EFFICIENT KINEMATIC SYNTHESIS OF MULTIBODY SYSTEMS. R. Sancibrian Dpt. of Structural and Mechanical Engineering University of Cantabria Spain
|
|
|
- Cori Lang
- 5 years ago
- Views:
Transcription
1 EFFICIENT KINEMATIC SYNTHESIS OF MULTIBODY SYSTEMS R. Sancibrian Dpt. of Structural and Mechanical Engineering University of Cantabria Spain 1
2 Overview Design of complex mechanical systems Commercial software available Optimal synthesis in mechanical design Problem statement Optimization methods Types of problems encountered Deterministic approaches Hybrid algorithms Design examples 2



 Construction")



3 Design of complex mechanical system Automotive suspension and steering systems Well Known CAE methods Requirements Design rules (Well Known?) Construction machinery Analysis Synthesis Aircraft landing gear Parallel manipulators Design Flaps It is necessary to invent the system before to analyse it Antenna pointing mechanisms 3



4 Commercial Software available ANALYSIS Closed-source packages - Adams - LMS DADS - Working model - SIMPACK - DynaFlexPro - Neweul - SAMCEF Mecano - RecurDyn - etc. SYNTHESIS - SyMec - LINCAGES - Synthetica (Univ. of California, Irvine) - SAM 4
5 Optimal Synthesis in Mechanical Design Optimal synthesis involves the minimization of the objective function according to a set of equations given geometric and functional constraints. Objective: Path generation / function generation / rigid-body guidance Variables: dependent coordinates / design variables Constraints: assembling the mechanism / other functional constraints x d y d Desired path Generated path z 1 x P y P θ 4 δ i δ o L 5 α L 3 L 2 θ 3 θ 5 L 4 θ 1 x 0 y 0 L w T θ 2 x L θ 1 20 θ 1 -π q T 3 4 x4 y4 0 y0 L 1 20 L1 L2 L3 L4 5 Turn centre Direction 5
6 Problem statement x d y d x P y P Desired path Generated path θ 4 The objective function 1 T F qw ( ), w ( ), ( ), 2 g qw w d g qw w d L 5 α L 3 θ θ 5 3 L 4 Assembling constraints L 2 θ 2 q L θ 1 20 θ 1 -π T 3 4 x4 y4 θ 1 x 0 y 0 i i L1cos1 L2cos 20 2 L3cos3 L3cos3 L1sin1 L2sin 20 2i L3sin3 L3sin3 Φ qw, w 0 i xg x0 L1cos1 L2cos 20 2 L5cos 5 yg y0 L1sin1 L2sin 20 2i L5sin 5 d p-1 w T x 0 y0 L 1 20 L1 L2 L3 L4 5 g 4 g 3 g 2 minimize F subject to Φ q w, w 0 and gqw ( ), w 0 qw ( ), w d p d 1 d 2 d 3 Desired path d 4 g p-1 g p Generated path g 1 Constrained non-linear least-square optimization 6
7 Problem statement 7
8 Optimization methods Optimization methods Deterministic Hybrid Stochastic Direct Search Gradient-based Genetic Algorihms Evolutionary Algorithms Constrained Unconstrained - Reasonable efficiency - Accurate - Local search - Depend on the initial guess - Global search - Independent of the initial conditions - Low efficiency and accuracy 8



9 Types of problems encountered g 4 g 3 d p-1 d p d 4 d 1 d d 2 3 g p-1 g p Estimation of the synthesis error g 1 g 2 F p 1 T i i i i 1 T g d g d gd gd 2 2 i 1 Open conf. = 0 Singularities Branch defect Closed conf. 0 Non-assembly problem 9
10 Extensible-link optimization Desired path Desired path Initialization m 6, k 6 l 6, k 6 m 5, k 5 it1;i1 l 5, k 5 l 3, k 3 l 4, k 4 m 2, k 2 m 3, k 3 m 4, k 4 1 min 2 l 2, k 2 l 12, k 12 l 22, k 22 l 11, k11 m 22, k 22 m 12, k 12 m 11, k 11 ii1 itit1 l 21, k 21 m 21, k 21 Main advantages: No assembling constraints. No singularities during the optimization process. Main disadvantages: Lack of accuracy working with complex paths. Assembling problems min 1 2.? Yes End No 10
11 Exact-constraints optimization Desired path x d y d x P y P Generated path θ 4 GRG (Generalized Reduced Gradient) L 5 L 2 θ 2 w T α L 3 θ 3 θ 5 θ 20 L 1 x q T θ 1 -π 3 4 x4 y4 L 4 θ 1 x 0 y 0 0 y0 L 1 20 L1 L2 L3 L4 5 Main advantages: The assembling constraints are always fulfilled. Accuracy in the solution 1 T F qw ( ), w ( ), ( ), 2 g qw w d g qw w d ( ), T ( ), F qw w J g qw w d 0,, gq w w gq w w q w J w q w w Φ q Φ 0 q w w 1 g Φ Φ J q q w Main disadvantages: Singularities appear during the optimization. T 1 T j1 j w w J J J g d 11
12 Formulation of the goal g 4 function d p-1 d p d 1 d 2 d 4 d 3 Translation y g 4 g p-1 g 3 g p g 3 g 2 g 1 1 T F qw ( ), w ( ), ( ), 2 g qw w d g qw w d Fourier Descriptors Synthesis error TRS (Translation, Rotation and Scaling) d p-1 β d d p d 1 g p-1 g p d 2 β g d 3 Rotation g 1 g 2 d 4 x g 4 g 3 Only closed paths All kind of paths Reducing the error between the desired and generated values at the beginning of the iterations. This includes: 1) Translation 2) Rotation 3) Scaling and renumbering the precision points d p-1 d p d 1 d 2 d 3 d 4 Scaling g p-1 g p g 1 g 2 pj1 p ij 2 1 i ijp 1 i g Ag0 d 0 Ag0 d0 Fm, s s s ; j 12,,..., p i1 ipj2 2 12
13 TRS Process Translation Rotation Scaling + renumbering positions Optimization 13
14 Avoiding singularities vs. jumping singularities Avoiding singularities Jumping singularities -e> 0 Pseudoinverse The space of the design variables is insufficiently explored The space of the design variables is insufficiently explored > 0 = 0 > 0 = unexplored region 14
15 Jumping sigularities 15
16 Hybrid algorithm Questions to be answered: 1. When? 2. Who? 3. What? 4. How long? 5. How should individuals be treated after a local search? Local Search (LS) Deterministic Hybrid Evolutionary Algorithm (EA) Stochastic 16
17 Hybrid Algorithm 1 (HA1) Stochastic (EA) Initial population EA operators gen=gen+1 Offspring and fitness evaluation E Selection No Conv.? Yes Local Search Optimal Solution 17
18 Hybrid Algorithm 2 (HA2) Stochastic (EA) Initial population EA operators Deterministic (LS) Size of the population: 50 gen=gen+1 E Offspring TRS Fitness evaluation and Selection No Conv.? Yes Local Search Optimal Solution 18
19 Hybrid Algorithm 3 (HA3) Stochastic (EA) Initial population Size of the population: 50 EA operators Deterministic (LS) gen=gen+1 E Offspring TRS Fitness evaluation and Selection Local Search No Conv.? Yes Optimal Solution 19
20 Hybrid Algorithm 4 (HA4) Stochastic (EA) Initial population EA operators Deterministic (LS) TRS gen=gen+1 E Offspring Fitness evaluation and Selection No Elite? Yes No Conv.? Yes Local Search Optimal Solution 20
21 Results EA HA1 HA2 HA3 HA4



22 Optimal design of a suspension system The objective of suspension systems in road vehicles is to provide comfort and handling. Thus, kinematic parameters must be established defining the relative motion between wheel and chassis. The problem can be tackled using dimensional synthesis techniques. This work was awarded by the American Society of American Engineers (ASME) 22

23 Functional parameters Functional parameters provide the adequate behavior of the suspension system. Camber angle: is the angle between the wheel center plane and the plane vertical to the road. Toe-in angle: the angle between the longitudinal center plane in the vehicle, vertical to the road, and the line intersecting the wheel center plane with the road. Tread width alteration: the lateral displacement of the wheel contact point. w T d d d d y 23
24 Kinematic models e 20 O 2 Upper control arms O 4 l 22 Upper control arm A 2 l 23 O 3 Tie-rod O 2 A 2 A 4 O3 Tie-rod l 33 Steering knuckle l 12 α 20 l 20 l 30 A 3 A 3 Z A 0 l 10 e 1 A 4 α O 10 Y Steering knuckle 1 Y e 10 l l O X 1 A 5 A X 1 A 1 Wheel center plane Lower control arm Wheel center plane Lower control arms P Z O 5 A 0 e 1 A 6 P Double-Wishbone Multilink 24
25 Optimization 25
26 Multilink 26

27 Application to a mechanism for injection machine Injection system Evolutionary and hybrid algorithms were used in the design of die-cast injection mechanism (zamak alloy) θ 3 θ 4 L 3 L 4 L 2 θ 2 α L 5 L 1 θ 1 L 6 x 0 y 0 θ 10 θ 6 x 5 y 5 Initially rapid motion of the slider is necessary, then a slower motion, and finally a fast backward motion when the mould has been filled 27

28 Application to a mechanism for injection machine Injection mechanism Electric motor Desired y d (mm) EA solution y g (mm) Hybrid solution y s (mm) Slider position Desired EA solution Hybrid solution Input link position 28

29 Design of surgical instruments Redesign of laparoscopic instruments optimization techniques. Surgeons in laparoscopic surgery have to bear hard conditions of work. The instruments cause them injuries in hand and arms. So we redesign the surgical instruments to improve their ergonomic characteristics. 29



30 Handle design 30
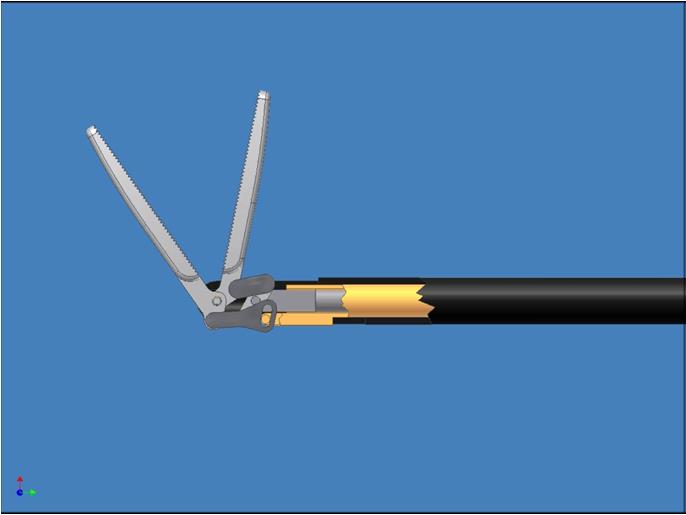
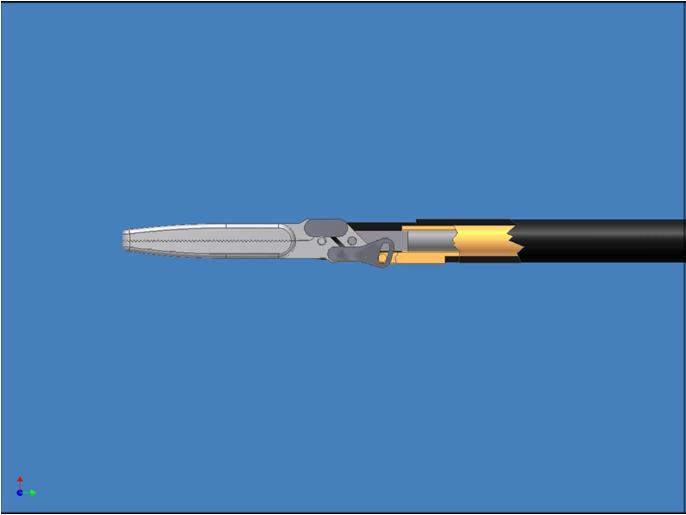
31 Articulated grasper design 31

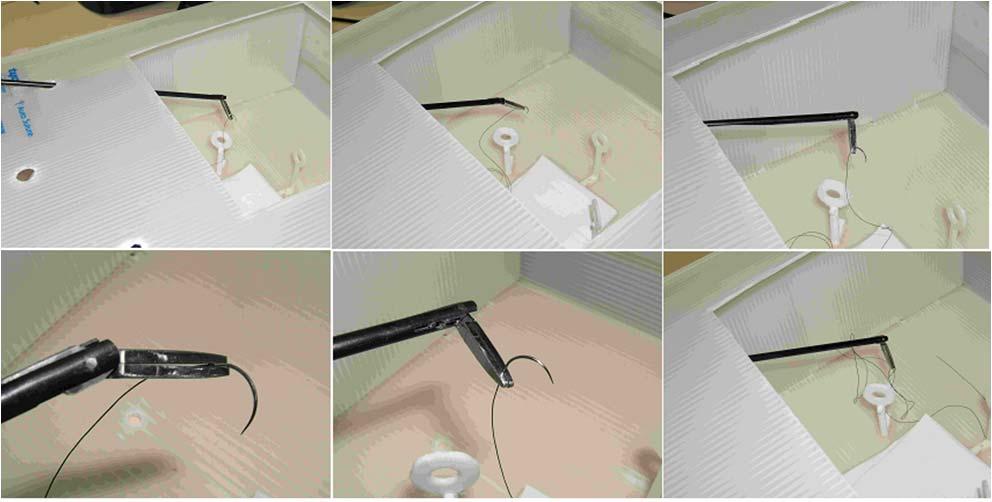

32 Prototype 32
33 Thank you for your attention 33
ANALYSIS OF LOAD PATTERNS IN RUBBER COMPONENTS FOR VEHICLES
 ANALYSIS OF LOAD PATTERNS IN RUBBER COMPONENTS FOR VEHICLES Jerome Merel formerly at Hutchinson Corporate Research Center Israël Wander Apex Technologies Pierangelo Masarati, Marco Morandini Dipartimento
ANALYSIS OF LOAD PATTERNS IN RUBBER COMPONENTS FOR VEHICLES Jerome Merel formerly at Hutchinson Corporate Research Center Israël Wander Apex Technologies Pierangelo Masarati, Marco Morandini Dipartimento
Hybrid neural network bushing model for vehicle dynamics simulation
 Journal of Mechanical Science and Technology 22 (2008) 2365~2374 Journal of Mechanical Science and Technology www.springerlink.com/content/1738-494x DOI 10.1007/s12206-008-0712-2 Hybrid neural network
Journal of Mechanical Science and Technology 22 (2008) 2365~2374 Journal of Mechanical Science and Technology www.springerlink.com/content/1738-494x DOI 10.1007/s12206-008-0712-2 Hybrid neural network
Kinematic Analysis of Four-Link Suspension of Steering Wheel by Means of Equation Sets of Geometrical Constraints with Various Structure
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Kinematic Analysis of Four-Link Suspension of Steering Wheel by Means of Equation Sets of Geometrical Constraints with Various
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Kinematic Analysis of Four-Link Suspension of Steering Wheel by Means of Equation Sets of Geometrical Constraints with Various
Robot Dynamics Instantaneous Kinematiccs and Jacobians
 Robot Dynamics Instantaneous Kinematiccs and Jacobians 151-0851-00 V Lecture: Tuesday 10:15 12:00 CAB G11 Exercise: Tuesday 14:15 16:00 every 2nd week Marco Hutter, Michael Blösch, Roland Siegwart, Konrad
Robot Dynamics Instantaneous Kinematiccs and Jacobians 151-0851-00 V Lecture: Tuesday 10:15 12:00 CAB G11 Exercise: Tuesday 14:15 16:00 every 2nd week Marco Hutter, Michael Blösch, Roland Siegwart, Konrad
Kinematic analysis of MacPherson strut suspension system
 Kinematic analysis of MacPherson strut suspension system Madhu Kodati K. Vikranth Reddy Sandipan Bandyopadhyay IIT Madras IIT Madras IIT Madras Chennai, India Chennai, India Chennai, India Abstract The
Kinematic analysis of MacPherson strut suspension system Madhu Kodati K. Vikranth Reddy Sandipan Bandyopadhyay IIT Madras IIT Madras IIT Madras Chennai, India Chennai, India Chennai, India Abstract The
Lecture «Robot Dynamics» : Kinematics 3
 Lecture «Robot Dynamics» : Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15-12:00, every week exercise: HG G1 Wednesday 8:15-10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics» : Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15-12:00, every week exercise: HG G1 Wednesday 8:15-10:00, according to schedule (about every 2nd week) office hour: LEE
Modelling and Finite Element Analysis of Double Wishbone Suspension
 Modelling and Finite Element Analysis of Double Wishbone Suspension Amol Patil, Varsha Patil, Prashant Uhle P.G. Student, Dept. of Mechanical Engineering, S S B T S College of Engineering, Jalgaon, Maharastra,
Modelling and Finite Element Analysis of Double Wishbone Suspension Amol Patil, Varsha Patil, Prashant Uhle P.G. Student, Dept. of Mechanical Engineering, S S B T S College of Engineering, Jalgaon, Maharastra,
Using the MSC/Nastran Superelement Modal Method to Improve the Accuracy of Predictive Fatigue Loads of a Short and Long Arm Type Rear Suspension
 Using the MSC/Nastran Superelement Modal Method to Improve the Accuracy of Predictive Fatigue Loads of a Short and Long Arm Type Rear Suspension Dr. Hong Zhu, Dr. John Dakin and Ray Pountney, Ford Motor
Using the MSC/Nastran Superelement Modal Method to Improve the Accuracy of Predictive Fatigue Loads of a Short and Long Arm Type Rear Suspension Dr. Hong Zhu, Dr. John Dakin and Ray Pountney, Ford Motor
PLANAR RIGID BODY MOTION: TRANSLATION & ROTATION
 PLANAR RIGID BODY MOTION: TRANSLATION & ROTATION Today s Objectives : Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
PLANAR RIGID BODY MOTION: TRANSLATION & ROTATION Today s Objectives : Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
ON THE OPTIMIZATION OF AN ACKERMANN STEERING LINKAGE
 U.P.B. Sci. Bull., Series D, Vol. 75, Iss. 4, 2013 ISSN 1454-2358 ON THE OPTIMIZATION OF AN ACKERMANN STEERING LINKAGE Aurel P.STOICESCU 1 In the paper the optimization problem of the Ackermann linkage
U.P.B. Sci. Bull., Series D, Vol. 75, Iss. 4, 2013 ISSN 1454-2358 ON THE OPTIMIZATION OF AN ACKERMANN STEERING LINKAGE Aurel P.STOICESCU 1 In the paper the optimization problem of the Ackermann linkage
Dynamic Stress Analysis of a Bus Systems
 Dynamic Stress Analysis of a Bus Systems *H. S. Kim, # Y. S. Hwang, # H. S. Yoon Commercial Vehicle Engineering & Research Center Hyundai Motor Company 772-1, Changduk, Namyang, Whasung, Kyunggi-Do, Korea
Dynamic Stress Analysis of a Bus Systems *H. S. Kim, # Y. S. Hwang, # H. S. Yoon Commercial Vehicle Engineering & Research Center Hyundai Motor Company 772-1, Changduk, Namyang, Whasung, Kyunggi-Do, Korea
acting on a body has two effects:
 The force acting on a body has two effects: the first one is the tendency to push or pull the body in the direction of the force, and the second one is to rotate the body about any fixed axis which does
The force acting on a body has two effects: the first one is the tendency to push or pull the body in the direction of the force, and the second one is to rotate the body about any fixed axis which does
SOP Release. FEV Chassis Reliable Partner in Chassis Development. FEV Chassis Applications and Activities. Concept Layout. Design
 CHASSIS Reliable Partner in Chassis Development FEV Chassis Applications and Activities Founded in 1978, FEV is an internationally recognized leader in the design and development of internal combustion
CHASSIS Reliable Partner in Chassis Development FEV Chassis Applications and Activities Founded in 1978, FEV is an internationally recognized leader in the design and development of internal combustion
Single-track models of an A-double heavy vehicle combination
 Single-track models of an A-double heavy vehicle combination PETER NILSSON KRISTOFFER TAGESSON Department of Applied Mechanics Division of Vehicle Engineering and Autonomous Systems Vehicle Dynamics Group
Single-track models of an A-double heavy vehicle combination PETER NILSSON KRISTOFFER TAGESSON Department of Applied Mechanics Division of Vehicle Engineering and Autonomous Systems Vehicle Dynamics Group
Reduced-order modelling and parameter estimation for a quarter-car suspension system
 81 Reduced-order modelling and parameter estimation for a quarter-car suspension system C Kim and PIRo* Department of Mechanical and Aerospace Engineering, North Carolina State University, Raleigh, North
81 Reduced-order modelling and parameter estimation for a quarter-car suspension system C Kim and PIRo* Department of Mechanical and Aerospace Engineering, North Carolina State University, Raleigh, North
Road Vehicle Dynamics
 Road Vehicle Dynamics Table of Contents: Foreword Preface Chapter 1 Introduction 1.1 General 1.2 Vehicle System Classification 1.3 Dynamic System 1.4 Classification of Dynamic System Models 1.5 Constraints,
Road Vehicle Dynamics Table of Contents: Foreword Preface Chapter 1 Introduction 1.1 General 1.2 Vehicle System Classification 1.3 Dynamic System 1.4 Classification of Dynamic System Models 1.5 Constraints,
Analysis and Design of an Electric Vehicle using Matlab and Simulink
 Analysis and Design of an Electric Vehicle using Matlab and Simulink Advanced Support Group January 22, 29 23-27: University of Michigan Research: Optimal System Partitioning and Coordination Original
Analysis and Design of an Electric Vehicle using Matlab and Simulink Advanced Support Group January 22, 29 23-27: University of Michigan Research: Optimal System Partitioning and Coordination Original
RIGID BODY MOTION (Section 16.1)
") RIGID BODY MOTION (Section 16.1) There are cases where an object cannot be treated as a particle. In these cases the size or shape of the body must be considered. Rotation of the body about its center
RIGID BODY MOTION (Section 16.1) There are cases where an object cannot be treated as a particle. In these cases the size or shape of the body must be considered. Rotation of the body about its center
DESIGN AND ANALYSIS OF LIGHT WEIGHT MOTOR VEHICLE FLYWHEEL M.LAVAKUMAR #1, R.PRASANNA SRINIVAS* 2
 International Journal of Computer Trends and Technology (IJCTT) volume 4 Issue 7 July 013 DESIGN AND ANALYSIS OF LIGHT WEIGHT MOTOR VEHICLE FLYWHEEL M.LAVAKUMAR #1, R.PRASANNA SRINIVAS* 1 Assistant Professor
International Journal of Computer Trends and Technology (IJCTT) volume 4 Issue 7 July 013 DESIGN AND ANALYSIS OF LIGHT WEIGHT MOTOR VEHICLE FLYWHEEL M.LAVAKUMAR #1, R.PRASANNA SRINIVAS* 1 Assistant Professor
Dynamic (Vibrational) and Static Structural Analysis of Ladder Frame
 and Static Structural Analysis of Ladder Frame") Dynamic (Vibrational) and Static Structural Analysis of Ladder Frame Ketan Gajanan Nalawade 1, Ashish Sabu 2, Baskar P 3 School of Mechanical and building science, VIT University, Vellore-632014, Tamil
Dynamic (Vibrational) and Static Structural Analysis of Ladder Frame Ketan Gajanan Nalawade 1, Ashish Sabu 2, Baskar P 3 School of Mechanical and building science, VIT University, Vellore-632014, Tamil
Nonholonomic Constraints Examples
 Nonholonomic Constraints Examples Basilio Bona DAUIN Politecnico di Torino July 2009 B. Bona (DAUIN) Examples July 2009 1 / 34 Example 1 Given q T = [ x y ] T check that the constraint φ(q) = (2x + siny
Nonholonomic Constraints Examples Basilio Bona DAUIN Politecnico di Torino July 2009 B. Bona (DAUIN) Examples July 2009 1 / 34 Example 1 Given q T = [ x y ] T check that the constraint φ(q) = (2x + siny
DOUBLE DEGREE MASTER PROGRAM
 DOUBLE DEGREE MASTER PROGRAM in Engineering Science/Mechanical Engineering at Warsaw University of Technology and Technical University Berlin (WUT/TUB) I SEMESTER COURSE PROGRAM WUT TUB SUBJECT SUBJECT
DOUBLE DEGREE MASTER PROGRAM in Engineering Science/Mechanical Engineering at Warsaw University of Technology and Technical University Berlin (WUT/TUB) I SEMESTER COURSE PROGRAM WUT TUB SUBJECT SUBJECT
DESIGN OF A HIGH SPEED TRAIN USING A MULTIPHYSICAL APPROACH
 DESIGN OF A HIGH SPEED TRAIN USING A MULTIPHYSICAL APPROACH Aitor Berasarte Technologies Management Area Technology Division CAF WHAT DO WE ANALYSE? AERODYNAMICS STRUCTURAL ANALYSIS DYNAMICS NOISE & VIBRATIONS
DESIGN OF A HIGH SPEED TRAIN USING A MULTIPHYSICAL APPROACH Aitor Berasarte Technologies Management Area Technology Division CAF WHAT DO WE ANALYSE? AERODYNAMICS STRUCTURAL ANALYSIS DYNAMICS NOISE & VIBRATIONS
PLANAR RIGID BODY MOTION: TRANSLATION &
 PLANAR RIGID BODY MOTION: TRANSLATION & Today s Objectives : ROTATION Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
PLANAR RIGID BODY MOTION: TRANSLATION & Today s Objectives : ROTATION Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
Double pendulum contact problem
 Applied and Computational Mechanics 8 (214) 115 128 Double pendulum contact problem J. Špička a,,l.hynčík a,m.hajžman a a Faculty of Applied Sciences, University of West Bohemia in Pilsen, Univerzitní
Applied and Computational Mechanics 8 (214) 115 128 Double pendulum contact problem J. Špička a,,l.hynčík a,m.hajžman a a Faculty of Applied Sciences, University of West Bohemia in Pilsen, Univerzitní
Kinematic Synthesis of a Trailing Six-member Mechanism for Automotive Steering
 Kinematic Synthesis of a Trailing Six-member Mechanism for Automotive Steering 1Assistant Professor, College of Military ENGG PUNE, India santiranjan_pramanik@rediffmail.com Abstract S. Pramanik 1 Kinematic
Kinematic Synthesis of a Trailing Six-member Mechanism for Automotive Steering 1Assistant Professor, College of Military ENGG PUNE, India santiranjan_pramanik@rediffmail.com Abstract S. Pramanik 1 Kinematic
DEVIL PHYSICS BADDEST CLASS ON CAMPUS IB PHYSICS
 DEVIL PHYSICS BADDEST CLASS ON CAMPUS IB PHYSICS OPTION B-1A: ROTATIONAL DYNAMICS Essential Idea: The basic laws of mechanics have an extension when equivalent principles are applied to rotation. Actual
DEVIL PHYSICS BADDEST CLASS ON CAMPUS IB PHYSICS OPTION B-1A: ROTATIONAL DYNAMICS Essential Idea: The basic laws of mechanics have an extension when equivalent principles are applied to rotation. Actual
TUTORIAL SHEET 1. magnitude of P and the values of ø and θ. Ans: ø =74 0 and θ= 53 0
 TUTORIAL SHEET 1 1. The rectangular platform is hinged at A and B and supported by a cable which passes over a frictionless hook at E. Knowing that the tension in the cable is 1349N, determine the moment
TUTORIAL SHEET 1 1. The rectangular platform is hinged at A and B and supported by a cable which passes over a frictionless hook at E. Knowing that the tension in the cable is 1349N, determine the moment
Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements
 Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
OPTIMAL DESIGN AND MULTIBODY ANALYSIS OF RZEPPA PILOT-LEVER JOINT
 MULTIBODY DYNAMICS 007, ECCOMAS Thematic Conference C.L. Bottasso, P. Masarati, L. Trainelli (eds.) Milano, Italy, 5 8 June 007 OPTIMAL DESIGN AND MULTIBODY ANALYSIS OF RZEPPA PILOT-LEVER JOINT Ettore
MULTIBODY DYNAMICS 007, ECCOMAS Thematic Conference C.L. Bottasso, P. Masarati, L. Trainelli (eds.) Milano, Italy, 5 8 June 007 OPTIMAL DESIGN AND MULTIBODY ANALYSIS OF RZEPPA PILOT-LEVER JOINT Ettore
VIBRATION ANALYSIS OF E-GLASS FIBRE RESIN MONO LEAF SPRING USED IN LMV
 VIBRATION ANALYSIS OF E-GLASS FIBRE RESIN MONO LEAF SPRING USED IN LMV Mohansing R. Pardeshi 1, Dr. (Prof.) P. K. Sharma 2, Prof. Amit Singh 1 M.tech Research Scholar, 2 Guide & Head, 3 Co-guide & Assistant
VIBRATION ANALYSIS OF E-GLASS FIBRE RESIN MONO LEAF SPRING USED IN LMV Mohansing R. Pardeshi 1, Dr. (Prof.) P. K. Sharma 2, Prof. Amit Singh 1 M.tech Research Scholar, 2 Guide & Head, 3 Co-guide & Assistant
Manipulators. Robotics. Outline. Non-holonomic robots. Sensors. Mobile Robots
 Manipulators P obotics Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity
Manipulators P obotics Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity
A CONTRIBUTION TO SHOCK ABSORBER MODELING BY USING BLACK BOX METHOD
 UNIVERSITY O PITESTI ACULTY O MECHANICS AND TECHNOLOGY SCIENTIIC BULLETIN AUTOMOTIVE series, year XV, no.19, vol. B A CONTRIBUTION TO SHOCK ABSORBER MODELING BY USING BLACK BOX METHOD Prof. dr Giovanni
UNIVERSITY O PITESTI ACULTY O MECHANICS AND TECHNOLOGY SCIENTIIC BULLETIN AUTOMOTIVE series, year XV, no.19, vol. B A CONTRIBUTION TO SHOCK ABSORBER MODELING BY USING BLACK BOX METHOD Prof. dr Giovanni
Chaotic Vibration and Design Criteria for Machine Systems with Clearance Connections
 Proceeding of the Ninth World Congress of the heory of Machines and Mechanism, Sept. 1-3, 1995, Milan, Italy. Chaotic Vibration and Design Criteria for Machine Systems with Clearance Connections Pengyun
Proceeding of the Ninth World Congress of the heory of Machines and Mechanism, Sept. 1-3, 1995, Milan, Italy. Chaotic Vibration and Design Criteria for Machine Systems with Clearance Connections Pengyun
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
Robotics I. Classroom Test November 21, 2014
 Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Design of an Innovative Acoustic Metamaterial
 Design of an Innovative Acoustic Metamaterial PAVLOS MAVROMATIDIS a, ANDREAS KANARACHOS b Electrical Engineering Department a, Mechanical Engineering Department b Frederick University 7 Y. Frederickou
Design of an Innovative Acoustic Metamaterial PAVLOS MAVROMATIDIS a, ANDREAS KANARACHOS b Electrical Engineering Department a, Mechanical Engineering Department b Frederick University 7 Y. Frederickou
4.1 Introduction Issues of applied dynamics CHAPTER 4. DYNAMICS 191
 Chapter 4 Dynamics Dynamics is the branch of mechanics that is concerned with the study of motion and the relation between the forces and motion. The central focus of our study is the dynamics of systems
Chapter 4 Dynamics Dynamics is the branch of mechanics that is concerned with the study of motion and the relation between the forces and motion. The central focus of our study is the dynamics of systems
Neural Network Based Response Surface Methods a Comparative Study
 . LS-DYNA Anwenderforum, Ulm Robustheit / Optimierung II Neural Network Based Response Surface Methods a Comparative Study Wolfram Beyer, Martin Liebscher, Michael Beer, Wolfgang Graf TU Dresden, Germany
. LS-DYNA Anwenderforum, Ulm Robustheit / Optimierung II Neural Network Based Response Surface Methods a Comparative Study Wolfram Beyer, Martin Liebscher, Michael Beer, Wolfgang Graf TU Dresden, Germany
Simulation of the Stick-Slip Friction between Steering Shafts Using ADAMS/PRE
 Simulation of the Stick-Slip Friction between Steering Shafts Using ADAMS/PRE Dexin Wang and Yuting Rui Research & Vehicle Technology Ford Motor Company ABSTRACT Cyclic stick-slip friction is a well-known
Simulation of the Stick-Slip Friction between Steering Shafts Using ADAMS/PRE Dexin Wang and Yuting Rui Research & Vehicle Technology Ford Motor Company ABSTRACT Cyclic stick-slip friction is a well-known
Optimal Design of PM Axial Field Motor Based on PM Radial Field Motor Data
 Optimal Design of PM Axial Field Motor Based on PM Radial Field Motor Data GOGA CVETKOVSKI LIDIJA PETKOVSKA Faculty of Electrical Engineering Ss. Cyril and Methodius University Karpos II b.b. P.O. Box
Optimal Design of PM Axial Field Motor Based on PM Radial Field Motor Data GOGA CVETKOVSKI LIDIJA PETKOVSKA Faculty of Electrical Engineering Ss. Cyril and Methodius University Karpos II b.b. P.O. Box
INFLUENCE OF WHEEL/RAIL CONTACT GEOMETRY ON THE BEHAVIOUR OF A RAILWAY VEHICLE AT STABILITY LIMIT
 ENOC-5, Eindhoven, Netherlands, 7-1 August 5 ID of contribution -36 INFLUENCE OF WHEEL/RAIL CONTACT GEOMETRY ON THE BEHAVIOUR OF A RAILWAY VEHICLE AT STABILITY LIMIT Oldrich Polach Bombardier Transportation
ENOC-5, Eindhoven, Netherlands, 7-1 August 5 ID of contribution -36 INFLUENCE OF WHEEL/RAIL CONTACT GEOMETRY ON THE BEHAVIOUR OF A RAILWAY VEHICLE AT STABILITY LIMIT Oldrich Polach Bombardier Transportation
Stochastic Analogues to Deterministic Optimizers
 Stochastic Analogues to Deterministic Optimizers ISMP 2018 Bordeaux, France Vivak Patel Presented by: Mihai Anitescu July 6, 2018 1 Apology I apologize for not being here to give this talk myself. I injured
Stochastic Analogues to Deterministic Optimizers ISMP 2018 Bordeaux, France Vivak Patel Presented by: Mihai Anitescu July 6, 2018 1 Apology I apologize for not being here to give this talk myself. I injured
Kinematic representation! Iterative methods! Optimization methods
 Human Kinematics Kinematic representation! Iterative methods! Optimization methods Kinematics Forward kinematics! given a joint configuration, what is the position of an end point on the structure?! Inverse
Human Kinematics Kinematic representation! Iterative methods! Optimization methods Kinematics Forward kinematics! given a joint configuration, what is the position of an end point on the structure?! Inverse
A study on wheel force measurement using strain gauge equipped wheels
 A study on wheel force measurement using strain gauge equipped wheels PAVLOS MAVROMATIDIS a, ANDREAS KANARACHOS b Electrical Engineering Department a, Mechanical Engineering Department b Frederick University
A study on wheel force measurement using strain gauge equipped wheels PAVLOS MAVROMATIDIS a, ANDREAS KANARACHOS b Electrical Engineering Department a, Mechanical Engineering Department b Frederick University
Computational and mathematical modeling of an industrialautomobile robot: a multi-purpose case of study
 Issue 2, Volume 5, 2011 91 Computational and mathematical modeling of an industrialautomobile robot: a multi-purpose case of study J. Alejandro Betancur Abstract Nowadays, in automobile industry are found
Issue 2, Volume 5, 2011 91 Computational and mathematical modeling of an industrialautomobile robot: a multi-purpose case of study J. Alejandro Betancur Abstract Nowadays, in automobile industry are found
Evolutionary Multiobjective. Optimization Methods for the Shape Design of Industrial Electromagnetic Devices. P. Di Barba, University of Pavia, Italy
 Evolutionary Multiobjective Optimization Methods for the Shape Design of Industrial Electromagnetic Devices P. Di Barba, University of Pavia, Italy INTRODUCTION Evolutionary Multiobjective Optimization
Evolutionary Multiobjective Optimization Methods for the Shape Design of Industrial Electromagnetic Devices P. Di Barba, University of Pavia, Italy INTRODUCTION Evolutionary Multiobjective Optimization
Surface Interaction Modeling Engineering Methods. Karl Iagnemma, Ph.D. Massachusetts Institute of Technology
 Surface Interaction Modeling Engineering Methods Karl Iagnemma, Ph.D. Massachusetts Institute of Technology 1 Terramechanics Terramechanics Engineering science that studies the interaction between vehicles
Surface Interaction Modeling Engineering Methods Karl Iagnemma, Ph.D. Massachusetts Institute of Technology 1 Terramechanics Terramechanics Engineering science that studies the interaction between vehicles
Simple Car Dynamics. Outline. Claude Lacoursière HPC2N/VRlab, Umeå Universitet, Sweden, May 18, 2005
 Simple Car Dynamics Claude Lacoursière HPC2N/VRlab, Umeå Universitet, Sweden, and CMLabs Simulations, Montréal, Canada May 18, 2005 Typeset by FoilTEX May 16th 2005 Outline basics of vehicle dynamics different
Simple Car Dynamics Claude Lacoursière HPC2N/VRlab, Umeå Universitet, Sweden, and CMLabs Simulations, Montréal, Canada May 18, 2005 Typeset by FoilTEX May 16th 2005 Outline basics of vehicle dynamics different
Approach based on Cartesian coordinates
 GraSMech course 2005-2006 Computer-aided analysis of rigid and flexible multibody systems Approach based on Cartesian coordinates Prof. O. Verlinden Faculté polytechnique de Mons Olivier.Verlinden@fpms.ac.be
GraSMech course 2005-2006 Computer-aided analysis of rigid and flexible multibody systems Approach based on Cartesian coordinates Prof. O. Verlinden Faculté polytechnique de Mons Olivier.Verlinden@fpms.ac.be
Chapter 8: Introduction to Evolutionary Computation
 Computational Intelligence: Second Edition Contents Some Theories about Evolution Evolution is an optimization process: the aim is to improve the ability of an organism to survive in dynamically changing
Computational Intelligence: Second Edition Contents Some Theories about Evolution Evolution is an optimization process: the aim is to improve the ability of an organism to survive in dynamically changing
ANALYTICAL DESIGN OF BUS PASSENGER TIE ROD
 ANALYTICAL DESIGN OF BUS PASSENGER TIE ROD Mr. Prashant R. Vithalkar 1, Prof. U. D. Gulhane, Dr. R. R. Gawande 3 1 P. G. Scholar, Bapurao Deshmukh College of Engineering, Sevagram, Wardha, Maharashtra,
ANALYTICAL DESIGN OF BUS PASSENGER TIE ROD Mr. Prashant R. Vithalkar 1, Prof. U. D. Gulhane, Dr. R. R. Gawande 3 1 P. G. Scholar, Bapurao Deshmukh College of Engineering, Sevagram, Wardha, Maharashtra,
Planar Rigid Body Kinematics Homework
 Chapter 2 Planar Rigid ody Kinematics Homework Freeform c 2016 2-1 2-2 Freeform c 2016 Homework 2. Given: The pulley shown below freely rotates about point C and interacts with two rubber belts (one horizontal,
Chapter 2 Planar Rigid ody Kinematics Homework Freeform c 2016 2-1 2-2 Freeform c 2016 Homework 2. Given: The pulley shown below freely rotates about point C and interacts with two rubber belts (one horizontal,
Numerical Methods for Inverse Kinematics
 Numerical Methods for Inverse Kinematics Niels Joubert, UC Berkeley, CS184 2008-11-25 Inverse Kinematics is used to pose models by specifying endpoints of segments rather than individual joint angles.
Numerical Methods for Inverse Kinematics Niels Joubert, UC Berkeley, CS184 2008-11-25 Inverse Kinematics is used to pose models by specifying endpoints of segments rather than individual joint angles.
Exercise 1b: Differential Kinematics of the ABB IRB 120
 Exercise 1b: Differential Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 5, 2016 Abstract The aim of this exercise is to calculate the differential
Exercise 1b: Differential Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 5, 2016 Abstract The aim of this exercise is to calculate the differential
Two-Stage Stochastic and Deterministic Optimization
 Two-Stage Stochastic and Deterministic Optimization Tim Rzesnitzek, Dr. Heiner Müllerschön, Dr. Frank C. Günther, Michal Wozniak Abstract The purpose of this paper is to explore some interesting aspects
Two-Stage Stochastic and Deterministic Optimization Tim Rzesnitzek, Dr. Heiner Müllerschön, Dr. Frank C. Günther, Michal Wozniak Abstract The purpose of this paper is to explore some interesting aspects
Quaternion Data Fusion
 Quaternion Data Fusion Yang Cheng Mississippi State University, Mississippi State, MS 39762-5501, USA William D. Banas and John L. Crassidis University at Buffalo, State University of New York, Buffalo,
Quaternion Data Fusion Yang Cheng Mississippi State University, Mississippi State, MS 39762-5501, USA William D. Banas and John L. Crassidis University at Buffalo, State University of New York, Buffalo,
MECH 314 Dynamics of Mechanisms February 17, 2011 Offset Slider Crank Analysis and Some Other Slider Systems
 MCH 314 ynamics of Mechanisms February 17, 011 ffset Slider Crank nalysis and Some ther Slider Systems 1 ffset Slider Crank Position nalysis Position and velocity analysis for the common slider-crank has
MCH 314 ynamics of Mechanisms February 17, 011 ffset Slider Crank nalysis and Some ther Slider Systems 1 ffset Slider Crank Position nalysis Position and velocity analysis for the common slider-crank has
Vibration Characteristics of the Platform in highspeed Railway Elevated Station
 TELKOMNIKA, Vol.11, No.3, March 2013, pp. 1383 ~ 1392 e-issn: 2087-278X 1383 Vibration Characteristics of the Platform in highspeed Railway Elevated Station Wang Tie*, Wei Qingchao School of Civil Engineering,
TELKOMNIKA, Vol.11, No.3, March 2013, pp. 1383 ~ 1392 e-issn: 2087-278X 1383 Vibration Characteristics of the Platform in highspeed Railway Elevated Station Wang Tie*, Wei Qingchao School of Civil Engineering,
Lateral dynamics of a SUV on deformable surfaces by system identification. Part II. Models reconstruction
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Lateral dynamics of a SUV on deformable surfaces by system identification. Part II. Models reconstruction To cite this article:
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Lateral dynamics of a SUV on deformable surfaces by system identification. Part II. Models reconstruction To cite this article:
Lecture Notes Multibody Dynamics B, wb1413
 Lecture Notes Multibody Dynamics B, wb1413 A. L. Schwab & Guido M.J. Delhaes Laboratory for Engineering Mechanics Mechanical Engineering Delft University of Technolgy The Netherlands June 9, 29 Contents
Lecture Notes Multibody Dynamics B, wb1413 A. L. Schwab & Guido M.J. Delhaes Laboratory for Engineering Mechanics Mechanical Engineering Delft University of Technolgy The Netherlands June 9, 29 Contents
Prototype-less CAE Design of Mechanical Component for Automobile
 NOTE Prototype-less CAE Design of Mechanical Component for Automobile Shinji FUJITA Takeshi KOYAMA 1 1. Introduction Introduction In recent years, automobile development periods have been shortened, and
NOTE Prototype-less CAE Design of Mechanical Component for Automobile Shinji FUJITA Takeshi KOYAMA 1 1. Introduction Introduction In recent years, automobile development periods have been shortened, and
Machine Learning from Computer Simulations with Applications in Rail Vehicle Dynamics and System Identification
 Machine Learning from Computer Simulations with Applications in Rail Vehicle Dynamics and System Identification Mehdi Taheri Dissertation submitted to the faculty of the Virginia Polytechnic Institute
Machine Learning from Computer Simulations with Applications in Rail Vehicle Dynamics and System Identification Mehdi Taheri Dissertation submitted to the faculty of the Virginia Polytechnic Institute
RELATIVE MOTION ANALYSIS: VELOCITY (Section 16.5)
") RELATIVE MOTION ANALYSIS: VELOCITY (Section 16.5) Today s Objectives: Students will be able to: a) Describe the velocity of a rigid body in terms of translation and rotation components. b) Perform a relative-motion
RELATIVE MOTION ANALYSIS: VELOCITY (Section 16.5) Today s Objectives: Students will be able to: a) Describe the velocity of a rigid body in terms of translation and rotation components. b) Perform a relative-motion
University of Bristol - Explore Bristol Research. Publisher's PDF, also known as Version of record
 Watanabe, N., & Stoten, D. P. (214). Actuator control for a rapid prototyping railway bogie, using a dynamically substructured systems approach. In Proceedings of 12th International Conference on Motion
Watanabe, N., & Stoten, D. P. (214). Actuator control for a rapid prototyping railway bogie, using a dynamically substructured systems approach. In Proceedings of 12th International Conference on Motion
Design of an Innovative Acoustic Metamaterial
 Design of an Innovative Acoustic Metamaterial PAVLOS MAVROMATIDIS a, ANDREAS KANARACHOS b Electrical Engineering Department a, Mechanical Engineering Department b Frederick University 7 Y. Frederickou
Design of an Innovative Acoustic Metamaterial PAVLOS MAVROMATIDIS a, ANDREAS KANARACHOS b Electrical Engineering Department a, Mechanical Engineering Department b Frederick University 7 Y. Frederickou
Research Article Study on Elastic Dynamic Model for the Clamping Mechanism of High-Speed Precision Injection Molding Machine
 Shock and Vibration Volume 215, Article ID 427934, 13 pages http://dx.doi.org/1.1155/215/427934 Research Article Study on Elastic Dynamic Model for the Clamping Mechanism of High-Speed Precision Injection
Shock and Vibration Volume 215, Article ID 427934, 13 pages http://dx.doi.org/1.1155/215/427934 Research Article Study on Elastic Dynamic Model for the Clamping Mechanism of High-Speed Precision Injection
Introduction to SAMCEF MECANO
 Introduction to SAMCEF MECANO 1 Outline Introduction Generalized coordinates Kinematic constraints Time integration Description and paramerization of finite rotations Acknowledgements Michel Géradin (ULg)
Introduction to SAMCEF MECANO 1 Outline Introduction Generalized coordinates Kinematic constraints Time integration Description and paramerization of finite rotations Acknowledgements Michel Géradin (ULg)
Solving high order nonholonomic systems using Gibbs-Appell method
 Solving high order nonholonomic systems using Gibbs-Appell method Mohsen Emami, Hassan Zohoor and Saeed Sohrabpour Abstract. In this paper we present a new formulation, based on Gibbs- Appell method, for
Solving high order nonholonomic systems using Gibbs-Appell method Mohsen Emami, Hassan Zohoor and Saeed Sohrabpour Abstract. In this paper we present a new formulation, based on Gibbs- Appell method, for
SYNTHESIS OF A FLUID JOURNAL BEARING USING A GENETIC ALGORITHM
 SYNTHESIS OF A FLUID JOURNAL BEARING USING A GENETIC ALGORITHM A. MANFREDINI and P. VIGNI Dipartimento di Ingegneria Meccanica, Nucleare e della Produzione (DIMNP) - University of Pisa Via Diotisalvi,
SYNTHESIS OF A FLUID JOURNAL BEARING USING A GENETIC ALGORITHM A. MANFREDINI and P. VIGNI Dipartimento di Ingegneria Meccanica, Nucleare e della Produzione (DIMNP) - University of Pisa Via Diotisalvi,
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics October 24, 2016 Antonio Recuero University of Wisconsin-Madison Quote of the Day If a cluttered desk is a sign of a cluttered mind, of what, then, is an
ME751 Advanced Computational Multibody Dynamics October 24, 2016 Antonio Recuero University of Wisconsin-Madison Quote of the Day If a cluttered desk is a sign of a cluttered mind, of what, then, is an
Virtual Data Evaluation for ABS Maneuvers on Rough Roads
 Virtual Data Evaluation for ABS Maneuvers on Rough Roads Complete Vehicle Simulation for Virtual Data Evaluation in Highly Dynamical ABS Deceleration Processes on Rough Roads S. Brandes 1, Dr. Sedlaczek
Virtual Data Evaluation for ABS Maneuvers on Rough Roads Complete Vehicle Simulation for Virtual Data Evaluation in Highly Dynamical ABS Deceleration Processes on Rough Roads S. Brandes 1, Dr. Sedlaczek
Planar Multi-body Dynamics of a Tracked Vehicle using Imaginary Wheel Model for Tracks
 Defence Science Journal, Vol. 67, No. 4, July 2017, pp. 460-464, DOI : 10.14429/dsj.67.11548 2017, DESIDOC Planar Multi-body Dynamics of a Tracked Vehicle using Imaginary Wheel Model for Tracks Ilango
Defence Science Journal, Vol. 67, No. 4, July 2017, pp. 460-464, DOI : 10.14429/dsj.67.11548 2017, DESIDOC Planar Multi-body Dynamics of a Tracked Vehicle using Imaginary Wheel Model for Tracks Ilango
Condensed Table of Contents for Introduction to Stochastic Search and Optimization: Estimation, Simulation, and Control by J. C.
 Condensed Table of Contents for Introduction to Stochastic Search and Optimization: Estimation, Simulation, and Control by J. C. Spall John Wiley and Sons, Inc., 2003 Preface... xiii 1. Stochastic Search
Condensed Table of Contents for Introduction to Stochastic Search and Optimization: Estimation, Simulation, and Control by J. C. Spall John Wiley and Sons, Inc., 2003 Preface... xiii 1. Stochastic Search
Reach Sets and the Hamilton-Jacobi Equation
 Reach Sets and the Hamilton-Jacobi Equation Ian Mitchell Department of Computer Science The University of British Columbia Joint work with Alex Bayen, Meeko Oishi & Claire Tomlin (Stanford) research supported
Reach Sets and the Hamilton-Jacobi Equation Ian Mitchell Department of Computer Science The University of British Columbia Joint work with Alex Bayen, Meeko Oishi & Claire Tomlin (Stanford) research supported
Robotics I. Figure 1: Initial placement of a rigid thin rod of length L in an absolute reference frame.
 Robotics I September, 7 Exercise Consider the rigid body in Fig., a thin rod of length L. The rod will be rotated by an angle α around the z axis, then by an angle β around the resulting x axis, and finally
Robotics I September, 7 Exercise Consider the rigid body in Fig., a thin rod of length L. The rod will be rotated by an angle α around the z axis, then by an angle β around the resulting x axis, and finally
5.5 Exercises for This Chapter Two-Axle Vehicle on Cosine Track Two-Axle Vehicle on Generally Periodic Track...
 Contents 1 Introduction... 1 1.1 The Basic Function of the Wheel/rail System.... 1 1.2 Significance of Dynamics on the Operation of Rail Vehicles... 2 1.3 On the History of Research in the Field of Railway
Contents 1 Introduction... 1 1.1 The Basic Function of the Wheel/rail System.... 1 1.2 Significance of Dynamics on the Operation of Rail Vehicles... 2 1.3 On the History of Research in the Field of Railway
Catastrophe and Stability Analysis of a Cable-Driven Actuator
 Catastrophe and Stability Analysis of a Cable-Driven Actuator James S. Sulzer, Michael A. Peshkin and James L. Patton Abstract Recent work in human-robot interaction has revealed the need for compliant,
Catastrophe and Stability Analysis of a Cable-Driven Actuator James S. Sulzer, Michael A. Peshkin and James L. Patton Abstract Recent work in human-robot interaction has revealed the need for compliant,
We provide two sections from the book (in preparation) Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill.
 Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill.") We provide two sections from the book (in preparation) Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill. 2.3.2. Steering control using point mass model: Open loop commands We consider
We provide two sections from the book (in preparation) Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill. 2.3.2. Steering control using point mass model: Open loop commands We consider
Technical Report TR
 Simulation-Based Engineering Lab University of Wisconsin-Madison Technical Report TR-2016-16 Using the Complementarity and Penalty Methods for Solving Frictional Contact Problems in Chrono: Validation
Simulation-Based Engineering Lab University of Wisconsin-Madison Technical Report TR-2016-16 Using the Complementarity and Penalty Methods for Solving Frictional Contact Problems in Chrono: Validation
Trajectory-tracking control of a planar 3-RRR parallel manipulator
 Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
Failure analysis and optimization design of a centrifuge rotor
 Engineering Failure Analysis 14 (2007) 101 109 www.elsevier.com/locate/engfailanal Failure analysis and optimization design of a centrifuge rotor Xuan Hai-jun *, Song Jian Institute of Chemical Process
Engineering Failure Analysis 14 (2007) 101 109 www.elsevier.com/locate/engfailanal Failure analysis and optimization design of a centrifuge rotor Xuan Hai-jun *, Song Jian Institute of Chemical Process
GEOMETRICAL AND OPERATIONAL CONSTRAINTS OF AN ACKERMANN STEERING LINKAGE
 U.P.B. Sci. Bull., Series D, Vol. 74, Iss., 0 ISSN 454-58 GEOMETRICAL AND OPERATIONAL CONSTRAINTS OF AN ACKERMANN STEERING LINKAGE Aurel P.STOICESCU In lucrare se analizează restricţiile geometrice şi
U.P.B. Sci. Bull., Series D, Vol. 74, Iss., 0 ISSN 454-58 GEOMETRICAL AND OPERATIONAL CONSTRAINTS OF AN ACKERMANN STEERING LINKAGE Aurel P.STOICESCU In lucrare se analizează restricţiile geometrice şi
FORCE ANALYSIS OF MACHINERY. School of Mechanical & Industrial Engineering, AAiT
 1 FORCE ANALYSIS OF MACHINERY School of Mechanical & Industrial Engineering, AAiT INTRODUCTION 2 A machine is a device that performs work and, as such, transmits energy by means mechanical force from a
1 FORCE ANALYSIS OF MACHINERY School of Mechanical & Industrial Engineering, AAiT INTRODUCTION 2 A machine is a device that performs work and, as such, transmits energy by means mechanical force from a
Design of Integrated Error Compensating System for the Portable Flexible CMMs
 Design of Integrated Error Compensating System for the Portable Flexible CMMs Qing-Song Cao, Jie Zhu, Zhi-Fan Gao, and Guo-Liang Xiong College of Mechanical and Electrical Engineering, East China Jiaotong
Design of Integrated Error Compensating System for the Portable Flexible CMMs Qing-Song Cao, Jie Zhu, Zhi-Fan Gao, and Guo-Liang Xiong College of Mechanical and Electrical Engineering, East China Jiaotong
Graphical User Interface (GUI) for Torsional Vibration Analysis of Rotor Systems Using Holzer and MatLab Techniques
 for Torsional Vibration Analysis of Rotor Systems Using Holzer and MatLab Techniques") Basrah Journal for Engineering Sciences, vol. 14, no. 2, 2014 255 Graphical User Interface (GUI) for Torsional Vibration Analysis of Rotor Systems Using Holzer and MatLab Techniques Dr. Ameen Ahmed Nassar
Basrah Journal for Engineering Sciences, vol. 14, no. 2, 2014 255 Graphical User Interface (GUI) for Torsional Vibration Analysis of Rotor Systems Using Holzer and MatLab Techniques Dr. Ameen Ahmed Nassar
1373. Structural synthesis for broken strands repair operation metamorphic mechanism of EHV transmission lines
 1373. Structural synthesis for broken strands repair operation metamorphic mechanism of EHV transmission lines Q. Yang 1 H. G. Wang 2 S. J. Li 3 1 3 College of Mechanical Engineering and Automation Northeastern
1373. Structural synthesis for broken strands repair operation metamorphic mechanism of EHV transmission lines Q. Yang 1 H. G. Wang 2 S. J. Li 3 1 3 College of Mechanical Engineering and Automation Northeastern
Control of a Car-Like Vehicle with a Reference Model and Particularization
 Control of a Car-Like Vehicle with a Reference Model and Particularization Luis Gracia Josep Tornero Department of Systems and Control Engineering Polytechnic University of Valencia Camino de Vera s/n,
Control of a Car-Like Vehicle with a Reference Model and Particularization Luis Gracia Josep Tornero Department of Systems and Control Engineering Polytechnic University of Valencia Camino de Vera s/n,
Excel Spreadsheet in Mechanical Engineering Technology Education
 Excel Spreadsheet in Mechanical Engineering Technology Education Prof. Ti Lin, Liu Department of Manufacturing & Mechanical Engineering Technology Rochester Institute of Technology, Rochester, NY 14623
Excel Spreadsheet in Mechanical Engineering Technology Education Prof. Ti Lin, Liu Department of Manufacturing & Mechanical Engineering Technology Rochester Institute of Technology, Rochester, NY 14623
MECHANISM AND MACHINE THEORY
 LITHUANIAN UNIVERSITY OF AGRICULTURE FACULTY OF AGRICULTURE ENGINEERING Department of Mechanics STUDY SUBJECT DESCRIPTION MECHANISM AND MACHINE THEORY Study cycle: BSc Number of ECTS credit points: 4,5
LITHUANIAN UNIVERSITY OF AGRICULTURE FACULTY OF AGRICULTURE ENGINEERING Department of Mechanics STUDY SUBJECT DESCRIPTION MECHANISM AND MACHINE THEORY Study cycle: BSc Number of ECTS credit points: 4,5
Available online at ScienceDirect. Procedia CIRP 36 (2015 ) CIRP 25th Design Conference Innovative Product Creation
 CIRP 25th Design Conference Innovative Product Creation") Available online at www.sciencedirect.com ScienceDirect Procedia CIRP 36 (2015 ) 111 116 CIRP 25th Design Conference Innovative Product Creation Machine stiffness rating: Characterization and evaluation
Available online at www.sciencedirect.com ScienceDirect Procedia CIRP 36 (2015 ) 111 116 CIRP 25th Design Conference Innovative Product Creation Machine stiffness rating: Characterization and evaluation
= o + t = ot + ½ t 2 = o + 2
 Chapters 8-9 Rotational Kinematics and Dynamics Rotational motion Rotational motion refers to the motion of an object or system that spins about an axis. The axis of rotation is the line about which the
Chapters 8-9 Rotational Kinematics and Dynamics Rotational motion Rotational motion refers to the motion of an object or system that spins about an axis. The axis of rotation is the line about which the
A Comparative Study of Joint Clearance Effects on Dynamic Behavior of Planar Multibody Mechanical Systems
 2815 A Comparative Study of Joint Clearance Effects on Dynamic Behavior of Planar Multibody Mechanical Systems Abstract Clearance always exists in actual joint due to many uncertainties such as machining
2815 A Comparative Study of Joint Clearance Effects on Dynamic Behavior of Planar Multibody Mechanical Systems Abstract Clearance always exists in actual joint due to many uncertainties such as machining
Introduction. Machine Element Design Walid Khraisat
 Introduction Machine Element Design 0906437 Walid Khraisat What Is Design? Engineering design is a systematic process by which solutions to the needs of humankind are obtained Examples Lightweight,compact
Introduction Machine Element Design 0906437 Walid Khraisat What Is Design? Engineering design is a systematic process by which solutions to the needs of humankind are obtained Examples Lightweight,compact
Design Lower Arm Using Optimum Approach
 Design Lower Arm Using Optimum Approach Adel Mahmoud Bash Department of Mechanical Engineering, College of Engineering, Tikrit University, Salah al_deen, Iraq Abstract In the automotive industry, the riding
Design Lower Arm Using Optimum Approach Adel Mahmoud Bash Department of Mechanical Engineering, College of Engineering, Tikrit University, Salah al_deen, Iraq Abstract In the automotive industry, the riding
MATHEMATICAL MODELLING AND SIMULATION OF A TORSIONAL BAR ACTUATED TRUNK LID MECHANISM FOR
 MATHEMATICAL MODELLING AND SIMULATION OF A TORSIONAL AR ACTUATED TRUNK LID MECHANISM FOR A PASSENGER CAR A. Yildiz 1, O. Kopmaz 1 1 Uludag University, Engineering Faculty, Mechanical Engineering Department,
MATHEMATICAL MODELLING AND SIMULATION OF A TORSIONAL AR ACTUATED TRUNK LID MECHANISM FOR A PASSENGER CAR A. Yildiz 1, O. Kopmaz 1 1 Uludag University, Engineering Faculty, Mechanical Engineering Department,
The basic principle to be used in mechanical systems to derive a mathematical model is Newton s law,
 Chapter. DYNAMIC MODELING Understanding the nature of the process to be controlled is a central issue for a control engineer. Thus the engineer must construct a model of the process with whatever information
Chapter. DYNAMIC MODELING Understanding the nature of the process to be controlled is a central issue for a control engineer. Thus the engineer must construct a model of the process with whatever information
APPLICATION OF ARTIFICIAL NEURAL NETWORK IN MODELING OF ENTOMOPTER DYNAMICS
 APPLICATION OF ARTIFICIAL NEURAL NETWORK IN MODELING OF ENTOMOPTER DYNAMICS Paweł Czekałowski*, Krzysztof Sibilski**, Andrzej Żyluk** *Wroclaw University of Technology, **Air Force Institute of Technology
APPLICATION OF ARTIFICIAL NEURAL NETWORK IN MODELING OF ENTOMOPTER DYNAMICS Paweł Czekałowski*, Krzysztof Sibilski**, Andrzej Żyluk** *Wroclaw University of Technology, **Air Force Institute of Technology
HPMPC - A new software package with efficient solvers for Model Predictive Control
 - A new software package with efficient solvers for Model Predictive Control Technical University of Denmark CITIES Second General Consortium Meeting, DTU, Lyngby Campus, 26-27 May 2015 Introduction Model
- A new software package with efficient solvers for Model Predictive Control Technical University of Denmark CITIES Second General Consortium Meeting, DTU, Lyngby Campus, 26-27 May 2015 Introduction Model
Contents. Dynamics and control of mechanical systems. Focus on
 Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies