EE 602 TERM PAPER PRESENTATION Richa Tripathi Mounika Boppudi FOURIER SERIES BASED MODEL FOR STATISTICAL SIGNAL PROCESSING - CHONG YUNG CHI
|
|
|
- Archibald Maxwell
- 5 years ago
- Views:
Transcription
1 EE 602 TERM PAPER PRESENTATION Richa Tripathi Mounika Boppudi FOURIER SERIES BASED MODEL FOR STATISTICAL SIGNAL PROCESSING - CHONG YUNG CHI
2 ABSTRACT The goal of the paper is to present a parametric Fourier Series Based Model (FSBM) as an approximation of an unknown LTI system. Based on that FSBM, a minimum phase LPE filter for amplitude estimation of the LTI system together with CR bounds is presented. Then, two algorithms for finding the optimum LPE with finite Gaussian data are presented.
3 PRESENTATION OVERVIEW Introduction Algorithms to estimate amplitude and phase based on different decompositions of LTI system Comparison of results with conventional ARMA Models Conclusions queries
4 INTRODUCTION Assume an LTI system h(n), driven by a random unknown signal u(n), then The system function H(z) is often modeled as a parametric rational function(arma(p,q)) Also, it can be written as min max decomposition where
5 Need of FSBM? To simplify the estimation problem? To find stability easily Since as in rational models we need to find poles and zeroes to find magnitude and phase of LTI system,it is difficult especially for systems with larger order but here we don t need to find poles and zeroes we just have to find alpha and beta parameters. In the stabilty point of view also this problem arises.

 defined as This FSBM can be")

6 REPRESENTATION OF FSBM Assume h(n) is a real LTI system with frequency response as H(w) = H*(-w) defined as This FSBM can be decomposed into two ways MG PS form: where i, are real and p 1 and q 1 and integers
7 MP AP form: where

8 LPE FILTER A conventional p-th order LPE (causal FIR) filter looks like and processes x(n) in a way so that the prediction error is has minimum variance or average power. An optimum LPE filter in this case can be solved from the orthogonality principle
9 By estimation theory, for any unbiased estimates and with given finite data, we can get the CR bounds for the covariance matrix where is the autocorrelation matrix, when x(n) is AR(p) Gaussian and pdf of x(n) is as follows: where


10 FSBM FOR LPE Filter Let the pth order LPE filter ( causal minimum phase IIR) be with Then the prediction error is
, e(n) is the prediction error, then for any")
11 Theorem for Optimum LPE filter Given where and H(w) is FSBM(p*,q), e(n) is the prediction error, then for any
12 PROOF OF THE ABOVE THEOREM causal minimum phase filter, It holds only when with from (1)
13 CR bounds For a FSBM(p,q) Gaussian Process, the CR bounds are given by Note that the CR bounds associated with AR parameters depend on correlations of x(n), whereas those associated with i are uniform and independent of correlations of x(n). The CR bound associated with is the same for both FSBM and AR model.
14
15 Algorithm 1 Estimation of H MP (w) from a given finite data set based on the previous theorem. Step 1: Search for the minimum of the objective function and the associated optimum by a gradient-type iterative optimization algorithm (Fletcher Powell) Obtain the estimates
16 Estimation of order p of LPE filter Done by using the Akaike Information Criteria (AIC) The optimum estimate of p is one where AIC(k) is minimum for that p. Assumptions is that N>>p This is the simplified version after using AML approximation This criteria of estimating the order acts for both FIR as well as FSBM filters
17 Estimation of FSBM parameters Assumption: u(n) is non-gaussian with non zero Mth order cumulant (x(n) is also non Guassian) Two algorithms are presented here which estimate the system amplitude using Algorithm 1 and system phase using a phase estimation algorithm that maximizes a single Mth order cumulant of phase equalized (all pass filtered ) data. Since the cumulant is a highly non linear function, we use Fletcher Powell algorithm to find the parameters.
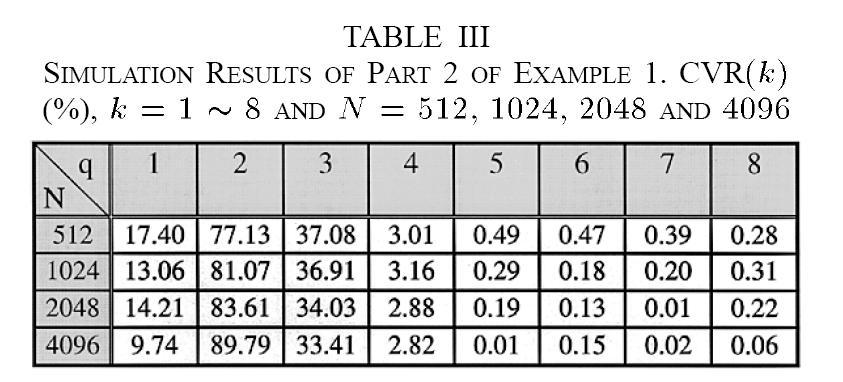
18 Estimating the order q When q is unknown it must be estimated prior to the estimation of parameters. Here, we use an approach based on Cumulant Variation Rate (CVR(k)) defined as where (k) is the maximum of with the kth order all pass FSBM associated Optimum q is one for which CVR(k) is below a certain threshold
19 Now we have estimated the orders p and q. Using that we present two algorithms to estimate the amplitude and phase parameters of the FSBM
20 Algorithm 2 (MG-PS) Step 1: Estimate H MP (w) and 2 from the Algorithm 1 to obtain from which we can obtain estimate of H MG (w) Step 2: Find the optimum all pass FSBM G AP (w) such that is maximum. Then obtain since and
21 Algorithm 3 (MP-AP) Step 1:Estimate H MP (w) and 2 from the Algorithm 1 to obtain and obtain the maximum prediction error Step 2: Find the optimum all pass FSBM G AP (w) using a gradient type iterative algorithm such that M-th order cumulant or y(n) is maximum, and the order of the all pass FSBM g is equal to max(p,q) Then, obtain and since
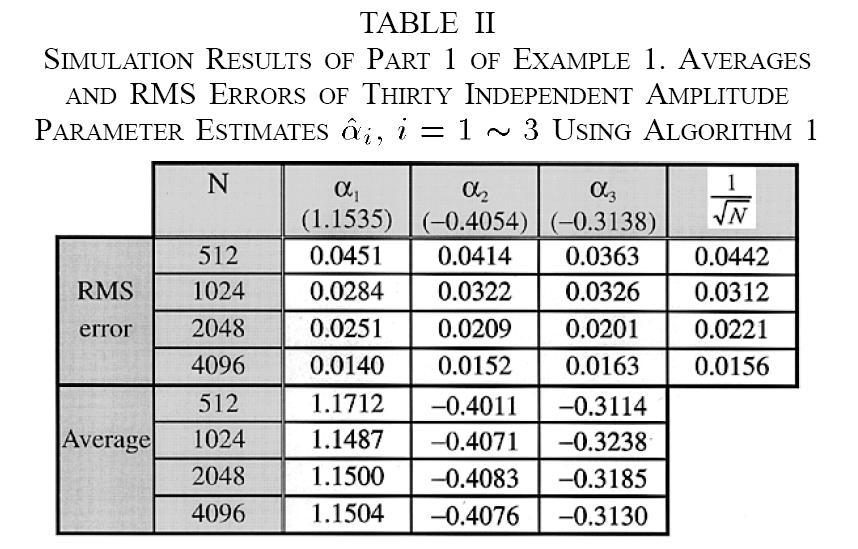
22 Example Simulation results for the CR bounds associated with the amplitude parameters of the FSBM(p,q), estimation of p, and the performance evaluation of Algo 1. The driving input u(n) is assumed to be a zero mean white Gaussian random sequence and a non minimum phase FSBM(3,4) given by
")
23 RESULTS AIC(k)
24
25
26
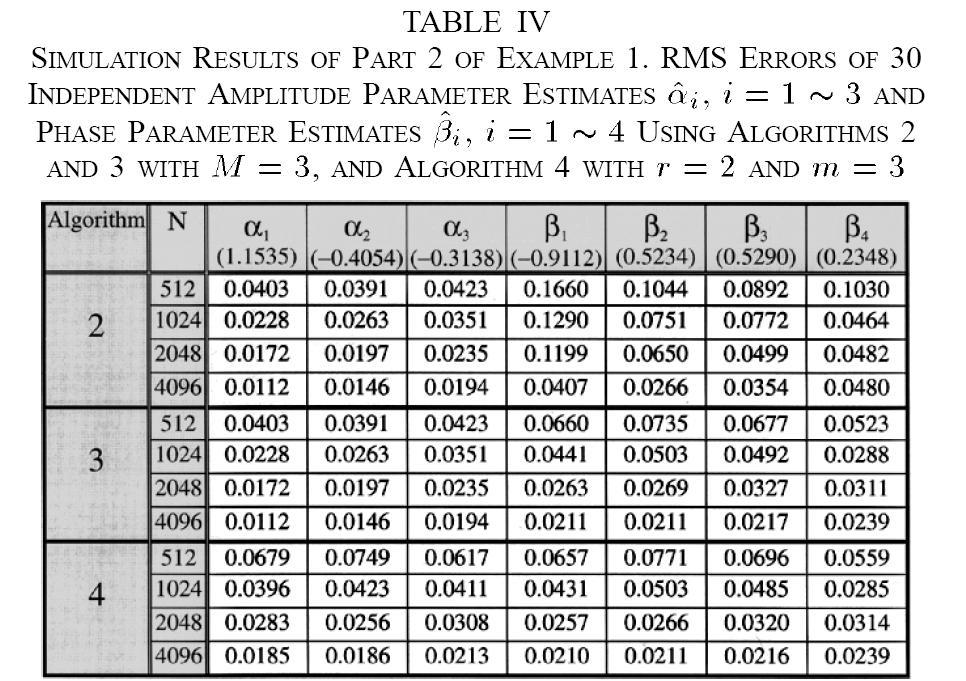
27 AIC(k) data from the simulation results suggest that p=3, so it is good. For amplitude parameters, RMS error is nearly ewual to the square root of CR bounds, which justifies that Algorithm 1 is an AML estimator when the data is Gaussian. Comparing the RMS of the parameters for the two algorithms (2 and 3), we can draw conclusions.
28
29
30 the approximation of FSBM(p,q) to the giventrue ARMA system is never perfect for this case, even when p=q=. This also implies that the FSBM is merely a stable approximation to any arbitrary LTI systems, regardless of pole and zero locations.
31 Conclusions As it turns out from simulations performed, Algorithm 2 and 3 perform nearly the same for amplitude parameter estimation. (since same method is used) For phase estimation, Algorithm 3(MP-AP) performs better than 2 (MG-PS) So, overall, Algorithm 3 is preferred. FSBM is useful for frequency domain implementations such as deconvolution and channel equalization, system identification, speech coding and compression, time delay estimation, signal detection and classification.
32 THANK YOU!!
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EE538 Final Exam Fall 2007 Mon, Dec 10, 8-10 am RHPH 127 Dec. 10, Cover Sheet
 EE538 Final Exam Fall 2007 Mon, Dec 10, 8-10 am RHPH 127 Dec. 10, 2007 Cover Sheet Test Duration: 120 minutes. Open Book but Closed Notes. Calculators allowed!! This test contains five problems. Each of
EE538 Final Exam Fall 2007 Mon, Dec 10, 8-10 am RHPH 127 Dec. 10, 2007 Cover Sheet Test Duration: 120 minutes. Open Book but Closed Notes. Calculators allowed!! This test contains five problems. Each of
2. Typical Discrete-Time Systems All-Pass Systems (5.5) 2.2. Minimum-Phase Systems (5.6) 2.3. Generalized Linear-Phase Systems (5.
 2.2. Minimum-Phase Systems (5.6) 2.3. Generalized Linear-Phase Systems (5.") . Typical Discrete-Time Systems.1. All-Pass Systems (5.5).. Minimum-Phase Systems (5.6).3. Generalized Linear-Phase Systems (5.7) .1. All-Pass Systems An all-pass system is defined as a system which has
. Typical Discrete-Time Systems.1. All-Pass Systems (5.5).. Minimum-Phase Systems (5.6).3. Generalized Linear-Phase Systems (5.7) .1. All-Pass Systems An all-pass system is defined as a system which has
Computer Engineering 4TL4: Digital Signal Processing
 Computer Engineering 4TL4: Digital Signal Processing Day Class Instructor: Dr. I. C. BRUCE Duration of Examination: 3 Hours McMaster University Final Examination December, 2003 This examination paper includes
Computer Engineering 4TL4: Digital Signal Processing Day Class Instructor: Dr. I. C. BRUCE Duration of Examination: 3 Hours McMaster University Final Examination December, 2003 This examination paper includes
( ) John A. Quinn Lecture. ESE 531: Digital Signal Processing. Lecture Outline. Frequency Response of LTI System. Example: Zero on Real Axis
 John A. Quinn Lecture. ESE 531: Digital Signal Processing. Lecture Outline. Frequency Response of LTI System. Example: Zero on Real Axis") John A. Quinn Lecture ESE 531: Digital Signal Processing Lec 15: March 21, 2017 Review, Generalized Linear Phase Systems Penn ESE 531 Spring 2017 Khanna Lecture Outline!!! 2 Frequency Response of LTI System
John A. Quinn Lecture ESE 531: Digital Signal Processing Lec 15: March 21, 2017 Review, Generalized Linear Phase Systems Penn ESE 531 Spring 2017 Khanna Lecture Outline!!! 2 Frequency Response of LTI System
LTI Systems, Additive Noise, and Order Estimation
 LTI Systems, Additive oise, and Order Estimation Soosan Beheshti, Munther A. Dahleh Laboratory for Information and Decision Systems Department of Electrical Engineering and Computer Science Massachusetts
LTI Systems, Additive oise, and Order Estimation Soosan Beheshti, Munther A. Dahleh Laboratory for Information and Decision Systems Department of Electrical Engineering and Computer Science Massachusetts
EE538 Final Exam Fall :20 pm -5:20 pm PHYS 223 Dec. 17, Cover Sheet
 EE538 Final Exam Fall 005 3:0 pm -5:0 pm PHYS 3 Dec. 17, 005 Cover Sheet Test Duration: 10 minutes. Open Book but Closed Notes. Calculators ARE allowed!! This test contains five problems. Each of the five
EE538 Final Exam Fall 005 3:0 pm -5:0 pm PHYS 3 Dec. 17, 005 Cover Sheet Test Duration: 10 minutes. Open Book but Closed Notes. Calculators ARE allowed!! This test contains five problems. Each of the five
DETECTION theory deals primarily with techniques for
 ADVANCED SIGNAL PROCESSING SE Optimum Detection of Deterministic and Random Signals Stefan Tertinek Graz University of Technology turtle@sbox.tugraz.at Abstract This paper introduces various methods for
ADVANCED SIGNAL PROCESSING SE Optimum Detection of Deterministic and Random Signals Stefan Tertinek Graz University of Technology turtle@sbox.tugraz.at Abstract This paper introduces various methods for
Nonparametric and Parametric Defined This text distinguishes between systems and the sequences (processes) that result when a WN input is applied
 that result when a WN input is applied") Linear Signal Models Overview Introduction Linear nonparametric vs. parametric models Equivalent representations Spectral flatness measure PZ vs. ARMA models Wold decomposition Introduction Many researchers
Linear Signal Models Overview Introduction Linear nonparametric vs. parametric models Equivalent representations Spectral flatness measure PZ vs. ARMA models Wold decomposition Introduction Many researchers
Advanced Digital Signal Processing -Introduction
 Advanced Digital Signal Processing -Introduction LECTURE-2 1 AP9211- ADVANCED DIGITAL SIGNAL PROCESSING UNIT I DISCRETE RANDOM SIGNAL PROCESSING Discrete Random Processes- Ensemble Averages, Stationary
Advanced Digital Signal Processing -Introduction LECTURE-2 1 AP9211- ADVANCED DIGITAL SIGNAL PROCESSING UNIT I DISCRETE RANDOM SIGNAL PROCESSING Discrete Random Processes- Ensemble Averages, Stationary
Stability Condition in Terms of the Pole Locations
 Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Lecture 19 IIR Filters
 Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Z Transform (Part - II)
") Z Transform (Part - II). The Z Transform of the following real exponential sequence x(nt) = a n, nt 0 = 0, nt < 0, a > 0 (a) ; z > (c) for all z z (b) ; z (d) ; z < a > a az az Soln. The given sequence
Z Transform (Part - II). The Z Transform of the following real exponential sequence x(nt) = a n, nt 0 = 0, nt < 0, a > 0 (a) ; z > (c) for all z z (b) ; z (d) ; z < a > a az az Soln. The given sequence
Part III Spectrum Estimation
 ECE79-4 Part III Part III Spectrum Estimation 3. Parametric Methods for Spectral Estimation Electrical & Computer Engineering North Carolina State University Acnowledgment: ECE79-4 slides were adapted
ECE79-4 Part III Part III Spectrum Estimation 3. Parametric Methods for Spectral Estimation Electrical & Computer Engineering North Carolina State University Acnowledgment: ECE79-4 slides were adapted
EE 123: Digital Signal Processing Spring Lecture 23 April 10
 EE 123: Digital Signal Processing Spring 2007 Lecture 23 April 10 Lecturer: Anant Sahai Scribe: Chuo J. Liu 23.1 Outline In this lecture, we talked about implementation issue for rational transfer function.
EE 123: Digital Signal Processing Spring 2007 Lecture 23 April 10 Lecturer: Anant Sahai Scribe: Chuo J. Liu 23.1 Outline In this lecture, we talked about implementation issue for rational transfer function.
Adaptive Systems Homework Assignment 1
 Signal Processing and Speech Communication Lab. Graz University of Technology Adaptive Systems Homework Assignment 1 Name(s) Matr.No(s). The analytical part of your homework (your calculation sheets) as
Signal Processing and Speech Communication Lab. Graz University of Technology Adaptive Systems Homework Assignment 1 Name(s) Matr.No(s). The analytical part of your homework (your calculation sheets) as
Let H(z) = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )
 = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )") Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Basics on 2-D 2 D Random Signal
 Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
SGN Advanced Signal Processing: Lecture 8 Parameter estimation for AR and MA models. Model order selection
 SG 21006 Advanced Signal Processing: Lecture 8 Parameter estimation for AR and MA models. Model order selection Ioan Tabus Department of Signal Processing Tampere University of Technology Finland 1 / 28
SG 21006 Advanced Signal Processing: Lecture 8 Parameter estimation for AR and MA models. Model order selection Ioan Tabus Department of Signal Processing Tampere University of Technology Finland 1 / 28
Discrete-time signals and systems
 Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
DISCRETE-TIME SIGNAL PROCESSING
 THIRD EDITION DISCRETE-TIME SIGNAL PROCESSING ALAN V. OPPENHEIM MASSACHUSETTS INSTITUTE OF TECHNOLOGY RONALD W. SCHÄFER HEWLETT-PACKARD LABORATORIES Upper Saddle River Boston Columbus San Francisco New
THIRD EDITION DISCRETE-TIME SIGNAL PROCESSING ALAN V. OPPENHEIM MASSACHUSETTS INSTITUTE OF TECHNOLOGY RONALD W. SCHÄFER HEWLETT-PACKARD LABORATORIES Upper Saddle River Boston Columbus San Francisco New
Communications and Signal Processing Spring 2017 MSE Exam
 Communications and Signal Processing Spring 2017 MSE Exam Please obtain your Test ID from the following table. You must write your Test ID and name on each of the pages of this exam. A page with missing
Communications and Signal Processing Spring 2017 MSE Exam Please obtain your Test ID from the following table. You must write your Test ID and name on each of the pages of this exam. A page with missing
Digital Signal Processing
 COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A
 DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
Parametric Signal Modeling and Linear Prediction Theory 1. Discrete-time Stochastic Processes (cont d)
") Parametric Signal Modeling and Linear Prediction Theory 1. Discrete-time Stochastic Processes (cont d) Electrical & Computer Engineering North Carolina State University Acknowledgment: ECE792-41 slides
Parametric Signal Modeling and Linear Prediction Theory 1. Discrete-time Stochastic Processes (cont d) Electrical & Computer Engineering North Carolina State University Acknowledgment: ECE792-41 slides
ECE503: Digital Signal Processing Lecture 5
 ECE53: Digital Signal Processing Lecture 5 D. Richard Brown III WPI 3-February-22 WPI D. Richard Brown III 3-February-22 / 32 Lecture 5 Topics. Magnitude and phase characterization of transfer functions
ECE53: Digital Signal Processing Lecture 5 D. Richard Brown III WPI 3-February-22 WPI D. Richard Brown III 3-February-22 / 32 Lecture 5 Topics. Magnitude and phase characterization of transfer functions
6.02 Fall 2012 Lecture #10
 6.02 Fall 2012 Lecture #10 Linear time-invariant (LTI) models Convolution 6.02 Fall 2012 Lecture 10, Slide #1 Modeling Channel Behavior codeword bits in generate x[n] 1001110101 digitized modulate DAC
6.02 Fall 2012 Lecture #10 Linear time-invariant (LTI) models Convolution 6.02 Fall 2012 Lecture 10, Slide #1 Modeling Channel Behavior codeword bits in generate x[n] 1001110101 digitized modulate DAC
Linear Stochastic Models. Special Types of Random Processes: AR, MA, and ARMA. Digital Signal Processing
 Linear Stochastic Models Special Types of Random Processes: AR, MA, and ARMA Digital Signal Processing Department of Electrical and Electronic Engineering, Imperial College d.mandic@imperial.ac.uk c Danilo
Linear Stochastic Models Special Types of Random Processes: AR, MA, and ARMA Digital Signal Processing Department of Electrical and Electronic Engineering, Imperial College d.mandic@imperial.ac.uk c Danilo
EE482: Digital Signal Processing Applications
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 11 Adaptive Filtering 14/03/04 http://www.ee.unlv.edu/~b1morris/ee482/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 11 Adaptive Filtering 14/03/04 http://www.ee.unlv.edu/~b1morris/ee482/
Module 4 : Laplace and Z Transform Problem Set 4
 Module 4 : Laplace and Z Transform Problem Set 4 Problem 1 The input x(t) and output y(t) of a causal LTI system are related to the block diagram representation shown in the figure. (a) Determine a differential
Module 4 : Laplace and Z Transform Problem Set 4 Problem 1 The input x(t) and output y(t) of a causal LTI system are related to the block diagram representation shown in the figure. (a) Determine a differential
! Introduction. ! Discrete Time Signals & Systems. ! Z-Transform. ! Inverse Z-Transform. ! Sampling of Continuous Time Signals
 ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
Analog LTI system Digital LTI system
 Sampling Decimation Seismometer Amplifier AAA filter DAA filter Analog LTI system Digital LTI system Filtering (Digital Systems) input output filter xn [ ] X ~ [ k] Convolution of Sequences hn [ ] yn [
Sampling Decimation Seismometer Amplifier AAA filter DAA filter Analog LTI system Digital LTI system Filtering (Digital Systems) input output filter xn [ ] X ~ [ k] Convolution of Sequences hn [ ] yn [
Digital Signal Processing Module 1 Analysis of Discrete time Linear Time - Invariant Systems
 Digital Signal Processing Module 1 Analysis of Discrete time Linear Time - Invariant Systems Objective: 1. To understand the representation of Discrete time signals 2. To analyze the causality and stability
Digital Signal Processing Module 1 Analysis of Discrete time Linear Time - Invariant Systems Objective: 1. To understand the representation of Discrete time signals 2. To analyze the causality and stability
EE 3054: Signals, Systems, and Transforms Spring A causal discrete-time LTI system is described by the equation. y(n) = 1 4.
 = 1 4.") EE : Signals, Systems, and Transforms Spring 7. A causal discrete-time LTI system is described by the equation Test y(n) = X x(n k) k= No notes, closed book. Show your work. Simplify your answers.. A discrete-time
EE : Signals, Systems, and Transforms Spring 7. A causal discrete-time LTI system is described by the equation Test y(n) = X x(n k) k= No notes, closed book. Show your work. Simplify your answers.. A discrete-time
Statistical and Adaptive Signal Processing
 r Statistical and Adaptive Signal Processing Spectral Estimation, Signal Modeling, Adaptive Filtering and Array Processing Dimitris G. Manolakis Massachusetts Institute of Technology Lincoln Laboratory
r Statistical and Adaptive Signal Processing Spectral Estimation, Signal Modeling, Adaptive Filtering and Array Processing Dimitris G. Manolakis Massachusetts Institute of Technology Lincoln Laboratory
Digital Signal Processing Lecture 4
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
A NEW INFORMATION THEORETIC APPROACH TO ORDER ESTIMATION PROBLEM. Massachusetts Institute of Technology, Cambridge, MA 02139, U.S.A.
 A EW IFORMATIO THEORETIC APPROACH TO ORDER ESTIMATIO PROBLEM Soosan Beheshti Munther A. Dahleh Massachusetts Institute of Technology, Cambridge, MA 0239, U.S.A. Abstract: We introduce a new method of model
A EW IFORMATIO THEORETIC APPROACH TO ORDER ESTIMATIO PROBLEM Soosan Beheshti Munther A. Dahleh Massachusetts Institute of Technology, Cambridge, MA 0239, U.S.A. Abstract: We introduce a new method of model
Lecture 18: Stability
 Lecture 18: Stability ECE 401: Signal and Image Analysis University of Illinois 4/18/2017 1 Stability 2 Impulse Response 3 Z Transform Outline 1 Stability 2 Impulse Response 3 Z Transform BIBO Stability
Lecture 18: Stability ECE 401: Signal and Image Analysis University of Illinois 4/18/2017 1 Stability 2 Impulse Response 3 Z Transform Outline 1 Stability 2 Impulse Response 3 Z Transform BIBO Stability
ECE-314 Fall 2012 Review Questions for Midterm Examination II
 ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME
 CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME Shri Mata Vaishno Devi University, (SMVDU), 2013 Page 13 CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME When characterizing or modeling a random variable, estimates
CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME Shri Mata Vaishno Devi University, (SMVDU), 2013 Page 13 CHAPTER 2 RANDOM PROCESSES IN DISCRETE TIME When characterizing or modeling a random variable, estimates
Lecture 8 Finite Impulse Response Filters
 Lecture 8 Finite Impulse Response Filters Outline 8. Finite Impulse Response Filters.......................... 8. oving Average Filter............................... 8.. Phase response...............................
Lecture 8 Finite Impulse Response Filters Outline 8. Finite Impulse Response Filters.......................... 8. oving Average Filter............................... 8.. Phase response...............................
Digital Signal Processing Lecture 9 - Design of Digital Filters - FIR
 Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
Massachusetts Institute of Technology
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.011: Introduction to Communication, Control and Signal Processing QUIZ, April 1, 010 QUESTION BOOKLET Your
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.011: Introduction to Communication, Control and Signal Processing QUIZ, April 1, 010 QUESTION BOOKLET Your
CCNY. BME I5100: Biomedical Signal Processing. Stochastic Processes. Lucas C. Parra Biomedical Engineering Department City College of New York
 BME I5100: Biomedical Signal Processing Stochastic Processes Lucas C. Parra Biomedical Engineering Department CCNY 1 Schedule Week 1: Introduction Linear, stationary, normal - the stuff biology is not
BME I5100: Biomedical Signal Processing Stochastic Processes Lucas C. Parra Biomedical Engineering Department CCNY 1 Schedule Week 1: Introduction Linear, stationary, normal - the stuff biology is not
Probability Space. J. McNames Portland State University ECE 538/638 Stochastic Signals Ver
 Stochastic Signals Overview Definitions Second order statistics Stationarity and ergodicity Random signal variability Power spectral density Linear systems with stationary inputs Random signal memory Correlation
Stochastic Signals Overview Definitions Second order statistics Stationarity and ergodicity Random signal variability Power spectral density Linear systems with stationary inputs Random signal memory Correlation
Chapter 7: IIR Filter Design Techniques
 IUST-EE Chapter 7: IIR Filter Design Techniques Contents Performance Specifications Pole-Zero Placement Method Impulse Invariant Method Bilinear Transformation Classical Analog Filters DSP-Shokouhi Advantages
IUST-EE Chapter 7: IIR Filter Design Techniques Contents Performance Specifications Pole-Zero Placement Method Impulse Invariant Method Bilinear Transformation Classical Analog Filters DSP-Shokouhi Advantages
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE)
") QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
/ (2π) X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by
 X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by") Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Question Paper Code : AEC11T02
 Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Probability Models in Electrical and Computer Engineering Mathematical models as tools in analysis and design Deterministic models Probability models
 Probability Models in Electrical and Computer Engineering Mathematical models as tools in analysis and design Deterministic models Probability models Statistical regularity Properties of relative frequency
Probability Models in Electrical and Computer Engineering Mathematical models as tools in analysis and design Deterministic models Probability models Statistical regularity Properties of relative frequency
Multirate signal processing
 Multirate signal processing Discrete-time systems with different sampling rates at various parts of the system are called multirate systems. The need for such systems arises in many applications, including
Multirate signal processing Discrete-time systems with different sampling rates at various parts of the system are called multirate systems. The need for such systems arises in many applications, including
Introduction to DSP Time Domain Representation of Signals and Systems
 Introduction to DSP Time Domain Representation of Signals and Systems Dr. Waleed Al-Hanafy waleed alhanafy@yahoo.com Faculty of Electronic Engineering, Menoufia Univ., Egypt Digital Signal Processing (ECE407)
Introduction to DSP Time Domain Representation of Signals and Systems Dr. Waleed Al-Hanafy waleed alhanafy@yahoo.com Faculty of Electronic Engineering, Menoufia Univ., Egypt Digital Signal Processing (ECE407)
CEPSTRAL ANALYSIS SYNTHESIS ON THE MEL FREQUENCY SCALE, AND AN ADAPTATIVE ALGORITHM FOR IT.
 CEPSTRAL ANALYSIS SYNTHESIS ON THE EL FREQUENCY SCALE, AND AN ADAPTATIVE ALGORITH FOR IT. Summarized overview of the IEEE-publicated papers Cepstral analysis synthesis on the mel frequency scale by Satochi
CEPSTRAL ANALYSIS SYNTHESIS ON THE EL FREQUENCY SCALE, AND AN ADAPTATIVE ALGORITH FOR IT. Summarized overview of the IEEE-publicated papers Cepstral analysis synthesis on the mel frequency scale by Satochi
E : Lecture 1 Introduction
 E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
Interchange of Filtering and Downsampling/Upsampling
 Interchange of Filtering and Downsampling/Upsampling Downsampling and upsampling are linear systems, but not LTI systems. They cannot be implemented by difference equations, and so we cannot apply z-transform
Interchange of Filtering and Downsampling/Upsampling Downsampling and upsampling are linear systems, but not LTI systems. They cannot be implemented by difference equations, and so we cannot apply z-transform
ENEE630 ADSP RECITATION 5 w/ solution Ver
 ENEE630 ADSP RECITATION 5 w/ solution Ver20209 Consider the structures shown in Fig RI, with input transforms and filter responses as indicated Sketch the quantities Y 0 (e jω ) and Y (e jω ) Figure RI:
ENEE630 ADSP RECITATION 5 w/ solution Ver20209 Consider the structures shown in Fig RI, with input transforms and filter responses as indicated Sketch the quantities Y 0 (e jω ) and Y (e jω ) Figure RI:
Multi-rate Signal Processing 3. The Polyphase Representation
 Multi-rate Signal Processing 3. The Polyphase Representation Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by
Multi-rate Signal Processing 3. The Polyphase Representation Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by
ECE4270 Fundamentals of DSP Lecture 20. Fixed-Point Arithmetic in FIR and IIR Filters (part I) Overview of Lecture. Overflow. FIR Digital Filter
 Overview of Lecture. Overflow. FIR Digital Filter") ECE4270 Fundamentals of DSP Lecture 20 Fixed-Point Arithmetic in FIR and IIR Filters (part I) School of ECE Center for Signal and Information Processing Georgia Institute of Technology Overview of Lecture
ECE4270 Fundamentals of DSP Lecture 20 Fixed-Point Arithmetic in FIR and IIR Filters (part I) School of ECE Center for Signal and Information Processing Georgia Institute of Technology Overview of Lecture
Each problem is worth 25 points, and you may solve the problems in any order.
 EE 120: Signals & Systems Department of Electrical Engineering and Computer Sciences University of California, Berkeley Midterm Exam #2 April 11, 2016, 2:10-4:00pm Instructions: There are four questions
EE 120: Signals & Systems Department of Electrical Engineering and Computer Sciences University of California, Berkeley Midterm Exam #2 April 11, 2016, 2:10-4:00pm Instructions: There are four questions
UNIT-II Z-TRANSFORM. This expression is also called a one sided z-transform. This non causal sequence produces positive powers of z in X (z).
.") Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches
 How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
NAME: 11 December 2013 Digital Signal Processing I Final Exam Fall Cover Sheet
 NAME: December Digital Signal Processing I Final Exam Fall Cover Sheet Test Duration: minutes. Open Book but Closed Notes. Three 8.5 x crib sheets allowed Calculators NOT allowed. This test contains four
NAME: December Digital Signal Processing I Final Exam Fall Cover Sheet Test Duration: minutes. Open Book but Closed Notes. Three 8.5 x crib sheets allowed Calculators NOT allowed. This test contains four
EEM 409. Random Signals. Problem Set-2: (Power Spectral Density, LTI Systems with Random Inputs) Problem 1: Problem 2:
 Problem 1: Problem 2:") EEM 409 Random Signals Problem Set-2: (Power Spectral Density, LTI Systems with Random Inputs) Problem 1: Consider a random process of the form = + Problem 2: X(t) = b cos(2π t + ), where b is a constant,
EEM 409 Random Signals Problem Set-2: (Power Spectral Density, LTI Systems with Random Inputs) Problem 1: Consider a random process of the form = + Problem 2: X(t) = b cos(2π t + ), where b is a constant,
Digital Signal Processing I Final Exam Fall 2008 ECE Dec Cover Sheet
 Digital Signal Processing I Final Exam Fall 8 ECE538 7 Dec.. 8 Cover Sheet Test Duration: minutes. Open Book but Closed Notes. Calculators NOT allowed. This test contains FIVE problems. All work should
Digital Signal Processing I Final Exam Fall 8 ECE538 7 Dec.. 8 Cover Sheet Test Duration: minutes. Open Book but Closed Notes. Calculators NOT allowed. This test contains FIVE problems. All work should
Parametric Method Based PSD Estimation using Gaussian Window
 International Journal of Engineering Trends and Technology (IJETT) Volume 29 Number 1 - November 215 Parametric Method Based PSD Estimation using Gaussian Window Pragati Sheel 1, Dr. Rajesh Mehra 2, Preeti
International Journal of Engineering Trends and Technology (IJETT) Volume 29 Number 1 - November 215 Parametric Method Based PSD Estimation using Gaussian Window Pragati Sheel 1, Dr. Rajesh Mehra 2, Preeti
George Mason University ECE 201: Introduction to Signal Analysis Spring 2017
 Assigned: March 20, 2017 Due Date: Week of April 03, 2017 George Mason University ECE 201: Introduction to Signal Analysis Spring 2017 Laboratory Project #6 Due Date Your lab report must be submitted on
Assigned: March 20, 2017 Due Date: Week of April 03, 2017 George Mason University ECE 201: Introduction to Signal Analysis Spring 2017 Laboratory Project #6 Due Date Your lab report must be submitted on
MULTIRATE DIGITAL SIGNAL PROCESSING
 MULTIRATE DIGITAL SIGNAL PROCESSING Signal processing can be enhanced by changing sampling rate: Up-sampling before D/A conversion in order to relax requirements of analog antialiasing filter. Cf. audio
MULTIRATE DIGITAL SIGNAL PROCESSING Signal processing can be enhanced by changing sampling rate: Up-sampling before D/A conversion in order to relax requirements of analog antialiasing filter. Cf. audio
EE482: Digital Signal Processing Applications
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 11 Adaptive Filtering 14/03/04 http://www.ee.unlv.edu/~b1morris/ee482/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 11 Adaptive Filtering 14/03/04 http://www.ee.unlv.edu/~b1morris/ee482/
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science. Fall Solutions for Problem Set 2
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science Issued: Tuesday, September 5. 6.: Discrete-Time Signal Processing Fall 5 Solutions for Problem Set Problem.
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science Issued: Tuesday, September 5. 6.: Discrete-Time Signal Processing Fall 5 Solutions for Problem Set Problem.
Digital Signal Processing Lecture 3 - Discrete-Time Systems
 Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Parametric Signal Modeling and Linear Prediction Theory 1. Discrete-time Stochastic Processes
 Parametric Signal Modeling and Linear Prediction Theory 1. Discrete-time Stochastic Processes Electrical & Computer Engineering North Carolina State University Acknowledgment: ECE792-41 slides were adapted
Parametric Signal Modeling and Linear Prediction Theory 1. Discrete-time Stochastic Processes Electrical & Computer Engineering North Carolina State University Acknowledgment: ECE792-41 slides were adapted
Cosc 3451 Signals and Systems. What is a system? Systems Terminology and Properties of Systems
 Cosc 3451 Signals and Systems Systems Terminology and Properties of Systems What is a system? an entity that manipulates one or more signals to yield new signals (often to accomplish a function) can be
Cosc 3451 Signals and Systems Systems Terminology and Properties of Systems What is a system? an entity that manipulates one or more signals to yield new signals (often to accomplish a function) can be
EEG- Signal Processing
 Fatemeh Hadaeghi EEG- Signal Processing Lecture Notes for BSP, Chapter 5 Master Program Data Engineering 1 5 Introduction The complex patterns of neural activity, both in presence and absence of external
Fatemeh Hadaeghi EEG- Signal Processing Lecture Notes for BSP, Chapter 5 Master Program Data Engineering 1 5 Introduction The complex patterns of neural activity, both in presence and absence of external
 DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
Chap 2. Discrete-Time Signals and Systems
 Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Adaptive Filter Theory
 0 Adaptive Filter heory Sung Ho Cho Hanyang University Seoul, Korea (Office) +8--0-0390 (Mobile) +8-10-541-5178 dragon@hanyang.ac.kr able of Contents 1 Wiener Filters Gradient Search by Steepest Descent
0 Adaptive Filter heory Sung Ho Cho Hanyang University Seoul, Korea (Office) +8--0-0390 (Mobile) +8-10-541-5178 dragon@hanyang.ac.kr able of Contents 1 Wiener Filters Gradient Search by Steepest Descent
Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform.
 Inversion of the z-transform Focus on rational z-transform of z 1. Apply partial fraction expansion. Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform. Let X(z)
Inversion of the z-transform Focus on rational z-transform of z 1. Apply partial fraction expansion. Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform. Let X(z)
6.435, System Identification
 SET 6 System Identification 6.435 Parametrized model structures One-step predictor Identifiability Munther A. Dahleh 1 Models of LTI Systems A complete model u = input y = output e = noise (with PDF).
SET 6 System Identification 6.435 Parametrized model structures One-step predictor Identifiability Munther A. Dahleh 1 Models of LTI Systems A complete model u = input y = output e = noise (with PDF).
SIDDHARTH GROUP OF INSTITUTIONS:: PUTTUR Siddharth Nagar, Narayanavanam Road QUESTION BANK (DESCRIPTIVE)
") SIDDHARTH GROUP OF INSTITUTIONS:: PUTTUR Siddharth Nagar, Narayanavanam Road 517583 QUESTION BANK (DESCRIPTIVE) Subject with Code : Digital Signal Processing(16EC422) Year & Sem: III-B.Tech & II-Sem Course
SIDDHARTH GROUP OF INSTITUTIONS:: PUTTUR Siddharth Nagar, Narayanavanam Road 517583 QUESTION BANK (DESCRIPTIVE) Subject with Code : Digital Signal Processing(16EC422) Year & Sem: III-B.Tech & II-Sem Course
Lesson 1. Optimal signalbehandling LTH. September Statistical Digital Signal Processing and Modeling, Hayes, M:
 Lesson 1 Optimal Signal Processing Optimal signalbehandling LTH September 2013 Statistical Digital Signal Processing and Modeling, Hayes, M: John Wiley & Sons, 1996. ISBN 0471594318 Nedelko Grbic Mtrl
Lesson 1 Optimal Signal Processing Optimal signalbehandling LTH September 2013 Statistical Digital Signal Processing and Modeling, Hayes, M: John Wiley & Sons, 1996. ISBN 0471594318 Nedelko Grbic Mtrl
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2 Discrete Time Systems Today Last time: Administration Overview Announcement: HW1 will be out today Lab 0 out webcast out Today: Ch. 2 - Discrete-Time Signals and
EE123 Digital Signal Processing Lecture 2 Discrete Time Systems Today Last time: Administration Overview Announcement: HW1 will be out today Lab 0 out webcast out Today: Ch. 2 - Discrete-Time Signals and
Final Exam January 31, Solutions
 Final Exam January 31, 014 Signals & Systems (151-0575-01) Prof. R. D Andrea & P. Reist Solutions Exam Duration: Number of Problems: Total Points: Permitted aids: Important: 150 minutes 7 problems 50 points
Final Exam January 31, 014 Signals & Systems (151-0575-01) Prof. R. D Andrea & P. Reist Solutions Exam Duration: Number of Problems: Total Points: Permitted aids: Important: 150 minutes 7 problems 50 points
Time Series: Theory and Methods
 Peter J. Brockwell Richard A. Davis Time Series: Theory and Methods Second Edition With 124 Illustrations Springer Contents Preface to the Second Edition Preface to the First Edition vn ix CHAPTER 1 Stationary
Peter J. Brockwell Richard A. Davis Time Series: Theory and Methods Second Edition With 124 Illustrations Springer Contents Preface to the Second Edition Preface to the First Edition vn ix CHAPTER 1 Stationary
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
III. Time Domain Analysis of systems
 1 III. Time Domain Analysis of systems Here, we adapt properties of continuous time systems to discrete time systems Section 2.2-2.5, pp 17-39 System Notation y(n) = T[ x(n) ] A. Types of Systems Memoryless
1 III. Time Domain Analysis of systems Here, we adapt properties of continuous time systems to discrete time systems Section 2.2-2.5, pp 17-39 System Notation y(n) = T[ x(n) ] A. Types of Systems Memoryless
Linear Convolution Using FFT
 Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
! z-transform. " Tie up loose ends. " Regions of convergence properties. ! Inverse z-transform. " Inspection. " Partial fraction
 Lecture Outline ESE 53: Digital Signal Processing Lec 6: January 3, 207 Inverse z-transform! z-transform " Tie up loose ends " gions of convergence properties! Inverse z-transform " Inspection " Partial
Lecture Outline ESE 53: Digital Signal Processing Lec 6: January 3, 207 Inverse z-transform! z-transform " Tie up loose ends " gions of convergence properties! Inverse z-transform " Inspection " Partial
Digital Signal Processing. Midterm 1 Solution
 EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
Introduction to Computer Vision. 2D Linear Systems
 Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Lecture 7 Discrete Systems
 Lecture 7 Discrete Systems EE 52: Instrumentation and Measurements Lecture Notes Update on November, 29 Aly El-Osery, Electrical Engineering Dept., New Mexico Tech 7. Contents The z-transform 2 Linear
Lecture 7 Discrete Systems EE 52: Instrumentation and Measurements Lecture Notes Update on November, 29 Aly El-Osery, Electrical Engineering Dept., New Mexico Tech 7. Contents The z-transform 2 Linear
Transform Analysis of Linear Time-Invariant Systems
 Transform Analysis of Linear Time-Invariant Systems Discrete-Time Signal Processing Chia-Ping Chen Department of Computer Science and Engineering National Sun Yat-Sen University Kaohsiung, Taiwan ROC Transform
Transform Analysis of Linear Time-Invariant Systems Discrete-Time Signal Processing Chia-Ping Chen Department of Computer Science and Engineering National Sun Yat-Sen University Kaohsiung, Taiwan ROC Transform
ECE538 Final Exam Fall 2017 Digital Signal Processing I 14 December Cover Sheet
 ECE58 Final Exam Fall 7 Digital Signal Processing I December 7 Cover Sheet Test Duration: hours. Open Book but Closed Notes. Three double-sided 8.5 x crib sheets allowed This test contains five problems.
ECE58 Final Exam Fall 7 Digital Signal Processing I December 7 Cover Sheet Test Duration: hours. Open Book but Closed Notes. Three double-sided 8.5 x crib sheets allowed This test contains five problems.
Wiener Filtering. EE264: Lecture 12
 EE264: Lecture 2 Wiener Filtering In this lecture we will take a different view of filtering. Previously, we have depended on frequency-domain specifications to make some sort of LP/ BP/ HP/ BS filter,
EE264: Lecture 2 Wiener Filtering In this lecture we will take a different view of filtering. Previously, we have depended on frequency-domain specifications to make some sort of LP/ BP/ HP/ BS filter,
Digital Signal Processing Lecture 10 - Discrete Fourier Transform
 Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
HST.582J/6.555J/16.456J
 Blind Source Separation: PCA & ICA HST.582J/6.555J/16.456J Gari D. Clifford gari [at] mit. edu http://www.mit.edu/~gari G. D. Clifford 2005-2009 What is BSS? Assume an observation (signal) is a linear
Blind Source Separation: PCA & ICA HST.582J/6.555J/16.456J Gari D. Clifford gari [at] mit. edu http://www.mit.edu/~gari G. D. Clifford 2005-2009 What is BSS? Assume an observation (signal) is a linear
Discrete-Time David Johns and Ken Martin University of Toronto
 Discrete-Time David Johns and Ken Martin University of Toronto (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) University of Toronto 1 of 40 Overview of Some Signal Spectra x c () t st () x s () t xn
Discrete-Time David Johns and Ken Martin University of Toronto (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) University of Toronto 1 of 40 Overview of Some Signal Spectra x c () t st () x s () t xn
Mel-Generalized Cepstral Representation of Speech A Unified Approach to Speech Spectral Estimation. Keiichi Tokuda
 Mel-Generalized Cepstral Representation of Speech A Unified Approach to Speech Spectral Estimation Keiichi Tokuda Nagoya Institute of Technology Carnegie Mellon University Tamkang University March 13,
Mel-Generalized Cepstral Representation of Speech A Unified Approach to Speech Spectral Estimation Keiichi Tokuda Nagoya Institute of Technology Carnegie Mellon University Tamkang University March 13,
Practical Spectral Estimation
 Digital Signal Processing/F.G. Meyer Lecture 4 Copyright 2015 François G. Meyer. All Rights Reserved. Practical Spectral Estimation 1 Introduction The goal of spectral estimation is to estimate how the
Digital Signal Processing/F.G. Meyer Lecture 4 Copyright 2015 François G. Meyer. All Rights Reserved. Practical Spectral Estimation 1 Introduction The goal of spectral estimation is to estimate how the
Centre for Mathematical Sciences HT 2017 Mathematical Statistics
 Lund University Stationary stochastic processes Centre for Mathematical Sciences HT 2017 Mathematical Statistics Computer exercise 3 in Stationary stochastic processes, HT 17. The purpose of this exercise
Lund University Stationary stochastic processes Centre for Mathematical Sciences HT 2017 Mathematical Statistics Computer exercise 3 in Stationary stochastic processes, HT 17. The purpose of this exercise
Z-Transform. x (n) Sampler
 Sampler") Chapter Two A- Discrete Time Signals: The discrete time signal x(n) is obtained by taking samples of the analog signal xa (t) every Ts seconds as shown in Figure below. Analog signal Discrete time signal
Chapter Two A- Discrete Time Signals: The discrete time signal x(n) is obtained by taking samples of the analog signal xa (t) every Ts seconds as shown in Figure below. Analog signal Discrete time signal