Fast direct solvers for elliptic PDEs
|
|
|
- Nelson Dennis
- 5 years ago
- Views:
Transcription
1 Fast direct solvers for elliptic PDEs Gunnar Martinsson The University of Colorado at Boulder Students: Adrianna Gillman (now at Dartmouth) Nathan Halko Sijia Hao Patrick Young (now at GeoEye Inc.) Collaborators: Eric Michielssen (Michigan) Eduardo Corona (NYU) Vladimir Rokhlin (Yale) Mark Tygert (NYU) Denis Zorin (NYU)
2 The talk will describe fast direct techniques for solving the linear systems arising from the discretization of linear boundary value problems (BVPs) of the form (BVP) { A u(x) = g(x), x Ω, B u(x) = f(x), x Γ, where Ω is a domain in R 2 or R 3 with boundary Γ, and where A is an elliptic differential operator. Examples include: The equations of linear elasticity. Stokes equation. Helmholtz equation (at least at low and intermediate frequencies). Time-harmonic Maxwell (at least at low and intermediate frequencies). Example: Poisson equation with Dirichlet boundary data: { u(x) = g(x), x Ω, u(x) = f(x), x Γ.
3 Discretization of linear Boundary Value Problems Conversion of the BVP to a Boundary Integral Equation (BIE). Direct discretization of the differential operator via Finite Elements, Finite Differences,... N N discrete linear system. Very large, sparse, ill-conditioned. Fast solvers: iterative (multigrid), O(N), direct (nested dissection), O(N 3/2 ). Discretization of (BIE) using Nyström, collocation, BEM,.... N N discrete linear system. Moderate size, dense, (often) well-conditioned. Iterative solver accelerated by fast matrix-vector multiplier, O(N).
4 Discretization of linear Boundary Value Problems Conversion of the BVP to a Boundary Integral Equation (BIE). Direct discretization of the differential operator via Finite Elements, Finite Differences,... N N discrete linear system. Very large, sparse, ill-conditioned. Fast solvers: iterative (multigrid), O(N), direct (nested dissection), O(N 3/2 ). O(N) direct solvers. Discretization of (BIE) using Nyström, collocation, BEM,.... N N discrete linear system. Moderate size, dense, (often) well-conditioned. Iterative solver accelerated by fast matrix-vector multiplier, O(N). O(N) direct solvers.
5 What does a direct solver mean in this context? Basically, it is a solver that is not iterative... Given a computational tolerance ε, and a linear system (2) A u = b, (where the system matrix A is often defined implicitly), a direct solver constructs an operator T such that A 1 T ε. Then an approximate solution to (2) is obtained by simply evaluating u approx = T b. The matrix T is typically constructed in a compressed format that allows the matrix-vector product T b to be evaluated rapidly. Variation: Find factors B and C such that A B C ε, and linear solves involving the matrices B and C are fast. (LU-decomposition, Cholesky, etc.)
6 Iterative versus direct solvers Two classes of methods for solving an N N linear algebraic system A u = b. Iterative methods: Examples: GMRES, conjugate gradients, Gauss-Seidel, etc. Construct a sequence of vectors u 1, u 2, u 3,... that (hopefully!) converge to the exact solution. Many iterative methods access A only via its action on vectors. Often require problem specific preconditioners. High performance when they work well. O(N) solvers. Direct methods: Examples: Gaussian elimination, LU factorizations, matrix inversion, etc. Always give an answer. Deterministic. Robust. No convergence analysis. Great for multiple right hand sides. Have often been considered too slow for high performance computing. (Directly access elements or blocks of A.) (Exact except for rounding errors.)
7 Advantages of direct solvers over iterative solvers: 1. Applications that require a very large number of solves: Molecular dynamics. Scattering problems. Optimal design. (Local updates to the system matrix are cheap.) A couple of orders of magnitude speed-up is often possible. 2. Problems that are relatively ill-conditioned: Scattering problems near resonant frequencies. Ill-conditioning due to geometry (elongated domains, percolation, etc). Ill-conditioning due to lazy handling of corners, cusps, etc. Finite element and finite difference discretizations. Scattering problems intractable to existing methods can (sometimes) be solved. 3. Direct solvers can be adapted to construct spectral decompositions: Analysis of vibrating structures. Acoustics. Buckling of mechanical structures. Wave guides, bandgap materials, etc.
8 Advantages of direct solvers over iterative solvers, continued: Perhaps most important: Engineering considerations. Direct methods tend to be more robust than iterative ones. This makes them more suitable for black-box implementations. Commercial software developers appear to avoid implementing iterative solvers whenever possible. (Sometimes for good reasons.) The effort to develop direct solvers aims to help in the development of general purpose software packages solving the basic linear boundary value problems of mathematical physics.
9 How do you construct direct solvers with less than O(N 3 ) complexity? For sparse matrices, algorithms such as nested dissection achieve O(N 1.5 ) or O(N 2 ) complexity by reordering the matrix. More recently, methods that exploit data-sparsity have achieved linear or close to linear complexity in a broad variety of environments. In this talk, the data-sparse matrices under consideration have off-diagonal blocks that can to high accuracy (say ten of fifteen digits) be approximated by low-rank matrices.
10 Fast direct solvers for elliptic PDEs based on data-sparsity: (Apologies to co-workers: A. Gillman, L. Greengard, D. Gueyffier, V. Rokhlin, M. Tygert, P. Young,... ) 11 Data-sparse matrix algebra / wavelets: Beylkin, Coifman, Rokhlin, et al 13 Fast inversion of 1D operators: V. Rokhlin and P. Starr 16 scattering problems: E. Michielssen, A. Boag and W.C. Chew, 1 factorization of non-standard forms: G. Beylkin, J. Dunn, D. Gines, 1 H-matrix methods: W. Hackbusch, B. Khoromskijet, S. Sauter,..., 2 Cross approximation, matrix skeletons: etc., E. Tyrtyshnikov 22 O(N 3/2 ) inversion of Lippmann-Schwinger equations: Y. Chen, 22 Hierarchically Semi-Separable matrices: M. Gu, S. Chandrasekharan. 22 (1?) H 2 -matrix methods: S. Börm, W. Hackbusch, B. Khoromskijet, S. Sauter. 24 Inversion of FMM structure : S. Chandrasekharan, T. Pals. 24 Proofs of compressibility: M. Bebendorf, S. Börm, W. Hackbusch, Accelerated nested diss. via H-mats: L. Grasedyck, R. Kriemann, S. LeBorne [2] S. Chandrasekharan, M. Gu, X.S. Li, J. Xia. [21], P. Schmitz and L. Ying. 21 construction of A 1 via randomized sampling: L. Lin, J. Lu, L. Ying.
11 Current status problems with non-oscillatory kernels (Laplace, elasticity, Stokes, etc). Problems on 1D domains: Integral equations on the line: Done. O(N) with very small constants. Boundary Integral Equations in R 2 : Done. O(N) with small constants. BIEs on axisymmetric surfaces in R 3 : Done. O(N) with small constants. Problems on 2D domains: FEM matrices for elliptic PDEs in the plane: O(N) algorithms exist. Work remains. Volume Int. Eq. in the plane (e.g. low frequency Lippman-Schwinger): O(N (log N) p ) algorithms exist. O(N) and high accuracy methods are under development. Boundary Integral Equations in R 3 : O(N (log N) p ) algorithms exist. O(N) and high accuracy methods are under development. Problems on 3D domains: FEM matrices for elliptic PDEs: Very active area! (Grasedyck & LeBorne; Michielssen; Xia; Ying;... ) Volume Int. Eq.: Can be done, but requires a lot of memory.
12 Current status problems with oscillatory kernels (Helmholtz, time-harmonic Maxwell, etc.). Direct solvers are extremely desirable in this environment! Problems on 1D domains: Integral equations on the line: Done O(N) with small constants. Boundary Integral Equations in R 2 :??? ( Elongated surfaces in R 2 and R 3 : Done O(N log N).) Problems on 2D domains: FEM matrices for Helmholtz equation in the plane:??? (O(N 1.5 ) inversion is possible.) Volume Int. Eq. in the plane (e.g. high frequency Lippman-Schwinger):??? Boundary Integral Equations in R 3 :??? Problems on 3D domains:???? (O(N 2 ) inversion sometimes possible memory requirement is a concern.) Recent work by B. Engquist and L. Ying very efficient pre-conditioners based on structured matrix calculations. Semi-direct.
13 How do these algorithms actually work? Let us consider the simplest case: fast inversion of an equation on a 1D domain. Things are still very technical... quite involved notation... What follows is a brief description of a method from an extreme birds-eye view. We start by describing some key properties of the matrices under consideration.
14 For concreteness, consider a 1 1 matrix A approximating the operator [S Γ u](x) = u(x) + log x y u(y) ds(y). The matrix A is characterized by: Irregular behavior near the diagonal. Smooth entries away from the diagonal. Γ The contour Γ. The matrix A.
15 Plot of a ij vs i and j (without the diagonal entries) The 5 th row of A (without the diagonal entries)
16 Plot of a ij vs i and j (without the diagonal entries) The 5 th row of A (without the diagonal entries)
17 Key observation: Off-diagonal blocks of A have low rank. Consider two patches Γ 1 and Γ 2 and the corresponding block of A: Γ 2 Γ 2 Γ 1 A 12 Γ 1 The contour Γ The matrix A The block A 12 is a discretization of the integral operator [S Γ1 Γ 2 u](x) = u(x) + log x y u(y) ds(y), x Γ 1. Γ 2
18 Singular values of A 12 (now for a 2 2 matrix A): log 1 (σ j ) j
19 What we see is an artifact of the smoothing effect of coercive elliptic differential equations; it can be interpreted as a loss of information. This effect has many well known physical consequences: The intractability of solving the heat equation backwards. The St Venant principle in mechanics. The inaccuracy of imaging at sub-wavelength scales. Such phenomena should be viewed in contrast to high-frequency scattering problems extreme accuracy of optics etc.
20 Now that we know that off-diagonal blocks of A have low rank, all we need to do is to tessellate the matrix into as few such blocks are possible. A standard tessellation is: The numbers shown are ranks to precision ε = 1 1 (N tot = ). Blocks with red and blue dots are stored as dense matrices. Note how all blocks are well-separated from the diagonal. This is characteristic of both the Fast Multipole Method, and H-matrix methods. (Our tessellation is slightly non-standard since it s based on a tree on parameter space rather than physical space.)
21 Storing the matrix: O(N log N) is simple. (H-matrix, Barnes-Hut) O(N) is not that hard. (H 2 -matrix, FMM) Matrix-vector multiply: O(N log N) is simple. (H-matrix, Barnes-Hut) O(N) is not that hard. (H 2 -matrix, FMM) Matrix inversion: A bit more complicated.
22 1 13 A 11 A Storing the matrix: O(N log N) is simple. (H-matrix, Barnes-Hut) O(N) is not that hard. (H 2 -matrix, FMM) A 1 21 A Matrix-vector multiply: O(N log N) is simple. (H-matrix, Barnes-Hut) O(N) is not that hard. (H 2 -matrix, FMM) Matrix inversion: A bit more complicated. With A = A 11 A 12 A 21 A 22. we have A 1 = B 1 11 B 1 11 A 12 A 1 22 A 1 22 A 21 B 1 11 A A 1 22 A 21 B 1 11 A 12 A 1 22, where B 11 = A 11 A 12 A 1 22 A 21.
23 1 13 A 11 A Storing the matrix: O(N log N) is simple. (H-matrix, Barnes-Hut) O(N) is not that hard. (H 2 -matrix, FMM) A 1 21 A Matrix-vector multiply: O(N log N) is simple. (H-matrix, Barnes-Hut) O(N) is not that hard. (H 2 -matrix, FMM) Matrix inversion: A bit more complicated. With A = A 11 A 12 A 21 A 22. we have A 1 = B 1 11 B 1 11 A 12 A 1 22 A 1 22 A 21 B 1 11 A A 1 22 A 21 B 1 11 A 12 A 1 22, where B 11 = A 11 A 12 A 1 22 A 21. Recurse for O(N(log N) 2 ) (?) complexity.
24 We are in luck! The 1D case has a remarkable property: Even off-diagonal blocks that touch the diagonal have low rank
25 We are in luck! The 1D case has a remarkable property: Even off-diagonal blocks that touch the diagonal have low rank Matrix inversion: Simple! With A = A 11 A 12 A 21 A 22. we have A 1 = B 1 11 B 1 11 A 12 A 1 22 A 1 22 A 21 B 1 11 A A 1 22 A 21 B 1 11 A 12 A 1 22, where B 11 = A 11 A 12 A 1 22 A 21.
26 We are in luck! The 1D case has a remarkable property: Even off-diagonal blocks that touch the diagonal have low rank Matrix inversion: Simple! With A = A 11 A 12 A 21 A 22. we have A 1 = B 1 11 B 1 11 A 12 A 1 22 A 1 22 A 21 B 1 11 A A 1 22 A 21 B 1 11 A 12 A 1 22, where B 11 = A 11 A 12 A 1 22 A 21.
27 The trick of including blocks touching the diagonal has the advantages that it leads to much simpler algorithms, and less communication. It has the slight disadvantage that the ranks increase somewhat. It has a profound disadvantage in that standard (analytic) expansions of the kernel functions do not work. This problem has only been overcome in the last few years.
28 Direct solvers based on Hierarchically Semi-Separable matrices Consider a linear system A q = f, where A is a block-separable matrix consisting of p p blocks of size n n: D 11 A 12 A 13 A 14 A 21 D 22 A 23 A 24 A =. (Shown for p = 4.) A 31 A 32 D 33 A 34 A 41 A 42 A 43 D 44 Core assumption: Each off-diagonal block A ij admits the factorization A ij = U i à ij V j n n n k k k k n where the rank k is significantly smaller than the block size n. (Say k n/2.) The critical part of the assumption is that all off-diagonal blocks in the i th row use the same basis matrices U i for their column spaces (and analogously all blocks in the j th column use the same basis matrices V j for their row spaces).
29 We get A = D 11 U 1 Ã 12 V 2 U 1 Ã 13 V 3 U 1 Ã 14 V 4 U 2 Ã 21 V 1 D 22 U 2 Ã 23 V 3 U 2 Ã 24 V 4 U 3 Ã 31 V 1 U 3 Ã 32 V 2 D 33 U 3 Ã 34 V 4 U 4 Ã 41 V 1 U 4 Ã 42 V 2 U 4 Ã 43 V 3 D 44. Then A admits the factorization: U 1 Ã 12 Ã 13 Ã 14 V 1 D 1 U 2 Ã 21 Ã 23 Ã 24 V 2 D 2 A = + U 3 Ã 31 Ã 32 Ã 34 V 3 D 3 U 4 Ã 41 Ã 42 Ã 43 V 4 D 4 }{{}}{{}}{{}}{{} =U =V =D or =Ã A = U Ã V + D, p n p n p n p k p k p k p k p n p n p n
30 Lemma: [Variation of Woodbury] If an N N matrix A admits the factorization A = U Ã V + D, p n p n p n p k p k p k p k p n p n p n then A 1 = E (Ã + ˆD) 1 F + G, p n p n p n p k p k p k p k p n p n p n where (provided all intermediate matrices are invertible) ˆD = ( V D 1 U ) 1, E = D 1 U ˆD, F = ( ˆD V D 1 ), G = D 1 D 1 U ˆD V D 1. Note: All matrices set in blue are block diagonal.
31 The Woodbury formula replaces the task of inverting a p n p n matrix by the task of inverting a p k p k matrix. The cost is reduced from (p n) 3 to (p k) 3. We do not yet have a fast scheme... (Recall: A has p p blocks, each of size n n and of rank k.)
32 We must recurse! Using a telescoping factorization of A (a hierarchically block-separable representation): A = U (3)( U (2)( U (1) B () (V (1) ) + B (1)) (V (2) ) + B (2)) (V (3) ) + D (3), we have a formula A 1 = E (3)( E (2)( E (1) ˆD() (F (1) ) + ˆD (1) ) (F (2) ) + ˆD (2) ) (V (3) ) + ˆD (3). Block structure of factorization: U (3) U (2) U (1) B () (V (1) ) B (1) (V (2) ) B (2) (V (3) ) D (3) All matrices are now block diagonal except ˆD (), which is small.
33 Formal definition of an HSS matrix Suppose T is a binary tree on the index vector I = [1, 2, 3,..., N]. For a node τ in the tree, let I τ denote the corresponding index vector. Level 1 I 1 = [1, 2,..., 4] Level I 2 = [1, 2,..., 2], I 3 = [21, 22,..., 4] Level I 4 = [1, 2,..., 1], I 5 = [11, 12,..., 2],... Level I = [1, 2,..., 5], I = [51, 52,..., 1],... Numbering of nodes in a fully populated binary tree with L = 3 levels. The root is the original index vector I = I 1 = [1, 2,..., 4].
34 Formal definition of an HSS matrix Suppose T is a binary tree. For a node τ in the tree, let I τ denote the corresponding index vector. For leaves σ and τ, set A σ,τ = A(I σ, I τ ) and suppose that all off-diagonal blocks satisfy A σ,τ = U σ Ã σ,τ V τ σ τ n n n k k k k n For non-leaves σ and τ, let {σ 1, σ 2 } denote the children of σ, and let {τ 1, τ 2 } denote the children of τ. Set A σ,τ = Ãσ 1,τ 1 Ã σ1,τ 2 Ã σ2,τ 1 Ã σ2,τ 2 Then suppose that the off-diagonal blocks satisfy A σ,τ = U σ Ã σ,τ V τ σ τ 2k 2k 2k k k k k 2k
35 Name: Size: Function: For each leaf D τ n n The diagonal block A(I τ, I τ ). node τ: U τ n k Basis for the columns in the blocks in row τ. V τ n k Basis for the rows in the blocks in column τ. For each parent B τ 2k 2k Interactions between the children of τ. node τ: U τ 2k k Basis for the columns in the (reduced) blocks in row τ. V τ 2k k Basis for the rows in the (reduced) blocks in column τ. An HSS matrix A associated with a tree T is fully specified if the factors listed above are provided.
36 What is the role of the basis matrices U τ and V τ? Recall our toy example: A = D 11 U 1 Ã 12 V 2 U 1 Ã 13 V 3 U 1 Ã 14 V 4 U 2 Ã 21 V 1 D 22 U 2 Ã 23 V 3 U 2 Ã 24 V 4 U 3 Ã 31 V 1 U 3 Ã 32 V 2 D 33 U 3 Ã 34 V 4. U 4 Ã 41 V 1 U 4 Ã 42 V 2 U 4 Ã 43 V 3 D 44 We see that the columns of U 1 must span the column space of the matrix A(I 1, I c 1) where I 1 is the index vector for the first block and I c 1 = I\I 1. A(I 1, I c 1 ) The matrix A
37 What is the role of the basis matrices U τ and V τ? Recall our toy example: A = D 11 U 1 Ã 12 V 2 U 1 Ã 13 V 3 U 1 Ã 14 V 4 U 2 Ã 21 V 1 D 22 U 2 Ã 23 V 3 U 2 Ã 24 V 4 U 3 Ã 31 V 1 U 3 Ã 32 V 2 D 33 U 3 Ã 34 V 4. U 4 Ã 41 V 1 U 4 Ã 42 V 2 U 4 Ã 43 V 3 D 44 We see that the columns of U 2 must span the column space of the matrix A(I 2, I c 2) where I 2 is the index vector for the first block and I c 2 = I\I 2. A(I 2, I c 2 ) The matrix A
38 Let us consider a specific example. Suppose that A is a discretization of the single layer operator [S Γ u](x) = u(x) + log x y u(y) ds(y). Γ Γ 2 A(I 2, I c 2 ) The contour Γ. The matrix A.
39 Singular values of A(I 2, I c 2 ) σj(a(i2, I c 2 )) To precision 1 1, the matrix A(I 2, I2 c ) has rank 36. j
40 Remark: In an HSS representation, the ranks are typically higher than in an H-matrix representation. Specifically, the block A(I 2, I2 c ) would typically be considered inadmissible. Instead, in an H-matrix representation, you would compress blocks such as A(I 2, I 4 ): Γ 2 A(I 2, I 4 ) Γ 4 The contour Γ. The matrix A.
41 Singular values of A(I 2, I c 2 ) and A(I 2, I 4 ): σj(a(i2, I4)) σj(a(i2, I c 2 )) j To precision 1 1, the matrix A(I 2, I2 c ) has rank 36. To precision 1 1, the matrix A(I 2, I 4 ) has rank 12.
42 Plot of A(I 2, I c 2 ) A(i,j) i j
43 Plot of A(I 2, I c 2 ) x A(i,j) i j (Note: the z-axis has been rescaled)
44 Plot of A(I 2, I 4 ) x A(i,j) i j
45 Choice of basis matrices (our approach is non-standard): Recall: The HSS structure relies on factorizations such as (for k < n) A σ,τ = U σ Ã σ,τ V τ n n n k k k k n For HSS matrix algebra to be numerically stable, it is critical that the basis matrices U τ and V τ be well-conditioned. The gold-standard is to have U τ and V τ be orthonormal (i.e. σ j (U τ ) = σ j (V τ ) = 1 for j = 1, 2,..., k), and this is commonly enforced. We have decided to instead use interpolatory decompositions in which: 1. U τ and V τ each contain the k k identity matrix as a submatrix. 2. U τ and V τ are reasonably well-conditioned. 3. Ã σ,τ is a submatrix of A for all σ, τ. Our choice leads to some loss of accuracy, but vastly simplifies the task of computing compressed representations in the context of integral equations. (For instance, if the original A represents a Nyström discretization, then the HSS representation on each level is also a Nyström discretization, only with modified diagonal blocks, and on coarser discretizations.)
46 Numerical examples All numerical examples were run on standard office desktops (most of them on an older 3.2 GHz Pentium IV with 2GB of RAM). Most of the programs are written in Matlab (some in Fortran ). Recall that the reported CPU times have two components: (1) Pre-computation (inversion, LU-factorization, constructing a Schur complement) (2) Time for a single solve once pre-computation is completed
47 1D numerical examples speed of HSS matvec (at accuracy 1 1 ) Logarithmic kernel: u m = N ( n=1 log xm x n ) q n with x n drawn at random from [, 1]. n m Orthog poly: u m = N n=1 Sinc kernel: u m = N n=1 p k+1 (x m )p k (x n ) p k (x m )p k+1 (x n ) x m x n q n with {x n } N n=1 Gaussian nodes. sin((x m x n )πn/5) x m x n q n with (x n ) N n=1 equispaced in [ 1, 1]. 1 3 DIRECT: log problem DIRECT: orthog poly 1 2 DIRECT: sinc DIRECT: precomputed HSS: log problem HSS: orthog poly 1 1 HSS: sinc FFTPACK FFTW Note: Close to FFT speed! Break-even point with dense < 1!
48 1D numerical examples BIEs in R 2 We invert a matrix approximating the operator [A u](x) = 1 2 u(x) 1 D(x, y) u(y) ds(y), x Γ, 2 π where D is the double layer kernel associated with Laplace s equation, Γ D(x, y) = 1 2π and where Γ is either one of the countours: n(y) (x y) x y 2, Smooth star Star with corners Snake (local refinements at corners) (# oscillations N) Examples from A direct solver with O(N) complexity for integral equations on one-dimensional domains, A. Gillman, P. Young, P.G. Martinsson, 211, Frontiers of Mathematics in China.
49 1D numerical examples BIEs in R 2 Compression 1 2 Smooth star Star with corners Snake Smooth star (Helmholtz) 1 1 Inversion 1 2 Smooth star Star with corners Snake Smooth star (Helmholtz) Time in seconds N The graphs give the times required for: Computing the HSS representation of the coefficient matrix. Inverting the HSS matrix. Within each graph, the four lines correspond to the four examples considered: Smooth star Star with corners Snake Smooth star (Helmholtz)
50 1D numerical examples BIEs in R 2 Transform inverse 1 2 Smooth star Star with corners Snake Smooth star (Helmholtz) Matrix vector multiply 1 1 Smooth star Star with corners Snake data4 1 1 Time in seconds N The graphs give the times required for: Transforming the computed inverse to standard HSS format. Applying the inverse to a vector (i.e. solving a system). Within each graph, the four lines correspond to the four examples considered: Smooth star Star with corners Snake Smooth star (Helmholtz)
51 1D numerical examples BIEs in R 2 Approximation errors 1 6 Smooth star Star with corners Snake 1 5 Forwards error in inverse 1 4 Smooth star Star with corners Snake 1 A Aapprox 1 I A 1 approxa N The graphs give the error in the approximation, and the forwards error in the inverse. Within each graph, the four lines correspond to the four examples considered: Smooth star Star with corners Snake
52 1D numerical examples BIEs in R 2 Approximation errors 1 6 Smooth star Star with corners Snake Norm of inverse 1 4 Smooth star Star with corners Snake A Aapprox 1 A 1 approx N The graphs give the error in the approximation, and the norm of the inverse. Within each graph, the four lines correspond to the four examples considered: Smooth star Star with corners Snake
53 1D numerical examples BIEs in R 2 Example: An interior Helmholtz Dirichlet problem The diameter of the contour is about 2.5. An interior Helmholtz problem with Dirichlet boundary data was solved using N = 6 4 discretization points, with a prescribed accuracy of 1 1. For k = , the smallest singular value of the boundary integral operator was σ min = Time for constructing the inverse:. seconds. Error in the inverse: 1 5.
54 1D numerical examples BIEs in R Plot of σ min versus k for an interior Helmholtz problem on the smooth pentagram. The values shown were computed using a matrix of size N = 64. Each point in the graph required about 6s of CPU time.
 + n(y) (x y) 4π x y 3 σ(y) da(y) = f(x).")
55 1D numerical examples BIEs on rotationally symmetric surfaces γ Generating curve Let Γ be a surface of rotation generated by a curve γ, and consider a BIE associated with Laplace s equation: 1 (3) 2 σ(x) + n(y) (x y) 4π x y 3 σ(y) da(y) = f(x). x Γ Γ To (3), we apply the Fourier transform in the azimuthal angle (executed computationally via the FFT) and get 1 2 σ n(x) + k n (x, y) σ n (y) dl(y) = f n (x), x γ, n Z. γ Then discretize the sequence of equations on γ using the direct solvers described (with special quadratures, etc). Surface Γ We discretized the surface using 4 Fourier modes, and points on γ for a total problem size of N = 32. For typical loads, the relative error was less than 1 1 and the CPU times were T invert = 2min T solve =.3sec.

56 1D numerical examples BIEs on rotationally symmetric surfaces Work in progress (with Sijia Hao): Extension to multibody acoustic scattering: Individual scattering matrices are constructed via a relatively expensive pre-computation. Inter-body interactions are handled via the wideband FMM and an iterative solver.
57 1D numerical examples BIEs on rotationally symmetric surfaces Work in progress (with Sijia Hao): Extension to multibody acoustic scattering: Individual scattering matrices are constructed via a relatively expensive pre-computation. Inter-body interactions are handled via the wideband FMM and an iterative solver.
58 Extension to problems on 2D domain As a model problem we consider a single layer potential on a deformed torus: [Aσ](x) = σ(x) + log x y σ(y) da(y), y Γ, where Γ is the domain Γ The domain in physical space This is not rotationally symmetric.
59 Performance of direct solver for the torus domain Time in seconds Compression Inversion Trans. Inv. Matvec e 6 N e 5 N 3/ Observe that for a BIE with N = 25 6, the inverse can be applied in. seconds. The asymptotic complexity is: N Inversion step: Application of the inverse: O(N 1.5 ) (with small scaling constant) O(N)
60 1 2 A A approx I A 1 approxa Errors for the same problem as the previous slide. N
61 A (useful) curious fact: The inversion procedure computationally constructs a Nyström discretization of the domain at each of the levels.
62 The domain in physical space
63 The domain in physical space level The reduced matrix represents a Nyström discretization supported on the panels shown.
64 The domain in physical space level The reduced matrix represents a Nyström discretization supported on the panels shown.
65 The domain in physical space level The reduced matrix represents a Nyström discretization supported on the panels shown.
66 The domain in physical space level The reduced matrix represents a Nyström discretization supported on the panels shown.
67 The domain in physical space level The reduced matrix represents a Nyström discretization supported on the panels shown.
68 The domain in physical space level The reduced matrix represents a Nyström discretization supported on the panels shown.
69 The domain in parameter space The reduced matrix represents a Nyström discretization supported on the panels shown.
70 The domain in parameter space level The reduced matrix represents a Nyström discretization supported on the panels shown.
71 The domain in parameter space level The reduced matrix represents a Nyström discretization supported on the panels shown.
72 The domain in parameter space level The reduced matrix represents a Nyström discretization supported on the panels shown.
73 The domain in parameter space level The reduced matrix represents a Nyström discretization supported on the panels shown.
74 The domain in parameter space level The reduced matrix represents a Nyström discretization supported on the panels shown.
75 The domain in parameter space level The reduced matrix represents a Nyström discretization supported on the panels shown.
.")
76 The code for the torus domain was based on a binary tree that partitioned the domain in parameter space. This leads to high efficiency when it works, but is not very generic. For a more robust code, we instead construct a binary tree in physical space: For regular surfaces, the resulting oct-tree is sparsely populated, and interactions rank max out at O(N 1/2 ). The complexity therefore remains: Inversion step: Application of the inverse: O(N 1.5 ) (with small scaling constant) O(N)

77 Such a code has been implemented and tested on model problems such as molecular surfaces and aircraft fuselages.
: 15 min Cost of applying the inverse:.")
78 Example: Triangulated aircraft Computation carried out by Denis Gueyffier at Courant. Laplace s equation. 2 triangles. Standard office desktop. Cost of very primitive inversion scheme (low accuracy, etc.): 15 min Cost of applying the inverse:.2 sec From Fast direct solvers for integral equations in complex three-dimensional domains, by Greengard, Gueyffier, Martinsson, Rokhlin, Acta Numerica 2.
 flap corresponds to a rank-15 update and can be done in a fraction of a second.")
79 Observation: Local updates to the geometry are very cheap. Adding a (not so very aerodynamic) flap corresponds to a rank-15 update and can be done in a fraction of a second. Note: While our codes are very primitive at this point, there exist extensive H/H 2 -matrix based libraries with better asymptotic estimates for inversion.
80 Comments on fast direct solvers for BIEs in R 3 The cost of applying a computed inverse is excellent a fraction of a second even for problems with 1 5 or so degrees of freedom. Storage requirements are acceptable O(N) with a modest constant of scaling. The cost of the inversion/factorization is O(N 1.5 ) and is not entirely satisfactory. Can it be reduced to O(N) or O(N log N)? Recall that the problem is that the interaction of a block with m discretization points scales as O(m.5 ) as m grows. It is inversion/factorization/matrix-matrix multiplications of dense matrices of size O(m.5 ) O(m.5 ) that bring us down. (In the 1D case, these matrices were of size O(log m) O(log m).) Cure: It turns out these dense matrices are themselves HSS matrices! Codes exploiting this fact to construct linear complexity direct solvers for surface BIEs are currently being developed.
81 The recursion on dimension method described is very similar to nested dissection methods for inverting/factoring sparse matrices arising from the finite element or finite difference discretization of an elliptic PDE. To illustrate, consider a square regular grid for the five-point stencil on a rectangular domain with N = 2n n grid points. Ω 1 Ω 2 The coefficient matrix can be split as before A = A 11 A 12 A 21 A 22 The ranks of A 12 and A 21 are n = O(N.5 ). Moreover, A 12 and A 21 consist mostly of zeros in this case!
82 The recursion on dimension method described is very similar to nested dissection methods for inverting/factoring sparse matrices arising from the finite element or finite difference discretization of an elliptic PDE. To illustrate, consider a square regular grid for the five-point stencil on a rectangular domain with N = 2n n grid points. Ω 2 Ω 1 Ω 3 The coefficient matrix is tessellated as A = A 11 A 12 A 21 A 22 A 23 A 32 A 33 Now A 12, A t 21, A t 23, and A 32 have n = O(N.5 ) columns. Having rank O(N.5 ) is good, but being of size O(N.5 ) is better!
83 Ω 2 Ω 1 Ω 3 The coefficient matrix is tessellated as A = A 11 A 12 A 21 A 22 A 23 A 32 A 33 To execute nested dissection, the recursive step consists of 3 tasks: Compute the factorization L 11 U 11 = A 11. Compute the factorization L 33 U 33 = A 33. Compute the factorization L 22 U 22 = A 22 A 21 A 1 11 A 12 A 23 A 1 33 A 32. }{{} This is an HSS matrix!
84 Ω 2 Ω 1 Ω 3 The coefficient matrix is tessellated as A = A 11 A 12 A 12 A 22 A 23 A 32 A 33 To execute nested dissection, the recursive step consists of 3 tasks: Compute the factorization L 11 U 11 = A 11. Compute the factorization L 33 U 33 = A 33. Compute the factorization L 22 U 22 = A 22 A 21 A 1 11 A 12 A 23 A 1 33 A 32. }{{} This is an HSS matrix!
85 Example: Inversion of a Finite Element Matrix (with A. Gillman) A grid conduction problem A is a five-point stencil very large, sparse. Each link has conductivity drawn from a uniform random distribution on [1, 2]. Solution strategy: Perform nested dissection on the grid. Use HSS algebra to accelerate all computations involving dense matrices larger than a certain threshold. Total complexity is O(N) (as compared to O(N 1.5 ) for classical nested dissection).
86 T solve N T solve T apply M e 3 e 4 (sec) (sec) (MB) e e Time required to compute all Schur complements ( set-up time ) T apply Time required to apply a Dirichlet-to-Neumann op. (of size 4 N 4 N) M e 3 e 4 Memory required to store the solution operator The l 2 -error in the vector à 1 nn r where r is a unit vector of random direction. The l 2 -error in the first column of à 1 nn.
87 Related work: Solvers of this type have attracted much attention recently, including: H-LU factorization of coefficient matrices by L. Grasedyck, S. LeBorne, S.Börm, et al. (26) Multifrontal methods accelerated by HSS-matrix algebra: J. Xia, S. Chandrasekaran, S. Li. (2) Currently large effort at Purdue in this direction. (J. Xia, M. V. de Hoop, et al). Massive computations on seismic wave propagation. L. Ying & P. Schmitz general meshes in 2D, Cartesian meshes in 3D, etc. (21).

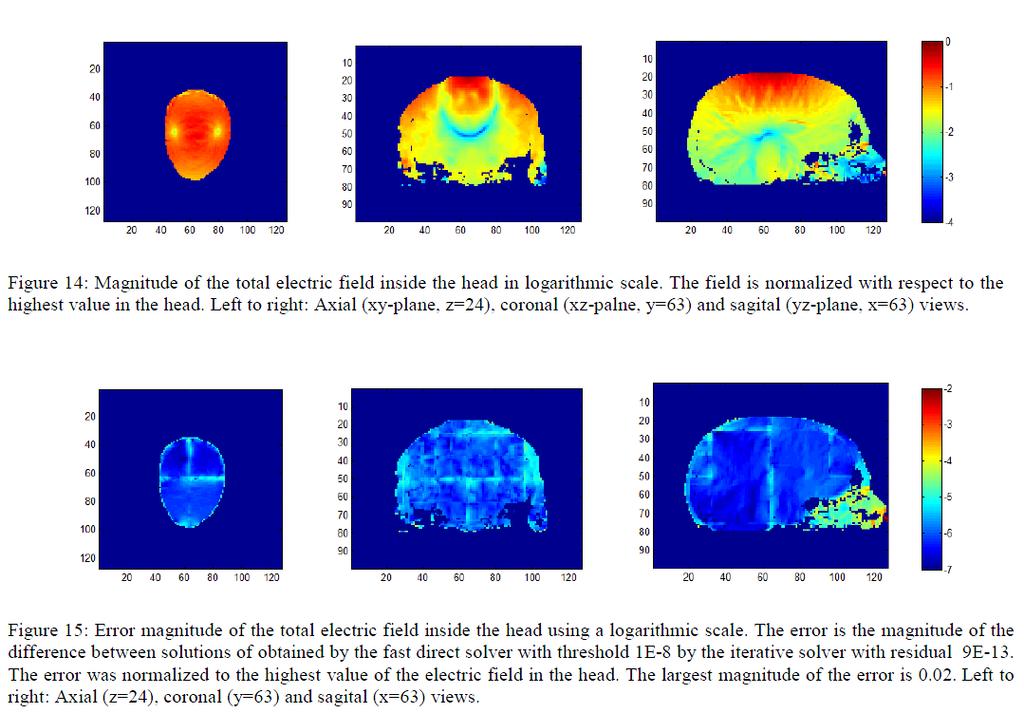
88 Accelerated nested dissection on grids in R 3 We have implemented the accelerated nested dissection method to solve the electrostatics problems arising in transcranial magnetic stimulation (TMS). This environment is characterized by: There is time to preprocess a given geometry. Given a load, the solution should be found instantaneously. Joint work with Frantisek Cajko, Luis Gomez, Eric Michielssen, and, Luis Hernandez-Garcia of U. Michigan.
89
90 Numerical results: Single CPU desktop. Local accuracy was 1. Our benchmark was the Pardiso package in Intel s MKL. N Storage (MB) Factorization (sec) Solution (sec) Pardiso FDS Pardiso FDS Pardiso FDS 32 3 = = = = = Note: Direct solvers require substantially more memory than, e.g., multigrid. Note: The gain over Pardiso is modest for small problem sizes, but: FDS has better asymptotic scaling as N grows. FDS is better suited for large-scale parallelization. FDS will be extremely fast for pure boundary value problems (this is speculation... ) The FDS methods are still fairly immature; improvements are to be expected.
91
92 There may be short-cuts to finding the inverses... Recent work indicates that randomized sampling could be used to very rapidly find a data-sparse representation of a matrix (in H / H 2 / HSS /... format). The idea is to extract information by applying the operator to be compressed to a sequence of random vectors. In the present context, applying the inverse of course corresponds simply to a linear solve. Fast construction of hierarchical matrix representation from matrix-vector multiplication, L. Lin, J. Lu, L. Ying., J. of Computational Physics, 23(1), 211. P.G. Martinsson, A fast randomized algorithm for computing a Hierarchically Semi-Separable representation of a matrix. SIAM J. on Matrix Analysis and Appl., 32(4), pp , 211. For more on randomized sampling in numerical linear algebra, see: N. Halko, P.G. Martinsson, J. Tropp, Finding structure with randomness: Probabilistic algorithms for constructing approximate matrix decompositions. SIAM Review, 53(2), 211. pp
93 Question: When are the boundary operators compressible in HSS form? Electrostatics on a network of resistors. The object computed is the lattice Neumannto-Dirichlet boundary operator. It maps a vector of fluxes on the blue nodes to a vector of potentials on the blue nodes. Question: How compressible is the N2D operator? Case A: Constant conductivities standard 4/-1/-1/-1/-1 five-point stencil. Case B: Random conductivities drawn uniformly from the interval [1, 2]. Case C: Periodic oscillations high aspect ratio. Case D: Random cuts 5% of the bars were cut, the others have unit conductivity. Case E: Large cracks.
94 Case C periodic oscillations: x 2 x x x Conductivities Typical solution field
95 Case E large cracks: Sink Source x x Geometry Permissible solution field
96 Memory requirements in floats per degree of freedom: All operators were compressed to a relative accuracy of 1 1. N side N side N side N side N side = 1 = 2 = 4 = = 16 General matrix Case A (constant conductivities) Case B (periodic conductivities) Case C (random conductivities) Case D (random cuts) Case E (cracks) Key observations: The amount of memory required is essentially problem independent. Almost perfect linear scaling.
97 A conduction problem on a perforated domain Geometry Potential The Neumann-to-Dirichlet operator for the exterior boundary was computed. The boundary was split into 44 panels, with 26 Gaussian quadrature nodes on each one. This gives a relative accuracy of 1 1 for evaluating fields at points very close to the boundary (up to.5% of the side-length removed). Storing the N2D operator (in a data-sparse format) requires 12 floats per degree of freedom.
98 A conduction problem on a perforated domain close to percolation Geometry Potential The Neumann-to-Dirichlet operator for the exterior boundary was computed. The boundary was split into 44 panels, with 26 Gaussian quadrature nodes on each one. This gives a relative accuracy of 1 1 for evaluating fields at points very close to the boundary (up to.5% of the side-length removed). Storing the N2D operator (in a data-sparse format) requires 11 floats per degree of freedom.
99 Question: When are the boundary operators compressible in HSS form? Apparent answer: Almost always for non-oscillatory problems. (?) Dense matrices that arise in numerical algorithms for elliptic PDEs are surprisingly well suited to the HSS-representation. The format is robust to: Irregular grids. PDEs with non-smooth variable coefficients. Inversion, LU-factorization, matrix-matrix-multiplies, etc. For oscillatory problems, the ranks grow as the wave-length of the problem is shrunk relative to the size of the geometry, which eventually renders the direct solvers prohibitively expensive. However, the methodology remains efficient for surprisingly small wave-lengths. Some supporting theory and intuitive arguments exist, but the observed performance still exceeds what one would expect, both in terms of the range of applicability and what the actual ranks should be. (At least what I would expect!)
100 Assertions: Fast direct solvers excel for problems on 1D domains. (They should become the default.) Integral operators on the line. Boundary Integral Equations in R 2. Boundary Integral Equations on rotationally symmetric surfaces in R 3. Existing fast direct solvers for finite element matrices associated with elliptic PDEs in R 2 work very well. In R 3, they can be game-changing in specialized environments. Predictions: For BIEs associated with non-oscillatory problems on surfaces in R 3, the complexity will be reduced from O(N(log N) p ) to O(N), with a modest scaling constant. Randomized methods will prove enormously helpful. They have already demonstrated their worth in large scale linear algebra. Direct solvers for scattering problems will find users, even if expensive. O(N 1.5 ) or O(N 2 ) flop counts may be OK, provided parallelization is possible. Direct solvers will provide a fantastic tool for numerical homogenization. Open questions: How efficient can direct solvers be for volume problems in 3D? Are O(N) direct solvers for highly oscillatory problems possible?
Fast numerical methods for solving linear PDEs
 Fast numerical methods for solving linear PDEs P.G. Martinsson, The University of Colorado at Boulder Acknowledgements: Some of the work presented is joint work with Vladimir Rokhlin and Mark Tygert at
Fast numerical methods for solving linear PDEs P.G. Martinsson, The University of Colorado at Boulder Acknowledgements: Some of the work presented is joint work with Vladimir Rokhlin and Mark Tygert at
Rapid evaluation of electrostatic interactions in multi-phase media
 Rapid evaluation of electrostatic interactions in multi-phase media P.G. Martinsson, The University of Colorado at Boulder Acknowledgements: Some of the work presented is joint work with Mark Tygert and
Rapid evaluation of electrostatic interactions in multi-phase media P.G. Martinsson, The University of Colorado at Boulder Acknowledgements: Some of the work presented is joint work with Mark Tygert and
Lecture 1: Introduction
 CBMS Conference on Fast Direct Solvers Dartmouth College June June 7, 4 Lecture : Introduction Gunnar Martinsson The University of Colorado at Boulder Research support by: Many thanks to everyone who made
CBMS Conference on Fast Direct Solvers Dartmouth College June June 7, 4 Lecture : Introduction Gunnar Martinsson The University of Colorado at Boulder Research support by: Many thanks to everyone who made
Fast direct solvers for elliptic PDEs
 Fast direct solvers for elliptic PDEs Gunnar Martinsson The University of Colorado at Boulder PhD Students: Tracy Babb Adrianna Gillman (now at Dartmouth) Nathan Halko (now at Spot Influence, LLC) Sijia
Fast direct solvers for elliptic PDEs Gunnar Martinsson The University of Colorado at Boulder PhD Students: Tracy Babb Adrianna Gillman (now at Dartmouth) Nathan Halko (now at Spot Influence, LLC) Sijia
Lecture 8: Boundary Integral Equations
 CBMS Conference on Fast Direct Solvers Dartmouth College June 23 June 27, 2014 Lecture 8: Boundary Integral Equations Gunnar Martinsson The University of Colorado at Boulder Research support by: Consider
CBMS Conference on Fast Direct Solvers Dartmouth College June 23 June 27, 2014 Lecture 8: Boundary Integral Equations Gunnar Martinsson The University of Colorado at Boulder Research support by: Consider
A direct solver for elliptic PDEs in three dimensions based on hierarchical merging of Poincaré-Steklov operators
 (1) A direct solver for elliptic PDEs in three dimensions based on hierarchical merging of Poincaré-Steklov operators S. Hao 1, P.G. Martinsson 2 Abstract: A numerical method for variable coefficient elliptic
(1) A direct solver for elliptic PDEs in three dimensions based on hierarchical merging of Poincaré-Steklov operators S. Hao 1, P.G. Martinsson 2 Abstract: A numerical method for variable coefficient elliptic
A Fast Direct Solver for a Class of Elliptic Partial Differential Equations
 J Sci Comput (2009) 38: 316 330 DOI 101007/s10915-008-9240-6 A Fast Direct Solver for a Class of Elliptic Partial Differential Equations Per-Gunnar Martinsson Received: 20 September 2007 / Revised: 30
J Sci Comput (2009) 38: 316 330 DOI 101007/s10915-008-9240-6 A Fast Direct Solver for a Class of Elliptic Partial Differential Equations Per-Gunnar Martinsson Received: 20 September 2007 / Revised: 30
Fast matrix algebra for dense matrices with rank-deficient off-diagonal blocks
 CHAPTER 2 Fast matrix algebra for dense matrices with rank-deficient off-diagonal blocks Chapter summary: The chapter describes techniques for rapidly performing algebraic operations on dense matrices
CHAPTER 2 Fast matrix algebra for dense matrices with rank-deficient off-diagonal blocks Chapter summary: The chapter describes techniques for rapidly performing algebraic operations on dense matrices
Chapter 1 Numerical homogenization via approximation of the solution operator
 Chapter Numerical homogenization via approximation of the solution operator A. Gillman, P. Young, and P.G. Martinsson Abstract The paper describes techniques for constructing simplified models for problems
Chapter Numerical homogenization via approximation of the solution operator A. Gillman, P. Young, and P.G. Martinsson Abstract The paper describes techniques for constructing simplified models for problems
A fast randomized algorithm for computing a Hierarchically Semi-Separable representation of a matrix
 A fast randomized algorithm for computing a Hierarchically Semi-Separable representation of a matrix P.G. Martinsson, Department of Applied Mathematics, University of Colorado at Boulder Abstract: Randomized
A fast randomized algorithm for computing a Hierarchically Semi-Separable representation of a matrix P.G. Martinsson, Department of Applied Mathematics, University of Colorado at Boulder Abstract: Randomized
Lecture 2: The Fast Multipole Method
 CBMS Conference on Fast Direct Solvers Dartmouth College June 23 June 27, 2014 Lecture 2: The Fast Multipole Method Gunnar Martinsson The University of Colorado at Boulder Research support by: Recall:
CBMS Conference on Fast Direct Solvers Dartmouth College June 23 June 27, 2014 Lecture 2: The Fast Multipole Method Gunnar Martinsson The University of Colorado at Boulder Research support by: Recall:
A direct solver for variable coefficient elliptic PDEs discretized via a composite spectral collocation method Abstract: Problem formulation.
 A direct solver for variable coefficient elliptic PDEs discretized via a composite spectral collocation method P.G. Martinsson, Department of Applied Mathematics, University of Colorado at Boulder Abstract:
A direct solver for variable coefficient elliptic PDEs discretized via a composite spectral collocation method P.G. Martinsson, Department of Applied Mathematics, University of Colorado at Boulder Abstract:
MULTI-LAYER HIERARCHICAL STRUCTURES AND FACTORIZATIONS
 MULTI-LAYER HIERARCHICAL STRUCTURES AND FACTORIZATIONS JIANLIN XIA Abstract. We propose multi-layer hierarchically semiseparable MHS structures for the fast factorizations of dense matrices arising from
MULTI-LAYER HIERARCHICAL STRUCTURES AND FACTORIZATIONS JIANLIN XIA Abstract. We propose multi-layer hierarchically semiseparable MHS structures for the fast factorizations of dense matrices arising from
Fast Structured Spectral Methods
 Spectral methods HSS structures Fast algorithms Conclusion Fast Structured Spectral Methods Yingwei Wang Department of Mathematics, Purdue University Joint work with Prof Jie Shen and Prof Jianlin Xia
Spectral methods HSS structures Fast algorithms Conclusion Fast Structured Spectral Methods Yingwei Wang Department of Mathematics, Purdue University Joint work with Prof Jie Shen and Prof Jianlin Xia
A direct solver with O(N) complexity for integral equations on one-dimensional domains
 complexity for integral equations on one-dimensional domains") Front Math China DOI 101007/s11464-012-0188-3 A direct solver with O(N) complexity for integral equations on one-dimensional domains Adrianna GILLMAN, Patrick M YOUNG, Per-Gunnar MARTINSSON Department
Front Math China DOI 101007/s11464-012-0188-3 A direct solver with O(N) complexity for integral equations on one-dimensional domains Adrianna GILLMAN, Patrick M YOUNG, Per-Gunnar MARTINSSON Department
A HIGH-ORDER ACCURATE ACCELERATED DIRECT SOLVER FOR ACOUSTIC SCATTERING FROM SURFACES
 A HIGH-ORDER ACCURATE ACCELERATED DIRECT SOLVER FOR ACOUSTIC SCATTERING FROM SURFACES JAMES BREMER,, ADRIANNA GILLMAN, AND PER-GUNNAR MARTINSSON Abstract. We describe an accelerated direct solver for the
A HIGH-ORDER ACCURATE ACCELERATED DIRECT SOLVER FOR ACOUSTIC SCATTERING FROM SURFACES JAMES BREMER,, ADRIANNA GILLMAN, AND PER-GUNNAR MARTINSSON Abstract. We describe an accelerated direct solver for the
Research Statement. James Bremer Department of Mathematics, University of California, Davis
 Research Statement James Bremer Department of Mathematics, University of California, Davis Email: bremer@math.ucdavis.edu Webpage: https.math.ucdavis.edu/ bremer I work in the field of numerical analysis,
Research Statement James Bremer Department of Mathematics, University of California, Davis Email: bremer@math.ucdavis.edu Webpage: https.math.ucdavis.edu/ bremer I work in the field of numerical analysis,
(1) u i = g(x i, x j )q j, i = 1, 2,..., N, where g(x, y) is the interaction potential of electrostatics in the plane. 0 x = y.
 u i = g(x i, x j )q j, i = 1, 2,..., N, where g(x, y) is the interaction potential of electrostatics in the plane. 0 x = y.") Encyclopedia entry on Fast Multipole Methods. Per-Gunnar Martinsson, University of Colorado at Boulder, August 2012 Short definition. The Fast Multipole Method (FMM) is an algorithm for rapidly evaluating
Encyclopedia entry on Fast Multipole Methods. Per-Gunnar Martinsson, University of Colorado at Boulder, August 2012 Short definition. The Fast Multipole Method (FMM) is an algorithm for rapidly evaluating
AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences)
") AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences) Lecture 19: Computing the SVD; Sparse Linear Systems Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical
AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences) Lecture 19: Computing the SVD; Sparse Linear Systems Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical
The Fast Multipole Method and other Fast Summation Techniques
 The Fast Multipole Method and other Fast Summation Techniques Gunnar Martinsson The University of Colorado at Boulder (The factor of 1/2π is suppressed.) Problem definition: Consider the task of evaluation
The Fast Multipole Method and other Fast Summation Techniques Gunnar Martinsson The University of Colorado at Boulder (The factor of 1/2π is suppressed.) Problem definition: Consider the task of evaluation
An H-LU Based Direct Finite Element Solver Accelerated by Nested Dissection for Large-scale Modeling of ICs and Packages
 PIERS ONLINE, VOL. 6, NO. 7, 2010 679 An H-LU Based Direct Finite Element Solver Accelerated by Nested Dissection for Large-scale Modeling of ICs and Packages Haixin Liu and Dan Jiao School of Electrical
PIERS ONLINE, VOL. 6, NO. 7, 2010 679 An H-LU Based Direct Finite Element Solver Accelerated by Nested Dissection for Large-scale Modeling of ICs and Packages Haixin Liu and Dan Jiao School of Electrical
Multipole-Based Preconditioners for Sparse Linear Systems.
 Multipole-Based Preconditioners for Sparse Linear Systems. Ananth Grama Purdue University. Supported by the National Science Foundation. Overview Summary of Contributions Generalized Stokes Problem Solenoidal
Multipole-Based Preconditioners for Sparse Linear Systems. Ananth Grama Purdue University. Supported by the National Science Foundation. Overview Summary of Contributions Generalized Stokes Problem Solenoidal
Multilevel low-rank approximation preconditioners Yousef Saad Department of Computer Science and Engineering University of Minnesota
 Multilevel low-rank approximation preconditioners Yousef Saad Department of Computer Science and Engineering University of Minnesota SIAM CSE Boston - March 1, 2013 First: Joint work with Ruipeng Li Work
Multilevel low-rank approximation preconditioners Yousef Saad Department of Computer Science and Engineering University of Minnesota SIAM CSE Boston - March 1, 2013 First: Joint work with Ruipeng Li Work
arxiv: v3 [math.na] 30 Jun 2018
![arxiv: v3 [math.na] 30 Jun 2018](/thumbs/94/121101717.jpg "arxiv: v3 [math.na] 30 Jun 2018") An adaptive high order direct solution technique for elliptic boundary value problems P. Geldermans and A. Gillman Department of Computational and Applied Mathematics, Rice University arxiv:70.08787v3
An adaptive high order direct solution technique for elliptic boundary value problems P. Geldermans and A. Gillman Department of Computational and Applied Mathematics, Rice University arxiv:70.08787v3
An Adaptive Hierarchical Matrix on Point Iterative Poisson Solver
 Malaysian Journal of Mathematical Sciences 10(3): 369 382 (2016) MALAYSIAN JOURNAL OF MATHEMATICAL SCIENCES Journal homepage: http://einspem.upm.edu.my/journal An Adaptive Hierarchical Matrix on Point
Malaysian Journal of Mathematical Sciences 10(3): 369 382 (2016) MALAYSIAN JOURNAL OF MATHEMATICAL SCIENCES Journal homepage: http://einspem.upm.edu.my/journal An Adaptive Hierarchical Matrix on Point
Fast Multipole BEM for Structural Acoustics Simulation
 Fast Boundary Element Methods in Industrial Applications Fast Multipole BEM for Structural Acoustics Simulation Matthias Fischer and Lothar Gaul Institut A für Mechanik, Universität Stuttgart, Germany
Fast Boundary Element Methods in Industrial Applications Fast Multipole BEM for Structural Acoustics Simulation Matthias Fischer and Lothar Gaul Institut A für Mechanik, Universität Stuttgart, Germany
Scientific Computing with Case Studies SIAM Press, Lecture Notes for Unit VII Sparse Matrix
 Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit VII Sparse Matrix Computations Part 1: Direct Methods Dianne P. O Leary c 2008
Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit VII Sparse Matrix Computations Part 1: Direct Methods Dianne P. O Leary c 2008
Numerical Methods I Non-Square and Sparse Linear Systems
 Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
Matrix Assembly in FEA
 Matrix Assembly in FEA 1 In Chapter 2, we spoke about how the global matrix equations are assembled in the finite element method. We now want to revisit that discussion and add some details. For example,
Matrix Assembly in FEA 1 In Chapter 2, we spoke about how the global matrix equations are assembled in the finite element method. We now want to revisit that discussion and add some details. For example,
Math 671: Tensor Train decomposition methods
 Math 671: Eduardo Corona 1 1 University of Michigan at Ann Arbor December 8, 2016 Table of Contents 1 Preliminaries and goal 2 Unfolding matrices for tensorized arrays The Tensor Train decomposition 3
Math 671: Eduardo Corona 1 1 University of Michigan at Ann Arbor December 8, 2016 Table of Contents 1 Preliminaries and goal 2 Unfolding matrices for tensorized arrays The Tensor Train decomposition 3
J.I. Aliaga 1 M. Bollhöfer 2 A.F. Martín 1 E.S. Quintana-Ortí 1. March, 2009
 Parallel Preconditioning of Linear Systems based on ILUPACK for Multithreaded Architectures J.I. Aliaga M. Bollhöfer 2 A.F. Martín E.S. Quintana-Ortí Deparment of Computer Science and Engineering, Univ.
Parallel Preconditioning of Linear Systems based on ILUPACK for Multithreaded Architectures J.I. Aliaga M. Bollhöfer 2 A.F. Martín E.S. Quintana-Ortí Deparment of Computer Science and Engineering, Univ.
Sparse factorization using low rank submatrices. Cleve Ashcraft LSTC 2010 MUMPS User Group Meeting April 15-16, 2010 Toulouse, FRANCE
 Sparse factorization using low rank submatrices Cleve Ashcraft LSTC cleve@lstc.com 21 MUMPS User Group Meeting April 15-16, 21 Toulouse, FRANCE ftp.lstc.com:outgoing/cleve/mumps1 Ashcraft.pdf 1 LSTC Livermore
Sparse factorization using low rank submatrices Cleve Ashcraft LSTC cleve@lstc.com 21 MUMPS User Group Meeting April 15-16, 21 Toulouse, FRANCE ftp.lstc.com:outgoing/cleve/mumps1 Ashcraft.pdf 1 LSTC Livermore
An adaptive fast multipole boundary element method for the Helmholtz equation
 An adaptive fast multipole boundary element method for the Helmholtz equation Vincenzo Mallardo 1, Claudio Alessandri 1, Ferri M.H. Aliabadi 2 1 Department of Architecture, University of Ferrara, Italy
An adaptive fast multipole boundary element method for the Helmholtz equation Vincenzo Mallardo 1, Claudio Alessandri 1, Ferri M.H. Aliabadi 2 1 Department of Architecture, University of Ferrara, Italy
Fast Matrix Computations via Randomized Sampling. Gunnar Martinsson, The University of Colorado at Boulder
 Fast Matrix Computations via Randomized Sampling Gunnar Martinsson, The University of Colorado at Boulder Computational science background One of the principal developments in science and engineering over
Fast Matrix Computations via Randomized Sampling Gunnar Martinsson, The University of Colorado at Boulder Computational science background One of the principal developments in science and engineering over
Sparse Linear Systems. Iterative Methods for Sparse Linear Systems. Motivation for Studying Sparse Linear Systems. Partial Differential Equations
 Sparse Linear Systems Iterative Methods for Sparse Linear Systems Matrix Computations and Applications, Lecture C11 Fredrik Bengzon, Robert Söderlund We consider the problem of solving the linear system
Sparse Linear Systems Iterative Methods for Sparse Linear Systems Matrix Computations and Applications, Lecture C11 Fredrik Bengzon, Robert Söderlund We consider the problem of solving the linear system
Fast Multipole Methods
 An Introduction to Fast Multipole Methods Ramani Duraiswami Institute for Advanced Computer Studies University of Maryland, College Park http://www.umiacs.umd.edu/~ramani Joint work with Nail A. Gumerov
An Introduction to Fast Multipole Methods Ramani Duraiswami Institute for Advanced Computer Studies University of Maryland, College Park http://www.umiacs.umd.edu/~ramani Joint work with Nail A. Gumerov
A sparse multifrontal solver using hierarchically semi-separable frontal matrices
 A sparse multifrontal solver using hierarchically semi-separable frontal matrices Pieter Ghysels Lawrence Berkeley National Laboratory Joint work with: Xiaoye S. Li (LBNL), Artem Napov (ULB), François-Henry
A sparse multifrontal solver using hierarchically semi-separable frontal matrices Pieter Ghysels Lawrence Berkeley National Laboratory Joint work with: Xiaoye S. Li (LBNL), Artem Napov (ULB), François-Henry
Fast algorithms for hierarchically semiseparable matrices
 NUMERICAL LINEAR ALGEBRA WITH APPLICATIONS Numer. Linear Algebra Appl. 2010; 17:953 976 Published online 22 December 2009 in Wiley Online Library (wileyonlinelibrary.com)..691 Fast algorithms for hierarchically
NUMERICAL LINEAR ALGEBRA WITH APPLICATIONS Numer. Linear Algebra Appl. 2010; 17:953 976 Published online 22 December 2009 in Wiley Online Library (wileyonlinelibrary.com)..691 Fast algorithms for hierarchically
Partial Left-Looking Structured Multifrontal Factorization & Algorithms for Compressed Sensing. Cinna Julie Wu
 Partial Left-Looking Structured Multifrontal Factorization & Algorithms for Compressed Sensing by Cinna Julie Wu A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor
Partial Left-Looking Structured Multifrontal Factorization & Algorithms for Compressed Sensing by Cinna Julie Wu A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor
Incomplete Cholesky preconditioners that exploit the low-rank property
 anapov@ulb.ac.be ; http://homepages.ulb.ac.be/ anapov/ 1 / 35 Incomplete Cholesky preconditioners that exploit the low-rank property (theory and practice) Artem Napov Service de Métrologie Nucléaire, Université
anapov@ulb.ac.be ; http://homepages.ulb.ac.be/ anapov/ 1 / 35 Incomplete Cholesky preconditioners that exploit the low-rank property (theory and practice) Artem Napov Service de Métrologie Nucléaire, Université
Enhancing Scalability of Sparse Direct Methods
 Journal of Physics: Conference Series 78 (007) 0 doi:0.088/7-6596/78//0 Enhancing Scalability of Sparse Direct Methods X.S. Li, J. Demmel, L. Grigori, M. Gu, J. Xia 5, S. Jardin 6, C. Sovinec 7, L.-Q.
Journal of Physics: Conference Series 78 (007) 0 doi:0.088/7-6596/78//0 Enhancing Scalability of Sparse Direct Methods X.S. Li, J. Demmel, L. Grigori, M. Gu, J. Xia 5, S. Jardin 6, C. Sovinec 7, L.-Q.
SOLVING SPARSE LINEAR SYSTEMS OF EQUATIONS. Chao Yang Computational Research Division Lawrence Berkeley National Laboratory Berkeley, CA, USA
 1 SOLVING SPARSE LINEAR SYSTEMS OF EQUATIONS Chao Yang Computational Research Division Lawrence Berkeley National Laboratory Berkeley, CA, USA 2 OUTLINE Sparse matrix storage format Basic factorization
1 SOLVING SPARSE LINEAR SYSTEMS OF EQUATIONS Chao Yang Computational Research Division Lawrence Berkeley National Laboratory Berkeley, CA, USA 2 OUTLINE Sparse matrix storage format Basic factorization
Boundary Value Problems - Solving 3-D Finite-Difference problems Jacob White
 Introduction to Simulation - Lecture 2 Boundary Value Problems - Solving 3-D Finite-Difference problems Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy Outline Reminder about
Introduction to Simulation - Lecture 2 Boundary Value Problems - Solving 3-D Finite-Difference problems Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy Outline Reminder about
c 2005 Society for Industrial and Applied Mathematics
 SIAM J. SCI. COMPUT. Vol. 26, No. 4, pp. 1389 1404 c 2005 Society for Industrial and Applied Mathematics ON THE COMPRESSION OF LOW RANK MATRICES H. CHENG, Z. GIMBUTAS, P. G. MARTINSSON, AND V. ROKHLIN
SIAM J. SCI. COMPUT. Vol. 26, No. 4, pp. 1389 1404 c 2005 Society for Industrial and Applied Mathematics ON THE COMPRESSION OF LOW RANK MATRICES H. CHENG, Z. GIMBUTAS, P. G. MARTINSSON, AND V. ROKHLIN
Green s Functions, Boundary Integral Equations and Rotational Symmetry
 Green s Functions, Boundary Integral Equations and Rotational Symmetry...or, How to Construct a Fast Solver for Stokes Equation Saibal De Advisor: Shravan Veerapaneni University of Michigan, Ann Arbor
Green s Functions, Boundary Integral Equations and Rotational Symmetry...or, How to Construct a Fast Solver for Stokes Equation Saibal De Advisor: Shravan Veerapaneni University of Michigan, Ann Arbor
Lecture 18 Classical Iterative Methods
 Lecture 18 Classical Iterative Methods MIT 18.335J / 6.337J Introduction to Numerical Methods Per-Olof Persson November 14, 2006 1 Iterative Methods for Linear Systems Direct methods for solving Ax = b,
Lecture 18 Classical Iterative Methods MIT 18.335J / 6.337J Introduction to Numerical Methods Per-Olof Persson November 14, 2006 1 Iterative Methods for Linear Systems Direct methods for solving Ax = b,
Effective matrix-free preconditioning for the augmented immersed interface method
 Effective matrix-free preconditioning for the augmented immersed interface method Jianlin Xia a, Zhilin Li b, Xin Ye a a Department of Mathematics, Purdue University, West Lafayette, IN 47907, USA. E-mail:
Effective matrix-free preconditioning for the augmented immersed interface method Jianlin Xia a, Zhilin Li b, Xin Ye a a Department of Mathematics, Purdue University, West Lafayette, IN 47907, USA. E-mail:
Scientific Computing
 Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Review: From problem to parallel algorithm
 Review: From problem to parallel algorithm Mathematical formulations of interesting problems abound Poisson s equation Sources: Electrostatics, gravity, fluid flow, image processing (!) Numerical solution:
Review: From problem to parallel algorithm Mathematical formulations of interesting problems abound Poisson s equation Sources: Electrostatics, gravity, fluid flow, image processing (!) Numerical solution:
Multilevel Low-Rank Preconditioners Yousef Saad Department of Computer Science and Engineering University of Minnesota. Modelling 2014 June 2,2014
 Multilevel Low-Rank Preconditioners Yousef Saad Department of Computer Science and Engineering University of Minnesota Modelling 24 June 2,24 Dedicated to Owe Axelsson at the occasion of his 8th birthday
Multilevel Low-Rank Preconditioners Yousef Saad Department of Computer Science and Engineering University of Minnesota Modelling 24 June 2,24 Dedicated to Owe Axelsson at the occasion of his 8th birthday
5.1 Banded Storage. u = temperature. The five-point difference operator. uh (x, y + h) 2u h (x, y)+u h (x, y h) uh (x + h, y) 2u h (x, y)+u h (x h, y)
 2u h (x, y)+u h (x, y h) uh (x + h, y) 2u h (x, y)+u h (x h, y)") 5.1 Banded Storage u = temperature u= u h temperature at gridpoints u h = 1 u= Laplace s equation u= h u = u h = grid size u=1 The five-point difference operator 1 u h =1 uh (x + h, y) 2u h (x, y)+u h
5.1 Banded Storage u = temperature u= u h temperature at gridpoints u h = 1 u= Laplace s equation u= h u = u h = grid size u=1 The five-point difference operator 1 u h =1 uh (x + h, y) 2u h (x, y)+u h
Fast multipole boundary element method for the analysis of plates with many holes
 Arch. Mech., 59, 4 5, pp. 385 401, Warszawa 2007 Fast multipole boundary element method for the analysis of plates with many holes J. PTASZNY, P. FEDELIŃSKI Department of Strength of Materials and Computational
Arch. Mech., 59, 4 5, pp. 385 401, Warszawa 2007 Fast multipole boundary element method for the analysis of plates with many holes J. PTASZNY, P. FEDELIŃSKI Department of Strength of Materials and Computational
FAST STRUCTURED EIGENSOLVER FOR DISCRETIZED PARTIAL DIFFERENTIAL OPERATORS ON GENERAL MESHES
 Proceedings of the Project Review, Geo-Mathematical Imaging Group Purdue University, West Lafayette IN, Vol. 1 2012 pp. 123-132. FAST STRUCTURED EIGENSOLVER FOR DISCRETIZED PARTIAL DIFFERENTIAL OPERATORS
Proceedings of the Project Review, Geo-Mathematical Imaging Group Purdue University, West Lafayette IN, Vol. 1 2012 pp. 123-132. FAST STRUCTURED EIGENSOLVER FOR DISCRETIZED PARTIAL DIFFERENTIAL OPERATORS
A Hybrid Method for the Wave Equation. beilina
 A Hybrid Method for the Wave Equation http://www.math.unibas.ch/ beilina 1 The mathematical model The model problem is the wave equation 2 u t 2 = (a 2 u) + f, x Ω R 3, t > 0, (1) u(x, 0) = 0, x Ω, (2)
A Hybrid Method for the Wave Equation http://www.math.unibas.ch/ beilina 1 The mathematical model The model problem is the wave equation 2 u t 2 = (a 2 u) + f, x Ω R 3, t > 0, (1) u(x, 0) = 0, x Ω, (2)
Algebraic Multigrid as Solvers and as Preconditioner
 Ò Algebraic Multigrid as Solvers and as Preconditioner Domenico Lahaye domenico.lahaye@cs.kuleuven.ac.be http://www.cs.kuleuven.ac.be/ domenico/ Department of Computer Science Katholieke Universiteit Leuven
Ò Algebraic Multigrid as Solvers and as Preconditioner Domenico Lahaye domenico.lahaye@cs.kuleuven.ac.be http://www.cs.kuleuven.ac.be/ domenico/ Department of Computer Science Katholieke Universiteit Leuven
Randomized algorithms for the low-rank approximation of matrices
 Randomized algorithms for the low-rank approximation of matrices Yale Dept. of Computer Science Technical Report 1388 Edo Liberty, Franco Woolfe, Per-Gunnar Martinsson, Vladimir Rokhlin, and Mark Tygert
Randomized algorithms for the low-rank approximation of matrices Yale Dept. of Computer Science Technical Report 1388 Edo Liberty, Franco Woolfe, Per-Gunnar Martinsson, Vladimir Rokhlin, and Mark Tygert
Fast and accurate methods for the discretization of singular integral operators given on surfaces
 Fast and accurate methods for the discretization of singular integral operators given on surfaces James Bremer University of California, Davis March 15, 2018 This is joint work with Zydrunas Gimbutas (NIST
Fast and accurate methods for the discretization of singular integral operators given on surfaces James Bremer University of California, Davis March 15, 2018 This is joint work with Zydrunas Gimbutas (NIST
A Randomized Algorithm for the Approximation of Matrices
 A Randomized Algorithm for the Approximation of Matrices Per-Gunnar Martinsson, Vladimir Rokhlin, and Mark Tygert Technical Report YALEU/DCS/TR-36 June 29, 2006 Abstract Given an m n matrix A and a positive
A Randomized Algorithm for the Approximation of Matrices Per-Gunnar Martinsson, Vladimir Rokhlin, and Mark Tygert Technical Report YALEU/DCS/TR-36 June 29, 2006 Abstract Given an m n matrix A and a positive
A randomized algorithm for approximating the SVD of a matrix
 A randomized algorithm for approximating the SVD of a matrix Joint work with Per-Gunnar Martinsson (U. of Colorado) and Vladimir Rokhlin (Yale) Mark Tygert Program in Applied Mathematics Yale University
A randomized algorithm for approximating the SVD of a matrix Joint work with Per-Gunnar Martinsson (U. of Colorado) and Vladimir Rokhlin (Yale) Mark Tygert Program in Applied Mathematics Yale University
Normalized power iterations for the computation of SVD
 Normalized power iterations for the computation of SVD Per-Gunnar Martinsson Department of Applied Mathematics University of Colorado Boulder, Co. Per-gunnar.Martinsson@Colorado.edu Arthur Szlam Courant
Normalized power iterations for the computation of SVD Per-Gunnar Martinsson Department of Applied Mathematics University of Colorado Boulder, Co. Per-gunnar.Martinsson@Colorado.edu Arthur Szlam Courant
LU Factorization. Marco Chiarandini. DM559 Linear and Integer Programming. Department of Mathematics & Computer Science University of Southern Denmark
 DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
Solving PDEs with CUDA Jonathan Cohen
 Solving PDEs with CUDA Jonathan Cohen jocohen@nvidia.com NVIDIA Research PDEs (Partial Differential Equations) Big topic Some common strategies Focus on one type of PDE in this talk Poisson Equation Linear
Solving PDEs with CUDA Jonathan Cohen jocohen@nvidia.com NVIDIA Research PDEs (Partial Differential Equations) Big topic Some common strategies Focus on one type of PDE in this talk Poisson Equation Linear
Numerical Solution Techniques in Mechanical and Aerospace Engineering
 Numerical Solution Techniques in Mechanical and Aerospace Engineering Chunlei Liang LECTURE 3 Solvers of linear algebraic equations 3.1. Outline of Lecture Finite-difference method for a 2D elliptic PDE
Numerical Solution Techniques in Mechanical and Aerospace Engineering Chunlei Liang LECTURE 3 Solvers of linear algebraic equations 3.1. Outline of Lecture Finite-difference method for a 2D elliptic PDE
Elliptic Problems / Multigrid. PHY 604: Computational Methods for Physics and Astrophysics II
 Elliptic Problems / Multigrid Summary of Hyperbolic PDEs We looked at a simple linear and a nonlinear scalar hyperbolic PDE There is a speed associated with the change of the solution Explicit methods
Elliptic Problems / Multigrid Summary of Hyperbolic PDEs We looked at a simple linear and a nonlinear scalar hyperbolic PDE There is a speed associated with the change of the solution Explicit methods
Solving PDEs with Multigrid Methods p.1
 Solving PDEs with Multigrid Methods Scott MacLachlan maclachl@colorado.edu Department of Applied Mathematics, University of Colorado at Boulder Solving PDEs with Multigrid Methods p.1 Support and Collaboration
Solving PDEs with Multigrid Methods Scott MacLachlan maclachl@colorado.edu Department of Applied Mathematics, University of Colorado at Boulder Solving PDEs with Multigrid Methods p.1 Support and Collaboration
Applications of Randomized Methods for Decomposing and Simulating from Large Covariance Matrices
 Applications of Randomized Methods for Decomposing and Simulating from Large Covariance Matrices Vahid Dehdari and Clayton V. Deutsch Geostatistical modeling involves many variables and many locations.
Applications of Randomized Methods for Decomposing and Simulating from Large Covariance Matrices Vahid Dehdari and Clayton V. Deutsch Geostatistical modeling involves many variables and many locations.
An Efficient Solver for Sparse Linear Systems based on Rank-Structured Cholesky Factorization
 An Efficient Solver for Sparse Linear Systems based on Rank-Structured Cholesky Factorization David Bindel Department of Computer Science Cornell University 15 March 2016 (TSIMF) Rank-Structured Cholesky
An Efficient Solver for Sparse Linear Systems based on Rank-Structured Cholesky Factorization David Bindel Department of Computer Science Cornell University 15 March 2016 (TSIMF) Rank-Structured Cholesky
Block Low-Rank (BLR) approximations to improve multifrontal sparse solvers
 approximations to improve multifrontal sparse solvers") Block Low-Rank (BLR) approximations to improve multifrontal sparse solvers Joint work with Patrick Amestoy, Cleve Ashcraft, Olivier Boiteau, Alfredo Buttari and Jean-Yves L Excellent, PhD started on October
Block Low-Rank (BLR) approximations to improve multifrontal sparse solvers Joint work with Patrick Amestoy, Cleve Ashcraft, Olivier Boiteau, Alfredo Buttari and Jean-Yves L Excellent, PhD started on October
Improvements for Implicit Linear Equation Solvers
 Improvements for Implicit Linear Equation Solvers Roger Grimes, Bob Lucas, Clement Weisbecker Livermore Software Technology Corporation Abstract Solving large sparse linear systems of equations is often
Improvements for Implicit Linear Equation Solvers Roger Grimes, Bob Lucas, Clement Weisbecker Livermore Software Technology Corporation Abstract Solving large sparse linear systems of equations is often
Lecture 9 Approximations of Laplace s Equation, Finite Element Method. Mathématiques appliquées (MATH0504-1) B. Dewals, C.
 B. Dewals, C.") Lecture 9 Approximations of Laplace s Equation, Finite Element Method Mathématiques appliquées (MATH54-1) B. Dewals, C. Geuzaine V1.2 23/11/218 1 Learning objectives of this lecture Apply the finite difference
Lecture 9 Approximations of Laplace s Equation, Finite Element Method Mathématiques appliquées (MATH54-1) B. Dewals, C. Geuzaine V1.2 23/11/218 1 Learning objectives of this lecture Apply the finite difference
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 11 Partial Differential Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002.
Scientific Computing: An Introductory Survey Chapter 11 Partial Differential Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002.
Numerical Methods I Solving Square Linear Systems: GEM and LU factorization
 Numerical Methods I Solving Square Linear Systems: GEM and LU factorization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 18th,
Numerical Methods I Solving Square Linear Systems: GEM and LU factorization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 18th,
Fast algorithms for dimensionality reduction and data visualization
 Fast algorithms for dimensionality reduction and data visualization Manas Rachh Yale University 1/33 Acknowledgements George Linderman (Yale) Jeremy Hoskins (Yale) Stefan Steinerberger (Yale) Yuval Kluger
Fast algorithms for dimensionality reduction and data visualization Manas Rachh Yale University 1/33 Acknowledgements George Linderman (Yale) Jeremy Hoskins (Yale) Stefan Steinerberger (Yale) Yuval Kluger
Fast Algorithms for the Computation of Oscillatory Integrals
 Fast Algorithms for the Computation of Oscillatory Integrals Emmanuel Candès California Institute of Technology EPSRC Symposium Capstone Conference Warwick Mathematics Institute, July 2009 Collaborators
Fast Algorithms for the Computation of Oscillatory Integrals Emmanuel Candès California Institute of Technology EPSRC Symposium Capstone Conference Warwick Mathematics Institute, July 2009 Collaborators
arxiv: v1 [cs.lg] 26 Jul 2017
![arxiv: v1 [cs.lg] 26 Jul 2017](/thumbs/94/121875314.jpg "arxiv: v1 [cs.lg] 26 Jul 2017") Updating Singular Value Decomposition for Rank One Matrix Perturbation Ratnik Gandhi, Amoli Rajgor School of Engineering & Applied Science, Ahmedabad University, Ahmedabad-380009, India arxiv:70708369v
Updating Singular Value Decomposition for Rank One Matrix Perturbation Ratnik Gandhi, Amoli Rajgor School of Engineering & Applied Science, Ahmedabad University, Ahmedabad-380009, India arxiv:70708369v
Aspects of Multigrid
 Aspects of Multigrid Kees Oosterlee 1,2 1 Delft University of Technology, Delft. 2 CWI, Center for Mathematics and Computer Science, Amsterdam, SIAM Chapter Workshop Day, May 30th 2018 C.W.Oosterlee (CWI)
Aspects of Multigrid Kees Oosterlee 1,2 1 Delft University of Technology, Delft. 2 CWI, Center for Mathematics and Computer Science, Amsterdam, SIAM Chapter Workshop Day, May 30th 2018 C.W.Oosterlee (CWI)
Scientific Computing: Dense Linear Systems
 Scientific Computing: Dense Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 February 9th, 2012 A. Donev (Courant Institute)
Scientific Computing: Dense Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 February 9th, 2012 A. Donev (Courant Institute)
Integral Equations Methods: Fast Algorithms and Applications
 Integral Equations Methods: Fast Algorithms and Applications Alexander Barnett (Dartmouth College), Leslie Greengard (New York University), Shidong Jiang (New Jersey Institute of Technology), Mary Catherine
Integral Equations Methods: Fast Algorithms and Applications Alexander Barnett (Dartmouth College), Leslie Greengard (New York University), Shidong Jiang (New Jersey Institute of Technology), Mary Catherine
Non-Conforming Finite Element Methods for Nonmatching Grids in Three Dimensions
 Non-Conforming Finite Element Methods for Nonmatching Grids in Three Dimensions Wayne McGee and Padmanabhan Seshaiyer Texas Tech University, Mathematics and Statistics (padhu@math.ttu.edu) Summary. In
Non-Conforming Finite Element Methods for Nonmatching Grids in Three Dimensions Wayne McGee and Padmanabhan Seshaiyer Texas Tech University, Mathematics and Statistics (padhu@math.ttu.edu) Summary. In
Finite Difference Methods for Boundary Value Problems
 Finite Difference Methods for Boundary Value Problems October 2, 2013 () Finite Differences October 2, 2013 1 / 52 Goals Learn steps to approximate BVPs using the Finite Difference Method Start with two-point
Finite Difference Methods for Boundary Value Problems October 2, 2013 () Finite Differences October 2, 2013 1 / 52 Goals Learn steps to approximate BVPs using the Finite Difference Method Start with two-point
Numerical Linear Algebra
 Numerical Linear Algebra Decompositions, numerical aspects Gerard Sleijpen and Martin van Gijzen September 27, 2017 1 Delft University of Technology Program Lecture 2 LU-decomposition Basic algorithm Cost
Numerical Linear Algebra Decompositions, numerical aspects Gerard Sleijpen and Martin van Gijzen September 27, 2017 1 Delft University of Technology Program Lecture 2 LU-decomposition Basic algorithm Cost
Program Lecture 2. Numerical Linear Algebra. Gaussian elimination (2) Gaussian elimination. Decompositions, numerical aspects
 Gaussian elimination. Decompositions, numerical aspects") Numerical Linear Algebra Decompositions, numerical aspects Program Lecture 2 LU-decomposition Basic algorithm Cost Stability Pivoting Cholesky decomposition Sparse matrices and reorderings Gerard Sleijpen
Numerical Linear Algebra Decompositions, numerical aspects Program Lecture 2 LU-decomposition Basic algorithm Cost Stability Pivoting Cholesky decomposition Sparse matrices and reorderings Gerard Sleijpen
Numerical Methods I: Numerical linear algebra
 1/3 Numerical Methods I: Numerical linear algebra Georg Stadler Courant Institute, NYU stadler@cimsnyuedu September 1, 017 /3 We study the solution of linear systems of the form Ax = b with A R n n, x,
1/3 Numerical Methods I: Numerical linear algebra Georg Stadler Courant Institute, NYU stadler@cimsnyuedu September 1, 017 /3 We study the solution of linear systems of the form Ax = b with A R n n, x,
Parallel Numerical Algorithms
 Parallel Numerical Algorithms Chapter 6 Matrix Models Section 6.2 Low Rank Approximation Edgar Solomonik Department of Computer Science University of Illinois at Urbana-Champaign CS 554 / CSE 512 Edgar
Parallel Numerical Algorithms Chapter 6 Matrix Models Section 6.2 Low Rank Approximation Edgar Solomonik Department of Computer Science University of Illinois at Urbana-Champaign CS 554 / CSE 512 Edgar
Solving Boundary Value Problems (with Gaussians)
") What is a boundary value problem? Solving Boundary Value Problems (with Gaussians) Definition A differential equation with constraints on the boundary Michael McCourt Division Argonne National Laboratory
What is a boundary value problem? Solving Boundary Value Problems (with Gaussians) Definition A differential equation with constraints on the boundary Michael McCourt Division Argonne National Laboratory
Poisson Solvers. William McLean. April 21, Return to Math3301/Math5315 Common Material.
 Poisson Solvers William McLean April 21, 2004 Return to Math3301/Math5315 Common Material 1 Introduction Many problems in applied mathematics lead to a partial differential equation of the form a 2 u +
Poisson Solvers William McLean April 21, 2004 Return to Math3301/Math5315 Common Material 1 Introduction Many problems in applied mathematics lead to a partial differential equation of the form a 2 u +
Course Notes: Week 1
 Course Notes: Week 1 Math 270C: Applied Numerical Linear Algebra 1 Lecture 1: Introduction (3/28/11) We will focus on iterative methods for solving linear systems of equations (and some discussion of eigenvalues
Course Notes: Week 1 Math 270C: Applied Numerical Linear Algebra 1 Lecture 1: Introduction (3/28/11) We will focus on iterative methods for solving linear systems of equations (and some discussion of eigenvalues
COMPARED to other computational electromagnetic
 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 58, NO. 12, DECEMBER 2010 3697 Existence of -Matrix Representations of the Inverse Finite-Element Matrix of Electrodynamic Problems and -Based
IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 58, NO. 12, DECEMBER 2010 3697 Existence of -Matrix Representations of the Inverse Finite-Element Matrix of Electrodynamic Problems and -Based
Multigrid finite element methods on semi-structured triangular grids
 XXI Congreso de Ecuaciones Diferenciales y Aplicaciones XI Congreso de Matemática Aplicada Ciudad Real, -5 septiembre 009 (pp. 8) Multigrid finite element methods on semi-structured triangular grids F.J.
XXI Congreso de Ecuaciones Diferenciales y Aplicaciones XI Congreso de Matemática Aplicada Ciudad Real, -5 septiembre 009 (pp. 8) Multigrid finite element methods on semi-structured triangular grids F.J.
Linear System of Equations
 Linear System of Equations Linear systems are perhaps the most widely applied numerical procedures when real-world situation are to be simulated. Example: computing the forces in a TRUSS. F F 5. 77F F.
Linear System of Equations Linear systems are perhaps the most widely applied numerical procedures when real-world situation are to be simulated. Example: computing the forces in a TRUSS. F F 5. 77F F.
A robust inner-outer HSS preconditioner
 NUMERICAL LINEAR ALGEBRA WIH APPLICAIONS Numer. Linear Algebra Appl. 2011; 00:1 0 [Version: 2002/09/18 v1.02] A robust inner-outer HSS preconditioner Jianlin Xia 1 1 Department of Mathematics, Purdue University,
NUMERICAL LINEAR ALGEBRA WIH APPLICAIONS Numer. Linear Algebra Appl. 2011; 00:1 0 [Version: 2002/09/18 v1.02] A robust inner-outer HSS preconditioner Jianlin Xia 1 1 Department of Mathematics, Purdue University,
Application of matrix square root and its inverse to downward wavefield extrapolation
 Application of matrix square root and its inverse to downward wavefield extrapolation Polina Zheglova and Felix J. Herrmann Department of Earth and Ocean sciences, University of British Columbia, Vancouver,
Application of matrix square root and its inverse to downward wavefield extrapolation Polina Zheglova and Felix J. Herrmann Department of Earth and Ocean sciences, University of British Columbia, Vancouver,
A fast randomized algorithm for approximating an SVD of a matrix
 A fast randomized algorithm for approximating an SVD of a matrix Joint work with Franco Woolfe, Edo Liberty, and Vladimir Rokhlin Mark Tygert Program in Applied Mathematics Yale University Place July 17,
A fast randomized algorithm for approximating an SVD of a matrix Joint work with Franco Woolfe, Edo Liberty, and Vladimir Rokhlin Mark Tygert Program in Applied Mathematics Yale University Place July 17,
CLASSICAL ITERATIVE METHODS
 CLASSICAL ITERATIVE METHODS LONG CHEN In this notes we discuss classic iterative methods on solving the linear operator equation (1) Au = f, posed on a finite dimensional Hilbert space V = R N equipped
CLASSICAL ITERATIVE METHODS LONG CHEN In this notes we discuss classic iterative methods on solving the linear operator equation (1) Au = f, posed on a finite dimensional Hilbert space V = R N equipped
Contents. Preface... xi. Introduction...
 Contents Preface... xi Introduction... xv Chapter 1. Computer Architectures... 1 1.1. Different types of parallelism... 1 1.1.1. Overlap, concurrency and parallelism... 1 1.1.2. Temporal and spatial parallelism
Contents Preface... xi Introduction... xv Chapter 1. Computer Architectures... 1 1.1. Different types of parallelism... 1 1.1.1. Overlap, concurrency and parallelism... 1 1.1.2. Temporal and spatial parallelism
SPARSE SOLVERS POISSON EQUATION. Margreet Nool. November 9, 2015 FOR THE. CWI, Multiscale Dynamics
 SPARSE SOLVERS FOR THE POISSON EQUATION Margreet Nool CWI, Multiscale Dynamics November 9, 2015 OUTLINE OF THIS TALK 1 FISHPACK, LAPACK, PARDISO 2 SYSTEM OVERVIEW OF CARTESIUS 3 POISSON EQUATION 4 SOLVERS
SPARSE SOLVERS FOR THE POISSON EQUATION Margreet Nool CWI, Multiscale Dynamics November 9, 2015 OUTLINE OF THIS TALK 1 FISHPACK, LAPACK, PARDISO 2 SYSTEM OVERVIEW OF CARTESIUS 3 POISSON EQUATION 4 SOLVERS
Stabilization and Acceleration of Algebraic Multigrid Method
 Stabilization and Acceleration of Algebraic Multigrid Method Recursive Projection Algorithm A. Jemcov J.P. Maruszewski Fluent Inc. October 24, 2006 Outline 1 Need for Algorithm Stabilization and Acceleration
Stabilization and Acceleration of Algebraic Multigrid Method Recursive Projection Algorithm A. Jemcov J.P. Maruszewski Fluent Inc. October 24, 2006 Outline 1 Need for Algorithm Stabilization and Acceleration
Fast Multipole Methods: Fundamentals & Applications. Ramani Duraiswami Nail A. Gumerov
 Fast Multipole Methods: Fundamentals & Applications Ramani Duraiswami Nail A. Gumerov Week 1. Introduction. What are multipole methods and what is this course about. Problems from physics, mathematics,
Fast Multipole Methods: Fundamentals & Applications Ramani Duraiswami Nail A. Gumerov Week 1. Introduction. What are multipole methods and what is this course about. Problems from physics, mathematics,
ON INTERPOLATION AND INTEGRATION IN FINITE-DIMENSIONAL SPACES OF BOUNDED FUNCTIONS
 COMM. APP. MATH. AND COMP. SCI. Vol., No., ON INTERPOLATION AND INTEGRATION IN FINITE-DIMENSIONAL SPACES OF BOUNDED FUNCTIONS PER-GUNNAR MARTINSSON, VLADIMIR ROKHLIN AND MARK TYGERT We observe that, under
COMM. APP. MATH. AND COMP. SCI. Vol., No., ON INTERPOLATION AND INTEGRATION IN FINITE-DIMENSIONAL SPACES OF BOUNDED FUNCTIONS PER-GUNNAR MARTINSSON, VLADIMIR ROKHLIN AND MARK TYGERT We observe that, under
Preconditioning Techniques for Large Linear Systems Part III: General-Purpose Algebraic Preconditioners
 Preconditioning Techniques for Large Linear Systems Part III: General-Purpose Algebraic Preconditioners Michele Benzi Department of Mathematics and Computer Science Emory University Atlanta, Georgia, USA
Preconditioning Techniques for Large Linear Systems Part III: General-Purpose Algebraic Preconditioners Michele Benzi Department of Mathematics and Computer Science Emory University Atlanta, Georgia, USA