systems The goal of this chapter is to study linear systems of ordinary differential equations: ẋ = Ax, x(0) = x 0, (1) where x R n, A is an n n matrix and ẋ = dx ( dt = dx1 dt,..., dx ) T n.
1 1 Linear Systems The goal of this chapter is to study linear systems of ordinary differential equations: ẋ = Ax, x(0) = x 0, (1) where x R n, A is an n n matrix and ẋ = dx ( dt = dx1 dt,..., dx ) T n.
Department of Mathematics IIT Guwahati
 Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
Linear Systems Notes for CDS-140a
 Linear Systems Notes for CDS-140a October 27, 2008 1 Linear Systems Before beginning our study of linear dynamical systems, it only seems fair to ask the question why study linear systems? One might hope
Linear Systems Notes for CDS-140a October 27, 2008 1 Linear Systems Before beginning our study of linear dynamical systems, it only seems fair to ask the question why study linear systems? One might hope
Lecture Notes 6: Dynamic Equations Part C: Linear Difference Equation Systems
 University of Warwick, EC9A0 Maths for Economists Peter J. Hammond 1 of 45 Lecture Notes 6: Dynamic Equations Part C: Linear Difference Equation Systems Peter J. Hammond latest revision 2017 September
University of Warwick, EC9A0 Maths for Economists Peter J. Hammond 1 of 45 Lecture Notes 6: Dynamic Equations Part C: Linear Difference Equation Systems Peter J. Hammond latest revision 2017 September
The Higgins-Selkov oscillator
 The Higgins-Selkov oscillator May 14, 2014 Here I analyse the long-time behaviour of the Higgins-Selkov oscillator. The system is ẋ = k 0 k 1 xy 2, (1 ẏ = k 1 xy 2 k 2 y. (2 The unknowns x and y, being
The Higgins-Selkov oscillator May 14, 2014 Here I analyse the long-time behaviour of the Higgins-Selkov oscillator. The system is ẋ = k 0 k 1 xy 2, (1 ẏ = k 1 xy 2 k 2 y. (2 The unknowns x and y, being
7 Planar systems of linear ODE
 7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
Calculus and Differential Equations II
 MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
Construction of Lyapunov functions by validated computation
 Construction of Lyapunov functions by validated computation Nobito Yamamoto 1, Kaname Matsue 2, and Tomohiro Hiwaki 1 1 The University of Electro-Communications, Tokyo, Japan yamamoto@im.uec.ac.jp 2 The
Construction of Lyapunov functions by validated computation Nobito Yamamoto 1, Kaname Matsue 2, and Tomohiro Hiwaki 1 1 The University of Electro-Communications, Tokyo, Japan yamamoto@im.uec.ac.jp 2 The
Summary of topics relevant for the final. p. 1
 Summary of topics relevant for the final p. 1 Outline Scalar difference equations General theory of ODEs Linear ODEs Linear maps Analysis near fixed points (linearization) Bifurcations How to analyze a
Summary of topics relevant for the final p. 1 Outline Scalar difference equations General theory of ODEs Linear ODEs Linear maps Analysis near fixed points (linearization) Bifurcations How to analyze a
Complex Dynamic Systems: Qualitative vs Quantitative analysis
 Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
MA5510 Ordinary Differential Equation, Fall, 2014
 MA551 Ordinary Differential Equation, Fall, 214 9/3/214 Linear systems of ordinary differential equations: Consider the first order linear equation for some constant a. The solution is given by such that
MA551 Ordinary Differential Equation, Fall, 214 9/3/214 Linear systems of ordinary differential equations: Consider the first order linear equation for some constant a. The solution is given by such that
An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems
 An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems Scott Zimmerman MATH181HM: Dynamical Systems Spring 2008 1 Introduction The Hartman-Grobman and Poincaré-Bendixon Theorems
An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems Scott Zimmerman MATH181HM: Dynamical Systems Spring 2008 1 Introduction The Hartman-Grobman and Poincaré-Bendixon Theorems
3 Stability and Lyapunov Functions
 CDS140a Nonlinear Systems: Local Theory 02/01/2011 3 Stability and Lyapunov Functions 3.1 Lyapunov Stability Denition: An equilibrium point x 0 of (1) is stable if for all ɛ > 0, there exists a δ > 0 such
CDS140a Nonlinear Systems: Local Theory 02/01/2011 3 Stability and Lyapunov Functions 3.1 Lyapunov Stability Denition: An equilibrium point x 0 of (1) is stable if for all ɛ > 0, there exists a δ > 0 such
Chapter 7. Canonical Forms. 7.1 Eigenvalues and Eigenvectors
 Chapter 7 Canonical Forms 7.1 Eigenvalues and Eigenvectors Definition 7.1.1. Let V be a vector space over the field F and let T be a linear operator on V. An eigenvalue of T is a scalar λ F such that there
Chapter 7 Canonical Forms 7.1 Eigenvalues and Eigenvectors Definition 7.1.1. Let V be a vector space over the field F and let T be a linear operator on V. An eigenvalue of T is a scalar λ F such that there
1. Find the solution of the following uncontrolled linear system. 2 α 1 1
 Appendix B Revision Problems 1. Find the solution of the following uncontrolled linear system 0 1 1 ẋ = x, x(0) =. 2 3 1 Class test, August 1998 2. Given the linear system described by 2 α 1 1 ẋ = x +
Appendix B Revision Problems 1. Find the solution of the following uncontrolled linear system 0 1 1 ẋ = x, x(0) =. 2 3 1 Class test, August 1998 2. Given the linear system described by 2 α 1 1 ẋ = x +
Modeling and Analysis of Dynamic Systems
 Modeling and Analysis of Dynamic Systems Dr. Guillaume Ducard Fall 2017 Institute for Dynamic Systems and Control ETH Zurich, Switzerland G. Ducard c 1 / 57 Outline 1 Lecture 13: Linear System - Stability
Modeling and Analysis of Dynamic Systems Dr. Guillaume Ducard Fall 2017 Institute for Dynamic Systems and Control ETH Zurich, Switzerland G. Ducard c 1 / 57 Outline 1 Lecture 13: Linear System - Stability
Homogeneous Linear Systems of Differential Equations with Constant Coefficients
 Objective: Solve Homogeneous Linear Systems of Differential Equations with Constant Coefficients dx a x + a 2 x 2 + + a n x n, dx 2 a 2x + a 22 x 2 + + a 2n x n,. dx n = a n x + a n2 x 2 + + a nn x n.
Objective: Solve Homogeneous Linear Systems of Differential Equations with Constant Coefficients dx a x + a 2 x 2 + + a n x n, dx 2 a 2x + a 22 x 2 + + a 2n x n,. dx n = a n x + a n2 x 2 + + a nn x n.
EE222 - Spring 16 - Lecture 2 Notes 1
 EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
TWO DIMENSIONAL FLOWS. Lecture 5: Limit Cycles and Bifurcations
 TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
Linear ODEs. Types of systems. Linear ODEs. Definition (Linear ODE) Linear ODEs. Existence of solutions to linear IVPs.
 Linear ODEs. Existence of solutions to linear IVPs.") Linear ODEs Linear ODEs Existence of solutions to linear IVPs Resolvent matrix Autonomous linear systems p. 1 Linear ODEs Types of systems Definition (Linear ODE) A linear ODE is a ifferential equation
Linear ODEs Linear ODEs Existence of solutions to linear IVPs Resolvent matrix Autonomous linear systems p. 1 Linear ODEs Types of systems Definition (Linear ODE) A linear ODE is a ifferential equation
Problem # Max points possible Actual score Total 120
 FINAL EXAMINATION - MATH 2121, FALL 2017. Name: ID#: Email: Lecture & Tutorial: Problem # Max points possible Actual score 1 15 2 15 3 10 4 15 5 15 6 15 7 10 8 10 9 15 Total 120 You have 180 minutes to
FINAL EXAMINATION - MATH 2121, FALL 2017. Name: ID#: Email: Lecture & Tutorial: Problem # Max points possible Actual score 1 15 2 15 3 10 4 15 5 15 6 15 7 10 8 10 9 15 Total 120 You have 180 minutes to
LINEAR ALGEBRA SUMMARY SHEET.
 LINEAR ALGEBRA SUMMARY SHEET RADON ROSBOROUGH https://intuitiveexplanationscom/linear-algebra-summary-sheet/ This document is a concise collection of many of the important theorems of linear algebra, organized
LINEAR ALGEBRA SUMMARY SHEET RADON ROSBOROUGH https://intuitiveexplanationscom/linear-algebra-summary-sheet/ This document is a concise collection of many of the important theorems of linear algebra, organized
APPPHYS217 Tuesday 25 May 2010
 APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
STABILITY. Phase portraits and local stability
 MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
Problem Set Number 5, j/2.036j MIT (Fall 2014)
") Problem Set Number 5, 18.385j/2.036j MIT (Fall 2014) Rodolfo R. Rosales (MIT, Math. Dept.,Cambridge, MA 02139) Due Fri., October 24, 2014. October 17, 2014 1 Large µ limit for Liénard system #03 Statement:
Problem Set Number 5, 18.385j/2.036j MIT (Fall 2014) Rodolfo R. Rosales (MIT, Math. Dept.,Cambridge, MA 02139) Due Fri., October 24, 2014. October 17, 2014 1 Large µ limit for Liénard system #03 Statement:
LINEAR ALGEBRA QUESTION BANK
 LINEAR ALGEBRA QUESTION BANK () ( points total) Circle True or False: TRUE / FALSE: If A is any n n matrix, and I n is the n n identity matrix, then I n A = AI n = A. TRUE / FALSE: If A, B are n n matrices,
LINEAR ALGEBRA QUESTION BANK () ( points total) Circle True or False: TRUE / FALSE: If A is any n n matrix, and I n is the n n identity matrix, then I n A = AI n = A. TRUE / FALSE: If A, B are n n matrices,
2.10 Saddles, Nodes, Foci and Centers
 2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
1. The Transition Matrix (Hint: Recall that the solution to the linear equation ẋ = Ax + Bu is
 ECE 55, Fall 2007 Problem Set #4 Solution The Transition Matrix (Hint: Recall that the solution to the linear equation ẋ Ax + Bu is x(t) e A(t ) x( ) + e A(t τ) Bu(τ)dτ () This formula is extremely important
ECE 55, Fall 2007 Problem Set #4 Solution The Transition Matrix (Hint: Recall that the solution to the linear equation ẋ Ax + Bu is x(t) e A(t ) x( ) + e A(t τ) Bu(τ)dτ () This formula is extremely important
Differential Equations and Dynamical Systems
 Differential Equations and Dynamical Systems Péter L. Simon Eötvös Loránd University Institute of Mathematics Department of Applied Analysis and Computational Mathematics 2012 Contents 1 Introduction 2
Differential Equations and Dynamical Systems Péter L. Simon Eötvös Loránd University Institute of Mathematics Department of Applied Analysis and Computational Mathematics 2012 Contents 1 Introduction 2
Lotka Volterra Predator-Prey Model with a Predating Scavenger
 Lotka Volterra Predator-Prey Model with a Predating Scavenger Monica Pescitelli Georgia College December 13, 2013 Abstract The classic Lotka Volterra equations are used to model the population dynamics
Lotka Volterra Predator-Prey Model with a Predating Scavenger Monica Pescitelli Georgia College December 13, 2013 Abstract The classic Lotka Volterra equations are used to model the population dynamics
= A(λ, t)x. In this chapter we will focus on the case that the matrix A does not depend on time (so that the ODE is autonomous):
x. In this chapter we will focus on the case that the matrix A does not depend on time (so that the ODE is autonomous):") Chapter 2 Linear autonomous ODEs 2 Linearity Linear ODEs form an important class of ODEs They are characterized by the fact that the vector field f : R m R p R R m is linear at constant value of the parameters
Chapter 2 Linear autonomous ODEs 2 Linearity Linear ODEs form an important class of ODEs They are characterized by the fact that the vector field f : R m R p R R m is linear at constant value of the parameters
Half of Final Exam Name: Practice Problems October 28, 2014
 Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
ODE Homework 1. Due Wed. 19 August 2009; At the beginning of the class
 ODE Homework Due Wed. 9 August 2009; At the beginning of the class. (a) Solve Lẏ + Ry = E sin(ωt) with y(0) = k () L, R, E, ω are positive constants. (b) What is the limit of the solution as ω 0? (c) Is
ODE Homework Due Wed. 9 August 2009; At the beginning of the class. (a) Solve Lẏ + Ry = E sin(ωt) with y(0) = k () L, R, E, ω are positive constants. (b) What is the limit of the solution as ω 0? (c) Is
NORMS ON SPACE OF MATRICES
 NORMS ON SPACE OF MATRICES. Operator Norms on Space of linear maps Let A be an n n real matrix and x 0 be a vector in R n. We would like to use the Picard iteration method to solve for the following system
NORMS ON SPACE OF MATRICES. Operator Norms on Space of linear maps Let A be an n n real matrix and x 0 be a vector in R n. We would like to use the Picard iteration method to solve for the following system
Jordan normal form notes (version date: 11/21/07)
") Jordan normal form notes (version date: /2/7) If A has an eigenbasis {u,, u n }, ie a basis made up of eigenvectors, so that Au j = λ j u j, then A is diagonal with respect to that basis To see this, let
Jordan normal form notes (version date: /2/7) If A has an eigenbasis {u,, u n }, ie a basis made up of eigenvectors, so that Au j = λ j u j, then A is diagonal with respect to that basis To see this, let
Poincaré Map, Floquet Theory, and Stability of Periodic Orbits
 Poincaré Map, Floquet Theory, and Stability of Periodic Orbits CDS140A Lecturer: W.S. Koon Fall, 2006 1 Poincaré Maps Definition (Poincaré Map): Consider ẋ = f(x) with periodic solution x(t). Construct
Poincaré Map, Floquet Theory, and Stability of Periodic Orbits CDS140A Lecturer: W.S. Koon Fall, 2006 1 Poincaré Maps Definition (Poincaré Map): Consider ẋ = f(x) with periodic solution x(t). Construct
MATH 304 Linear Algebra Lecture 20: The Gram-Schmidt process (continued). Eigenvalues and eigenvectors.
. Eigenvalues and eigenvectors.") MATH 304 Linear Algebra Lecture 20: The Gram-Schmidt process (continued). Eigenvalues and eigenvectors. Orthogonal sets Let V be a vector space with an inner product. Definition. Nonzero vectors v 1,v
MATH 304 Linear Algebra Lecture 20: The Gram-Schmidt process (continued). Eigenvalues and eigenvectors. Orthogonal sets Let V be a vector space with an inner product. Definition. Nonzero vectors v 1,v
Diagonalization. P. Danziger. u B = A 1. B u S.
 7., 8., 8.2 Diagonalization P. Danziger Change of Basis Given a basis of R n, B {v,..., v n }, we have seen that the matrix whose columns consist of these vectors can be thought of as a change of basis
7., 8., 8.2 Diagonalization P. Danziger Change of Basis Given a basis of R n, B {v,..., v n }, we have seen that the matrix whose columns consist of these vectors can be thought of as a change of basis
x 3y 2z = 6 1.2) 2x 4y 3z = 8 3x + 6y + 8z = 5 x + 3y 2z + 5t = 4 1.5) 2x + 8y z + 9t = 9 3x + 5y 12z + 17t = 7
 2x 4y 3z = 8 3x + 6y + 8z = 5 x + 3y 2z + 5t = 4 1.5) 2x + 8y z + 9t = 9 3x + 5y 12z + 17t = 7") Linear Algebra and its Applications-Lab 1 1) Use Gaussian elimination to solve the following systems x 1 + x 2 2x 3 + 4x 4 = 5 1.1) 2x 1 + 2x 2 3x 3 + x 4 = 3 3x 1 + 3x 2 4x 3 2x 4 = 1 x + y + 2z = 4 1.4)
Linear Algebra and its Applications-Lab 1 1) Use Gaussian elimination to solve the following systems x 1 + x 2 2x 3 + 4x 4 = 5 1.1) 2x 1 + 2x 2 3x 3 + x 4 = 3 3x 1 + 3x 2 4x 3 2x 4 = 1 x + y + 2z = 4 1.4)
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
11 Chaos in Continuous Dynamical Systems.
 11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
1 Last time: least-squares problems
 MATH Linear algebra (Fall 07) Lecture Last time: least-squares problems Definition. If A is an m n matrix and b R m, then a least-squares solution to the linear system Ax = b is a vector x R n such that
MATH Linear algebra (Fall 07) Lecture Last time: least-squares problems Definition. If A is an m n matrix and b R m, then a least-squares solution to the linear system Ax = b is a vector x R n such that
Def. (a, b) is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)
 is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)") Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
Nonlinear Systems and Control Lecture # 12 Converse Lyapunov Functions & Time Varying Systems. p. 1/1
 Nonlinear Systems and Control Lecture # 12 Converse Lyapunov Functions & Time Varying Systems p. 1/1 p. 2/1 Converse Lyapunov Theorem Exponential Stability Let x = 0 be an exponentially stable equilibrium
Nonlinear Systems and Control Lecture # 12 Converse Lyapunov Functions & Time Varying Systems p. 1/1 p. 2/1 Converse Lyapunov Theorem Exponential Stability Let x = 0 be an exponentially stable equilibrium
Definition: An n x n matrix, "A", is said to be diagonalizable if there exists a nonsingular matrix "X" and a diagonal matrix "D" such that X 1 A X
 DIGONLIZTION Definition: n n x n matrix, "", is said to be diagonalizable if there exists a nonsingular matrix "X" and a diagonal matrix "D" such that X X D. Theorem: n n x n matrix, "", is diagonalizable
DIGONLIZTION Definition: n n x n matrix, "", is said to be diagonalizable if there exists a nonsingular matrix "X" and a diagonal matrix "D" such that X X D. Theorem: n n x n matrix, "", is diagonalizable
Dynamic interpretation of eigenvectors
 EE263 Autumn 2015 S. Boyd and S. Lall Dynamic interpretation of eigenvectors invariant sets complex eigenvectors & invariant planes left eigenvectors modal form discrete-time stability 1 Dynamic interpretation
EE263 Autumn 2015 S. Boyd and S. Lall Dynamic interpretation of eigenvectors invariant sets complex eigenvectors & invariant planes left eigenvectors modal form discrete-time stability 1 Dynamic interpretation
Problem 1: Solving a linear equation
 Math 38 Practice Final Exam ANSWERS Page Problem : Solving a linear equation Given matrix A = 2 2 3 7 4 and vector y = 5 8 9. (a) Solve Ax = y (if the equation is consistent) and write the general solution
Math 38 Practice Final Exam ANSWERS Page Problem : Solving a linear equation Given matrix A = 2 2 3 7 4 and vector y = 5 8 9. (a) Solve Ax = y (if the equation is consistent) and write the general solution
Linearization of Differential Equation Models
 Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
DIAGONALIZABLE LINEAR SYSTEMS AND STABILITY. 1. Algebraic facts. We first recall two descriptions of matrix multiplication.
 DIAGONALIZABLE LINEAR SYSTEMS AND STABILITY. 1. Algebraic facts. We first recall two descriptions of matrix multiplication. Let A be n n, P be n r, given by its columns: P = [v 1 v 2... v r ], where the
DIAGONALIZABLE LINEAR SYSTEMS AND STABILITY. 1. Algebraic facts. We first recall two descriptions of matrix multiplication. Let A be n n, P be n r, given by its columns: P = [v 1 v 2... v r ], where the
MATH 115A: SAMPLE FINAL SOLUTIONS
 MATH A: SAMPLE FINAL SOLUTIONS JOE HUGHES. Let V be the set of all functions f : R R such that f( x) = f(x) for all x R. Show that V is a vector space over R under the usual addition and scalar multiplication
MATH A: SAMPLE FINAL SOLUTIONS JOE HUGHES. Let V be the set of all functions f : R R such that f( x) = f(x) for all x R. Show that V is a vector space over R under the usual addition and scalar multiplication
Diagonalization of Matrix
 of Matrix King Saud University August 29, 2018 of Matrix Table of contents 1 2 of Matrix Definition If A M n (R) and λ R. We say that λ is an eigenvalue of the matrix A if there is X R n \ {0} such that
of Matrix King Saud University August 29, 2018 of Matrix Table of contents 1 2 of Matrix Definition If A M n (R) and λ R. We say that λ is an eigenvalue of the matrix A if there is X R n \ {0} such that
1. Diagonalize the matrix A if possible, that is, find an invertible matrix P and a diagonal
 . Diagonalize the matrix A if possible, that is, find an invertible matrix P and a diagonal 3 9 matrix D such that A = P DP, for A =. 3 4 3 (a) P = 4, D =. 3 (b) P = 4, D =. (c) P = 4 8 4, D =. 3 (d) P
. Diagonalize the matrix A if possible, that is, find an invertible matrix P and a diagonal 3 9 matrix D such that A = P DP, for A =. 3 4 3 (a) P = 4, D =. 3 (b) P = 4, D =. (c) P = 4 8 4, D =. 3 (d) P
MTH 464: Computational Linear Algebra
 MTH 464: Computational Linear Algebra Lecture Outlines Exam 4 Material Prof. M. Beauregard Department of Mathematics & Statistics Stephen F. Austin State University April 15, 2018 Linear Algebra (MTH 464)
MTH 464: Computational Linear Algebra Lecture Outlines Exam 4 Material Prof. M. Beauregard Department of Mathematics & Statistics Stephen F. Austin State University April 15, 2018 Linear Algebra (MTH 464)
Linear Algebra in Actuarial Science: Slides to the lecture
 Linear Algebra in Actuarial Science: Slides to the lecture Fall Semester 2010/2011 Linear Algebra is a Tool-Box Linear Equation Systems Discretization of differential equations: solving linear equations
Linear Algebra in Actuarial Science: Slides to the lecture Fall Semester 2010/2011 Linear Algebra is a Tool-Box Linear Equation Systems Discretization of differential equations: solving linear equations
EML Spring 2012
 Home http://vdol.mae.ufl.edu/eml6934-spring2012/ Page 1 of 2 1/10/2012 Search EML6934 - Spring 2012 Optimal Control Home Instructor Anil V. Rao Office Hours: M, W, F 2:00 PM to 3:00 PM Office: MAE-A, Room
Home http://vdol.mae.ufl.edu/eml6934-spring2012/ Page 1 of 2 1/10/2012 Search EML6934 - Spring 2012 Optimal Control Home Instructor Anil V. Rao Office Hours: M, W, F 2:00 PM to 3:00 PM Office: MAE-A, Room
c Igor Zelenko, Fall
 c Igor Zelenko, Fall 2017 1 18: Repeated Eigenvalues: algebraic and geometric multiplicities of eigenvalues, generalized eigenvectors, and solution for systems of differential equation with repeated eigenvalues
c Igor Zelenko, Fall 2017 1 18: Repeated Eigenvalues: algebraic and geometric multiplicities of eigenvalues, generalized eigenvectors, and solution for systems of differential equation with repeated eigenvalues
1. Matrix multiplication and Pauli Matrices: Pauli matrices are the 2 2 matrices. 1 0 i 0. 0 i
 Problems in basic linear algebra Science Academies Lecture Workshop at PSGRK College Coimbatore, June 22-24, 2016 Govind S. Krishnaswami, Chennai Mathematical Institute http://www.cmi.ac.in/~govind/teaching,
Problems in basic linear algebra Science Academies Lecture Workshop at PSGRK College Coimbatore, June 22-24, 2016 Govind S. Krishnaswami, Chennai Mathematical Institute http://www.cmi.ac.in/~govind/teaching,
Problem set 6 Math 207A, Fall 2011 Solutions. 1. A two-dimensional gradient system has the form
 Problem set 6 Math 207A, Fall 2011 s 1 A two-dimensional gradient sstem has the form x t = W (x,, x t = W (x, where W (x, is a given function (a If W is a quadratic function W (x, = 1 2 ax2 + bx + 1 2
Problem set 6 Math 207A, Fall 2011 s 1 A two-dimensional gradient sstem has the form x t = W (x,, x t = W (x, where W (x, is a given function (a If W is a quadratic function W (x, = 1 2 ax2 + bx + 1 2
ẋ = f(x, y), ẏ = g(x, y), (x, y) D, can only have periodic solutions if (f,g) changes sign in D or if (f,g)=0in D.
, ẏ = g(x, y), (x, y) D, can only have periodic solutions if (f,g) changes sign in D or if (f,g)=0in D.") 4 Periodic Solutions We have shown that in the case of an autonomous equation the periodic solutions correspond with closed orbits in phase-space. Autonomous two-dimensional systems with phase-space R
4 Periodic Solutions We have shown that in the case of an autonomous equation the periodic solutions correspond with closed orbits in phase-space. Autonomous two-dimensional systems with phase-space R
Remark By definition, an eigenvector must be a nonzero vector, but eigenvalue could be zero.
 Sec 6 Eigenvalues and Eigenvectors Definition An eigenvector of an n n matrix A is a nonzero vector x such that A x λ x for some scalar λ A scalar λ is called an eigenvalue of A if there is a nontrivial
Sec 6 Eigenvalues and Eigenvectors Definition An eigenvector of an n n matrix A is a nonzero vector x such that A x λ x for some scalar λ A scalar λ is called an eigenvalue of A if there is a nontrivial
22.2. Applications of Eigenvalues and Eigenvectors. Introduction. Prerequisites. Learning Outcomes
 Applications of Eigenvalues and Eigenvectors 22.2 Introduction Many applications of matrices in both engineering and science utilize eigenvalues and, sometimes, eigenvectors. Control theory, vibration
Applications of Eigenvalues and Eigenvectors 22.2 Introduction Many applications of matrices in both engineering and science utilize eigenvalues and, sometimes, eigenvectors. Control theory, vibration
Lecture Notes for Math 524
 Lecture Notes for Math 524 Dr Michael Y Li October 19, 2009 These notes are based on the lecture notes of Professor James S Muldowney, the books of Hale, Copple, Coddington and Levinson, and Perko They
Lecture Notes for Math 524 Dr Michael Y Li October 19, 2009 These notes are based on the lecture notes of Professor James S Muldowney, the books of Hale, Copple, Coddington and Levinson, and Perko They
Definition (T -invariant subspace) Example. Example
 Example. Example") Eigenvalues, Eigenvectors, Similarity, and Diagonalization We now turn our attention to linear transformations of the form T : V V. To better understand the effect of T on the vector space V, we begin
Eigenvalues, Eigenvectors, Similarity, and Diagonalization We now turn our attention to linear transformations of the form T : V V. To better understand the effect of T on the vector space V, we begin
Final A. Problem Points Score Total 100. Math115A Nadja Hempel 03/23/2017
 Final A Math115A Nadja Hempel 03/23/2017 nadja@math.ucla.edu Name: UID: Problem Points Score 1 10 2 20 3 5 4 5 5 9 6 5 7 7 8 13 9 16 10 10 Total 100 1 2 Exercise 1. (10pt) Let T : V V be a linear transformation.
Final A Math115A Nadja Hempel 03/23/2017 nadja@math.ucla.edu Name: UID: Problem Points Score 1 10 2 20 3 5 4 5 5 9 6 5 7 7 8 13 9 16 10 10 Total 100 1 2 Exercise 1. (10pt) Let T : V V be a linear transformation.
EN Nonlinear Control and Planning in Robotics Lecture 3: Stability February 4, 2015
 EN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 4, 2015 Prof: Marin Kobilarov 0.1 Model prerequisites Consider ẋ = f(t, x). We will make the following basic assumptions
EN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 4, 2015 Prof: Marin Kobilarov 0.1 Model prerequisites Consider ẋ = f(t, x). We will make the following basic assumptions
Constant coefficients systems
 5.3. 2 2 Constant coefficients systems Section Objective(s): Diagonalizable systems. Real Distinct Eigenvalues. Complex Eigenvalues. Non-Diagonalizable systems. 5.3.. Diagonalizable Systems. Remark: We
5.3. 2 2 Constant coefficients systems Section Objective(s): Diagonalizable systems. Real Distinct Eigenvalues. Complex Eigenvalues. Non-Diagonalizable systems. 5.3.. Diagonalizable Systems. Remark: We
Math 1553, Introduction to Linear Algebra
 Learning goals articulate what students are expected to be able to do in a course that can be measured. This course has course-level learning goals that pertain to the entire course, and section-level
Learning goals articulate what students are expected to be able to do in a course that can be measured. This course has course-level learning goals that pertain to the entire course, and section-level
Part II. Dynamical Systems. Year
 Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 34 Paper 1, Section II 30A Consider the dynamical system where β > 1 is a constant. ẋ = x + x 3 + βxy 2, ẏ = y + βx 2
Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 34 Paper 1, Section II 30A Consider the dynamical system where β > 1 is a constant. ẋ = x + x 3 + βxy 2, ẏ = y + βx 2
University of Sydney MATH3063 LECTURE NOTES
 University of Sydney MATH3063 LECTURE NOTES Shane Leviton 6-7-206 Contents Introduction:... 6 Order of ODE:... 6 Explicit ODEs... 6 Notation:... 7 Example:... 7 Systems of ODEs... 7 Example 0: fx = 0...
University of Sydney MATH3063 LECTURE NOTES Shane Leviton 6-7-206 Contents Introduction:... 6 Order of ODE:... 6 Explicit ODEs... 6 Notation:... 7 Example:... 7 Systems of ODEs... 7 Example 0: fx = 0...
Chapter 6: Orthogonality
 Chapter 6: Orthogonality (Last Updated: November 7, 7) These notes are derived primarily from Linear Algebra and its applications by David Lay (4ed). A few theorems have been moved around.. Inner products
Chapter 6: Orthogonality (Last Updated: November 7, 7) These notes are derived primarily from Linear Algebra and its applications by David Lay (4ed). A few theorems have been moved around.. Inner products
Diagonalization of Matrices
 LECTURE 4 Diagonalization of Matrices Recall that a diagonal matrix is a square n n matrix with non-zero entries only along the diagonal from the upper left to the lower right (the main diagonal) Diagonal
LECTURE 4 Diagonalization of Matrices Recall that a diagonal matrix is a square n n matrix with non-zero entries only along the diagonal from the upper left to the lower right (the main diagonal) Diagonal
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs
 BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
Reduction to the associated homogeneous system via a particular solution
 June PURDUE UNIVERSITY Study Guide for the Credit Exam in (MA 5) Linear Algebra This study guide describes briefly the course materials to be covered in MA 5. In order to be qualified for the credit, one
June PURDUE UNIVERSITY Study Guide for the Credit Exam in (MA 5) Linear Algebra This study guide describes briefly the course materials to be covered in MA 5. In order to be qualified for the credit, one
EK102 Linear Algebra PRACTICE PROBLEMS for Final Exam Spring 2016
 EK102 Linear Algebra PRACTICE PROBLEMS for Final Exam Spring 2016 Answer the questions in the spaces provided on the question sheets. You must show your work to get credit for your answers. There will
EK102 Linear Algebra PRACTICE PROBLEMS for Final Exam Spring 2016 Answer the questions in the spaces provided on the question sheets. You must show your work to get credit for your answers. There will
4 Second-Order Systems
 4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
Random linear systems and simulation
 Random linear systems and simulation Bernardo Kulnig Pagnoncelli, Hélio Lopes and Carlos Frederico Borges Palmeira MAT. 8/06 Random linear systems and simulation BERNARDO KULNIG PAGNONCELLI, HÉLIO LOPES
Random linear systems and simulation Bernardo Kulnig Pagnoncelli, Hélio Lopes and Carlos Frederico Borges Palmeira MAT. 8/06 Random linear systems and simulation BERNARDO KULNIG PAGNONCELLI, HÉLIO LOPES
Solutions to Math 53 Math 53 Practice Final
 Solutions to Math 5 Math 5 Practice Final 20 points Consider the initial value problem y t 4yt = te t with y 0 = and y0 = 0 a 8 points Find the Laplace transform of the solution of this IVP b 8 points
Solutions to Math 5 Math 5 Practice Final 20 points Consider the initial value problem y t 4yt = te t with y 0 = and y0 = 0 a 8 points Find the Laplace transform of the solution of this IVP b 8 points
Eigenvectors. Prop-Defn
 Eigenvectors Aim lecture: The simplest T -invariant subspaces are 1-dim & these give rise to the theory of eigenvectors. To compute these we introduce the similarity invariant, the characteristic polynomial.
Eigenvectors Aim lecture: The simplest T -invariant subspaces are 1-dim & these give rise to the theory of eigenvectors. To compute these we introduce the similarity invariant, the characteristic polynomial.
Nonlinear Control. Nonlinear Control Lecture # 2 Stability of Equilibrium Points
 Nonlinear Control Lecture # 2 Stability of Equilibrium Points Basic Concepts ẋ = f(x) f is locally Lipschitz over a domain D R n Suppose x D is an equilibrium point; that is, f( x) = 0 Characterize and
Nonlinear Control Lecture # 2 Stability of Equilibrium Points Basic Concepts ẋ = f(x) f is locally Lipschitz over a domain D R n Suppose x D is an equilibrium point; that is, f( x) = 0 Characterize and
Lecture 1: Systems of linear equations and their solutions
 Lecture 1: Systems of linear equations and their solutions Course overview Topics to be covered this semester: Systems of linear equations and Gaussian elimination: Solving linear equations and applications
Lecture 1: Systems of linear equations and their solutions Course overview Topics to be covered this semester: Systems of linear equations and Gaussian elimination: Solving linear equations and applications
Background Mathematics (2/2) 1. David Barber
 1. David Barber") Background Mathematics (2/2) 1 David Barber University College London Modified by Samson Cheung (sccheung@ieee.org) 1 These slides accompany the book Bayesian Reasoning and Machine Learning. The book and
Background Mathematics (2/2) 1 David Barber University College London Modified by Samson Cheung (sccheung@ieee.org) 1 These slides accompany the book Bayesian Reasoning and Machine Learning. The book and
Math Ordinary Differential Equations
 Math 411 - Ordinary Differential Equations Review Notes - 1 1 - Basic Theory A first order ordinary differential equation has the form x = f(t, x) (11) Here x = dx/dt Given an initial data x(t 0 ) = x
Math 411 - Ordinary Differential Equations Review Notes - 1 1 - Basic Theory A first order ordinary differential equation has the form x = f(t, x) (11) Here x = dx/dt Given an initial data x(t 0 ) = x
MATH 1553, C. JANKOWSKI MIDTERM 3
 MATH 1553, C JANKOWSKI MIDTERM 3 Name GT Email @gatechedu Write your section number (E6-E9) here: Please read all instructions carefully before beginning Please leave your GT ID card on your desk until
MATH 1553, C JANKOWSKI MIDTERM 3 Name GT Email @gatechedu Write your section number (E6-E9) here: Please read all instructions carefully before beginning Please leave your GT ID card on your desk until
Entrance Exam, Differential Equations April, (Solve exactly 6 out of the 8 problems) y + 2y + y cos(x 2 y) = 0, y(0) = 2, y (0) = 4.
 y + 2y + y cos(x 2 y) = 0, y(0) = 2, y (0) = 4.") Entrance Exam, Differential Equations April, 7 (Solve exactly 6 out of the 8 problems). Consider the following initial value problem: { y + y + y cos(x y) =, y() = y. Find all the values y such that the
Entrance Exam, Differential Equations April, 7 (Solve exactly 6 out of the 8 problems). Consider the following initial value problem: { y + y + y cos(x y) =, y() = y. Find all the values y such that the
LMI Methods in Optimal and Robust Control
 LMI Methods in Optimal and Robust Control Matthew M. Peet Arizona State University Lecture 15: Nonlinear Systems and Lyapunov Functions Overview Our next goal is to extend LMI s and optimization to nonlinear
LMI Methods in Optimal and Robust Control Matthew M. Peet Arizona State University Lecture 15: Nonlinear Systems and Lyapunov Functions Overview Our next goal is to extend LMI s and optimization to nonlinear
Lecture 10 - Eigenvalues problem
 Lecture 10 - Eigenvalues problem Department of Computer Science University of Houston February 28, 2008 1 Lecture 10 - Eigenvalues problem Introduction Eigenvalue problems form an important class of problems
Lecture 10 - Eigenvalues problem Department of Computer Science University of Houston February 28, 2008 1 Lecture 10 - Eigenvalues problem Introduction Eigenvalue problems form an important class of problems
Nonlinear differential equations - phase plane analysis
 Nonlinear differential equations - phase plane analysis We consider the general first order differential equation for y(x Revision Q(x, y f(x, y dx P (x, y. ( Curves in the (x, y-plane which satisfy this
Nonlinear differential equations - phase plane analysis We consider the general first order differential equation for y(x Revision Q(x, y f(x, y dx P (x, y. ( Curves in the (x, y-plane which satisfy this
6 Linear Equation. 6.1 Equation with constant coefficients
 6 Linear Equation 6.1 Equation with constant coefficients Consider the equation ẋ = Ax, x R n. This equating has n independent solutions. If the eigenvalues are distinct then the solutions are c k e λ
6 Linear Equation 6.1 Equation with constant coefficients Consider the equation ẋ = Ax, x R n. This equating has n independent solutions. If the eigenvalues are distinct then the solutions are c k e λ
The Big Picture. Discuss Examples of unpredictability. Odds, Stanisław Lem, The New Yorker (1974) Chaos, Scientific American (1986)
 Chaos, Scientific American (1986)") The Big Picture Discuss Examples of unpredictability Odds, Stanisław Lem, The New Yorker (1974) Chaos, Scientific American (1986) Lecture 2: Natural Computation & Self-Organization, Physics 256A (Winter
The Big Picture Discuss Examples of unpredictability Odds, Stanisław Lem, The New Yorker (1974) Chaos, Scientific American (1986) Lecture 2: Natural Computation & Self-Organization, Physics 256A (Winter
Lecture 11: Finish Gaussian elimination and applications; intro to eigenvalues and eigenvectors (1)
") Lecture 11: Finish Gaussian elimination and applications; intro to eigenvalues and eigenvectors (1) Travis Schedler Tue, Oct 18, 2011 (version: Tue, Oct 18, 6:00 PM) Goals (2) Solving systems of equations
Lecture 11: Finish Gaussian elimination and applications; intro to eigenvalues and eigenvectors (1) Travis Schedler Tue, Oct 18, 2011 (version: Tue, Oct 18, 6:00 PM) Goals (2) Solving systems of equations
Applied Dynamical Systems
 Applied Dynamical Systems Recommended Reading: (1) Morris W. Hirsch, Stephen Smale, and Robert L. Devaney. Differential equations, dynamical systems, and an introduction to chaos. Elsevier/Academic Press,
Applied Dynamical Systems Recommended Reading: (1) Morris W. Hirsch, Stephen Smale, and Robert L. Devaney. Differential equations, dynamical systems, and an introduction to chaos. Elsevier/Academic Press,
B. Differential Equations A differential equation is an equation of the form
 B Differential Equations A differential equation is an equation of the form ( n) F[ t; x(, xʹ (, x ʹ ʹ (, x ( ; α] = 0 dx d x ( n) d x where x ʹ ( =, x ʹ ʹ ( =,, x ( = n A differential equation describes
B Differential Equations A differential equation is an equation of the form ( n) F[ t; x(, xʹ (, x ʹ ʹ (, x ( ; α] = 0 dx d x ( n) d x where x ʹ ( =, x ʹ ʹ ( =,, x ( = n A differential equation describes
Polytechnic Institute of NYU MA 2132 Final Practice Answers Fall 2012
 Polytechnic Institute of NYU MA Final Practice Answers Fall Studying from past or sample exams is NOT recommended. If you do, it should be only AFTER you know how to do all of the homework and worksheet
Polytechnic Institute of NYU MA Final Practice Answers Fall Studying from past or sample exams is NOT recommended. If you do, it should be only AFTER you know how to do all of the homework and worksheet
Solutions to homework assignment #7 Math 119B UC Davis, Spring for 1 r 4. Furthermore, the derivative of the logistic map is. L r(x) = r(1 2x).
 = r(1 2x).") Solutions to homework assignment #7 Math 9B UC Davis, Spring 0. A fixed point x of an interval map T is called superstable if T (x ) = 0. Find the value of 0 < r 4 for which the logistic map L r has a
Solutions to homework assignment #7 Math 9B UC Davis, Spring 0. A fixed point x of an interval map T is called superstable if T (x ) = 0. Find the value of 0 < r 4 for which the logistic map L r has a
Autonomous systems. Ordinary differential equations which do not contain the independent variable explicitly are said to be autonomous.
 Autonomous equations Autonomous systems Ordinary differential equations which do not contain the independent variable explicitly are said to be autonomous. i f i(x 1, x 2,..., x n ) for i 1,..., n As you
Autonomous equations Autonomous systems Ordinary differential equations which do not contain the independent variable explicitly are said to be autonomous. i f i(x 1, x 2,..., x n ) for i 1,..., n As you
Chapter 5. Eigenvalues and Eigenvectors
 Chapter 5 Eigenvalues and Eigenvectors Section 5. Eigenvectors and Eigenvalues Motivation: Difference equations A Biology Question How to predict a population of rabbits with given dynamics:. half of the
Chapter 5 Eigenvalues and Eigenvectors Section 5. Eigenvectors and Eigenvalues Motivation: Difference equations A Biology Question How to predict a population of rabbits with given dynamics:. half of the