Facial Reduction and Geometry on Conic Programming
|
|
|
- Osborn Stewart
- 5 years ago
- Views:
Transcription
1 Facial Reduction and Geometry on Conic Programming Masakazu Muramatsu UEC Bruno F. Lourenço, and Takashi Tsuchiya Seikei University GRIPS Based on the papers of LMT: 1. A structural geometrical analysis of weakly infeasible SDPs (Journal of Operations Research Society of Japan 2016) 2. Weak infeasibility in second order cone programming (Optimization Letters 2015) 3. Facial Reductions and Partial Polyhedrality (Under Review) 4. (Under preparation) NOTE: This talk is a `Random Walk within these works. 2016/8/13 WAO@Shinagawa
2 Contents 1. Conic Programming (CP) and Duality 2. Feasibility Statuses of CP 3. Facial Reduction Algorithm 4. Distance to Polyhedrality and FRA-Poly 5. Cone Expansion and Feasibility Transition Theorems 6. Nasty Problems and FRA dual D =sup{by : c A T y 2 K } $ P =inf{cx : Ax = b, x 2 K} primal/dual dual/primal
3 1. CP and Duality dual D =sup{by : c A T y 2 K } $ P =inf{cx : Ax = b, x 2 K} A = {c A T y : y 2 R m } A = {x : Ax = b} A \ K : Feasible Region
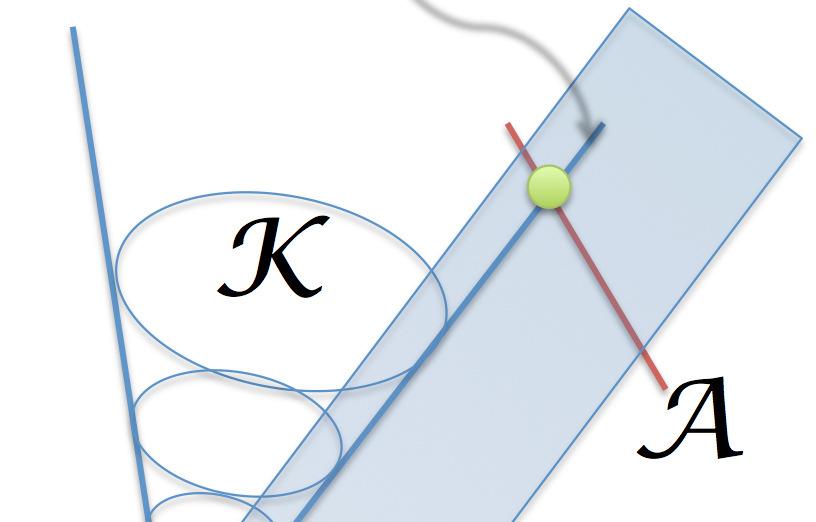
4 Conic Programming K K A A K : Closed Convex Cone A : Affine Subspace CP: Minimizing Linear Fn. over A \ K Example LP, SOCP, SDP,

5 Conic Programming K K A A def x 2 A \ relk, x is an interior feasible point. relative interior
6 Duality Theorem and Nasty Cases Duality Theorem in CP If an interior feasible point exists for Primal 1. Zero Duality Gap 2. Dual has an optimal solution. No interior feasible point 1. Positive Duality Gap 2. Optimal value may not be attained Hard to compute optimal value/solution Both Primal and Dual need interior feasible solutions to ensure existence of optimal solutions in both sides
7 Corruption of Computation r r Waki, Nakata, and M (2012) : Computed optimal values by SeDuMi of SDP relaxations for Polynomial Optimization indexed by relaxation order r =2, 3, 4, r Fact: The Optimal Value is zero for all r. One of the primal or dual does not have interior feasible solutions. Significant Difference
8 2. Feasibility Statuses of CP D =sup{by : c A T y 2 K } $ P =inf{cx : Ax = b, x 2 K} A = {c A T y : y 2 R m } A = {x : Ax = b} A \ K : Feasible Region
9 Four Feasibility Statuses of Conic LP I. K K A A Kmin : minimal cone A \ relk 6= ; A \ K 6= ;, buta \ relk = ; Strongly Feasible Weakly Feasible
10 Four Feasibility Statuses of Conic LP II. "!? See the next slide dist(a, K) > 0 dist(a, K) =0butA \ K = ; Strongly Infeasible Weakly Infeasible Impossible in LP
11 Weakly Infeasible CP K A K! A dist(a, K) =0butA \ K = ; : Weakly Infeasible
12 3.Facial Reduction Algorithm How to obtain a well-behaved problem
")

13 Facial Reduction Algorithm(FRA) 1%2#*+#/34%&45&6&)%7&'(%#)*&+,-+.)/#! K! A! K! A! Reducing Direction!! Weakly feasible instance "#$%#&'(%#)*&+,-+.)/#&-0&! Find w and take intersection of K and A. Repeat this until the `minimal cone is found
14 FRA Details D =sup{by : c A T y 2 K } $ P =inf{cx : Ax = b, x 2 K} FRA applied to D Iterate the following steps 1. Find a reducing direction w 2. Replace K in by K \ {w}? Properties D 1. The iteration number is bounded by the length of the longest chain of faces of K 2. When it stops, then we find either: - strongly feasible instance whose objective value is - strongly infeasible instance, showing is infeasible D D
15 Example: SOCP FRA K n = {(x 0, x) 2 R n : x 0 k xk} w : reducing direction If w 2 relk n, then K n \ {w}? = {0}.
16 Example: SOCP FRA K n = {(x 0, x) 2 R n : x 0 k xk} K n \ {w}? 1-dim cone (half line) w : reducing direction
17 Example: SOCP FRA K n 1 K n 2 K n m 1. One FRA iteration makes at least one SOC to polyhedral 2. At most m iteration is needed to obtain polyhedral cone - Enough to have a good property of duality FRA-Poly
18 4. Distance to Polyhedrality and FRA-Poly K n 1 K n 2 K n m
19 Distance to Polyhedrality Observation: No Nasty LPs even if not strongly feasible If we reach a polyhedral cone, we are happy. ( if needed, just one more FRA is enough to obtain a strongly feasible LP) 1. F 1 F l = K 2. F 1 is polyhedral 3. Others are non-polyhedral 4. Suppose that this chain is the longest one l 1 is called Distance to Polyhedrality
20 Partial Polyhedral Slater s (PPS) Condition K = K 1 K 2 where K 2 is polyhedral. CP satisfies PPS Condition, 9(x 1,x 2 ) 2 A \ K s.t. x 1 2 relk 1 Theorem. If CP satisfies PPS Condition, 1. No duality gap 2. Dual is attained.
21 FRA-Poly SOC PSD We can construct FRA in such a way to reduce non-polyhedral cone (FRA-Poly). Distance-to-polyhedrality is an upper bound of the number of iterations of FRA-Poly. Upper bounds of FRA predicted by the longest chain of Faces Distance to Polyhedrality 2 1 n+1 n DNN n(n+1)/2+1 n
22 5. Cone Expansion and Feasibility Transition Theorems
23 Cone Expansion K cl(k + l(w)) K l(w) Cone Expansion K 7! cl(k + l(w)) w: reducing direction of FRA applied to the dual program l(w) ={ w : 2 R} linear subspace spanned by w
24 Cone Expansion (CE) D =sup{by : c A T y 2 K } $ P =inf{cx : Ax = b, x 2 K} FRA Project the primal cone dual CE Expand the dual cone 0 D =sup{by : c A T y 2 K \ w? } $ 0 P =inf{cx : Ax = b, x 2 cl(k + l(w))} (Specially chosen w corresponds to Luo, Sturm, Zhang; Waki, M)
25 Example: SOCP CE 1. Dual of SOC is SOC (Self Dual) SOC is full-dimensional w : reducing direction If w 2 relk n, then K n + l(w) =R n
26 Example: SOCP CE 2. K n \ {w}? cl(k n + l(w)) is a half space above this hyperplane l(w) w: reducing direction The relation between SOC and w is close to weak infeasibility
27 FRA, CE and Feasibility Primal Problem Dual Problem D P FRA CE 0 D 0 P 1. FRA does not change the feasible region 2. Feasible region of P 0 could be larger than that of D 0 = D, P 0 apple P P FRA D = D 0 = D 1 =...= p D P = P 0 apple P 1 apple...apple p P CE
28 Feasibility Transition by FRA D Strongly Feasible Weakly Feasible Weakly Infeasible Strongly Infeasible FRA 0 D Strongly Feasible Weakly Feasible Weakly Infeasible Strongly Infeasible As long as the problem is in weak status, we can apply FRA. Final status: strongly feasible or infeasible instance
29 Feasibility Transition by CE LTM P Strongly Feasible Weakly Feasible Weakly Infeasible Strongly Infeasible CE 0 P Strongly Feasible Weakly Feasible Weakly Infeasible Strongly Infeasible As long as the problem weakly infeasible, we can apply CE. Final status: Feasible, or strongly infeasible instance.
30 Strongly Feasible but Non-attained problem D =sup{by : c A T y 2 K } $ P =inf{cx : Ax = b, x 2 K} Suppose that D is strongly feasible but not attained. Apply FRA to P to obtain the final problem p P (Equivalently, Apply CE to D to obtain p D) Strongly feasible P = 0 P D = 0 D FRA FRA FRA! P 1!! p P CE! 1 CE CE D!! p D Strongly feasible but not attained Strongly feasible and attained
31 6. Nasty Problems and FRA
32 Computing an approximate optimal solution Aim. Given > 0 find an feasible solution of whose obj. value > D D p D Since is strongly feasible by FTT for CE, 9ŷ, c A T ŷ 2 rel ˆK Let y be an optimal solution of p D the cone of p D It is easy to compute a feasible solution of p D whose obj. value > D using the above. Let ŷ be such a solution.
33 How to compute an approximate optimal solution Let w 1,...,w p be the reducing directions. There exists positive numbers 1,..., p such that px c A T ŷ + i w i 2 K. i=1 Cone Expansion w K 7! cl(k + l(w)) c A T ŷ
34 Properties of Reducing Direction Let w 1,...,w p 2 K be reducing directions of FRA applied to D. (p apple n) If P is weakly infeasible, then (c + span(w 1,...,w p )) \ K is also weakly infeasible. A directions approaching the cone In case of SOCP or SDP, given a positive number, we can explicitly compute a point on A whose distance from the cone is less than
35 Misleading Picture of Weak Infeasibility K A K! A We need p>0 directions to approach K in general. These directions are `reducing directions.
36 Thank you and Happy Birthday, Mizuno Sensei The papers by Lourenço, M. and Tsuchiya: 1. A structural geometrical analysis of weakly infeasible SDPs (Journal of Operations Research Society of Japan 2016) 2. Weak infeasibility in second order cone programming (Optimization Letters 2015) 3. Facial Reductions and Partial Polyhedrality (Under Review) 4. (Under preparation)
37 Example: FRA and CE on SDP w = O O O : reducing direction FRA CE S n + \ {w}? = O O O cl(s n + + l(w)) = NOTE: The resulting problems are again SDP
Facial Reduction and Partial Polyhedrality
 Facial Reduction and Partial Polyhedrality Bruno F. Lourenço Masakazu Muramatsu Takashi Tsuchiya November 05 (Revised: October 06, April 07, April 08) Abstract We present FRA-Poly, a facial reduction algorithm
Facial Reduction and Partial Polyhedrality Bruno F. Lourenço Masakazu Muramatsu Takashi Tsuchiya November 05 (Revised: October 06, April 07, April 08) Abstract We present FRA-Poly, a facial reduction algorithm
A STRUCTURAL GEOMETRICAL ANALYSIS OF WEAKLY INFEASIBLE SDPS
 Journal of the Operations Research Society of Japan Vol. 59, No. 3, July 2016, pp. 241 257 c The Operations Research Society of Japan A STRUCTURAL GEOMETRICAL ANALYSIS OF WEAKLY INFEASIBLE SDPS Bruno F.
Journal of the Operations Research Society of Japan Vol. 59, No. 3, July 2016, pp. 241 257 c The Operations Research Society of Japan A STRUCTURAL GEOMETRICAL ANALYSIS OF WEAKLY INFEASIBLE SDPS Bruno F.
Lecture 5. Theorems of Alternatives and Self-Dual Embedding
 IE 8534 1 Lecture 5. Theorems of Alternatives and Self-Dual Embedding IE 8534 2 A system of linear equations may not have a solution. It is well known that either Ax = c has a solution, or A T y = 0, c
IE 8534 1 Lecture 5. Theorems of Alternatives and Self-Dual Embedding IE 8534 2 A system of linear equations may not have a solution. It is well known that either Ax = c has a solution, or A T y = 0, c
arxiv: v4 [math.oc] 12 Apr 2017
![arxiv: v4 [math.oc] 12 Apr 2017](/thumbs/94/118455111.jpg "arxiv: v4 [math.oc] 12 Apr 2017") Exact duals and short certificates of infeasibility and weak infeasibility in conic linear programming arxiv:1507.00290v4 [math.oc] 12 Apr 2017 Minghui Liu Gábor Pataki April 14, 2017 Abstract In conic
Exact duals and short certificates of infeasibility and weak infeasibility in conic linear programming arxiv:1507.00290v4 [math.oc] 12 Apr 2017 Minghui Liu Gábor Pataki April 14, 2017 Abstract In conic
Lecture 5. The Dual Cone and Dual Problem
 IE 8534 1 Lecture 5. The Dual Cone and Dual Problem IE 8534 2 For a convex cone K, its dual cone is defined as K = {y x, y 0, x K}. The inner-product can be replaced by x T y if the coordinates of the
IE 8534 1 Lecture 5. The Dual Cone and Dual Problem IE 8534 2 For a convex cone K, its dual cone is defined as K = {y x, y 0, x K}. The inner-product can be replaced by x T y if the coordinates of the
Approximate Farkas Lemmas in Convex Optimization
 Approximate Farkas Lemmas in Convex Optimization Imre McMaster University Advanced Optimization Lab AdvOL Graduate Student Seminar October 25, 2004 1 Exact Farkas Lemma Motivation 2 3 Future plans The
Approximate Farkas Lemmas in Convex Optimization Imre McMaster University Advanced Optimization Lab AdvOL Graduate Student Seminar October 25, 2004 1 Exact Farkas Lemma Motivation 2 3 Future plans The
Semidefinite Programming
 Semidefinite Programming Basics and SOS Fernando Mário de Oliveira Filho Campos do Jordão, 2 November 23 Available at: www.ime.usp.br/~fmario under talks Conic programming V is a real vector space h, i
Semidefinite Programming Basics and SOS Fernando Mário de Oliveira Filho Campos do Jordão, 2 November 23 Available at: www.ime.usp.br/~fmario under talks Conic programming V is a real vector space h, i
arxiv: v2 [math.oc] 16 Nov 2015
![arxiv: v2 [math.oc] 16 Nov 2015](/thumbs/90/102230967.jpg "arxiv: v2 [math.oc] 16 Nov 2015") Solving SDP Completely with an Interior Point Oracle Bruno F. Lourenço Masakazu Muramatsu Takashi Tsuchiya arxiv:1507.08065v2 [math.oc] 16 Nov 2015 July 2015 (Revised: November 2015) Abstract We suppose
Solving SDP Completely with an Interior Point Oracle Bruno F. Lourenço Masakazu Muramatsu Takashi Tsuchiya arxiv:1507.08065v2 [math.oc] 16 Nov 2015 July 2015 (Revised: November 2015) Abstract We suppose
ELEMENTARY REFORMULATION AND SUCCINCT CERTIFICATES IN CONIC LINEAR PROGRAMMING. Minghui Liu
 ELEMENTARY REFORMULATION AND SUCCINCT CERTIFICATES IN CONIC LINEAR PROGRAMMING Minghui Liu A dissertation submitted to the faculty of the University of North Carolina at Chapel Hill in partial fulfillment
ELEMENTARY REFORMULATION AND SUCCINCT CERTIFICATES IN CONIC LINEAR PROGRAMMING Minghui Liu A dissertation submitted to the faculty of the University of North Carolina at Chapel Hill in partial fulfillment
I.3. LMI DUALITY. Didier HENRION EECI Graduate School on Control Supélec - Spring 2010
 I.3. LMI DUALITY Didier HENRION henrion@laas.fr EECI Graduate School on Control Supélec - Spring 2010 Primal and dual For primal problem p = inf x g 0 (x) s.t. g i (x) 0 define Lagrangian L(x, z) = g 0
I.3. LMI DUALITY Didier HENRION henrion@laas.fr EECI Graduate School on Control Supélec - Spring 2010 Primal and dual For primal problem p = inf x g 0 (x) s.t. g i (x) 0 define Lagrangian L(x, z) = g 0
Research overview. Seminar September 4, Lehigh University Department of Industrial & Systems Engineering. Research overview.
 Research overview Lehigh University Department of Industrial & Systems Engineering COR@L Seminar September 4, 2008 1 Duality without regularity condition Duality in non-exact arithmetic 2 interior point
Research overview Lehigh University Department of Industrial & Systems Engineering COR@L Seminar September 4, 2008 1 Duality without regularity condition Duality in non-exact arithmetic 2 interior point
Lecture 8. Strong Duality Results. September 22, 2008
 Strong Duality Results September 22, 2008 Outline Lecture 8 Slater Condition and its Variations Convex Objective with Linear Inequality Constraints Quadratic Objective over Quadratic Constraints Representation
Strong Duality Results September 22, 2008 Outline Lecture 8 Slater Condition and its Variations Convex Objective with Linear Inequality Constraints Quadratic Objective over Quadratic Constraints Representation
12. Interior-point methods
 12. Interior-point methods Convex Optimization Boyd & Vandenberghe inequality constrained minimization logarithmic barrier function and central path barrier method feasibility and phase I methods complexity
12. Interior-point methods Convex Optimization Boyd & Vandenberghe inequality constrained minimization logarithmic barrier function and central path barrier method feasibility and phase I methods complexity
Dimension reduction for semidefinite programming
 1 / 22 Dimension reduction for semidefinite programming Pablo A. Parrilo Laboratory for Information and Decision Systems Electrical Engineering and Computer Science Massachusetts Institute of Technology
1 / 22 Dimension reduction for semidefinite programming Pablo A. Parrilo Laboratory for Information and Decision Systems Electrical Engineering and Computer Science Massachusetts Institute of Technology
The Graph Realization Problem
 The Graph Realization Problem via Semi-Definite Programming A. Y. Alfakih alfakih@uwindsor.ca Mathematics and Statistics University of Windsor The Graph Realization Problem p.1/21 The Graph Realization
The Graph Realization Problem via Semi-Definite Programming A. Y. Alfakih alfakih@uwindsor.ca Mathematics and Statistics University of Windsor The Graph Realization Problem p.1/21 The Graph Realization
Summer School: Semidefinite Optimization
 Summer School: Semidefinite Optimization Christine Bachoc Université Bordeaux I, IMB Research Training Group Experimental and Constructive Algebra Haus Karrenberg, Sept. 3 - Sept. 7, 2012 Duality Theory
Summer School: Semidefinite Optimization Christine Bachoc Université Bordeaux I, IMB Research Training Group Experimental and Constructive Algebra Haus Karrenberg, Sept. 3 - Sept. 7, 2012 Duality Theory
How to generate weakly infeasible semidefinite programs via Lasserre s relaxations for polynomial optimization
 CS-11-01 How to generate weakly infeasible semidefinite programs via Lasserre s relaxations for polynomial optimization Hayato Waki Department of Computer Science, The University of Electro-Communications
CS-11-01 How to generate weakly infeasible semidefinite programs via Lasserre s relaxations for polynomial optimization Hayato Waki Department of Computer Science, The University of Electro-Communications
Lecture: Introduction to LP, SDP and SOCP
 Lecture: Introduction to LP, SDP and SOCP Zaiwen Wen Beijing International Center For Mathematical Research Peking University http://bicmr.pku.edu.cn/~wenzw/bigdata2015.html wenzw@pku.edu.cn Acknowledgement:
Lecture: Introduction to LP, SDP and SOCP Zaiwen Wen Beijing International Center For Mathematical Research Peking University http://bicmr.pku.edu.cn/~wenzw/bigdata2015.html wenzw@pku.edu.cn Acknowledgement:
Convex Optimization M2
 Convex Optimization M2 Lecture 3 A. d Aspremont. Convex Optimization M2. 1/49 Duality A. d Aspremont. Convex Optimization M2. 2/49 DMs DM par email: dm.daspremont@gmail.com A. d Aspremont. Convex Optimization
Convex Optimization M2 Lecture 3 A. d Aspremont. Convex Optimization M2. 1/49 Duality A. d Aspremont. Convex Optimization M2. 2/49 DMs DM par email: dm.daspremont@gmail.com A. d Aspremont. Convex Optimization
Numerical Optimization
 Linear Programming - Interior Point Methods Computer Science and Automation Indian Institute of Science Bangalore 560 012, India. NPTEL Course on Example 1 Computational Complexity of Simplex Algorithm
Linear Programming - Interior Point Methods Computer Science and Automation Indian Institute of Science Bangalore 560 012, India. NPTEL Course on Example 1 Computational Complexity of Simplex Algorithm
Lagrangian Duality Theory
 Lagrangian Duality Theory Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A. http://www.stanford.edu/ yyye Chapter 14.1-4 1 Recall Primal and Dual
Lagrangian Duality Theory Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A. http://www.stanford.edu/ yyye Chapter 14.1-4 1 Recall Primal and Dual
POLYNOMIAL OPTIMIZATION WITH SUMS-OF-SQUARES INTERPOLANTS
 POLYNOMIAL OPTIMIZATION WITH SUMS-OF-SQUARES INTERPOLANTS Sercan Yıldız syildiz@samsi.info in collaboration with Dávid Papp (NCSU) OPT Transition Workshop May 02, 2017 OUTLINE Polynomial optimization and
POLYNOMIAL OPTIMIZATION WITH SUMS-OF-SQUARES INTERPOLANTS Sercan Yıldız syildiz@samsi.info in collaboration with Dávid Papp (NCSU) OPT Transition Workshop May 02, 2017 OUTLINE Polynomial optimization and
4. Algebra and Duality
 4-1 Algebra and Duality P. Parrilo and S. Lall, CDC 2003 2003.12.07.01 4. Algebra and Duality Example: non-convex polynomial optimization Weak duality and duality gap The dual is not intrinsic The cone
4-1 Algebra and Duality P. Parrilo and S. Lall, CDC 2003 2003.12.07.01 4. Algebra and Duality Example: non-convex polynomial optimization Weak duality and duality gap The dual is not intrinsic The cone
A Simple Derivation of a Facial Reduction Algorithm and Extended Dual Systems
 A Simple Derivation of a Facial Reduction Algorithm and Extended Dual Systems Gábor Pataki gabor@unc.edu Dept. of Statistics and OR University of North Carolina at Chapel Hill Abstract The Facial Reduction
A Simple Derivation of a Facial Reduction Algorithm and Extended Dual Systems Gábor Pataki gabor@unc.edu Dept. of Statistics and OR University of North Carolina at Chapel Hill Abstract The Facial Reduction
Supplement: Hoffman s Error Bounds
 IE 8534 1 Supplement: Hoffman s Error Bounds IE 8534 2 In Lecture 1 we learned that linear program and its dual problem (P ) min c T x s.t. (D) max b T y s.t. Ax = b x 0, A T y + s = c s 0 under the Slater
IE 8534 1 Supplement: Hoffman s Error Bounds IE 8534 2 In Lecture 1 we learned that linear program and its dual problem (P ) min c T x s.t. (D) max b T y s.t. Ax = b x 0, A T y + s = c s 0 under the Slater
SEMIDEFINITE PROGRAM BASICS. Contents
 SEMIDEFINITE PROGRAM BASICS BRIAN AXELROD Abstract. A introduction to the basics of Semidefinite programs. Contents 1. Definitions and Preliminaries 1 1.1. Linear Algebra 1 1.2. Convex Analysis (on R n
SEMIDEFINITE PROGRAM BASICS BRIAN AXELROD Abstract. A introduction to the basics of Semidefinite programs. Contents 1. Definitions and Preliminaries 1 1.1. Linear Algebra 1 1.2. Convex Analysis (on R n
Lecture 17: Primal-dual interior-point methods part II
 10-725/36-725: Convex Optimization Spring 2015 Lecture 17: Primal-dual interior-point methods part II Lecturer: Javier Pena Scribes: Pinchao Zhang, Wei Ma Note: LaTeX template courtesy of UC Berkeley EECS
10-725/36-725: Convex Optimization Spring 2015 Lecture 17: Primal-dual interior-point methods part II Lecturer: Javier Pena Scribes: Pinchao Zhang, Wei Ma Note: LaTeX template courtesy of UC Berkeley EECS
A New Use of Douglas-Rachford Splitting and ADMM for Classifying Infeasible, Unbounded, and Pathological Conic Programs
 A New Use of Douglas-Rachford Splitting and ADMM for Classifying Infeasible, Unbounded, and Pathological Conic Programs Yanli Liu, Ernest K. Ryu, and Wotao Yin May 23, 2017 Abstract In this paper, we present
A New Use of Douglas-Rachford Splitting and ADMM for Classifying Infeasible, Unbounded, and Pathological Conic Programs Yanli Liu, Ernest K. Ryu, and Wotao Yin May 23, 2017 Abstract In this paper, we present
LP Duality: outline. Duality theory for Linear Programming. alternatives. optimization I Idea: polyhedra
 LP Duality: outline I Motivation and definition of a dual LP I Weak duality I Separating hyperplane theorem and theorems of the alternatives I Strong duality and complementary slackness I Using duality
LP Duality: outline I Motivation and definition of a dual LP I Weak duality I Separating hyperplane theorem and theorems of the alternatives I Strong duality and complementary slackness I Using duality
i.e., into a monomial, using the Arithmetic-Geometric Mean Inequality, the result will be a posynomial approximation!
 Dennis L. Bricker Dept of Mechanical & Industrial Engineering The University of Iowa i.e., 1 1 1 Minimize X X X subject to XX 4 X 1 0.5X 1 Minimize X X X X 1X X s.t. 4 1 1 1 1 4X X 1 1 1 1 0.5X X X 1 1
Dennis L. Bricker Dept of Mechanical & Industrial Engineering The University of Iowa i.e., 1 1 1 Minimize X X X subject to XX 4 X 1 0.5X 1 Minimize X X X X 1X X s.t. 4 1 1 1 1 4X X 1 1 1 1 0.5X X X 1 1
Lecture: Duality.
 Lecture: Duality http://bicmr.pku.edu.cn/~wenzw/opt-2016-fall.html Acknowledgement: this slides is based on Prof. Lieven Vandenberghe s lecture notes Introduction 2/35 Lagrange dual problem weak and strong
Lecture: Duality http://bicmr.pku.edu.cn/~wenzw/opt-2016-fall.html Acknowledgement: this slides is based on Prof. Lieven Vandenberghe s lecture notes Introduction 2/35 Lagrange dual problem weak and strong
Fast ADMM for Sum of Squares Programs Using Partial Orthogonality
 Fast ADMM for Sum of Squares Programs Using Partial Orthogonality Antonis Papachristodoulou Department of Engineering Science University of Oxford www.eng.ox.ac.uk/control/sysos antonis@eng.ox.ac.uk with
Fast ADMM for Sum of Squares Programs Using Partial Orthogonality Antonis Papachristodoulou Department of Engineering Science University of Oxford www.eng.ox.ac.uk/control/sysos antonis@eng.ox.ac.uk with
SPARSE SECOND ORDER CONE PROGRAMMING FORMULATIONS FOR CONVEX OPTIMIZATION PROBLEMS
 Journal of the Operations Research Society of Japan 2008, Vol. 51, No. 3, 241-264 SPARSE SECOND ORDER CONE PROGRAMMING FORMULATIONS FOR CONVEX OPTIMIZATION PROBLEMS Kazuhiro Kobayashi Sunyoung Kim Masakazu
Journal of the Operations Research Society of Japan 2008, Vol. 51, No. 3, 241-264 SPARSE SECOND ORDER CONE PROGRAMMING FORMULATIONS FOR CONVEX OPTIMIZATION PROBLEMS Kazuhiro Kobayashi Sunyoung Kim Masakazu
12. Interior-point methods
 12. Interior-point methods Convex Optimization Boyd & Vandenberghe inequality constrained minimization logarithmic barrier function and central path barrier method feasibility and phase I methods complexity
12. Interior-point methods Convex Optimization Boyd & Vandenberghe inequality constrained minimization logarithmic barrier function and central path barrier method feasibility and phase I methods complexity
Lecture 1. 1 Conic programming. MA 796S: Convex Optimization and Interior Point Methods October 8, Consider the conic program. min.
 MA 796S: Convex Optimization and Interior Point Methods October 8, 2007 Lecture 1 Lecturer: Kartik Sivaramakrishnan Scribe: Kartik Sivaramakrishnan 1 Conic programming Consider the conic program min s.t.
MA 796S: Convex Optimization and Interior Point Methods October 8, 2007 Lecture 1 Lecturer: Kartik Sivaramakrishnan Scribe: Kartik Sivaramakrishnan 1 Conic programming Consider the conic program min s.t.
Midterm Review. Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A.
 Midterm Review Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A. http://www.stanford.edu/ yyye (LY, Chapter 1-4, Appendices) 1 Separating hyperplane
Midterm Review Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A. http://www.stanford.edu/ yyye (LY, Chapter 1-4, Appendices) 1 Separating hyperplane
A New Use of Douglas-Rachford Splitting and ADMM for Identifying Infeasible, Unbounded, and Pathological Conic Programs
 A New Use of Douglas-Rachford Splitting and ADMM for Identifying Infeasible, Unbounded, and Pathological Conic Programs Yanli Liu Ernest K. Ryu Wotao Yin October 14, 2017 Abstract In this paper, we present
A New Use of Douglas-Rachford Splitting and ADMM for Identifying Infeasible, Unbounded, and Pathological Conic Programs Yanli Liu Ernest K. Ryu Wotao Yin October 14, 2017 Abstract In this paper, we present
Lagrange duality. The Lagrangian. We consider an optimization program of the form
 Lagrange duality Another way to arrive at the KKT conditions, and one which gives us some insight on solving constrained optimization problems, is through the Lagrange dual. The dual is a maximization
Lagrange duality Another way to arrive at the KKT conditions, and one which gives us some insight on solving constrained optimization problems, is through the Lagrange dual. The dual is a maximization
Lecture 6: Conic Optimization September 8
 IE 598: Big Data Optimization Fall 2016 Lecture 6: Conic Optimization September 8 Lecturer: Niao He Scriber: Juan Xu Overview In this lecture, we finish up our previous discussion on optimality conditions
IE 598: Big Data Optimization Fall 2016 Lecture 6: Conic Optimization September 8 Lecturer: Niao He Scriber: Juan Xu Overview In this lecture, we finish up our previous discussion on optimality conditions
SDP Relaxations for MAXCUT
 SDP Relaxations for MAXCUT from Random Hyperplanes to Sum-of-Squares Certificates CATS @ UMD March 3, 2017 Ahmed Abdelkader MAXCUT SDP SOS March 3, 2017 1 / 27 Overview 1 MAXCUT, Hardness and UGC 2 LP
SDP Relaxations for MAXCUT from Random Hyperplanes to Sum-of-Squares Certificates CATS @ UMD March 3, 2017 Ahmed Abdelkader MAXCUT SDP SOS March 3, 2017 1 / 27 Overview 1 MAXCUT, Hardness and UGC 2 LP
Interior Point Algorithms for Constrained Convex Optimization
 Interior Point Algorithms for Constrained Convex Optimization Chee Wei Tan CS 8292 : Advanced Topics in Convex Optimization and its Applications Fall 2010 Outline Inequality constrained minimization problems
Interior Point Algorithms for Constrained Convex Optimization Chee Wei Tan CS 8292 : Advanced Topics in Convex Optimization and its Applications Fall 2010 Outline Inequality constrained minimization problems
Introduction to Semidefinite Programming I: Basic properties a
 Introduction to Semidefinite Programming I: Basic properties and variations on the Goemans-Williamson approximation algorithm for max-cut MFO seminar on Semidefinite Programming May 30, 2010 Semidefinite
Introduction to Semidefinite Programming I: Basic properties and variations on the Goemans-Williamson approximation algorithm for max-cut MFO seminar on Semidefinite Programming May 30, 2010 Semidefinite
Sparse Optimization Lecture: Dual Certificate in l 1 Minimization
 Sparse Optimization Lecture: Dual Certificate in l 1 Minimization Instructor: Wotao Yin July 2013 Note scriber: Zheng Sun Those who complete this lecture will know what is a dual certificate for l 1 minimization
Sparse Optimization Lecture: Dual Certificate in l 1 Minimization Instructor: Wotao Yin July 2013 Note scriber: Zheng Sun Those who complete this lecture will know what is a dual certificate for l 1 minimization
Chapter 6 Interior-Point Approach to Linear Programming
 Chapter 6 Interior-Point Approach to Linear Programming Objectives: Introduce Basic Ideas of Interior-Point Methods. Motivate further research and applications. Slide#1 Linear Programming Problem Minimize
Chapter 6 Interior-Point Approach to Linear Programming Objectives: Introduce Basic Ideas of Interior-Point Methods. Motivate further research and applications. Slide#1 Linear Programming Problem Minimize
Solving conic optimization problems via self-dual embedding and facial reduction: a unified approach
 Solving conic optimization problems via self-dual embedding and facial reduction: a unified approach Frank Permenter Henrik A. Friberg Erling D. Andersen August 18, 216 Abstract We establish connections
Solving conic optimization problems via self-dual embedding and facial reduction: a unified approach Frank Permenter Henrik A. Friberg Erling D. Andersen August 18, 216 Abstract We establish connections
An E cient A ne-scaling Algorithm for Hyperbolic Programming
 An E cient A ne-scaling Algorithm for Hyperbolic Programming Jim Renegar joint work with Mutiara Sondjaja 1 Euclidean space A homogeneous polynomial p : E!R is hyperbolic if there is a vector e 2E such
An E cient A ne-scaling Algorithm for Hyperbolic Programming Jim Renegar joint work with Mutiara Sondjaja 1 Euclidean space A homogeneous polynomial p : E!R is hyperbolic if there is a vector e 2E such
Note 3: LP Duality. If the primal problem (P) in the canonical form is min Z = n (1) then the dual problem (D) in the canonical form is max W = m (2)
 in the canonical form is min Z = n (1) then the dual problem (D) in the canonical form is max W = m (2)") Note 3: LP Duality If the primal problem (P) in the canonical form is min Z = n j=1 c j x j s.t. nj=1 a ij x j b i i = 1, 2,..., m (1) x j 0 j = 1, 2,..., n, then the dual problem (D) in the canonical
Note 3: LP Duality If the primal problem (P) in the canonical form is min Z = n j=1 c j x j s.t. nj=1 a ij x j b i i = 1, 2,..., m (1) x j 0 j = 1, 2,..., n, then the dual problem (D) in the canonical
The Q Method for Symmetric Cone Programmin
 The Q Method for Symmetric Cone Programming The Q Method for Symmetric Cone Programmin Farid Alizadeh and Yu Xia alizadeh@rutcor.rutgers.edu, xiay@optlab.mcma Large Scale Nonlinear and Semidefinite Progra
The Q Method for Symmetric Cone Programming The Q Method for Symmetric Cone Programmin Farid Alizadeh and Yu Xia alizadeh@rutcor.rutgers.edu, xiay@optlab.mcma Large Scale Nonlinear and Semidefinite Progra
Example: feasibility. Interpretation as formal proof. Example: linear inequalities and Farkas lemma
 4-1 Algebra and Duality P. Parrilo and S. Lall 2006.06.07.01 4. Algebra and Duality Example: non-convex polynomial optimization Weak duality and duality gap The dual is not intrinsic The cone of valid
4-1 Algebra and Duality P. Parrilo and S. Lall 2006.06.07.01 4. Algebra and Duality Example: non-convex polynomial optimization Weak duality and duality gap The dual is not intrinsic The cone of valid
Semidefinite Programming Basics and Applications
 Semidefinite Programming Basics and Applications Ray Pörn, principal lecturer Åbo Akademi University Novia University of Applied Sciences Content What is semidefinite programming (SDP)? How to represent
Semidefinite Programming Basics and Applications Ray Pörn, principal lecturer Åbo Akademi University Novia University of Applied Sciences Content What is semidefinite programming (SDP)? How to represent
1 Review of last lecture and introduction
 Semidefinite Programming Lecture 10 OR 637 Spring 2008 April 16, 2008 (Wednesday) Instructor: Michael Jeremy Todd Scribe: Yogeshwer (Yogi) Sharma 1 Review of last lecture and introduction Let us first
Semidefinite Programming Lecture 10 OR 637 Spring 2008 April 16, 2008 (Wednesday) Instructor: Michael Jeremy Todd Scribe: Yogeshwer (Yogi) Sharma 1 Review of last lecture and introduction Let us first
Strong Duality and Minimal Representations for Cone Optimization
 Strong Duality and Minimal Representations for Cone Optimization Levent Tunçel Henry Wolkowicz August 2008, revised: December 2010 University of Waterloo Department of Combinatorics & Optimization Waterloo,
Strong Duality and Minimal Representations for Cone Optimization Levent Tunçel Henry Wolkowicz August 2008, revised: December 2010 University of Waterloo Department of Combinatorics & Optimization Waterloo,
Lecture 9 Sequential unconstrained minimization
 S. Boyd EE364 Lecture 9 Sequential unconstrained minimization brief history of SUMT & IP methods logarithmic barrier function central path UMT & SUMT complexity analysis feasibility phase generalized inequalities
S. Boyd EE364 Lecture 9 Sequential unconstrained minimization brief history of SUMT & IP methods logarithmic barrier function central path UMT & SUMT complexity analysis feasibility phase generalized inequalities
Advances in Convex Optimization: Theory, Algorithms, and Applications
 Advances in Convex Optimization: Theory, Algorithms, and Applications Stephen Boyd Electrical Engineering Department Stanford University (joint work with Lieven Vandenberghe, UCLA) ISIT 02 ISIT 02 Lausanne
Advances in Convex Optimization: Theory, Algorithms, and Applications Stephen Boyd Electrical Engineering Department Stanford University (joint work with Lieven Vandenberghe, UCLA) ISIT 02 ISIT 02 Lausanne
On Two Measures of Problem Instance Complexity and their Correlation with the Performance of SeDuMi on Second-Order Cone Problems
 2016 Springer International Publishing AG. Part of Springer Nature. http://dx.doi.org/10.1007/s10589-005-3911-0 On Two Measures of Problem Instance Complexity and their Correlation with the Performance
2016 Springer International Publishing AG. Part of Springer Nature. http://dx.doi.org/10.1007/s10589-005-3911-0 On Two Measures of Problem Instance Complexity and their Correlation with the Performance
On positive duality gaps in semidefinite programming
 On positive duality gaps in semidefinite programming Gábor Pataki arxiv:82.796v [math.oc] 3 Dec 28 January, 29 Abstract We present a novel analysis of semidefinite programs (SDPs) with positive duality
On positive duality gaps in semidefinite programming Gábor Pataki arxiv:82.796v [math.oc] 3 Dec 28 January, 29 Abstract We present a novel analysis of semidefinite programs (SDPs) with positive duality
Tutorial on Convex Optimization: Part II
 Tutorial on Convex Optimization: Part II Dr. Khaled Ardah Communications Research Laboratory TU Ilmenau Dec. 18, 2018 Outline Convex Optimization Review Lagrangian Duality Applications Optimal Power Allocation
Tutorial on Convex Optimization: Part II Dr. Khaled Ardah Communications Research Laboratory TU Ilmenau Dec. 18, 2018 Outline Convex Optimization Review Lagrangian Duality Applications Optimal Power Allocation
Lagrangian-Conic Relaxations, Part I: A Unified Framework and Its Applications to Quadratic Optimization Problems
 Lagrangian-Conic Relaxations, Part I: A Unified Framework and Its Applications to Quadratic Optimization Problems Naohiko Arima, Sunyoung Kim, Masakazu Kojima, and Kim-Chuan Toh Abstract. In Part I of
Lagrangian-Conic Relaxations, Part I: A Unified Framework and Its Applications to Quadratic Optimization Problems Naohiko Arima, Sunyoung Kim, Masakazu Kojima, and Kim-Chuan Toh Abstract. In Part I of
Extreme Abridgment of Boyd and Vandenberghe s Convex Optimization
 Extreme Abridgment of Boyd and Vandenberghe s Convex Optimization Compiled by David Rosenberg Abstract Boyd and Vandenberghe s Convex Optimization book is very well-written and a pleasure to read. The
Extreme Abridgment of Boyd and Vandenberghe s Convex Optimization Compiled by David Rosenberg Abstract Boyd and Vandenberghe s Convex Optimization book is very well-written and a pleasure to read. The
CS711008Z Algorithm Design and Analysis
 CS711008Z Algorithm Design and Analysis Lecture 8 Linear programming: interior point method Dongbo Bu Institute of Computing Technology Chinese Academy of Sciences, Beijing, China 1 / 31 Outline Brief
CS711008Z Algorithm Design and Analysis Lecture 8 Linear programming: interior point method Dongbo Bu Institute of Computing Technology Chinese Academy of Sciences, Beijing, China 1 / 31 Outline Brief
Optimization WS 13/14:, by Y. Goldstein/K. Reinert, 9. Dezember 2013, 16: Linear programming. Optimization Problems
 Optimization WS 13/14:, by Y. Goldstein/K. Reinert, 9. Dezember 2013, 16:38 2001 Linear programming Optimization Problems General optimization problem max{z(x) f j (x) 0,x D} or min{z(x) f j (x) 0,x D}
Optimization WS 13/14:, by Y. Goldstein/K. Reinert, 9. Dezember 2013, 16:38 2001 Linear programming Optimization Problems General optimization problem max{z(x) f j (x) 0,x D} or min{z(x) f j (x) 0,x D}
Convex Optimization. (EE227A: UC Berkeley) Lecture 28. Suvrit Sra. (Algebra + Optimization) 02 May, 2013
 Lecture 28. Suvrit Sra. (Algebra + Optimization) 02 May, 2013") Convex Optimization (EE227A: UC Berkeley) Lecture 28 (Algebra + Optimization) 02 May, 2013 Suvrit Sra Admin Poster presentation on 10th May mandatory HW, Midterm, Quiz to be reweighted Project final report
Convex Optimization (EE227A: UC Berkeley) Lecture 28 (Algebra + Optimization) 02 May, 2013 Suvrit Sra Admin Poster presentation on 10th May mandatory HW, Midterm, Quiz to be reweighted Project final report
LMI MODELLING 4. CONVEX LMI MODELLING. Didier HENRION. LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ. Universidad de Valladolid, SP March 2009
 LMI MODELLING 4. CONVEX LMI MODELLING Didier HENRION LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ Universidad de Valladolid, SP March 2009 Minors A minor of a matrix F is the determinant of a submatrix
LMI MODELLING 4. CONVEX LMI MODELLING Didier HENRION LAAS-CNRS Toulouse, FR Czech Tech Univ Prague, CZ Universidad de Valladolid, SP March 2009 Minors A minor of a matrix F is the determinant of a submatrix
Integer Programming ISE 418. Lecture 12. Dr. Ted Ralphs
 Integer Programming ISE 418 Lecture 12 Dr. Ted Ralphs ISE 418 Lecture 12 1 Reading for This Lecture Nemhauser and Wolsey Sections II.2.1 Wolsey Chapter 9 ISE 418 Lecture 12 2 Generating Stronger Valid
Integer Programming ISE 418 Lecture 12 Dr. Ted Ralphs ISE 418 Lecture 12 1 Reading for This Lecture Nemhauser and Wolsey Sections II.2.1 Wolsey Chapter 9 ISE 418 Lecture 12 2 Generating Stronger Valid
COURSE ON LMI PART I.2 GEOMETRY OF LMI SETS. Didier HENRION henrion
 COURSE ON LMI PART I.2 GEOMETRY OF LMI SETS Didier HENRION www.laas.fr/ henrion October 2006 Geometry of LMI sets Given symmetric matrices F i we want to characterize the shape in R n of the LMI set F
COURSE ON LMI PART I.2 GEOMETRY OF LMI SETS Didier HENRION www.laas.fr/ henrion October 2006 Geometry of LMI sets Given symmetric matrices F i we want to characterize the shape in R n of the LMI set F
A QUADRATIC CONE RELAXATION-BASED ALGORITHM FOR LINEAR PROGRAMMING
 A QUADRATIC CONE RELAXATION-BASED ALGORITHM FOR LINEAR PROGRAMMING A Dissertation Presented to the Faculty of the Graduate School of Cornell University in Partial Fulfillment of the Requirements for the
A QUADRATIC CONE RELAXATION-BASED ALGORITHM FOR LINEAR PROGRAMMING A Dissertation Presented to the Faculty of the Graduate School of Cornell University in Partial Fulfillment of the Requirements for the
5. Duality. Lagrangian
 5. Duality Convex Optimization Boyd & Vandenberghe Lagrange dual problem weak and strong duality geometric interpretation optimality conditions perturbation and sensitivity analysis examples generalized
5. Duality Convex Optimization Boyd & Vandenberghe Lagrange dual problem weak and strong duality geometric interpretation optimality conditions perturbation and sensitivity analysis examples generalized
Dual Basic Solutions. Observation 5.7. Consider LP in standard form with A 2 R m n,rank(a) =m, and dual LP:
 =m, and dual LP:") Dual Basic Solutions Consider LP in standard form with A 2 R m n,rank(a) =m, and dual LP: Observation 5.7. AbasisB yields min c T x max p T b s.t. A x = b s.t. p T A apple c T x 0 aprimalbasicsolutiongivenbyx
Dual Basic Solutions Consider LP in standard form with A 2 R m n,rank(a) =m, and dual LP: Observation 5.7. AbasisB yields min c T x max p T b s.t. A x = b s.t. p T A apple c T x 0 aprimalbasicsolutiongivenbyx
Agenda. 1 Duality for LP. 2 Theorem of alternatives. 3 Conic Duality. 4 Dual cones. 5 Geometric view of cone programs. 6 Conic duality theorem
 Agenda 1 Duality for LP 2 Theorem of alternatives 3 Conic Duality 4 Dual cones 5 Geometric view of cone programs 6 Conic duality theorem 7 Examples Lower bounds on LPs By eliminating variables (if needed)
Agenda 1 Duality for LP 2 Theorem of alternatives 3 Conic Duality 4 Dual cones 5 Geometric view of cone programs 6 Conic duality theorem 7 Examples Lower bounds on LPs By eliminating variables (if needed)
Example Problem. Linear Program (standard form) CSCI5654 (Linear Programming, Fall 2013) Lecture-7. Duality
 CSCI5654 (Linear Programming, Fall 2013) Lecture-7. Duality") CSCI5654 (Linear Programming, Fall 013) Lecture-7 Duality Lecture 7 Slide# 1 Lecture 7 Slide# Linear Program (standard form) Example Problem maximize c 1 x 1 + + c n x n s.t. a j1 x 1 + + a jn x n b j
CSCI5654 (Linear Programming, Fall 013) Lecture-7 Duality Lecture 7 Slide# 1 Lecture 7 Slide# Linear Program (standard form) Example Problem maximize c 1 x 1 + + c n x n s.t. a j1 x 1 + + a jn x n b j
Primal-Dual Interior-Point Methods for Linear Programming based on Newton s Method
 Primal-Dual Interior-Point Methods for Linear Programming based on Newton s Method Robert M. Freund March, 2004 2004 Massachusetts Institute of Technology. The Problem The logarithmic barrier approach
Primal-Dual Interior-Point Methods for Linear Programming based on Newton s Method Robert M. Freund March, 2004 2004 Massachusetts Institute of Technology. The Problem The logarithmic barrier approach
Primal-Dual Symmetric Interior-Point Methods from SDP to Hyperbolic Cone Programming and Beyond
 Primal-Dual Symmetric Interior-Point Methods from SDP to Hyperbolic Cone Programming and Beyond Tor Myklebust Levent Tunçel September 26, 2014 Convex Optimization in Conic Form (P) inf c, x A(x) = b, x
Primal-Dual Symmetric Interior-Point Methods from SDP to Hyperbolic Cone Programming and Beyond Tor Myklebust Levent Tunçel September 26, 2014 Convex Optimization in Conic Form (P) inf c, x A(x) = b, x
A note on alternating projections for ill-posed semidefinite feasibility problems
 Noname manuscript No. (will be inserted by the editor A note on alternating projections for ill-posed semidefinite feasibility problems Dmitriy Drusvyatskiy Guoyin Li Henry Wolkowicz Received: date / Accepted:
Noname manuscript No. (will be inserted by the editor A note on alternating projections for ill-posed semidefinite feasibility problems Dmitriy Drusvyatskiy Guoyin Li Henry Wolkowicz Received: date / Accepted:
Convex Optimization Boyd & Vandenberghe. 5. Duality
 5. Duality Convex Optimization Boyd & Vandenberghe Lagrange dual problem weak and strong duality geometric interpretation optimality conditions perturbation and sensitivity analysis examples generalized
5. Duality Convex Optimization Boyd & Vandenberghe Lagrange dual problem weak and strong duality geometric interpretation optimality conditions perturbation and sensitivity analysis examples generalized
arxiv: v1 [math.oc] 21 Jan 2019
![arxiv: v1 [math.oc] 21 Jan 2019](/thumbs/88/115040513.jpg "arxiv: v1 [math.oc] 21 Jan 2019") STATUS DETERMINATION BY INTERIOR-POINT METHODS FOR CONVEX OPTIMIZATION PROBLEMS IN DOMAIN-DRIVEN FORM MEHDI KARIMI AND LEVENT TUNÇEL arxiv:1901.07084v1 [math.oc] 21 Jan 2019 Abstract. We study the geometry
STATUS DETERMINATION BY INTERIOR-POINT METHODS FOR CONVEX OPTIMIZATION PROBLEMS IN DOMAIN-DRIVEN FORM MEHDI KARIMI AND LEVENT TUNÇEL arxiv:1901.07084v1 [math.oc] 21 Jan 2019 Abstract. We study the geometry
A notion of Total Dual Integrality for Convex, Semidefinite and Extended Formulations
 A notion of for Convex, Semidefinite and Extended Formulations Marcel de Carli Silva Levent Tunçel April 26, 2018 A vector in R n is integral if each of its components is an integer, A vector in R n is
A notion of for Convex, Semidefinite and Extended Formulations Marcel de Carli Silva Levent Tunçel April 26, 2018 A vector in R n is integral if each of its components is an integer, A vector in R n is
l p -Norm Constrained Quadratic Programming: Conic Approximation Methods
 OUTLINE l p -Norm Constrained Quadratic Programming: Conic Approximation Methods Wenxun Xing Department of Mathematical Sciences Tsinghua University, Beijing Email: wxing@math.tsinghua.edu.cn OUTLINE OUTLINE
OUTLINE l p -Norm Constrained Quadratic Programming: Conic Approximation Methods Wenxun Xing Department of Mathematical Sciences Tsinghua University, Beijing Email: wxing@math.tsinghua.edu.cn OUTLINE OUTLINE
Iterative LP and SOCP-based. approximations to. sum of squares programs. Georgina Hall Princeton University. Joint work with:
 Iterative LP and SOCP-based approximations to sum of squares programs Georgina Hall Princeton University Joint work with: Amir Ali Ahmadi (Princeton University) Sanjeeb Dash (IBM) Sum of squares programs
Iterative LP and SOCP-based approximations to sum of squares programs Georgina Hall Princeton University Joint work with: Amir Ali Ahmadi (Princeton University) Sanjeeb Dash (IBM) Sum of squares programs
Introduction to Semidefinite Programs
 Introduction to Semidefinite Programs Masakazu Kojima, Tokyo Institute of Technology Semidefinite Programming and Its Application January, 2006 Institute for Mathematical Sciences National University of
Introduction to Semidefinite Programs Masakazu Kojima, Tokyo Institute of Technology Semidefinite Programming and Its Application January, 2006 Institute for Mathematical Sciences National University of
A General Framework for Convex Relaxation of Polynomial Optimization Problems over Cones
 Research Reports on Mathematical and Computing Sciences Series B : Operations Research Department of Mathematical and Computing Sciences Tokyo Institute of Technology 2-12-1 Oh-Okayama, Meguro-ku, Tokyo
Research Reports on Mathematical and Computing Sciences Series B : Operations Research Department of Mathematical and Computing Sciences Tokyo Institute of Technology 2-12-1 Oh-Okayama, Meguro-ku, Tokyo
Convex Optimization and Modeling
 Convex Optimization and Modeling Convex Optimization Fourth lecture, 05.05.2010 Jun.-Prof. Matthias Hein Reminder from last time Convex functions: first-order condition: f(y) f(x) + f x,y x, second-order
Convex Optimization and Modeling Convex Optimization Fourth lecture, 05.05.2010 Jun.-Prof. Matthias Hein Reminder from last time Convex functions: first-order condition: f(y) f(x) + f x,y x, second-order
Duality revisited. Javier Peña Convex Optimization /36-725
 Duality revisited Javier Peña Conve Optimization 10-725/36-725 1 Last time: barrier method Main idea: approimate the problem f() + I C () with the barrier problem f() + 1 t φ() tf() + φ() where t > 0 and
Duality revisited Javier Peña Conve Optimization 10-725/36-725 1 Last time: barrier method Main idea: approimate the problem f() + I C () with the barrier problem f() + 1 t φ() tf() + φ() where t > 0 and
Conic Linear Optimization and its Dual. yyye
 Conic Linear Optimization and Appl. MS&E314 Lecture Note #04 1 Conic Linear Optimization and its Dual Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A.
Conic Linear Optimization and Appl. MS&E314 Lecture Note #04 1 Conic Linear Optimization and its Dual Yinyu Ye Department of Management Science and Engineering Stanford University Stanford, CA 94305, U.S.A.
Motivating examples Introduction to algorithms Simplex algorithm. On a particular example General algorithm. Duality An application to game theory
 Instructor: Shengyu Zhang 1 LP Motivating examples Introduction to algorithms Simplex algorithm On a particular example General algorithm Duality An application to game theory 2 Example 1: profit maximization
Instructor: Shengyu Zhang 1 LP Motivating examples Introduction to algorithms Simplex algorithm On a particular example General algorithm Duality An application to game theory 2 Example 1: profit maximization
A Strongly Polynomial Simplex Method for Totally Unimodular LP
 A Strongly Polynomial Simplex Method for Totally Unimodular LP Shinji Mizuno July 19, 2014 Abstract Kitahara and Mizuno get new bounds for the number of distinct solutions generated by the simplex method
A Strongly Polynomial Simplex Method for Totally Unimodular LP Shinji Mizuno July 19, 2014 Abstract Kitahara and Mizuno get new bounds for the number of distinct solutions generated by the simplex method
Semidefinite Programming, Combinatorial Optimization and Real Algebraic Geometry
 Semidefinite Programming, Combinatorial Optimization and Real Algebraic Geometry assoc. prof., Ph.D. 1 1 UNM - Faculty of information studies Edinburgh, 16. September 2014 Outline Introduction Definition
Semidefinite Programming, Combinatorial Optimization and Real Algebraic Geometry assoc. prof., Ph.D. 1 1 UNM - Faculty of information studies Edinburgh, 16. September 2014 Outline Introduction Definition
Fast Algorithms for SDPs derived from the Kalman-Yakubovich-Popov Lemma
 Fast Algorithms for SDPs derived from the Kalman-Yakubovich-Popov Lemma Venkataramanan (Ragu) Balakrishnan School of ECE, Purdue University 8 September 2003 European Union RTN Summer School on Multi-Agent
Fast Algorithms for SDPs derived from the Kalman-Yakubovich-Popov Lemma Venkataramanan (Ragu) Balakrishnan School of ECE, Purdue University 8 September 2003 European Union RTN Summer School on Multi-Agent
Support Vector Machines: Maximum Margin Classifiers
 Support Vector Machines: Maximum Margin Classifiers Machine Learning and Pattern Recognition: September 16, 2008 Piotr Mirowski Based on slides by Sumit Chopra and Fu-Jie Huang 1 Outline What is behind
Support Vector Machines: Maximum Margin Classifiers Machine Learning and Pattern Recognition: September 16, 2008 Piotr Mirowski Based on slides by Sumit Chopra and Fu-Jie Huang 1 Outline What is behind
14. Duality. ˆ Upper and lower bounds. ˆ General duality. ˆ Constraint qualifications. ˆ Counterexample. ˆ Complementary slackness.
 CS/ECE/ISyE 524 Introduction to Optimization Spring 2016 17 14. Duality ˆ Upper and lower bounds ˆ General duality ˆ Constraint qualifications ˆ Counterexample ˆ Complementary slackness ˆ Examples ˆ Sensitivity
CS/ECE/ISyE 524 Introduction to Optimization Spring 2016 17 14. Duality ˆ Upper and lower bounds ˆ General duality ˆ Constraint qualifications ˆ Counterexample ˆ Complementary slackness ˆ Examples ˆ Sensitivity
LECTURE 10 LECTURE OUTLINE
 LECTURE 10 LECTURE OUTLINE Min Common/Max Crossing Th. III Nonlinear Farkas Lemma/Linear Constraints Linear Programming Duality Convex Programming Duality Optimality Conditions Reading: Sections 4.5, 5.1,5.2,
LECTURE 10 LECTURE OUTLINE Min Common/Max Crossing Th. III Nonlinear Farkas Lemma/Linear Constraints Linear Programming Duality Convex Programming Duality Optimality Conditions Reading: Sections 4.5, 5.1,5.2,
Lecture: Cone programming. Approximating the Lorentz cone.
 Strong relaxations for discrete optimization problems 10/05/16 Lecture: Cone programming. Approximating the Lorentz cone. Lecturer: Yuri Faenza Scribes: Igor Malinović 1 Introduction Cone programming is
Strong relaxations for discrete optimization problems 10/05/16 Lecture: Cone programming. Approximating the Lorentz cone. Lecturer: Yuri Faenza Scribes: Igor Malinović 1 Introduction Cone programming is
EE 227A: Convex Optimization and Applications October 14, 2008
 EE 227A: Convex Optimization and Applications October 14, 2008 Lecture 13: SDP Duality Lecturer: Laurent El Ghaoui Reading assignment: Chapter 5 of BV. 13.1 Direct approach 13.1.1 Primal problem Consider
EE 227A: Convex Optimization and Applications October 14, 2008 Lecture 13: SDP Duality Lecturer: Laurent El Ghaoui Reading assignment: Chapter 5 of BV. 13.1 Direct approach 13.1.1 Primal problem Consider
A solution approach for linear optimization with completely positive matrices
 A solution approach for linear optimization with completely positive matrices Franz Rendl http://www.math.uni-klu.ac.at Alpen-Adria-Universität Klagenfurt Austria joint work with M. Bomze (Wien) and F.
A solution approach for linear optimization with completely positive matrices Franz Rendl http://www.math.uni-klu.ac.at Alpen-Adria-Universität Klagenfurt Austria joint work with M. Bomze (Wien) and F.
Convex Optimization and Modeling
 Convex Optimization and Modeling Duality Theory and Optimality Conditions 5th lecture, 12.05.2010 Jun.-Prof. Matthias Hein Program of today/next lecture Lagrangian and duality: the Lagrangian the dual
Convex Optimization and Modeling Duality Theory and Optimality Conditions 5th lecture, 12.05.2010 Jun.-Prof. Matthias Hein Program of today/next lecture Lagrangian and duality: the Lagrangian the dual
Robust conic quadratic programming with ellipsoidal uncertainties
 Robust conic quadratic programming with ellipsoidal uncertainties Roland Hildebrand (LJK Grenoble 1 / CNRS, Grenoble) KTH, Stockholm; November 13, 2008 1 Uncertain conic programs min x c, x : Ax + b K
Robust conic quadratic programming with ellipsoidal uncertainties Roland Hildebrand (LJK Grenoble 1 / CNRS, Grenoble) KTH, Stockholm; November 13, 2008 1 Uncertain conic programs min x c, x : Ax + b K
- Well-characterized problems, min-max relations, approximate certificates. - LP problems in the standard form, primal and dual linear programs
 LP-Duality ( Approximation Algorithms by V. Vazirani, Chapter 12) - Well-characterized problems, min-max relations, approximate certificates - LP problems in the standard form, primal and dual linear programs
LP-Duality ( Approximation Algorithms by V. Vazirani, Chapter 12) - Well-characterized problems, min-max relations, approximate certificates - LP problems in the standard form, primal and dual linear programs
Interior-point methods Optimization Geoff Gordon Ryan Tibshirani
 Interior-point methods 10-725 Optimization Geoff Gordon Ryan Tibshirani SVM duality Review min v T v/2 + 1 T s s.t. Av yd + s 1 0 s 0 max 1 T α α T Kα/2 s.t. y T α = 0 0 α 1 Gram matrix K Interpretation
Interior-point methods 10-725 Optimization Geoff Gordon Ryan Tibshirani SVM duality Review min v T v/2 + 1 T s s.t. Av yd + s 1 0 s 0 max 1 T α α T Kα/2 s.t. y T α = 0 0 α 1 Gram matrix K Interpretation
Tutorial on Convex Optimization for Engineers Part II
 Tutorial on Convex Optimization for Engineers Part II M.Sc. Jens Steinwandt Communications Research Laboratory Ilmenau University of Technology PO Box 100565 D-98684 Ilmenau, Germany jens.steinwandt@tu-ilmenau.de
Tutorial on Convex Optimization for Engineers Part II M.Sc. Jens Steinwandt Communications Research Laboratory Ilmenau University of Technology PO Box 100565 D-98684 Ilmenau, Germany jens.steinwandt@tu-ilmenau.de
Linear Programming. Chapter Introduction
 Chapter 3 Linear Programming Linear programs (LP) play an important role in the theory and practice of optimization problems. Many COPs can directly be formulated as LPs. Furthermore, LPs are invaluable
Chapter 3 Linear Programming Linear programs (LP) play an important role in the theory and practice of optimization problems. Many COPs can directly be formulated as LPs. Furthermore, LPs are invaluable
Facial Reduction for Cone Optimization
 Facial Reduction for Cone Optimization Henry Wolkowicz Dept. Combinatorics and Optimization University of Waterloo Tuesday Apr. 21, 2015 (with: Drusvyatskiy, Krislock, (Cheung) Voronin) Motivation: Loss
Facial Reduction for Cone Optimization Henry Wolkowicz Dept. Combinatorics and Optimization University of Waterloo Tuesday Apr. 21, 2015 (with: Drusvyatskiy, Krislock, (Cheung) Voronin) Motivation: Loss